DEFORMACIÓN NORMAL Y ANGULAR
El concepto de deformación es de fundamental importancia para el ingeniero en lo
que respecta al estudio de las deflexiones. Es bien sabido que una pieza de máquina
puede fallar en servicio si sufre deformaciones excesivas, aun cuando los esfuerzos
asociados permanezcan por debajo de los valores de fluencia o fractura. Lo que, es
más, el concepto de deformación juega un papel preponderante en las técnicas
experimentales
en los problemas
demedibles
resistencia
de materiales
puesto que
que
los esfuerzos noutilizadas
son, e n general,
cantidades
directamente,
mientras
las deformaciones si lo son. Usualmente, esto implica el obtener datos
experimentales de deformaciones que luego serán transformados en términos de
esfuerzos.
El conocimiento de la deformación puede aplicarse a diversos campos de trabajo,
como lo es en la minería, en donde es fundamental tener conocimiento sobre la
deformación angular y lineal que se ejerce sobre los marcos de sostenimiento en el
socavón ya que esto contribuirá a disminuir la cantidad de accidentes producidos
por la deformación y posterior ruptura de las vigas encargadas del sostenimiento del
macizo rocoso.
1. DEFINICIÓN DE DEFORMACIÓN.
Cualquier cuerpo solido sujeto a fuerzas o esfuerzos, sufrirá una deformación, tanto
longitudinal como angular, bajo la acción de estos, dicho de otra forma, un sólido
antes de deformarse tendrá una forma definida, la cual se verá alterada al aplicar
cierta carga, estas deformaciones que sufre el sólido son mínimas y en muchos
casos son imperceptibles para el ojo humano, ejemplo de ello es la deformación que
sufre los pilares de un puente al pasar varios vehículos sobre el o la deformación
que sufren los pilares de una edificación al acumularse nieve sobre su tejado.
Para conocer la deformación de un cuerpo es preciso conocer primero la
deformación
de uno de cualquiera de los paralelepípedos elementales que lo
forman.
I.
1° Una TRASLACION que lleva el origen del paralelepípedo del punto O al
punto O´.
II.
2° Una ROTACION del paralelepípedo alrededor de un eje que pasa por O´
Tanto 1 y 2 originan el movimiento del paralelepípedo,
paralelepípedo, pero sin deformarlo.
III.
3° Unas DEFORMACIONES LINEALES de las aristas del paralelepípedo
IV.
4° Unas DEFORMACIONES ANGULARES “SIMETRICAS” de los
ángulos que forman las aristas del paralelepípedo, inicialmente 90°.
Tanto 3 y 4 originan la deformación del paralelepípedo.
1.1
Deformación lineal o normal
La deformación normal es la deformación de as aristas de un
paralelepípedo, se consideran positivas cuando hay aumento de volumen y
negativo cuando su volumen se reduce
Esta deformación está definida por la siguiente formula:
ε = ∆
Hay cambio de volumen más el cuerpo mantiene la forma que poseía.
1.2
Deformación angular
La deformación angular es la deformación de los ángulos de un paralelepípedo,
se consideran positivas cuando impliquen un giro en en un giro en sentido
horario, y negativas en un sentido anti horario.
Esta deformación está definida por la siguiente formula:
f ormula:
∆
∆
deθvolumen,
= pero sí de forma. Si θoriginalmente
=ℎ
No hay cambio
la sección
transversal del cuerpo tiene forma rectangular, bajo un esfuerzo cortante se
convierte en un paralelogramo.
2. Definición matemática de la deformación
Como las deformaciones generalmente varían de punto a punto, las definiciones de
deformación deberán de referirse a elementos infinitesimales.
∆u
ε = ∆∆→
lim→ ∆x =
Para caso bidimensional, una definición básica de la deformación puede ser
expresada por la siguiente expresión:
D´C´ DC
ε = ∆→
lim
∆→ DC
Al considerar también las deformaciones angulares, obtenemos las siguientes
ecuaciones
O´C´ OC = lim [∆x∆x / ∆x] ∆x =
lim
ε = ∆→
∆→ OC
∆→
∆→
∆x
O´E´ OE = lim [∆y / ∆y] ∆y =
ε = ∆→
lim
∆→ OE
∆→
∆→
∆y
< ´´´
ɣ = ∆→
lim
∆→ 2
∆→
∆
→
= ∆→
lim
{
/
/
∆x
/
/
∆y
}
=
=
∆∆→
∆→
∆x
∆y
2
2
→
Consideremos ahora el sistema de ejes x’ e y’, y calculemos para ellos las
deformaciones unitarias axiales y angulares:
= ´cos
´cos θθ y´sin
sin θ
= ´sin
´sin θ y´cos θ
cos
= ´cos
´
sin θ
´sin
´ = cos θ v sin θ
´ = θ v cos θ
Para el sistema de ejes x´y´, se tiene las siguientes deformaciones
ε´ = ´ = ´ ´
´
´
´
´
ε´ = ´
´ = ´ ´
´
´ = (´ ´ ) (
´ ´ )
ɣ´´ = ´
(
´ ´ ´ ´ ´ ´
Operando la primera ecuación.
ε´ = ( cos
cosθθ dvdx sinθ
sinθ)cos
)cosθθ (dudy cocoss θ dvdy sinθ)sinθ
ε´ =
θ dvdy θ (
( )sinθcosθ
)sinθcosθ
ɣ sin θ cos θ
ε´ = ε θ εθ ɣ
Reordenando las ecuaciones con ayuda de ecuaciones trigonométricas
ε
ε
ε
ε
ɣ
+
−
´
ε = ε+2ε ε−2εcos2θ ɣ2 sin2θ
ε´ = 2 2 cos2θ 2 sin2θ
ɣ´´ = ε−2εsin2θ ɣ2 cos2θ
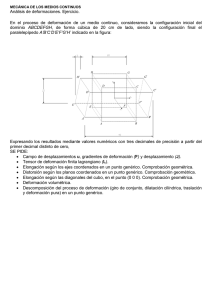
EJERCICIOS.La barra rígida está soportada por una articulación en A y por los cables BC y DE. Si la
ε
deformación máxima admisible
admisible encada cable es adm = 0.003. Determinar el
desplazamiento vertical
vertical máximo en el punto donde se a
aplica
plica la carga P.
ɛ=
=∗
(δDE)máx= ɛmáx*LDE = 0.003(3)=0.009 m.
(δBC)máx= ɛmáx*LBC = 0.003(1)=0.003 m.
.9 = ⤇
δBE= 0.0036 m.
.9 = ⤇
∴ 3.5 = 0.0203
δDE= 0.0075 m.
Yp = 0.00525 m.= 5.25 mm.