Simulación de procesos y optimización
Anuncio

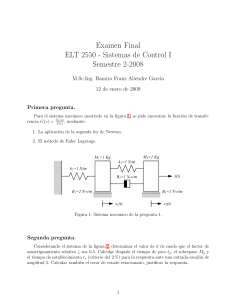
1.1 CUESTIÓN Q1 a) Para el modelo combinado representado en la Ilustración 1 obténgase el tiempo medio de residencia global, así como la funciones E(t) y E() obtenidas a partir de la respuesta F(t) a un escalón unitario. Vp1 Q Vp2 Q2 Ilustración 1. Reactores pistón en paralelo b) Para una reacción de orden mayor que uno, ¿qué expresión proporcionaría un límite superior para la conversión de salida del sistema del apartado b? a) Q Q1 Q 2 En un reactor pistón la salida es igual a la entrada desplazada en el tiempo con un retraso igual al tiempo de residencia. Por la tanto las respuestas de cada uno de los elementos a un escalón C0·U(t) son: t1 t2 C 1 t C 0 U t t 1 C 2 t C 0 U t t 2 V p1 Q1 V p2 Q2 Y las respuestas a un escalón unitario son: F1 t F 2 t C 1 t C0 C 2 t C0 U t t1 U t t2 La respuesta global al escalón se obtiene a partir de un balance para el componente en el nudo previo a la salida: C0 Q V p1 Q1 C0 Q C0 Q C1 Q Cs Q Q Q2 V p2 C2 Q Q C s t Q 1 C 1 t Q 2 C 2 t Dividiendo por C0 y Q: C s t Q 1 C 1 t Q 2 C 2 t Q C 0 Q C 0 C0 Q1 F t Q F1 t Q2 Q F 2 t La respuesta al impulso es la derivada de la respuesta al escalón: E t dF t dt Aplicando que la derivada de la función escalón es a su vez la función impulso o delta de Dirac: E t E t Q1 Q t t2 Q2 Vp 2 t Q Q2 t t1 Vp 1 t Q Q1 Q1 Q2 Q El tiempo de residencia total es: t V Q V1 V 2 Q1 Q 2 Como las funciones que aparecen son impulso (funciones indeterminadas, pero un valor de área claro) no debemos aplicar la expresión t E t t E t E deducida para la relación entre diferenciales de área en con funciones con valor finito. En este caso las partes asociadas a la función impulso no precisan de la multiplicación por el tiempo de residencia, como se puede ver: E t t t 1 Q1 Q Q1 Q Q1 Q Q1 Q t Q2 Q t t 2 t1 Q2 t2 t t Q t t1 Q2 t2 t Q t 1 Q2 Q 2 E