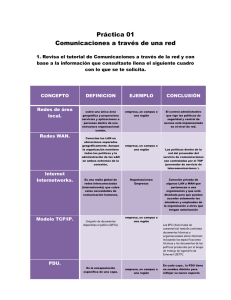
Universidad de Los Andes Facultad de Ingeniería Escuela de Ingeniería de Sistemas Departamento de Sistemas de Control Automatización I INFORME UNIDAD IV Autor: David Aguilar C.I. 26.784.760 Agosto 2021 1 Índice de contenido Página 1 Redes Analógicas y Redes Digitales 3 2 Modelo ISO-OSI 3 2.1 Descripción del modelo 3 2.2 Funciones de las capas 4 2.2.1 Capa física 4 2.2.2 Capa de enlace de datos 4 2.2.3 Capa de red 4 2.2.4 Capa de transporte 5 2.2.5 Capa de sesión 5 2.2.6 Capa de presentación 5 2.2.7 Capa de aplicación 6 3 Estándares de Redes de Comunicación Industrial 6 3.1 FieldBus 6 3.2 ProfiBus 6 3.2.1 PROFIBUS-DP 7 3.2.2 PROFIBUS-PA 8 3.2.3 PROFIBUS-FMS 8 3.3 HART 9 3.3.1 Beneficios del protocolo de comunicación HART 9 3.3.2 Deficiencias del protocolo de comunicación HART 10 3.4 MINIMAP 10 3.4.1 Características 10 3.4.2 Ventajas 10 3.4.3 Desventajas 11 3.5 Modelo TCP / IP 11 3.5.1 Funciones de las capas TCP / IP 11 3.5.1.1 Capa de acceso a la red 11 3.5.1.2 Capa de Internet 11 3.5.1.3 Capa de transporte 11 3.5.1.4 Capa de aplicación 11 4 11 Conclusiones 2 Redes Analógicas y Redes Digitales Analógico y digital son dos métodos de transporte y almacenamiento de datos. Lo analógico nació con la aparición de la electricidad, mientras que lo digital apareció más recientemente con la era de las computadoras. El principio de analógico es reproducir la señal a grabar de una forma similar en un medio. Por ejemplo, cuando una señal de audio se graba en un sistema analógico, la señal presente en la banda seguirá las mismas amplitudes que la onda sonora. Así pues, las variaciones de presión características de una onda sonora se traducirán en variaciones de una señal eléctrica. De este modo, la amplitud eléctrica de la señal analógica será la imagen más o menos fiel de la señal a grabar. En digital, la señal analógica que se va a grabar se convierte en digital mediante un convertidor de analógico a digital. Tras esta conversión la señal no es más que una serie de "0" y "1", es decir una señal con dos amplitudes en lugar de infinitas en analógico. Una vez en esta forma la señal se puede copiar y transmitir sin pérdidas porque en lugar de transportar una señal cuya amplitud debe variar fielmente a la original transporta una señal formada por solo dos amplitudes (por ejemplo 0 = 0voltios y 1 = 5voltios). Modelo ISO-OSI El modelo OSI (Open Systems Interconnection) define cómo deben proceder las computadoras y los dispositivos en red para comunicarse: ● Especifica el comportamiento de un llamado sistema abierto; ● Las reglas de comunicación constituyen los protocolos estandarizados; ● El modelo OSI está estandarizado por ISO. Descripción del modelo El modelo OSI, creado en la década de 1980, se divide en 7 partes llamadas capas y sigue los siguientes preceptos: ● Cada capa es responsable de uno de los aspectos de la comunicación; ● Una capa de nivel N se comunica con las capas N + 1 y N -1 a través de una interfaz; ● Una capa inferior transporta datos de la capa superior sin conocer el significado; ● Las N capas de 2 sistemas se comunican mediante protocolos de comunicación comunes. Las capas se distribuyen de acuerdo con los siguientes usos: ● Las capas 1 a 3 están orientadas a la transmisión; ● La capa 4 es una capa intermedia; ● Las capas 5 a 7 están orientadas al procesamiento, implementadas independientemente de todo el sistema. 3 Esta organización facilita la evolución del software de red (Cliente / Servidor), al ocultar las características internas de la capa, beneficiándose de la descripción de interfaces y protocolos. Funciones de las capas Capa física La capa física es responsable de transmitir bits sin procesar a través de un canal de comunicación. Uno de los objetivos de diseño en este nivel es asegurar que un bit a 1 enviado en un extremo también vaya a 1 en el otro lado, y no a 0. Las preguntas que nos hacemos generalmente son sobre el número. Voltios que se deben suministrar para representar un 1 y un 0, el número de nanosegundos que debe durar un bit, la capacidad de transmitir en ambas direcciones al mismo tiempo, el establecimiento inicial de una conexión y su liberación cuando ambos extremos han terminado, o nuevamente el número de pines de un conector y su función. Los problemas de diseño se refieren principalmente a las interfaces mecánicas y eléctricas y la sincronización, así como al medio de transmisión física que se encuentra debajo de la capa física. Capa de enlace de datos La función principal de la capa de enlace de datos es hacer que un medio de comunicación sin procesar parezca a la capa de red como un enlace libre de errores de transmisión. Para hacer esto, descompone los datos en el transmisor en tramas de datos (generalmente unos cientos o miles de bytes) y envía las tramas en secuencia. Si se trata de un servicio confiable, el receptor confirma la recepción exitosa de cada trama enviando al transmisor una trama de acuse de recibo. Otro punto importante a abordar en esta capa, pero también en la mayoría de las capas superiores, es cómo evitar que un receptor lento sea abrumado con datos de un transmisor rápido. A menudo es necesario utilizar mecanismos reguladores para que el transmisor sepa en todo momento cuánto espacio está disponible en el búfer del receptor. Con frecuencia, las funciones de control de flujo y gestión de errores están integradas. Capa de red La capa de red controla el funcionamiento de la subred. Una parte esencial de su diseño es determinar cómo se enrutan los paquetes desde el origen al destino. Las rutas se pueden elegir por medio de tablas estáticas que están conectadas a la red y rara vez se cambian. También se pueden determinar al comienzo de cada conversación, por ejemplo, al conectarse desde un terminal (por ejemplo, al iniciar sesión en una máquina remota). También pueden ser muy dinámicos y configurarse cada vez para que cada paquete tenga en cuenta la carga actual de la red. 4 Si hay demasiados paquetes al mismo tiempo en la subred, se producirá una congestión. Depende de la capa de red regular este tipo de ralentización y, de manera más general, la calidad del servicio (retrasos, tiempos de tránsito, fluctuaciones, etc.). De este modo, pueden surgir muchos problemas: la técnica de direccionamiento en la segunda red puede ser diferente al de la primera red, el paquete también puede ser rechazado si es demasiado grande, también es posible que los protocolos sean diferentes, etc. La red debe lidiar con todos estos problemas para que las redes heterogéneas puedan interconectarse. Capa de transporte La función básica de la capa de transporte es aceptar datos de la capa superior, dividirlos en unidades más pequeñas si es necesario, pasarlos a la capa de red y asegurarse de que lleguen correctamente a la capa de red. Además, todo esto debe hacerse de manera eficiente manteniendo las capas superiores alejadas de los inevitables cambios de hardware debido a los avances tecnológicos. La capa de transporte también determina el tipo de servicio que se proporcionará a la capa de sesión y, en última instancia, a los usuarios de la red. El tipo de conexión de transporte más exitoso es el canal punto a punto sin errores, que restablece los mensajes o bytes en el orden en que se enviaron. Existen otros tipos de servicios de transporte, como la entrega de mensajes aislados sin garantía del orden de llegada, o la difusión de mensajes a varios destinatarios. El tipo de servicio que se proporcionará se determina cuando se establece la conexión. La capa de transporte ofrece un verdadero servicio de extremo a extremo, de origen a destino. En otras palabras, un programa en la máquina de origen tiene una conversación con un programa similar en la máquina de destino, utilizando encabezados de mensaje y mensajes de control. En las capas inferiores, los protocolos se intercambian entre cada máquina y sus vecinos inmediatos, y no entre las máquinas de origen y destino que pueden estar separadas por muchos enrutadores. Capa de sesión La capa de sesión permite a los usuarios de diferentes máquinas establecer sesiones. Una sesión ofrece varios servicios, entre los que se encuentran la gestión del diálogo (seguimiento de la ronda de transmisión), la gestión de tokens (evitando que dos participantes intenten la misma operación crítica al mismo tiempo) y la sincronización (gestión de puntos de control que permite que las transmisiones largas se recojan donde dejada después de una interrupción). Capa de presentación A diferencia de las capas inferiores que se ocupan principalmente del movimiento de bits, la capa de presentación se ocupa de la sintaxis y semántica de la información transmitida. Para permitir la comunicación entre ordenadores que trabajan con diferentes representaciones de datos, las estructuras de datos intercambiadas pueden definirse de forma abstracta y asociarse con un sistema de codificación estándar utilizado "sobre la marcha". 5 Es la capa de presentación la que gestiona estas estructuras de datos y permite la definición e intercambio de estructuras de nivel superior (por ejemplo, registros bancarios). Capa de aplicación La capa de aplicaciones contiene una variedad de protocolos que son útiles para los usuarios. HTTP (Protocolo de transferencia de hipertexto), que forma la base de la World Wide Web, es un protocolo de aplicación ampliamente utilizado. Cuando un navegador necesita mostrar una página web, transmite el nombre de la página al servidor mediante el protocolo HTTP. El servidor envía la página como respuesta. Se utilizan otros protocolos de aplicación para la transferencia de archivos, el correo electrónico y las noticias. Estándares de Redes de Comunicación Industrial FieldBus Un FieldBus es un sistema de bus en serie que se utiliza en máquinas y sistemas para conectar sensores y actuadores (motores) entre sí y a uno o varios maestros (PC industriales, PLC). Los buses de campo permiten intercambiar datos entre diferentes componentes del sistema a largas distancias y bajo una gran carga externa. Operan en modo maestro-esclavo: mientras que el maestro es responsable de controlar los procesos, el esclavo maneja subtareas individuales. Los FieldBus se diferencian en la "capa física" que utilizan, es decir, el nivel de hardware (por ejemplo, CAN, RS485, Ethernet) y en el nivel de protocolo que define la forma de la información intercambiada. Hay buses de campo, como CANopen y DeviceNet, que usan el mismo medio físico (CAN) pero operan con diferentes protocolos. Del mismo modo, existen protocolos que se pueden implementar en dos tipos diferentes de hardware (por ejemplo, Modbus en RS232 y como Modbus / TCP en Ethernet). ProfiBus La base para el desarrollo de este protocolo fue un proyecto de investigación de varias empresas y cinco institutos de investigación alemanes. Actualmente, Profibus en sus 3 versiones FMS, DP y PA son estándar europeo EN50170 desde 1996, aunque sus actividades comenzaron alrededor de 1987. Existen más de dos millones de dispositivos Profibus instalados, con aproximadamente 250 fabricantes de productos Profibus en todo el mundo. Son dos las asociaciones principales que organizan las actividades encaminadas a la mejora de este bus: PI (Profibus Internacional) y PNO (Organización de usuarios de Profibus). Profibus especifica las características técnicas y funcionales de un sistema basado en un bus de campo en el que controladores digitales descentralizados pueden ser conectados entre sí desde el nivel de campo al nivel de control. Se distinguen dos tipos de dispositivos: Dispositivos maestros: Que determinan la comunicación de datos sobre el bus. Un maestro puede enviar mensajes sin una petición externa cuando posee el control de acceso 6 al bus (el testigo). Los maestros también se denominan estaciones activas en el protocolo Profibus. Dispositivos esclavos: Que son dispositivos periféricos. Los esclavos son normalmente dispositivos de E/S, válvulas, actuadores y transmisores de señal que no tienen el control de acceso al bus y sólo pueden recibir o enviar mensajes al maestro cuando son autorizados para ello. Los esclavos también son denominados estaciones pasivas, por lo que sólo necesitan una parte del protocolo del bus. Así pues, sobre un mismo medio físico de bus, existen dos tipos de comunicaciones, la existente entre maestros para el paso de testigo, y la existente entre los nodos maestros y sus esclavos. La familia Profibus consiste en tres versiones compatibles: PROFIBUS-DP (Distributed Peripherals): Optimizado para alta velocidad y coste reducido. Esta versión de Profibus está diseñada especialmente para comunicación entre sistemas automáticos de control y E/S distribuidos a nivel de campo (periferia descentralizada). Puede ser empleado para reemplazar transmisiones paralelas de señales con 24V o 4..20 mA. El intercambio de datos es cíclico. El tiempo de ciclo del bus ha de ser menor que el tiempo de ciclo del programa del controlador central. Un sistema DP conforme a la norma Profibus-DP puede constar de las siguientes estaciones: ● Maestro DP (clase 1): Un equipo de esta clase se encarga de la tramitación de la tarea de control propiamente dicha. Para tal fin emite y recibe datos de entrada y salida del proceso. 7 ● ● Maestro DP (clase 2): Se trata de una unidad de programación, diagnóstico o gestión encargada de ejecutar funciones de diagnóstico y servicio técnico. Esclavo DP: Se trata de un equipo en el nivel de campo a través del cual se leen señales de proceso o se emiten señales al mismo. Los equipos pueden tener estructura modular. PROFIBUS-PA (Process Automation): Está especialmente diseñado para automatización de procesos. Permite que sensores y actuadores puedan ser conectados a un bus común en áreas de especial seguridad. Permite comunicación de datos y transporte de energía sobre el mismo bus empleando tecnología de dos cables, acorde con el estándar internacional IEC 1158-2. Básicamente, es la ampliación de Profibus-DP compatible en comunicación con una tecnología que permite aplicaciones para la automatización de procesos en recintos expuestos al peligro de explosiones. PROFIBUS-FMS (Fieldbus Message Specification): Es la solución de propósito general para tareas de comunicación a nivel de control. Los potentes servicios FMS abren un amplio rango de aplicaciones y proveen gran flexibilidad. También puede ser empleado para tareas de comunicaciones extensas y complejas. En Profibus-FMS la funcionalidad es más importante que conseguir un sistema con tiempo de reacción pequeño. En la mayor parte de aplicaciones, el intercambio de datos es fundamentalmente acíclico en base a la demanda del proceso del usuario. A continuación se muestra cómo es posible la utilización de Profibus dentro de los diferentes niveles de la pirámide de automatización y su posible uso conjunto con redes corporativas basadas en Ethernet (TCP/IP) con el empleo de las tres versiones Profibus existentes. 8 Estructura de una pirámide de automatización basada en las diferentes versiones Profibus (incluyendo Profibus sobre TCP/IP mediante MMS). HART ¿Qué es la comunicación HART? La forma principal de comunicación utilizada en los transmisores analógicos es un bucle de corriente con un rango normal de 4 mA a 20 mA, que emplea un transmisor, un receptor y una fuente de alimentación. Habilita funciones como calibración remota, interrogación de fallas y transmisión de datos de variables de proceso. Los transmisores y receptores de baja potencia deben operar con la corriente mínima, 4 mA o menos, dependiendo del "margen superior" requerido para la indicación de error. Estos bucles de corriente son fiables, robustos y altamente inmunes a las interferencias ambientales en largas distancias de comunicación. Una desventaja significativa, sin embargo, es que un bucle sólo permite la comunicación unidireccional de un sensor, o a un actuador, y sólo puede transmitir una variable de proceso. La introducción del estándar HART proporcionó un medio para crear transmisores "inteligentes", al agregar capacidad de comunicación digital, compartiendo la misma línea de par trenzado que se usa para la instrumentación tradicional de 4 mA a 20 mA. El protocolo HART se ha convertido en el estándar mundial para enviar y recibir información digital a través de cables analógicos entre dispositivos inteligentes y un sistema de control o monitoreo. Beneficios del protocolo de comunicación HART 9 Los beneficios de seleccionar HART son capacidad analógica, capacidad digital, interoperabilidad y disponibilidad. La compatibilidad analógica facilita la comunicación analógica y digital simultánea. HART se puede utilizar con una variedad de sensores y dispositivos. Permite el diagnóstico de los sensores a través de condiciones a prueba de fallas, lo que alerta a los usuarios sobre cualquier problema potencial; El protocolo HART está probado en el campo y tiene una base de instalación de millones. La interoperabilidad es que el protocolo HART es el estándar de la industria y se puede usar junto con una amplia gama de sensores y dispositivos debido a las características comunes de estructura de datos y comandos. Deficiencias del protocolo de comunicación HART El protocolo de comunicación HART es bastante lento en comparación con otros sistemas de bus de campo como Foundation fieldbus y Profibus y este tiempo de respuesta lento puede causar dificultades en algunas aplicaciones industriales. La velocidad HART es generalmente adecuada para sistemas de monitoreo simples donde las variables del proceso no cambian rápidamente. MINIMAP Se trata de otra red de comunicaciones propuesta para aplicaciones industriales, que consiste en una arquitectura de 3 capas en la que se han omitido las capas de la 3 a la 6 del modelo OSI. El principal beneficio de esta reducción es la mejora del rendimiento. Sin embargo, esto se consigue a costa de reducir la funcionalidad. ● ● ● La arquitectura MINI-MAP es utilizada sólo para hacer la conexión de dispositivos simples, como censores y actuadores, con un controlador. El MAP es un protocolo pensado para redes de tipo WAN mientras que el MINIMAP está pensado para redes de tipo LAN. La red MINIMAP no es más que un subconjunto de la red MAP. Características ● ● ● ● ● Niveles OSI 1, 2, 7. Medio físico Cable coaxial de 75 O. Codificación Modulación de frecuencia en banda base. Velocidad 5 Mbits/s., Topología Bus. Paso de testigo en anillo según IEEE 802.4. Ventajas Flexibilidad de sistema que ofrece la capacidad de mezclar y compartir diferentes tecnologías de red en la misma plataforma, permitiendo operar con diversos segmentos de mercado y grupos de clientes a través de dispositivos de acceso. 10 Desventajas ● ● ● ● ● Comunicaciones fuera de la red local. MiniMAP limita las posibilidades de comunicación fuera de la red local. No se permite la segmentación y reconstrucción de mensajes largos. Detección automática de fallos en las comunicaciones (no detecta fallos). Seguridad, no introduce mecanismos que aseguren la seguridad de comunicaciones. Modelo TCP / IP ● ● ● El modelo TCP / IP consta de cinco capas: la capa de aplicación, la capa de transporte, la capa de red, la capa de enlace de datos y la capa física. Las primeras cuatro capas proporcionan estándares físicos, interfaz de red, internetworking y funciones de transporte que corresponden a las primeras cuatro capas del modelo OSI y estas cuatro capas están representadas en el modelo TCP / IP por una sola capa llamada capa de aplicación. TCP / IP es un protocolo jerárquico compuesto por módulos interactivos y cada uno de ellos proporciona una funcionalidad específica. Funciones de las capas TCP / IP: Capa de acceso a la red ● ● ● ● ● Una capa de red es la combinación de la capa física y la capa de enlace de datos definida en el modelo de referencia OSI. Define cómo se deben enviar los datos físicamente a través de la red. Esta capa es la principal responsable de la transmisión de datos entre dos dispositivos en la misma red. Las funciones que lleva a cabo esta capa son encapsular el datagrama IP en tramas transmitidas por la red y mapear direcciones IP en direcciones físicas. Los protocolos utilizados por esta capa son Ethernet, Token Ring, FDDI, X.25, Frame Relay. Capa de Internet ● ● ● Una capa de Internet es la segunda capa del modelo TCP / IP. Una capa de Internet también se conoce como capa de red. La principal responsabilidad de la capa de Internet es enviar los paquetes desde cualquier red y llegan al destino independientemente de la ruta que tomen. Capa de transporte La capa de transporte es responsable de la confiabilidad, el control de flujo y la corrección de los datos que se envían a través de la red. Los dos protocolos utilizados en la capa de transporte son el protocolo de datagrama de usuario y el protocolo de control de transmisión. 11 Capa de aplicación ● ● ● ● Se encarga de manejar protocolos de alto nivel, cuestiones de representación. Esta capa permite al usuario interactuar con la aplicación. Cuando un protocolo de capa de aplicación desea comunicarse con otra capa de aplicación, reenvía sus datos a la capa de transporte. Se produce una ambigüedad en la capa de aplicación. Todas las aplicaciones no se pueden colocar dentro de la capa de aplicaciones, excepto aquellas que interactúan con el sistema de comunicación. Por ejemplo: el editor de texto no se puede considerar en la capa de aplicación mientras el navegador web usa el protocolo HTTP para interactuar con la red donde el protocolo HTTP es un protocolo de capa de aplicación. Conclusiones La industria manufacturera ha experimentado una gran mejora en la adquisición de datos, monitoreo y control de equipos desde la introducción del bus de campo. Ahora, estamos viendo un cambio hacia los dispositivos Ethernet industriales; que cuentan con velocidades más rápidas, mayor ancho de banda, conteos de nodos ilimitados, diagnósticos mejorados, integración más fácil y el uso de conexiones inalámbricas estándar. El nivel de hardware determina las propiedades fundamentales del bus, como la longitud de los cables y la capacidad de transmisión. El nivel de protocolo determina qué mensajes y funciones estandarizadas están disponibles entre el maestro y el esclavo. Dependiendo de la aplicación, cada uno de los buses de campo establecidos tiene sus fortalezas y debilidades. La selección de un bus de campo específico está determinada frecuentemente por la disponibilidad de los componentes para una interfaz de bus de campo específica. 12