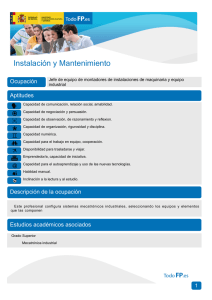
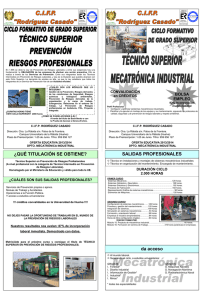
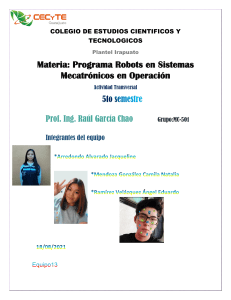
Ciclo de desarrollo para productos mecatrónicos Brazo Manipulador - Robot Yamaha para FORD MOTOR COMPANY. Francisco de Jesús Gutierrez Balderrama Ingeniería Mecatrónica - 4097. Ing. Rafael Ruiz. Análisis de Proyectos Mecatrónicos - 8vo. Semestre 1 Ciclo de desarrollo para productos mecatrónicos Índice Introducción…………………………………………………………………3 Identificar necesidades………………………………………………………5 Establecer especificaciones………………………………………………….7 Generar, Seleccionar y Probar Conceptos…………………………………..12 Prototipos Para la Validación de Conceptos………………………………..15 Diseño Detallado……………………………………………………………17 Prototipos para la Evaluación del Sistema………………………………….18 Ajuste del Sistema de Control………………………………………………20 Prototipo Físico Rápido……………………………………………………..21 Optimización del diseño…………………………………………………….23 Documentación del diseño………………………………………………….25 Prototipos finales para evaluación y registro……………………………….26 Escalado de la producción…………………………………………………..29 Optimización del ciclo de vida……………………………………………...31 2 Ciclo de desarrollo para productos mecatrónicos Introducción El proceso evolutivo constante del ser humano ha desencadenado una serie de ideas que terminan materializándose, todo esto con el fin de conseguir una mejora continua en la vida cotidiana la cual envuelve aspectos tanto laborales como personales. Una de las últimas invenciones del siglo XX fue el llamado “robot”, un término que causa ruido con solo escucharse. El siguiente artículo está dirigido específicamente a qué es un robot industrial. Para poder definir lo qué es un robot industrial es necesario aclarar dos puntos importantes: el primero es la diferencia que existe entre los conceptos de lo que es un robot y lo que es un manipulador. Dicha diferencia se presenta entre el mercado japonés y el euroamericano. Los japoneses tienen en cuenta como qué es un robot industrial cualquier mecanismo que posea articulaciones móviles el cual se destina para la manipulación, mientras que los euroamericanos exigen cierto nivel elevado de complejidad haciendo hincapié en el control de este. El segundo punto importante a tener en cuenta es lograr la concordancia para poder realizar la definición de lo qué es un robot industrial enfocándose en lo que es el concepto occidental. Debido a la constante evolución de la robótica surgen conceptos más nuevos cada día. La definición más aceptada y considerable es la proveniente de la Asociación de Industrias de Robótica (RIA, Robotic Industry Association) la cual lo define como “un manipulador multifuncional reprogramable capaz de mover materias, piezas, herramientas, o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas”. Los robots industriales actualmente se encuentran en todas las empresas con largas y complejas líneas de producción, sustituyen la mano de obra humana, reducen costos y maximizan ganancias, además, la programación automática de sus funciones beneficia la precisión en las tareas y disminuye la posibilidad de errores en el proceso. Podría decirse que un robot industrial es una máquina multifuncional capaz de mover materias u objetos, manipular herramientas y piezas, son programables para hacer diversas tareas automáticamente, es decir, sin la necesidad de la intervención constante de una persona. A lo largo de los años, el avance de las tecnologías robóticas ha mejorado notablemente, actualmente hay cinco categorías en las cuales se pueden clasificar los autómatas según su función y grado de libertad: Robots manipuladores. Robots de control por computador o controlador lógico programable. Robots de repetición por aprendizaje. Robots inteligentes, frecuentemente llamados androides. Micro-robots o nano-robots. 3 Ciclo de desarrollo para productos mecatrónicos Los robots industriales pueden ser utilizados por las compañías para cumplir con una infinidad de tareas, ya que son más precisos, efectivos y rápidos que la mano de obra humana. Algunos de sus usos regulares son la manipulación de materiales delicados, soldadura, carga, descarga y corte de elementos pesados, aplicación de productos como pintura, baños de metales o ácidos, medición de sólidos, líquido, gases, o aplicación de altas presiones, e incluso pueden funcionar para la supervisión del control de calidad de los materiales fabricados. Por ende, dentro de la industria se necesita bastante este tipo de robots para facilitar el trabajo, dentro de la empresa FORD Motor Company que se encuentra en la ciudad de Chihuahua, Chihuahua en México, en el área de Cigüeñal Diesel donde se fabrican los motores de 4.4 y 6.7 litros respectivamente, fabricaremos juntos con la empresa Yamaha un brazo manipulador el cual tendrá como función el ensamblar los engranes para los dos motores del cigüeñal Diesel. Producción de motores 4.4 y 6.7l. 4 Ciclo de desarrollo para productos mecatrónicos Identificar Necesidades El punto de partida de cualquier proceso de mercadeo, debe ser la identificación de una necesidad o una oportunidad de negocio inexplorada, mal explorada o que se puede cubrir con mayor competitividad y eficiencia. Identificada la necesidad y resuelto el problema del producto se pasa al campo del consumidor quien tomará decisiones de compra basado en su percepción de necesidad y la información que tenga para tomar una decisión. Dentro de estos puntos se encuentran conocer los tipos de necesidades, identificar el valor de la necesidad e identificar el bien o servicio adecuado para cubrir la necesidad. Para nuestro brazo robótico que tiene como fin de implementar el trabajo a la hora del ensamble de la operación en su dicha etapa, nuestras necesidades son las siguientes: • El robot debe ser diseñado para montar engranajes de dos tipos diferentes de engranes, el motor 4.4 el cual pertenece a la Range Rover y el 6.7 de la FORD Super Dutty. • El tamaño debe ser óptimo para estar en medio de la línea de producción, ya que el ensamblaje de los engranes es la mitad del proceso completo dentro de cada cigüeñal. • Al estar diseñado para dos motores diferentes, el brazo robótico deberá tener dentro de su ensamblaje un cambio de pieza donde se monta el engrane, esto para tener en específico uno para el motor 4.4 y otro para el motor 6.7 respectivamente y poder cambiarlo dependiendo del proceso que se esté realizando. • El robot deberá ser montado en una base la cual será construida dependiendo de las medidas y condiciones que necesite el tamaño del robot. • Deberán comprarse sensores de posición y movimiento los cuales realizaran la tarea de que el motor detecte cuando los engranes estén en su posición y pueda tomarlos o en caso de que este vacío dar alarma de que deben volver a rellenar de engranes. • Diseñar el puerto de mando con el cual se controlará el robot para darle mantenimiento y programación para las diferentes tareas que realizara. 5 Ciclo de desarrollo para productos mecatrónicos • Diseñar la celda robótica en la cual se encontrará el brazo robótico para tener seguridad y no haya accidentes en cuestión de exponer a empleados, maquinas, etc. Establecer Especificaciones Las especificaciones descriptivas atienden a aspectos del bien o servicio que son susceptibles de medición -pudiendo entonces comprender toda clase de medidas, tanto las comunes, como las de carácter científico- o de apreciación por los sentidos. 6 Ciclo de desarrollo para productos mecatrónicos Para el establecimiento de especificaciones descriptivas, resulta recomendable analizar todos los aspectos que para el área requirente resulta valioso posea el bien, debiendo entonces traducirlos en una especificación técnica particular para cada uno de dichos aspectos de valía. Para la realización de nuestro robot ensamblador de engranes para cigüeñal Diesel en motores de 4.4 y 6.7 litros, tendremos las siguientes especificaciones: A. Dimensiones: • Base: 25x25 cm. De largo, 6 cm. De altura-grosor. 6cm 25cm 25cm 25cm • Articulación 0-5: 6cm. De ancho, 10cm de largo, 1 cm. De grosor. 10cm 6cm • Eslabón 1: 5.5 cm. De ancho, 30 cm. De largo, 1 cm. De grosor. 1cm 7 Ciclo de desarrollo para productos mecatrónicos 30cm 5.5cm • Eslabón 2: 5.5 cm. De ancho, 15 cm. De largo, 1 cm. De grosor. 15cm 1cm 5.5cm B. Material: Aluminio. Debido a su alta conductividad térmica, el aluminio es difícil de calentar al principio. Una vez calentado, se funde a una temperatura menor. Esto puede hacer que el proceso de fabricación sea más difícil al soldar secciones gruesas a delgadas, debido a que el calor usualmente se absorbe en la sección más gruesa, lo que dificulta la fusión o unión de una sección más delgada. Suavidad del material. El aluminio es más suave que el acero y puede plantear retos para alimentar el electrodo de alambre. Los avances en los robots de brazo porta cables han ayudado a reducir varios problemas que plagaban la alimentación de alambre de aluminio en el pasado. Fibra de Carbono. Tenemos la suerte de estar ante un material que presenta oposición a los cambios bruscos de temperatura, es termoestable, y conserva su forma de forma eficiente. Además de ello, cuenta con excelentes propiedades ignífugas. Este material se comercializa en forma de tela y de piezas principalmente. Entre estas piezas encontramos los vinilos, los tubos y varillas, las planchas, etc. Todos ellos, se pueden encontrar de formas, tamaños, dimensiones y colores diferentes, además de en distintas calidades como pasa con todo. Hemos tratado las aplicaciones más comunes de la fibra de carbono. Pero también debemos saber que es utilizada para refuerzo de materiales como el plástico o como electrodo en grandes áreas. Incluso tiene usos menos conocidos como la filtración de gases. 8 Ciclo de desarrollo para productos mecatrónicos C. Unidad de Medida: Centímetro (cm.) - Según el Sistema General de Unidad de Medida de los Estados Unidos Mexicanos, según lo define el artículo 5, segundo párrafo de la Ley Federal de Metrología y Normalización. D. Año de Fabricación: 2019. E. Condiciones de Operación: Temperatura. Frecuencia. Resistencia de materiales. 9 Ciclo de desarrollo para productos mecatrónicos Electricidad. Vibraciones. Potencia. 10 Ciclo de desarrollo para productos mecatrónicos Voltaje. Dentro del análisis para establecer las especificaciones se debe tomar en cuenta lo siguiente: Las especificaciones deben establecer las características esenciales del bien que será adquirido. Si un requerimiento esencial es dejado fuera de la especificación, el fallo puede recaer en favor de un bien que no satisfaga las necesidades del comprador. Situaciones como ésta concluyen con la insatisfacción de todos y pueden constituir un desperdicio del dinero de los contribuyentes. Si semejante omisión es descubierta oportunamente, la licitación puede ser cancelada, las especificaciones corregidas y realizarse un nuevo procedimiento de contratación. La especificación debe ser razonablemente tolerante. La precisión innecesaria establecida en las especificaciones resulta costosa y puede limitar la competencia. Las especificaciones deben ser susceptibles de ser verificadas. La especificación elaborada de tal manera que no permita verificar que los bienes o servicios cumplen con la misma, tiene poco valor y resulta confusa 11 Ciclo de desarrollo para productos mecatrónicos Generar, Seleccionar y Probar Conceptos 1. Automatización: La automatización es un sistema donde se trasfieren tareas de producción, realizadas habitualmente por operadores humanos a un conjunto de elementos tecnológicos. Un sistema automatizado consta de dos partes principales: Parte de Mando Parte Operativa La Parte Operativa es la parte que actúa directamente sobre la máquina. Son los elementos que hacen que la máquina se mueva y realice la operación deseada. Los elementos que forman la parte operativa son los accionadores de las máquinas como motores, cilindros, compresores y los captadores como fotodiodos, finales de carrera. La Parte de Mando suele ser un autómata programable (tecnología programada), aunque hasta hace bien poco se utilizaban relés electromagnéticos, tarjetas electrónicas o módulos lógicos neumáticos (tecnología cableada). En un sistema de fabricación automatizado el autómata programable está en el centro del sistema. Este debe ser capaz de comunicarse con todos los constituyentes de sistema automatizado. Objetivos de la automatización: 2. Mejorar la productividad de la empresa, reduciendo los costes de la producción y mejorando la calidad de esta. Mejorar las condiciones de trabajo del personal, suprimiendo los trabajos penosos e incrementando la seguridad. Realizar las operaciones imposibles de controlar intelectual o manualmente. Mejorar la disponibilidad de los productos, pudiendo proveer las cantidades necesarias en el momento preciso. Simplificar el mantenimiento de forma que el operario no requiera grandes conocimientos para la manipulación del proceso productivo. Integrar la gestión y producción. Robótica: La robótica es una rama interdisciplinaria de la ingeniería, que se desprende de las ingenierías mecánica, electrónica, eléctrica, teoría del control y de las ciencias de la computación. Estudia el análisis, diseño, manufactura y aplicación de máquinas automáticas con cierto 12 Ciclo de desarrollo para productos mecatrónicos grado de inteligencia, capaces de realizar tareas que pueden reemplazar las actividades de un ser humano. La robótica se clasifica en las siguientes ramas: Robótica industrial: Encargada del diseño de robots que permiten realizar tareas relacionadas al proceso de ensamble y manufactura de componentes a nivel industrial, como son: ensamble de autopartes, clasificación de piezas, posicionamiento de componentes electrónicos, empaquetado de alimentos, control de calidad, etc. El objetivo principal es reducir el costo y tiempo de producción, reducir los errores por manufactura humana y mejorar los procesos. Robótica de servicio: Se enfoca en el diseño de robots que proporcionan servicios a los seres humanos. Un robot de servicio opera de manera totalmente o parcialmente autónoma. Las tareas comunes de este tipo de robots son: sistemas de cirugía, cuidado de personas, servicios de limpieza domestica e industrial, entretenimiento, exploración, desactivación de bombas, minería, rescate, etc. Robótica espacial: Esta área se enfoca en el diseño de robots para la actividad espacial como es la exploración planetaria o la asistencia en órbita. Entre muchas otras cosas, son utilizados para obtener muestras del terreno y estudiar la composición del suelo y de la atmosfera. Un ejemplo son los robots Spirit y Oportunity cuya misión fue realizar labores de investigación para detectar posibles índices de la existencia de agua en el planeta Marte 3. Control: Es la acción o el efecto del poder decidir sobre el desarrollo de un proceso o sistema. También se puede entender como la forma de manipular ciertas variables para conseguir que actúen en la forma deseada. Subdisciplinas: 4. Control a lazo abierto. Control a lazo cerrado. Control lineal. Control no lineal. Control óptimo. Control robusto. Ingeniería de Control: 13 Ciclo de desarrollo para productos mecatrónicos Es un enfoque interdisciplinario para el control de sistema y dispositivos. Combina áreas como la electrónica, eléctrica, mecánica, química, ingeniería de procesos, teoría matemática entre otras. La Ingeniería de control es una disciplina que se focaliza en modelizar matemáticamente una gama diversa de sistemas dinámicos y el diseño de controladores que harán que estos sistemas se comporten de la manera deseada. Aunque tales controladores no necesariamente son electrónicos y por lo tanto la ingeniería de control es a menudo un subcampo de otras ingenierías como la mecánica. Dispositivos tales como circuitos eléctricos, procesadores digitales y los microcontroladores son muy utilizados en todo sistema de control moderno. La ingeniería de control tiene un amplio rango de aplicación en áreas como los sistemas de vuelo y de propulsión de los aviones de aerolíneas, militares, en la carrera espacial y últimamente en la industria automotriz. El objetivo del control automático es poder manejar con una o más entradas (o referencia), una o más salidas de una planta o sistema, para hacerlo, la idea más primitiva es colocar entre la referencia y la planta, un controlador que sea el inverso de la función de transferencia de la planta, de tal manera que la función de transferencia de todo el sistema (la planta más el controlador), sea igual a uno; logrando de esta manera que la salida sea igual a la entrada; esta primera idea se denomina control en la lazo abierto. Un ejemplo clásico de control en lazo abierto es una lavadora de ropa ya que ésta funciona durante un ciclo predeterminado sin hacer uso de sensores. 14 Ciclo de desarrollo para productos mecatrónicos Prototipos Para la Validación de Conceptos 15 Ciclo de desarrollo para productos mecatrónicos Componentes - Robot Yamaha: Controlador. Actuadores. Manipulador. Articulaciones. Muñeca. Actuador final o gripper. Dispositivos de entrada y salida. Sensores. Lenguaje de programación. Dispositivos especiales. 16 Ciclo de desarrollo para productos mecatrónicos Diseño Detallado 17 Ciclo de desarrollo para productos mecatrónicos Prototipos para la Evaluación del Sistema Cuando el ciclo de desarrollo de un producto se acerca a su fin, el coste de los cambios que se hagan se incrementa. Los cambios en el diseño deberían hacerse en el principio del proceso con el fin de producir el mayor impacto y teniendo un menor efecto en la financiación. Por tanto, el proyecto debe ser sometido a evaluación tan pronto como sea sensato en el proceso de diseño. Es entonces fácil alterar los diseños del proyecto sobre la base de las pruebas. El primer evaluador del proyecto es el diseñador mismo. Sin embargo, no puede saber todas las situaciones en que se usará el futuro proyecto, por lo que deben pedirse también a otras estimaciones suplementarias. Con frecuencia las sugerencias más valiosas vienen o de las personas de la producción o de los futuros usuarios del producto. Las habilidades de un investigador son útiles al recolectar una tan amplia gama de opiniones, y al sumarlas. Los siguientes prototipos serán nuestras opciones para que nuestro sistema (robot Yamaha) tenga el éxito necesario para llevar acabo su función: • Temperatura: Sensor de Temperatura - Serie FT. • Frecuencia: Sensor de Distancia - Keyence Serie LK-G5000 18 Ciclo de desarrollo para productos mecatrónicos • Resistencia de Materiales: Prototipo Gripper ensamblador de Engranes. • Electricidad, Potencia, Voltaje: -Dentro de un panel eléctrico el cual contara con los siguientes elementos: -Interruptor eléctrico principal fuera del panel. -Interruptor eléctrico del voltaje dentro del panel. -Suministro principal de aire, etc. 19 Ciclo de desarrollo para productos mecatrónicos Ajuste del Sistema de Control • UNIDAD DE ROBOT KRC: La unidad de control de robot KR C facilita la programación por medio de la interfaz de usuario Microsoft Windows. Es ampliable, se puede integrar en redes por medio de un bus y contiene paquetes de software preelaborados: todas ellas son opciones que marcarán el futuro de la automatización. Características de potencia: • Tecnología de PC abierta y compatible con redes • 2 puertos de enchufe libres para el uso de ejes adicionales • El equipamiento estándar incluye puertos de enchufe Device Net y Ethernet para los sistemas de bus habituales (p.ej. INTERBUS, PROFIBUS, DeviceNet) • Función de perfil de desplazamiento para obtener una óptima interacción entre los diferentes motores del robot y sus respectivas velocidades • Unidades de disquete y CD-ROM para el respaldo de datos • Tele diagnóstica vía Internet, entre otras posibilidades • Facilidad de manejo y de programación por medio del panel de control KRCControl-Panel (KCP) con Windows como interfaz de usuario • Armario de control compacto • El panel de control KRC-Control-Panel (KCP) tiene un diseño ergonómico. 20 Ciclo de desarrollo para productos mecatrónicos Prototipo Físico Rápido El prototipado rápido, podemos definirlo como la manera más rápida de obtener una réplica exacta tridimensional de un diseño generado mediante aplicación CAD en 3D. Estos modelos físicos pueden ser únicamente estéticos y útiles para el estudio del mercado potencial al que van dirigidos, o pueden cumplir con algunas o buena parte de los requerimientos mecánicos que tendría la pieza definitiva, ofreciendo en este caso la posibilidad de realizar pruebas funcionales y de homologación antes de que existan ni siquiera los moldes preliminares. En esta comunicación se pretende exponer las técnicas y tecnologías más actuales para la realización de dichos prototipos. 21 Ciclo de desarrollo para productos mecatrónicos Optimización del diseño El diseño de un sistema resistente en cualquier tipo de ingeniería consta de varias etapas que podrían ser resumidas en tres: Identificación de la lista de necesidades, selección y análisis de la tipología estructural y diseño de detalles estructurales. La etapa de definición y análisis de la estructura es habitualmente la más complicada en estructuras reales, que suelen poseer gran complejidad. Las herramientas que un diseñador puede disponer son distintas dependiendo de su ámbito de trabajo y de su nivel de experiencia, pero en conjunto pueden ser agrupadas en: Programas de análisis basados en elementos finitos o elementos de contorno. Utilización generalizada de ordenadores electrónicos. Amplia experiencia en las tipologías más usuales. Técnicas experimentales de apoyo. Del esquema indicado se desprenden las siguientes preguntas: Cómo elegir el diseño inicial. Cómo mejorar cada diseño intermedio. Cuando dar por terminado el proceso. La bondad del diseño inicial será función de la intuición y práctica del ingeniero en cuestión y de su experiencia en el problema que esté considerando. Por tanto, puede ser una decisión sencilla en problemas muy habituales y bastante complicado en aquellos casos que aparezcan por primera vez. El proceso suele darse por finalizado cuando un diseño satisface de manera suficientemente satisfactoria el plan de necesidades. El nivel del cumplimiento que se exige puede cambiar de unos casos a otros, y en ocasiones la premura de tiempo u otros factores ajenos pueden contribuir a dar por terminada la etapa de diseño. 22 Ciclo de desarrollo para productos mecatrónicos Técnicas de optimización para el diseño: Evolución de los métodos de optimización Tradicionalmente los métodos de prueba-error han sido ampliamente utilizados para el desarrollo de nuevos diseños. La fiabilidad y calidad del producto final es dependiente de la experiencia del diseñador Tendencia actual y desventajas: Actualmente, las simulaciones numéricas combinadas con el uso de técnicas de optimización son utilizadas durante la etapa de diseño para obtener productos de alta calidad en un plazo y coste competitivos. Las nuevas metodologías permiten, mediante la automatización del proceso de diseño utilizando simulaciones numéricas, predecir las características de funcionamiento del producto y las restricciones del problema, aumentar las evaluaciones sobre el producto, analizar múltiples diseños alternativos y adquirir mayor conocimiento sobre el producto. Ejemplo Juntas de gomas en cilindros maestros. 23 Ciclo de desarrollo para productos mecatrónicos Documentación Diseño - Robot Manipulador Yamaha FORD MC. Documentación del diseño 24 Ciclo de desarrollo para productos mecatrónicos Prototipos finales para evaluación y registro 25 Ciclo de desarrollo para productos mecatrónicos 26 Ciclo de desarrollo para productos mecatrónicos 27 Ciclo de desarrollo para productos mecatrónicos 28 Ciclo de desarrollo para productos mecatrónicos Escalado de la producción Resumen: El objetivo del siguiente trabajo es dimensionar el diseño de un robot manipulador el cual tendrá como objetivo el ensamblar engranes a dos tipos diferentes de motores dentro de la compañía FORD Motor Company esto con el fin de implementar y facilitar el proceso de desarrollo de los cigüeñales en el área de Diesel. Se mostrará todo el esquema tecnológico de su proceso, así como sus materiales y métodos. Introducción: Los robots manipuladores han sido proyectados con el objeto de eliminar los esfuerzos provocados por el levantamiento de la mercancía y están destinados a campos varios y diversificados. Se distinguen por la sencillez de uso y por su estructura resistente y sólida, características que otorgan a dichos productos un alto nivel de fiabilidad. Los robots manipuladores presentan una columna fijada al pavimento y provista de un brazo a bandera que incluye una cabeza de toma; están dotados de accionado neumático y no requieren ningún tipo de conexión eléctrica. Su sistema especial de alimentación permite al brazo girar 360° sin que se enmarañen por ello los tubos. Disponibles dos versiones: Tipo “PSC”: radio de acción = 5.000 mm. levantamiento = 80 kg. Tipo “SU”: radio de acción = 3.700 mm. levantamiento = 190 kg. Estos robots, son utilizados preferiblemente en los siguientes campos: Cajas, paquetes, embalajes con contenido vario Baldosas de cerámica Piedras naturales Productos refractarios Bolsas de polvos y granallas Artefactos sanitarios Aguas minerales Baterías Recipientes para pinturas y barnices Planchas de vidrio Manipulación de productos diversificados 29 Ciclo de desarrollo para productos mecatrónicos Materiales y métodos: Utilizaremos el aluminio ya que, debido a su alta conductividad térmica, el aluminio es difícil de calentar al principio. Una vez calentado, se funde a una temperatura menor. Esto puede hacer que el proceso de fabricación sea más difícil al soldar secciones gruesas a delgadas, debido a que el calor usualmente se absorbe en la sección más gruesa, lo que dificulta la fusión o unión de una sección más delgada. Suavidad del material. El aluminio es más suave que el acero y puede plantear retos para alimentar el electrodo de alambre. Los avances en los robots de brazo porta cables han ayudado a reducir varios problemas que plagaban la alimentación de alambre de aluminio en el pasado. Al igual que el aluminio utilizaremos la Fibra de Carbono, tenemos la suerte de estar ante un material que presenta oposición a los cambios bruscos de temperatura, es termoestable, y conserva su forma de forma eficiente. Además de ello, cuenta con excelentes propiedades ignífugas. Este material se comercializa en forma de tela y de piezas principalmente. Entre estas piezas encontramos los vinilos, los tubos y varillas, las planchas, etc. Todos ellos, se pueden encontrar de formas, tamaños, dimensiones y colores diferentes, además de en distintas calidades como pasa con todo. Hemos tratado las aplicaciones más comunes de la fibra de carbono. Pero también debemos saber que es utilizada para refuerzo de materiales como el plástico o como electrodo en grandes áreas. Incluso tiene usos menos conocidos como la filtración de gases. 30 Ciclo de desarrollo para productos mecatrónicos Optimización del Ciclo de Vida Podríamos definirlo como el proceso por el que atraviesa un determinado artículo de nuestro catálogo desde su lanzamiento hasta el fin de su utilidad comercial para el negocio. Para poder entender mejor cómo funciona hay que tener claro que nunca es lineal y que atraviesa cuatro fases diferenciadas entre sí. Introducción: Desde 1976, Yamaha ha proporcionado al mercado industrial robots de ensamblaje que son insuperables para la carga útil, la velocidad y la confiabilidad. La línea de productos de robots es la culminación de más de 4 décadas de experiencia en las plantas de Yamaha y en miles de otras en todo el mundo. Yamaha ofrece una amplia gama de modelos de un solo eje que ofrecen hasta 4000 mm de recorrido, con una carga útil máxima de 160 kg y una precisión repetible de +/- 0.005 mm. Además, también ofrecen una amplia selección de modelos SCARA con un alcance de 120 mm a 1200 mm y una carga útil máxima de 50 kg. Yamaha Robotics tiene la capacidad de proporcionar sistemas cartesianos en muchas configuraciones, así como modelos únicos de selección y colocación de alta velocidad YP de 2 ejes. Yamaha Robotics ofrece instrucciones complementarias (AOI) para los PLC y bloques de funciones (FB) de Allen Bradley para Siemens, software completo y archivos CAD 3D para simplificar el diseño y la instalación. Yamaha puede suministrar la mejor solución para casi cualquier requisito de montaje automatizado. Crecimiento: La productividad de las plantas se incrementará un 27% y los costes laborales se reducirán un 25% en el próximo lustro, algo imposible si la fuerza laboral estuviese formada exclusivamente por personas, y no por maquinaria inteligente. Las fábricas inteligentes experimentarán una reducción significativa de sus costes de explotación. Por ejemplo, según estimaciones del informe, un fabricante de automóviles podría mejorar hasta un 40% su margen operativo gracias a la reducción de los gastos logísticos y de materiales, el aumento de la eficiencia de los equipos y la mejora de la calidad productiva. 31 Ciclo de desarrollo para productos mecatrónicos Madurez: Siempre se llega a un momento en el que se toca techo, el producto progresivamente va desacelerando su crecimiento para entrar en una fase en la que está plenamente consolidado. Este es el periodo que consideramos de madurez y se da cuando las ventas alcanzan un nivel constante. Obviamente gran parte de tu público objetivo ya ha adquirido tu producto con lo que se va reduciendo el porcentaje que puedes llegar a captar. Esta fase conlleva un menor coste en promoción y posiblemente también hayas podido ajustar los costes de producción con lo que la prioridad debe ser mantener la cuota de mercado y ahí es donde se debe focalizar la estrategia. Como te enfrentas a un momento en el que otros competidores pueden estar en fase de crecimiento, tienes que buscar la máxima diferenciación ¿cuáles son esos puntos más fuertes: las auténticas ventajas competitivas? ¿Estás en condiciones de bajar el precio jugando con los márgenes para seguir resultando atractivo? ¿Se podría buscar un nuevo uso para tu “viejo” producto? ¿Podemos enganchar al público con nuevos atributos como, por ejemplo, la sostenibilidad? 32 Ciclo de desarrollo para productos mecatrónicos Declive: No hay que tener miedo a reconocer que un producto entra en la fase final de su ciclo de vida, de hecho, nos puede ahorrar mucho dinero y recursos ser capaces de hacerlo. Esto no quiere decir, en absoluto, que debamos despreciar esos productos que entran en esa fase de abandono marcada por la saturación del mercado. Podemos optimizar este momento del ciclo de vida también. En primer lugar, no hay que precipitarse, un producto en fase de declive sigue generando ingresos con lo que no hay necesariamente que retirarlo del mercado. Por lógica estás en un periodo en el que el coste de producción debería ser el más bajo de todo el ciclo de vida del producto, aprovecha esto. Cuando objetivamente veas que no da para más, tendrás que plantearte la decisión de si debes descatalogar el producto. Aunque también puedes “reinventarlo” añadiendo algún atributo extra realmente diferenciador o simplemente puedes incluirlo como complemento para añadir valor a otros productos nuevos (que también es una opción). Ciclo de vida de un producto: 33 Ciclo de desarrollo para productos mecatrónicos