TEMA 9 ESTABILIDAD ESTÁTICA LONGITUDINAL
Anuncio

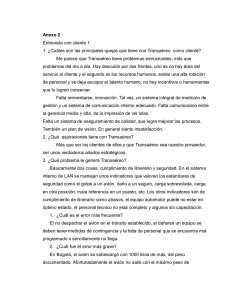
ETSEIAT (UPC) Mecánica del Vuelo (06-07) TEMA 9 ESTABILIDAD ESTÁTICA LONGITUDINAL 9.1. INTRODUCCIÓN A partir de este tema se estudiarán la estabilidad y controlabilidad del avión, es decir, los cambios de actitud como sólido rígido alrededor de su centro de masas, y se comenzará el estudio por la estabilidad y la controlabilidad puramente estáticas. Se ha supuesto que el avión tiene un plano de simetría (el plano xb-zb) y por tanto sus movimientos pueden descomponerse en dos grandes categorías: • Movimiento longitudinal: Todas las variables lateral-direccionales del problema son idénticamente nulas (β, φ, p, r, δa, δr), por lo que las tres ecuaciones dinámicas lateral-direccionales (una de fuerza según el eje yb, perpendicular al plano de simetría, y dos de momentos según los ejes xb y zb, que conforman el plano de simetría) son idénticamente nulas, y sólo han de plantearse dos ecuaciones dinámicas de fuerzas (según los ejes xb y zb) y una ecuación dinámica de momentos (según el eje yb). • Movimiento lateral-direccional: Alguna de las variables lateral-direccionales del problema no es idénticamente nula, por lo que hay que plantear las tres ecuaciones dinámicas lateral-direccionales, además de las longitudinales. Otra hipótesis adicional habitual para comenzar estos estudios consiste en suponer el avión en vuelo de planeo o, lo que es el mismo, suponer que el empuje del avión pasa por su centro de masas. 9.2. SUSTENTACIÓN TOTAL La sustentación y el momento de cabeceo totales de un planeador pueden obtenerse a partir de las contribuciones de las distintas partes y de las interferencias, siendo estas contribuciones funciones lineales del ángulo de ataque Un planeador, desde un punto de vista longitudinal, está constituido por el conjunto ala-fuselaje y la cola horizontal, y las acciones aerodinámicas a considerar son (ver Figura 9.1): • Conjunto ala-fuselaje: Lwb , Dwb , M acwb ≠ f (α wb ) • Cola horizontal: Lt , Dt , M act ≠ f (α t ) Además hay que tener en cuenta dos efectos de interferencia del ala sobre la cola horizontal: • Deflexión de estela, ε , que es la disminución en el ángulo de ataque de la cola horizontal, debida a la velocidad inducida por los torbellinos desprendidos del ala M.A. Gómez Tierno (ETSIA/UPM) 1 ETSEIAT (UPC) Mecánica del Vuelo (06-07) • Eficiencia aerodinámica de la cola, ηt (η t = qt / q ), debida a la reducción de velocidad de la corriente libre que llega a la cola por estar inmersa en la estela del ala La Figura 9.1 representa las velocidades sobre el conjunto ala-fuselaje y sobre la cola horizontal, la geometría a considerar y las fuerzas y momentos que actúan en el plano de simetría del avión, todo ello referido a una la línea de referencia del fuselaje (LRF). Según esto, la sustentación, la resistencia, el coeficiente de sustentación y el coeficiente de resistencia del avión completo pueden escribirse como: L = Lwb + Lt cos ε − Dt sin ε D = Dwb + Dt cos ε + Lt sin ε L S = C Lwb + CLtηt t cos ε − CDtηt qS S D S CD = = CDwb + CDtηt t cos ε + CLtηt qS S CL = St sin ε S St sin ε S Para calcular el coeficiente de sustentación de un avión convencional es usual utilizar las hipótesis de que ε << 1 y que C Dt << CLt . Así pues: C L = C Lwb + C Lt ηt St S (9.1) Los coeficientes de sustentación del conjunto ala-fuselaje y de la cola horizontal son: C Lwb = awbα wb CLt = atα t α t = α wb − iwb + it − ε + τ eδ e ⎛ ∂ε ⎞ ⎟α wb ⎝ ∂α ⎠ ε = ε0 + ⎜ en donde awb y at son las pendientes de las curvas de sustentación del conjunto alafuselaje y cola horizontal, iwb e it son las incidencias o calados de las líneas de sustentación nula del ala-fuselaje y de la cola horizontal respecto de una línea de referencia del fuselaje, τ e es la efectividad del timón de profundidad, y ε 0 y (∂ε ∂α ) son características aerodinámicas conocidas dependientes, respectivamente, de la torsión aerodinámica del ala y de la intensidad de los torbellinos desprendidos por el ala. Introduciendo estas últimas expresiones en la ecuación (9.1) queda finalmente: CL = CL 0 + CLαα wb + CLδ e δ e M.A. Gómez Tierno (ETSIA/UPM) 2 ETSEIAT (UPC) Mecánica del Vuelo (06-07) St (it − iwb − ε 0 ) S ∂ε S CLα = awb + atηt t (1 − ) S ∂α S CLδ e = atηt t τ e S C L 0 = atηt Siempre es posible cambiar el origen de los ángulos de ataque, por lo que el modelo lineal anterior es válido para otros orígenes. Por ejemplo, si se miden ángulos de ataque respecto de la línea de referencia del fuselaje: α b = α wb − iwb CL = CL′ 0 + CLαα b + CLδ e δ e CL′ 0 = CL 0 + CLα iwb 9.3. MOMENTO DE CABECEO TOTAL Utilizando de nuevo la Figura 9.1 y proyectando las fuerzas existentes según las direcciones normal y paralela a la LRF se obtienen las fuerzas normales y axiales del conjunto ala-fuselaje, N wb y Cwb , y de la cola horizontal, N t y Ct : N wb = Lwb cos(α wb − iwb ) + Dwb sin(α wb − iwb ) Cwb = − Lwb sin(α wb − iwb ) + Dwb cos(α wb − iwb ) N t = Lt cos(α t − it ) + Dt sin(α t − it ) Ct = − Lt sin(α t − it ) + Dt cos(α t − it ) Tomando ahora momentos aerodinámicos alrededor del centro de masas: M A = N wb xa + C wb z a + M acwb − N t lt + Ct zt + M act Para adimensionalizar los momentos de cabeceo se utilizan usualmente la presión dinámica de la corriente libre, q, la superficie alar, S, y la cuerda media aerodinámica, c: CmA = MA Sz Sc = CNwb xˆa + CCwb zˆa + Cmacwb − CNtVˆtηt + CCtηt t t + Cmactηt t t qSc Sc Sc en donde se denomina coeficiente de volumen de la cola horizontal a: Sl Vˆt = t t Sc y se han introducido dos distancias adimensionales mediante: xˆa = xa c , zˆa = za c M.A. Gómez Tierno (ETSIA/UPM) 3 ETSEIAT (UPC) Mecánica del Vuelo (06-07) Suponiendo además que: C Nwb ≅ C Lwb , CCwb ≅ −CLwb (α wb − iwb ) + CDwb C Nt ≅ CLt , CCt ≅ −C Lt (α t − it ) + C Dt se obtiene: CmA = C Lwb ( xˆcg − xˆacwb ) + Cmacwb − C LtVˆtηt En la anterior expresión x̂cg y x̂acwb son las posiciones del centro de masas del avión y del centro aerodinámico del conjunto ala-fuselaje, medidas según la línea de referencia del fuselaje, a partir de un punto genérico de la misma (morro del avión, borde de ataque del ala, etc.), positivas hacia atrás y adimensionalizadas con la cuerda media aerodinámica c. Introduciendo en la última expresión los valores de C Lwb y C Lt obtenidos en el apartado anterior: CmA = Cm 0 + Cmα α wb + Cmδ e δ e donde Cm 0 = Cmacwb − atηtVˆt (it − iwb − ε 0 ) ∂ε Cmα = awb ( xˆcg − xˆacwb ) − atηtVˆt (1 − ) ∂α Cmδ e = − atηtVˆtτ e En esta expresión lineal del coeficiente de momento de cabeceo aerodinámico aparecen dos coeficientes aerodinámicos que tienen nombre propio: • Cmα ≡ Índice de estabilidad estática longitudinal con mandos fijos (frente a perturbaciones en ángulo de ataque y a factor de carga constante), que se estudiará en siguiente apartado. • Cmδ e ≡ Potencia de control longitudinal (ver siguiente tema). 9.4. ÍNDICE DE ESTABILIDAD ESTÁTICA LONGITUDINAL CON MANDOS FIJOS Y PUNTO NEUTRO CON MANDOS FIJOS El concepto físico intuitivo de un avión estable frente a perturbaciones en ángulo de ataque establece que debe generarse un momento de cabeceo que vaya contra la perturbación, es decir, para un incremento positivo del ángulo de ataque debe aparecer un momento negativo. Como se está estudiando un avión no motorizado (planeador): ⎛ ∂C ⎞ ⎛ ∂Cm ⎞ ⎜⎜ ⎟⎟ = Cmα = ⎜⎜ mA ⎟⎟ ⎝ ∂α wb ⎠δ e , n ⎝ ∂α wb ⎠δ e , n M.A. Gómez Tierno (ETSIA/UPM) 4 ETSEIAT (UPC) Mecánica del Vuelo (06-07) y, por tanto, a Cmα se le denomina “Índice de estabilidad estática longitudinal con mandos fijos” (frente a perturbaciones en ángulo de ataque y a factor de carga constante) y su signo dará idea de la estabilidad estática del planeador: Cmα < 0 → Cmα = 0 → Cmα > 0 → Avión ESTABLE Avión INDIFERENTE Avión INESTABLE La Figura 9.2 representa las cuatro posibles rectas de CmA en función de α wb para δ e = 0 . Téngase en cuenta que sólo es posible volar en equilibrio de momentos y con α wb > 0 en el punto A (rectas 2 y 3) y que, de éstas, sólo la recta 2 garantiza un planeador estable. Se denomina Punto Neutro con Mandos Fijos, N 0 , a la posición del centro de masas (adimensionalizada con la cuerda media aerodinámica) que anula Cmα : N 0 = ( xˆcg )C mα = 0 at ∂ε ηtVˆt (1 − ) awb ∂α = awb ( xˆcg − N 0 ) N 0 = xˆacwb + Cmα en donde se ha supuesto lt = cte . El punto neutro representa la posición más retrasada que puede ocupar el centro de masas para que el avión sea estáticamente estable con mandos fijos, frente a perturbaciones en ángulo de ataque y en vuelo a factor de carga constante (Figura 9.3). Se denomina Margen Estático con Mandos Fijos, H 0 , a: H 0 = N 0 − xˆcg Cmα = − awb H 0 , Un avión estable tiene un margen estático con mandos fijos positivo y uno inestable, negativo. M.A. Gómez Tierno (ETSIA/UPM) 5 ETSEIAT (UPC) Mecánica del Vuelo (06-07) FIGURA 9.1. Fuerzas y momentos aerodinámicos de un planeador en vuelo longitudinal. FIGURA 9.2. Casos que pueden presentarse para el momento de cabeceo. FIGURA 9.3. Punto neutro con mandos fijos. M.A. Gómez Tierno (ETSIA/UPM) 6