Área de Ingeniería Aeroespacial
Flight mechanics
4º
3.1. Longitudinal static stability and control
References:
•
•
•
Gómez Tierno M.A., Pérez Cortés M., and Puentes Márquez C., Mecánica del
vuelo, 2, Ibergarceta Publicaciones S.L., 2012, España
Rivas Rivas D. Mecánica del vuelo. Catedrático de Ingeniería Aeroespacial.
Departamento de Ingeniería Aeroespacial y Mecánica de Fluidos. Universidad
de Sevilla
(not published) Llamas R. Flight Mechanics. Professor of Universidad Europea
de Madrid.
1
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Contents.
•
•
•
•
•
•
Introduction
Total lift
Total pitch moment
Index of longitudinal static stability with fixed controls
Methods for longitudinal control
Deflection of elevator for equilibrium (trim)
2
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Introduction
Stability
Control
Static
Dynamic
Longitudinal
Lateral-directional
3
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Introduction
•
•
•
•
•
Study of major aircraft motion of rotations around the center of mass
To go further, study of aircraft minor motion of rotating and articulated
subsystems
Center of mass trajectory under translational momentum theorem and aircraft
attitude under rotational momentum theorem independently separated
study of “performances” and “stability and control”
The effect of control surface deflection is negligible for external forces but not
for moments
For aircraft with conventional configuration and symmetrical plane, motion can
be brokedown in
– longitudinal
– lateral-directional
4
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Introduction
•
•
•
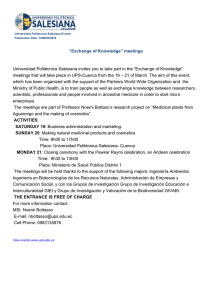
Angular velocity of aircraft about body axes
𝑥𝑏 , 𝑦𝑏 , 𝑧𝑏 is defined by 𝒑, 𝒒, 𝒓, respectively.
Defection angles of ailerons, elevator and
rudder are 𝜹𝒂 , 𝜹𝒆 , 𝜹𝒓 , respectively.
Longitudinal motion: lateral and directional
variables are null 𝜷, 𝝓, 𝒑, 𝒓, 𝜹𝒂 , 𝜹𝒓 = 𝟎
– Equation of forces along 𝑥𝑏 , 𝑧𝑏
– Equation of moments about 𝑦𝑏
•
Lateral-directional motion: some of lateral
and directional variables are not null
𝛽, 𝜙, 𝑝, 𝑟, 𝛿𝑎 , 𝛿𝑟
– All equations of forces and moments to be
used
•
Application line of thrust on center of
gravity: aircraft as glider
5
3.1. Longitudinal static stability and control
Introduction
Área de Ingeniería Aeroespacial
•
The static stability of a system is its ability to return to a configuration of
equilibrium after a perturbation
6
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Total lift. Hypothesis
•
•
•
•
•
•
Total lift and total pitch moment can be calculated as the addition of
contributions of different aircraft parts and interferences linear functions of
angle of attack.
Parts: Wing (w), fuselage (b), and horizontal stabilizer (t)
Wing and fuselage together in wing-fuselage set (wb)
Zero lift line of wing-fuselage (LSNwb) and zero lift line of tail (LSNt) through
corresponding aerodynamic centers
Aerodynamic loads for each surface:
– Lift: 𝐿𝑤𝑏 , 𝐿𝑡
– Drag: 𝐷𝑤𝑏 , 𝐷𝑡
– Pitch moment: 𝑀𝑎𝑐,𝑤𝑏 , 𝑀𝑎𝑐,𝑡
Moment about the aerodynamic center does not depend on angle of attack
7
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
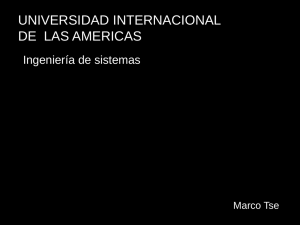
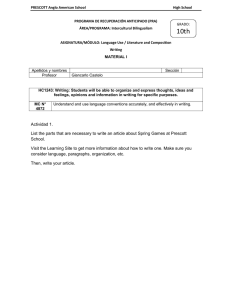
Total lift
•
Scheme of aerodynamics forces and moments for wing-fuselage and tail
8
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Total lift. Hypothesis
•
Interference of wing on horizontal tail:
– Deflection of flow direction (downstream the wing): 𝜀 decrease of
angle of attack of tail wrt angle of attack of wing due to induced velocity
from wing vortex
𝜕𝜀
𝜀 = 𝜀0 +
𝛼
𝜕𝛼 𝑤𝑏
• 𝜀0 depends on wing twist
•
𝜕𝜀
𝜕𝛼
depends on wing vortex intensity
– Aerodynamic efficiency of the tail: 𝜂𝑡 reduction of dynamic pressure of
flow on the tail 𝑞𝑡 wrt flow on the wing 𝑞 due to wing wake.
𝑞𝑡
𝜂𝑡 =
𝑞
9
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Activity 3.1.1
•
According to previous scheme of forces and moments, find
– lift,
– drag,
– lift coefficient
– drag coefficient
10
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Total lift
•
According to previous scheme of forces and moments, lift, drag, lift coefficient and drag
coefficient are:
𝐿 = 𝐿𝑤𝑏 + 𝐿𝑡 cos 𝜀 − 𝐷𝑡 sin 𝜀
𝐷 = 𝐷𝑤𝑏 + 𝐷𝑡 cos 𝜀 + 𝐿𝑡 sin 𝜀
𝐿
𝑆𝑡
𝑆𝑡
𝐶𝐿 =
= 𝐶𝐿𝑤𝑏 + 𝐶𝐿𝑡 𝜂𝑡 cos 𝜀 − 𝐶𝐷𝑡 𝜂𝑡 sin 𝜀
𝑞𝑆
𝑆
𝑆
𝐷
𝑆𝑡
𝑆𝑡
𝐶𝐷 =
= 𝐶𝐷𝑤𝑏 + 𝐶𝐷𝑡 𝜂𝑡 cos 𝜀 + 𝐶𝐿𝑡 𝜂𝑡 sin 𝜀
𝑞𝑆
𝑆
𝑆
•
•
𝑆 is the wing area and 𝑆𝑡 is the horizontal tail area
If deflection of flow direction is small 𝜺 ≪ 𝟏, and tail drag coefficient is much
smaller than tail lift coefficient 𝑪𝑫𝒕 ≪ 𝑪𝑳𝒕:
𝐶𝐿 =
•
•
𝐿
𝑞𝑆
= 𝐶𝐿𝑤𝑏 + 𝐶𝐿𝑡 𝜂𝑡
𝑆𝑡
cos 𝜀
𝑆
− 𝐶𝐷𝑡 𝜂𝑡
𝑆𝑡
sin 𝜀
𝑆
𝐶𝐿 = 𝐶𝐿𝑤𝑏 + 𝐶𝐿𝑡 𝜂𝑡
𝑆𝑡
𝑆
(1)
A linear model for wing and tail lift coefficients is:
𝐶𝐿𝑤𝑏 = 𝑎𝑤𝑏 𝛼𝑤𝑏
𝐶𝐿𝑡 = 𝑎𝑡 𝛼𝑡
𝛼𝑡 = 𝛼𝑤𝑏 + 𝑖𝑡 − 𝑖𝑤𝑏 − 𝜀 + 𝜏𝑒 𝛿𝑒
𝜏𝑒 is the efficiency of the elevator, and 𝛿𝑒 is the deflection of the elevator
11
3.1. Longitudinal static stability and control
Total lift
Área de Ingeniería Aeroespacial
•
If the linear model is used in equation (1)
𝜕𝜀
𝑆𝑡
𝐶𝐿 = 𝑎𝑤𝑏 𝛼𝑤𝑏 + 𝑎𝑡 𝛼𝑤𝑏 + 𝑖𝑡 − 𝑖𝑤𝑏 − 𝜀0 −
𝛼𝑤𝑏 + 𝜏𝑒 𝛿𝑒 𝜂𝑡 = 𝐶𝐿0 + 𝐶𝐿𝛼 𝛼𝑤𝑏 + 𝐶𝐿𝛿𝑒 𝛿𝑒
𝜕𝛼
𝑆
• So that:
𝑆𝑡
𝐶𝐿0 = 𝑎𝑡 𝑖𝑡 − 𝑖𝑤𝑏 − 𝜀0 𝜂𝑡
𝑆
𝑆𝑡
𝜕𝜀
𝐶𝐿𝛼 = 𝑎𝑤𝑏 + 𝑎𝑡 𝜂𝑡
1−
𝑆
𝜕𝛼
𝑆𝑡
𝐶𝐿𝛿𝑒 = 𝑎𝑡 𝜂𝑡 𝜏𝑒
𝑆
12
3.1. Longitudinal static stability and control
Total lift
Área de Ingeniería Aeroespacial
Sign convection for control surface deflections, and moments:
According to sign convention lift coefficients
are:
𝛼𝑤𝑏 ↑ → 𝐶𝐿 ↑ → 𝐶𝐿𝛼 > 0
𝛿𝑒 ↑ → 𝐶𝐿 ↑ → 𝐶𝐿𝛿𝑒 > 0
Deflection of elevator affects on lift
(simplification of performance studies not
valid here)
13
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Activity 3.1.2.
a) Calculate the angle 𝛼𝑤𝑏 for the zero lift line of the complete aircraft.
b) If the angle of attack is referenced to this line 𝛼𝑍𝐿𝐿 = 𝛼𝑤𝑏 − 𝛼𝑤𝑏,𝐶𝐿 =0, obtain the
total lift coefficient as a function of 𝛼𝑍𝐿𝐿 .
14
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Total pitch moment
If all forces are projected on perpendicular and parallel directions to fuselage reference line:
𝑁𝑤𝑏 = 𝐿𝑤𝑏 cos 𝛼𝑤𝑏 − 𝑖𝑤𝑏 + 𝐷𝑤𝑏 sin 𝛼𝑤𝑏 − 𝑖𝑤𝑏
𝐶𝑤𝑏 = −𝐿𝑤𝑏 𝑠𝑖𝑛 𝛼𝑤𝑏 − 𝑖𝑤𝑏 + 𝐷𝑤𝑏 𝑐𝑜𝑠 𝛼𝑤𝑏 − 𝑖𝑤𝑏
𝑁𝑡 = 𝐿𝑡 cos 𝛼𝑡 − 𝑖𝑡 + 𝐷𝑡 sin 𝛼𝑡 − 𝑖𝑡
𝐶𝑡 = −𝐿𝑡 𝑠𝑖𝑛 𝛼𝑡 − 𝑖𝑡 + 𝐷𝑡 𝑐𝑜𝑠 𝛼𝑡 − 𝑖𝑡
The perpendicular and parallel force coefficients for wing-body and tail are:
𝑁𝑤𝑏
𝐶𝑁𝑤𝑏 =
= 𝐶𝐿𝑤𝑏 cos 𝛼𝑤𝑏 − 𝑖𝑤𝑏 + 𝐶𝐷𝑤𝑏 sin 𝛼𝑤𝑏 − 𝑖𝑤𝑏
𝑞𝑆
𝐶𝑤𝑏
𝐶𝐶𝑤𝑏 =
= −𝐶𝐿𝑤𝑏 𝑠𝑖𝑛 𝛼𝑤𝑏 − 𝑖𝑤𝑏 + 𝐶𝐷𝑤𝑏 𝑐𝑜𝑠 𝛼𝑤𝑏 − 𝑖𝑤𝑏
𝑞𝑆
𝑁𝑡
𝐶𝑁𝑡 =
= 𝐶𝐿𝑡 cos 𝛼𝑡 − 𝑖𝑡 + 𝐶𝐷𝑡 sin 𝛼𝑡 − 𝑖𝑡
𝑞𝑡 𝑆𝑡
𝐶𝑡
𝐶𝐶𝑡 =
= −𝐶𝐿𝑡 𝑠𝑖𝑛 𝛼𝑡 − 𝑖𝑡 + 𝐶𝐷𝑡 𝑐𝑜𝑠 𝛼𝑡 − 𝑖𝑡
𝑞𝑡 𝑆𝑡
By taking moments about the center of gravity of aircraft:
𝑀𝐴 = 𝑁𝑤𝑏 𝑥𝑎 + 𝐶𝑤𝑏 𝑧𝑎 + 𝑀𝑎𝑐,𝑤𝑏 − 𝑁𝑡 𝑙𝑡 + 𝐶𝑡 𝑧𝑡 + 𝑀𝑎𝑐,𝑡
Total aerodynamic moment coefficient is:
𝑀𝐴
𝑆𝑡 𝑙𝑡
𝑆𝑡 𝑧𝑡
𝑆𝑡 𝑐𝑡
𝐶𝑚𝐴 =
= 𝐶𝑁𝑤𝑏 𝑥ҧ𝑎 + 𝐶𝐶𝑤𝑏 𝑧𝑎ҧ + 𝐶𝑀𝑎𝑐,𝑤𝑏 − 𝐶𝑁𝑡
𝜂𝑡 + 𝐶𝐶𝑡
𝜂𝑡 + 𝐶𝑀𝑎𝑐,𝑡
𝜂
𝑞𝑆𝑐
𝑆𝑐
𝑆𝑐
𝑆𝑐 𝑡
15
3.1. Longitudinal static stability and control
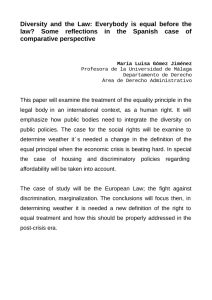
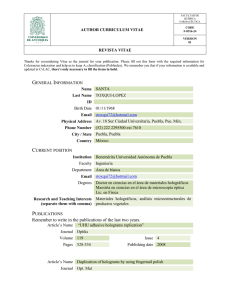
Total pitch moment
Área de Ingeniería Aeroespacial
Draw all geometric parameters that affects the total moment coefficient:
16
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Total pitch moment
Total aerodynamic moment coefficient is:
𝑀𝐴
𝑆𝑡 𝑙𝑡
𝑆𝑡 𝑧𝑡
𝑆𝑡 𝑐𝑡
𝐶𝑚𝐴 =
= 𝐶𝑁𝑤𝑏 𝑥ҧ𝑎 + 𝐶𝐶𝑤𝑏 𝑧𝑎ҧ + 𝐶𝑀𝑎𝑐,𝑤𝑏 − 𝐶𝑁𝑡
𝜂𝑡 + 𝐶𝐶𝑡
𝜂𝑡 + 𝐶𝑀𝑎𝑐,𝑡
𝜂
𝑞𝑆𝑐
𝑆𝑐
𝑆𝑐
𝑆𝑐 𝑡
•
𝑆𝑙
Where 𝑉ത𝑡 = 𝑡 𝑡 is the volumen coefficient of horizontal tail
•
If angles are small, 𝐶𝐷𝑤𝑏 ≪ 𝐶𝐿𝑤𝑏 , 𝐶𝐷𝑡 ≪ 𝐶𝐿𝑡 , and symetrical or quasi-symetrical tail
airfoil, the total moment coefficient is:
𝑆𝑐
𝐶𝑚𝐴 = 𝐶𝐿𝑤𝑏 𝑥ҧ𝑎 + 𝐶𝑀𝑎𝑐,𝑤𝑏 − 𝐶𝐿𝑡 𝑉ത𝑡 𝜂𝑡 = 𝐶𝐿𝑤𝑏 (𝑥ҧ𝑐𝑔 − 𝑥ҧ𝑎𝑐,𝑤𝑏 ) + 𝐶𝑀𝑎𝑐,𝑤𝑏 − 𝐶𝐿𝑡 𝑉ത𝑡 𝜂𝑡
•
If values of 𝐶𝐿𝑤𝑏 and 𝐶𝐿𝑡 are included:
𝐶𝑚𝐴 = 𝐶𝑚0 + 𝐶𝑚𝛼 𝛼𝑤𝑏 + 𝐶𝑚𝛿𝑒 𝛿𝑒
Where
𝐶𝑚0 = 𝐶𝑀𝑎𝑐,𝑤𝑏 − 𝑎𝑡 𝜂𝑡 𝑉ത𝑡 𝑖𝑡 − 𝑖𝑤𝑏 − 𝜀0
𝐶𝑚𝛼 = 𝑎𝑤𝑏 𝑥ҧ𝑐𝑔 − 𝑥ҧ𝑎𝑐,𝑤𝑏 − 𝑎𝑡 𝜂𝑡 𝑉ത𝑡 1 −
𝜕𝜀
𝜕𝛼
𝐶𝑚𝛿𝑒 = −𝑎𝑡 𝜂𝑡 𝑉ത𝑡 𝜏𝑒
17
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Total pitch moment. Analysis of moment coefficients
𝑪𝒎𝜶 : Index of longitudinal static stability with fixed controls. For static stability:
𝛼𝑤𝑏 ↑ → 𝐶𝑚𝐴 ↓ → 𝐶𝑚𝛼 < 0
𝑪𝒎𝜹𝒆 : Longitudinal control power:
𝛿𝑒 ↑ → 𝐶𝑚𝐴 ↓ → 𝐶𝑚𝛿𝑒 < 0
Note: According to sign convention, the moment coefficients associated to the other two
control surface deflections are:
𝐿𝐴
𝛿𝑎 ↑ → 𝐶𝑙𝐴 =
↑ → 𝐶𝑙𝛿𝑎 > 0
𝑞𝑆𝑐
𝑁𝐴
𝛿𝑟 ↑ → 𝐶𝑛𝐴 =
↑ → 𝐶𝑛𝛿𝑟 > 0
𝑞𝑆𝑐
18
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Index of longitudinal static stability with fixed controls
•
•
•
•
For a static stable aircraft to return to a configuration of equilibrium after a
perturbation, it has to produce “automatically” the forces and moments that
oppose the perturbation forces and moments.
The main perturbation to analyze in case of longitudinal static stability is the
change of the angle of attack. 𝛼𝑤𝑏 ↑ → 𝐶𝑚𝐴 ↓
Criterion for longitudinal static stability against perturbation of angle of attack,
with fixed controls (constant 𝛿𝑒 ) and constant load factor n:
< 0 𝑠𝑡𝑎𝑏𝑙𝑒
𝜕𝐶𝑚
𝜕𝐶𝑚𝐴
=
= 𝐶𝑚𝛼 = ቐ = 0 𝑛𝑒𝑢𝑡𝑟𝑎𝑙
𝜕𝛼𝑤𝑏 𝛿 ,𝑛
𝜕𝛼𝑤𝑏 𝛿 ,𝑛
> 0 𝑢𝑛𝑠𝑡𝑎𝑏𝑙𝑒
𝑒
𝑒
Modifying the center of gravity of the aircraft changes stability:
𝜕𝜀
𝐶𝑚𝛼 = 𝑎𝑤𝑏 𝑥ҧ𝑐𝑔 − 𝑥ҧ 𝑎𝑐,𝑤𝑏 − 𝑎𝑡 𝜂𝑡 𝑉ത𝑡 1 −
𝜕𝛼
19
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Index of longitudinal static stability with fixed controls
•
Neutral point with fixed controls: 𝑁0 = 𝑥ҧ𝑐𝑔
, so that
𝐶𝑚𝛼 =0
𝑎𝑡 𝜂𝑡 𝑉ത𝑡
𝜕𝜀
𝑁0 = 𝑥ҧ𝑎𝑐,𝑤𝑏 +
1−
→ 𝑪𝒎𝜶 = 𝒂𝒘𝒃 ഥ
𝒙𝒄𝒈 − 𝑵𝟎
𝑎𝑤𝑏
𝜕𝛼
•
Static margin with fixed control: 𝐻0 = 𝑁0 − 𝑥ҧ𝑐𝑔
•
Neutral point is a rear limit for position of center of gravity
•
…to be continued at last slight…
20
3.1. Longitudinal static stability and control
Index of longitudinal static stability with fixed controls
Área de Ingeniería Aeroespacial
•
Pitching moment coefficient about the center of gravity :
21
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Methods for longitudinal control
•
Controllability: respond of the aircraft after pilot actuation from a initial to final steady
states, or during unsteady manourvers.
– Static controllability:
• focused on relationships between
– steady flight conditions
– deflections
– level forces from pilots to mantain steady conditions
– Longitudinal static controllability:
• focused on relationships between
– the values of the angle of attack or velocity in steady flight conditions
– deflection of elevator
– level force from pilot on longitudinal control
22
3.1. Longitudinal static stability and control
Methods for longitudinal control
Área de Ingeniería Aeroespacial
•
For equilibrated steady and straight fligth at given angle of attack:
−𝐶𝑚0 − 𝐶𝑚𝛿𝑒 𝛿𝑒
𝐶𝑚 = 𝐶𝑚𝐴 = 𝐶𝑚0 + 𝐶𝑚𝛼 𝛼𝑤𝑏,𝑒 + 𝐶𝑚𝛿𝑒 𝛿𝑒 = 0 → 𝛼𝑤𝑏,𝑒 =
𝐶𝑚𝛼
where
𝐶𝑚0 = 𝐶𝑀𝑎𝑐,𝑤𝑏 − 𝑎𝑡 𝜂𝑡 𝑉ത𝑡 𝑖𝑡 − 𝑖𝑤𝑏 − 𝜀0
𝜕𝜀
𝐶𝑚𝛼 = 𝑎𝑤𝑏 𝑥ҧ𝑐𝑔 − 𝑥ҧ𝑎𝑐,𝑤𝑏 − 𝑎𝑡 𝜂𝑡 𝑉ത𝑡 1 −
𝜕𝛼
𝐶𝑚𝛿𝑒 = −𝑎𝑡 𝜂𝑡 𝑉ത𝑡 𝜏𝑒
•
Methods to change the angle of attack for equilibrium 𝛼𝑤𝑏,𝑒 , so that flight
conditions can be changed:
–
–
–
•
Change of 𝐶𝑚0 : deflection of flaps change of wing-body pitching moment
coefficient 𝐶𝑀𝑎𝑐,𝑤𝑏
Change of position of center of gravity: modify the angle of attack but also the index of
static stability 𝐶𝑚𝛼 .
Deflection of elevator: modify 𝐶𝑚𝛿𝑒 𝛿𝑒
Aircraft use third method except hang-glider that changes the second one
23
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Deflection of elevator for equilibrium (trim)
•
From longitudinal equilibrium, the deflection of elevator to flight at different
equilibrium angles of attack:
𝐶𝑚0
𝐶𝑚𝛼
𝐶𝑚𝛼
𝛿𝑒 = −
−
𝛼𝑤𝑏,𝑒 = 𝛿𝑒0 −
𝛼
𝐶𝑚𝛿𝑒 𝐶𝑚𝛿𝑒
𝐶𝑚𝛿𝑒 𝑤𝑏,𝑒
•
Relationship between index of static stability and 𝑑𝛿𝑒 Τ𝑑𝛼𝑤𝑏,𝑒 :
𝑑𝛿𝑒
𝐶𝑚𝛼
𝑑𝛿𝑒
=−
→ 𝑠𝑖𝑔𝑛
= 𝑠𝑖𝑔𝑛 𝐶𝑚𝛼
𝑑𝛼𝑤𝑏,𝑒
𝐶𝑚𝛿𝑒
𝑑𝛼𝑤𝑏,𝑒
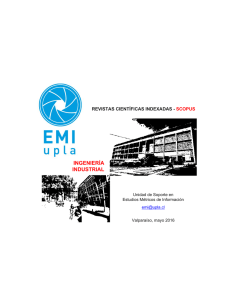
•
Elevator angle vs angle of attack for trim
•
Generally, at low speeds the elevator has negative deflection for trim and at higher
speeds the deflection becomes positive
24
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Deflection of elevator for equilibrium (trim)
•
If elevator angle for trim is used in the lift coefficient, lift
coefficient for trim is:
𝐶𝐿𝑒 = 𝐶𝐿0 + 𝐶𝐿𝛼 𝛼𝑤𝑏,𝑒 + 𝐶𝐿𝛿𝑒 𝛿𝑒
𝐶𝑚0
𝐶𝑚𝛼
= 𝐶𝐿0 + 𝐶𝐿𝛼 𝛼𝑤𝑏,𝑒 + 𝐶𝐿𝛿𝑒 −
−
𝛼
𝐶𝑚𝛿𝑒 𝐶𝑚𝛿𝑒 𝑤𝑏,𝑒
𝐶𝑚0
𝐶𝑚𝛼
= 𝐶𝐿0 −
𝐶𝐿𝛿𝑒 + 𝐶𝐿𝛼 −
𝐶
𝛼
𝐶𝑚𝛿𝑒
𝐶𝑚𝛿𝑒 𝐿𝛿𝑒 𝑤𝑏,𝑒
•
Slope of the lift coefficient for trim 𝑑𝐶𝐿𝑒 Τ𝑑𝛼𝑤𝑏,𝑒 :
𝑑𝐶𝐿𝑒
𝐶𝑚𝛼
= 𝐶𝐿𝛼 −
𝐶
𝑑𝛼𝑤𝑏,𝑒
𝐶𝑚𝛿𝑒 𝐿𝛿𝑒
→ 𝐶𝐿𝛿𝑒 > 0 , 𝐶𝑚𝛼 < 0 𝑖𝑓 𝑠𝑡𝑎𝑏𝑙𝑒, 𝐶𝑚𝛿𝑒 < 0 →
𝑑𝐶𝐿𝑒
< 𝐶𝐿𝛼
𝑑𝛼𝑤𝑏,𝑒
Slope of total lift coefficient for trim is smaller than slope of
wing-body lift coefficient
25
3.1. Longitudinal static stability and control
Área de Ingeniería Aeroespacial
Index of longitudinal static stability with fixed controls (II)
•
•
•
…continuation of slight 4…
For stable flight, there is a front limit for position of center of
gravity due to the need of compensate up to the stall angle of
attack for trim: 𝛼𝑤𝑏,𝑒,𝑚𝑎𝑥
When the stall angle occurs, the deflection of elevator is
minimum (negative and upwards): 𝛿𝑒,𝑚𝑖𝑛
𝐶𝑚𝛼
𝐶𝑚𝛼
𝛿𝑒 = 𝛿𝑒0 −
𝛼𝑤𝑏,𝑒 → 𝛿𝑒,𝑚𝑖𝑛 = 𝛿𝑒0 −
𝛼
𝐶𝑚𝛿𝑒
𝐶𝑚𝛿𝑒 𝑤𝑏,𝑒,𝑚𝑎𝑥
𝛼𝑤𝑏,𝑒,𝑚𝑎𝑥
To be reminded that 𝐶𝑚𝛿𝑒 < 0 and 𝐶𝑚𝛼 < 0
•
At this configuration:
𝐶𝑚𝛼 = 𝑎𝑤𝑏 𝑥ҧ𝑐𝑔,𝑙𝑖𝑚,𝑓𝑟𝑜𝑛𝑡 − 𝑁0
𝐶𝑚𝛿𝑒 𝛿𝑒,𝑚𝑖𝑛 − 𝛿𝑒0
𝐶𝑚𝛿𝑒 𝛿𝑒0 − 𝛿𝑒,𝑚𝑖𝑛
𝐶𝑚𝛼 = −
=
𝛼𝑤𝑏,𝑒,𝑚𝑎𝑥
𝛼𝑤𝑏,𝑒,𝑚𝑎𝑥
𝐶𝑚𝛿𝑒 𝛿𝑒0 − 𝛿𝑒,𝑚𝑖𝑛
ഥ
𝒙𝒄𝒈,𝒍𝒊𝒎,𝒇𝒓𝒐𝒏𝒕 = 𝑁0 +
𝑎𝑤𝑏 𝛼𝑤𝑏,𝑒,𝑚𝑎𝑥
26
 0
0