Capıtulo 5 DIN´AMICA
Anuncio

Capı́tulo 5
DINÁMICA
5.1. Introducción
La cinemática estudia como ya sabemos el movimiento como una relación espacio-temporal,
sin analizar cuales son las causas que lo producen.
La dinámica tiene por objeto el estudio del movimiento en relación con las causas que lo
originan. Dichas causas son las fuerzas.
El problema dinámico consistirá en definir las fuerzas y determinar el movimiento que éstas
imprimirán a un punto material o bien a un conjunto de puntos materiales o sistema.
5.2. Fuerzas
El estado de movimiento o reposo de un cuerpo material depende de sus interacciones
mecánicas con otros cuerpos.
La magnitud que es la medida cuantitativa de la interacción mecánica de los cuerpos materiales se denomina fuerza.
La fuerza es una magnitud vectorial, y como tal, su conocimiento completo queda determinado por:
El módulo.
La dirección.
El sentido.
El punto de aplicación.
172
CAPÍTULO 5. DINÁMICA
173
Las fuerzas que actúan sobre una partı́cula individual podrán ser clasificadas en las siguientes
clases:
1. Fuerzas activas y fuerzas reactivas.
Las fuerzas activas son las que tienden a producir el movimiento. Por el contrario,
las fuerzas reactivas, vinculares o de enlace, no tienden a mover los cuerpos, sino que
se oponen a que éstos ocupen determinadas posiciones o se muevan de determinada
manera.
2. Fuerzas interiores y fuerzas exteriores.
Para una partı́cula material, encuadrada dentro de un sistema, la interacción mecánica
proveniente de otras partı́culas de ese mismo sistema será una fuerza interior.
Si la interacción proviene de partı́culas ubicadas en otro sistema, se tratará de una
fuerza exterior.
3. Fuerzas de campo.
Se originan por la existencia de un campo de furezas. Dicho campo puede ser de distintos tipos: gravitatorio, electrostático, electromagnético, etc.
Se producen sobre partı́culas que poseen una determinada propiedad denominada magnitud activa, cuando se sitúan en el espacio geométrico en el que existe el campo considerado.
4. Fuerzas de rozamiento.
Se producen en los puntos de contacto entre dos sistemas materiales, y tienden a oponerse al desplazamiento relativo entre ambos.
5. Fuerzas de inercia.
Se presentan sobre una partı́cula material cuando referimos su posición a un sistema
referencial no inercial.
5.3. El sistema referencial en la dinámica. Diferencia con
la referencia en la cinemática
El sistema referencial que en la cinemática denominabamos fijo no debı́a cumplir ninguna
condición especial, salvo nuestra voluntad de ası́ considerarlo.
En la dinámica, el sistema referencial que denominaremos fijo, o más propiamente inercial, deberá cumplir una de las leyes de Newton denominada ley de la inercia.
Dicha ley indica que una partı́cula material situada en una referencia inercial, y sobre la
que no actúa ninguna fuerza, si inicialmente se encuentra en reposo, seguirá en reposo con
respecto a dicha referencia.
CAPÍTULO 5. DINÁMICA
174
Un sistema referencial es inercial cuando se encuentra en reposo o se traslada con velocidad rectilı́nea y uniforme con respecto a otra referencia inercial.
5.4. Leyes fundamentales de la dinámica
Estas leyes fueron enunciadas por Isaac Newton a finales del siglo XVII en su texto Principios matemáticos de filosofı́a natural.
1. Ley de la inercia:
Todo cuerpo permanece en su estado de reposo o de movimiento rectilı́neo y uniforme, a menos que se altere este estado imprimiéndole una fuerza.
Como ya hemos indicado, un sistema referencial inercial, es aquél en el que se cumple
esta ley.
2. Ley fundamental de la dinámica:
La aceleración del movimiento es proporcional a la fuerza motriz impuesta, y tiene
lugar según la lı́nea de acción en que dicha fuerza actúa.
F~ = m · ~a
En donde m que es la constante de proporcionalidad recibe el nombre de masa inerte.
Esta ley es la fundamental en la dinámica, pues en ella se nos relaciona la variación en
el movimiento, aceleración, que es el efecto, con la causa que lo provoca, la fuerza.
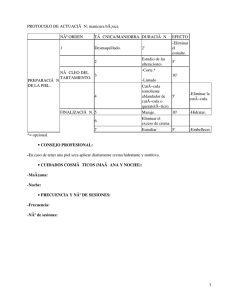
3. Principio de acción y reacción:
La reacción es siempre igual y contraria a la acción: las acciones mutuas entre dos
cuerpos siempre son iguales y se dirigen en sentidos contrarios. ( Ver Figura 5.1 )
2
F21
1
F12
Figura 5.1: Pricipio de acción y reacción
F~12 : Acción que sobre el cuerpo1 ejerce el 2.
CAPÍTULO 5. DINÁMICA
175
F~21 : Acción que sobre el cuerpo 2 ejerce el 1.
F~12 = −F~21
⇒
F~12 + F~21 = ~0
Se suele añadir una cuarta ley, ésta no enunciada por Newton, para que quede completo
todo el fundamento dinámico:
4. Ley de la independencia de las fuerzas:
El efecto que produce una fuerza no depende de la existencia de otras ni del estado
de movimiento del cuerpo.
Si sobre una partı́cula de masa inerte m actúa una fuerza F~1 aparecerá una aceleración
~a1 . Si deja de actuar F~1 , y actúa otra fuerza F~2 que genera una aceleración ~a2 , esta
ley nos indica que si actuase sobre la misma partı́cula una fuerza F~ = F~1 + F~2 , la
aceleración que se imprimirı́a a dicha partı́cula serı́a ~a = ~a1 + ~a2 . ( Ver Figura 5.2 )
F2
a
a2
m
F
a1
F1
Figura 5.2: Ley de la independencia de las fuerzas
5.5. El problema general de la dinámica
La ecuación fundamental de la dinámica podrá expresarse como:
d~v
d2~r
~
F = m · ~a = m ·
=m· 2
dt
dt
Ecuación vectorial que en un espacio tridimensional podrá admitir una descomposición en
las direcciones de los tres ejes de referencia, dando lugar al siguiente sistema de ecuaciones
diferenciales escalares:
d2 x
dvx
F
=
m
·
Fx = m ·
x
dt2
dt
dvy
d2 y
o bien:
Fy = m ·
Fy = m · 2
dt
dt
d2 z
Fz = m · dvz
Fz = m ·
dt
dt2
CAPÍTULO 5. DINÁMICA
176
La fuerza que actúa sobre la partı́cula F~ = Fx ~i + Fy ~j + Fz ~k será en general, una función de la posición, de la velocidad y del tiempo:
F~ = F~ (~r, ~v , t)
El problema general de la dinámica del punto libre o no ligado presenta estas dos posibles
perspectivas:
1. Conocida la ley del movimiento del punto ~r = ~r(t), averiguar cuales son las fuerzas
actuantes que originan este movimiento. Este es el problema directo, y se resuelve por
derivación.
2. Conocidas las fuerzas actuantes, determinar la ley del movimiento. Este problema
se resuelve por integración de las ecuaciones diferenciales. En general se tratará de
tres ecuaciones diferenciales de segundo orden, que originarán seis constantes de integración, obtenibles por las condiciones de contorno del problema.
Si el punto material considerado no fuese libre, sino que se encuentra sometido a unas ciertas ligaduras o vı́nculos, la ecuación general de la dinámica podrı́a ser escrita de la siguiente
forma:
~ = m · ~a
F~ + R
En donde:
F~ : Resultante de las fuerzas activas que actúan sobre la partı́cula.
~ : Resultante de las fuerzas de enlace que actúan sobre la partı́cula.
R
Con lo que el movimiento del punto no libre o enlazado podrı́a considerarse como libre,
al sustituir los enlaces por sus correspondientes fuerzas de reacción.
Los problemas a considerar en la dinámica del punto ligado son fundamentalmente dos:
1. Conocido el movimiento del punto, y las fuerzas activas que actúan sobre él, determinar la fuerza de enlace.
~ = m · ~a; se reEste problema es de fácil resolución, aplicando la ecuación F~ + R
duce solamente a los correspondientes cálculos cinemáticos.
2. Conocidas las fuerzas activas aplicadas al punto, determinar su ley de movimiento y
las reacciones de ligadura.
Este es el problema prioritario o fundamental de la dinámica del punto sometido a
enlaces, y el de más compleja resolución.
CAPÍTULO 5. DINÁMICA
177
5.6. Dinámica de la partı́cula ligada a una trayectoria
Sea una partı́cula material de masa m obligada a recorrer una determinada trayectoria, y
sobre la cual actúan unas determinadas fuerzas activas, cuya resultante es F~ . Sobre esta
~ la cual si el contacto
partı́cula actuarán también las fuerzas de enlace, cuya resultante es R,
partı́cula-trayectoria es sin rozamiento será normal a la trayectoria.
El planteamiento de la ecuación fundamental de la dinámica será en nuestro caso:
~ = m · ~a
F~ + R
Proyectamos esta expresión vectorial sobre la referencia intrı́nseca, en las direcciones tangente, normal principal y binormal, ligadas a la posición del punto en la trayectoria. ( Ver
Figura 5.3 )
b
m
τ
R
η
F
Figura 5.3: Partı́cula ligada a una trayectoria y referencia intrı́nseca
Fτ + R τ = m · a τ
Fη + R η = m · a η
Fb + R b = m · a b
Si como hemos dicho, el enlace partı́cula-trayectoria es sin rozamiento, la fuerza de en~ es normal a la trayectoria, y estará contenida en el plano normal, no dando por tanto
lace R
componente sobre la dirección tangencial. Es decir: Rτ = 0.
Por la cinemática sabemos que el vector aceleración sólo posee componentes normal y tangencial, es decir, se encuentra siempre contenido en el plano osculador, y no tiene por tanto
componente en la dirección binormal. Esto es: ab = 0.
CAPÍTULO 5. DINÁMICA
178
Teniendo en cuenta estas consideraciones, las anteriores ecuaciones nos quedarán:
Fτ = m · a τ = m ·
d2 s
dv
=m· 2
dt
dt
Fη + R η = m · a η = m ·
Fb + R b = 0
v2
ρ
(5.1)
(5.2)
(5.3)
Estas tres ecuaciones nos permiten resolver el problema dinámico de este punto ası́ ligado
en sus dos posibles aspectos.
Concretamente en el problema fundamental, la ecuación (5.1) permite determinar la ley del
movimiento por integración, y las ecuaciones (5.2) y (5.3) permiten determinar la fuerza de
~
enlace R.
Ası́:
v2
− Fη
Rη = m ·
ρ
Rb = −Fb
2
A la componente m · vρ dirigida en la dirección de la normal principal se le conoce con el
nombre de fuerza centrı́peta.
~ ası́ determinado es la fuerza que la trayectoria ejerce sobre la partı́cula. Por
El vector R
~ igual, pero de sentido opuesto a R
~
el principio de acción y reacción existirá una fuerza −R
que es la que la partı́cula realiza sobre la trayectoria.
v2
−Rη = Fη − m ·
ρ
−Rb = Fb
La componente −m ·
v2
ρ
es la denominada fuerza centrı́fuga, igual y opuesta a la centrı́peta.
CAPÍTULO 5. DINÁMICA
179
5.7. Teoremas fundamentales de la dinámica para la partı́cula o masa puntual
Estos teoremas se obtienen directamente de la ley fundamental de la dinámica.
Permiten analizar casos concretos y particulares sin necesidad de plantear el estudio general que nos obligarı́a a realizar todas las operaciones de integración que el planteamiento
general exige.
En la aplicación de los teoremas fundamentales ya se han realizado implı́citamente alguna de las operaciones de integración.
5.7.1. Teorema del momento lineal o de la cantidad de movimiento
Definimos la cantidad de movimiento o momento lineal p~ de una partı́cula material de masa
m, provista de una velocidad ~v como:
p~ = m · ~v
El momento lineal es por tanto una magnitud vectorial cuya dirección y sentido coincide
con el de la velocidad ~v de que va provista la partı́cula.
Considerando la segunda ley de la dinámica de Newton:
d (m · ~v )
d~
p
d~v
=
=
F~ = m · ~a = m ·
dt
dt
dt
Luego:
d~
p
F~ =
dt
(5.4)
Expresión del teorema del momento lineal en su forma diferencial que nos indica que la
derivada de dicho momento con respecto del tiempo es igual a la fuerza aplicada sobre la
partı́cula.
Integrando esta ecuación diferencial vectorial, y aplicando como condiciones de contorno
que para el instante t1 el momento lineal es p~1 , y que para el instante t2 el momento lineal es
p~2 :
d~
p = F~ · dt
=⇒
Z
p
~2
p
~1
d~
p=
Z
t2
t1
F~ · dt
=⇒
p~2 − p~1 =
Z
t2
F~ · dt
t1
Definimos impulso mecánico que recibe una partı́cula entre los instantes t1 y t2 como:
Z t2
F~ · dt
t1
CAPÍTULO 5. DINÁMICA
180
Con lo que el teorema del momento lineal en su versión integrada podrı́a enunciarse en la
siguiente forma: La variación que en un intervalo de tiempo experimenta el momento lineal
de una partı́cula es igual al impulso mecánico que recibe esta partı́cula en dicho intervalo de
tiempo.
Proyectando la expresión vectorial de este teorema sobre los ejes de referencia:
Z t2
p2x − p1x =
Fx · dt
t
1
Z t2
p2y − p1y =
Fy · dt
t1
Z t2
p2z − p1z =
Fz · dt
t1
Este teorema será de utilidad práctica para los casos en que las fuerzas actuantes sobre la
partı́cula sean constantes o variables en función del tiempo.
5.7.2. Teorema del momento angular o cinético
Definimos el momento angular o cinético de una partı́cula con respecto de un punto fijo 0
~ 0 , como el momento de la cantidad de movimiento de dicha partı́cula con respecto a ese
L
punto.
~ 0 = ~r ∧ p~ = ~r ∧ m · ~v
L
En donde ~r es el vector de posición del punto móvil con respecto del punto fijo 0.
~ 0 con respecto del tiempo:
Derivando la expresión del momento angular L
~0
dL
= ~r˙ ∧ p~ + ~r ∧ p~˙
dt
El primer sumando es nulo, por ser ~r˙ = ~v y p~ = m · ~v dos vectores colineales.
El segundo sumando es:
~r ∧ p~˙ = ~r ∧
d~v
d(m · ~v )
~0
= ~r ∧ m ·
= ~r ∧ m · ~a = ~r ∧ F~ = M
dt
dt
Por tanto:
~0
dL
~0
=M
dt
(5.5)
CAPÍTULO 5. DINÁMICA
181
Lo que podrı́a enunciarse como: La derivada con respecto del tiempo del momento angular
de una partı́cula con respecto de un punto, es igual al momento con respecto de dicho punto
de la fuerza que actúa sobre la partı́cula.
Integrando esta ecuación diferencial vectorial, y aplicando como condiciones de contorno
~ 01 , y que para el instante t2 el momento anque para el instante t1 el momento angular es L
~ 02 :
gular es L
~0 = M
~ 0 ·dt
dL
=⇒
Z
~0
L
2
~0 =
dL
~0
L
1
Z
t2
~ 0 ·dt
M
=⇒
~ 0 −L
~0 =
L
2
1
t1
Z
t2
~ 0 ·dt
M
t1
Con lo que el teorema del momento angular en su versión integrada podrı́a enunciarse en
la siguiente forma: La variación que en un intervalo de tiempo experimenta el momento angular de una partı́cula con respecto de un punto fijo es igual al impulso angular con respecto
a ese punto que recibe esta partı́cula en dicho intervalo de tiempo.
Teniendo en cuenta el concepto de momento axial, podrı́amos proyectar la ecuación (5.5)
sobre un eje cualquiera ξ que pase por 0, y obtendrı́amos el teorema del momento angular
con respecto de un eje ξ:
dLξ
= Mξ
dt
El teorema del momento angular tiene particular importancia en el problema de la partı́cula
sometida a fuerzas centrales, es decir, fuerzas que se dirigen siempre hacia un determinado
punto fijo, cual es el caso de la acción gravitatoria entre el Sol y los planetas.
Dinámica de las partı́culas sometidas a fuerzas centrales. Ley de las áreas
Si una partı́cula se encuentra sometida a una fuerza que está constantemente dirigida hacia
un punto central fijo 0, en ese caso:
~ 0 = ~0
M
=⇒
~0
dL
= ~0
dt
=⇒
~ 0 = Kte
~
L
~ 0 = Kte,
~ es que la trayectoria
La primera conclusión que se deduce del hecho de que L
~
debe ser una curva plana para que la dirección del vector L0 se mantenga invariable.
La segunda conclusión será que la velocidad de la partı́cula deberá ser tal que las áreas
barridas por el radio vector que partiendo del punto fijo 0, marca la posición de la
partı́cula, en intervalos de tiempo iguales, serán iguales, es decir, la velocidad areolar
será constante. En efecto:
CAPÍTULO 5. DINÁMICA
182
El área barrida en un instante dt será: ( Ver Figura 5.4 )
1
1 ds = |d~s| = · (~r ∧ d~r) = · (~r ∧ d~r)
2
2
Y la velocidad areolar:
!
d~r 1 ds d~s 1
= = · ~r ∧
= · (~r ∧ ~v )
dt dt 2
dt 2
r +dr
dr
ds
0
r
Figura 5.4: Diferencial de área barrida por el vector ~r
~ 0 = Kte
~ por ser la fuerza de tipo central:
Como L
~ 0 = ~r ∧ m · ~v = Kte
~
L
=⇒
~
~r ∧ ~v = Kte
ds
= Kte
dt
=⇒
Por tanto, la velocidad areolar será constante, lo que se traduce en la denominada ley de
las áreas o de Kepler. En el caso de las fuerzas centrales, las áreas barridas por el radio
vector trazado desde el punto central, en intervalos de tiempo iguales, serán iguales.
Esto obliga a que el punto móvil sea más rápido en su movimiento en la trayectoria en
las proximidades del punto central, que en las zonas de la trayectoria más alejadas del
mismo. ( Ver Figura 5.5 )
B
C
D
A
a
a
0
Figura 5.5: Ley de las áreas o de Kepler
CAPÍTULO 5. DINÁMICA
183
5.7.3. Teorema de la energı́a cinética
Denominamos fuerza viva de una partı́cula material en movimiento al producto de su masa
por el cuadrado de su velocidad, es decir:
Fuerza viva = m · v 2
Se denomina energı́a cinética de una partı́cula material en movimiento a su semifuerza viva:
T =
1
m · v2
2
Ambos conceptos corresponden a magnitudes escalares y positivas.
La fuerza viva también podrı́a definirse como el producto escalar del momento lineal por
la velocidad:
Fuerza viva = p~ · ~v = (m · ~v ) · ~v = m · (~v · ~v ) = m · ~v 2 = m · v 2
Diferenciando esta expresión de la fuerza viva:
d(m · v 2 ) = d(m · ~v 2 ) = m · 2 · ~v · d~v = 2 m
d~v
~v dt = 2 m ~a d~r = 2 F~ d~r
dt
Expresión que podrá ser integrada, estableciendo como condiciones de contorno que para
la posición de la partı́cula dada por ~r = ~r0 el módulo de la velocidad es v0 , en tanto que para
la posición definida por ~r, el módulo de la velocidad es v.
Z
v
2
d(m · v ) = 2
v0
Z
~r
F~ d~r
=⇒
2
m·v −m·
~r0
1
1
m · v 2 − m · v02 =
2
2
v02
=2
Z
~r
F~ d~r
~r0
Z
~
r
F~ d~r
~r0
Denominando Trabajo mecánico a:
W =
Z
~r
F~ d~r
~r0
Nos quedará:
∆T = W
(5.6)
Expresión que determina el teorema de la energı́a cinética, el cual lo enunciamos diciendo
que el incremento que experimenta la energı́a cinética de una partı́cula es igual al trabajo
mecánico producido por las fuerzas que actúan sobre la misma.
Dada la naturaleza de la energı́a y del trabajo, se dice que éste es un teorema escalar, en
tanto que los otros dos vistos con anterioridad, el del momento lineal y el del momento
CAPÍTULO 5. DINÁMICA
184
angular, son teoremas vectoriales.
Conservación de la energı́a
Consideremos una partı́cula material sometida a una fuerza F~ definida por la posición de
dicha partı́cula en el espacio. Tal distribución de la fuerza se denomina campo de fuerzas.
Si el trabajo realizado por la fuerza F~ , cuando la partı́cula se mueve por un determinado
camino, depende sólo de las posiciones inicial y final, y no del camino recorrido, diremos
que la fuerza F~ , o más propiamente, el campo de fuerzas, es conservativo.
Si el campo de fuerzas es conservativo, y N es una posición de referencia, diremos que
la energı́a potencial en un determinado punto del espacio P es el trabajo realizado por las
fuerzas del campo F~ cuando la partı́cula se desplaza desde P hasta la posición de referencia
N . Denominando VP a la energı́a potencial en el punto P :
Z N
VP =
F~ d~r ( Trabajo realizado a lo largo de cualquier camino )
P
Cuando la partı́cula se desplaza en un campo conservativo, por cualquier camino, desde
el punto P1 al punto P2 :
Z P2
Z N
Z P2
Z N
Z N
~
~
~
~
F d~r =
F d~r +
F d~r =
F d~r −
F~ d~r = VP1 − VP2
P1
P1
N
P1
P2
Es decir: si el campo de fuerzas es conservativo, el trabajo realizado por el mismo, al actuar sobre una partı́cula que por un camino cualquiera se desplaza desde el punto P 1 al punto
P2 , es igual a la diferencia de los valores de la energı́a potencial entre esos puntos.
Si en el punto P1 la velocidad de la partı́cula es ~v1 , y en el punto P2 la velocidad de la
partı́cula es ~v2 , aplicando el teorema de la energı́a cinética podremos decir:
Z P2
1
1
2
2
m v2 − m v1 = ∆T =
F~ d~r = VP1 − VP2
2
2
P1
1
1
m v22 + VP2 = m v12 + VP1
2
2
Esto es:
1
m v 2 + V = Kte.
2
Resultado que podremos expresar diciendo: Cuando una partı́cula se mueve en un campo
de fuerzas conservativo, la suma en todo momento de la energı́a cinética y de la energı́a potencial es constante.
Hay que tener en cuenta que no todas las fuerzas son conservativas. Las fuerzas de rozamiento por ejemplo, no lo son, y la energı́a mecánica ( 12 m v 2 + V ) no permanece constante
CAPÍTULO 5. DINÁMICA
185
cuando el movimiento es retardado por una fricción, pues en tal caso parte de la energı́a se
disipa en forma de calor.
En tal caso hay que recurrir a una ley mucho más amplia, cual es la de la conservaci ón
universal de la energı́a. Suponiendo que en el recorrido de la partı́cula desde el punto P 1
al punto P2 se produce por efecto del rozamiento una cantidad de calor Q expresada en
unidades de energı́a mecánica, lo que se verificará es:
1
1
m v12 + VP1 = m v22 + VP2 + Q
2
2
CAPÍTULO 5. DINÁMICA
186
5.8. Dinámica del movimiento relativo de la partı́cula
Todo lo planteado hasta el presente sobre la dinámica de la partı́cula está basado en la ley
fundamental de la dinámica, la cual está expresada en un sistema referencial que denominaremos inercial.
Veamos cuál es el planteamiento cuando el sistema al que referimos la posición de la partı́cula no es inmóvil.
Tenemos una partı́cula material de masa m sobre la que están aplicadas una serie de fuerzas
F~1 , F~2 , . . . , F~i , . . . , F~n . Examinaremos el movimiento que estas fuerzas originan a la partı́cula respecto de un sistema referencial 0XY Z, el cual se mueve con respecto de otra referencia
01 X1 Y1 Z1 fija, o más propiamente dicho, inercial.
Como ya deducimos en la cinemática del punto:
~aabs = ~as + ~arel + ~acor
En donde:
~acor = 2 w
~ ∧ ~vrel
Multiplicando en ambos términos de la expresión por la masa de la partı́cula m:
m · ~aabs = m · ~as + m · ~arel + m · ~acor
La ley de la dinámica para el movimiento de la partı́cula en una referencia inercial, nos
dice:
m · ~aabs =
i=n
X
F~i
i=1
Por tanto:
i=n
X
F~i = m · ~as + m · ~arel + m · ~acor
i=1
Despejando en esta ecuación el término correspondiente a la ~a rel que es el que nos interesa,
pues es con esta aceleración con la que verı́amos moverse a la partı́cula desde la referencia
móvil 0XY Z:
m · ~arel =
i=n
X
F~i − m · ~as − m · ~acor
i=1
En donde:
i=n
X
F~i = F~
Resultante de las fuerzas activas que actúan sobre la partı́cula.
i=1
F~iner.arr. = −m · ~as
Fuerza de inercia de arrastre.
CAPÍTULO 5. DINÁMICA
F~iner.cor. = −m · ~acor
187
Fuerza de inercia de Coriolis.
Nos quedará por tanto:
m · ~arel =
i=n
X
F~i + F~iner.arr. + F~iner.cor.
(5.7)
i=1
Esta ecuación expresa entonces la ley fundamental de la dinámica para el movimiento relativo, en la cual como se observa se ha tenido que añadir a la resultante de las fuerzas activas
que que actúan sobre la partı́cula, dos nuevas fuerzas que denominamos de inercia, la fuerza
de inercia de arrastre, y la fuerza de inercia de Coriolis, las cuales tienen en cuenta la influencia del movimiento de la referencia móvil sobre el movimiento relativo de la partı́cula.
Pasemos ahora a analizar algunos casos particulares:
1. Caso en que no exista la fuerza de inercia de Coriolis.
F~iner.cor. = −m · ~acor = −2 · m · w
~ ∧ ~vrel
Para que esta fuerza se anule se debe cumplir una de estas condiciones:
a) Que w
~ = ~0, lo que indicarı́a que el movimiento de arrastre de los ejes móviles es
de traslación.
b) Que ~vrel = ~0, es decir, que en ese instante la velocidad relativa se anule.
c) Que w
~ y ~vrel sean vectores colineales.
En cualquiera de estos casos, la ley de la dinámica quedará expresada como:
F~ + F~iner.arr. = m · ~arel
2. Caso de que no existan fuerzas de inercia ni de arrastre ni de Coriolis.
Para que tampoco exista la fuerza de inercia de arrastre se exigirá que ~a s = ~0, lo cual
implicará que el movimiento del sistema referencial móvil deberá ser de traslación rectilı́nea y uniforme. En ese caso la ecuación de la dinámica para el movimiento relativo
será:
F~ = m · ~arel
La cual coincide plenamente con la ya enunciada ley fundamental de la dinámica.
Es por esto que los sistemas referenciales con movimiento de traslación rectilı́nea
y uniforme con respecto a referencias inerciales, son también inerciales. En ellos se
cumplen las leyes de la dinámica sin necesidad de tener que introducir fuerzas complementarias, y no es posible distinguir desde ellos su situación de movimiento.
CAPÍTULO 5. DINÁMICA
188
5.9. Dinámica del sistema
5.9.1. Concepto de sistema mecánico. Fuerzas internas y externas
Se denomina sistema mecánico a un conjunto de puntos materiales vinculados entre sı́, en el
cual, la posición y movimiento de cada punto material, condiciona la posición y movimiento
de todos los demás.
Ası́, ante esta definición tan amplia, un sistema mecánico tanto podrá ser, el sistema solar, un mecanismo, o un sólido rı́gido.
Las fuerzas que actúan sobre cada punto del sistema material, podrán ser como ya sabemos, internas o externas, según provengan de puntos pertenecientes al sistema, o ajenos a él.
Las fuerzas internas de un sistema mecánico presentan estas dos propiedades:
1. La resultante de todas las fuerzas internas es nula.
En efecto, según la tercera ley de la dinámica, si consideramos dos puntos cualesquiera
int
int
pertenecientes a un mismo sistema mecánico, las fuerzas interiores F~12
y F~21
con que
ambas partı́culas interaccionan entre sı́, son vectores opuestos, y su suma considerados
como vectores libres, será nula:
int
int
F~12
+ F~21
= ~0
Como para cada par de puntos pertenecientes al sistema se obtendrá el mismo resultado, extendiendo la suma para todo el sistema se tendrá:
i=n
X
F~iint = ~0
i=1
2. La suma de los momentos de todas las fuerza internas respecto de un punto arbitrario
0 es nula.
Determinemos el momento que con respecto al punto 0 originan las fuerzas internas
int
int
F~12
y F~21
que actúan sobre las partı́culas 1 y 2: ( Ver Figura 5.6 )
2
F int 21
r2
F int 12
1
r1
0
Figura 5.6: Momento con respecto de 0 de las fuerzas internas que actúan sobre dos puntos
CAPÍTULO 5. DINÁMICA
189
~ 0 (F~ int ) + M
~ 0 (F~ int ) = ~r1 ∧ F~ int + ~r2 ∧ F~ int = ~r1 ∧ F~ int − ~r2 ∧ F~ int =
M
12
21
12
21
12
12
→
−
int
int
= (~r1 − ~r2 ) ∧ F~12
= 21 ∧ F~12
= ~0
Extendiendo la suma a todas las posibles parejas de puntos del sistema material:
i=n
X
~ 0 (F~ int ) = ~0
M
i
i=1
Sin embargo, de estas dos propiedades, resultante de las fuerza internas igual cero, y momento resultante de las fuerzas internas respecto de un punto 0 igual a cero, no se deduce que
las fuerzas internas se equilibren en tal forma que no sean capaces de producir movimientos en los puntos del sistema material, ya que se encuentran aplicadas en puntos distintos,
y pueden provocar desplazamientos mútuos entre éstos. Las fuerzas internas sólo generarán
una situación de equilibrio en un sistema material muy concreto, el denominado s ólido rı́gido
indeformable.
5.9.2. Ecuaciones diferenciales del movimiento del sistema
Sean m1 , m2 , . . . , mi , . . . , mn las masas de las n partı́culas materiales que componen un
determinado sistema mecánico. Sobre cada una de estas partı́culas materiales actuarán las
fuerzas F~iext y las fuerzas internas F~iint . Para cada una de estas partı́culas será aplicable la
ecuación fundamental de la dinámica del punto:
m1 · ~a1 = F~1ext + F~1int
F~2ext + F~2int
..
.
ext
~
Fi + F~iint
..
.
ext
= F~n + F~nint
m2 · ~a2 =
..
..
.
.
mi · ~ai =
..
..
.
.
mn · ~an
Estas ecuaciones que permiten determinar la ley del movimiento de cada partı́cula del sistema, se denominan ecuaciones diferenciales del movimiento del sistema.
Son diferenciales ya que ~ai =
d2~ri
dt2
Proyectándolas sobre los ejes del sistema de referencia obtendrı́amos su correspondiente
escalarización.
Se podrı́a pensar que ya está resuelto el problema de la dinámica del sistema, pero en la
práctica esto no es ası́ por las siguientes razones:
CAPÍTULO 5. DINÁMICA
190
1. Por encontrarnos en la resolución del sistema de ecuaciones diferenciales con dificultades matemáticas difı́cilmente superables.
2. Por la difı́cil determinación en cada caso de las magnitudes que intervienen en ellas,
concretamente, de las fuerzas internas.
El papel más importante de estas ecuaciones es ser la base para la obtención de los teoremas
fundamentales de la dinámica del sistema, que veremos a continuación.
5.9.3. Teorema del movimiento del centro de masas
Recordemos que tal y como habı́amos visto en la geometrı́a de masas, la localización del
centro de masas G de un sistema material viene dada por:
~rG =
i=n
X
mi · ~ri
i=1
i=n
X
=
i=n
X
mi · ~ri
i=1
M
mi
i=1
En donde M es evidentemente, la masa total del sistema. Despejando en la ecuación anterior:
i=n
X
mi · ~ri = M · ~rG
i=1
Calculamos las derivadas segundas de los dos miembros de esta expresión, recordando que
la derivada de la suma es igual a la suma de las derivadas:
i=n
X
i=1
d2~rG
d2~ri
mi · 2 = M ·
dt
dt2
=⇒
i=n
X
mi · ~ai = M · ~aG
i=1
En donde ~aG es la aceleración del centro de masas del sistema.
El primer miembro de la expresión anterior podrá ser obtenido sin más que sumar todo el
conjunto de las ecuaciones diferenciales del movimiento del sistema expresadas en el apartado anterior 5.9.2.
i=n
X
mi · ~ai =
i=1
i=n
X
i=1
F~iext +
i=n
X
F~iint
i=1
Recordando la primera propiedad de las fuerzas internas del sistema material expuesta en
el apartado 5.9.1.
i=n
X
i=1
F~iint = ~0
CAPÍTULO 5. DINÁMICA
191
Con lo que nos quedará:
i=n
X
i=1
mi · ~ai =
i=n
X
F~iext
i=1
Y teniendo en cuenta lo ya visto:
M · ~aG =
i=n
X
F~iext
(5.8)
i=1
Ecuación que expresa el teorema del movimiento del centro de masas, el cual podrı́a enunciarse como sigue:
El producto de la masa total del sistema material por la aceleración de su centro de masas es
igual a la suma de todas las fuerzas externas que actúan sobre dicho sistema.
Observemos que la ecuación deducida coincide formalmente con la ley fundamental de la
dinámica para el punto material. En virtud de ello podrı́amos dar este otro enunciado del
teorema:
El centro de masas de un sistema se mueve como un punto material en el que se encuentra concentrada la totalidad de la masa del sistema, y al que se le estan aplicando todas las
fuerzas externas que actúan sobre el sistema.
Proyectando sobre los ejes de referencia obtendrı́amos:
i=n
d2 xG X ext
=
F ix
M
·
dt2
i=1
i=n
d2 yG X ext
M·
=
F iy
dt2
i=1
i=n
d2 zG X ext
F iz
M · dt2 =
i=1
Estas últimas ecuaciones representan las ecuaciones diferenciales del movimiento del centro
de masas de un sistema en su forma escalar.
Si se supiese a priori que el movimiento del sistema es de traslación, este teorema habrı́a
resuelto completamente el problema dinámico.
En cualquier caso el teorema permite determinar el movimiento del centro de masas del
sistema, sin tener en cuenta las fuerzas internas, que en principio, nos son desconocidas. En
esto reside su valor práctico.
CAPÍTULO 5. DINÁMICA
192
Ley de conservación del movimiento del centro de masas
En base al teorema anterior se pueden obtener estas conclusiones:
1. Supongamos que la suma de las fuerzas externas que actúan sobre el sistema es nula:
i=n
X
F~iext = ~0
=⇒
M · ~aG = ~0
=⇒
~aG = ~0
=⇒
~
~vG = Kte
i=1
Si la suma de las fuerzas externas que actúan sobre un sistema material es nula, su
centro de masas se moverá con velocidad constante, es decir, con un movimiento rectilı́neo y uniforme. En particular, si inicialmente el centro de masas se encontraba
en reposo, seguirá permaneciendo en reposo. Como se ve, la acción exclusiva de las
fuerzas internas no puede alterar el movimiento del centro de masas del sistema.
2. Supongamos ahora, que la suma de las fuerzas externas que que actúan sobre un sistema no es nula, pero que sı́ lo es su proyección sobre un eje de referencia cualquiera,
el eje X por ejemplo. En ese caso:
i=n
X
Fiext
=0
x
=⇒
M·
i=1
d 2 xG
=0
dt2
=⇒
dxG
= vGx = Kte
dt
Entonces la proyección de la velocidad del centro de masas del sistema sobre ese eje
sı́ es constante. En particular, si inicialmente vGx = 0, en todo instante vGx seguirá siendo nulo, es decir, el centro de masas no se desplazará a lo largo de ese eje.
5.9.4. Momento lineal o cantidad de movimiento de un sistema
Definimos momento lineal o cantidad de movimiento de un sistema a la magnitud vectorial P~
que es la suma de los momentos lineales p~i = mi ·~vi de todas las partı́culas que lo componen.
P~ =
i=n
X
mi · ~vi
i=1
Recordando la expresión de la localización del centro de masas de un sistema material:
i=n
X
mi · ~ri = M · ~rG
i=1
Y derivándola una vez con respecto del tiempo:
i=n
X
i=1
mi ·
d~ri
d~rG
=M·
dt
dt
=⇒
i=n
X
mi · ~vi = M · ~vG
=⇒
P~ = M · ~vG
i=1
Es decir: la cantidad de movimiento o momento lineal de un sistema es igual al producto
de la masa total del sistema por la velocidad de su centro de masas.
CAPÍTULO 5. DINÁMICA
193
De ello se deduce que si un sistema se mueve en tal forma que su centro de masas permanece inmóvil, el momento lineal del sistema es nulo.
Por tanto, el momento lineal P~ de un sistema caracteriza el movimiento de su centro de
masas, pero no una posible rotación del sistema alrededor del mismo.
5.9.5. Teorema de la variación de la cantidad de movimiento de un sistema
Sea un sistema compuesto por n partı́culas materiales. Planteamos el conjunto de las n ecuaciones diferenciales del movimiento expresadas en el apartado 5.9.2, y las sumamos:
i=n
X
mi · ~ai =
i=n
X
F~iext +
i=1
i=1
i=n
X
F~iint
i=1
Recordando que tal y como vimos en el apartado 5.9.1 la suma de las fuerzas internas extendida a la totalidad del sistema es nula, nos quedará:
i=n
X
mi · ~ai =
i=1
i=n
X
F~iext
i=1
Supuesta la masa de cada una de las partı́culas del sistema como constante, y teniendo en
cuenta que la derivada de la suma es igual a la suma de las derivadas, podremos expresar:
i=n
X
i=1
d
mi · ~ai =
i=n
X
mi · ~vi
i=1
dt
=
dP~
dt
Con lo que nos quedará:
i=n
X
dP~
=
F~iext
dt
i=1
(5.9)
Lo que podrı́a expresarse como: La derivada del momento lineal de un sistema material con
respecto del tiempo es igual a la suma de todas las fuerzas externas que actúan sobre dicho
sistema.
Proyectando sobre los ejes de referencia tendrı́amos:
CAPÍTULO 5. DINÁMICA
194
i=n
X
dPx
Fiext
=
x
dt
i=1
i=n
X
dPy
Fiext
=
y
dt
i=1
i=n
X
dPz
Fiext
=
z
dt
i=1
La forma integral de este teorema se obtendrá de la siguiente forma:
i=n
X
F~iext · dt = dP~
i=1
~2
P
Z
~1
P
dP~ =
Z
i=n
t2 X
t1
i=1
F~iext · dt
=⇒
P~2 − P~1 =
i=n Z
X
i=1
t2
F~iext · dt =
t1
i=n
X
~iext
S
i=1
Lo que podrá ser expresado de la siguiente forma: La variación del momento lineal que
experimenta un sistema entre los instantes de tiempo t1 y t2 es igual a la suma de los impulsos que las fuerzas externas que actúan sobre el sistema producen durante ese intervalo de
tiempo.
Esta expresión vectorial, también podrá ser escalarizada al proyectarla sobre los ejes de referencia:
i=n
X
P2 x − P 1 x =
Siext
x
i=1
i=n
X
P2 y − P 1 y =
Siext
y
i=1
i=n
X
P2 z − P 1 z =
Siext
z
i=1
El teorema de la variación de la cantidad de movimiento y el teorema del movimiento del
centro de masas del sistema son prácticamente el mismo. En efecto:
i=n
X
dP~
Teorema de la cantidad de movimiento:
=
F~iext
dt
i=1
Teorema del movimiento del centro de masas: M · ~aG =
i=n
X
i=1
F~iext
CAPÍTULO 5. DINÁMICA
195
Ya que como sabemos P~ = M · ~vG , bastará con substituir en la primera expresión para
obtener la segunda.
Ley de la conservación de la cantidad de movimiento
En base al teorema anterior se pueden obtener las siguientes conclusiones:
1. Supongamos que la suma de las fuerzas externas que actúan sobre el sistema es nula:
i=n
X
F~iext = ~0
=⇒
i=1
dP~ ~
=0
dt
=⇒
~
P~ = Kte.
En este caso el vector cantidad de movimiento permanece constante.
2. Supongamos que la suma de las fuerzas externas aplicadas sobre el sistema material
no es nula, pero sı́ lo es su proyección sobre un eje cualquiera, por ejemplo sobre el
eje X de referencia. En ese caso:
i=n
X
Fiext
=0
x
i=1
=⇒
dPx
=0
dt
=⇒
Px = Kte.
En virtud de estos aspectos de la ley de la conservación de la cantidad de movimiento se
deduce que con las fuerzas internas no es posible modificar el momento lineal o cantidad de
movimiento de un sistema.
5.9.6. Momento angular o cinético de un sistema ( Sólido rı́gido )
Consideremos un sistema material de masa total M , y cuyo centro de masas está localizado
en el punto G. El sistema de referencia utilizado es fijo, o más propiamente en dinámica,
inercial. ( Ver Figura 5.7 )
El momento cinético de una de las partı́culas mi que componen el sistema con respecto a
un punto cualquiera P de dicho sistema será:
~ P = ~ri ∧ mi · ~vi
L
i
Si el sistema fuese indeformable, la velocidad ~vi de la partı́cula de masa mi puede ser relacionada con la velocidad del punto P , ~vP , mediante la relación cinemática:
~vi = ~vP + w
~ ∧ ~ri
Con lo que sustituyendo en la expresión del momento cinético para la partı́cula de masa
mi tendremos:
~ P = ~ri ∧ mi · (~vP + w
L
~ ∧ ~ri ) = (~ri · mi ) ∧ ~vP + ~ri ∧ (w
~ ∧ ~ri ) · mi
i
CAPÍTULO 5. DINÁMICA
196
Z
w
G
r 'i
rG
mi
ri
P
Y
X
Figura 5.7: Determinación del momento angular de un sistema con respecto al punto P
El momento angular o cinético de todo el sistema con respecto del punto P será la suma
de los momentos angulares con respecto de dicho punto de las n partı́culas que componen el
sistema. Es decir:
~P =
L
i=n
X
i=1
i=n X
~ri · mi ∧ ~vP +
~ri ∧ (w
~ ∧ ~ri ) · mi
i=1
Suponemos ahora, que el sistema material además de indeformable es continuo, es decir,
lo que denominamos un sólido rı́gido. En este caso, en la expresión anterior los sumatorios
pasarán a ser integrales, y los valores de las masas discretas mi pasarán a ser valores diferenciales dm. Esto es:
Z
Z
~
LP =
~r · dm ∧ ~vP + ~r ∧ (w
~ ∧ ~r) · dm
Hacemos ahora las siguientes consideraciones según ciertas caracterı́sticas del punto P :
1. Supongamos que el punto P del sistema material es un punto fijo y por tanto con velocidad nula, que denominaremos 0. En este caso:
~vP = ~v0 = ~0
Y el momento angular o cinético con respecto a ese punto será:
Z
~ 0 = ~r ∧ (w
L
~ ∧ ~r) · dm
En donde ~r representa a los vectores de posición que con origen en 0 localizan a los
puntos genéricos del sistema material.
2. Supongamos ahora que el punto P coincide con el centro de masas del sistema G.
CAPÍTULO 5. DINÁMICA
197
En este caso losR vectores de posición ~r al tener como origen el punto G los denominaremos ~r 0 y ~r 0 · dm = ~0 ya que la localización del centro de masas a partir del
propio centro de masas G tiene que ser ~0. El momento angular o cinético con respecto
al centro de masas será:
Z
~
LG = ~r 0 ∧ (w
~ ∧ ~r 0 ) · dm
En donde los vectores de posición ~r 0 , como ya hemos dicho, están trazados desde
el centro de masas G.
3. Por último, pensemos que el punto P es un punto cualquiera del sistema material.
Podemos expresar que: ( Ver Figura 5.7 )
~r = ~rG + ~r 0
Y sustituyendo en la expresión general del momento angular del sistema sólido rı́gido
con respecto al punto P :
Z
Z
0
0
0
~
LP = (~rG + ~r ) · dm ∧ ~vP + (~rG + ~r ) ∧ w
~ ∧ (~rG + ~r ) · dm
Y desarrollando:
Z
Z
Z
0
~
LP =
~r · dm ∧ ~vP + (~rG ∧ ~vP ) dm + ~r 0 ∧ (w
~ ∧ ~r 0 ) · dm +
Z
Z
Z
0
0
+
~r · dm ∧ (w
~ ∧ ~rG ) + ~rG ∧ w
~ ∧ ~r · dm + ~rG ∧ (w
~ ∧ ~rG ) · dm
expresión, los sumandos primero, cuarto, y quinto son nulos, por contener
REn esta
0
~ri · dm , que como hemos visto es ~0.
El cuarto sumando:
R
~G
~r 0 ∧ (w
~ ∧ ~r 0 ) · dm = L
Tal y como hemos determinado en el supuesto anterior.
R
Teniendo en cuenta que dm = M , masa total del sistema, la expresión del momento angular del sistema con respecto al punto P nos quedará:
~ P = (~rG ∧ ~vP ) · M + L
~ G + ~rG ∧ (w
~G
L
~ ∧ ~rG ) · M = ~rG ∧ (~vP + w
~ ∧ ~rG ) · M + L
Y como sabemos por la cinemática del sólido rı́gido que ~vG = ~vP + w
~ ∧ ~rG :
~ P = (~rG ∧ ~vG ) · M + L
~G
L
CAPÍTULO 5. DINÁMICA
198
En definitiva, el momento angular de un sólido rı́gido con respecto a un punto P del
mismo será:
~ P = ~rG ∧ M · ~vG + L
~G
L
La expresión obtenida es el denominado teorema de Koenig para el momento angular
o cinético, que se podrá enunciar ası́:
El momento cinético de un sistema material sólido rı́gido con respecto a un cierto
punto P del mismo, es igual al momento cinético del centro de masas, supuesto que
en él se encuentra concentrada toda la masa del sistema, con respecto a P , más el
momento cinético del sistema con respecto del centro de masas.
5.9.7. Momento angular o cinético de un sistema sólido rı́gido expresado en función del tensor de inercia
Como hemos visto, el momento angular o cinético de un sistema sólido rı́gido, sea con respecto a un punto fijo 0, o sea con respecto al centro de masas del sistema G, adopta la forma:
Z
~
L = ~r ∧ (w
~ ∧ ~r) · dm
En donde los vectores ~r marcan la posición de los puntos genéricos del sistema, teniendo
como origen el punto fijo del sistema 0, o el centro de masas del sistema G, según sea el
caso. La integral está extendida al entorno del sistema material.
Desarrollando el contenido de la integral:
h
i
~r ∧ (w
~ ∧ ~r) = (~r · ~r) · w
~ − ~r · (~r · w)
~ = r2 · w
~ − {~r · ~r} · w
~ = r 2 {δ} − {~r · ~r} · w
~
En donde :
r 2 = (~r · ~r) : Cuadrado del módulo del vector ~r
{~r · ~r} : Operador diádico de los vectores ~r y ~r
{δ} : Operador δ de Kronecker
Por tanto, la expresión del momento angular o cinético será:
Z h
i
~
L=
r 2 {δ} − {~r · ~r} dm · w
~ = {I} · w
~
Ya que como vimos en el Capı́tulo 2, Geometrı́a de masas, el tensor de inercia en un punto
resultaba ser :
Z h
i
{I} =
r 2 {δ} − {~r · ~r} dm
Siendo el punto en el que se encuentra definido el tensor {I} el punto desde el que están
CAPÍTULO 5. DINÁMICA
199
trazados los vectores de posición ~r. En nuestro caso, dicho punto puede ser un punto fijo 0
del sistema, o el centro de masas del mismo G.
~ = {I} · w
De la expresión obtenida para el momento angular o cinético L
~ se deduce que en
~
general el momento angular L y el vector velocidad angular de rotación w
~ no son colineales.
En efecto:
Lx
Ixx Ixy Ixz
wx
Ly = Iyx Iyy Iyz · wy
Lz
Izx Izy Izz
wz
~ yw
Según esta transformación, nada nos hace pensar que los vectores L
~ tengan sus componentes proporcionales, y que por tanto sean colineales.
Como ya sabemos por lo visto en el Capı́tulo 2, Geometrı́a de masas, si el sistema referencial fuese el de las direcciones principales del sistema, la matriz asociada al tensor de
inercia adoptarı́a la forma:
Iε 0 0
0 Iη 0
0 0 Iρ
En donde Iε , Iη e Iρ son los denominados momentos de inercia principales.
Si el vector rotación w
~ estuviese dirigido según una de las direcciones principales, por ejemplo la ε, su expresión en esta referencia serı́a w
~ = wε · ~uε . En este caso el momento angular
será:
Lε
Iε 0 0
wε
Iε · wε
Lη = 0 I η 0 · 0 = 0
Lρ
0 0 Iρ
0
0
Y las componentes de este vector momento angular en la referencia principal serán:
Lε = I ε · w ε
;
Lη = 0
;
Lρ = 0
~ son colineales, y podrı́amos expresar:
En esta circunstancia, los vectores w
~ yL
~ = Iε · w
L
~
En donde Iε es un escalar que resulta ser el momento de inercia axial del sistema con respecto del eje ε, que como hemos indicado, es principal.
CAPÍTULO 5. DINÁMICA
200
5.9.8. Teorema de la variación del momento cinético de un sistema material con respecto a un punto en movimiento
Consideramos ahora un sistema un sistema material compuesto por n partı́culas materiales,
siendo la masa genérica de cada una de ellas mi , y trataremos de expresar su momento
cinético con respecto de un punto P que en principio no pertenece al sistema, y que se encuentra animado de una velocidad ~vP . ( Ver Figura 5.8 ) El momento angular o cinético del
vi
mi
ri
vP
P
Figura 5.8: Momento angular de un sistema compuesto por partı́culas m i con respecto al
punto en movimiento P
sistema con respecto del punto P , será evidentemente, la suma de los momentos angulares
de todas las partı́culas que componen el sistema con respecto a dicho punto:
~P =
L
i=n
X
~ri ∧ mi · ~vi
i=1
Derivando esta expresión con respecto el tiempo:
!
i=n
X
~P
dL
d~ri
d(mi · ~vi )
=
∧ mi · ~vi + ~ri ∧
dt
dt
dt
i=1
Teniendo en cuenta la relación que podemos establecer entre la velocidad ~v i de una de las
partı́culas genéricas del sistema de masa mi , y la velocidad ~vP del punto P :
~vi = ~vP +
d~ri
dt
=⇒
d~ri
= ~vi − ~vP
dt
Y como por otra parte, a las partı́culas genéricas de masa mi les podremos aplicar el teorema de la variación del momento lineal expresado en la ecuación (5.4):
d(mi · ~vi )
= F~iext + F~iint
dt
Sustituyendo en la derivada del momento angular del sistema:
i=n
i=n
i Xh
i
Xh
~P
dL
ext
int
~
~
=
(~vi − ~vP ) ∧ mi · ~vi +
~ri ∧ (Fi + Fi )
dt
i=1
i=1
CAPÍTULO 5. DINÁMICA
201
En esta ecuación:
~vi ∧ mi · ~vi = ~0
Por ser vectores colineales.
i=n X
~ri ∧ F~iint = ~0 Segunda propiedad de las fuerzas interiores.
i=1
Por tanto nos quedará:
i=n
i=n
X
X
~P
dL
ext
~
= −~vP ∧
mi · ~vi ) +
~ri ∧ Fi
dt
i=1
i=1
~P
dL
~ P (F~ ext ) + P~ ∧ ~vP
=M
(5.10)
dt
La derivada con respecto al tiempo del momento angular o cinético de un sistema material
con respecto de un punto P en movimiento, es igual al momento resultante de las fuerzas
exteriores que actúan sobre el sistema con respecto de dicho punto P , más el producto vectorial del momento lineal del sistema por la velocidad del punto P .
Este es el teorema de la variación del momento angular para el sistema material en su versión
más general. Para los casos particulares que veremos a continuación, adopta una formulación
más sencilla, y formalmente coincidente con la expresión del mismo teorema para la partı́cula material.
1. Supongamos que el punto P es un punto fijo, y por tanto con velocidad nula, al que
denominaremos 0. En ese caso ~vP = ~v0 = ~0. Teniendo esto en cuenta en la ecuación
(5.10) nos quedará:
~0
dL
~ 0 (F~ ext )
=M
dt
2. Supongamos que el punto P es precisamente el centro de masas G del sistema material,
y por tanto ~vP = ~vG . Entonces el vector momento lineal del sistema P~ = M · ~vG y
el vector ~vP = ~vG son colineales y su producto vectorial será nulo. Teniendo esto en
cuenta en la ecuación (5.10) nos quedará:
~G
dL
~ G (F~ ext )
=M
dt
Por tanto, la derivada con respecto al tiempo del momento angular o cinético de un sistema
material con respecto del centro de masas G, o con respecto a un punto fijo 0 será igual
al momento resultante de las fuerzas exteriores que actúan sobre el sistema con respecto al
punto considerado.
Consideramos ahora un sistema referencial con origen en el punto P , cuyos ejes de referencia se mueven permanentemente paralelos a si mismos. Por otra parte, suponemos que
CAPÍTULO 5. DINÁMICA
202
el sistema referencial con origen en O es fijo, o más propiamente dicho en dinámica, inercial.
mi
~r 0i
~ri
O
~rP
G
~rG
P
Situados ahora en el sistema referencial con origen en P , dicho punto se nos aparece como
fijo, con lo que podemos expresar:
~P
dL
~ P (F~ ext + F~ in )
= M
dt
Como este sistema no es inercial, hemos tenido que incluir además de las fuerzas exteriores,
la fuerzas de inercia. En este caso se trata exclusivamente de fuerzas de inercia de arrastre,
dado que como hemos indicado, los ejes móviles se mueven paralelos a si mismos, y por
tanto en traslación.
La fuerza de inercia que actuará sobre cada partı́cula mi del sistema será entonces:
F~iin = F~iins = − mi ~aP
Y el teorema del momento angular en el punto P , se expresará:
~P
dL
~ P (F~ ext ) − Σ ~r 0 ∧ mi ~aP = M
~ P (F~ ext ) − Σ (~ri − ~rP ) ∧ mi ~aP
= M
i
dt
~P
dL
~ P (F~ ext ) − Σ ~ri ∧ mi ~aP + Σ ~rP ∧ mi ~aP
= M
dt
El término Σ ~ri ∧ mi ~aP expresa el momento resultante respecto al punto O, de un sistema
de vectores paralelos mi ~aP . Dicho sistema cumplirá el teorema de Varignon, por lo que ese
momento resultante, será el momento de su resultante, Σ mi ~aP = M ~aP , supuesta como
vector deslizante cuya lı́nea de acción es el eje central, que pasa por el punto central G, con
respecto a O. Podremos expresar entonces:
Σ ~ri ∧ mi ~aP = ~rG ∧ M ~aP
CAPÍTULO 5. DINÁMICA
203
El otro término, Σ ~rP ∧ mi ~aP , será:
Σ ~rP ∧ mi ~aP = ~rP ∧ Σ mi ~aP = ~rP ∧ M ~aP
Por tanto:
~P
dL
~ P (F~ ext ) − ~rG ∧ M ~aP + ~rP ∧ M ~aP
= M
dt
~P
dL
~ P (F~ ext ) + ( ~rP − ~rG ) ∧ M ~aP
= ΣM
dt
El término ( ~rP − ~rG ) ∧ M ~aP , se anulará en alguna de las siguientes circunstancias:
⇒
~rP − ~rG = ~0
B
Si P ≡ G
B
Si ~aP = ~0
B
−→
Si los vectores ~aP y ( ~rP − ~rG ) = GP , son colineales.
En resumen, el teorema del momento angular o cinético para el sistema material, se puede
aplicar en un punto P , sin la presencia de ningún término complementario o corrector, en la
forma:
~P
dL
~ P (F~ ext )
= ΣM
dt
Si el punto P , es el centro de masas del sistema G.
Si el punto P es un punto fijo.
Si el punto P , tiene su aceleración nula, o dirigida hacia el centro de masas del sistema G.
Ley de la conservación del momento cinético
Suponiendo que la suma de los momentos de todas las fuerzas externas aplicadas sobre
un sistema material respecto de un punto fijo 0 es cero:
~0
dL
~ 0 (F~ ext ) = ~0
~ 0 = Kte
~
M
=⇒
= ~0
=⇒
L
dt
Suponiendo que la suma de los momentos de todas las fuerzas externas aplicadas sobre
un sistema material respecto del centro de masas G es cero:
~G
dL
~ G (F~ ext ) = ~0
~ G = Kte
~
M
=⇒
= ~0
=⇒
L
dt
Suponiendo que la suma de los momentos de todas las fuerzas externas aplicadas sobre
un sistema material respecto de un eje ε es cero:
dLε
Mε (F~ ext ) = 0
=⇒
=0
=⇒
Lε = Kte
dt
CAPÍTULO 5. DINÁMICA
204
5.9.9. Energı́a cinética de un sistema sólido rı́gido
Consideremos un sistema material de masa total M , y cuyo centro de masas está localizado
en el punto G.
La energı́a cinética de una de las partı́culas mi que lo componen será:
Ti =
1
1
mi · vi2 = mi · (~vi · ~vi )
2
2
Si el sistema fuese indeformable, la velocidad ~vi de la partı́cula de masa mi puede ser relacionada con la velocidad del punto P , ~vP , mediante la relación cinemática:
Z
w
G
mi
ri
P
Y
X
Figura 5.9: Determinación de la energı́a cinética de un sistema en base al punto P
~vi = ~vP + w
~ ∧ ~ri
Con lo que sustituyendo en la expresión de la energı́a cinética para la partı́cula de masa
mi tendremos:
Ti =
1
1
mi · vi2 = mi · (~vP + w
~ ∧ ~ri ) · (~vP + w
~ ∧ ~ri )
2
2
Y desarrollando:
Ti =
1
1
mi · (~vP · ~vP ) + ~vP · (w
~ ∧ ~ri ) · mi + (w
~ ∧ ~ri ) · (w
~ ∧ ~ri ) · mi
2
2
La energı́a cinética para la totalidad del sistema será la suma de las energı́as cinéticas de
las partı́culas que lo componen:
CAPÍTULO 5. DINÁMICA
205
i=n
i=n
i=n h
1X
i
X
X
1
T = (~vP · ~vP ) ·
mi + ~vP · w
~∧
~ri · mi +
(w
~ ∧ ~ri ) · (w
~ ∧ ~ri ) · mi
2
2 i=1
i=1
i=1
Suponemos ahora, que el sistema material además de indeformable es continuo, es decir,
lo que denominamos un sólido rı́gido. En este caso, en la expresión anterior los sumatorios
pasarán a ser integrales, y los valores de las masas discretas mi pasarán a ser valores diferenciales dm. Esto es:
Z
1Z h
i
1
T = M (~vP · ~vP ) + ~vP · w
~ ∧ ~r dm +
(w
~ ∧ ~r) · (w
~ ∧ ~r) dm
2
2
El contenido de la última integral puede ser transformado:
(w
~ ∧ ~r) · (w
~ ∧ ~r) = (w
~ · ~r · w
~ ∧ ~r) = (~r · w
~ ∧ ~r · w)
~ = ~r ∧ (w
~ ∧ ~r) · w
~
|
{z
}
Producto mixto
Y por tanto:
Z
Z
1
1
~ ~r dm + · w
~ ~r ∧ (w
~ ∧ ~r)dm
T = M (~vP · ~vP ) + ~vP · w
2
2
Hagamos las siguientes consideraciones según la naturaleza del punto P :
1. Supongamos que el punto P es un punto fijo 0 perteneciente al sistema.
~vP = ~v0 = ~0
1
T = ·w
~
2
Z
~r ∧ (w
~ ∧ ~r)dm =
1
~0
·w
~ ·L
2
~ 0 en función del tensor de inercia:
Como ya conocemos la expresión de L
Ixx Ixy Ixz
wx
1
T = · wx wy wz · Iyx Iyy Iyz · wy
2
Izx Izy Izz
wz
Y desarrollando este producto de matrices:
T =
1
1
1
Ixx wx2 + Iyy wy2 + Izz wz2 + Ixy wx wy + Ixz wx wz + Iyz wy wz
2
2
2
Si la referencia empleada fuese la de las direcciones principales:
T =
1
1
1
Iε wε2 + Iη wη2 + Iρ wρ2
2
2
2
2. Supongamos ahora que el punto P es el centro de masas G del sistema.
~vP = ~vG
CAPÍTULO 5. DINÁMICA
206
R
Como los vectores de posición ~r parten ahora del centro de masas G, la intrgral ~r dm
que representa el numerador en la expresión que determina el vector de localización
del centro deRmasas será nula, ya que el vector que localiza G desde G será ~0. Por tanto
en este caso ~r dm = ~0.
La energı́a cinética del sistema será entonces:
T =
1
1
2
~G
M · vG
+ ·w
~ ·L
2
2
Ecuación que expresa el teorema de Koenig para la energı́a cinética, que podrı́amos
enunciar de la siguiente forma:
La energı́a cinética de un sistema sólido rı́gido en movimiento se determina sumando
la energı́a cinética de traslación, calculada como si toda la masa del sistema se concentrase en el centro de masas del sistema, y la energı́a cinética de rotación del sistema en
su giro alrededor del centro de masas.
En forma análoga a como se ha hecho en el caso del punto fijo, la energı́a cinética
expresada en función del tensor de inercia, en este caso en el centro de masas, será:
I
I
I
w
xx
xy
xz
x
1
1
2
wx wy wz · Iyx Iyy Iyz · wy
+
T = M · vG
2
2
Izx Izy Izz
wz
Y desarrollando el producto de matrices:
T =
1
1
1
1
2
M · vG
+ Ixx wx2 + Iyy wy2 + Izz wz2 + Ixy wx wy + Ixz wx wz + Iyz wy wz
2
2
2
2
Si la referencia empleada en la definición de la matriz asociada al tensor de inercia en
G es la de las direcciones principales:
T =
1
1
1
1
2
M · vG
+ Iε wε2 + Iη wη2 + Iρ wρ2
2
2
2
2
CAPÍTULO 5. DINÁMICA
207
5.9.10. Teorema de la variación de la energı́a cinética de un sistema
Sea un sistema material compuesto por n partı́culas, siendo mi la masa genérica de una
cualquiera de ellas. El teorema de la variación de la energı́a cinética para una de estas partı́culas que componen el sistema, en su forma diferencial será:
d(mi · vi2 )
= F~i · d~r = dWi
2
Teniendo en cuenta que las fuerzas que actúan sobre cada partı́cula del sistema pueden
provenir del exterior o del interior del mismo, distinguiremos entre el trabajo producido
por las fuerzas exteriores, y el trabajo producido por las fuerzas interiores:
d(mi · vi2 )
= dWiext + dWiint
2
Efectuando la suma para todas las partı́culas que componen el sistema:
d
i=n
X
mi ·
i=1
2
vi2
= dT = d
i=n
X
Wiext
i=1
+d
i=n
X
Wiint
i=1
Ecuación que expresa el teorema de la variación de la energı́a cinética para el sistema material en su forma diferencial. Procediendo a su integración:
T2 − T 1 =
i=n
X
Wiext
i=1
+
i=n
X
i=1
Wiint
=⇒
∆T =
i=n
X
i=1
Wiext
+
i=n
X
Wiint
i=1
Lo que podremos expresar de la siguiente forma: La variación de la energı́a cinética de
un sistema durante su desplazamiento es igual a la suma de los trabajos producidos por las
fuerzas externas e internas que actúan en el sistema durante ese intervalo.
A diferencia de lo visto en los teoremas anteriores, las fuerzas internas no quedan excluidas.
Sin embargo, existen algunos casos particulares en los que el trabajo de las fuerzas internas también se anula. Veamos alguno de estos casos:
1. Sólido rı́gido
Sean dos puntos 1 y 2 pertenecientes a un sistema sólido rı́gido. Actuarán sobre estos
int
int
puntos las fuerzas F~12
( Fuerza que actúa sobre 1 proveniente de 2 ) y F~21
( Fuerza
que actúa sobre 2 proveniente de 1 ) internas, y que como sabemos por el principio de
int
int
acción y reacción serán opuestas, es decir: F~21
= −F~12
. ( Ver Figura 5.10 )
Estando el sistema en movimiento, los puntos 1 y 2 tendrán las velocidades ~v 1 y ~v2 que
deberán cumplir el teorema de las proyecciones por tratarse de puntos pertenecientes
a un sistema indeformable.
CAPÍTULO 5. DINÁMICA
208
v1
d r1
1
F int 21
F int 12
2
d r2
v2
Figura 5.10: Fuerzas interiores en dos puntos de un sistema sólido rı́gido
P roy12
v1 = P roy12
v2
~ ~
~ ~
En un cierto intervalo de tiempo dt los puntos 1 y 2 efectuarán los desplazamientos
elementales d~r1 = ~v1 · dt y d~r2 = ~v2 · dt colineales y proporcionales con las velocidades ~v1 y ~v2 . Las proyecciones de d~r1 y de d~r2 sobre la lı́nea 12 serán también iguales.
P roy12
r1 = P roy12
r2
~ d~
~ d~
int
int
El trabajo diferencial producido por las fuerzas interiores F~12
y F~21
será por tanto:
int
int
int
int
dW12 (F~ int ) = F~12
· d~r1 + F~21
· d~r2 = F~12
· d~r1 − F~12
· d~r2 =
int
int
= F12
· P roy12
r1 − F12
· P roy12
r2 = 0
~ d~
~ d~
Extendiendo el trabajo de las fuerzas interiores a todos los posibles pares de puntos
del sistema, la suma total será también nula:
d
P
W (F~ int ) = 0
Por tanto, en el caso del sistema sólido rı́gido indeformable, el teorema de la variación
de la energı́a cinética podrá expresarse en su forma integral como:
∆T =
i=n
X
Wiext
i=1
No interviniendo ahora los trabajos producidos por las fuerzas interiores.
2. Sistema con ligaduras ideales
Si se trata de sistemas o conjuntos mecánicos compuestos por sólidos rı́gidos en los
que todos los enlaces son ideales ( sin rozamiento ), las fuerzas de enlace también
generarán en todo momento trabajos nulos.
CAPÍTULO 5. DINÁMICA
209
En efecto, si los enlaces carecen de rozamiento, las fuerzas vinculares que generan
son normales a las superficies de contacto, y los posibles movimientos compatibles
con los enlaces serán ortogonales a las reacciones normales. Por tanto, los trabajos que
generen serán nulos. Para sistemas compuestos por sólidos rı́gidos indeformables con
enlaces ideales, también será posible expresar:
∆T =
i=n
X
Wiext
i=1
5.9.11. Las siete ecuaciones universales del movimiento del sistema
Como resumen del estudio de la dinámica del sistema visto hasta ahora a través de los teoremas fundamentales podemos decir que:
La aplicación del teorema de la cantidad de movimiento, o su equivalente, el teorema
del movimiento del centro de masas, permite escribir una ecuación vectorial, y por
tanto tres escalares:
dP~
=
dt
d
i=n
X
mi · ~vi
i=1
dt
=
i=n
X
F~iext
=⇒
i=1
dPx
= Fxext
dt
dPy
= Fyext
dt
dPz = F ext
z
dt
El teorema del momento cinético con respecto al centro de masas, o con respecto a
un punto de velocidad nula, permite plantear igualmente una ecuación vectorial, y por
tanto tres escalares:
~
dL
=
dt
d
i=n
X
~ri ∧ mi · ~vi
i=1
dt
=
i=n
X
~ (F~ ext )
M
i
=⇒
i=1
dLx
= Mx (F~ ext )
dt
dLy
= My (F~ ext )
dt
dLz = Mz (F~ ext )
dt
Y por último, el teorema de la energı́a cinética permite plantear una ecuación escalar:
d
dT =
i=n
X
m · vi2
i=1
2
=d
i=n
X
i=1
Wiext + d
i=n
X
i=1
Wiint
CAPÍTULO 5. DINÁMICA
210
El conjunto de estas siete ecuaciones escalares recibe el nombre de ecuaciones universales
del movimiento del sistema.
Obsérvese que en las seis primeras ecuaciones sólo intervienen las fuerzas exteriores al
sistema, en tanto que en la última intervienen también las fuerzas interiores, salvo en los
casos ya indicados, de que el sistema sea un sólido rı́gido, o bien, que se trate de un sistema
compuesto por sólidos rı́gidos vinculados mediante enlaces ideales.
CAPÍTULO 5. DINÁMICA
211
5.10. Dinámica de la rotación del sólido alrededor de un eje
fijo.
Reacciones en los apoyos. Equilibrado estático y dinámico
Sea un sólido rı́gido con posibilidad de rotación alrededor de un eje fijo, que sin restricción de la generalidad del problema, supondremos coincidente con el eje de referencia 0Z.
( Ver Figura 5.11 )
Z
0’
F1
R2
ext
F2
h
ext
G
Fn
ext
R1
Y
0
X
Figura 5.11: Sólido que gira alrededor del eje fijo 0Z
Dicho eje se apoya en el origen de coordenadas 0(0, 0, 0) y en 0 0 (0, 0, h). En dichos apoyos
~1 y R
~ 2.
aparecerán las fuerzas reactivas R
Sobre el sólido rı́gido actúan las fuerzas exteriores F~iext (i = 1, 2, . . . , n).
Trataremos de determinar la ley del movimiento del sólido en su rotación w
~ alrededor del
eje 0Z, y las reacciones en los apoyos que experimenta el eje.
Aplicamos el teorema de la variación de la cantidad de movimiento al sistema, teniendo
~1
en cuenta que a las fuerzas exteriores F~iext habrá que añadir también las fuerzas reactivas R
~ 2.
yR
i=n
X
dP~
~1 + R
~2
=
F~iext + R
dt
i=1
i=n
M
d~vG X ~ ext ~
~2
=
Fi + R 1 + R
dt
i=1
i=n
=⇒
d(M ~vG ) X ~ ext ~
~2
=
Fi + R 1 + R
dt
i=1
CAPÍTULO 5. DINÁMICA
212
La velocidad ~vG del centro de masas G del sistema material se obtendrá:
~i ~j ~k dxG~ dyG ~
~vG = w
~ ∧ ~rG = 0 0 w = −w yG ~i + w xG ~j =
i+
j
dt
dt
xG y G z G Y derivando esta expresión:
dw
dyG ~ dw
dxG ~
d~vG
=−
yG + w
i+
xG + w
j
dt
dt
dt
dt
dt
Con lo que substituyendo en la ecuación del teorema de la variación de la cantidad de
movimiento, y proyectando sobre los ejes de referencia obtendremos:
dw
dyG
− M yG
− Mw
= Fxext + R1x + R2x
dt
dt
dw
dxG
M
x
+
M
w
= Fyext + R1y + R2y
G
dt
dt
0 = Fzext + R1z + R2z
(5.11)
Aplicamos a continuación al sólido el teorema de de la variación del momento angular con
respecto al punto fijo 0.
i=n
~0 X
dL
~ 0 (F~ ext )
=
M
i
dt
i=1
Denominamos al momento resultante en 0 de las fuerzas externas F~iext que actúan sobre
el sólido:
~ 0 = Mx ~i + My ~j + Mz ~k
M
Ası́ mismo, las reacciones en los apoyos producen los siguientes momentos respecto de 0:
~ 0 (R
~ 1 ) = ~0
M
~i
~k
~j
~
~
~
~
~
~
~
~
~
M0 (R2 ) = ~r ∧ R2 = (0 i + 0 j + h k) ∧ (R2x i + R2y j + R2z k) = 0
0
h
R2 R2 R2
x
y
z
~ 0 (R
~ 2 ) = − h R2y ~i + h R2x ~j
M
Por tanto, el teorema de la variación del momento cinético nos quedará:
CAPÍTULO 5. DINÁMICA
213
~0
dL
= (Mx − h R2y )~i + (My + h R2x )~j + Mz~k
dt
Expresamos el momento cinético en función del tensor de inercia:
0
Ixz · w
Ixx Ixy Ixz
~ 0 = Iyx Iyy Iyz · 0 = Iyz · w = Ixz · w ~i + Iyz · w ~j + Izz · w ~k
L
Izx Izy Izz
w
Izz · w
Su derivada con respecto del tiempo será:
~0 dL
dw dIxz ~ dw dIyz ~
dw ~
= Ixz
+
w i + Iyz
+
w j + Izz
k
dt
dt
dt
dt
dt
dt
dIzz
= 0, pues en su rotación el sólido permanece en posición relativa invariable
Ya que
dt
con respecto al eje Z.
Z
0’
ρ
z = Kte
0
x
Y
θ
y
X
Figura 5.12: Relación entre las coordenadas x e y en los puntos de un sólido sometido a
rotación
Por otra parte, las derivadas con respecto al tiempo de los elementos del tensor de inercia I xz
CAPÍTULO 5. DINÁMICA
214
y Iyz serán:
d
dIxz
=
−
dt
dt
Z
dIyz
d
=
−
dt
dt
Z
Ver la nota1
Z
dx
z
dm = w
dt
Z
dy
z
dm = − w
dt
x z dm = −
y z dm = −
Z
z y dm = − w Iyz
Z
z x dm = w Ixz
Sustituyendo las derivadas de Ixz y Iyz con respecto del tiempo en la expresión de la derivada
del momento cinético con respecto del tiempo, nos quedará:
~0 dL
dw
dw
dw ~
= Ixz
− w 2 Iyz ~i + Iyz
+ w 2 Ixz ~j + Iz
k
dt
dt
dt
dt
Y proyectando esta expresión vectorial sobre los ejes de referencia:
dw
Ixz
− w 2 Iyz = Mx − h R2y
dt
dw
Iyz
+ w 2 Ixz = My + h R2x
dt
dw
= Mz
Iz
dt
(5.12)
Ante el conjunto de seis ecuaciones que conforman los grupos (5.11) y (5.12) podemos hacer
las siguientes consideraciones:
La última ecuación del grupo (5.12) es la que determina la ley del movimiento del sólido
en su rotación alrededor del eje fijo. Esta ecuación coincide con la proyección del teorema
del momento angular o cinético sobre el eje.
~1
Las otras cinco ecuaciones contienen las seis componentes de las reacciones incognitas R
~ 2 , por tanto, por si solas no podrı́an determinarlas. Para ello, igual a como se ha visto en
yR
1
Observando la figura 5.12 vemos que en la rotación del sólido, la coordenada z en todos los puntos del
mismo durante el movimiento permanece constante, en tanto que para las coodenadas x e y se verifica que
dy
dx
dt = −w y , y dt = w x . En efecto:
x = ρ cos θ
y = ρ sen θ
dx
dθ
= −ρ sen θ
= −w ρ sen θ = − w y
dt
dt
dy
dθ
= ρ cos θ
= w ρ cos θ = w x
dt
dt
CAPÍTULO 5. DINÁMICA
215
el planteamiento estático, habrá que imponer alguna condición adicional, como por ejemplo,
que sea uno sólo de los apoyos el que asuma el esfuerzo axial en la dirección del eje Z.
Lo más interesante será examinar las condiciones que deben verificarse para que las reacciones en los apoyos sean las mismas que las del caso estático; es decir, para que el movimiento de rotación no tenga influencia en la carga que deben soportar los apoyos. Esto se logrará cuando:
1. xG = yG = 0; lo cual implica que el centro de masas se encuentra ubicado en el propio
eje de rotación. Si se cumple esta circustancia se dice que el sólido con respecto del
eje tiene un equilibrado estático.
2. Ixz = Iyz = 0; lo cual implica que el eje de rotación Z es un eje principal del sólido,
y que Izz es un momento de inercia principal. Cumpliéndose esta circustancia, se dice
que el sólido tiene un equilibrado dinámico con respecto al eje de rotación.
Cumpliéndose ambos supuestos, las cinco ecuaciones pasan a ser idénticas a las del equilibrio estático.
CAPÍTULO 5. DINÁMICA
216
5.11. Ecuaciones del movimiento de Euler
Sea un sistema sólido rı́gido en movimiento que tiene un punto fijo 0.
Consideramos un sistema referncial fijo o inercial con origen en 0 (X 1 , Y1 , Z1 ) con respecto
al cual realiza su movimiento el sólido, el cual presentará en ese instante una velocidad angular w.
~
Consideramos a continuación un sistema referencial móvil, también con origen en 0 (X, Y, Z)
ligado solidariamente al movimiento del sólido rı́gido, por lo que esta referencia presentará también una velocidad angular de rotación w.
~ ( Ver Figura 5.13 )
Z1
Z
ω
Y
0
Y1
X
X1
Figura 5.13: Referencia fija y referencia móvil ligada al movimiento del sólido rı́gido
Planteamos el teorema de la variación del momento angular en la referencia fija o inercial
que puede ser expresado tanto para el centro de masas G, como para el punto fijo 0:
!
i=n
X
~0
dL
~ 0 (F~ ext )
=
M
i
dt
i=1
X1 ,Y1 ,Z1
~G
dL
dt
!
=
X1 ,Y1 ,Z1
i=n
X
~ G (F~ ext )
M
i
i=1
Recordando que la derivación con respecto de una referencia fija de un vector que varı́a
a su vez con respecto a una referencia móvil, la cual está provista de una rotación w
~ es:
CAPÍTULO 5. DINÁMICA
d~r
=
dt
d~r
dt
!
217
+w
~ ∧ ~r
rel
En nuestro caso, las ecuaciones anteriores podrı́an plantearse como:
!
i=n
X
~
d L0
~
~ 0 (F~iext )
+w
~ ∧ L0 =
M
dt
i=1
X,Y,Z
~G
dL
dt
!
~G =
+w
~ ∧L
i=n
X
~ G (F~iext )
M
i=1
X,Y,Z
El desarrollo de estas expresiones lo efectuamos ahora sin considerar los subı́ndices 0 ó G, y
teniendo en cuenta que los elementos de la matriz de inercia con respecto de los ejes móviles
(X, Y, Z) son constantes, al moverse el sistema y estos ejes en forma solidaria:
d({I} · w)
~
dt
!
X,Y,Z
+w
~ ∧ ({I} · w)
~ =
i=n
X
~ (F~ ext )
M
i
i=1
Ixx Ixy Ixz
ẇx
I
w
+
I
w
+
I
w
M
xx
x
xy
y
xz
z
x
Iyx Iyy Iyz · ẇy + wx wy wz ∧ Iyx wx + Iyy wy + Iyz wz = My
Izx Izy Izz
ẇz
Izx wx + Izy wy + Izz wz
Mz
Ixx ẇx + Ixy ẇy + Ixz ẇz
Mx
My = Iyx ẇx + Iyy ẇy + Iyz ẇz +
Izx ẇx + Izy ẇy + Izz ẇz
Mz
~k
~i
~j
+
wx
wy
wz
Ixx wx + Ixy wy + Ixz wz Iyx wx + Iyy wy + Iyz wz Izx wx + Izy wy + Izz wz
Efectuando este desarrollo e identificando componentes, nos queda:
Mx = Ixx ẇx − (Iyy − Izz ) wy wz + Ixy (ẇy − wz wx ) + Iyz (wy2 − wz2 ) + Izx (ẇz + wx wy )
My = Iyy ẇy − (Izz − Ixx ) wz wx + Iyz (ẇz − wx wy ) + Izx (wz2 − wx2 ) + Ixy (ẇx + wy wz )
Mz = Izz ẇz − (Ixx − Iyy ) wx wy + Izx (ẇx − wy wz ) + Ixy (wx2 − wy2 ) + Iyz (ẇy + wz wx )
Si el sistema referencial móvil ligado al sólido elegido fuese el constituido por las direcciones principales del mismo, los términos cruzados se anuları́an, y nos quedarı́a:
CAPÍTULO 5. DINÁMICA
218
Mx = Ix ẇx − (Iy − Iz ) wy wz
My = Iy ẇy − (Iz − Ix ) wz wx
Mz = Iz ẇz − (Ix − Iy ) wx wy
Estas ecuaciones son las que se conocen como Ecuaciones del movimiento de Euler.
Se aplican solamente para momentos calculados con respecto a 0 ( punto fijo ), o con respecto a G ( Centro de masas del sólido rı́gido ).