Instrumentación y control
Resumen de exposición
sobre el método de Control
industrial de tipo
Integral + proporcional
−
TEORIA BASICA.
En clases pasadas hemos aprendido que el control industrial * es aquel que compara el valor de la variable
o condición a controlar con un valor deseado y toma una acción de acuerdo con la desviación existente sin
que el operario intervenga en absoluto.
Así mismo mediante la exposición de los métodos de control todo − nada y proporcional, hemos encontrado
que dichos métodos evalúan constantemente las variables de un proceso, con respecto a un valor patrón de
dichas mediciones y que cuando se produce una variación entre el valor de la variable medida y el punto de
consigna; dicha diferencia es definida como error.
Ahora bien, todo control, trata de averiguar que es lo que hizo que el valor medido diferenciara del valor
esperado, se analiza como fue la variación y por último se busca la forma de eliminar dicha diferencia o error
de operación (aún en el proceso on −off es posible ver esto).
Debido a que los procesos modernos exigen automatización, rapidez en la corrección y exactitud, se ha
relegado el proceso todo − nada (on−off) y discontinuado el uso de métodos de control proporcional (como
tal).
Hoy en día los modernos controles (integral y/ proporcional y/o diferencial) tienden a ser cada vez más
complicados, es por ello que los diseñadores de controles, tienden a aprovechar en la medida de lo posible,
1
todo recurso computacional y electrónico existente. Lográndose con ello que una unidad PIC (programable
interfase computational) conectada entre el sensor y el transductor, efectúe correcciones de forma automática,
rápida y precisa; sin necesidad de hacer uso a todo momento de una computadora central. Reduciéndose así
fallas, errores y tiempo valioso que afecten el proceso.
¿ Qué es el control proporcional + Integral ?
¡ Buena pregunta! la cual puede definirse como El perfeccionamiento del control proporcional, solo que
ahora a la constante de proporcionalidad se le suma una integral que incluye ciertas modificaciones del error
Antes de tomar lo anterior como absoluto veamos detalladamente como es un proceso de control basado en
instrumentación industrial y deduzcamos (con manzanas) el porque de este tipo de control.
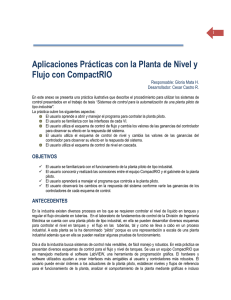
Figura 1
Antes de empezar el análisis observe detenidamente la figura 1. Como puede verse es un esquema de control
de una torre de destilación de metanol, el cual proviene de una mezcla metanol y agua, que al ser separada del
metanol por diferencias de evaporación tiende a dar un metanol casi puro (mas concentrado aún si recircula).
Dicho metanol será usado para enriquecer cerveza, brandi barato o como solvente.
¿ Qué tiene que ver esto con el control ?
Calma y vayamos por partes. En este proceso hay una variable vital, la Temperatura, como usted sabe el punto
de fusión del metanol es más bajo que el del agua, sabiendo por consiguiente que el metanol se evaporará a
una temperatura alderredor de 25°C, sin embargo industrialmente se aplica una temperatura de 40°C, misma
que es proporcionada por un intercambiador de calor de flujo inverso, alimentado por vapor. Dicho vapor
puede ser regulado por una válvula eléctrica (servo − válvula o elemento final de control) para que deje pasar
mas vapor y con ello aumente la temperatura o a la inversa.
El control del proceso esta basado en la temperatura, la cual por cuestiones técnicas y económicas debe
2
mantenerse en 40°C
La implementación del control Integral + Proporcional empieza así:
• El sensor analiza por medio de un termistor la temperatura dentro de la torre y la envía al controlador a
través de los transmisores y transductores; en forma de corriente eléctrica (vea sus copias de medidores de
temperatura).
• Nuestro controlador no puede interpretar la temperatura como tal, por lo que auxiliado por un transductor,
el controlador efectúa una comparación entre la señal de entrada c(t) y el valor de ajuste. Obteniendo o no
una variación que recibe el nombre de error e(t). Si este ultimo existe, nuestro controlador envía una señal
de corrección m(t) al elemento final de control.
• En un flujo de alimentación y recirculación continuo la temperatura seria constante, pero sabemos bien que
esto no ocurre, por lo que la temperatura esta oscilando y es por esto que existe un error (o diferencia entre
el valor obtenido y el valor establecido). Que debe ser analizado por el mismo controlador antes de enviar
una señal de control
• La parte proporcional manejada por este controlador radica en que la válvula esta abierta al 50% a 0 volts,
cerrada completamente a −5 volts y abierta completamente a +5 volts (por cuestiones económicas) según la
siguiente gráfica.
3
• Imaginemos que se produce un error de temperatura (variación), que esta se incrementa hasta 56°C, es
preciso cerrar cierta longitud de la válvula para que la temperatura baje y cierta cantidad de voltaje negativo
hará esto
• Comenzando con la parte matemática proporcional, tenemos que:
• Toda ecuación de control proporcional tiene la siguiente formula.
4
 0
0