Apéndice C. TEORÍA DE CONJUNTOS DIFUSOS
Anuncio

Apéndice C. TEORÍA DE CONJUNTOS DIFUSOS
C.1.
Algunas definiciones básicas
Conjunto difuso. Es un conjunto sin un límite definido. La transición entre
“pertenecer a un conjunto” y “no pertenecer a un conjunto” es gradual y esta
transición suave es caracterizada por una función de pertenencia. Los conjuntos
definidos de forma imprecisa desempeñan un papel importante en el pensamiento
humano, particularmente en los dominios del reconocimiento de patrones, de la
comunicación de la información y de la abstracción (Zadeh, 1965).
Inteligencia computacional (Soft computing). Es un enfoque emergente de la computación
que tiene un paralelo notable con la capacidad de la mente humana de razonar y de
aprender en un ambiente de incertidumbre e imprecisión (Zadeh, 1992). Los
componentes principales de la soft computing son la lógica difusa, la computación
neuronal y los algoritmos genéticos. Según Jang, Sun y Mizutani (1997), las
principales características del procesamiento neuro-fuzzy y del soft computing son:
que utilizan la experticia humana, son modelos computacionales inspirados en la
biología, aplican nuevas técnicas de optimización, implican cálculo numérico,
tienen nuevos campos de aplicación, tienen un modelo de aprendizaje libre,
significan procesos de cálculo intenso, son tolerantes a fallos, sus características
pueden ser enfocadas hacia un objetivo y tienen aplicaciones en el mundo real.
Razonamiento aproximado. El razonamiento con lógica difusa no es exacto sino en
cierta forma impreciso. De acuerdo con las premisas y las implicaciones difusas las
conclusiones que se obtienen o se deducen igualmente difusas (Rutkowska, 2002).
Variable lingüística. Este concepto fue introducido por Zadeh (1975) para
proporcionar una base para el razonamiento aproximado, así: “por una variable
lingüística se quiere decir que se trata de una variable cuyos valores son palabras u
oraciones en un lenguaje natural o artificial. La motivación para el uso de palabras
o de oraciones en lugar de números es que las caracterizaciones lingüísticas son, en
general, menos precisas que los valores numéricos” (Rutkowska, 2002).
Apéndice C
222
La matemática de los conjuntos difusos trabaja con conjuntos que no tienen
límites perfectamente definidos, es decir, la transición entre la pertenencia y nopertenencia de una variable a un conjunto es gradual. Estos conjuntos se
caracterizan por las funciones de pertenencia, que dan flexibilidad a la modelación
utilizando expresiones lingüísticas, tales como mucho, poco, leve, severo, escaso,
suficiente, caliente, frío, joven, viejo, etc. Surgió de la necesidad de solucionar
problemas complejos con información imprecisa, para los cuales la matemática y
lógica tradicionales no son suficientes. La lógica difusa es un lenguaje que permite
trasladar sentencias sofisticadas del lenguaje natural a un formalismo matemático.
La lógica difusa fue inventada en 1960 por Lofti Zadeh, guiado por el
principio de que las matemáticas pueden ser usadas para encadenar el lenguaje con
la inteligencia humana. Algunos conceptos pueden ser mejor definidos con
palabras, los conjuntos difusos ayudan a construir mejores modelos de la realidad.
C.2.
Características generales de los conjuntos difusos
Estas son algunas de las características matemáticas de los conjuntos difusos según
Rutkowska (2002), Jang et al. (1997), Nauk et al. (1997), Kosko (1992) y Martín del
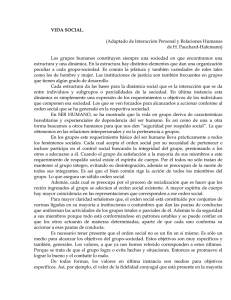
Brio y Sanz (2001). En la Figura C.1 se presentan algunas de las características de
un conjunto difuso.
Conjunto difuso: Expresa el grado de pertenencia al conjunto que tiene cada uno de
los elementos. El conjunto difuso A en X puede definirse como el conjunto de los
pares ordenados
A = {( x , µ A ( x ) ) x ∈ X }
(C.1)
donde µA(x) es la función de pertenencia al conjunto difuso.
Funciones de pertenencia: dan para cada elemento de X un grado de membresía al
conjunto A. El valor de esta función está en el intervalo entre 0 y 1, siendo 1 el
valor para máxima pertenencia. Si el valor de esta función se restringiera solamente
a 0 y 1, se tendría un conjunto clásico, o no-difuso. Esta función no es única. Las
funciones utilizadas más frecuentemente son las de tipo trapezoidal, singleton,
triangular (T), tipo S, exponencial, tipo Π (forma de campana).
Apoyo: En un conjunto difuso A es el conjunto de todos los puntos x para los
cuales la función de pertenencia (µA(x)) es mayor que cero.
Centro: En un conjunto difuso A es el conjunto de todos los puntos para los cuales
la función de pertenencia (µA(x)) es igual a 1.
Normalidad: Un conjunto difuso es normal si siempre existe un punto para el cual la
función de pertenencia es 1, es decir el centro no está vacío.
Puntos de cruce (Crossover): Son los puntos del conjunto difuso para los cuales
µA(x)=0.5
Apéndice C
223
Conjunto difuso simple (Singleton): Es el conjunto difuso para el cual el apoyo es
solamente un punto, en el cual el valor de la función de pertenencia es 1.
Conjunto α-corte: Aα de un conjunto difuso A al todos los puntos x para los que se
cumple Aα = {x µ A (x) ≥ α }
Conjunto α-corte marcado: Aα’ de un conjunto difuso A al todos los puntos x para los
que se cumple Aα′ = {x µ A (x) > α }
Convexidad: Un conjunto es convexo si y solo si para cualesquiera x1, x2 ∈ X y
cualquier λ∈ [0,1] se cumple que µ A ( λ x1 + (1 − λ ) x 2 ) ≥ min {µ A ( x1 ), µ A ( x 2 )} . Se dice
que un conjunto es convexo si todos sus conjuntos de nivel α son convexos.
Grado de pertenencia
1
0.5
Centro
Puntos de cruce
Apoyo
Figura C.1. Algunas características de un conjunto difuso
Números difusos: Es un conjunto difuso en la recta real (R) que satisface las
condiciones de normalidad y convexidad, la función de pertenencia es continua a
trozos y el centro del centro del conjunto difuso consiste de un único valor.
Intervalo difuso: Un conjunto difuso es un intervalo difuso si en la recta real (R) que
satisface las condiciones de normalidad y convexidad y la función de pertenencia es
continua a trozos.
Simetría: Un conjunto difuso es simétrico si alrededor de un punto x=c se cumple
µ A (c + x) = µ A (c − x) , para todo x ∈ X
Conjunto difuso abierto a la derecha: Un conjunto difuso A es abierto a la derecha si
cumple que lim x→ −∞ µ A ( x) = 1 y lim x → +∞ µ A ( x ) = 0
Conjunto difuso abierto a la izquierda: Un conjunto difuso A es abierto a la izquierda si
cumple que lim x →−∞ µ A ( x) = 0 y lim x → +∞ µ A ( x ) = 1
Conjunto difuso cerrado: Un conjunto difuso A es cerrado si cumple que
lim x →−∞ µ A ( x ) = lim x →+∞ µ A ( x ) = 0
Apéndice C
224
Ancho de conjuntos difusos normales y convexos: Esta definido como la distancia entre los
dos únicos puntos de cruce Ancho ( A) = x 2 − x1 , donde µA(x1)= µA(x2)=0.5
C.3.
Operaciones entre conjuntos difusos
En los conjuntos difusos son aplicables las tres operaciones básicas de los
conjuntos clásicos (unión, intersección y complemento), además de realizar
operaciones entre ellos también es posible aplicar operadores sobre un conjunto
difuso, este es el caso de la concentración y la dilatación. En la Tabla C.1 se
encuentran algunas de las operaciones básicas de los conjuntos difusos.
Tabla C.1. Operaciones entre conjuntos difusos
Operación
Definición
Contención o Subconjunto
A es subconjunto de B si y solo si µA(x)≤ µB(x), para todo
x.
A ⊆ B ⇔ µ A ( x) ≤ µ B ( x)
Unión
La unión de los conjuntos difusos A y B es el conjunto
difuso C, y se escribe como C = A ∪ B o C=A OR B, su
función de pertenencia está dada por
µ C ( x) = max (µ A ( x), µ B ( x) ) = µ A ( x) ∨ µ B ( x)
Intersección
La intersección de los conjuntos difusos A y B es el
conjunto difuso C, y se escribe como C = A ∩ B o
C=A AND B, su función de pertenencia está dada por
µ C ( x) = min (µ A ( x), µ B ( B ) ) = µ A ( x) ∧ µ B ( x)
Complemento (negación)
El complemento del conjunto difuso A, denotado por Ā
(¬ A, NOT A), se define como
µ A ( x) = 1 − µ A ( x)
Producto Cartesiano
Si A y B son conjuntos difusos en X y Y, el producto
cartesiano de los conjuntos A y B A x B en el espacio X x
Y tiene la función de pertenencia
µ A× B ( x, y ) = min (µ A ( x ), µ B ( y ) )
Co-producto Cartesiano
A + B en el espacio X x Y tiene la función de pertenencia
µ A× B ( x , y ) = max (µ A ( x ), µ B ( y ) )
Para un conjunto difuso A
Norma
Concentración
Dilatación
µ Norma ( A ) (x ) =
µ A (x ) , para x ∈ U
max[µ A ( x )]
Modificador del conjunto difuso A, hace más estrecha la
función de pertenencia
µ Conc ( A ) ( x ) = (µ A ( x ))2 , para x ∈ U
Modificador del conjunto difuso A, hace más ensancha la
función de pertenencia
µ Dilat ( A ) ( x ) = (µ A ( x ))0.5 , para x ∈ U
Apéndice C
C.4.
225
Desfusificación
Los problemas basados en conjuntos difusos se originan de la utilización de
calificaciones lingüísticas. Luego de formar los conjuntos difusos correspondientes
a un determinado problema es necesario obtener una respuesta de estos. En
muchos casos es importante que esta respuesta no sea difusa y se debe pasar de
una respuesta difusa a una que no lo es. Para lograr esto se ha desarrollado el
concepto de Desfusificación. Se han propuesto varios métodos para lograr esta
transformación, algunos de ellos se explican a continuación. El método de
desfusificación debe ser escogido de acuerdo con la aplicación que se desea hacer
(Jang et al. 1997).
C.4.1
Centroide de área (COA)
Este método consiste en hallar para cada conjunto difuso su área y la ubicación del
centroide de área. El valor desfusificado es el resultado del cociente entre el
producto entre las sumatoria de los productos del las áreas y sus centroides, y la
sumatoria de las áreas
Valor desfusificado = X =
∑Ax
∑A
i i
(C.2)
i
ó
COA =
∫µ
A
( x) xdx
X
∫µ
A
( x) dx
X
C.4.2
Procedimiento máximo
Aquí se supone que la función de pertenencia tiene solamente un punto máximo
simple, se toma el valor de desfusificación en este punto máximo
y0 ( B ) = arg max {µ B ( y ) y ∈ Y }
(C.3)
En caso que la función de pertenencia de la salida tenga varios puntos
máximos, se crea un grupo (Bmax) con estos puntos (soluciones óptimas)
{
}
Bmax = y ∈ Y µ ( y ) = max µ B ( z )
z∈Y
(C.4)
De este grupo de máximos se debe obtener un único punto. Esto se puede
hacer de varias formas. Un método es escoger aleatoriamente un punto óptimo
(supone que todas las soluciones son igualmente buenas), pero preferiblemente que
sea un punto en la mitad del conjunto de soluciones. La solución puede escogerse
también hallando el valor medio del conjunto, si este es un conjunto finito
Apéndice C
226
y0 ( B ) =
1
N
∑y
(C.5)
y∈Bmax
donde N es el número de elementos en el conjunto.
C.4.3
Centro de Gravedad
Con este método se tiene en cuenta información relacionada con la función de
pertenencia µB. Se toma la media de todos los pesos
y0 ( B ) =
C.5.
1
∑µ
B
∑ yµ B ( y )
( y ) y∈Bmax
(C.6)
Reglas difusas Si-Entonces
Como en la lógica clásica, la lógica difusa se ocupa del razonamiento formal con
proposiciones, pero a diferencia de esta, los valores de las proposiciones pueden
tener valores intermedios entre verdadero y falso. El concepto de variable
lingüística fue un escalón al concepto de reglas difusas SI-ENTONCES, estas son
una base para la lógica difusa que a menudo es utilizada en aplicaciones prácticas
(Zadeh, 1975; Rutkowska, 2002; y Zadeh, 1996). El concepto de reglas difusas es
importante cuando las dependencias descritas por estas reglas son imprecisas o
cuando no se requiere un alto grado de precisión (Rutkowska 2002).
En una regla difusa se asume como
Si x es A entonces y es B
Donde A y B son valores lingüísticos definidos por conjuntos difusos dentro de
los universos X y Y. Como en la lógica clásica a menudo “x es A” es llamada
premisa y “y es B” es llamada la conclusión o consecuencia. Este tipo de reglas puede ser
utilizado para modelar y analizar un sistema.
Varios métodos para calcular la relación R = A → B han sido propuestos. R
puede ser visto como un conjunto difuso con una función de pertenencia en dos
dimensiones
µ R ( x, y ) = f ( µ A ( x ), µ B ( y )) = f ( a , b )
(C.7)
Apéndice C
C.6.
227
Razonamiento Difuso
También llamado razonamiento aproximado es un procedimiento de inferencia que
saca conclusiones con reglas si-entonces utilizando conjuntos difusos (Jang et al.
1997).
Siendo A, A’, y B conjuntos difusos que pertenecen a X, X, y Y
respectivamente. Asume que la implicación difusa A → B es expresada como una
relación R en X × Y . El conjunto difuso B inducido por “x es A” y la regla difusa
“si x es A entonces y es B” están definidos como
µ B ' ( y ) = max x min [µ A' ( x ), µ R ( x, y )]
= ∨ x [µ A′ (x ) ∧ µ R (x )]
(C.8)
De acuerdo al problema que se desea resolver se han desarrollado
diferentes reglas para el razonamiento difuso, en estas puede variar el número de
antecedentes y de consecuencias. Se emplea también diferentes operadores para
relacionar los conjuntos difusos como Y, O, Implicación, Desfusificación, entre otros.
C.7.
Aplicaciones
La teoría de conjuntos difusos ha sido ampliamente aplicada en campos como: la
Medicina, Economía, Ecología y Biología. Se ha empleado en empresas de
producción de artículos eléctricos y electrónicos como una herramienta de control,
se ha utilizado para el desarrollo de procesadores y computadoras.
Los conjuntos difusos son usados para toma de decisiones y estimaciones
en Sistemas de Control como son: aire acondicionado, control de automóviles y
controladores en sistemas industriales.
En el campo de la Ingeniería Civil, la lógica difusa esta siendo aplicada
también en control de cierre de compuertas en presas (Chile), control de tráfico
(Puerto Rico), control de secaderos de hoja de tabaco (Cuba), control de balanceo
en puentes grúa control de nivel de líquidos en contenedores y se espera que su
aplicación se generalizará de manera muy notable en los próximos años.
La evolución del daño sísmico fue estudiada por Song, Hao, Murakami y
Sadohara (1996) utilizando lógica difusa. Zhao y Chen (2002) propusieron un
sistema difuso para el diagnóstico del daño en puentes de hormigón armado. Ellos
construyen unas funciones de pertenencia de las variables de entrada con un
algoritmo de fuzzy partitioning e induciendo reglas difusas de los datos numéricos.
El diagnóstico se basa en tres tipos de factores: factores de diseño, como tipo
estructural, longitud de las luces, ancho del tablero y cantidad de luces; factores
ambientales como humedad y precipitación, clima de la región, volumen de tráfico
y variaciones de temperatura; y otros factores como edad de la estructura, clase y
localización de los daños. Finalmente, Ahlawat y Ramaswamy (2001) propusieron
Apéndice C
228
un sistema de control de vibraciones estructurales utilizando la teoría de conjuntos
difusos; y Anoop, Rao K.B. y Rao T.V.S.R.A. (2002) propusieron usarlos en la
estimación de la vida útil de miembros estructurales en concreto reforzado.
C.8.
Referencias
Ahlawat A.S., y Ramaswamy A. (2001). Multiobjective optimal structural vibration control
using a fuzzy logic control system. Journal of Structural Engineering 127(11), pp. 1330–
1337.
Anoop M.B., Rao K.B., y Rao T.V.S.R.A. (2002). Application of fuzzy sets for estimating
service life of reinforced concrete structural members in corrosive environments.
Engineering structures, 24 (2002) pp. 1229-1242.
Jang J.-S.R., Sun C. –T., y Mizutani E. (1997). Neuro-Fuzzy and soft computing. A
computational approach to learning and machine intelligence. London, UK: Prentice-Hall.
Kosko B. (1992). Neural Networks and Fuzzy Systems: A dynamical systems approach to machine
intelligence. Englewood Cliffs, NJ: Prentice Hall.
Martín del Brío B. y Sanz A. (2001). Redes neuronales y sistemas borrosos. Ra-Ma Editorial,
Madrid, España.
Nauck D., Klawonn F., & Kruse R. (1997). Foundations of neuro-fuzzy systems. Chichester,
England: John Wiley & Sons.
Rutkowska D. (2002). Neuro-fuzzy architectures and hybrid learning, Physica Verlag,
Heidelberg, Germany.
Song Bo, Hao S., Murakami S. & Sadohara S. (1996). Comprehensive evaluation method
on earthquake damage using fuzzy theory, Journal of Urban Planning and Development,
122, 1, pp. 1-31.
Zadeh L.A. (1965). Fuzzy sets. Information and control, 8, 338-353.
Zadeh L.A. (1975). The concept of a linguistic variable and its application to approximate
reasoning, Information science, Part I, Vol. 8, pp.199-249, Part II, Vol.8, pp.301-357,
Part III, Vol. 9, pp. 43-80.
Zadeh L.A. (1992). Fuzzy logic, neural networks and soft computing. One-page course
announcement of CS 294-4, Spring 1993, the University of California at Berkeley.
Zadeh L.A. (1996). Fuzzy logic and the calculi of fuzzy rules and fuzzy graphs: a precis, Multiple
Valued Logic. Vol 1, pp. 1-38.
Zhao Z., & Chen C. (2002). A fuzzy system for concrete bridge damage diagnosis.
Computers & Structures, 80, pp. 629-641.