Trabajo en Clase ARDUINO
Nombre: Gualoto Miguel, Panchi Jonathan
Construir en parejas 2 aplicaciones de ARDUINO mediante la plataforma TINKERCAD.
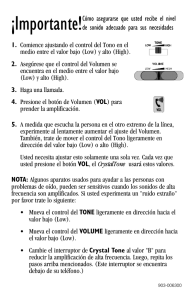
APLICACIÓN 1. Semáforo inteligente.
El semáforo funciona normalmente hasta que el peatón presiona el botón para cruzar.
Si al presionar el botón existen autos cruzando, el semáforo se pone en rojo luego de
30 segundos.
Si al presionar el botón NO existen autos cruzando, el semáforo cambia a amarillo y
a rojo inmediatamente.
El semáforo funciona con tiempos y en el siguiente orden:
Verde: 15 segundos
Amarillo: 2 Segundos
Rojo: 15 Segundos
Los autos son detectados mediante sensor de presencia, escogido de acuerdo a disponibilidad.
Semáforo
const int rojo =13;
const int amarillo =12;
const int verde =11;
const int boton =7;
int valor;
const int distancia = 4;
int sensor;
void setup()
{
pinMode(rojo,OUTPUT);
pinMode(amarillo,OUTPUT);
pinMode(verde,OUTPUT);
pinMode(boton,INPUT);
pinMode(distancia,INPUT);
}
void loop()
{
int valor= digitalRead(boton);
int sensor= digitalRead(distancia);
if (valor==HIGH && sensor==LOW) {
digitalWrite(amarillo,HIGH);
delay(2000);
digitalWrite(amarillo,LOW);
digitalWrite(verde,LOW);
digitalWrite(rojo,HIGH);
delay(15000);
digitalWrite(rojo,LOW);
delay(15000);
}
if (valor==LOW){
digitalWrite(rojo,HIGH);
delay(15000);
digitalWrite(rojo,LOW);
digitalWrite(amarillo,HIGH);
delay(2000);
digitalWrite(amarillo,LOW);
digitalWrite(verde,HIGH);
delay(15000);
digitalWrite(verde,LOW);
}
if (valor==HIGH && sensor==HIGH){
digitalWrite(rojo,LOW);
delay(15000);
digitalWrite(rojo,HIGH);
delay(15000);
}
}
Link:
https://www.tinkercad.com/things/cOlJpZy2tAp-fantabulousuusam/editel?sharecode=Zo5DHdjMr413BYKKAc3nIbEg2vg34HKMkGBagp6jAiw=
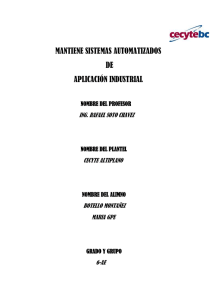
APLICACIÓN 2. Parqueadero inteligente
Al detectar un vehículo, el conductor presiona un pulsador y la barrera controlada mediante
un servo motor se levanta hasta 90º. Una vez que el auto cruzó la barrera se coloca en posición
inicial 0º. Para la salida es el mismo procedimiento.
Dentro del parqueadero que encienden una luz verde, si está disponible. Existen 3
parqueaderos disponibles.
Parqueadero
#include <Servo.h>
Servo servomotor;
int angulo = 0;
int aumentar = 6;
int disminuir = 5;
void setup() {
servomotor.attach(7);
pinMode(disminuir, INPUT);
pinMode(aumentar, INPUT);
servomotor.write(angulo);
}
void loop() {
if (digitalRead(aumentar) == LOW)
{
angulo++;
if (angulo >= 90)
{
angulo = 90;
}
}
if (digitalRead(disminuir) == LOW)
{
angulo--;
if (angulo <= 0)
{
angulo = 0;
}
}
servomotor.write(angulo);
delay(10);
}
Link:
https://www.tinkercad.com/things/kGdegmX4J1H-gloriousamberis/editel?sharecode=SOUO8uqHO2Mj1ipCFAe6nMmIW0CZ63_n-Wz-RSRZXPo=