AMPLIFICADOR OPERACIONAL BASICO
Anuncio

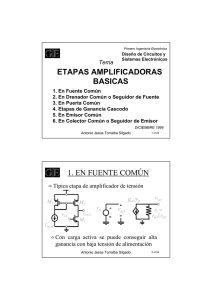
Primero Ingeniería Electrónica Tema Diseño de Circuitos y Sistemas Electrónicos AMPLIFICADOR OPERACIONAL BASICO 1. El Amplificador Operacional de 2 Etapas 2. Ganancia dc y Offset Sistemático 3. Respuesta en Frecuencia y Slew Rate 4. Modelos de primer y segundo orden. 5. Compensación. 6. Compensación y Polarización robustas. ABRIL 1999 Antonio Jesús Torralba Silgado 1 of 30 1. EL AMPLIFICADOR OPERACIONAL DE 2 ETAPAS Ö Es la versión más popular de amplificador operacional, tanto bipolar como CMOS CC v IN +A − A2 1 Primera Etapa Entrada Diferencial Segunda Etapa de Ganancia Antonio Jesús Torralba Silgado vOUT 1 Buffer de Salida 2 of 30 Una realización CMOS (L= 1.6 micras) M 10 M 11 25 M6 M5 300 300 300 M 12 M 14 100 v IN − 25 M1 M2 300 300 M8 v IN + 500 CC vOUT M 16 100 25 150 M 13 M 15 RB Circuito de Polarización M3 150 Primera Etapa Par Diferencial 500 300 M4 M7 Segunda Etapa Fuente Común Antonio Jesús Torralba Silgado M9 Buffer Salida 3 of 30 2. Ganancia dc y Offset sistemático Ö Etapa de entrada. Av 1 = g m1rout = g m1 ( rds 2 || rds 4 ) Ö Etapa de ganancia Av 2 = − g m 7 rout = − g m 7 ( rds 6 || rds 7 ) Ö Buffer de salida (sólo necesario para cargas resistivas) g m8 Av 3 ≅ G L + g m 8 + g mb 8 + g ds 8 + g ds 9 g m8 si fuente de M8 = a sustrato G L + g m 8 + g ds 8 + g ds 9 Antonio Jesús Torralba Silgado 4 of 30 Ejemplo 1 Ö Determinar la ganancia del opamp de la figura anterior si: R L = 10 K Ω V DD = −V SS = 2 .5 V I D 5 = 100 µ A ➤ µ n C ox' = 3 µ p C ox' = 96 µ A V 2 L 6 rdsi ≈ α i V D Gi + V ti con α = 5 × 10 V m I Di tomar para transistores de primera etapa V D G i = 0 .5 V y para los de la segunda V D G i = 1 V φ F = 0 .3 5 V V tn = − V tp = 0 .8 V ➤ γ = 0 .5 V ➤ La fuente del transistor M8 a tierra 0 .5 Antonio Jesús Torralba Silgado 5 of 30 Solución al Ejemplo 1 Ö Corrientes de polarización. Del circuito I D 1 = I D 2 = I D 3 = I D 4 = I D 1 2 = 50 µ A I D 6 = I D 7 = (W6 W5 )I D 5 = 100 µ A I D 8 = I D 9 = (W 9 W 7 )I D 7 = 167 µ A Ö W 2 µ i C ox' I D i L i = 0.775 m A V Transconductancias. Como g m i = g m1 = g m 2 g m 7 = 1.90 m A V g m 8 = 3.16 m A V Antonio Jesús Torralba Silgado 6 of 30 Solución al Ejemplo 1 g γ m Además g m b = 2 V + 2 φ SB tomando V SB 8 = 2 .5 V F g m b 8 = 0 .4 4 m A V Ö Resistencias de salida. Como rdsi ≈ α Li I Di V D Gi + V ti rds 1 = rds 2 = rds 3 = rds 4 = 182 K Ω rds 6 = rds 7 = 1 0 7 K Ω rd s 8 = rd s 9 = 6 4 K Ω Antonio Jesús Torralba Silgado 7 of 30 Solución al Ejemplo 1 Ö Finalmente, las ganancias ➤ Etapa de entrada. Av 1 = g m 1 ( rds 2 || rds 4 ) = 70.2 ➤ Etapa de ganancia Av 2 = − g m 7 ( rds 6 || rds 7 ) = − 102 ➤ Etapa de Salida Av 3 ≅ ➤ Ganancia G L + g m8 total g m8 = 0.85 + g mb 8 + g ds 8 + g ds 9 Av = Av 1 Av 2 Av 3 = − 6090 Antonio Jesús Torralba Silgado 8 of 30 Offset Sistemático Ö Para evitar un offset sistemático es necesario asegurar que la corriente de polarización de M7 iguala a la de M8 ➤ Por simetría, en polarización V GS 7 = V DS 4 = V DS 3 ➤ Por otra parte, 2 I D3 V DS 3 = V GS 3 = ➤y VGS 7 = µ n C ox' (W L )3 2 I D7 µ n C ox' (W L )7 + V tn + V tn Antonio Jesús Torralba Silgado 9 of 30 Offset Sistemático ➤ Además 2 I D 3 = I D 5 e I D 7 = I D 6 = (W L ) (W L ) 6 I D5 5 ➤ Sustituyendo y operando (W L ) (W L ) 7 4 =2 (W L ) (W L ) 6 5 ➤ Cumpliendo la condición anterior, el offset es únicamente debido a desapareamientos y puede ser tan pequeño como 5 o 10 mV Antonio Jesús Torralba Silgado 10 of 30 Ejemplo 2 Ö En el amplificador del ejemplo 1, la anchura de M3 y M4 se cambia a 120 micras. Si queremos una etapa de salida con una corriente de polarización de 150 microA, determinar las nuevas anchuras de M6 y M7 para que no saparezca un offset sistemático. Ö Solución: ➤ Ahora M6 debe conducir un 50 % más de corriente, por lo que W 6 = 450 µ m W W evitar offset W7 = 2 6 4 = 360 µ m W5 sistemático ➤ Para Antonio Jesús Torralba Silgado 11 of 30 3. Respuesta en Frecuencia y Slew Rate Ö La figura representa un modelo simplificado para frecuencias intermedias en que la única capacidad de interés es Cc M5 VBIAS 300 v1 v IN + v IN − M1 M2 300 300 CC v2 vOUT − Av 2 150 150 M3 M4 1 i = gm1vin Antonio Jesús Torralba Silgado 12 of 30 Respuesta en Frecuencia Ö Ö Por efecto Miller C eq = C C (1 + Ganancia de la Etapa de entrada. Av 2 ) ≈ C C Av 2 Av 1 = g m 1 Z out 1 = g m 1 ( rds 2 || rds 4 ||1 sC eq ) ➤ En frecuencias intermedias que la ganancia baja 20 dB por década, la impedancia de Ceq domina el paralelo y Av 1 ≈ g m 1 sC eq Ö Ganancia total en frecuencias intermedias Av = Av 1 Av 2 Av 3 ≈ Ö g m1 g Av 2 Av 3 ≈ m 1 sC C Av 2 sC C Por tanto, la frecuencia de ganancia unidad es, aproximadamente, ω ta ≈ g m1 g m1 ω ⇒ f ta = ta ≈ 2π 2π C C CC Antonio Jesús Torralba Silgado 13 of 30 Slew Rate Ö Cuando la entrada es muy positiva, entonces el par M1-M2 satura, toda la corriente I D 5 pasa por M1 y se copia a través del espejo M3-M4 en la salida. De igual manera, si v IN es muy negativa, M1 está cortado, toda la corriente de polarización pasa por M2 y se entrega a la salida. En ambos casos, la máxima corriente de carga o descarga de la capacidad de compensación C C es I D 5. Recordando que v O U T ≈ v 2 , la máxima tasa de variación de la tensión en la salida, conocido como Slew Rate vendrá dado por: dv O U T SR ≡ dt ≈ m ax I CC m ax CC = Antonio Jesús Torralba Silgado I D5 CC 14 of 30 Slew Rate SR = Ö 2 I D1 2 I D 1ω I D5 = = CC CC g m1 ta = V eff 1ω ta Normalmente ω ta viene fijado por la posición del segundo polo del amplificador y no puede ser aumentado sin aumentar el consumo. De la ecuación anterior, para aumentar el SR sin variar las corrientes de polarización ni ω ta , es necesario disminuir g m1 . Esto, a su vez tiene los efectos siguientes: ➤ Disminuye la capacidad de compensación ➤ Disminuye la distorsión del amplificador ➤ Aumenta el ruido térmico equivalente en la entrada del amplificador Antonio Jesús Torralba Silgado 15 of 30 Ejemplo 3 1 Determinar la frecuencia de ganancia unidad del amplificador del ejemplo 1 si C C = 5 pF 2 ¿Qué cambios debemos hacer en el amplificador si deseamos doblar el SR sin modificar las corrientes de polarización ni la frecuencia de ganancia unidad? Ö Solución: g m1 1 Como g m 1 = 0 .7 7 1 m A V ⇒ ω ta = C = 2 π × 2 4 .5 M H z C 2 Para doblar el SR, debemos disminuir g m 1 a la mitad sin variar I D 1 (a la vez que C C se reduce a la mitad para mantener ω ta ), lo que se consigue dividiendo las anchuras de M1 y M2 por 4 W1 = W 2 = 75 µ m Antonio Jesús Torralba Silgado 16 of 30 ¿Etapa de entrada nMOS o pMOS? 1 Como la segunda etapa emplea transistores complementarios a la primera, no hay variaciones significativas en la ganancia total del amplificador en uno u otro caso. 2 Si el consumo máximo está fijado, la etapa de entrada pMOS maximiza el SR ya que, a igual tamaño y corriente de polarización, el pMOS tiene menor transconductancia. También, a igualdad de compensación se requiere menor capacidad. Esta es la principal causa por la que se prefiere una etapa de entrada pMOS 3 Como veremos más adelante, el segundo polo del amplificador es proporcional a la transconductancia de la segunda etapa. Si la primera etapa es pMOS, la segunda será nMOS que, al tener mayor transconductancia, llevará el segundo polo a frecuencias mayores, permitiendo obtener un mayor GBW del amplificador completo. Antonio Jesús Torralba Silgado 17 of 30 ¿Etapa de entrada nMOS o pMOS? 4 Si hay buffer de salida, también es ventajoso una etapa de entrada pMOS, pues en este caso el buffer de salida será nMOS, por lo que, a igualdad de tamaños y corrientes de polarización: ➤ la caída de tensión en la salida es menor ➤ su transconductancia es mayor por lo que el efecto del polo parásito introducido por el buffer es menor y ➤ la disminución de ganancia para pequeñas cargas resistivas es también menor. 5 Finalmente, a igualdad de tamaños y corrientes de polarización, una etapa de entrada pMOS minimiza el ruido Flicker a la entrada del amplificador, si bien, debido a su menor transconductancia, aumenta el ruido térmico equivalente en la entrada. Antonio Jesús Torralba Silgado 18 of 30 4. Modelos de primer y segundo orden Ö Ya hemos visto que un modelo razonable para frecuencias bajas y medias de un opamp compensado por polo dominante es un modelo de primer orden, donde A 0 es la ganancia dc y ω p 1 es la posición del polo dominante: A0 A(s) = 1 + s ω p1 ( ) Por tanto, la velocidad angular de ganancia unidad ω ta Ö ( 1 ≡ A jω ta ) = (1 + jωA 0 ta Ö ω p1 ) Y, para frecuencias intermedias ≈ ω A0 ω ta ω p1 ⇒ ω ta ≈ A 0ω p1 p1 < < w < < ω ta A ( s ) ≈ ω ta s Antonio Jesús Torralba Silgado 19 of 30 Realimentación con modelo de primer orden Ö Si realimentamos el opamp con una red β GL (s ) = β A ( s ) β V out ( s ) V in ( s ) + A0 β A0 1β A LC (s ) = A ( s) A( s ) 1 + β A( s ) A(s ) GL ( s ) = β A( s ) LC A (s ) ω t = ω −LC3 dB ω ta Ö Efecto sobre la respuesta en frecuencia ω p1 Antonio Jesús Torralba Silgado 20 of 30 Realimentación con modelo de primer orden Ö Sustituyendo el opamp por su modelo de primer orden en frecuencias intermedias GL (s ) = β A ( s ) ≈ A LC (s ) ≈ Ö β A0 1+ s ω p1 ⇒ ω t ≈ β A 0ω p 1 = β ω ta GL (0 ) ≈ β A 0 ω ta s 1 β LC = [1 + s (β ω ta )] ⇒ ωA −LC3 dB(0≈) ≈β1ω βta 1 + β ω ta s En la práctica, esta aproximación es insuficiente cerca de la frecuencia de ganancia unidad de GL(s), por lo que tendremos que hacer uso de una mejor aproximación para el cálculo del circuito de compensación. Antonio Jesús Torralba Silgado 21 of 30 Tiempo de establecimiento Ö Ö Cuando un opamp realimentado se somete a una entrada escalón, la respuesta no es inmediata. Se define el Tiempo de Establecimiento (Settling Time) como el tiempo que tarda el amplificador en alcanzar un determinado porcentaje del nivel de tensión final a la salida. vOUT Lineal ( ωt ) No lineal (SR) t Respuesta típica del opamp realimentado a una entrada escalón. Dos partes: ➤ No lineal: debido al SR. Depende del valor del escalón ➤ Lineal : debido a ω − 3 dB . No depende del valor del escalón Antonio Jesús Torralba Silgado 22 of 30 Tiempo de establecimiento Ö Asumiendo que el escalón es pequeño, de manera que sólo interviene el término lineal, la salida es exponencial con una constante de tiempo τ = 1 ω − 3 d B = 1 β ω ta v O U T ( t ) = V e sc a lo n (1 − e − t ) τ Ö Por ejemplo, para alcanzar un 1% de precisión, se requiere un tiempo de 4 .6 τ segundos. Para un 0.1 %, se requieren 7 τ segundos. Ö Finalmente, la máxima pendiente a la salida se tiene en el instante inicial y vale V e sc a lo n τ . Si el SR es mayor que este valor, no habrá parte nolineal en la salida. Antonio Jesús Torralba Silgado 23 of 30 Realimentación con modelo de segundo orden Ö Cuando nos aproximamos a la frecuencia de ganancia unidad de GL(s) en un opamp óptimamente compensado el modelo de primer orden del opamp no es suficiente, entonces A0 A(s) = 1 + s ω p 1 1 + s ω eq ( )( ) donde ω eq es la frecuencia del polo que modela los polos y ceros de orden superior (desde el punto de vista de la desviación de fase) 1 ≅ ω eq Ö m ∑ i=2 1 − ω pi n 1 ∑ω i =1 zi Desde el punto de vista experimental, ω eq es la frecuencia para la que el desfase del opamp en bucle abierto es de -135 grados Antonio Jesús Torralba Silgado 24 of 30 Realimentación con modelo de segundo orden Ö Con vistas a realizar la compensación del sistema, nos es conveniente establecer la relación que existe entre el margen de fase y la respuesta temporal del sistema realimentado. Para ello, empleando el modelo de segundo orden del opamp, vamos a seguir el siguiente procedimiento: ➤ ➤ ➤ ➤ Calcularemos la relación ω t ω eq que me proporciona un margen de fase dado. Luego determinaremos el valor de Q en el polinomio denominador que corresponde a un valor dado de ω t ω eq Conocido el valor de Q, podemos estimar la sobreoscilación de un sistema de segundo orden frente a una entrada escalón. Concluiremos que es necesario tener un elevado margen de fase para conseguir una respuesta sin sobreoscilación Antonio Jesús Torralba Silgado 25 of 30 Realimentación con modelo de segundo orden Ö Ö Finalmente, veremos un método de compensación del sistema que permite obtener un elevado margen de fase sin sacrificar la frecuencia de ganancia unidad respecto de la posición óptima fijada por las corrientes de polarización y por la posición de los polos y ceros parásitos del amplificador. Por último, indicar que todo el desarrollo que sigue se realizará para un amplificador realimentado con una red β cualquiera, aunque es usual que se calcule la compensación para β = 1 , que es el peor valor posible de β . Esto nos llevará, en general, a un exceso de compensación del sistema Antonio Jesús Torralba Silgado 26 of 30 Modelo de segundo orden Ö Ahora, en frecuencias medias y altas ( ω > > ω p 1 ) ω ta A0 ≈ A (s) = 1 + s ω p 1 1 + s ω eq s 1 + s ω eq ( ➤ Ö )( ) ( ) esta expresión es especialmente válida en la frecuencia de ganancia unidad del lazo ω t , ya que ω t ω p 1 ≈ A 0 β > > 1 Para calcular ω t hacemos unidad la ganancia de lazo abierto ( G L jω t )= β ω ta ωt ωt 1 + ω eq = 1⇒ 2 ( β A jω β ω ta ω eq t ) = 1⇒ = ωt ω eq ωt 1 + ω eq Antonio Jesús Torralba Silgado 2 27 of 30 Modelo de segundo orden Ö Además para ese rango de frecuencias ( ω > > ω ∠ G L ( jω ➤ Ö ( − ta n − 1 ω o ω eq ) ) en particular para ω = ω t . Recordando la definición de Margen de Fase (MF) M F = ∠ G L ( jω ➤ Ö ) = − 90 p1 de donde ω t = ω t )− (−180 ( ) = 9 0 o − ta n − 1 ω ta n (9 0 − M F o eq o ) t ω eq ) Por tanto, la frecuencia de ganancia de lazo unidad en un amplificador óptimamente compensado depende sólo del margen de fase deseado y de la posición de los polos y ceros parásitos, y es independiente tanto de β como de A 0 Antonio Jesús Torralba Silgado 28 of 30 Modelo de segundo orden Ö Si calculamos ahora la ganancia de lazo cerrado A LC (s ) = ➤ Ö A( s ) ≈ 1 + β A( s ) LC con A 0 = A 0LC 1+ s (1 ω p 1 + 1 ω eq ) s2 + 1 + β A0 (1 + β A0 )ω p 1ω eq 1 A0 ≅ 1 + β A0 β Expresándolo en forma normalizada ω = 0 Q = (1 + β A 0 )ω (1 + β (ω A0 ) 1 ω p1 p1 +1 ω ω p1 eq ω eq ≅ )≅ Kω 0 ( ) s 2 + ω 0 Q s + ω 02 β ω ta ω eq β A0 ω ω eq p1 = eq Antonio Jesús Torralba Silgado β ω ω ta eq 29 of 30 Modelo de segundo orden Ö De todas las relaciones anteriores, y recordando que % so b re o sc ila c io n = 1 0 0 e π − 4 Q 2 −1 podemos construir la siguiente tabla MF ω t ω eq Q % so b reo sc. 55o 60o 0 .7 0 0 0 .9 2 5 1 3 .3 0 .5 8 0 0 .8 1 7 8 .7 65o 70o 0 .4 7 0 0 .7 1 7 4 .7 0 .3 6 0 0 .6 2 2 1 .4 75o 0 .2 7 0 0 .5 2 7 0 .0 0 8 Antonio Jesús Torralba Silgado 30 of 30