20080424-Control.pdf
Anuncio

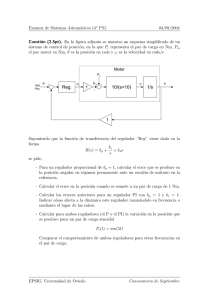
Prueba de evaluación continua de Sistemas Automáticos 24 de abril de 2008 Problema. Se pretende diseñar el sistema de control de la posición (x, y) del cabezal de impresión y soldadura de un circuito impreso. El sistema dispone de dos sistemas de control gemelos, uno para el eje x y otro para el eje y, con realimentación de la posición unitaria (1 V/cm) e instantánea proporcionada por sendos encoders, tal como se muestra en la figura: Servo x Servo y di (t) di (t) Controlador rx (t) + - Motor + + C(s) ui (t) Controlador ry (t) x(t) G(s) + - Motor + + C(s) ui (t) y(t) G(s) El cabezal está dotado de sistemas independientes que permiten insertar un punto de soldadura o inyectar material conductor para el trazado de las pistas del circuito a partir de señales del microcontrolador (µC). El conjunto del motor y la transmisión mecánica de cada servo tiene la siguiente función de transferencia, que relaciona la tensión en voltios de inducido ui (t) y la coordenada x(t) o y(t) del cabezal, ambas expresadas en cm. 1 + 200 s Durante el proceso de diseño se ensayan dos controladores C1 (s) = 5 y C2 (s) = 1,5 · s+66,7 . s Los Bodes de magnitudes de las funciones de sensibilidad para ambos controladores son los siguientes: G(s) = 5000 · s2 T = L/(1+L) 20 0 0 Amplitud (dB) Amplitud (dB) S = 1/(1+L) 20 −20 C1 −40 −20 C1 −40 C2 −60 −1 10 0 10 1 2 C2 −60 −1 10 3 10 10 Frecuencia (rads/s) 10 0 10 S = D/(1+L) 2 i 20 0 0 Amplitud (dB) 20 −20 C −40 −20 C −40 1 1 C2 −60 −1 10 0 10 1 3 10 S = G/(1+L) u Amplitud (dB) 1 10 10 Frecuencia (rads/s) 2 10 10 Frecuencia (rads/s) C2 3 10 −60 −1 10 0 10 1 2 10 10 Frecuencia (rads/s) 3 10 Prueba de evaluación continua de Sistemas Automáticos 24 de abril de 2008 Prueba de evaluación continua de Sistemas Automáticos 24 de abril de 2008 DNI: Nombre: Apellidos: Contestar a las siguientes preguntas, razonando brevemente en el espacio indicado el porqué de todas las respuestas (nota: las distancias y posiciones están expresadas en cm): Suponer que la máquina se programa para llevar el cabezal a la posición de referencia r = (1, 1) y tras un tiempo suficiente (hasta que el cabezal se detenga) se inserta el punto de soldadura. Indicar para los dos casos (usando para los dos servos el controlador C1 y usando para los dos servos el controlador C2 ) si la máquina ubica sin error el punto de soldadura. En caso de haber error, calcular a qué distancia respecto a la posición de referencia pone la soldadura. Se desea ahora poner puntos de soldadura en las posiciones (1, 1), (2, 2), · · · , (10, 10) sin tener que esperar cada vez a que se detenga el cabezal. Para ello el µC envı́a a los servos la siguiente trayectoria de referencia r(t) = (rx , ry ) = (t, t) además de una señal de soldadura en los instantes t = 1, 2, 3, · · · , 10 segundos. ¿Ubicarı́a la máquina los puntos de soldadura en las posiciones deseadas?. Si no es ası́, calcular a qué distancia pondrı́a las soldaduras respecto a las posiciones de referencia. Prueba de evaluación continua de Sistemas Automáticos 24 de abril de 2008 Indicar cuál de los dos sistemas de control podrı́a ejecutar con más precisión trayectorias de referencia circulares de 1 cm de diámetro a un ritmo de 10 circunferencias por segundo. Calcular para ambos controladores el diámetro aproximado de las circunferencias que describirı́a realmente. ¿Cuál de los dos sistemas de control posee una mayor estabilidad relativa?. ¿Cuál de los dos sistemas de control es más rápido?. Supóngase que las fuerzas externas ejercidas sobre el cabezal pueden modelarse como una perturbación di (t) a la entrada del motor. Asumiendo una posición de referencia fija r = (1, 1), indicar para ambos controladores: a) si variarı́a posición del cabezal ante una fuerza constante; b) si variarı́a la posición del cabezal en presencia de fuerzas inerciales provocadas al someter a la máquina a una vibración de 10 Hz; c) en caso de que las variaciones sean diferentes, indicar para qué controlador son menores. Indicar cuál de los dos sistemas de control demandarı́a tensiones más altas a los motores si la máquina se programara para etiquetar el circuito impreso a un ritmo de más de 30 caracteres por segundo.