Document
Anuncio

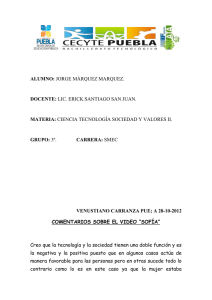
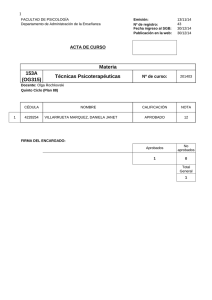
SENSORES BASICOS Métodos de medición sensibles a desplazamientos; sensores: Resistivos Capacitivos Inductivos d Piezoeléctricos Instrumentación-Jorge Marquez CCADET 2013 1/60 Sensores de desplazamiento/posición basados en resistencias variables: potenciómetros (para corrientes pequeñas) y reostatos variables (corrientes grandes. Mayor disipación) “wiper” Figure 2.1 Three types of potentiometric devices for measuring displacements (a) Translational. (b) Single-turn). (c) Multi-turn. (From Measurement Systems: Application and Design, by E. O. Doebelin. Copyright 1990 by McGraw-Hill, Inc. Used with permission of McGraw-Hill Book C ) – [Webster] Co.) [W b ] Instrumentación-Jorge Marquez CCADET 2013 2 Potenciómetros y reostatos a a Pueden utilizarse como divisores de voltaje obteniendo un voltaje de salida VL en el punto de control (slider o wiper, nodo “a” en la figura), dado un voltaje de entrada fijo VS en los extremos del potenciómetro potenciómetro. El voltaje a través de la carga RL es: A la derecha se muestra un modelo de una resistencia i t i variable i bl (potenciómetro ( t ió t o reostato) t t ) con valores R1, R2 definidos por el control, slider o wiper (a). La taza fwiper= R2(R1+ R2 ) es la fracción de wiper. R2 RL VL ·Vs . R1 RL R2 RL R1 R2 Usualmente RL es la impedancia de entrada de un voltímetro, por lo que es muy grande comparada con R1, R2 , por lo que obtenemos la relación lineal: R2 VL V f V R1 R2 s wiper s Trimmer o preset : dispositivo electrónico ajustable (R,C,L) Trimpot : trimmer potentiometer Fader : potenciómetro lineal miniatura Instrumentación-Jorge Marquez CCADET 2013 3 En términos de desplazamientos, con x aquel asociado a la posición del wiper ( R2 es proporcional a x) y xP al intervalo máximo del potenciómetro, y correspondiente di a RP=R R1+R R2 se obtiene bi ( (tarea moral), l) para RL (finita) (fi i ) la l relación exacta: x / xP RL / RP VL Vs R / R x / x x / x 2 L P P P VL/VS RL/ RP = 10 RL/ RP = 1.0 RL/ RP = 0.1 que no depende de las constantes de proporcionalidad de x y R2, y de xP y RP. Una taza de fwiper p = R2(R1+ R2 ) = RL/ RP de 10 da muy buena linealidad (ver figura). Notar que también se tiene fwiper = x/xP. fwiper = x/xP Instrumentación-Jorge Marquez CCADET 2013 4 Galgas Extensiométricas (de deformación – Strain Gauges) VARIACIÓN DE LA RESISTENCIA Un material de área transversal A y longitud L, con resistividad , tendrá una resistencia neta: L R A La sensitividad de la resistencia a la variación en los parámetros, dL d dR A LdA L A A 2 y el cambio relativo en la resistencia, será R L A R L A R L (1 2 ) R L es la razón o tasa de Poisson entre diámetro y longitud; en general, depende d la de l fforma ((geometría) t í ) de d la l galga: l efecto dimensional efecto piezorresistivo / L/L Instrumentación-Jorge Marquez CCADET 2013 Deformación ( strain L ) 5 Factor de galga (o de deformación; depende del material): R / R / GF (1 2 ) L / L L / L Este resultado E l d es válido álid no sólo ól para áreas á circulares, i l pues ell área á es esencialmente cuadrática. En el caso de una sección circular transversal, A= r2. Con fuerza de tensión a lo largo de la longitud L, haciendo h i d L = L/L / y con un esfuerzo f t transversal l (radial) ( di l) t en dirección de r, tenemos: R L 2 t R En la práctica, la resistencia también depende de la temperatura; el efecto total es entonces: R GF L T R Con el coeficiente de temperatura T. Instrumentación-Jorge Marquez CCADET 2013 6 Instrumentación-Jorge Marquez CCADET 2013 7 Galga de deformación en un sensor de presión Diaphragm A B Armature C D Strain-gage S g ge wires w es Unbonded strain-gage pressure sensor. The diaphragm is directly coupled by an armature to an unbonded strain-gage system. With increasing pressure, the strain on gage pair B and C is increased, increased while that on gage pair A and D is decreased. [Webster]. Instrumentación-Jorge Marquez CCADET 2013 8 c R2 vi Rx R1 Ry b a R4 R3 balance ( v0 0)) iff : R1 / R2 R4 / R3 d vo Ri Wheatstone bridge g with four active elements. R1 = B,, R2 = A,, R3 = C,, and R4 = D when the unbonded strain gage is connected for translation motion. Resistor Ry and potentiometer Rx are used to initially balance the bridge. vi is the applied voltage and v0 is the output voltage on a voltmeter or similar device with an internal resistance of Ri. [Webster] – watch out for errors in editions 2010. Instrumentación-Jorge Marquez CCADET 2013 9 Typical bonded strain strain-gage gage units (a) Resistance Resistance-wire wire type type. (b) Foil type. type (c) Helical-wire type. Arrows above units show direction of maximal sensitivity to strain.[Parts (a) and (b) are modified from Instrumentation in Scientific Research, by K. S. Lion. Copyright 1959 by McGraw-Hill, Inc. Used with permission of McGraw-Hill Book Co.] Instrumentación-Jorge Marquez CCADET 2013 10 Puente de Wheatstone En el punto de Balance (Vg=0): Rx ( R1 / R2 )· ) R3 R2 es variable, Rx puede Vg ser una resistencia i t i desconocida (v.g. una galga) (Configuración Blackburn; resistencias distintas a la de la configuración del Webster) Instrumentación-Jorge Marquez CCADET 2013 11 Puente de Wheatstone El p puente de Wheatstone es un circuito diseñado p para encontrar la resistencia (o en general la impedancia) de un componente sabiendo la de otros tres componentes. Constituye un “método” con muchas aplicaciones de medición precisa. Para un voltaje de entrada Vin dado: Vin VACD VABD I ACD ( R1 R2 ) I ABD ( R4 R3 ) C R1 A R2 R3 D Vg La diferencia de potencial entre AB y AD es: VAC I ACD R1 R4 B Vin VAB I ABD R4 Vin R1 R2 Vin R4 R3 R1 R4 Mi Misma configuración fi ió d dell Blackburn, Bl kb con R4 = Rx Instrumentación-Jorge Marquez CCADET 2013 12 Cálculo de una resistencia desconocida, o de un voltaje El voltaje Vg puede obtenerse de: Vg VAC VAB Vin R1 R2 R1 Vin R4 R3 R4 R1 R3 R2 R4 Vin ( R1 R2 )( R4 R3 ) Suponemos que todas las resistencias pueden cambiar durante la medición. Entonces el cambio en el voltaje leído será: Vg Vg ( R1 R1 )( R3 R3 ) ( R2 R2 )( R4 R4 ) ( R1 R1 R2 R2 )( R4 R4 R3 R3 ) Instrumentación-Jorge Marquez CCADET 2013 Vin 13 Balance del circuito de Puente de Wheatstone • Si el puente esta inicialmente balanceado, balanceado el voltaje inicial Vg debería ser cero: RR R R Vg 1 3 2 4 ( R1 R2 )( R4 R3 ) Vin 0 R1 R3 R2 R4 o sea: • • Entonces: R1 R4 1 R2 R3 r r R1 R2 R3 R4 (1 )Vin 0 Vg 2 R2 R3 R4 (1 r ) R1 Y esta definida por: 1 (1 r ) 1 R1 R4 R2 R3 r R1 R4 R R 3 2 Instrumentación-Jorge Marquez CCADET 2013 14 Cuando los cambios en la resistencia son pequeños (<5%), (<5%) el segundo término , es aproximadamente cero y puede ser ignorado, entonces: r R1 R2 R3 R4 Vin Vg 2 R2 R3 R4 (1 r ) R1 El coeficiente r/(1+ r)2 es llamado eficiencia de circuito. En la práctica, para medir voltajes, se usa el mismo valor para las cuatro resistencias R1=R2=R3=R4=R. Notemos entonces que r =1 en este caso, y el cambio en el voltaje será: R1 R2 R3 R4 Vg Vin 4R Instrumentación-Jorge Marquez CCADET 2013 15 Puente de Impedancias (Wheatstone Generalizado) En el punto de Balance (Vg=0): Z x (Z1 / Z 2 )· ) Z3 Zx Z1 Las impedancias Z contienen términos resistivos (parte real) y reactivos (parte imaginaria). Vg Z3 Z3 Instrumentación-Jorge Marquez CCADET 2013 16 Ejercicio 1. En el circuito siguiente, encuentre expresiones para los valores del capacitor p Cx y la resistencia Rx en términos de las demás componentes. p Circuito conocido como “Puente Puente de Schering. Schering ” Instrumentación-Jorge Marquez CCADET 2013 17 Ejercicio 2 . En el circuito siguiente, deducir las relaciones entre las impedancias (condiciones de balance). balance) Circuito conocido como “Puente de Hay” y (también ( “filtro de inductancia de Hay”). y ) Instrumentación-Jorge Marquez CCADET 2013 18 Ejercicio 3. Verificar que para el puente de Maxwell-Wien (figura) se obtienen las relaciones siguientes (¿qué diferencias hay con los puentes de Hay y de Schering?): R1·R4 R3 R2 L3 R1·R4 ·C2 Aplicación: p hallar el valor L en términos de una resistencia y una capacitancia p calibradas Instrumentación-Jorge Marquez CCADET 2013 19 Efecto Piezo-resistivo: • Variación de la resistividad de un material al someterse a tensión mecánica o deformación. • Efecto anisotrópico. • Depende del “dopado” del material (semiconductor) de la piezo-resistencia. • Se sitúan piezo-resistencias en los lugares de máxima d f deformación ió d de lla lá lámina i ((soporte). t ) • Disposición en una configuración de puente de Wheatstone. Wheatstone • No confundir con efecto piezo-eléctrico (generación de un potencial a partir de deformaciones o presión) Instrumentación-Jorge Marquez CCADET 2013 20 Ejemplo en Medicina: Pletismógrafo (cambios de volumen en un órgano, por fluctuaciones en sangre o aire) Instrumentación-Jorge Marquez CCADET 2013 21 Figure 2.5 Mercury-in-rubber strain-gage plethysmography (a) Four-lead gage applied to human calf. calf (b) Bridge output for venous-occlusion venous occlusion plethysmography. plethysmography (c) Bridge output for arterial-pulse plethysmography. [Part (a) is based on D. E. Hokanson, D. S. Sumner, and D. E. Strandness, Jr., "An electrically calibrated plethysmograph for direct measurement of limb blood flow." 1975, BME-22, 25-29; used with permission of IEEE Trans. Biomed. Eng., 1975, New York.] Instrumentación-Jorge Marquez CCADET 2013 22 Problemas eventuales en sensores de galga extensiométrica de resistencia elástica y soluciones La galga de deformación de resistencia elástica es muy usada en aplicaciones médicas, por su fácil aplicación en mediciones sobre el cuerpo; sin embargo presentan los siguientes problemas: • Tienen respuesta no-lineal no lineal para largas extensiones (30%), (30%) • en caso falta de tensión u holgura (slackness), tiene una banda de linealidad “muerta”; a largo plazo está sujeta a deformación permanente, permanente • la continuidad en la columna de mercurio y de la columna con los electrodos puede constituir un problema, • estas galgas tienen un elevado coeficiente de deriva en temperatura, • la respuesta p dinámica y la resistencia mecánica finita p pueden causar distorsiones. Instrumentación-Jorge Marquez CCADET 2013 23 Los problema anteriores pueden minizarse: • Seleccionando con cuidado el tamaño adecuado de galga para lo que se desea medir (una extremidad, extremidad el torso, torso un pie, pie el antebrazo (adulto, bebé, persona obesa, etc.). • la galga debe extenderse ligeramente para el desplazamiento mínimo al ser aplicada, para eliminar el problema de holgura o falta de tensión (precargar la galga), • la continuidad en el mercurio se verifica usando un ohmmetro, • los problemas de deriva en temperatura pueden minimizarse con calibración continua o realizando mediciones en un ambiente de temperatura controlado. Instrumentación-Jorge Marquez CCADET 2013 24 Sensores Inductivos Una inductancia L permite medir desplazamientos al variar cualquiera de los parámetros á de d las l bobinas b bi (coil): ( l) L n 2G n = Número de vueltas de la bobina G = Factor F t de d forma f geométrico ét i = permeabilidad efectiva del medio Cada parámetro puede cambiarse por medios mecánicos. a c c a c a b b c c d d d b d (a) d (b) e (c) Figure 2.6 Inductive displacement sensors (a) Self-inductance. Self inductance. (b) Mutual inductance. (c) Differential transformer (LDVT). Instrumentación-Jorge Marquez CCADET 2013 25 La figura 2.6(c) ilustra el Transformador Diferencial Variable Lineal (LVDT), muy usado en medicina clínica e investigación fisiológica para medir presión, fuerza y desplazamientos mayores a los medidos por resistencias variables. El acoplamiento entre las bobinas es cambiado por el movimiento de un cilindro (slug) de una aleación con alta permitividad magnética. La disposición de las bobinas secundarias en serie, serie conectadas “en en oposición oposición”, permite un intervalo lineal más amplio. El voltaje de salida es Vcd=Vce Vde. Cuando el cilindro es posicionado simétricamente entre las bobinas, ambos voltajes secundarios son iguales y la señal de salida es 0. Corte de un LVDT. La corriente es dirigida por la bobina primaria en A, causando la generación de una corriente inducida a través de las bobinas secundarias en B. La sensitividad de los LVDTs es mayor a la de las galgas de deformación. Instrumentación-Jorge Marquez CCADET 2013 26 Sensores Capacitivos Figure 2.8 Capacitance sensor for measuring dynamic displacement changes Instrumentación-Jorge Marquez CCADET 2013 27 Sensores Capacitivos Capacitancia entre dos placas paralelas de área A separadas por distancia x: C 0 r A x 0 es la constante eléctrica en espacio libre (8.8 10-12 Farads/m) r es la constante eléctrica relativa del aislante (en el aire, es 1.0). Lo más sencillo es cambiar la separación entre placas. La sensitividad es: K C A 0 r 2 x x Se puede obtener una expresión que muestra que el % de cambio en C torno a cualquier punto neutro es igual al cambio en x por unidad (pequeños desplazamientos),j dC C dx x o: dC dx C x Instrumentación-Jorge Marquez CCADET 2013 28 Para un micrófono, con un circuito excitado por corriente DC, v1=E. Un cambio en posición x = x1-x0 produce un cambio en voltaje v0 = v1-E. E La salida Vo se relaciona con x1 por: Vo ( j ) ( E / x0 ) j A , con RC R 0 r X 1 ( j ) j 1 x0 Es un filtro pasa-altas. Dicho micrófono, permite detectar presión acústica para sonidos con frecuencia mayor a 20Htz. Sin embargo muchas señales fisiológicas tienen componentes de baja frecuencia relativa (respiración, ritmo it cardiaco di y otros t movimientos i i t d l corazón, del ó presión ió del d l pie i all andar, d etc.). Diversos materiales permiten aumentar la capacitancia, permitiendo medir frecuencias bajas ( RC grande). Instrumentación-Jorge Marquez CCADET 2013 29 Ejemplo 1: Para un sensor de capacitancia de 1 cm2, R es de 100 M. Calcular x, o sea el espaciamiento entre placas requerido q ppara ppasar frecuencias de sonido superiores p a 20 Hz. Solución: A partir de la frecuencia de corte (1/RC), tenemos C= 1/2fR = 1/(220 108) = 80pF. C 80pF El espaciamiento x se calcula dado C de: x 0 r 12 4 A (8.854 10 )(110 ) 5 1.11 10 m 11.1m 12 C 80 10 Instrumentación-Jorge Marquez CCADET 2013 30 Sensores Piezoeléctricos • Medición de desplazamientos fisiológicos y sonidos cardiacos • Esfuerzo mecánico en material piezoeléctrico produce un potencial eléctrico • No confundir con sensores piezorresistivos (el esfuerzo cambia resistividad) Para un piezoeléctrico ideal (resistencia de fuga infinita), la carga total inducida es p proporcional p a la fuerza aplicada: p q = kff donde k es la constante piezoelétrica del material (cristal) en Coulombs/Newton (C/N). El cambio en voltaje es: kf kfx v C 0 r A Para un piezoeléctrico real, se debe considerar, sobretodo para señales AC: • • • Capacitancias del circuito (cables (cables, elementos y C debida a la geometría) y del instrumento de medición (impedancia de entrada; depende de frecuencia de entrada: x(t)). Resistencia de fuga del elemento piezoeléctrico del orden de 100M. Inductancias del circuito (cables, etc.) y del instrumento de medición. Instrumentación-Jorge Marquez CCADET 2013 31 Figure 2.9 (a) Equivalent circuit of piezoelectric sensor, where Rs = sensor leakage resistance, Cs = sensor capacitance, Cc = cable capacitance, Ca = amplifier input capacitance, Ra = amplifier input resistance and q = charge resistance, generator. (b) Modified equivalent circuit with current generator replacing charge generator. (From Measurement Systems: Application and Design, by E. O. Doebelin. Copyright 1990 by McGraw-Hill McGraw Hill, Inc. Inc Used with permission of McGraw-Hill Book Co.) See errors in figs. (a) & (b) in [Webster] editions 2010. x e Amplifier Cable Crystal Amplifier + Charge generator q = Kx K Rs Cs Cc Ca Ra iAmplifier = 0 o (a) Amplifier impedance i a= 0 is iC Current generator is = Kdx/dt C iR R + o R = Ra Rs /(Ra+ Rs ) < Ra C = Cs + Cc + Ca (b) Instrumentación-Jorge Marquez CCADET 2013 32 Características de respuesta dinámica como filtro RC (Figura 2.9): Generador de carga q definida por : q Kx K Donde K es una constante de proporcionalidad y x es la deflexión Simplifcamos el análisis al convertir el modelo de generador de carga en generador de corriente is: is dq dx K dt dt Como ya consideramos en la C y R netas la impedancia del amplificador, este no toma ninguna corriente (ia = 0) y obtenemos: is iC iR is iR C además: dv0 dx v0 K dt dt R v0 vC de donde: 1 i dt CC V0 ( j ) K s j X ( j ) j 1 Con Ks =K/C la sensitividad en Volts/m, y = RC la constante de tiempo Instrumentación-Jorge Marquez CCADET 2013 33 Ejemplo 2. Un sensor piezoeléctrico tiene una capacitancia C=500 pF. La resistencia de fuga (leakage) del sensor es de 10G. La impedancia p de entrada del amplificador p es de 5M. Solución: Del circuito equivalente de la figura 2.10(b), vemos que R = Ra Rs /(Ra+ Rs ) Ra, pues en este caso Rs Ra . Obtenemos: f c 1/ (2 RC ) 1/ [2 (5 106 )(500 1012 )] 64Hz Al aumentar la impedancia del amplificador por un factor de 100, y la frecuencia de corte (low-corner ( frequency) y) a 0.54 Hz disminuye Nota: se omite en el Webster la aproximación aproximación, y en figura debe usarse ““”” Instrumentación-Jorge Marquez CCADET 2013 34 *Ejemplo 3. Para un sensor piezoeléctrico con un cable cuya capacitancia es de C=1nF (nano Farad), diseñar un amplificador de voltaje (no de carga) usando sólo un amplificador inversor con una ganancia de 10. 10 Debe poder manejar una carga Q de 1C (micro-Coulomb), que será generado por el pulso de la carótide, sin saturación. No debe derivar (drift) hacia saturación debido a las corrientes de polarización (ver tema de Opamps). Debe tener una respuesta en frecuencia de 0.05 a 100 Hz. Agregar el mínimo de componentes extras para conseguir las especificaciones de diseño. diseño Solución: El voltaje se obtiene de V = Q/C = 1 C/1 nF = 1 kV. Como es muy alto, se agrega un capacitor de shunt* Cs = 1 F para alcanzar solo 1.0V. Esto permite una ganancia i de d 10. 10 Para P alcanzar l una frecuencia f i de d corte t baja, b j se agrega una resistencia i t i de shunt Rs = 1/(2fcCs) = 1/(2(0.05)(1 F ) = 3.2 M (Notar omisión de subíndice en Cs en Webster). Para alcanzar una ganancia de +10 en un amplificador no-inversor, se selecciona una resistencia de feedback Rf = 10 k y una de entrada Ri = 1.11 k y, fi l finalmente, t un capacitor it de d feedback f db k Cf que para la l frecuencia f i de d corte t alta lt (100 Hz) H ) ell cuál tiene un valor igual a: Cf = 1/(2fcRf) = 1/(2(100 Hz)(10 k) = 160 nF. Notas: Para resolver este problema, ver antes tema de Amplificadores Operacionales. (*) Un U shunt h t es un dispositivo di iti (v.g. ( una impedancia) i d i ) que permite it pasar una corriente i t eléctrica lé t i por otra parte del circuito; es una especie de “corto-circuito”; también permite filtrar ruido; una resistencia shunt Rs en paralelo con otra R disminuye el valor neto; una constante RC se puede modificar al agregar una Cs o una Rs de shunt en los puntos apropiados. Tarea moral: Haga el diagrama del circuito de este sensor mas el amplificador de voltaje noinversor, identificando todas las componentes mencionadas. Instrumentación-Jorge Marquez CCADET 2013 35 Ejemplo 4. Retomando el ejemplo 2, tenemos un sensor piezoeléctrico con una capacitancia Cpiezo =500 pF, resistencia de fuga de 10G y la impedancia de entrada del amplificador es de 5M. Calcular el valor de capacitancia de shunt que se debe agregar para extender la frecuencia de corte baja a 0.05 Hz, tal como se requiere para detectar las formas de onda de pulsos. ¿Cómo cambia la sensitividad? Solución. Tenemos fc = 0.05 Hz = 1/(2RCequivalente), donde, al agregar en paralelo una capacitancia de shunt, tenemos: Cequivalente = 1/(2R fc) = 0.637 10-66 F = Cpiezo+ Cshunt de donde Cshunt= 0.636F = 636 nF mientras que Cpiezo=500 pF = 0.5 nF. La carga (fija) es Q = CV, y la capacitancia C aumenta por un factor de 636 nF/0.5 nF = 1272 veces. La sensitividad del voltaje V disminuye en 1/1272. O sea que la sensitividad decrecerá por un factor de 1272 debido al incremento en la capacitancia equivalente. Instrumentación-Jorge Marquez CCADET 2013 36 Mechanical resonance Output voltage Input force Lm Cm Cs Rt Rm Usable range fc (a) Frequency (b) *Figure 2.11 (a) High-frequency circuit model for piezoelectric sensor. Rs is the sensor leakage resistance and Cs the capacitance. Lm, Cm, and Rm represent the mechanical h i l system. (b) Piezoelectric Pi l i sensor frequency f response. (From (F T Transducers d for Biomedical Measurements: Application and Design, by R. S. C. Cobbold. Copyright 1974, John Wiley and Sons, Inc. Used by permission of John Wiley and Sons,, Inc.)) Instrumentación-Jorge Marquez CCADET 2013 37 Fin de notas SensoresBasicos.ppt Instrumentación-Jorge Marquez CCADET 2013 38 Instrumentación-Jorge Marquez CCADET 2013 39 XXXXXX Puente de Wheatstone El puente de Wheatstone es un circuito diseñado para encontrar la resistencia (o en general la impedancia) de un componente sabiendo la de otros tres componentes. Para un voltaje de entrada Vin dado: C A Vin VABC VADC I ABC ( R1 R2 ) I ADC ( R4 R3 ) D La diferencia de p potencial entre AB y AD es: B VAB I ABC R1 VAD I ADC R4 Instrumentación-Jorge Marquez CCADET 2013 Vin R1 R2 Vin R4 R3 R1 R4 40 Cálculo de la resistencia desconocida El voltaje Vg puede obtenerse de: Vg VAB VAD Vin R1 R2 R1 Vin R4 R3 R4 R1 R3 R2 R4 Vin ( R1 R2 )( R4 R3 ) Suponemos que todas las resistencias pueden cambiar durante la medición. Entonces el cambio en el voltaje leído será: Vg Vg ( R1 R1 )( R3 R3 ) ( R2 R2 )( R4 R4 ) ( R1 R1 R2 R2 )( R4 R4 R3 R3 ) Instrumentación-Jorge Marquez CCADET 2013 Vin 41 Balance del circuito de Puente de Wheatstone • Si el puente esta inicialmente balanceado, el voltaje inicial Vg debería ser cero. R1 R3 R2 R4 Vg Vin 0 ( R1 R2 )( R4 R3 ) • • Entonces: R1 R4 1 R1 R3 R2 R4 o sea: R2 R3 r r R1 R2 R3 R4 Vg (1 )Vin 0 2 R2 R3 R4 (1 r ) R1 Y esta definida p por: 1 (1 r ) 1 R1 R4 R2 R3 r R1 R4 R R 3 2 Instrumentación-Jorge Marquez CCADET 2013 42 Cuando los cambios en la resistencia son pequeños (<5%), (<5%) el segundo término , es aproximadamente cero y puede ser ignorado, entonces: r R1 R2 R3 R4 Vin Vg 2 R2 R3 R4 (1 r ) R1 El coeficiente r/(1+ r)2 es llamado eficiencia de circuito. En la práctica regularmente se usa el mismo valor para las cuatro resistencias R1=R2=R3=R4=R. Notemos entonces que r =1 en este caso, y el cambio en el voltaje será: R1 R2 R3 R4 Vg Vin 4R Instrumentación-Jorge Marquez CCADET 2013 43