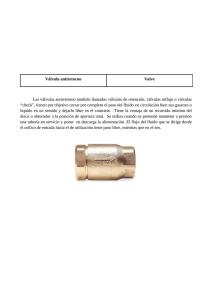
MANTENIMIENTO INDUSTRIAL MANTENIMIENTO INDUSTRIAL – III (Recopilación) 2009-10 ANTONIO ROS MORENO 1 MANTENIMIENTO INDUSTRIAL MANTENIMIENTO "Cuando todo va bien, nadie recuerda que existe" "Cuando algo va mal, dicen que no existe" "Cuando es para gastar, se dice que no es necesario" "Pero cuando realmente no existe, todos concuerdan en que debería existir" A.SUTE 2 MANTENIMIENTO INDUSTRIAL MANTENIMIENTO INDUSTRIAL (Recopilación) PARTE I.Introducción. Consideraciones Fundamentales. Gestión del Mantenimiento. PARTE II.Técnicas Específicas de Mantenimiento. El Futuro del Mantenimiento. PARTE III.Ejecución del Mantenimiento. Ejemplo de un Plan de Mantenimiento. 3 MANTENIMIENTO INDUSTRIAL INDICE - III: 6.- EJECUCIÓN DEL MANTENIMIENTO 6.1.- Introducción 6.2.- Fichas de trabajo 6.2.1.- Orden de trabajo 6.2.2.- Solicitud de repuestos y materiales 6.2.3.- Reporte semanal de mantenimiento 6.2.4.- Historial del equipo 6.3.- Conocimiento de equipos 6.3.1.- Turbomáquinas: Clasificación 6.3.2.- Bombas 6.3.3.- Ventiladores 6.3.4.- Compresores 6.3.5.- Turbinas 6.3.6.- Válvulas 6.3.7.- Motores eléctricos 6.3.8.- Instrumentación y control 6.4.- Tareas de mantenimiento 6.4.1.- Introducción 6.4.2.- Rutinas de mantenimiento preventivo planificado (MPP) 6.4.3.- Tareas en las operaciones de automantenimiento 6.4.4.- Mantenimiento legal 6.4.5.- Ejemplo de actuaciones y frecuencias recomendadas 7.- EJEMPLO DE UN PLAN DE MANTENIMIENTO BIBLIOGRAFÍA. 4 MANTENIMIENTO INDUSTRIAL 6. EJECUCIÓN DEL MANTENIMIENTO 6.1. Introducción Las tareas de mantenimiento se aplican sobre las instalaciones fijas y móviles, sobre equipos y maquinarias, sobre edificios industriales, comerciales o de servicios específicos, sobre las mejoras introducidas al terreno y sobre cualquier otro tipo de bien productivo. Alcanza a máquinas, herramientas aparatos e instrumentos, a equipos de producción, a los edificios y todas sus instalaciones auxiliares como agua potable, desagües, agua para el proceso, agua para incendios, pozos de agua y sistemas de bombeo, agua caliente y vapor con sus correspondientes generadores como calderas, intercambiadores de calor, instalaciones eléctricas monofásica y de fuerza motriz, pararrayos, balizamiento, instalación de aire comprimido, de combustibles, sistemas de aire acondicionado y de telefonía, equipos, aparatos y muebles de oficina, jardinería y rodados. Para la ejecución de las actividades de mantenimiento se implementó toda una gama de documentación administrativa y técnica, lo cual incluye: • Manual de Sistema de Gestión • Procedimientos Administrativos • Procedimientos de Trabajo • Instructivos Técnicos • Registro Administrativos • Registros de Mantenimiento • Registro de Planificación Diaria • Registros de Análisis de Fallas Las empresas, como una entidad que busca el Mejoramiento continuo de los diferentes procesos, requiere un manual de mantenimiento preventivo y correctivo para los equipos que operan en él, ya que este tipo de mantenimiento optimiza el funcionamiento, protege y alarga la vida útil de dichos equipos (preventivo), de igual forma se debe corregir cualquier tipo de impase que se pueda presentar tales como 5 MANTENIMIENTO INDUSTRIAL cambio de válvulas, estado de los cables y estado de las conexiones en el circuito eléctrico, entre otras (Correctivo). Con el fin de llevar un control en los equipos es necesario realizar un registro de mantenimiento para cada mecanismo y tener en cuenta que el mantenimiento preventivo debe realizarse periódicamente. Para llevar a cabo el manual de mantenimiento preventivo se deben tener en cuenta las siguientes actividades: 1. Inventario. Es el inicio de las actividades para llevar a cabo el mantenimiento preventivo, en el inventario se encuentra la referencia y especificaciones de los equipos. 2. Realizar cronograma de mantenimiento. El cronograma se realiza dependiendo del tiempo de funcionamiento de los equipos, teniendo en cuenta que se debe realizar periódicamente. 3. Establecer prioridad del equipo. La priorización se realiza con el fin de determinar qué equipo necesita el mantenimiento preventivo inicialmente. 4. Coordinar el servicio de mantenimiento preventivo. Establecer las fechas de intervención para los diferentes equipos. 5. Establecer contratista. Buscar la empresa que por su experiencia pueda llevar a cabo el mantenimiento preventivo. 6. Solicitar la elaboración del contrato. La solicitud del contrato se realiza con la cotización previamente aprobada. 7. Realizar mantenimiento preventivo. Realizar las actividades preventivas relacionadas a cada equipo. 8. Validar el mantenimiento. El mantenimiento debe ser validado con la firma del usuario del mantenimiento preventivo. 9. Descargar reporte de mantenimiento. Diligenciar hoja de vida del equipo, describiendo las actividades realizadas, la fecha y el responsable del mantenimiento. 10. Archivar hoja de vida del equipo. El archivo se debe realizar para cada equipo. 6 MANTENIMIENTO INDUSTRIAL Al igual que el mantenimiento preventivo se deben tener en cuenta actividades para llevar a cabo el mantenimiento correctivo: 1. Inventario. Es el inicio de las actividades para llevar a cabo el mantenimiento correctivo, en el inventario se encuentra la referencia y especificaciones de los equipos. 2. Diagnosticar daño del equipo. Revisar el equipo y realizar un diagnóstico, evaluando anomalías en su funcionamiento. 3. Establecer prioridad del equipo. La priorización se realiza con el fin de determinar qué equipo necesita mantenimiento correctivo principalmente. 4. Establecer repuestos. En el caso que la reparación del equipo sea directa se procede con establecer los materiales y repuestos necesarios de acuerdo con la falla que se presente. 5. Establecer contratista. En caso de reparación no directa, buscar la empresa que por su experiencia pueda llevar a cabo el mantenimiento correctivo. 6. Coordinar el servicio de mantenimiento correctivo. Establecer las fechas de intervención para los diferentes equipos. 7. Elaboración orden del servicio. La solicitud de la orden de servicio se realiza con la cotización previamente aprobada. 8. Realizar mantenimiento correctivo. Realizar las actividades correctivas relacionadas a las fallas originadas en los equipos cambiando los repuestos deteriorados. 9. Cerrar orden de mantenimiento. El mantenimiento debe ser validado con la firma del usuario del mantenimiento correctivo. 10. Descargar reporte de mantenimiento. Diligenciar hoja de vida del equipo, describiendo las actividades realizadas, la fecha y el responsable del mantenimiento. 11. Archivar hoja de vida del equipo. El archivo se debe realizar para cada equipo. La mayor parte de lo expuesto corresponde a la gestión de mantenimiento (apartado 3), pero nos queda por desarrollar los medios documentales que intervienen directamente en la ejecución de dicho mantenimiento, así como el conocimiento de los equipos y su mantenimiento especifico. 7 MANTENIMIENTO INDUSTRIAL 6.2. Fichas de trabajo Para ejecutar el programa de mantenimiento se requiere elaborar unas fichas que servirán para controlar, solicitar, reportar, etcétera, las actividades que se van a ejecutar. Entre estas fichas, tenemos las siguientes: 1. orden de trabajo; 2. solicitud de repuestos y materiales; 3. reporte semanal de mantenimiento, e 4. historial de los equipos. 6.2.1. Orden de trabajo Depende del plan estratégico en el que se especifican los cambios, reparaciones, emergencias, etcétera, que serán atendidos por el equipo. Esta orden será solicitada por el jefe de turno y aprobada por el encargado de mantenimiento. Debe tenerse en cuenta que ningún trabajo podrá iniciarse sin la respectiva orden y sin que las condiciones requeridas para dicha labor hayan sido verificadas personalmente por el encargado. Para esto se debe tener en cuenta la siguiente jerarquía: Emergencia. Son aquellos trabajos que atañen a la seguridad de la planta, averías que significan grandes pérdidas de dinero o que pueden ocasionar grandes daños a otras unidades. Estos trabajos deben iniciarse de forma inmediata y ser ejecutados de forma continua hasta su completa finalización. Pueden tomar horas extra. Urgente. Son trabajos en los que debe intervenirse lo antes posible, en el plazo de 24 a 48 horas después de solicitada la orden. Este tipo de trabajos sigue el procedimiento normal de programación. No requiere sobretiempos, salvo que ello sea solicitado explícitamente por la dependencia correspondiente. Normal. Son trabajos rutinarios cuya iniciación es tres días después de solicitada la orden de trabajo, pero pueden iniciarse antes, siempre que exista la disponibilidad de recursos. Sigue un procedimiento normal de programación. Permanente. Son trabajos que pueden esperar un buen tiempo, sin dar lugar a convertirse en críticos. Su límite de iniciación es dos semanas después de haberse 8 MANTENIMIENTO INDUSTRIAL solicitado la orden de trabajo. Sigue la programación normal y puede ser atendido en forma cronológica de acuerdo con lo programado. En la figura 149, se muestra un ejemplo de una ficha “Orden de trabajo”, donde se debe anotar el código del equipo, la sección de trabajo, el número de actividad que se debe realizar, la prioridad (emergencia, urgente, etcétera), la fecha, la mano de obra, los materiales, etcétera. Figura 149.- Orden de Trabajo 9 MANTENIMIENTO INDUSTRIAL 6.2.2. Solicitud de repuestos y materiales Para proveer de materiales y repuestos al personal de mantenimiento, se elabora una ficha denominada “Solicitud de repuestos y materiales”, donde se solicita a almacén estos insumos. Esta ficha servirá para llevar un control adecuado de repuestos y materiales. Va acompañada de la orden de trabajo. En la figura 150 se muestra un ejemplo de ficha de “Solicitud de repuestos y materiales”, donde se debe anotar el número de solicitud, la fecha, el turno, el código del equipo, la sección y la descripción de los repuestos o materiales que se pide. Figura 150.- Solicitud de Repuestos y Materiales 10 MANTENIMIENTO INDUSTRIAL 6.2.3. Reporte semanal de mantenimiento Sirve para registrar los servicios efectuados durante la semana y llevar un mejor control de los trabajos de prevención y de los costos de los materiales empleados. En la figura 151 se muestra un ejemplo de la ficha “Reporte semanal de mantenimiento”, donde se debe anotar la fecha, el código del equipo, el número de orden, el trabajo que se realizó, los materiales y los costos. Figura 151.- Reporte Semanal de Mantenimiento 11 MANTENIMIENTO INDUSTRIAL 6.2.4. Historial del equipo Después de intervenir cada equipo, se registra en la ficha “Historial del equipo” la fecha, los servicios y reposiciones realizadas, los materiales usados, etcétera. Esta ficha también servirá para controlar la operación y calidad y modificar el programa de mantenimiento. La cantidad de estas fichas dependerá del número de equipos con que cuente la planta industrial. En la figura 152 se muestra un ejemplo de la ficha “Historial del equipo”. Figura 152.- Historial del Equipo 12 MANTENIMIENTO INDUSTRIAL 6.3. Conocimiento de equipos En esta parte se trata de dar una explicación sencilla, de todos los elementos y principios más importantes en que están basados las principales máquinas y/o equipos utilizados en la industria, ilustrándolos con dibujos, figuras y diagramas que faciliten su comprensión. La definición más exacta que podemos hacer de una máquina es aquella que la considera como un elemento transformador de energía, ya que una máquina, siempre absorbe energía de un tipo y la restituye como energía de otro tipo, o del mismo pero transformada. En el Cuadro nº 1 se representa una clasificación general de las máquinas, para poder establecer dentro de ellas la situación y características de las que vamos a estudiar. 13 MANTENIMIENTO INDUSTRIAL En consecuencia, y dado que el tema es sumamente amplio, el contenido del apartado se limita a suministrar una descripción breve de los principales equipos utilizados en la mayor parte de las industrias. Bombas Ventiladores Compresores Turbinas Válvulas Motores eléctricos Instrumentación y control 6.3.1. TURBOMÁQUINAS: Clasificación Las turbomáquinas se diferencian de otras máquinas térmicas en que son de funcionamiento continuo, no alternativo o periódico como el motor de explosión o la bomba de vapor a pistón. A semejanza de otras máquinas las turbomáquinas son esencialmente transformadoras de energía, y de movimiento rotativo. Sin embargo, se diferencian, por ejemplo, del motor eléctrico, en que la transformación de energía se realiza utilizando un fluido de trabajo. En las turbomáquinas el fluido de trabajo pude ser un líquido (comúnmente agua, aunque para el caso de las bombas de líquido la variedad de fluidos es muy grande) o un gas o vapor (comúnmente vapor de agua o aire, aunque nuevamente para los compresores la variedad de gases a comprimir puede ser muy grande). Las turbomáquinas cuyo fluido de trabajo es un líquido se denominan turbomáquinas HIDRAULICAS; no hay una denominación especial para las demás. Este fluido de trabajo se utiliza para convertir la energía según una cascada que puede enunciarse como sigue: · Energía térmica (calor) · Energía potencial (presión) · Energía cinética (velocidad) · Intercambio de cantidad de movimiento · Energía mecánica 14 MANTENIMIENTO INDUSTRIAL No todas las turbomáquinas comprenden la cascada completa de energía: algunas sólo incluyen algunos escalones. Por otra parte, la cascada no siempre se recorre en la dirección indicada, pudiendo tener lugar en la dirección opuesta. Las turbomáquinas que recorren la cascada en la dirección indicada se denominan MOTRICES, y las que la recorren en la dirección opuesta se denominan OPERADORAS. Las turbomáquinas motrices reciben las siguientes denominaciones: · Si trabajan con líquidos, turbinas hidráulicas · Si trabajan con gases, turbinas (de vapor, de gases de combustión, etc.) Las turbomáquinas operadoras se denominan: · Si trabajan con líquidos, bombas hidráulicas · Si trabajan con gases, compresores (altas presiones) o ventiladores o sopladores (bajas presiones) También se diferencian las turbomáquinas según la trayectoria que en general sigue el fluido: si el movimiento es fundamentalmente paralelo al eje de rotación se denominan turbomáquinas AXIALES. Si es principalmente normal al eje de rotación, turbomáquinas RADIALES (centrífugas o centrípetas según la dirección de movimiento), y si se trata de casos intermedios, turbomáquinas MIXTAS. Las turbomáquinas pueden recibir el fluido en toda su periferia (máquinas de admisión plena) o sólo en parte (máquinas de admisión parcial). 6.3.2. Bombas Todos los procesos industriales que sostienen nuestra civilización incluyen la transferencia de líquidos desde un nivel de presión o energía estática a otro y, como resultado de ello, las bombas se han convertido en una parte esencial de todos los procesos industriales; es decir, las bombas son una parte integral de todo el desarrollo moderno, tanto económico como social. Una bomba es un dispositivo empleado para elevar, transferir o comprimir líquidos y gases, en definitiva son máquinas que realizan un trabajo para mantener un líquido en movimiento. Consiguiendo así aumentar la presión o energía cinética del fluido. 15 MANTENIMIENTO INDUSTRIAL Se tiene constancia de la existencia de algún tipo de bomba sobre el 300 A.C., Arquímedes (matemático y físico griego) construyó una de diseño sencillo, aunque poco eficiente, con un tornillo que gira en una carcasa e impulsa el líquido. Hay una diversidad de mecanismos de bombeo (bombas), cuya capacidad, diseño y aplicación cubren un amplio rango que va desde pequeñas unidades utilizadas para dosificación de cantidades mínimas, hasta bombas centrifugas que son capaces de manejar grandes volúmenes para surtir de agua a las grandes concentraciones urbanas. Su variedad de diseños cubren desde diferentes principios de operación, hasta bombas especiales para manejo de sustancias tan diversas como el agua, metales fundidos, concreto, etc., gastos diferentes y materiales de construcción. Debido a la diversidad de bombas ya mencionadas, hay muchas formas de clasificar las bombas. Por rangos de volúmenes a manejar, por fluidos a mover, etc. Sin embargo, la clasificación más general es en función de la forma en que las bombas imprimen el movimiento al fluido, separándose en dos tipos principales: • Bombas volumétricas o de desplazamiento positivo, entre las que se encuentran por ejemplo las alternativas, rotativas y las neumáticas, pudiendo decir a modo de síntesis que son bombas de pistón, cuyo funcionamiento básico consiste en recorrer un cilindro con un vástago. • Bombas dinámicas o de energía cinética: fundamentalmente consisten en un rodete que gira acoplado a un motor. Entre ellas se sitúan las regenerativas, las especiales, las periféricas o de turbinas y una de las más importantes, las centrífugas. Las del primer grupo operan sobre el principio de desplazamiento positivo, es decir, que bombean una determinada cantidad de fluido (sin tener en cuenta las fugas independientemente de la altura de bombeo). El segundo tipo debe su nombre a un elemento rotativo, llamado rodete, que comunica velocidad al líquido y genera presión. La carcasa exterior, el eje y el motor completan la unidad de bombeo. En todos los tipos de bombas para líquidos deben emplearse medidas para evitar el fenómeno de la cavitación, que es la formación de un vacío que reduce el flujo y daña la estructura de la bomba. 16 MANTENIMIENTO INDUSTRIAL Clasificación de Bombas: La clasificación anterior, nos permite apreciar la gran diversidad de tipos que existen y si a ello agregamos materiales de construcción, tamaños diferentes para manejo de gastos y presiones sumamente variables y los diferentes líquidos a manejar, etc., entenderemos la importancia de este tipo de maquinaria. Dentro de ésta clasificación los tipos de bombas más comúnmente utilizadas son las llamadas Centrífugas, Alternativas (reciprocantes) y Rotatorias, y en ellas concentraremos éste estudio. 1) BOMBAS VOLUMÉTRICAS O DE DESPLAZAMIENTO POSITIVO En la bomba volumétrica el desplazamiento del líquido se realiza mediante un proceso, en el que se verifica el desalojo periódico del líquido contenido en unas cámaras de trabajo, mediante un dispositivo que las desplaza, que es un órgano de trabajo, (pistón, engranaje, etc.), con unos espacios que comunican, periódicamente, la cavidad de recepción del líquido o cámara de aspiración, con la cavidad de descarga o cámara de impulsión, pudiendo tener una o varias cámaras de trabajo. 17 MANTENIMIENTO INDUSTRIAL El funcionamiento consiste en el paso periódico de determinadas porciones de líquido, desde la cavidad de aspiración, a la de descarga de la bomba, con un aumento de presión; el paso del líquido por la bomba volumétrica, a diferencia del paso por los álabes de una bomba centrífuga, es siempre más o menos irregular, por lo que en general, el caudal se considerará como el valor medio del caudal trasegado. La cavidad de aspiración tiene que estar, siempre, herméticamente aislada de la de descarga o impulsión; a veces se puede admitir la existencia de pequeñas filtraciones de líquido a través de las holguras, deslizamiento, aunque en proporciones muy pequeñas frente al suministro de la bomba. En general, todas las bombas volumétricas son autoaspirantes, o autocebantes, por lo que si comienzan a funcionar con aire, sin líquido, pueden llegar a crear una rarificación tan grande capaz de succionar al líquido por la tubería de aspiración, con la condición de que la altura geométrica de aspiración no sobrepase un cierto valor, propiedad que se puede perder cuando la hermeticidad o el número de revoluciones son insuficientes. En las bombas de desplazamiento positivo existe una relación directa entre el movimiento de los elementos de bombeo y la cantidad de líquido movido. En el mercado puede encontrarse una amplia diversidad de bombas siendo los tipos básicos los que relatamos seguidamente, aunque existen muchas variaciones y modificaciones de estos tipos básicos. Alternativas: - De pistón - De émbolo - De diafragma Rotativas: - Engranajes - Tornillo - Paletas - Levas - Especiales Bombas neumáticas: - Son bombas de desplazamiento positivo en las que la energía de entrada es neumática, normalmente a partir de aire comprimido. En todas estas bombas, el líquido se descarga en una serie de pulsos, y no de forma continua, por lo que hay que tener cuidado para que no aparezcan condiciones de resonancia en los conductos de salida que podrían dañar o destruir la instalación. En las 18 MANTENIMIENTO INDUSTRIAL bombas alternativas se colocan con frecuencia cámaras de aire en el conducto de salida para reducir la magnitud de estas pulsaciones y hacer que el flujo sea más uniforme. Una de las más importantes en esta clasificación son las alternativas y las rotativas, de las cuales haremos una breve descripción: BOMBAS ALTERNATIVAS ó RECIPROCANTES Como su nombre lo indica, producen el bombeo de fluidos con base a un movimiento reciprocante de uno o varios pistones, siendo por ello también bombas de desplazamiento positivo. Las bombas alternativas están formadas por un pistón que oscila en un cilindro dotado de válvulas para regular el flujo de líquido hacia el cilindro y desde él. Estas bombas pueden ser de acción simple o de acción doble: En una bomba de acción simple el bombeo sólo se produce en un lado del pistón, como en una bomba aspirante común, en la que el pistón se mueve arriba y abajo manualmente. El líquido se impulsa únicamente durante media vuelta de la manivela, por cuanto, en la segunda media vuelta, el líquido se aspira, existiendo en consecuencia una gran irregularidad en el suministro. En una bomba de doble acción, el bombeo se produce en ambos lados del pistón, como por ejemplo en las bombas eléctricas o de vapor para alimentación de calderas, empleadas para enviar agua a alta presión a una caldera de vapor de agua. Estas bombas pueden tener una o varias etapas. Las bombas alternativas de etapas múltiples tienen varios cilindros colocados en serie. Para la bomba de doble efecto, el suministro durante una vuelta se reduce por dos veces a cero, y también, por dos veces, alcanza el valor máximo, siendo su irregularidad menor que para el caso de simple efecto, pero aún así es demasiado grande, por cuanto la presión del líquido junto al émbolo varía fuertemente debido a la corriente irregular en las tuberías. Esquema de una bomba de Pistón Figura 153.- Bomba Alternativa de Pistón 19 MANTENIMIENTO INDUSTRIAL Durante el movimiento acelerado del émbolo, y en consecuencia, del líquido en la tubería de aspiración, tiene lugar una caída de presión junto al émbolo que puede provocar cavitación, e incluso, separación del líquido de la superficie del émbolo, consumiéndose una potencia suplementaria en el aumento periódico de las pérdidas de carga por rozamiento del líquido contenido en las tuberías de aspiración e impulsión. Las bombas de émbolo pueden crear presiones de miles de atmósferas, siendo de entre todas las bombas existentes, las que poseen mayor impulsión; normalmente funcionan con números de revoluciones bajos, del orden de 300 a 500 rpm, ya que si las revoluciones son más altas, se puede llegar a alterar el funcionamiento normal de las válvulas de aspiración e impulsión; debido a esta marcha lenta, sus dimensiones resultan bastante mayores que las de una bomba centrífuga que funcione en las mismas condiciones de caudal y altura manométrica. Aunque las bombas de émbolo alternativo han sido separadas en la mayoría de los campos de aplicación por las bombas rotodinámicas, mucho más adaptables, todavía se emplean ventajosamente en muchas operaciones industriales especiales. Ocasionalmente, las bombas alternativas están provistas de un diafragma flexible recíprocamente en vez de un émbolo o pistón, con lo cual se elimina la fricción y las fugas en el punto donde el émbolo atraviesa la caja de empaque. Un ejemplo de esta bomba queda ilustrado en la figura 154, en la cual el movimiento del diafragma es obtenido mediante una cama excéntrica y una palanca; las válvulas de succión y de descarga trabajan en forma ordinaria. Tales bombas son muy comunes en la actualidad para levantar combustible de los tanques posteriores de los automóviles a los carburadores de los mismos. Esquema de una bomba de Diafragma Figura 154.- Bomba Alternativa de Diafragma 20 MANTENIMIENTO INDUSTRIAL BOMBAS DE ÉMBOLO ROTATIVO Estas bombas no tienen válvulas ni partes reciprocantes, el movimiento del líquido es efectuado por la acción combinada de dos elementos giratorios semejantes a las ruedas dentadas. Es una bomba muy simple, fiable, económica y poco sensible a la suciedad. Mientras los engranajes giran, y los dientes en el lado de succión se acercan al punto de engrane de la ruedas, se crea un vacío y el fluido fluye hacia el espacio entre los flancos de los dientes y la pared de la carcasa. El fluido en las cámaras es transportado hacia el lado de presión de la bomba. Allí los dientes engranan y el fluido es forzado a salir desde el espacio entre los dientes hacia el puerto de descarga de la bomba. El engrane entre dientes evita que el fluido fluya del lado de presión al lado de succión. Así el fluido es llevado del lado de succión al lado de presión a lo largo de la pared del alojamiento de los engranajes. Para evitar la cavitación, la presión en el lado de succión de la bomba no deberá exceder los 0.1 – 0.2 bar. por debajo de la presión atmosférica. Esquema de Bomba Rotatoria Figura 155.- Bomba de Émbolo Rotativo Las bombas rotativas pertenecen a una clase de bombas volumétricas que en la actualidad tienen una amplia gama de aplicaciones en la construcción de maquinaria; las diversas bombas que componen este grupo se diferencian sustancialmente en su diseño y construcción, pero tienen muchas características comunes, como la traslación de las cámaras de trabajo desde la cavidad de admisión de la bomba hasta la de impulsión, o el movimiento absoluto giratorio, o el más complicado de avance y giro de los elementos móviles. 21 MANTENIMIENTO INDUSTRIAL El caudal es uniforme y no hay válvulas. Este tipo de bombas es eminentemente adecuado para pequeños caudales (menores de 1 pie3/s y el líquido viscoso). Las variables posibles son muy numerosas. El proceso de trabajo de la bomba rotativa consta fundamentalmente de tres etapas: a) Llenado de las cámaras de trabajo por el líquido b) Cierre de las cámaras de trabajo, aislándose las cavidades de aspiración y de impulsión, y trasladando el líquido de una a otra. c) Desalojo del líquido de las cámaras de trabajo Las bombas rotativas se pueden clasificar atendiendo a diversas características peculiares de las mismas: a) Según el tipo de movimiento absoluto de los órganos móviles, se dividen en rotatorias y de corredera. En las rotatorias, los órganos móviles realizan únicamente un movimiento giratorio respecto a sus ejes, teniendo como apoyos los cojinetes fijos. En las de corredera, los órganos móviles giran respecto al eje del estator, al tiempo que realizan un movimiento rectilíneo de vaivén respecto al rotor; según el tipo de cierre de las cámaras de trabajo y la forma de los elementos móviles, las bombas de corredera se dividen en bombas de aletas, Fig. 156, y en rotativas de émbolo, Fig. 157. 22 MANTENIMIENTO INDUSTRIAL b) Según la forma con que se trasladan las cámaras de trabajo, es decir, según el movimiento del líquido desalojado en la bomba, pueden ser planas y helicoidales. En las bombas rotatorias planas, la traslación de las cámaras de trabajo, (y en consecuencia la del propio líquido), se realiza en un plano normal al eje de rotación del rotor, siendo la más interesante la de engranajes, Fig. 158. 23 MANTENIMIENTO INDUSTRIAL En las bombas rotativas helicoidales, la traslación de las cámaras de trabajo se realiza a lo largo del eje de rotación del rotor, siendo la más interesante la de tornillos, Fig. 159. c) Según la variabilidad del volumen trasegado en cada revolución, o desplazamiento, pueden ser de desplazamiento fijo y de desplazamiento variable. En las de desplazamiento variable, lo que se hace es modificar la excentricidad del rotor. En muchas aplicaciones hay que variar el caudal, lo cual se puede lograr variando n (número de revoluciones por minuto del cigüeñal), que no es recomendable, o variando el desplazamiento, como ya se ha indicado, que es lo más frecuente. 2) BOMBAS DE ENERGÍA CINÉTICA En este tipo de bombas la energía es comunicada al fluido por un elemento rotativo que imprime al líquido el mismo movimiento de rotación, transformándose luego, parte en energía y parte en presión. El caudal a una determinada velocidad de rotación depende de la resistencia al movimiento en la línea de descarga. La bomba rotodinámica es capaz de satisfacer la mayoría de las necesidades de la ingeniería y su uso está muy extendido. Su campo de utilización abarca desde abastecimientos públicos de agua, drenajes y regadíos, hasta transporte de hormigón o pulpas. 24 MANTENIMIENTO INDUSTRIAL Los diversos tipos se pueden agrupar en: Periféricas o de turbinas. Centrífugas: - Radiales - Diagonales - Axiales Especiales. Las centrífugas son el tipo más corriente de bombas rotodinámicas, y se denomina así porque la cota de presión que crean es ampliamente atribuible a la acción centrífuga. BOMBAS PERIFÉRICAS Son también conocidas como bombas tipo turbina, de vértice y regenerativas, en este tipo se producen remolinos en el líquido por medio de los álabes a velocidades muy altas, dentro del canal anular donde gira el impulsor. El líquido va recibiendo impulsos de energía No se debe confundir a las bombas tipo difusor de pozo profundo, llamadas frecuentemente bombas turbinas aunque no se asemeja en nada a la bomba periférica. La verdadera bomba turbina es la usada en centrales hidroeléctricas tipo embalse llamadas también de Acumulación y Bombeo, donde la bomba consume potencia; en determinado momento, puede actuar también como turbina para entregar potencia. El elemento básico de la turbina es la rueda o rotor, que cuenta con palas, hélices, cuchillas o cubos colocados alrededor de su circunferencia, de tal forma que el fluido en movimiento produce una fuerza tangencial que impulsa la rueda y la hace girar. Esta energía mecánica se transfiere a través de un eje para proporcionar el movimiento de una máquina, un compresor, un generador eléctrico o una hélice. Se han diseñado turbinas que actúan como bombas cuando funcionan a la inversa, invirtiendo el generador eléctrico para que funcione como un motor. Dado que no es posible almacenar la energía eléctrica de forma económica, este tipo de bombas turbina se utiliza para bombear agua hacia los embalses, aprovechando la energía eléctrica generada por las centrales nucleares y térmicas durante las horas de poco consumo. El agua embalsada se emplea de nuevo para generar energía eléctrica durante las horas de consumo elevado. En los últimos años se han desarrollado turbinas para caídas de hasta 600 m y con capacidades de más de 400 MW. 25 MANTENIMIENTO INDUSTRIAL Su diseño conjuga el principio de centrifugación con el principio de desplazamiento positivo. La turbina, impulsora es un disco sólido con un gran número de álabes rectos, dispuestos en forma radial. Dicha turbina está contenida en una cámara que tiene un canal circular situado en ambos lados de la misma. El fluido ingresante por la tobera de aspiración es conducido por los álabes durante casi una vuelta completa hasta la tobera de salida, en su camino por efecto de la fuerza centrífuga el fluido es impulsado hacia la periferia del canal, produciéndose una recirculación entre álabe y canal, equivalente a sucesivas etapas de compresión de una bomba centrífuga. BOMBAS CENTRÍFUGAS Este tipo de bomba está compuesta por una cámara en forma de caracol que en su interior posee un disco central llamado rodete. Este a su vez posee pequeñas aletas llamadas alabes. Este mecanismo de impulsión permite que el líquido obtenga energía cinética y la transforme en energía de presión para así aumentar la velocidad de flujo. El líquido al chocar con las paredes de la cámara, disminuye su velocidad haciendo que se pierda energía. En este tipo de bombas, el fluido ingresa a ésta por el eje y sale siguiendo una trayectoria periférica por la tangente. Algunas de las características de estas bombas son las siguientes: Descarga de flujo continuo, sin pulsaciones. Puede bombear todo tipo de líquidos, sucios abrasivos, con sólidos, etc. Altura de succión máxima del orden de 4.5 metros de columna de agua. Rangos de presión de descarga hasta de 150 kg/cm2. Rangos de volúmenes a manejar hasta de 20,000 m3/hr. Las bombas centrífugas, debido a sus características, son las bombas que más se aplican en la industria. Las razones de estas preferencias son las siguientes: No tienen órganos articulados y los mecanismos de acoplamiento son muy sencillos. La impulsión eléctrica del motor que la mueve es bastante sencilla. Para una operación definida, el gasto es constante y no se requiere dispositivo regulador. Se adaptan con facilidad a muchas circunstancias. Aparte de las ventajas ya enumeradas, se unen las siguientes ventajas económicas: El precio de una bomba centrífuga es aproximadamente ¼ del precio de la bomba de émbolo equivalente. 26 MANTENIMIENTO INDUSTRIAL El espacio requerido es aproximadamente 1/8 del de la bomba de émbolo equivalente. El peso es muy pequeño y por lo tanto las cimentaciones también lo son. El mantenimiento de una bomba centrífuga sólo se reduce a renovar el aceite de las chumaceras, los empaques de la presa-estopa y el número de elementos a cambiar es muy pequeño. Uno de sus pocos inconvenientes es la necesidad de cebado previo al funcionamiento, ya que las bombas centrífugas, al contrario que las de desplazamiento positivo, no son autoaspirantes. Un físico francés fue el primero que ideó las características esenciales de este tipo de bomba, la cual ha ido evolucionando a través de numerosos patentes. Así como la turbina Francis evolucionó hacia la turbina a hélice, con la necesidad de generar más revoluciones, las bombas centrífugas evolucionaron a las bombas de hélice o de flujo axial, como inconveniencia de ir aumentando el diámetro del eje del rotor, para permitir el ingreso de mayores caudales. Así cuando se desea obtener mayores caudales se dispone de unos o más rotores sobre el mismo árbol motor. Figura 160.- Bomba Centrífuga La misión de las bombas centrífugas es mover un cierto volumen de líquido entre dos niveles, por tanto son máquinas hidráulicas que transforman un trabajo mecánico en otro de tipo hidráulico. 27 MANTENIMIENTO INDUSTRIAL Los elementos que forman una instalación de este tipo son: a) Una tubería de aspiración, que concluye prácticamente en la brida de aspiración. b) Un impulsor o rodete, formado por un conjunto de álabes que pueden adoptar diversas formas según la misión que vaya a desarrollar la bomba. Estos álabes giran dentro de una carcasa circular. El rodete es accionado por un motor, y va unido solidariamente al eje, siendo este la parte móvil de la bomba. El líquido penetra axialmente por la tubería de aspiración hasta la entrada del rodete, experimentando un cambio de dirección más o menos brusco, pasando a radial, en las bombas centrífugas, o permaneciendo axial en las axiales, acelerándose y absorbiendo un trabajo. Los álabes del rodete someten a las partículas de líquido a un movimiento de rotación muy rápido, siendo estas partículas proyectadas hacia el exterior por la fuerza centrífuga, creando así una altura dinámica, de tal forma que las partículas abandonan el rodete hacia la voluta a gran velocidad, aumentando también su presión en el impulsor según la distancia al eje. La elevación del líquido se produce por la reacción entre éste y el rodete sometido al movimiento de rotación. c) La voluta es una parte fija que está dispuesta en forma de caracol alrededor del rodete a su salida, de tal manera que la separación entre ella y el rodete es mínima en la parte superior, y va aumentando hasta que las partículas líquidas se encuentran frente a la abertura de impulsión. Su misión es la de recoger el líquido que abandona el rodete a gran velocidad, cambiar la dirección de su movimiento y encaminarle hacia la brida de impulsión de la bomba. La voluta es también un transformador de energía, ya que frena la velocidad del líquido, transformando parte de la energía dinámica creada en el rodete en energía de presión, que crece a medida que el espacio entre el rodete y la carcasa aumenta, presión que se suma a la alcanzada por el líquido en el rodete. En algunas bombas existe, a la salida del rodete, una corona directriz de álabes que guía al líquido antes de introducirlo en la voluta. d) Una tubería de impulsión, instalada a la salida de la voluta, por la que el líquido es evacuado a la presión y velocidad creadas en la bomba. 28 MANTENIMIENTO INDUSTRIAL Fig. 161.− Bomba centrífuga, disposición, esquema y perspectiva Este es, en general, el funcionamiento de una bomba centrífuga aunque existen distintos tipos y variantes. La estructura de las bombas centrífugas es análoga a la de las turbinas hidráulicas, salvo que el proceso energético es inverso; en las turbinas se aprovecha la altura de un salto hidráulico para generar una velocidad de rotación en la rueda, mientras que en las bombas centrífugas la velocidad comunicada por el rodete al líquido se transforma, en parte, en presión, lográndose así su desplazamiento y posterior elevación. Los principales tipos de bombas centrífugas son: A) Radiales, axiales y diagonales. B) De impulsor abierto, semiabierto y cerrado. C) Horizontales y verticales. 29 MANTENIMIENTO INDUSTRIAL A) BOMBAS RADIALES, AXIALES Y DIAGONALES Se ha considerado como bombas centrífugas desde las propiamente centrífugas o radiales, en las que la energía se cede al líquido esencialmente mediante la acción de la fuerza centrífuga, hasta las axiales, en las que la energía se cede al líquido por la impulsión ejercida por los álabes sobre el mismo. En las bombas centrífugas radiales la corriente líquida se verifica en planos radiales, en las axiales en superficies cilíndricas alrededor del eje de rotación y en las diagonales radial y axialmente, denominándose también de flujo mixto. B) BOMBAS DE IMPULSOR ABIERTO, SEMIABIERTO Y CERRADO Teniendo en cuenta su diseño mecánico o estructural, se pueden distinguir tres tipos de impulsores: B.1) De álabes aislados (abiertos) B.2) Con una pared o disco lateral de apoyo (semiabiertos) B.3) Con ambas paredes laterales (cerrados). Esta clasificación es independiente de la más general, que se refiere al tipo de diseño hidráulico, por lo que en esta nueva clasificación puede haber impulsores centrífugos y de flujo mixto, abiertos, semiabiertos o cerrados. Los impulsores axiales, por su misma estructura, sólo pueden ser semiabiertos o cerrados, ya que sus álabes se pueden considerar como apoyados lateralmente en el eje de rotación, que hace las veces de cubo del impulsor, como si fuese la pared posterior de los radiales y diagonales. 30 MANTENIMIENTO INDUSTRIAL B.1) IMPULSORES ABIERTOS.- En un impulsor abierto, los álabes desnudos van unidos únicamente al eje de giro y se mueven entre dos paredes laterales fijas pertenecientes a la carcasa de la bomba, con tolerancias laterales lo más estrechas posibles para evitar fugas. Esta construcción es mecánicamente débil, por el largo voladizo en que trabajan los álabes, por lo que estos impulsores disponen siempre de una fracción de pared posterior para dar a los álabes la rigidez necesaria, Fig. 164. En la práctica no se hace distinción entre impulsores abiertos y semiabiertos, designando a ambos como abiertos, en oposición a los cerrados. Los impulsores abiertos se utilizan en algunas bombas radiales pequeñas y para el bombeo de líquidos abrasivos. 31 MANTENIMIENTO INDUSTRIAL B.2) IMPULSORES SEMIABIERTOS.- Los impulsores con una sola pared lateral, que siempre es la posterior, se emplean con cierta frecuencia, destacando las bombas de flujo mixto y todas las axiales. Al igual que en los abiertos, su buen rendimiento está basado en una tolerancia lateral muy estrecha, del orden de 0,3 mm, que evita fugas de la periferia al centro y en los canales del impulsor entre sí. Estas fugas son tanto mayores cuanto menos viscoso es el líquido por lo que con líquidos algo viscosos el caudal y la altura pueden aumentar, a pesar de las mayores pérdidas por rozamiento, lo que les hace más apropiados que los abiertos para trabajar con líquidos a altas temperaturas. El desgaste del impulsor es proporcional a la velocidad relativa del líquido y no es radialmente uniforme, sino algo mayor en la periferia; cuando el juego lateral se hace grande por el desgaste, hay que cambiar el impulsor. Para el servicio con líquidos abrasivos algunas veces se disponen placas laterales de desgaste de fácil intercambio, construidas con materiales especiales como el acero inoxidable que tiene mayor dureza, que no resulta costoso, ya que la carcasa de la bomba sigue siendo de fundición. La escasa tolerancia lateral del impulsor hace que una posible desviación del eje pueda tener graves consecuencias, al igual que las dilataciones o contracciones anormales, que en esta situación tienen mucha mayor importancia que en los impulsores cerrados. El empuje axial en los impulsores abiertos es mayor que en los cerrados, pues la parte anterior está sometida a una presión media menor; para paliar este defecto se les provee de álabes posteriores Fig. 165, que disminuyen en gran manera la presión media en la cara posterior. También sirven para evitar que el líquido quede estancado cerca del eje y empaquetaduras, ya que si el líquido fuese abrasivo podría resultar muy perjudicial. 32 MANTENIMIENTO INDUSTRIAL Las ventajas del impulsor abierto sobre el cerrado son: • La menor tendencia a obstruirse que le hace adecuado para líquidos sucios. • El menor roce hidráulico del disco, al tener sólo una pared girando, de lo que se deduce un buen rendimiento. • Una mayor accesibilidad de los álabes para el mecanizado, lo que permite conseguir mejores acabados. • Una mayor facilidad de construcción, con modelos más sencillos, por lo que se puede utilizar una mayor variedad de materiales constructivos con un coste menor de fabricación. Aunque al principio los impulsores se hacían abiertos, de doble aspiración, hoy en día han caído en desuso por dificultades de ajuste y sólo se fabrican los de aspiración simple. B.3) IMPULSORES CERRADOS.- Los impulsores cerrados tienen los álabes colocados entre dos paredes laterales, anterior o de aspiración y posterior, Fig. 164. El estrecho margen de tolerancias existente para evitar fugas de retroceso entre la impulsión y la aspiración suele ser axial y está constituida por unas superficies anulares muy próximas, situadas alrededor del orificio de aspiración (oído del impulsor) y formadas por los aros de cierre, uno montado en la carcasa y el otro que gira montado en el impulsor. La principal ventaja de esta solución es que los aros de cierre se pueden cambiar fácilmente cuando se desgastan, recuperando la tolerancia primitiva, evitando así fugas mayores. Respecto al desgaste, se pueden hacer de materiales especiales para condiciones de funcionamiento y servicio particularmente duras. 33 MANTENIMIENTO INDUSTRIAL A menudo, en vez de estos aros dobles se utiliza sólo un aro montado en la carcasa, de forma que la superficie rozante móvil pertenece al propio impulsor; en estos casos, en el impulsor se deja material suficiente para poder rectificar su superficie desgastada, si procede, cambiando el aro de la carcasa por uno nuevo de diámetro ligeramente diferente, de forma que deje el juego conveniente con el impulsor. Los impulsores de doble aspiración llevan aros de cierre en los dos oídos; sus ventajas son, ausencia de empuje axial, una menor NPSHr (altura neta de succión positiva requerida) y una mayor capacidad de aspiración. Se pueden considerar como dos impulsores de aspiración simple, opuestos y en paralelo. Los impulsores de simple aspiración, cuando están provistos en la parte posterior de una cámara de equilibrado del empuje hidráulico axial en comunicación con la aspiración a través de los agujeros de equilibrio, sólo tienen aros a ambos lados, lo que implica una desventaja para el equilibrado que, hidráulicamente, es bastante eficaz. Los impulsores cerrados pueden resistir mucho mejor cualquier flexión del eje, o contracciones y dilataciones mayores de las previstas, por lo que son más adecuados para servicios de altas temperaturas. Tienen la desventaja de que sus canales son normalmente inaccesibles para cualquier tipo de mecanizado, lo que exige métodos constructivos especiales más difíciles que en los abiertos. Hidráulicamente, el rozamiento de disco al tener el impulsor dos paredes, es doble que en los abiertos, pero las pérdidas volumétricas son menores. La posibilidad de obstrucción con líquidos sucios es mayor y para ello se diseñan impulsores especiales con oído de gran área, canales lo más amplios posibles, pequeño número de álabes, 2 ó 3, y éstos con los bordes de entrada redondeados. C) BOMBAS HORIZONTALES Y VERTICALES El eje de rotación de una bomba puede ser horizontal o vertical, (rara vez inclinado). De esta disposición se derivan diferencias estructurales en la construcción de la bomba que a veces son importantes, por lo que también las aplicaciones de los dos tipos de construcción suelen ser, a menudo, distintas y bien definidas. C.1) BOMBAS HORIZONTALES.- La disposición del eje de giro horizontal presupone que la bomba y el motor se hallan a la misma altura; éste tipo de bombas se utiliza para funcionamiento en seco, exterior al líquido bombeado que llega a la bomba por medio de una tubería de aspiración. 34 MANTENIMIENTO INDUSTRIAL Las bombas centrífugas, sin embargo, no deben rodar en seco, ya que necesitan del líquido bombeado como lubricante entre aros rozantes e impulsor, y entre empaquetadura y eje. Figura 167.- SECCIÓN TRANSVERSAL DE UNA BOMBA CENTRIFUGA HORIZONTAL MODERNA Como no son autoaspirantes requieren, antes de su puesta en marcha, el estar cebadas; esto no es fácil de conseguir si la bomba no trabaja en carga, estando por encima del nivel del líquido, que es el caso más corriente con bombas horizontales, siendo a menudo necesarias las válvulas de pie, (aspiración), y los distintos sistemas de cebado. Como ventajas específicas se puede decir que las bombas horizontales, (excepto para grandes tamaños), son de construcción más barata que las verticales y, especialmente, su mantenimiento y conservación es mucho más sencillo y económico; el desmontaje de la bomba se suele hacer sin necesidad de mover el motor y al igual que en las de cámara partida, sin tocar siquiera las conexiones de aspiración e impulsión. C.2) BOMBAS VERTICALES.- Las bombas con eje de giro en posición vertical tienen, casi siempre, el motor a un nivel superior al de la bomba, por lo que es posible, al contrario que en las horizontales, que la bomba trabaje rodeada por el líquido a bombear, estando, sin embargo, el motor por encima de éste. C.2a) Bombas verticales de funcionamiento en seco.- En las bombas verticales no sumergidas, el motor puede estar inmediatamente sobre la bomba, o muy por encima de ésta. El elevarlo responde a la necesidad de protegerlo de una posible inundación o para hacerlo más accesible si, por ejemplo, la bomba trabaja en un pozo. El eje alargado puede ser rígido o flexible por medio de juntas universales, lo que simplifica el siempre difícil problema del alineamiento. Se emplean muy a menudo las mismas bombas horizontales modificadas únicamente en sus cojinetes. 35 MANTENIMIENTO INDUSTRIAL La aspiración es lateral, (horizontal); en las bombas grandes, frecuentemente, es por abajo, aunque a veces se transforma en lateral mediante un simple codo. La ventaja de las bombas verticales, es que requieren muy poco espacio horizontal que las hace insustituibles en barcos, pozos, etc.; sin embargo se necesita un espacio vertical superior suficiente para permitir su cómodo montaje y desmontaje. Para bombas de gran caudal, la construcción vertical resulta en general más barata que la horizontal. Las bombas verticales se emplean normalmente en aplicaciones marinas, para aguas sucias, drenajes, irrigación, circulación de condensadores, etc. C.2b) Bombas verticales sumergidas.- El funcionamiento sumergido de las bombas centrífugas elimina el inconveniente del cebado, por lo que el impulsor se halla continuamente, aún parado rodeado por el líquido a impulsar y, por lo tanto, la bomba está en disposición de funcionar en cualquier momento. El control de la unidad requiere únicamente la puesta en marcha del motor de accionamiento, sin necesidad de dispositivos adicionales de cebado previo. La aspiración, que es siempre por abajo, Fig. 168, se hace a una cierta profundidad con respecto al nivel libre del líquido. Si esta profundidad es menor de lo debido, 2 ó 3 veces el diámetro del orificio de aspiración, se pueden crear en la superficie vórtices o remolinos por cuyo centro se introduce aire en la bomba, con la consiguiente pérdida de caudal y deficiente funcionamiento. El eje del que van provistas estas bombas, va guiado normalmente por cojinetes de fricción separados a intervalos regulares (de 1,5 a 3 metros) y lubricados por aceite, grasa, o el mismo líquido bombeado; en este último caso, el eje se suele disponer en el interior de la tubería de impulsión vertical, cerca del motor, en que ésta se desvía horizontalmente mediante un codo adecuado. 36 MANTENIMIENTO INDUSTRIAL En los casos de lubricación por grasa o aceite, el eje va dentro de un tubo portador de los cojinetes, siendo este conjunto, a su vez, exterior o interior a la tubería de impulsión. La otra solución tiene la ventaja de requerir un menor espacio, siendo en ambos casos innecesaria la empaquetadura, lo que constituye también una circunstancia muy favorable, dados los inconvenientes que ésta lleva a veces consigo. Las bombas sumergidas tienen la ventaja de ocupar un espacio horizontal mínimo, sólo el necesario para acomodar el motor vertical y la impulsión, siendo incluso ésta a veces subterránea. Las ventajas hidráulicas son evidentes al desaparecer todos los problemas de aspiración que constituyen el principal inconveniente en el funcionamiento de las bombas centrífugas. Desde un punto de vista mecánico, esta disposición presenta grandes inconvenientes con respecto a la horizontal. Las bombas son inicialmente más caras y su mantenimiento mucho más elevado, ya que cualquier reparación exige el desmontaje de la bomba para izarla a la superficie. El eje alargado, somete a los cojinetes a un trabajo duro que sobre todo, si están lubricados por agua o líquidos sin grandes propiedades lubricantes, hace que su vida sea corta e imprevisible. Los tipos más importantes de bombas verticales sumergidas son: C.2b1) Las bombas de turbina verticales o de pozo profundo. C.2b2) Las bombas de hélice. C.2b1) BOMBAS DE TURBINA VERTICALES.- Entre las bombas sumergidas, las más importantes son las llamadas de pozo profundo, de sondeo o de turbina vertical, que fueron desarrolladas para la explotación de pozos, perforaciones y sondeos de diámetro reducido, lo que limita la altura por etapa, e implica la utilización de bombas multicelulares para reducir el espacio. El impulsor de aspiración simple, puede ser radial o diagonal, según las condiciones de servicio y su construcción cerrada o semiabierta. Los impulsores semiabiertos, sin embargo, aparte de su mayor empuje axial, hasta el 50% mayor, requieren un ajuste vertical más cuidadoso durante el montaje. El conjunto de difusores de la bomba y la tubería de impulsión, cuelgan del cabezal sobre el que va montado el motor. 37 MANTENIMIENTO INDUSTRIAL A veces, los difusores se recubren interiormente de un esmalte especial que disminuye la rugosidad de la fundición y las pérdidas hidráulicas consiguientes, aumentando el rendimiento, dotando de una cierta uniformidad a las distintas unidades, lográndose una mejor resistencia a la corrosión y a la abrasión. La construcción de estas bombas permite montar el número de etapas deseado, que puede llegar a 20 o más, añadiendo difusores e impulsores semejantes uno sobre otro, lo que dota de cierta elasticidad a las aplicaciones, con las consiguientes ventajas de estandarización, disponibilidad de repuestos, etc.; no obstante, estas bombas participan de las desventajas mencionadas para las bombas verticales sumergidas, de ser caras y exigir unos costes de mantenimiento elevados. Las bombas verticales de turbina han llegado a un grado de perfección notable con rendimientos altos y determinadas ventajas hidráulicas; aunque empezaron siendo empleadas exclusivamente para riegos en pozos y perforaciones, sus aplicaciones industriales aumentan cada vez más, siendo en la actualidad más numerosas que las agrícolas, por lo que la denominación de bombas de pozo profundo va desapareciendo para adaptarse a la de bombas de turbina vertical. Dentro de este tipo se pueden distinguir las bombas provistas de eje alargado y accionadas por motor sumergible dispuesto inmediatamente por debajo de la bomba o bombas buzo. C.2b1a) BOMBAS DE TURBINA VERTICALES CON EL MOTOR POR ENCIMA.- En estas bombas, el eje va por el interior de la tubería de impulsión, desnudo si la lubricación es por aceite, o dentro de un tubo protector si la lubricación es por agua de una fuente externa. El conjunto de impulsores y eje soportado por los cojinetes de empuje están colocados en el mismo cabezal o en la parte superior del motor, si su eje y el de la bomba están rígidamente acoplados (motores de eje hueco). Con estas bombas se pueden alcanzar unos 200 m.c.a., pero los problemas que ocasionan las imperfecciones en la rectitud del eje, influyen en gran manera en la vida de los cojinetes y en las vibraciones durante el funcionamiento, que crecen en gran manera con la longitud del eje. C.2b1b)BOMBAS DE TURBINA VERTICALES CON EL MOTOR SUMERGIDO.- Con objeto de evitar las desventajas que se derivan de la excesiva longitud del eje, en las bombas sumergidas se han desarrollado motores eléctricos capaces de funcionar rodeados de líquido y de dimensiones tales que les permite ir montados en el interior del pozo. 38 MANTENIMIENTO INDUSTRIAL De esta forma, colocando los motores inmediatamente por debajo de la bomba, desaparece la necesidad del eje, cojinetes y tubo protector, por lo que la tubería de impulsión puede ser de menor diámetro para pérdidas de carga semejantes. Los motores pueden ser de funcionamiento en seco con cierre hermético, o inundados, en cuyo caso los aislamientos han de tener características muy especiales. Las ventajas del motor sumergido se hacen apreciables, sobre todo, en pozos muy profundos de más de 30 m, o bien inclinados o curvados. El espacio requerido en la superficie es, evidentemente mínimo e incluso nulo con descarga subterránea. Las desventajas son un menor rendimiento y menor vida del motor y la necesidad ineludible del desmontaje total para cualquier revisión o reparación de la bomba o del motor. Figura 169.- Bomba con el motor sumergido C.2b2) BOMBAS VERTICALES DE HÉLICE.- Para manejar grandes caudales con pequeñas alturas se usan, a menudo, bombas hélice en posición vertical y funcionamiento sumergido. La simplicidad de estas bombas llega algunas veces a ser máxima, consistiendo sólo en el impulsor axial abierto provisto de un eje vertical, que gira dentro de la tubería de impulsión. A veces pueden llevar un difusor o algunos álabes directores; a la entrada se pueden disponer también álabes directores con objeto de evitar o reducir una prerotación excesiva de la vena líquida en la aspiración, que puede dar lugar a remolinos o vórtices en la superficie del líquido. El eje puede estar lubricado por aceite, en cuyo caso va dispuesto dentro del correspondiente tubo protector con los cojinetes de apoyo. 39 MANTENIMIENTO INDUSTRIAL El impulsor puede ir en voladizo o bien tener cojinete inferior, que aunque constituye un pequeño estorbo para la aspiración, tiene un papel importante dado la estrecha tolerancia radial entre el impulsor y la tubería que le rodea. En ciertas bombas de este tipo es posible desmontar el eje y el impulsor desde arriba, sin necesidad de retirar la tubería de impulsión, facilitándose algo la accesibilidad y el mantenimiento, lo que es posiblemente el más grave inconveniente de las bombas sumergidas. CARACTERÍSTICAS DE LAS BOMBAS 1) CONOCIMIENTOS PREVIOS Antes de entrar en profundidad en el tema debemos partir de unos conocimientos previos, para ello definiremos los conceptos claves para tu total comprensión: MEDIDA DE PRESIÓN Las presiones suelen expresarse tomando como referencia un origen arbitrario. Los manómetros miden la diferencia entre la presión del fluido y la presión atmosférica local. Por lo tanto hay que sumar esta última al valor indicado por el manómetro para hallar la presión absoluta. Una lectura negativa de manómetro indica un vacío parcial. Presión absoluta = Presión local atmosférica + Presión manométrica Presión absoluta = Presión local atmosférica - Presión manométrica (si es negativa, de succión o vacío) Figura 170 40 MANTENIMIENTO INDUSTRIAL MEDIDA DE ALTURAS El plano de referencia lo determina la altura de la bomba. H: Altura estática de impulsión Z1: Altura estática de aspiración (-, al encontrarse por debajo de la bomba) Z2: Carga estática de aspiración (+, al estar por encima del plano de referencia) Altura total de aspiración para el caso a) = (Z1 - pérdidas por rozamiento) Es negativa porque Z1 es negativa. Altura total de aspiración para el caso b) = (Z2 – pérdidas por rozamiento) Puede ser positiva o negativa porque Z2 es positiva. Altura total de impulsión = H + pérdidas de carga en la impulsión Altura total = Altura total de impulsión – Altura total de aspiración Es la medida del incremento de energía que transmite la bomba al líquido Figura 171 41 MANTENIMIENTO INDUSTRIAL NPSH REQUERIDA DE LA BOMBA Es una característica propia de la bomba, se define como la energía necesaria para llenar la parte de aspiración y vencer las pérdidas por rozamiento y aumentar la velocidad. En definitiva es la energía del líquido que una bomba necesita para funcionar satisfactoriamente. Su valor puede determinarse tanto por prueba como por cálculo. Para una bomba centrífuga el NPSH requerido es la cantidad de energía necesaria, expresada en metros columna de líquido para: • Vencer las pérdidas de carga desde la abertura de admisión (entrada) a los álabes del impulsor. • Crear la velocidad deseada de corriente a los álabes, ya que es necesaria una velocidad mínima. Para una bomba rotativa el NPSH requerido es la energía expresada en Kg/cm2 precisada para: • Vencer las pérdidas desde la abertura de admisión a los engranajes o paletas. • Crear la velocidad deseada de entrada a los engranajes o paletas. NPSH DISPONIBLE DEL SISTEMA Es una característica del sistema y se define como la energía que tiene un líquido en la toma de aspiración de la bomba (independientemente del tipo de esta) por encima de la energía del líquido debida a su presión de vapor. La NPSH disponible puede ser calculada u obtenida tomando lecturas de prueba en el lado de aspiración de la bomba. Para su cálculo es necesario considerar tanto la energía potencial como la cinética y la de presión. 42 MANTENIMIENTO INDUSTRIAL ALTURA DE PRESIÓN O CARGA DESARROLLADA POR UNA BOMBA Figura 172 La altura de presión o carga total desarrollada por una bomba se define mediante la siguiente ecuación: Donde: H es la altura de presión total desarrollada por la bomba, expresada en metros de columna del líquido que impulsa. P1: presión en el espacio de aspiración, expresada en Nw/m2 o Pa P2, es la presión en el espacio de impulsión, expresada igual que la anterior ρ es la densidad del líquido que se bombea expresada en Kg/m3 Hg es la altura geométrica de elevación del líquido, en m hs es la altura de presión necesaria para crear la velocidad y superar el rozamiento y todas las resistencias locales en las horas de succión y de impulsión, expresadas en m g es la aceleración de la caída libre, su valor g =9,81 m/sg2 43 MANTENIMIENTO INDUSTRIAL CAVITACIÓN Este fenómeno sucede cuando un líquido se mueve por una región (tubería) donde la presión del líquido es menor que la tensión de vapor, lo que hace que el líquido hierva y se formen burbujas de vapor en su seno. Estas burbujas de vapor son arrastradas con el líquido hasta una región donde se alcanza una presión más elevada y allí desaparecen violentamente, provocando que el líquido se introduzca a alta intensidad en áreas reducidas. Estas sobrepresiones que se producen pueden sobrepasar la resistencia a la tracción del material y arrancar partículas del metal dándole una apariencia esponjosa (picado de los álabes del impulsor). Cuando estas burbujas de vapor llegan a la zona de alta presión desaparecen, ocasionando ruido y vibración, pudiendo llegar a producir averías en rodamientos, rotura del eje y otros fallos, ya que el material esta desgastado. En resumen la cavitación es la formación de burbujas de vapor o de gas en el seno de un líquido, causada por las variaciones que este experimenta en su presión, y cuyas consecuencias son: • Disminución de la capacidad de bombeo. • Disminución del rendimiento de la bomba. La cavitación indica un NPSH disponible insuficiente, ocasionado por una altura estática baja, alta temperatura o excesiva pérdida de carga en la aspiración. Este fenómeno puede evitarse manteniendo la presión del líquido por encima de la presión de vapor. ENCEBADO DE BOMBAS Algunos tipos de bombas para su correcto funcionamiento necesitan estar llenas de fluido, en caso que estén llenas de aire no funcionarían correctamente, es lo que se conoce como cebado de la bomba. Este fenómeno se produce en concreto en las bombas centrífugas, estas son máquinas sin capacidad autocebante, al contrario que las bombas de desplazamiento positivo que en general son todas autocebantes; es decir aún llenas de aire son capaces de llenar de fluido el circuito de aspiración. En un circuito como el mostrado en el esquema siguiente, sin ningún dispositivo adicional, al parar la bomba centrífuga el fluido del circuito de aspiración cae hacia el depósito vaciándose la bomba. 44 MANTENIMIENTO INDUSTRIAL Esquema de una bomba instalada sobre el nivel de agua. Figura 173 La altura de elevación H que proporciona la bomba es siempre la misma y responde a la siguiente fórmula: Donde PI es la presión de impulsión, PA es la presión de aspiración, ρ es la densidad del fluido y g la aceleración de la gravedad. Despejando la diferencia de presiones se tiene que: De esta fórmula se puede observar que la diferencia de presiones que consigue la bomba entre la impulsión y la aspiración es mayor cuanto mayor sea la densidad del fluido a mover. De tal forma que para el caso concreto del agua se tiene: Con lo cual: 45 MANTENIMIENTO INDUSTRIAL Es decir, si la bomba está llena de aire la presión de aspiración es 0,00129 veces la que conseguiría dicha bomba si estuviese llena de agua, es decir, si estuviese cebada. Por lo que si la bomba está vacía la altura que se eleva el agua en el circuito de aspiración sobre el nivel del agua en el depósito es mínima y totalmente insuficiente para que el agua llegue a la bomba. Por otra parte el funcionamiento de una bomba centrífuga en vacío puede estropear el sellado de la bomba debido a una deficiente refrigeración dado que no circula fluido por su interior que ayuda a mejorar la disipación del calor producido por la bomba. Por lo tanto en instalaciones de bombeo cuyo esquema coincide con el indicado en el esquema adjunto es necesario un sistema adicional para evitar que la bomba se descebe. Algunos de estos sistemas se enumeran a continuación: Se puede construir un orificio en la parte superior de la carcasa de la bomba y arrojar agua sobre el mismo para que la bomba al encenderse esté llena de agua y pueda bombear correctamente. No se trata de un sistema muy eficiente. Se puede usar una válvula de pie. Permite el paso del líquido hacia la bomba pero impiden su regreso al depósito una vez se ha apagado la bomba con lo que impide el descebe de la tubería de impulsión. Puede presentar problemas cuando el fluido tiene suciedad que se deposita en el asiento de la bomba disminuyendo su estanqueidad, por otra parte supone una pérdida de carga más o menos importante en la tubería de impulsión por lo que aumenta el riesgo de que se produzca cavitación en la bomba. Uso de una bomba de vacío. La bomba de vacío es una bomba de desplazamiento positivo que extrae el aire de la tubería de impulsión y hace que el fluido llegue a la bomba centrífuga y de este modo quede cebada. Por último otra posibilidad consiste en instalar la bomba bajo carga, es decir por debajo del nivel del líquido, aunque esta disposición no siempre es posible, a no ser que se instale sumergida, con lo cual la bomba tiene que ser especial. VISCOSIDAD Además de la cavitación existen otros parámetros que afectan al funcionamiento de una bomba, uno de ellos es la viscosidad. La potencia absorbida de una misma bomba crece de forma aguda al pasar a manejar líquidos de mayor viscosidad, por lo que también se verá alterado su rendimiento, disminuyendo este al ir aumentando la viscosidad, mientras que su NPSH requerido seguirá siendo esencialmente el mismo. 46 MANTENIMIENTO INDUSTRIAL RENDIMIENTO DEL GRUPO MOTOR-BOMBA 2) CARACTERÍSTICAS DE LAS BOMBAS Caudal El caudal de una bomba está determinado por la siguiente relación: CAUDAL = CILINDRADA x VELOCIDAD El caudal así obtenido es llamado caudal teórico, que es simplemente superior al caudal real en función del rendimiento volumétrico de la bomba, es decir de las fugas internas de la misma. Se define el rendimiento volumétrico como la relación entre el caudal real y el caudal teórico. Este rendimiento volumétrico oscila entre el 80% y el 99% según el tipo de bomba, su construcción y sus tolerancias internas, y según las condiciones especificas de velocidad, presión, viscosidad del fluido, temperatura, etc. El rendimiento mecánico mide las pérdidas de energía mecánica que se producen en la bomba, debidas al rozamiento y a la fricción de los mecanismos internos. Es esencial evitar la fricción y el rozamiento en el interior de la bomba, de tal manera que la energía que se comunica al eje de la bomba se invierta, en el mayor grado posible, en aumentar la presión del líquido y no en vencer rozamientos y fricciones excesivas entre las partes mecánicas de la bomba. En términos generales se puede afirmar que una bomba de bajo rendimiento mecánico es una bomba de desgaste acelerado, principalmente debido al rozamiento que sufren las partes en movimiento. El rendimiento total de una bomba es el producto de sus rendimientos volumétrico y mecánico. El rendimiento total de una bomba nueva puede oscilar entre el 47 MANTENIMIENTO INDUSTRIAL 50 y el 90%, valores que disminuirán con el uso y el desgaste de los elementos de estanqueidad interna propia de la bomba. Presión de Trabajo Todos los fabricantes otorgan a sus bombas un valor denominado presión máxima de trabajo, algunos incluyen las presiones de rotura o la presión máxima intermitente, y otros adjuntan la gráfica de presión /vida de sus bombas. Estos valores los determina el fabricante en función de una duración razonable de la bomba trabajando en condiciones determinadas. El valor de la presión máxima de trabajo suele calcularse para una vida de 10000 horas; en algunos casos se especifican también las presiones máximas intermitentes o puntales. Vida Útil La vida útil de una bomba viene determinada por el tiempo de trabajo desde el momento en que se instala hasta el momento en que su rendimiento volumétrico haya disminuido hasta un valor inaceptable. Sin embargo este punto varía mucho en función de la aplicación. Así por ejemplo hay instalaciones donde el rendimiento no puede ser inferior al 90%, mientras que otras se puede aprovechar la bomba incluso cuando su rendimiento es inferior al 50%. La vida de una bomba también varía considerablemente en función del nivel de contaminación del fluido con el que se está trabajando. Presión Vida de las bombas 500 400 300 200 100 0 1 2 3 4 5 6 7 M iles de horas de uso Figura 174 48 MANTENIMIENTO INDUSTRIAL Efecto de la Viscosidad Las bombas centrífugas también se utilizan para bombear líquidos con viscosidades diferentes a las del agua. Al aumentar la viscosidad, la potencia requerida aumenta. Dos de las principales pérdidas en una bomba centrífuga son por fricción con el fluido y fricción con el disco. Estas pérdidas varían con la viscosidad del líquido, de manera que la carga - capacidad de salida, así como de la toma mecánica difiere de los valores que se obtienen cuando se maneja agua. Se han hecho muchas pruebas experimentales para determinar el efecto de la viscosidad del líquido en el funcionamiento de diversas bombas centrífugas. Aun con datos muy extensos sobre el efecto de la viscosidad. Es difícil predecir con precisión el funcionamiento de una bomba cuando maneje un fluido viscoso de su comportamiento cuando emplea agua fría. Cuando se aplican bombas ordinarias de agua fría para usarse en el bombeo de líquidos viscosos, se debe tener cuidado para asegurarse de que el diseño de la flecha es lo bastante fuerte para la potencia necesaria, que puede ser un considerable esfuerzo en los caballos de fuerza al freno para agua fría, aunque pueda ser el peso específico del líquido menor que el del agua. Tipos de pérdida Las pérdidas de energía en el interior de la bomba son de tres especies: Pérdida hidráulica: debido a un frotamiento continuo para accidentales que el líquido encuentran al atravesar la bomba. Pérdidas volumétricas: debidas a las fugas que eventualmente se pueden producir al pasar el líquido a través de la bomba, las razones pueden ser las diferencias de presiones que existen entre las partes fijas y móviles de la bomba. Otras fugas importantes son por creación de gases o vapores que ocupan un volumen concentrado en el interior de la bomba, lo que provoca la disminución del caudal. Pérdida mecánica: debido a los frotamientos mecánicos en el las partes fijas y las partes móviles de la bomba, como por ejemplo en los pernos y cojinetes, entre pistones y cilindros, etc. 49 MANTENIMIENTO INDUSTRIAL Curvas Características de una Bomba Las curvas características de las bombas son relaciones gráficas entre la carga, el gasto, la potencia y el rendimiento. Excepto cuando se trata de bombas de muy pequeño tamaño, es indispensable conocer las curvas características antes de adquirir una bomba, ya que sólo así podremos saber el comportamiento de ella una vez instalada en un determinado sistema hidráulico. Curva Q (Gasto) – H (Carga Total) En esta curva se lleva el gasto y la carga total a velocidad constante. El valor de H que resulta para Q=0 es la presión que desarrolla la bomba cuando la válvula de salida está totalmente cerrada y es generalmente entre un 15% y un 30% superior a presión normal. Las bombas centrifugas, al contrario de las de émbolo, permiten que se cierre la válvula de salida, pues se presión de estrangulamiento es limitada y su caja resiste perfectamente esa presión. Las curvas pueden ser crecientes o decrecientes, denominadas estables o inestables. Curva Estable Curva Inestable Las bombas de curva QH inestable tiene grandes problemas para ponerlas en paralelo debido a que cuando está funcionando en la parte alta de la curva, la otra no puede entrar en servicio ya que su presión es menor. También se habla de curvas Planas o Inclinadas según sea la pendiente. Curva Inclinada Curva Plana 50 MANTENIMIENTO INDUSTRIAL Las bombas de curva QH inclinadas son más convenientes cuando las condiciones de altura de elevación son variables, ya que para cuna variación de H la variación de Q es mucho menor que en el caso de una curva plana. Curva HP (Potencia) – Q (Gasto) Se puede observar que el mínimo de potencia se produce para un gasto cero, o sea con la válvula de salida cerrada. La potencia se gasta sólo en sostener el agua contra la válvula y no hay consumo de energía para hacerla circular por el sistema. Es potencia es aproximadamente un 50% - 60% de la potencia normal de funcionamiento. Curva R (Rendimiento) – Q (Gasto) Se representa el gasto y el rendimiento en porcentaje, siempre con la velocidad constante. Para Q=0, R=0. Luego llega a su máximo para la condición de funcionamiento normal. Después empieza a descender. El ideal es que la curva sea plana en el tramo que nos interesa. Curva de Carga del Sistema Si consideramos el sistema hidráulico dentro del cual opera la bomba, podemos dibujar una curva que nos dé en abscisas el Gasto y en ordenadas las Pérdidas de carga totales, es decir la suma de las pérdidas de carga por frotamiento en las cañerías y de las pérdidas de carga de tipo singular. Si hacemos que esta curva, en vez de partir de cero, corte a eje de las ordenadas en el punto Ho, igual a la altura estática total, tendremos lo que se denomina Curva de Carga del Sistema. Esta curva nos da la altura manométrica total de elevación para cada valor del gasto. Depende exclusivamente de las características hidráulicas del sistema. 51 MANTENIMIENTO INDUSTRIAL Punto de Funcionamiento Si combinamos la curva de carga del sistema con la curva QH de la bomba, obtenemos el punto de intersección de ambas, las características de funcionamiento, es decir el gasto y la altura con las cuales funcionará la bomba. Operación en Serie y en Paralelo En muchas instalaciones las bombas deben trabajar en serie y en paralelo. A continuación veremos cómo se combinan las curvas características de cada unidad cuando funcionan en conjunto. Bombas en Serie Supongamos dos bombas gemelas en serie, es decir que la impulsión de una llegue a la aspiración de la otra. En este caso el gasto que circula por ambas bombas es el mismo y para cada gasto se obtiene el doble de la carga correspondiente a una bomba. La curva QH resultante se obtiene duplicando para cada gasto la carga correspondiente Q1A=AB 52 MANTENIMIENTO INDUSTRIAL Si la curva de carga del sistema es la indicada con línea de segmentos, podemos observar que el gasto que se obtiene con las dos bombas es inferior al doble de que se obtiene con una sola 0-2 < 2 x (0-1). Del mismo modo la altura correspondiente a las dos bombas es inferior del doble de la correspondiente a una sola 2-4 < 2 x (1-3). La puesta en serie de dos bombas de distintas características es posible, pero ofrece dificultades. Se debe instalar la de mayor capacidad como primera etapa, ya que si no fuera así podría faltar alimentación a la bomba más potente. Bombas en Paralelo El caso de bombas en paralelo se presenta frecuentemente en la práctica. Las elevadoras se proyectan generalmente con dos o más unidades que pueden funcionar en paralelo. Las curvas resultantes se transforman como sigue: Para construir la curva resultante para dos bombas gemelas en paralelo, se suman los gastos para cada carga. O sea la curva parte del mismo punto en el eje de la H y se verifica que 1-2 = 2-3 Al combinarla con la curva de carga del sistema se puede ver que el gasto que dan las bombas en paralelo es inferior al doble del que da una sola: 0-B < 2 x (0-A) A pesar de que las bombas sean gemelas, siempre existen pequeñas diferencias, de modo que las curvas QH difieren ligeramente. La potencia del conjunto es igual a la suma de las potencias de cada bomba, de modo que para cada gasto llevamos la suma de las potencias en ordenadas. El rendimiento es el mismo que corresponde a una sola bomba. 53 MANTENIMIENTO INDUSTRIAL 3) SELECCIÓN DE BOMBAS Al seleccionar bombas para una aplicación dada, tenemos varias bombas entre las que elegir. Haremos lo posible para seleccionar una bomba que opere con un rendimiento relativamente alto para las condiciones de funcionamiento dadas. Los parámetros que se deben investigar incluyen la velocidad específica Ns, el tamaño D del impulsor y la velocidad de operación n. Otras posibilidades son el uso de bombas multietapa, bombas en serie, bombas en paralelo, etc. Incluso, bajo ciertas condiciones, limitar el flujo en el sistema puede producir ahorros de energía. El objetivo es seleccionar una bomba y su velocidad de modo que las características de funcionamiento de la bomba en relación al sistema en el cual opera sean tales que el punto de funcionamiento esté cerca del PMR (punto de máximo de rendimiento). Esto tiende a optimizar el rendimiento de la bomba, minimizando el consumo de energía. El punto de operación puede desplazarse cambiando la curva característica de la bomba, cambiando la curva característica del sistema o cambiando ambas curvas. La curva de la bomba puede modificarse cambiando la velocidad de funcionamientos de una bomba dada o seleccionando una bomba distinta con características de funcionamiento diferentes. En algunos casos puede ser una ayuda ajustar el impulsor, es decir, reducir algo su diámetro. Este impulsor más reducido se instala en la cubierta original. La curva característica del sistema puede cambiarse modificando el tamaño de la tubería o estrangulando el flujo. Una complicación que se presenta a menudo es que los niveles de ambos extremos del sistema no se mantienen constantes, como ocurre si los niveles de los depósitos fluctúan. En tal caso es difícil alcanzar un rendimiento alto para todos los modos de funcionamiento. En casos extremos a veces se utiliza un motor con velocidad variable. El procedimiento de selección de una bomba que permita una recirculación segura es selecciones una bomba que produzca el flujo de descarga Qa deseado. La curva E es la característica de carga y capacidad de la bomba y la curva a es la de carga del sistema para la descarga hacia el tanque A. La bomba funciona con una carga de Hop. Para incluir circulación continua en el sistema de bombeo, hay que aumentar el caudal de la bomba con la carga Hop de funcionamiento para mantener una descarga de Qa hacia el tanque A y, al mismo tiempo, una recirculación Qb de retorno al tanque B. Para lograrlo, se selecciona el tamaño inmediato mayor de impulsor con la curva de rendimiento F. 54 MANTENIMIENTO INDUSTRIAL 6.3.3. Ventiladores Un ventilador es una máquina de fluido concebida para producir una corriente de aire mediante un rodete con aspas que giran produciendo una diferencia de presiones. Entre sus aplicaciones, destacan las de hacer circular y renovar el aire en un lugar cerrado para proporcionar oxígeno suficiente a los ocupantes y eliminar olores, principalmente en lugares cerrados; así como la de disminuir la resistencia de transmisión de calor por convección. Fue inventado en 1882 por el estadounidense Schuyler S. Wheeler. Se utiliza para desplazar aire o gas de un lugar a otro, dentro de o entre espacios, para motivos industriales o uso residencial, para ventilación o para aumentar la circulación de aire en un espacio habitado, básicamente para refrescar. Por esta razón, es un elemento indispensable en climas cálidos. Un ventilador también es la turbomáquina que absorbe energía mecánica y la transfiere a un gas, proporcionándole un incremento de presión no mayor de 1.000 mmH2O aproximadamente, por lo que da lugar a una variación muy pequeña del volumen específico y suele ser considerada una máquina hidráulica. En la actualidad, en el diseño se tiene en cuenta la compresibilidad para incrementos de presión mucho menores, hasta 0,3 m.c.a., por lo que los ventiladores, hasta dicho incremento de presión, se pueden diseñar y considerar como una turbomáquina hidráulica. En energía, los ventiladores se usan principalmente para producir flujo de gases de un punto a otro; es posible que la conducción del propio gas sea lo esencial, pero también en muchos casos, el gas actúa sólo como medio de transporte de calor, humedad, etc.; o de material sólido, como cenizas, polvos, etc. Entre los ventiladores y compresores existen diferencias. El objeto fundamental de los primeros es mover un flujo de gas, a menudo en grandes cantidades, pero a bajas presiones; mientras que los segundos están diseñados principalmente para producir grandes presiones y flujos de gas relativamente pequeños. En el caso de los ventiladores, el aumento de presión es generalmente tan insignificante comparado con la presión absoluta del gas, que la densidad de éste puede considerarse inalterada durante el proceso de la operación; de este modo, el gas se considera incompresible como si fuera un líquido. Por consiguiente en principio no hay diferencia entre la forma de operación de un ventilador y de una bomba de construcción similar, lo que significa que matemáticamente se pueden tratar en forma análoga. Por lo común la denominación de ventilador se utiliza cuando la presión se eleva hasta unas 2 psig; entre esta presión y unas 10 psig, la máquina recibe del nombre de soplador. Para presiones de descarga más altas, el término que se usa es el de compresor. 55 MANTENIMIENTO INDUSTRIAL También de forma secundaria, se utiliza el ventilador para asistir a intercambiadores de calor como un disipador o a un radiador con la finalidad de aumentar la transferencia de calor entre un sólido y el aire o entre los fluidos que interactúan. Una clara aplicación de esto se ve reflejada en evaporadores y condensadores en sistemas de refrigeración en que el ventilador ayuda a transferir el calor latente entre el refrigerante y el aire, y viceversa. Asimismo, equipos de acondicionamiento de aire como la Unidad manejadora de aire (UMA), ocupan un ventilador centrífugo de baja presión estática para circular el aire por una red de ductos al interior de una edificación o instalación industrial. Suele haber circulación de aire o ventilación a través de los huecos en las paredes de un edificio, en especial a través de puertas y ventanas. Pero esta ventilación natural, quizá aceptable en viviendas, no es suficiente en edificios públicos, como oficinas, teatros o fábricas. Los dispositivos de ventilación más sencillos utilizados en lugares donde se necesita mucha ventilación son ventiladores instalados para extraer el aire viciado del edificio y favorecer la entrada de aire fresco. Los sistemas de ventilación pueden combinarse con calentadores, filtros, controladores de humedad y dispositivos de refrigeración. En definitiva, el ventilador es una bomba rotodinámica de gas que sirve para transportar gases, absorbiendo energía mecánica en el eje y devolviéndola al gas; se distingue del turbocompresor en que las variaciones de presión en el interior del ventilador son tan pequeñas, que el gas se puede considerar prácticamente incompresible. CLASIFICACION Los ventiladores que se emplean comúnmente se pueden dividir en tres tipos generales, de hélice, axiales y centrífugos. Los ventiladores se pueden disponer con variedad de posiciones de descarga y con rotación del impulsor, ya sea en el sentido de las agujas del reloj o viceversa. Salvo raras excepciones, se pueden proporcionar para acoplamiento directo o para bandas V. VENTILADOR DE HELICE.- Este ventilador consiste en una hélice dentro de un anillo o marco de montaje. La dirección de la corriente de aire es paralela a la flecha del ventilador. Se emplea para trasladar aire de un lugar a otro, o hacia el ambiente exterior, o para introducir aire fresco. Puede manejar grandes volúmenes de aire a una presión estática baja, raramente a presiones estáticas mayores de 25 mm de c.a. Se fabrica en muchos estilos y tipos para trabajos específicos. Los ventiladores de extracción (extractores) de uso normal, pueden tener desde 2 hasta 16 aspas, dependiendo ello del funcionamiento particular del ventilador. 56 MANTENIMIENTO INDUSTRIAL Generalmente las unidades de poco número de aspas se usan en ventiladores de baja presión y los que cuentan con un número mayor de aspas se emplean en aquellas aplicaciones que requieren presión. El ancho de las aspas, su ángulo, su velocidad axial y número de etapas, son factores todos que intervienen en el diseño y la capacidad. VENTILADOR AXIAL.- El ventilador axial es de diseño aerodinámico; los coeficientes de presión ψ oscilan entre (0,05 ÷ 0,6) pudiendo llegar en algunos diseños hasta 1. Este tipo de ventilador consiste esencialmente en una hélice encerrada en una envolvente cilíndrica. La adición de álabes-guía, detrás del rotor, convierten al ventilador tubo-axial en un ventilador axial con aletas guía. Puede funcionar en un amplio rango de volúmenes de aire, a presiones estáticas que van de bajas a medias y es capaz de desarrollar mayores presiones estáticas que el ventilador tubo-axial y ser más eficiente; los álabes-guía, en la succión o en la descarga, o en ambas partes, se han añadido para enderezar el flujo del aire fuera de la unidad. Aprovechando la conversión del componente rotativo de la corriente de aire, este ventilador puede alcanzar una presión estática más alta que el de tipo de hélice de aspas rectas, a la misma velocidad axial, y hacerlo más eficientemente. La facilidad de montaje y el flujo del aire en línea recta los hace ideales para muchas aplicaciones; por encima de 75 a 100 mm. de presión estática, los ventiladores axiales se usan pocas veces para servicios de ventilación. VENTILADOR CENTRIFUGO.- El ventilador centrífugo consiste en un rotor encerrado en una envolvente de forma espiral; el aire, que entra a través del ojo del rotor paralelo a la flecha del ventilador, es succionado por el rotor y arrojado contra la envolvente se descarga por la salida en ángulo recto a la flecha; puede ser de entrada sencilla o de entrada doble. En un ventilador de entrada doble, el aire entra por ambos lados de la envolvente succionado por un rotor doble o por dos rotores sencillos montados lado a lado. Los rotores se fabrican en una gran variedad de diseños, pudiéndose clasificar, en general, en aquellos cuyas aspas son radiales, o inclinadas hacia adelante, o inclinadas hacia atrás del sentido de la rotación. Los rotores pueden tener los tres tipos de álabes que se representan en la Fig. 175, y cuyas particularidades son las siguientes: 57 MANTENIMIENTO INDUSTRIAL Fig. 175.- Rodetes y triángulos de salida de los ventiladores centrífugos a) Con álabes curvados hacia adelante; b) Con álabes de salida radial; c) Con álabes curvados hacia atrás a) Alabes curvados hacia adelante, β2 > 90º.- Este tipo es poco frecuente en las bombas centrífugas; en los ventiladores se emplea a causa del bajo nivel de ruido que presentan. Otras características son: - Gran número de álabes de 48÷60 - Para una velocidad determinada caudal superior y dimensiones menores que las de cualquier otro tipo de ventilador - Rendimiento bajo, máximo del orden de 65÷75% por lo que en la actualidad este tipo de ventilador centrífugo tiende a ser reemplazado por los modernos ventiladores axiales. b) Alabes de salida radial, β2 = 90º.- Tienen menor número de álabes que los anteriores; se emplean para impulsar aire o gases sucios a elevada temperatura, gracias a la facilidad con que son eliminados los depósitos sólidos por la fuerza centrífuga. c) Alabes curvados hacia atrás, β2 < 90º.- Es el tipo normal de ángulo de salida en las bombas centrífugas. Tienen mejor rendimiento que los anteriores, ya que si los antiguos álabes de chapa se reemplazan por los más modernos de perfil aerodinámico, se llega a alcanzar un rendimiento del orden del 90%. Su presión y gasto másico son inferiores para una misma velocidad de rotación y número de álabes que en el primer tipo. El nivel de ruido es bajo. 58 MANTENIMIENTO INDUSTRIAL La Fig. 176 muestra las formas más corrientes de la admisión de los ventiladores. - La construcción (a) es la más sencilla pero la de peor rendimiento. - La construcción (c) con una forma abocinada más aerodinámica permite conseguir una entrada de la corriente en el rodete más uniforme, reduciéndose el choque a un mínimo. A veces se añade a la entrada, antes de la boca del ventilador, una caja como se muestra en la Fig. 177 o conducto de diferentes tipos, según lo requiera la instalación. Fig. 176.- Formas de la admisión de los ventiladores, a) Cilíndrica; b) Cónica; c) Abocinada; d) Compuesta; e) Guiada con álabes directores Fig. 177.- Disposición de la caja de entrada o cámara de admisión de un ventilador, a) Correcta; b) Incorrecta 59 MANTENIMIENTO INDUSTRIAL La forma del anillo de fijación de los álabes puede influir en el rendimiento, como muestra la Fig. 178. Sólo la forma (c) evita el desprendimiento de la corriente a la entrada, aunque las otras dos formas son de construcción más sencilla y económica. Fig. 178.- Formas diversas del anillo de fijación de los álabes, a) Plano; b) Cónico; c) Aerodinámico (En las formas (a) y (b) el desprendimiento de la corriente ocurre fácilmente). La lengua de la caja espiral puede ser larga, corta o no existir, como se indica en el esquema de la Fig. 179. Una lengua excesivamente corta es causa del aumento del ruido en los ventiladores, mientras que una lengua excesivamente larga provoca una disminución del rendimiento. Los ventiladores de alta presión son en esto más sensibles a la variación del rendimiento. Fig. 179.- Cámara espiral, 1 Sin lengua; 2 Con lengua poco pronunciada; 3 Con lengua pronunciada. 60 MANTENIMIENTO INDUSTRIAL En la Fig. 180 se presentan tres formas corrientes de la realización del difusor y en la Fig. 181 las diferentes posiciones que puede tomar la salida del ventilador. Fig. 180.- Colocación del difusor a la salida del ventilador, a) Correcta; b) Incorrecta; c) Difusor simétrico. Fig. 181.- Realizaciones diversas de la boca de salida del ventilador, a) A derechas; b) A izquierdas. CAUSAS DEL RUIDO EN VENTILADORES Los álabes de un ventilador crean a su alrededor un campo de presión que varía de un punto a otro del espacio, originándose unas ondas acústicas que interaccionan entre sí, propagándose por el aire, las paredes, el suelo, y en general por la estructura del edificio. Las causas son: - La frecuencia fundamental del sonido del ventilador es igual al producto de su velocidad de rotación por el nº de álabes del rodete - La intensidad del sonido producido directamente por los álabes es aproximadamente proporcional a la velocidad periférica de la punta de los álabes y a la quinta potencia del nº de revoluciones 61 MANTENIMIENTO INDUSTRIAL - Las intensidades de sonido de dos ventiladores geométricamente semejantes son directamente proporcionales a la séptima potencia de la relación de semejanza - La distancia excesivamente pequeña entre el borde de salida de los álabes del rodete y la lengua de la caja espiral es causa de ruido. - El número de los álabes directrices fijos no debe ser igual ni múltiplo del de los álabes móviles - La corona difusora sin álabes produce menos ruido que la corona de álabes directrices - Las vibraciones forzadas de la carcasa y de los conductos de admisión y escape pueden ser origen de ruidos de gran intensidad, sobre todo en condiciones de resonancia - El desequilibrio estático y dinámico del motor, y la mala alineación de los cojinetes - El motor de accionamiento y los cojinetes de bolas, a bajo nº de revoluciones, son causa de ruido, por lo que utilizando cojinetes deslizantes se puede eliminar la causa - Al disminuir el rendimiento del ventilador para un mismo nº de rpm aumenta la intensidad del ruido. CARACTERISTICAS Los ventiladores se clasifican, según la dirección del flujo en el rodete, en centrífugos, diagonales o semiaxiales y axiales. Dentro de cada grupo, el tipo de ventilador queda definido por el número especifico de revoluciones nq de la forma: Algunos de los puntos de vista más importantes a tener en cuenta en la elección de un ventilador son los siguientes: Rendimiento óptimo.- Para ello se debe escoger el ventilador según el número específico de revoluciones requerido. Mínimo nivel de ruido.- Para ello se debe escoger el ventilador con un coeficiente de presión ψ elevado y número de revoluciones bajo. 62 MANTENIMIENTO INDUSTRIAL Gran caudal.- Para ello se debe escoger un ventilador con coeficiente de caudal Φ elevado. Gran potencia específica (volumen y masa de máquina reducidos para la potencia deseada). Forma y dimensiones determinadas en la admisión y salida. Curvas características planas en todo el campo de trabajo del ventilador a fin de que el rendimiento se mantenga elevado. Potencia mínima absorbida a caudal nulo. Exigencias diversas en cuanto a la regulación. DESARROLLO La industria de los ventiladores, un tanto postergada años atrás, despierta en la actualidad gran interés por el creciente uso de estas máquinas en la ventilación de locales de trabajo y de recreo, minas, fábricas, túneles, barcos, etc. ..., así como en las múltiples aplicaciones de secado, refrigeración y acondicionamiento de aire. La construcción de los ventiladores se perfecciona cada vez más, así como las pruebas y ensayos para un mejor funcionamiento. Un método para investigar la corriente y el ruido en los ventiladores consiste en instalar imanes diminutos, que se instalan en álabes diametralmente opuestos y un transductor (fotocélula) cuyos impulsos se envían a un contador eléctrico. Corrosión y abrasión.- La corrosión que proviene solamente de la humedad, se puede controlar con pintura de buena pasta de asfalto u otra clase de pintura resistente a la corrosión. La corrosión que proviene de otros elementos, se debe tratar en cada caso particular. En la actualidad existen ventiladores de construcción total de plástico, generalmente polietileno o cloruro de polivinilo rígido. La construcción de ventiladores de materiales plásticos data ya de muy antiguo; en la industria química su empleo es hoy muy frecuente, para evitar la corrosión que fácilmente se produce en los ventiladores metálicos. Otras ventajas de los ventiladores de plástico son, marcha tranquila y reducción del peso hasta alcanzar sólo el 10% del peso de un ventilador de chapa; la superficie interior del ventilador de plástico es muy poco rugosa, y por tanto desde el punto de vista hidrodinámico muy favorable, por lo que es posible encontrar un ventilador que sea más o menos resistente a las sustancias químicas más comunes. 63 MANTENIMIENTO INDUSTRIAL Por lo general, los fabricantes no pueden garantizar la vida de un ventilador que maneje vapores corrosivos, puesto que el grado de corrosión depende de muchos factores, tales como, la temperatura, la concentración y la presencia de otras sustancias que provoquen la acción del elemento corrosivo. La fabricación de álabes de ventilador axiales de duroplástico exige una fuerte inversión en la fabricación de las matrices para las prensas, lo cual sólo se justifica en los ventiladores pequeños por el número de piezas en serie que se fabrican. En la construcción de ventiladores se emplea un gran número de materiales termoplásticos, entre ellos el polietileno, muy utilizado en construcción soldada. Se han desarrollado procesos de fabricación especiales, en los que las carcasas se conforman de placas de material plástico en dos mitades, que se unen entre sí con pernos también de plástico; el cubo y los álabes conforman una sola pieza; la llanta fabricada de la misma manera se suelda a los álabes. La abrasión rara vez constituye un problema serio en la ventilación. Existen diseños especiales de ventiladores, así como materiales disponibles, que proporcionan la mayoría de los fabricantes, para cuando la abrasión llegue a ser un factor importante. DISPOSITIVOS DE SEGURIDAD Los dispositivos de seguridad deben proteger al personal del contacto con elementos rotatorios y, al mismo tiempo, interferir al mínimo en el funcionamiento normal del equipo; asimismo, deben proteger el equipo contra daños accidentales. a) Protecciones metálicas Las protecciones metálicas se utilizan para cubrir la entrada o salida del ventilador centrífugo o axial, o para rodear completamente al ventilador, al motor y a la transmisión del ventilador de hélice. Estas protecciones metálicas (rejillas de malla o entrecalado fino), obstruyen la corriente de aire y reducen la capacidad del ventilador de manera considerable; si es posible, no se debe usar una malla plana de menos de 25 mm2; si se tiene que usar una malla fina, la protección metálica debe ser lo suficientemente grande como para que su área libre sea, por lo menos, igual al área de entrada o de salida, según el caso. b) Guardabandas. La transmisión por bandas en V es de fricción y, como tal, genera calor. El aire debe circular libremente por todas las partes de la transmisión, colaborando en la disipación de este calor, no siendo buena práctica el envolver completamente las transmisiones por bandas en V; si es posible conviene utilizar guardabandas de malla abierta. 64 MANTENIMIENTO INDUSTRIAL FALLAS EN VENTILADORES Un ventilador nunca debe operar a una velocidad más alta que aquella para la cual su fabricante lo diseñó. El rotor puede estar operando a su máxima velocidad de seguridad y puede fallar por los mayores esfuerzos que resultan de una velocidad más alta que puede estar cerca de la velocidad crítica de la flecha y causar una vibración excesiva; la fuerza motriz indicada para el ventilador puede aumentar lo suficiente como para sobrecargar y quemar la fuente motriz. El ventilador sigue unas leyes según las cuales el volumen de fluido desplazado es directamente proporcional al nº n de rpm, la presión desarrollada lo es al cuadrado de n y la potencia requerida al cubo de n. Los problemas más comunes de los ventiladores y sus posibles causas son: a) Capacidades y presión abajo de las nominales 1.- La resistencia total del sistema es más alta que la calculada. 2.- La velocidad es demasiado baja. 3.- Las compuertas y aspas radiales de entrada no ajustan adecuadamente. 4.- Condiciones insuficientes de entrada o salida. 5.- Filtraciones de aire en el sistema. 6.- Rotor dañado. 7.- Sentido incorrecto de rotación. 8.- Rotor montado al revés en la flecha. b) Vibraciones y ruido 1.- Mal alineamiento del rotor o transmisión por bandas en V. 2.- Base de cimentación inestable. 3.- Materiales extraños sobre el rotor que causan desequilibrio. 4.- Rotor o motor dañados. 5.- Pernos o tornillos fijos, rotos o sueltos. 6.- Flecha vencida. 7.- Rotor o motor desequilibrados. 8.- Zumbido magnético de 120 ciclos debido a la entrada de energía eléctrica 9.- El ventilador entrega más de la capacidad nominal. 10.- Compuertas o aletas radiales de entrada flojas. 11.- Velocidad demasiado alta o el ventilador gira en dirección errónea. 12.- Vibración transmitida al ventilador desde otro punto o fuente. c) Sobrecarga de la fuente motriz 1.- Velocidad demasiada alta. 2.- Descarga que sobrepasa la capacidad, debido a que la resistencia existente del sistema es más baja que la original nominal. 65 MANTENIMIENTO INDUSTRIAL 3.- Densidad del gas por encima del valor de diseño. 4.- Empaque demasiado apretado o defectuoso. 5.- Sentido de rotación erróneo. 6.- Flecha vencida. 7.- Mal alineamiento. 8.- El rotor pega o roza contra la envolvente. 9.- Bobinado del motor defectuoso. SISTEMAS DE VENTILACIÓN POR EXTRACCIÓN Un equipo de ventilación por extracción puede estar constituido con: a) Ventiladores de hélice b) Ventiladores axiales de tubo c) Ventiladores axiales de álabes-guía d) Ventiladores centrífugos incluyendo el equipo auxiliar serpentines para enfriamiento y calentamiento, compuertas, lumbreras, etc. La ventilación específica consiste en la captación de vapores, calor o polvos en su punto de origen. La ventilación general consiste en reemplazar el aire viciado de toda una planta por aire limpio y nuevo, a intervalos fijos. Ambos sistemas tienen aplicaciones que con frecuencia se realizan en la misma planta y al mismo tiempo. INSTALACIÓN DE LOS SISTEMAS DE EXTRACCIÓN.- El método más sencillo para extraer los vapores y el calor de un recinto es montar un ventiladorextractor en una ventana o en un muro; estos ventiladores están dotados de accesorios que les permiten cumplir con los códigos de seguridad necesarios por la planta y para dar cumplimiento a las disposiciones oficiales. Considerando el volumen de aire que se puede remover con ventiladores-extractores de este tipo, este método es el menos costoso y tiene el más bajo costo de mantenimiento, a la vez que es muy efectivo. Una extensión del sistema descrito es la instalación de ventiladores-extractores en lumbreras instaladas en el techo, por encima de la planta, siendo su tamaño y localización función del calor y de las condiciones de operación fabriles determinantes. La ventilación específica para la eliminación de vapores, polvos, etc., se efectúa mediante sistemas de conductos de evacuación de varios tipos, dependiendo de las circunstancias propias de cada caso en particular. Los sistemas específicos de extracción 66 MANTENIMIENTO INDUSTRIAL varían desde unidades de un solo ventilador y de una sola campana, hasta sistemas de conductos muy complejos. Ejemplos de extractores de una campana son, las casetas rociadoras, las casetas para la extracción de vapores y calores resultantes de las operaciones de soldar, las campanas de figones y las campanas de extracción en la soldadura de plomo o estaño. La presión estática exigida en conductos sencillos de extracción oscila entre 6 mm y 20 mm de columna de agua, aproximadamente. En sistemas complejos, donde hay muchas campanas y tanques interconectados y particularmente en sistemas de conductos donde se usan campanas de ranura, placas desviadoras, eliminadores de agua, etc., la presión estática llega hasta 100 mm de columna de agua; un ejemplo sería la conexión de 10 ó 12 tanques de electrólisis y tanques limpiadores a un único sistema de conductos asistido por un ventilador axial de álabes-guía; el cálculo de la caída de presión en sistemas complicados puede ser muy laborioso. La extracción de vapores por medio de un ventilador axial de álabes-guía, en un sistema de campana de ranura colocada encima de un tanque limpiador, es un método satisfactorio para tanques de 2 a 2,5 metros de ancho. A los que miden más de 2,5 metros de ancho se les coloca campana de ranura por ambos lados. Los conductos pueden ir montados en lo alto, aunque a veces, para ganar espacio de trabajo, en algunas plantas se colocan en el piso o debajo de él. En plantas más grandes, los requisitos del sistema, las especificaciones de los materiales y la selección del equipo ventilador, dependen de las presiones estáticas implicadas. VENTILADORES DE TECHO.- Los ventiladores de techo, en la ventilación general de una planta, son de dos tipos: a) Ventiladores motorizados y b) Ventiladores que funcionan por gravedad. Los ventiladores de techo que funcionan por gravedad dependen de la velocidad del viento que sople sobre ellos, así como de su altura sobre el nivel del suelo y de la diferencia de temperaturas entre el suelo y el techo; estos ventiladores funcionan muy bien en donde se experimenta un calor fuerte y en donde el viento sopla a gran velocidad, pero se hallan sujetos a las condiciones externas climatológicas, sobre las que el operador no tiene ningún control. Los ventiladores de techo motorizados, aunque por lo general se emplean para propósitos de extracción, también se construyen en la actualidad para sistemas de admisión del aire y se controlan sin tener en cuenta las condiciones externas climatológicas. 67 MANTENIMIENTO INDUSTRIAL Para las plantas industriales se proporcionan ventiladores tipo hélice, o del tipo axial en tubo, debido a sus altas velocidades de descarga o de movimiento del aire; algunos fabricantes de equipos pueden efectuar adaptaciones especiales, empleando ventiladores reversibles para hacer entrar o salir el aire a la planta, a través de lumbreras y en ciertas épocas del año. REQUISITOS PARA LA EXTRACCIÓN DE AIRE.- En toda instalación de ventilación se pueden seguir algunas normas generales, como: - Siempre que sea posible, los ventiladores deben colocarse de forma que la descarga siga la dirección del viento que prevalezca; si es posible, los lugares para la admisión de aire deben colocarse de forma que se saque ventaja de las presiones positivas creadas por los vientos prevalecientes; en esta situación los ventiladores extractores se deben colocar de forma que no haya interferencias de aberturas que den directamente al ventilador. - En monitores de techo, los ventiladores se instalan de forma que descarguen con las ventanas contiguas abiertas, hecho que no es beneficioso ni para el personal ni para las condiciones existentes en el edificio y que, únicamente, permite que el aire sea succionado a través de las ventanas abiertas del lugar y sea descargado por el ventilador. - El área de succión debe ser, por lo menos, un 50% mayor que el área de descarga del rotor del ventilador y aun mayor si fuere posible; debe colocarse de forma que las corrientes de aire no sean molestas para los trabajadores que se encuentren cerca de ellas. Si en la succión se emplean filtros, éstos deben arreglarse hasta donde sea práctico para mantener al mínimo la pérdida de presión debida a la resistencia que éstos presentan. - La resistencia estática va desde 50 mm en filtros limpios, hasta 100 mm en filtros sucios. - A menudo es necesario dotar a los ventiladores de tubos externos de refrigeración sobre los motores, debido a la existencia de altas temperaturas ambientales, o usar motores provistos de aislamientos que permitan que resista las condiciones de calor del lugar en donde vaya ubicado el ventilador. - En aquellas ocasiones en que el aire es peligroso, debido a vapores gaseosos o a la concentración de polvos, la construcción del rotor del ventilador tiene que ser a prueba de chispas. - En atmósferas corrosivas o húmedas, los vapores se captan por ventilación específica y se utilizan motores resistentes a los ácidos, así como revestimientos y materiales especiales que deben emplearse en los sistemas de ventilación. 68 MANTENIMIENTO INDUSTRIAL Velocidades recomendadas para las campanas de extracción.- Las velocidades requeridas por el aire están en un rango muy amplio. Algunos de los procedimientos a tener en cuenta para la colocación de campanas de extracción, de ranura o del tipo de caseta, se rigen por el sentido común; es evidente que los vapores y el calor deben captarse lo más cerca posible de la fuente que los produce; también es bueno distribuir los conductos en forma directa y de corta longitud tanto como sea posible. Otra regla práctica es mantener la velocidad del aire en el conducto lo más baja posible, teniendo en cuenta la clase de vapores que se vayan a manejar y el recorrido en el conducto; esto no se puede hacer en el transporte de materiales, pues por lo que se refiere a la velocidad, existen requisitos definidos para cada tipo de material. En todo sistema de conductos complejos es bueno emplear codos flexibles o veletas interiores para mantener al máximo la resistencia que presentan los codos. Una vez calculada la resistencia del sistema de extracción, es conveniente sugerir el uso de un ventilador que tenga una reserva de capacidad de un 10% a un 15% más allá del punto (volumen-presión) seleccionado. En un sistema específico de ventilación, el área de la campana, la altura a la que se coloca ésta y el espacio sobrante que la cubre, deben ser suficientes para que se mantenga la efectividad de las condiciones de trabajo y se logre una eficaz captación de lo que se trata de extraer. Esto se aplica también a los sistemas de ventilación de tanques, de campanas tipo ranura y de otras instalaciones específicas de campanas. Si se encuentran vapores corrosivos, condiciones de abrasión, o altas temperaturas, hay que asegurarse de que las partes del conducto y del ventilador tengan tratamiento adecuado, para asegurar su larga duración. Los sistemas de extracción funcionan bien durante el verano, o cuando las ventanas de la fábrica están abiertas. Sin embargo, una cosa diferente sucede, cuando las ventanas y puertas se cierran durante el invierno, ya que en las operaciones de extracción, como con frecuencia sucede, hay carencia de aire, por lo que la presión estática se acumula y la eficiencia de las unidades disminuye. Un sistema de extracción que no tenga abastecimiento de aire es muy ineficaz. Existen condiciones particularmente malas en las plantas de limpieza, donde el polvo constituye un problema, en las fábricas de papel, salas de electrólisis, etc. en lo que respecta a la condensación en muros y paredes, en ventanas, en techos, etc. Es difícil determinar el volumen de aire de repuesto que se necesita en aplicaciones particulares. En la mayoría de los casos, el abastecer un 75% del volumen de aire por minuto que se expele es suficiente; el 25% restante que necesitan los ventiladores puede venir de la infiltración del aire, o aún puede ser posible que se baje en un 5% a un 10% la capacidad normal, puesto que en invierno no se necesita refrescar el aire. 69 MANTENIMIENTO INDUSTRIAL En otros casos, como el abastecimiento de aire en las casetas secadoras de pinturas, donde el principal objeto de los ventiladores es la extracción de los vapores explosivos o peligrosos, la entrada de aire debe mantenerse a un mínimo de 75 a 80% de lo que necesitan los ventiladores extractivos; si las unidades de entrada proporcionan más aire del que los extractores pueden remover, las emanaciones dentro de las estancias que estén siendo ventiladas se esparcirán por todo el edificio. En lugares en donde se alojan transformadores, aparatos interruptores y de control de fuerza eléctrica, o en lugares en donde se encuentran dispositivos que están expuestos a deterioro por la acción del polvo o de materiales abrasivos suspendidos en el aire, es necesario filtrar el aire de entrada y admitir un exceso respecto del que se extrae por medio de los extractores, lo que mantiene el lugar a una presión positiva y permite que el aire salga por rendijas y otras aberturas hacia afuera y se evite que entren el polvo y la suciedad. Existen varios tipos de sistemas de entrada de vapor, que en su mayoría están dotados de serpentines de no congelación, serpentines de unidades calefactoras con fluses extra para condensados fuera del tubo suministrador de vapor, de tal forma que los condensados estén calientes continuamente. En el sistema deben instalarse dispositivos de control para parar el ventilador y para cerrar las compuertas de entrada cuando falle la presión del vapor o cuando los controles señalen flujo cero. Los serpentines se pueden dotar de ventiladores tipo hélice o axiales de álabes-guía, o centrífugos, y pueden equiparse con filtros de aire a la entrada o con difusores de aire, o con conductos para entubar el aire entrante y llevarlo a varias partes del edificio. En muchos casos es necesario emplear cabezales difusores o conductos para desviar el aire entrante hasta partes donde el aire caliente no esté en contacto directo con las personas; un ejemplo es el de las fábricas de papel, en las que el aire entrante se ha calentado, ya que se ha conducido por conductos por debajo de la máquina productora de papel, permitiendo que absorba el calor disipado por la máquina, siendo eliminado después. Algunas instalaciones se colocan cerca del techo y fuerzan el aire hacia abajo, hasta el nivel del suelo, siendo necesario evitar que el aire incida directamente sobre las personas, método particularmente ventajoso en edificios demasiado amplios, en los que la provisión de aire se necesita cerca del centro. En instalaciones de este tipo, hay que tener cuidado en el entubamiento para asegurarse de su hermeticidad, siendo necesario instalar un bulbo termostático de control a considerable distancia más allá del serpentín, o escudarlo del calor radiante, para que así funcione adecuadamente; si el bulbo del termostato está sin protección o se instala muy cerca de la fuente de calor, puede hacer parar a la unidad, causando la congelación del núcleo y originando un fallo; deben seguirse rigurosamente las recomendaciones del fabricante en lo relativo a las válvulas de control; una válvula demasiado grande puede originar frecuentes aperturas y cierres 70 MANTENIMIENTO INDUSTRIAL de la válvula, siendo causa de fallos prematuros; una válvula demasiado pequeña puede originar insuficiente calor o la congelación del núcleo. Existen unidades que se pueden emplear tanto para el suministro, como para la extracción de aire, dependiendo de la estación del año y de la naturaleza del trabajo que se haga. Buenos ejemplos del suministro de aire no calentado son las grandes plantas generadores de energía eléctrica, en las que el aire se introduce en los distintos niveles a través de los muros de la planta, haciéndolo fluir sin lumbreras, difusores o conductos, estando colocados los extractores a niveles altos, junto con los ventiladores soplantes de la caldera de tiro inducido, tomando este aire y descargándolo fuera del edificio. A veces es necesario aumentar la ventilación general en fraguas, laminadoras, fundiciones, fábricas de vidrio, etc. mediante sistemas de presión que suministran pequeñas corrientes de aire fresco del exterior, en determinadas operaciones y para ciertos operadores. EXTRACCIÓN DE GASES Y VAPORES CORROSIVOS.- El problema de la extracción de gases y vapores corrosivos es serio desde el punto de vista del mantenimiento, porque el equipo de ventiladores está sujeto a la corrosión. Ningún metal en particular puede soportar todos los ácidos, gases y vapores corrosivos, durante un periodo razonable. Algunos de los factores que afectan el deterioro de los metales, son: - El tipo de ácido o de álcali presentes - La temperatura de los gases o vapores - La concentración y la localización. Algunos metales que se usan para los gases y vapores corrosivos son el acero inoxidable, el metal monel, el bronce, el hierro fundido, el níquel y las aleaciones especiales. Debe especificarse la aleación adecuada para combatir gases o vapores particulares, ya que por ejemplo, no todos los aceros inoxidables son resistentes en el mismo grado. Otros materiales que se usan en los ventiladores contra condiciones ácidas o alcalinas son: - Las resinas fenólicas con base de lona son excelentes por su resistencia a muchos ácidos y al agua salada, pero son pobres contra concentraciones de cáusticos. - El cloruro de polivinilo rígido se usaba para los conductos y las envolventes de ventiladores, conductos y campanas, aunque en forma limitada; es prácticamente inerte a la mayoría de los ácidos y álcalis industriales, pero gran parte de los tipos de este material son propensos a reblandecerse al aumentar la temperatura por encima de los 71 MANTENIMIENTO INDUSTRIAL 80ºC; el material se puede soldar con una varilla de soldadura del mismo material, y se debe conformar bajo la acción del calor. - Telas y felpas de vidrio reforzadas con poliéster, se han usado en los conductos. La teja vitrificada a prueba de ácidos se usa con frecuencia para los conductos de forma cuadrada, particularmente para los conductos subterráneos. Esta tela también se aplica en forma redondeada para algunos conductos que tienen que resistir condiciones extremas de corrosión. Existen muchos revestimientos especiales para los equipos que manejan aire, así como para los conductos y estructuras que los soportan. Estos materiales comprenden desde las pinturas negras de asfalto para chimeneas, hasta las resinas de composición complicada y de alto precio, así como el hule natural y los revestimientos de neopreno, fenoles modificados, revestimientos de resinas epoxy y plastisoles hechos de cloruro de polivinilo; se han usado con éxito otros revestimientos de vinilo y algunos de poliésteres. Es fácil proteger las envolventes de los ventiladores y los conductos, ya que en ellas existe poca abrasión, excepto en las esquinas y en los puntos de entrada; las partes rotativas de los ventiladores experimentan fuertes abrasiones y erosiones, a causa de las pequeñas gotas de agua. Los revestimientos más suaves resisten el efecto abrasivo de las pequeñas gotas de agua y de las partículas sucias mejor que los revestimientos más duros. Cuando se usa un revestimiento duro, el primer efecto es que la gotita de agua materialmente se estrella contra el revestimiento y, entonces, el ácido o el álcali se introducen por debajo del revestimiento, atacando el metal base; con los revestimientos más suaves, la partícula de agua mella el revestimiento pero resbala sobre él; es importante que los tornillos, los pernos y las flechas estén revestidos o hechos de un metal que resista la corrosión. Cualquier metal especial que se use en ventiladores y conductos, así como muchos de los plásticos, son costosos, pero en la mayoría de sus aplicaciones, en condiciones corrosivas graves, la duración extra del equipo y de los conductos, y una operación libre de problemas, compensa el costo inicial. Es prácticamente imposible predecir la duración del equipo sujeto a condiciones de corrosión, ya que las temperaturas y los grados de concentración desempeñan un papel muy importante. Cuando se use un sistema de tuberías, el ventilador se sitúa tan lejos de la fuente de los gases y vapores como sea posible, y se toma la precaución de purgar periódicamente el sistema de conductos; si es posible, se debe instalar un eliminador de agua, a prueba de corrosión, entre el ventilador y la fuente de gases y vapores. 72 MANTENIMIENTO INDUSTRIAL EXTRACCIÓN DE GASES INFLAMABLES O EXPLOSIVOS.- La eliminación de gases explosivos o inflamables requiere de un equipo especial, necesitándose motores eléctricos a prueba de chispas y explosiones que lleven expresamente una placa que lo garantice. Los motores a prueba de explosiones se pueden usar en las siguientes situaciones: - Casos en que figuren la gasolina y petróleo, gases, plantas de lavanderías y tintorerías, fábricas de pinturas y barnices, plantas gasificadoras y plantas químicas, donde el gas de que se trate no sea más peligroso que la gasolina y que el vapor de los solventes de las lacas - Motores que se utilizan en condiciones peligrosas para polvos de granos y polvos de carbón - Motores, menos conocidos, son para acetileno, hidrógeno, éter, etc. Los motores a prueba de chispas se utilizan en condiciones peligrosas para evitar la posible explosión que se puede producir al frotar dos metales ferrosos o al golpearse uno contra el otro; materiales que no producen chispas y que pueden usarse en los rotores, son el aluminio, el cobre, el latón y el monel. Los ventiladores centrífugos usualmente están equipados con placas de frotamiento que no producen chispas y con rotores de aluminio o de latón. Los equipos ventiladores se deben colocar tan cerca de la fuente de los gases o de los materiales explosivos como sea posible, para evitar que se esparzan por toda la planta; hay que tener cuidado de asegurarse de que los condensados de los gases se purguen de los conductos, utilizando frecuentemente compuertas con listones fusibles para cerrar o abrir el sistema en caso de incendio. TORRES DE REFRIGERACIÓN E INTERCAMBIADORES DE CALOR Para el enfriamiento del agua en las torres de refrigeración y en los intercambiadores de calor se emplean ventiladores grandes; generalmente son del tipo hélice y mueven grandes volúmenes de aire a bajas presiones estáticas. En las torres de refrigeración más pequeñas, los ventiladores para el acondicionamiento del aire tienen diámetros entre 70 cm hasta 4 metros y son frecuentemente de aluminio o de acero inoxidable, monel, plástico, aluminio, madera y otros materiales. El mantenimiento de una torre de refrigeración es extremo, ya que tiene que estar operativa durante las 24 horas del día; el vapor de agua sobre las aspas y causa erosión y corrosión. 73 MANTENIMIENTO INDUSTRIAL 6.3.4. Compresores Los compresores son máquinas que tienen por finalidad aportar una energía a los fluidos compresibles (gases y vapores) sobre los que operan, para hacerlos fluir aumentando al mismo tiempo su presión. En esta última característica precisamente, se distinguen de las soplantes y ventiladores que manejan grandes cantidades de fluidos compresibles (aire por ejemplo) sin modificar sensiblemente su presión, con funciones similares a las bombas de fluidos incompresibles. Un compresor admite gas o vapor a una presión p1 dada, descargándolo a una presión p2 superior, Fig. 182. La energía necesaria para efectuar este trabajo la proporciona un motor eléctrico o una turbina de vapor. Fig. 182.- Esquema del funcionamiento de un compresor alternativo, y partes de un compresor hermético 74 MANTENIMIENTO INDUSTRIAL Los compresores se emplean para aumentar la presión de una gran variedad de gases y vapores para un gran número de aplicaciones. Un caso común es el compresor de aire, que suministra aire a elevada presión para transporte, pintura a pistola, inflamiento de neumáticos, limpieza, herramientas neumáticas y perforadoras. Otro es el compresor de refrigeración, empleado para comprimir el gas del vaporizador. Otras aplicaciones abarcan procesos químicos, conducción de gases, turbinas de gas y construcción. Los elementos principales de esta estructura son: motor, cuerpo, tapas, enfriador y árboles. El cuerpo y las tapas del compresor se enfrían por el agua. Los elementos constructivos tienen ciertas particularidades. Para disminuir las pérdidas de energía de la fricción mecánica de los extremos de las placas contra el cuerpo en este se colocan dos anillos de descarga que giran libremente en el cuerpo. A la superficie exterior de estos se envía lubricación. Al girar el motor los extremos de las placas se apoyan en el anillo de descarga y se deslizan parcialmente por la superficie interior de estos; los anillos de descarga giran simultáneamente en el cuerpo. Al fin de disminuir las fuerzas de fricción en las ranuras las placas se colocan no radicalmente sino desviándolas hacia adelante en dirección de la rotación. El ángulo de desviación constituye 7 a 10 grados. En este caso la dirección de la fuerza que actúa sobre las placas por lado del cuerpo y los anillos de descarga se aproxima a la dirección de desplazamiento de la placa en la ranura y la fuerza de fricción disminuye. Para disminuir las fugas de gas a través de los huelgos axiales, en el buje del motor se colocan anillos de empacaduras apretados con resortes contra las superficies de las tapas. Por el lado de salida del árbol a través de la tapa, se ha colocado una junta de prensaestopas con dispositivos tensor de resortes. TIPOS DE COMPRESORES Según las exigencias referentes a la presión de trabajo y al caudal de suministro, se pueden emplear diversos tipos de construcción. Al clasificarse según el indicio constructivo los compresores volumétricos se subdividen en los de émbolo y de motor y los de paletas en centrífugos y axiales. Es posible la división de los compresores en grupos de acuerdo con el género de gas que se desplaza, del tipo de transmisión y de la destinación del compresor. Estos al igual que las bombas mencionadas anteriormente pueden clasificarse en dos grupos: 1. Compresores de desplazamiento positivo 2. Compresores de desplazamiento no positivo 75 MANTENIMIENTO INDUSTRIAL El primero trabaja según el principio de desplazamiento. La compresión se obtiene por la admisión del aire en un recinto hermético, donde se reduce luego el volumen. Se utiliza en el compresor de émbolo (oscilante o rotativo). El otro trabaja según el principio de la dinámica de los fluidos. El aire es aspirado por un lado y comprimido como consecuencia de la aceleración de la masa (turbina). 76 MANTENIMIENTO INDUSTRIAL DESCRIPCIÓN DE COMPRESORES DE DESPLAZAMIENTO POSITIVO COMPRESORES ALTERNATIVOS O DE EMBOLO El compresor de embolo, de vaivén o de movimiento alternativo, es una maquina de desplazamiento positivo que aumenta la presión de un volumen determinado de gas mediante la reducción de su volumen inicial. La compresión se verifica por el movimiento de vaivén de un embolo encerrado en un cilindro. Generalmente, el cilindro es de dobla efecto y esta accionado por un mecanismo de biela y manivela. La compresión tiene lugar en ambos extremos del cilindro, el cual suele llevar una camisa de agua para disparar el calor engendrado por la fricción de los anillos del embolo y por la empaquetadura del vástago y parte del calor de compresión. La salida del vástago en el cilindro se cierra con una empaquetadura sin escapes. Se regula la oportuna salida y entrada del gas en el cilindro mediante válvulas que se abren según cambia la presión diferencial entre el interior del cilindro y el sistema gaseoso. El proceso de compresión puede verificarse en una sola etapa termodinámica (compresión de una fase) o dividirse en varias etapas con enfriamiento intermedio del gas (compresión de varias etapas o multigradual). La compresión multigradual requiere una maquina más costosa que la compresión unifase, pero se utiliza con más frecuencia por varias razones: menor consumo de energía, menor elevación de temperatura del gas dentro del cilindro y menor diámetro del cilindro. Los compresores que se utilizan más comúnmente para comprimir gases tienen una cruceta a la que se conectan la biela y la varilla del pistón. Esto proporciona un movimiento en línea recta para la varilla del pistón y permite que se utilice un embalaje simple, en la figura 183 se muestra una maquina sencilla, de etapa simple, con un pistón de acción doble. Se pueden utilizar pistones de acción simple o doble, dependiendo del tamaño de la maquina y el numero de etapas. En alguna maquinas, se usan pistones de acción doble, en la primera etapa y de acción simple, en las posteriores. En las maquinas de etapas múltiples, hay enfriadores intermedios entre capa una de estas. Esos intercambiadores de calor eliminan el calor de la compresión del gas y reducen su temperatura a aproximadamente la que existe a la entrada del compresor. Ese enfriamiento reduce el volumen de gas que va a los cilindros a alta presión, hace disminuir la energía necesaria para la compresión y, a presiones elevadas, mantiene la temperatura dentro de límites de operación seguros. En la figura 184 se muestra un extremo del compresor de dos etapas Los compresores con cilindro horizontales (Fig. 184) son los que más se utilizan, por su capacidad de acceso. Sin embargo, se construyen también maquinas con cilindros verticales y otras disposiciones, tales como las de ángulo recto (uno horizontal y el otro vertical) y en ángulo en V. Los compresores alternativos, pueden ser del tipo lubricado o sin lubricar. 77 MANTENIMIENTO INDUSTRIAL Fig. 183 Fig. 184 Lubricación de compresores Para la lubricación de los compresores de émbolo se emplean los mismos métodos que para las máquinas de vapor, salvo las altas exigencias de los aceites de engrase a causa del gran calor radiado por los cilindros de vapor. Para el engrase de los cilindros, como para las máquinas de vapor, se emplean bombas de émbolo buzo de funcionamiento obligado por la transmisión. Aún con altas presiones de gas deben procurarse aceites de poca viscosidad. Un aceite viscoso exige una potencia innecesariamente grande y hace que las válvulas tengan más tendencia a pegarse y romperse. Para muy altas presiones, se emplean, sin embargo, algunas veces los aceites viscosos para mejora la hermeticidad, aunque la temperatura del gas sea más baja. A ser posible se utilizara el aceite para el engrase del cilindro y de la transmisión, pues ello facilita la recuperación y nuevo empleo del aceite. Tipos de compresores Alternativos o de Émbolo Compresor de émbolo oscilante Este es el tipo de compresor más difundido actualmente. Es apropiado para comprimir a baja, media o alta presión. Para obtener el aire a presiones elevadas, es necesario disponer varias etapas compresoras. El aire aspirado se somete a una compresión previa por el primer émbolo, seguidamente se refrigera, para luego ser comprimido por el siguiente émbolo. El volumen de la segunda cámara de compresión es, en conformidad con la relación, más pequeño. Durante el trabajo de compresión se forma una cantidad de calor, que tiene que ser evacuada por el sistema refrigeración. 78 MANTENIMIENTO INDUSTRIAL Compresor de membrana Una membrana separa el émbolo de la cámara de trabajo; el aire no entra en contacto con las piezas móviles. Por tanto, en todo caso, el aire comprimido estará exento de aceite. Estos, compresores se emplean con preferencia en las industrias alimenticias farmacéuticas y químicas. Compresor de émbolo rotativo Consiste en un émbolo que está animado de un movimiento rotatorio. El aire es comprimido por la continua reducción del volumen en un recinto hermético. COMPRESORES ROTATORIOS Se denominan compresores rotatorios a aquellos grupos que producen aire comprimido por un sistema rotatorio y continuo, es decir, que empujan el aire desde la aspiración hacia la salida, comprimiéndolo. Se distinguen los siguientes tipos: Compresores de tornillo Esencialmente se componen de un par de motores que tienen lóbulos helicoidales de engrane constante. La compresión por motores paralelos puede producirse también en el sentido axial con el uso de lóbulos en espira a la manera de un tornillo sin fin. Acoplando dos motores de este tipo, uno convexo y otro cóncavo, y haciéndolos girar en sentidos opuestos se logra desplazar el gas, paralelamente a los dos ejes, entre los lóbulos y la carcasa. Las revoluciones sucesivas de los lóbulos reducen progresivamente el volumen de gas atrapado y por consiguiente su presión, el gas así comprimido es forzado axialmente por la rotación de los lóbulos helicoidales hasta 1ª descarga. Compresores de paletas deslizantes El motor es excéntrico en relación a la carcasa o el cilindro, y lleva una serie de aletas que se ajustan contra las paredes de la carcasa debido a la fuerza centrífuga. Este tipo de compresores consiste básicamente de una cavidad cilíndrica dentro de la cual está ubicado en forma excéntrica un motor con ranuras profundas, unas paletas rectangulares se deslizan libremente dentro de las ranuras de forma que al girar el motor la fuerza centrifuga empuja las paletas contra la pared del cilindro. El gas al 79 MANTENIMIENTO INDUSTRIAL entrar, es atrapado en los espacios que forman las paletas y la pared de la cavidad cilíndrica es comprimida al disminuir el volumen de estos espacios durante la rotación. Compresores soplantes Se conocen como compresores de doble motor o de doble impulsor aquellos que trabajan con dos motores acoplados, montados sobre ejes paralelos, para una misma etapa de compresión. Una máquina de este tipo muy difundida es el compresor de lóbulos mayor conocida como "Roots", de gran ampliación como alimentador de los motores diesel o compresores de gases a presión moderada. Los motores, por lo general, de dos o tres lóbulos están conectados mediante engranajes exteriores. El gas que entra al soplador queda atrapado entre los lóbulos y la carcasa; con el movimiento de los motores de la máquina, por donde sale, no pudieron regresarse debido al estrecho juego existente entre los lóbulos que se desplazan por el lado interno. DESCRIPCIÓN DE COMPRESORES DE DESPLAZAMIENTO NO POSITIVO COMPRESORES CENTRÍFUGOS El principio de funcionamiento de un compresor centrífugo (Fig. 185) es el mismo que el de una bomba centrífuga, su diferencial principal es que el aire o el gas manejado en un compresor es compresible, mientras que los líquidos con los que trabaja una bomba, son prácticamente incompresibles. Los compresores centrífugos pueden desarrollar una presión en su interior, que depende de la naturaleza y las condiciones del gas que manejan y es virtualmente independiente de la carga del procesamiento. Las condiciones que es preciso tomar en cuenta son: 1. La presión barométrica más baja 2. La presión de admisión más baja 3. La temperatura máxima de admisión 4. La razón más alta de calores específicos 5. La menor densidad relativa 6. El volumen máximo de admisión 7. La presión máxima de descarga 80 MANTENIMIENTO INDUSTRIAL Fig. 185 La mayoría de los compresores centrífugos funcionan a velocidades de 3.500 RPM (revoluciones por minuto) o superiores y uno de los factores limitantes es el de la fatiga del impulsor. Los impulsores de los compresores centrífugos son por lo común motores eléctricos o turbinas de vapor o gas, con o sin engranajes de aumento de velocidad. En un compresor, como en una bomba centrífuga, la carga es independiente del fluido que se maneje. Los compresores centrífugos constan esencialmente de: caja, volutas, rodetes impulsores, un eje y un sistema de lubricación. Las volutas convierten la energía cinética del gas desarrollada por los impulsores en energía potencial o presión. La caja es la cubierta en que van ajustadas las volutas y está proyectada para la presión a la que se ha de comprimir el gas. La caja se construye adaptándola a la aplicación particular y puede ser de hierro colado, acero estructural o fundición de acero. La compresión de un gas en un compresor centrífugo requiere con frecuencia un medio de ocluir el gas para evitar su fuga a la atmósfera o su contaminación. Existen varios tipos de oclusores: 1. el de cierre mecánico con anillo de carbón 2. el gas inerte 3. el directo de aceite en el cojinete del compresor y los de gasto de aceite Todos están diseñados principalmente como cierre de funcionamiento y no de paro. 81 MANTENIMIENTO INDUSTRIAL Los compresores centrífugos se utilizan para una gran variedad de servicios, incluyendo 1. 2. 3. 4. 5. 6. 7. enfriamiento y desecación, suministro de aire de combustión a hornos y calderas, sopladores de altos hornos, cúpulas y convertidores, transporte de materiales sólidos, procesos de flotación, por agitación y aireación, por ventilación, como eliminadores y para comprimir gases o vapor Compresor Axial El compresor axial se desarrollo para utilizarse con turbinas de gas y posee diversas ventajas para servicios en motores de reacción de la aviación. Su aceptación por la industria para instalaciones estacionarias fue lenta; pero se construyeron varias unidades de gran capacidad para altos hornos, elevadores de la presión de gas y servicios en túneles aerodinámicos. En los compresores de este tipo (Fig. 186), la corriente de aire fluye en dirección axial, a través de una serie de paletas giratorias de un motor y de los fijos de un estator, que están concéntricos respecto al eje de rotación. A diferencia de la turbina, que también emplea las paletas de un motor y los de un estator, el recorrido de la corriente de un compresor axial va disminuyendo de área de su sección transversal, en la dirección de la corriente en proporción a la reducción de volumen del aire según progresa la compresión de escalón a escalón. Fig. 186 Una vez suministrado el aire al compresor por el conducto de admisión, pasa la corriente a través de un juego de paletas directores de entrara, que preparan la corriente para el primer escalón de del compresor. Al entrar en el grupo de paletas giratorios, la corriente de aire, que tiene una dirección general axial se defecta en la dirección de la rotación. Este cambio de dirección de la corriente viene acompañado de una disminución de la velocidad, con la consiguiente elevación de presión por efecto de 82 MANTENIMIENTO INDUSTRIAL difusión. Al pasar la corriente a través del otro grupo de paletas del estator se lo para y endereza, después de lo cual es recogida por el escalón siguiente de paletas rotatorios, donde continúa el proceso de presurización. Un compresor axial simple puede estar constituido teóricamente por varias etapas según sea necesario, pero esto puede producir que a determinadas velocidades las últimas etapas funcionen con bajo rendimiento y las primeras etapas trabajen sobrecargadas. Esto puede ser corregido ya sea con extracción de aire entre etapas o se puede conseguir mucha mayor flexibilidad y rendimiento partiendo el compresor en dos sistemas rotatorios completamente independientes mecánicamente, cada uno arrastrado por su propia turbina. El compresor de alta tiene paletas más cortos que el de baja y es más ligero de peso. Puesto que el trabajo de compresión de compresor de alta trabaja a mayor temperatura que el de baja se podrán conseguir velocidades más altas antes de que las puntas de las paletas alcancen su número de Mach límite, ya que la velocidad del sonido aumento a mayor temperatura. Por consiguiente el compresor de alta podrá rodar a mayor velocidad que el de baja. El aire al salir del compresor pasa a través de un difusor que lo prepara para entrar a la cámara de combustión. VENTAJAS Y DESVENTAJAS DE LOS COMPRESORES Compresores Alternativos El uso de lubricantes en los compresores alternativos el causante de sus principales ventajas y desventajas. Un compresor lubricado durara más que uno que no lo está. Hay que tener cuidado de no lubricar en exceso, porque la carbonización del aceite en las válvulas puede ocasionar adherencias y sobrecalentamiento. Además, los tubos de descarga saturados con aceite son un riesgo potencial de incendio, por lo que se debe colocar corriente abajo un separador para eliminar el aceite. Los problemas más grandes en los compresores con cilindro lubricado son la suciedad y la humedad, pues destruyen la película de aceite dentro del cilindro. En los compresores sin lubricación la suciedad suele ser el problema más serio, y hay otros problemas que puede ocasionar el gas en sí. Por ejemplo, un gas absolutamente seco puede ocasionar un severo desgaste de los anillos. Compresores Rotatorios El diseño de anillo de agua tiene la ventaja de que el gas no hace contacto con las partes rotatorias metálicas. Los aspectos críticos son la presión de vapor del gas de 83 MANTENIMIENTO INDUSTRIAL entrada, comparada con la presión de vapor del líquido que forma el anillo de agua y el aumento de temperatura en el mismo. La presión de vapor del fluido para sellos debe ser muy inferior al punto de ebullición, porque de otra forma se evaporara el anillo de agua, ocasionara pérdida de capacidad y quizás serios daños por sobrecalentamiento. Compresores Centrífugos Ventajas: 1. En el intervalo de 2.000 a 200.000 ft3/min., y según sea la relación de presión, este compresor es económico porque se puede instalar en una sola unidad. 2. Ofrece una variación bastante amplia en el flujo con un cambio pequeño en la carga. 3. La ausencia de piezas rozantes en la corriente de compresión permite trabajar un largo tiempo entre intervalos de mantenimiento, siempre y cuando los sistemas auxiliares de aceites lubricantes y aceites de sellos estén correctos. 4. Se pueden obtener grandes volúmenes en un lugar de tamaño pequeño. Esto puede ser una ventaja cuando el terreno es muy costoso. 5. Su característica es un flujo suave y libre de pulsaciones. Desventajas: 1. Los compresores centrífugos son sensibles al peso molecular del gas que se comprime. Los cambios imprevistos en el peso molecular pueden hacer que las presiones de descarga sean muy altas o muy bajas. 2. Se necesitan velocidades muy altas en las puntas para producir la presión. Con la tendencia a reducir el tamaño y a aumentar el flujo, hay que tener mucho más cuidado al balancear los motores y con los materiales empleados en componentes sometidos a grandes esfuerzos. 3. Un aumento pequeño en la caída de presión en el sistema de proceso puede ocasionar reducciones muy grandes en el volumen del compresor. 4. Se requiere un complicado sistema para aceite lubricante y aceite para sellos. Compresores Axiales La alta eficiencia y la capacidad más elevada son las únicas ventajas importantes que tienen los compresores de flujo axial sobre las maquinas centrífugas, para las instalaciones estacionarias. Su tamaño y su peso menores no tienen mucha valor, tomando en cuenta, sobre todo, el hecho de que los precios son comparables a los de las maquinas centrífugas diseñadas para las mismas condiciones. Las desventajas incluyen una gama operacional limitada, mayor vulnerabilidad a la corrosión y la erosión y propensión a las deposiciones. 84 MANTENIMIENTO INDUSTRIAL 6.3.5. Turbinas Turbina es el nombre genérico que se da a la mayoría de las turbomáquinas motoras. Éstas son máquinas de fluido, a través de las cuales pasa un fluido en forma continua y este le entrega su energía a través de un rodete con paletas o álabes. Es un motor rotativo que convierte en energía mecánica la energía de una corriente de agua, vapor de agua o gas. El elemento básico de la turbina es la rueda o rotor, que cuenta con palas, hélices, cuchillas o cubos colocados alrededor de su circunferencia, de tal forma que el fluido en movimiento produce una fuerza tangencial que impulsa la rueda y la hace girar. Esta energía mecánica se transfiere a través de un eje para proporcionar el movimiento de una máquina, un compresor, un generador eléctrico o una hélice. Las turbinas constan de una o dos ruedas con paletas, denominadas rotor y estator, siendo la primera la que, impulsada por el fluido, arrastra el eje en el que se obtiene el movimiento de rotación. FIGURA 187 85 MANTENIMIENTO INDUSTRIAL El término turbina suele aplicarse también, por ser el componente principal, al conjunto de varias turbinas conectadas a un generador para la obtención de energía eléctrica. Las turbinas se clasifican en turbinas hidráulicas o de agua, turbinas de vapor y turbinas de combustión. Hoy la mayor parte de la energía eléctrica mundial se produce utilizando generadores movidos por turbinas. Los molinos de viento que producen energía eléctrica se llaman turbinas de viento. Tipos de Turbinas: · Turbinas Hidráulicas · Turbinas de Vapor · Turbinas Eólicas · Turbinas de Combustión Turbinas Hidráulicas: Una turbina hidráulica es una turbomáquina motora hidráulica, que aprovecha la energía de un fluido que pasa a través de ella para producir un movimiento de rotación que, transferido mediante un eje, mueve directamente una máquina o bien un generador que transforma la energía mecánica en eléctrica, así son el órgano fundamental de una Central hidroeléctrica. Son aquéllas cuyo fluido de trabajo no sufre un cambio de densidad considerable a través de su paso por el rodete o por el estator; éstas son generalmente las turbinas de agua, que son las más comunes, pero igual se pueden modelar como turbinas hidráulicas a los molinos de viento o aerogeneradores. Historia Las turbinas hidráulicas, junto con los molinos de viento, son las turbomáquinas más antiguas que existen. Se puede explicar su antigüedad por la gran disponibilidad geográfica de las cuencas hidrológicas, siendo los viejos molinos de agua un lugar común. El tipo más antiguo y más simple de turbina hidráulica es la rueda hidráulica, utilizada por primera vez en Grecia y empleada durante la antigüedad y la edad media para moler cereales. Consistía en un eje vertical con un conjunto de aspas o palas radiales situadas en una corriente de agua a gran velocidad. La potencia de la rueda era 86 MANTENIMIENTO INDUSTRIAL de unos 0,5 caballos de vapor (CV). La rueda hidráulica horizontal (o sea, un eje horizontal conectado a una rueda de palas vertical), descrita por primera vez por el arquitecto e ingeniero romano Vitrubio en el siglo I a.C., tenía el segmento inferior de la rueda de palas insertada en la corriente, y actuaba como una rueda hidráulica de empuje inferior. Hacia el siglo II d.C. se empezó a utilizar en las regiones montañosas la rueda hidráulica de empuje superior. En este caso, el agua se vertía sobre las palas desde arriba, y se obtenía energía adicional de la inercia del agua en su caída. En la edad media la potencia máxima de la rueda, fabricada con madera, aumentó de 3 a 50 CV. La transición de la rueda hidráulica a la turbina es sobre todo semántica. El primer intento de formular la base teórica para el diseño de ruedas hidráulicas en el siglo XVIII corresponde al ingeniero civil británico John Smeaton, que demostró que la rueda de empuje superior era más eficaz. Sin embargo, el ingeniero militar francés Jean Víctor Poncelet diseñó una rueda de empuje inferior cuyas palas curvadas aumentaban el rendimiento casi un 70%. El uso de esta máquina se extendió rápidamente. Otro ingeniero militar francés, Claude Burdin, inventó el término turbina, como parte de un análisis teórico en que se daba una gran importancia a la velocidad de rotación. Benoit Fourneyron, un alumno de Burdin en la Escuela de Minería de Saint Étienne, diseñó y construyó ruedas que alcanzaban velocidades de rotación de 60 rpm (revoluciones por minuto) o más y que proporcionaban hasta 50 CV en las factorías metalúrgicas francesas. Por último, Fourneyron construyó turbinas que trabajaban a 2.300 rpm, desarrollando 60 CV y un rendimiento de más del 80%. 87 MANTENIMIENTO INDUSTRIAL A pesar de esta eficiencia excepcional, la turbina de Fourneyron tenía algunos inconvenientes causados por el flujo centrífugo del agua que la atravesaba. Esto provocaba problemas si se reducía el flujo de agua o su carga. El ingeniero estadounidense nacido en Gran Bretaña James B. Francis diseñó una turbina en la que el flujo se producía hacia el interior. La llamada turbina de reacción o turbina Francis se convirtió en la turbina hidráulica más utilizada con presiones de agua, o alturas de caída, equivalentes a una columna de agua de 10 a 100 m. Este tipo de turbina funciona debido a la expansión del agua mientras fluye a través de los espacios entre las palas, lo que produce una fuerza neta, o reacción, con un componente tangencial que pone la rueda en movimiento. La rueda Pelton, cuyo nombre proviene del ingeniero estadounidense Lester Allen Pelton, se empezó a aplicar durante la segunda mitad del siglo XIX, en instalaciones donde la presión del agua era equivalente a una columna de agua de entre 90 y 900 m. En este tipo de turbinas, el agua se conduce desde un depósito a gran altura a través de un canal o una conducción forzada hasta una boquilla eyectora que convierte la energía cinética del agua en un chorro a presión. Dado que la acción de la rueda Pelton depende del impulso del chorro sobre ella, en lugar de la reacción del agua en expansión, este tipo de turbina se denomina también turbina de acción. Figura 189 88 MANTENIMIENTO INDUSTRIAL El aumento de las necesidades de energía hidroeléctrica durante los albores del siglo XX puso de manifiesto la necesidad de turbinas que pudieran aprovechar caídas de agua de 3 a 9 m, que se podrían utilizar en muchos ríos construyendo pequeños embalses de agua. En 1913, el ingeniero austriaco Víctor Kaplan planteó por primera vez la turbina de hélice, que actúa al contrario que la hélice de un barco. Kaplan mejoró la turbina haciendo que las palas pudieran pivotar sobre su eje. Los distintos ángulos de las palas aumentaban el rendimiento ajustando el ángulo al volumen de la caída de agua. Para mantener una salida constante de voltaje en una instalación hidroeléctrica, la velocidad de la turbina se debe mantener constante, independientemente de las variaciones de la presión del agua que las mueve. Esto requiere gran número de controles que, tanto en la turbina de Francis como en la de Kaplan, varían el ángulo de las palas. En las instalaciones de ruedas Pelton, el flujo del agua se controla abriendo y cerrando las boquillas eyectoras. En este caso, se utiliza una boquilla de derivación de descarga, dado que los cambios rápidos de corriente en canales de caída largos podrían producir aumentos repentinos en la presión, llamados martillos de agua, que pueden ser muy dañinos. Con estos ajustes, se mantiene constante el flujo de agua a través de las boquillas. Para ello se cierran las boquillas de descarga, lo que se hace con mucha lentitud para evitar martillos de agua. A grandes rasgos se puede resumir así el desarrollo de las turbinas hidráulicas: El siglo XVIII es el siglo de su gestación. El siglo XIX el de su nacimiento (en este siglo nacieron en América las Turbinas Pelton y las Turbinas Francis). El siglo XX el de su desarrollo. A principios de este siglo aparecen las turbinas hidráulicas de gran velocidad. • • • • • • 1905 – en USA existen turbinas hidráulicas de 7360 Kw girando a 250 rpm (turbinas Francis gemelas), 1915- creación de la Turbina Kaplan, 1918- la turbina Banki 1914- la turbina Turgo 1950- la turbina Deriaz 1970- la turbina Bulbo Las turbinas hidráulicas, como ha podido notarse, son máquinas cuyo desarrollo no pertenece a las últimas décadas. Hace más de 2000 años que el hombre hace uso de ellas y poco más de un siglo que las principales casas constructoras de Europa, Asia y América realizan un esfuerzo sistemático con el objeto de perfeccionarlas. Su evolución no ha terminado sino por el contrario se ha acelerado en los últimos años ya que las 89 MANTENIMIENTO INDUSTRIAL necesidades de energía limpia cada día son mayores y los sitios disponibles exigen turbinas más rápidas, más compactas y sobre todo más eficientes. Figura 190.- Algunas disposiciones y montajes de turbinas hidráulicas 90 MANTENIMIENTO INDUSTRIAL Avances en el Diseño de las Turbinas Hidráulicas: La tendencia en las turbinas hidráulicas modernas es utilizar caídas mayores y máquinas más grandes. Según el tamaño de la unidad, las turbinas Kaplan se emplean en caídas de unos 60 m, y en el caso de las turbinas Francis de hasta 610 m. La instalación de caída más alta del mundo (1.770 m) se encuentra en Reisseck, en Austria, y las turbinas más grandes del mundo están en una planta generadora de la presa de Itaipú, entre Paraguay y Brasil, donde se utilizan 18 turbinas de tipo Francis de 700 megavatios (MW) de potencia cada una, que consiguen un total de 12.600 MW. Muchas de las pequeñas instalaciones en presas construidas antes de 1930 han sido abandonadas debido a su alto coste de mantenimiento y la mano de obra que requieren. Sin embargo, el aumento de los costos de los combustibles fósiles ha hecho volver la mirada hacia este tipo de sistemas de poca caída. Con el desarrollo de turbinas de hélice normalizadas con ejes casi horizontales, las instalaciones pequeñas han recuperado su atractivo original. Clasificación Por ser turbomáquinas siguen la misma clasificación de estas, y pertenecen, obviamente, al subgrupo de las turbomáquinas hidráulicas y al subgrupo de las turbomáquinas motoras. En el lenguaje común de las turbinas hidráulicas se suele hablar en función de las siguientes clasificaciones: De acuerdo al cambio de presión en el rodete o al grado de reacción Dentro de este género suele hablarse de: • Turbinas de acción: Son aquellas en que el fluido no sufre ningún cambio de presión a través de su paso por el rodete. La presión que el fluido tiene a la entrada en la turbina se reduce hasta la presión atmosférica en la corona directriz, manteniéndose constante en todo el rodete. Su principal característica es que carecen de tubería de aspiración. La principal turbina de acción es la Pelton, cuyo flujo es tangencial. Se caracterizan por tener un número específico de revoluciones bajo (ns<=30). El distribuidor en estas turbinas se denomina inyector. Estas turbinas se empezaron a utilizar antes que las de reacción; entre ellas se tienen: Turbina Zuppinger (1846), con rueda tangencial de cucharas. Turbina Pelton, es tangencial, y la más utilizada para grandes saltos. 91 MANTENIMIENTO INDUSTRIAL Turbina Schwamkrug, (1850), radial y centrífuga. Turbina Girard, (1863), axial, con el rodete fuera del agua; mientras el cauce no subía de nivel, trabajaba como una de acción normal, mientras que si el nivel subía y el rodete quedaba sumergido, trabajaba como una de reacción, aunque no en las mejores condiciones; en la actualidad no se utiliza. Turbina Michel, o Banki; el agua pasa dos veces por los álabes del rodete, construido en forma de tambor; se utiliza para pequeños y grandes saltos. Figura 191.- Turbinas de acción 92 MANTENIMIENTO INDUSTRIAL • Turbinas de reacción: Son aquellas en que el fluido sí sufre un cambio de presión considerable a través de su paso por el rodete. El fluido entra en el rodete con una presión superior a la atmosférica y a la salida de éste presenta una depresión. Se caracterizan por presentar una tubería de aspiración, la cual une la salida del rodete con la zona de descarga de fluido. Estas turbinas se pueden dividir atendiendo a la configuración de los álabes. Así, existen las turbinas de álabes fijos (Francis->Flujo diagonal; Hélice->Flujo radial) y turbinas con álabes orientables (Deriaz->Flujo diagonal; Kaplan->Flujo radial). El empleo de álabes orientables permite obtener rendimientos hidráulicos mayores. Estas turbinas se empezaron a utilizar después que las de acción; entre ellas se tienen: Turbina Fourneyron (1833), en la que el rodete se mueve dentro del agua. Es una turbina radial centrífuga, lo que supone un gran diámetro de rodete; en la actualidad no se construye. Turbina Heuschel-Jonval, axial, y con tubo de aspiración; el rodete es prácticamente inaccesible; en la actualidad no se construye. Turbina Francis (1849); es radial centrípeta, con tubo de aspiración; el rodete es de fácil acceso, por lo que es muy práctica. Es fácilmente regulable y funciona a un elevado número de revoluciones; es el tipo más empleado, y se utiliza en saltos variables, desde 0,5 m hasta 180 m; pueden ser, lentas, normales, rápidas y extrarápidas. Turbina Kaplan (1912); las palas del rodete tienen forma de hélice; se emplea en saltos de pequeña altura, obteniéndose con ella elevados rendimientos, siendo las palas orientables lo que implica paso variable. Si las palas son fijas, se denominan turbinas hélice. Figura 192.- Turbinas de reacción 93 MANTENIMIENTO INDUSTRIAL Para clasificar a una turbina dentro de esta categoría se requiere calcular el grado de reacción de la misma. Las turbinas de acción aprovechan únicamente la velocidad del flujo de agua, mientras que las de reacción aprovechan además la pérdida de presión que se produce en su interior. El rango de aplicación (una aproximación) de las turbinas, de menor a mayor salto es: kaplan-francis-pelton El número específico de revoluciones, de menor a mayor es: pelton-franciskaplan. Cuanto mayor es el número específico de revoluciones, tanto mayor es el riesgo de cavitación de la turbina, es decir, una turbina kaplan tiene más probabilidad de que se dé en ella el fenómeno de la cavitación que en una francis o una pelton. De acuerdo al diseño del rodete Esta clasificación es la más determinista, ya que entre las distintas de cada género las diferencias sólo pueden ser de tamaño, ángulo de los álabes o cangilones, o de otras partes de la turbomáquina distinta al rodete. Los tipos más importantes son: • Turbina Kaplan: son turbinas axiales, que tienen la particularidad de poder variar el ángulo de sus palas durante su funcionamiento. Están diseñadas para trabajar con saltos de agua pequeños y con grandes caudales. (Turbina de reacción) • Turbina Hélice: son exactamente iguales a las turbinas kaplan, pero a diferencia de estas, no son capaces de variar el ángulo de sus palas. • Turbina Pelton: Son turbinas de flujo transversal, y de admisión parcial. Directamente de la evolución de los antiguos molinos de agua, y en vez de contar con álabes o palas se dice que tiene cucharas. Están diseñadas para trabajar con saltos de agua muy grandes, pero con caudales pequeños. (Turbina de acción) • Turbina Francis: Son turbinas de flujo mixto y de reacción. Existen algunos diseños complejos que son capaces de variar el ángulo de sus álabes durante su funcionamiento. Están diseñadas para trabajar con saltos de agua medios y caudal medios. 94 MANTENIMIENTO INDUSTRIAL Figura 193.- Dimensiones de rodetes Francis y Kaplan Turbinas de Vapor: El éxito obtenido con las turbinas de agua condujo a utilizar el principio de la turbina para extraer energía del vapor de agua. Mientras que la máquina de vapor de vaivén desarrollada por el inventor e ingeniero escocés James Watt utilizaba la presión del vapor, la turbina consigue mejores rendimientos al utilizar también la energía cinética de éste. La turbina puede ser más pequeña, más ligera y más barata que una máquina de vapor de vaivén de la misma potencia, y puede ser de un tamaño mucho mayor que las máquinas de vapor convencionales. Desde el punto de vista de la mecánica, tiene la ventaja de producir directamente un movimiento giratorio sin necesidad de una manivela o algún otro medio de convertir la energía de vaivén en energía rotatoria. Como resultado de ello, la turbina de vapor ha reemplazado a las máquinas de vaivén en las centrales generadoras de energía eléctrica, y también se utiliza como una forma de propulsión a chorro. Figura 194 95 MANTENIMIENTO INDUSTRIAL Las turbinas de vapor se utilizan en la generación de energía eléctrica de origen nuclear y en la propulsión de los buques con energía nuclear. En las aplicaciones de cogeneración que requieran tanto calor (el utilizado en un proceso industrial) como electricidad, se genera vapor a altas presiones en una caldera y se extrae desde la turbina a la temperatura y la presión que necesita el proceso industrial. Las turbinas de vapor se pueden utilizar en ciclos (escalones) combinados con un generador de vapor que recupera el calor que se perdería. Las unidades industriales se utilizan para poner en movimiento máquinas, bombas, compresores y generadores eléctricos. La potencia que se obtiene puede ser de hasta 1.300 MW. La turbina de vapor no fue inventada por una única persona, sino que fue el resultado del trabajo de un grupo de inventores a finales del siglo XIX. Algunos de los participantes más notables en este desarrollo fueron el británico Charles Algernon Parsons y el sueco Carl Gustaf Patrik de Laval. Parsons fue responsable del denominado principio de escalones, mediante el cual el vapor se expandía en varias fases, aprovechándose su energía en cada una de ellas. De Laval fue el primero en diseñar chorros y palas adecuados para el uso eficiente de la expansión del vapor. Funcionamiento de la turbina de vapor: El funcionamiento de la turbina de vapor se basa en el principio termodinámico que expresa que cuando el vapor se expande disminuye su temperatura y se reduce su energía interna. Esta reducción de la energía interna se transforma en energía mecánica por la aceleración de las partículas de vapor, lo que permite disponer directamente de una gran cantidad de energía. Cuando el vapor se expande, la reducción de su energía interna en 400 calorías puede producir un aumento de la velocidad de las partículas a unos 2.900 km/h. A estas velocidades la energía disponible es muy elevada, a pesar de que las partículas son extremadamente ligeras. Figura 195.- El trabajo disponible en la turbina es igual a la diferencia de entalpia entre el vapor de entrada a la turbina y el de salida. 96 MANTENIMIENTO INDUSTRIAL El hecho de la utilización del vapor como fluido de trabajo se debe a la elevada energía disponible por unidad de kg de fluido de trabajo. Este ratio en el caso del agua es tres veces mayor que en el caso del aire de forma para dos turbinas, una de vapor y otra de gas con la misma potencia de salida se tiene que el gasto másico de la turbina de vapor es tres veces menor que el de la turbina de gas. Dada la gran diferencia que se debe obtener entre la presión de entrada y de salida de la turbina es necesario producir esta expansión en distintas etapas, escalonamientos, con el fin de obtener un mejor rendimiento de la operación. Si sólo se realizase la expansión en una etapa las grandes deflexiones a que tendría que estar sometido el fluido provocarían pérdidas inaceptables. Las pérdidas en una turbina de n escalones no son iguales a la suma de las pérdidas de n turbinas sino que son menores, ya que los escalones de la turbina son capaces de recuperar parte de la energía degradada en el anterior escalón para generar energía mecánica. Sin embargo a medida que aumenta el número de escalonamientos la máquina se encarece, por lo que hay que buscar un buen compromiso entre rendimiento y costes. Si bien están diseñadas de dos formas diferentes, acción y reacción, las partes fundamentales de las turbinas de vapor son similares. Consisten en boquillas o chorros a través de los que pasa el vapor en expansión, descendiendo la temperatura y ganando energía cinética, y palas sobre las que actúa la presión de las partículas de vapor a alta velocidad. La disposición de los chorros y las palas depende del tipo de turbina. Además de estos dos componentes básicos, las turbinas cuentan con ruedas o tambores sobre los que están montadas las palas, un eje para las ruedas o los tambores, una carcasa exterior que retiene el vapor dentro de la zona de la turbina, y varios componentes adicionales como dispositivos de lubricación y controladores. Estudio constructivo de los elementos de las turbinas Los elementos principales de una turbina de vapor son: • Rotor. Es el elemento móvil del sistema. La energía desprendida por el vapor en la turbina se convierte en energía mecánica en este elemento. Figura 196.- Rotor forjado con el eje constituyendo una pieza 97 MANTENIMIENTO INDUSTRIAL Dado que la turbina está dividida en un cierto número de escalonamientos, el rotor está compuesto por una serie de coronas de alabes, uno por cada escalonamiento de la turbina. Los alabes se encuentran unidos solidariamente al eje de la turbina moviéndose con él. Figura 197.- Diversos sistemas de fijación y montaje de aletas con cola de milano • Estator. El estator está constituido por la propia carcasa de la turbina. Al igual que el rotor, el estator está formado por una serie de coronas de alabes, correspondiendo cada una a una etapa o escalonamiento de la turbina. Figura 198 98 MANTENIMIENTO INDUSTRIAL • Álabes, órganos de la turbina donde tiene lugar la expansión del vapor. • Álabes fijos, van ensamblados en los diagramas que forman parte del estator. Sirven para darle la dirección adecuada al vapor y que empuje sobre los álabes móviles. • Diafragmas, son discos que van dispuestos en el interior de la carcasa perpendicularmente al eje y que llevan en su periferia los álabes fijos. • Cojinetes, son los elementos que soportan los esfuerzos y el peso del eje de la turbina. Los cojinetes pueden ser radiales, que son aquellos que soportan los esfuerzos verticales y el peso del eje, o axiales, soportan el esfuerzo en la dirección longitudinal del eje. • Sistemas de estanqueidad, son aquellos sistemas de cierre situados a ambos extremos del eje de la turbina que evitan que escape el vapor de la turbina. 1) Sellados del rotor, son elementos mecánicos que evitan que escape vapor de la turbina al exterior, por los lados del eje en las carcasas de alta y de media presión y además evitan la entrada de aire en las carcasas de baja presión. Pueden ser de metal o de grafito. Normalmente en las máquinas de gran potencia los cierres son metálicos de tipo laberinto. 2) Regulación del sistema de sellado en una turbina de condensación. • Estanqueidad interior, son los mecanismos que evitan la fuga de vapor entre los álabes móviles y fijos en las etapas sucesivas de la turbina. • Toberas. El vapor es alimentado a la turbina a través de estos elementos. Su labor es conseguir una correcta distribución del vapor entrante/saliente al/desde el interior de la turbina. Figura 199 99 MANTENIMIENTO INDUSTRIAL Clasificación de las turbinas de vapor Existen las turbinas de vapor en una gran variedad de tamaños, desde unidades de 1 hp (0.75 Kw) usadas para accionar bombas, compresores y otro equipo accionado por flecha, hasta turbinas de 2.000.000 hp (1.500.000 Kw) utilizadas para generar electricidad. Hay diversas clasificaciones para las turbinas de vapor modernas, y por ser turbomáquinas son susceptibles a los mismos criterios de clasificación de éstas, aunque los tipos fundamentales que nos interesan son: - Según el número de etapas o escalonamientos: 1) Turbinas monoetapa, son turbinas que se utilizan para pequeñas y medianas potencias. 2) Turbinas multietapa, aquellas en las que la demanda de potencia es muy elevada, y además interesa que el rendimiento sea muy alto. - Según la presión del vapor de salida: 1) Contrapresión, en ellas el vapor de escape es utilizado posteriormente en el proceso. 2) Escape libre, el vapor de escape va hacia la atmósfera. Este tipo de turbinas despilfarra la energía pues no se aprovecha el vapor de escape en otros procesos como calentamiento, etc. 3) Condensación, en las turbinas de condensación el vapor de escape es condensado con agua de refrigeración. Son turbinas de gran rendimiento y se emplean en máquinas de gran potencia. - Según la forma en que se realiza la transformación de energía térmica en energía mecánica: 1) Turbinas de acción, en las cuales la transformación se realiza en los álabes fijos. 2) Turbinas de reacción, en ellas dicha transformación se realiza a la vez en los álabes fijos y en los álabes móviles. - Según la dirección del flujo en el rodete. 1) Axiales, el paso de vapor se realiza siguiendo un con que tiene el mismo eje que la turbina. Es el caso más normal. 100 MANTENIMIENTO INDUSTRIAL 2) Radiales, el paso de vapor se realiza siguiendo todas las direcciones perpendiculares al eje de la turbina. - Turbinas con y sin extracción. En las turbinas con extracción se extrae una corriente de vapor de la turbina antes de llegar al escape. Turbinas de acción y reacción • Turbinas de Acción: El cambio o salto entálpico o expansión es realizada en los álabes directores o las toberas de inyección si se trata de la primera etapa de un conjunto de turbinas, estos elementos están sujetos al estator. En el paso del vapor por el rotor la presión se mantendrá constante y habrá una reducción de la velocidad. Esta es la forma más sencilla de turbina de vapor, en la que los chorros de la turbina están sujetos a un punto dentro de la carcasa de la turbina, y las palas están dispuestas en los bordes de ruedas que giran alrededor de un eje central. El vapor pasa a través de las boquillas y alcanza las palas. Éstas absorben una parte de la energía cinética del vapor en expansión, lo que hace girar la rueda y con ella el eje al que está unida. La turbina está diseñada de forma que el vapor que entra por un extremo de la misma se expande a través de una serie de boquillas hasta que ha perdido la mayor parte de su energía interna. Figura 200.- Esquema longitudinal de una turbina Zoelly, 3,5 MW, 3000 rpm 101 MANTENIMIENTO INDUSTRIAL • Turbinas de Reacción: La expansión, es decir, el salto entálpico del vapor puede realizarse tanto en el rotor como en el estator, cuando este salto ocurre únicamente en el rotor la turbina se conoce como de reacción pura. En la turbina de reacción la energía mecánica se obtiene de la aceleración del vapor en expansión. Las turbinas de este tipo cuentan con dos grupos de palas, unas móviles y las otras fijas. Las palas están colocadas de forma que cada par actúa como una boquilla a través de la cual pasa el vapor mientras se expande. Las palas de las turbinas de reacción suelen montarse en un tambor en lugar de una rueda. El tambor actúa como eje de la turbina. Para que la energía del vapor se utilice eficientemente en ambos tipos de turbina, es necesario utilizar varios escalones en cada uno de los cuales se convierte en energía cinética una parte de la energía térmica del vapor. Si se hiciera toda la conversión de los dos tipos de energía en un solo escalón, la velocidad rotatoria de la rueda sería excesiva. Por lo general, se utilizan más escalones en las turbinas de reacción que en las turbinas de acción. Se puede comprobar que, con el mismo diámetro y la misma cantidad de energía, la turbina de reacción necesita el doble de escalones para obtener un rendimiento máximo. Las turbinas más grandes, que normalmente son de acción, emplean hasta cierto grado la reacción al principio del recorrido del vapor para que el flujo de vapor sea eficaz. Muchas de las turbinas de reacción utilizan primero un escalón de control de acción, lo que reduce el número de escalones necesarios. Figura 201.- Esquema de los escalonamientos de una turbina Zoelly A causa del aumento de volumen del vapor cuando se expande, es necesario aumentar en cada escalón el tamaño de las aberturas a través de las cuales pasa el vapor. Durante el diseño real de las turbinas, este aumento se consigue alargando las palas de un escalón a otro y aumentando el diámetro del tambor o la rueda a la que están 102 MANTENIMIENTO INDUSTRIAL acopladas las palas. También se agregan dos o más secciones de turbina en paralelo. Como resultado de esto, una turbina industrial pequeña puede ser prácticamente cónica, con el diámetro más pequeño en el extremo de entrada, de mayor presión, y el diámetro mayor en el extremo de salida. Las grandes turbinas de una central eléctrica nuclear pueden tener cuatro rotores con una sección de alta presión con flujo doble, seguida de tres secciones de baja presión y flujo doble. Las turbinas de vapor son máquinas simples que tienen prácticamente una sola parte móvil, el rotor. Sin embargo, requieren algunos componentes auxiliares para funcionar: cojinetes de contacto plano para sostener el eje, cojinetes de empuje para mantener la posición axial del eje, un sistema de lubricación de los cojinetes y un sistema de estanqueidad que impide que el vapor salga de la turbina y que el aire entre en ella. La velocidad de rotación se controla con válvulas en la admisión de vapor de la máquina. La caída de presión en las palas produce además una fuerza axial considerable en las palas móviles, lo que se suele compensar con un pistón de equilibrado, que crea a su vez un empuje en sentido opuesto al del vapor. La eficiencia de expansión de las turbinas modernas de varios escalones es alta, dado el avanzado estado de desarrollo de los componentes utilizados en las turbinas y la posibilidad de recuperar las pérdidas de un escalón en los siguientes, con un sistema de recalentamiento. El rendimiento que se obtiene al transformar en movimiento la energía teóricamente disponible suele superar el 90%. La eficiencia termodinámica de una instalación de generación con vapor es mucho menor, dada la pérdida de energía del vapor que sale de la turbina. Abastecimiento de Vapor y Condiciones de Escape Estas categorías incluyen turbinas condensadoras, no condensadoras, de recalentamiento, extracción e inducción. Las turbinas de No condensación o de contrapresión son más ampliamente usadas para aplicaciones de vapor en procesos. La presión de salida es controlada por una válvula reguladora para satisfacer las necesidades de presión en el vapor del proceso. Se encuentran comúnmente en refinerías, plantas de papel y pulpa y en instalaciones de desalinización, donde se dispone de grandes cantidades de vapor de proceso a baja presión. Figura 202.- Sección de una turbina de contrapresión 103 MANTENIMIENTO INDUSTRIAL Las turbinas condensadoras se encuentran comúnmente en plantas de potencia eléctrica. Estas turbinas expelen vapor en estado parcialmente saturado, generalmente con calidad mayor al 90%, a una presión bastante inferior a la atmosférica hacia un condensador. Figura 203.- Sección de una turbina de condensación Las turbinas de recalentamiento también son usadas casi exclusivamente en plantas de potencia eléctrica. En una turbina de recalentamiento, el flujo de vapor sale de una sección a alta presión de la turbina y es regresado a la caldera donde se le vuelve a sobrecalentar. El vapor entonces regresa a una sección de presión intermedia de la turbina y continúa su expansión. Las turbinas de extracción se encuentran en todo tipo de aplicaciones. En una turbina de extracción, el vapor es liberado en diversas etapas y aprovechado en distintos procesos industriales, también puede ser enviado a calentadores de agua para mejorar la eficiencia del ciclo. Regulación de las turbinas de vapor Para poder adaptar la potencia de una turbina de velocidad constante a la demanda de una máquina receptora (alternador), se pueden utilizar algunos de los siguientes tipos de regulación: a) Regulación por variación de la presión en la admisión, que se consigue mediante laminación en la válvula de admisión o variando la presión en la caldera, (regulación cualitativa). b) Regulación por variación del número de toberas activas en la admisión sobre la primera corona, (regulación por admisión parcial o regulación cuantitativa). 104 MANTENIMIENTO INDUSTRIAL Los sistemas más utilizados en la regulación de las turbinas de vapor son: Regulación de una turbina de condensación.- En la regulación de una turbina de condensación, Fig. 204, el taquímetro actúa sobre una válvula de distribución de corredera que establece la presión del aceite en función de la velocidad, provocando un desplazamiento de la válvula de distribución de corredera que alimenta el motor de las válvulas de doble efecto. Figura 204.- Esquema de regulación de una turbina de condensación Un sistema de mando por palanca y manguito asegura la estabilidad de la regulación. El estatismo se introduce modificando la posición del punto de pivotamiento de la palanca de accionamiento. La regulación de la velocidad se asegura desplazando el manguito que contiene la varilla del taquímetro modificando así la posición de equilibrio de este último. En otro sistema de regulación de turbinas de condensación, un taquímetro acciona, mediante una palanca y un relé, una válvula de corredera que proporciona un 105 MANTENIMIENTO INDUSTRIAL consumo de aceite cuya presión se modula en función de la velocidad de rotación de la turbina y que se aplica a un pistón, de forma que en régimen transitorio, los desplazamientos de este pistón originan el desplazamiento de una válvula de corredera de distribución de aceite en un servomotor de doble efecto, que acciona las válvulas de regulación. En otro sistema de este tipo, la válvula de corredera se acciona directamente por el taquímetro, asegurándose el estatismo mediante levas fácilmente accesibles. Regulación de una turbina de contrapresión.- La regulación de una turbina de contrapresión, Fig. 205, consta de dos mecanismos que establecen la presión del aceite, uno en función de la velocidad, y otro en función de la contrapresión. Figura 205.- Esquema de regulación de una turbina de contrapresión 106 MANTENIMIENTO INDUSTRIAL Un distribuidor de mando permite elegir el mecanismo que actúa sobre las válvulas de alimentación de la turbina. El regulador de contrapresión lleva una membrana sobre la que actúa el vapor después de un laminado eventual en un transformador de presión (expansión a entalpía constante). Los movimientos de la membrana producen una modulación de la presión del aceite aplicada en la válvula distribuidora de corredera del regulador. Una vez puesto el grupo en marcha, se regula la velocidad (que se mantiene constante por la frecuencia síncrona de la red), entrando en acción el regulador de contrapresión mediante una inversión del distribuidor de mando, asegurándose de que en el manómetro, doble, coincidan las presiones de aceite dadas por los dos reguladores. Si mientras la turbina está regulando la contrapresión, la velocidad aumenta por cualquier circunstancia, la presión de aceite disminuye por la acción del regulador de velocidad, hasta que en el límite previsto de sobrevelocidad, un resorte situado bajo el distribuidor de maniobra invierte automáticamente este último sobre el regulador de velocidad. Cuando las condiciones de servicio vuelven a ser normales, se puede invertir manualmente el distribuidor sobre el regulador de contrapresión. Regulación de una turbina mediante un mecanismo hidráulico.- La Fig. 206 muestra un esquema simplificado de este mecanismo que consta de una bomba centrífuga accionada por el eje de la turbina que proporciona el aceite de engrase y de regulación. Figura 206.- Mecanismo de regulación hidráulica 107 MANTENIMIENTO INDUSTRIAL Una pequeña parte del aceite que inyecta esta bomba llega, por una pequeña abertura calibrada, a la periferia de la bomba de regulación 2 y se esparce en sentido centrípeto a través de este órgano. La fuerza centrífuga actúa frente a esta corriente de aceite que circula hacia el interior y origina la presión primaria de regulación que es proporcional al cuadrado de la velocidad de rotación. Las pequeñas variaciones de la presión se detectan en el transformador de presión 3 dando lugar a variaciones de presión proporcionales y mucho mayores en el cilindro-relé 1 que acciona la válvula de corredera del motor de laminación 5 por medio de la varilla 6. Dispositivos de seguridad y presión Una línea de seguridad consta, en general, de: a) Uno o varios órganos de detección de las anomalías de funcionamiento b) Órganos de transmisión de las órdenes c) Órganos de cierre Los grupos importantes llevan una doble línea de seguridad, siendo indispensable que las dos cadenas de órganos que las constituyen sean rigurosamente independientes. También es necesario que cada línea de seguridad se pueda comprobar periódicamente, incluso con el grupo en marcha; también es necesario que toda avería de un sistema de transmisión de órdenes o de potencia, como la falta de presión de aceite, dé lugar al cierre de los órganos de parada. La vigilancia de la explotación se realiza con aparatos detectores y registradores automáticos que dan las indicaciones indispensables para la marcha de las máquinas, como: - Registradores de la dilatación absoluta de los distintos cuerpos - Registradores de la dilatación diferencial entre los rotores y el estator - Registradores de la deformación y la flecha del estator - Registradores de la posible ovalización de los rotores - Indicadores y registradores de las vibraciones de los distintos cojinetes y del desgaste del soporte - Registradores de la temperatura del vapor y de los distintos puntos del estator, etc. 108 MANTENIMIENTO INDUSTRIAL El control de la marcha de los grupos se realiza mediante ordenador, teniendo en cuenta el historial del grupo, como la duración de parada, (es decir, su estado de refrigeración), etc. VÁLVULAS DE REGULACIÓN Y VÁLVULAS DE CIERRE.- Las válvulas de regulación pueden ser de placa simple, perfiladas y de doble asiento. Las válvulas de regulación de placa simple se utilizan para gastos másicos y presiones moderadas; los esfuerzos de maniobra son elevados, por lo que los motores y las varillas son relativamente pesados. La estanqueidad es satisfactoria y la velocidad del vapor en la sección más estrangulada se puede admitir del orden de 50 a 60 m/seg. Las válvulas esféricas con difusor, se utilizan con frecuencia, y permiten obtener una reducción de los esfuerzos de regulación, pudiéndose admitir velocidades del vapor de 70 a 90 m/seg. Para reducir los esfuerzos de maniobra se aumenta su número. Las válvulas de doble asiento, equilibradas, permiten un gasto másico grande y presiones elevadas; las dilataciones hacen que la estanqueidad sea aleatoria. La velocidad de flujo del vapor es del orden de 40 a 50 m/seg. Las válvulas de parada de cierre rápido, que al mismo tiempo son las válvulas de cierre principal de la turbina, se fabrican de un solo asiento. En el caso de diámetros grandes y presiones altas, se facilita la maniobra de apertura mediante una válvula piloto. La apertura se puede hacer a mano mediante un servomotor; el cierre rápido se produce por puesta en vacío del aceite contenido en el servomotor, Fig. 207. 109 MANTENIMIENTO INDUSTRIAL Turbinas Eólicas: El viento es una forma de energía solar. Los vientos son causados por el calentamiento desigual de la atmósfera por el sol, las irregularidades de la superficie de la tierra y la rotación de la tierra. Los vientos son modificados por el terreno, el agua y la vegetación de la tierra. Los seres humanos utilizan este flujo del viento, o energía del movimiento, para muchos propósitos: navegar, volar una cometa, generar electricidad, etc. El término energía eólica describe el proceso por el cual el viento se utiliza para generar energía mecánica o electricidad. Las turbinas eólicas convierten la energía cinética del viento en energía mecánica. Esta energía mecánica se puede utilizar para tareas específicas (como bombear agua) o un generador puede convertir esta energía mecánica en electricidad. A partir de los tradicionales molinos de viento usados para moler granos y los molinos bombeadores de agua usados en el campo, se ha producido en las últimas décadas una evolución hacia las modernas turbinas eólicas. Estas turbinas operan con un elevado rendimiento aerodinámico de su hélice que les permite captar aproximadamente 4 veces más energía del viento. Funcionan como un molino de viento, pero en lugar de impulsar una muela, controla un generador. Una turbina eólica funciona al contrario que un ventilador, en lugar de utilizar electricidad para producir viento, como un ventilador, las turbinas eólicas utilizan el viento para producir electricidad. El viento da vueltas a las láminas, que hacen girar un eje, que conecta con un generador y produce electricidad. La energía del viento da vueltas a dos o tres láminas a modo de propulsor alrededor de un rotor. El rotor está conectado con el eje principal, que hace girar un generador para crear electricidad. 110 MANTENIMIENTO INDUSTRIAL Las turbinas eólicas se montan en una torre para capturar la máxima energía. A unos 30 metros de altura o más, pueden aprovechar viento más rápido y menos turbulento. En definitiva, una turbina eólica es un dispositivo mecánico que convierte la energía del viento en electricidad. Las turbinas eólicas se diseñan para convertir la energía del movimiento del viento (energía cinética) en la energía mecánica, movimiento de un eje. Luego en los generadores de la turbina, ésta energía mecánica se convierte en electricidad. La electricidad generada se puede almacenar en baterías, o utilizar directamente. Hay tres leyes físicas básicas que gobiernan la cantidad de energía aprovechable del viento. La primera ley indica que la energía generada por la turbina es proporcional a la velocidad del viento al cuadrado. La segunda ley indica que la energía disponible es directamente proporcional al área barrida de las paletas. La energía es proporcional al cuadrado de la longitud de las paletas. La tercera ley indica que existe una eficacia teórica máxima de los generadores eólicos del 59%. En la práctica, la mayoría de las turbinas de viento son mucho menos eficientes que esto, y se diseñan diversos tipos para obtener la máxima eficacia posible a diversas velocidades del viento. Figura 210.- Energía eólica En la práctica las turbinas eólicas se diseñan para trabajar dentro de ciertas velocidades del viento. La velocidad más baja, llamada velocidad de corte inferior que es generalmente de 4 a 5 m/s, pues por debajo de esta velocidad no hay suficiente energía como para superar las pérdidas del sistema. La velocidad de corte superior es determinada por la capacidad de una máquina en particular de soportar fuertes vientos. La velocidad nominal es la velocidad del viento a la cual una máquina particular alcanza su máxima potencia nominal. Por arriba de esta velocidad, se puede contar con mecanismos que mantengan la potencia de salida en un valor constante con el aumento de la velocidad del viento. Existen diferentes tipos de aerogeneradores, dependiendo de su potencia, la disposición de su eje de rotación, el tipo de generador etc. 111 MANTENIMIENTO INDUSTRIAL Hoy la tecnología de los aerogeneradores de mediana y pequeña potencia (500 Kw) está madura, por lo que se pueden adquirir en el mercado mundial más de veinte diferentes fabricantes. Las turbinas eólicas pequeñas, de menos de 50 kilovatios, se utilizan para viviendas, antenas de telecomunicaciones, o para el bombeo de agua. A veces se utilizan las turbinas pequeñas junto con generadores diesel, baterías, y sistemas fotovoltaicos. Estos sistemas se llaman sistemas eólicos híbridos y se utilizan normalmente en sitios apartados, donde no es posible la conexión a la red eléctrica o en sitios donde la conexión a la red eléctrica es muy cara. Las turbinas eólicas grandes varían en tamaño, de 50 kilovatios a varios megavatios. Las turbinas grandes se agrupan en granjas eólicas, que proporcionan energía a la red eléctrica. Para aportar energía a la red eléctrica, los aerogeneradores deben estar dotados de un sistema de sincronización para que la frecuencia de la corriente generada se mantenga perfectamente sincronizada con la frecuencia de la red. Las turbinas que se encuentran en el mercado son muy confiables, con factores de disponibilidad de más de un 98%, lo cual significa que pueden operar durante más del 98% del año; generalmente, apagándose sólo durante el período de mantenimiento. Además las turbinas sólo requieren mantenimiento cada seis meses. Aparte de las características del viento, la cantidad de energía que pueda ser transferida depende de la eficiencia del sistema y del diámetro del rotor. Las mejores aeroturbinas que se construyen actualmente tienen un índice global de eficiencia (tomando en cuenta la del rotor y el generador) de casi 35%. Los progresos en el diseño de las actuales turbinas, se han debido principalmente a los avances realizados en el cálculo de la forma geométrica de la hélice óptima. La energía eólica se está volviendo más popular en la actualidad, al haber demostrado la viabilidad industrial, y nació como búsqueda de una diversificación en el 112 MANTENIMIENTO INDUSTRIAL abanico de generación eléctrica ante un crecimiento de la demanda y una situación geopolítica cada vez más complicada en el ámbito de los combustibles tradicionales Es una fuente de energía limpia y económica. Para extraer la mayor cantidad posible de energía la turbina cuenta con unas enormes aspas de hasta 10 metros. Componentes de las turbinas eólicas Existen varios tipos de turbinas y cada una puede tener diferentes componentes, dependiendo de la aplicación; sin embargo, se pueden reconocer algunos comunes, como se explica a continuación y se ilustra en la Figura 213. 113 MANTENIMIENTO INDUSTRIAL Los componentes son: · Rotor · Tren de potencia o conversión mecánica · Sistema eléctrico · Chasis · Sistema de orientación · Torre · Sistema de seguridad a. Rotor El rotor es el elemento principal de una máquina eólica, siendo su función la transformación de la energía cinética del viento en mecánica utilizable. Existe gran variedad de rotores y su clasificación más usual se realiza en función de la disposición del eje: horizontal o vertical, de los cuales el primero es el más común. Los rotores de eje horizontal tienen aspas que giran en un plano vertical como las hélices de un avión. Para sistemas de generación eléctrica, el rotor consiste generalmente en dos o tres aspas y está hecho de fibra de vidrio con poliéster o epoxy; además el cubo que conecta las aspas al eje. Los rotores de sistemas para aplicaciones mecánicas suelen tener más aspas (10 a 20), y giran a velocidades más bajas. El rotor de una turbina eólica puede variar en tamaño, lo cual afecta la cantidad de energía correspondiente que se puede generar. Por ejemplo, una turbina de 10 Kw típicamente tiene un diámetro de rotor de siete metros, mientras que una turbina de 750 Kw tiene un diámetro de 24 metros. b. Tren de potencia o conversión mecánica El tren de potencia está constituido por el eje de velocidad baja, la caja de cambios de velocidad, el eje de velocidad alta y las balineras o cojinetes que soportan los ejes. Se aplica en sistemas grandes eléctricos para adaptar la velocidad del eje a la del generador. Algunas turbinas no contienen la caja de cambios. c. Sistema eléctrico En sistemas de generación eléctrica, éste se refiere al generador, el cual está acoplado al eje para transformar la energía mecánica en eléctrica. Además, consiste en las interfaces para la conexión a las aplicaciones o a la red eléctrica. d. Chasis Contiene los elementos claves de la turbina, como la caja de cambios y el generador. En turbinas grandes, el chasis puede tener el tamaño de un microbús y el 114 MANTENIMIENTO INDUSTRIAL personal de mantenimiento entra a él desde la torre. Usualmente, es una pieza metálica forjada sobre la cual se montan las diferentes partes del tren de conversión modularmente, al mismo tiempo que lo protege del ambiente y sirve de aislante al ruido mecánico de la caja de cambios y del generador. e. Sistema de orientación Las máquinas de eje horizontal tienen este componente, el cual detecta la orientación del viento y coloca el rotor en su misma dirección para aprovecharlo al máximo. El sistema de orientación está compuesto por el cojinete, los motores eléctricos, los sensores y un freno mecánico. f. Torre Las máquinas eólicas deben estar situadas sobre una estructura de soporte capaz de aguantar el empuje del viento que transmiten el sistema de captación y las eventuales vibraciones. Su altura debe ser suficiente para evitar que las turbulencias, debidas al suelo, afecten a la máquina y para superar los obstáculos cercanos. Por ejemplo, una turbina de 750 Kw tiene una altura típica de 63 metros. El uso de torres más altas significa un costo mayor al inicio, pero éste disminuye el período de la recuperación de la inversión, debido a que la velocidad del viento aumenta con la altura y logra generar más energía. g. Sistema de seguridad Este pone la turbina en una situación estable y segura, en caso de que ocurran anomalías tales como pérdida de carga, velocidad de rotación o temperatura del generador a caja de cambios demasiado altas. Tipos de aerogeneradores A lo largo de la historia han existido varios modelos de molinos de viento, los cuales pueden dividirse en grupos: • De eje vertical. • De arrastre diferencial. • De pantalla. • De válvulas abatibles. • De palas giratorias. • De variación cíclica de incidencia de palas fijas. • De variación cíclica de incidencia de palas móviles. • De eje horizontal. • Molinos de viento clásicos. • Eólicas lentas. • Eólicas rápidas. 115 MANTENIMIENTO INDUSTRIAL No obstante los modelos más empleados en la actualidad se reducen o dos tipos básicos: los modelos con turbinas eólicas de eje horizontal y los modelos con turbinas eólicas de eje vertical. Aerogeneradores de eje horizontal Son aquellos en los que el eje de rotación del equipo se encuentra paralelo al piso. Ésta es la tecnología que se ha impuesto, por su eficiencia y confiabilidad y la capacidad de adaptarse a diferentes potencias. Todos los aerogeneradores de eje horizontal tienen su eje de rotación principal en la parte superior de la torre, que tiene que orientarse hacia el viento de alguna manera. Los aerogeneradores pequeños se orientan mediante una veleta, mientras que los más grandes utilizan un sensor de dirección y se orientan por servomotores. Dado que la velocidad de rotación de las aspas es baja, la mayoría hacen uso de una caja reductora para aumentar la velocidad de rotación del generador eléctrico. En general, la hélice está emplazada de tal manera que el viento, en su dirección de flujo, la encuentre antes que a la torre (rotor a barlovento). Esto disminuye las cargas adicionales que genera la turbulencia de la torre en el caso en que el rotor se ubique detrás de la misma (rotor a sotavento). Las palas de la hélice se montan a una distancia razonable de la torre y tienen alta rigidez, de tal manera que al rotar y vibrar naturalmente no choquen con la torre en caso de vientos fuertes. A pesar de la desventaja en el incremento de la turbulencia, se han construido aerogeneradores con hélices localizadas en la parte posterior de la torre, debido a que se orientan en contra del viento de manera natural, sin necesidad de usar un mecanismo de control. Sin embargo, la experiencia ha demostrado la necesidad de un sistema de orientación para la hélice que la ubique delante de la torre. Este tipo de montaje se justifica debido a la gran influencia que tiene la turbulencia en el desgaste de las aspas por fatiga. La mayoría de los aerogeneradores actuales son de este último tipo. En general, los aerogeneradores modernos de eje horizontal se diseñan para trabajar con velocidades del viento que varían entre 3 y 24 m/s de promedio. La primera es la llamada velocidad de conexión y la segunda la velocidad de corte. Básicamente, el aerogenerador comienza produciendo energía eléctrica cuando la velocidad del viento supera la velocidad de conexión y, a medida que la velocidad del viento aumenta, la potencia generada es mayor, siguiendo la llamada curva de potencia. 116 MANTENIMIENTO INDUSTRIAL Asimismo, es necesario un sistema de control de las velocidades de rotación para que, en caso de vientos excesivamente fuertes, que podrían poner en peligro la instalación, haga girar a las palas de la hélice de tal forma que éstas presenten la mínima oposición al viento, con lo que la hélice se detendría. Para aerogeneradores de gran potencia, algunos tipos de sistemas pasivos, utilizan características aerodinámicas de las palas que hacen que aún en condiciones de vientos muy fuertes el rotor se detenga. Esto se debe a que él mismo entra en un régimen llamado "pérdida aerodinámica". Aerogeneradores de eje vertical Son aquellos en los que el eje de rotación se encuentra perpendicular al suelo. También se denominan VAWT (del inglés, Vertical Axis Wind Turbine). Sus ventajas son: 1) no necesitan torre, por lo que la instalación y mantenimiento de los sistemas de generación es más fácil 2) no necesitan mecanismo de orientación para orientarse respecto al viento Sus desventajas: 1) al estar cerca del suelo la velocidad del viento es baja 2) baja eficiencia 3) no son de arranque automático, requieren conexión a la red para poder arrancar utilizando el generador como motor 4) requieren cables tensores Turbina de combustión: Suelen llamarse también turbina de gas es un motor que utiliza el flujo de gas como medio de trabajo para convertir energía térmica en energía mecánica. El gas se produce en el motor como resultado de la combustión de determinadas materias. Unas toberas estacionarias lanzan chorros de dicho gas contra los álabes (paletas) de una 117 MANTENIMIENTO INDUSTRIAL turbina, y el impulso de los chorros hace girar el eje de la turbina. Una turbina de combustión de ciclo simple incluye un compresor que bombea aire comprimido a la cámara de combustión. El combustible, en forma gaseosa o nebulizada, también se inyecta en dicha cámara, donde se produce la combustión. Los productos de la combustión salen de la cámara a través de las toberas y hacen moverse la turbina, que impulsa el compresor y una carga externa como un generador eléctrico. En una turbina o un compresor, una fila de alabes fijos y una fila correspondiente de alabes móviles unidos a un rotor se denominan una etapa. Las máquinas grandes emplean compresores y turbinas de flujo axial con varias etapas. Figura 216.- Turbina de gas La eficiencia del ciclo de una turbina de combustión está limitada por la necesidad de un funcionamiento constante a temperaturas altas en la cámara de combustión y en las primeras etapas de la turbina. Una turbina de gas pequeña de ciclo simple puede tener una eficiencia termodinámica relativamente baja en comparación con un motor de gasolina corriente. Los avances en los materiales resistentes al calor, los recubrimientos protectores y los sistemas de enfriamiento han hecho posible, grandes unidades con una eficiencia en ciclo simple del 34% o más. El rendimiento de una turbina de gas se mejora utilizando una refrigeración intermedia durante la compresión, y un recalentamiento durante la expansión en la turbina. La compresión y la expansión no pueden ser isotérmicas ya que, como mucho, se pueden limitar a dos o tres refrigeraciones y un recalentamiento, llegándose a alcanzar rendimientos del orden de un 28% a un 30% con recuperador, pero la instalación se complica tremendamente. En la Fig. 217 se representa un esquema de una turbina de gas con dos refrigeraciones en la compresión y un recalentamiento, con las etapas de expansión y compresión montadas sobre el mismo eje. Las turbinas y compresores se pueden instalar sobre el mismo eje, Fig. 217, o sobre dos ejes, Fig. 218, tantos como etapas en la 118 MANTENIMIENTO INDUSTRIAL turbina, por lo que existe más libertad a la hora de elegir las velocidades de rotación, y en consecuencia, en la disposición y construcción de las máquinas. Figura 217.- Esquema de una turbina de gas con tres escalonamientos de compresión con dos refrigeraciones, y dos etapas de expansión y un recalentamiento Figura 218.- Turbina de gas con tres escalonamientos de compresión y dos refrigeraciones, dos etapas de expansión con un recalentamiento y cogeneración, con las distintas etapas montadas sobre dos ejes En un motor de ciclo combinado, la cantidad considerable de calor que queda en los gases de escape de la turbina se dirige hacia una caldera denominada generador de vapor por recuperación de calor. El calor recuperado se usa para producir vapor, que alimenta una turbina de vapor asociada. El rendimiento combinado es un 50% mayor que el de la turbina de gas por sí sola. Hoy se instalan turbinas de ciclo combinado con una eficiencia térmica del 52% y más. Las turbinas de combustión se emplean para propulsar barcos y trenes. En los aviones se usa una forma modificada de la turbina de 119 MANTENIMIENTO INDUSTRIAL combustión, el turborreactor. En algunos países las turbinas de combustión pesadas, tanto de ciclo simple como combinado, ocupan un lugar importante en la generación de electricidad a gran escala. Es posible obtener una potencia por unidad superior a los 200 megavatios (MW), y la potencia de una turbina de ciclo combinado puede superar los 300 MW. Figura 219 Es común en el lenguaje cotidiano referirse a los motores de los aviones como turbinas, pero esto es un error conceptual, ya que éstos son turboreactores los cuales son máquinas que, entre otras cosas, contienen una turbina de gas. Figura 220.- Motor de compresor centrífugo de aviación 120 MANTENIMIENTO INDUSTRIAL Las turbinas de combustión emplean como combustible gas natural o líquidos como queroseno o gasoil. También puede usarse carbón, una vez transformado en gas en un gasificador aparte. La primera patente registrada para una turbina de gas la obtuvo en 1791 el inventor británico John Barber. Las turbinas a gas son comúnmente utilizadas para dar puntas de potencia en la gran mayoría de los sistemas interconectados del mundo. Este diseño responde muy rápidamente a aumentos de potencia, dado que sólo debe incrementarse la cantidad de combustible y aire ingresados a la turbina. La turbina de combustión presenta, respecto a otros tipos de motores térmicos, (turbina de vapor, motor Diesel, etc.), un cierto número de ventajas, como: a) Son instalaciones sencillas, en particular las de una línea de ejes sin recuperador b) Precisan de pequeños caudales de agua, (en algunos casos nulo), circunstancia favorable en instalaciones de países áridos c) Tienen una gran rapidez en la puesta en servicio con tiempos relativamente cortos, del orden de 10 a 20 minutos desde la parada a plena carga, según la potencia de la misma, mientras que para una turbina de vapor de 10 MW se necesitan 2 horas, y 4,5 horas para una de 25 MW d) Reducidos gastos de personal por su sencillo manejo e) Reducidos gastos de instalación por la ausencia de elementos auxiliares Elementos constructivos de la turbina de gas Una instalación de turbina de gas consta, en general, de compresor, turbina propiamente dicha, cámara de combustión, intercambiadores de calor, toberas, etc. La construcción de las turbinas de gas presenta algunas analogías con la de las turbinas de vapor, pero se diferencian en: a) Las presiones de los fluidos utilizados que son mucho más bajas b) Las temperaturas de funcionamiento que son sensiblemente más elevadas El apartado a favorece su construcción, ya que las paredes son más delgadas y las piezas menos pesadas, disminuyendo el precio para materiales idénticos. En cuanto a su funcionamiento, el aire que se toma de la atmósfera se comprime antes de pasar a la cámara de combustión, donde se mezcla con el combustible y se produce la ignición. Los gases calientes producto de la combustión se expansionan en la turbina, que acciona el eje del compresor y, frecuentemente, un alternador. 121 MANTENIMIENTO INDUSTRIAL Clasificación a- Atendiendo al flujo de gases en relación con el eje central: * Turbina axial: el aire fluye coaxialmente al eje de la máquina * Turbina radial: el aire fluye radialmente respecto al eje de la máquina b- Según la forma de montaje de la cámara de combustión y de la turbina de potencia: * Monoeje: cuando están montados sobre el mismo eje. * De dos ejes: cuando están montados sobre ejes distintos. Las máquinas axiales, ya sean compresores o turbinas, tienen mejores rendimientos que las radiales. Las axiales tienen una estructura más compleja y costosa que las radiales, predominando estas últimas entre las turbinas de gas de baja potencia. Las máquinas de gas axiales tienen una pequeña sección frontal, característica que interesa en el campo de la aviación para reducir la resistencia aerodinámica. La simplicidad constructiva, menor coste, mayor robustez y la facilidad de mantenimiento de las máquinas radiales frente a las axiales las hacen más competitivas en la gama de bajas potencias. En la turbina monoeje, el compresor y la turbina funcionan a la misma velocidad de giro. Cuando se precise una disminución en la velocidad de giro del eje de salida, el caudal de aire disminuirá, así como la presión de salida del compresor y, en consecuencia, la potencia y el par motor. Cuando se trate de accionar un alternador, para lo que se requiere una velocidad de giro en el eje constante, se mantendrá constante el caudal de aire y se podría regular la potencia desarrollada modificando únicamente la inyección de combustible en la cámara de combustión sin que varíe la velocidad de giro del rotor. La variación de la cantidad de combustible inyectado con caudal de aire sensiblemente constante modifica la temperatura de entrada a la turbina y, consecuentemente, el rendimiento de la máquina. En la turbina de dos ejes, la velocidad de giro del compresor es independiente de la de la turbina de potencia. Cuando se necesite una velocidad de giro del eje de salida menor, el compresor puede seguir girando a alta velocidad, poniendo a disposición de la turbina de potencia un caudal de gases, incluso, a mayor presión. Este tipo de máquinas es especialmente apto para aquellos casos en que se requiera un aumento del par motor a un reducido número de revoluciones. 122 MANTENIMIENTO INDUSTRIAL Figura 221.- Sección interior de algunas turbina de gas axiales 6.3.6. Válvulas Una válvula se puede definir como un aparato mecánico con el cual se puede iniciar, detener o regular la circulación (paso) de líquidos o gases mediante una pieza movible que abre, cierra u obstruye en forma parcial uno o más orificios o conductos. Las válvulas son unos de los instrumentos de control más esenciales en la industria. Debido a su diseño y materiales, las válvulas pueden abrir y cerrar, conectar y desconectar, regular, modular o aislar una enorme serie de líquidos y gases, desde los más simples hasta los más corrosivos o tóxicos. Sus tamaños van desde una fracción de pulgada hasta 30 ft (9 m) o más de diámetro. Pueden trabajar con presiones que van desde el vació hasta más de 20000 lb/in² (140 Mpa) y temperaturas desde las criogénicas hasta 1500 °F (815 °C). Las válvulas de baja presión suelen ser de latón, 123 MANTENIMIENTO INDUSTRIAL hierro fundido o plástico, mientras que las válvulas de alta presión son de acero fundido o forjado. En el caso de que el fluido sea corrosivo puede ser necesario emplear aleaciones, como acero inoxidable. Las válvulas pueden accionarse de forma manual, a través de un servomecanismo o mediante el flujo del propio fluido controlado. En algunas instalaciones se requiere un sellado absoluto; en otras, las fugas o escurrimientos no tienen importancia. Es difícil imaginarse una planta de productos químicos, refinería de petróleo, planta de procesamiento de alimentos, unidad de fabricación de fármacos, planta lechera, etc., sin válvulas, Una válvula se utiliza para controlar el flujo de un fluido en un tubo o en un dueto. El requisito de control puede ser de paso y corte, estrangulación (modulación del flujo), reducción de la presión del fluido, etc. Conforme avanza la tecnología y aumenta la capacidad de las plantas, han aumentado el tamaño y el costo de las válvulas y cada vez es más importante el máximo cuidado en su selección. El tipo de válvula dependerá de la función que debe efectuar, sea de cierre (bloqueo), estrangulación o para impedir el flujo inverso. Estas funciones se deben determinar después de un estudio cuidadoso de las necesidades de la unidad y del sistema para los cuales se destina la válvula. Hay incontables tipos de válvulas y cada una tiene una aplicación particular. Las válvulas se diseñan para funciones particulares y si se emplean en la forma correcta darán buen servicio durante largo tiempo. Sin embargo, en la práctica, se utilizan mal y varían las consecuencias. Alrededor del 50 % de las válvulas industriales se utiliza para servicio de paso y cierre, 40 % para estrangulación y 10 % son de retención. Hay muchas formas en las cuales controlan el flujo, con grados variables de exactitud. Dado que hay diversos tipos de válvulas disponibles para cada función, también es necesario determinar las condiciones del servicio en que se emplearán las válvulas. Es de importancia primordial conocer las características químicas y físicas de los fluidos que se manejan. Las características principales y los usos más comunes de los diversos tipos de válvulas para servicio de bloqueo o cierre son: Válvulas de compuerta: Resistencia mínima al fluido de la tubería. Se utiliza totalmente abierta o cerrada. Accionamiento poco frecuente. Válvulas de macho: Cierre hermético. Deben estar abiertas o cerradas del todo. 124 MANTENIMIENTO INDUSTRIAL Válvulas de bola: No hay obstrucción al flujo. Se utilizan para líquidos viscosos y pastas aguadas. Cierre positivo. Se utiliza totalmente abierta o cerrada. Válvulas de mariposa: Su uso principal es para cierre y estrangulación de grandes volúmenes de gases y líquidos a baja presión. Su diseño de disco abierto, rectilíneo, evita cualquier acumulación de sólidos; la caída de presión es muy pequeña. Las características principales y los usos más comunes para diversos tipos de válvulas para servicio de estrangulación son: Válvulas de globo: Son para uso poco frecuente. Cierre positivo. El asiento suele estar paralelo con el sentido del flujo; produce resistencia y caída de presión considerables. Válvulas de aguja: Estas válvulas son, básicamente, válvulas de globo que tienen un macho cónico similar a una aguja, que ajusta con precisión en su asiento. Se puede tener estrangulación exacta de volúmenes pequeños porque el orificio formado entre el macho cónico y el asiento cónico se puede variar a intervalos pequeños y precisos. Válvulas en Y: Las válvulas en Y son válvulas de globo que permiten el paso rectilíneo y sin obstrucción igual que las válvulas de compuerta. La ventaja es una menor caída de presión en esta válvula que en la de globo convencional. Válvulas de ángulo: Son, en esencia, iguales que las válvulas de globo. La diferencia principal es que el flujo del fluido en la válvula de ángulo hace un giro de 90º. Válvulas de mariposa: Su uso principal es para cierre y estrangulación de grandes volúmenes de gases y líquidos a baja presión (desde 150 psig hasta el vacío). Su diseño de disco abierto, rectilíneo evita acumulación de sólidos no adherentes y produce poca caída de presión. Las válvulas que no permiten el flujo inverso (de retención) actúan en forma automática ante los cambios de presión para evitar que se invierta el flujo. Hay disponible una selección especial de tipos de válvulas para manejar pastas aguadas gruesas o finas. Los tipos más comunes son en ángulo, fondo plano, macho, bola y diafragma y válvulas de opresión o compresión. Están diseñadas para mínima resistencia al flujo y, con frecuencia están revestidas con aleaciones especiales para darles resistencia a la corrosión o a la erosión. 125 MANTENIMIENTO INDUSTRIAL Figura 222.- Componentes de los diversos tipos de válvulas utilizadas en la industria de procesos 126 MANTENIMIENTO INDUSTRIAL Cualquiera que sea el tipo de válvula que se seleccione, todas tienen características comunes como: 1. Superficies correlativas que actúan como sellos para cortar el paso en la válvula. Esto suele requerir un sello fijo y uno movible. 2. Un componente que sobresale del cuerpo y que mueve el asiento movible, que suele ser el vástago. 3. Una empaquetadura o sello para el vástago para evitar pérdidas de fluido cuando el vástago sale del cuerpo de la válvula. 4. Un volante o aparato similar para ayudar en el movimiento del vástago. 5. Un conducto para paso del fluido por la válvula. La configuración del conducto define el tipo de control que se puede esperar. Figura 223 Categorías de válvulas Debido a las diferentes variables, no puede haber una válvula universal; por tanto, para satisfacer los cambiantes requisitos de la industria se han creado innumerables diseños y variantes con el paso de los años, conforme se han desarrollado nuevos materiales. Todos los tipos de válvulas recaen en nueve categorías: válvulas de compuerta, válvulas de globo, válvulas de bola, válvulas de mariposa, válvulas de apriete, válvulas de diafragma, válvulas de macho, válvulas de retención y válvulas de desahogo (alivio). Estas categorías básicas se describen a continuación. Sería imposible mencionar todas las características de cada tipo de válvula que se fabrica y no se ha intentado hacerlo. Más bien se presenta una descripción general de cada tipo en un formato general, se dan recomendaciones para servicio, aplicaciones, ventajas, desventajas y otra información útil para el lector. 127 MANTENIMIENTO INDUSTRIAL Válvulas de compuerta La válvula de compuerta es de vueltas múltiples, en la cual se cierra el orificio con un disco vertical de cara plana que se desliza en ángulos rectos sobre el asiento (fig. 224). Recomendada para • Servicio con apertura total o cierre total, sin estrangulación. • Para uso poco frecuente. • Para resistencia mínima a la circulación. • Para mínimas cantidades de fluido o liquido atrapado en la tubería. Aplicaciones • Servicio general, aceites y petróleo, gas, aire, pastas semilíquidas, líquidos espesos, vapor, gases y líquidos no condensables, líquidos corrosivos. Ventajas • Alta capacidad. • Cierre hermético. • Bajo costo. • Diseño y funcionamiento sencillos. • Poca resistencia a la circulación. Desventajas • Control deficiente de la circulación. • Se requiere mucha fuerza para accionarla. • Produce cavitación con baja caída de presión. • Debe estar cubierta o cerrada por completo. • La posición para estrangulación producirá erosión del asiento y del disco. 128 MANTENIMIENTO INDUSTRIAL Variaciones • Cuña maciza, cuña flexible, cuña dividida, disco doble. • Materiales • Cuerpo: bronce, hierro fundido, hierro, acero forjado, Monel, acero fundido, acero inoxidable, plástico de PVC. • Componentes diversos. Instrucciones especiales para instalación y mantenimiento • Lubricar a intervalos periódicos. • Corregir de inmediato las fugas por la empaquetadura. • Enfriar siempre el sistema al cerrar una tubería para líquidos calientes y al comprobar que las válvulas estén cerradas. • No cerrar nunca las llaves a la fuerza con la llave o una palanca. • Abrir las válvulas con lentitud para evitar el choque hidráulico en la tubería. • Cerrar las válvulas con lentitud para ayudar a descargar los sedimentos y mugre atrapados. Especificaciones para el pedido • Tipo de conexiones de extremo. • Tipo de cuña. • Tipo de asiento. • Tipo de vástago. • Tipo de bonete. • Tipo de empaquetadura del vástago. • Capacidad nominal de presión para operación y diseño. • Capacidad nominal de temperatura para operación y diseño. Válvulas de macho La válvula de macho es de ¼ de vuelta, que controla la circulación por medio de un macho cilíndrico o cónico que tiene un agujero en el centro, que se puede mover de la posición abierta a la cerrada mediante un giro de 90° (fig. 225). 129 MANTENIMIENTO INDUSTRIAL Recomendada para • Servicio con apertura total o cierre total. • Para accionamiento frecuente. • Para baja caída de presión a través de la válvula. • Para resistencia mínima a la circulación. • Para cantidad mínima de fluido atrapado en la tubería. Aplicaciones • Servicio general, pastas semilíquidas, líquidos, vapores, gases, corrosivos. • Ventajas • Alta capacidad. • Bajo costo. • Cierre hermético. • Funcionamiento rápido. Desventajas • Requiere alta torsión (par) para accionarla. • Desgaste del asiento. • Cavitación con baja caída de presión. Variaciones • Lubricada, sin lubricar, orificios múltiples. • Materiales • Hierro, hierro dúctil, acero al carbono, acero inoxidable, aleación 20, Monel, níquel, Hastelloy, camisa de plástico. Instrucciones especiales para instalación y mantenimiento • Dejar espacio libre para mover la manija en las válvulas accionadas con una llave. • En las válvulas con macho lubricado, hacerlo antes de ponerlas en servicio. • En las válvulas con macho lubricado, lubricarlas a intervalos periódicos. Especificaciones para pedido • Material del cuerpo. • Material del macho. • Capacidad nominal de temperatura. • Disposición de los orificios, si es de orificios múltiples. • Lubricante, si es válvula lubricada. 130 MANTENIMIENTO INDUSTRIAL Válvulas de globo Una válvula de globo es de vueltas múltiples, en la cual el cierre se logra por medio de un disco o tapón que sierra o corta el paso del fluido en un asiento que suele estar paralelo con la circulación en la tubería (fig. 226). Recomendada para • Estrangulación o regulación de circulación. • Para accionamiento frecuente. • Para corte positivo de gases o aire. • Cuando es aceptable cierta resistencia a la circulación. Aplicaciones • Servicio general, líquidos, vapores, gases, corrosivos, pastas semilíquidas. Ventajas • Estrangulación eficiente con estiramiento o erosión mínimos del disco o asiento. • Carrera corta del disco y pocas vueltas para accionarlas, lo cual reduce el tiempo y desgaste en el vástago y el bonete. • Control preciso de la circulación. • Disponible con orificios múltiples. Desventajas • Gran caída de presión. • Costo relativo elevado. Variaciones • Normal (estándar), en “Y”, en ángulo, de tres vías. 131 MANTENIMIENTO INDUSTRIAL Materiales • Cuerpo: bronce, hierro, hierro fundido, acero forjado, Monel, acero inoxidable, plásticos. • Componentes: diversos. Instrucciones especiales para instalación y mantenimiento • Instalar de modo que la presión este debajo del disco, excepto en servicio con vapor a alta temperatura. Registro en lubricación. • Hay que abrir ligeramente la válvula para expulsar los cuerpos extraños del asiento. • Apretar la tuerca de la empaquetadura, para corregir de inmediato las fugas por la empaquetadura. Especificaciones para el pedido • Tipo de conexiones de extremo. • Tipo de disco. • Tipo de asiento. • Tipo de vástago. • Tipo de empaquetadura o sello del vástago. • Tipo de bonete. • Capacidad nominal para presión. • Capacidad nominal para temperatura. Válvulas de bola Las válvulas de bola son de ¼ de vuelta, en las cuales una bola taladrada gira entre asientos elásticos, lo cual permite la circulación directa en la posición abierta y corta el paso cuando se gira la bola 90° y cierra el conducto (fig. 227). 132 MANTENIMIENTO INDUSTRIAL Recomendada para • Para servicio de conducción y corte, sin estrangulación. • Cuando se requiere apertura rápida. • Para temperaturas moderadas. • Cuando se necesita resistencia mínima a la circulación. Aplicaciones • Servicio general, altas temperaturas, pastas semilíquidas. Ventajas • Bajo costo. • Alta capacidad. • Corte bidireccional. • Circulación en línea recta. • Pocas fugas. • Se limpia por sí sola. • Poco mantenimiento. • No requiere lubricación. • Tamaño compacto. • Cierre hermético con baja torsión (par). Desventajas • Características deficientes para estrangulación. • Alta torsión para accionarla. • Susceptible al desgaste de sellos o empaquetaduras. • Propensa a la cavitación. Variaciones • Entrada por la parte superior, cuerpo o entrada de extremo divididos (partidos), tres vías, Venturi, orificio de tamaño total, orificio de tamaño reducido. Materiales • Cuerpo: hierro fundido, hierro dúctil, bronce, latón, aluminio, aceros al carbono, aceros inoxidables, titanio, tántalo, zirconio; plásticos de polipropileno y PVC. • Asiento: TFE, TFE con llenador, Nylon, Buna-N, neopreno. 133 MANTENIMIENTO INDUSTRIAL Instrucciones especiales para instalación y mantenimiento • Dejar suficiente espacio para accionar una manija larga. Especificaciones para el pedido • Temperatura de operación. • Tipo de orificio en la bola. • Material para el asiento. • Material para el cuerpo. • Presión de funcionamiento. • Orificio completo o reducido. • Entrada superior o entrada lateral. Válvulas de mariposa La válvula de mariposa es de ¼ de vuelta y controla la circulación por medio de un disco circular, con el eje de su orificio en ángulos rectos con el sentido de la circulación (fig. 228). Recomendada para • Servicio con apertura total o cierre total. • Servicio con estrangulación. • Para accionamiento frecuente. • Cuando se requiere corte positivo para gases o líquidos. • Cuando solo se permite un mínimo de fluido atrapado en la tubería. • Para baja ciada de presión a través de la válvula. Aplicaciones • Servicio general, líquidos, gases, pastas semilíquidas, líquidos con sólidos en suspensión. 134 MANTENIMIENTO INDUSTRIAL Ventajas • Ligera de peso, compacta, bajo costo. • Requiere poco mantenimiento. • Numero mínimo de piezas móviles. • No tiene bolas o cavidades. • Alta capacidad. • Circulación en línea recta. • Se limpia por sí sola. Desventajas • Alta torsión (par) para accionarla. • Capacidad limitada para caída de presión. • Propensa a la cavitación. Variaciones • Disco plano, disco realzado, con brida, atornillado, con camisa completa, alto rendimiento. Materiales • Cuerpo: hierro, hierro dúctil, aceros al carbono, acero forjado, aceros inoxidables, aleación 20, bronce, Monel. • Disco: todos los metales; revestimientos de elastómeros como TFE, Kynar, Buna-N, neopreno, Hypalon. • Asiento: Buna-N, viton, neopreno, caucho, butilo, poliuretano, Hypalon, Hycar, TFE. Instrucciones especiales para instalación y mantenimiento • Se puede accionar con palanca, volante o rueda para cadena. • Dejar suficiente espacio para el movimiento de la manija, si se acciona con palanca. • Las válvulas deben estar en posición cerrada durante el manejo y la instalación. Especificaciones para el pedido • Tipo de cuerpo. • Tipo de asiento. • Material del cuerpo. • Material del disco. • Material del asiento. 135 MANTENIMIENTO INDUSTRIAL • Tipo de accionamiento. • Presión de funcionamiento. • Temperatura de funcionamiento. Válvulas de diafragma Las válvulas de diafragma son de vueltas múltiples y efectúan el cierre por medio de un diafragma flexible sujeto a un compresor. Cuando el vástago de la válvula hace descender el compresor, el diafragma produce sellamiento y corta la circulación (fig. 229). Recomendada para • Servicio con apertura total o cierre total. • Para servicio de estrangulación. • Para servicio con bajas presiones de operación. Aplicaciones • Fluidos corrosivos, materiales pegajosos o viscosos, pastas semilíquidas fibrosas, lodos, alimentos, productos farmacéuticos. Ventajas • Bajo costo. • No tienen empaquetaduras. • No hay posibilidad de fugas por el vástago. • Inmune a los problemas de obstrucción, corrosión o formación de gomas en los productos que circulan. Desventajas • Diafragma susceptible de desgaste. • Elevada torsión al cerrar con la tubería llena. 136 MANTENIMIENTO INDUSTRIAL Variaciones • Tipo con vertedero y tipo en línea recta. • Materiales • Metálicos, plásticos macizos, con camisa, en gran variedad de cada uno. Instrucciones especiales para instalación y mantenimiento • Lubricar a intervalos periódicos. • No utilizar barras, llaves ni herramientas para cerrarla. Especificaciones para el pedido • Material del cuerpo. • Material del diafragma. • Conexiones de extremo. • Tipo del vástago. • Tipo del bonete. • Tipo de accionamiento. • Presión de funcionamiento. • Temperatura de funcionamiento. Válvulas de apriete La válvula de apriete es de vueltas múltiples y efectúa el cierre por medio de uno o más elementos flexibles, como diafragmas o tubos de caucho que se pueden apretar u oprimir entre sí para cortar la circulación (fig. 230). Recomendada para • Servicio de apertura y cierre. • Servicio de estrangulación. • Para temperaturas moderadas. • Cuando hay baja caída de presión a través de la válvula. • Para servicios que requieren poco mantenimiento. 137 MANTENIMIENTO INDUSTRIAL Aplicaciones • Pastas semilíquidas, lodos y pastas de minas, líquidos con grandes cantidades de sólidos en suspensión, sistemas para conducción neumática de sólidos, servicio de alimentos. Ventajas • Bajo costo. • Poco mantenimiento. • No hay obstrucciones o bolsas internas que la obstruyan. • Diseño sencillo. • No corrosiva y resistente a la abrasión. Desventajas • Aplicación limitada para vació. • Difícil de determinar el tamaño. Variaciones • Camisa o cuerpo descubierto; camisa o cuerpo metálicos alojados. Materiales • Caucho, caucho blanco, Hypalon, poliuretano, neopreno, neopreno blanco, Buna-N, Buna-S, Viton A, butilo, caucho de siliconas, TFE. Instrucciones especiales para instalación y mantenimiento • Los tamaños grandes pueden requerir soportes encima o debajo de la tubería, si los soportes para el tubo son inadecuados. Especificaciones para el pedido • Presión de funcionamiento. • Temperatura de funcionamiento. • Materiales de la camisa. • Camisa descubierta o alojada. Válvulas de retención (check) y de desahogo (alivio) Hay dos categorías de válvulas y son para uso específico, más bien que para servicio general: válvulas de retención (check) y válvulas de desahogo (alivio). Al contrario de los otros tipos descritos, son válvulas de accionamiento automático, 138 MANTENIMIENTO INDUSTRIAL funcionan sin controles externos y dependen para su funcionamiento de sentido de circulación o de las presiones en el sistema de tubería. Como ambos tipos se utilizan en combinación con válvulas de control de circulación, la selección de la válvula, con frecuencia, se hace sobre la base de las condiciones para seleccionar la válvula de control de circulación. 1. Válvulas de retención (check). La válvula de retención (fig. 231) está destinada a impedir una inversión de la circulación. La circulación del líquido en el sentido deseado abre la válvula; al invertirse la circulación, se cierra. Hay tres tipos básicos de válvulas de retención: 1) válvulas de retención de columpio, 2) de elevación y 3) de mariposa. 1.1. Válvulas de retención del columpio. Esta válvula tiene un disco embisagrado o de charnela que se abre por completo con la presión en la tubería y se cierra cuando se interrumpe la presión y empieza la circulación inversa. Hay dos diseños: uno en “Y” que tiene una abertura de acceso en el cuerpo para el esmerilado fácil del disco sin desmontar la válvula de la tubería y un tipo de circulación en línea recta que tiene anillos de asiento reemplazables. Recomendada para • Cuando se necesita resistencia mínima a la circulación. • Cuando hay cambios poco frecuentes del sentido de circulación en la tubería. • Para servicio en tuberías que tienen válvulas de compuerta. • Para tuberías verticales que tienen circulación ascendente. Aplicaciones • Para servicio con líquidos a baja velocidad. Ventajas • Puede estar por completo a la vista. • La turbulencia y las presiones dentro de la válvula son muy bajas. • El disco en “Y” se puede esmerilar sin desmontar la válvula de la tubería. Variaciones • Válvulas de retención con disco inclinable. 139 MANTENIMIENTO INDUSTRIAL Materiales • Cuerpo: bronce, hierro fundido, acero forjado, Monel, acero fundido, acero inoxidable, acero al carbono. • Componentes: diversos. Instrucciones especiales para instalación y mantenimiento • En las tuberías verticales, la presión siempre debe estar debajo del asiento. • Si una válvula no corta el paso, examinar la superficie del asiento. • Si el asiento está dañada o escoriado, se debe esmerilar o reemplazar. • Antes de volver a armar, limpiar con cuidado todas las piezas internas. 1.2. Válvulas de retención de elevación Una válvula de retención de elevación es similar a la válvula de globo, excepto que el disco se eleva con la presión normal e la tubería y se cierra por gravedad y la circulación inversa. Recomendada para • Cuando hay cambios frecuentes de circulación en la tubería. • Para uso con válvulas de globo y angulares. • Para uso cuando la caída de presión a través de la válvula no es problema. Aplicaciones • Tuberías para vapor de agua, aire, gas, agua y vapores con altas velocidades de circulación. Ventajas • Recorrido mínimo del disco a la posición de apertura total. • Acción rápida. 140 MANTENIMIENTO INDUSTRIAL Variaciones • Tres tipos de cuerpos: horizontal, angular, vertical. • Tipos con bola (esfera), pistón, bajo carga de resorte, retención para vapor. Materiales • Cuerpo: bronce, hierro, hierro fundido, acero forjado, Monel, acero inoxidable, PVC, Penton, grafito impenetrable, camisa de TFE. • Componentes: diversos. Instrucciones especiales para instalación y mantenimiento • La presión de la tubería debe estar debajo del asiento. • La válvula horizontal se instala en tuberías horizontales. • La válvula vertical se utiliza en tubos verticales con circulación ascendente, desde debajo del asiento. • Si hay fugas de la circulación inversa, examinar disco y asiento. 1.3. Válvula de retención de mariposa Una válvula de retención de mariposa tiene un disco dividido embisagrado en un eje en el centro del disco, de modo que un sello flexible sujeto al disco este a 45° con el cuerpo de la válvula, cuando esta se encuentra cerrada. Luego, el disco solo se mueve una distancia corta desde el cuerpo hacia el centro de la válvula para abrir por completo. Recomendada para • Cuando se necesita resistencia mínima a la circulación en la tubería. • Cuando hay cambios frecuentes en el sentido de la circulación. • Para uso con las válvulas de mariposa, macho, bola, diafragma o de apriete. Aplicaciones • Servicio para líquidos o gases. Ventajas • El diseño del cuerpo se presta para la instalación de diversos tipos de camisas de asiento. • Menos costosa cuando se necesita resistencia a la corrosión. • Funcionamiento rápido. • La sencillez del diseño permite construirlas con diámetros grandes. • Se puede instalar virtualmente en cualquier posición. 141 MANTENIMIENTO INDUSTRIAL Variaciones • Con camisa completa. • Con asiento blando. Materiales • Cuerpo: acero, acero inoxidable, titanio, aluminio, PVC, CPCB, polietileno, polipropileno, hierro fundido, Monel, bronce. • Sello flexible: Buna-N, Viton, caucho de butilo, TFE, neopreno, Hypalon, uretano, Nordel, Tygon, caucho de siliconas. Instrucciones especiales para instalación y mantenimiento • En las válvulas con camisa, esta se debe proteger contra daños durante el manejo. • Comprobar que la válvula queda instalada de modo que la abra la circulación normal. 2. Válvulas de desahogo (alivio). Una válvula de desahogo (fig. 232) es de acción automática para tener regulación automática de la presión. El uso principal de esta válvula es para servicio no comprimible y se abre con lentitud conforme aumenta la presión, para regularla. La válvula de seguridad es similar a la válvula de desahogo y se abre con rapidez con un “salto” para descargar la presión excesiva ocasionada por gases o líquidos comprimibles. El tamaño de las válvulas de desahogo es muy importante y se determina mediante formulas especificas. Recomendada para • Sistemas en donde se necesita una gama predeterminada de presiones. 142 MANTENIMIENTO INDUSTRIAL Aplicaciones • Agua caliente, vapor de agua, gases, vapores. Ventajas • Bajo costo. • No se requiere potencia auxiliar para la operación. Variaciones • Seguridad, desahogo de seguridad. • Construcción con diafragma para válvulas utilizadas en servicio corrosivo. Materiales • Cuerpo: hierro fundido, acero al carbono, vidrio y TFE, bronce, latón, camisa de TFE, acero inoxidable, Hastelloy, Monel. • Componentes: diversos. Instrucciones especiales para instalación y mantenimiento • Se debe instalar de acuerdo con las disposiciones del Código ASME para recipientes de presión sin fuego. • Se debe instalar en lugares de fácil acceso para inspección y mantenimiento. 6.3.7. Motores eléctricos Un motor eléctrico es una máquina eléctrica que transforma energía eléctrica en energía mecánica por medio de interacciones electromagnéticas. Algunos de los motores eléctricos son reversibles, pueden transformar energía mecánica en energía eléctrica funcionando como generadores. Los motores eléctricos de tracción usados en locomotoras realizan a menudo ambas tareas, si se los equipa con frenos regenerativos. Son ampliamente utilizados en instalaciones industriales, comerciales y particulares. Pueden funcionar conectados a una red de suministro eléctrico o a baterías. Así, en automóviles se están empezando a utilizar en vehículos híbridos para aprovechar las ventajas de ambos. 143 MANTENIMIENTO INDUSTRIAL Los motores, son las máquinas auxiliares de una máquina principal. La máquina principal produce un trabajo con el auxilio de uno o varios motores. Los motores eléctricos, se paran o se ponen en funcionamiento, obedeciendo a un mando manual o un programa preestablecido. Se detienen cuando se alcanza un nivel, o se ponen en marcha en el momento que un mecanismo está en una determinada posición. La puesta en marcha, o parada, de estos motores auxiliares, está controlados por los sensores o elementos de detección. Principio de funcionamiento El principio de la inducción de Faraday, científico británico, establece que el movimiento de un conductor integrante de un circuito cerrado en un campo magnético produce corriente en dicho circuito, y en ello se basa el funcionamiento del generador eléctrico. Pero, recíprocamente, una corriente eléctrica que pasa por un conductor situado en un campo magnético crea una fuerza que tiende a desplazar al conductor con respecto al campo, y esta es la base del motor eléctrico. De modo que, en esencia, una misma máquina puede emplearse como generador o como motor; si se le aplica energía mecánica, generará electricidad, y si se le aplica electricidad, producirá energía mecánica. Los motores de corriente alterna y los motores de corriente continua se basan en el mismo principio de funcionamiento, el cual establece que si un conductor por el que circula una corriente eléctrica se encuentra dentro de la acción de un campo magnético, éste tiende a desplazarse perpendicularmente a las líneas de acción del campo magnético. El conductor tiende a funcionar como un electroimán debido a la corriente eléctrica que circula por el mismo adquiriendo de esta manera propiedades magnéticas, que provocan, debido a la interacción con los polos ubicados en el estator, el movimiento circular que se observa en el rotor del motor. Partiendo del hecho de que cuando pasa corriente por un conductor produce un campo magnético, además si lo ponemos dentro de la acción de un campo magnético potente, el producto de la interacción de ambos campos magnéticos hace que el conductor tienda a desplazarse produciendo así la energía mecánica. Dicha energía es comunicada al exterior mediante un dispositivo llamado flecha. 144 MANTENIMIENTO INDUSTRIAL En un motor eléctrico: - La potencia nominal es la potencia de salida, esto es, la potencia mecánica en el eje del motor; la potencia nominal PN es expresado generalmente en Kw, cv o eventualmente en H.P. La potencia (eléctrica) de entrada dada generalmente en Kw, es igual a la potencia nominal (en Kw) dividida por el rendimiento del motor (h). - La corriente nominal de los motores de corriente alterna está dada por las siguientes relaciones: • Monofásicos: • Trifásicos: Siendo: VN = Tensión nominal de línea del motor en (V), cosφN = Factor de potencia nominal. - La corriente nominal de los motores de corriente continua está dada por la siguiente relación La corriente consumida por un motor varía bastante con las circunstancias. En la mayoría de los motores, la corriente en el instante de la partida, corriente de arranque, Ia es muy elevada (se puede tener Ia/IN con valores superiores a 8), cayendo gradualmente (en algunos segundos) con el aumento de la velocidad hasta los valores nominales. Ventajas En diversas circunstancias presenta muchas ventajas respecto a los motores de combustión: • A igual potencia, su tamaño y peso son más reducidos. • Se pueden construir de cualquier tamaño. 145 MANTENIMIENTO INDUSTRIAL • Tiene un par de giro elevado y, según el tipo de motor, prácticamente constante. • Su rendimiento es muy elevado (típicamente en torno al 75%, aumentando el mismo a medida que se incrementa la potencia de la máquina). • Este tipo de motores no emite contaminantes, aunque en la generación de energía eléctrica de la mayoría de las redes de suministro se emiten contaminantes. Tipos de motores eléctricos Dependiendo del tipo de corriente a utilizar y de las características de construcción los motores se clasifican como se resume en la tabla 55. TABLA 55 146 MANTENIMIENTO INDUSTRIAL Los tipos más usuales de motores eléctricos son: a) Motores de corriente continua.- Son motores de costo elevado y necesitan una fuente de corriente continua y rectificada; pueden funcionar con velocidades ajustables entre limites amplios y se prestan a controles de gran flexibilidad y precisión; su uso está restringido a aplicaciones en que esas propiedades son exigidas como es el caso de tracción eléctrica, procesos automáticos de producción, etc. b) Motores de corriente alterna.- Son los más usados, toda vez que la distribución de energía eléctrica es normalmente hecha en corriente alterna, los motores pueden ser: - Síncronos: Funcionan con velocidad fija, utilizados para grandes potencias (debido a su alto costo en tamaños menores) o cuando se necesita de velocidad constante; gracias a su factor de potencia elevada y variable es también usado en la corrección de factor de potencia, necesita de una fuente de corriente continua o rectificada para su excitación además de exigir un equipamiento de control complejo. - De inducción: Que funcionan con velocidad prácticamente constante, variado ligeramente con la carga mecánica aplicada a su eje debido a su gran simplicidad robusta y bajo costo, es el motor utilizado (principalmente la jaula de ardilla), siendo adecuada para casi todos los tipos de maquinas. c) Motores universales.- También llamamos diasíncronos, funcionan con corriente continua o alterna y tienen su aplicación típica en los aparatos electrodomésticos. Figura 235 147 MANTENIMIENTO INDUSTRIAL MOTORES DE CORRIENTE ALTERNA 1.- Motor asíncrono trifásico Son los más utilizados en la industria por su sencillez, y fácil o casi nulo mantenimiento. El motor asíncrono trifásico es una máquina eléctrica que funciona en cualquier posición, lo que le hace adaptable a todo uso. El principio de funcionamiento se basa en los fenómenos de inducción electromagnética. Poseen un buen par de arranque y consiguen mantener su velocidad bastante estable para diferentes regímenes de carga. Su velocidad depende de la frecuencia que se le aplica y del número de polos que forma su bobinado. Por lo tanto, la forma de regular la velocidad de giro consiste en alimentarlos a través de variadores electrónicos de frecuencia o conmutadores de polos. Dependiendo del tipo de rotor que utilicen, existen dos tipos fundamentales: • Motores de rotor en cortocircuito o jaula de ardilla y • Motores de rotor bobinado. 148 MANTENIMIENTO INDUSTRIAL Funcionamiento del motor asíncrono trifásico Si se dispone de un imán en forma de U, de tal forma que pueda girar por su eje central mediante una manivela (figura 238). Muy próximo a los polos se sitúa un disco de material conductor (cobre o aluminio), de tal forma que también pueda girar. Cuando sé hacer girar el imán permanente se puede observar que el disco también gira, pero a un poco menos velocidad que el imán. El imán, en su giro, hace que las líneas de campo magnético que atraviesan el disco sean variables (movimiento relativo del campo magnético frente a un conductor eléctrico fijo), por lo que según el principio de inducción electromagnética (ley de Faraday) en el disco se induce una f.e.m. que, al estar en cortocircuito, hace que aparezcan unas corrientes eléctricas por el mismo. Al estar estas corrientes eléctricas inmersas en el campo magnético del imán, se originan en el disco un par de fuerzas que ponen el disco en movimiento, siguiendo al campo magnético. El disco puede ser lo mismo de cobre como de aluminio pero nunca puede alcanzar la misma velocidad de giro que el imán, ya que si ocurriese esto, el movimiento relativo de ambos se anularía y el campo magnético dejaría de ser variable, por lo que desaparecería la f.e.m. inducida y con ella el par de fuerzas. Si se consigue crear un campo giratorio aprovechando las variaciones de corriente de un sistema de corriente alterna trifásica, como el desarrollado por el imán de la experiencia anterior, se podrá hacer girar el roto de un motor asíncrono. En el estator se alojan tres bobinas desfasadas entre sí 120º. Cada una de estas bobinas se conecta a cada una de las fases de un sistema trifásico, por lo que por cada una de ellas circularán las corrientes instantáneas i1 i2 e i3 (figura 239). Analizando los 149 MANTENIMIENTO INDUSTRIAL valores que alcanza el flujo magnético creado por cada una de estas corrientes en cada instante del tiempo, se comprueba que se genera un campo magnético de carácter giratorio. Para el instante (0) la corriente de una fase es cero la segunda fase posee un valor positivo y la tercera negativo, Io que provoca un campo magnético instantáneo del sentido marcado por la flecha de la figura 5 (0). En el punto (1), la segunda fase es cero mientras que la fase una es positiva y creciendo de valor la tercera fase sigue siendo negativa pero decreciente en valor, en la postura 2 la tercera fase ha llegado a cero, mientras que la fase uno es positiva pero comienza a disminuir de valor la segunda fase ahora es negativas y aumentando de valor, el valor predominante de los polos ha hechos que el campo magnético haya pasado del punto (0) al (2) girando cada vez un sexto del 150 MANTENIMIENTO INDUSTRIAL total positiva, por lo que, tal como se puede observar en la figura 240, el campo magnético ha avanzado 1/6 de ciclo. Si se sigue estudiando punto por punto, se llaga al punto (6) donde comienza de nuevo el ciclo del campo giratorio, que en este caso avanza a la misma velocidad angular que el de la pulsación de la corriente. La velocidad del campo giratorio depende del número de polos que se consigan al realizar los devanados en el estator. En la explicación se ha empleado un devanado de un par de polos. Por lo que la velocidad conseguida por el campo giratorio coincide con la pulsación angular, es decir: w = 2πf (radianes/segundo) = 60 f (revoluciones por segundo) Si se dispone un bobinado con dos pares de polos se necesitarán dos ciclos completos para conseguir una revolución completa del campo giratorio, por lo que la expresión general de la velocidad del mismo podría quedar así: n = nº de revoluciones por minuto (r.p.m.) f = frecuencia de la red en Hz p = nº de pares de polos Así, por ejemplo, con un par de polos en una frecuencia de 50 Hz se consigue una velocidad del campo giratorio de: Para dos pares de polos se consigue la mitad de revoluciones, es decir 1500 r.p.m. 151 MANTENIMIENTO INDUSTRIAL a.- Motor asíncrono de rotor en cortocircuito En el estator de estos motores se disponen las bobinas encargadas de producir el campo magnético giratorio; estas se alojan en ranuras practicadas en un núcleo formado, por lo general, por paquetes de chapa magnética. En la figura 241, puede verse un estator en su carcasa y fuera de la carcasa. Las seis puntas de las bobinas se llevan a los bornes de conexión, para que puedan conectarse en estrella o en triángulo. El rotor está formado por conductores de aluminio alojados en las ranuras del núcleo y cortocircuitados por sus extremos mediante unos anillos (figura 242). A este rotor también se le da el nombre de jaula de ardilla por la semejanza a ese objeto. En motores de pequeña potencia, el rotor se construye fundiendo en un bloque integral unas varillas de aluminio junto con los anillos. Su funcionamiento es como sigue: Al ser recorridas las bobinas del estator por un sistema de corrientes trifásicas, se origina un campo magnético giratorio que, al 152 MANTENIMIENTO INDUSTRIAL cortar los conductores del rotor, induce en ellos una f.e.m. y que, al estar estos en cortocircuito, provoca la circulación de una corriente por dichos conductores. La interacción de las corrientes rotóricas con el campo magnético del estator da lugar a un par motor que hace girar el rotor en el mismo sentido que el campo magnético. La velocidad del rotor nunca se puede alcanzar a la del campo giratorio, ya que de ser estas iguales no se induciría tensión alguna en el rotor, por lo que el rotor siempre gira a una velocidad inferior a la de sincronismo (de ahí viene el nombre de asíncrono). De esta forma, se define el deslizamiento de un motor asíncrono, como la diferencia de estas velocidades expresada en tantos por ciento: S = deslizamiento en % ns = velocidad teórica n = velocidad real Así, por ejemplo, el deslizamiento de un motor asíncrono que posea una velocidad de sincronismo de 1500 r.p.m. y que gire a plena carga a una velocidad de 1470, tendrá un deslizamiento de: Cuando el motor trabaja en vacío, el deslizamiento es mínimo (aproximadamente el 0,1 %). Al arrastrar la carga nominal, el motor tiende a frenarse y el deslizamiento aumenta un poco (del orden del 4 %). Hay que pensar que el par de fuerzas que se desarrolla en el rotor depende de la corriente que por éste circule, y esta fuerza depende, a su vez, de la f.e.m. inducida en los conductores del mismo. Por esto cuanto mayor sea el esfuerzo a realizar por el motor, el rotor tenderá a frenarse (aumento del deslizamiento y del movimiento relativo del campo magnético respecto a los conductores del rotor), para conseguir una mayor f.e.m. inducida y, por tanto, una mayor corriente rotórica y, en definitiva, un mayor par de fuerzas. 153 MANTENIMIENTO INDUSTRIAL Conexión de un motor de un motor asíncrono trifásico El devanado trifásico del estator de un motor asíncrono se puede conectar en estrella o en triángulo, dependiendo de la tensión de la red y la que se indique en la placa de características del motor. Todos los motores trifásicos pueden funcionar a dos tensiones diferentes. Así, por ejemplo, en un motor que en su placa de características aparezcan las tensiones: 380/220 V, indica que se puede conectar en estrella a la tensión mayor (380) o en triángulo la tensión menor (220). El nuevo reglamento de baja tensión, ha subido estas tensiones a 400/230 V, así que en la actualidad, todos los motores que ya estaban instalados lo hacen ahora a una tensión más elevada, y seguirán así durante bastante tiempo, mientras que no se quemen seguirán trabajando. Cuando se quemen, la solución no será rebobinarlos sino sustituirlos por motores a la nueva tensión nominal de 400/230 V. 154 MANTENIMIENTO INDUSTRIAL En la figura 243, se muestra la disposición en que se adopta para las puntas de bobinas en la caja de bornes del motor. Cambiando las tres chapitas de puentes, el motor queda conectado en estrella (tensión mayor), o en triángulo (tensión menor). Para conseguir la conexión en estrella, se unen los finales X-Y-Z. La conexión en triángulo se realizar con facilidad al unir los terminales (U-X), (V-Y), (W-Z). En la conexión Estrella, si se prefiere conectar las tres fases por debajo, bastará con colocar el puente en los tres bornes de arriba, ya que la nomenclatura U V W, X Y Z, es relativa, dependiendo por donde entre la corriente. Por esta razón estas letras no parecen en el bornero del motor. Funcionamiento en servicio del motor de rotor en cortocircuito Arranque Al conectar las bobinas del estator de un motor trifásico, permaneciendo el rotor sin movimiento, en un principio, el campo giratorio corta los conductores del rotor induciendo en los mismos, como si fuese un transformado, una f.e.m. elevada (de la misma frecuencia que la del estator), que a su vez, producirá una fuerte corriente (puede llegar a ser de cientos de amperios). Estas corrientes, al interactuar con el campo magnético, producen elevadas fuerzas mecánicas que, al actuar sobre el rotor, le proporcionan un fuerte par de arranque. Al igual que ocurre con los transformadores (el estator actúa como el primario y el rotor como el secundario); la fuerte corriente del rotor genera, a su vez, un campo magnético que intenta modificar el flujo común. Como éste sólo depende de la tensión aplicada al estator, aparece un incremento de corriente en el mismo que intenta compensar la f.e.m. producida por el rotor. De esta forma, cuando aumenta la intensidad rotórica también lo hace la corriente estatórica, que corresponde a la corriente tomada de la red por el motor. En el arranque se produce, por tanto, una elevación de la corriente absorbida por el motor de la red, que, como se verá más adelante, a veces conviene suavizar. Aceleración y carga Tan pronto empieza a circular corriente por el rotor parado, éste empieza a girar con un movimiento acelerado y en el mismo sentido que el campo giratorio, por lo que el movimiento relativo entre el campo y el rotor disminuye y con él, la f.e.m. Inducida y la corriente (según disminuye el deslizamiento, la frecuencia del rotor f2 va también disminuyendo), si el motor está vacío, rápidamente se alcanza una velocidad muy próxima a la de sincronismo. Si se aplica una carga mecánica resistente al eje del motor, el rotor tenderá a perder velocidad hasta alcanzar un equilibrio entre el par motor creado por el mismo y el par resistente ofrecido por la carga. Si se aplica una carga mecánica resistente que sobrepase el par máximo que puede proporcionar el motor, éste tiende a pararse. Esto siempre debe de evitarse, ya 155 MANTENIMIENTO INDUSTRIAL que al estar el rotor bloqueado, tanto las corrientes rotóricas como las estatóricas se elevan muchísimo, pudiendo provocar la destrucción del motor si no se le desconecta rápidamente. Se puede decir que el motor intenta desarrollar un par motriz exactamente igual al par opuesto por el resistente de la carga. b.- Motor asíncrono de rotor bobinado o de anillos rozantes En estos motores, el estator posee las mismas características que el del motor de rotor en cortocircuito, pero el rotor se construye insertando un devanado trifásico en las ranuras de un núcleo cilíndrico de chapas magnéticas. Este devanado se conecta normalmente en estrella y los tres terminales restantes se conectan a tres anillos rozantes. Unas escobillas frotan estos anillos y permiten conectar unas resistencias externas en serie con el fin de poder limitar la corriente rotórica (figura 244). En la placa de características de estos motores aparecen tres nuevos terminales correspondientes al bobinado del rotor, que para no confundirlos con los del estator se indican con las letras minúsculas u, v, w. El principio de funcionamiento es exactamente igual que el del rotor en cortocircuito, pero ahora es posible la regulación directa de la corriente rotórica y con ella, la propia corriente del estator. 156 MANTENIMIENTO INDUSTRIAL Este sistema tiene la ventaja de que no es necesario disminuir la tensión en el estator para disminuir el flujo y, con él, la corriente rotórica, que siempre trae consigo una reducción del par motor. El arranque se hace en sucesivos escalones, obteniendo un arranque con corriente suave en el estator con un buen valor de las resistencias rotóricas, con el par máximo. El gran inconveniente que presentan estos motores frente a los de jaula de rotor en cortocircuito es que resultan bastante más caros y necesitan de un mayor mantenimiento. En la actualidad el control electrónico de los motores asíncronos de rotor en cortocircuito ha desplazado en casi todas las aplicaciones al motor de rotor bobinado, quedando este último para casos especiales donde se requiera un par de arranque muy elevado (grúas, instalaciones de media tensión, etc.). Los motores de rotor bobinado llevan reóstato de arranque (figura 245) para poner todas las resistencias en serie con el devanado del inducido. Conforme adquiere velocidad se quitan resistencias, hasta poner en corto circuito las tres puntas de la estrella del rotor, en este momento se puede levantar las escobillas del rotor, y evitar el desgaste por el roce, al manipular el volante que alzan las escobillas, al 157 MANTENIMIENTO INDUSTRIAL mismo tiempo entran tres cuchillas que ponen en corto el bobinado en estrella del rotor. Cuando se para el motor, se vuelven a bajar las escobillas y se coloca el reóstato de arranque en la posición de inicio para la próxima arrancada. Si no se hace esta operación, cuando se ponga en marcha de nuevo, el motor arranca normalmente, lo único que sucede es que consume igual que un motor de jaula de ardilla durante el tiempo de arranque. 2.- Motor monofásico de inducción de rotor en cortocircuito Debido a la sencillez, robustez, bajo precio y a la ausencia de chispas, los motores de campo giratorio se construyen también para corriente alterna monofásica. Se utilizan en aquellas instalaciones donde no se dispone de suministro trifásico, como por ejemplo, aplicaciones domésticas (figura 246). Al igual que los trifásicos, están constituidos por un rotor de jaula de ardilla y un estator donde se alojarán los devanados inductores. Existiendo distintos tipos de monofásicos: De fase partida, con condensador de arranque, o con espira en cortocircuito. a.- Motor de fase partida En este sistema el estator tiene un bobinado monofásico que al ser sometido a una tensión alterna senoidal, crea un campo magnético alternativo y fijo, que no es capaz de provocar un par de arranque efectivo en el rotor (figura 247). Si en estas condiciones se empuja el rotor manualmente en uno de los sentidos posibles, se consigue desplazar el eje del campo magnético del rotor y el motor comenzará a girar hasta alcanzar la velocidad nominal. El sentido de giro del motor depende de hacia dónde se haya iniciado el giro, y su velocidad, del número de pares de polos del devanado. 158 MANTENIMIENTO INDUSTRIAL Para conseguir que el motor arranque automáticamente se inserta en las ranuras del estator un segundo bobinado auxiliar que ocupe 1/3 de las mismas. En la figura 248 se muestra un esquema de la disposición de los dos bobinados con un interruptor centrífugo, o un pulsador manual. Como la impedancia de las dos bobinas es diferente, se producirá un pequeño ángulo de desfase en la corriente absorbida por el bobinado auxiliar respecto a la del principal. Este ángulo suele ser de adelanto debido a que el bobinado auxiliar es de menor sección y, por lo tanto, más resistivo. El flujo que produce dicha bobina queda también adelantado al principal, lo que hace que se forme un campo giratorio suficiente para impulsar a moverse al rotor. Dado que el ángulo de desfase entre ambos flujos resulta muy pequeño, el par de arranque también es muy pequeño, si se arranca en carga, puede que no gire y se queme el bobinado de arranque. 159 MANTENIMIENTO INDUSTRIAL b.- Motor con condensador de arranque Para aumentar el par de arranque de estos motores se añade un condensador en serie con el bobinado auxiliar, de tal forma que el ángulo de desfase entre los flujos producidos por ambas bobinas se acerque a 90º. El par de arranque conseguido será mayor, cuanto mayor sea la capacidad del condensador. Sin embargo, una capacidad excesivamente elevada del condensador puede reducir la impedancia total del devanado auxiliar a valores muy pequeños, lo que trae consigo un aumento de la corriente absorbida por el bobinado auxiliar. Si este devanado no se desconecta una vez arrancado el motor, el calor producido por la fuerte corriente puede llegar a destruirlo. Para que esto no ocurra, una vez que el motor haya alcanzado unas ciertas revoluciones, se procede a la desconexión del conjunto formado por el condensador y el devanado auxiliar. Dicha desconexión se puede realizar mediante un interruptor centrífugo (figura 249). Interruptor que está acoplado al eje del motor y que abre sus contactos cuando se alcanzan unas ciertas revoluciones, en otros motores como piedras de amolar el interruptor automático se sustituye por un pulsador manual. En el caso de que el condensador se desee dejar continuamente conectado, éste deberá poseer una potencia reactiva 1'3 KVAR por cada KW de potencia del motor. Para motores que sea muy importante el par de arranque y que se desconecte el bobinado auxiliar, el condensador deberá de ser de unos 4 KVAR por cada KW de potencia del motor (figura 250). 160 MANTENIMIENTO INDUSTRIAL Los motores con condensador poseen un buen factor de potencia y un rendimiento aceptable (es inferior al de los motores trifásicos) y se aplican, por ejemplo, para electrodomésticos, máquinas herramientas, bombas, etc. En los motores sin condensador el campo de aplicación se ve limitado por su bajo par de arranque, por lo que se emplean, por ejemplo, para ventiladores, bombas centrífugas, etc. Inversión de giro en el motor monofásico Para invertir el giro de los motores monofásicos es suficiente con invertir la conexión de una de las dos bobinas (figura 251). 161 MANTENIMIENTO INDUSTRIAL c.- Motores monofásicos con espira en cortocircuito Este motor es de muy sencilla construcción y se aplica para motores de pequeñas potencias (hasta 100 o 200 W). El rotor de estos motores es de jaula de ardilla. El estator es de polos salientes, en el cual se arrolla la bobina principal como si fuese el primario de un transformador. En la parte extrema de cada polo se coloca una espira de cobre en cortocircuito (fig. 252). El devanado principal produce un campo magnético alternativo que atraviesa el rotor y las dos espiras en cortocircuito. En estas espiras se induce una pequeña corriente y un pequeño flujo que queda retrasado respecto al flujo Inversión de giro El sentido de giro de los motores con espira en cortocircuito depende de la disposición de las espiras de cortocircuito, por lo que la inversión del giro, solo es posible si se puede desmontar y cambiar la posición del rotor dentro del estator (figura 253). 162 MANTENIMIENTO INDUSTRIAL MOTORES DE CORRIENTE CONTINUA Los motores de corriente continua presentan el inconveniente de que sólo pueden ser alimentados a través de equipos que conviertan la corriente alterna suministrada por la red de corriente alterna en corriente continua. Por otro lado, su constitución es mucho más compleja que los de C.A. y necesitan de colectores con delgas y escobillas para su funcionamiento, que aumentan considerablemente los trabajos de mantenimiento. En contrapartida, poseen un par de arranque elevado y su velocidad se puede regular con facilidad entre amplios límites, lo que les hace ideales para ciertas aplicaciones: tracción eléctrica (tranvías, trenes, coches eléctricos, etc.) y en todas aquéllas en que sea muy importante el control y la regulación de las características funcionales del motor. Principio de funcionamiento Como todos los motores eléctricos, su funcionamiento se basa en las fuerzas que aparecen en los conductores cuando son recorridos por corrientes eléctricas y, a su vez, están sometidos a la acción de un campo magnético. En la figura 254 se ha representado el aspecto de un motor de corriente continua elemental. Los polos magnéticos del imán, situados siempre en el estator, son los encargados de producir el campo magnético inductor. La espira, que se ha situado en el rotor, es recorrida por una corriente continua que se suministra a través de un anillo de cobre cortado por la mitad (colector de delgas). Las dos mitades se aíslan eléctricamente y se sitúa sobre ellas unos contactos deslizantes de carbón (escobillas), de tal forma que la corriente aplicada por la fuente de alimentación pueda llegar a los conductores del rotor. Como las corrientes que circulan por ambos lados de la espira son contrarias, al aplicar la regla de la mano izquierda, se comprueba que aparecen fuerzas también contrarias en cada lado activo de la espira, lo que determina un par de giro. 163 MANTENIMIENTO INDUSTRIAL Para que el sentido de giro sea siempre el mismo, el par de fuerzas siempre deberá actuar en el mismo sentido. En el caso de que los conductores de la espira girasen hasta enfrentarse con el polo contrario, con el mismo sentido de corriente que en la anterior posición, la fuerza se invertiría de sentido y la espira no establecería nunca una revolución. Con el colector de delgas se resuelve este problema, haciendo que la corriente siempre circule en el mismo sentido respecto al campo magnético, el colector actúa como un rectificador. Para conseguir que el motor gire en uno o en otro sentido, hay que lograr invertir el sentido del par de fuerzas. Esto se consigue invirtiendo el sentido de la corriente del rotor y manteniendo el campo magnético inductor fijo. Constitución La constitución de motor de C.C. es exactamente igual que la de un generador de corriente C.C. (dinamo). Esta máquina es reversible y, por lo tanto, puede funcionar indistintamente corno motor o como generador. Se necesitan de tres partes fundamentales para su funcionamiento; Un circuito que produzca el campo magnético (circuito inductor), un circuito que al ser recorrido por la corriente eléctrica desarrolle pares de tuerza que pongan en movimiento el rotor (circuito inducido) y un colector de delgas con escobillas. 164 MANTENIMIENTO INDUSTRIAL En la figura 256 se muestra, en corte, el aspecto de un motor de corriente continua y en la figura 257 la disposición del porta escobillas. Estator En el estator se sitúa el circuito inductor. Consta de una envolvente de acero laminado o hierro forjado, llamado culata o yugo, donde se sitúan los núcleos correspondientes a los polos principales y en los que se arrolla el bobinado encargado de producir el campo magnético de excitación. Alimentando con corriente continua, a estas bobinas se consiguen campos magnéticos más intensos que con imanes permanentes. Aparte de los polos principales, también se suelen incorporar en la culata unas pequeñas piezas polares, con sus consiguientes devanados, conocidas por el nombre de polos auxiliares o de conmutación (figura 261). Estos polos evitan los efectos perjudiciales producidos por la reacción del inducido. 165 MANTENIMIENTO INDUSTRIAL En la actualidad, existen motores con imanes permanentes en lugar de electroimanes en la excitación, lo que simplifica considerablemente a los mismos. Rotor Para que los pares de fuerza originados en los conductores del rotor, al ser recorridos por la corriente, sean aplicados de una forma uniforme en el rotor, los conductores se reparten uniformemente por el núcleo rotórico. El núcleo del circuito inducido se construye con una pieza cilíndrica formada con chapas magnéticas apiladas para evitar las pérdidas por histéresis y Foucault. A lo largo de este núcleo se practican ranuras para aislar los conductores aislados del circuito inducido. Colector y escobillas El colector consta de varias delgas de cobre electrolítico con el fin de poder conectar a él los diferentes circuitos del inducido. Estas conexiones se llevan a cabo por soldadura blanda (estaño). Las delgas se aíslan entre sí por separadores de micanita. Las escobillas transmiten la corriente al inducido a través de su frotamiento con el colector. Se suelen fabricar de carbón puro o de grafito. Van montadas sobre unas portaescobillas en los que se puede regular la presión. Para un correcto enclavamiento, las escobillas deben apoyar sobre las delgas del colector con toda su superficie (a veces, es necesario lijarlas para conseguirlo). Dada la fricción a la que se somete a las escobillas, éstas poseen una vida limitada. Una de las tareas de mantenimiento fundamentales de un motor de corriente continua es reponer las escobillas desgastadas y limpiar las delgas del colector (En la figura 258, se aprecia el desgaste del colector, producido por unas escobillas demasiado duras). Reacción del inducido Cuando los conductores del inducido son recorridos por una corriente eléctrica, producen un campo magnético cuya dirección y sentido se obtiene aplicando la regla del sacacorchos. 166 MANTENIMIENTO INDUSTRIAL La dirección de este campo transversal de reacción adquiere la misma dirección que el eje de las escobillas, con lo que resulta ser perpendicular al campo principal producido por los polos inductores (figura 260-1). El campo transversal ΦT debido a la reacción del inducido se suma vectorialmente al campo principal ΦP, dando como fruto un campo magnético resultante ΦR que queda desviado de la posición original (figura 260-2). Esta desviación del campo inductor produce una serie de problemas cuando las escobillas conmutan de una delga a la delga contigua que se manifiesta en forma de chispas que desgasta y perjudica el funcionamiento del motor. 167 MANTENIMIENTO INDUSTRIAL Para evitar los efectos perjudiciales de la reacción del inducido existen dos posibilidades: • Desviar el calado las escobillas en el mismo sentido de rotación del inducido • Emplear polos de conmutación Conexiones de los motores de corriente continua Conexión serie. En el motor serie, el flujo es proporcional a la corriente que pasa por el inducido, el par de fuerza durante el arranque es muy alto y proporcional al cuadrado de la intensidad de corriente I2. Los motores serie se emplean como motores de arranque en los que el negativo está unido a masa, por lo que solo tiene un borne, el positivo, además consta de un dispositivo mecánico llamado bendix y un relé como interruptor, este relé recibe la orden de un pulsador en forma de llave de contacto. 168 MANTENIMIENTO INDUSTRIAL Para cambiar el sentido de rotación de un motor serie, basta con cambiar el sentido de la corriente en la bobina inductora cambiando la entrada por la salida ver figura 263. Motor en derivación o Shunt. Al ser la corriente de la inductora independiente de la que atraviesa el inducido, el par motor no es como en el motor serie, proporcional al cuadro de la intensidad, aquí el flujo es contante y menor la corriente absorbida, el menor poder de fuerza no es inconveniente si lo que se prefiere es una marcha larga y constante, pudiéndose regular la velocidad con el empleo del reóstato (figura 264). 169 MANTENIMIENTO INDUSTRIAL Motor de excitación Compound. En estos motores el devanado es doble, una parte está en serie con el inducido y la otra en paralelo, de esta forma se conserva un fuerte par de arranque y se puede mantener constante la velocidad de la marcha una vez superado el inicio (figura 265). Motor de excitación independiente. En estos motores, el devanado de las bobinas inductoras está conectado a una fuente de corriente separada de la corriente que recorre el inducido. Funciona de forma similar al motor en derivación, la separación de la excitación se utiliza cuando se desea regular la velocidad con precisión sin perder fuerza de arranque (figura 266). 170 MANTENIMIENTO INDUSTRIAL MOTORES UNIVERSALES También llamamos diasíncronos, funcionan con corriente continua o alterna y tienen su aplicación típica en los aparatos electrodomésticos. Para que un motor funcione con corriente continua, necesita que el inducido tenga colector, por la tanto, la primera condición es que tiene que tener escobillas, la segunda que sea monofásica, un motor trifásico no puede usarse con corriente continua. El uso más común de los motores universales, es la taladradora de mano (figura 267), y en casi todos los pequeños electrodomésticos, como batidoras, molinos de café, afeitadora, y alguno más. MOTORES ESPECIALES Son motores de corriente continua, pero que, como los de corriente alterna, no tiene escobillas. A este grupo pertenecen los servomotores, los motores paso a paso y el motor Brushless. 1.- Servomotor 171 MANTENIMIENTO INDUSTRIAL Características • Motor de corriente continua (C.C.). • Excitación basada en imanes cerámicos permanentes de elevada energía intrínseca y fuerza coercitiva. • Buena regulación y estabilidad. • Par elevado. • Posibilidad de fuertes aceleraciones y desaceleraciones. • Gran estabilidad de marcha, incluso a bajas velocidades. • Amplio campo de variación de giro. • Elevada inercia térmica. • Admite sobrecargas prolongadas. • Para cargas de pequeña y media potencia. Aplicaciones Este tipo de motor se utiliza principalmente para el movimiento de máquinas herramientas con avance convencional o numérico. Acoplamiento directo al eje individualizando los movimientos, con movimientos precisos y controlados a lo largo del proceso. También se utilizan en otro tipo máquinas que precisen avances precisos. 2.- Motores paso a paso Características que lo definen Los motores paso a paso vienen definidos por el número de posiciones, o paso por vuelta, que es más elevada sobre los motores a reluctancia o híbridos. También por el par máximo disponible en régimen permanente y su posibilidad de control de velocidad y del número de revoluciones o parte (fracciones exactas de vuelta). 172 MANTENIMIENTO INDUSTRIAL Partes principales de este tipo de motor El estator de este motor está constituido por varias bobinas alimentadas por impulsos de c.c. El rotor está constituido por uno o varios imanes permanentes. Por el número de posiciones o pasos por vuelta, se consigue una determinada velocidad. Aplicaciones Este tipo de motores se aplica en máquinas que precisan un control exacto de las revoluciones, o partes de vuelta. Normalmente se trata de motores de pequeña potencia aplicados a: • Accionamiento de cintas en impresoras, avance de papel. • Teletipos, telefax, cintas magnéticas. • Avance de películas en aparatos de televisión, cine, foto, etc. • Equipos médicos, tales como bombas de riñón, analizadores, muestreadores. • Lectores de tarjeta, etiquetas, etc. • Taxímetros, contadores. • Copiadoras. Plotters y Otros. 173 MANTENIMIENTO INDUSTRIAL Tipos de motores paso a paso • Motores de excitación unipolar (6 hilos). • Motores de excitación bipolar (5 hilos). • Motor híbrido. a.- Motor de excitación unipolar 174 MANTENIMIENTO INDUSTRIAL Motor de dos estatores (4 fases) En cada paso el rotor se desplaza 90º. Accionando los conmutadores Q1 y Q2 alternativamente se puede hacer que el rotor gire cada vez 90º, y ocupe las cuatro posiciones posibles. Variando la secuencia de conmutación se logra la inversión del sentido de rotación. Este tipo de motor tiene un estator de 4 fases y un rotor de un imán permanente con 24 polos (ángulo de paso 7º 30´ = 360º: 48). 175 MANTENIMIENTO INDUSTRIAL b.- Motor de excitación bipolar Motor de dos estatores (2 fases) Se seguirá aplicando el mismo criterio del motor de excitación unipolar. Para motor de 2 estatores (2 fases). Para 24 polos: ángulo de paso 7º 30' Para 12 polos: ángulo de paso 15º. 176 MANTENIMIENTO INDUSTRIAL Para motor de 4 estatores (4 fases). Para 24 polos: ángulo de fase 3º 45'. Para 12 polos: ángulo de fase 7º 30'. La ventaja de este tipo de motores está en el incremento del par respecto de los motores precedentes, pero tiene el problema de tener una electrónica más complicada. c.- Motor hibrido paso a paso El motor híbrido tiene la particularidad de ser de menor tamaño, con más posibilidades de ángulo. Este motor está formado por 4 discos, con el mismo número de dientes que las cavidades del estator. Ángulos de paso 24 pasos por revolución: 15º 28 pasos por revolución: 7º 30´ 96 pasos por revolución: 3º 45´ 200 pasos por revolución: 1º 50´ Se puede realizar cualquier movimiento incremental, siempre que sea múltiplo del ángulo de paso del motor que se trate. 177 MANTENIMIENTO INDUSTRIAL 2.- Motores Brushless Las ventajas del motor Brushless y su equipo de control asociado, vienen dado por las posibilidades que tiene en el control de la velocidad y posicionamiento exacto de los mecanismos accionados por el motor, respecto a las necesidades de la máquina a que se aplica, además de respuestas muy rápidas a las señales de arranque, paro, variaciones en la marcha, etc. Principio de los motores Brushless Los motores Brushless, o motores autosíncronos, o motores de c.c. sin escobillas, son una concepción moderna del clásico motor de c.c., donde la electrónica juega una parte importante en su funcionamiento y regulación. Los motores Brushless están constituidos por: - Imanes de alta energía. Circuito magnético de hierro con su devanado. - Captor para control de fase, velocidad y posición. El control sinusoidal evita frecuencias armónicas, asegurando la continuidad de giro a baja velocidad. En resumen, el motor Brushless es un motor autopropulsado de corriente continua y sin escobillas. 178 MANTENIMIENTO INDUSTRIAL Prestaciones de este tipo de motores - Elevado par másico. Prestaciones elevadas. Fiabilidad. Menor mantenimiento. - Exactitud en el control de la velocidad y regulación. - Alta capacidad de velocidad. Baja pérdida en el rotor. Baja inercia en el rotor - Motor de construcción cerrada, adecuado para ambientes de trabajo sucios. - No tiene los inconvenientes destructivos de los motores de c.c. clásicos. Entre los inconvenientes se citan tan sólo los de tipo económico, como son: - Variador más sofisticado y caro. Motores algo más caros. - Tanto variadores como motores se están poniendo más competitivos con los motores clásicos de c.c. Aplicaciones a) Máquina herramienta - Centros de mecanizado - Tornos, Fresadoras, Rectificadoras, Mandriladoras b) Robótica - Robots de soldadura, Robots de montaje - Manipuladores, Pórticos, Ensamblado c) Maquinaria industrial - Enrolladoras, Trefiladoras, Alimentadoras, Manutención, Dosificación 179 MANTENIMIENTO INDUSTRIAL SISTEMAS PARA ARRANQUE DE MOTORES Arranque estrella-triángulo Es uno de los métodos más empleado y mejor conocidos con el que se pueden arrancar motores desde 2´2 Kw hasta 11 Kw de potencia. Consiste en conectar el motor primero en estrella para, una vez arrancado, conmutar a la conexión en triángulo. Para que esto se pueda llevar a cabo, se debe utilizar un motor que esté preparado para funcionar a la tensión inferior conectado en triángulo. Así, por ejemplo, un motor de 220/380 podrá ser arrancado en una red de 220 V. Si a un motor de las características indicadas se le conecta primero en estrella, cada una de las bobinas del mismo quedará sometida a una tensión 1´73 inferior que si hubiese conectado en triángulo. Con ello se consigue que la intensidad en el arranque quede disminuida a la tercera parte respecto al arranque directo en conexión en triángulo. El par también queda reducido a la tercera parte, lo que conviene tenerlo en cuenta si el motor arranca con toda la carga. Por esta razón, conviene que el motor arranque en vacío o con poca carga. Arranque por resistencias estatóricas Consiste en reducir la tensión que producen unas resistencias conectadas en serie con el estator. Este sistema tiene el inconveniente de que se consigne disminuir la corriente en función lineal de la caída de tensión producida. Sin embargo, el par queda disminuido con el cuadrado de la caída de tensión, por lo que su aplicación se ve limitada a motores en los que el momento de arranque resistente sea bajo. Arranque por autotransformador Consiste en conectar un autotransformador en la alimentación del motor. De esta forma se consigue reducir la tensión y con ella la corriente de arranque. El par de arranque queda reducido en este caso en la misma proporción que la corriente, es decir, al cuadrado de la tensión reducida. Este sistema proporciona una buena característica de arranque, aunque posee el inconveniente de su alto precio. En la figura 282 se muestra el circuito de fuerza de un arrancador con autotransformador. 180 MANTENIMIENTO INDUSTRIAL REGULACIÓN DE VELOCIDAD Aplicando medios técnicos diferentes se consigue obtener velocidades diferentes de la nominal de un motor asíncrono ya sea trifásico o monofásico, se conocen tres formas diferentes: • Medios mecánicos • Motores con varios bobinados. • Variadores electrónicos de frecuencia Variación de velocidad por medios mecánicos • Utilizando poleas de diferentes diámetros. • Uso de reductores o multiplicadores de velocidad, empleando engranajes debidamente lubrificados. 181 MANTENIMIENTO INDUSTRIAL • Combinación de juego de poleas con correa deslizante. Variación del número de polos del estator Es posible obtener, sobre un mismo motor, dos, tres y hasta cuatro, velocidades diferentes, mediante la simple variación del número de polos del bobinado del estator. Este procedimiento sólo se aplica a los motores de jaula de ardilla. También podría ser aplicado a los motores de rotor bobinado, pero ello exigiría la simultánea variación del número de polos en los bobinados de estator y rotor, pero por resultar muy complicado, no se usa en estos motores. El estator del motor puede ser bobinado para funcionar a dos velocidades distintas por dos medios diferentes: con un bobinado único o con dos bobinados superpuestos. 182 MANTENIMIENTO INDUSTRIAL Mediante un bobinado único dispuesto en dos mitades especialmente ejecutado según la conexión Dahlander de forma que, con un simple cambio de conexiones de las dos mitades de cada fase, puedan ser conseguidas dos velocidades que estén en la relación 2:1, por ejemplo 1.500 y 750 r.p.m. Otro medio para conseguir dos velocidades distintas en un motor consiste en colocar en el estator dos bobinados superpuestos independientes entre sí, cada uno de ellos calculado para formar correctamente uno de los números de polos deseado. Esta ejecución puede ser empleada para cualquier combinación de velocidades; así, por ejemplo, si se deseara un motor de 4 y 6 polos, se colocarán en el estator dos bobinados superpuestos, uno de 4 polos y el otro de 6. También pueden ser construidos motores de tres y cuatro velocidades, basado en bobinados superpuestos. 183 MANTENIMIENTO INDUSTRIAL Regulación de velocidad con variadores de frecuencia Mediante un equipo electrónico especial basado en semiconductores de potencia (tiristores transistores y otros) se puede regular la frecuencia de alimentación del motor. Con ello se consigue modificar entre amplios límites la velocidad del motor (figura 290). El esquema básico de un variador de frecuencia consta de las siguientes partes: 1. El conjunto puede estar colocado sobre el mismo motor o ser independiente (figura 291 y 292) y consta de: 2. Rectificador de corriente trifásica. 3. Filtrado por condensador. 4. Paso de corriente continua a corriente alterna. 5. Detección de la intensidad de corriente absorbida por cada fase del motor. 6. Regulación de la variación de frecuencia. 7. Control de la velocidad. 8. Control digital. 184 MANTENIMIENTO INDUSTRIAL INVERSOR DE GIRO Para invertir el sentido de rotación de un motor asíncrono trifásico basta intercambiar las conexiones de dos cables de alimentación con las bornes del motor con los que resulta invertido el sentido de rotación del campo magnético giratorio. Para invertir el sentido de rotación de un motor asíncrono bifásico, es suficiente permutar las dos salidas de fase del bobinado estatórico y dejar una sin cambiar. Algunas máquinas exigen frecuentes inversiones del sentido de giro. En tal caso, resulta poco práctico efectuar el intercambio de conexiones, por lo que es preciso disponer un conmutador especial como el que se indica en la figura 294. 185 MANTENIMIENTO INDUSTRIAL FRENADO Frenado del motor asíncrono El frenado del motor asíncrono, al contrario de lo que ocurre con los motores de corriente continua, presenta fuertes dificultades técnicas. Un procedimiento de frenado consiste en colocar una correa alrededor de la polea del motor, y efectuar una tracción de esa correa mediante un electro-imán freno, también por medio de unas zapatas que frenan el eje del motor cuando falta la corriente. Existen otros procedimientos eléctricos basados en diversos principios, de los cuales los más usuales son: 1º Hacer funcionar al motor como generador asíncrono, y 2º Efectuar el frenado a contracorriente, para lo que se intercambian dos cables de alimentación mediante conmutador de inversión. 3º Sistema electrónico por contactor estático. 186 MANTENIMIENTO INDUSTRIAL CARACTERISTICAS NOMINALES DE LOS MOTORES Los motores eléctricos deben poseer una placa de identificación, que indique sus principales características nominales. En el caso de motores de inducción, por ejemplo, la placa debe tener las siguientes informaciones: - Nombre y datos del fabricante - Modelo - Potencia nominal (cv o Kw) - Monofásico o trifásico - Tensiones nominales (V) - Frecuencia nominal (Hz) - Categoría - Corriente(s) nominal(es) (A) - Velocidad nominal (r.p.m.) - Factor de servicio - Clase de aislamiento - Letra-código - Régimen - Grado de protección - Conexiones. Las características que son condiciones usuales de servicio (no están en la placa) son: a) Medio refrigerante (en general aire) de temperatura no superior a 40º C y exento de elementos perjudiciales al motor. b) Localización en la sombra c) Altitud no superior a 1000 m. Las condiciones que no se encuadran en las usuales son las llamadas condiciones especiales de servicio, entre los que se puede destacar: - Ambientes con elementos perjudiciales al motor tales como humedad excesiva, polvo, vapores, ambiente corrosivo, etc. - Funcionamiento en locales polvorosos o sea conteniendo partículas. - Exposición a choques o vibraciones anormales o basculamiento, provenientes de lentes externos. - Funcionamientos en ambientes poco ventilados. - Exposición a temperaturas superiores a 40º C o inferiores a 10º C. - Funcionamiento en altitudes superiores a 1000 m. 187 MANTENIMIENTO INDUSTRIAL Pasando a analizar los datos de la placa, tenemos: a) El modelo del motor.- Indicada por un número, es la referencia del fabricante para el registro de las características nominales y detalles constructivos. b) La potencia nominal.- Es la potencia que el motor puede suministrar dentro de sus características nominales, en forma permanente. c) La tensión nominal.- Es la tensión de la red para el cual el motor fue proyectado. Por las normas, el motor debe funcionar satisfactoriamente con tensiones de hasta ±10% de la tensión nominal. La gran mayoría de los motores se suministran con terminales que pueden ser conectadas de manera que puedan funcionar con por lo menos dos tensiones distintas, las tensiones más usuales son: 220, 380, 440 y 760 V. d) La frecuencia nominal.- Es la frecuencia del sistema para el cual el motor fue proyectado. De acuerdo con las normas los motores deben funcionar satisfactoriamente con frecuencia de hasta ± 5%. e) La categoría del motor.- Es indicada por una letra normalizada y define las limitaciones del par (máximo y de partida) y de la corriente de arranque estipuladas por la norma. La categoría define el tipo de curva de par x velocidad para que el motor sea adecuado a las características de carga accionada. f) La corriente nominal.- Es la corriente absorbida cuando el motor funciona a la potencia nominal, sobre tensión y frecuencia nominal. g) La velocidad nominal.- Es la velocidad del motor cuando suministra la potencia nominal, sobre tensión y frecuencia nominal. h) El factor de servicio.- Es el factor que aplicado a la potencia nominal, indica una sobrecarga admisible que puede ser utilizada continuamente, así por ejemplo, un motor de 50 cv y factor de servicio de 1.1 puede suministrar continuamente a una carga la potencia de: 50 x 1.1 = 55 [cv] i) La clase de aislamiento.- Indicada por una letra normalizada, identifica el tipo de materiales aislantes empleados en el arrollamiento del motor, las clases de aislamiento se definen por el respectivo limite de temperatura y son los siguientes: A - 105º C E - 120º C B - 130º C F - 155º C H - 180º C 188 MANTENIMIENTO INDUSTRIAL La temperatura del punto más caliente del arrollamiento debe ser mantenida bajo el límite de la clase. La tabla 56, indica la composición de temperatura para las diferentes clases. Tabla.- 56 Composición de la temperatura en función de la clase de aislamiento Clase de aislamiento Temperatura ambiente Elevación máxima de temperatura ºC Diferencia entre el punto más caliente y la temperatura media ºC Total (Temperatura del punto más caliente) ºC A 40 60 E 40 75 B 40 80 F H 40 40 100 125 5 5 10 15 15 105 120 130 155 180 j) La letra código (o código de partida).- Es una indicación normalizada, a través de una letra, de la potencia del motor a rotor bloqueado, sobre tensión nominal. La letra código de la relación aproximada de los kVA consumidos por cv con rotor bloqueado. Evidentemente el motor nunca funciona en esas condiciones, excepto en el instante de la partida y esta situación solo se mantiene hasta que comience a girar. Tabla.- 57 Letras-código y relaciones kVA/cv con rotor bloqueado Letras- código kVA/cv A B C D E F G H J K L M N P R S T U V Menos de 3.14 3.15 – 3.54 3.55 – 3.99 4.00 – 4.49 4.50 – 4.99 5.00 – 5.59 5.60 – 6.29 6.30 – 7.09 7.10 – 7.99 8.00 – 8.99 9.00 – 9.99 10.00 – 11.19 11.20 – 12.49 12.50 – 13.99 14.00 – 15.99 16.00 – 17.99 18.00 – 19.99 20.00 – 22.39 Más de 22.40 189 MANTENIMIENTO INDUSTRIAL Se puede escribir para la corriente de arranque: 𝐈𝐚 = 𝐏𝐍 𝐜𝐯 𝐱 𝐤𝐕𝐀 𝐜𝐯 𝐱𝟏𝟎𝟑 𝟑𝐱𝐕𝐍 𝐀 Ejemplo: Un motor trifásico jaula de ardilla de: PN = 3 (cv), V = 220 (V), Cos j = 0.83, h = 78% Letra de código J, su corriente nominal será: De la Tabla 57 vemos que, para la letra código J, los kVA/cv varia de 7.10 a 7.99, tomando el valor medio de 7.55, vemos que: k) El régimen.- Es el grado de regularidad de la carga a que el motor es sometido. Los motores normales son proyectados para régimen continuo, esto es funcionamiento con carga constante, igual a la potencia nominal del motor, por tiempo indefinido. Las normas prevén varios tipos de regímenes de funcionamiento. l) El grado de protección.- Es un número normalizado, formado por las letras IP seguidos de un número de dos cifras que define el tipo de protección del motor contra la entrada de agua o de objetos extraños. La placa de características del motor contiene también un diagrama de conexiones a fin de permitir la conexión correcta del motor al sistema. Es importante que el motor eléctrico tenga un alto rendimiento, no solo porque eso significa pérdidas reducidas y, por lo tanto menor calentamiento, sino también porque cuanto mayor es el rendimiento menor es el consumo de energía eléctrica, lo que significa economía. 190 MANTENIMIENTO INDUSTRIAL 191 MANTENIMIENTO INDUSTRIAL ―LAYOUTS‖ Y COMPONENTES DE LOS CIRCUITOS DE MOTORES Básicamente existen tres layouts clásicos (disposiciones) para la conexión de motores, esquematizados en el esquema de la figura 297.- a), b), c). TIPO-a) Circuitos terminales individuales uno por cada motor partiendo de un centro de distribución, es el caso más común. TIPO-b) Circuito de distribución principal conteniendo derivaciones, la diferencia entre este tipo y el tipo-a, es que aquí los dispositivos de protección están localizados en los puntos de derivación. TIPO-c) Circuito terminal único sirviendo a varios motores (de pequeño tamaño y otras cargas). El esquema de la figura 298 muestra esquemáticamente los diversos componentes de los circuitos de motores. 192 MANTENIMIENTO INDUSTRIAL 1) Conductores del circuito terminal Son los conductores que van desde el cuadro terminal o CCM (layout tipo-a), o desde el circuito de distribución (layout tipo-b) hasta el motor. 2) Dispositivo de protección del circuito terminal Es el dispositivo que tiene por función proteger los conductores del circuito terminal, del dispositivo de control del motor contra los cortocircuitos 3) Dispositivo de seccionamiento Se destina a desconectar el circuito terminal y el dispositivo de control del motor. 4) Dispositivo de control Es el dispositivo cuya finalidad principal es arrancar y parar el motor. 5) Dispositivo de protección del motor Se destina a proteger el motor y por extensión al dispositivo de control y los conductores del circuito terminal contra sobrecargas. 6) Conductores de protección del motor Son los conductores que en los motores de anillos rozantes, conectan el motor al dispositivo de control y los resistores del secundario. 7) Dispositivo de control y resistores del secundario Son los dispositivos que en el motor de anillos rozantes tienen por finalidad arrancar al motor y controlar su velocidad. 8) Conductores del circuito de distribución Son los conductores que alimentan el cuadro terminal o CCM (layout tipo-a) o directamente los circuitos terminales (layout tipo-b) 9) Protección de respaldo Es el dispositivo que protege el circuito de distribución contra los cortocircuitos. 193 MANTENIMIENTO INDUSTRIAL Conductores de alimentación El dimensionamiento de los conductores que alimentan motores, sean de los circuitos terminales o sean de los circuitos de distribución, debe ser siempre basado en la corriente nominal de los motores. Los conductores de un circuito terminal para la alimentación de un único motor deben tener una capacidad de conducción de corriente, en caso de utilizarse en régimen continuo, del 125% por lo menos de la corriente nominal (IM) del motor. Para conductores que alimentan dos o más motores Donde: IM1 = Corriente nominal mayor (A) Cuando algún motor del grupo se usara en régimen no continuo, la corriente de ese motor, para el cálculo indicado arriba, debe obtenerse su valor multiplicando la corriente nominal del motor por el correspondiente factor de ciclo de servicio dado en la siguiente Tabla 61: Para el caso de conductores que alimentan motores y además de ellas, cargas de iluminación otros aparatos, deben tener la siguiente capacidad de conducción de corriente: (NEC 430-25). 𝐧 𝐈𝐜 > 𝟏. 𝟐𝟓𝟏𝐌𝟏 + 𝐈𝐌𝐢 + 𝐠 𝐢=𝟐 𝐏𝐋 𝟑 ∙ 𝐕 ∙ 𝐜𝐨𝐬𝛗𝐋 194 MANTENIMIENTO INDUSTRIAL Donde: PL = Potencia instalada de las cargas que no son motores, g = Factor de demanda aplicable, CosφL = Factor de potencia. PROTECCION CONTRA LAS SOBRECARGAS (Cerca del motor) Los motores utilizados en régimen continuo deben ser protegidos contra las sobrecargas por un dispositivo integrante del motor o por un dispositivo independiente. En el caso de ser usado un dispositivo independiente su corriente nominal o de ajuste debe ser igual o inferior al valor obtenido. 𝐈𝐒𝐂 ≤ 𝐊 𝟏 𝐈𝐌 Donde: K1 = Es el factor que vale 1.25, para motores con factor de servicio igual o superior a 1.15 ó con elevación de temperatura permisible igual o inferior a 40º C, ó 1.15, para los demás tipos de motores. Como dispositivos independientes se pueden usar relés térmicos, fusibles o disyuntores. Los dispositivos integrantes del motor para protección contra sobrecargas se colocan en la carcasa del motor en serie de los arrollamientos y contienen un disco bimetálico con contactos. Según la NEC, la operación del dispositivo debe darse con una corriente que no exceda los siguientes porcentajes de la corriente nominal del motor. - Motor con corriente nominal no superior a 9 A; 170% - Motor con corriente nominal de 9,1 A a 20 A (inclusive); 156% - Motor con corriente nominal encima de 20 A; 140%. Cuando haya varios motores y eventualmente, otras cargas alimentadas por un único circuito, todos los motores deberán ser protegidos individualmente contra las sobrecargas. PROTECCION CONTRA CORTOCIRCUITOS La protección de los motores contra los cortocircuitos debe efectuarse por los dispositivos de protección de los circuitos terminales. Cuando solo un motor sea alimentado por un circuito terminal, la corriente nominal o de ajuste del dispositivo de protección del circuito, debe ser igual o inferior a 195 MANTENIMIENTO INDUSTRIAL los valores obtenidos de multiplicar la corriente a plena carga por los valores indicados en la Tabla 62, es decir: 𝐈𝐜𝐜 ≤ 𝐊 𝟐 𝐈𝐌 Donde: K2 = Factor obtenido de la Tabla 62, IM = Corriente nominal del motor (A), Icc = Corriente nominal o de ajuste del dispositivo (A). Cuando el valor de la corriente nominal o de ajuste, determinado a través de la Tabla 62, no fuese suficiente para permitir el arranque del motor, se puede aumentar hasta n valor adecuado siempre que no exceda la corriente nominal del motor, los siguientes valores: - 400% para los dispositivos fusibles no retardados, hasta un límite de 600 A. - 225% para los dispositivos fusibles retardados. 196 MANTENIMIENTO INDUSTRIAL - 1300% para disyuntores de apertura instantánea. - 400% en el caso de corrientes nominales iguales o inferiores a 100 A. - 300% en el caso de corrientes nominales superiores a 100 A., para disyuntores de tiempo inverso. Cuando haya varios motores y cargas alimentadas por un único circuito terminal, la protección contra los cortocircuitos debe ser efectuada por uno de los siguientes medios: a) Utilizando un dispositivo de protección contra cortocircuitos del circuito terminal, capaz de proteger adecuadamente el motor de menor corriente nominal y que no actué indebidamente en cualquier condición anormal de carga del circuito. b) Utilizando una protección individual adecuada en las derivaciones de cada motor. PROTECCION DE RESPALDO Un circuito de distribución que alimente circuitos terminales con motores debe ser protegido por un dispositivo de protección contra cortocircuitos, con una corriente nominal o de ajuste igual o inferior a la suma de: - La mayor corriente nominal o de ajuste, de los dispositivos de protección de los circuitos terminales de los motores, más - La corriente nominal de los demás motores, más - La corriente nominal de las demás cargas. Así un circuito que alimente a circuitos terminales de motores, nos da una corriente nominal o de ajuste del dispositivo de protección igual a: 𝐧 𝐈𝐑 > 𝐈𝐂𝐂𝟏 + 𝐈𝐌𝐢 𝐢=𝟐 SECCIONAMIENTO Los dispositivos de seccionamiento deben seccionar tanto los motores cuanto los dispositivos de control, y su posición (abierto o cerrado) debe ser claramente indicada. En el caso general la corriente nominal del dispositivo debe ser igual o mayor a 115% de la corriente nominal del motor. 𝐈𝐒 ≥ 𝟏. 𝟏𝟓 ∙ 𝐈𝐌 197 MANTENIMIENTO INDUSTRIAL La NEC admite que para motores estacionarios de 1/8 Hp, o menos que el dispositivo de protección del circuito terminal funcione como dispositivo de seccionamiento. Para motores de 2 Hp, o menos de tensión nominal 300 V o menos, puede usarse un interruptor de uso general con corriente nominal igual o superior al doble de la corriente nominal del motor. Cuando el dispositivo de seccionamiento no está visible, debe tomarse en cuanta las siguientes prescripciones: a) El dispositivo de seccionamiento debe poderse trabar en la posición abierta. b) Un dispositivo adicional de seccionamiento manual debe colocarse a la vista del motor. Ejemplo: Un motor trifásico, jaula de ardilla, 30 cv, 380 V, 1800 r.p.m., 50 Hz, funcionamiento continuo, partida a plena tensión. a) De la Tabla 60 obtenemos: IM = 44 [A] Ia/IM = 7.0 Factor de servicio 1.1 b) Letra código equivalente: despejando y remplazando tenemos: de la Tabla 57 obtenemos que la letra código es H. c) Capacidad de conducción de los conductores del circuito terminal. ICT ≥ 1.25 × 44 ICT ≥ 55 A d) Protección del motor contra sobre cargas (K1 = 1.15) ISC ≤ 1.15 × 44 ISC ≤ 50.6 A 198 MANTENIMIENTO INDUSTRIAL e) Protección del circuito terminal contra cortocircuitos admitido la utilización de dispositivo fusible retardado, de la tabla 62, obtenemos: K2 = 1.75 ICC ≤ 1.75 × 44 ICC ≤ 77 A f) Dispositivos de seccionamiento IS ≥ 1.15 × 44 IS ≥ 50.6 A 6.3.8. Instrumentación y control Introducción La práctica totalidad de los procesos que tienen lugar en una planta industrial exigen un control de los mismos. Esto se debe a la necesidad de controlar los distintos parámetros de cada proceso, a fin de garantizar un buen funcionamiento de los mismos, el óptimo aprovechamiento de los recursos implicados en la operación y unos niveles de calidad en el producto final. Además, en muchas ocasiones el control del proceso garantiza una operación segura de la planta. En los inicios de la era industrial, el operario llevaba a cabo un control manual de estas variables utilizando sólo instrumentos simples, manómetros, termómetros, válvulas manuales, etc., control que era suficiente por la relativa simplicidad de los procesos. Sin embargo, la gradual complejidad con que éstos se han ido desarrollando ha exigido su automatización progresiva por medio de los instrumentos de medición y control. Estos instrumentos han ido liberando al operario de su función de actuación física directa en la planta y al mismo tiempo, le han permitido una labor única de supervisión y de vigilancia del proceso desde centros de control situados en el propio proceso o bien en salas aisladas separadas; asimismo, gracias a los instrumentos ha sido posible fabricar productos complejos en condiciones estables de calidad y de características, condiciones que al operario le serían imposibles o muy difíciles de conseguir, realizando exclusivamente un control manual. La utilización de un adecuado sistema de control nos permitirá operar en las mejores condiciones posibles a cada requerimiento. De este modo se optimizará el rendimiento general del proceso, con un mejor aprovechamiento de los recursos implicados en el mismo. Todo ello repercutirá en una notable mejora económica de los resultados. 199 MANTENIMIENTO INDUSTRIAL La adopción de un sistema de control requerirá una importante inversión inicial, pero resultará en unos menores costes de operación de la planta. El balance económico final será positivo, dado que el ahorro conseguido en operación será superior a los costes de instalación del sistema de control. Por este motivo será importante en todo momento controlar el grado de utilización que se está haciendo del sistema, ya que de este dependerá la economía de la operación. Los procesos industriales a controlar pueden dividirse ampliamente en dos categorías: procesos continuos y procesos discontinuos. En ambos tipos, deben mantenerse en general las variables (presión, caudal, nivel, temperatura, etc.), bien en un valor deseado fijo, bien en un valor variable con el tiempo de acuerdo con una relación predeterminada, o bien guardando una relación determinada con otra variable. El sistema de control que permite este mantenimiento de las variables puede definirse como aquel que compara el valor de la variable o condición a controlar con un valor deseado y toma una acción de corrección de acuerdo con la desviación existente sin que el operario intervenga en absoluto. El sistema de control exige pues, para que esta comparación y subsiguiente corrección sean posibles, que se incluya una unidad de medida, una unidad de control, un elemento final de control y el propio proceso. En la parte de medida existe un sensor y una parte de acondicionamiento de la señal proveniente de dicho sensor. Esa señal medida se transmite a través de un medio de transmisión a la parte de control, o la cual actúa sobre la variable o proceso a medir, con lo que se establece de este modo un bucle o lazo que recibe el nombre de bucle de control. 200 MANTENIMIENTO INDUSTRIAL Los sistemas de control se clasifican en sistemas de lazo abierto o de lazo cerrado. La distinción la determina la acción de control, que es la que activa al sistema para producir la salida. Un sistema de control de lazo abierto es aquel en el cual la acción de control es independiente de la salida, tal como se ilustra en la figura 300. Un sistema de control de lazo cerrado es aquel en el que la acción de control es en cierto modo dependiente de la salida. La figura 301 ilustra un ciclo de lazo cerrado. Los sistemas de control a lazo abierto tienen dos rasgos sobresalientes: a) La habilidad que éstos tienen para ejecutar una acción con exactitud está determinada por su calibración. Calibrar significa establecer o restablecer una relación entre la entrada y la salida con el fin de obtener del sistema la exactitud deseada. b) Estos sistemas no tienen el problema de la inestabilidad, que presentan los de lazo cerrado. Los sistemas de control de lazo cerrado se llaman comúnmente sistemas de control por realimentación (o retroacción). Un tostador automático es un sistema de control de lazo abierto, que está controlado por un regulador de tiempo. El tiempo requerido para hacer tostadas, debe ser anticipado por el usuario, quien no forma parte del sistema. El control sobre la 201 MANTENIMIENTO INDUSTRIAL calidad de la tostada (salida) es interrumpido una vez que se ha determinado el tiempo, el que constituye tanto la entrada como la acción de control. Un mecanismo de piloto automático y el avión que controla, forman un sistema de control de lazo cerrado (por realimentación). Su objetivo es mantener una dirección específica del avión, a pesar de los cambios atmosféricos. El sistema ejecutará su tarea midiendo continuamente la dirección instantánea del avión y ajustando automáticamente las superficies de dirección del mismo (timón, aletas, etc.) de modo que la dirección instantánea coincida con la especificada. El piloto u operador, quien fija con anterioridad el piloto automático, no forma parte del sistema de control. En ambos casos se observa que existen elementos definidos como el elemento de medida, el transmisor, el controlador, el indicador, el registrador y el elemento final. Estos elementos y otros adicionales se estudiarán en el resto del apartado, considerando las características propias del instrumento y las clases de instrumentos que se emplean en los procesos industriales. 202 MANTENIMIENTO INDUSTRIAL Definición de variable Las cantidades o características que se miden (las cuales sirven de base de control) se denominan variables, frecuentemente reciben el nombre de variables de medición, variables de instrumentación o variables de proceso. Existen variables dependientes e independientes. Clasificación de las variables Las características que se miden, las variables de medición, se han clasificado según el campo a la cual están dedicados, así entonces se pueden establecer: a. Variables térmicas Las variables térmicas se refieren a la condición o carácter de un material que depende de su energía térmica. Para cuantificar la energía térmica de un material se requiere conocer las condiciones: � Temperatura: Se define como la condición de un cuerpo o material que determina la transferencia de calor hacia o desde otros cuerpos. � Calor específico: Es la propiedad de un cuerpo que define la relación entre el cambio de temperatura y la variación del nivel de energía térmica. � Variables de energía térmica: Se evalúan a partir de la entalpía y entropía relacionadas con la energía térmica total y la disponible en un cuerpo. � Valor calorífico: Representa la característica de un material que determina la cantidad de energía térmica (calor) que se produce o absorbe por un cuerpo sometido a condiciones específicas. b. Variables de radiación Las variables de radiación se refieren a la emisión, propagación y absorción de energía a través del espacio o de algún material en la forma de ondas; y por extensión, la emisión, propagación y absorción corpuscular. Deben incluir las variables fotométricas (color, brillo, reflectancia, etc.) relacionadas con la luz visible y las variables acústicas que incluyen los sonidos perceptibles y las ondas imperceptibles que se propagan a través de cualquier medio, tales como las ondas ultrasónicas. � Radiación nuclear: Es la radiación asociada con la alteración del núcleo del átomo. � Radiación electromagnética: El espectro de radiación electromagnética incluye la energía radiante desde la emisión a frecuencias de potencia pasando por las 203 MANTENIMIENTO INDUSTRIAL bandas de transmisión de radio; calor radiante, luz infrarroja, visible y ultravioleta y los rayos X y cósmicos. Una forma de radiación electromagnética son los rayos gamma procedentes de fuentes de suministro nucleares. c. Variables de fuerza Las variables de fuerza son aquellas cantidades físicas que modifican la posición relativa de un cuerpo, la modificación puede incluir hasta la alteración de las dimensiones en forma permanente (deformaciones plásticas) o en forma transitoria (deformaciones elásticas), las fuerzas pueden tener un carácter estático (peso propio) o dinámico. Las pueden producir desplazamientos y/o deformaciones lineales, flexionantes y/o torsionantes. Las cargas que representan interés son las fuerzas totales, momentos flexionantes, momentos o par de torsión, la presión o vacío (variable dependiente de la fuerza y del área sobre la que actúa). d. Variables de velocidad Estas variables están relacionadas con la velocidad a la que un cuerpo se mueve hacia o en dirección opuesta a un punto de referencia fijo. El tiempo siempre es uno de los componentes de la variable velocidad, el término velocidad se asocia a un fluido a través del flujo o caudal, en caso de cuerpos se puede apreciar la rapidez con que el cuerpo recorre una medida por unidad de tiempo, la medida puede ser lineal o angular. La variable velocidad puede también cambiar en el tiempo dando origen a otra variable representada por la aceleración. e. Variables de cantidad Las variables de cantidad se refieren a la cantidad total de material que existe dentro de ciertos límites específicos, así por ejemplo: la masa es la cantidad total de materia dentro de límites específicos. En este caso, el peso es la medida de la masa en base a la atracción de la gravedad. f. Variables de tiempo Las variables de tiempo son las medidas del lapso transcurrido, es la duración de un evento en unidades de tiempo, la cantidad de periodos que se repiten en una unidad de tiempo se define como la frecuencia, la cual por lo general se mide en Hertz. g. Variables geométricas Estas se refieren a la posición o dimensión de un cuerpo. Las variables geométricas están relacionadas con el estándar fundamental de longitud. Se puede apreciar como variable la posición de un cuerpo con respecto a una referencia, se puede 204 MANTENIMIENTO INDUSTRIAL dimensionar un cuerpo tomando la distancia relativa entre dos puntos, se puede determinar la superficie de un cuerpo partiendo del área encerrada por al menos tres puntos de distancias entre sí conocida. Se puede apreciar la forma, el contorno según la localización relativa de un grupo de puntos representativos de la superficie que se mide. Dentro de las variables geométricas debe considerarse al nivel de un líquido o sólido representado por la altura o distancia desde la referencia base. h. Variables de propiedades físicas Las variables de propiedades físicas se refieren a las propiedades físicas de sustancias, sin considerar aquellas que están relacionadas con la masa y la composición química. Por ejemplo: � Densidad y Peso Específico: Por definición la densidad es la cantidad de masa de una materia contenida en una medida de volumen unitario, mientras que el peso específico es la relación entre la densidad del material y la densidad del agua a condiciones especificadas. � Humedad: Es la cantidad de vapor de agua en la atmósfera. La humedad absoluta es el peso de agua en la unidad de volumen, en algunas ocasiones se expresa en términos de la presión del vapor de agua. La humedad relativa es la relación entre la presión existente del vapor de agua en cierta atmósfera y la presión del vapor de agua saturado a la misma temperatura. El contenido de humedad es la cantidad de agua libre que se encuentra en una sustancia. � Viscosidad: Es la resistencia que ofrece un fluido a su deformación por corte. � Características estructurales: Son las propiedades cristalinas, mecánicas o metalúrgicas de las sustancias. Dureza, ductilidad, estructura metalúrgica, etc. i. Variables de composición química Son las propiedades químicas de las sustancias referidas a su composición, a su acidez o alcalinidad. j. Variables eléctricas Las variables eléctricas son las necesarias para evaluar energía eléctrica, por ejemplo: diferencia de potencial eléctrico entre dos puntos, corriente eléctrica que circula por un conductor (impedancia), resistencia que ofrece un elemento al paso de corriente (resistividad), capacidad de un cuerpo en retener energía eléctrica (capacitancia) o inducir campos magnéticos (inductancia). 205 MANTENIMIENTO INDUSTRIAL Definición de Instrumentación Industrial Instrumentación: es el grupo de elementos que sirven para medir, controlar o registrar variables de un proceso con el fin de optimizar los recursos utilizados en éste. Un ejemplo de un instrumento cotidiano es el reloj, el cual nos sirve para controlar el uso eficaz de nuestro tiempo. En otras palabras, la instrumentación es la ventana a la realidad de lo que está sucediendo en determinado proceso, lo que servirá para determinar si el mismo va encaminado hacia donde deseamos. En caso contrario, podremos usar la instrumentación para actuar sobre algunos parámetros del sistema y proceder de forma correctiva. La instrumentación es lo que ha permitido el gran avance tecnológico de la ciencia actual en casos tales como: los viajes espaciales, la automatización de los procesos industriales y muchos otros de los aspectos de nuestro mundo moderno; ya que la automatización es solo posible a través de elementos que puedan sensar lo que sucede en el ambiente, para luego tomar una acción de control pre-programada que actué sobre el sistema y obtener el resultado previsto. Clases de instrumentos Los instrumentos de medición y de control son relativamente complejos y su función puede comprenderse bien si están incluidos dentro de una clasificación adecuada. Como es lógico, pueden existir varias formas para c1asificar los instrumentos, cada una de ellas con sus propias ventajas y limitaciones. Se considerarán dos clasificaciones básicas: la primera relacionada con la función del instrumento y la segunda con la variable del proceso. Este modo de clasificarlos no es necesariamente el único, pero se considera bastante completo. 1.- En función del instrumento De acuerdo con la función del instrumento, obtenemos las formas siguientes: Instrumentos ciegos: Estos son aquellos que no tienen indicación visible de la variable. Hay que hacer notar que son ciegos los instrumentos de alarma, tales como presostatos y termostatos (interruptores de presión y temperatura respectivamente) que poseen una escala exterior con un índice de selección de la variable, ya que sólo ajustan el punto de disparo del interruptor o conmutador al cruzar la variable el valor 206 MANTENIMIENTO INDUSTRIAL seleccionado. Son también instrumentos ciegos, los transmisores de caudal, presión, nivel y temperatura sin indicación. Figura 302 Instrumentos indicadores: Estos disponen de un índice y de una escala graduada en la que puede leerse el valor de la variable. Según la amplitud de la escala se dividen en indicadores concéntricos y excéntricos. Existen también indicadores digitales que muestran la variable en forma numérica con dígitos. Figura 303 Instrumentos registradores: Estos registran con trazo continuo o a puntos la variable, y pueden ser circulares o de gráfico rectangular o alargado según sea la forma del gráfico. Los registradores de gráfico circular suelen tener el gráfico de 1 revolución en 24 horas mientras que en los de gráfico rectangular la velocidad normal del gráfico es de unos 20 mm/hora. Figura 304 207 MANTENIMIENTO INDUSTRIAL Elementos primarios: Ellos están en contacto con la variable y utilizan o absorben energía del medio controlado para dar al sistema de medición una indicación en respuesta a la variación de la variable controlada. El efecto producido por el elemento primario puede ser un cambio de presión, fuerza, posición, medida eléctrica, etc. Por ejemplo: en los elementos primarios de temperatura de bulbo y capilar, el efecto es la variación de presión del fluido que los llena y en los de termopar se presenta una variación de fuerza electromotriz. Figura 305 Transmisores: Estos captan la variable de proceso a través del elemento primario y la transmiten a distancia en forma de señal neumática de margen 3 a 15 psi (libras por pulgada cuadrada) o electrónica de 4 a 20 mA de corriente continua. La señal neumática de 3 a 15 psi equivale a 0,206 - 1,033 bar (0,21 - 1,05 Kg/cm2) por lo cual, también se emplea la señal en unidades métricas 0,2 a 1 bar (0,2 a 1 Kg/cm2). Asimismo, se emplean señales electrónicas de 1 a 5 mA c.c., de 10 a 50 mA c.c. y de O a 20 mA c.c., la señal normalizada es de 4-20 mA c.c. La señal digital utilizada en algunos transmisores inteligentes es apta directamente para ordenador. El elemento primario puede formar o no parte integral del transmisor; el primer caso lo constituye un transmisor de temperatura de bulbo y capilar y el segundo un transmisor de caudal con la placa orificio como elemento primario. Figura 306 Transductores: Estos reciben una señal de entrada función de una o más cantidades físicas y la convierten modificada o no a una señal de salida. Son transductores, un relé, un elemento primario, un transmisor, un convertidor PP/I 208 MANTENIMIENTO INDUSTRIAL (presión de proceso a intensidad), un convertidor PP/P (presión de proceso a señal neumática), etc. Convertidores: Estos son aparatos que reciben una señal de entrada neumática (3-15 psi) o electrónica (4-20 mA c.c.) procedente de un instrumento y después de modificarla envían la resultante en forma de señal de salida estándar. Ejemplo: un convertidor P/I (señal de entrada neumática a señal de salida electrónica, un convertidor I/P (señal de entrada eléctrica a señal de salida neumática). Este último término es general y no debe aplicarse a un aparato que convierta una señal de instrumentos. Receptores: Estos reciben las señales procedentes de los transmisores y las indican o registran. Los receptores controladores envían otra señal de salida normalizada a los valores ya indicados 3-15 psi en señal neumática, o 4-20 mA c.c. en señal electrónica, que actúan sobre el elemento final de control. Controladores: Estos comparan la variable controlada (presión, nivel, temperatura) con un valor deseado y ejercen una acción correctiva de acuerdo con la desviación. La variable controlada la pueden recibir directamente, como controladores locales o bien indirectamente en forma de señal neumática, electrónica o digital procedente de un transmisor. Figura 306 Elemento final de control: Este recibe la señal del controlador y modifica el caudal del fluido o agente de control. En el control neumático, el elemento suele ser una válvula neumática o un servomotor neumático que efectúan su carrera completa de 3 a 15 psi (0,2-1 bar). En el control electrónico la válvula o el servomotor anteriores son accionados a través de un convertidor de intensidad a presión (I/P) o señal digital a presión que convierte la señal electrónica de 4 a 20 mA c.c. o digital a neumática 3-15 psi. En el control eléctrico el elemento suele ser una válvula motorizada que efectúa su carrera completa accionada por un servomotor eléctrico. Las señales neumáticas (3-15 psi o 0,2-1 bar o 0,2-1 Kg/cm2) y electrónica (4-20 mA c.c.) permiten el intercambio entre instrumentos de la planta. No ocurre así en los instrumentos de señal de salida digital (transmisores, controladores) donde las señales son propias de cada suministrador. 209 MANTENIMIENTO INDUSTRIAL Figura 307.- Elementos finales de control 2.- En función de la variable de proceso De acuerdo con la variable del proceso, los instrumentos se clasifican en: Instrumentos de caudal, nivel, presión, temperatura, densidad y peso específico, humedad y punto de rocío, viscosidad, posición, velocidad, pH, conductividad, frecuencia, fuerza, turbidez, etc. Esta clasificación corresponde específicamente al tipo de las señales medidas siendo independiente del sistema empleado en la conversión de la señal de proceso. De este modo, un transmisor neumático de temperatura del tipo de bulbo y capilar, es un instrumento de temperatura a pesar de que la medida se efectúa convirtiendo las variaciones de presión del fluido que llena el bulbo y el capilar; el aparato receptor de la señal neumática del transmisor anterior es un instrumento de temperatura, si bien, al ser receptor neumático lo podríamos considerar instrumento de presión, caudal, nivel o cualquier otra variable, según fuera la señal medida por el transmisor correspondiente; un registrador potenciométrico puede ser un instrumento de temperatura, de conductividad o de velocidad, según sean las señales medidas por los elementos primarios de termopar, electrodos o dínamo. Asimismo, esta clasificación es independiente del número y tipo de transductores existentes entre el elemento primario y el instrumento final. Así ocurre en el caso de un transmisor electrónico de nivel de 4 a 20 mA c.c., un receptor controlador con salida de 4-20 mA c.c., un convertidor intensidad-presión (I/P) que transforma la señal de 4-20 mA c.c. a neumática de 3-15 psi y la válvula neumática de control; todos estos instrumentos se consideran de nivel. En la designación del instrumento se utiliza en el lenguaje común las dos clasificaciones expuestas anteriormente. Y de este modo, se consideran instrumentos tales como transmisores ciegos de presión, controladores registradores de temperatura, receptores indicadores de nivel, receptores controladores registradores de caudal, etc. En la figura 308 pueden verse la representación de los diversos instrumentos descritos. 210 MANTENIMIENTO INDUSTRIAL Nótese que se consideran instrumentos de campo y de panel; la primera designación incluye los instrumentos locales situados en el proceso o en sus proximidades (es decir, en tanques, tuberías, secadores, etc.) mientras que la segunda se refiere a los instrumentos montados en paneles, armarios o pupitres situados en salas aisladas o en zonas del proceso. 3.- Funcionamiento analógico y digital Es posible, además, clasificar la forma en que pueden ejecutarse las funciones básicas enfocando la atención a la naturaleza continua o discreta de las señales que representa la información. Las señales que varían en forma continua y que pueden tomar una infinidad de valores en cualquier intervalo dado, se llaman señales analógicas; los dispositivos que producen esas señales se llaman dispositivos analógicos. (Esto es rigurosamente cierto en un sentido macroscópico, ya que todos los efectos físicos se convierten en discretos en consideraciones atomísticas.) En contraste, las señales que varían en pasos discretos y pueden así tomar solamente un número finito de valores diferentes, se describen como señales digitales; los aparatos que producen estas señales se llaman aparatos digitales. La mayoría de los aparatos de medida actuales son del tipo analógico. Está aumentando la importancia de los instrumentos digitales, quizá principalmente debido al uso creciente de las computadoras digitales, tanto en los sistemas de reducción de datos como en los automáticos de control. Como la calculadora digital trabaja solo con señales digitales, cualquier información que se le suministre debe ser en la forma digital. La salida de la computadora tiene también forma digital. Así, cualquier comunicación con la computadora en el extremo de la entrada o 211 MANTENIMIENTO INDUSTRIAL de la salida deberán darse en señales digitales. Como la mayor parte de las medidas actuales y aparatos de control son de naturaleza analógica, es necesario tener tanto convertidores analógicos a digitales (a la entrada de la computadora) como convertidores digitales a analógicos (a la salida de la computadora). Estos dispositivos sirven de "traductores" que permiten al calculista comunicarse con el mundo exterior, que es en su mayor parte de naturaleza analógica. Los elementos de un instrumento Es posible y conveniente describir tanto la operación como el rendimiento (grado en que se aproxima a la perfección) de los instrumentos de medida y equipo auxiliar, en general, sin recurrir a aparatos de física específicos. La operación puede describirse en función de los elementos activos de los sistemas de instrumentos, y el rendimiento se define en función de las características de rendimiento estático y dinámico, en esta sección se desarrolla el concepto de elementos activos de un instrumento o sistema de instrumentos. Si se examinan diversos instrumentos de física con el fin de generalizar, pronto se reconoce en los elementos de los instrumentos un patrón de semejanza que se repite con respecto a la función, lo que conduce a la idea de dividir los instrumentos en un número de tipos limitados de elementos, de acuerdo con la función general ejecutada por el elemento. Esta división puede hacerse de varias maneras, y en la actualidad no se usan esquemas estandarizados aceptados universalmente. Un esquema que puede ayudar a comprender la operación de cualquier instrumento nuevo con el que pueda estar en contacto y también planificar el proyecto de un instrumento nuevo, se presenta en la figura 309. El diagrama de la figura 309 representa una posible disposición de los elementos activos en un instrumento e incluye todas las funciones básicas que se consideran necesarias para la descripción de cualquier instrumentó. El elemento sensor principal es el que primero recibe energía del medio medido y produce una salida que, de algún modo, depende de la cantidad medida. Es importante notar que un instrumento siempre extrae alguna energía del medio medido; por tanto, la cantidad medida resulta siempre alterada en el acto de la medida, siendo la causa de que una medida perfecta resulte teóricamente imposible. Los buenos instrumentos se proyectan de manera que disminuyan al mínimo este efecto, pero está siempre presente en menor o mayor grado. 212 MANTENIMIENTO INDUSTRIAL La señal de salida del elemento sensor principal es alguna variable física, como un desalojamiento o un voltaje. Para que el instrumento ejecute la función deseada, puede ser necesario convertir esta variable en otra más adecuada, sin dejar de conservar el contenido de información de la señal original. Un elemento que ejecuta una función así se llama elemento de conversión variable. Debe notarse que no todos los instrumentos necesitan incluir un elemento de conversión variable mientras que algunos requieren varios. Además, los "elementos" de que se habla son elementos activos, no físicos. Es decir, la figura 309 muestra un instrumento cuyos elementos activos han sido claramente separados en bloques, lo cual puede hacer pensar que el aparato físico se puede separar con precisión en subconjuntos que ejecutan las funciones específicas mostradas. En general, este no es el caso; por ejemplo, una pieza específica de utilería puede ejecutar varias funciones básicas. Al ejecutar su propio trabajo, un instrumento puede requerir que una señal representada por alguna variable física se manipule de alguna manera. Por manipulación se entiende, específicamente, un cambio en valor numérico de acuerdo con alguna regla definida, pero conservando la naturaleza física de la variable. Así, un amplificador electrónico acepta una señal de pequeño voltaje como entrada y produce una señal de salida que es también un voltaje, pero es un número constante de veces mayor que la entrada. Un elemento que ejecuta esta función se llamará elemento de manipulación variable. No es necesario que invariablemente un elemento de manipulación variable siga a un elemento de conversión variable; puede precederlo, aparecer en otro lugar en la cadena, o no aparecer del todo. Cuando los elementos funcionales de un instrumento están en realidad separados materialmente, es necesario transmitir los datos de uno a otro. Al elemento que ejecuta esta función se le llama elemento transmisor de datos. Puede ser tan sencillo como un cojinete y un eje, o tan complicado como un sistema de telemetría, para transmitir por radio señales de los proyectiles espaciales al equipo de tierra. Si la información referente a la cantidad medida se va a comunicar a los seres humanos para monitorización, control o análisis, debe ponerse en una forma que pueda reconocer alguno de los órganos de los sentidos. El elemento que ejecuta esta función de "traducción" se llama elemento de presentación. Esta función incluye la simple indicación de un índice moviéndose en una escala, y también el registro de una estilográfica moviéndose en una hoja de registro. La indicación y el registro pueden también efectuarse en elementos discretos (en vez de en forma continua). Mientras que la mayoría de los instrumentos se comunican con la gente por medio del sentido de la vista, el uso de otros sentidos es compatible, como el oído y el tacto. En algunos métodos de registro pueden presentarse los datos de manera que no sean apreciables directamente por los sentidos humanos. Un ejemplo digno de mencionar es la grabadora de cinta magnética. En este caso, se requieren los 213 MANTENIMIENTO INDUSTRIAL instrumentos adecuados para extraer la información almacenada cuando se desee y convertirla en una forma inteligible para el hombre. La figura 309 se considera como un vehículo para presentar el concepto de elementos activos y no como un esquema físico de un instrumento general. Un instrumento dado puede incluir las funciones básicas en cualquier número o combinación; no necesitan aparecer en el orden de la figura 309. Un componente físico dado puede servir para varias funciones básicas. Como ejemplo de los conceptos anteriores, se considera el manómetro rudimentario de la figura 310. Una de las varias interpretaciones posibles es la que sigue: el elemento sensor principal es el pistón, que también sirve para la función de conversión variable, ya que convierte la presión del líquido (fuerza por unidad de área) en una fuerza resultante en la cara del pistón. Se transmite la fuerza por la biela al resorte, que la convierte en un desalojamiento proporcional. Este desalojamiento de la biela se amplifica (manipulado) por la transmisión de palancas para que se produzca en el índice un desalojamiento mayor. El índice o manecilla y la escala indican la presión, sirviendo así como elementos presentadores de datos. Si fuera necesario ubicar el manómetro a alguna distancia de la fuente de presión, un tubo pequeño podría servir como elemento transmisor de datos. 214 MANTENIMIENTO INDUSTRIAL La figura 311 representa un termómetro del tipo de presión. El bulbo lleno de líquido actúa como sensor principal y como elemento de conversión variable, ya que un cambio de temperatura se convierte en un aumento de presión dentro del bulbo, debido a la dilatación térmica del líquido confinado que lo llena. Esta presión se transmite por el tubo a un manómetro del tipo Bourdon que convierte la presión en desalojamiento. Este desalojamiento se manipula por la transmisión de palancas y los engranes para amplificar el movimiento de la manecilla. La escala y la manecilla sirven para la presentación de datos. Elementos activos y pasivos Una vez que se han identificado ciertas funciones básicas comunes a todos los instrumentos, es oportuno ver la posibilidad de hacer algunas generalizaciones de cómo pueden ejecutarse estas funciones. Una de estas generalizaciones es la que se refiere a la energía. Al ejecutar cualquiera de las funciones generales indicadas en la figura 309, un componente físico puede actuar como transductor activo o como transductor pasivo. Aquellos componentes en los que la energía de salida la proporciona casi en su totalidad la señal de entrada se llaman comúnmente transductores pasivos. Las señales de entrada y de salida pueden estar formadas por energía de la misma forma (ambas pueden ser mecánicas) o puede haber conversión de energía cambiando de una forma a 215 MANTENIMIENTO INDUSTRIAL otra (de mecánica a eléctrica) (En mucha literatura técnica el término transductor se restringe a los dispositivos en los que hay conversión de energía, pero, ajustándose a la definición que de este término da el diccionario, no se hará esta restricción). Por otra parte, el transductor activo, tiene una fuente auxiliar de potencia que suministra gran parte de la potencia de salida, mientras que la señal de entrada suministra solamente una porción insignificante. Además, puede haber o no conversión de una forma a otra de la energía. Transductores Otro transductor activo de gran importancia práctica, el servomecanismo de instrumentos, se muestra en forma simplificada en la figura 312. Este es en realidad un sistema de instrumentos formado de componentes, algunos de los cuales son transductores pasivos y otros transductores activos. Sin embargo, cuando se considera como entidad, con voltaje de entrada ei y desalojamiento de salida xo, satisface la definición de un transductor activo y conviene considerarlo así. El objeto de este aparato es hacer que el movimiento xo siga las variaciones del voltaje ei en forma proporcional. Como el par motor es proporcional al voltaje de error ee, es claro que el sistema puede estar en reposo solamente si ee es cero. Esto ocurre solo cuando ei = esl; como esl es proporcional a xo, esto significa que xo debe ser proporcional a ei en el caso estático. Si ei varía, xo tenderá a seguirlo, y con un proyecto correcto será posible obtener un "seguimiento" preciso de ei por xo. 216 MANTENIMIENTO INDUSTRIAL Conversores La conversión A/D y D/A, el principio de funcionamiento de los ordenadores está basado en el mundo de la lógica binaria de los circuitos en los que sólo son tenidos en cuenta dos niveles de tensión: el nivel alto que se hace corresponder matemáticamente en lógica positiva a un uno y el nivel bajo que se hace corresponder a un cero. Con estos dos niveles funcionan la totalidad operacional de los computadores, micros, microprocesadores y periféricos. Los programas son también transformados en último término a ceros y unos para ser introducidos en memoria. De lo dicho se deduce que difícilmente un ordenador podría tomar contacto con el amplio mundo analógico que le rodea, por ejemplo, para procesar temperaturas, tensiones o cualquier otro parámetro analógico, con un número indeterminado de niveles; de ahí la necesidad de la conversión analógico-digital (A/D) o digital-analógica (D/A) como paso intermedio o interfaz entre el mundo de lo lógico y el mundo de lo analógico. Conversores D/A En la conversión D/A a cada valor binario de la entrada le corresponde un nivel de tensión a la salida. Existen varios métodos para obtener la conversión digitalanalógica, de los cuales describimos aquí algunos, de modo algo simplificado para alcanzar la finalidad conceptual que se pretende. Llegados a este punto, es preciso remarcar que en los procesos de conversión siempre intervienen dos factores que es necesario apreciar al máximo para obtener éxito en los resultados. Por una parte está la precisión de la medida, lo cual conlleva un rechazo máximo de los errores de conversión, cosa que complica visiblemente la circuitería, y por otra parte, los ruidos eléctricos, muy abundantes en el ambiente y que perjudican y alteran la precisión. En nuestra descripción funcional de un D/A prescindimos de estas protecciones en aras de una mayor simplicidad. Convertir un dato en binario a un nivel analógico no es más que atribuir un valor de tensión a cada valor binario; así, el rango de valores en hexadecimal desde 00 hasta FF (FF = 256 en decimal) se corresponderá con otros tantos 256 valores niveles o valores de tensión. Para conseguir pasar un valor en binario a un nivel de tensión, se recurre a una red de resistencias que, debidamente conectadas y con unos valores concretos, genere una tensión en función de los niveles eléctricos binarios que se encuentren en un momento dado en cada uno de los bits que intervienen en la conversión. La mencionada red resistiva es, por tanto, la clave de la conversión. Existen dos redes perfectamente diferenciadas que cumplen este cometido: la red de resistencias ponderadas y la red R, 2R. Para explicar este concepto, supongamos que 217 MANTENIMIENTO INDUSTRIAL disponemos de un registro de cuatro bits que puede ser cargado con cualquier valor desde O a F. Una red ponderada de resistencias consistiría en conectar una resistencia a cada salida, los valores de estas resistencias están en función del peso de cada salida del registro, de ahí lo de ponderadas, de manera que los valores de las resistencias a conectar desde el bit de mayor peso al menor son R, 2R, 4R y 8R. Si una vez conectadas estas resistencias, se aplicaran los valores binarios O a F consecutivamente se observaría una rampa ascendente de 16 escalones, cada uno de los escalones se correspondería con un valor binario. Obsérvese que los valores de las resistencias siguen en orden inverso al valor del exponente binario de las salidas del registro. Por el mismo procedimiento se puede continuar la red resistiva, si se desea mayor precisión hacen falta más escalones y, por ende, más bits. Para mayor comprensión véanse las figuras 313 y 314. 218 MANTENIMIENTO INDUSTRIAL También puede efectuarse por otro procedimiento denominado red resistiva R, 2R. En este sistema a cada bit de salida se le conecta una resistencia de valor 2R, al otro extremo de las resistencias se coloca otra de valor R. En esta red el valor óhmico de las resistencias denominadas R es el que determina el valor de 2R, que evidentemente será el valor doble de R. Este sistema tiene la ventaja respecto al sistema de resistencias ponderadas que emplea únicamente dos valores distintos de resistencias, siendo R un valor cualquiera. La salida analógica se toma después de la resistencia en serie del bit de mayor peso. El sistema posee un registro de cuatro bits que puede ser cargado con cualquier valor binario. En sus salidas se conecta la red R, 2R. En la salida de la red se encontrará instantáneamente el valor analógico de tensión correspondiente al dato hexadecimal que está entregando el registro. Dado que el registro de nuestro ejemplo es de cuatro bits, la red R, 2R será capaz de entregar hasta 16 niveles distintos de tensión. Si se cargaran de forma consecutiva en el registro los valores hexadecimales del O al F, la red R, 2R entregaría su salida una rampa lineal escalonada. Conversores A/D La conversión analógica-digital consiste en convertir valores analógicos en digitales. En esencia es el proceso inverso a la conversión digital-analógica. En la conversión A/D a cada valor de la entrada, o mejor, a cada margen de valores analógicos le corresponde un valor digital a la salida, dado que dentro del citado margen de valores analógicos que le corresponden a cada valor binario de salida, el dispositivo siempre tomará uno de ellos, lo que establece una cierta imprecisión en la conversión; por lo que siempre se le atribuye a ésta el error de ±1 dígito, lo que determina, entre otras razones de diseño, que si se desea mayor precisión habrá que aumentar el número de bits de salida en la conversión, atribuyéndosele siempre al bit de menor peso el error constante de ±1. Figura 315 219 MANTENIMIENTO INDUSTRIAL MEDICIONES 1.- Presión La medición de presión, junto a la de temperatura y nivel, son las variables de proceso más utilizadas en los procesos industriales. La presión se define como fuerza ejercida sobre una superficie por unidad de área. En ingeniería, el término presión se restringe generalmente a la fuerza ejercida por un fluido por unidad de área de la superficie que lo encierra. De esta manera, la presión (P) de una fuerza (F) distribuida sobre un área (A), se define como: 𝑃= 𝐹 𝐴 Existen muchas razones por las cuales en un determinado proceso se debe medir presión. Entre estas se tienen: • Calidad del producto, la cual frecuentemente depende de ciertas presiones que se deben mantener en un proceso. • Por seguridad, como por ejemplo, en recipientes presurizados donde la presión no debe exceder un valor máximo dado por las especificaciones del diseño. • En aplicaciones de medición de nivel. • En aplicaciones de medición de flujo. La presión puede medirse de dos maneras, la primera en términos absolutos, y la segunda en términos relativos. 220 MANTENIMIENTO INDUSTRIAL La presión absoluta se mide con relación al cero absoluto o vacío total. La presión relativa se mide con respecto a la presión atmosférica, es decir, su valor cero corresponderá al valor de la presión absoluta atmosférica. La presión atmosférica es la que ejerce la masa de aire de la atmósfera terrestre sobre su superficie, medida mediante un barómetro. A nivel del mar, la presión atmosférica es de aproximadamente 760 mm de Hg absolutos, que es equivalente a 14,7 psi. Otro tipo de medida de esta variable, frecuentemente usada es la presión diferencial, que consistirá en la medida de la misma entre dos puntos de un proceso. La presión de vacío es aquella que se mide como la diferencia entre una presión atmosférica y la presión absoluta (cero absoluto). Presión manométrica. Es la presión medida con referencia a la presión atmosférica la diferencia entre la presión medida y la presión atmosférica real. Como ésta es variable, la comparación de valores medidos en diferentes intervalos de tiempo, resulta incierta. Presión hidrostática. Es la presión existente bajo la superficie de un líquido, ejercida por el mismo. Presión de línea. Es la fuerza ejercida por el fluido, por unidad de superficie, sobre las paredes de una conducción por la que circula. Presión diferencial. Es la diferencia entre un determinado valor de presión y otro utilizado como referencia. En cierto sentido, la presión absoluta podría considerarse como una presión diferencial que toma como referencia el vacío absoluto, y la presión manométrica como otra presión diferencial que toma como referencia la presión atmosférica. En el sistema Internacional de Unidades, la unidad de medida de presión es el Pascal (Pa), que se define como la fuerza ejercida por un Newton (N) sobre un área de un metro cuadrado (m2). O sea, Pa = N/m2. Esta es una unidad de presión muy pequeña, pero el kilo pascal (KPa), 1.000 Pa, permite expresar fácilmente los rangos de presión comúnmente más usados en la industria. Otras de las unidades utilizadas son el Kilogramo por centímetro cuadrado (Kg/cm2); libras por pulgada cuadrada (Psi); bar, y otros. En la tabla 63 se presentan los factores de conversión entre las unidades de presión más comunes. 221 MANTENIMIENTO INDUSTRIAL Tabla 63.- Factores de conversión para unidades de presión. En este epígrafe se estudiarán los principales métodos o principios mecánicos y electromecánicos utilizados en la medición de presión. También se hará una breve descripción sobre transmisores e interruptores de presión. Instrumentos para medición de la presión a. Instrumentos mecánicos Los instrumentos mecánicos utilizados para medir presión cuyas características se resumen en la tabla 64, pueden clasificarse en: � Columnas de Líquido: • Manómetro de Presión Absoluta. • Manómetro de Tubo en U. • Manómetro de Pozo. • Manómetro de Tubo Inclinado. • Manómetro Tipo Campana. 222 MANTENIMIENTO INDUSTRIAL � Instrumentos Elásticos: • Tubos Bourdon. • Fuelles. • Diafragmas. b. Instrumentos electromecánicos y electrónicos Los instrumentos electromecánicos y electrónicos utilizados para medir presión pueden clasificarse en: • Transmisores electrónicos de equilibrio de fuerzas. • Medidores de Esfuerzo (Strain Gages) • Transductores de Presión Resistivos • Transductores de Presión Capacitivos • Transductores de Presión Magnéticos • Transductores de Presión Piezoeléctricos c. Elementos Electrónicos de vacío Los elementos electrónicos de vacío se emplean para la medición de alto vacío, son altamente sensibles y se clasifican: • Mecánicos • Medidor de McLeod • Térmicos • De Ionización 223 MANTENIMIENTO INDUSTRIAL Descripción de los instrumentos de medir presión a-1. Columnas de líquido Estos instrumentos se conocen principalmente como “Manómetros”. En ellos la presión aplicada se balancea contra una columna de líquido. La forma más simple consiste de un tubo vertical sellado en un extremo, que contiene líquido; por el otro extremo se aplica la presión que se quiere medir. El líquido sube en el tubo hasta que el peso de la columna balancea la presión aplicada. Estos instrumentos encuentran su mayor aplicación en laboratorios y como patrones para calibración de otros instrumentos de presión. El líquido utilizado depende del rango de presión a medir, pero generalmente se emplea agua, compuestos orgánicos y mercurio. A continuación se mencionan varios tipos de medidores de columnas de líquido: • Manómetro para medición de Presión Absoluta: es simplemente un tubo en "U" que tiene un extremo sellado y al vacío y el otro extremo abierto a la presión absoluta que se va a medir, figura 317 (a). La ecuación que permite calcular el balance estático del instrumento es: 𝑃 = ∙ 𝑠𝑔 Donde: P : Presión Absoluta h : Diferencia de altura en los dos cuerpos del tubo sg : Gravedad específica del líquido 224 MANTENIMIENTO INDUSTRIAL • Manómetro de tubo en "U": se utiliza para medir presión diferencial. Consiste en un tubo en forma de "U" lleno de líquido. En cada una de las ramas del tubo se aplica una presión. La diferencia de altura del líquido en las dos ramas es proporcional a la diferencia de presiones. Un esquema característico puede verse en la figura 317 (b). • Manómetro de Pozo: en este tipo de manómetro una de las columnas del tubo en "U" ha sido sustituida por un reservorio o pozo de gran diámetro, de forma tal que la presión diferencial es indicada únicamente por la altura del líquido en la rama no eliminada del tubo "U". Un ejemplo es mostrado en la figura 318. Figura 318.- Manómetro de pozo • Manómetro de Tubo Inclinado: se utiliza para mediciones de presiones diferenciales pequeñas. En este tipo de manómetro, la rama del tubo de menor diámetro esta inclinada con el objeto de obtener una escala mayor, ya que en este caso h = L sen Ø, figura 319. Figura 319.- Manómetro de tubo inclinado 225 MANTENIMIENTO INDUSTRIAL • Manómetro de Tipo Campana: este tipo de sensor es una campana invertida dentro de un recipiente que contiene un líquido sellante. La campana está parcialmente sumergida en el líquido. La señal de mayor presión se aplica sobre el interior de la campana invertida; la señal de menor presión se aplica sobre el interior del recipiente que contiene el líquido. El movimiento vertical de la campana es proporcional al diferencial de presión. Para un balance estático puede utilizarse la siguiente ecuación: 𝑃2 − 𝑃1 = 𝐾𝑟 ∙ 𝐴 Donde: Kr : Constante del resorte h : Desplazamiento de la campana A : Área del interior de la campana P2-P1 : Diferencial de presión Figura 320.- Manómetro de Tipo Campana a-2. Instrumentos elásticos Existen tres tipos de instrumentos elásticos principales utilizados para medir presión. Ellos son: • Tubos Bourdon. • Fuelles. • Diafragmas. Básicamente están diseñados bajo el principio que establece la deflexión que sufre un elemento elástico que es proporcional a la presión aplicada. En la tabla 64 se 226 MANTENIMIENTO INDUSTRIAL indican los diferentes tipos de instrumentos elásticos, sus rangos óptimos de operación y precisión. • Tubos Bourdon: Funcionan bajo el siguiente principio mecánico: un tubo enrollado, cerrado por un extremo, tiende a enderezarse cuando por el otro extremo del tubo se le aplica un gas o líquido bajo presión. Cuando el enrollado "Coil" se diserta correctamente y el material utilizado también es el correcto, la deformación que sufre el tubo, debido a la presión aplicada, es altamente repetitiva, pudiendo el sensor ser calibrado para producir precisiones que en muchos casos alcanzan 0,05% del span. Tal como se muestra en la figura 321, el movimiento del extremo libre del tubo Bourdon se convierte, por medio de engranajes y eslabones, en un movimiento proporcional de una aguja o una plumilla del indicador o registrador. El movimiento de tubo Bourdon también puede ser acoplado electrónicamente a un transmisor o transductor. Materiales de construcción: los tubos Bourdon pueden fabricarse de varios materiales, entre los cuales se tiene: acero inoxidable 316 y 403, Cobre Berilio, K Monel, Monel y Bronce Fosforado. El material seleccionado determina tanto el rango como la resistencia del tubo a la corrosión. Por ejemplo, un tubo espiral de bronce es adecuado para presiones hasta 300 psig, mientras que uno de acero, puede manejar presiones de hasta 4.000 psig. Figura 321.- Principio de operación del tubo Bourdon • Tubo Bourdon tipo ―C‖: consiste en un tubo de sección elíptica que forma un arco de 250º (ver figuras 321 y 322). Cualquier presión en el tubo por encima de la extrema o atmosférica produce en el tubo un cambio en su perfil, pasando a tener una 227 MANTENIMIENTO INDUSTRIAL sección más circular, acompañada de un enderezamiento del tubo. Se utilizan principalmente para indicación local en medidores de presión, que están conectados directamente sobre recipientes de proceso y tuberías. Figura 322.- Tubo Bourdon tipo ―C‖ Como se observa en la figura 322; mediante la posición entre el piñón y el índice se ajusta el cero, mediante L1 se ajusta la amplitud y con L2 se logra ajustar la no linealidad. • Tubo Bourdon en Espiral: se construyen enrollando el tubo, de sección transversal plana, en una espiral de varias vueltas en vez de formar un arco de 270° como en el tipo “C”. Este arreglo da al espiral un mayor grado de movimiento por unidad de cambio en la presión si se compara con el tubo Bourdon tipo "C", mejorando la precisión y la sensibilidad del elemento, ocupando un menor espacio. En la figura 323 podemos ver el bourdon espiral. Figura 323.- Tubo Bourdon en Espiral 228 MANTENIMIENTO INDUSTRIAL • Tubo Bourdon Helicoidal: se construye de forma similar al tubo en espiral, pero enrollando el tubo en forma helicoidal, con la diferencia de que las espiras se encuentran en planos diferentes y paralelos. En la figura 324 podemos ver los tres tipos de tubos Bourdon. Figura 324.- Tipos de tubos Bourdon Aplicaciones: los tubos Bourdon se utilizan como instrumentos de medición directa y como instrumentos de presión en ciertos tipos de controladores, transmisores y registradores. El tipo de Bourdon utilizado se determina principalmente por el espacio disponible en la caja del instrumento. Como una regla general, el tubo Bourdon tipo “C”, es el menos sensible y el espiral es el más sensible. Ventajas y desventajas: entre las ventajas y desventajas de los medidores de presión de tubo Bourdon se incluyen: • Ventajas Bajo costo. Construcción simple. Cobertura de rangos bajos y altos. Una buena relación precisión/costo. Muchos años de experiencia en su aplicación. 229 MANTENIMIENTO INDUSTRIAL • Desventajas Pérdida de precisión por debajo de 50 psig. Usualmente requieren amplificación, la cual introduce histéresis. • Fuelles: Un fuelle puede definirse como un tubo flexible, el cual cambia su longitud de acuerdo a la presión aplicada. Este cambio de longitud es mucho mayor que el que se obtendría si se utilizara un tubo Bourdon de las mismas características. En muchas aplicaciones el fuelle se expande muy poco, pero la fuerza que produce es significativa. Esta técnica se emplea frecuentemente en mecanismos de balance de fuerzas. Para producir una relación lineal entre el desplazamiento del fuelle y la presión aplicada, es práctica común colocar un resorte dentro del fuelle, tal como se muestra en la figura 325. La utilización de un fuelle con un resorte tiene varias ventajas: el procedimiento de calibración se simplifica, ya que el ajuste se hace únicamente sobre el resorte. Un resorte construido a partir de un material estable presentará estabilidad por un largo tiempo, lo cual es esencial en cualquier componente. Cuando se requiere medir presión absoluta o diferencial se utilizan mecanismos especiales formados por dos fuelles, uno de los cuales actúa como compensación o referencia. Los fuelles pueden ser metálicos o no metálicos. Los rangos típicos, cuando se utilizan fuelles de bronce o de acero inoxidable, van desde 0-100 mm Hg (abs.) hasta 060 in Hg (abs.). Aplicaciones: los fuelles se utilizan en aplicaciones de medición de presión absoluta y medición de presión diferencial. Además, son parte importante en instrumentos tales como transmisores, controladores y registradores. Figura 325.- Manómetro de tiro del tipo de fuelle 230 MANTENIMIENTO INDUSTRIAL Hay que señalar que los elementos de fuelle se caracterizan por su larga duración, demostrada en ensayos en los que han soportado sin deformación alguna millones de ciclos de flexión. • Diafragmas: El principio de operación es similar al de los fuelles, pero su construcción es diferente. El diafragma es un disco flexible generalmente con corrugaciones concéntricas, tal como se muestra en la figura 326.a. Los diafragmas pueden ser metálicos y no metálicos. Entre los materiales comúnmente más utilizados se encuentran: bronce, cobre-berilio, acero inoxidable, Monel, neopreno, siliconas y teflón. El diafragma puede ser utilizado independientemente como un sensor de presión, pero también es componente básico de un elemento conocido como “cápsula”, figura 326.b. Una “cápsula” está formada por dos diafragmas unidos alrededor de su periferia. Existen dos tipos de cápsulas: convexas en las cuales la orientación de las corrugaciones de los dos diafragmas es opuesta; y tipo “nido” (nested) donde la orientación de las corrugaciones coincide. La cápsula de diafragma es utilizada por los transmisores neumáticos y electrónicos de diferencial de presión. Aplicaciones: los diafragmas se emplean en medición de bajas presiones y vacío; y en mediciones de presión absoluta y diferencial. En la medida de presiones de fluidos corrosivos pueden emplearse elementos primarios elásticos con materiales especiales en contacto directo con el fluido. Sin embargo, en la mayoría de los casos es más económico utilizar un fluido de sello cuando el fluido es altamente viscoso y obtura el elemento (tubo Bourdon, por ejemplo), o bien, cuando la temperatura del proceso es demasiado alta. Tal ocurre en la medición 231 MANTENIMIENTO INDUSTRIAL de presión del vapor de agua en que el agua condensada aísla el tubo Bourdon de la alta temperatura del vapor (fig. 327 a). Se emplean asimismo sellos volumétricos de diafragma y de fuelle (fig. 327 b y c) que contienen un líquido incompresible para la transmisión de la presión. Figura 327.- Tipos de sellos b. Instrumentos electrónicos Una desventaja común que presentan los instrumentos mecánicos, es el método utilizado para transmitir el movimiento del elemento de medición de presión a un indicador, tal como un puntero o una plumilla. Un eslabón mecánico, sufre de desgaste, tiene un alto grado de histéresis, lo cual limita la precisión, velocidad de respuesta y repetitividad de la medición. Los avances en la tecnología electrónica han dado la respuesta a este problema, censando electrónicamente el movimiento del elemento de medición de presión. El resultado de esto es: respuesta mucho más rápida, menor desgaste e histéresis, mejor compensación de la temperatura, y una salida, la cuál es una señal eléctrica proporcional al movimiento del elemento de presión. Esta señal puede ser aplicada y condicionada luego para que reúna los requerimientos del sistema de control. La mayoría de los instrumentos electromagnéticos de presión, incorporan uno de los instrumentos primarios de medición de presión discutidos previamente (instrumentos elásticos). El hecho de que la energía del proceso sea transformada en una señal eléctrica, a partir de un movimiento mecánico, hace que a estos instrumentos se les dé el nombre de “Transductores”. 232 MANTENIMIENTO INDUSTRIAL Entre estos instrumentos electromagnéticos utilizados para medir presión se pueden mencionar: • Transmisores electrónicos de equilibrio de fuerzas. • Strain Gages o Extensómetros. • Transductores Resistivos. • Transductores Capacitivos. • Transductores Magnéticos. • Transductores Piezoeléctricos. La mayoría de los transductores de presión mencionados anteriormente, utilizan un circuito eléctrico básico, conocido como circuito de puente Wheatstone. Algunas características de un circuito de puente de Wheatstone son: La figura 328 muestra un diagrama básico de un circuito de un puente de Wheatstone. Los cuatro elementos del puente pueden ser inductancias, capacitadores o resistencias. Para la medición de presión, generalmente se utilizan resistencias. En cualquiera de estos casos, un pequeño cambio en una de las resistencias del puente produce un cambio instantáneo del voltaje a través de los extremos del puente. De este modo, el voltaje de salida, es una función de voltaje de entrada y de las resistencias del puente. Tomando como referencia la figura 328 se tiene: 𝐸𝑜𝑢𝑡 = 𝐸𝑖𝑛 𝑅𝑡 𝑅3 − 𝑅𝑡 + 𝑅1 𝑅2 + 𝑅3 Si las resistencias de los cuatro elementos del puente son afectadas por la temperatura en la misma forma, cualquier cambio tiende a balancearlas evitando errores inducidos por variaciones en la temperatura, los cuales, de otro modo, se detectarían como un cambio en la presión. 233 MANTENIMIENTO INDUSTRIAL Si la salida de un sensor de presión se transmite a una de las ramas del puente, el desbalance resultante en el voltaje debido a una variación de presión, puede ser amplificado, escalado y calibrado en unidades de presión. Ciertos semiconductores, tales como la silicona, son piezoresistivos (cambios en la resistencia debido a esfuerzo). De este modo las resistencias de un circuito del puente de Wheatstone pueden ser implantadas, o "difundidas" en un circuito muy pequeño (chip). Si esto se conecta apropiadamente a un sensor de presión tipo diafragma, proporcionará una señal analógica repetitiva, proporcional a la presión aplicada al diafragma. • Transmisores electrónicos de equilibrio de fuerzas: En la figura 329 está representado un transmisor de este tipo. En este instrumento el elemento mecánico de medición (tubo Bourdon, espiral, fuelle...) ejerce una fuerza sobre una barra rígida del transmisor. Figura 329.- Transmisor electrónico de equilibrio de fuerzas 234 MANTENIMIENTO INDUSTRIAL Para cada valor de la presión, la barra adopta una posición determinada excitándose un transductor de desplazamiento tal como un detector de inductancia, un transformador diferencial o bien un detector fotoeléctrico. Un circuito oscilador asociado con cualquiera de estos detectores alimenta una unidad magnética y la fuerza generada reposiciona la barra de equilibrio de fuerzas. Se completa así un circuito de realimentación variando la corriente de salida en forma proporcional al intervalo de presiones del proceso. En el transmisor de equilibrio de fuerzas con detector fotoeléctrico (fig. 336 c), la barra rígida tiene en su extremo una ventanilla ranurada que interrumpe total o parcialmente un rayo de luz que incide en una célula fotoeléctrica de dos elementos. Esta célula forma parte de un circuito de puente de Wheatstone autoequilibrado y, por lo tanto, cualquier variación de presión que cambie la barra de posición, moverá la ventana ranurada y desequilibrará el puente. La señal diferencial que se produce en los dos elementos de la célula es amplificada y excita un servomotor. Éste, al girar, atornilla una varilla roscada la cual comprime un resorte de realimentación que a su vez aprieta la barra de equilibrio de fuerzas con una fuerza tal que compensa la fuerza desarrollada por el elemento de presión. De este modo, el sistema se estabiliza en una nueva posición de equilibrio. Este transmisor dispone de un contador óptico-mecánico acoplado al servomotor que señala los valores de presión en una pantalla exterior. Los transductores electrónicos de equilibrio de fuerzas se caracterizan por tener un movimiento muy pequeño de la barra de equilibrio, poseen realimentación, una elasticidad muy buena y un nivel alto en la señal de salida. Por su constitución mecánica presentan un ajuste del cero y del alcance (span) complicado y una alta sensibilidad a vibraciones y su estabilidad en el tiempo es de media a pobre. Su intervalo de medida corresponde al del elemento mecánico que utilizan (tubo Bourdon, espiral, fuelle, diafragma...) y su precisión es del orden de 0,5-1 %. • Strain Gage (Galgas Estensométricas): los transductores de presión tipo Strain Gage proporcionan un medio conveniente y confiable para medir presión de gases y líquidos. Son especialmente adecuados para ser utilizados en sistemas viscosos y corrosivos. Un Strain Gage (galga estensométrica), es un mecanismo que utiliza el cambio de la resistencia eléctrica de un alambre o elemento semiconductor de resistencia, sometido a esfuerzo, para medir presión. El Strain Gage cambia un movimiento mecánico en una señal eléctrica cuando la resistencia varía por compresión o tensión. El cambio en la resistencia es una medida de la presión que produce la distorsión mecánica. La figura 330 ilustra el principio de operación de un Strain Gage. 235 MANTENIMIENTO INDUSTRIAL Independientemente del tipo de Strain Gage utilizado, casi siempre se emplea un circuito eléctrico con un puente de Wheatstone. La variación en la resistencia cambia el voltaje de salida del puente. Esta señal frecuentemente requiere compensación por cambios en la temperatura del proceso. El método más común para realizar esta compensación, es utilizando una resistencia de compensación en el puente de Wheatstone. Ventajas: Muy buena exactitud (0,1 %). No sensible a golpes y vibración. Rango entre 10 y 10.000 psi. Excelente estabilidad. Buena repetitividad. Efecto de temperatura despreciable si se compensa. Desventajas: Limitaciones por alta temperatura. Requiere compensación por temperatura. Requiere fuente de poder externa. Requiere conversión de señal. 236 MANTENIMIENTO INDUSTRIAL • Transductores resistivos: Estos transductores operan bajo el principio de que un cambio en la presión produce un cambio en la resistencia del elemento sensor. Están constituidos por un elemento elástico (tubo Bourdon, fuelle, diafragma), el cual hace variar la resistencia de un potenciómetro en función de la presión. La figura 331 muestra dos tipos de transductores resistivos. En uno de ellos el elemento sensor lo constituye un fuelle y el otro un diafragma. La figura 332 muestra un tipo de transductor resistivo en el cual no se utiliza un elemento elástico como sensor. En este caso, la variación en la resistencia se produce por una variación en la temperatura. El principio de operación es el siguiente: se hace pasar corriente eléctrica a 237 MANTENIMIENTO INDUSTRIAL través de un filamento colocado en una cámara presurizada; por efecto de esta corriente el filamento se calienta. La temperatura del filamento y por consiguiente su resistividad varían inversamente con la presión del gas. El elemento sensor está constituido por dos bulbos o cámaras presurizadas: una de medición, y otra de referencia. El elemento resistivo está constituido por un filamento de platino o tungsteno. Este tipo de medidor se puede utilizar para medir densidad, presión o velocidad de gases. Su construcción es simple y no requiere de amplificación. • Transductores Capacitivos: La figura 333 muestra un sensor de presión que utiliza capacitancias en vez de resistencias como elementos del puente de Wheatstone. En este caso, el elemento sensor es un diafragma que está en contacto con la presión del proceso. Cuando la presión aplicada produce una deflexión en el diafragma, la capacitancia del elemento cambia en proporción a la presión aplicada; ya que la capacitancia es función del material dieléctrico entre las placas del capacitor y de las distancias entre las placas. Este cambio en la capacitancia produce un cambio en la señal de voltaje d.c. del circuito del puente. Esta variación de voltaje se convierte en una señal estándar de 4-20 mA. Estos transductores pueden censar presiones bajas, se usan frecuentemente en transmisores de presión manométrica así como diferencial y en aplicaciones de medición de presión, flujo y nivel. Ventajas: Muy buenos para medir presiones bajas. Construcción rígida. No es afectado por vibración. Desventajas: Sensibles a la temperatura. Se requiere electrónica adicional para producir una señal de salida estándar. Requiere fuente de poder externa. 238 MANTENIMIENTO INDUSTRIAL • Transductores magnéticos: Existen dos tipos, los de inductancia variable y los de reluctancia variable. ▫ Transductores de Inductancia Variable: Utilizan una bobina con un núcleo magnético móvil. La inductancia en la bobina varía proporcionalmente según la posición que ocupe el núcleo dentro de la bobina. De este modo, variaciones de presión sobre el sensor producen cambios en la posición del núcleo, lo que a la vez origina un cambio en la inductancia (figura 334). Este tipo de sensor ha venido siendo utilizado para detectar pequeños desplazamientos de cápsulas y otros instrumentos. ▫ Transductores de Reluctancia Variable: En este caso existe un electroimán que crea un campo magnético dentro del cual se mueve una armadura de material magnético. El circuito magnético se alimenta de una fuerza magnetomotriz constante, de este modo, al variar la presión en el sensor, varía la posición de la armadura produciéndose un cambio en la reluctancia y por lo tanto el flujo magnético. Los dos tipos de transductores magnéticos utilizan como sensor un elemento elástico y circuitos eléctricos constituidos por un puente de Wheatstone. 239 MANTENIMIENTO INDUSTRIAL Aplicaciones: estos transductores se utilizan en algunos instrumentos para medición de presión absoluta, manométrica y diferencial, y en aplicaciones de medición, flujo y nivel. También se utilizan en ciertos convertidores presión/voltaje. • Transductores piezoeléctricos: La piezoelectricidad se define como la producción de un potencial eléctrico debido a la presión sobre ciertas sustancias cristalinas como el cuarzo, titanato de bario, etc. En un sensor piezoeléctrico la presión aplicada sobre varios cristales producen una deformación elástica. Un semiconductor piezoresistivo se puede describir como un elemento que produce un cambio en la resistencia, causado por un esfuerzo aplicado sobre un diafragma. De esta manera, resistencias de estado sólido se pueden utilizar como instrumentos de presión, del mismo modo que los alambres de un Strain Gage, pero con varias ventajas. La alta sensibilidad o factor de medida es aproximadamente 100 veces mayor que en los Strain Gages de alambre. Las piezoresistencias están difundidas en un medio homogéneo de silicona cristalino. De esta manera, las resistencias están integradas al elemento sensor. La figura 336 muestra un corte transversal del elemento sensor con los cables soldados a los contactos metálicos. El elemento sensor está formado por cuatro piezoresistencias iguales difundidas o ensambladas en la superficie del diafragma delgado de silicona. Contactos de oro en la superficie del diafragma de silicona proveen la conexión a las piezoresistencias. Un cambio en la presión hace que el diafragma se deforme, induciendo un esfuerzo en él y también en la resistencia. El valor de la resistencia cambiará dependiendo de la cantidad de presión aplicada al diafragma. Los transductores de presión estudiados anteriormente pueden ser utilizados para medir presiones absolutas, diferenciales o manométricas. En la tabla 64 se resumen los rangos de operación y exactitudes aproximadas para estos tipos de instrumentos, así como los campos de aplicación en la figura 337. 240 MANTENIMIENTO INDUSTRIAL Figura 337.- Instrumentos de presión y campo de aplicación c. Elementos Electrónicos de vacío Los elementos electrónicos de vacío se emplean para la medición de alto vacío, son altamente sensibles y se clasifican: 241 MANTENIMIENTO INDUSTRIAL Los medidores Electrónicos-Mecánicos de vacío, constan de un fuelle y un diafragma conectados, midiendo la diferencia de presiones entre las presiones atmosféricas y la del proceso. Pueden estar compensados con relación a la presión atmosférica y calibrados en unidades absolutas. Al ser dispositivos mecánicos, las fuerzas disponibles a presiones del gas muy bajas son tan pequeñas que estos instrumentos no son adecuados para la medida de alto vacío estando limitados a valores de 1 mm Hg abs. Pueden llevar acoplados transductores eléctricos del tipo de galga extensométrica o capacitivos. El medidor de McLeod, que es usado como instrumento de calibración de muchos otros instrumentos, se basa en comprimir una muestra del gas a un volumen más pequeño mayor que la atmosférica, para luego deducir la presión original mediante la aplicación de la ley de Boyle. Su intervalo de medida es de 5-10-5 mm Hg Los transductores térmicos se basan en el principio de la proporcionalidad entre la energía disipada desde la superficie caliente de un filamento calentado por una corriente constante y la presión del gas ambiente cuando el gas está a bajas presiones absolutas. El transductor térmico de termopar contiene un filamento en V que lleva incorporado un pequeño termopar (fig. 338). Al pasar una corriente constante a través del filamento, su temperatura es inversamente proporcional a la presión absoluta del gas. La f.e.m. generada por el termopar indica la temperatura del filamento y por lo tanto señala el vacío del ambiente. Para compensar la temperatura ambiente se emplea una segunda unidad contenida dentro de un tubo sellado al vacío. La señal de salida diferencial de los dos termopares es proporcional a la presión. Figura 338 Las ventajas principales de este tipo de transductor residen en su bajo coste, larga duración y confiabilidad. Tiene el inconveniente de ser sensible a la composición del gas, poseer características no lineales y presentar el riesgo de combustión si se 242 MANTENIMIENTO INDUSTRIAL expone a presión atmosférica cuando el filamento está caliente. Su intervalo de medida es de 0,5-10-3 mm Hg El transductor Pirani (fig. 339) utiliza un circuito de puente de Wheatstone que compara las resistencias de dos filamentos de tungsteno, uno sellado en alto vacío en un tubo y el otro en contacto con el gas medido y que por lo tanto pierde calor por conducción. En este transductor es la resistencia del filamento la que refleja la presión en lugar de ser su temperatura. Figura 339.- Transductor Pirani El transductor Pirani tiene la ventaja de ser compacto y sencillo de funcionamiento, pudiendo estar a presión atmosférica sin peligro de combustión. Tiene el inconveniente de que su calibración depende de la composición del gas medido y de ser altamente no lineal. Su intervalo de medida es de 2-10-3 mm Hg El transductor bimetálico (fig. 340) utiliza una espiral bimetálica calentada por una fuente de tensión estabilizada. Cualquier cambio en la presión produce una deflexión de la espiral, que a su vez está acoplada a un índice que señala en la escala el vacío. Su intervalo de medida es de 1-10-3 mm Hg Figura 340.- Transductor bimetálico 243 MANTENIMIENTO INDUSTRIAL Los transductores de Ionización utilizan el principio que habla de la formación de iones que se producen en las colisiones que existen entre moléculas y electrones (o bien partículas alfa en el tipo de radiación). La formación de estos iones variara directamente proporcional con la presión, en niveles muy bajos de presión absoluta. El transductor de filamento caliente (fig. 341) consiste en un tubo electrónico con un filamento de tungsteno rodeado por una rejilla en forma de bobina, la cual a su vez está envuelta por una placa colectora. Los electrones emitidos por el filamento caliente se aceleran hacia la rejilla positiva, pasan a su través y, en su camino hacia la placa colectora de carga negativa, algunos colisionan con moléculas del gas. La corriente positiva formada es una función del número de iones y, por lo tanto, constituye una medida de la presión del gas. Estos instrumentos son muy delicados y deben manejarse con cuidado. El filamento puede quemarse si se somete accidentalmente a presiones superiores a 1 x 10-3 mm Hg absolutos. Figura 341.- Transductor de filamento caliente Estos transductores son muy sensibles y capaces de medir vacíos extremadamente altos. Su señal eléctrica de salida es lineal con la presión. Tienen el inconveniente de ser sensibles a la composición del gas, de tal modo que en ocasiones el filamento caliente provoca cambios significativos en su composición entre el volumen medido y el volumen contenido dentro del tubo electrónico. El intervalo de medida de estos transductores es de 10-3 a 10-11 mm Hg El transductor de cátodo frío (fig. 342) se basa en el principio de la medida de una corriente iónica producida por una descarga de alta tensión. Los electrones desprendidos del cátodo toman un movimiento en espiral al irse moviendo a través de un campo magnético en su camino hacia el ánodo. El movimiento en espiral da lugar a que el camino libre medio entre electrones sea mayor que la distancia entre electrodos. Por consiguiente, aumenta la posibilidad de colisiones con las moléculas del gas presente lo que da lugar a una mayor corriente iónica y de este modo la descarga catódica se mantiene a una presión más baja, o sea a un vacío más alto. Este instrumento no puede vaciarse de gases tan rápidamente como el de filamento- caliente, pero es más 244 MANTENIMIENTO INDUSTRIAL robusto y no presenta el problema de la combustión del filamento. Es susceptible de contaminación por el mercurio y puede provocar la descomposición química de vapores orgánicos a altas tensiones. Su campo de aplicación abarca de 10-2 a 10-7 mm de Hg con una escala logarítmica. Figura 342.- Transductor de cátodo frío Interruptores de Presión Los interruptores de presión o presostatos, utilizan las mismas tecnologías que los manómetros, con la diferencia que se les incluye un contacto eléctrico calibrado a un valor de presión, de tal manera que dicho contacto cambia de estado cuando el valor de la presión llega a dicho valor. Figura 343.- Presostato 245 MANTENIMIENTO INDUSTRIAL 2.- Medición de flujos La medición de flujo es uno de los aspectos más importantes en el control de procesos; de hecho, bien puede ser la variable más comúnmente medida. Existen muchos métodos confiables y precisos para medir flujo. Algunos son aplicables solamente a líquidos, otros solamente a gases y vapores; y otros a ambos. El fluido puede ser limpio o “sucio”, seco o húmedo, erosivo o corrosivo. Las condiciones del proceso tales como presión, temperatura, densidad, viscosidad, etc., pueden variar. Todos estos factores afectan la medición y deben ser tomados en cuenta en el momento de seleccionar un medidor de flujo. Es necesario por lo tanto, conocer el principio de operación y características de funcionamiento de los diferentes medidores de flujo disponibles. Sin tal conocimiento, es difícil seleccionar el medidor más apropiado para una determinada aplicación. Las aplicaciones más habituales de este tipo de equipos en la industria consisten en: • Medir las cantidades de gases o líquidos utilizados en un proceso dado. • Controlar las cantidades adicionales de determinadas substancias aportadas en ciertas fases del proceso. • Mantener una proposición dada entre dos fluidos. • Medir el reparto de vapor en una planta, etc. Como hemos dicho, en numerosos procesos industriales, los equipos para la medida de caudal constituyen la parte más importante de la instrumentación. El valor de un caudal se determina generalmente midiendo la velocidad del fluido que por una conducción de una sección determinada. Mediante éste procedimiento indirecto. , lo que se mide es el caudal volumétrico Qv, que en su forma más simple, sería: Qv = A x V donde A es la sección transversal del tubo y V la velocidad lineal del fluido. Una medición fiable del caudal dependerá pues de la medición correcta de los valores A y V. Si, por ejemplo, aparecen burbujas en el fluido, el término A de la ecuación seria artificialmente alto. De igual forma, si se mide la velocidad como el desplazamiento de un punto situado en el centro del tubo y se introduce en la ecuación anterior, el caudal Qv calculado seria mayor que el real, debido a que V debe reflejar la velocidad media de todo el frente del fluido al paso de una sección transversal del tubo. 246 MANTENIMIENTO INDUSTRIAL Existen varios métodos para medir el caudal según sea el tipo de caudal volumétrico o másico deseado. A continuación se da una clasificación de los mismos según el principio de funcionamiento: y en la siguiente gráfica se incluye una representación de las diferentes tecnologías empleadas en la medición de flujos y su porcentaje de utilización. 247 MANTENIMIENTO INDUSTRIAL Factores que afectan el flujo de un fluido a través de una tubería Los factores que mayormente afectan el flujo de un fluido a través de una tubería son: • La velocidad. • La fricción del fluido en contacto con la tubería. • La viscosidad. • La densidad (gravedad específica). • La temperatura. • La presión. a. Velocidad del fluido (V) Un fluido en una tubería se puede mover de acuerdo a un patrón de flujo determinado, dependiendo en alto grado, de su velocidad. Estos patrones de flujo se conocen como “laminar” y “turbulento”. El flujo laminar es referido, algunas veces, como un flujo viscoso que se distingue por que las moléculas del fluido siguen trayectorias paralelas cuando el fluido se mueve a través de la tubería, tal como se muestra en la figura 344. El flujo turbulento, por otra parte, se caracteriza por patrones erráticos debido a que la turbulencia crea remolinos que mueven las moléculas del fluido a lo largo de trayectorias irregulares, tal como se muestra en la figura 344. El término de velocidad, cuando se aplica al flujo de fluido en tuberías se refiere a la velocidad promedio del mismo fluido. Se debe utilizar la velocidad promedio ya que la velocidad del fluido varía a través de la sección transversal de la tubería. 248 MANTENIMIENTO INDUSTRIAL La velocidad del fluido depende de la presión que le empuja por la tubería. Cuando mayor sea dicha presión, más alta será la velocidad de circulación (siempre que los demás factores permanezcan constantes) y por consiguiente, mayor resultará el caudal volumétrico. El tamaño de la tubería también afecta al caudal. Si duplicamos, por ejemplo, el diámetro de la tubería, se multiplica por cuatro la capacidad potencial de caudal en la misma. b. Fricción del fluido en contacto con la tubería La fricción de la tubería reduce la velocidad del fluido, por lo tanto, se considera un factor negativo. Debido a esta fricción, la velocidad del fluido es menor cerca de la pared que en el centro de la tubería, mientras más lisa es la tubería, menor es el efecto de la fricción sobre la velocidad del fluido. La ecuación de Darcy permite calcular la pérdida por fricción en pie de fluido. = 𝑓𝐿 𝐷 𝑉2 2𝑔 Donde: D : Diámetro de la tubería (pies). L : Longitud de la tubería (pies). V : Velocidad del fluido (pies/seg.). f : Factor de fricción de Fanny. g : Constante de la gravedad (32,17 pies/seg2 ó 9,8 m./seg2). El factor de fricción f es una función del número de Reynolds y de la rugosidad de la tubería. c. Viscosidad del fluido (μ) Otro factor que afecta la velocidad de un fluido es la viscosidad (μ). La viscosidad es una medida cuantitativa de la tendencia del fluido a resistir la deformación. Los fluidos que fluyen libremente tienen viscosidades bajas; los fluidos que parecen resistir a fluir libremente tienen viscosidades altas. La viscosidad se mide en unidades de centipoise, (cp = grs. / cm. seg.) la cual es referida como una unidad de viscosidad absoluta. Otro tipo de viscosidad llamada viscosidad cinemática se expresa en unidades de centistokes. Se obtiene dividiendo los centipoises por la gravedad específica del fluido. Densidad = poises / Stokes 249 MANTENIMIENTO INDUSTRIAL Algunos medidores de flujo se calibran para un valor de la viscosidad del fluido que pasa por el medidor. Si la viscosidad cambia, también lo hace el factor de calibración, afectando la exactitud de la medición. Otros medidores de flujo, como los medidores que utilizan el principio de diferencial, tienen limitaciones de viscosidad. Esto se debe a que por encima de ciertos valores de viscosidad, los factores de flujo que intervienen en la ecuación del medidor, ya no pueden ser considerados constantes. La viscosidad de un líquido depende principalmente de su temperatura y en menor grado de su presión. La viscosidad de los líquidos generalmente disminuye al aumentar la temperatura y la viscosidad de los gases normalmente aumenta al aumentar la temperatura. La presión tiene muy poco efecto sobre la viscosidad de los líquidos. Su efecto sobre la viscosidad de gases solamente es significativo a altas presiones. Se puede afirmar que, generalmente, cuando mayor es la viscosidad de un fluido, menor será su velocidad, siempre que permanezcan los demás factores constantes. La densidad influye en el caudal, puesto que el fluido más denso requiere mayor fuerza de empuje para mantener un mismo caudal de paso. El hecho asimismo de los gases sean comprensibles y los líquidos no, hace que se precisen, por lo general, métodos distintos para la medición de líquidos, gases y líquidos que arrastren gases. d. Densidad del fluido (Gravedad específica) La densidad de una sustancia se define como su peso por unidad de volumen. La densidad de los líquidos cambia considerablemente con la temperatura, mientras que los cambios por variaciones en la presión son despreciables. La densidad de los gases y vapores es mayormente afectada por los cambios en la presión y la temperatura. Muchas mediciones de flujo se realizan sobre la base de mediciones de volumen, de modo que la densidad del fluido debe ser conocida o medida para determinar la verdadera masa de flujo. La gravedad específica (Sg) de un fluido es la relación de su densidad con respecto a una densidad patrón. El patrón para líquidos es el agua (ρ = 1 gr/cm3 a 4 °C y 1 atm). El patrón para gases es el aire (ρ = 1,29 gr/lt a 0°C y 1 atm). Se ha determinado que los factores de flujo más importantes pueden ser correlacionados juntos en un factor adimensional llamado el Número de Reynolds, el cual describe el flujo para todas las velocidades, viscosidades y diámetros de tubería. En general, el Número de Reynolds define la relación de la velocidad del fluido en función de su viscosidad. El número de Reynolds se expresa a través de la siguiente ecuación: 𝑅𝑒 = 𝜌𝑉𝐷 𝜇 250 MANTENIMIENTO INDUSTRIAL Donde: Re : Número de Reynolds D : Diámetro interno de la tubería ρ : Densidad del fluido μ : Viscosidad del fluido A bajas velocidades o altas viscosidades, Re es bajo y el fluido fluye en forma de suaves capas o láminas, con la velocidad más alta en el centro de la tubería y velocidades bajas cerca de la pared de la tubería donde las fuerzas viscosas lo retienen. Este tipo de flujo es llamado ―flujo laminar‖ y está representado por Números de Reynolds (Re) menores que 2.000. Una característica significativa del flujo laminar es la forma parabólica de su perfil de velocidad como puede verse en la figura 345. A altas velocidades o bajas viscosidades el fluido se descompone en turbulentos remolinos con la misma velocidad promedio en toda la tubería. En este “fluido turbulento” el perfil de velocidad tiene una forma mucho más uniforme. El flujo turbulento está representado por Números de Reynolds mayores que 4.000. En la zona de transición con Número de Reynolds entre 2.000 y 4.000 el flujo puede ser laminar o turbulento. e. Efectos de la presión y de la temperatura del fluido Los efectos de la presión y la temperatura ya han sido descritos en el análisis que se hizo sobre la densidad y la viscosidad. El método más común de medición de flujo, es decir, el método de diferencial de presión, supone que tanto la presión como la temperatura permanecen constantes. En algunas aplicaciones esta suposición es válida. En otras es necesario hacer compensación por cambios en la presión y/o temperatura del fluido. 251 MANTENIMIENTO INDUSTRIAL Instrumentos para medición del caudal Existen diversas formas de evaluar la cantidad de volumen o masa de un determinado fluido, que pasa por una tubería por unidad de tiempo. De lo anterior podemos deducir que existen dos tipos principales de medición de caudal, éstas son: - Caudales Volumétricos. - Caudales de masa o Másicos. Los volumétricos a su vez se subdividen en: -. Caudal por Presión Diferencial. -. Turbinas. -. Medidores de Desplazamiento Positivo. -. Rotámetros. Dentro de la medición por presión diferencial encontramos los elementos siguientes: -. Placa de Orificio -. Toberas -. Tubo de Venturi -. Uniwedge (Taylor) -. Tubo de Pitot -. Tubo Annubar Los cuatro primeros, se basan en el principio que puede demostrarse mediante la ecuación de Benoulli, para una restricción en el paso de fluido en una tubería, que cumplirá con la siguiente ecuación general: 𝐐 = 𝐊 ∗ 𝐏𝟏 − 𝐏𝟐 𝟏 𝟐 Donde: Q : Caudal de fluido. K : Constante de proporcionalidad. P1: Presión aguas arriba de la restricción. P2: Presión aguas abajo de la restricción. Los instrumentos de medición de caudales de masa, son de gran importancia en la industria, en razón del gran número de aplicaciones requeridas por este tipo de 252 MANTENIMIENTO INDUSTRIAL medición entre las cuales figuran: los balances de masa efectuados en un proceso complejo. Existen dos grandes grupos de mediciones de caudal de masa, que son: • Por Compensación de la Medida Volumétrica. • Por Medición Directa. La Compensación de la Medida Volumétrica, consiste en la adición de un transmisor de densidad al medidor de caudal volumétrico existente en un proceso, y luego, aplicando la siguiente ecuación obtendremos el caudal de masa: D = m/V m = V.D La implementación de este método se puede llevar a cabo mediante un transductor multiplicador, que permita la operación expuesta en la relación. La Medición Directa, se podrá realizar mediante una serie de elementos entre los cuales figuran: • Medidores Térmicos. • Medidores de Momento Angular. • Medidores por Frecuencia Natural de Oscilación. Medidores Térmicos. Se basan en el principio que establece que un cuerpo se calienta al pasar cerca de otro cuerpo a mayor temperatura. El sistema consiste en un manta de calentamiento aplicada en la parte exterior de la tubería que proporciona calor constante, y dos termocúplas conectadas aguas arriba y aguas abajo de dicha manta; cuando el caudal sea bajo, la transferencia de calor será más efectiva. Medidores de Momento Angular. Se basan en el principio de conservación del momento de los fluidos; éstos constan generalmente de una turbina que se encuentra acoplada a un medidor del momento angular. En términos comunes se puede decir, que el momento así medido será directamente proporcional al caudal de masa del fluido. Medidores por Frecuencia Natural de Oscilación. Medidor de caudal de masa directo que trabaja mediante el efecto que tienen las oscilaciones de frecuencia natural de vibración con respecto al caudal de masa que pasa 253 MANTENIMIENTO INDUSTRIAL por tramo de tubería que está construido con materiales de buena elasticidad y de una forma geométrica muy particular. La medición directa de la masa de flujo evita la necesidad de utilizar cálculos complejos y como estándar fundamental de medición, la masa no deriva sus unidades de otra fuente ni se ve afectada por variaciones de temperatura o presión; tal constancia hace a la masa, la propiedad ideal para medir. El primer Medidor de Flujo Másico (MFM) fue desarrollado por la compañía Micro Motion y funciona según el principio Coriolis. El medidor de Coriolis se basa en el teorema de Coriolis, matemático francés (1795-1843) que observó que un objeto de masa m que se desplaza con una velocidad lineal V a través de una superficie giratoria que gira con velocidad angular constante w, experimenta una velocidad tangencial (velocidad angular x radio de giro) tanto mayor cuanto mayor es su alejamiento del centro. Si el móvil se desplaza del centro hacia la periferia experimentará un aumento gradual de su velocidad tangencial, lo cual indica que se le está aplicando una aceleración, que es precisamente la aceleración de Coriolis. Este fenómeno es el causante de que el remolino que se forma en el fondo de un depósito al vaciarlo, gira a derechas en el hemisferio Norte y a izquierdas en el hemisferio Sur. Asimismo todos los vientos de la circulación general que soplan desde el Norte al Sur en el hemisferio Norte son desviados, debido a la rotación de la Tierra de Oeste a Este, constituyendo los vientos predominantes de oeste. Por otro lado, el célebre péndulo de Foucault demuestra también el fenómeno. Otro tipo de medidor de caudal másico es el “másico térmico”, que están basados en los principios de elevación de la temperatura del fluido en su paso por un cuerpo caliente y en la pérdida de calor experimentada por un cuerpo caliente inmerso en el fluido. Se reservan los medidores volumétricos para la medida general de caudal y se destinan los medidores de caudal másico a aquellas aplicaciones en que la exactitud de la medida es importante. Por otra parte, de acuerdo al principio de operación, los medidores de flujo pueden ser agrupados de la siguiente manera: • Medidores diferenciales (Head Meters). • Medidores de desplazamiento positivo. • Medidores de área variable. • Medidores volumétricos. • Medidores de flujo másico. 254 MANTENIMIENTO INDUSTRIAL La Tabla 65 muestra las características principales de varios tipos de medidores de flujo utilizados comúnmente en la industria petrolera y la Tabla 66 los tipos de transductores. 255 MANTENIMIENTO INDUSTRIAL 256 MANTENIMIENTO INDUSTRIAL Medidores de flujo diferenciales Los medidores de flujo de tipo diferenciales son los más comúnmente utilizados. Entre ellos pueden mencionarse: la placa de orificio, el tubo Venturi, el tubo Pitot, la tobera y el medidor de impacto (Target). Estos miden el flujo de un fluido indirectamente, creando y midiendo una presión diferencial por medio de una obstrucción al flujo. El principio de operación se basa en medir la caída de presión que se produce a través de una restricción que se coloca en la línea de un fluido en movimiento, esta caída de presión es proporcional al flujo. La proporcionalidad es una relación de raíz cuadrada, en la cual el flujo es proporcional a la raíz cuadrada del diferencial de presión. Esta relación hace que la medición de flujos menores del 30% del flujo máximo, no sea práctica debido a la pérdida de precisión. Los medidores de flujo de tipo diferencial generalmente están constituidos por dos componentes: el elemento primario y el elemento secundario. El elemento primario es el dispositivo que se coloca en la tubería para obstruir el flujo y generar una caída de presión. El elemento secundario mide la caída de presión y proporciona una indicación o señal de transmisión a un sistema de indicación o control. El elemento primario se calcula y se selecciona de acuerdo al fluido y las características del proceso. Se han desarrollado ecuaciones que toman en cuenta casi todos los factores que afectan la medición de flujo a través de una restricción. La ecuación básica a partir de la cual fueron desarrolladas estas ecuaciones, como se ha visto, es la ecuación de Bernoulli. 257 MANTENIMIENTO INDUSTRIAL Para el cálculo se recomiendan como referencia obligatoria las Normas: • 5167-1980 Medida del flujo de fluidos por medio de placas-orificio, toberas o tubos Venturi, insertados en conductos de sección circular. International Organization for Standardization, Ginebra, Suiza. • ASME 19.5 — Flowmeter Computation Handbook. American Society for Mechanical Engineers, New York, 1971 • A. P. I. 2530 — Septiembre 1985 para gas natural. • Principle and Practice of Flow Meter Engineering. L. K. Spink (1978) • Normas AGA-3 y AGA-7 – Gas Measurement Committee Report. American Gas Association, Cleveland, Ohio. En estas normas se indican las pérdidas de carga de los elementos y las condiciones de instalación en tramos rectos de las tuberías con distancias mínimas a codos, curvas, válvulas, etc. Cuando estas condiciones de distancia son críticas, se utilizan dispositivos llamados enderezadores de venas que dan un régimen laminar del fluido y permiten reducir el espacio recto necesario (fig. 347). Figura 347.- Diafragma. tobera y tubo Venturi 258 MANTENIMIENTO INDUSTRIAL a. Placas orificio La placa de orificio está constituida por una placa delgada perforada, la cual se instala en la tubería utilizando bridas especiales, las placas orificio se muestran en la figura 348. Generalmente se construye de acero inoxidable con un espesor que oscila entre 1/8 y 1/2 pulgada. Otros tipos de materiales tales como Monel, níquel, Hastelloy, se utilizan cuando se necesita prevenir la corrosión o contaminación. Dos tomas de presión colocadas antes y después de la placa, captan la presión diferencial producida por la placa de orificio. La disposición de las tomas de presión puede verse en la figura 349 (a), (b) y (c). Los tipos de tomas de presión comúnmente más utilizados son: • Tomas sobre la brida: es el tipo más comúnmente utilizado, figura 349 (a). En este caso las tomas están taladradas sobre las bridas que soportan la placa y están situadas a una distancia de 1 pulgada de la misma. Este tipo de tomas no se recomienda para diámetros de tubería menores de dos pulgadas (2”), debido a que la vena contracta puede estar a menos de 1 pulgada de la placa de orificio. 259 MANTENIMIENTO INDUSTRIAL • Tomas en la vena contracta: localizados a una distancia de 1 D (D = diámetro nominal de la tubería) aguas arriba de la placa, y 1/2 D aguas abajo de la placa, o sea sobre la vena contracta, figura 349 (b). Sin embargo, el punto de la vena contracta varía con la relación de diámetros d/D, produciéndose errores en la medición si se cambia el diámetro del orificio. • Tomas en la tubería: están localizadas a una distancia de 2 1/2 D aguas arriba y 8 D aguas abajo de la placa, figura 349 (c). Miden la pérdida de presión permanente a través de un orificio. Este tipo de tomas requiere mayor cantidad de tramos rectos de tuberías. El orificio de la placa puede ser de tres tipos, figura 348: concéntrico, excéntrico y segmental. Las placas de orificio de tipo excéntrico y segmental se utilizan principalmente en aplicaciones de fluidos que contienen materiales en suspensión o condensado de vapor. Las placas de orificio de tipo concéntrico se recomiendan para aplicaciones de líquidos limpios, de baja viscosidad; para la mayoría de los gases; y vapor a baja velocidad. Con el fin de obtener una buena medida del caudal, la construcción y el empleo de placas de orificio deben responder a las siguientes condiciones esenciales: 260 MANTENIMIENTO INDUSTRIAL - La arista exterior del orificio debe ser viva y neta. No son tolerables defectos mecánicos tales como rebabas, ranuras o salientes. - El espesor de la placa de orificio debe estar de acuerdo con las prescripciones de la norma ISO 5167, no debiendo sobrepasar: ≡ 1/30 del diámetro interior de la tubería (D) ≡ 1/8 del diámetro del orificio (d) ≡ 1/4 del valor (D - d) / 2 Estas son las condiciones mínimas. Cuando el espesor real del diafragma deba sobrepasar este mínimo, la arista posterior puede ser achaflanada con un ángulo de 45 grados por lo menos, a partir de la cara de la placa o bien fresada al espesor adecuado. Debe instalarse el diafragma siempre de forma que la arista viva quede aguas arriba, no pudiendo ser utilizado para la medida de caudales que fluyan en sentido inverso. - La placa del diafragma (o placa de orificio), se fija entre bridas y debe ser completamente plana, con una tolerancia de 0,01 mm. - La relación de diámetros del orificio y la tubería d/D, habitualmente denominada relación de apertura ß, debe estar comprendida, para una medida correcta, entre 0,2 y 0,7. En tuberías grandes (de 4" en adelante), la ß podría estar comprendida entre 0,1 y 0,75 aunque no es recomendable llegar a estos extremos. Los valores óptimos de ß están entre 0,4 y 0,6. Para una misma velocidad de flujo una alta relación beta produce menor caída de presión que una baja relación. Además, con este tipo de diafragma no se debe medir en tuberías de diámetro inferior a 1½" (40 mm), ya que la rugosidad de las paredes interiores puede modificar significativamente los coeficientes característicos. La práctica normal en el diseño de una placa de orificio es la de suponer un diferencial de presión (Hw) estándar (Ejemplo: 100 pulgadas de columna de agua), y 261 MANTENIMIENTO INDUSTRIAL luego calcular el diámetro del orificio para la máxima tasa de flujo. Todas las placas del orificio pueden ser diseñadas para que produzcan un Hw estándar. Esto permite que el mismo transmisor o elemento secundario pueda ser utilizado con todas las placas de la planta. A pesar de ser simple, la placa de orificio es un elemento de precisión. La exactitud depende de la uniformidad y del espesor de la placa, y del maquinado del orificio. La calidad de la instalación también afecta la exactitud. Las conexiones, válvulas y otros elementos distorsionantes del flujo pueden cambiar el perfil de velocidad creando remolinos que afectan la medición, las longitudes rectas de tubería aguas arriba y aguas abajo de la placa, se establecen como normas para garantizar la calidad de la medición. Las longitudes de los tramos rectos de tubería antes y después de la placa dependen del tipo de instalación. Figura 351.- Ensambladura placa de orificio b. Tubo Venturi El tubo Venturi clásico está caracterizado por su entrada convergente y salida divergente, tal como se muestra en la figura 352. La presión interna se mide en su sección de entrada, la cual tiene el mismo diámetro que la tubería. Luego sigue una sección de transición, en la cual el diámetro interno se reduce hasta el diámetro de la sección de la garganta. La presión estática se mide en la sección de la garganta, la cual se dimensiona para producir un diferencial de presión deseado a una determinada tasa de flujo. En la sección de salida del tubo Venturi, el diámetro de la garganta incrementa gradualmente hasta hacerse igual al diámetro de la tubería. El tubo Venturi se utiliza para medir flujo de líquidos y gases, 262 MANTENIMIENTO INDUSTRIAL cuando se quiere minimizar la pérdida de presión. Su medidor puede manejar entre un 25 y 50% mayor flujo que una placa de orificio, para diámetros de tubería y pérdidas de presión comparables. No tiene partes móviles y no existe la posibilidad de que se puedan acumular partículas en la garganta; esto trae como consecuencia un bajo mantenimiento, lo que lo hace atractivo para manejar flujos viscosos o lodos. El coeficiente de descarga para el tubo Venturi clásico oscila entre 0,984 y 0,985. La relación de diámetro recomendable es 0,4 < β < 0,75. Para fluidos compresibles se tiene la siguiente limitación: 𝐷𝑖𝑓𝑒𝑟𝑒𝑛𝑐𝑖𝑎𝑙 𝑑𝑒 𝑝𝑟𝑒𝑠𝑖ó𝑛 ≤ 0,25 𝑝𝑟𝑒𝑠𝑖ó𝑛 𝑎𝑔𝑢𝑎𝑠 𝑎𝑟𝑟𝑖𝑏𝑎 El tubo Venturi puede fabricarse en materiales diversos según las necesidades de la aplicación a que se destine. El más comúnmente empleado es el acero al carbono, aunque también se utiliza el latón, bronce, acero inoxidable, cemento, y revestimientos de elastómeros para paliar los efectos de la corrosión. El Venturi ofrece ciertas ventajas con respecto a otros captadores, como son: 1. Pérdida de carga permanente poco elevada, menor que la del diafragma y la de la tobera, gracias a los conos de entrada y salida. 2. Posibilidad de medir caudales superiores a un 60% a los obtenidos por el diafragma para la misma presión diferencial e igual diámetro de tubería. 3. En general, el Venturi requiere un tramo recto de entrada más corto que otros elementos primarios. 4. Facilidad para la medida de líquidos con sólidos en suspensión. 263 MANTENIMIENTO INDUSTRIAL Generalmente los tubos Venturi se utilizan en conducciones de gran diámetro (de 12" en adelante), donde las placas de orificio producirían pérdidas de carga muy importantes y no conseguirían una buena medida. También se utilizan en conductores de aire o humos con conductos no cilíndricos, en grandes tuberías de cemento, para conducción de agua, etc. Existen modificaciones del diseño del tubo Venturi clásico, la selección del modelo correcto se debe realizar con el auxilio de las Normas previamente mencionadas. Según la naturaleza de los fluidos de medida, se requieren modificaciones en la construcción del tubo Venturi: eliminación de los anillos de ecualización; inclusión de registros de limpieza, instalación de purgas, etc. En el corte transversal se aprecian los anillos circulares que rodean el tubo Venturi en los puntos de medida. Esos anillos huecos conectan el interior del tubo mediante orificios en número de cuatro o más, espaciados uniformemente por la periferia. El fluido, al circular, pasa por estos orificios y por el anillo donde se encuentran los racores que conectan con el transmisor. FIGURA 353 • Venturi de Inserción El Venturi de inserción es una versión del elemento primario recién descrito, utilizada en aplicaciones de alta presión. Se mantiene en su lugar entre las bridas mediante una brida suplementaria que hace cuerpo con la tubería y permite eliminar la costosa construcción en materiales especiales que exigiría el Venturi estándar para este tipo de servicio. La perdida de carga permanente es más elevada que la del Venturi estándar, pero inferior a la de la placa orificio. 264 MANTENIMIENTO INDUSTRIAL • Tubos de baja pérdida Los tubos de baja pérdida que se muestran en las figuras se denominan «Venturi corto» y constituyen la más reciente variación de este tipo de elementos primarios. Al igual que el Venturi clásico, pueden utilizarse para medir caudales de líquidos con partículas en suspensión. Fig. 354.- Tubo de baja pérdida (venturi corto) completo, con bridas, realizado en fundición La característica más notable del Venturi corto es la de producir la menor pérdida de carga de todos los captadores de este tipo. Es así mismo de volumen más reducido, y de hecho, más fácil de instalar. Fig. 355.- Tubo de baja pérdida, tipo inserción, realizado en material plástico Los tubos de baja presión son de construcción bridada, pudiendo fabricarse tanto en fundición como mediante mecanización. Pueden así mismo montarse insertándose en el interior de la tubería. En el caso de construcción bridada, la toma de alta presión se encuentra situada en la propia brida. Los tipos de inserción tienen sus dos tomas en el anillo de fijación. 265 MANTENIMIENTO INDUSTRIAL • Uniformización del flujo Los elementos primarios tratados hasta aquí requieren tramos rectos de tuberías antes y después del elemento deprimógeno, con objeto de que el flujo sea uniforme al llegar al punto donde se produce la pérdida de presión y no se vea afectado por accesorios de la tubería tales como: codos, válvulas, etc. Los tramos rectos de tubería se expresan normalmente en función del diámetro de la misma, oscilando agua arriba entre 10D para ß de 0,2 y un codo simple «T» y 62D para dos codos o más de 90° en planos diferentes y ß de 0,7. Si se trata de válvulas puede oscilar entre 18D y 32D para los valores de ß citados. Cuando, dada la configuración de la tubería, no sea posible conseguir los tramos rectos citados, puede recurrirse a introducir en la misma aleta de guía varios tubos juntos, con objeto de uniformar el flujo. 266 MANTENIMIENTO INDUSTRIAL c. Tobera La tobera pude considerarse como una variación del tubo Venturi. La abertura de la tobera es una restricción elíptica tal como se muestra en la figura 357. Las tomas de presión se localizan aproximadamente ½ D aguas abajo y 1 D aguas arriba; donde D es el diámetro de la tubería. La tobera se utiliza principalmente cuando la turbulencia es alta (Re > 50.000), tal como flujo de vapor a altas temperaturas. La caída de presión que se produce en la tobera es mayor que en un tubo Venturi pero menor que en una placa de orificio. d. Tubo Pitot Los tubos Pitot son una de las formas de medir caudal más antigua. Los tubos Pitot son instrumentos sencillos, económicos y disponibles en un amplio margen de tamaños. Si se utilizan adecuadamente pueden conseguirse presiones moderadas, y aunque su principal aplicación sea para medir la velocidad del aire, se usan también para medir el caudal en grandes conductos y con cualquier gas. La principal desventaja de esta técnica es cuando existen bajas velocidades de fluido. También se puede utilizar para medir líquidos aunque se corre el peligro de rotura de la sonda. Un tubo Pitot mide dos presiones simultáneamente: presión de impacto (Pt) y presión estática (Ps). La unidad para medir la presión de impacto es un tubo con el extremo doblado en ángulo recto hacia la dirección del flujo. El extremo del tubo que mide presión estática es cerrado pero tiene una pequeña ranura en un lado. Los tubos se 267 MANTENIMIENTO INDUSTRIAL pueden montar separados o en una sola unidad. En la figura 358 se muestra un esquema de un tubo Pitot. La presión diferencial medida a través del tubo Pitot puede calcularse utilizando la ecuación de Bernoulli, y resulta ser proporcional al cuadrado de la velocidad del fluido: 𝑃𝑡 − 𝑃𝑠 = 𝑉= 𝜌𝑉 2 2 2 𝑃𝑡 − 𝑃𝑠 𝜌 en la que Pt = presión de impacto o total absoluta en el punto donde el líquido anula su velocidad; Ps = presión estática absoluta en el fluido; ρ = densidad; V = velocidad del fluido en el eje del impacto. Para determinar el lugar de inserción de los tubos, es necesario localizar el punto de máxima velocidad, desplazando el orificio de los mismos a lo largo del diámetro de la tubería. A pesar de que un tubo de Pitot puede calibrase para medir caudal en ± 0,5%, la distribución inestable de velocidades puede desencadenar errores importantes. Esto constituye uno de los motivos por lo que estos elementos se utilizan sobre todo para la 268 MANTENIMIENTO INDUSTRIAL medida de caudal de gases, ya que la variación de velocidad de la mediana con respecto al centro no constituye un inconveniente grave. Las aplicaciones de los tubos de Pitot están muy limitadas en la industria, dada la facilidad con que se obstruyen por la presencia de cuerpos extraños en el fluido a medir. En general, se utilizan en tuberías de gran diámetro, con fluidos limpios, principalmente gases y vapores. Su precisión depende de la distribución de las velocidades y generan presiones diferenciales muy bajas, que resultan difíciles de medir. e. Annubar El Annubar se compone prácticamente de cuatro tubos de Pitot y evita los errores producidos como consecuencia de realizar la medición en un solo punto. Las pérdidas de energía, así como las pérdidas de carga, resultan muy pequeñas. Fig. 359.- Tubo Annubar El Annubar se compone de cuatro partes esenciales: 1. La sonda de alta presión con cuatro orificios encarados al flujo. Basado en los cálculos de Chebychef, relativos a las medidas de circulación del fluido, cada orificio capta una presión generada por la velocidad del flujo en cada uno de los cuatro segmentos iguales. 2. El tubo de interpelación colocado en la sonda de alta presión transmite la media de las presiones detectadas por los cuatro orificios a la cámara de alta presión del transmisor electrónico de presión diferencial. Esta media es la suma de presiones debidas a la velocidad y a la presión estática. 269 MANTENIMIENTO INDUSTRIAL 3. El orificio posterior capta la baja presión. La diferencia entre la alta presión del tubo de interpelación y la baja presión del orificio es proporcional, según la teoría de Bernouilli, al cuadrado del caudal. En ciertos tipos de Annubar el orificio posterior está situado en la sonda de alta presión, mientras que en otros esta presión se capta mediante un tubo situado detrás de la sonda. 4. La cabeza de conexión transmite la presión diferencial al transmisor electrónico. El Annubar substituye con ventaja al Pitot, por su fácil instalación y la posibilidad de montarlo en tuberías existentes sin gran obra. f. Medidor de impacto Target El último desarrollo de interés en medidores diferenciales es el medidor de impacto (figura 361). Puede ser visto como una placa de orificio instalada al revés. En realidad, el elemento primario es un disco sólido circular montado perpendicularmente al flujo y suspendido al nivel del eje de la tubería por una barra de fuerza controlada por 270 MANTENIMIENTO INDUSTRIAL un sistema electrónico o neumático. Este sistema mide la fuerza de impacto Fi sobre el disco, la cual se expresa por la ecuación 𝑉2 𝐹𝑖 = 𝐶𝑑 𝜌 𝐴 2 Donde: Cd : Coeficiente de arrastre (drag), determinado experimentalmente en laboratorio. ρ : Densidad del fluido. V : Velocidad promedio del fluido. A : Área del disco. De acuerdo al teorema de Bernuolli, esta fuerza Fi, es proporcional a la diferencia entre la presión total y la presión estática, de tal manera que el caudal Qv, puede obtenerse una vez más por la relación de raíz cuadrada. Este tipo de medidor es apropiado para flujos “sucios” y de bajo número de Reynolds, donde el elemento primario clásico no es adecuado; también pueden usarse para líquidos limpios y gas natural. Una vez efectuada su calibración y adecuada instalación, el medidor de impacto provee buena exactitud, pero sus mejores características son su rangoabilidad y rápida respuesta dinámica. 271 MANTENIMIENTO INDUSTRIAL Medidores de flujo de desplazamiento positivo Los medidores de desplazamiento positivo son dispositivos que separan la corriente de flujo en segmentos volumétricos individuales. Un volumen conocido de fluido se aísla mecánicamente en el elemento del medidor, y es pasado desde la entrada de este hasta su salida, llenando y vaciando alternadamente los compartimientos o cámara del medidor, (figura 362). Las partes mecánicas del medidor se mueven aprovechando la energía del fluido. El volumen total de fluido que pasa a través del medidor en un período de tiempo dado, es el producto del volumen de la muestra por el número de muestras. Los medidores de flujo de desplazamiento positivo frecuentemente totalizan directamente el flujo en un contador integral, pero también pueden generar una salida de pulso que puede ser leída localmente o transmitida a una sala de control. También se suelen conocer con el nombre de contadores por que cuentan el volumen de líquido independientemente del tiempo transcurrido. En cada medidor se pueden destacar tres componentes: - Cámara. - Desplazador. - Mecanismo que cuenta en número de veces que el desplazador se mueve. Un punto importante a tener en cuenta en este tipo de instrumentos, es el conseguir una buena estanqueidad de las partes móviles, evitando un par de rozamiento inaceptable y que la cantidad de líquido de escape a través del medidor sea moderada. Por esto es necesario calibrar el medidor para varios caudales, dentro del margen de utilización y con un fluido de viscosidad conocida. 272 MANTENIMIENTO INDUSTRIAL Al presentar resistencia a la fricción, para bajos caudales su funcionamiento no es correcto, siendo su margen idóneo de funcionamiento entre el 20 y el 65%. Los medidores de desplazamiento positivo se adaptan excelentemente a aplicaciones de procesos discontinuos y a aquellos que requieren una totalización del volumen que pasa a través del medidor. Las principales ventajas de estos tipos de instrumentos son: - Buena exactitud y amplio rango de medida. - Buena repetitibilidad. - Buen comportamiento para fluidos muy viscosos, y para aquellos fluidos con condiciones cambiantes. - Medida directa de caudal volumétrico. Los principales inconvenientes son: - Alto costo para grandes tamaños (> 6"). - Alta pérdida de carga (limitación de caudal). - Mal funcionamiento para fluidos sucios (posibles bloqueos de las partes móviles). - Pueden dañarse por sobrevelocidad. En la instalación de un medidor de desplazamiento positivo se recomienda instalar un retenedor o filtro, aguas arriba, para evitar que partículas extrañas entren en la cámara del medidor. También se recomienda un mecanismo para eliminar las burbujas de aire presentes en el líquido, ya que el medidor registrará el volumen de aire con el líquido. Los medidores de flujo de desplazamiento positivo son sensibles a los cambios de viscosidad. Para viscosidades por debajo de 100 centistokes el medidor debería ser calibrado para el fluido específico. Por encima de este valor, cambios en la viscosidad no afectan el funcionamiento. Los medidores de desplazamiento positivo pueden clasificarse, de acuerdo al movimiento del elemento de medición, en: • Disco oscilante • Pistón oscilante • Pistón reciprocante • Tipo rotación La mayoría de estos medidores se utilizan en aplicaciones para líquidos, sin embargo, existen algunas versiones disponibles para gases. La configuración interna de estos medidores puede tomar diferentes formas. 273 MANTENIMIENTO INDUSTRIAL • El medidor de disco oscilante utiliza una cámara de medición cilíndrica dentro de la cual se produce el movimiento oscilante (o tipo bamboleo) del disco al pasar el flujo, permitiendo la rotación del eje. El movimiento del eje es transmitido a un magneto el cual se usa para mover una magneto externa al medidor. Esta rotación puede utilizarse para conducir el mecanismo de un registrador o un transmisor. El par disponible es pequeño, lo que pone un límite en la utilización de accesorios mecánicos. La operación de este tipo de medidor se muestra en la figura 362. Como este medidor atrapa o encierra una cantidad fija de flujo cada vez que el eje rota, entonces el caudal es proporcional a la velocidad de rotación del mismo. Empleado originalmente en aplicaciones domésticas para agua, se utiliza industrialmente en la medición de caudales de agua fría, agua caliente, aceite y líquidos alimenticios. La precisión es de ± 1-2 %. El caudal máximo es de 600 l/min y se fabrica para pequeños tamaños de tubería. • El Medidor de Pistón Oscilante, consiste en una cámara cilíndrica con una salida y una placa divisoria que separa esta salida en dos. La única parte móvil es un pistón cilíndrico que oscila suavemente en un movimiento circular entre las dos caras planas de la cámara, y que está provisto de una ranura que desliza en la placa divisora fija que hace de guía del movimiento oscilante. El eje del pistón al girar, transmite su movimiento a un tren de engranajes y a un contador. El par disponible es elevado de modo que el instrumento puede accionar los accesorios mecánicos que sean necesarios. Los diagramas adjuntos (fig.363) indican el movimiento del pistón desde que entra el líquido en la cámara hasta que ha sido medido y descargado. Figura 363 274 MANTENIMIENTO INDUSTRIAL La precisión normal es de ± 1 % pudiéndose llegar a ± 0,2 % con pistón metálico y ± 0,5 % con pistón sintético, dentro de un margen de caudal de 5 : 1. Se fabrican para tamaños de tubería hasta 2" con caudales máximos de 600 l/mino. Se aplican en la medición de caudales de agua y de líquidos viscosos o corrosivos. • El medidor de Pistón Alternativo es uno de los primeros elementos de medición de caudal por desplazamiento positivo. Al igual que los anteriores se describe mediante un esquema a continuación: El instrumento se fabrica en muchas formas: de varios pistones, pistones de doble acción, válvulas rotativas, válvulas deslizantes horizontales. Estos instrumentos se han empleado mucho en la industria petroquímica y pueden alcanzar una precisión del orden de ± 0,2 %. Su capacidad es pequeña comparada con los tamaños de otros medidores. Su costo inicial es alto, dan una pérdida de carga alta y son difíciles de reparar. • Los Medidores Rotativos son de muchos tipos, y son los más usados en la actualidad, dentro de la categoría de desplazamiento positivo. Su funcionamiento es muy sencillo y su mantenimiento bajo. Este tipo de instrumento tiene válvulas rotativas que giran excéntricamente rozando con las paredes de una cámara circular y transportan el líquido en forma incremental de la entrada a la salida. Se emplean mucho en la industria petroquímica 275 MANTENIMIENTO INDUSTRIAL para la medida de crudos y de gasolina con intervalos de medida que van de unos pocos l/min de líquidos limpios de baja viscosidad hasta 64.000 l/min de crudos viscosos. La configuración interna de estos medidores puede tomar diferentes formas, siendo los más empleados, los cicloidales, los de dos rotores (bir-rotor) y los ovales. a. Medidores cicloidales Los cicloidales (fig. 365) contienen dos lóbulos del tipo Root engranados entre sí que giran en direcciones opuestas manteniendo una posición relativa fija y desplazando un volumen fijo de fluido líquido o gas en cada revolución. Figura 365.- Medidor cicloidal Se fabrican en tamaños que van de 2 a 24" y con caudales de líquidos de 30 a 66.500 l/min y en gas hasta 3 Nm3/h. Su precisión es de ± 1 % para caudales de 10 al 100 % del intervalo de medida, bajando mucho la precisión en caudales bajos debido a los huelgos que existen entre los lóbulos. b. Medidor Bi-Rotor El medidor bi-rotor en un medidor tipo desplazamiento positivo diseñado para medir el flujo total de productos líquidos que pasa a través del mismo por medio de una unidad de medición que separa el flujo en segmentos separándolo momentáneamente del caudal que pasa a través del medidor. Los segmentos son contados y los resultados son transferidos al contador o cualquier otro sistema totalizador a través del tren de engranajes. 276 MANTENIMIENTO INDUSTRIAL Consiste en dos rotores sin contacto mecánico entre sí que giran como únicos elementos móviles en la cámara de medida. La relación de giro mutuo se mantiene gracias a un conjunto de engranajes helicoidales totalmente cerrado y sin contacto con el líquido. Los rotores están equilibrados estática y dinámicamente y se apoyan en rodamientos de bolas de acero inoxidable. Al no existir contacto mecánico entre los rotores, la vida útil es larga y el mantenimiento es fácil. El instrumento puede trabajar con bajas presiones diferenciales del orden de 1" c. de a. Los medidores son fabricados con cuerpo de acero en casco unitario o doble teniendo la unidad de medición removible como una unidad separada del cuerpo. Son diseñados para que los efectos adversos de líneas fuera de alineación no puedan ser transmitidos a la unidad de medición. Una ventaja adicional de la fabricación de doble casco es que la presión de operación, cualquiera que sea, es constante dentro y alrededor de la unidad de medición. Por lo tanto no hay cambio en la precisión de una presión de operación a otra. Figura 366 Son reversibles, admiten sobrevelocidades esporádicas sin recibir daño alguno, no requieren filtros, admiten el paso de partículas extrañas y permiten desmontar fácilmente la unidad de medida sin necesidad de desmontar el conjunto completo. Su ajuste es sencillo y son de fácil calibración mientras el instrumento está bajo presión y sin pérdida de líquido. Se aplican en la medición de caudales de crudos y productos petrolíferos. Su tamaño varía de 3 a 12". La precisión es de ± 0,2 %, con una pérdida de carga de 5 psi y con un margen de caudal de 5 a 1. 277 MANTENIMIENTO INDUSTRIAL c. Medidores Ovales El medidor de engranaje tipo óvalo encuentra su mayor aplicación en el manejo de fluidos viscosos, donde a menudo se hace difícil la aplicación de otros medidores debido a limitaciones del número de Reynolds. Su diseño tolera en menor grado el manejo de líquidos con sólidos en suspensión; sin embargo, ello podría ocasionar daños en los dientes de los engranajes afectando su precisión. El diferencial de presión a través del medidor de flujo, origina las fuerzas que actúan sobre el par de engranajes y los hace rotar (figura 367). La precisión es de ± 0,5 % del caudal total. Los tamaños varían de ½ a 3". Cómo funciona el medidor tipo oval El medidor oval mide en forma precisa el flujo de líquido utilizando el diferencial de presión para hacer rotar un par de engranajes sellan el flujo de salida, desarrollando el diferencial de presión. En la figura 367-1, el engranaje B está balanceado hidráulicamente desbalanceado. Por lo que el engranaje A impulsa el engranaje B hasta que el engranaje A vuelva a estar balanceado hidráulicamente (figura 367-3). Esta acción de impulso alterada provee una rotación suave a un casi constante torque sin puntos muertos. Al rotar los engranajes atrapan cantidades precisas de líquido en los espacios vacíos de la cámara de medición de medición, y la tasa de flujo es proporcional a la velocidad rotacional de los engranajes. Ya que él deslice entre los engranajes ovales y la pared de la cámara es mínimo, el medidor no es afectado por cambios en la viscosidad y lubricación de los líquidos medidos. Un eje de salida, que rota en proporción directa a los engranajes ovales por medio de un acople magnético potente, impulsa un tren de engranajes que proveen el registro del medidor en unidades de galones, litros, libras. Los accesorios más frecuentemente usados y disponibles para este tipo de medidores son: - Convertidor Frecuencia-Tensión. - Convertidor Frecuencia-Corriente (microprocesadores). - Totalizador Electromecánico/Reset Manual. - Totalizador Electromecánico/Parada Automática. 278 MANTENIMIENTO INDUSTRIAL Medidores de flujo de área variable Los medidores de caudal por área variable utilizan el mismo principio de medida que los medidores por presión diferencial, es decir, la relación entre la energía cinética y la energía debida a la presión. Mientras que la placa de orificio mantiene una restricción constante al flujo, y la caída de presión resultante aumenta al aumentar el flujo, el rotámetro varía el área de la restricción para mantener una caída de presión constante. En estos instrumentos el área de la restricción cambia al mismo tiempo que el caudal, permaneciendo constante la presión diferencial. El instrumento de área variable por excelencia es el rotámetro, el cuál consta básicamente de un tubo vertical troncocónico, de cristal o con armadura metálica, en cuyo interior se encuentra un flotador. El fluido entra por la parte inferior del tubo, arrastrando el flotador en dirección ascendente. Al ascender el flotador va dejando libre un área en forma anular hasta que la fuerza producida por la presión diferencial en las caras superior e inferior del flotador se equilibra. Es por lo tanto un sistema basado en equilibrio de fuerzas. La posición de equilibrio alcanzada por el flotador dentro del tubo es una indicación directa del caudal de paso, marcado sobre el propio tubo o armadura. Esta técnica de medición se utiliza para bajos caudales y fluidos limpios. Las precisiones para este tipo de instrumentos vienen a ser del +/- 2%, por lo que no son aconsejables cuando se requieren altas precisiones, tiene alguna limitación en cuanto a instalación (montaje vertical), y habitualmente son utilizados para medidas locales. Por otra parte, son instrumentos baratos, simples, aptos para caudales pequeños y la lectura de caudal es lineal. 279 MANTENIMIENTO INDUSTRIAL Los rotámetros se encuentran disponibles en una amplia variedad de estilos. Los materiales del tubo, la forma y materiales del flotador, el tipo de conexiones, las longitudes de escala, la presión y la temperatura a las que puede operar, varían para cubrir un amplio rango de condiciones de servicio. La capacidad de un rotámetro se calcula en base al flujo de aire equivalente para servicios de gas o vapor; y en base al flujo de agua equivalente para servicios de líquido. Los fabricantes proporcionan las tablas de capacidad para varios diámetros de tubos y para diferentes tipos de flotador, basados en flujos de agua y aire a condiciones estándar. El flujo actual del fluido a ser medido con el rotámetro, debe convertirse a gpm de agua equivalente o a scfm de aire equivalente para poder utilizar las tablas de capacidad dadas por el fabricante, y así seleccionar el tamaño correcto del rotámetro. Para hacer esta conversión deben utilizarse las siguientes ecuaciones: 𝑔𝑝𝑚 𝐻2 𝑂 = 𝑔𝑝𝑚 𝐹𝑙𝑢𝑖𝑑𝑜 𝑆𝑐𝑓𝑚 𝐴𝑖𝑟𝑒 = 𝑆𝑐𝑓𝑚 𝐹𝑙𝑢𝑖𝑑𝑜 7,02 𝜌 𝜌𝐹 − 𝜌 𝑃𝑎𝑟𝑎 𝑙í𝑞𝑢𝑖𝑑𝑜𝑠 8,02 𝑆𝐺 14,7 𝑇𝑜𝑝 𝜌𝐹 𝑃𝑜𝑝 530 𝑃𝑎𝑟𝑎 𝑔𝑎𝑠 Donde: SG : Gravedad específica del gas a condiciones estándar Top : Temperatura absoluta a condiciones de operación, °R Pop : Presión absoluta a condiciones de operación, psia ρ : Densidad del fluido a condiciones de operación, gr./cm3 ρF : Densidad del flotador requerido Según la aplicación, los rotámetros pueden dividirse en rotámetros de purga, de indicación directa para usos generales y armados con indicación magnética y transmisión neumática y electrónica (fig. 369). Los rotámetros de purga se utilizan para caudales muy pequeños. Algunas de sus aplicaciones típicas son la purga hidráulica de los sellos mecánicos de las bombas generales de la planta, la medición del nivel por burbujeo (véase el apartado de nivel), la purga de elementos de presión diferencial para la medida de caudal evitando la obturación de las tuberías y la purga de instrumentos que trabajan en atmósferas corrosivas o polvorientas. 280 MANTENIMIENTO INDUSTRIAL Figura 369.- Tipos de rotámetros 281 MANTENIMIENTO INDUSTRIAL Los rotámetros de vidrio de indicación directa pueden adoptar varias disposiciones: llevar placas laterales, estar cerrados con cuatro placas con ventana de cristal para ver el tubo; disponer de armadura de seguridad o blindada de cierre estanco para evitar que en caso de rotura del tubo el gas o el líquido interiores puedan dañar al operador; disponer de armadura anti-hielo con gel de sílice para evitar la presencia de humedad en el espacio entre la armadura y el tubo que podría impedir la visibilidad del flotador. Los rotámetros armados incorporan un tubo metálico que no permite la lectura directa del caudal, por lo cual precisan pues de indicación o de transmisión. Los rotámetros se emplean asimismo conectados a las tomas de una placaorificio o diafragma, es decir, como rotámetros by-pass. (fig. 369 f). En esta aplicación, en lugar de medirse la presión diferencial se mide el caudal del fluido que circula de la toma de alta presión, a la baja, debido a la presión diferencial creada por la placa. El rotámetro determina un caudal proporcional linealmente al caudal principal de paso por la tubería gracias a un segundo orificio calibrado situado en la tubería de by-pass. Este orificio está calibrado de tal forma que el flotador marca el 100 % de la escala cuando el caudal que pasa a través de la placa-orificio en la tubería principal llega al 100 % con la presión diferencial máxima de cálculo. Como el rotámetro en by-pass mide caudal y no presión diferencial (utilizándose sólo la presión diferencial creada por la placa-orificio en la tubería principal como una bomba hidráulica que crea un caudal derivado del principal) la escala de medida es lineal y no de raíz cuadrada como sería de suponer siendo el elemento de medida un diafragma. Los transmisores neumáticos acoplados al rotámetro consisten en una leva que sigue magnéticamente el movimiento del flotador y que se encuentra situada entre dos toberas neumáticas. Estas toberas forman parte de un transmisor de equilibrio de movimientos (fig. 369 d). Los transductores eléctricos acoplados a rotámetros pueden ser de varios tipos: - Potenciométrico. - Puente de impedancias El transductor potenciométrico, como puede verse en la figura 370, consiste en una varilla que sigue magnéticamente el movimiento del flotador dentro del tubo y que mueve el brazo de un potenciómetro. Por las características del circuito potenciométrico da una tensión alta de salida proporcional a la posición del flotador. El sistema presenta la desventaja del envejecimiento y desgaste característicos del potenciómetro. 282 MANTENIMIENTO INDUSTRIAL Figura 370 El transductor de puente de impedancias (fig. 371) consiste en un mecanismo de indicación actuado magnéticamente, un transformador diferencial de núcleo móvil y un convertidor. Al variar el caudal, un imán montado en el flotador o en la varilla de extensión del mismo hace girar un mecanismo magnético de posición formado por una hélice de hierro dispuesta en un cilindro de aluminio. Una leva de forma característica gira con el conjunto y se introduce dentro del arrollamiento activo de un transformador diferencial. El primario de este transformador está alimentado por una tensión alterna constante procedente de un oscilador preamplificador. Figura 371.- Transductor de puente de impedancias 283 MANTENIMIENTO INDUSTRIAL La señal de salida del secundario del transformador, que es proporcional al caudal, pasa a un convertidor donde es transformada en una señal de corriente continua constante. En el convertidor se encuentran los ajustes de cero y de multiplicación del instrumento. El intervalo de medida de los rotámetros es usualmente de 1 a 10 (relación entre el caudal mínimo y el máximo) con una escala lineal. Su precisión es del orden de 2 % de toda la escala cuando están sin calibrar y de 1 % con calibración. Los rotámetros son adecuados para la medida de pequeños caudales llegando a límites mínimos de 0,1 cm3/minuto en agua y de 1 cm3/minuto en aire. El valor máximo que pueden alcanzar es de 3,5 m3/minuto en agua y de 30 m3/minuto en aire. Pueden utilizarse en la medida de mayores caudales montándose como rotámetros by-pass en la tubería. Medidores de flujo volumétricos Un medidor de velocidad, utilizado para medir flujo volumétrico, puede definirse como un medidor en el cual la señal del elemento primario es proporcional a la velocidad del fluido. Utilizando la ecuación: 𝑄 = 𝐴𝑉 Donde: Q : Tasa de flujo. V : Velocidad del fluido. A : Área transversal de la tubería. Puede observarse que la señal generada es lineal con respecto al flujo volumétrico. Los medidores de tipo volumétricos son menos sensibles a las variaciones en el perfil de velocidad del fluido, cuando se les compara con los medidores de flujo de tipo diferencial. Debido a que existe una relación lineal con respecto al flujo, no existe una relación de raíz cuadrada como en el caso de los medidores diferenciales; lo cual explica su mayor relación de flujo máximo a flujo mínimo. Los medidores de flujo de tipo volumétrico descritos a continuación tienen una amplia aplicación en la industria petrolera. • Medidores tipo turbina: Un medidor tipo turbina está constituido por un rotor con aspas o hélices instalado dentro de un tramo recto de tubería, axialmente en la dirección del flujo, tal como se muestra en la figura 372. El rotor generalmente está soportado por cojinetes para reducir la fricción mecánica y alargar la vida de las partes móviles. A medida que el fluido pasa a través del tubo, el rotor gira a una velocidad proporcional a la velocidad del fluido. En la mayoría de los medidores, un dispositivo 284 MANTENIMIENTO INDUSTRIAL de bobina magnética, colocado fuera de la tubería, detecta la rotación de las aspas del rotor. A medida que cada aspa del rotor pasa por la bobina, se genera un pulso de voltaje en la bobina. El número total de pulsos es proporcional a la cantidad total de fluido que pasa a través del rotor, mientras que la frecuencia de los pulsos es proporcional a la tasa de flujo. También se utilizan detectores de radio frecuencia para señalar el movimiento de las aspas. En este caso, una señal de alta frecuencia es aplicada sobre la bobina. A medida que las aspas rotan, la señal de alta frecuencia es modulada, amplificada y retransmitida. Un detector de alta frecuencia tiene la ventaja de que no obstaculiza el rotor como lo hace el detector magnético. La fibra óptica también ha sido utilizada para detectar la rotación de las aspas. Este sistema opera por medio de la luz reflectada de las aspas del rotor. Figura 373 285 MANTENIMIENTO INDUSTRIAL El medidor tipo turbina es adecuado para medir flujos de líquidos, gases y vapores y es especialmente útil en sistemas de mezclas en la industria del petróleo. Es uno de los medidores más exactos para servicio de líquidos. Los tamaños van hasta 24 pulgadas y el rango puede ir desde 0,001 hasta 40.000 gpm en líquidos; y hasta 10.000.000 scfm de gases. Cada medidor se calibra para determinar el coeficiente de flujo o factor K, que representa el número de pulsos generados por unidad de volumen del fluido. Su exactitud, por lo tanto, es la exactitud del tren de pulsos y oscila entre +0,15% y +1% de la lectura. El factor K se representa por la ecuación: 𝐾= 60 𝑓 𝑄 Donde: f : Número de pulsos por segundo Q : Tasa de flujo en gpm. K : Pulsos por galón En la selección de un medidor tipo turbina se debe tener en cuenta el tipo de fluido ya que los agentes corrosivos, sucio, sólidos y la acción erosiva del fluido puede dañar el mecanismo del medidor. Así, estos medidores son limitados a fluidos limpios haciéndose obligatorio el uso de coladores y de una instalación apropiada. Figura 374 286 MANTENIMIENTO INDUSTRIAL • Medidor de Flujo de Tipo Electromagnético: El medidor de flujo magnético, figura 375, representa uno de los medidores de flujo más flexibles y aplicables. Proporciona una medición sin obstruir el flujo, es prácticamente insensible a las propiedades del fluido, y es capaz de medir los fluidos más erosivos. Se instala igual que un segmento convencional de tubería, y la caída de presión que produce no es mayor que la producida por un tramo recto de tubería de longitud equivalente. Los medidores de flujo magnéticos son por lo tanto muy adecuados para medir químicos, lodos, sólidos en suspensión y otros fluidos extremadamente difíciles de medir. Su principio de medición proporciona una medición de flujo con una señal inherentemente lineal al flujo volumétrico independientemente de la temperatura, presión, densidad, viscosidad o dirección del fluido. La única limitación que tienen es que el fluido debe ser eléctricamente conductor y no magnético. El principio de operación de un medidor de flujo magnético está basado en la Ley de Faraday que establece que cuando un conductor se mueve a través de un campo magnético, se produce un voltaje inducido, cuya magnitud es directamente proporcional a la velocidad del conductor, a la longitud del mismo y al campo magnético. Cuando las bobinas electromagnéticas que rodean al tubo se energizan, generan un campo magnético dentro de él. El fluido del proceso que pasa a través del campo magnético funciona como un conductor en movimiento induciendo un voltaje en el fluido. Los electrodos colocados en el interior de la tubería establecen una conexión eléctrica con el fluido del proceso, captando el voltaje que ésta presenta. V es la velocidad de un fluido conductor en una tubería no-conductora, el cual fluye a través de un área de campo magnético B, y con electrodos espaciados una distancia D. La velocidad del fluido conductor, los electrodos 287 MANTENIMIENTO INDUSTRIAL y el campo magnético se encuentran formando ángulos rectos uno al otro. Bajo estas condiciones la Ley de Faraday puede escribirse como: 𝐸=𝐾𝐵𝐷𝑉 Donde: E : Fuerza electromotriz (Fem.) resultante, voltios K : Constante de proporcionalidad D : Distancia entre electrodos V : Velocidad del fluido La velocidad lineal se reemplaza por el flujo volumétrico (Q) para hacerla más útil en aplicaciones de medición de flujo. Q = A. V, donde A es el área transversal de la tubería. Sustituyendo en la ecuación anterior resulta: 𝐸= 𝐾𝐵𝐷𝑄 𝐴 Esta ecuación demuestra la relación lineal que existe entre el voltaje inducido y el flujo. La limitación que tienen los medidores de flujo magnético es que el fluido debe ser conductor y no-magnético. La unidad para medir conductividad es el micro siemens por centímetro μS/cm. Los requerimientos mínimos de conductividad pueden diferir de un fabricante a otro pero 2 μS/cm. es aproximadamente el valor mínimo de conductividad. Por debajo del límite mínimo de conductividad, la resistencia del electrodo puede producir un error en la señal del flujo. Las principales ventajas de estos tipos de instrumentos son: − Buen comportamiento con fluidos sucios, viscosos, pasta de papel, etc. − Poca pérdida de carga. − Buen comportamiento con tuberías grandes. − Buen comportamiento ante cambios de densidad, viscosidad, etc. − Suelen ser bidireccionales. − Salida Lineal. Los principales inconvenientes son: − El fluido debe tener una conductividad eléctrica razonable (no válido para gases y líquidos orgánicos). − Puede llegar a calentarse el instrumento por el efecto de las bobinas. − Se pueden ver afectados por el ruido. La precisión típica es del +/- 0,5%. 288 MANTENIMIENTO INDUSTRIAL • Medidor de flujo de tipo ultrasónico: Los medidores de flujo de tipo ultrasónico utilizan ondas de sonido para determinar el flujo de un fluido. Un transductor piezoeléctrico genera pulsos de ondas, los cuales viajan a la velocidad del sonido, a través del fluido en movimiento, proporcionando una indicación de la velocidad del fluido. Este principio se utiliza en dos métodos diferentes; existiendo por lo tanto dos tipos de medidores de flujo de tipo ultrasónico. a. Medidor ultrasónico de flujo que mide el tiempo de viaje de la onda ultrasónica: este tipo de medidor ultrasónico utiliza el método de medición del tiempo de viaje de la onda de sonido. El medidor opera de la siguiente manera: se colocan dos transductores en posición opuesta, de modo que las ondas de sonido que viajan entre ellos forman un ángulo de 45° con la dirección del flujo en la tubería, figura 376. La velocidad del sonido desde el transductor colocado aguas arriba (A) hasta el transductor colocado aguas abajo (B) representa la velocidad inherente del sonido en el líquido, más una contribución debido a la velocidad del fluido. De una manera similar, la velocidad medida en la dirección opuesta B a A representa la velocidad inherente del sonido en el líquido, menos la contribución debido a la velocidad del fluido. La diferencia entre estos dos valores se determina electrónicamente y representa la velocidad del fluido, la cual es directamente proporcional al flujo del mismo fluido. El flujo se determina a partir del tiempo medido, expresado por la ecuación: 𝑡= 𝐿 𝐶𝑜 + 𝑉 cos ∅ 289 MANTENIMIENTO INDUSTRIAL Donde: t : Tiempo de viaje de la onda de sonido Co : Velocidad del sonido en el fluido (en agua Co = 1.481 m/s a 20°C) Ø : Ángulo entre la dirección del flujo y la dirección de la onda de sonido L : Distancia entre el transmisor y el receptor Despejando la velocidad, se obtiene: 𝑉= 1 𝐿 − 𝐶𝑜 𝑐𝑜𝑠∅ 𝑡 Como la velocidad del sonido en el fluido puede variar con la temperatura y la densidad del fluido, normalmente se emplean dos series de pulsos de frecuencia conocida. La serie aguas arriba se resta de la serie aguas abajo. La diferencia de frecuencias medidas (Df) es una función directa de la velocidad del fluido, y es independiente de la velocidad del sonido. Los transductores pueden estar incorporados en un tramo recto de tubería, o pueden colocarse exteriormente sobre la tubería existente. Este tipo de medidor se utiliza principalmente en fluidos limpios ya que es recomendable que el fluido esté libre de partículas que pueden producir la dispersión de las ondas de sonido. La exactitud de estos medidores está entre +1% y +5% del flujo. Burbujas de aire o turbulencia en la corriente del fluido, causada por conexiones o accesorios aguas arriba, pueden dispersar las ondas de sonido provocando inexactitud en la medición. b.- Medidor ultrasónico tipo Doppler. Este tipo de medidor también utiliza dos transductores. En este caso están montados en un mismo compartimiento sobre un lado de la tubería tal como se muestra en la figura 377. Una onda ultrasónica de frecuencia constante se transmite al fluido por medio de uno de los elementos. Partículas sólidas o burbujas presentes en el fluido reflectan la onda de sonido hacia el elemento receptor. El principio Doppler establece que se produce un cambio en la frecuencia o longitud de onda cuando existe un movimiento relativo entre el transmisor y el receptor. En el medidor Doppler el movimiento relativo de las partículas en suspensión que posee el fluido, tienden a comprimir el sonido en una longitud de onda más corta (mayor frecuencia). Esta nueva frecuencia se mide en el elemento receptor y se compara electrónicamente con la frecuencia emitida. El cambio de frecuencia es directamente proporcional a la velocidad del flujo en la tubería. Estos medidores normalmente no se utilizan en fluidos limpios, ya que se requiere que una mínima cantidad de partículas o burbujas de gas estén presentes en la corriente del fluido. El medidor Doppler Clásico requiere un máximo de 25 ppm de 290 MANTENIMIENTO INDUSTRIAL sólidos suspendidos en la corriente del fluido, o burbujas de por lo menos 30 micrones. La exactitud de estos medidores generalmente es de +2% a +5% del valor medido. Debido a que las ondas ultrasónicas pierden energía cuando se transmiten a través de la pared de la tubería, estos medidores no deben ser utilizados con materiales tales como concretos que impiden que la onda atraviese la pared de la tubería. • Medidor de flujo tipo torbellino (Vortex): Básicamente este tipo de medidor está constituido por un objeto en forma de barra que se coloca dentro de la tubería para obstruir el flujo, figura 378, lo que hace que se produzcan torbellinos o remolinos aguas abajo de la obstrucción. La zona de remolinos es donde el fluido se mueve a mayor velocidad si se compara con el resto de la corriente del fluido que la rodea. Debido a esto, se trata de 291 MANTENIMIENTO INDUSTRIAL una zona de baja presión. Los remolinos generados aguas abajo del objeto que produce la obstrucción, crean una zona de baja presión en la corriente del fluido. La frecuencia de estos remolinos (vórtices), es directamente proporcional a la velocidad del fluido. Cerca del cuerpo que produce la obstrucción, se colocan sensores sensibles a las fluctuaciones de presión que miden esta frecuencia; la cual es independiente de las propiedades del fluido; teniendo como única limitación un valor mínimo del número de Reynolds. La tasa de flujo se determina a partir de esta medición. Diferentes tipos de sensores han sido utilizados para detectar la frecuencia de los remolinos, entre éstos se incluyen: transductores piezoeléctricos, transductores magnéticos, transductores sónicos y fibra óptica. Un diseño mejorado utiliza sensores de tipo capacitivo, los cuales son inmunes a las vibraciones y son compatibles con la mayoría de los fluidos. Los medidores de flujo de tipo torbellino pueden ser utilizados para medir flujo de líquidos, gases o vapores, requieren tramos rectos de tubería similares a los requeridos por una placa de orificio con una relación β igual a 0,70. Bajo condiciones similares producen una caída de presión que es aproximadamente igual a 0,56 ó 0,66 veces a la producida por una placa de orificio. El comportamiento oscilatorio descrito arriba puede comprenderse a través del concepto de la relación complementaria entre un avión impulsado por motores jet y su estela. Estos resultados experimentales y un análisis dimensional confirman la linealidad de la relación entre la frecuencia y el flujo volumétrico dentro del rango del número de Reynolds, donde el número de Strouhal (S) puede ser considerado constante, las ecuaciones siguientes demuestran la relación entre la frecuencia de oscilación f, la velocidad del fluido y el número de Strouhal. = 0,283 𝑙 𝑆= 𝑉= 𝑆= 𝑓 𝑉 𝑄 𝜋𝐷2 4 𝑓 𝜋𝑓 𝐷2 = 4𝑄 4𝑄 𝜋𝐷2 𝑓 4𝑆 0,185 𝑉 = ; 𝑓= 2 𝑄 𝜋𝐷 292 MANTENIMIENTO INDUSTRIAL • Vertederos. En la medición del caudal en canales abiertos, se utilizan vertederos de formas variadas que provocan una diferencia de alturas del líquido en el canal entre la zona anterior del vertedero y su punto más bajo. El vertedero debe formar un ángulo recto con la dirección del caudal y el canal aguas arriba debe ser recto como mínimo en una distancia de 10 veces la anchura. La diferencia de alturas debe medirse en un punto aguas arriba lo suficientemente alejado como para no ser influido por la curva de bajada de la superficie del agua y es conveniente incluso utilizar un pozo de protección (tubería de Ø ligeramente mayor que el flotador) para el flotador del instrumento de medida, caso de utilizar este sistema. El caudal es proporcional a la diferencia de alturas según la fórmula general empírica: 𝑄 = 𝐾 𝑙 𝐻𝑛 Q= caudal en m3/s; K = constante que depende del tipo de vertedero; 1= anchura de la garganta del vertedero en m; H= diferencia máxima de alturas en m; n = exponente que depende del tipo de vertedero o canal. Los vertederos más empleados son de los siguientes tipos: - Rectangular con contracción lateral, simple y fácil de construir y el más económico. Es apto para la medida de caudales de 0-60 m3/h a 0-2000 m3/h. La fórmula de medida de caudales que suele usarse es la de Francis: 3 𝑄 = 1,84 𝑙 − 0,2 𝐻 𝐻2 𝑚3 𝑠 siendo l 1a anchura del rectángulo en m. El valor de 0,2 H viene sustituido por 0,1 H si no hay contracción del manto vertido, es decir, si 1= anchura del canal. - Triangular o en V, que consiste en una placa con un corte en V de vértice dirigido hacia abajo y con cada lado igualmente inclinado respecto a la vertical. A igualdad de tamaño, su campo de medida es más amplio que el de los otros vertederos. Es capaz de medir caudales dentro del intervalo 0-30 m3/h a 0-2300 m3/h. La fórmula empírica aplicable es: 𝑄 = 1,33 𝐻2,475 𝑚3 𝑠 𝑝𝑎𝑟𝑎 𝑢𝑛 𝑣𝑒𝑟𝑡𝑒𝑑𝑒𝑟𝑜 𝑒𝑛 𝑉 𝑑𝑒 90° 293 MANTENIMIENTO INDUSTRIAL - Cipolleti o trapezoidal con la ranura en forma de trapecio invertido. La pendiente de los lados del trapecio corrige las contracciones laterales del manto de agua y el caudal es por lo tanto proporcional a la altura de la cresta. Su campo de medida equivale al del vertedero rectangular. La fórmula empírica es: 3 𝑄 = 1,86 𝑙 𝐻 2 𝑚3 𝑠 - El vertedero Parshall o Venturi se emplea normalmente en aquellas aplicaciones en las que un vertedero normal no es siempre adecuado tal como ocurre cuando el líquido transporta sólidos o sedimentos en cantidad excesiva, o bien cuando no existe altura de presión suficiente, o bien cuando no es posible construir un tramo recto de longitud suficiente (un mínimo de 10 veces la anchura del canal). Puede utilizarse para caudales superiores a 0-30 m3/h. El vertedero Parshall es de forma parecida al tubo Venturi. Consiste en paredes verticales y con el suelo inclinado en la estrangulación. La descarga del fluido puede presentarse de dos formas: caudal libre cuando la elevación del agua después de la estrangulación es lo suficientemente baja como para impedir que el agua que se descarga retorne hacia atrás y no siga suavemente el perfil del elemento Parshall; caudal sumergido cuando el agua está a demasiada altura después de la estrangulación y vuelve hacia atrás. La condición de caudal libre se tiene cuando la relación de las alturas de cresta en la parte plana y en la parte final del elemento referidas al nivel plano Hu/Hd es menor de 0,6 para un elemento de garganta hasta 230 mm y menor de 0,7 para anchuras de garganta mayores de 300 mm. Relaciones mayores dan lugar a caudales del tipo sumergido en el cual el caudal es una función de Hu y Hd , mientras que en la condición de caudal libre el flujo es únicamente función de Hu. Se suele mantener generalmente esta condición. La ecuación general empírica del vertedero Parshall es: 𝑄 = 𝐾 𝑙 𝐻𝑛 con los coeficientes siguientes: Constantes del vertedero Parshall 294 MANTENIMIENTO INDUSTRIAL A continuación se presenta el esquema de las distintas configuraciones de vertederos. 295 MANTENIMIENTO INDUSTRIAL Medidores de flujo másico La necesidad de tener medidores de flujo más precisos en procesos de transferencia de masa, ha incentivado el desarrollo de medidores de flujo de masa. Existen dos tipos principales de medidores de flujo que determinan directamente el flujo másico. Estos medidores son el Medidor Térmico y el Medidor Coriolis. A continuación se describe el principio de operación y sus características: a. Medidor térmico: Estos medidores generalmente son de dos tipos: unos que miden la velocidad de pérdida de calor de un cuerpo caliente debido al paso de una corriente de fluido a través de él; y otros que miden el incremento de temperatura de una corriente de fluido a medida que pasa sobre o a través de un cuerpo caliente. En ambos casos el flujo de masa se determina a partir de las propiedades físicas del fluido tales como conductividad y calor específico, los cuales, dentro de ciertos límites, son independientes de la temperatura y presión. Si las propiedades térmicas del fluido que están siendo medidas son constantes y se conocen, la diferencia entre dos lecturas de temperatura es proporcional al flujo másico. Si la absorción de calor en el lado de la pared de la tubería es despreciable, el balance de energía del fluido se expresa por la siguiente ecuación: 𝑄 = 𝑚𝑐𝑝 𝑇𝑎 − 𝑇𝑏 = 𝑅𝐼 2 Donde: Q : Potencia térmica. M : Flujo másico. cp : Calor específico a presión constante. Ta : Temperatura del fluido después del calentador. Tb : Temperatura del fluido antes del calentador. R : Resistencia del calentador. I : Corriente eléctrica. La figura 379 muestra los componentes de un sensor térmico utilizado para medir flujo másico. En este diseño se colocan dos detectores de temperatura (RTD de platino), exactamente iguales, un compensador y un elemento de calentamiento dentro de la cápsula del sensor. El elemento de calentamiento aumenta la temperatura en uno de los RTD produciéndose una diferencia de temperatura entre los RTD, la cual es mayor a cero flujo, y disminuye a medida que el fluido pasa a través del sensor enfriando la RTD calentada. Los cambios en el flujo afectan directamente la disipación de calor y consecuentemente, la diferencia de temperatura entre los dos RTD. Esta diferencia se convierte electrónicamente en una señal de salida linealizada, proporcionando una medición del flujo másico, exacta y repetitiva. El compensador instalado en el sensor 296 MANTENIMIENTO INDUSTRIAL asegura que los cambios en la temperatura del medio afecten de la misma forma al elemento de calentamiento, y a las dos RTD. Esto permite mantener la exactitud del medidor, aun en presencia de fluctuaciones en la temperatura del medio. Estos medidores deben ser calibrados para un fluido específico, debido a que el calor específico varía de acuerdo al tipo de fluido. Generalmente se utilizan para medir flujo de gas. Su exactitud es de aproximadamente +1% del flujo. b. Medidor de flujo tipo Coriolis: Un objeto que se mueve en un sistema de coordenadas que rota con una velocidad angular, experimentará una fuerza de Coriolis proporcional a la masa, a la velocidad del objeto y a la velocidad angular del sistema. Esta fuerza es perpendicular a la velocidad del objeto y a la velocidad angular del sistema de coordenadas. En la nueva generación de los medidores de Coriolis, comercialmente disponibles, el fluido a la entrada del medidor se divide entre dos tubos en forma de U, los cuales tienen un diámetro menor que el de la tubería del proceso. El flujo sigue la trayectoria curva de los tubos, y converge a la salida del medidor. Estos tubos se hacen vibrar a su frecuencia natural por medio de un mecanismo magnético. Si en vez de hacerlos rotar continuamente los tubos vibran, la magnitud y dirección de la velocidad angular es alternada. Esto crea una fuerza Coriolis alterna (figura 380). Si los tubos en forma de U son suficientemente elásticos, las fuerzas de Coriolis inducidas por la masa del fluido producen una pequeña deformación elástica. A partir de ella se mide y calcula el flujo de masa. 297 MANTENIMIENTO INDUSTRIAL Figura 380 La figura 381 muestra la configuración de un medidor tipo Coriolis; debido a que la masa no cambia, el medidor es lineal y no tiene que ser ajustado para variaciones en las propiedades del líquido. También elimina la necesidad de compensar por variaciones en la presión y temperatura. Este medidor es útil especialmente para líquidos cuya viscosidad varía con la velocidad. La exactitud típica de estos medidores está entre un +0,20% a +0,40% del valor máximo del flujo de diseño. Generalmente se emplean con fluidos líquidos, aunque también puede utilizarse con gases secos y vapor sobrecalentado. La limitación principal del uso de estos medidores está en su alto costo, el cual independientemente de sus bondades (gran precisión), puede hacer su adquisición no atractiva. 298 MANTENIMIENTO INDUSTRIAL 3.- Medición de nivel La medición del nivel puede definirse como la determinación de la posición de una interfase que existe entre dos medios separados por la gravedad, con respecto a una línea de referencia. Tal interfase puede existir entre un líquido y un gas, entre dos líquidos, entre un sólido granulado o sólido fluidizado y un gas, o entre un líquido y su vapor. Existen muchas situaciones en la industria petrolera donde estas interfases deben ser establecidas dentro de límites específicos, por razones de control del proceso o de la calidad del producto. Hay una gran variedad de técnicas por medio de las cuales se puede medir el nivel de líquidos o sólidos en equipos de procesos. La selección de la instrumentación adecuada depende de la naturaleza del proceso; del grado de exactitud y control requeridos y del aspecto económico. Es muy importante que el usuario conozca los diferentes medidores disponibles, para que así pueda hacer una selección apropiada. A continuación se describen los principales métodos e instrumentos utilizados en la medición de nivel. Tipos de instrumentos para medir nivel Al igual que otras variables de proceso, el nivel puede ser medido por métodos directos o métodos indirectos. Los métodos e instrumentos utilizados para medición de nivel pueden clasificarse de la siguiente manera: • Métodos visuales. • Instrumentos actuados por flotadores. • Desplazadores. • Instrumentos de nivel de tipo hidrostáticos. • Métodos electrónicos. • Métodos térmicos. • Métodos sónicos. • Instrumentos fotoeléctricos. • Instrumentos radioactivos. La referencia [Creus, Antonio. INSTRUMENTACIÓN INDUSTRIAL] plantea que los instrumentos de medición directa se dividen en: • Sonda • Nivel de cristal • Cinta y plomada • Instrumentos de flotador Mientras que los instrumentos que miden el nivel aprovechando la presión hidrostática se dividen en: • Medidor manométrico • Medidor de membrana • Medidor de tipo burbujeo • Medidor de presión diferencial de diafragma 299 MANTENIMIENTO INDUSTRIAL La citada referencia clasifica también a los instrumentos de medición de nivel según las características eléctricas del fluido en: • Medidor resistivo • Medidor conductivo • Medidor capacitivo • Medidor ultrasónico • Medidor de radiación • Medidor de láser En las tablas 67 y 68 se presentan cuadros comparativos que sirven como una guía para la selección de medidores de nivel. 300 MANTENIMIENTO INDUSTRIAL 301 MANTENIMIENTO INDUSTRIAL • Métodos visuales para medición de nivel Los métodos visuales para medición de nivel son las más antiguas y simples. No tienen partes móviles, por lo tanto no están sujetas a fallas mecánicas. Entre estos tipos de medidores se pueden mencionar: los tubos de vidrio y las cintas graduadas. a. Tubos de vidrio Los medidores o tubos de vidrio pueden ser considerados como manómetros en los cuales el nivel alcanza la misma posición que el nivel dentro del envase. La simplicidad de este instrumento lo hace popular en aquellas aplicaciones donde se requiere una indicación local del nivel. Existen dos tipos de medidores: el tubo transparente y el de reflexión. El transparente se utiliza en servicios donde el material dentro del recipiente tiene color o es viscoso, para detección de interfase o cuando el fluido es corrosivo. En la figura 382 se muestra un medidor de este tipo. El tubo tipo reflexión utiliza el fenómeno óptico de la refracción de la luz, que cambia la reflexión en el ángulo crítico de los rayos incidentes, figura 383. Cuando el tubo de reflexión está vacío, la luz incidente es reflejada desde las superficies prismáticas, haciendo que el vidrio tenga una apariencia plateada; a medida que el líquido sube en el vidrio, el ángulo crítico cambia debido a que el índice de refracción del líquido que sube, es diferente a la de los vapores encima de él. La luz visible es refractada en el fluido, haciendo que el vidrio se vea oscuro en la zona cubierta por el líquido. De esta manera, un tubo de reflexión que contiene líquido muestra una clara 302 MANTENIMIENTO INDUSTRIAL demarcación entre el área oscura del líquido y el área plateada del vapor encima del líquido. La figura 383 muestra un tubo de vidrio tipo reflexión. Estos medidores vienen en longitudes estándares. La máxima longitud está limitada a 1,8 m. (6 pies). Los tubos de vidrio tipo reflexión se utilizan principalmente para líquidos incoloros y no viscosos. b. Cintas graduadas Este método para medición de nivel consiste en una cinta graduada con una pesa que tiene una gravedad específica mayor que la del fluido que está siendo medido. La cinta se hace descender en el tanque que contiene el fluido y la superficie mojada de la cinta provee una indicación del nivel del líquido. Como la cinta esta calibrada en milímetros, pulgadas o pies, el sitio donde éste la marca será el nivel del recipiente. Su aplicación está limitada a tanques abiertos a la atmósfera. Como se puede notar es el método más seguro de medición de nivel, pero tiene una serie de desventajas, de las cuales podemos citar: a.- El recipiente debe estar a la presión atmosférica b.- El líquido debe dejar una línea nítida sobre la cinta c.- El líquido no debe emitir vapores dañinos para la salud. 303 MANTENIMIENTO INDUSTRIAL • Flotadores Los instrumentos de medición de nivel constituidos por flotadores, operan por el movimiento del flotador. El principio básico de flotación establece que “un cuerpo (flotador), sumergido en un líquido es empujado hacia arriba por una fuerza que es igual al peso del líquido desplazado”, la ecuación utilizada para determinar la fuerza de flotación disponible es: 𝐹𝑏 = 𝑉𝑓 𝑆𝑔 Donde: Fb : Fuerza de flotación. Vf : Volumen del flotador. Sg : Gravedad específica del líquido. El flotador se mueve hacia arriba y hacia abajo con los cambios en el nivel del líquido. Este movimiento del flotador puede ser transformado por diversos medios en una acción de indicación, registro o control. Generalmente son utilizados para medir interfases líquido-gas y líquido-líquido. Comercialmente existe una gran variedad de estos instrumentos utilizados en aplicaciones de nivel de líquido. Los más comunes son los flotadores horizontales y los flotadores verticales. El diseño mostrado en la figura 385 permite que el movimiento del flotador pueda ser usado para operar un interruptor (switch) neumático o eléctrico. 304 MANTENIMIENTO INDUSTRIAL Los ejemplos anteriores utilizan un mecanismo de multiplicación de la fuerza (palanca), de esta manera, un flotador pequeño puede ser utilizado en aplicaciones de baja gravedad específica. Cambiando o ajustando la longitud de la palanca, se regula el rango de medición. La figura 385 muestra un instrumento constituido por un flotador y una cinta que acciona un indicador y un contador. Un motor mantiene una tensión constante sobre la cinta. Este mecanismo puede ser equipado con interruptores por alto y bajo nivel para activar alarmas, reguladores (relés), válvulas, solenoides y otros equipos. Existen otros sistemas como el mostrado en la figura 385 en el cual se hace uso de fuerzas magnéticas para detectar la posición del flotador. Como se muestra en la figura 385 un flotador posiciona un pistón magnético conectado al brazo del flotador. Fuera de la cámara donde se mueve el flotador existe un imán permanente conectado a un brazo pivote montado con un interruptor. El movimiento del flotador hace que el pistón magnético pueda abrir y cerrar el interruptor, ya que este se mueve por la acción del pistón magnético sobre el imán. Este tipo de instrumento se utiliza en aplicaciones del nivel límite de líquidos, para producir señales de alarma, o control del tipo ON-OFF. Estos flotadores de movimiento vertical, prácticamente se mueven la misma distancia que se mueve el nivel del líquido. Debido a esto normalmente se emplean en aplicaciones de alarmas por alto o bajo nivel. El montaje de este tipo de sensor puede hacerse directamente sobre el recipiente o utilizando una jaula o cámara, en el cual se encuentra el flotador, y que puede ser conectada al recipiente por medio de bridas. La figura 386 muestra diferentes esquemas de conexión. 305 MANTENIMIENTO INDUSTRIAL Los interruptores de nivel activados por flotadores son los dispositivos electromecánicos más ampliamente utilizados en la detección de nivel de líquido. El mantenimiento de estos equipos es sencillo, son altamente confiables y utilizan una propiedad del líquido que generalmente es constante en la mayoría de las aplicaciones. Ventajas y desventajas: la aplicación de flotadores para medición y control de nivel del líquido presenta algunas ventajas y desventajas, mencionadas a continuación: ▫ Ventajas: - Fácil instalación. - Método de medición probado y confiable. - No requiere calibración. - Adecuado para aplicaciones en altas temperaturas, hasta 530 °C. - Adecuado para aplicaciones de altas presiones, hasta 5.000 psig. - Turbulencia y espuma en la superficie del líquido no afectan de manera significativa la medición. ▫ Desventajas: - El encostramiento o depósitos de materiales sobre el flotador pueden impedir la operación de algunos flotadores. - La exactitud normalmente está limitada a 1¼″. - No son adecuados para aplicaciones de líquidos viscosos. - Las partes móviles están sujetas a desgastes requiriendo mantenimiento frecuente. • Desplazadores La operación del desplazador está basado en el principio de Arquímedes, el cual establece que un cuerpo sumergido en un líquido será empujado hacia arriba por una fuerza igual al peso del líquido que él desplaza. Cuando aumenta el nivel del líquido en el recipiente, el desplazador pierde peso (este peso es igual al peso del líquido desplazado). Para relacionar la pérdida de peso del desplazador con el nivel del líquido en el recipiente, normalmente se utilizan dos tipos de mecanismos. Uno de ellos utiliza una barra de torsión sobre la cual está soportado el desplazador. La pérdida de peso del desplazador, por efecto del aumento del nivel en el recipiente, hace que varíe la fuerza ejercida sobre la barra de torsión, produciéndose en esta un movimiento de rotación proporcional al cambio, en el nivel de líquido. La conversión del movimiento de rotación en la barra de torsión, en una señal proporcional a la variación del nivel, puede hacerse neumática o electrónicamente. 306 MANTENIMIENTO INDUSTRIAL El otro mecanismo utiliza un resorte sobre el cual está soportado el desplazador. A medida que el desplazador pierde peso, la fuerza ejercida sobre el resorte disminuye haciendo que este se mueva. Tal movimiento se utiliza para producir una señal proporcional al nivel o para activar un interruptor. La fórmula utilizada para determinar el alcance (span) de la fuerza de flotación para aplicaciones de nivel de líquido es: 𝐹𝑏 = 𝑉 𝐿𝑊 𝐵 𝑆𝑔 𝐿 Donde: Fb : Alcance (Span) de la Fuerza de Flotación (Ibf o Newton) V : Volumen total del desplazador (pulg3 o cm3) Lw : Longitud de trabajo del desplazador (pulgadas o mm) L : Longitud total del desplazador (pulgadas o mm) B : Constante (0,036 Ibf/pulg. 09.8x10-3 N/cm3 ) Sg : Gravedad específica del fluido Los desplazadores se diferencian de los flotadores, debido a que en lugar de flotar sobre la superficie del líquido, están soportados por brazos que les permiten muy poco movimiento vertical a medida que el nivel cambia. Todas las mediciones de nivel que utilizan desplazadores son de interfase, ya que la variable medida es el nivel entre dos medios que tienen diferente gravedad 307 MANTENIMIENTO INDUSTRIAL específica. La magnitud del movimiento del desplazador depende del cambio de interfase y de la diferencia de gravedad específica entre el medio superior e inferior. En aplicaciones de nivel de líquido, la medición se realiza a medida que el líquido varía sobre la longitud total del desplazador. Las longitudes estándares de desplazadores van desde 0,3 hasta 3 metros (11,8 hasta 118 pulgadas). En aplicaciones de nivel de interfase, la medición se realiza a medida que el nivel de interfase entre dos líquidos inmiscibles de diferente gravedad específica, varía a lo largo de la longitud total del desplazador. Los desplazadores también pueden ser utilizados para medir densidad de líquidos; en este caso la medición se realiza con el desplazador completamente sumergido. Al igual que los flotadores, los desplazadores también se utilizan en aplicaciones de alarmas o control ON-OFF. En vez de un flotador que activa un interruptor en respuesta a un cambio en el nivel de líquido, los desplazadores se conectan a un resorte por medio de un cable de suspensión, tal como se muestra en la figura 389. El cambio en la fuerza ejercida sobre el resorte, debido a la pérdida de peso del desplazador, activa un interruptor; el cual a la vez activa una alarma o arranca o para una bomba. También existen configuraciones de interruptores dobles o triples con los cuales se pueden controlar más de una bomba o configurar más de un punto de alarma. Los sensores de nivel de tipo desplazador pueden ser instalados directamente sobre el recipiente, o en forma lateral utilizando una jaula o cámara dentro de la cual se coloca el desplazador. Esta jaula se conecta, por medio de bridas, al tanque en forma similar como el caso de los flotadores. Ventajas y desventajas: las ventajas y desventajas en la aplicación de desplazadores para medición de nivel son las siguientes: 308 MANTENIMIENTO INDUSTRIAL ▫ Ventajas: - Instalación sencilla. - Principio de operación confiable y probado. - Calibración ajustable en campo. - Permite medición continua. - Capacidad para trabajar a altas presiones y temperaturas (5.000 psig/540°C). - No lo afectan la turbulencia ni la espuma. ▫ Desventajas: - Es afectado por depósitos de materiales sobre el desplazador. - La exactitud normalmente está limitada a ±1/4″. - No es apropiado para líquidos viscosos. - Partes móviles sujetas a desgastes. - La medición es afectada por los cambios en la gravedad especifica del fluido. ▫ Aplicaciones: - Medición de nivel de líquidos de gravedad específica constante. - Medición de interfase líquido-líquido. - Control de bombas. - Interruptores para señal de alarma. La figura 390 se muestra algunas aplicaciones de los desplazadores. 309 MANTENIMIENTO INDUSTRIAL • Instrumentos de nivel de tipo hidrostático En los instrumentos de nivel de tipo hidrostático, el nivel se mide por medio del peso que ejerce una columna de líquido sobre el sensor de presión. La siguiente relación define la medición de presión debido a una columna de líquido, la cual puede ser convertida a altura del nivel sobre una línea de referencia determinada: 𝐻= 𝑃 𝑆𝑔 Donde: P : Presión debido a la columna de líquido. Sg : Gravedad específica del líquido. H : Altura del nivel. En este caso se supone que la densidad del líquido es constante, sin embargo, las variaciones en la temperatura pueden afectar considerablemente la densidad del líquido afectando la exactitud de la medición. El método más común para medir nivel con sensores de tipo hidrostático, es utilizando transmisores de diferencial de presión (D/P cell), o transmisores de presión manométrica (gage). En los de diferencial de presión, la presión ejercida por la columna de líquido actúa sobre una celda de diferencial de presión, cuyo movimiento es utilizado para transmitir una señal neumática o electrónica proporcional a la altura del nivel. En la figura 391 se muestran unas celdas de diferencial de presión. Éstos transmisores tienen precisiones que van de +0,2% a +0,25% del alcance (span). 310 MANTENIMIENTO INDUSTRIAL Se utilizan diferentes métodos para convertir la señal de presión hidrostática en una señal electrónica proporcional al nivel en el recipiente. En el ejemplo de la figura 392, se utiliza una celda de capacitancia que detecta los cambios en la presión hidrostática producidos por cambios en el nivel del recipiente. a. Aplicación de transmisores de nivel Los transmisores de presión manométrica o diferencial, utilizados para medir nivel de líquido, miden la presión hidrostática. Esta presión es igual a la altura del líquido sobre la conexión o toma multiplicada por la gravedad específica del líquido y es independiente del volumen o forma del recipiente. • Aplicación para Tanques Abiertos: En tanques abiertos, un transmisor de presión instalado cerca del fondo del tanque medirá la presión correspondiente a la altura del líquido sobre él. La conexión se hace en el lado de alta presión del transmisor. El lado de baja presión del transmisor se ventea a la atmósfera. Si el transmisor está por debajo del valor inferior del rango del nivel deseado; entonces debe hacerse una supresión de cero. • Aplicación para Tanques Cerrados: En tanques cerrados, la presión encima del líquido afecta la presión medida en el fondo. La presión en el fondo del tanque es igual a la altura del líquido multiplicada por su gravedad específica, más la presión en el tanque. Para medir el nivel real, la presión del tanque debe restársele a la medición. Esto se hace colocando una toma de presión en 311 MANTENIMIENTO INDUSTRIAL el tope del tanque y conectándola al lado de baja presión del transmisor. De este modo, la presión del tanque se aplica igualmente en los lados de alta y baja presión del transmisor. La presión diferencial resultante es proporcional a la altura del líquido multiplicada por la gravedad específica. Cuando el gas que está sobre el líquido en el recipiente, puede condensar a la temperatura y presión de operación, en la tubería de la toma de baja presión el transmisor se llenará lentamente de líquido, produciendo un error en la medición. Para eliminar este error potencial, la tubería se llena con un fluido de referencia. El fluido de referencia producirá una presión sobre el lado de baja presión del transmisor, haciendo necesario realizar una elevación de cero. b. Otros métodos hidrostáticos El Método de Burbujeo utiliza la variación de presión hidrostática causada por la columna de líquido. Dentro del recipiente cuyo nivel se quiere medir, se instala una tubería vertical. El extremo abierto de la tubería se hace coincidir con el punto de “nivel cero”, tal como se muestra en la figura 393. El otro extremo de la tubería se conecta a una fuente de aire regulada y a un medidor de presión. Cuando se va a realizar una medición de nivel, el aire de alimentación se ajusta de modo que la presión sea ligeramente superior que la presión ejercida por la columna de líquido. Esto se consigue regulando la presión del aire hasta que se observan burbujas saliendo del extremo de la tubería colocado dentro del recipiente. La presión indicada por el medidor está relacionada con el nivel a través de la ecuación ― 𝑯 = 𝑷 𝑺𝒈 ‖. El método de burbujeo es útil en aquellas aplicaciones donde los líquidos son corrosivos o tienen sólidos suspendidos. Provee indicación local, es fácil de instalar y económico. Debe ser utilizado en aplicaciones de líquidos de gravedad específica constante y donde no se requiera una gran exactitud. 312 MANTENIMIENTO INDUSTRIAL • Métodos electrónicos para medir nivel Las técnicas electrónicas para medición de nivel están basadas en los principios de capacitancia, conductividad y resistencia. Estos principios pueden ser aplicados para medir nivel de líquidos o sólidos. La selección del principio de medición depende del medio a ser medido, de las condiciones de operación, de la configuración del recipiente y del tipo de funcionamiento requerido (control, alarma, indicación). a. Sensores de nivel de tipo capacitivo La base de este método de medición radica en las características físicas de un condensador. La capacitancia de un condensador depende de la separación entre los electrodos o placas "d"; de su superficie "A" y de la constante dieléctrica del material entre las placas "E". 𝐶= 𝐴𝐸 𝑑 Un sensor de nivel tipo capacitivo sirve para medir el nivel de la mayoría de los líquidos y sólidos. El sensor está constituido por un electrodo o probeta de capacitancia que se introduce en el tanque. El cambio en la capacitancia, producido por un aumento o disminución del nivel en el recipiente, se mide utilizando la probeta de capacitancia, la cual está conectada a un circuito electrónico, que puede ser un interruptor de nivel para control ON-OFF, o un transmisor de nivel para medición de nivel continuo. Si el líquido es no conductor, el capacitor está formado por la probeta de capacitancia (electrodo primario) y la pared del tanque, los cuales conforman las placas del capacitor. El líquido cuyo nivel se quiere medir actúa como el dieléctrico. A medida que el líquido sube entre el espacio de las dos placas, se produce una variación en la capacitancia la cual se monitorea y se utiliza para dar una señal proporcional al nivel. En esta aplicación de líquidos no conductores la probeta de capacitancia debe estar aislada eléctricamente del tanque. Si el líquido es conductor, la probeta de capacitancia o electrodo primario se aísla eléctricamente del tanque y del líquido, generalmente se utiliza una cubierta de teflón sobre el electrodo. En este caso, el líquido actúa como la segunda placa del capacitor y el aislante sobre el electrodo primario actúa como el dieléctrico. Los problemas más comunes que se presentan con este tipo de medidores son: instalación incorrecta, encostramiento de la probeta, pérdida del aislante y falsa señal causada por espuma. 313 MANTENIMIENTO INDUSTRIAL La figura 394 muestra los componentes y algunas aplicaciones de los sensores de nivel capacitivo. Ventajas y desventajas: las ventajas y desventajas más importantes en la aplicación de sensores de nivel Capacitivos son: ▫ Ventajas: - Requieren mínimo mantenimiento. - Pueden ser utilizados para medición continua o puntual. - Valor deseado o Set Point ajustable. - Compatible con gran cantidad de líquidos, polvos, sólidos, lodos; materiales conductivos y no conductivos. - Resistente a la corrosión con la probeta adecuada. - Se ajustan a cualquier tipo de recipiente. ▫ Desventajas: - Cambios en la constante dieléctrica del material, causan errores en la señal. - Normalmente requieren calibración en campo. - Depósito de materiales altamente conductores sobre la probeta, pueden afectar la exactitud y la repetibilidad. 314 MANTENIMIENTO INDUSTRIAL b. Sensores de nivel de tipo conductivo Los sensores de nivel de tipo conductivo pueden ser utilizados para dar señales de alarma por alto y bajo nivel. Su aplicación está limitada a líquidos altamente conductores tales como materiales a base de agua. La figura 395 ilustra la aplicación de un sensor de nivel de tipo conductivo. El sistema consiste en instalar electrodos en el tanque en los puntos de detección de nivel, pero aislados eléctricamente del tanque y alimentados con una fuente de bajo voltaje. Cuando el líquido en el recipiente se pone en contacto con el electrodo, fluye una corriente de bajo voltaje entre éste y la pared del tanque. La resistencia eléctrica se mide utilizando un puente de Wheatstone. La resistencia es alta (> 1 M ohm) cuando el tanque está vacío, pero tan pronto como el líquido conductor toca la probeta, la resistencia disminuye. Este cambio en la resistencia se amplifica y se utiliza para operar un relé. Los sensores de nivel de tipo conductivo también pueden aplicarse para medir el nivel de interfase entre dos líquidos, uno de los cuales debe ser conductor. Ejemplo: Interfase aceite - agua. • Métodos térmicos para medir nivel Los sensores que utilizan este método están basados en la diferencia entre las características térmicas de los fluidos. Se utilizan como detectores de nivel límite de líquidos y sólidos. Generalmente consisten en un termistor calentado eléctricamente, instalado en el tanque. La temperatura del termistor y consecuentemente su resistencia eléctrica, incrementa a medida que la conductividad térmica del fluido, en el cual está sumergido, disminuye. Pueden ser utilizados para detectar interfases líquido-vapor, debido a que la conductividad térmica de los líquidos es mucho mayor que la de los vapores y están sujetos al encostramiento. 315 MANTENIMIENTO INDUSTRIAL • Sensores de nivel de tipo ultrasónico La figura 396 muestra el principio de operación de un sensor de nivel de tipo ultrasónico no intrusivo para aplicaciones de nivel continuo. En estos sensores, se mide el tiempo empleado por el sonido en su trayecto desde un emisor hasta un receptor. El instrumento tiene un emisor que proporciona breves impulsos sónicos. Estos impulsos son reflejados por la superficie del material en el recipiente y llegan de nuevo al emisor, que actúa ahora como receptor. El tiempo transcurrido es una medida de la distancia entre el material y el emisor-receptor. Un convertidor electrónico proporciona la medida del nivel. El instrumento puede incluir un sensor de temperatura para compensar los cambios en la temperatura del aire. Para aplicaciones de nivel puntual (control ON-OFF, alarma), se utilizan interruptores de tipo intrusivo, el principio de operación de estos interruptores es transmitir una onda ultrasónica desde un cristal piezoeléctrico a través de un espacio (gap), de aproximadamente ½″ hasta un cristal receptor. Cuando este espacio del sensor se llena con el líquido, la señal se transmite. Cuando el espacio está lleno de aire o de un vapor, la serial no se transmite. Cuando la señal transmitida se recibe, el circuito se completa y el amplificador entra en oscilación. Para aplicaciones de alto nivel se utiliza un sensor especial que oscila mientras está seco. Este sensor utiliza la misma técnica de dos cristales, pero la diferencia consiste en que cuando el líquido comienza a cubrir el sensor, la energía ultrasónica es absorbida por el líquido y la oscilación del sensor cesa. 316 MANTENIMIENTO INDUSTRIAL Ventajas y desventajas: algunas de las ventajas y desventajas en la aplicación de sensores ultrasónicos son los siguientes: ▫ Ventajas: - Disponibilidad de sensores no intrusivos para evitar problemas de corrosión y contaminación. - Medición continua y puntual. - No posee partes móviles. Menor mantenimiento. - Se utiliza para líquidos y sólidos, conductivos y no conductivos. ▫ Desventajas: - La medición puede ser afectada por el movimiento del material en el tanque. - La espuma del líquido puede absorber la señal transmitida. - La presencia de partículas o vapor en el aire puede interferir la señal de los sensores de tipo no intrusivo. • Sensores de nivel de tipo fotoeléctrico La detección del nivel está basada en el cambio de refracción que ocurre cuando el extremo cónico de un conductor lumínico de cuarzo es sumergido en el líquido. La luz infrarroja desde un diodo emisor de luz (L) pasa a través de un conductor de luz (Q) y es reflectado por su extremo cónico si está rodeado de aire, gas, o vapor. La luz reflectada es detectada por un fototransistor (P). Cuando el conductor de luz es sumergido en el líquido, la refracción en el extremo cambia y la luz es dispersada en el líquido. De esta forma, el fotorreceptor P, no recibe luz produciéndose un cambio en la resistencia del circuito, la cual es utilizada para dar una señal del nivel. Estos sensores son capaces de operar en casi todos los líquidos. La medición no es afectada por cambios en la viscosidad, densidad, conductividad o color. Se utilizan en tanques de almacenamiento a baja presión, tanques de buques con petróleo, químicos, gases licuados, tanques de combustible, etc. • Sensores de nivel de tipo radioactivo En este tipo de sensores, una fuente radioactiva emite un haz de rayos (gamma, alfa, etc.) que viaja a través del tanque y de su contenido, hasta un detector ubicado en el lado opuesto. En el detector existe un contador Geiger que produce un impulso eléctrico en respuesta a cada fotón que llega al detector. Estos pulsos son integrados y transformados en una señal de corriente directa proporcional a la radiación recibida en el contador. Si el nivel del material en el envase está por debajo del haz de rayos, la 317 MANTENIMIENTO INDUSTRIAL radiación recibida en el contador es mayor que cuando el material está en la trayectoria del rayo. Los sensores de nivel de tipo radioactivo pueden ser utilizados para medir niveles límites o nivel continuo. Pueden ser utilizados para detectar el nivel de casi cualquier líquido, sólido o material viscoso almacenado en un recipiente. Todos los elementos del sensor son externos al recipiente; de modo que la presión, el vacío, la temperatura, o materiales altamente viscosos, corrosivos, abrasivos o muy pesados; no afectan al sistema de medición. Figura 397.- Medidor de nivel radiactivo El material radioactivo del sensor está contenido en una doble cápsula de acero inoxidable soldada, de modo que en ningún caso hay peligro de que pueda escapar dicho material. Debido a que el material radioactivo irradia en todas las direcciones, se le coloca en el interior de un cabezal protector que permite la salida de radiación por un solo lado, precisamente sólo en la dirección donde está situado el detector. • Sensores de nivel de tipo microondas (radar) Un sensor de nivel de tipo microondas es un sensor no intrusivo. El sistema de medición está formado principalmente por un módulo electrónico de microondas, una antena, sensores adicionales (principalmente sensores de temperatura), y una unidad local o remota de indicación. El principio de operación está basado en el cambio de frecuencia de la señal de radar emitida hacia la superficie del líquido. La señal reflectada por la superficie del líquido en el recipiente tiene una frecuencia diferente a la de la señal transmitida. Esta diferencia de frecuencia es proporcional a la distancia que existe entre el transmisor y la superficie del líquido. 318 MANTENIMIENTO INDUSTRIAL La señal de microondas es emitida por una antena la cual direcciona la señal perpendicularmente hacia la superficie del líquido. Existen dos tipos principales de antena: la antena parabólica y la antena tipo corneta. Figura 398.- Componentes de un Sistema de Medición por Radar Figura 399.- Tipos de Antenas Algunas aplicaciones incluyen: medición de nivel de productos de hidrocarburos / petróleo, asfalto, químicos, gas natural licuado (GNL), también se puede medir el nivel de sólidos. Una aplicación muy común es la medición de nivel en tanques de techo fijo y tanques de techo flotante, en la industria petrolera y petroquímica. Figura 399.- Aplicaciones de Sensores de Nivel tipo Micro-Ondas en Tanques de Techo Fijo y Techo Flotante 319 MANTENIMIENTO INDUSTRIAL En la tabla 69, se presenta un resumen de los principales tipos de medidores de nivel y sus aplicaciones más apropiadas. 320 MANTENIMIENTO INDUSTRIAL 4.- Medición de temperatura La medida de temperatura constituye una de las mediciones más comunes y más importantes que se efectúan en los procesos industriales. Las limitaciones del sistema de medida quedan definidas en cada tipo de aplicación por la precisión, por la velocidad de captación de la temperatura, por la distancia entre el elemento de medida y el aparato receptor y por el tipo de instrumento indicador, registrador o controlador necesarios; es importante señalar que es esencial una comprensión clara de los distintos métodos de medida con sus ventajas y desventajas propias para lograr una selección óptima del sistema más adecuado. La Temperatura es difícil de definir, ya que no es una variable tan tangible como lo es la presión, dado que en su caso, no podemos referirla a otras variables. La temperatura es un estado relativo del ambiente, de un fluido o de un material referido a un valor patrón definido por el hombre, un valor comparativo de uno de los estados de la materia. Por otra parte, si, positivamente, podremos definir los efectos que los cambios de temperatura producen sobre la materia, tales como los aumentos o disminución de la velocidad de las moléculas de ella, con consecuencia palpable, tales como el aumento o disminución del volumen de esa porción de materia o posibles cambios de estado. Existen dos escalas de temperatura o dos formas de expresar el estado relativo de la materia, estas son: - Temperaturas absolutas - Temperaturas relativas Las escalas absolutas expresan la temperatura de tal forma que su valor cero, es equivalente al estado ideal de las moléculas de esa porción de materia en estado estático o con energía cinética nula. Las escalas relativas, son aquellas que se refieren a valores preestablecidos o patrones en base los cuales fue establecida una escala de uso común. En Sistema Métrico Decimal, las escalas relativas y absolutas son: - la Escala Celsius o de grados Centígrados (relativa) - la Escala Kelvin (absoluta) La equivalencia entre las dos escalas es: Grados Kelvin = Grados Centígrados + 273 321 MANTENIMIENTO INDUSTRIAL En el Sistema de Medidas Inglesas, su equivalente será: - La Escala Fahrenheit (Relativa) - La Escala Rankine (Absoluta) la equivalencia entre estas dos escalas es: Grados Rankine = Grados Fahrenheit + 460 Por otra parte, las escalas Celsius y la Fahrenheit están referidas al mismo patrón, pero sus escalas son diferentes. El patrón de referencia usado para su definición fueron los cambios de estado del agua. Estos puntos son: CAMBIO DE ESTADO SOLIDO - LÍQUIDO LIQUIDO - GAS ºCELSIUS 0 100 ºFARENHEIT 32 212 Como se puede deducir de la tabla anterior, por cada grado Celsius de cambio térmico tendremos 1,8 grados Fahrenheit de cambio equivalente. De todo esto, la equivalencia entre estas dos escalas será: Grados Fahrenheit = Grados Celsius * 1,8 + 32 Tipos de instrumentos para medir temperaturas El crédito de la invención del termómetro se atribuye a Galileo en el año 1592. Mejoras al diseño del termómetro de Galileo fueron introducidas por otros investigadores utilizando diversas escalas termométricas, todas ellas basadas en dos o más puntos fijos. No fue sino hasta el año 1700, cuando Gabriel Fahrenheit produjo termómetros repetitivos y exactos. Fahrenheit utilizó una mezcla de agua y sal. Esta fue la temperatura más baja que pudo reproducir, y la llamó “cero grados”. Para la temperatura más alta de su escala, utilizó la temperatura del cuerpo humano y la llamó 96 grados. Esta escala de Fahrenheit ganó popularidad principalmente por la calidad y repetibilidad de los termómetros construidos por él. Cerca de 1742 Anders Celsius propuso que el punto de fusión del hielo y el punto de ebullición del agua fuesen utilizados como puntos iniciales y finales de la escala de temperatura, de esta manera el cero grado fue seleccionado como punto de fusión del hielo y 100 grados como punto de ebullición del agua. Esta escala denominada Celsius, se le dio oficialmente el nombre en el año 1948. Otras escalas de temperatura llamadas Kelvin y Rankine, introducen el concepto del cero absoluto y se utilizan como estándares en la termometría. 322 MANTENIMIENTO INDUSTRIAL Existen diferentes sensores que se utilizan en la industria de procesos para medir la temperatura, entre los que se pueden mencionar: - Termómetro de bulbo (líquido, gas y vapor). - Termómetros bimetálicos. - Termopares. - Termómetros de resistencia. - Termistores. - Pirómetros de radiación. La selección y especificación apropiada de un instrumento de temperatura, depende mucho del conocimiento de los diferentes tipos de sensores disponibles, de sus limitaciones y de consideraciones prácticas. A continuación se describen los principales tipos de sensores utilizados en la industria para la medición de temperatura. En esta descripción se incluyen aspectos tales como: principio de funcionamiento, características y aplicaciones. a. Termómetros de bulbo Los Termómetros de Bulbo de uso industrial están diseñados para proveer una indicación o registro de la temperatura a distancia del punto de medición. El sistema generalmente está formado por un elemento sensitivo a la temperatura (Bulbo); un elemento sensitivo a los cambios de presión o volumen (Bourdon, Fuelle, Diafragma); un medio para conectar estos elementos (tubo capilar); y un mecanismo para indicar, registrar o transmitir la señal relacionada con la temperatura. La figura 400 muestra un termómetro de bulbo con un sistema para indicación local. Dependiendo del fluido que está dentro del bulbo, estos termómetros se clasifican de la siguiente manera: Sistema Clase I (bulbo lleno de líquido, excluyendo mercurio). Sistema Clase II (bulbo lleno de vapor). Sistema Clase III (bulbo lleno de gas). Sistema Clase V (bulbo lleno de mercurio). 323 MANTENIMIENTO INDUSTRIAL Observación: Actualmente no está permitido el uso de Sistema Clase V en la industria por ser el mercurio altamente contaminante. Los sistemas clase I y V operan bajo el principio de expansión volumétrica del líquido con la temperatura y dan una respuesta aproximadamente lineal frente a los cambios de temperatura. Entre los líquidos utilizados se encuentran mercurio, éter, xileno y alcohol. El rango de medición oscila entre -75 °C y 650 °C y depende del líquido utilizado. La figura 401 muestra un termómetro de bulbo clase I con un sistema de compensación, la cual se requiere cuando la longitud del capilar excede los 6 u ocho metros. Los sistemas de Clase II (bulbo lleno de vapor) operan bajo el principio del cambio en la presión de vapor de un líquido volátil con la temperatura; dando una relación no lineal entre la presión de vapor y la temperatura. El rango de medición oscila entre -254 °C y 315 °C y depende del fluido utilizado. Estos sistemas a su vez se clasifican en sistemas Clase IIA, IIB, IIC, IID dependiendo de la temperatura a la cual operan. Los sistemas Clase IIA están diseñados para operar con la temperatura medida mayor que la del resto del sistema térmico. Debido a que el vapor condensa en la parte más fría, el capilar y el tubo Bourdon deben ser llenados con el líquido, figura 402 (a). 324 MANTENIMIENTO INDUSTRIAL De esta forma el nivel de interfase permanece en el bulbo. Los sistemas Clase IIB están diseñados para operar con la temperatura medida menor que la del resto del sistema térmico. El vapor en este caso tiende a condensar en el bulbo; por lo tanto el capilar y el Bourdon no deben tener líquido. El Bulbo debe estar lleno hasta la mitad a temperatura ambiente, figura 402 (b). Los sistemas Clase IIC están diseñados para operar a una temperatura mayor o menor que la del resto del sistema térmico. Es una combinación de los sistemas IIA y IIB. La figura 403 (a) muestra un termómetro de este tipo. Los Sistemas Clase IID están diseñados para operar a una temperatura mayor, menor o igual a la del resto del sistema térmico. El líquido volátil es confinado en el bulbo por un líquido transmisor no volátil el cual llena el capilar y el Bourdon, figura 403 (b). Los sistemas Clase III (bulbo lleno de gas), operan bajo el principio del cambio en la presión del gas con la temperatura. Tienen una relación no lineal ya que puede aplicarse la Ley de los Gases Ideales para relacionar la temperatura con la presión. El rango de medición depende del gas utilizado y va desde 270 °C hasta 760 °C. En la figura 10.5 se muestran los diferentes componentes de un termómetro de gas. 325 MANTENIMIENTO INDUSTRIAL En la siguiente tabla se presentan las principales características de los termómetros de bulbo. b. Termómetros bimetálicos Todos los metales se dilatan cuando son calentados y la cantidad de dilatación depende de la temperatura y del coeficiente de dilatación de cada metal. Si dos láminas de metal con coeficientes de dilatación diferentes se funden la una a la otra, ocurre una distorsión al ser calentados ya que uno de los metales tratará de dilatarse más que el otro. Este es el principio de operación de los termómetros bimetálicos. Para uso industrial como indicador de temperatura, la cinta bimetálica generalmente se dobla en forma helicoidal, un extremo del cual es fijo, de modo que al calentarse se produce un movimiento de rotación, el cual se utiliza para mover una aguja de indicación sobre una escala. La figura 405 muestra los componentes de un termómetro bimetálico. Tanto la longitud del vástago como el diámetro de la caja mostrados en la figura 405 pueden ser seleccionados de acuerdo a las necesidades de la aplicación. Según la Norma SAMA las longitudes de los vástagos van desde 2 ½″ hasta 60″. Los rangos óptimos de medición van desde aproximadamente -50 °C hasta +425 °C. 326 MANTENIMIENTO INDUSTRIAL c. Termopares El termopar es uno de los sensores más comunes y simples usados para determinar la temperatura de los procesos. Básicamente, un termopar está constituido por dos metales diferentes tales como alambres de hierro y Constantan. En 1821 T. J. Seebeck descubrió que cuando se aplica calor a la unión de dos metales diferentes, se genera una fuerza electromotriz (Fem.), la cual puede ser medida en el otro extremo de estos dos metales (conductores). Este es el principio en el cual se basa la medición de temperatura utilizando termopares, figura 406. La “Junta de Medición” o “junta Caliente” es el extremo que se coloca en el medio cuya temperatura se quiere medir. La “junta de Referencia” o “junta Fría” es el extremo del termopar que se conecta a los terminales del instrumento de medición. Los conductores de un termopar forman un circuito eléctrico, por el cual fluye la corriente como resultado de la Fem. generada. Esta Fem. es proporcional a la diferencia de temperatura entre las dos juntas. La corriente fluirá en el circuito siempre y cuando T1 sea distinto de T2. c.1 Leyes termoeléctricas A continuación se describen varios fenómenos que se conocen como leyes de termopares, las cuales son útiles para comprender los circuitos de los termopares: • Ley de Metales Intermedios: la incorporación de un metal homogéneo al circuito de un termopar no cambia la Fem. desarrollada. 327 MANTENIMIENTO INDUSTRIAL • Ley de Temperaturas Interiores: cuando las juntas de dos metales homogéneos diferentes, se mantienen a diferentes temperaturas, no es afectada por los gradientes de temperatura a lo largo de los conductores. • Ley de Metales Interiores: en un circuito formado por dos metales homogéneos diferentes, que tienen las dos juntas a diferentes temperaturas, la Fem. desarrollada no es afectada cuando un tercer metal homogéneo se agrega al circuito, siempre y cuando las temperaturas de sus dos juntas sea la misma. c.2 Conversión de voltaje a temperatura La figura 408 muestra la relación entre el voltaje de salida versus temperatura para los termopares más comunes. Se puede observar que no se mantiene una relación lineal entre la temperatura y el voltaje. La conversión de este voltaje a temperatura se explica a continuación. El voltaje generado por un termopar no puede medirse directamente, ya que primero debe conectarse un voltímetro al termopar, y los cables del voltímetro crean 328 MANTENIMIENTO INDUSTRIAL ellos mismos un nuevo circuito termoeléctrico (termopar). Considere un voltímetro conectado a un termopar cobre-Constantan (Tipo T), como se muestra en la figura 409. Lo que se quiere es que el voltímetro indique solamente el voltaje V1, que es el voltaje de salida de la Junta J1; pero al conectar el voltímetro al termopar, se formaron dos juntas metálicas adicionales J2 Y J3. Debido a que J3 es una junta cobre-cobre, no se crea una Fem. en esta junta (\/3 = 0); pero J2 es una junta cobre-Constantan, la cual desarrolla una Fem. (V2) en oposición a V1. La lectura resultante en el voltímetro será la diferencia de temperaturas entre J1 y J2. Por lo tanto, la temperatura de J1 no puede conseguirse a menos que primero conozcamos la temperatura de J2. 329 MANTENIMIENTO INDUSTRIAL Un medio para determinar la temperatura de J es el de colocar la junta J2 en un baño de hielo como se muestra en la figura 410, haciendo que su temperatura sea 0°C y estableciendo J como la “Junta de Referencia”. Ahora, la lectura del voltímetro será: 𝑉 = 𝑉1 − 𝑉2 = 𝑇𝑗 1 − 𝑇𝑗 2 𝑇𝑗 1 °𝐾 = 𝑇𝑗 1 °𝐶 + 273,15 𝑉 = 𝑉1 − 𝑉2 = 𝑇𝑗 1 + 273,15 − 𝑇𝑗 2 + 273,15 𝑉 = 𝑇𝑗 1 − 𝑇𝑗 2 = 𝑇𝑗 − 0 𝑉 = 𝑇𝑗 1 Sumando el voltaje de la junta de referencia se ha referido la lectura V a 0°C. El punto de hielo o punto de referencia a 0 °C es utilizado por el National Bureau of Standards (NBS) como el punto de referencia fundamental para sus tablas de termopares. De este modo, se pueden utilizar las tablas NBS y convertir directamente el voltaje V a la temperatura Tj1. Casi en la totalidad de los casos la medición del voltaje generado por un termopar, se realiza a una temperatura Tref diferente a la de la temperatura de referencia de 0 °C. En este caso, al voltaje leído en el voltímetro habrá que sumarle el voltaje que generaría un termopar similar desde la Tref hasta la temperatura de referencia de 0 °C. De este modo se “traslada” la junta de referencia desde Tref hasta Tref = 0 °C, pudiéndose entonces utilizar las tablas NBS de termopares, las cuales como se dijo anteriormente están basadas en Tref = 0 °C 330 MANTENIMIENTO INDUSTRIAL No siempre es posible mantener la junta de referencia a la temperatura deseada; pero si la temperatura de la junta de referencia se mide o se conoce, entonces es posible aplicar correcciones a la Fem. obtenida. Para asegurar una lectura precisa, muchas termopares son instaladas con instrumentos que proveen compensación automática de la junta de referencia. En muchos instrumentos, esto se realiza haciendo pasar corriente a través de una resistencia sensible a la temperatura, la cual mide las variaciones en la temperatura de referencia y automáticamente provee la Fem. necesaria para la compensación. c.3 Tipos de termopares La tabla 71 muestra los tipos de termopares comúnmente más utilizados en la industria de procesos. El rango indicado en la tabla se refiere al rango recomendable. Es decir, el rango sobre el cual existe una relación aproximadamente lineal entre la temperatura y la Fem. generada. Los materiales constituyentes de cada tipo de termopar también se indican en la tabla 71. Los cables de los termopares han sido codificados con colores para evitar errores en las conexiones. La tabla 71 muestra la codificación de colores para cables de termopares recomendados por la Instrument Society of América (ISA) (ANSI C96-1 -1964). El cable negativo siempre es de color rojo. Otra forma de clasificar los termopares es según el tipo de junta. La junta de un termopar, figura 411 puede ser: - Expuesta (a) - Sin aterrar (b) - Aterrada (c) 331 MANTENIMIENTO INDUSTRIAL • Junta Expuesta: un termopar con junta expuesta es aquel en la cual la junta de medición está expuesta al medio cuya temperatura se quiere medir. Este tipo de junta es recomendable para medir temperaturas de gases no corrosivos, donde se requiere una respuesta rápida. La junta se extiende fuera de la protección metálica para dar una respuesta rápida. La protección metálica se sella en el punto donde se extiende la junta, para evitar la penetración de humedad o gas que puedan producir error. • Junta sin aterrar: un termopar con junta sin aterrar es aquel en la cual la junta de medición está aislada eléctricamente de la protección metálica. Esto es recomendable cuando se mide temperatura en áreas donde existe ruido eléctrico. El protector metálico debe estar aterrado eléctricamente. • Junta Aterrada: la junta aterrada combina las ventajas de un tiempo de respuesta excelente con la protección que le brinda un protector sellado. Este tipo de junta se recomienda para medición de temperaturas de gases y líquidos y para aplicaciones de alta presión. La junta de un termopar aterrada está soldada al protector metálico, permitiendo una respuesta más rápida que en el caso de la junta sin aterrar. c.4 Termopozos En la mayoría de las aplicaciones de medición de temperatura no es recomendable exponer el elemento sensor al fluido del proceso. La utilización de un termopozo, a pesar de que introduce retardos en la medición, es recomendable para proteger al elemento sensor de la corrosión, erosión y altas presiones además de permitir su remoción o cambio mientras la planta o el proceso está en operación. El termopozo puede tener varias configuraciones y formas para su montaje, tal como se muestra en la 332 MANTENIMIENTO INDUSTRIAL figura 413. El termopozo puede ser de forma recta, cónica o escalonada. La forma de conexión al proceso puede ser roscada o por medio de bridas. La longitud de inserción “U” de un termopozo, es la distancia desde el extremo libre del termopozo hasta, pero no incluyendo, la rosca externa u otro medio de conexión al recipiente o tubería, figura 413. La longitud de inmersión “R”, es la distancia desde el extremo libre del termopozo hasta el punto de inmersión en el medio cuya temperatura está siendo medida. La longitud de inmersión requerida para obtener una exactitud y tiempo de respuesta óptimos es una función de factores mecánicos tales como: tipo de elemento sensor, espacio disponible y diseño de la conexión del termopozo al recipiente o tubería. La inmersión óptima también depende de las consideraciones de transferencia de calor determinadas por las propiedades físicas del fluido, tales como su velocidad, entre otras. 333 MANTENIMIENTO INDUSTRIAL c.5 Instalación de termopares Las instalaciones industriales de termopares generalmente están constituidas por el termopar con su termopozo, nivel de extensión, cabeza de conexión, figura 414. Se requiere también una longitud de cable de extensión y un instrumento indicador, registrador o controlador con compensación automática de la junta de referencia. Los cables de extensión son generalmente del mismo material de los elementos del termopar, o pueden ser de otros materiales los cuales generen esencialmente el mismo milivoltaje que el termopar. A los efectos de realizar una buena instalación del termopar, se debe tener en cuenta los factores siguientes: - Conexión de la junta - Descalibración - Ruido - Medición de temperaturas promedio y diferencias de temperaturas • Conexión de la Junta: Existen varias formas de conectar dos cables de termopar: soldadura de plata y soldadura eléctrica. Los termopares comerciales son soldadas con equipos especiales para garantizar uniformidad en la soldadura. Una mala soldadura puede resultar en un “circuito abierto”. 334 MANTENIMIENTO INDUSTRIAL • Descalibración: La descalibración es el proceso de alteración de las características físicas del cable de termopar, de modo que no reproduce los valores dados por la NBS dentro de límites especificados. La descalibración puede producirse por la difusión de partículas atmosféricas dentro del metal causada por haber sometido el termopar a temperaturas extremas o por “trabajo en frío” del metal (un efecto que puede ocurrir cuando el cable es estirado a través de un conduit o sometido a esfuerzo por manejo inadecuado o vibración). • Ruido: Los circuitos de termopares están sujetos a tres. tipos principales de ruido: estático, magnético y común. El ruido estático es causado por un campo eléctrico radiado por una fuente de voltaje que esté siendo acoplada capacitivamente en el circuito del termopar. La mejor forma para evitar el ruido estático es colocando el circuito dentro de una pantalla, la cual aísla el par de cables del termopar de la influencia exterior. La pantalla debe ser aterrada. El ruido magnético es producido por corrientes que fluyen a través de conductores y piezas de equipos eléctricos, tales como motores, generadores, etc. La mejor forma de reducir este tipo de ruido es utilizando cables trenzados. Los cables trenzados hacen que el ruido se cancele en secciones adyacentes del cable. El ruido común es un problema que se presenta cuando hay dos tierras diferentes en un circuito con corriente fluyendo a través de ellas. La mayoría de los termopares utilizados son del tipo “aterrados”; esto es, la junta de medición está conectada física y eléctricamente al termopozo en el cual está instalada. Cuando el circuito de tierra (o pantalla) de un termopar (o cualquier objeto metálico cercano tal como el conduit, bandeja, etc.); está a un potencial diferente del de la junta de medición, fluyen corrientes en el cable de extensión produciéndose interferencias en la señal del termopar. El método común para evitar problemas de ruido común es aterrando el circuito de tierra del cable de extensión en la junta de medición. • Medición de Temperaturas Promedio y Diferencias de Temperaturas: Para medir la temperatura promedio de un proceso o equipo se pueden usar termopares conectados en paralelo. El voltaje en el instrumento es el promedio de los voltajes generados por cada uno de los termopares conectados en paralelo. Este voltaje es la suma de los voltajes individuales dividido por el número de termopares. Todos los termopares deben ser del mismo tipo y deben ser conectados utilizando los cables de extensión apropiados. Para evitar un flujo de corriente a través del circuito de tierra, los termopares no deben aterrarse. Para minimizar el efecto de resistencias no deseadas en los termopares y en sus cables de extensión en el punto de conexión paralela, se utiliza una resistencia en serie con cada termopar. Esta resistencia previene el flujo de corriente entre los termopares, lo cual podría inducir errores de medición. El valor de esta 335 MANTENIMIENTO INDUSTRIAL resistencia debería ser alto comparado con la resistencia total del circuito. Una resistencia de 1.500 Ohms, generalmente trabaja bien. Dos termopares pueden ser utilizados para medir la diferencia de temperatura entre dos puntos. Los termopares deben ser similares y se conectan utilizando cables de extensión del mismo material del termopar. La conexión debe hacerse de forma tal que los voltajes generados se opongan uno al otro. Al igual que en el caso de termopares en paralelo, los termopares no deben aterrarse. d. Termómetros de resistencia (RTD) El principio de operación de los detectores de temperatura tipo resistencia (RTD), está basado en el hecho de que la resistencia eléctrica de los metales varía directamente con la temperatura. La magnitud de este cambio frente a 1 °C de cambio en la temperatura, se conoce como el “coeficiente de resistencia de temperatura” (a). Para la mayoría de los metales puros, este coeficiente es constante dentro de un rango de temperatura. El cambio en la resistencia es una función del coeficiente de resistencia de temperatura y puede ser expresado por la ecuación: 𝑅𝑡 = 𝑅𝑜 1 + 𝛼 𝑇 Donde: Rt: Resistencia en Ohms a la temperatura T. RO: Resistencia en Ohms a la temperatura de referencia (generalmente 0 °C) α: Coeficiente de resistencia de temperatura. Los metales comúnmente utilizados en el diseño de detectores de resistencia son: platino el cual tiene un coeficiente de 0,00392 Ohms/ Ohms °C y se utiliza para medir temperaturas en el rango de -263 °C a + 545 °C, y níquel, el cual tiene un coeficiente de 0,0063 Ohms/ Ohms °C, utilizado para medir temperaturas en el rango de -190 °C a + 310 °C. Otros materiales utilizados son: plata, tungsteno, cobre y oro. Las características principales de los elementos utilizados como detectores de resistencia, están listados en la tabla 72. 336 MANTENIMIENTO INDUSTRIAL La construcción industrial del RTD es prácticamente idéntica a la de los termopares, en su apariencia externa generalmente no existe diferencia física. Los RTD se construyen de varios tipos: • En un circuito básico de dos cables se utiliza principalmente el tipo de conexión de dos hilos, con una conexión a cada terminal de la RTD. En este diseño, la resistencia de los cables de conexión, así como también las variaciones de resistencia por cambios en la temperatura ambiente, se incluyen en la medición de la resistencia de la RTD. Este tipo de configuración puede ser utilizado cuando los cables de conexión son cortos, de tal manera que su resistencia total sea despreciable, por ejemplo en transmisores-RTD integrados. • El tipo de 3-hilos es el normalizado. Los cables que conectan el RTD al circuito de medición tienen resistencias cuyos efectos ya mencionados, tienden a cancelarse. • La configuración de 4-hilos, es decir, dos hilos más lazo de compensación, proporciona mayor exactitud en la medición que las configuraciones anteriores. Si los cuatro hilos son del mismo diámetro, longitud y material, y están sujetos a los mismos cambios de temperatura ambiente, y los dos pares de hilos están en pares opuestos del circuito del puente de Wheatstone, la resistencia de los cables no tiene ningún efecto sobre la medición de la resistencia del RTD. En este tipo de configuración, los cuatro hilos están conectados al RTD, dos en cada extremo. Una corriente constante se suministra al RTD a través de los cables externos, y el voltaje del RTD se mide por medio de un voltímetro de alta impedancia, colocado en los dos hilos internos. De las configuraciones descritas, la más usada es la de 3 hilos, ya que proporciona suficiente exactitud para la mayoría de las mediciones industriales. Fig. 415.- Tipos de sondas de resistencia Los detectores de resistencia proporcionan una medición más exacta que la que es posible lograr cuando se utilizan termopares. Por lo tanto, los detectores de resistencia se utilizan en aquellas instalaciones donde se desea una gran exactitud. 337 MANTENIMIENTO INDUSTRIAL La variación de resistencia de las sondas es medida con un puente de Wheatstone dispuesto en montajes denominados de dos hilos, de tres hilos o de cuatro hilos, según sean los hilos de conexión de la sonda de resistencia al puente. En la figura 416 pueden verse estos distintos tipos de montaje. Fig. 416.- Tipos de circuitos de puente de Wheatstone a sondas de resistencia La medición automática de la resistencia y por lo tanto de la temperatura se lleva a cabo mediante instrumentos autoequilibrados que utilizan un circuito de puente de Wheatstone. En la figura 417 puede verse uno de estos instrumentos. La sonda de resistencia está conectada al puente mediante un circuito de tres hilos. Si el puente está desequilibrado la señal de error en forma de tensión continua que aparece en AA (fig. 417) es convertida a una tensión alterna (BB) y amplificada en tensión (CC) y potencia (DD), para excitar el motor de equilibrio E. Éste se mueve en la dirección adecuada para equilibrar el puente a través del brazo móvil del reóstato que al mismo tiempo acciona los mecanismos asociados de indicación, registro y control. Fig. 417.- Puente de Wheatstone para sonda de resistencia 338 MANTENIMIENTO INDUSTRIAL Otros instrumentos utilizan un puente de capacidades con un condensador variable cuya posición está calibrada en función de la temperatura, alimentándose el circuito con la tensión alterna estabilizada de un oscilador. En la figura 418 puede verse uno de estos instrumentos en el que puede observarse en forma análoga al circuito de puente de Wheatstone que, ante una señal de error el amplificador alimenta el motor de equilibrio que acciona el condensador variable. Fig. 418.- Puente de capacidades para sonda de resistencia Otro instrumento es el indicador galvanométrico de puente de resistencias (fig. 419). Su ajuste se realiza colocando el interruptor en la posición STD (estandarización) para incluir la resistencia X en el circuito puente, y ajustando el reóstato RH hasta que el indicador señala la lectura más baja de la escala. Seguidamente se pasa el interruptor a la posición de conexión de la sonda pudiendo ya leerse directamente la temperatura. Fig. 419.- Indicador galvanométrico de puente de resistencias La adición de un microprocesador a la sonda de resistencia permite obtener un transmisor «inteligente» con la posibilidad del cambio automático del sensor o del campo de medida, la obtención por hardware o software de puentes de Wheatstone o de capacidades de distintas características, etc. 339 MANTENIMIENTO INDUSTRIAL e. Termistores Los Termistores son semiconductores electrónicos con un coeficiente de temperatura de resistencia negativo de valor elevado, por lo que presentan unas variaciones rápidas y extremadamente grandes para los cambios relativamente pequeños en la temperatura. Los Termistores se fabrican con óxidos de níquel, manganeso, hierro, cobalto, cobre, magnesio, titanio y otros metales, y están encapsulados. La relación entre la resistencia del termistor y la temperatura viene dada por la expresión: 𝑅𝑡 = 𝑅𝑜 𝑒 1 1 𝛽 𝑇 −𝑇 𝑡 𝑜 Donde: Rt : Resistencia en ohmios a la temperatura absoluta Tt Ro : Resistencia en ohmios a la temperatura absoluta de referencia To β : Constante dentro de un intervalo moderado de temperaturas Así como el RTD, el termistor es también una resistencia sensible a la temperatura, mientras que el termopar es el transductor de temperatura más versátil; y el RTD es el más estable, el termistor es el más sensible. Los Termistores generalmente están constituidos de materiales semiconductores. La mayoría de los Termistores tienen un coeficiente de temperatura negativo; esto es, su resistencia disminuye al aumentar la temperatura. La mayoría de los Termistores exhiben grandes coeficientes de temperatura (lo que les permite detectar cambios mínimos en la temperatura), y una respuesta altamente no lineal. La figura 420 muestra la variación del voltaje o la resistencia en función de la temperatura para termopares, RTD y Termistores. En esta figura puede notarse que mientras el termopar y el RTD exhiben una respuesta más o menos lineal, los Termistores producen una respuesta no lineal. 340 MANTENIMIENTO INDUSTRIAL Los termistores se conectan a puentes de Wheatstone convencionales o a otros circuitos de medida de resistencia. La distancia entre el termistor y el instrumento de medida puede ser considerable siempre que el elemento posea una alta resistencia comparada con la de los cables de unión. La corriente que circula por el termistor a través del circuito de medida debe ser baja para garantizar que la variación de resistencia del elemento sea debida exclusivamente a los cambios de temperatura del proceso. Los termistores encuentran su principal aplicación en la medición, la compensación y el control de temperatura, y como medidores de temperatura diferencial. Debido a que los Termistores están constituidos por semiconductores, son más susceptibles a descalibrarse a altas temperaturas, si se les compara con los termopares o los RTD. El uso de los Termistores generalmente está limitado a rangos de temperatura de 100 a 400 °C aproximadamente. En la tabla 73 se presenta un cuadro comparativo entre termopares, RTD y Termistores. 341 MANTENIMIENTO INDUSTRIAL f. Pirómetros de radiación La mayoría de las mediciones de temperatura se realizan colocando el sensor dentro de un termopozo en contacto con el medio cuya temperatura se quiere medir. Sin embargo, el contacto del sensor con el medio es difícil o impráctico cuando el objeto se está moviendo, el ambiente es corrosivo, abrasivo, está a una temperatura extremadamente alta, o el objeto es muy pequeño, muy largo, o muy frágil, está inaccesible o la medición está siendo realizada al vacío. Bajo estas condiciones es más conveniente utilizar un sensor que no entra en contacto con el objeto o el medio. Estos sensores son los Pirómetros de Radiación. Fig. 421.- Pirómetro de infrarrojos o radiación total Los pirómetros de radiación permiten medir temperatura sin contacto físico con el medio. Esto es posible debido a que todos los objetos emiten energía radiante, siendo la intensidad de esta radiación proporcional a la temperatura. La medición de temperatura utilizando pirómetros de radiación está basada en la ley que establece que: “entre dos cuerpos que están a diferentes temperaturas, existe una transferencia neta de energía radiante desde el cuerpo más caliente hacia el cuerpo más frío”. Esta ley también establece que la cantidad de energía transferida por unidad de tiempo es proporcional a la cuarta potencia de la diferencia de temperatura entre los dos cuerpos, esta ley se conoce como la Ley de Stefan-Boltzmann y viene dada por la siguiente ecuación: 𝐸 = 𝐾 𝑇𝑏4 − 𝑇𝑎4 𝑇𝑏 > 𝑇𝑎 Donde: K : Constante de Boltzmann : 5,57 x 10-5 erg / seg / cm2 °K4. Tb : Temperatura del cuerpo caliente °K. Ta : Temperatura del cuerpo frío °K. La radiación es un fenómeno ondulatorio análogo a la luz y ocupa un lugar definido en el espectro. Los pirómetros que responden a todas las longitudes de onda y por lo tanto operan bajo la ecuación de Stefan-Boltzmann, se denominan Pirómetros de Radiación Total. Otra clase de pirómetros que utilizan solamente bandas angostas de 342 MANTENIMIENTO INDUSTRIAL longitud de onda en el espectro visible, se conocen con el nombre de Pirómetros Ópticos. Por lo tanto un pirómetro de radiación total es no selectivo, mientras que un pirómetro óptico es selectivo. Otro tipo de pirómetro que es parcialmente selectivo se denomina Pirómetro de Radiación Parcial. En la figura 422 pueden verse varios esquemas de aplicaciones industriales de los pirómetros de radiación. Fig. 422.- Aplicaciones de los pirómetros de radiación Campo de medida En la figura 423 puede verse un resumen del campo de medida de los distintos instrumentos de temperatura. Fig. 423.- Campo de medida de los instrumentos de temperatura. 343 MANTENIMIENTO INDUSTRIAL 5.- Medidas de Análisis En los apartados anteriores se ha estudiado la medición y transmisión de las variables de proceso más comunes que se encuentran en la industria: la presión, el caudal, el nivel y la temperatura. Existen otras muchas variables que son también de interés industrial y que pueden clasificarse como físicas y químicas. Las variables físicas son aquellas relacionadas con las causas físicas que actúan sobre un cuerpo, con su movimiento o bien con las propiedades físicas de las sustancias. Entre ellas tenemos: el peso, la velocidad, la densidad y el peso específico, la humedad y el punto de rocío, la viscosidad y la consistencia, la llama, el oxígeno disuelto, la turbidez y la radiación solar. Las variables químicas están relacionadas con las propiedades químicas de los cuerpos o con su composición. Entre ellas se encuentran la conductividad, el pH, redox, y la composición de los gases en una mezcla. Una variante muy específica de las variables de proceso son las medidas de análisis (variables físicas y químicas). En el mundo de las plantas industriales existen infinidad de variables que se pueden medir, siendo estas tan complejas como uno se pueda imaginar. No es misión de este curso el entrar en detalle sobre todas y cada una de las variables, así como en las posibles tecnologías. Tampoco existe una diferenciación clara de cómo clasificar dichas tecnologías. Un punto muy importante a tener en cuenta es que la mayoría de los analizadores requieren de un sistema de extracción de la muestra, de una línea de transporte de la muestra y de un sistema de acondicionamiento de muestras. En algunos casos es más importante el transporte y acondicionamiento que el propio analizador. Una posible clasificación de las medidas de análisis podría ser: – Analítica de Agua-Vapor. – Analítica de Emisiones. – Analítica de otras propiedades físicas-químicas. A continuación simplemente enumeramos las medidas de análisis más utilizadas en la industria y plantas de proceso, de acuerdo a la anterior clasificación. 344 MANTENIMIENTO INDUSTRIAL Analítica de Agua-Vapor Los parámetros mas medidos en los ciclos agua-vapor son: – Conductividad. – pH. – Oxigeno Disuelto. – Ozono. – Sólidos en suspensión – Sílice. – Cloro. – Sílice. – Sodio. – Fosfatos. – Turbidez. – Hidrácida. – Cloro. – TOC (Carbono Orgánico Total) – Hierro/Cobre. La misión principal de este tipo de analizadores, es la de controlar dichos parámetros, para poder proteger sistemas y “avisar” de la necesidad de tratar químicamente los fluidos (dosificar), así como para comprobar la calidad de ciertos fluidos bien de consumo o de sus efluentes. Fig. 424 345 MANTENIMIENTO INDUSTRIAL Analítica de Emisiones y Condiciones Atmosféricas. Los parámetros más medidos para la monitorización de emisiones son: – Contenido de Oxigeno. – COV (Compuestos Orgánicos Volátiles) – CO. – CO2. – SO2. – NOx. – Opacidad (partículas). La misión principal de este tipo de analizadores, es la de controlar las emisiones a la atmósfera de las plantas industriales. Hoy en día, y sobre todo a partir de los requerimientos del protocolo de Kioto, estas medidas se están requiriendo cada vez más para poder controlar las emisiones. Fig. 425 Dentro de este apartado, aunque no son específicamente emisiones, se podrían incluir las condiciones atmosféricas, como: – Velocidad y Dirección del Viento. – Pluviosidad. – Humedad relativa – Temperatura Ambiente. – Radiación Solar. 346 MANTENIMIENTO INDUSTRIAL Analítica de otros parámetros Físicos-Químicos Aparte de los parámetros anteriormente indicados, que quizás sean los más empleados en la mayoría de las plantas de proceso, existen otros muchos parámetros más específicos dependiendo del tipo de proceso. Entre otros se podrían enumerar: – Pour Point (Refinación y Petroquímicas). – Presión de Vapor Reid “PVR” (Refinación y Petroquímicas). – Punto de Inflamación (Refinación y Petroquímicas). – Punto de Nube (Refinación y Petroquímicas). – Punto de Congelación (Refinación y Petroquímicas). – Viscosidad (Refinación y Petroquímicas). – Color (Refinación y Petroquímicas). – Poder Calorífico (Refinación y Petroquímicas). – Indice de Wobbe (Refinación y Petroquímicas). – Punto de destilación (Refinación y Petroquímicas). – H2S en Hidrocarburos (Refinación y Petroquímicas). – Azufre Total en Hidrocarburos (Refinación y Petroquímicas). – Hidrocarburos en Agua (Refinación y Petroquímicas). – Cromatografía de gases (composición de gases). – Índice de refracción (Refinación y Petroquímicas). – Monitor de sal en crudo (Refinación y Petroquímicas). – Humedad relativa en gases (Refinación, Petroquímicas, Plantas de prod. Gases, etc.). – Punto de Rocío en gases (Refinación, Petroquímicas, Plantas de prod. Gases, etc.). – Pureza de Oxigeno (Plantas de prod. Gases). – Trazas de N2 en corriente de Argón (Plantas de prod. Gases). – Pureza de O2 (Plantas de prod. Gases). – Trazas de O2 (Plantas de prod. Gases). – Densidad en líquidos – Detección de Interfases. – Consistencia (Papeleras). – Blancura (Papeleras). Por último otra variante de los analizadores son los detectores de gases y fuego. Estos son utilizados en las plantas para detectar fugas de gases peligrosos para el cuerpo humano (H2SO4, HF, Amoniaco, etc.), o por posibles explosiones (gases de hidrocarburos, etc.). 347 MANTENIMIENTO INDUSTRIAL Fig. 426 348 MANTENIMIENTO INDUSTRIAL ELEMENTOS FINALES DE CONTROL En la mayor parte de los procesos industriales aparecen lazos de control formados por tres elementos típicos: transmisor, regulador y válvula. Actuando conjuntamente garantizan una operación controlada y eficiente de la planta junto con otros equipos automáticos Los avances de la electrónica en la instrumentación industrial han ido desplazando a la neumática clásica que fue pionera en la automatización. Más recientemente la incorporación de la electrónica digital permite usar transmisores inteligentes, sistemas de control distribuido y avanzado optimizando, aún más, los procesos de producción. Todas estas novedades, que se desarrollan a alta velocidad, concentran la atención de los ingenieros de control a la hora de definir y diseñar los sistemas, dedicando menos tiempo y atención a las válvulas de control. Una especificación superficial de las válvulas, bien en fase de proyecto ó en fase de compra, dejaría la selección a una arriesgada “ingeniería de precio” donde no se valore adecuadamente la visión global del sistema de control y sus objetivos. A diferencia de otros instrumentos, la válvula de control está siempre modulando energía y es pieza clave que puede minimizar la eficacia de un sistema de control sofisticado y caro. Es por esto la necesidad de elevar el nivel de exigencia en los criterios de selección de las válvulas de control para lo que se requiere una mayor formación y conocimiento de su tecnología, que también ha evolucionado en los últimos años como consecuencia de un mayor conocimiento de los fenómenos físicos que tienen lugar en plantas donde se trabaja a altas presiones y temperaturas, los nuevos materiales disponibles y la mejora en los sistemas de cálculo. El objetivo de este apartado es el apreciar la importancia que tienen las válvulas de control dentro de los procesos industriales y tener una breve idea de los tipos a emplear en control. En cuanto a constitución mecánica, las válvulas de control tienen las mismas configuraciones que las válvulas manuales, es decir, pueden ser del tipo: – Globo o asiento. – Mariposa. – Bola. – Compuerta. – Macho. – Diafragma. – Etc. 349 MANTENIMIENTO INDUSTRIAL Dentro de las válvulas de control se podrían distinguir dos tipos en función del tipo de control: – Válvulas Todo-Nada – Válvulas de Control. La principal diferencia entre una y otra, es que la primera solamente actúa en dos posiciones, o abierta o cerrada y se suele utilizar en controles on-off. La segunda se utiliza para el control continuo de procesos y está continuamente modulando y buscando la posición de equilibrio requerida por el sistema. Fig. 427 Un factor muy importante en las válvulas de control es su especificación, para ello se deben tener en cuenta una serie de factores importantes. A continuación se dan unas pautas para la especificación y selección de las válvulas. 350 MANTENIMIENTO INDUSTRIAL 351 MANTENIMIENTO INDUSTRIAL 352 MANTENIMIENTO INDUSTRIAL 353 MANTENIMIENTO INDUSTRIAL 354 MANTENIMIENTO INDUSTRIAL Por último, se adjunta un plano de una válvula de control con los diferentes componentes. Fig. 428.- Válvula de control 355 MANTENIMIENTO INDUSTRIAL SISTEMAS DE CONTROL El objetivo de este apartado no es el explicar en detalle lo que es un sistema de control, ni como se debe especificar, sino que se entienda como se integra dentro de todo lo que hemos hablado hasta ahora, es decir cómo se cierra el círculo desde un instrumento que mide la variable de proceso, hasta el elemento final de control, pasando por el sistema de control. Los sistemas de control tienen la misión de recibir las variables de proceso procedentes de los instrumentos, procesarlas, ejecutar órdenes y gestionar las salidas a los elementos finales de control (control o todo-nada). Como información y cultura general, a continuación se dan unas fechas de la evolución que pueden ser interesantes: – Etapa inicial: 1958 a 1964 – Ordenador Centralizado: 1965 a 1970 – Miniordenadores: 1971 a 1975 – Control Distribuido: desde 1975 A grandes rasgos existen dos posibilidades a la hora de seleccionar el tipo de sistema de control a utilizar, por una parte están los Controladores Lógicos Programables (PLC´s) unidos a un SCADA (Supervisory Control and Data Adquisition), y por otra están los SCD´s (Sistemas de Control Distribuido). Existe un gran debate abierto sobre la conveniencia de utilizar uno u otro, especialmente generado por los grandes suministradores de sistemas, pero lo cierto es que cada vez más se parecen unos a otros. Los primeros se utilizan cuando el control es principalmente “discreto” (todo-nada) o el volumen de señales es relativamente pequeño. El SCD se utiliza para grandes proyectos y control mayoritariamente analógico. Otro punto a tener en cuenta son las comunicaciones e interfases, con otros sistemas. La mayoría de suministradores ya aceptan casi todos los protocolos de comunicaciones, todo tipo de señales de entrada/salida etc. Centrándonos un poco más en los SCD, estos se basan en tres principales subsistemas: – Interfase con el proceso (tarjetas de entrada/salida, controladores, etc.). – Interfase con el operador (pantallas de visualización y software). – Vías de datos o buses de interconexión (redes Ethernet, profibus, etc.). 356 MANTENIMIENTO INDUSTRIAL A continuación se muestra un plano de arquitectura que puede valer para un PLC+SCADA o para un SCD. Fig. 429 Digamos que la interfase con el proceso, y más en concreto los controladores, son el corazón de la instalación, y por el pasa toda la información. En el sistema de control se ejecuta todas las acciones de control como pueden ser: – Control analógico. – Control todo-nada. – Gestión de alarmas. – Generación de informes. – Registro de señales. – Funciones de cálculo. – Secuencias de arranque. – Gestión de las comunicaciones. 357 MANTENIMIENTO INDUSTRIAL 6.4. Tareas de mantenimiento 6.4.1. Introducción Se puede afirmar que el mantenimiento engloba las operaciones y cuidados necesarios para que los edificios, instalaciones y equipos funcionen adecuadamente, desempeñando correctamente el servicio para el que fueron diseñados. Hay que subrayar que el mantenimiento busca, ante todo, conservar el servicio que suministra cada uno de los equipos, instalaciones y otros elementos; no la conservación física de los mismos; en otras palabras, es más importante el servicio que presta cada elemento que el elemento mismo. Las anteriores aseveraciones, no son conceptos extraños cuando se hace referencia al mantenimiento de las instalaciones productivas. El objetivo del mantenimiento es prolongar la vida útil, de manera económica favorable, de todos los recursos incluso el medio ambiente en el que se desarrollan las actividades de la empresa; por medio de actividades y procedimientos que buscan evitar el desgaste y destrucción de los bienes puestos al servicio del proceso productivo, hasta la restitución del servicio de algún elemento cuando se presente una anomalía que lo interrumpa. Las tareas en mantenimiento son los trabajos que podemos realizar para cumplir el objetivo de evitar el fallo o minimizar sus efectos. Estas operaciones se atendrán a lo dispuesto en las reglamentaciones industriales específicas en cuanto a su periodicidad, contenidos de las mismas y requisitos que deben cumplir quienes efectúen estos trabajos. Los principales aspectos a considerar en relación a las tareas se referirán a: - Elementos, mecanismos y secciones para clasificar y el tipo de actividades específicas que se les va a proporcionar a cada máquina o equipo. - Establecer el tipo y la frecuencia para la realización de las actividades del mantenimiento preventivo. Si bien, inicialmente solo contamos con las instrucciones y/o recomendaciones del fabricante (manuales de operación y mantenimiento), la acumulación de datos históricos de reparaciones de maquinaria y equipos, la cual se efectúa por medio de tarjetas de registro de fallas y sus correspondientes reparaciones realizadas, permite conocer los problemas, analizar las condiciones y dificultades ocurridas, y nos indicarán las acciones que debemos implantar. 358 MANTENIMIENTO INDUSTRIAL Las actividades generales que son proporcionadas, son: Inspección: Se realiza con el fin de detectar: • • • Fallas en potencia; Condiciones generales de funcionamiento; Confiabilidad de la operación. Servicio: Se realiza con el fin de conservar en óptimas condiciones de funcionamiento por medio de: • • • • Lubricación; Limpieza; Ajuste; Pintura. Cambio: Se realiza en base a los registros, experiencia del personal y recomendaciones del fabricante y los distribuidores, respecto a ciertas partes o elementos de maquinaria y/o equipo para conservar la eficiencia de estos dentro de los parámetros de funcionamiento. A partir del conocimiento exhaustivo de las características de los elementos y equipos, componentes de cada instalación concreta, y una vez catalogados por familias o grupos y cumplimentadas sus correspondientes fichas, se podrán establecer las gamas o protocolos de revisiones específicas, de mantenimiento preventivo, que se deberán aplicar inicialmente a cada equipo o conjunto. Para la identificación de estos protocolos específicos debemos preparar un conjunto de tareas genéricas que les serían de aplicación a cada uno de los tipos de equipos. Así, podemos preparar tareas genéricas de mantenimiento para transformadores, motores, bombas, válvulas, etc. Como complemento de los protocolos de revisiones de mantenimiento preventivo propuestos se deberán planificar las actuaciones de mantenimiento Técnico Legal que correspondan a cada elemento de cada instalación específica. Recuerde que cada planta es diferente, y en ocasiones las áreas de una planta no son similares, depende del trabajo que se realiza en cada una de ellas, el tipo de maquinaria, el recurso humano disponible, ambiente de utilización, ambiente laboral, etc. Sin embargo se realizará un plan general y se ajustará según las necesidades. 359 MANTENIMIENTO INDUSTRIAL 6.4.2. Rutinas de mantenimiento preventivo planificado (MPP) Debido a la importancia del MPP en la prolongación de la vida útil de los equipos, y en el mantenimiento de su funcionamiento adecuado, se han determinado diez pasos generales que debe poseer una rutina de mantenimiento. Estos pasos generales son los que constituyen la base de las rutinas para cada equipo; su aplicabilidad es determinada por las características específicas de cada equipo. Estos pasos son: 1. Inspección de condiciones ambientales 2. Limpieza integral externa 3. Inspección externa del equipo * 4. Limpieza integral interna 5. Inspección interna * 6. Lubricación y engrase * 7. Reemplazo de ciertas partes 8. Ajuste y calibración * 9. Revisión de seguridad eléctrica * 10. Pruebas funcionales completas * * Acciones que involucran posible verificación funcional. 1. Inspección de las condiciones ambientales en las que se encuentra el equipo: Observar las condiciones del ambiente en las que se encuentra el equipo, ya sea en funcionamiento o en almacenamiento. Los aspectos que se recomienda evaluar son: humedad (sólo para equipos electrónicos), exposición a vibraciones mecánicas (sólo para equipos electrónicos), presencia de polvo, seguridad de la instalación y temperatura (para equipos eléctricos, mecánicos y electrónicos). Cualquier anormalidad o no cumplimiento de estas condiciones con lo establecido, debe ser notificado como observación en la rutina, o inmediatamente dependiendo de la situación, y siguiendo el procedimiento especificado por el Jefe del Departamento de Mantenimiento. � Humedad: La humedad del ambiente en el que trabaja el equipo, no debe ser mayor a la que especifica el fabricante. Si no se cuenta con esta información, o con los medios adecuados de medición, se puede evaluar por sus efectos, por ejemplo oxidación de la carcasa, levantamiento de pintura de paredes o del equipo, etc. NOTA: Este aspecto está relacionado con la inspección visual del equipo. � Vibraciones mecánicas: Las vibraciones mecánicas pueden ser causa de falta de calibración mecánica o electrónica de algunos equipos, sobre todo los que necesitan determinada precisión en los procedimientos que realizan. 360 MANTENIMIENTO INDUSTRIAL � Polvo: Tanto los equipos electrónicos, como los eléctricos y mecánicos, se ven afectados en su funcionamiento y en la duración de su vida útil, por la presencia de polvo en su sistema. Revise que no haya una presencia excesiva de polvo en el ambiente, visualizando los alrededores del equipo, en el equipo mismo, o la existencia de zonas cercanas donde se produzca el mismo. � Seguridad de la instalación: Una instalación de un equipo insegura, ofrece un peligro potencial tanto al equipo mismo, como a las personas. Revise que la instalación del equipo ofrezca seguridad, ya sea que esté montado sobre una superficie, instalado en la pared, o sobre una superficie móvil. Si utiliza fijadores de succión (ventosas) verifique que estos estén en buenas condiciones, si el equipo posee puertas con apertura horizontal, revise la nivelación del mismo. Además verifique que la instalación eléctrica a la que éste está conectado, se encuentre polarizada, protegida con medios de desconexión apropiados, y de instalación mecánica segura que no permita la producción de cortocircuitos o falsos contactos por movimientos mecánicos normales. Esto implicará el tomacorriente, y subtablero de protección y distribución más cercano. � Temperatura: La luz solar directa o la temperatura excesiva pueden dañar el equipo, o alterar su funcionamiento. Verifique cual es la temperatura permitida por el fabricante, si este dato no está disponible, corrobore que el equipo no esté en exposición directa al sol (a menos que se trate de un equipo de uso de intemperie), y que la temperatura no sea mayor a la del ambiente. En los equipos de refrigeración es importante que las instalaciones permitan disipar el calor proveniente del condensador, esto requiere circulación libre de aire por el mismo, y que no existan otros equipos o condiciones que eleven la temperatura ambiental en la que se encuentran estos equipos. NOTA: Para cada equipo deberán evaluarse la aplicabilidad de las condiciones. 2. Limpieza integral externa: Eliminar cualquier vestigio de suciedad, desechos, polvo, moho, hongos, etc., en las partes externas que componen al equipo, mediante los métodos adecuados según corresponda. Esto podría incluir: • Limpieza de superficie externa utilizando limpiador de superficies líquido, lija, limpiador de superficies en pasta (robbin), etc. • Limpieza de residuos potencialmente infecciosos utilizando sustancias desinfectantes como bactericidas y virucidas no residuales ni corrosivas en equipos como centrífugas, microcentrífugas, bombas de infusión, etc. 361 MANTENIMIENTO INDUSTRIAL NOTAS: Para esta tarea el técnico deberá utilizar los medios de protección necesarios (Por ejemplo: guantes, mascarilla, gavacha, etc.) De preferencia aquellos equipos que presenten en el mantenimiento del operador esterilización, deben ser recibidos por el personal de mantenimiento sólo cuando ya se haya realizado este procedimiento. 3. Inspección externa del equipo: Examinar o reconocer atentamente el equipo, partes o accesorios que se encuentran a la vista, sin necesidad de quitar partes, tapas, etc., tales como mangueras, chasis, rodos, cordón eléctrico, conector de alimentación, para detectar signos de corrosión, impactos físicos, desgastes, vibración, sobrecalentamiento, fatiga, roturas, fugas, partes faltantes, o cualquier signo que obligue a sustituir las partes afectadas o a tomar alguna acción pertinente al mantenimiento preventivo o correctivo. Esta actividad podría conllevar de ser necesario, la puesta en funcionamiento de un equipo o de una parte de éste, para comprobar los signos mencionados en el párrafo anterior. Actividades involucradas: a) Revisión del aspecto físico general del equipo y sus componentes, para detectar posibles impactos físicos, maltratos, corrosión en la carcasa o levantamiento de pintura, cualquier otro daño físico. Esto incluye viñetas y señalizaciones, falta de componentes o accesorios, etc. b) Revisión de componentes mecánicos, para determinar falta de lubricación, desgaste de piezas, sobrecalentamiento, roturas, etc. Esto incluye los sistemas neumáticos e hidráulicos, en los cuales también es necesario detectar fugas en el sistema. c) Revisión de componentes eléctricos. Esto incluye: Cordón de alimentación: revisar que este se encuentre íntegro, sin dobleces ni roturas, o cualquier signo de deterioro de aislamiento, el toma deberá ser adecuado al tipo y potencia demandada por el equipo y debe hacer buen contacto con el toma de pared. Hacer mediciones con un multímetro si es necesario acerca de la conductividad del mismo, estado del portafusibles, etc. Cables de tomas: revisar que se encuentren íntegros, sin dobleces ni roturas, y que hace un buen contacto con el conector respectivo. Hacer mediciones de conductividad con un multímetro y con un simulador de instrumentación verificando la buena transmisión de la señal. 362 MANTENIMIENTO INDUSTRIAL 4. Limpieza integral interna: Eliminar cualquier vestigio de suciedad, desechos, polvo, moho, hongos, etc., en las partes internas que componen al equipo, mediante los métodos adecuados según corresponda. Esto podría incluir: • Limpieza de superficie interna utilizando limpiador de superficies líquido, lija, limpiador de superficies en pasta (robbin), etc. • Limpieza de residuos potencialmente infecciosos utilizando sustancias desinfectantes como bactericidas y virucidas no residuales ni corrosivas en equipos como centrífugas, microcentrífugas, bombas de infusión, etc. • Limpieza de tabletas electrónicas, contactos eléctricos, conectores, utilizando limpiador de contactos eléctricos, aspirador, brocha, etc. 5. Inspección interna: Examinar o reconocer atentamente las partes internas del equipo y sus componentes, para detectar signos de corrosión, impactos físicos, desgastes, vibración, sobrecalentamiento, fatiga, roturas, fugas, partes faltantes, o cualquier signo que obligue a sustituir las partes afectadas o a tomar alguna acción pertinente al mantenimiento preventivo o correctivo. Esta actividad podría conllevar de ser necesario, la puesta en funcionamiento de un equipo o de una parte de éste, para comprobar los signos mencionados en el párrafo anterior. Actividades involucradas: Revisión general del aspecto físico de la parte interna del equipo y sus componentes, para detectar posibles impactos físicos, maltratos, corrosión en la carcasa o levantamiento de pintura, cualquier otro daño físico. Revisión de componentes mecánicos, para determinar falta de lubricación, desgaste de piezas, sobrecalentamiento, roturas, etc. Esto incluye los sistemas neumáticos e hidráulicos, en los cuales también es necesario detectar fugas en el sistema. Revisión de componentes eléctricos, para determinar falta o deterioro del aislamiento, de los cables internos, conectores etc., que no hayan sido verificados en la 363 MANTENIMIENTO INDUSTRIAL revisión externa del equipo, revisando cuando sea necesario, el adecuado funcionamiento de estos con un multímetro. Revisión de componentes electrónicos, tanto tarjetas como circuitos integrados, inspeccionando de manera visual y táctil si es necesario, el posible sobrecalentamiento de estos. Cuando se trata de dispositivos de medición (amperímetros, voltímetros, etc.) se debe visualizar su estado físico y comprobar su funcionamiento con otro sistema de medición que permita verificarlo con adecuada exactitud. 6. Lubricación y engrase: Lubricar y/o engrasar ya sea en forma directa o a través de un depósito, motores, bisagras, baleros, y cualquier otro mecanismo que lo necesite. Puede ser realizado en el momento de la inspección, y deben utilizarse los lubricantes recomendados por el fabricante o sus equivalentes. 7. Reemplazo de ciertas partes: La mayoría de los equipos tienen partes diseñadas para gastarse durante el funcionamiento del equipo, de modo que prevengan el desgaste en otras partes o sistemas del mismo. Ejemplo de estos son los empaques, los dispositivos protectores, los carbones, etc. El reemplazo de estas partes es un paso esencial del mantenimiento preventivo, y puede ser realizado en el momento de la inspección. 8. Ajuste y calibración: En el mantenimiento preventivo es necesario ajustar y calibrar los equipos, ya sea ésta una calibración o ajuste mecánico, eléctrico, o electrónico. Para esto deberá tomarse en cuenta lo observado anteriormente en la inspección externa e interna del equipo, y de ser necesario poner en funcionamiento el equipo y realizar mediciones de los parámetros más importantes de éste, de modo que éste sea acorde a normas técnicas establecidas, especificaciones del fabricante, o cualquier otra referencia para detectar cualquier falta de ajuste y calibración. Luego de esto debe realizarse la calibración o ajuste que se estime necesaria, poner en funcionamiento el equipo y realizar la medición de los parámetros correspondientes, estas dos actividades serán necesarias hasta lograr que el equipo no presente signos de desajuste o falta de calibración. 9. Pruebas funcionales completas: Además de las pruebas de funcionamiento realizadas en otras partes de la rutina, es importante poner en funcionamiento el equipo en conjunto con el operador, en todos los modos de funcionamiento que éste posea, lo cual además de detectar posibles fallas en el equipo, promueve una mejor comunicación entre el técnico y el operador, con la consecuente determinación de fallas en el proceso de operación por parte del operador o del mismo técnico. 364 MANTENIMIENTO INDUSTRIAL 10. Revisión de seguridad eléctrica: La realización de esta prueba se realizará de acuerdo a la normativa aplicable. El cuidado para llenar el formulario de cada rutina es muy importante, pues así no se descuidan detalles que hacen al MPP más efectivo. Cada parte del formato debe ser completado por el personal encargado de ejecutar la rutina. 6.4.3. Tareas en las operaciones de automantenimiento A continuación describimos una serie de tareas especialmente apropiadas para elaborar gamas y estándares de automantenimiento. 1. Mecánica - verificar estado superficial de guías de deslizamiento, - detectar ruidos y holguras, colaborando en su corrección, - observar posibles holguras de bridas-mecanismos de transferización, etc. aprovechando los cambios de útiles y herramientas, - observar estado y cambiar, si procede, pequeño utillaje de desgaste como casquillos-guía, garras, bridas, etc. - verificar acoplamientos, juegos de rodamientos y todo tipo de fijaciones y ejes de transmisión, - asegurarse que todas las fijaciones con tornillos están correctamente ensambladas y no hay tornillos flojos o rotos. 2. Herramientas y útiles de control - efectuar reglajes y preparaciones de útiles y herramientas, - efectuar cambios de herramientas y utillaje a los frecuenciales establecidos, - conservar en buen estado los porta-herramientas, - revisar estado de palpadores y calibres, efectuando etalonados cuando proceda. 365 MANTENIMIENTO INDUSTRIAL 3. Circuitos hidráulicos - verificar diariamente el nivel de aceite y rellenar si procede comprobando las causas y controlando consumos, - comprobar presiones de todo el sistema hidráulico, - observar ruidos o calentamientos excesivos en la bomba del grupo hidráulico, - localizar fugas en todo el circuito (cilindros, válvulas, distribuidores, tuberías, etc.) y corregir si es posible o bien comunicar deficiencia a los profesionales de mantenimiento, - verificar existencia de posibles vibraciones en la red o golpes de ariete, avisando a los profesionales de mantenimiento si procede, - reapretar racores de unión y comprobar buena fijación de soportes de tuberías. 4. Circuitos de engrase - verificar niveles de aceite de engrase y rellenar si es necesario, así como presiones de engrase sobre vasos lubricadores, mecafluid, atomizadores, reductoras, etc. - localizar fugas y corregir si es posible, - asegurarse de la llegada de lubricante a todos los puntos de destino, - en general, observar fugas por uniones de tuberías comprobando fijaciones y corrigiendo si es posible. 5. Circuitos eléctricos - mantener puertas cerradas de los armarios, - quitar tensión al finalizar la jornada utilizando seccionador general situado sobre armario eléctrico, - comprobar lámparas de señalización cambiando si es necesario (test de lámparas), - observar estado y posicionamiento correcto de detectores y finales de carrera, limpiando y reglando si es necesario, 366 MANTENIMIENTO INDUSTRIAL - observar estado de juntas de estanqueidad de dispositivos eléctricos, cambiando si están deteriorados, - avisar a los servicios de mantenimiento tras observar cualquier anomalía en el ciclo de trabajo no subsanada de inmediato, - verificar estado general de canalizaciones eléctricas de todo el circuito y estado de bandejas porta-cables, - limpieza exterior de motores eléctricos y revisión de estado de ventiladores, comprobando consumo, ruidos extraños, calentamientos, etc., - mantener limpio y en buen estado las protecciones visuales de autómatas, lámparas de señalización, etc. 6. Circuitos neumáticos - verificar estado general de redes del circuito, cilindros y distribuidores, corrigiendo fugas si existen y reapretar racores, - a final de jornada de trabajo cerrar la llave de paso general de aire comprimido, - realizar la purga de filtros semiautomáticos y manuales de los equipos de acondicionamiento, - verificar diariamente nivel de aceite en vaso del equipo acondicionador de aire, - limpiar silenciosos de escape, - observar presiones en manómetros, reglando si es necesario, - comprobar el estado de componentes del circuito neumático. 7. Equipos de manutención y de alimentación - verificar estado general de rodillos transportadores, comprobando holguras y ruidos extraños, - verificar estado general de protecciones, - revisar y corregir, si procede, holguras y desgastes en cadenas y cintas transportadoras, - observar ruidos y calentamiento en motor-reductores, comprobando: 367 MANTENIMIENTO INDUSTRIAL - nivel de aceite, - tensión de cadena, - ruidos y calentamientos anormales, - verificar y realizar, si procede, lubricación de piñones y cadenas de transmisión, - comprobar funcionamiento uniforme de mecanismos dosificadores. 8. Limpieza en general - realizar limpieza detallada de útiles de control, posicionamiento de piezas, bridajes, pasos de transferización, etc., - mantener el entorno de los puestos de trabajo y de las máquinas en perfectas condiciones de orden y limpieza, evitando todo tipo de salpicaduras de refrigerantes y virutas, - conservar en buen estado las protecciones fijas-móviles de tipo fuelle, etc., cambiando o reparando si procede 6.4.4. Mantenimiento legal Dentro de las tareas de mantenimiento, hay un grupo muy especial de éstas que no decide ni el propietario, ni el Jefe de Planta ni los fabricantes de los equipos: son las tareas marcadas por disposiciones legales, que por supuesto, son de obligado cumplimiento. Habitualmente se conoce a este grupo de tareas „mantenimiento legal‟‟. En general, casi todas las obligaciones de mantenimiento están motivadas por la seguridad. Casi todos los trabajos de este tipo pretenden asegurar que los equipos pueden trabajar en condiciones de seguridad apropiadas, de forma que los trabajadores de la instalación, de instalaciones próximas o la población en general puedan verse afectados. Este tipo de obligaciones varían con el tipo de instalación y su tamaño; evolucionan con el tiempo; varían de unos países a otros; e incluso, dentro del mismo país, pueden variar de unas regiones a otras. Establecer pautas fijas y válidas para todas las instalaciones en todos los países, regiones y en todo momento es algo imposible. Por ello, estas recomendaciones e indicaciones deben ser tomadas como una simple guía de referencia, que habrá que comprobar y completar en cada caso. 368 MANTENIMIENTO INDUSTRIAL Equipos sometidos a requerimientos legales de mantenimiento Los equipos que en una planta de industrial están sometidos a mantenimiento legal son habitualmente los siguientes: • Calderas • Tuberías a presión • Aparatos a presión (además de caldera y tuberías a presión) • Aire Acondicionado • Puentes grúa y otros equipos de elevación. • Carretillas elevadoras • Vehículos • Estación de Regulación y Medida de Gas • Planta de GNL • Sistema contra incendios • Red de aire comprimido • Almacenamiento de productos químicos • Contadores de gas • Contadores eléctricos • Torres de refrigeración • Sistemas eléctricos de alta tensión (>1000 voltios) • Sistemas eléctricos de baja tensión (<1000 voltios) Fig. 430.- Caldera, uno de los equipos sometidos a inspecciones reglamentarias 369 MANTENIMIENTO INDUSTRIAL De todas las pruebas e inspecciones que hay que realizar, es necesario conservar a disposición de las autoridades competentes los correspondientes registros documentales de los trabajos efectuados y sus resultados. Las inspecciones reglamentarias pueden efectuarse de cuatro formas, dependiendo de lo que marque la normativa en cada caso: - Inspecciones que puede realizar el propio usuario de la instalación con el personal de mantenimiento propio o habitual de la planta - Inspecciones que puede realizar una empresa con los medios y conocimientos necesarios, pero que no es necesario que esté acreditada, autorizada o inscrita en algún registro - Inspecciones que debe realizar una empresa autorizada específicamente para llevar a cabo este tipo de inspección - Inspecciones que debe realizar un organismo de control autorizado, que es una entidad privada en quien la Administración delega la realización de determinados tipos de trabajo, y que actúa a modo de „notario‟ (dando fe de lo que se expresa en su acta de inspección) Es muy importante para el propietario de la planta, que será el responsable legal de que se lleven a cabo estas inspecciones, y para el contratista de mantenimiento (en caso de que haya asumido la responsabilidad de llevar a cabo éstas de acuerdo a la normativa vigente) cuidar dos aspectos: • Definir todas las obligaciones legales de mantenimiento impuestas por las diferentes normativas de aplicación en la planta • Determinar cómo debe conservar los registros documentales del cumplimiento de dichas obligaciones, y ser cuidadoso con la llevanza de dichos documentos. En unos casos se tratará de tener actualizados unos Libros de Registro, de carácter oficial y debidamente diligenciados por la autoridad competente. Es el caso del Libro de Aparatos a Presión, o del libro de Torres de Refrigeración; en otros casos solo tendrá que mantener clasificados, actualizados y ordenados los documentos generados en los trabajos (actas, informes de inspección, etc.) Hay que tener en cuenta que el incumplimiento de obligaciones legales puede conllevar tres tipos de responsabilidades: - Responsabilidades administrativas, que apercibimientos e incluso el cierre de la actividad pueden suponer sanciones, 370 MANTENIMIENTO INDUSTRIAL - Responsabilidades civiles, si como consecuencia del incumplimiento se producen daños a terceros, al medioambiente, a la administración, etc. - Responsabilidades penales, si se detecta una negligencia grave en el cumplimiento de las obligaciones y se producen además daños personales o medioambientales. NORMATIVAS DE REFERENCIA Como simple referencia, teniendo siempre presente que la normativa cambia con el tiempo, y que a una planta concreta le afecta la normativa supranacional, nacional, regional y local, la tabla 74 contiene una relación de normas de obligado cumplimiento vigentes en España. 371 MANTENIMIENTO INDUSTRIAL Resumen de las principales obligaciones legales de mantenimiento en plantas industriales La siguiente tabla 75 contiene, a modo de resumen, algunas de las principales obligaciones legales referentes a mantenimiento, que emanan de las normas reglamentarias en vigor en el año 2009. Es necesario insistir en que para cada instalación deben comprobarse que las tareas descritas aplican, si existen otras normativas que también deben considerarse y que las normas cambian con el tiempo. 372 MANTENIMIENTO INDUSTRIAL Detalle de las obligaciones legales en determinado equipos e instalaciones 1.- Calderas, tuberías, aparatos a presión y red de aire comprimido En España, el mantenimiento de todos los equipos mencionados los regula el Reglamento de Aparatos a Presión (RAP). Este reglamento establece los equipos a los que aplica y las diferentes inspecciones obligatorias a las que deben someterse. Las calderas de una planta industrial habitualmente están sometidas a inspección reglamentaria. Su obligación o exención lo establece el tamaño de la caldera, y concretamente, el producto de la presión por el volumen (PxV). A partir de determinados valores de PxV hay que hacer una serie de inspecciones, o es de aplicación una normativa u otra. En cuanto a tuberías, es necesario clasificar todas las tuberías a presión de la planta por tipos, para poder determinar las inspecciones a realizar y la frecuencia éstas. 373 MANTENIMIENTO INDUSTRIAL Existen normalmente tres tipos de inspecciones: - Las que realiza el propio usuario o una empresa mantenedora contratada por él, que suelen de carácter anual - Las que se realiza un organismo autorizado acreditado, que suelen tener una periodicidad inferior (cada 3 o 5 años). - Las que se realizan tras una modificación o reparación, que generalmente realiza un organismo autorizado. En las primeras se realizan una serie de verificaciones y comprobaciones por el usuario de la instalación. En las segundas, la empresa acreditada comprueba sobre todo las seguridades de los equipos (correcto tarado de válvulas de seguridad, parada de seguridad por bajo nivel, etc.), y realiza pruebas hidráulicas o neumáticas de presión, para comprobar que la caldera es capaz de soportar las condiciones normales de funcionamiento con cierto margen de seguridad. Sobre las pruebas hidráulicas o hidrostáticas, son pruebas bastante agresivas con la instalación. En general supone elevar la presión de forma continuada durante un cierto periodo de tiempo hasta un 150% de la presión máxima de servicio. Hay que vaciar la caldera, purgarla, rellenarla y presurizarla con el líquido con el que se vaya a hacer la prueba (normalmente agua desmineralizada tratada). Es muy habitual que durante este proceso se produzcan bloqueos de válvulas, roturas de tubos, roturas de soldaduras en calderines y colectores, y fallos en la instrumentación (sobre todo en el elemento sensor). Las normativas suelen prever la posibilidad de realizar pruebas sustitutivas de las agresivas pruebas hidráulicas, aunque hay que solicitarlo, con la argumentación correspondiente, y obtener la autorización para ello. De todas las pruebas realizadas es necesario que exista un registro escrito. En general las instalaciones deben contar con un Libro de Aparatos a Presión, debidamente diligenciado por la autoridad competente. En él se debe anotar el resultado de las inspecciones realizadas por el usuario, las inspecciones periódicas legales, las que resulten de modificaciones o reparaciones y cualquier anomalía que se detecte en la instalación. Este libro puede ser sustituido en determinados casos por un programa informático en el que se registre la misma información. Además de este libro, suele ser obligatorio que exista un libro diario de calderas, en el que se anoten todas las maniobras que se realicen en los equipos a presión. Habitualmente en las plantas existe un libro diario en el que se anotan todas las maniobras e incidencias que se tienen lugar en cada uno de los turnos de trabajo, no sólo de calderas y aparatos a presión sino de todos los equipos. Este libro diario puede sustituir al libro obligatorio de aparatos a presión. 374 MANTENIMIENTO INDUSTRIAL 2.- Estación de regulación y medida de gas (ERM) Las inspecciones de los sistemas de regulación y medida se basan en la vigilancia de determinados parámetros, en el estado de tuberías y equipos, en la comprobación de seguridades, comprobación de la maniobrabilidad de válvulas y la detección de fugas. Dependiendo de la instalación las periodicidades y las tareas pueden cambiar. La compañía suministradora del gas puede realizar determinadas inspecciones y vigila constantemente el cumplimiento de las obligaciones legales, enviando inspectores a la instalación para comprobar el cumplimiento. Las tareas deben ser realizadas por empresas autorizadas y los registros a conservar son las actas de inspección. 3.- Vehículos Dentro de este grupo estarían las carretillas elevadoras y los turismos, furgonetas y vehículos industriales usados en la actividad. Las carretillas elevadoras deben seguir el plan de mantenimiento propuesto por el fabricante. Puede realizarlo el usuario o un taller especializado. Los vehículos utilizados en una instalación industrial están generalmente sujetos a normas comunes a todos los vehículos. En España y en la Unión Europea, deben pasar periódicamente una Inspección Técnica, denominada ITV. En otros países existen organismos e inspecciones equivalentes. 4.- Torres de refrigeración Desde que se detectaron los primeros casos de legionelosis, con graves daños personales (que incluyeron muertes) y pánico en la población, las legislaciones sucesivas han ido endureciendo cada vez más el mantenimiento a que deben estar sometidas las torres de refrigeración. Además del tratamiento químico adecuado, que incluye la aplicación de los biocidas correspondientes, suele ser obligatoria la realización de limpiezas en profundidad de torres y circuitos de refrigeración, mediante la aplicación de biocidas en concentraciones muy superiores a las habituales durante varias horas. También puede incluir la limpieza de los separadores de gotas. La limpieza debe ser realizada por una empresa homologada. El registro es el informe emitido por la empresa, que debe ser registrado en el llamado Libro de Torres. 375 MANTENIMIENTO INDUSTRIAL 5.- Sistemas eléctricos de baja tensión (<1000 voltios) Anualmente, el usuario de la instalación debe revisar, con su propio personal si tienen los conocimientos necesarios o con personal externo, la revisión de todos los equipos y elementos de tensiones inferiores a 1000 voltios. 6.- Alta tensión (>1000 voltios) a) Inspecciones a realizar por el usuario o empresa mantenedora cualificada El usuario debe realizar al menos anualmente una revisión de todos los equipos relacionados con el sistema de alta tensión, y dejar anotado en el Libro de Registro de Alta Tensión el resultado de la inspección. Los puntos que habitualmente se inspeccionan son los siguientes: 1.- Embarrados • Comprobación del estado (posibles fisuras) y limpieza de autoválvulas, pasamuros, aisladores de apoyo y embarrado. • Comprobación de aparellaje, con revisión de todas las celdas. 2.- Aparellaje - Seccionadores • Limpieza • Verificación de aprietes y conexiones • Comprobación de presión y estado de cuadrillas • Observación de posibles fisuras de aisladores • Verificación de la correcta maniobra de conexión-desconexión. - Interruptores automáticos. • Limpieza • Verificación de apriete conexiones • Comprobar presión gas (SF6). • Verificar correcto funcionamiento del ciclo de maniobra • Comprobar funcionamiento de disparo por acción de los relés de protección. • Revisión de mecanismos de mando, principalmente: - Resortes - Timonería y trinquete del sistema de disparo por acción de los relés de protección o del pulsador de desconexión 376 MANTENIMIENTO INDUSTRIAL - Indicadores "conectado" y "desconectado" - Transformadores de salida • Limpieza • Verificación de apriete conexiones • Inspección del estado por su aspecto exterior 3.- Transformadores de potencia • Limpieza general de aisladores, pasatapas, cuba y radiadores. • Verificación apriete conexiones • Observar posibles fisuras de aisladores pasatapas. • Observar posibles fugas de aceite a través de las juntas de los pasatapas, radiadores, cubas o válvulas. • Comprobación del funcionamiento de la instrumentación (termómetro y Bucholz) en el transformador que está equipado de ellos. • Comprobar estado de desecado de silicagel • Comprobar nivel de aceite • Revisión estado general de la pintura • Medición de la rigidez dieléctrica del aceite. 4.- Puesta a tierra • Verificación de conexiones de puesta a tierra de aparellaje, herrajes, cuba de transformador, neutro de transformador, secundarios de transformadores de medida, autoválvulas, etc. • Medidas de resistencia de puesta a tierra 5.- Cuadros auxiliares • Limpieza • Verificación apriete conexiones • Verificación correcta maniobras conexión-desconexión • Verificación correcta maniobrabilidad de aparamenta • Visualización posibles deterioros, quemaduras, etc. 6.- Alumbrado subestación y celdas • Comprobación del estado general de la instalación • Comprobación del funcionamiento de todos los puntos de luz. • Comprobación del funcionamiento de alumbrado de emergencia. 377 MANTENIMIENTO INDUSTRIAL 7.- Medidas de seguridad • Comprobación de la existencia y buen estado de los equipos que reglamentariamente han de disponer los centros de transformación: - Banquetas aislantes - Cerrantes aislantes - Extintores - Placas de peligro - Esquema unifilar de la instalación e instrucciones de maniobra. - Placa de primeros auxilios. b) Inspecciones a realizar por una empresa autorizada Una entidad autorizada que cuente con las correspondientes acreditaciones debe realizar una inspección de la instalación. En general, debe inspeccionar todos los puntos detallados en el apartado anterior. 7.- Instalaciones térmicas en edificios Las instalaciones climatizadoras son objeto de revisiones legales toda vez que se ha detectado en ellas en ocasiones la presencia de microorganismos que pueden ser nocivos para la salud. Las inspecciones son realizadas por una empresa mantenedora autorizada que tenga la acreditación necesaria. En general las tareas consisten en la comprobación de parámetros de funcionamiento (temperaturas y presiones en evaporadores y condensadores, limpiezas, detección de fugas, etc. Para el registro suele ser suficiente con el archivo de los informes de revisión emitidos por una empresa mantenedora especializada en ese tipo de instalaciones. 8.- Puentes grúa y otros equipos de elevación Los puentes grúa y los equipos de elevación son normalmente revisados por una empresa mantenedora, sin que tenga que intervenir un organismo de control independiente. La revisión consiste en la comprobación de las seguridades (finales de carrera, sensores de carga, sistemas de protección eléctrica, dispositivos anticolisión, frenos, 378 MANTENIMIENTO INDUSTRIAL etc.), del estado de los elementos de sustentación (cables, cadenas), de los elementos motrices y de los elementos de guía (ruedas, vías). El registro que debe guardarse es el informe que emite la empresa encargada de la inspección tras la realización de ésta. 9.- Sistema contraincendios Las inspecciones del sistema contraincendios son de dos tipos: las que realiza el usuario y las que realiza una empresa mantenedora que tenga la autorización necesaria. El usuario, con una periodicidad baja (trimestralmente, semestralmente) debe verificar la instalación y el correcto funcionamiento de cada uno de los elementos que la componen. La empresa mantenedora autorizada revisa en profundidad y con una periodicidad generalmente anual cada uno de los elementos que componen el sistema. Estos elementos son los siguientes: - Sistemas de detección y alarma - Extintores - Sistemas de abastecimiento de agua (depósitos y bombas principalmente) - Mangueras, hidrantes y bocas de incendio equipadas - Sistemas de extinción fijos (rociadores, sistemas de CO2, sistemas de polvo o espuma) Como registro es necesario conservar los informes de inspección emitidos por la empresa autorizada. 10.- Equipos de medición de vertidos y emisiones Los controles a realizar en los equipos de vertidos y emisiones suelen estar reflejados en los estudios de impacto ambiental, en la declaración de impacto ambiental y en diversas normativas nacionales, regionales e incluso locales. Suelen referirse a la calibración de estos equipos. Además de una calibración habitual que puede ser realizada por personal habitual de planta, hay que realizar cada cierto tiempo una calibración y comprobación de los equipos de medición supervisada o realizada por un organismo de control. Como registro, será necesario guardar los informes de calibración internos y las actas emitidas por el organismo de control autorizado. 379 MANTENIMIENTO INDUSTRIAL 11.- Almacenamiento de productos químicos Líquidos corrosivos Se trata de verificaciones que puede realizar el propio usuario de la instalación, con carácter generalmente anual. En general se trata de comprobar la estanqueidad del almacenamiento y de los elementos de retención que evitan derrames, de la protección catódica (si existe), de las tuberías y equipos de bombeo que los transportan, y de los venteos que en su caso puedan existir. El registro es el informe de inspección emitido por quien lo haya llevado a cabo. Líquidos inflamables Igual que en el caso anterior, se trata de verificaciones que puede realizar el propio usuario de la instalación, con carácter generalmente anual. En general se trata de igualmente de comprobar la estanqueidad del almacenamiento y de los elementos de retención que evitan derrames, de la protección catódica (si existe), de las tuberías y equipos de bombeo que los transportan, y de los venteos que en su caso puedan existir. Además, hay que verificar especialmente los equipos de lucha contraincendios específicos de esta instalación. El registro es el informe de inspección emitido por quien lo haya llevado a cabo. 12.- Libros de registro En relación al mantenimiento, los libros de registro obligatorios en una planta industrial suelen ser los siguientes: - Libro de aparatos a presión, sustituible por un sistema informático en determinados casos y previa autorización - Diario de calderas, sustituible por el libro de turno de la instalación - Libro de Torres de refrigeración - Libro de emisiones - Libro de sistemas de alta tensión - Libro de almacén de productos químicos 380 MANTENIMIENTO INDUSTRIAL Además de éstos pueden existir otros ajenos al mantenimiento y que también pueden ser de carácter obligatorio (libro de salidas de residuos peligrosos, de aceites usados, libros de registro de entradas-salidas de combustibles, libros de registro de importaciones y exportaciones de electricidad, libro relacionados con el personal, libro de visitas oficiales de la administración, etc.). La tabla 76 contiene una relación de los libros de registro y la documentación acreditativa de la realización de las obligaciones legales de mantenimiento 381 MANTENIMIENTO INDUSTRIAL 6.4.5. Ejemplo de actuaciones y frecuencias recomendadas En estos protocolos genéricos se establecen todas las tareas que, con carácter general, pueden aplicarse a los elementos componentes de cada familia definida, también las frecuencias de intervención que se indican han sido definidas con carácter general, tomando como ejemplo los mínimos establecidos en la IT3 del RITE vigente, para todas las actuaciones que en él se recomienda llevar a la práctica. Además, se deberá considerar, para cada instalación determinada, la pertinencia de aplicación en cada gama preventiva de las tareas que se indican a continuación: • Verificación de la existencia e idoneidad de instrucciones de seguridad adecuadas, situadas en lugar visible. Con frecuencia anual, como mínimo. • Verificación de la idoneidad del programa de gestión energética disponible y actualización o modificación si procede. Con frecuencia anual, como mínimo. • Verificación de la idoneidad de las instrucciones de manejo y maniobra disponibles. Con frecuencia anual, como mínimo. • Verificación de la idoneidad del programa de funcionamiento establecido. Con frecuencia semestral, como mínimo, y preferentemente una vez por temporada. • Adecuación del programa de mantenimiento establecido a los usos y necesidades del edificio, contemplando el régimen de menor consumo energético que pueda conseguirse de cada elemento. Con frecuencia anual, como mínimo. Índice de protocolos genéricos de mantenimiento preventivo Familia 1.- Generadores de calor con combustibles líquidos. Familia 2.- Almacenamiento y trasiego de combustibles líquidos. Familia 3.- Generadores de calor con combustibles gaseosos. Familia 4.- Sistemas de captación solar térmica. Familia 5.- Sistemas de preparación A.C.S. Familia 6.- Plantas enfriadoras de agua por compresión mecánica. Familia 7.- Plantas enfriadoras de agua por ciclo de absorción. Familia 8.- Torres de refrigeración y condensadores evaporativos. 382 MANTENIMIENTO INDUSTRIAL Familia 9.- Equipos autónomos de acondicionamiento de aire. Familia 10.- Sistemas autónomos de caudal de refrigerante variable. Familia 11.- Unidades de tratamiento de aire. Familia 12.- Filtros de aire. Familia 13.- Recuperadores de energía aire-aire. Familia 14.- Equipos para humectación del aire por inyección de vapor. Familia 15.- Equipos de enfriamiento adiabático y humectación por contacto. Familia 16.- Baterías de tratamiento de aire. Familia 17.- Unidades de ventilación y extracción. Familia 18.- Motobombas de circulación. Familia 19.- Conductos para aire, elementos de difusión y accesorios. Familia 20.- Redes hidráulicas, componentes y accesorios. Familia 21.- Intercambiadores de calor agua-agua. Familia 22-1.- Unidades terminales de climatización. Ventiloconvectores y Cortinas de aire. Familia 22-2.- Unidades terminales de climatización. Inductores y Vigas frías. Familia 22-3.- Unidades terminales de climatización. Cajas de expansión. Familia 22-4.- Unidades terminales de climatización. Radiadores y Convectores. Familia 22-5.- Unidades terminales de climatización. Suelos y Techos radiantes. Familia 22-6.- Unidades terminales de climatización. Velas Frías. Familia 23.- Sistemas y equipos de regulación y control. Familia 24.- Cuadros eléctricos y líneas de distribución para climatización. 383 MANTENIMIENTO INDUSTRIAL 384 MANTENIMIENTO INDUSTRIAL 385 MANTENIMIENTO INDUSTRIAL 386 MANTENIMIENTO INDUSTRIAL 387 MANTENIMIENTO INDUSTRIAL 388 MANTENIMIENTO INDUSTRIAL 389 MANTENIMIENTO INDUSTRIAL 390 MANTENIMIENTO INDUSTRIAL 391 MANTENIMIENTO INDUSTRIAL 392 MANTENIMIENTO INDUSTRIAL 393 MANTENIMIENTO INDUSTRIAL 394 MANTENIMIENTO INDUSTRIAL 395 MANTENIMIENTO INDUSTRIAL 396 MANTENIMIENTO INDUSTRIAL 397 MANTENIMIENTO INDUSTRIAL 398 MANTENIMIENTO INDUSTRIAL 399 MANTENIMIENTO INDUSTRIAL 400 MANTENIMIENTO INDUSTRIAL 401 MANTENIMIENTO INDUSTRIAL 402 MANTENIMIENTO INDUSTRIAL 403 MANTENIMIENTO INDUSTRIAL 404 MANTENIMIENTO INDUSTRIAL 405 MANTENIMIENTO INDUSTRIAL 406 MANTENIMIENTO INDUSTRIAL 407 MANTENIMIENTO INDUSTRIAL 408 MANTENIMIENTO INDUSTRIAL 409 MANTENIMIENTO INDUSTRIAL 410 MANTENIMIENTO INDUSTRIAL 411 MANTENIMIENTO INDUSTRIAL 412 MANTENIMIENTO INDUSTRIAL 413 MANTENIMIENTO INDUSTRIAL 414 MANTENIMIENTO INDUSTRIAL 415 MANTENIMIENTO INDUSTRIAL 416 MANTENIMIENTO INDUSTRIAL 417 MANTENIMIENTO INDUSTRIAL 418 MANTENIMIENTO INDUSTRIAL 419 MANTENIMIENTO INDUSTRIAL 420 MANTENIMIENTO INDUSTRIAL 421 MANTENIMIENTO INDUSTRIAL 422 MANTENIMIENTO INDUSTRIAL 423 MANTENIMIENTO INDUSTRIAL 424 MANTENIMIENTO INDUSTRIAL 425 MANTENIMIENTO INDUSTRIAL 426 MANTENIMIENTO INDUSTRIAL 427 MANTENIMIENTO INDUSTRIAL 428 MANTENIMIENTO INDUSTRIAL 7. EJEMPLO DE UN PLAN DE MANTENIMIENTO En este apartado se presenta un modelo de planteamiento de un Plan de Mantenimiento, mediante un ejemplo práctico aplicado a una instalación real, de manera esquemática para no alargar excesivamente este documento. El procedimiento que se sigue en este ejemplo es, lógicamente, el recomendado en todo lo desarrollado anteriormente. EJEMPLO DE EMPRESA Esquema general (organigrama) • Sector metalúrgico. • Producto propio: componente de otros productos. • Proceso: montaje de componentes y subconjuntos que se adquieren mecanizados o semimecanizados. • Plantilla:60 personas de las cuales 5 son comerciales,6 administración,3 gerentes y 46 de producción, de los cuales 3 pertenecen a la dirección de fabricación ,investigación y desarrollo y prototipos 4,calidad y metrología 3,almacenes 4,mantenimiento 2 y producción directa 30. EJEMPLO DE EMPRESA GERENCIA COMERCIAL ADMINISTRACIÓN FABRICACIÓN DIRECCIÓN DE FÁBRICA I+D Y PROTOTIPOS CALIDAD Y METROLOGÍA MANTENIMIENTO PRODUCCIÓN ALMACENES 429 MANTENIMIENTO INDUSTRIAL SECCIONES AUXILIARES Elevación y transporte interior (carretillas, grúas, toros). Aire comprimido (compresores e instalación). Calefacción. Seguridad e higiene. SECCIONES COMPLEMENTARIAS Dirección de fábrica (ordenadores de gestión y producción, mobiliario). I+D y prototipos (mobiliario, informática de diseño, equipos de fabricación de prototipos, calibración y metrología). Almacenes (materias primas, componentes de producción, semielaborados, herramientas y utillaje, consumibles, subproductos, eliminación de residuos, producto final, recambios y mantenimiento. Sección de mantenimiento (equipos de mantenimiento, almacén de recambios, herramienta especial, mobiliario industrial). SECCIONES DE PRODUCCIÓN Sección de tornos (automáticos, revolver y CNC). Sección de fresadoras (verticales, planas y centros de mecanizado). Sección de prensas (+ de 20 tm, - de 20 tm, automáticas y alimentadores). Sección de plegadoras y conformadoras. Sección de electro erosión. Sección de máquinas especiales (transfer, máquinas a medida). Sección de máquinas auxiliares (planear, serrar, taladrar, roscar). Sección de hornos. Líneas de montaje Fac/1-sec/4. Sección de acabado. Sección de embalaje. 430 MANTENIMIENTO INDUSTRIAL Inventario de la sección de fresadoras Características Marca Tipo Codificación Localización Fres.vertical Fes.horizontal Fortuna Heisenberg xxx-2000 HT-25 Fres-fv-2 Fres-fh-5 Fac/1-sec/4 Fac/1-sec/4 Inventario de la sección de aire comprimido Características Marca Tipo Codificación Localización Comp.rotativo40cv Comp.rotativo25cv Worthington Worthington RT 45 VR RT 25 CR AC-001 AC-002 Fac/1-sec/21 Fac/1-sec/21 CRITERIOS FUNDAMENTALES A TENER EN CUENTA AL HACER INVENTARIO 1. Definir claramente los objetivos del inventario. 2. Definir los límites materiales (abarca o no abarca). 3. Definir la información que pretendemos obtener. 4. Definir las personas que lo van a realizar (y a veces supervisar). 5. Dar instrucciones a éstas personas incluso por escrito. 6. Establecer la documentación normalizada para recoger la información. 7. Supervisión de éste trabajo. 8. Escoger el momento más adecuado de acuerdo con los directores de las secciones. 9. Sistemas y criterios de actualización. 10. Informar a todo el personal de lo que se va a hacer. CLASIFICACIÓN DEL EQUIPO E INSTALACIONES 1. Clasificarlos por conjuntos o elementos de similares características, producto o servicio. 2. Por departamentos o secciones. 3. Básicos o complementarios. 4. Principales o de reserva. 5. Críticas o no críticas. 6. Independientes, en cadena, o en proceso continuo. 7. Equipos e instalaciones. 431 MANTENIMIENTO INDUSTRIAL RECURSOS DISPONIBLES (para llevar a cabo el mantenimiento) Activos industriales (muebles, instalaciones, maquinaria, utillaje, herramientas, recambios). Recursos humanos (personal cualificado: técnicos, mandos y director de mantenimiento). Recursos de organización (herramientas para la gestión, ordenadores, equipos, ficheros, programas informáticos). Recursos externos (antigüedad de la herramienta, histórico de incidencias, estado, amortización). Codificación. Localización física o geográfica. Unidades solicitadas a los proveedores. ANÁLISIS DE LOS RECURSOS HUMANOS Formación. - Interés por su actualización y reciclaje. Capacidad de aprendizaje. Nivel que tiene. Edad. - Clasificación por tramos de edades. Coste (sueldo). - Por individuo. Por secciones. Grado de identificación con los objetivos de la empresa. Categoría profesional actual. Adecuación al puesto de trabajo. 432 MANTENIMIENTO INDUSTRIAL RECURSOS DE ORGANIZACIÓN Elementos de tratamiento de información con su nivel de informatización. Nivel del sistema actual de información. Cantidad de datos en los ficheros. Fiabilidad de los datos. Fiabilidad de la recogida de datos. Sistemas de costes del mantenimiento. RECURSOS EXTERNOS (COLABORACIONES) Talleres. Ingeniería. Personal cualificado. CLASIFICACIÓN POR SU CAPACIDAD - Realizar cualquier tipo de trabajo de larga duración. Realizar cualquier tipo de trabajo de corta duración. Especializadas en realizar trabajos mecánicos en general. Especializadas en electricidad. Altamente especializadas en trabajos mecánicos. CLASIFICACIÓN POR LA FORMA DE FACTURAR - Empresas que facturan por presupuesto. Empresas que facturan por trabajo, por administración (sin presupuesto, por las horas que dure). Empresas que facturan por tiempo contratado, independiente de las intervenciones. 433 MANTENIMIENTO INDUSTRIAL PASOS PARA DISEÑAR UNA BASE DE DATOS 1. 2. 3. 4. 5. 6. 7. 8. Determinar la finalidad de la base de datos. Determinar las tablas. Determinar los campos. Identificar los campos con valores exclusivos. Relacionar las tablas. Precisar el diseño. Agregar datos y crear otros objetos de la base de datos Análisis de Microsoft Access. Una tabla no puede tener información duplicada ni duplicarse entre las tablas. Cada tabla va sobre un asunto, aunque pueden subdividirse. En cada tabla abrimos los campos, que van de temas individuales pero del asunto de la tabla. Cada campo está relacionado directamente con el asunto de la tabla. No hay que incluir datos derivados o calculados (sumas, restas, si, no,). Asegurarse de que ha quedado reflejada toda la información que se necesita. Crear campos con partes lo más pequeñas posible, es preferible crear un campo para el nombre y otro para los apellidos que uno solo para el nombre completo. Los campos que no se usan no se ponen; no inflar por inflar. Un campo se llamará clave principal y ahora se le dice al programa como relacionar las tablas. INTRODUCCIÓN DE DATOS Ir registro por registro rellenando los campos que hemos preparado. Después iremos a la creación de consultas, formularios, informes, macros y módulos. Hay herramientas para hacer éstas bases y siempre está el ayudante para echar una mano. Hay una tabla hecha por defecto que se llama Neptuno y la presenta como ejemplo. DOSIER TÉCNICO DE UN ACTIVO Es la recopilación de toda la información de ése activo. Se va a dividir en tres subdosieres: de utilización, de mantenimiento y de aprovisionamiento. Nos vamos a centrar en el de mantenimiento. 434 MANTENIMIENTO INDUSTRIAL 1. Filiación del activo a escoger, características técnicas necesarias para escoger y definir el material. 2. Ficha técnica donde aparecen informaciones técnicas necesarias para la presentación y puesta en marcha. 3. Esquema general de principio. 4. Planos de conjunto, generales, cargas, espacios de pasillo, condiciones de accesibilidad para intervenciones de mantenimiento. 5. Esquemas funcionales y otros esquemas, elementos funcionales que nos indican su constitución y funcionamiento. 6. Instrucciones de instalación, transporte y almacenaje, planos de instalación, mantenimiento y desembalaje, 1ª puesta en marcha, puesta en conservación y estocaje, proceso de instalación. 7. Instrucciones de instalación, descripción del funcionamiento, reglajes corrientes, operaciones de mantenimiento de primer nivel y servidumbres del entono al activo. 8. Instrucciones generales de actuación, descripción y funcionamiento en condiciones normales, particulares, en fallos de funcionamiento, reparto en niveles, herramientas y equipos, formas de intervención, fichas de montaje y desmontaje, controles, ensayos, acondicionamiento, destrucción de material, lista de reparadores. Actuación de listado; listado de piezas, forma de presentación, método usado para la descomposición, identificación de los elementos en cascada, vista de conjunto y planos de subconjunto, números de referencia o marcaje, casos particulares, generalidades, forma de clasificación, elementos que deben figurar, tablas de correspondencia, repertorio de números de normas, identificación de páginas y puesta al día del listado. 9. Instrucciones para la modificación que se hayan previsto. 10. Cuestionario tipo para solicitudes de oferta de activos. 11. Historial del activo. Fases para la confección del dossier de mantenimiento: 1. División del activo en grupos y subgrupos 2. Estructuración del dossier de planes de fabricación, completado por planes de utilización y montaje, teniendo como objetivo el desgloso del dossier 3. División de grupos y subgrupos según la explotación 4. Numeración de las piezas en plano según el desmontaje - Recopilar la información existente, planos, volumen de producción, textos de referencia, normas documentos sustitutivos, revistas, libros, comentarios o artículos referidos al activo. 435 MANTENIMIENTO INDUSTRIAL - Presentación del equipo, examinar un prototipo del fabricado, visitar lugares de fabricación, recibir explicaciones, análisis de los documentos recopilados para definir con precisión el activo, verificar si los textos recogidos están completos. - Textos complementarios, hacer anteproyecto con desmontaje- remontaje. Abrir una hoja por cada capítulo, hacer un listado completo de todas las utilizaciones posibles y descomponer cada utilización en operaciones elementales. 5. Buscar respuesta a toda las incógnitas mediante entrevistas, preguntando lo mismo a varias personas, hacer preguntas ingenuas que escondan otras preguntas más en profundidad, hacer preguntas provocadoras para lograr la respuesta más clara. 6. Montar el proyecto completo. Recoger todas las informaciones, clasificarlas y ordenarlas, ordenar en capítulos, definir qué dibujos necesitamos, comprimir o ampliar el volumen. 7. Hacer verificar el proyecto y provocar críticas para recogerlas por escrito. 8. Rectificar textos, revisar dibujos e ilustraciones, poner fecha, referencia de cada elemento. 9. Preocuparse de la difusión y entenderse con servicios posventa 10. Asesorías e ingenierías 11. Hacer la documentación FASE DE TOMA DE DECISIONES - Decisiones previas Realización de ficha de mantenimiento de cada activo Planificación de las intervenciones. Las decisiones se toman desde el punto de vista general de la empresa, para cada activo en particular y en general, para cada recurso. Dentro de las decisiones previas están: 1. 2. 3. 4. 5. Horas mínimas de funcionamiento correcto Número máximo de averías Tiempo máximo de paradas Volumen de producción Calidad de producción 436 MANTENIMIENTO INDUSTRIAL Preparación de la ficha de mantenimiento, factores a tener en cuenta para el mantenimiento de los activos: - Antigüedad del equipo Complejidad de función Coste de la inversión Complejidad de mantenimiento Establecer políticas sobre los recursos que tenemos (cada cuanto se cambia, se...) Medios técnicos y stock necesario La realización de la ficha de mantenimiento de cada equipo: es un extracto del dossier de mantenimiento y contiene todos los datos necesarios para las órdenes de mantenimiento. Datos mínimos para hacer la ficha de mantenimiento del activo: - Datos fijos Edad Nombre y especificación del activo Marca Proveedor Tipo Codificación Clasificación del activo Relación con otros activos Nivel de criticidad(riesgo en el paro) Situación del activo Datos técnicos Datos técnicos de mantenimiento Tipo de mantenimiento a aplicar Relación de actuaciones previstas Relación de órdenes de trabajo tipo para diferentes situaciones Histórico de mantenimiento según tipología, fecha, necesidades, paros Denominación habitual del equipo: Equipo Nº : Denominación: Marca: Tipo: Nº fabricación: Asignada al departamento Asignada centro de coste Asignada a la línea Asignada a la célula Localización 437 MANTENIMIENTO INDUSTRIAL Fabricante: Fecha adquisición: Fecha recepción: Fecha instalación: Puesta en marcha: Asignada a la factoría Pérdidas Peso Color Potencia total Tipo de activo Grado Ultima fecha valoración Valor anterior Mtmto. Básico o com. Crítico o no Principal/Res. Contaminante Tipo de activo Grado Ultima fecha valoración Valor anterior Mtnmto. Básico o com. Crítico o no Principal/Res. Contaminante Componentes del equipo: Cantidad Denominación Marca Tipo Fabricante Datos técnicos Consumibles precisos: Cantidad Ud. Denominación Marca Tipo Fabricante Datos técnicos Conexiones precisas: Cantidad Denominación Tipo Datos técnicos Baja tensión Aire comprimido Alta tensión Agua Vapor Mejoras introducidas: Fecha Descripción de la mejora Proveedores OT de la mejora 438 MANTENIMIENTO INDUSTRIAL Lo que aparece es informaciones precisas, órdenes de realización precisas, indicación de los recursos precisos y después de realizada la intervención aparecerá un informe técnico, informe de realización, consumos (recambios) y finalmente incidencias. Nº OT: Descripción de tareas Fecha Fecha Firma Operario Horas Departamento Las fichas de histórico van referidas a: Intervenciones precisas de mantenimiento previstas y programadas. Intervenciones referidas a sus componentes. Históricos de diferentes intervenciones. Costes históricos de las mejoras. Tipos de fichas de recursos: - Fichas de equipo Fichas de recambios Fichas de componentes Fichas de materiales - Fichas de consumibles - Fichas de personal - Fichas de recursos - Ficha de herramientas Dentro de las fichas de equipos podemos incluir antigüedad, estado, información técnica, histórico de incidencias, coste de su mantenimiento, amortización. Dentro de las fichas de herramientas se incluyen los anteriores. Dentro de la ficha de materiales lo mismo. Dentro de la ficha de personal se pone el cargo, mentalización, 439 MANTENIMIENTO INDUSTRIAL formación, adecuación y coste. Dentro de la ficha de colaboradores externos se pone lo mismo. Valoración general: ratios históricos. - Coste-empleo-calidad Stock intermedios Disfuncionalidad Actuaciones de mantenimiento preventivo y predictivo Se trata de diseñar un plan de mantenimiento basándonos en las fichas anteriores y aparecerán tiempos, actuaciones, personal, herramientas, materiales,... Como objetivos concretos se pueden resumir en cuatro: 1. Realizar las actividades previstas 2. Rentabilizar al máximo los recursos disponibles y a ser posible no hacer nuevas inversiones. 3. Establecer cargas de trabajo razonables y estables 4. Interferir lo mínimo posible en la actividad productiva Actuación o ejecución: pasos - Definición y tipología de las órdenes de trabajo Planificación y programación de las órdenes de trabajo Lanzamiento de las órdenes de trabajo Ejecución Seguimiento y cierre de las órdenes de trabajo En la orden de trabajo aparece lo que hay que hacer. Las órdenes de trabajo son documentos que acompañan la realización de la intervención y que reúnen todas las intervenciones y órdenes necesarias para la cumplimentación correcta y recogiendo además incidencias, tiempos, consumos y advertencias de la propia intervención. 440 MANTENIMIENTO INDUSTRIAL TIPOS DE ÓRDENES DE TRABAJO - De mantenimiento correctivo: se producen a raíz de un paro no previsto y se refieren al mantenimiento correctivo. De mantenimiento preventivo: se refiere a intervenciones programadas. Condicional (predictivo): en función del estado real de los equipos. Otros que van referidos a trabajos especiales. Planificación y programación de las OT Se puede establecer un esquema de los procesos de planificación. Planning o estado previo: Toma de decisión de la necesidad de la planificación. Análisis del trabajo necesario. Aproximación a los siguientes aspectos: 1. 2. 3. 4. 5. Periodicidad del trabajo Resultado Futuros planes para el equipo Necesidad de modificar, reparar, o reemplazar el equipo Hacer esquemas Consideraciones especiales, necesidades y condicionantes Necesidades de ingeniería Subcontratación de servicios Quién debe realizarlo o coordinarlo Identificación del trabajo a realizar por el departamento de mantenimiento Necesidades de información Instrucciones precisas 441 MANTENIMIENTO INDUSTRIAL Necesidades de mantenimiento Necesidades de horas requeridas Herramientas o licencias especiales precisas Identificar materiales precisos Determinar si esos materiales están en stock En caso de ausencia o rotura de stock se hace pedido, cambiar el status de OT para dar tiempo a la llegada del recambio, e incluso gravarla en la OT la Materiales y recambios recibidos Los materiales y recambios ya están almacenados Identificación del supervisor La OT ya está a punto Cambio de estado Entregarla al supervisor para el programa semanal PLANING O PLANIFICACIÓN DE LAS OT Conjunto de las órdenes de trabajo de mantenimiento en curso y aquellas que están en proceso de lanzamiento. Cuestiones a tener en cuenta: Comprobar que las comunicaciones sean claras y adecuadas para todo el personal Si el tiempo es el adecuado Transmisión del plan en términos claros y comprensibles El objetivo fundamental del plan de mantenimiento es eliminar la causa que produjo la avería, no la reparación en sí. 442 MANTENIMIENTO INDUSTRIAL BIBLIOGRAFÍA. 1.- “Equipment Volume, Handbook and Pmduct Directory,” Ameritan Soc. of Heating, Refrigeration, and Air-Conditioning Engineers, New t‟ork, 1975. 2.- “Industrial Ventilation Guide,” 14th ed., Confetxnce of Govcmment Industrial Hygienists, Lansing, Michigan. 3.- Air Conditioning & Refrigeration Institute (ARI). Air Conditioning SystemsPrinciples, Equipment and Services. ISBN: 0-13-517921-1. 4.- Air Conditioning & Refrigeration Institute (ARI). Manual de Refrigeración y Aire Acondicionado. ISBN: 968-880-051-1. Capítulos 20 al 25. 5.- Air Conditioning & Refrigeration Institute (ARI). Refrigeration and Air Conditioning. 4th Edition. ISBN: 0-13-323775-3. 6.- American National Standard. (1992) ANSI/ISA.S5.1-1984 (R1992). INSTRUMENTATION SYMBOLS AND IDENTIFICATION. 7.- Apuntes Seminario Planeación y Mantenimiento, Escuela Politécnica Nacional, Ecuador, 2004 8.- Artículos Técnicos y minicursos de la revista ISATECH de la ISA. 9.- ASHRAE - Applications Handbook (Capítulo 38). 2003. 10.- ASHRAE - Guideline 4. Preparation of Operating and Maintenance Documentation for Building Systems. 1993. 11.- Automatic Process Control, Carlos A. Smith, Ph.D , Chemical Engineering Department University of South Florida. 12.- Balje, O., Turbomachines, Wiley, 1981 13.- Biblioteca del Ingeniero Químico (Tomo 2). Robert H. Perry, Ed. Mc GrawHill 14.- Bombas Hidráulicas. Prof. Ing. C. Sanabria, UNA. 15.- BOMBAS su selección y aplicación, Continental S.A. T. G. Hicks Compañía editorial 16.- Bombas. Su Selección y Aplicación. Tyler G. Hicks, BME, Compañía Editorial Continental S.A. 443 MANTENIMIENTO INDUSTRIAL 17.- Centrifugal and Axial flow punps, Stepanoff 18.- CEPIS, Operación y mantenimiento de plantas de tratamiento de agua. Lima 2002. 19.- Church, E., Turbinas de Vapor, Alsina, 1955, P5375 20.- Compresores. Selección, Uso y Mantenimientos. Richard W. Greene, Cuerpo de redactors Chemical Engineering Magazine. Ed. Mc Graw-Hill 21.- Considine. D. M., Ross, S. D. (1971). MANUAL INSTRUMENTACIÓN APLICADA. Editorial Continental, S. A. México. DE 22.- Creus A. (1989). INSTRUMENTACIÓN INDUSTRIAL. Editorial Alfa Omega, S. A. México. 23.- Canady, G., Theory of Turbomachines, McGraw Hill, 1964, P13874 24.- D. Kern, Procesos de Transferencia de Calor, ( 1º edición, México, Compañía editorial Continental, 1975), pp 654 25.- DE PARRES, J. L., Máquinas Hidráulicas, México, 1966. 26.- Documentación de mantenimiento Central Hidroeléctrica Abanico, Ecuador, 2007. 27.- Doebelin, E. O. (1980). DISEÑO Y APLICACIÓN DE SISTEMAS DE MEDICIÓN. Editorial Diana. México. 28.- Dr. Ing. E. Brizuela, Turbomáquinas. UBA 2010 29.- Dr. Sakurai, Mantenimiento de Equipos. (CEPIS) 30.- E. Carnicer y C. Mainer, Bombas Centrífugas. Ed. Paraninfo (2004) 31.- E. Orlando, Mantenimiento Industrial. Ecuador 2008. 32.- Enciclopedia de Química Industrial (Tomos 3, 8, 13, y 15). Winnacker – Wengarhner 33.- Federación de Asociaciones de Mantenedores de Instalaciones de Calor y Frío (AMICYF). Conocimientos y experiencias sobre Mantenimiento de Climatización, Calefacción y ACS. ISBN: 84-920511-4-0). 34.- Felder, R. M., Rousseau, R. W. (1991). PRINCIPIOS ELEMENTALES DE LOS PROCESOS QUÍMICOS. Editorial Addison Wesley Iberoamericana. USA. 444 MANTENIMIENTO INDUSTRIAL 35.- G. J. Van Wylen & R. Sonntag , Fundamentos de Termodinámica, (19º edición, México, editorial Limusa , 1995), pp. 461 36.- Gannio, P., Apuntes de Turbomáquinas, Centro de Estudiantes, FIUBA 37.- GARRIDO, Santiago García, Organización y gestión integral de mantenimiento, España, Ed. Díaz de Santos, 2003 38.- IDEA, Guía técnica de mantenimiento de instalaciones térmicas. Madrid2007. 39.- Industrial Process Control Design and Applications, Armando B. Corripio, Ph.D, Louisiana State University. 40.- Ingeniería Química. Brown, Ed. Marín 41.- Instrumentation Installation Project Management System, J.M. Bacon ISA International Society for Measurement and Control. 42.- Kenneth J., Bombas "Selección, uso y mantenimiento". Ed. McGRAWHILL. 43.- Kermode, F., Mechanics of flight, Pitman, 1977 44.- Lezana, E. “Curso Superior de mantenimiento industrial (1997). 45.- Los elementos de control llamados válvulas, Tecnología del agua. Dr. M.A. Soler Manuel 46.- Lucini, M., Turbomáquinas de Vapor y de Gas, Dossat, 1972, P18160 47.- Luyben, W. L. (1990). PROCESS MODELING, SIMULATION AND CONTROL FOR CHEMICAL ENGINEERS. McGraw-Hill. USA. 48.- M. A. Rodriguez, Constitución de las Máquinas Eléctricas. UC 2010 49.- Mallol, E., Turbinas de Combustion, Hachette, 1947, P19731 50.- Manual de Mantenimiento Preventivo Planificado (MPP), 3ª Edición-1999. 51.- Manual HES, Operación y Mantenimiento Hidroabanico, Sipetrol, 2008 52.- Martinez de Vedia, R., Teoría de los motores térmicos, Vol III, Alsina, 1983 53.- MATAIX, C., Turbomáquinas Hidráulicas, Editorial ICAI, 1974. 445 MANTENIMIENTO INDUSTRIAL 54.- Mattaix, C., Turbomáquinas Térmicas, Dossat, P22923 55.- Mendoza, W. J. (1999). DISEÑO DE LA AUTOMATIZACIÓN EN LAS ESTACIONES DE DESCARGA DE LOS CAMPOS DE LEONA Y ORITUPANO. Tesis de grado. UDO. 56.- Micro Motion Power CD (2000). Catálogo y tutor para selección de instrumentos marca Fisher-Rosemount. 57.- Microsoft Encarta 2002 58.- Microsoft Encarta 2003 59.- Monografías.com 60.- MONTECELOS TRASHORRAS, Jesús, Desarrollo de instalaciones electrotécnicas en los edificios, España, Ed. Thomson Learning Ibero, 2006. 61.- Mufarrege, C. Bombas Hidráulicas. FCQI - 2006. 62.- P. Fernandez, Bombas Centrífugas y Volumétricas. UC 2003. 63.- P. Fernandez, Compresores y Turbinas. UC 2003. 64.- Pallás A. R. (1987). TRANSDUCTORES Y ACONDICIONADORES DE SEÑAL. Editorial Marcombo Boixareu. España. 65.- Perry, R. H. and Green, D. W.; Perry‟s Chemical Engineer‟s Hanbook, McGraw Hill, 1998 66.- Polo Encinas, M., Turbomáquinas Hidráulicas, Limusa, 1976, P19016 67.- PRANDO, Raúl, Manual Gestión de Mantenimiento, Uruguay, Ed. Piedra Santa, 1996 68.- Process Industrial Instruments and Controls Hardbook, Douglas M. Considine, P.E, McGraw-hill, INC. 69.- R. Fox & A. McDonald, Introducción a la Mecánica de Fluidos, (4º edición, México, Mc Graw Hill, 1995), pp. 327, 328 y 632. 70.- R. W. Greene, Compresores "Selección, uso y mantenimiento". CUCEI, Ed. Mc Graw-Hill 71.- R. W. Greene, Válvulas "Selección, uso y mantenimiento". CUCEI, Ed. Mc Graw-Hill 446 MANTENIMIENTO INDUSTRIAL 72.- Resumen conferencia modelo gerencial de mantenimiento- Fundamento filosófico, Monterrey, Junio 5al 9 2006. 73.- Rosemount. (1996). COMPREHENSIVE PRODUCT CATALOG. 74.- S. Garcia, Outsourcing de Mantenimiento. Edt. Renovetec 2009. 75.- Sulzer Centrifugal Punp Handbook Switzerland, Elsevier Applied Science Sulzer Brothers. Ltd, Winterthur, 76.- T. Calvo y F. Galdón, Curso de Mantenedor de Calefacción Climatización y A.C.S..- 4ª Edición (2007) 77.- Tecnología Química. L.A. Rubio Felipe, Ed. Tecnos S.A. 78.- Tuberías Industriales, D. N. W. Kentish. URMO S.A. ediciones 79.- Turbomáquinas hidráulicas. Claudio Mataix, Ed. ICAI 80.- VIEJO ZUBICARAY, M., ALONSO, P., Energía Hidroeléctrica, Editorial. Limusa, 1977. 81.- Vivier, L., Turbinas de Vapor y de Gas, URMO, 1975, P17940 1.- http:/ / fly. hiwaay. net/ ~palmer/ motor_sp. html 2.- http:/ / robots-argentina. com. ar/ MotorCC_ControlAncho. htm 3.- http:/ / robots-argentina. com. ar/ MotorCC_PuenteH. htm 4.- www. grc. nasa. gov/ WWW/ K-12/ airplane/ aturbj. html 5.- www.Caballano.com 6.- www.fenk.com.ar 7.- www.infomecanica.com\automatismos.htm 8.- www.monografias.com 447