Definiciones básicas de control
Anuncio

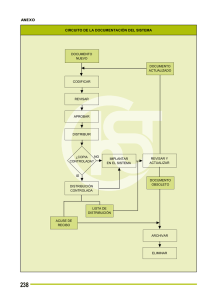
UNIVERSIDAD NACIONAL DE INGENIERIA FACULTAD DE INGENIERIA QUIMICA Y TEXTIL CONTROLES ELECTRICOS Y AUTOMATIZACION INTRODUCCION A LOS SISTEMAS AUTOMATICOS DE CONTROL Ing. Jorge Cosco Grimaney 2011 INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 2 INDICE 1 INTRODUCCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 1.1 Introducción 1.2 Concepto de sistemas 1.3 Sistemas de control 1.4 Sistemas de medición 1.5 Definiciones básicas de control 1.5.1 1.5.2 1.5.3 1.5.4 1.5.5 1.5.6 1.5.7 1.5.8 1.5.9 1.5.10 1.5.11 1.5.12 1.5.13 1.5.14 1.5.15 1.5.16 1.5.17 1.5.18 1.5.19 1.6 Sistema Sistema de control automático Planta Variables del sistema Perturbación Señal de referencia Señal de error Unidad de control Unidad de realimentación Actuador Transductor Sensor Amplificador Proceso Variable controlada Variable manipulada Variable perturbadora Variable medida Variable de entrada Sistemas de control clásico 1.6.1 Sistemas de control de lazo abierto 1.6.2 Sistemas de control de lazo cerrado 1.7 Controlador 1.8 Actuador 1.9 Diagramas de control 1.9.1 1.9.2 1.9.3 1.9.4 Símbolos en instrumentación Símbolos en control de procesos Símbolos de elementos finales de control Símbolos de dispositivos primarios INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 3 1.1 INTRODUCCION Un sistema automático de control es un conjunto de componentes físicos conectados o relacionados entre sí, de manera que regulen o dirijan su actuación por sí mismos, es decir sin intervención de agentes exteriores (incluido el factor humano), corrigiendo además los posibles errores que se presenten en su funcionamiento. El control automático estudia los modelos matemáticos de sistemas dinámicos, sus propiedades y el cómo modificar éstas mediante el uso de otros sistemas dinámicos llamados controladores. El ser humano utiliza constantemente sistemas de control en su vida cotidiana, como en su vista, en su caminar, al conducir un automóvil, al regular la temperatura de su cuerpo y otros. Los conocimientos de esta disciplina se aplican para controlar procesos químicos, procesos térmicos, procesos mecánicos y en todo tipo de maquinaria industrial, vehículos terrestres y aeroespaciales, robots industriales, plantas generatrices de electricidad, etc. El control ha evolucionado desde básicos sistemas mecánicos, hasta modernos controladores digitales. En un principio, los sistemas de control se reducían prácticamente a reacciones; éstas eran provocadas mediante contrapesos, poleas, fluidos, etc. A principios del siglo pasado, se comenzó el trabajo con modelos matemáticos más estrictos para realizar el control automático. Se inició por ecuaciones diferenciales; luego, surgió el análisis de la respuesta en frecuencia y lugar geométrico de las raíces. Con el surgimiento de sistemas digitales que posibilitan el análisis en el dominio del tiempo, los sistemas de control moderno se basaron en éste y las variables de estado. El uso de las computadoras digitales ha posibilitado la aplicación en forma óptima del control automático a sistemas físicos que hace algunos años atrás eran imposibles de analizar o controlar. Uno de estos avances esta dado por la aplicación de las técnicas de control difuso, aplicaciones con redes neuronales, simulación de sistemas de control y sistemas expertos entre otros. El Control Automático juega un papel fundamental en los sistemas y procesos tecnológicos modernos. Los beneficios que se obtienen con un buen control son enormes. Estos beneficios incluyen productos de mejor calidad, menor consumo de energía, minimización de desechos, mayores niveles de seguridad y reducción de la polución. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 4 1.2 SISTEMA Es una unidad formada por una serie de elementos que tienen algún tipo de interrelación entre sí, y que pueden ser considerados como un conjunto respecto a algunas propiedades o características Cada elemento tiene condiciones físicas asociadas que definen parámetros. A los parámetros de cada elemento se les denomina parámetros del sistema. Las condiciones físicas de cada componente son cambiantes con el tiempo y determinan el estado del sistema en cada momento y se les denominan variables del sistema. Figura 1 Los sistemas se definen en todas las áreas. En control lo analizaremos en el contexto de sistemas físicos que se describen por leyes de las ciencias físicas. 1.3 SISTEMA DE CONTROL Un sistema de control está definido como un conjunto de componentes que pueden regular su propia conducta o la de otro sistema con el fin de lograr un funcionamiento predeterminado Un sistema de control controla la salida del sistema a un valor o secuencia de valores determinados. El objetivo de cualquier estrategia de control es mantener una variable llamada controlada próxima a un valor deseado conocido como punto de ajuste “set-point. La variable controlada debe permanecer estable, El principio de todo sistema de control automático es la aplicación del concepto de realimentación o feedback (medición tomada desde el proceso que entrega información del estado actual de la variable que se desea controlar) cuya característica especial es la de mantener al controlador central informado del estado de las variables para generar acciones INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 5 correctivas cuando así sea necesario. Este mismo principio se aplica en campos tan diversos como el control de procesos químicos, control de hornos en la fabricación del acero, control de máquinas herramientas, control de variables a nivel médico e incluso en el control de trayectoria de un proyectil militar. Figura 2 Un sistema de control puede ser mecánico, neumático, hidráulico, eléctrico, electrónico o por computadora (PLC) Un sistema de control de un intercambiador de calor hombre sería como en la figura 3. controlado por un ENTRADA DE AGUA FRIA sensor proceso SALIDA DE AGUA CALIENTE acción correctora ENTRADA DE VAPOR controlador compara computa Lazo de Control FIGURA 3 El operador mide la temperatura de salida, compara el valor deseado, calcula cuanto más abrirá la válvula de vapor, y hace las correcciones correspondientes; así las funciones básicas del control manual realizado por un ser humano son: Medir, Comparar, Calcular, Corregir. Los fundamentos de un sistema de control automático se encuentran en las funciones de control manual realizadas por el hombre. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 6 1.4 SISTEMA DE MEDICIÖN Los sistemas de medición permiten conocer las magnitudes de los parámetros físicos de los sistemas de control que se analiza o controlan. Un sistema de medición esta formado por: SENSOR.- Transforma una variable física en una señal eléctrica Figura 4 ACONDICIONADOR.- Amplifica, filtra y linealiza la señal proporcionada por el sensor CONVERTIDOR ANALOGO DIGITAL.- Es el dispositivo señal análoga a señales digitales. CAD que convierte la Figura 5 PROCESADOR.- Analiza y memoriza la información y lo envía a los visualizadores VISUALIZADOR.- Es el dispositivo donde se presentan los resultados puede ser un display, un dispositivo electromecánico, etc. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 7 1.5 DEFINICIONES BASICAS DE CONTROL Sistema: es un conjunto de elementos interrelacionados capaces de realizar una operación dada o de satisfacer una función deseada Sistema de control automático: El control automático es el mantenimiento de un valor deseado para una cantidad o condición física, midiendo su valor actual, comparándolo con el valor referencia, y utilizando la diferencia para proceder a reducirla mediante una acción correctiva. Planta: Sistema sobre el que pretendemos actuar. Figura 6 Variables del sistema: Son todas las magnitudes, sometidas a vigilancia y control, que definen el comportamiento de un sistema (velocidad, temperatura, posición, etc.). Entrada: Es la excitación que se aplica a un sistema de control desde una fuente de energía externa, con el fin de provocar una respuesta. Salida: Es la respuesta que proporciona el sistema de control. Perturbación: Son las señales no deseadas que influyen de forma adversa en el funcionamiento del sistema. Por ejemplo abrir una ventana representa una perturbación en el sistema de control de temperatura mediante termostato. Señal de referencia: es una señal de entrada conocida que nos sirve para calibrar al sistema. Señal de error: también denominada señal activa. Representa la diferencia entre la señal de entrada y la realimentada. Unidad de control: Gobierna la salida en función de una señal de activación. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 8 Unidad de realimentación: está formada por uno o varios elementos que captan la variable de salida, la acondicionan y trasladan a la unidad de comparación. Actuador: Es un elemento que recibe una orden desde el regulador o controlador y la adapta a un nivel adecuado según la variable de salida necesaria para accionar el elemento final de control, planta o proceso. Transductor: Transforma una magnitud física en otra que es capaz de interpretar el sistema. Sensor: Transforma una magnitud física en una señal eléctrica Los sensores son los elementos primarios de medición de variables del proceso, siendo algunos usados para lectura e indicación y otros para transformar la variable medida en una señal eléctrica, los más usados en la industria son los de velocidad, nivel, presión, temperatura, flujo, proximidad, tensión, densidad, humedad, color, entre otros. Pueden ser de Contacto, No Contacto, Digital o Analógico. Los sensores de contacto realizan la medida en contacto físico con el producto; por ejemplo los sensores de boyas para medir el nivel de un tanque. Los sensores de no contacto se basa en las propiedades físicas de los materiales para realizar su medida, son menos propensos a fallas. Los sensores digitales son más fáciles de usar y trabajan como una computadora en forma binaria en dos estados: encendido (ON) o apagado (OFF). Los sensores analógicos proporcionan medidas continuas, pudiendo ser más utilizadas en diversos parámetros de operación, como son: el nivel, la presión, temperatura y el flujo Amplificador: Proporciona un nivel de señal procedente de la realimentación, entrada, comparador, etc., adecuada al elemento sobre el que actúa. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 9 Proceso: El término planta o proceso, para los fines de control significa el equipo a automatizar en donde se estabiliza la variable de control, a través de los sensores, actuadores y controladores. Las respuestas de un proceso a una determinada perturbación están casi siempre caracterizadas por dos constantes: una constante de tiempo (τ) y una ganancia estática. La ganancia es la amplificación o atenuación de la perturbación en el interior del proceso y no tiene interferencia con las características de tiempo de respuesta. La constante de tiempo, es la medida necesaria para ajustar un sistema de una perturbación en la entrada y puede ser expresada como producto de: τ = resistencia x capacidad Otro factor importante en la dinámica de procesos incluye el movimiento de masas entre dos puntos y es denominado atraso de transporte o tiempo muerto Variable Controlada Es el parámetro más importante del proceso, debiéndose mantener estable (sin cambios), pues su variación alteraría las condiciones requeridas en el sistema, su monitoreo a través de un sensor es una condición importante para dar inicio al control. ENTRADA DE AGUA FRIA VALVULA DE VAPOR Variable controlada TEMPERATURA SALIDA DE AGUA CALIENTE BULBO ENTRADA DE VAPOR TERMOMETRO INDICADOR Figura 7 En el ejemplo mostrado del intercambiador de calor de la figura se observa, la intención de calentar agua a través del vapor, para lo cual se deberá tener en cuenta las diversas variable de proceso como son: los flujos de vapor y agua, las presiones de vapor y las temperaturas del agua; pero, la más importante del sistema es la temperatura de salida del agua, que sería en este caso la Variable Controlada. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 10 Variable Manipulada Es el parámetro a través del cual se debe corregir las perturbaciones del proceso, colocándose un actuador para lograr estabilizar el sistema. En el ejemplo del intercambiador de calor, quien proporciona mayor o menor cantidad de energía al sistema es el ingreso de vapor, por lo tanto la variable a manipular será el flujo de ingreso de vapor. VARIABLE PERTUBARADORA DETECTOR DE ERROR O CONTROLADOR ENTRADA SET POINT VALOR DE REFERENCIA ERROR PERTURBACIÓN ACTUADOR Ó ELEMENTO FINAL DE CONTROL VARIABLE MANIPULADA PROCESO VARIABLE CONTROLADA SALIDA SENSOR Ó ELEMENTO DE MEDICIÓN VARIABLE MEDIDA Figura 8 Variable Perturbadora Es el parámetro desestabilización del sistema por cambios repentinos afectando el proceso. En el ejemplo, la variable perturbadora sería el flujo de entrada de agua fría, si por una baja de tensión se altera el funcionamiento de la bomba de suministro de agua, provocaría un menor ingreso de flujo al proceso originando la desestabilización del sistema. Variable Medida Es todo parámetro del proceso requerido para conocer su valor, por lo tanto deberá ser monitoreado; no siendo necesariamente la mas importante para controlar el sistema, pero si para mantener un registro de data. Variable de Entrada Es el parámetro fijado mediante medios eléctricos, electrónicos, o por software para que el sistema actué INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 11 1.6 SISTEMAS DE CONTROL CLASICO Existen diversas estrategias de control como; Control de lazo abierto (open loop control), Control con retroalimentación (Feedback), Control en cascada, Control de relación (Ratio control) y Control Predictivo. Los sistemas de control básicos son el de lazo abierto y el de lazo cerrado de ellos se diseñan sistemas para satisfacer necesidades especiales de un proceso y su comprensión es importante para entender los sistemas complejos de control. 1.6.1.- Sistemas de Control de Lazo Abierto En estos sistemas la variable controlada no se retroalimenta. La conformidad entre el valor alcanzado por la variable controlada y su valor de referencia depende de la calibración, y consiste en establecer una relación entre la variable manipulada y la variable controlada. Estos sistemas solo son útiles en ausencia de perturbaciones En estos sistemas de control la salida no tiene efecto sobre la acción de control, es decir no se compara la salida con la entrada de referencia. Por lo tanto, para cada entrada de referencia corresponde una condición de operación fija. Así, la precisión del sistema depende de la calibración y del operador cuya función será la del controlador. Figura 9 En presencia de perturbaciones, un sistema de control de lazo abierto no cumple su función asignada, por no tener una forma de conocer el resultado del control efectuado o salida del proceso. La figura 10 corresponde a un el intercambiador de calor donde la variable controlada está expuesta a perturbaciones que la entrada no entera. D(s) Figura 10 Valor de Referencia V(s) "Set point" R(s) Ajuste de Parámetros A(s) Controlador Gc(s) Perturbación GD(s) Variable Manipulada M(s) Acción de Control F(s) Elemento Final de control Gv(s) + Proceso Gp(s) + Variable Controlada C(s) INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 12 En la figura 11 se muestra un control de concentración de una solución salina donde se puede observar que la salida no modifica la posición de la válvula de la solución concentrada en caso de perturbaciones externas al sistema solución Agua concentrada B, X B A, X a = 0 Manómetro calibrado en unidades de concentración HIK P, Xp Solución Salina Figura 11 Luego podemos afirmar que los fundamentos de un sistema de control automático en este sistema deben de provenir de las funciones básicas del control manual realizadas por un ser humano. En la práctica el control de lazo abierto sólo se utiliza si la relación entre la entrada y la salida es conocida y si no se presentan perturbaciones tanto internas como externas significativas. Sus características mas importantes son. Fácil montaje y mantenimiento Bajo costo No tiene problemas de estabilidad Nada asegura su estabilidad ante una perturbación La salida no se compara con la entrada Afectado por las perturbaciones La precisión depende de la previa calibración del sistema 1.6.2.- Sistema de Control de Lazo Cerrado Se denomina sistema de control de lazo cerrado cuando frente a presencia de perturbaciones, tiende a reducir la diferencia entre la salida del sistema y el valor deseado o “set point”. El principio de funcionamiento consiste en medir la variable controlada mediante los captadores o sensores, convertirla en señal y retroalimentarla para compararla con la señal de entrada de referencia. La diferencia entre ésta y la señal retroalimentada constituye la señal de error, la cual es empleada por la Unidad de Control para calcular la variación a realizar en la variable manipulada y mediante los accionadores restablecer la variable controlada en su valor de referencia. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 13 Figura 12 En la figura 13 la planta o proceso entrega información mediante los captadores o sensores a la unidad de control y este ordena mediante los accionadores o actuadores la corrección de la variable controlada que es proporcionada a la unidad de control por el nivel de supervisión Figura 13 INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 14 1.7 CONTROLADOR El controlador es una componente del sistema de control que detecta los desvíos existentes entre el valor medido por un sensor y el valor deseado o “set point”, programado por un operador; emitiendo una señal de corrección hacia el actuador La señal que entrega el controlador se llama señal de control o manipulada y la entregada por la salida, señal controlada, como se observa en la figura 14. Señal manipulada Señal controlada Figura 14 Un controlador puede ser del tipo eléctrico, electrónico, neumático o hidráulico, encargado de controlar uno o más procesos. Al principio los controladores estaban formados exclusivamente por componentes discretos, conforme la tecnología fue desarrollándose actualmente se utilizan microprocesadores microcontroladores o Pic. En la figura 15 el controlador recibe una señal del sensor, procesa la información y mediante un transductor lo convierte en una señal neumática para que el actuador regule el nivel del tanque.. Señal Eléctrica Controlador Señal Eléctrica Figura 15 Sensor Transductor Actuador PROCESO Válvula Neumática Señal Neumática INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 15 Los controladores industriales se clasifican, de acuerdo con sus acciones de control, como: 1. De dos posiciones o de encendido y apagado (on/of) 2. Proporcionales 3. Integrales 4. Proporcionales-integrales - PI 5. Proporcionales-derivativos - PD 6. Proporcionales-integrales-derivativos - PID Figura 16 Casi todos los controladores industriales emplean como fuente de energía la electricidad o un fluido presurizado, tal como el aceite o el aire. Los controladores también pueden clasificarse, de acuerdo con el tipo de energía que utilizan en su operación, como neumáticos, hidráulicos o electrónicos. Existe otro tipo de clasificaciones que analizaremos mas adelante El tipo de controlador que se use debe decidirse con base en la naturaleza de la planta y las condiciones operacionales, incluyendo consideraciones tales como seguridad, costo, disponibilidad, confiabilidad, precisión, peso y tamaño. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 16 1.8 ACTUADOR Los actuadores son los elementos finales de control, tienen por función alterar el de la variable manipulada con el fin de corregir o limitar la desviación del controlado, respecto al valor deseado. Los fabricantes actualmente proveen una de actuadores como: motores, válvulas, relés, y swicthes. Los actuadores importantes son: valor valor serie más Actuadores Eléctricos Son usados en la industria y en aplicaciones comerciales para posicionar dispositivos de movimientos lineal o rotacional. Tales como swicthes, relés, motores y otros. Actuadores Neumáticos Aceptan señales de presión pequeñas, desde los posicionadores neumáticos y mediante un diafragma, convierten estas señales en movimientos mecánicos. Actuadores Hidráulicos Los actuadores hidráulicos operan en forma similar a los posicionadores neumáticos, pero con una mayor fuerza de acción, para ser usados en compuertas, grúas, elevadores y otros. 1.9 DIAGRAMAS DE CONTROL Los símbolos y diagramas son usados en el control de procesos para indicar la aplicación en el proceso, el tipo de señales empleadas, la secuencia de componentes interconectadas y de alguna manera, la instrumentación empleada. La Sociedad de Instrumentistas de América (ISA por sus siglas en ingles Instruments Society of América) publica normas para símbolos, términos y diagramas que son generalmente reconocidos en la industria. Estas normas ayudan a utilizar e interpretar los símbolos utilizados en el control de procesos. 1.9.1 Símbolos en Instrumentación Los instrumentos son generalmente identificados por números en una etiqueta. El número de la etiqueta identifica (1) la función en el proceso y (2) el lazo de control en el cual está localizado. La figura 17 indica cómo las letras y los números son seleccionados y agrupados para lograr una rápida identificación. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 17 Figura 17 Las señales de instrumentación utilizadas en el control de procesos son usualmente de los siguientes tipos: Neumática, electrónica (eléctrica), capilar, hidráulica, sónica o indicando radioactividad. Cada señal tiene un símbolo diferente y los símbolos son mostrados en la figura 18. Fig. 18. Líneas de Conexión de Instrumentos 1.9.2 Símbolos en el Control de Procesos Los símbolos de los instrumentos que representan un proceso de intercambio de calor están mostrados en la figura 19. Note que se utilizan varios elementos primarios y varios tipos de señales son utilizados. Aunque las señales eléctricas y neumáticas no son comúnmente utilizadas juntas, ambas son utilizadas en este diagrama para demostrar aplicaciones típicas de los símbolos de instrumentos. Así el registrador de flujo 100 que está montado en el panel, tiene una entrada neumática y el controlador registrador de temperatura 101 que está montado en el panel, tiene un sistema de llenado térmico o entrada capilar La salida neumática del transmisor montado localmente FT 102 (figura.19) envía una señal al registrador que está en el panel de control con la identificación FR 102. El 1 identifica la localización en el panel. Información similar del lazo de presión (PT 103 y PR 103) incluye el hecho que la presión de salida es registrada. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL 18 Fig. 19. Símbolos de Instrumentos en un Proceso Cuando se miden fluidos compresibles (gas, aire, vapor), el uso de la presión de entrada o la de salida afectará significativamente la cantidad final o el volumen que se calcule con los datos registrados en las graficas. En el ejemplo mostrado en la figura 19, el vapor fluye al intercambiador para calentar el fluido del proceso. La línea que une el transmisor de presión al proceso es colocada en el intercambiador en el lado de salida de la placa de orificio, lo cual indica que se registra la presión de salida .En el lazo de flujo 100, el elemento de flujo o dispositivo primario difiere del que se utilizó en el lazo de vapor. En el lazo de temperatura (TRC 101), el elemento final de control es una válvula. Las letras FO justo debajo del símbolo de la válvula, indica que la válvula abre si el diafragma se rompe, o la señal de aire falla, o si existe una condición similar. El segundo circulo unido al TRC (TS 101) significa que se utiliza un interruptor para activar un TAL (alarma por baja temperatura por sus siglas en ingles Temperarure Alarm Low), la cual también está localizada en el panel de control. 1.9.3 Elementos finales de control. Las válvulas, elementos finales en los lazos de control se muestran en la figura 20 las válvulas son los elementos de control más comunes, sin embargo se utilizan también otros elementos finales de control como son los amortiguadores, controles de velocidad o circuitería de posición. Nótese que cualquiera de los actuadores listados puede ser utilizado con cualquiera de los cuerpos de las válvulas mostradas. Usualmente se utilizan sólo los símbolos más simples y se reservan las especificaciones detalladas para los diagramas de los lazos de control. INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL Fig. 20. Símbolos de Elementos finales de control 1.9.4 Los dispositivos primarios para temperatura, presión, nivel, flujo, etc Fig. 21. Símbolos de Temperatura 19 INTRODUCION A LOS SISTEMAS AUTOMATICOS DE CONTROL Fig. 22. Símbolos de Presión Fig. 23. Símbolos de fluidos 20