Modificaciones para la segmentación del volumen
Las técnicas de segmentación o clasificación binarias basadas en umbral son
sensibles al ruido. A continuación se proponen dos alternativas para mejorar dicha
clasificación.
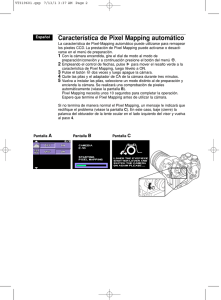
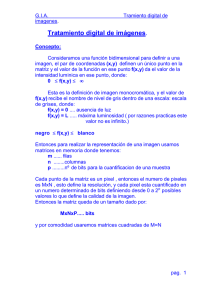
Desviación estándar.
Pixel dentro de una región
homogénea que puede conducir
a una superficie no existente en
el volumen.
Pixel perteneciente a la
superficie que puede originar
un hoyo.
Existen varias formas de mejorar la segmentación de la imagen, una alternativa son
las técnicas estadísticas. Por ejemplo el calculo de la desviación estándar ayuda a identificar
si el valor del pixel está muy lejos del promedio. En el cálculo de la desviación estándar
usaremos una vecindad de 3 x 3 pixeles. Primero se calcula el promedio posteriormente la
desviación estándar. Si las diferencias entre el valor del pixel y el promedio se eleva al
cuadrado, penaliza mas en la medida que esa diferencia aumenta.
El valor promedio del pixel se obtiene con la siguiente relación, en donde se toma
una vecindad de 3 x 3.
pixel (i, j ) promedio (i, j )
1 L 01 M 01
pixel (i l , j m) .
9 L 1 M 01
(15-1a)
En esta relación el primer índice indica los renglones, y el segundo las columnas (i,j) es la
posición del pixel de trabajo. El orden de los índices no afecta al valor final del promedio,
tampoco el valor de la desviación estándar. La diferencia importante se refleja en el tiempo
de computo.
En el cálculo de desviación estándar intervienen todos los pixeles y se obtiene con la
siguiente ecuación
desv.estand.(i, j ) 2 (i, j ) pixel(i l , j m) pixel(i, j ) .
L 01
M 01
L 1
M 01
2
(15-2a)
De la ecuación 15-1a se observa que para determinar el promedio en la posición de
trabajo se requieren nueve sumas y una división. La ecuación 15-2a indica que para
calculara la desviación estándar se deben de realizar nueve sumas (restas) con sus
respectivos productos (elevar al cuadrado). En resumen para determinar si un pixel
pertenece o no pertenece a la superficie, a la comparación con el umbral se deberá de
agregar una división 18 sumas, y nueve productos. En la medida que el volumen crece el
tiempo de computo también se incrementa.
Continuidad.
Otra posibilidad para disminuir el error en la segmentación del volumen es tomar en
cuenta la continuidad de los objetos. La clasificación binaria no toma en cuenta el valor de
los pixeles vecinos. Para poder tomar en cuenta la continuidad de los objetos de interés
dentro del volumen existen dos alternativas. Continuidad en un plano, y continuidad en 3
dimensiones. Aquí deduciremos dicha continuidad en ambos casos. Evidentemente agregar
este nuevo criterio a la visualización de las superficies aumenta el costo computacional.
Sombreado más natural.
El algoritmo más sencillo para el sombreado de las superficies, simplifica los
procesos físicos involucrados en la interacción de la luz con la superficie. El modelo
propuesto anteriormente, solo toma en cuenta la inclinación de la superficie a lo largo de un
plano (rebanada del volumen). Un sombreado más “natural” se logra cuando se toma en
cuenta la inclinación de la superficie en 3-D. Para esto se usa el gradiente.
En la medida que se agreguen mas consideraciones al visualizar el volumen, en esa
medida se aumenta el costo y la complejidad computacional.
Modelo Optico.
Un algoritmo alternativo para la visualización de los volúmenes de datos es el
modelo óptico. El modelo óptico construye un “nuevo volumen” a partir del volumen
original. Este “nuevo volumen” representa una propiedad óptica del primero. Por ejemplo
reflectividad, difusión, opacidad, transparencia, induce de refracción etc.
El modelo óptico mas general mapea los valores de pixel a índice de refracción,
posteriormente usando las ecuaciones de Maxwell en la frontera de dos medios puede
calcular la cantidad de luz transmitida y la cantidad de luz reflejada. La cantidad de luz
reflejada en alguna interfaz interna del volumen también es absorbida por el medio. La
cantidad de luz que llegue al detector proporcionara información sobre la profundidad de
dicha interfaz. El calculo de la luz que llega al detector es equivalente al factor de
inclinación. El modelo óptico se le puede agregar un fenómeno óptico extra, por ejemplo
que en dicha interfaz también exista el fenómeno de difusión. El fenómeno de difusión
proporcionara información sobre la inclinación.
La simplificación más importante en este modelo óptico es cuando solo se considera
incidencia normal. Para lograr la incidencia normal necesariamente se tiene que usar un
frente de onda plano. El uso del frente de onda plano trae a su vez como consecuencia que
el calculo del factor de absorción de la luz se simplifica. Sin embargo para poder encontrar
la normal a la interfaz es necesario calcular el gradiente en 3-D. Esto se refleja en un
tiempo extra de computo, y requiere más memoria para poder realizar el cálculo.
Los resultados que proporciona el modelo óptico son “mejores” que aquellos
proporcionados por las imágenes de superficies. Con la ventaja de que los pixeles con ruido
contribuyen muy poco en el proceso de visualización.
 0
0