15. Introducción a los sistemas secuenciales
Anuncio

15. Introducción a los sistemas
secuenciales
Oliverio J. Santana Jaria
Sistemas Digitales
Ingeniería Técnica en Informática de Sistemas
Curso 2006 – 2007
Introducción
La capacidad de memorización es básica para el diseño
de sistemas digitales complejos
Los elementos de memorización hacen posible que el
comportamiento de un circuito dependa no sólo de las
entradas actuales, sino también de las anteriores
Los objetivos de este tema son:
Definir los sistemas secuenciales: circuitos capaces de
recordar los valores anteriores de las entradas
Definir el concepto de circuito biestable y su uso en la
implementación de sistemas secuenciales
Describir el diseño y comportamiento de distintos tipos de
circuitos biestables
Introducción a los sistemas secuenciales
2
1
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
3
Sistemas combinacionales
Los sistemas combinacionales se caracterizan por el
hecho de que sus salidas se calculan exclusivamente
a partir de los valores actuales de las entradas
Este tipo de circuitos no es capaz de recordar lo que
ha ocurrido en el pasado, lo que limita sus posibles
aplicaciones para el diseño de sistemas complejos
x0
x1
xm
conjunto
… de puertas
lógicas
y0
{x0, x1, … xm} ≡ Xt
y1
yn
…
{y0, y1, … yn} ≡ Yt
Yt = F(Xt)
Introducción a los sistemas secuenciales
4
2
Sistemas secuenciales
La principal diferencia de los sistemas secuenciales es
que poseen componentes de memoria que les permiten
recordar lo sucedido en el pasado
Se denomina estado del sistema al contenido de los
componentes de memoria, el cual depende de los
valores anteriores de las entradas del sistema
x0
x1
xm
conjunto
… de puertas
lógicas
y0
{x0, x1, … xm} ≡ Xt
y1
yn
…
memoria
{y0, y1, … yn} ≡ Yt
Yt = F(Xt, Xt-1, Xt-2 , …)
Introducción a los sistemas secuenciales
5
Sistemas secuenciales
Los sistemas secuenciales se caracterizan por el hecho
de que sus salidas se calculan conjuntamente a partir
del estado del sistema y los valores actuales de entrada
El término secuencial indica que el estado del sistema,
y por tanto sus salidas, depende de la secuencia de
valores de entrada hasta el momento presente
Dado que los componentes de memoria son finitos,
el tamaño de la secuencia recordada y el conjunto de
posibles valores del estado también será finito
Introducción a los sistemas secuenciales
6
3
Tipos de sistemas secuenciales
Los sistemas secuenciales asíncronos son aquellos que
cambian el valor del estado y las salidas siempre que
hay un cambio en los valores de entrada
Los sistemas secuenciales síncronos sólo cambian el
valor del estado y las salidas en instantes de tiempo
fijos determinados por una señal de reloj
Introducción a los sistemas secuenciales
7
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
8
4
Elementos de memoria
El circuito más simple posible que es capaz de recordar
un valor booleano está formado por dos puertas NOT
Este circuito se representa habitualmente con los dos
inversores orientados en la misma dirección y con dos
salidas Q y Q’ que tendrán valores complementarios
Introducción a los sistemas secuenciales
9
Elementos de memoria
El circuito se denomina biestable porque puede
mantenerse de forma totalmente estable en cualquiera
de dos estados posibles: 0 y 1
Estado 0
Estado 1
1
0
0
1
0
1
1
0
Este biestable básico es capaz de memorizar el valor de
un bit, aunque los diseños reales necesitarán señales de
entrada para actualizar su valor
Introducción a los sistemas secuenciales
10
5
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
11
El biestable SR
Un biestable SR es un circuito con dos entradas y dos
salidas que consta de dos puertas NOR conectadas de
forma cruzada
Introducción a los sistemas secuenciales
12
6
El biestable SR
Al ser un circuito secuencial, el estado de un biestable
SR depende tanto de los valores de entrada como del
estado actual del circuito
La salida Q permite conocer el estado actual del
biestable, mientras que Q’ es el complemento de Q
Las señales de entrada tienen el objetivo de cambiar
el valor booleano almacenado por el biestable
Cuando se activa la señal S (set) el biestable almacena un 1
Cuando se activa la señal R (reset) el biestable almacena un 0
Cuando las dos señales están desactivadas el biestable
permanece en el estado actual
La activación de las dos entradas a la vez no debe permitirse
Introducción a los sistemas secuenciales
13
Tabla de transiciones
El comportamiento de un biestable se define utilizando
una tabla de transiciones, la cual indica el siguiente
estado de las salidas en función de las entradas y el
estado actual de las salidas
A partir de la tabla de transiciones puede obtenerse una
ecuación característica que defina el biestable
Introducción a los sistemas secuenciales
14
7
Tabla de excitación
Otra forma de definir el comportamiento de un
biestable es usando una tabla de excitación
Esta tabla nos muestra el valor que debe aparecer en la
entrada del circuito para que se realice un determinado
cambio en el estado de las salidas del biestable
Introducción a los sistemas secuenciales
15
Diagrama de estados
Una tercera forma de caracterizar un biestable es por
medio de un diagrama de estados
Cada estado se representa con un círculo
Una transición entre estados se representa con una flecha
Las flechas se etiquetan con los valores de las señales
de entrada que causan la transición
Introducción a los sistemas secuenciales
16
8
Comportamiento de un biestable SR
Este cronograma muestra el comportamiento de
un biestable SR suponiendo que:
El estado inicial del biestable es 0
Cada puerta tiene un retardo de 1,4 unidades de tiempo
Introducción a los sistemas secuenciales
17
Comportamiento de un biestable SR
En el instante de tiempo t0 se activa la señal S, por lo
que el estado del biestable pasa a ser 1
En el instante de tiempo t1 se desactiva la señal S, pero
el estado del biestable sigue siendo 1
Introducción a los sistemas secuenciales
18
9
Comportamiento de un biestable SR
En el instante de tiempo t2 se activa la señal R, por lo
que el estado del biestable pasa a ser 0
En el instante de tiempo t3 se desactiva la señal R, pero
el estado del biestable sigue siendo 0
Introducción a los sistemas secuenciales
19
Comportamiento de un biestable SR
En el instante de tiempo t4 se activa la señal S, por lo
que el estado del biestable pasa a ser 1
En el instante de tiempo t5 activa la señal R, por lo que
las dos entradas están activas al mismo tiempo
Introducción a los sistemas secuenciales
20
10
Comportamiento de un biestable SR
Mientras S y R estén activas al mismo tiempo las dos
salidas Q y Q’ valdrán 0
La señal S se desactiva primero en t6, por lo que el
estado del biestable pasa a ser 0 y sigue siéndolo
incluso después de que se desactive la señal R en t7
Introducción a los sistemas secuenciales
21
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
22
11
Carrera crítica en un biestable SR
La activación de las dos entradas al mismo tiempo se
considera una combinación prohibida en este tipo de
biestables, ya que si las entradas S y R cambian al
mismo tiempo no se puede predecir el valor de salida
Dando por hecho que las puertas tienen el mismo
retardo, ambas salidas valdrán 1 al mismo tiempo,
luego valdrán 0 al mismo tiempo y así sucesivamente
Esta oscilación en los valores de la salida, comúnmente
llamada carrera crítica, continuará hasta que vuelva a
producirse un cambio en alguna de las entradas
Introducción a los sistemas secuenciales
23
Carrera crítica en un biestable SR
En los instantes de tiempo t8 y t9 se activan las señales
S y R respectivamente, para luego desactivarse al
mismo tiempo en el instante t10
El estado del biestable será 1 en el instante t10, luego
será 0 tras el retardo de puerta y continuará oscilando
Introducción a los sistemas secuenciales
24
12
Carrera crítica en un biestable SR
Si las puertas NOR del biestable no tienen exactamente
el mismo retardo, la puerta NOR más rápida prevalecerá
y pondrá su salida a 1
Dado que no se puede asegurar que dos puertas tengan
el mismo retardo o no, si las señales de entrada cambian
al mismo tiempo el siguiente estado es indefinido
Como consecuencia, cuando se diseña un circuito con
biestables SR hay que asegurarse de que las señales S y
R nunca cambien de valor al mismo tiempo
Introducción a los sistemas secuenciales
25
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
26
13
El biestable SR sincronizado
Un biestable SR sincronizado dispone de una tercera
entrada de control C que habilita o deshabilita el
funcionamiento del biestable
Cuando la señal C vale 1 el biestable está habilitado y se
comporta como un biestable SR
Cuando la señal C vale 0 el biestable está deshabilitado y
permanece en su estado actual con independencia de los
valores de las entradas
El término “sincronizado” hace referencia al hecho de
que la entrada de control C suele conectarse a la señal
de reloj del sistema
Introducción a los sistemas secuenciales
27
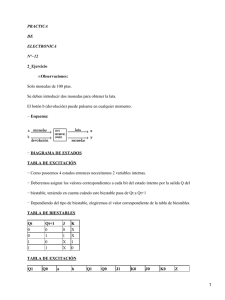
Biestables activos por nivel
Este tipo de biestable suele denominarse activo por
nivel porque están habilitados siempre que la entrada
de control C esté en el nivel activo
Mientras la señal de control esté activa cualquier cambio en
las entradas del biestable afectará al estado del mismo
Cuando la señal de control está inactiva el biestable se
comporta como un elemento de memoria, ya que recuerda el
estado anterior con independencia de los valores de entrada
El diseño de un biestable SR sincronizado (SR-C para
abreviar) pude realizarse de forma que la entrada de
control C sea activa a nivel alto o activa a nivel bajo
Introducción a los sistemas secuenciales
28
14
Comportamiento de un biestable SR-C
Este diagrama muestra un biestable SR sincronizado
activo a nivel alto, así como la tabla de transiciones
que define su funcionamiento
Introducción a los sistemas secuenciales
29
Comportamiento de un biestable SR-C
Este cronograma muestra el comportamiento de
un biestable SR suponiendo que
El estado inicial del biestable es 0
Cada puerta tiene un retardo de 1,4 unidades de tiempo
Introducción a los sistemas secuenciales
30
15
Comportamiento de un biestable SR-C
Aunque la señal S se pone a 1 en t0 el estado del
biestable permanece en 0
El cambio de estado del biestable a 1 solo se permite
cuando se activa también la señal C en t1
Introducción a los sistemas secuenciales
31
Comportamiento de un biestable SR-C
Una vez que C se desactiva en t2, los cambios de las
entradas en t3 y t4 no afectan al estado del biestable
Dado que R permanece a 1 cuando C vuelve a activarse
en t5, el estado del biestable pasa a ser 0
Introducción a los sistemas secuenciales
32
16
Comportamiento de un biestable SR-C
Los flancos de las señales no son instantáneos, es
necesaria una determinada cantidad de tiempo para
que la señal cambie de valor
Antes del cambio de flanco hay un tiempo de
establecimiento (t ) en el que comienza el cambio
Después del cambio de flanco hay un tiempo de
mantenimiento (t ) en el que la señal se estabiliza
setup
hold
Las señales de entrada del biestable no deben cambiar
durante el tiempo que dure un flanco de subida o bajada
de la señal C
Introducción a los sistemas secuenciales
33
Comportamiento de un biestable SR-C
Por ejemplo, en el tercer pulso de la señal C
El intervalo t11 – t12 debe ser mayor que el tiempo de
establecimiento previo al flanco
El intervalo t12 – t13 debe ser mayor que el tiempo de
mantenimiento posterior al flanco
Introducción a los sistemas secuenciales
34
17
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
35
El biestable JK
El objetivo del biestable JK es eliminar el problema
que supone para los diseños que usan biestables SR el
tener prohibida una combinación de valores de entrada
El biestable JK es similar al biestable SR, ya que
las señales de entrada J y K son equivalentes a las
señales S y R
La principal diferencia es que el biestable está diseñado
para cambiar de estado cuando las dos entradas J y K se
activen al mismo tiempo, por lo que no hay necesidad
de prohibir esta combinación de valores de entrada
Introducción a los sistemas secuenciales
36
18
El biestable JK
Para diseñar un biestable JK podemos partir de un
biestable SR
La salida Q se realimenta a la entrada C, haciéndole un AND
con la señal de entrada K
La salida Q’ se realimenta a la entrada S, haciéndole un AND
con la señal de entrada J
Introducción a los sistemas secuenciales
37
El biestable JK
La única diferencia entre el funcionamiento lógico
del biestable JK con respecto al SR aparece cuando
se activan al mismo tiempo la dos entradas J y K
Si el estado del biestable es 0, solo se activa la puerta
AND cuyas entradas son J y Q’, por lo que el biestable
pasa al estado 1
Si el estado del biestable es 1, solo se activa la puerta
AND cuyas entradas son K y Q, por lo que el biestable
pasa al estado 0
Introducción a los sistemas secuenciales
38
19
El biestable JK sincronizado
El diseño de un biestable JK sincronizado sería similar
al diseño de un biestable SR sincronizado, incluyendo
una señal de control C para habilitar su funcionamiento
Introducción a los sistemas secuenciales
39
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
40
20
El biestable D
El principal problema de los biestables SR es que
los diseñadores que trabajan con ellos deben estar
pendientes de que las entradas no cambien a la vez
Este problema puede solucionarse modificando el
diseño del biestable SR para que sólo tenga una señal
de entrada, dando lugar al biestable D
La señal de entrada D se conecta a la señal S, mientras
que a la señal R se conecta la inversa de D, lo que
garantiza que S y R no cambiarán al mismo tiempo
Introducción a los sistemas secuenciales
41
El biestable D sincronizado
Un biestable D también puede tener una entrada
de control C que habilite su funcionamiento,
convirtiéndose en un biestable activo por nivel
Introducción a los sistemas secuenciales
42
21
Comportamiento de un biestable D
Este cronograma muestra el comportamiento de
un biestable D sincronizado suponiendo que
El estado inicial del biestable es 0
Debido al inversor, la transición 01 está retrasada 4
unidades de tiempo y la transición 10 sólo 3 unidades
Introducción a los sistemas secuenciales
43
Comportamiento de un biestable D
Cuando la señal C se activa en t1, el estado del biestable
pasa a 1 ya que la señal D también está activada
Cuando la señal C se activa en t4, el estado del biestable
pasa a 0 ya que la señal D está desactivada
Introducción a los sistemas secuenciales
44
22
Comportamiento de un biestable D
Si D hubiera cambiado durante los pulsos de reloj
entre los instantes t1 – t2 y t4 – t5, el estado del biestable
hubiera cambiado siempre que el cambio de D hubiera
ocurrido antes de tsetup
Introducción a los sistemas secuenciales
45
Comportamiento de un biestable D
Al activarse C en el instante de tiempo t7 el estado del
biestable pasará a 1 porque D está activa
Cuando D se desactive en t8 el estado del biestable
pasará a 0 siempre que el intervalo de tiempo t8 – t9
sea mayor que tsetup
Introducción a los sistemas secuenciales
46
23
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
47
El biestable T
El biestable T (toggle ) representa un diseño alternativo
de biestable con una sola señal de entrada
Este biestable consiste en un biestable JK al que se han
conectado las dos entradas a una única señal de entrada
Siempre que la señal de entrada T sea 0, tanto J como K
están a 0 y el estado del biestable no cambia
Siempre que la señal de entrada T sea 1, tanto J como K
están a 1 y el estado del biestable cambia
Introducción a los sistemas secuenciales
48
24
El biestable T sincronizado
Un biestable T también puede tener una entrada
de control C que habilite su funcionamiento,
convirtiéndose en un biestable activo por nivel
Introducción a los sistemas secuenciales
49
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
50
25
Entradas asíncronas
Los biestables pueden disponer de entradas asíncronas
independientes de la señal de reloj
En general, las entradas asíncronas se utilizan para
poner el estado del biestable a 1 (preset) o a 0 (clear)
antes de su funcionamiento normal
La necesidad de inicializar el estado del biestable
se debe a que, por ejemplo, al conectar un circuito
a la corriente no se puede predecir cuál será el estado
inicial del biestable
Introducción a los sistemas secuenciales
51
Entradas asíncronas
Al ser asíncronas, estas entradas tienen prioridad
sobre el resto de las operaciones síncronas por lo que,
cuando las entradas asíncronas están activadas, el resto
de entradas son ignoradas
Mientras una de las entradas asíncronas esté activada,
el biestable permanecerá en el estado impuesto por ella
con independencia de las demás entradas
Cuando la señal de puesta a uno preset está activada, la salida
Q será 1 y la salida Q’ será 0
Cuando la señal de puesta a cero clear está activada, la salida
Q será 0 y la salida Q’ será 1
Introducción a los sistemas secuenciales
52
26
Biestable D con entradas asíncronas
Como ejemplo, este diagrama muestra un biestable
D sincronizado con entradas asíncronas activas a nivel
alto, que puede diseñarse fácilmente a partir de un
biestable SR
Introducción a los sistemas secuenciales
53
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
54
27
La señal de reloj del sistema
El funcionamiento de los circuitos sincronizados está
regulado por medio de una señal de reloj que digitaliza
el transcurso del tiempo
El valor de la señal de reloj cambia de 0 a 1 y viceversa
a intervalos fijos, de una forma cíclica y continua
0
1
0
1
0
1
0
1
0
1
0
1
0
1
Al ser una señal digital, el reloj divide el tiempo
en una secuencia de instantes, cada uno de los cuales
se identifica alternativamente con un 0 o con un 1
Introducción a los sistemas secuenciales
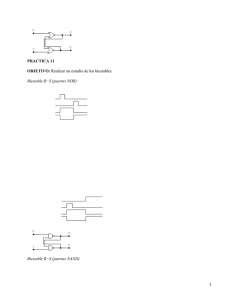
55
Activación por niveles
Los biestables activos por nivel están habilitados
siempre que la señal de reloj del sistema está en un
nivel determinado, ya sea cero o uno
Por ejemplo, este diagrama muestra tres biestables D
conectados en cadena y con una misma señal de reloj
La latencia del cambio 01 es de 4 unidades de tiempo
La latencia del cambio 10 es de 3 unidades de tiempo
Introducción a los sistemas secuenciales
56
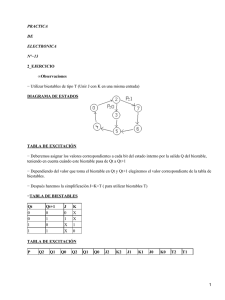
28
Problemas de la activación por niveles
El objetivo de este circuito es que el valor X entre en
el primer biestable durante el primer pulso de reloj y
luego vaya pasando a los siguientes biestables en los
pulsos de reloj posteriores
Sin embargo, como puede verse en este cronograma, el
funcionamiento del circuito es distinto del esperado
Introducción a los sistemas secuenciales
57
Problemas de la activación por niveles
El circuito anterior ha funcionado de forma errónea
debido a que el pulso de reloj duraba demasiado
Aunque pueda parecer que reducir el ancho del pulso
hasta igualarlo al retardo del biestable podría ser la
solución, esto presentaría varios problemas
El retardo del biestable no siempre es el mismo, por lo que
un pulso que sirva para poner un biestable a 1 puede no servir
para ponerlo a 0 y viceversa
No se puede medir el retardo del biestable con total precisión,
por lo que un pulso demasiado corto podría no dar tiempo a
que el biestable cambie de valor
La frecuencia de la señal de reloj esta limitada físicamente
Introducción a los sistemas secuenciales
58
29
Biestables maestro-esclavo
Una posible solución a este problema es combinar dos
biestables, dando lugar a un biestable maestro-esclavo
La entrada al biestable maestro es la entrada del circuito
La salida del biestable maestro es la entrada del esclavo
La salida del biestable esclavo es la salida del circuito
Ambos biestables se sincronizan con una misma señal
de reloj, pero el maestro se habilita cuando el reloj está
a 0 y el esclavo cuando el reloj está a 1
Introducción a los sistemas secuenciales
59
Biestables maestro-esclavo
La ventaja de los biestables maestro-esclavo es que
nunca están completamente habilitados
Cuando el maestro está habilitado el esclavo está deshabilitado
Cuando el maestro está deshabilitado el esclavo está habilitado
Un ejemplo de este funcionamiento puede verse en el
siguiente cronograma
Introducción a los sistemas secuenciales
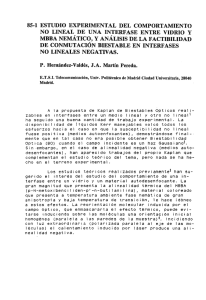
60
30
Biestables maestro-esclavo
Cuando la entrada D pasa a valer 1 en t0 el biestable
maestro cambia su estado porque está habilitado, pero
el cambio no se propaga al esclavo
El cambio solo se propaga al esclavo cuando el reloj
cambia y lo habilita en t1
Introducción a los sistemas secuenciales
61
Biestables maestro-esclavo
El biestable maestro vuelve a ser habilitado en t2, por
lo que su estado cambia cuando la entrada D pasa a
valer 0 en t3
Este cambio no se propaga al esclavo hasta que la señal
de reloj cambia de nuevo y lo habilita en t4
Introducción a los sistemas secuenciales
62
31
Biestables maestro-esclavo
El biestable maestro vuelve a estar deshabilitado a
partir de t5, por lo que el cambio de D no es tenido en
cuenta hasta que es habilitado en t6, aunque teniendo en
cuenta el retardo debido al inversor de la señal de reloj
El cambio solo se propaga al esclavo cuando el reloj
cambia y lo habilita en t7
Introducción a los sistemas secuenciales
63
Captación de señales en los flancos
En general, se puede decir que el valor de la señal D se
capta en el flanco de subida del reloj
El valor de la entrada D es captado por el biestable maestro
antes del flanco de subida del reloj
El valor de la entrada D se transfiere al biestable maestro
justo después del flanco de subida del reloj
Introducción a los sistemas secuenciales
64
32
Captación de señales en los flancos
Utilizando el esquema maestro-esclavo podemos
reconstruir el circuito de tres biestables encadenados
que planteamos anteriormente
El circuito tendrá un total de seis biestables que
representan el estado total del circuito, aunque
consideraremos que las salidas del circuito vienen
dadas por los biestables esclavo
Introducción a los sistemas secuenciales
65
Captación de señales en los flancos
Como puede verse en este cronograma, cuando la
señal de entrada cambia en t0 sólo el primer maestro
responderá cambiando en t1
Introducción a los sistemas secuenciales
66
33
Captación de señales en los flancos
El primer esclavo cambiará poco después, pero el
cambio no se propagará al segundo maestro hasta t2
Introducción a los sistemas secuenciales
67
Captación de señales en los flancos
Aunque el segundo maestro ya ha cambiado, el segundo
esclavo ignorará el cambio hasta que sea habilitado al
comienzo del segundo pulso de reloj en t4
Introducción a los sistemas secuenciales
68
34
Captación de señales en los flancos
Este cambio originará que también cambie el tercer
maestro un poco después pero, de nuevo, el cambio no
se propagará al esclavo hasta el siguiente pulso de reloj
Introducción a los sistemas secuenciales
69
Captación de señales en los flancos
De esta manera hemos obtenido el comportamiento
deseado del circuito: que el valor de la entrada se
propague al siguiente biestable en cada pulso de reloj
Introducción a los sistemas secuenciales
70
35
Captación de señales en los flancos
Por lo tanto, el contenido del circuito se desplaza una
posición a la derecha en cada flanco de subida del reloj,
comenzando en 000 y pasando a 100, 010, 001 y 000
Introducción a los sistemas secuenciales
71
Biestables activos por flanco
Ésta es una de las técnicas más conocidas para la
construcción de circuitos biestables que se activen en
los flancos de una señal de reloj, ya sea en los flancos
de subida o en los de bajada
0
1
0
1
0
1
0
1
0
1
0
1
0
1
La breve duración del flanco evita los problemas que
aparecían en los biestables activos por nivel
Por este motivo, los biestables activos por flanco son
usados muy frecuentemente para el diseño de sistemas
digitales secuenciales
Introducción a los sistemas secuenciales
72
36
Biestables activos por flanco
Un biestable activo por flanco se identifica por medio
de un pequeño triángulo dibujado junto a la entrada de
la señal de reloj
Dado que estos circuitos sólo cambian de estado en los
flancos de reloj, podemos definir el estado de un sistema
secuencial como el contenido de todos los biestables
durante el intervalo de tiempo entre dos flancos de reloj
Introducción a los sistemas secuenciales
73
Estructura del tema
Introducción
Principios básicos de los sistemas secuenciales
Circuitos biestables
El biestable SR
El biestable JK
El biestable D
El biestable T
▫ Carrera crítica
▫ El biestable SR sincronizado
Biestables con entradas asíncronas
Biestables activos por flanco
Resumen y bibliografía
Introducción a los sistemas secuenciales
74
37
Resumen
Los sistemas secuenciales son capaces de recordar
valores anteriores de las señales de entrada gracias
a la utilización de circuitos biestables
Los biestables se suelen diseñar de forma que el valor
almacenado cambie únicamente en el flanco de subida
o de bajada de una señal de reloj que sincroniza el
funcionamiento del sistema en su totalidad
Gracias a esto, la salida de un sistema secuencial no
sólo depende de los valores actuales de las entradas,
sino también del estado actual del sistema, que es
definido por el contenido de todos sus biestables
Introducción a los sistemas secuenciales
75
Bibliografía
Principios de Diseño Digital
Capítulo 6
Daniel D. Gajski
Prentice Hall, 1997
Introducción a los sistemas secuenciales
76
38