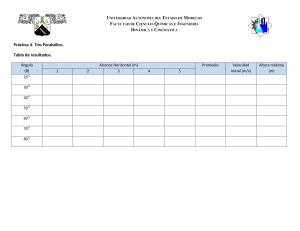
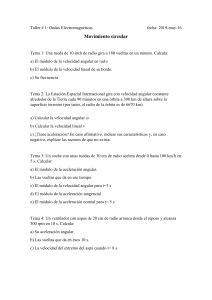
Biomecánica y Control Motor: Cinemática Kinesiología • “Ciencia dedicada al estudio del Movimiento Humano” • En relación a la actividad profesional la definición es más amplia. Kinesiología ¿Ciencia y/o Tecnología? Ciencia Adquirir conocimiento acerca del mundo circundante a través de las observaciones y razonamientos metódicamente organizados. La ciencia tiene por finalidad la verdad por la verdad misma Tecnología Conjunto de conocimientos que permiten la construcción de objetos y la modificación del entorno, a fin de satisfacer las necesidades y deseos humanos. La meta de la tecnología es la verdad útil para alguien. ¿Ciencia y/o Tecnología? La Kinesiología puede actuar como una tecnología o una ciencia, y la naturaleza del problema al que se enfrenta el profesional es el factor determinante. “Cualquier evaluación del movimiento humano debe ser precedida por una medición y una fase de descripción” D.A. Winter. Niveles de Evaluación (Según Winter D.A.) 1. Observación Directa 2. Medición del Movimiento 2.1. Descripción 3. Análisis (biomecánico) 4. Evaluación e Interpretación DA. Winter. Biomechanics and Motor Control of Human Movement. Capítulo 1: Biomechanics as an interdiscipline. Análisis de Movimiento “Ciencia que describe el movimiento de los segmentos en las distintas fases de un gesto y los músculos involucrados en los movimientos de este” Se basa en el análisis cualitativo y cuantitativo Hamill J., Kathleen M. Biomechanical Basis of Human Movement. 3rd edition 2009. Análisis de Movimiento • Considera las ciencias de la anatomía, biomecánica y fisiología. • Ciencia que estudia las fuerzas internas y externas que actúan sobre el Cuerpo Humano. • Utiliza aplicaciones de la mecánica para el análisis y descripción del Movimiento. • Mecánica: Cinética y Cinemática/ Dinámica, Estática y Cinemática. Cuantitativo v/s Cualitativo • Análisis Cualitativo. – Basado en la observación de un gesto. – Subjetivo. (no por eso menos importante) • Análisis Cuantitativo. – Basado en el cinética y cinemática. – Objetivo. (requiere bioinstrumentación) El Análisis de Movimiento no es un tema actual”. D. Roetenberg, UTWENTE Aristóteles (348-322 AC) L. Da Vinci (1452-1519) Galileo Galilei (1564-1643) G. Borelli (1608-1679) Estudio del Movimiento Estudio del Movimiento E. Muybridge (S XIX) : Consigue disecar el movimiento. Secuencia Fotográfica: “El Caballo en movimiento” Inicio del Estudio del Movimiento Moderno Estudio del Movimiento • Mary Patricia Murray • Medición de patrones de movimientos durante la marcha Humana Bioinstrumento Herramienta (Sistema) utilizada para capturar Señales Biológicas. Señal • Símbolo o Signo que informa respecto a un fenómeno. Reemplaza al lenguaje. • “Es un fenómeno físico en el cual una o varias de sus características pueden variar para representar información”. • Análoga • Digital Estructura de un Bioinstrumento Adquisición de Datos Variables Cinemática Transductor Electrogoniómetro Cinematografía Movimiento Humano Optoeléctricos Convertidor A/D Cinética Platf. Fuerza EMG Amplificador Para la captura por medio de video se toman señales reales que se procesan en convertidores análogo-digitales. de Datos Análisis Análisis del Movimiento ¿Qué elementos son separados? •Parámetros Cinemáticos (Lineal y Angular) – Posición – Velocidad – Aceleración •Parámetros Cinéticos – Torque – Fuerza – Presión •Parámetros Electrofisiológicos – Tiempo de Activación – Nivel de Actividad Muscular – Índice de Fatiga Bioinstrumentos Principales Parámetros Cinemáticos (Lineal y Angular) Sistemas Magnéticos y Electrogoniómetros Acelerómetros Videofotogrametría Parámetros Cinéticos Plataformas de Fuerza Posturografía Parámetros Electrofisiológicos Electromiografía Bioinstrumentos Principales Parámetros Cinemáticos (Lineal y Angular) Sistemas Magnéticos y Electrogoniómetros Acelerómetros Videofotogrametría Parámetros Cinéticos Plataformas de Fuerza Posturografía Parámetros Electrofisiológicos Electromiografía Análisis Cinemático • Describe objetiva y cuantitativamente el movimiento sin considerar las fuerzas involucradas. • Evalúa los parámetros: posición(desplazamiento), velocidad y aceleración. • Estos parámetros pueden reflejar “calidad del movimiento”. • Puede ser usado indirectamente para estimar las fuerzas implicadas (dinámica inversa) Análisis Cinemático • Las herramientas para el Análisis Cinemático son clasificadas como: 1. Directas: Miden directamente la variable de interés mediante el uso de sensores. • Electrogoniómetros • Acelerómetros • Giroscopios 2. Indirectas: A partir de datos de la posición de un marcador establece la posición de un punto de interés para luego derivar los parámetros restantes. • Sistemas de Imagen • Sistemas Magnéticos Electrogoniómetros • Potenciómetro eléctrico dispuesto en las articulaciones para medir sus ángulos. Electrogoniómetros (1) Electrogoniómetros Ventajas Medición directa ambulatoria y generalmente de bajo costo La señal de salida queda disponible inmediatamente para almacenamiento o conversión en el computador. Señal fácil de interpretar. La rotación planar es registrada independiente del plano de movimiento articular Desventajas Difíciles de alinear sobre los músculos o tejido graso. Pueden restringir el movimiento del paciente si se usa más de uno. Dificultad para describir movimientos de articulaciones más complejos. 1.- Winter D. Biomechanics and Motor Control of Human Movement. 3 ed. New Jersey: John Wiley & Sons, Inc.; 2005.p. 13-58. Acelerómetros Acelerómetros • Medición directa de aceleración de los segmentos. • Transductores de Fuerza de reacción asociada a una aceleración lineal (potenciómetro). • Miden aceleración en un eje de movimiento. • Transducción sistema masa-resorte: cuando la masa es acelerada el resorte modifica su longitud de manera proporcional a la fuerza y aceleración experimentada . • F = ma a = F/m a = kx/m Salida de proporcional de voltaje. Ley de Hooke = kx (Constante de hooke * Longitud del resorte) Acelerómetros (1) Acelerómetros Ventajas Fácil instalación, pequeños La señal queda disponible inmediatamente para almacenamiento o conversión. Desventajas Si se usa un gran número, eleva el costo. La alceleración es relativa a la posición en los segmentos. Sensible a golpes y frágiles. La masa del acelerómetro puede generar “artefactos” 1.- Winter D. Biomechanics and Motor Control of Human Movement. 3 ed. New Jersey: John Wiley & Sons, Inc.; 2005.p. 13-58. Aplicaciones de la Acelerometría Estimación de la postura y Nivel de Movilidad durante largos períodos. Medición de la Inclinación y Orientación de los segmentos corporales. Registro de aceleraciones lineales durante la marcha. Aplicación en Deporte Aplicación en Deporte Aceleraciones lineales durante la Marcha Información: Parámetros espacio temporales de la marcha. Valoración de la estabilidad Dinámica. Utilidad: • Aspectos relacionados con la organización de la postura durante la marcha. • Modificaciones de la marcha asociadas al envejecimiento. • Descripción de patrones normales y patológicos de la Marcha. Videofotogrametría Videofotogrametría “Debido a la complejidad de los movimientos humanos, los sistemas basados en el análisis de imágenes son los únicos que posibilitan la captura de la mayoría de los datos”.(1) 1. Winter D. Biomechanics and Motor Control of Human Movement. 3 ed. New Jersey: John Wiley & Sons, Inc.; 2005. Videofotogrametría Técnica de Medición indirecta: requiere de etapas de procesamiento y análisis de los datos antes de conseguir información. Logra la disección del Movimiento Humano en eventos y fases. Su objetivo es describir, cuantificar y analizar el movimiento usando parámetros cinemáticos. Videofotogrametría • Requerimientos • Cámaras • Calidad de Imagen (Megapixels) • Frecuencia de muestreo (FPS, Hz) • Espacio dimensionado • Marcadores • Condiciones de Luz • Digitalización de la grabación • Software para el análisis de los datos. Videofotogrametría Videofotogrametría Videofotogrametría Videofotogrametría Videofotogrametría Videofotogrametría Videofotogrametría Videofotogrametría Videofotogrametría Videofotogrametría Parámetros Cinemáticos (Lineal / Angular) Posición Velocidad 2D / 3D Aceleración Trayectoria o Recorrido ΔS Es el conjunto de puntos que un móvil ocupa en el espacio al transcurrir el tiempo. Parámetro de cinemática lineal (longitud de la curva) (escalar) El desplazamiento de un objeto es definido por cuanto se aleja este de su posición de inicio y por la dirección en que este se mueve Desplazamiento Δr Es el cambio del vector posición en el tiempo (longitud de la recta + su dirección y sentido) Cinemática Lineal Trayectoria 1,2m Desplazamiento 0m Cinemática del Centro de Masa durante el Salto Vertical Cinemática Lineal Cinemática vertical y medio-lateral del Centro de Masa durante la Marcha Configuración Segmental Representación segmental en el Plano de Coordenadas cartesianas Y Y X X Permite visualizar los cambios de posición de los segmentos. Muestra una construcción de segmentos a partir de las coordenadas de distintos puntos identificados. Videofotogrametría Componentes de un Segmento Y Y M 2 M1 = (X2, Y2) 1 M2 = (X1, Y1) Y 1 M 2 X 1 X 2 X Proyección ortogonal Convención Angular. Y XII M1 +Z III IX -Z VI θ1 M2 θ1 = 130° θ2 = -230° θ3 = 60° θ4 = -300° θ2 θ3 M3 θ4 X Ángulos absoluto Un ángulo absoluto, corresponde al ángulo de inclinación de un segmento corporal. Este tipo de ángulo describe la orientación de un segmento en el espacio (….o plano). Corresponde al ángulo de inclinación en relación al espacio de un segmento corporal. Notación Polar de un Segmento M1 A² = Ay² + Ax² M1 = (X2, Y2) A y A θ M2 M2 = (X1, Y1) θ = Arctg (Y2 - Y1) (X2 – X1) A x Ángulos absoluto Y θ = Arctg (Y2 - Y1) (X2 – Y1) M1 θ Absoluto segmento = Arctg (My Proximal – My Distal) (Mx Proximal – Mx Distal) θ1 Áng. Segmento Pierna = Arctg ( 4.0 – 1.4) (1.5 – 0.4) M2 θ2 M1 = (0.5, 6.5); TM M2 = (1.5, 4.0); CMF M3 = (0.4, 1.4); ML = Arctg ( 2.6) (1.1) = Arctg (2.36) M3 Ángulo segmento Pierna = 67.0° X Ángulos absoluto Y M1 = (0.5, 6.5); TM M2 = (1.5, 4.0); CMF M3 = (0.4, 1.4); ML M1 θ = Arctg (Y2 - Y1) (X2 - Y2) θ Absoluto segmento = Arctg (My Proximal – My Distal) (Mx Proximal – Mx Distal) θ1 Áng. Segmento Muslo = Arctg ( 6.5 – 4.0) (0.5 – 1.5) M2 = Arctg ( 2.5) (– 1.0) = Arctg ( - 2.5) θ2 θ = -68.2° M3 Ángulo del segmento Muslo = 180 – 68,2 = 112° X Estimación del Ángulo Absoluto: Ángulo formado por el segmento y la horizontal. Ángulo Relativo: Ángulo formado entre los segmentos de una articulación. Puede ser calculado mediante la suma de ángulos absolutos, cuando el ángulo es cortado por la horizontal y es formado por 2 pendientes de distinto signo. En otras condiciones se realizan modificaciones de la fórmula. Ángulos Relativo: Angulo Articular. Un ángulo relativo, es el ángulo formado entre los ejes longitudinales de dos segmentos. Los ángulos relativos no describen la posición de los segmentos en el plano o espacio. Ángulos Relativo: Angulo Articular. Y M M1 = (0.5, 6.5) M2 = (1.5, 4.0) M3 = (0.4, 1.4) 1 θ1 β β = Flexión de Rodilla θ2 β = θ1- θ2 M 2 β = 111.8°- 67° β = 44.8° θ2 M 3 X Ángulos Relativo: Angulo Articular. Y M 1 b a β = Flexión de Rodilla M1 = (0.5, 6.5) M2 = (1.5, 4.0) M3 = (0.4, 1.4) θ β = 180- θ a= a= M √ ( M1x – M3x )² + ( M1y – M3y)² √ ( 0.5 – 0.4 )² + ( 6.5 – 1.4)² a= 2 √ ( 0.1 )² + (5.1)² β a= b= c 5.1 √ ( M1x – M2x )² + ( M1y – M2y)² b = 2.7 M c= 3 X √ ( M2x – M3x )² + ( M2y – M3y)² c = 2.8 Ángulos Relativo: Angulo Articular. Y Ley de Coseno: a² = b² + c² - 2*b*c*Cos θ M 1 5.1² = 2.7² + 2.8² - 2*2.7*2.8*Cos θ b θ a β 5.1² - 2.7² - 2.8² = 2*2.7*2.8*Cos θ /-1 Cos θ = -10.88/15.12 M Θ = Arccos – 0.7196 2 Θ = 136.0° c β = 180°- θ = 180° – 136° = 44° M 3 X Estimación de ángulos relativos El teorema del coseno simplifica la estimación del ángulo relativo, pues se aplica en cualquier condición. Considera sólo 3 puntos para definir una articulación. Se considera que “a” es el cateto opuesto a θ (ángulo de interés), “b” y “c” pueden ser cualquiera de los restantes catetos del triángulo Cinemática en el Mov. Humano • Cinemática lineal. • Cinemática angular. Rapidez. “La distancia recorrida (a lo largo de cualquier trayectoria) dividida por el tiempo que duró el recorrido” “La rapidez es un vector cuantitativo definido como la razón de tiempo en la cual un objeto cambia de posición” Vm = ∆d = df - di ∆t t f – ti Velocidad Concepto que abraca rapidez y la dirección a un tiempo es la velocidad”. Aceleración “Aceleración es la tasa de cambio de la velocidad con respecto al tiempo” Frame ∆t1 ∆to Y 1 Y 2 X 1 ∆t2 Y 3 X ∆t= 0,03 2 s X 3 Análogo- Métrico Plano de Movimiento 480p Digital Píxel 620p Frame t = 0.03s t = 0.06s t = 0.09s t = 0.12s t = ns Método de diferencia central Este método emplea la diferencia o cambio de posición sobre dos cuadros como numerador. El denominador en el cálculo de la velocidad, es el cambio sobre dos intervalos de tiempo. Determinación Cuadro a Cuadro según método de diferencia central Calculo de la velocidad vertical Cuadro Tiempo Posición vertical 1 0.0000 0.00 2 0.0167 0.15 3 0.0334 0.22 4 0.0501 0.27 5 0.0668 0.30 6 0.0835 0.20 7 0.1002 0.00 8 0.01169 -0.26 9 0.1336 -0.30 10 0.1503 -0.22 Ejemplo: v xi v yi v y3 = x i+1 -x i -1 Componente horizontal 2t y i+1 - y i -1 Componente vertical 2t y 4 – y2 t4 – t2 0.27 m – 0.15 m 0.0501s – 0.0167s = 3.59 m/s Calculo de la aceleración desde un set de tiempo/velocidad Cuadro Tiempo Posición vertical Velocidad (Vy) 1 0.0000 0.00 0.00 2 0.0167 0.15 6.59 3 0.0334 0.22 3.59 4 0.0501 0.27 2.40 5 0.0668 0.30 -2.10 6 0.0835 0.20 -8.98 7 0.1002 0.00 -13.77 8 0.01169 -0.26 -8.98 9 0.1336 -0.30 1.20 10 0.1503 -0.22 8.98 11 0.1670 0.00 0.00 Ejemplo: a xi a yi a y4 = Vx i+1 - Vxi -1 2t Vy i+1 - Vy i -1 2t V5 - V3 t5 - t3 -2.10 m/s – 3.59m/s 0.0668s – 0.0334s = -170.36m/s² Calculo de la velocidad vertical Cuadro Tiempo Posición vertical 1 0.0000 0.00 2 0.0167 0.15 3 0.0334 0.22 4 0.0501 0.27 5 0.0668 0.30 6 0.0835 0.20 7 0.1002 0.00 8 0.1169 -0.26 9 0.1336 -0.30 10 0.1503 -0.22 Movimiento Angular Distancia Angular y Desplazamiento La distancia angular es el total de todos los cambios angulares medidos, y al igual que en el caso lineal, la distancia angular no es igual que el desplazamiento angular. Desplazamiento angular es la diferencia entre la posición inicial y final de un objeto que rota. 30º - 0º = 30º Desplazamiento Angular 0º Posición Inicial 30º Posición Final Representación de la Posición Angular en función del Tiempo La reconstrucción de los segmentos corporales a partir de las coordenadas de los puntos identificados en el espacio, permite estimar la pendiente de éstos y la relación angular entre ellos. Gráfica de Posición Angular en función del Tiempo 1. Uno de los productos del análisis videofotogramétrico. 2. Muestra el comportamiento de la articulación a través de su rango de movimiento durante una tarea motora. 3. Implica un procesamiento Matemático de las coordenadas de los puntos registrados. 4. Prescinde del Lenguaje para describir el movimiento. 5. Posibilita comparar antes-después, normal -patológico, diferencias entre grupos. En el desplazamiento angular es necesario designar la dirección de la rotación. Una rotación es considerada positiva (+) si es en contra del movimiento de las agujas del reloj, y es considerada negativa (-) si es en la misma dirección que se mueven las agujas del reloj. Si el ángulo absoluto de un segmento (θ) fue calculado para sucesivas posiciones en el tiempo, el desplazamiento angular (Δθ) pude ser: Δθ = θ final - inicial θ Radian 72º = 72º/ 57.3º = 1.26 rad. 0.67 rad= 0.67 * 57.3 = 38.4º La medición angular en radianes es a menudo determinada en múltiples de pi (Π = 3.1416), de esta manera: 2Π radianes = circulo completo Π radianes = 180º Π / 2 radianes = 90º 1 radian = 57.3º Velocidad Angular Vector cuantitativo que describe el cambio en el tiempo de la posición angular = Cambio en posición angular Cambio en el tiempo = final - inicial t final – t inicial = t Ej: Si el ángulo inicial de un segmento es 34º en un tiempo determinado de 1.25 s y el segmento se mueve a un ángulo de 62º alcanzando para ello un tiempo de 1.30s, la velocidad angular puede ser: = t = 62º - 34º 1.30 – 1.25 = 28º/ 0.05s = 560º/s “ la unidad de expresión se puede dar en º/s ó rad/s” Aceleración Angular Grado de cambio de la velocidad angular c/respecto al tiempo Aceleración angular = cambio en velocidad angular cambio en el tiempo = final - inicial t final – t inicial = t El método usado para el cálculo de la velocidad angular sobre una serie de cuadros de video en un análisis cinemático, también puede ser el método de diferencia central. ω i θ -θ i+1 i t --1t i+1 i -1 Velocidad lineal y angular En algunos movimientos humanos, el resultado del movimiento es lineal, mientras el movimiento de los segmentos son de naturaleza angular La relación entre velocidad lineal y angular es similar a la relación entre desplazamiento lineal y angular. Así la velocidad lineal de un punto de un cuerpo que rota es el producto de la distancia del punto con respecto al eje de rotación y la velocidad angular del cuerpo Cinemática 3D Y M1 3 1 M2 4 2 M3 X