1
11
Conjunto de
instrucciones THUMB
5
Resumen de formato
5-2
Opcode Summary
5-3
5.1
Formato 1: mover el registro desplazado
5-5
5.2
Formato 2: añadir/restar
Formato 3: mover/comparar/añadir/restar
inmediatamente
5-7
5.3
5.4
5.5
5.6
5.7
5.8
5.9
5-9
Formato 4: Operaciones ALU
Formato 5: Operaciones de registro/intercambio de
sucursales
5-11
Formato 6: carga relativa del PC
Formato 7: carga/almacén con desplazamiento de
registro
Formato 8: cargar/almacenar el signo extendido
byte/halfword
Formato 9: carga/almacenamiento con desplazamiento
inmediato
5-16
5-13
5-18
5-20
5-22
5.10 Formato 10: medio término de carga/almacenamiento
5-24
5.11 Formato 11: carga relativa/almacén SP
5-26
5.12 Formato 12: dirección de carga
5-28
5.13 Formato 13: agregar desplazamiento al puntero de pila
5-30
5.14 Formato 14: registros push/pop
5-32
5.15 Formato 15: carga/almacenamiento múltiple
5-34
5.16 Formato 16: rama condicional
5-36
5.17 Formato 17: interrupción de software
5-38
5.18 Formato 18: rama incondicional
5-39
5.19 Formato 19: rama larga con enlace
5-40
5.20 Instruction Set Examples
5-42
Acceso
Abierto
Este capítulo describe el conjunto de instrucciones THUMB.
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
5-1
Acceso
Abierto
Conjunto de instrucciones THUMB
Resumen de formato
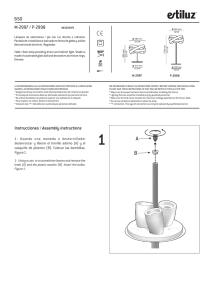
Los formatos de conjunto de instrucciones THUMB se muestran en la siguiente figura.
15
14
13
1
0
0
0
2
0
0
0
3
0
0
1
4
0
1
0
0
0
0
5
0
1
0
0
0
1
6
0
1
0
0
1
7
0
1
0
1
L
B
0
Ro
Rb
Rd
8
0
1
0
1
H
S
1
Ro
Rb
Rd
9
0
1
1
B
L
Offset5
Rb
Rd
10
1
0
0
0
L
Offset5
Rb
Rd
11
1
0
0
1
L
Rd
Word8
12
1
0
1
0
SP
Rd
Word8
13
1
0
1
1
0
0
0
0
14
1
0
1
1
L
1
0
R
15
1
1
0
0
L
16
1
1
0
1
17
1
1
0
1
1
18
1
1
1
0
0
19
12
11
10
9
Op
1
8
7
6
5
Offset5
1
I
Op
1
1
1
H
15
14
13
12
11
2
1
0
Mover el registro
desplazado
Rd
Op Rn/offset3
Rs
Rd
Rd
Offset8
Sumar/restar
Mover/comparar/añad
ir
/restar inmediata
Rs
Rd
Rs/Hs
Rd/Hd
ALU operaciones
Hola operaciones de
registro
/bolsa de sucursales
Op
Op
H1 H2
Word8
S
Dirección de carga
Agregar desplazamiento al
puntero de pila
Rlist
Rb
1
Carga relativa de PC
Cargar/almacenar con
registro
compensar
Ampliado el signo de
carga/almacenamiento
byte/mediapalabra
Carga/almacenamiento
con inmediata
compensar
Medio término de
carga/almacenamient
o
Carga relativa
SP/almacén
SWord7
Registros push/pop
Carga/almacenamient
o múltiple
Rlist
Cond
1
3
Rs
Rd
1
4
1
Soffset8
Rama condicional
Value8
Software Interrupt
Offset11
Rama incondicional
Compens
ar
10
9
8
7
6
5
4
Rama larga con
enlace
3
2
1
0
Figura 5-1: Formatos de conjunto de instrucciones THUMB
5-2
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
Conjunto de instrucciones
THUMB
Opcode Summary
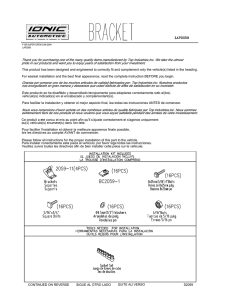
La siguiente tabla resume el conjunto de instrucciones THUMB. Para obtener
más información sobre una instrucción en particular, consulte las secciones
enumeradas en la columna de la derecha.
Nemotécnic
o
Instrucción
Lo register
Hi register
operando
operando
Véase la sección
Condición
siguiente:
conjunto de
códigos
Añadir con Llevar
5.4
SUMAR
Sumar
5.1.3, 5.5, 5.12, 5.13
Y
Y
5.4
ASR
Desplazamiento
aritmético a la derecha
5.1, 5.4
B
Rama incondicional
5.16
Bxx
Rama condicional
5.17
BIC
Poco claro
5.4
BL
Branch and Link
5.19
BX
Sucursal y Bolsa
5.5
CMN
Comparar Negativo
5.4
CMP
Comparar
5.3, 5.4, 5.5
EOR
EOR
5.4
LDMIA
Cargar múltiples
5.15
LDR
Palabra de carga
5.7, 5.6, 5.9, 5.11
LDRB
Byte de carga
5.7, 5.9
LDRH
Medio término de carga
5.8, 5.10
LSL
Desplazamiento lógico
a la izquierda
5.1, 5.4
LDSB
Señal de carga
extendida
byte
5.8
LDSH
Señal de carga
extendida
medio término
5.8
LSR
Desplazamiento lógico
a la derecha
5.1, 5.4
MOV
Registro de mudanzas
5.3, 5.5
MUL
Multiplicar
5.4
MVN
Mover registro negativo
5.4
Acceso
Abierto
ADC
Tabla 5-1: Opcodes del conjunto de instrucciones THUMB
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
5-3
Acceso
Abierto
Conjunto de instrucciones THUMB
Nemotécnic
o
Instrucción
Lo register
Hi register
operando
operando
Véase la sección
Condición
siguiente:
conjunto de
códigos
NEGATIVO
Negar
5.4
ORR
O
5.4
POP
Registros pop
5.14
EMPUJAR
Registros push
5.14
ROR
Girar a la derecha
5.4
SBC
Restar con Llevar
5.4
ESTEMIA
Almacenar múltiples
5.15
STR
Palabra de almacén
5.7, 5.9, 5.11
STRB
Almacenar byte
5.7
STRH
Término medio de
tienda
5.8, 5.10
SWI
Software Interrupt
5.17
SUBMARINO Restar
5.1.3, 5.3
TST
5.4
Trozos de prueba
Tabla 5-1: Opcodes del conjunto de instrucciones THUMB
(Continuación)
Los códigos de condición no se ven afectados por las
versiones de formato 5, 12 y 13 de esta instrucción.
Los códigos de condición no se ven afectados por la versión de
formato 5 de esta instrucción.
5-4
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
Conjunto de instrucciones
THUMB
5.1
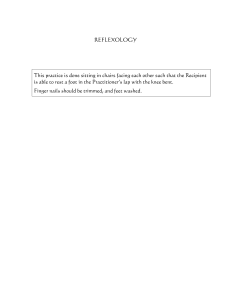
Formato 1: mover el registro desplazado
15
14
13
0
0
0
12
11
Op
10
9
8
7
6
Offset5
5
4
3
2
Rs
1
0
Rd
Registro de destino
Registro de fuentes
Valor inmediato
Opcode
Acceso
Abierto
0- LSL
1- LSR
2- ASR
Figura 5-2: Formato 1
5.1.1 Operación
Estas instrucciones mueven un valor desplazado entre los registros Lo. La sintaxis
del ensamblador THUMB se muestra en la Tabla 5-2: Resumen de las
instrucciones del formato 1.
Nota
Todas las instrucciones de este grupo establecen los códigos de condición CPSR.
OP
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE ARMAS
Acción
00
LSL Rd, Rs, #Offset5
MOVS Rd, Rs, LSL #Offset5
Mayús Rs por un valor inmediato de 5
bits
y almacenar el resultado en Rd.
01
LSR Rd, Rs, #Offset5
MOVS Rd, Rs, LSR #Offset5
10
ASR Rd, Rs, #Offset5
MOVS Rd, Rs, ASR #Offset5
Realizar desplazamiento lógico a la
derecha en Rs por un 5bit valor inmediato y almacenar el
resultado
en Rd.
Realizar desplazamiento aritmético a la
derecha en Rs por un
5-bit valor inmediato y almacenar el
dar lugar a Rd.
Cuadro 5-2: Resumen de las instrucciones del formato 1
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
5-5
Acceso
Abierto
Conjunto de instrucciones THUMB
5.1.2 Tiempos de ciclo de instrucción
Todas las instrucciones en este formato tienen una instrucción ARM equivalente
como se muestra en la Tabla 5-2: Resumen de las instrucciones de formato 1 en la
página 5-5. Los tiempos de ciclo de instrucción para la instrucción THUMB son
idénticos a los de la instrucción ARM equivalente. Para obtener más información
sobre los tiempos de los ciclos de instrucción, consulte el Capítulo 10, Operaciones
del ciclo de instrucción.
5.1.3 Ejemplos
LSR
R2, R5, #27
contenidos
; Desplazamiento lógico a la derecha de los
; de R5 por 27 y almacenar el resultado en
R2.
; Establezca los códigos de condición en el
resultado.
5-6
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
Conjunto de instrucciones
THUMB
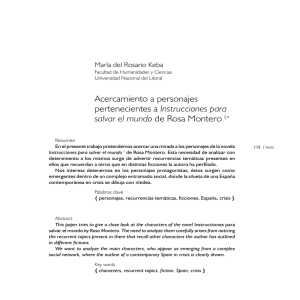
5.2 Formato 2: añadir/restar
15
14
13
12
11
10
0
0
0
1
1
I
9
Op
8
7
6
5
Rn/Offset3
4
3
2
Rs
1
0
Rd
Registro de destino
Registro de fuentes
Registro/
Valor inmediato
Opcode
0-ADD
1-SUB
Bandera inmediata
0 - Operando de registro
1 - Operando inmediato
Figura 5-3: Formato
2
5.2.1 Operación
Estas instrucciones permiten que el contenido de un registro Lo o un valor
inmediato de 3 bits se añada o reste de un registro Lo. La sintaxis del ensamblador
THUMB se muestra en la Tabla 5-3: Resumen de las instrucciones del formato 2.
Nota
Todas las instrucciones de este grupo establecen los códigos de condición CPSR.
Op
I
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE
ARMAS
Acción
0
0
ADD Rd, Rs, Rn
ADD Rd, Rs, Rn
Añadir contenido de Rn al contenido de Rs.
Lugar
dar lugar a Rd.
0
1
Agregar Rd, Rs,
#Offset3
Rd añade, Rs, #Offset3
Añadir un valor inmediato de 3 bits al
contenido de
Rs. Lugar resultado en Rd.
1
0
SUB Rd, Rs, Rn
Sub Rd, Rs, Rn
Restar el contenido de Rn del contenido de
Rs. Lugar resultado en Rd.
1
1
SUB Rd, Rs, #Offset3
Rd SUBS, Rs, Offset3
Restar el valor inmediato de 3 bits de
contenido de Rs. Lugar resultado en Rd.
Acceso
Abierto
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
5-7
Acceso
Abierto
Conjunto de instrucciones THUMB
5.2.2 Tiempos de ciclo de instrucción
Todas las instrucciones en este formato tienen una instrucción ARM equivalente
como se muestra en el cuadro 5-3: Resumen de las instrucciones de formato 2 en
la página 5-7. Los tiempos de ciclo de instrucción para la instrucción THUMB son
idénticos a los de la instrucción ARM equivalente. Para obtener más información
sobre los tiempos de los ciclos de instrucción, consulte el Capítulo 10, Operaciones
del ciclo de instrucción.
5.2.3 Ejemplos
SUMA
R
R0, R3, R4
SUBM
ARIN
O
R6, R2, #6
; R0 := R3 + R4 y establecer los códigos
de condición en
; el resultado.
R6 := R2 - 6 y establece los códigos de
; condición.
5-8
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
Conjunto de instrucciones
THUMB
5.3
Formato 3: mover/comparar/añadir/restar inmediatamente
15
14
13
0
0
1
12
11
Op
10
9
8
7
6
5
4
Rd
3
2
1
0
Offset8
Valor inmediato
Registro de origen/destino
Opcode
0- MOV
1- CMP
2- AÑADIR
3 SUBMARINO
Figura 5-4: Formato 3
Las instrucciones de este grupo realizan operaciones entre un registro Lo y un
valor inmediato de 8 bits.
La sintaxis del ensamblador THUMB se muestra en la Tabla 5-4: Resumen
de las instrucciones del formato 3.
Nota
Acceso
Abierto
5.3.1 Operaciones
Todas las instrucciones de este grupo establecen los códigos de condición CPSR.
Op
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE
ARMAS
Acción
00
Descargar MOV Rd,
#Offset8
MOVS Rd, #Offset8
Mueva el valor inmediato de 8 bits a Rd.
01
CMP Rd, #Offset8
CMP Rd, #Offset8
Compare el contenido de Rd con 8 bits
valor inmediato.
10
Rd ADD, #Offset8
Rd, Rd, #Offset8
11
SUB Rd, #Offset8
Rd, Rd, #Offset8
Agregar valor inmediato de 8 bits al
contenido de Rd
y colocar el resultado en Rd.
Restar el valor inmediato de 8 bits de
contenido de Rd y colocar el resultado en
Rd.
Cuadro 5-4: Resumen de las instrucciones del formato 3
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
5-9
Acceso
Abierto
Conjunto de instrucciones THUMB
5.3.2 Tiempos de ciclo de instrucción
Todas las instrucciones en este formato tienen una instrucción ARM equivalente
como se muestra en el cuadro 5-4: Resumen de las instrucciones de formato 3 en
la página 5-9. Los tiempos de ciclo de instrucción para la instrucción THUMB son
idénticos a los de la instrucción ARM equivalente. Para obtener más información
sobre los tiempos de los ciclos de instrucción, consulte el Capítulo 10, Operaciones
del ciclo de instrucción.
5.3.3 Ejemplos
MOV
R0, #128
CMP
R2, #62
SUMA
R
R1, #255
SUBM
ARIN
O
R6, #145
128 y establecer los
; R0 := códigos de condición
; Establecer los códigos
de condición en
R2-62
y
estable
; R1 := R1 + 255 cer
condición
;
códigos
y
estable
; R6 := R6 - 145 cer
condición
;
códigos
5-10
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
Conjunto de instrucciones
THUMB
5.4
Formato 4: Operaciones ALU
15
14
13
12
11
10
0
1
0
0
0
0
9
8
7
6
Op
5
4
3
2
Rs
1
0
Rd
Origen/destino
registro
Registro de fuentes 2
Opcode
Figura 5-5: Formato 4
5.4.1 Operación
Nota
Acceso
Abierto
Las siguientes instrucciones realizan operaciones ALU en un par de registros Lo.
Todas las instrucciones de este grupo establecen los códigos de condición CPSR.
OP
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE ARMAS
Acción
0000
Y Rd, Rs
Rd, Rd, Rs
Rd:= Rd y Rs
0001
EOR Rd, Rs
EORS Rd, Rd, Rs
Rd:= Rd EOR Rs
0010
LSL Rd, Rs
MOVS Rd, Rd, LSL Rs
Rd := Rd << Rs
0011
LSR Rd, Rs
MOVS Rd, Rd, LSR Rs
Rd := Rd >> Rs
0100
ASR Rd, Rs
MOVS Rd, Rd, ASR Rs
Rd := Rd ASR Rs
0101
ADC Rd, Rs
ADCS Rd, Rd, Rs
Rd := Rd + Rs + C-bit
0110
SBC Rd, Rs
SBCS Rd, Rd, Rs
Rd := Rd - Rs - NO C-bit
0111
ROR Rd, Rs
MOVS Rd, Rd, ROR Rs
Rd := Rd ROR Rs
1000
TST Rd, Rs
TST Rd, Rs
Establezca los códigos de condición en
Rd AND Rs
1001
NEG Rd, Rs
Rd RSBS, Rs, #0
Rd = -Rs
Cuadro 5-5: Resumen de las instrucciones del formato 4
Hoja de datos de ARM7TDMI
5-11
BRAZO DDI 0029E
Acceso
Abierto
Conjunto de instrucciones THUMB
OP
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE ARMAS
Acción
1010
CMP Rd, Rs
CMP Rd, Rs
Establecer códigos de condición en Rd Rs
1011
CMN Rd, Rs
CMN Rd, Rs
Establecer códigos de condición en Rd +
Rs
1100
ORR Rd, Rs
ORRS Rd, Rd, Rs
Rd := Rd o Rs
1101
MUL Rd, Rs
MULS Rd, Rs, Rd
Rd := Rs * Rd
1110
BIC Rd, Rs
BICS Rd, Rd, Rs
Rd := Rd Y NO Rs
1111
MVN Rd, Rs
MVNS Rd, Rs
Rd := NO Rs
Cuadro 5-5: Resumen de las instrucciones del formato 4
(continuación)
5.4.2 Tiempos de ciclo de instrucción
Todas las instrucciones en este formato tienen una instrucción ARM equivalente
como se muestra en el cuadro 5-5: Resumen de las instrucciones del formato 4 en
la página 5-11. Los tiempos de ciclo de instrucción para la instrucción THUMB son
idénticos a los de la instrucción ARM equivalente. Para obtener más información
sobre los tiempos de los ciclos de instrucción, consulte el Capítulo 10, Operaciones
del ciclo de instrucción.
5.4.3 Ejemplos
EOR
R3, R4
ROR
R1,
R0
NEGA
TIVO
R5,
R3
CMP
R2, R6
MUL
R0, R7
y establecer los códigos
;R3:=R3
EOR R4 de condición
; Girar a la
por el valor en R0,
derecha R1 almacenar
el resultado en R1 y
códigos de
; conjunto
condición
contenido
R3 a partir de
; Restar
el de
cero,
; almacenar el resultado en R5. Establecer
códigos de condición
; es decir R5 = -R3
;
Establece
códigos sobre el
r la
condición resultado
; R2 - R6
establecer códigos
; R0 := R7 * R0 y
de condición
de
5-12
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
Conjunto de instrucciones
THUMB
5.5
Formato 5: Operaciones de registro/intercambio de sucursales
15
14
13
12
11
10
0
1
0
0
0
1
9
8
Op
7
H1
6
H2
5
4
Rs/Hs
3
2
1
0
Rd/Hd
Registro de destino
Registro de fuentes
Hi operand bandera
2
Hi operand bandera
1
Opcode
5.5.1 Operación
Hay cuatro conjuntos de instrucciones en este grupo. Las tres primeras permiten
realizar operaciones ADD, CMP y MOV entre registros Lo y Hi, o un par de
registros Hi. El cuarto, BX, permite realizar una rama que también puede usarse
para cambiar el estado del procesador.
Acceso
Abierto
Figura 5-6: Formato 5
La sintaxis del ensamblador THUMB se muestra en la tabla 5-6: Resumen
de las instrucciones de formato 5
En este grupo solo CMP (Op = 01) establece los códigos de condición CPSR.
Nota
La acción de H1= 0, H2 = 0 para Op = 00 (ADD), Op = 01 (CMP) y Op = 10 (MOV)
no está definida y no debe usarse.
Op
H1
H2
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE
ARMAS
00
0
1
ADD Rd, Hs
ADD Rd, Rd, Hs
Añadir un registro en el rango 8-15 a un
Registro en el rango 0-7.
00
1
0
ADD Hd, Rs
Agregar Hd, Hd, Rs
Añadir un registro en el rango 0-7 a un
Registro en el rango 8-15.
00
1
1
ADD Hd, Hs
Agregar Hd, Hd, Hs
Añadir dos registros en el rango 8-15
Acción
Cuadro 5-6: Resumen de las instrucciones del formato 5
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
5-13
Acceso
Abierto
Conjunto de instrucciones THUMB
Op
H1
H2
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE
ARMAS
01
0
1
CMP Rd, Hs
CMP Rd, Hs
Comparar un registro en el rango 0-7
con un registro en el rango 8-15. Set
las banderas de código de condición en
el resultado.
01
1
0
CMP Hd, Rs
CMP Hd, Rs
Comparar un registro en el rango 8-15
con un registro en el rango 0-7.
Establecer el
Las banderas de código de condición en
el resultado.
01
1
1
CMP Hd, Hs
CMP Hd, Hs
Comparar dos registros en el rango 815. Establezca las banderas de código
de condición en el
resultado.
10
0
1
MOV Rd, Hs
MOV Rd, Hs
Mover un valor desde un registro en el
rango 8-15 a un registro en el rango 07.
10
1
0
MOV Hd, Rs
MOV Hd, Rs
Mover un valor desde un registro en el
rango 0-7 a un registro en el rango 8
15.
10
1
1
MOV Hd, Hs
MOV Hd, Hs
Mover un valor entre dos registros en
el rango 8-15.
11
0
0
BX Rs
BX Rs
Realizar rama (más estado opcional
cambio) a la dirección en un registro en
el
rango 0-7.
11
0
1
BX Hs
BX Hs
Realizar rama (más estado opcional
cambio) a la dirección en un registro en
el
rango 8-15.
Acción
Cuadro 5-6: Resumen de las instrucciones del formato 5
(continuación)
5.5.2 Tiempos de ciclo de instrucción
Todas las instrucciones en este formato tienen una instrucción ARM equivalente
como se muestra en la Tabla 5-6: Resumen de las instrucciones de formato 5 en la
página 5-13. Los tiempos de ciclo de instrucción para la instrucción THUMB son
idénticos a los de la instrucción ARM equivalente. Para obtener más información
sobre los tiempos de los ciclos de instrucción, consulte el Capítulo 10, Operaciones
del ciclo de instrucción.
5.5.3 La instrucción BX
BX realiza una rama a una rutina cuya dirección de inicio se especifica en un
registro Lo o Hi.
El bit 0 de la dirección determina el estado del procesador en la entrada a la rutina:
Bit 0 = 0
hace que el procesador entre en estado ARM.
Bit 0 = 1
hace que el procesador entre en estado THUMB.
N
o
t
a
5-14
La acción de H1 = 1 para esta instrucción es indefinida y no debe usarse.
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
Conjunto de instrucciones
THUMB
5.5.4 Ejemplos
Hola operaciones de registro
SUMAR
PC, R5
CMP
R4, R12
MOV
R15, R14
; PC := PC + R5 pero no establezca
el
; códigos de condición.
; Establecer los códigos de
condición en el
; resultado de R4 - R12.
; Mover R14 (LR) a R15 (PC)
; pero no establezca los códigos de
condición,
; por ejemplo. retorno de
subrutina.
Sucursal y bolsa
; Cambie de estado PULGAR a BRAZO.
MOV
BX
R1, fuera del THUMB
; Dirección de carga de outofTHUMB
; en R1.
R11,R1
R11
; Transferir el contenido de R11 a
; el PC.
; Bit 0 de R11 determina si
; Se introduce el estado ARM o
THUMB, es decir.
; Estado ARM aquí.
Acceso
Abierto
ADR
...
ALINEAR
CODE32
Fuera de la
THUMB
; Ahora procesando las instrucciones
ARM...
5.5.5 Uso de R15 como operando
Si R15 se usa como operando, el valor será la dirección de la instrucción + 4 con el
bit 0 borrado. Ejecutar un PC BX en estado THUMB desde una dirección no
alineada con palabras dará como resultado una ejecución impredecible.
Hoja de datos de ARM7TDMI
BRAZO DDI 0029E
5-15
Conjunto de instrucciones THUMB
5.6
Formato 6: carga relativa del PC
15
14
13
12
11
0
1
0
0
1
10
9
8
7
6
Rd
5
4
3
2
1
0
Word8
Valor inmediato
Registro de destino
Figura 5-7: Formato 6
5.6.1 Operación
Esta instrucción carga una palabra de una dirección especificada como un
desplazamiento inmediato de 10 bits desde el PC.
Acceso
Abierto
La sintaxis del ensamblador THUMB se muestra a continuación.
ENSAMBLADOR DE
PULGARES
EQUIVALENTE DE
ARMAS
LDR Rd, [PC, #Imm]
LDR Rd, [R15, #Imm]
Acción
Añadir desplazamiento sin firmar
(255 palabras,
1020 bytes) en Imm a la corriente
valor del PC. Cargar la palabra
de la dirección resultante en Rd.
Tabla 5-7: Resumen de la instrucción de carga relativa a PC
Nota
El valor especificado por #Imm es una dirección completa de 10 bits, pero siempre debe
estar alineado con palabras (es decir, con bits 1:0 establecidos en 0), ya que el
ensamblador coloca #Imm >> 2 en el campo Word8.
Note
The value of the PC will be 4 bytes greater than the address of this instruction, but
bit 1 of the PC is forced to 0 to ensure it is word aligned.
5-16
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.6.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-7: Summary of PC-relative load instruction on page 5-16. The instruction cycle
times for the THUMB instruction are identical to that of the equivalent ARM
instruction. For more information on instruction cycle times, please refer to Chapter
10, Instruction Cycle Operations.
5.6.3 Examples
LDR R3,[PC,#844]
; Load into R3 the word found at the
address formed by adding 844 to PC.
bit[1] of PC is forced to zero.
Note that the THUMB opcode will contain
211 as the Word8 value.
Open Access
;
;
;
;
ARM7TDMI Data Sheet
ARM DDI 0029E
5-17
THUMB Instruction Set
5.7
Format 7: load/store with register offset
15
14
13
12
11
10
9
0
1
0
1
L
B
0
8
7
6
Ro
5
4
Rb
3
2
1
0
Rd
Source/destination
register
Base register
Offset register
Open Access
Byte/Word flag
0 - Transfer word quantity
1 - Transfer byte quantity
Load/Store flag
0 - Store to memory
1 - Load from memory
Figure 5-8: Format 7
5.7.1 Operation
These instructions transfer byte or word values between registers and memory.
Memory addresses are pre-indexed using an offset register in the range 0-7.
The THUMB assembler syntax is shown in Table 5-8: Summary of format 7
instructions.
L
B
THUMB assembler
ARM equivalent
Action
0
0
STR Rd, [Rb, Ro]
STR Rd, [Rb, Ro]
Pre-indexed word store:
Calculate the target address by
adding together the value in Rb
and the value in Ro. Store the
contents of Rd at the address.
Table 5-8: Summary of format 7 instructions
5-18
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
L
B
THUMB assembler
ARM equivalent
Action
0
1
STRB Rd, [Rb, Ro]
STRB Rd, [Rb, Ro]
Pre-indexed byte store:
Calculate the target address by
adding together the value in Rb
and the value in Ro. Store the byte
value in Rd at the resulting
address.
1
0
LDR Rd, [Rb, Ro]
LDR Rd, [Rb, Ro]
Pre-indexed word load:
Calculate the source address by
adding together the value in Rb
and the value in Ro. Load the
contents of the address into Rd.
1
1
LDRB Rd, [Rb, Ro]
LDRB Rd, [Rb, Ro]
Pre-indexed byte load:
Calculate the source address by
adding together the value in Rb
and the value in Ro. Load the byte
value at the resulting address.
5.7.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-8: Summary of format 7 instructions on page 5-18. The instruction cycle times for
the THUMB instruction are identical to that of the equivalent ARM instruction. For
more information on instruction cycle times, please refer to Chapter 10, Instruction
Cycle Operations.
5.7.3 Examples
STR
R3, [R2,R6]
LDRB
R2, [R0,R7]
; Store word in R3 at the address
; formed by adding R6 to R2.
; Load into R2 the byte found at
; the address formed by adding
; R7 to R0.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-19
Open Access
Table 5-8: Summary of format 7 instructions (Continued)
THUMB Instruction Set
5.8
Format 8: load/store sign-extended byte/halfword
15
14
13
12
11
10
9
0
1
0
1
H
S
1
8
7
6
5
Ro
4
3
2
Rb
1
0
Rd
Destination register
Base register
Offset register
Open Access
Sign-extended flag
0 - Operand not sign-extended
1 - Operand sign-extended
H flag
Figure 5-9: Format 8
5.8.1 Operation
These instructions load optionally sign-extended bytes or halfwords, and store
halfwords. The THUMB assembler syntax is shown below.
S
H
THUMB assembler
ARM equivalent
Action
0
0
STRH Rd, [Rb, Ro]
STRH Rd, [Rb, Ro]
Store halfword:
Add Ro to base address in Rb. Store bits 015 of Rd at the resulting address.
0
1
LDRH Rd, [Rb, Ro]
LDRH Rd, [Rb, Ro]
Load halfword:
Add Ro to base address in Rb. Load bits 015 of Rd from the resulting address, and set
bits 16-31 of Rd to 0.
1
0
LDSB Rd, [Rb, Ro]
LDRSB Rd, [Rb, Ro]
Load sign-extended byte:
Add Ro to base address in Rb. Load bits 07 of Rd from the resulting address, and set
bits 8-31 of Rd to bit 7.
Table 5-9: Summary of format 8 instructions
5-20
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
S
H
THUMB assembler
ARM equivalent
Action
1
1
LDSH Rd, [Rb, Ro]
LDRSH Rd, [Rb, Ro]
Load sign-extended halfword:
Add Ro to base address in Rb. Load bits 015 of Rd from the resulting address, and set
bits 16-31 of Rd to bit 15.
Table 5-9: Summary of format 8 instructions (Continued)
5.8.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-9: Summary of format 8 instructions on page 5-20. The instruction cycle times for
the THUMB instruction are identical to that of the equivalent ARM instruction. For
more information on instruction cycle times, please refer to Chapter 10, Instruction
Cycle Operations.
5.8.3 Examples
R4, [R3, R0]; Store the lower 16 bits of R4 at the ;
address formed by adding R0 to R3.
LDSB
R2, [R7, R1]
; Load into R2 the sign extended byte
; found at the address formed by adding
; R1 to R7.
LDSH
R3, [R4, R2]
; Load into R3 the sign extended halfword
; found at the address formed by adding
; R2 to R4.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-21
Open Access
STRH
THUMB Instruction Set
5.9
Format 9: load/store with immediate offset
15
14
13
12
11
0
1
1
B
L
10
9
8
7
6
Offset5
5
4
Rb
3
2
1
0
Rd
Source/destination
register
Base register
Offset value
Open Access
Load/Store flag
0 - Store to memory
1 - Load from memory
Byte/Word flag
0 - Transfer word quantity
1 - Transfer byte quantity
Figure 5-10: Format 9
5.9.1 Operation
These instructions transfer byte or word values between registers and memory
using an immediate 5 or 7-bit offset.
The THUMB assembler syntax is shown in Table 5-10: Summary of format 9
instructions.
L
B
THUMB assembler
ARM equivalent
Action
0
0
STR Rd, [Rb, #Imm]
STR Rd, [Rb, #Imm]
Calculate the target address by
adding together the value in Rb
and Imm. Store the contents of Rd
at the address.
1
0
LDR Rd, [Rb, #Imm]
LDR Rd, [Rb, #Imm]
Calculate the source address by
adding together the value in Rb
and Imm. Load Rd from the
address.
Table 5-10: Summary of format 9 instructions
5-22
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
L
B
THUMB assembler
ARM equivalent
Action
0
1
STRB Rd, [Rb, #Imm]
STRB Rd, [Rb, #Imm]
Calculate the target address by
adding together the value in Rb
and Imm. Store the byte value in
Rd at the address.
1
1
LDRB Rd, [Rb, #Imm]
LDRB Rd, [Rb, #Imm]
Calculate source address by
adding together the value in Rb
and Imm. Load the byte value at
the address into Rd.
Table 5-10: Summary of format 9 instructions (Continued)
Note
For word accesses (B = 0), the value specified by #Imm is a full 7-bit address, but
must be word-aligned (ie with bits 1:0 set to 0), since the assembler places #Imm
>> 2 in the Offset5 field.
All instructions in this format have an equivalent ARM instruction as shown in Table
5-10: Summary of format 9 instructions on page 5-22. The instruction cycle times for
the THUMB instruction are identical to that of the equivalent ARM instruction. For
more information on instruction cycle times, please refer to Chapter 10, Instruction
Cycle Operations.
5.9.3 Examples
LDR
R2, [R5,#116]
; Load into R2 the word found at the
; address formed by adding 116 to R5.
; Note that the THUMB opcode will
; contain 29 as the Offset5 value.
STRB
R1, [R0,#13]
; Store the lower 8 bits of R1 at the
; address formed by adding 13 to R0.
; Note that the THUMB opcode will
; contain 13 as the Offset5 value.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-23
Open Access
5.9.2 Instruction cycle times
THUMB Instruction Set
5.10 Format 10: load/store halfword
15
14
13
12
11
1
0
0
0
L
10
9
8
7
6
5
Offset5
4
Rb
3
2
1
0
Rd
Source/destination
register
Base register
Immediate value
Open Access
Load/Store bit
0 - Store to memory
1 - Load from memory
Figure 5-11: Format 10
5.10.1 Operation
These instructions transfer halfword values between a Lo register and memory.
Addresses are pre-indexed, using a 6-bit immediate value.
The THUMB assembler syntax is shown in Table 5-11: Halfword data transfer
instructions.
L
THUMB assembler
ARM equivalent
Action
0
STRH Rd, [Rb, #Imm]
STRH Rd, [Rb, #Imm]
Add #Imm to base address in Rb and store
bits 0-15 of Rd at the resulting address.
1
LDRH Rd, [Rb, #Imm]
LDRH Rd, [Rb, #Imm]
Add #Imm to base address in Rb. Load bits
0-15 from the resulting address into Rd and
set bits 16-31 to zero.
Table 5-11: Halfword data transfer instructions
Note
5-24
#Imm is a full 6-bit address but must be halfword-aligned (ie with bit 0 set to 0) since
the assembler places #Imm >> 1 in the Offset5 field.
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.10.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-11: Halfword data transfer instructions on page 5-24. The instruction cycle times
for the THUMB instruction are identical to that of the equivalent ARM instruction.
For more information on instruction cycle times, please refer to Chapter 10,
Instruction Cycle Operations.
5.10.3 Examples
STRH
R6, [R1, #56]
; Store the lower 16 bits of R4 at
;
;
;
;
LDRH
R4, [R7, #4]
the address formed by adding 56
R1.
Note that the THUMB opcode will
contain 28 as the Offset5 value.
; Load into R4 the halfword found at
Open Access
; the address formed by adding 4 to R7.
; Note that the THUMB opcode will contain
; 2 as the Offset5 value.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-25
THUMB Instruction Set
5.11 Format 11: SP-relative load/store
15
14
13
12
11
1
0
0
1
L
10
9
8
7
6
5
Rd
4
3
2
1
0
Word8
Immediate value
Destination register
Load/Store bit
Open Access
0 - Store to memory
1 - Load from memory
Figure 5-12: Format 11
5.11.1 Operation
The instructions in this group perform an SP-relative load or store.The
THUMB assembler syntax is shown in the following table.
L
THUMB assembler
ARM equivalent
Action
0
STR Rd, [SP, #Imm]
STR Rd, [R13 #Imm]
Add unsigned offset (255 words, 1020
bytes) in Imm to the current value of the SP
(R7). Store the contents of Rd at the
resulting address.
1
LDR Rd, [SP, #Imm]
LDR Rd, [R13 #Imm]
Add unsigned offset (255 words, 1020
bytes) in Imm to the current value of the SP
(R7). Load the word from the resulting
address into Rd.
Table 5-12: SP-relative load/store instructions
Note
5-26
The offset supplied in #Imm is a full 10-bit address, but must always be word-aligned (ie
bits 1:0 set to 0), since the assembler places #Imm >> 2 in the Word8 field.
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.11.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-12: SP-relative load/store instructions on page 5-26. The instruction cycle times
for the THUMB instruction are identical to that of the equivalent ARM instruction.
For more information on instruction cycle times, please refer to Chapter 10,
Instruction Cycle Operations.
5.11.3 Examples
STR
R4, [SP,#492]
; Store the contents of R4 at the address
Open Access
; formed by adding 492 to SP (R13).
; Note that the THUMB opcode will contain
; 123 as the Word8 value.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-27
THUMB Instruction Set
5.12 Format 12: load address
15
14
13
12
11
1
0
1
0 SP
10
9
8
7
6
Rd
5
4
3
2
1
0
Word8
8-bit unsigned constant
Destination register
Source
0-PC
1-SP
Figure 5-13: Format 12
5.12.1 Operation
Open Access
These instructions calculate an address by adding an 10-bit constant to either the
PC or the SP, and load the resulting address into a register.
The THUMB assembler syntax is shown in the following table.
SP
THUMB assembler
ARM equivalent
Action
0
ADD Rd, PC, #Imm
ADD Rd, R15, #Imm
Add #Imm to the current value of
the program counter (PC) and load
the result into Rd.
1
ADD Rd, SP, #Imm
ADD Rd, R13, #Imm
Add #Imm to the current value of
the stack pointer (SP) and load the
result into Rd.
Table 5-13: Load address
Note
The value specified by #Imm is a full 10-bit value, but this must be word-aligned (ie
with bits 1:0 set to 0) since the assembler places #Imm >> 2 in field Word8.
Where the PC is used as the source register (SP = 0), bit 1 of the PC is always
read as 0. The value of the PC will be 4 bytes greater than the address of the
instruction before bit 1 is forced to 0.
The CPSR condition codes are unaffected by these instructions.
5-28
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.12.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table 5-13:
Load address on page 5-28. The instruction cycle times for the THUMB instruction are
identical to that of the equivalent ARM instruction. For more information on instruction
cycle times, please refer to Chapter 10, Instruction Cycle Operations.
5.12.3 Examples
ADD
R2, PC, #572
; R2 := PC + 572, but don't set the
;
;
;
;
ADD
R6, SP, #212
condition codes. bit[1] of PC is
forced to zero.
Note that the THUMB opcode will
contain 143 as the Word8 value.
; R6 := SP (R13) + 212, but don't
Open Access
; set the condition codes.
; Note that the THUMB opcode will
; contain 53 as the Word8 value.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-29
THUMB Instruction Set
5.13 Format 13: add offset to Stack Pointer
15
14
1
13
0
1
12
1
11
10
0
0
9
0
8
0
7
6
5
S
4
3
2
1
0
SWord7
7-bit immediate value
Sign flag
0 -Offset is positive
1 -Offset is negative
Figure 5-14: Format 13
5.13.1 Operation
Open Access
This instruction adds a 9-bit signed constant to the stack pointer. The following
table shows the THUMB assembler syntax.
S
THUMB assembler
ARM equivalent
Action
0
ADD SP, #Imm
ADD R13, R13, #Imm
Add #Imm to the stack pointer (SP).
1
ADD SP, #-Imm
SUB R13, R13, #Imm
Add #-Imm to the stack pointer (SP).
Table 5-14: The ADD SP instruction
Note
The offset specified by #Imm can be up to -/+ 508, but must be word-aligned (ie with
bits 1:0 set to 0) since the assembler converts #Imm to an 8-bit sign + magnitude
number before placing it in field SWord7.
Note
The condition codes are not set by this instruction.
5.13.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-14: The ADD SP instruction on page 5-30. The instruction cycle times for the
THUMB instruction are identical to that of the equivalent ARM instruction. For more
information on instruction cycle times, please refer to Chapter 10, Instruction Cycle
Operations
5-30
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.13.3 Examples
ADD
SP, #268
; SP (R13) := SP + 268, but don't set
; the condition codes.
; Note that the THUMB opcode will
; contain 67 as the Word7 value and S=0.
ADD
SP, #-104
; SP (R13) := SP - 104, but don't set
Open Access
; the condition codes.
; Note that the THUMB opcode will contain
; 26 as the Word7 value and S=1.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-31
THUMB Instruction Set
5.14 Format 14: push/pop registers
15
14
13
12
11
10
9
8
1
0
1
1
L
1
0
R
7
6
5
4
3
2
1
0
Rlist
Register list
PC/LR bit
0 - Do not store LR/load PC
1 - Store LR/Load PC
Load/Store bit
0 - Store to memory
1 - Load from memory
Open Access
Figure 5-15: Format 14
5.14.1 Operation
The instructions in this group allow registers 0-7 and optionally LR to be pushed
onto the stack, and registers 0-7 and optionally PC to be popped off the stack.
The THUMB assembler syntax is shown in Table 5-15: PUSH and POP instructions.
Note
The stack is always assumed to be Full Descending.
L
R
THUMB assembler
ARM equivalent
Action
0
0
PUSH { Rlist }
STMDB R13!, { Rlist }
Push the registers specified by
Rlist onto the stack. Update the
stack pointer.
0
1
PUSH { Rlist, LR }
STMDB R13!, { Rlist, R14 }
Push the Link Register and the
registers specified by Rlist (if any)
onto the stack. Update the stack
pointer.
1
0
POP { Rlist }
LDMIA R13!, { Rlist }
Pop values off the stack into the
registers specified by Rlist. Update
the stack pointer.
1
1
POP { Rlist, PC }
LDMIA R13!, { Rlist, R15 }
Pop values off the stack and load
into the registers specified by Rlist.
Pop the PC off the stack. Update
the stack pointer.
Table 5-15: PUSH and POP instructions
5-32
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.14.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-15: PUSH and POP instructions on page 5-32. The instruction cycle times for the
THUMB instruction are identical to that of the equivalent ARM instruction. For more
information on instruction cycle times, please refer to Chapter 10, Instruction Cycle
Operations.
5.14.3 Examples
PUSH
{R0-R4,LR}
; Store R0,R1,R2,R3,R4 and R14 (LR) at
;
;
;
;
POP
{R2,R6,PC}
the stack pointed to by R13 (SP) and
update R13.
Useful at start of a sub-routine to
save workspace and return address.
; Load R2,R6 and R15 (PC) from the stack
Open Access
; pointed to by R13 (SP) and update R13.
; Useful to restore workspace and return
; from sub-routine.
ARM7TDMI Data Sheet
ARM DDI 0029E
5-33
THUMB Instruction Set
5.15 Format 15: multiple load/store
15
14
13
12
11
1
1
0
0
L
10
9
8
7
6
Rb
5
4
3
2
1
0
Rlist
Register list
Base register
Load/Store bit
0 - Store to memory
1 - Load from memory
Figure 5-16: Format 15
5.15.1 Operation
Open Access
These instructions allow multiple loading and storing of Lo registers. The
THUMB assembler syntax is shown in the following table.
L
THUMB assembler
ARM equivalent
Action
0
STMIA Rb!, { Rlist }
STMIA Rb!, { Rlist }
Store the registers specified by
Rlist, starting at the base address
in Rb. Write back the new base
address.
1
LDMIA Rb!, { Rlist }
LDMIA Rb!, { Rlist }
Load the registers specified by
Rlist, starting at the base address
in Rb. Write back the new base
address.
Table 5-16: The multiple load/store instructions
5.15.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-16: The multiple load/store instructions on page 5-34. The instruction cycle times
for the THUMB instruction are identical to that of the equivalent ARM instruction. For
more information on instruction cycle times, please refer to Chapter 10, Instruction
Cycle Operations
5-34
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.15.3 Examples
STMIA R0!, {R3-R7}
; Store the contents of registers R3-R7
starting at the address specified in
R0, incrementing the addresses for each
word.
Write back the updated value of R0.
Open Access
;
;
;
;
ARM7TDMI Data Sheet
ARM DDI 0029E
5-35
THUMB Instruction Set
5.16 Format 16: conditional branch
15
14
13
12
1
1
0
1
11
10
9
8
7
6
Cond
5
4
3
2
1
0
SOffset8
8-bit signed immediate
Condition
Figure 5-17: Format 16
5.16.1 Operation
Open Access
The instructions in this group all perform a conditional Branch depending on the state of
the CPSR condition codes. The branch offset must take account of the prefetch
operation, which causes the PC to be 1 word (4 bytes) ahead of the current instruction.
The THUMB assembler syntax is shown in the following table.
Cond
THUMB assembler
ARM equivalent
Action
0000
BEQ label
BEQ label
Branch if Z set (equal)
0001
BNE label
BNE label
Branch if Z clear (not equal)
0010
BCS label
BCS label
Branch if C set (unsigned higher or
same)
0011
BCC label
BCC label
Branch if C clear (unsigned lower)
0100
BMI label
BMI label
Branch if N set (negative)
0101
BPL label
BPL label
Branch if N clear (positive or zero)
0110
BVS label
BVS label
Branch if V set (overflow)
0111
BVC label
BVC label
Branch if V clear (no overflow)
1000
BHI label
BHI label
Branch if C set and Z clear
(unsigned higher)
1001
BLS label
BLS label
Branch if C clear or Z set
(unsigned lower or same)
Table 5-17: The conditional branch instructions
5-36
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
Cond
THUMB assembler
ARM equivalent
Action
1010
BGE label
BGE label
Branch if N set and V set, or N
clear and V clear (greater or
equal)
1011
BLT label
BLT label
Branch if N set and V clear, or N
clear and V set (less than)
1100
BGT label
BGT label
Branch if Z clear, and either N set
and V set or N clear and V clear
(greater than)
1101
BLE label
BLE label
Branch if Z set, or N set and V
clear, or N clear and V set (less
than or equal)
Note
While label specifies a full 9-bit two’s complement address, this must always be
halfword-aligned (ie with bit 0 set to 0) since the assembler actually places label >>
1 in field SOffset8.
Note
Cond = 1110 is undefined, and should not be used.
Cond = 1111 creates the SWI instruction: see 5.17 Format 17: software interrupt on
page 5-38.
5.16.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table
5-17: The conditional branch instructions on page 5-36. The instruction cycle times
for the THUMB instruction are identical to that of the equivalent ARM instruction.
For more information on instruction cycle times, please refer to Chapter 10,
Instruction Cycle Operations
5.16.3 Examples
over
CMP R0, #45
BGT over
...
...
...
...
...
ARM7TDMI Data Sheet
ARM DDI 0029E
; Branch to ’over’ if R0 > 45.
; Note that the THUMB opcode will contain
; the number of halfwords to offset.
; Must be halfword aligned.
5-37
Open Access
Table 5-17: The conditional branch instructions (Continued)
THUMB Instruction Set
5.17 Format 17: software interrupt
15
14
13
12
11
10
9
8
1
1
0
1
1
1
1
1
7
6
5
4
3
2
1
0
Value8
Comment field
Figure 5-18: Format 17
5.17.1 Operation
The SWI instruction performs a software interrupt. On taking the SWI, the processor
switches into ARM state and enters Supervisor (SVC) mode.
Open Access
The THUMB assembler syntax for this instruction is shown below.
THUMB assembler
ARM equivalent
Action
SWI Value8
SWI Value8
Perform Software Interrupt:
Move the address of the next instruction
into LR, move CPSR to SPSR, load the SWI
vector address (0x8) into the PC. Switch to
ARM state and enter SVC mode.
Table 5-18: The SWI instruction
Note
Value8 is used solely by the SWI handler: it is ignored by the processor.
5.17.2 Instruction cycle times
All instructions in this format have an equivalent ARM instruction as shown in Table 518: The SWI instruction on page 5-38. The instruction cycle times for the THUMB
instruction are identical to that of the equivalent ARM instruction. For more information
on instruction cycle times, please refer to Chapter 10, Instruction Cycle Operations
5.17.3 Examples
SWI 18
; Take the software interrupt exception.
; Enter Supervisor mode with 18 as the
; requested SWI number.
5-38
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.18 Format 18: unconditional branch
15
14
13
12
11
1
1
1
0
0
10
9
8
7
6
5
4
3
2
1
0
Offset11
Immediate value
Figure 5-19: Format 18
This instruction performs a PC-relative Branch. The THUMB assembler syntax is
shown below. The branch offset must take account of the prefetch operation,
which causes the PC to be 1 word (4 bytes) ahead of the current instruction.
THUMB assembler
ARM equivalent
Action
B label
BAL label (halfword
offset)
Branch PC relative +/- Offset11 << 1, where
label is PC +/- 2048 bytes.
Table 5-19: Summary of Branch instruction
Note
The address specified by label is a full 12-bit two’s complement address, but must
always be halfword aligned (ie bit 0 set to 0), since the assembler places label >> 1
in the Offset11 field.
5.18.2 Examples
here
B here
B jimmy
...
jimmy
...
ARM7TDMI Data Sheet
ARM DDI 0029E
;
;
;
;
;
;
;
;
Branch onto itself.
Assembles to 0xE7FE.
(Note effect of PC offset).
Branch to 'jimmy'.
Note that the THUMB opcode will
contain the number of halfwords
to offset.
Must be halfword aligned.
5-39
Open Access
5.18.1 Operation
THUMB Instruction Set
5.19 Format 19: long branch with link
15
14
13
12
11
1
1
1
1
H
10
9
8
7
6
5
4
3
2
1
0
Offset
Long branch and link offset high/low
Low/high offset bit
0 - offset high
1 - offset low
Figure 5-20: Format 19
5.19.1 Operation
This format specifies a long branch with link.
Open Access
The assembler splits the 23-bit two’s complement half-word offset specifed by the
label into two 11-bit halves, ignoring bit 0 (which must be 0), and creates two
THUMB instructions.
Instruction 1 (H = 0)
In the first instruction the Offset field contains the upper 11 bits of the target
address. This is shifted left by 12 bits and added to the current PC address. The
resulting address is placed in LR.
Instruction 2 (H =1)
In the second instruction the Offset field contains an 11-bit representation lower half
of the target address. This is shifted left by 1 bit and added to LR. LR, which now
contains the full 23-bit address, is placed in PC, the address of the instruction
following the BL is placed in LR and bit 0 of LR is set.
The branch offset must take account of the prefetch operation, which causes the PC
to be 1 word (4 bytes) ahead of the current instruction
5-40
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.19.2 Instruction cycle times
This instruction format does not have an equivalent ARM instruction. For details of
the instruction cycle times, please refer to Chapter 10, Instruction Cycle Operations.
H
THUMB assembler
ARM equivalent
Action
0
BL label
none
LR := PC + OffsetHigh << 12
1
temp := next instruction address
PC := LR + OffsetLow << 1
LR := temp | 1
Table 5-20: The BL instruction
5.19.3 Examples
BL faraway
...
faraway ...
ARM7TDMI Data Sheet
ARM DDI 0029E
; Unconditionally Branch to 'faraway'
; and place following instruction
;
;
;
;
;
;
address, ie ’next’, in R14,the Link
Register and set bit 0 of LR high.
Note that the THUMB opcodes will
contain the number of halfwords to
offset.
Must be Half-word aligned.
Open Access
next
5-41
THUMB Instruction Set
5.20 Instruction Set Examples
The following examples show ways in which the THUMB instructions may be used
to generate small and efficient code. Each example also shows the ARM equivalent
so these may be compared.
5.20.1 Multiplication by a constant using shifts and adds
The following shows code to multiply by various constants using 1, 2 or 3 Thumb
instructions alongside the ARM equivalents. For other constants it is generally
better to use the built-in MUL instruction rather than using a sequence of 4 or more
instructions.
Open Access
Thumb
ARM
1
Multiplicación por 2 n (1,2,4,8,...)
LSL Ra, Rb, LSL #n
MOV Ra, Rb, LSL #n
2
Multiplicación por 2 n+1 (3,5,9,17,...)
LSL Rt, Rb, #n
ADD Ra, Rb, Rb, LSL #n
ADD Ra, Rt, Rb
3
Multiplicación por 2 n-1 (3,7,15,...)
LSL Rt, Rb, #n
RSB Ra, Rb, Rb, LSL #n
SUB Ra, Rt, Rb
4
Multiplicación por -2 n (-2, -4, -8, ...)
LSL Ra, Rb, #n
MOV Ra, Rb, LSL #n
MVN Ra, Ra
RSB Ra, Ra, #0
5
Multiplicación por -2 n-1 (-3, -7, -15, ...)
LSL Rt, Rb, #n
SUB Ra, Rb, Rb, LSL #n
SUB Ra, Rb, Rt
6
Multiplicación por cualquier C = {2 n+1, 2 n-1, -2 n o -2 n-1} * 2 n
Effectively this is any of the multiplications in 2 to 5 followed by a final shift.
This allows the following additional constants to be multiplied.
6, 10, 12, 14, 18, 20, 24, 28, 30, 34, 36, 40, 48, 56, 60, 62 .....
5-42
(2..5)
(2..5)
LSL Ra, Ra, #n
MOV Ra, Ra, LSL #n
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
5.20.2 General purpose signed divide
This example shows a general purpose signed divide and remainder routine in
both Thumb and ARM code.
Thumb code
signed_divide
; Signed divide of R1 by R0: returns quotient in R0,
; remainder in R1
; Get abs
ASR
EOR
SUB
value of R0 into R3
R2, R0, #31 ; Get 0 or -1 in R2 depending on sign of R0
R0, R2
; EOR with -1 (0xFFFFFFFF) if negative
R3, R0, R2 ; and ADD 1 (SUB -1) to get abs value
; SUB always sets flag so go & report division by 0 if necessary
BEQ divide_by_zero
; Get abs value of R1 by xoring with 0xFFFFFFFF and adding 1
; if negative
ASR R0, R1, #31 ; Get 0 or -1 in R3 depending on sign of R1
EOR R1, R0
; EOR with -1 (0xFFFFFFFF) if negative
SUB R1, R0
; and ADD 1 (SUB -1) to get abs value
; Save signs (0 or -1 in R0 & R2) for later use in determining
; sign of quotient & remainder.
PUSH {R0, R2}
; Justification, shift 1 bit at a time until divisor (R0 value)
; is just <= than dividend (R1 value). To do this shift dividend
; right by 1 and stop as soon as shifted value becomes >.
LSR R0, R1, #1
MOV R2, R3
B
%FT0
just_l
LSL
0
CMP
BLS
R2, #1
R2, R0
just_l
MOV
B
R0, #0
%FT0
div_l
LSR
0
CMP
BCC
SUB
R2, #1
R1, R2
%FT0
R1, R2
ARM7TDMI Data Sheet
ARM DDI 0029E
; Set accumulator to 0
; Branch into division loop
; Test subtract
; If successful do a real
; subtract
5-43
Open Access
;
THUMB Instruction Set
0
CMP
BNE
ADC
R2, R3
div_l
R0, R0; Shift result and add 1 if
; subtract succeeded
; Terminate when R2 == R3 (ie we have just
; tested subtracting the 'ones' value).
; Now fixup the signs of the quotient (R0) and remainder (R1)
POP
{R2, R3} ; Get dividend/divisor signs back
EOR
EOR
SUB
R3, R2
R0, R3
R0, R3
; Result sign
; Negate if result sign = -1
EOR
SUB
R1, R2
R1, R2
; Negate remainder if dividend sign = -1
MOV
pc, lr
ARM code
Open Access
signed_divide
; effectively
ANDS
RSBMI
EORS
; ip bit 31 =
; ip bit 30 =
RSBCS
zero a4
a4, a1,
a1, a1,
ip, a4,
sign of
sign of
a2, a2,
as top bit will be shifted out later
#&80000000
#0
a2, ASR #32
result
a2
#0
; central part is identical code to udiv
; (without MOV a4, #0 which comes for free as part of signed
; entry sequence)
MOVS
a3, a1
BEQ
divide_by_zero
just_l
; justification stage shifts 1 bit at a time
CMP
a3, a2, LSR #1
MOVLS
a3, a3, LSL #1
; NB: LSL #1 is always OK if LS succeeds
BLOs_loop
div_l
5-44
CMP
ADC
SUBCS
a2, a3
a4, a4, a4
a2, a2, a3
TEQ
MOVNE
a3, a1
a3, a3, LSR #1
ARM7TDMI Data Sheet
ARM DDI 0029E
THUMB Instruction Set
BNE
MOV
s_loop2
a1, a4
MOVS
RSBCS
RSBMI
ip, ip, ASL #1
a1, a1, #0
a2, a2, #0
MOV
pc, lr
5.20.3 Division by a constant
Division by a constant can often be performed by a short fixed sequence of shifts,
adds and subtracts. For an explanation of the algorithm see The ARM Cookbook
(ARM DUYI-0005B), section entitiled Division by a constant.
Here is an example of a divide by 10 routine based on the algorithm in the
ARM Cookbook in both Thumb and ARM code.
Thumb code
ARM7TDMI Data Sheet
ARM DDI 0029E
Open Access
udiv10
; takes argument in a1
; returns quotient in a1, remainder in a2
MOV
a2, a1
LSR
a3, a1, #2
SUB
a1, a3
LSR
a3, a1, #4
ADD
a1, a3
LSR
a3, a1, #8
ADD
a1, a3
LSR
a3, a1, #16
ADD
a1, a3
LSR
a1, #3
ASL
a3, a1, #2
ADD
a3, a1
ASL
a3, #1
SUB
a2, a3
CMP
a2, #10
BLT
%FT0
ADD
a1, #1
SUB
a2, #10
0
MOV
pc, lr
5-45
THUMB Instruction Set
ARM code
remainder in a2
lsr
lsr
lsr
lsr
#3
asl
asl
#2
#4
#8
#16
#2
#1
Open Access
udiv10
; takes argument in a1
; returns quotient in a1,
SUB
a2, a1, #10
SUB
a1, a1, a1,
ADD
a1, a1, a1,
ADD
a1, a1, a1,
ADD
a1, a1, a1,
MOV
a1, a1, lsr
ADD
a3, a1, a1,
SUBS
a2, a2, a3,
ADDPL
a1, a1, #1
ADDMI
a2, a2, #10
MOV
pc, lr
5-46
ARM7TDMI Data Sheet
ARM DDI 0029E