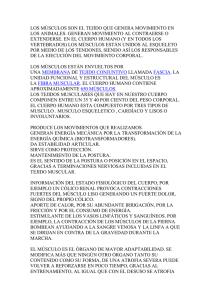
Figura 1. Bulbos sinápticos terminales
Anuncio

PROTOTIPO DE PROTESIS PARA MANO UTILIZANDO MUSCULOS DE ALAMBRE (NITNOL) PARA LA GENERACIÓN DE MOVIMIENTO Andrea Aparicio G., Luis Alejandro Caicedo D., José E. Cuy C. Universidad Santo Tomás de Aquino Bogotá, Mayo de 2004 E-MAIL: [email protected] Resumen: El proyecto consiste en capturar los biopotenciales que se encuentran en el antebrazo de la persona amputada a la altura de la muñeca, para ser amplificados, procesados y obtener una señal equivalente a la entregada por el cuerpo en la realización de apertura y cierre que sirve para accionar el modelo mecánico. 1. INTRODUCCIÓN En el campo investigativo actual, se está buscando que la persona discapacitada recupere en lo posible el uso pleno de sus capacidades físicas, para desarrollar plenamente las actividades cotidianas; debido a esto, ramas como la electromedicina, la bioingeniería, la biomedicina y la mecatrónica, entre otras, son disciplinas que al interactuar conjuntamente llevan a ese proceso de desarrollo científico. Debido a lo anterior desde 1998 se ha venido trabajando en el transplante1 y adecuación de prótesis para personas amputadas. Algunas universidades como la Escuela Colombiana de Ingeniería, la universidad de los Andes, la Universidad Distrital, la Universidad Javeriana en Bogotá, han adelantado estudios referentes a este tema y han trabajado varios prototipos de estas prótesis. Teniendo en cuenta que el prototipo de prótesis que se quiere realizar va dirigida a personas a las cuales se les ha amputado su miembro superior (mano), 1 http://www.eside.deusto.es/asignaturas/TiM/Trabs1999/A13/Si stemasVR.htm se debe hacer un estudio previo para saber qué potenciales siguen activos y tomar las muestras, es decir, el cerebro conserva el engrama (mapa motor) para el movimiento de la misma (lo cual no ocurre cuando la persona nace sin este miembro superior) de tal forma que lo que se quiere aprovechar es este efecto y poder realizar una realimentación, ésta con el fin de conservar indefinidamente la conexión con el cerebro. 2. PLANTEAMIENTO DEL PROBLEMA El problema esencial es cómo compensar, en lo posible, la falta de la extremidad superior en personas que han sido amputadas de la extremidad a la altura de la muñeca y de esta forma, mejorar la calidad de vida de éste tipo de discapacitados. 3.OBJETIVOS 3.1. OBJETIVO GENERAL: Diseñar y construir un prototipo de prótesis mioeléctrica para mano utilizando músculos de alambre (NITINOL) los cuales serán activados por los biopotenciales generados en el antebrazo del paciente, previamente filtrados y amplificados, además 1 aprovechando la realimentación visual, para permitir con ello que se mantenga el engrama2 cerebral (memoria, mapa motor) de la parte motriz que se encarga de los movimientos de la mano. indispensable que resulta contracción y la relajación músculos. de la de los 4.1.1. Características 3.2. OBJETIVOS ESPECIFICOS: * Diseñar el prototipo con función de pinza (agarre), para lograr apertura y cierre voluntario, a través del filtrado y amplificación de los biopotenciales tomados del antebrazo del paciente amputado. El tejido muscular tiene cuatro características principales que son de suma importancia para la conservación de la homeostasia3. 1. Excitabilidad: Es la capacidad del tejido para recibir estímulos y responder a ellos. 2. Contractilidad: Es la capacidad de acortarse y engrosarse o contraerse cuando se recibe un estímulo de intensidad suficiente. 3. Extensibilidad: Es la capacidad del tejido muscular de dejarse estirar o extender. 4. Elasticidad: Es la capacidad de los músculos para recuperar su forma original después de su contracción o extensión. * Aprehensión de objetos hasta de ½ lb de peso. * Adecuar los músculos de alambre (NITINOL), para la generación del movimiento del prototipo. * Utilización de pila portátil y recargable. 4. MARCO TEORICO Para la realización del prototipo es necesario hacer un estudio de los biopotenciales que se encuentran en los músculos del antebrazo, también del sistema a trabajar, en este caso, un DSP de la familia 2000 de la Texas Instruments, otro del comportamiento de la potencia consumida por el músculo de alambre (nitnol) y por último la adaptación del músculo de alambre al modelo mecánico. 4.1. SISTEMA MUSCULAR: Los huesos y las articulaciones generan acción de palanca y constituyen las estructuras de sostén del cuerpo pero no mueven a este por sí solos. El movimiento es una función corporal 2 Gracias a la contracción los músculos llevan a cabo tres funciones importantes: Movimiento, conservación de la postura y producción de calor. 4.1.2. Unión Neuromuscular (Placa Motora Terminal) La contracción de una fibra de músculo estriado entraña obligadamente la aplicación de un estímulo a ella, el mismo que proviene de una neurona y precisamente la que estimula el tejido muscular, son las neuronas motoras. Una vez que entra en el músculo, el axón o cilindro eje de una neurona motora se ramifica en terminaciones (telodendrones) entran en íntimo 3 Homeostasia: Homeostasis: Tendencia al equilibrio o estabilidad orgánica en la conservación de las constantes fisiológicas. http://www.bmd.com.ar/Consulta_Neuro06.htm 2 contacto con surcos presentes en la membrana de la célula muscular (sarcolema). Los términos unión neuromuscular y placa motora terminal denotan la terminal axónica de la neurona motora, junto con la porción de sarcolema de la fibra muscular que está en íntima relación con dicha terminal. El análisis microscópico de la unión neuromuscular indica que los extremos distales de las terminales axónicas se expanden en estructuras semejantes a bulbos llamadas bulbos sinápticos terminales (FIGURA 1). Los bulbos contienen sacos envueltos por membranas, las vesículas sinápticas, en que están almacenadas sustancias químicas, los neurotransmisores de las que depende si un impulso nervioso viaja a un músculo, una glándula u otra neurona. El espacio entre la terminal axónica y el sarcolema es la hendidura sináptica. 4.1.3. Impulsos Nerviosos A. Potenciales de Membrana Cuando una neurona no conduce un impulso, a través de su membrana pasan activamente iones. Los iones de sodio son transportados activamente al exterior dela célula y los de potasio en sentido contrario, es decir, al interior. El sistema celular por el cual los iones de sodio y potasio son transportados en forma activa simultáneamente recibe el nombre de bomba de sodio-potasio FIGURA 2. Figura 2. Diagrama de la bomba de sodio-potasio Figura 1. Bulbos sinápticos terminales Cuando un impulso nervioso (potencial de acción) llega a una terminal axónica desencadena una secuencia de reacciones que liberan moléculas del neurotransmisor, de las vesículas sinápticas (y posiblemente también del citoplasma). El neurotransmisor liberado de las uniones neuromusculares es la acetilcolina (ACh) que una vez liberada difunde por la hendidura sináptica y se combina con los sitios receptores del sarcolema. La combinación modifica la permeabilidad del sarcolema y ello culmina en la generación de un impulso nervioso que viaja por dicha membrana y así se inician los fenómenos que originan la contracción. En la FIGURA 3 se señala un esquema de los cambios eléctricos que ocurren con un impulso nervioso. Figura 3. Descripción de la generación del potencial de acción. 3 B. Ley de Todo o Nada Cualquier estímulo de intensidad suficiente para desencadenar un impulso nervioso recibe el nombre de estímulo umbral (o liminal). Una sola neurona, a semejanza de una fibra muscular, transmite impulsos conforme a la ley de todo o nada: si el estímulo tiene la intensidad suficiente para generar el potencial de acción, se transmite en toda la longitud de la neurona con una intensidad constante y máxima en las circunstancias prevalecientes. 4.2. ELECTROMIOGRAMA (EMG) Los potenciales bioeléctricos asociados con la actividad muscular constituyen el electromiograma (EMG). Esos potenciales se pueden medir en la superficie del cuerpo cerca del músculo de interés o directamente en el músculo atravesando la piel con el electrodo de aguja. La señal es generalmente una suma de los potenciales de acción individuales de las fibras que constituyen el músculo o músculos donde se mide. Igual que en el EEG, los electrodos de EMG recogen potenciales de todos los músculos dentro de su alcance. Tal como se ha visto el potencial de acción de un músculo determinado (o fibra nerviosa) tiene una magnitud fija, independientemente de la intensidad del estímulo que genera la respuesta. Así, en un músculo, la intensidad con que actúa no incrementa la altura neta del impulso del potencial de acción sino que incrementa el ritmo con que se dispara cada fibra muscular y el número de fibras que se activan en un instante determinado. De este modo la señal EMG se parece mucho a un ruido aleatorio, siendo la energía de la señal función de la cantidad de actividad muscular y de la situación de los electrodos. En la FIGURA 4 se muestran las formas de onda de EMG típicas. Figura 4. Forma de onda típica de un EMG Las amplitudes de pico varían desde 50uV hasta alrededor de 1mV, dependiendo de la situación de los electrodos de medida con respecto al músculo y de la actividad de éste. Para una reproducción fiel se requiere una respuesta frecuencial alrededor de 10 Hz a 300 Hz. 4.3. MIOLOGIA DEL ANTEBRAZO Los músculos del antebrazo están dispuestos en tres regiones: región anterior, región externa y región posterior. Región Anterior del Antebrazo: Flexor común superficial de los dedos: Músculo aplanado superficial muy ancho, situado por debajo de los músculos precedentes; va a terminar en los cuatro últimos dedos. Acción: Dobla la segunda falange sobre la primera. Accesoriamente flexiona la mano sobre el antebrazo. Flexor común profundo de los dedos: Constituye el tercer plano muscular del antebrazo y se extiende desde el antebrazo a la tercera falange de los dedos. 4 Acción: Dobla la tercera falange sobre la segunda y accesoriamente la mano sobre el antebrazo. Flexor largo propio del pulgar: situado por fuera del precedente, se extiende desde el radio al pulgar. Acción: Flexiona la segunda falange del pulgar sobre la primera, accesoriamente la primera sobre el primer metacarpiano. Filtros FIR: un sistema FIR tiene una respuesta impulsional que es cero fuera de un determinado intervalo finito. Son filtros recursivos, cuya función de Transferencia H(z) y su correspondiente ecuación diferencia y[n] son de la forma: 0 1 M 1 y n B x n B x n 1 B x n M 1 Ec.1 Region Posterior del Antebrazo: Extensor común de los dedos: Músculo carnoso por arriba y tendinoso por abajo, que va desde el epicóndilo a los cuatro últimos dedos. Acción: Extiende las falanges sobre la mano y ésta sobre el antebrazo. M 1 Hz h(k )z k k 0 Ec.2 Abductor largo del pulgar: Es el músculo más considerable y más extenso de la capa profunda. Acción: Dirige el pulgar hacia fuera y adelante. Accesoriamente coloca la mano en abducción. 4.4.TRATAMIENTO DIGITAL DE LA SEÑAL: Figura 5. Estructura del filtro FIR El tratamiento digital de la señal, comprende el análisis de filtros FIR, el análisis de la DFT con la FFT, para el procesamiento de la señal y el funcionamiento del DSP TMS320LF2407 de la Texas Instruments. 4.4.1 Concepto: Un filtro digital es la implementación en hardware o software de una ecuación en diferencia. Procesamiento realizado en una señal de entrada digital. Ventajas: *Alta inmunidad al ruido. *Alta precisión (limitada por errores de cuantización y redondeo). * Fácil modificación de las características del filtro. 4.4.2. SERIE DE FOURIER: La serie de Fourier es apropiada para representar una señal periódica como suma ponderada de componentes sinusoidales relacionados armónicamente mientras que los coeficientes de ponderación representan las amplitudes de cada uno de los armónicos, y la magnitud al cuadrado de cada coeficiente de ponderancias representa la potencia del armónico correspondiente. La transformada de Fourier: Se utiliza para el análisis frecuencial de una señal en tiempo discreto, entonces se convierte la secuencia en el dominio del 5 tiempo en una forma equivalente, en el dominio de la frecuencia. Como la transformada de fourier es una función continua de la frecuencia no es una forma computacionalmente conveniente, por tal motivo se utiliza la DFT o transformada discreta de fourier que consiste en tomar la señal de entrada y muestrearla o discretizarla (tomarla por puntos); para hacer este cálculo más eficaz se utiliza la llamada FFT o transformada rápida de fourier. El análisis para la FFT base –2 se puede realizar de dos formas: Diezmado en tiempo Diezmado en frecuencia La diferencia fundamental entre una y otra consiste en la forma de hacer la captura y análisis de la señal. En el diezmado en tiempo la señal de entrada es separada en sus componentes pares e impares permitiendo así que al terminar el proceso y empalmar los dos grupos la señal queda ordenada; es decir queda de manera contínua. En el diezmado en frecuencia la señal de entrada es separada en los primeros N/2 términos y en los segundos N/2 términos permitiendo así que al terminar el proceso y empalmar los dos grupos la señal de salida que en bit inverso, es decir, en un forma desordenada; por tal motivo al terminar este tipo de diezmado hay que aplicar lo que se llama el bit reverso para ordenar la señal de salida. Este es el sistema más utilizado por su velocidad en la realización. Figura 6. FFT diezmada en Tiempo 4.5. IC DSP TMS320LF2407: El TMS320LF2407 es un DSP de 16-bits de punto fijo que puede correr a una velocidad de 40MHz. Este DSP incluye los siguientes periféricos en el mismo encapsulado10: Una RAM de 16 K words Una ROM de 4 K words. 2 timers. Un controlador de Acceso Directo a Memoria (Direct Memory Access – DMA). Señales I/O de propósito general. Un generador de reloj (clock). Un generador de estados de espera (wait-state generator). Estructuración del DSP: Figura 7. Arquitectura del DSP 10 Para más información véase: TMS320LF/LC240xA DSP Controllers Reference Guide, (SPRU375B) Texas Instruments. 6 Figura 9. Memoria de Forma Figura 8. Diagrama de Bloques Para la programación directa del dispositivo montado en un sistema propio (diseñado fuera de un DSK o de un EVM), es necesario la utilización de un JTAG XDS510PP y el software de programación Code Composer. Es programado con un set de instrucciones en assembler y ANSI C. 4.6. Es la capacidad que tiene el alambre de poderse contraer según la cantidad de temperatura que se le coloque debido a su estructura cristalina. MÚSCULO DE ALAMBRE (NITINOL) Nitinol (un acrónimo para Nickel Titanium Naval Ordinance Laboratory) es una familia de materiales intermetálicos los cuales contienen una porción igual (en átomos) de Niquel y Titanio. Otros elementos pueden ser añadidos para ajustar las propiedades del material.. El Nitinol muestra una conducta única. Los dos términos utilizados para describirla son: “memoria de forma” y “superelasticidad”. 4.6.1 4.6.2. Super-Elasticidad Memoria de Forma La memoria de forma es el efecto que describe el proceso de volver a la forma original debido a una deformación por calentamiento. Figura 10. Superelasticidad 4.6.3. Ventajas de los Músculos de Alambre Las ventajas que tienen son muchas, si se comparan con los motores y los solenoides. Son de muy bajo peso, consumen poco espacio. pueden dar movimientos lineales, pueden ser minúsculos, tienen cierto grado de inteligencia... y lo mejor: son económicos. Para trabajarlo el músculo normalmente está estirado ( Por la acción de un peso o un resorte) y cuando se le aplica temperatura ( o una corriente) se contrae y lo hace con mucha fuerza, venciendo aún al resorte o subiendo el peso. 7 Dependiendo del calibre, el alambre puede manejar un peso considerable. Como el grueso de un cabello y con capacidad para levantar casi un kilo. Aunque pueden contraerse hasta un 8% de su longitud, cualquiera que sea, es mejor hacerlo hasta un 5%. El movimiento lineal se puede amplificar en movimientos angulares, con la utilización de las palancas. Se contraen extremadamente rápido: hasta 0.1 segundos. Para restituirse, se necesita garantizar la evacuación de calor en el músculo. 5. DISEÑO METODOLOGICO Para la realización del prototipo el desarrollo fue el siguiente: Teniendo en cuenta la teoría investigada referente a la ubicación de los músculos y sus características, el lugar adecuado para la colocación de los electrodos y capturara la señal es el músculo extensor común de los dedos y el abductor largo del pulgar. Figura11 Dos electrodos son colocados en el músculo extensor común de los dedos para generar las señales de entrada, el tercer electrodo es colocado en el abductor largo del pulgar para que este sirva como referencia de la señal. Figura 11. Ubicación de Electrodos digital. Se hicieron varias pruebas con un joven soldado discapacitado paciente del hospital militar, el cual sufrió amputación de mano a la altura de la muñeca. Las pruebas permitieron generar parámetros de comportamiento entre las señales obtenidas de personas amputadas y no amputadas. Los datos obtenidos en éste análisis, fueron procesados en computador con los paquetes de MATLAB y LABVIEW. La captura de las señales se realizó por medio de un amplificador de instrumentación (AD620), diseñado con una ganancia de 1000, debido a que los potenciales adquiridos están en el orden de los V. A la salida de éste, a la señal se le deja sobre 1V para darle una mejor estabilidad y dejarla acondicionada (señal sobre cero) para ingresar en el DSP. La señal fue procesada por el DSP, primero pasando por el conversor análogo digital para luego realizar el filtrado digital y la discriminación de frecuencias. Al salir del DSP, se utilizó un microcontrolador, que es el encargado de avisarle al músculo de alambre que se ha activado, además de servir de refrigerante para el mismo (tren de pulsos). Para separar los pulsos de control de la parte de potencia su utilizó un optoacoplador. Al activarse el músculo de alambre este empieza a contraerse logrando el movimiento deseado de apertura en el modelo mecánico, hasta que se detecte que la señal enviada por el paciente es de cierre. Se construyó un modelo de prótesis basado en uno ya existente de acción mecánica, reemplazando el juego de bandas de caucho – resorte por músculo de alambre – resorte. Se realizaron filtros análogos que permitieron definir exactamente las características necesarias en el filtrado 8 8. REFLEXIONES En el análisis de los biopotenciales sensados, tanto para una persona normal como para una persona amputada de mano, se observó que difieren en amplitud más no en frecuencia ni en forma de onda; siendo estos últimos los aspectos verdaderamente importantes para el reconocimiento y procesamiento de las señales mioeléctricas. La amplitud de la señal capturada difiere dependiendo del lugar donde se ubiquen los electrodos y la distancia que ahí entre ellos, por esto fue vital la colocación de los mismos siempre en los mismos puntos y a las mismas distancias aproximadamente. Ahí que tener en cuenta que la amplificación de la señal electromiográfica se debe realizar en una relación 1:3, en las personas amputadas debido a que no se tienen los biopotenciales normales sino se tiene un efecto fantasma, además se pretende mantener activo el engrama o mapeo de la memoria motora en el paciente. el que más se ajusta al trabajo que se va a realizar. Al iniciar el trabajo con éste dispositivo se encontró un vacío importante de información en lo que se refiere a la programación del mismo e implementación en un sistema propio (que no dependa de un DSK o EVM). Al momento de acoplar el DSP sobre un sistema propio, debido a su estructura física, se requiere de un tratamiento especial a la hora de soldar. Las pruebas necesarias en el módulo de procesamiento del proyecto no se pudieron llevar a cabo fácilmente por la poca accesibilidad del JTAG necesario para la programación. Otro inconveniente fue encontrar la información necesaria para el trabajo con el nitinol, pues la literatura que existe sobre el mismo es casi nula y la de internet es muy poca. 9. REFERENCIAS 1. http://www.scoi.com/thumba.htm 2. http://www.scoi.com/anat.htm El desarrollo del prototipo ha excedido el tiempo de ejecución según el cronograma propuesto inicialmente, debido a: 3. http://www.livingskin.com/hand_p artial.htm Al principio se decidió trabajar con tecnología de punta en el análisis de frecuencias, para lo cual se encontró que en el mercado se ofrecía un DSPIC de la compañía microchip. Durante casi un mes se estuvo recolectando la información relacionada al dispositivo, y se encontró que microchip lo sacó de circulación debido a que tenía errores y vuelve al mercado a mediados del año 2004. 5. www.nlm.nih.gov Se tomó la decisión de trabajar con el DSP de la Compañía Texas Instruments, que de acuerdo a sus características es 10. WEBSTER, John G. -. “Medical Instrumentation” , 3 ed., New 4. http://www.nitinol.com 6. www.sccot.org.co 7. www.analog.com 8. www.ti.com 9. MOMPIN , José -. “Introducción a la bioingeniería”, Barcelona, Marcombo, 1998, 316p. 9 York: John Wiley & Sons, 1988, 691p. 11. TOMPKINS, Willis J. -. “Biomedical Digital Signal Processsing”, Santafé de Bogotá, Prentice may, 1993, 367p. 12. LOPEZ, Luis -. “Anatomía Funcional del Sistema Nervioso”, México, Limusa 1979, 784p. UNIVERSIDAD SANTO TOMAS FACULTAD ELECTRONICA DE INGENIERIA ANDREA APARICIO GALLO E-MAIL: [email protected] [email protected] [email protected] JOSE EGINIO CUY CRUZ E-MAIL: [email protected] LUIS ALEJANDRO CAICEDO DUQUE E-MAIL: [email protected] [email protected] 10