1ª PEC
Anuncio

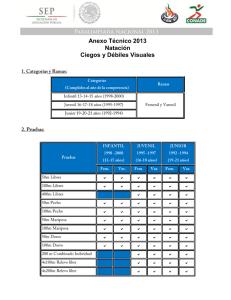
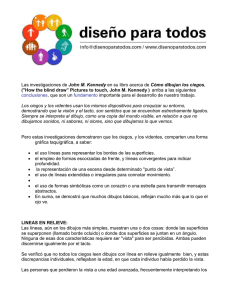
Departamento de Metodología de las Ciencias del Comportamiento Fundamentos de Investigación en Psicología 1ª PRUEBA DE EVALUACIÓN CONTINUA (PEC) “La representación interna del espacio a partir de descripciones verbales en ciegos”. Curso 2010-11 INSTRUCCIONES 1ª PEC Para realizar esta primera prueba de evaluación continua (PEC), hay que trabajar el artículo Carreiras, M. y Codina, B (1994). La representación interna del espacio a partir de descriptores verbales en ciegos. Cognitiva, 6(2), 145-158. Después de leerlo detenidamente, prestando atención a la metodología utilizada en el mismo, al tipo de variables, a las técnicas de control y a todos aquellos aspectos relacionados con los contenidos expuestos en los tres primeros bloques temáticos de la Unidad Didáctica (temas del 1 al 7), deberá contestar las 20 preguntas de elección múltiple que conforman la Prueba de Evaluación Continua (PEC) propiamente dicha. El alumno deberá subir a la plataforma las respuestas dadas a estas preguntas, para lo que deberá cumplimentar la plantilla de respuestas en formato ods que encontrará en el apartado “Tareas” (o “Entrega de trabajos”) o, si le resulta más cómodo, en formato xls que encontrará en el Foro de 1ª PEC. Solo se debe cumplimentar la hoja de respuestas en uno de los dos formatos, el que prefiera. La representación interna del espacio a partir de descripciones verbales en ciegos MANUEL CARREIRAS Y BENITO CODINA Universidad de La Laguna, Tenerife y Dirección Administrativa O.N.C.E., Tenerife Resumen La finalidad de esta investigación es evaluar la capacidad de las personas ciegas para construir una representación interna del espacio, con propiedades topológicas y métricas, a partir de descripciones verbales. Otras dos cuestiones que se abordan son si la representación del espacio es similar cuando se construye a partir de descripciones verbales o por experiencia táctil-visual, y en qué medida difieren las representaciones construidas por personas ciegas y videntes. Dos grupos de sujetos (ciegos y videntes) emparejados en cuanto a edad, sexo y nivel de instrucción participaron en dos experimentos. En las fases de aprendizaje de ambos experimentos los sujetos aprendieron la localización de un grupo de objetos a partir de una descripción verbal de su ubicación, o bien mediante la exploración visual/háptica de su distribución espacial. En la fase de prueba del primer experimento se le pidió a los sujetos que respondiesen a preguntas sobre diversas relaciones espaciales entre objetos (arriba-abajo, izquierda-derecha, en ángulo recto). En la fase de prueba del segundo experimento se les pidió a los sujetos que indicasen cuál de dos distancias era la más corta. En ambos experimentos se registraron los errores y el tiempo de reacción ante las preguntas. Los resultados del experimento 1 mostraron que los ciegos cometieron más errores que los videntes, pero sólo cuando se les pidió que verificasen las relaciones más complejas. Los resultados del experimento 2 indicaron que no hubo diferencias entre los ciegos y los videntes cuando generaron la representación a partir de una descripción verbal; sin embargo, los ciegos mostraron un mayor porcentaje de error y ligeramente mayores tiempos de reacción que los videntes después del aprendizaje visual/háptico. Los resultados se comentan en relación con las similitudes y diferencias entre ciegos y videntes en cuanto a procesos cognitivos y a la naturaleza de la representación interna del espacio, así como en cuanto al grado de semejanza entre la representación generada a partir de descripciones verbales y a partir de la percepción visual o táctil. Palabras clave: Cognición espacial, mapas cognitivos, modelos mentales, ceguera. Internal spatial representation of the blind from verbal descriptions Abstract Two experiments were carried out to assess the ability of blind people to embody topological and metrical properties in spatial representations generated from verbal descriptions. Another goal was to examine whether these topological and metrical properties were similar when the spatial representation was built from verbal descriptions or from haptic or visual perception. Two groups of subjects (congenitally blind and sighted) were matched for age, sex and level of instruction and performed two experiments. In the learning phases of both experiments subjects learned the location of a set of objects either from a verbal description or by exploring haptically or visually their spatial distribution. In the test phase of the first experiment subjects were asked to verify statements about up-down, left-right and up-down plus left-right relations between the objects. In the test phase of the second experiment subjects were asked to verify statments that compared distances between pairs of objects. Errors and reaction times were recorded in both experiments. Experiment 1 showed a higher percentage of error for blind than sighted subjects, but only when they were asked to verify the most complex relations. Experiment 2 indicated that there was no difference between blind and sighted when they generated the representation from a verbal description; however, the blind showed a higher percentage of error and slower reaction times than sighted after haptic-visual learning. Keywords: Spatial cognition, cognitive maps, mental models, blindness. Agradecimientos: Esta investigación fue financiada por un proyecto de investigación subvencionado por la O.N.C.E. (oficio 1727). Los autores agradecen las sugerencias de dos revisores anónimos y de Manuel de Vega. Correspondencia con autores: Manuel Carreira. Fac. Psicología. Univ. de La Laguna. Campus de Guajara. 38071 La Laguna (Santa Cruz de Tenerife). © 1994 by Aprendizaje, ISSN: 0214-3550 Cognitiva, 1994, (6) 2, 145-158 146 La representación interna del espacio es un tema de gran relevancia dentro de la Psicología Cognitiva. En los últimos años ha habido un renovado interés por conocer, entre otras cosas, cuáles son los mecanismos, las operaciones cognitivas y la naturaleza de la representación involucrados en el proceso de construcción y manipulación de la representación interna del espacio. En los años 70, mientras se producía el debate sobre el formato representacional (imágenes versus proposiciones), hubo una explosión importante de trabajos sobre la representación interna del espacio o mapas cognitivos, denominación esta ampliamente utilizada en aquel momento. Recientemente, con el impulso de la idea de modelos mentales, el estudio de la representación interna del espacio ha cobrado de nuevo interés, aunque desde una óptica ligeramente diferente (véase Carreiras, 1986, 1992; Evans, 1980; Golledge, 1987; Taylor y Tversky, 1992). La representación interna del espacio es algo que realizamos día a día, y de lo que nos servimos para la interacción con el entorno. Son múltiples las fuentes de información que contribuyen tanto a la formación como a la manipulación de una representación cognitiva de un determinado espacio. Una de las principales fuentes es la experiencia directa con el entorno; no obstante, el procesamiento de información simbólica, como la contenida en mapas o esquemas, resulta igualmente importante. Muchas veces nos basamos en la información contenida en callejeros o en mapas de carreteras para construir una representación del espacio y llegar a un determinado destino. Asimismo, hay situaciones en las que una persona produce una descripción lingüística, y otra persona, momentáneamente perdida en una ciudad extraña, elabora una representación espacial del trayecto descrito por la primera para llegar a un determinado lugar. Este último aspecto, la adquisición del conocimiento espacial a través del lenguaje, es el que está recibiendo una mayor atención últimamente. Existen diversos trabajos que abordan la adquisición del conocimiento espacial a partir de textos que describen configuraciones espaciales (vg: Ehrlich y Johnson-Laird, 1982; Mani y Johnson-Laird, 1982; Franklin y Tversky, 1990; De Vega, 1994, etc.). Una de las preguntas clave a responder con este tipo de investigaciones es si los procesos implicados en la formación y en la manipulación de la representación espacial son distintos cuando ésta se elabora a partir de diferentes fuentes de información, como, por ejemplo, textos y mapas. Partiendo de descripciones verbales, el oyente se enfrenta al problema de procesar información lingüística de carácter lineal y construir a partir de ella representaciones bi o tridimensionales (Denis y Denhière, 1990). Por el contrario, tomando como punto de partida la experiencia perceptiva de un entorno, o un mapa, la correspondencia entre el espacio percibido y la representación parece mayor. Los resultados de algunas investigaciones sugieren que, bajo determinadas circunstancias, la construcción de la representación espacial a partir de descripciones verbales puede ser funcionalmente equivalente a la adquirida por medio del estudio de mapas o por medio de la experiencia directa, aunque no todos los datos apuntan en dicha dirección (cfr. Denis y Cocude, 1989; Perrig y Kintsch, 1985; Taylor y Tversky, 1992). La formación de una representación interna del espacio a partir de textos o de descripciones verbales es particularmente importante en el caso de las personas que carecen de visión. Por ejemplo, una de las herramientas utilizadas hoy por los ciegos para desplazarse o aprender un determinado trayecto son los mapas verbales, que consisten básicamente en una secuencia de instrucciones sobre direcciones a seguir. Sin embargo, resulta curioso observar que, a pesar de la gran relevancia que tiene este tema para la población de invidentes, apenas se haya estudiado. El grueso de las investigaciones sobre la representación del espacio en ausencia de visión ha abordado cuestiones tales como similitudes y diferencias entre ciegos y videntes en la percepción y en la representación del espacio percibido de forma visual, táctil o mediante locomoción. Los resultados de tales investigaciones son un tanto dispares en cuanto a si las personas ciegas disponen de y usan o 147 no un sistema de representación del espacio similar al de los videntes. El estado del problema ha sido sintetizado por Carreiras y Codina (1992) en dos hipótesis, la de la representación visual, según la cual los ciegos congénitos tienden a codificar el espacio temporalmente, no logrando obtener un conocimiento espacial funcionalmente equivalente a la de los videntes y la hipótesis de la representación amodal, que establece que la representación interna del espacio no se encuentra vinculada a ninguna modalidad perceptiva específica, por lo que los ciegos podrían procesar imágenes espaciales de una forma similar a los videntes. Los resultados obtenidos por Carreiras y Codina concuerdan con la hipótesis de que la representación interna del espacio tiene un carácter amodal, aun existiendo una cierta primacía de la visión. No obstante, como ya hemos indicado, existen resultados dispares, que podrían deberse a las diferentes demandas de las tareas utilizadas en las distintas investigaciones. La representación espacial de los ciegos podría tener limitaciones específicas debidas a la ausencia de experiencia visual, resultando más factible encontrar tales diferencias en tareas difíciles y complejas, donde se requiera una mayor carga de procesamiento. El no haber encontrado diferencias podría deberse a la no utilización de tareas lo suficientemente complejas. La complejidad de la tarea, en términos de demandas de procesamiento, es una cuestión importante a tener en cuenta en este tipo de estudios. Puede ayudarnos a discernir si en realidad existen diferencias entre la representación espacial de ciegos y videntes, y atisbar en qué medida esas supuestas diferencias son importantes o si sólo representan una cierta primacía de la visión. Por otra parte, una nueva evidencia a favor de la hipótesis amodal sería el demostrar que tanto personas ciegas como videntes pueden formar una representación de un espacio funcionalmente equivalente a partir de distintas fuentes de información. Con el fin de evaluar la capacidad que poseen las personas ciegas congénitas y los videntes para construir una representación espacial de un entorno, a partir de descripciones verbales, se llevaron a cabo dos experimentos. Otra finalidad de la investigación fue verificar si las propiedades funcionales de dicha representación son similares a las de las que se derivan de la visión o del tacto. En ambos experimentos tanto sujetos ciegos como sujetos videntes tenían que aprender un entorno de pequeña escala. Dicho aprendizaje se realizaba bien estudiando visualmente (videntes) o mediante el tacto (ciegos) un mapa del mismo, o bien a partir de un texto que describía dicho espacio (ciegos y videntes). Posteriormente, los sujetos tenían que responder a preguntas sobre relaciones espaciales (topológicas y métricas) entre los distintos elementos. EXPERIMENTO 1 En este experimento los sujetos aprendieron la ubicación de seis elementos, bien mediante percepción visual/háptica o a partir de una descripción verbal, y luego respondieron a preguntas sobre relaciones topológicas entre ellos. Se manipuló además la dificultad de las preguntas, con el fin de variar las demandas de procesamiento requeridas para responderlas. METODO Sujetos Participaron 16 sujetos, 8 ciegos totales congénitos y 8 videntes. Los sujetos fueron equiparados en cuanto a edad (22-55 años) y nivel de instrucción previa (BUP, FPl, FP2 y Diplomados Universitarios). 148 Diseño Se empleó un diseño factorial mixto 2x2x3 (grupo x tipo de aprendizaje x orientación), con medidas repetidas en los dos últimos factores. La variable grupo constaba de dos niveles, correspondientes a los dos grupos de sujetos: ciegos y videntes. La variable tipo de aprendizaje hacía referencia a si los sujetos aprendieron la ubicación de los objetos mediante información verbal o a partir de una exploración visual (videntes) o háptica (ciegos). Finalmente, la variable orientación hacía referencia a relación espacial de los objetos entre sí, pudiendo ser ésta derecha-izquierda, arriba-abajo o en ángulo recto. Las variables dependientes fueron el porcentaje de error y la latencia de respuesta. Dado que las preguntas diferían ligeramente en cuanto a su longitud, y consecuentemente ésta podría afectar a su duración, el tiempo de respuesta se midió desde el momento que finalizó la formulación de la pregunta hasta el inicio de la respuesta del sujeto. Materiales La presentación de las preguntas sobre disposición espacial de los objetos entre sí en ambas modalidades y el registro de las respuestas se realizó con un ordenador compatible IBM, que disponía de una tarjeta de voz (VP-830) y de una llave vocal. Este sistema nos permitía presentar auditivamente las preguntas y registrar tanto los errores como el tiempo de respuesta. Para la presentación de tipo visual-háptico, se utilizó una maqueta con unas dimensiones (31x31 cm) en la que aparecían 6 figuras cuyo contorno se hallaba en relieve (círculo, tres puntos, cuadrado, una uve, triángulo y una equis) situadas en la parte superior izquierda, superior central, superior derecha, inferior izquierda, inferior central e inferior derecha, respectivamente. Estas figuras fueron elaboradas sobre una plancha de aluminio, con la herramienta de construcción de planos del Thermophon (termocopiadora). La Figura 1 muestra la disposición espacial de los 6 elementos en la maqueta. Además se presenta en la misma figura los 6 elementos utilizados en la condición verbal, en su correspondiente ubicación espacial. Procedimiento Los sujetos realizaron individualmente el experimento que constaba de dos sesiones, una en la que la presentación del material era de carácter verbal y otra en la que ésta era de tipo visual-háptica. Se contrabalanceó el orden de ejecución de las sesiones entre los sujetos de cada grupo. El intervalo temporal entre las sesiones fue de dos semanas. Además, como control suplementario de los posibles efectos de arrastre entre las dos sesiones, en la condición visual/háptica se les indicó a los sujetos que tenían enfrente un mapa en relieve, de forma cuadrada en el que estaban representadas seis figuras; mientras que en la condición verbal se les indicó que tenían que imaginarse que estaban «viendo» una habitación cuadrada desde arriba que contenía seis muebles. Cada una de las sesiones constaba a su vez de dos fases, una de aprendizaje y otra de prueba. En la fase de aprendizaje se le indicaba al sujeto la posición de los 6 objetos, uno a uno. En la condición visual-háptica a los sujetos se les proporcionaba un plano en relieve que mostraba la ubicación de los objetos (véase Figura 1 ) cuya localización se les describía verbalmente, con el fin de que los sujetos siguiesen el mismo orden de presenta- 149 FIGURA 1 Distribución espacial de los elementos utilizados en el experimento 1. Spatial distribution of the objetcs employed in Experiment 1. ción de los elementos que en la condición verbal, y la duración de la fase de aprendizaje fuese similar en ambas condiciones. Sin embargo, en la condición verbal los sujetos no disponían del plano, sino que sólo recibían una descripción verbal de la ubicación de los elementos (véase Tabla I). No obstante, previamente a la presentación verbal, se les mostró a los sujetos una superficie de cartón con dimensiones similares a las de la maqueta presentada en la condición visual-háptica, con el fin de que todos los sujetos dispusieran de un espacio mental similar para ubicar los objetos. La presentación de los objetos se efectuó de izquierda a derecha tanto para los situados en la parte superior como en la parte inferior de la maqueta. Antes de la fase de aprendizaje se llevó a cabo una fase de práctica para familiarizar a los sujetos con la tarea. Tabla I Descripciones verbales correspondientes al experimento 1. Verbal descriptions used in Experiment 1. CONDICION HAPTICA/VISUAL En la parte superior izquierda del plano hay un círculo. En la parte superior central del plano hay tres puntos. En la parte superior derecha del plano hay un cuadrado. En la parte inferior izquierda del plano hay una uve. En la parte inferior central del plano hay un triángulo. En la parte inferior derecha del plano hay una equis. CONDICION VERBAL En la parte superior izquierda de la habitación hay un armario. En la parte superior central de la habitación hay una silla. En la parte superior derecha de la habitación hay una mesa. En la parte inferior izquierda de la habitación hay un sofá. En la parte inferior central de la habitación hay una planta. En la parte inferior derecha de la habitación hay un sillón. En la fase de prueba se le presentaron auditivamente a los sujetos 18 preguntas de forma aleatoria. Estas preguntas se elaboraron de tal manera que 6 de ellas mostraban una relación espacial derecha-izquierda de los objetos entre sí, 6 una relación arriba-abajo y otras 6 una en ángulo recto (v.g. arriba y a la derecha). Por 150 ejemplo, los sujetos escuchaban una pregunta como ¿Qué figura está a la izquierda del cuadrado?, y ellos tenían que responder con el nombre de la figura correspondiente. El ordenador registraba el tiempo de respuesta. RESULTADOS Y DISCUSION El porcentaje de error en función de los tres tipos de pregunta y del grupo se presenta en la Figura 2. El ANOVA (grupo x tipo de aprendizaje x tipo de pregunta) no mostró diferencias en el factor grupo F(1,14)=2.20, como tampoco en el factor tipo de aprendizaje F(1,14)=3.47. Sin embargo, fue significativo el factor tipo tipo de pregunta F(2,28)=56.01, p<0.0001. Finalmente la interacción tipo de pregunta por grupo también fue significativa. F(2,28)=22.21, p<0.0001. El análisis a posteriori con la T de Tukey mostró que tanto los ciegos como los videntes cometieron más errores en las preguntas sobre relaciones espaciales en ángulo recto que en las de arriba-abajo e izquierda-derecha, no habiendo diferencias entre estas dos últimas, tanto en el caso de los ciegos como de los videntes. Además reveló que los ciegos cometieron más errores que los videntes en las preguntas sobre relaciones en ángulo recto. Ninguna de las restantes interacciones resultó significativa. Con respecto al tiempo de respuesta el ANOVA no mostró diferencias significativas del grupo F(1,14)=0.20, ni del factor tipo de aprendizaje F(1,14)=1.53. Unicamente mostró diferencias significativas del factor tipo de pregunta F(2,28)=77.46, p<0.0001. Las comparaciones a posteriori mediante la T de Tukey indicaron que no hubo diferencias entre el tiempo de respuesta de las preguntas sobre relaciones izquierda-derecha y arriba-abajo, pero ambas tardaron menos tiempo en responderse que las preguntas sobre relaciones espaciales en ángulo recto (véase Figura 3). Ninguna interacción resultó significativa. Tanto los resultados del porcentaje de error como del tiempo de reacción indican que los sujetos formaron representaciones espaciales funcionalmente equivalentes, independientemente de la modalidad de aprendizaje, datos que concuerdan con investigaciones previas realizadas con videntes. Por otra parte, no se observaron diferencias entre los ciegos y los videntes en las preguntas sobre relaciones arriba abajo y derecha-izquierda, ni en el porcentaje de error, ni en el tiempo de respuesta. La única diferencia entre ciegos y videntes se localiza en las preguntas sobre relaciones más complejas, las de ángulo recto, y sólo en el porcentaje de error, pero no en el tiempo de respuesta. Este resultado indica que las diferencias entre ciegos y videntes son pocas y sólo aparecen en las situaciones más extremas. Téngase en cuenta que las demandas de procesamiento de las preguntas de ángulo recto son mucho mayores que las de los otros dos tipos de preguntas, pues, también los videntes cometen más errores y tardan más en las de ángulo recto que en las otras dos. EXPERIMENTO 2 En este experimento los sujetos aprendieron la ubicación de cuatro elementos, bien mediante percepción visual/háptica o a partir de una descripción verbal, y luego respondieron a preguntas sobre relaciones métricas entre ellos. La tarea requiere la comparación de dos distancias métricas en línea recta, lo que supone un proceso inferencial. Los sujetos aprendieron el trayecto entre los distintos elementos, pero para realizar la tarea tenían que inferir la distancia en línea recta entre los mismos y luego decidir cuál de dos distancias en línea recta era mayor. Así pues, la tarea en principio, es más compleja y consecuentemente 151 FIGURA 2 Porcentaje de error de los sujetos ciegos y videntes en los tres tipos de pregunta (izquierda-derecha, arribaabajo y ángulo recto). Percentage of errors of the blind and sighted in the three type of questions (left-right, updown and right angle). FIGURA 3 Tiempo de respuesta de los sujetos ciegos y videntes en los tres tipos de pregunta (izquierda-derecha, arriba-abajo y ángulo recto). Response times of the blind and sighted in the three type of questions (left-right, up-down and right angle). requiere mayores demandas de procesamiento que la del experimento previo en donde se atiende a relaciones topológicas. METODO Sujetos Participaron en el experimento 10 ciegos totales congénitos y 10 sujetos videntes. Se equipararon los grupos en cuanto a edad (22-38) y nivel instruccional (estudios medios-superiores). 152 Diseño Se utilizó un diseño factorial mixto 2x2 (grupo x tipo de aprendizaje) con medidas repetidas en el último factor. El factor grupo constaba de dos niveles: ciegos y videntes. El factor tipo de aprendizaje se refería a si el aprendizaje era verbal o háptico/visual. Materiales Para la presentación de las preguntas y el registro de las respuestas, se utilizó un ordenador compatible IBM, que disponía de una tarjeta de voz (VP-830) y de un periférico con tres pulsadores mediante las cuales los sujetos emitían las respuestas. Este sistema nos permitía presentar auditivamente las preguntas y registrar tanto los errores como el tiempo de latencia de las respuestas. Asimismo, se empleó un maqueta en relieve de forma cuadrada (27x27 cm), que representaba el recorrido que los sujetos debían aprender, a través de una línea de puntos en altorrelieve, fácilmente perceptibles de forma háptica o visual. La maqueta en este experimento contenía cuatro elementos, que estaban representados por símbolos en relieve (véase Figura 4). FIGURA 4 Maqueta utilizada en el experimento 2. Scale model employed in Experiment 2. También se utilizó una maqueta lisa con las mismas dimensiones que el mapa para que los sujetos de la condición verbal dispusieran de un espacio similar para ubicar mentalmente los objetos, y para que pudieran comprender adecuadamente los conceptos espaciales que se utilizaban en la descripción verbal. Procedimiento Los sujetos realizaron individualmente el experimento que constaba de dos sesiones, una en la que la presentación del material era de carácter verbal y otra en la que ésta era de tipo visual-háptica, además de verbal. Se contrabalanceó el orden de ejecución de las sesiones entre los sujetos de cada grupo. El intervalo 153 temporal entre las sesiones fue de cuatro semanas. Cada una de las sesiones constaba a su vez de dos fases, una de aprendizaje y otra de prueba. Antes de iniciar la fase de aprendizaje se les indicaba a los sujetos el funcionamiento del mecanismo de respuesta. A continuación se les entregaba una maqueta lisa, con dimensiones similares a la maqueta que contenía los 4 lugares en altorrelieve, con el fin de que, al igual que en el experimento previo, todos los sujetos dispusieran de un espacio mental similar para ubicar los objetos. Seguidamente, una vez retirada la maqueta lisa comenzaba las fase de aprendizaje. En la fase de aprendizaje se le indicaba al sujeto la posición de los 4 objetos, uno a uno, siguiendo el recorrido mostrado en la Figura 4. En la condición visual-háptica los sujetos disponían de un plano en relieve que mostraba la ubicación de los objetos cuya localización se describía verbalmente (véase Tabla II). Sin embargo, en la condición verbal a los sujetos no se les proporcionaba la maqueta, sino que solamente se les describía verbalmente el recorrido y la ubicación de los lugares. Esta descripción se realizaba tres veces a todos los sujetos, comprobándose a continuación el aprendizaje del recorrido mediante preguntas sobre la disposición espacial de los elementos del mapa. La ausencia de errores en la ubicación de los puntos de referencia se utilizó como criterio de aprendizaje. En caso de no alcanzarlo, se le repetía una vez más el recorrido al sujeto y se le volvía a evaluar hasta que alcanzara el criterio preestablecido. Tabla II Descripción verbal empleada en el experimento 2. Verbal description used in Experiment 2. Estamos en una habitación de forma cuadrada en la que hay cuatro objetos. A continuación te vamos a enseñar un camino para ir pasando por todos estos objetos. Justo en la esquina izquierda de abajo de la habitación hay una silla. Ahora vamos a irnos desde la esquina de abajo a la izquierda hasta el centro de la habitación cuadrada, donde hay una alfombra. Desde el centro de la habitación vamos a irnos rectos hasta la parte de arriba, en cuyo centro y pegado a la pared hay un armario. Desde la parte central de arriba de la habitación vamos a irnos justo hasta la esquina derecha de abajo de la habitación, donde hay una planta. Aquí termina nuestro recorrido por la habitación. La fase de prueba constaba de la presentación de preguntas sobre comparaciones de distancias entre los 4 lugares, dos a dos. Por ejemplo, los sujetos escuchaban ¿Qué queda más cerca del armario, la alfombra o la planta? Si era la alfombra tenían que apretar la tecla de la izquierda y si era la planta tenían que apretar la tecla de la derecha. Es decir, si la respuesta correcta era la primera alternativa, entonces los sujetos debían pulsar la tecla de la izquierda, mientras que si era la segunda, debían pulsar la tecla de la derecha. Para recibir la pregunta siguiente los sujetos debían pulsar la tecla del medio. El orden de aparición de las preguntas fue aleatorio para cada sujeto. RESULTADOS Y DISCUSION Las medias del porcentaje de error se presentan en la Figura 5. El ANOVA 2x2 (grupo x tipo de aprendizaje) mostró que ambos efectos principales fueron significativos, el correspondiente al factor grupo F(1,18)=13.71, p<0.005, así como el del factor tipo de aprendizaje F(1,18)=9.08, p<0.01. También fue significativa la interacción entre ambos factores F(1,18)=9.08, p<0.01. El análisis a posteriori con la T de Tukey mostró que los ciegos cometieron más errores en la 154 condición háptica que en la condición verbal. Además, los ciegos en la condición háptica cometieron más errores que los videntes en la condición visual. Sin embargo, no hubo diferencias entre los ciegos y los videntes cuando ambos realizaron la condición verbal. La Figura 6 muestra las medias del tiempo de respuesta. El ANOVA sobre los tiempos de respuesta no mostró diferencias significativas, ni del factor grupo F(1,18)=2.87, ni del factor tipo de aprendizaje F(1,18)=3.00, ni tampoco de la interacción entre ambos factores F(1,18)=1.83. De nuevo, los resultados indican que tanto los ciegos como los videntes son capaces de formar una representación interna del espacio a partir de una descripción verbal, a la que aparentemente incorporan información métrica, que no está explícita en la descripción verbal. FIGURA 5 Porcentaje de error de los sujetos ciegos y videntes en las dos condiciones de aprendizaje. Percentage of error of the blind and sighted in the two learning conditions. FIGURA 6 Tiempo de respuesta de los sujetos ciegos y videntes en las dos condiciones de aprendizaje. Response time of the blind and sighted in the two learning conditions. 155 DISCUSION GENERAL Los resultados obtenidos en ambos experimentos indican que los sujetos construyen una representación interna del espacio a partir de ambos tipos de aprendizaje. Tanto los porcentajes de error como los tiempos de respuesta fueron similares en la condición de aprendizaje verbal y en la condición de aprendizaje visual/háptico en el experimento 1. En el experimento 2 se muestra un mayor porcentaje de error en la condición de háptica que en la verbal, pero sólo en el caso de los sujetos ciegos. Sin embargo, este efecto no ocurre en los tiempos de respuesta, ni tampoco existen diferencias entre las condiciones verbal y visual en el caso de los videntes. Así pues, los efectos de la modalidad de aprendizaje son mínimos, y cuando ocurren no suponen una peor ejecución en la condición verbal. Es plausible concluir que, al menos en el caso de los videntes, la representación espacial del entorno lograda a partir de descripciones verbales (mapa verbal) y, por tanto, sin ninguna referencia perceptiva directa, posee propiedades funcionales similares a aquella derivada del reconocimiento visual del mismo, porque resulta tan disponible y accesible como ésta. La representación construida a partir de descripciones verbales parece contener información métrica referida a la distancia relativa entre los objetos, que no estaba explícita en la descripción. Estos datos concuerdan con los hallazgos de diversos autores (Denis y Cocude,1989; Denis y Denhière, 1990; Taylor y Tversky, 1992), que establecen que las personas pueden utilizar inputs verbales para construir representaciones mentales que pueden ser procesadas de forma idéntica a las elaboradas visualmente. La peor ejecución —sólo en términos de porcentaje de error en el experimento 2— de los ciegos en la condición háptica que en la condición verbal, podría explicarse en función de las demandas de la tarea. Como hemos indicado, la tarea del segundo experimento supuestamente implicaba mayores demandas de procesamiento que el responder a las preguntas sobre relaciones topológicas simples (izquierda-derecha y arriba-abajo) del primer experimento. Por tanto, si los ciegos tienen alguna limitación específica debido a la ausencia de visión, ésta debería manifestarse en el experimento 2, aunque no se manifestase en las relaciones topológicas simples del experimento 1. Sin embargo, esta no parece la explicación más plausible, porque si así fuera, debería manifestarse una peor ejecución de los ciegos con respecto a los videntes en ambas condiciones, tanto en la háptica como en la verbal. Al menos este debería ser el resultado esperable partiendo del supuesto de que ambas condiciones demandan recursos de procesamiento similares. Es más, en todo caso la condición verbal debería demandar más recursos de procesamiento que la condición háptica, pero no al revés. Téngase en cuenta que en la condición háptica, los sujetos reciben también una descripción verbal del recorrido. Una explicación más plausible de este resultado es la interferencia de las demandas de la tarea —comparaciones de distancias en línea recta— con las restricciones de aprendizaje secuencial impuestas en la condición háptica. En la condición visual es posible apresar la relación espacial que existe entre todos los elementos de la maqueta de un golpe de vista, sin embargo, esto no ocurre en la condición háptica, en la que el proceso es de tipo lineal. Los sujetos siguen táctilmente el trayecto marcado entre los distintos lugares, a la vez que se les describe. Normalmente, aunque no exclusivamente, el sistema háptico recoge información por medio de una secuencia de movimientos exploratorios de contacto sobre superficies y contornos. Así pues, un heurístico que suele utilizarse para recabar información sobre la distribución espacial de un entorno es el movimiento entre los diversos lugares. Aunque también es un proceso lineal el que se sigue en la formación de la representación a partir de una descripción verbal, en cuanto que se va procesando la ubicación de un elemento con respecto al anterior, la posible 156 interferencia parece menor que en la condición háptica. En la condición verbal los sujetos no tienen que seguir necesariamente el trayecto que existe entre los distintos lugares. Aunque van procesando de forma serial la localización espacial de cada lugar, pueden hacerlo ubicando mentalmente cada lugar con respecto al anterior y con respecto a los lados de la maqueta, sin necesidad de seguir el trayecto entre los lugares. Por otra parte, tanto la ausencia de diferencias, excepto la ya señalada, entre las condiciones en las que se han empleado distintas modalidades de presentación de información, como la ausencia de diferencias entre la ejecución de los ciegos y de los videntes, está en consonancia con las predicciones de la hipótesis amodal. Las diferencias entre ciegos y videntes aparecen en aquellas situaciones en las que se incrementan las demandas de procesamiento, como en la verificación de relaciones complejas (ángulo recto) en el experimento 1. La manipulación de relaciones topológicas complejas (ángulo recto) demanda más recursos que la de relaciones topológicas simples (arriba-abajo e izquierda-derecha), tal como lo demuestran los patrones de errores y de tiempos de respuesta, tanto en los ciegos como en los videntes. Así pues, aunque los ciegos parecen disponer de una representación espacial similar a la de los videntes, y parecen utilizar procesos similares, con una eficiencia similar, en situaciones extremas muestran ligeras deficiencias con respecto a los sujetos videntes. Los resultados de esta investigación no permiten extraer conclusiones sobre el grado de tales diferencias, ni si tales diferencias residen en procesos de codificación o de recuperación de la información espacial. Otra cuestión importante, relacionada con la anterior, es la del formato representacional. El asumir la hipótesis amodal no significa necesariamente una vinculación con un determinado formato representacional, como por ejemplo el proposicional. La hipótesis amodal es compatible con otros formatos representacionales. De hecho, diversas investigaciones aportan evidencia empírica de que las descripciones verbales pueden representarse en un formato espacial. Se ha demostrado repetidamente que el lector no representa la estructura lingüística del texto, sino que crea un modelo mental sobre el contenido del texto, muchas veces de carácter espacial (Glenberg, Meyer y Lindem, 1987; Morrow, Greenspan y Bower, 1987). Los modelos mentales parecen preservar la distancia física entre los objetos, tales como la posición, la distancia y la perspectiva (Bryant, Tversky y Franklin, 1992; Franklin y Tversky, 1990; Glenberg et al., 1987; Morrow et al., 1987; Franklin, Tversky y Coon, 1992). Además, las relaciones espaciales parecen determinar la accesibilidad de la información de los modelos mentales. Glenberg et al. (1987) encontró que los objetos mencionados en una narración permanecían disponibles en función de su proximidad con el protagonista de la historia. Morrow y colaboradores replicaron este efecto, encontrando que los objetos descritos que estaban en la misma habitación que el protagonista estaban más accesibles que los objetos ubicados en otra habitación. Finalmente, los resultados de esta investigación permiten apuntar la posibilidad de que los ciegos congénitos pueden adquirir el conocimiento espacial de un entorno no sólo a partir de la locomoción o de mapas táctiles, sino también a partir de descripciones verbales. La representación interna del espacio obtenida a partir de descripciones verbales parece funcionalmente similar a la que pueden adquirir los videntes mediante percepción visual. Este hallazgo plantea la necesidad de potenciar el uso de mapas verbales en las personas ciegas, no meramente como un complemento de los mapas táctiles, sino como una herramienta útil, fiable y práctica de cara a la formación de una representación interna de un determinado espacio. 157 Extended Summary In the past few years there has been considerable interest in how blind and sighted people encode spatial information. Much of the earlier work compared accuracy levels of blind and sighted individuals in various tasks that involved learning a spatial configuration either by touch or vision. The results of some experiments suggest that visually handicapped individuals encounter greater difficulty that the sighted in structuring and representing spatial configurations, while some other results suggest that the blind possess spatial representations which are functionally analogous to those of the sighted (Carreiras & Codina, 1992). The different processing demands needed to solve the range of tasks used could in part account for the inconsistency of the results obtained in different experiments. It could be the case that the blind only show a comparable performance to the sighted on spatial tasks that do not require very high processing demands. On the other hand, some empirical evidence indicates that verbal descriptions of small-scale spaces allow people to construct representations functionally similar to those resulting from perceptual processing. Denis & Cocude (1989) have shown that when sighted individuals were asked to scan over images of configurations which they had elaborated from a verbal description, the representation constructed from a text not only contained topological information explicitly stated, but also contained metric information which was not made explicit at any time in the text, such as information regarding the relative distances between objects. This kind of research has important consequences for evaluating the effects that the lack of vision have on the spatial representation of the blind. The process of learning a spatial configuration from a verbal description is at some extent similar to that of learning it from touch. In both cases, the system commonly, although not exclusively, gathers information by means of a temporal sequence. In contrast, visual perception may derive the relative location of objects and the layout of an spatial configuration from only one glance. The present research is devoted to a deeper exploration of the performance of the blind and sighted in two tasks that involved different kinds of spatial knowledge. Two experiments were carried out to asses the ability of blind people to embody topological and metrical properties in spatial representations. Another goal was to examine whether these topological and metrical properties were similar when the spatial representation was built from verbal descriptions and from haptic or visual perception. Two groups of subjects (congenitally blind and sighted) were matched for age, sex and level of instruction and performed two experiments. Each experiment was conducted in two sessions. Subjects learned the location of a set of objects from a verbal description in one session, while they learned the location of objects by exploring haptically or visually their spatial distribution in the other session. The order of the sessions was counterbalanced within each experiment. In Experiment 1 subjects learned first the location of six objects and then were asked to verify statements about up-down, left-right and up-down plus left-right relations between the objects. Both errors and reaction times were recorded. The results showed a higher percentage of error for the blind than the sighted, but only when they were asked to verify the most complex relations. In addition, it took more time to verify the most complex spatial relations (updown plus left-right) than the simple ones, but there were not differences between subjects nor between type of learning (verbal versus haptic-visual). 158 In Experiment 2, subjects learned first the location of four objects and then they were asked to verify statements that compared distances between pairs of objects. Errors and reaction times were also recorded. The results indicated that there were not differences between the blind and the sighted when they generated the representation from a verbal description; however, the blind showed a higher percentage of error and slower reaction times than the sighted after haptic and visual learning. In addition, the blind showed a higher percentage of error in the haptic learning condition rather than in the verbal description condition. Results are discussed in terms of the properties of the spatial representation when generated from verbal descriptions, as well as in terms of representational similarities and differences between the blind and the sighted, depending on task demands and modality of input. Referencias BRYANT, D. J.; TVERSKY, B., y FRANKLIN, N. (1992). Internal and external spatial frameworks for representing described scenes. Journal of Memory and Language 31: 74-98. CARREIRAS, M. (1986). Mapas cognitivos: revisión crítica. Estudios de Psicología (26), 61-91. CARREIRAS, M. (1992). Mapas cognitivos y orientación espacial. En J. L. Pinillos, M. de Vega y J. Mayor (Eds.). Tratado de Psicología General. Tomo IV «Memoria y representació n». Editorial Alhambra, 375408. CARREIRAS, M., y CODINA , B. (1992). Spatial memory by the blind and sighted: Visual and amodal hypothesis European Bulletin of Cognitive Psychology, 12, 51-78. DENIS, M. y COCUDE, M. (1989). Scanning visual images generated from verbal descriptions. European Journal of Cognitive Psychology, 1, 293-307. DENIS, M. y DENHIERE, G. (1990). Comprehension and recall of spatial descriptions. European Bulletin of Cognitive Psychology, 10,115-143. EHRLICH, K., y JOHNSON-LAIRD, P. N. (1982). Spatial descriptions and referential continuity. Journal of Verbal Learning and Verbal Behavior 21, 296-306. EVANS, G.W. (1980) Environmental Cognition. Psychological Bulletin, 88, 259-287 FRANKLIN, N., y TVERSKY, B. (1990). Searching imagined environments. Journal of Experimental Psychology: General 119, 63-76. FRANKLIN, N.; TVERSKY, B., y COON, V. (1992). Switching points of view in spatial mental models acquired from text. Memory & Cognition, 20, 507-518. GLENBERG, A. M.; MEYER, M., y LINDEM, K. (1987). Mental models contribute to foregrounding during text comprehension . Journal of Memory and Language 26, 69-83. GOLLEDGE, R. (1987). Environmental cognition. En D. Stokols y I Altman (Eds.). Handbook of Environmental Psychology. Nueva York, Wiley. MANI, K., y JOHNSON-LAIRD, P. N. (1982). The mental representation of spatial descriptions. Memory & Cognition, 10, 181-187. MORROW, D. G.; GREENSPAN, S. L., y BOWER, G. H. (1987). Accessibility and situation models in narrative comprehension. Journal of Memory and Language 26, 165-187. PERRIG,W., y KINTSCH , W. (1985). Propositional and situational representations of text. Journal of Memory and Language, 24, 503-518. TAYLOR, H. A., y TVERSKY, B. (1992). Spatial mental models derived from survey and route descriptions. Journal of Memory and Language, 31, 261-292. DE VEGA, M. (1994) Characters and their perspectives in narratives describing spatial environments. Psychologycal Research, 56, 116-126. PREGUNTAS 1ª PEC: La representación interna del espacio a partir de descripciones verbales en ciegos. EXPERIMENTO 1 1. ¿Qué técnica de control se utiliza para formar grupos? a) Aleatorización; b) Equiparación; c) Contrabalanceo. 2. ¿Cuántas variables independientes hay? a) 3; b) 7; c) 12. 3. ¿Cuántos niveles tiene la variable independiente orientación? a) 1; b) 2; c) 3. 4. Una variable dependiente fue: a) El tipo de exploración; b) La orientación del objeto; c) El porcentaje de error. 5. La latencia de respuesta es una: a) Variable dependiente; b) Variable independiente; c) Variable extraña controlada. 6. Es un diseño factorial porque: a) Cada variable tiene más de un nivel; b) Tiene más de una variable independiente; c) Tiene más de una variable dependiente. 7. La variable tipo de aprendizaje se evalúa a nivel: a) Intrasujeto; b) Intersujeto; c) Mixto. 8. ¿Qué efecto, propio de los diseños intrasujetos, amenaza a la validez interna y se ha controlado en este diseño? a) Selección diferencial; b) Arrastre; c) Mortandad experimental. 9. La técnica de contrabalanceo se utiliza para: a) Controlar el efecto de orden; b) Formar los grupos; c) Asignar los tratamientos. 10. Es un diseño factorial mixto porque: a) Hay un grupo de ciegos y otro de videntes; b) Hay variables manipuladas a nivel inter y otras a nivel intra; c) Los grupos están formados por hombres y mujeres. EXPERIMENTO 2 11. ¿Cuál es la variable manipulada a nivel intrasujeto?: a) Grupo; b) Tipo de aprendizaje; c) Tipo de percepción visual/háptica. 12. ¿Cuántas variables independientes hay?: a) 2; b) 3; c) 4. 13. Una variable dependiente es: a) Distancia entre dos objetos; b) Presentación del material: verbal/visual; c) Tiempo de respuesta. 14. La hipótesis formulada en la Introducción se denomina: a) Nula; b) Alternativa; c) De trabajo. 15. Si hiciéramos la representación gráfica de los resultados en la variable “porcentaje de error” de este experimento, las líneas: a) Serían paralelas; b) Se cruzarían o tenderían a cruzarse en algún punto; c) Serían curvilíneas, siguiendo cada una de ellas una distribución normal, sin que lleguen a cruzarse. 16. La metodología utilizada en esta investigación es: a) Experimental; b) Cuasiexperimental; c) Ex post facto. 17. A la hora de planificar este experimento se ha tenido fundamentalmente en cuenta variables que pudieran afectar a su validez: a) Interna; b) Externa; c) Ecológica. 18. Las variables independientes son: a) Todas cuantitativas; b) Todas de manipulación intencional; c) Una de manipulación intencional y otra de manipulación por selección de valores. 19. El diseño utilizado es: a) Univariado; b) Multivariado; c) Unifactorial intersujeto. 20. Este diseño tiene: a) Dos condiciones experimentales: una inter y otra intrasujeto; b) Una variable dependiente inter y otra intrasujeto; c) Un factor inter y el otro intrasujeto.