Anexo 1.2: Modelación Matemática de Sistemas Físicos
Anuncio

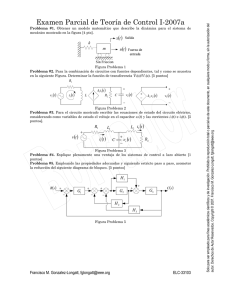
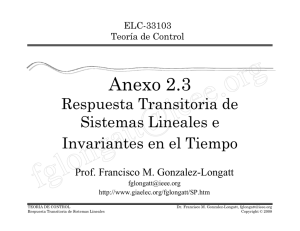
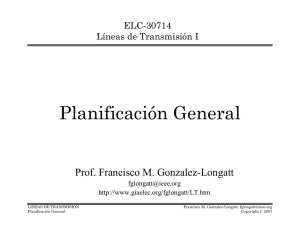
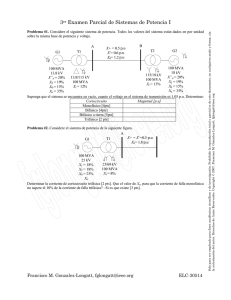
ELC-33103 Teoría de Control Anexo 1.2 Modelación Matemática de Sistemas Físicos Prof. Francisco M. Gonzalez-Longatt [email protected] http://www.giaelec.org/fglongatt/TeoriaControlI.html TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos • Obtener un modelo dinámico para el sistema de fuerzas trasnacional en al dirección vertical que se muestra considerando que la entrada fuerza f(t), Salidas x1(t) x2(t) B/2 k2 B/2 x2 (t ) M2 k1 x1 (t ) M1 f (t ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos B/2 k2 B/2 x2 (t ) M2 Salida 2 x1 (t ) − x2 (t ) Elongación k1 x1 (t ) M1 f (t ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Salida 1 Entrada 1 Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos • Con las posiciones de referencia determinadas tal como se ha especificado. • Un desplazamiento inicial del resorte superior produce una fuerza igual p g y opuesta p a M1g + M2gg. • Y un desplazamiento inicial del resorte inferior produce una fuerza que compensa M1g. TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos • Se efectúa un diagrama de cuerpo libre: FB2 = B dx2 (t ) FR2 = K2 x2 (t ) 2 dt FB1 = B dx2 (t ) 2 dt M2 FR1 = K1[x1(t ) − x2 (t )] Fuerzas Pasivas se dirigen en sentido opuesto al desplazamiento x2 (t ) FR1 = K1[x1(t ) − x2 (t )] x1 (t ) M1 f (t ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos • Del cuerpo M1 se tiene: FR1 = K1[x1(t ) − x2 (t )] Aplicando la 2da Ley de Newton: f (t ) = M 1a1 + FR1 x1 (t ) M1 f (t ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Sustituyendo las respectivas fuerzas se tiene: d 2 x1 (t ) f (t ) = M 1 + K1 [x1 (t ) − x2 (t )] 2 dt Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos • Del cuerpo M2 se tiene: FB2 = B dx2 (t ) FR2 = K2 x2 (t ) 2 dt FB1 = B dx2 (t ) 2 dt M2 x2 (t ) A li d la Aplicando l 2da 2d Ley L de d Newton: N t 0 = M 2 a2 + FR 2 + FB1 + FB 2 − FR1 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos FR1 = K1[x1(t ) − x2 (t )] Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos FB2 = B dx2 (t ) FR2 = K2 x2 (t ) 2 dt FB1 = B dx2 (t ) 2 dt M2 Sustituyendo las respectivas fuerzas se tiene: x2 (t ) FR1 = K1[x1(t ) − x2 (t )] d x2 (t ) dx(t ) 0 = M2 − K1 [x1 (t ) − x2 (t )] + K 2 x2 (t ) + B 2 dt dt 2 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 1. Modelo Matemático de Sistemas Físicos • El modelo dinámico del sistema queda dado por las siguientes ecuaciones diferenciales: d x2 (t ) dx(t ) − K1 [x1 (t ) − x2 (t )] + K 2 x2 (t ) + B =0 M2 2 dt dt 2 d 2 x1 (t ) M1 + K1 [x1 (t ) − x2 (t )] = f (t ) 2 dt TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 2. Función de Transferencia • Para la combinación de circuitos con fuentes dependientes, tal y como se muestra en la siguiente Figura. R1 v1 (t ) i1 (t ) L k1i1 (t ) R2 + + v2 (t ) C + − k 2 v2 (t ) v3 (t ) − • Determinar la función de transferencia V3(s)/V1(s). TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 − 2. Función de Transferencia • Se procede a establecer las ecuaciones circuitales que definen la mala de la entrada R1 v1 (t ) i1 (t ) L k1i1 (t ) R2 + + v2 (t ) C + − k 2 v2 (t ) v3 (t ) − di1 (t ) vin (t ) = R1i (t ) + L dt TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 − 2. Función de Transferencia • En la segunda red acoplada, y se aplica la ley de dv2 (t ) corriente de Kirchoff: ic (t ) = C2 R dt 1 v1 (t ) i1 (t ) k1i1 (t ) R2 L + + v2 (t ) C + − k 2 v2 (t ) v3 (t ) − k 1i1 (t ) ic (t ) v2 (t ) R2 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos v2 (t ) dv2 (t ) k1i1 (t ) = + C2 R2 dt Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 − 2. Función de Transferencia • De la tercera malla se tiene: R1 v1 (t ) i1 (t ) L k1i1 (t ) R2 + + v2 (t ) C + − k 2 v2 (t ) v3 (t ) − vout (t ) = k 2 v2 (t ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 − 2. Función de Transferencia • El modelo dinámico del circuito resulta ser: v2 (t ) dv2 (t ) k1i1 (t ) = + C2 R2 dt vout (t ) = k 2 v2 (t ) di1 (t ) vin (t ) = R1i (t ) + L dt • Se procede a aplicar transformada de Laplace en ambos lados de cada ecuación, ecuación considerando las condiciones iníciales nulas. TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 2. Función de Transferencia • Aplicando transformada de Laplace resulta: di1 (t ) vin (t ) = R1i (t ) + L dt v2 (t ) dv2 (t ) k1i1 (t ) = + C2 R2 dt vout (t ) = k 2 v2 (t ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Vin (s ) = R1 I1 (s ) + sLI1 (s ) V2 (s ) k1 I1 (s ) = + sC2V2 (s ) R2 Vout (s ) = k 2V2 (s ) Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 2. Función de Transferencia • Se despeja I1: Vin (s ) I1 (s ) = R1 + sL V2 (s ) k1 I1 (s ) = + sC2V2 (s ) R2 ⎡1 ⎤ Vin (s ) = V2 (s )⎢ + sC2 ⎥ k1 R1 + sL ⎦ ⎣ R2 • Se opera matemáticamente: Vout TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos k 2 R2 k1Vin (s ) = (R1 + sL )(1 + sR2C2 ) Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 2. Función de Transferencia • Finalmente la función de transferencia resulta: Vout k 2 R2 k1 = Vin (R1 + sL )(1 + sR2C2 ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 3. Función de Transferencia • Para el sistema de control mostrado en la Figura. TW (s ) Θ R (s ) + − Θ E (s ) 100 K0 Va (s ) + − I a (s ) 1 sLa + Ra KT N1 N2 ++ Ω M (s ) N1 Ω y (s ) 1 1 sJ eq + Beq N2 s Θ y (s ) Kb 1.0 • Determine D i la l representación ió en ecuación ió de d estado d TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 3. Función de Transferencia • Para determinar la representación de estado del sistema se tiene que la entrada θ R (t ) y salida θ y (t ) . • Para las variables intermedias se tiene: −1 va (t ) = L {Va (s )} ia (t ) = L {I a (s )} ωm (t ) = L {Ω M (s )} ω y (t ) = L {Ω y (s )} −1 −1 −1 θ c (t ) = L {Θ c (s )} Θ R (s ) + − −1 TW (s ) Θ E (s ) N1 N2 ++ 100 K0 Va (s ) + − I a (s ) 1 sLa + Ra KT Ω M (s ) N1 Ω y (s ) 1 1 sJ eq + Beq N2 s Θ y (s ) Kb 1.0 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 3. Función de Transferencia • Tomando en cuenta esta sección del diagrama de () bloques: TW s Θ R (s ) Va (s ) + − + Θ E (s ) − I a (s ) 1 sLa + Ra Kb 100 K0 Va (s ) + − I a (s ) 1 sLa + Ra KT N1 N2 ++ Ω M (s ) N1 Ω y (s ) 1 1 sJ eq + Beq N2 s Kb 1 .0 KT Ω M (s ) dia + Ra ia + K bωm (t ) va (t ) = La dt TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 Θ y (s ) 3. Función de Transferencia • Para otra porción del sistema resulta: TW (s ) TW (s ) Θ R (s ) KT Ia (s) N1 N2 ++ + − Θ E (s ) 100 K0 Va (s ) + − I a (s ) 1 sLa + Ra KT N1 N2 ++ Ω M (s ) N1 Ω y (s ) 1 1 sJ eq + Beq N2 s Kb 1.0 Ω M (s ) 1 sJ eq + Beq dω m N1 K T ia (t ) + TW (t ) = J EQ + BEQωm N2 dt TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 Θ y (s ) 3. Función de Transferencia • Para la parte de la entrada se tiene: TW (s ) Θ R (s ) + − Θ E (s ) 100 K0 Va (s ) + − N1 N2 ++ I a (s ) 1 sLa + Ra KT Ω M (s ) N1 Ω y (s ) 1 1 sJ eq + Beq N2 s Θ y (s ) Kb 1 .0 Θ R (s ) + Θ E (s ) − 100 Θ y (s ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos K0 Va (s ) [ ] va (t ) = 100 K 0 θ r (t ) − θ y (t ) Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 3. Función de Transferencia • Para la parte de la salida: Θ R (s ) TW (s ) + − Θ E (s ) 100 K0 Va (s ) + − I a (s ) 1 sLa + Ra KT N1 N2 ++ Ω M (s ) N1 Ω y (s ) 1 1 sJ eq + Beq N2 s Kb Ω M (s ) N1 Ω y (s ) 1 N2 s 1.0 Θ y (s ) N 1 dθ y ωm (t ) = N 2 dt TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 Θ y (s ) 3. Función de Transferencia • Finalmente el conjunto de ecuaciones que definen la dinámica son: dia va (t ) = La + Ra ia + K bωm (t ) dt dω m N1 TW (t ) = J EQ + BEQωm K T ia (t ) + N2 dt N 1 dθ y ωm (t ) = N 2 dt d [ ] va (t ) = 100 K 0 θ r (t ) − θ y (t ) TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 3. Función de Transferencia • Se construye la presentación de modelo de estado: ⎡ Ra ⎢− L ⎡ i&a ⎤ ⎢ a ⎢ ⎥ ⎢ KT ⎢ω& m ⎥ = ⎢ J ⎢ θ&y ⎥ ⎢ EQ ⎣ ⎦ ⎢ 0 ⎣⎢ kb − La BEQ − J EQ N1 N2 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos 100ko ⎤ ⎡100ko − ⎥ La ⎥ ⎡ i ⎤ ⎢ La a ⎢ ⎢ ⎥ ⎢ ⎥ 0 ⎥ ⎢ωm ⎥ + 0 ⎢ ⎥ ⎢⎣ θ y ⎥⎦ ⎢ 0 ⎥ ⎢ 0 ⎥⎦ ⎣ ⎤ 0 ⎥ ⎥ θ N1 ⎥ ⎡ r ⎤ N 2 J EQ ⎥ ⎢⎣TW ⎥⎦ 0 ⎥ ⎥ ⎦ Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 3. Función de Transferencia • Las ecuaciones algebraicas resultan ser: ⎡θ e ⎤ ⎡0 ⎢θ ⎥ = ⎢0 ⎣ y ⎦ ⎢⎣ 0 N1 N2 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos ⎡ ⎤ i a − 1⎤ ⎡1 0⎤ ⎡ θ r ⎤ ⎢ ⎥ ⎥ ⎢ωm ⎥ + ⎢ ⎢ ⎥ ⎥ 0⎥ 0 0⎦ ⎣TW ⎦ ⎣ ⎦ ⎢⎣ θ y ⎥⎦ Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 4. Reducción de Diagrama de Bloques • Determine el diagrama de bloque equivalente reducido del siguiente sistema. 1 s Θ R (s ) + − 1 1 + 100s + − 1 s+5 1 − + 55s + 5 100s + 1 100s 2 + 10s + 1000 1 + s+5 − Θ y (s ) −105 1.0 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 4. Reducción de Diagrama de Bloques • Se modifica la posición de un punto de bifurcación. 100s 2 + 10 s + 100 100 s + 1 1 s Θ R (s ) + 1 1 + 100s − + 1 − + 55s + 5 − 100s + 1 100s 2 + 10s + 1000 1 s+5 1 + s+5 − −105 1.0 • S Se modifica difi la l posición i ió de d un punto t de d bifurcación, bif ió y se efectúa una simplificación de cascada. 100 s 2 + 10 s + 100 (100s + 1)(s + 5) 1 s Θ R (s ) + − 1 1 + 100s + − 1 − + 55s + 5 −105 1 s+5 + − Θ y (s ) 100s + 1 100s + 10 s + 1000 2 1 .0 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 Θ y (s ) 4. Reducción de Diagrama de Bloques • Se simplifica otra cascada. 100 s 2 + 10 s + 100 (100s + 1)(s + 5) 1 s + Θ R (s ) − + 1 1 + 100 s 1 − + 55s + 5 − 105(100s + 1) − 1 s+5 + − Θ y (s ) 100s 2 + 10 s + 1000 1 .0 • Se S simplifica i lifi la l sumatoria t i 1 s Θ R (s ) + − 1 1 + 100 s + − 1 − + 55s + 5 − 105(100s + 1) 1 ⎡ 100s 2 + 10s + 100 ⎤ 1− (s + 5) ⎢⎢⎣ (100s + 1) ⎥⎥⎦ Θ y (s ) 100s 2 + 10s + 1000 1 .0 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008 4. Reducción de Diagrama de Bloques • Afectando sumas y simplificando: 1 s Θ R (s ) + + 1 1 + 100 s − 1 − + 55s + 5 − 105(100s + 1) − − 100s 2 − 90 s + 999 (s + 5)(100s + 1) Θ y (s ) 100s 2 + 10s + 1000 1.0 • Finalmente Fi l t resulta: lt Θ R (s ) (− 20s 2 )( )( ) − 2s − 200 554s + 5500s 2 + 5 100s 2 − 90s + 999 11000000s + 45520000s + 146339100s 442042430s + 90179752s − 1089947161s 2 − 110608085s − 999000 7 6 TEORÍA DE CONTROL Ejemplos de Modelación de Sistemas Físicos 5 4 3 Θ y (s ) Dr. Francisco M. Gonzalez-Longatt, [email protected] Copyright © 2008