SOLUTIONS MANUAL
to accompany
Digital Signal Processing:
A Computer-Based Approach
Third Edition
Sanjit K. Mitra
Prepared by
Chowdary Adsumilli, John Berger, Marco Carli,
Hsin-Han Ho, Rajeev Gandhi, Chin Kaye Koh,
Luca Lucchese, and Mylene Queiroz de Farias
Not for sale.
1
Chapter 2
2.1
(a) x1 1 = 22.85, x1 2 = 9.1396, x1 ∞ = 4.81,
(b) x 2 1 = 18.68, x 2 2 = 7.1944, x 2 ∞ = 3.48.
2.2
1, n ≥ 0,
1, n < 0,
µ[ n] = ⎧⎨
Hence, µ[ −n − 1] = ⎧⎨
Thus, x[ n] = µ[ n] + µ[ − n − 1].
⎩0, n < 0.
⎩0, n ≥ 0.
2.3
(a) Consider the sequence defined by x[ n] = ∑ δ[ k ]. If n < 0, then k = 0 is not included
n
k = −∞
in the sum and hence, x[n] = 0 for n < 0. On the other hand, for n ≥ 0, k = 0 is included
in the sum, and as a result, x[n] =1 for n ≥ 0. Therefore,
n
1, n ≥ 0,
x[ n] = ∑ δ[ k ] = ⎧⎨
= µ[ n].
0
⎩ , n < 0,
k = −∞
2.4
2.5
1, n ≥ 0,
1, n ≥ 1,
it follows that µ[ n − 1] = ⎧⎨
Hence,
(b) Since µ[ n] = ⎧⎨
0
,
n
0
,
<
⎩
⎩0, n < 1.
1, n = 0,
µ[ n] − µ[ n − 1] = ⎧⎨
= δ[ n].
⎩0, n ≠ 0,
Recall µ[ n] − µ[ n − 1] = δ[ n]. Hence,
x[ n] = δ[ n] + 3δ[ n − 1] − 2δ[ n − 2] + 4δ[ n − 3]
= (µ[ n] − µ[ n − 1]) + 3(µ[ n − 1] − µ[ n − 2]) − 2(µ[ n − 2] − µ[ n − 3]) + 4(µ[ n − 3] − µ[ n − 4])
= µ[ n] + 2µ[ n − 1] − 5µ[ n − 2] + 6µ[ n − 3] − 4µ[ n − 4].
(a) c[ n] = x[ − n + 2] = {2 0 − 3 − 2 1 5 − 4},
↑
(b) d[ n] = y[ − n − 3] = {− 2 7 8 0 − 1 − 3 6 0 0},
↑
(c) e[ n] = w[ − n] = {5 − 2 0 − 1 2 2 3 0 0},
↑
(d) u[ n] = x[ n] + y[ n − 2] = {− 4 5 1 − 2 3 − 3 1 0 8 7 − 2},
↑
(e) v[ n] = x[ n] ⋅ w[ n + 4] = {0 15 2 − 4 3 0 − 4 0},
↑
(f) s[ n] = y[ n] − w[ n + 4] = {− 3 4 − 5 0 0 10 2 − 2},
↑
(g) r[ n] = 3.5 y[ n] = {21 − 10.5 − 3.5 0 2.8 24.5 − 7}.
↑
2.6
(a) x[ n] = −4δ[ n + 3] + 5δ[ n + 2] + δ[ n + 1] − 2δ[ n] − 3δ[ n − 1] + 2δ[ n − 3],
y[ n] = 6δ[ n + 1] − 3δ[ n] − δ[ n − 1] + 8δ[ n − 3] + 7δ[ n − 4] − 2δ[ n − 5],
w[ n] = 3δ[ n − 2] + 2δ[ n − 3] + 2δ[ n − 4] − δ[ n − 5] − 2δ[ n − 7] + 5δ[ n − 8],
(b) Recall δ[ n] = µ[ n] − µ[ n − 1]. Hence,
x[ n] = −4(µ[ n + 3] − µ[ n + 2]) + 5(µ[ n + 2] − µ[ n + 1]) + (µ[ n + 1] − µ[ n])
− 2(µ[ n] − µ[ n − 1]) − 3(µ[ n − 1] − µ[ n − 2]) + 2(µ[ n − 3] − µ[ n − 4])
Not for sale.
2
= −4µ[ n + 3] + 9µ[ n + 2] − 4µ[ n + 1] − 3µ[ n] − µ[ n − 1] + 3µ[ n − 2] + 2µ[ n − 3] − 2µ[ n − 4],
2.7
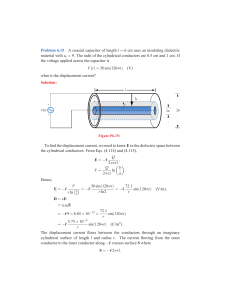
(a)
x[n-1]
_
z 1
x[n]
x[n-2]
_
z 1
h[2]
h[1]
h[0]
y[n]
+
+
From the above figure it follows that y[ n] = h[ 0] x[ n] + h[1] x[ n − 1] + h[2] x[ n − 2].
(b)
x[n]
h[0]
w[n]
+
_1
+
y[n]
_1
z
z
β11
x[n _ 1]
+
_
z 1
+
_
z 1
β 21
x[n _ 2]
β12
w[n _ 1]
w[n _ 2]
β 22
From the above figure we get w[ n] = h[0]( x[ n] + β11 x[ n − 1] + β 21 x[ n − 2]) and
y[ n] = w[ n] + β12 w[ n − 1] + β 22 w[ n − 2]. Making use of the first equation in the second
we arrive at
y[ n] = h[0]( x[ n] + β11 x[ n − 1] + β 21 x[ n − 2])
+ β12 h[0]( x[ n − 1] + β11 x[ n − 2] + β 21 x[ n − 3])
+ β 22 h[0]( x[ n − 2] + β11 x[ n − 3] + β 21 x[ n − 4])
= h[0]( x[ n] + (β11 + β12 ) x[ n − 1] + (β 21 + β12 β11 + β 22 ) x[ n − 2]
+ (β12 β 21 + β 22 β11 ) x[ n − 3] + β 22 β 21 x[ n − 4]).
(c) Figure P2.1(c) is a cascade of a first-order section and a second-order section. The
input-output relation remains unchanged if the ordering of the two sections is
interchanged as shown below.
x[n]
0.6
w[n]
+
_
+
_
z 1
0.8
u[n]
+
y[n+1]
_
z 1
0.3
+
+
0.4
y[n]
w[n _ 1]
_
z 1
_ 0.5
0.2
w[n _ 2]
Not for sale.
3
The second-order section can be redrawn as shown below without changing its inputoutput relation.
x[n]
0.6
w[n]
+
_
+
+
+
y[n+1]
_
z 1
_
_
z 1
z 1
0.8
w[n _ 1]
0.3
0.4
y[n]
+
_
z 1
_
z 1
_ 0.5
u[n]
0.2
w[n _2]
The second-order section can be seen to be cascade of two sections. Interchanging their
ordering we finally arrive at the structure shown below:
0.6
+
x[n]
s[n]
_
z 1
_
0.3
x[n _ 1]
u[n]
+
0.8
_
z 1
x[n _ 2]
y[n+1]
_
z 1
_
z 1
+
+
+
0.4
u[n _ 1]
y[n]
_
z 1
_ 0.5
0.2
u[n _ 2]
Analyzing the above structure we arrive at
s[ n] = 0.6 x[ n] + 0.3 x[ n − 1] + 0.2 x[ n − 2],
u[ n] = s[ n] − 0.8u[ n − 1] − 0.5u[ n − 2],
y[ n + 1] = u[ n] + 0.4 y[ n].
From u[ n] = y[ n + 1] − 0.4 y[ n]. Substituting this in the second equation we get after some
algebra y[ n + 1] = s[ n] − 0.4 y[ n] − 0.18 y[ n − 1] + 0.8 y[ n − 2]. Making use of the first
equation in this equation we finally arrive at the desired input-output relation
y[ n] + 0.4 y[ n − 1] + 0.18 y[ n − 2] − 0.2 y[ n − 3] = 0.6 x[ n − 1] + 0.3 x[ n − 2] + 0.2 x[ n − 3].
(d) Figure P2.19(d) is a parallel connection of a first-order section and a second-order
section. The second-order section can be redrawn as a cascade of two sections as
indicated below:
x[n]
w[n]
+
+
_
_
z 1
z 1
_
0.8
w[n _ 1]
_
z 1
_ 0.5
+
y 2[n]
_
z 1
w[n _2]
Not for sale.
0.3
0.2
4
Interchanging the order of the two sections we arrive at an equivalent structure shown
below:
0.3
x[n]
_1
+
z
q[n]
y 2[n]
+
_
z 1
_
0.2
_
z 1
0.8
+
y 2 [n _ 1]
_
z 1
_ 0.5
y 2[n _ 2]
Analyzing the above structure we get
q[ n] = 0.3 x[ n − 1] + 0.2 x[ n − 2],
y2 [ n] = q[ n] − 0.8 y2 [ n − 1] − 0.5 y2 [ n − 2].
Substituting the first equation in the second we have
y2 [ n] + 0.8 y2 [ n − 1] + 0.5 y2 [ n − 2] = 0.3 x[ n − 1] + 0.2 x[ n − 2].
(2-1)
Analyzing the first-order section of Figure P2.1(d) given below
u[n] _ 1 u[n _ 1] 0.6
y 1 [n]
z
x[n]
+
0.4
we get
u[ n] = x[ n] + 0.4u[ n − 1],
y1[ n] = 0.6u[ n − 1].
Solving the above two equations we have
y1[ n] − 0.4 y1[ n − 1] = 0.6 x[ n − 1].
(2-2)
The output y[n] of the structure of Figure P2.19(d) is given by
y[ n] = y1[ n] + y2 [ n].
(2-3)
From Eq. (2-2) we get 0.8 y1[ n − 1] − 0.32 y1[ n − 2] = 0.48 x[ n − 2] and
0.5 y1[ n − 2] − 0.2 y1[ n − 3] = 0.3 x[ n − 3]. Adding the last two equations to Eq. (2-2) we
arrive at y1[ n] + 0.4 y1[ n − 1] + 0.18 y1[ n − 2] − 0.2 y1[ n − 3]
(2-4)
= 0.6 x[ n − 1] + 0.48 x[ n − 2] + 0.3 x[ n − 3].
Similarly, from Eq. (2-1) we get
− 0.4 y2 [ n − 1] − 0.32 y2 [ n − 2] − 0.2 y2 [ n − 3] = −0.12 x[ n − 2] − 0.08 x[ n − 3]. Adding this
equation to Eq. (2-1) we arrive at
y2 [ n] + 0.4 y2 [ n − 1] + 0.18 y2 [ n − 2] − 0.2 y2 [ n − 3]
(2-5)
= 0.3 x[ n − 1] + 0.08 x[ n − 2] − 0.08 x[ n − 3].
Adding Eqs. (2-4) and (2-5), and making use of Eq. (2-3) we finally arrive at the inputoutput relation of Figure P2.1(d) as:
y[ n] + 0.4 y[ n − 1] + 0.18 y[ n − 2] − 0.2 y[ n − 3] = 0.9 x[ n − 1] + 0.56 x[ n − 2] + 0.22 x[ n − 3].
Not for sale.
5
2.8
(a) x1* [ n] = {1 − j 4 − 2 − j 5 3 + j 2 − 7 − j 3 − 1 − j},
↑
x1* [ −n] = {− 1 − j − 7 − j 3 3 + j 2 − 2 − j 5 1 − j 4}. Therefore
↑
x1, cs [n] =
1
2
x1, ca [n] =
1
2
(x [n] + x [−n]) = { j1.5
− 4.5 + j 3 − 4.5 − j − j1.5},
*
1
1
↑
(x1[n] − x1*[−n]) = {1 + j2.5
(b) x 2 [ n] = e
jπn / 3
. Hence, x 2* [ n] = e
(
2.5 + j 4 − j 2 − 2.5 + j 4 − 1 + j 2.5}.
↑
− jπn / 3
)
and thus, x 2* [ −n] = e jπn / 3 = x 2 [ n].
Therefore, x2, cs [n] = x2 [n] + x2* [−n] = e j 2 πn / 3 = x2 [n], and
2
1
x2, ca [n] =
1
2
(x2 [n] − x2* [−n]) = 0.
(c) x 3 [ n] = j e − jπn / 5 . Hence, x 3* [ n] = − j e jπn / 5 and thus,
(
)
x 3* [ − n] = − j e − jπn / 5 = − x 3 [ n]. Therefore, x3, cs [n] = x3 [n] + x3*[− n] = 0, and
2
1
x3, ca [n] =
2.9
1
2
(x3[n] − x3*[−n]) = x3[n] = j e − jπn / 5 .
(a) x[ n] = {− 4 5 1 − 2 − 3 0 2}. Hence, x[ − n] = {2 0 − 3 − 2 1 5 − 4}.
Therefore, x ev [ n] =
↑
1
( x[ n] +
2
↑
x[ − n]) =
1
{− 2
2
5 − 2 − 4 − 2 5 − 2}
↑
= {− 1 2.5 − 1 − 2 − 1 2.5 − 1}
and x od [ n] =
↑
1
1
( x[ n] − x[ −n]) = {− 6
2
2
5 4 0 − 4 − 5 6}
↑
= {− 3 2.5 2 0 − 2 − 2.5 3}.
↑
(b) y[ n] = {0 0 0 0 6 − 3 − 1 0 8 7 − 2}. Hence,
↑
y[ − n] = {− 2 7 8 0 − 1 − 3 6 0 0 0 0}.
↑
Therefore, yev [ n] =
and y od [ n] =
1
( y[ n] +
2
y[ − n]) = {− 1 3.5 4 0 2.5 − 3 2.5 0 4 3.5 − 1}
↑
1
( y[ n] − y[ −n]) = {1
2
− 3.5 − 4 0 3.5 0 − 3.5 0 4 3.5 − 1}.
↑
(c) w[ n] = {0 0 0 0 0 0 0 0 0 0 3 2 2 − 1 0 − 2 5}. Hence,
↑
w[ − n] = {5 − 2 0 − 1 2 2 3 0 0 0 0 0 0 0 0 0 0}. Therefore
↑
wev [ n] =
1
(w[ n] + w[ − n])
2
Not for sale.
6
= {2.5 − 1 0 − 0.5 1 1 1.5 0 0 0 1.5 1 1 − 0.5 0 − 1 2.5} and
↑
wod [ n] =
1
(w[ n] − w[ − n])
2
= {− 2.5 1 0 0.5 − 1 − 1 − 1.5 0 0 0 1.5 1 1 − 0.5 0 − 1 2.5}.
↑
2.10
(a) x1[ n] = µ[ n + 2]. Hence, x1[ −n] = µ[ −n + 2]. Therefore,
n ≥ 3,
⎧⎪1 / 2,
1
x1, ev [ n] = (µ[ n + 2] + µ[ − n + 2]) = ⎨ 1, − 2 ≤ n ≤ 2, and
2
⎪⎩1 / 2,
− 3 ≤ n,
n ≥ 3,
⎧⎪ 1 / 2,
1
− 2 ≤ n ≤ 2,
x1, od [ n] = (µ[ n + 2] − µ[ − n + 2]) = ⎨ 0,
2
⎪⎩− 1 / 2,
− 3 ≤ n.
(b) x 2 [ n] = α n µ[ n − 3]. Hence, x 2 [ −n] = α − n µ[ −n − 3]. Therefore,
⎧ 1 αn,
n ≥ 3,
⎪⎪ 2
n
−n
α µ[ n − 3] + α µ[ −n − 3] = ⎨ 0,
− 2 ≤ n ≤ 2, and
1
−
n
⎪ α ,
− 3 ≤ n,
⎪⎩ 2
⎧ 1 αn,
n ≥ 3,
⎪⎪ 2
n
−n
α µ[ n − 3] − α µ[ −n − 3] = ⎨ 0,
− 2 ≤ n ≤ 2,
1
⎪− α − n ,
− 3 ≤ n.
⎪⎩ 2
x 2, ev [ n] =
1
2
(
)
x 2, od [ n] =
1
2
(
)
(c) x 3 [ n] = n α n µ[ n]. Hence, x 3 [ − n] = − n α − n µ[ − n]. Therefore,
(
(
)
)
1
n
1
n α n µ[ n] + ( − n) α − n µ[ − n] = n α
2
2
1
n
1
x 3, od [ n] = n α n µ[ n] − ( − n) α − n µ[ − n] = n α .
2
2
x 3, ev [ n] =
n
(d) x 4 [ n] = α . Hence, x 4 [ −n] = α
1
1
1
1
−n
=α
n
and
= x 4 [ n]. Therefore,
n
x 4, ev [ n] = ( x 4 [ n] + x 4 [ − n]) = ( x 4 [ n] + x 4 [ n]) = x 4 [ n] = α
2
2
and
x 4, od [ n] = ( x 4 [ n] − x 4 [ −n]) = ( x 4 [ n] − x 4 [ n]) = 0.
2
2
2.11 x ev [ n] = (x[ n] + x[ − n]). Thus, x ev [ −n] = (x[ − n] + x[ n]) = x ev [ n]. Hence, x ev [n] is
2
2
1
1
an even sequence. Likewise, x od [ n] = (x[ n] − x[ − n]). Thus,
2
1
x od [ − n] =
1
2
(x[ −n] − x[ n]) = − xod [ n].
Hence, x od [n] is an odd sequence.
Not for sale.
7
2.12 (a) g[ n] = x ev [ n]x ev [ n]. Thus, g[ −n] = x ev [ − n]x ev [ − n] = x ev [ n]x ev [ n] = g[ n]. Hence,
g[n] is an even sequence.
(b) u[ n] = x ev [ n]x od [ n]. Thus, u[ − n] = x ev [ − n]x od [ − n] = x ev [ n](− x od [ n]) = −u[ n].
Hence, u[n] is an odd sequence.
(c) v[ n] = x od [ n]x od [ n]. Thus, v[ −n] = x od [ − n]x od [ − n] = (− x od [ n])(− x od [ n])
= x od [ n]x od [ n] = v[ n]. Hence, v[n] is an even sequence.
2.13 (a) Since x[n] is causal, x[ n] = 0, n < 0. Also, x[ − n] = 0, n > 0. Now,
Hence, x ev [0] = (x[0] + x[0]) = x[0] and
2
⎧2 x ev [ n], n > 0,
⎪
1
x ev [ n] = x[ n], n > 0. Combining the two equations we get x[ n] = ⎨ x ev [ n], n = 0,
2
⎪⎩ 0,
n < 0.
x ev [ n] =
1
2
(x[ n] + x[ −n]).
Likewise, x od [ n] =
x od [ n] =
1
2
1
2
1
(x[ n] − x[−n]).
Hence, x od [0] =
1
2
(x[0] − x[0]) = 0
and
2 x [ n], n > 0,
x[ n], n > 0. Combining the two equations we get x[ n] = ⎧⎨ ev
n ≤ 0.
⎩ 0,
(b) Since y[n] is causal, y[ n] = 0, n < 0. Also, y[ − n] = 0, n > 0. Let
y[ n] = yre [ n] + jyim [ n], where yre [n] and yim [n] are real causal sequences.
1
(
)
1
(
)
Now, yca [ n] = y[ n] − y ∗ [ − n] . Hence, yca [0] = y[0] − y ∗ [0] = jyim [0] and
2
2
yca [ n] =
1
y[ n], n
2
> 0. Since yre [0] is not known, y[n] cannot be fully recovered from
yca [n] .
1
(
)
1
(
)
Likewise, ycs [ n] = y[ n] + y ∗ [ − n] . Hence, ycs [0] = y[0] + y ∗ [0] = yre [0] and
2
2
ycs [ n] =
1
y[ n], n
2
> 0. Since yim [ 0] is not known, y[n] cannot be fully recovered from
ycs [n] .
2.14 Since x[n] is causal, x[ n] = 0, n < 0. From the solution of Problem 2.13 we have
⎧2 x ev [ n], n > 0, ⎧2 cos(ωo n), n > 0,
⎪
⎪
1
n = 0, = 2 cos(ωo n)µ[ n] − δ[ n].
x[ n] = ⎨ x ev [ n], n = 0, = ⎨
0
,
n < 0,
⎪⎩ 0,
⎪
n < 0, ⎩
2.15 (a) {x[ n]} = {Aα n } where A and α are complex numbers with α < 1. Since for
n < 0, α
n
can become arbitrarily large, {x[ n]} is not a bounded sequence.
Not for sale.
8
⎧ n
(b) y[ n] = Aα n µ[ n] = ⎨ Aα , n ≥ 0, where A and α are complex numbers with
n < 0,
⎩ 0,
n
α < 1. Here, α ≤ 1, n ≥ 0. Hence y[ n] ≤ A for all values of n. Hence, {y[ n]} is a
bounded sequence.
(c) {h[ n]} = Cβ n µ[ n] where C and β are complex numbers with β > 1. Since for
n > 0, β
n
can become arbitrarily large, {h[ n]} is not a bounded sequence.
(d) {g[ n]} = 4 cos(ωo n). Since g[ n] ≤ 4 for all values of n,{g[ n]} is a bounded
sequence.
1
⎧⎛
1
1
⎪⎜1 − 2 ⎞⎟, n ≥ 1,
(e) v[ n] = ⎨⎝ n ⎠
Since 2 < 1 for n > 1 and 2 = 1 for n = 1, v[ n] < 1 for
n
n
⎪⎩ 0,
n ≤ 0.
all values of n. Thus {v[ n]} is a bounded sequence.
∞
∞ ( −1) n +1
∞ 1
(−1) n +1
µ[ n − 1]. Now ∑ x[ n] = ∑
= ∑
= ∞. Hence {x[ n]} is
2.16 x[ n] =
n
n
n = −∞
n =1
n =1 n
not absolutely summable.
∞
2.17 (a) x1[ n] = α n µ[ n − 1]. Now
∑
n = −∞
∞
∞
n =1
n =1
x 2 [ n] = ∑ α n = ∑ α
n
=
α
1− α
< ∞ , since
α < 1. Hence, {x1[ n]} is absolutely summable.
∞
(b) x 2 [ n] = α n µ[ n − 1]. Now
α
2
∑
n = −∞
∞
∞
n =1
n =1
x 2 [ n] = ∑ nα n = ∑ n α
n
α
=
(1 − α ) 2
< ∞, since
< 1. Hence, {x 2 [ n]} is absolutely summable.
(c) x 3 [ n] = n 2 α n µ[ n − 1]. Now
2
3
∞
∑
n = −∞
∞
∞
n =1
n =1
x 3 [ n] = ∑ n 2 α n = ∑ n 2 α
n
4
= α + 2 2 α + 32 α + 4 2 α + K
2
3
4
2
3
4
3
4
5
= ( α + α + α + α + K) + 3( α + α + α + K) + 5( α + α + α + K)
Not for sale.
9
4
5
6
+ 7( α + α + α + K) =
=
=
α
1− α
⎛ ∞
1
n⎞
⎜⎜ ∑ (2n − 1) α ⎟⎟ =
⎠ 1− α
⎝ n =1
1
1− α
α (1 + α )
(1 − α ) 3
+
3α
2
1− α
+
5α
3
7α
+
1− α
4
1− α
+K
∞
⎛ ∞
1
n
n⎞
⎜⎜ 2 ∑ n α − ∑ α ⎟⎟ =
n =1
⎠ 1− α
⎝ n =1
⎛ 2α
α
⎜
−
⎜ (1 − α ) 2 1 − α
⎝
⎞
⎟
⎟
⎠
< ∞. Hence, {x 3 [ n]} is absolutely summable.
∞
∞ 1
∞ 1
1
1
2.18 (a) x a [ n] =
= ∑
=
= 2 < ∞. Hence,
µ[ n]. Now ∑ x a [ n] = ∑
n
n
1
n = −∞
n=0 2
n=0 2
2n
1−
2
{x a [ n]} is absolutely summable.
∞
∞
1
1
µ[ n]. Now ∑ x b [ n] = ∑
(n + 1)(n + 2)
n = −∞
n = 0 (n + 1)(n + 2)
∞ ⎛ 1
1 ⎞ ⎛ 1⎞ ⎛1 1⎞ ⎛1 1⎞ ⎛1 1⎞
= ∑ ⎜
−
⎟ = ⎜1 − ⎟ + ⎜ − ⎟ + ⎜ − ⎟ + ⎜ − ⎟ + K = 1 < ∞. Hence,
2⎠ ⎝2 3⎠ ⎝3 4⎠ ⎝ 4 5⎠
n=0 ⎝ n + 1 n + 2 ⎠ ⎝
{x b [ n]} is absolutely summable.
(b) x b [ n] =
2.19 (a) A sequence x[n] is absolutely summable if
∞
∑
n = −∞
x[ n] < ∞. By Schwartz inequality
∞
⎞⎛ ∞
⎞
2 ⎛ ∞
x[ n] ≤ ⎜⎜ ∑ x[ n] ⎟⎟⎜⎜ ∑ x[ n] ⎟⎟ < ∞. Hence, an absolutely summable
n = −∞
⎝ n = −∞
⎠⎝ n = −∞
⎠
sequence is square summable and has thus finite energy.
we have
∑
1
n
Now consider the sequence x[ n] = µ[ n − 1]. The convergence of an infinite series can
be shown via the integral test. Let a n = f (x ), where a continuous, positive and
∞
∞
decreasing function is for all x ≥ 1. Then the series ∑ a n and the integral ∫ f ( x )dx
n =1
1
1
1
∞
∞
1
both converge or both diverge. For a n = , f ( x ) = . But ∫ dx = (ln x ) 1 = ∞ − 0 = ∞ .
n
x
x
1
∞
Hence,
∑
n = −∞
∞ 1
n =1 n
x[ n] = ∑
1
n
does not converge. As a result, x[ n] = µ[ n − 1] is not
absolutely summable.
Not for sale.
10
(b) To show that {x[ n]} is square-summable, we observe that here a n =
∞
1
n2
, and thus,
∞
∞ 1
1
⎛ 1⎞
f ( x ) = 2 . Now, ∫ 2 dx = ⎜ − ⎟ = − + 1 = 1. Hence, ∑ 2 converges, or in other
∞
x
⎝ x ⎠1
n =1 n
1x
1
1
1
n
words, x[ n] = µ[ n − 1] is square-summable.
2.20 See Problem 2.19, Part (a) solution.
2
∞
∞ ⎛ cos ω n ⎞
∞
cos ωc n
1
2
c
µ[ n − 1]. Now, ∑ x 2 [ n] = ∑ ⎜
2.21 x 2 [ n] =
. Since,
⎟ ≤ ∑
2
2
πn
n = −∞
n =1 ⎝ πn ⎠
n =1 π n
2
π 2 ∞ ⎛ cos ωc n ⎞
1
, ∑ ⎜
⎟ ≤ . Therefore x2 [ n] is square-summable.
∑ 2 =
6 n =1 ⎝ πn ⎠
6
n =1 n
∞
1
Using the integral test (See Problem 2.19, Part (a) solution) we now show that x2 [ n] is
cos ωc x
∞ cos ω x
πx
1
c
⋅ cos int(ωc x )
dx = ⋅
not absolutely summable. Now, ∫
πx
π cos ωc x
1
∞
where
1
∞ cos ω x
c
cos int is the cosine integral function. Since ∫
πx
diverges. Hence, x2 [ n] is not absolutely summable.
∞
cos ωc n
also
πn
n =1
dx diverges, ∑
1
∞
K
1
1
2
2
∑ x [ n] = lim
∑ x ev [ n] + x od [ n]
K → ∞ 2 K +1 n = − K
K → ∞ 2 K +1 K = −∞
(
2.22 Px = lim
(
)
)
K
1
2
2
∑ x ev [ n] + x od [ n] + 2 x ev [ n]x od [ n]
K → ∞ 2 K +1 n = − K
= lim
= Px ev + Px od +
K
1
1
lim
∑ x[ n] +
2 K → ∞ 2 K +1 n = − K
(
1
1⎛ K
x[ − n])(x[ n] − x[ −n])
∞
⎞
⋅ ⎜⎜ ∑ x 2 [ n ] − ∑ x 2 [ − n ] ⎟⎟ = Px + Px
= Px ev + Px od + lim
ev
od
+
K
2
1
2 ⎝ n=− K
n = −∞
⎠
K →∞
as
K
K
n = −K
n = −K
2
2
∑ x [ n] = ∑ x [ − n]. Now for the given sequence,
K
K 1 6
1
1
2
∑ x od [ n] = lim
∑ ⎛⎜ ⎞⎟
K → ∞ 2 K +1 n = − K
K → ∞ 2 K +1 n = 0 ⎝ 3 ⎠
Px od = lim
6
K
1
1
= ⎛⎜ ⎞⎟ lim
∑1
⎝ 3 ⎠ K → ∞ 2 K +1 n =0
6
K +1
1 1 6
1 ⎛ 1 ⎞6
1
= ⎛⎜ ⎞⎟ . Hence, Px = Px − Px
= ⎛⎜ ⎞⎟ lim
=
−
10
⎜ ⎟ .
ev
od
2 ⎝3⎠
⎝ 3 ⎠ K → ∞ 2 K +1 2 ⎝ 3 ⎠
Not for sale.
11
N −1
2
N −1
2.23 x[ n] = sin( 2 πkn / N ), 0 ≤ n ≤ N − 1. Now E x = ∑ x[ n] = ∑ sin 2 (2πkn / N )
n=0
=
1 N −1
∑ 1 − cos(4πkn / N )
2 n=0
(
) = N2 − 12
n=0
N −1
N −1
∑ cos(4πkn / N ). Let C = ∑ cos(4 πkn / N ) and
n=0
N −1
N −1
n=0
n=0
S = ∑ sin( 4 πkn / N ). Then C + jS = ∑ e − j 4 πkn / N =
∞
α
2.24 (a) x[ n] = A µ[ n]. Then E x a = ∑
n = −∞
2.25
1
n2
1− e
1 − e − j 4 πk / N
= 0. This implies
N
.
2
C = 0. Hence E x =
(b) x b [ n] =
n=0
− j 4 πkn
∞
2
x a [ n] = A 2 ∑ α 2 n =
∞
µ[ n − 1]. Then E x b ∑
n = −∞
2
A2
n=0
1− α
∞
∞
x b [ n] = ∑
1
2
n =1 n
= ∑
2
1
4
n =1 n
.
=
π4
.
90
(a) x1[ n] = (−1) n . Then average power
K
1
∑
K → ∞ 2 K +1 n = − K
Px1 = lim
∞
E x1 = ∑
1
(2 K + 1) = 1, and energy
K →∞ 2K + 1
∞
2
n = −∞
2
x1[ n] = lim
x1[ n] = ∑ 1 = ∞.
n = −∞
(b) x 2 [ n] = µ[ n]. Then average power
K
K
K +1 1
1
1
2
Px 2 = lim
= , and energy
∑ x 2 [ n] = lim
∑ 1 = lim
K → ∞ 2K + 1 n = −K
K →∞ 2K + 1 n = 0 K → ∞ 2K + 1 2
∞
E x2 = ∑
n = −∞
∞
2
x 2 [ n] = ∑ 1 = ∞.
n=0
(c) x 3 [ n] = nµ[ n]. Then average power
K
K
K ( K + 1)(2 K + 1)
1
1
2
2
Px 3 = lim
= ∞,
∑ x3 [ n] = lim
∑ n = lim
6
K → ∞ 2K + 1 n = −K
K → ∞ 2 K + 1 n =1
K →∞
∞
and energy E x 3 = ∑
n = −∞
2
∞
x3 [ n] = ∑ n 2 = ∞.
n=0
K
1
2
∑ x 4 [ n]
K → ∞ 2K + 1 n = −K
(d) x 4 [ n] = A0 e jω 0 n . Then average power Px 4 = lim
Not for sale.
12
2
K
K
1
1
1
jω n
2
= lim
⋅ A02 (2 K + 1) = A02 ,
∑ A0 e 0
∑ A0 = lim
K → ∞ 2K + 1 n = −K
K →∞ 2K + 1 n = −K
K →∞ 2K + 1
= lim
∞
and energy E x 3 = ∑
n = −∞
2
∞
x 3 [ n] = ∑
n = −∞
A0 e jω 0 n
2
∞
= ∑ A02 = ∞.
n = −∞
2 πn
(e) x 5 [ n] = A cos⎛⎜
+ φ ⎞⎟. Note x 5 [ n] is a periodic sequence. Then average power
M
⎠
⎝
Px 5 =
2
1 M −1
1 M −1
1 A 2 M −1⎛ ⎛ 4 πn
2 πn
2
⎞
+ 2 φ ⎞⎟ + 1⎟.
⋅
+ φ ⎞⎟ =
∑ ⎜ cos⎜
∑ A cos⎛⎜
∑ x 5 [ n] =
M
M
⎝
⎠
⎠
⎝
⎠
M n=0
M n=0
M 2 n=0 ⎝
M −1
M −1
4πn
4πn
Let C = ∑ cos⎛⎜
+ 2φ ⎞⎟ and S = ∑ cos⎛⎜
+ 2φ ⎞⎟. Then
M
M
⎠
⎠
⎝
⎝
n=0
n=0
j ⎛⎜
C + jS = ∑ e ⎝
n=0
M −1
4 πn
+ 2 φ ⎞⎟
M
⎠
=e
j 2φ
M −1
∑ e
j 4 πn / M
n =0
=e
j 2φ
⋅
1 − e j 4π
1 − e j 4π / M
= 0.
1 A 2 M −1 A 2
⋅
.
∑1 =
M 2 n=0
2
Since x 5 [ n] is a periodic sequence, it has infinite energy.
Hence C = 0. Therefore Px 5 =
2.26 In each of the following parts, N denotes the fundamental period and r is a positive
integer.
2π
x [ n] = 4 cos(2πn / 5). Here N and r must satisfy the relation
⋅ N = 2 πr.
(a) ~
1
5
Among all positive solutions for N and r , the smallest values are N = 5 and r = 1.
Hence the average power is given by
Px1 =
2
1 4
1 N −1 ~
2
2 πn ⎞
⎟ = 8.
∑ x1[ n] = ∑ 4 cos⎛⎜
⎝ 5 ⎠
N n=0
5 n=0
3π
x 2 [ n] = 3 cos(3πn / 5). Here N and r must satisfy the relation
(b) ~
⋅ N = 2πr.
5
Among all positive solutions for N and r , the smallest values are N = 10 and r = 3.
Hence the average power is given by
2
1 9
1 N −1 ~
2
3πn ⎞
⎛
Px 2 =
⎟ = 4 .5 .
∑ x 2 [ n] =
∑ 3 cos⎜
⎝ 5 ⎠
N n=0
10 n = 0
3π
(c) ~
x3 [ n] = 2 cos(3πn / 7). Here N and r must satisfy the relation
⋅ N = 2πr.
7
Among all positive solutions for N and r , the smallest values are N = 14 and r = 3.
Hence the average power is given by
2
1 13
1 N −1 ~
2
3πn ⎞
⎛
Px 3 =
⎟ = 2.
∑ x 3 [ n] =
∑ 2 cos⎜
⎝ 7 ⎠
N n=0
14 n = 0
Not for sale.
13
5π
x 4 [ n] = 4 cos(5πn / 3). Here N and r must satisfy the relation
(d) ~
⋅ N = 2 πr.
3
Among all positive solutions for N and r , the smallest values are N = 6 and r = 5.
Hence the average power is given by
2
1 5
1 N −1 ~
2
5πn ⎞
⎟ = 8.
∑ x 4 [ n] = ∑ 4 cos⎛⎜
⎝ 3 ⎠
N n=0
6 n=0
(e) ~
x 5 [ n] = 4 cos(2πn / 5) + 3 cos(3πn / 5). We first determine the fundamental period
Px 4 =
2π
N1 of cos( 2 πn / 5). Here N1 and r must satisfy the relation
⋅ N1 = 2 πr. Among all
5
positive solutions for N1 and r , the smallest values are N1 = 5 and r = 1. We next
determine the fundamental period N 2 of cos(3πn / 5). Here N 2 and r must satisfy the
3π
⋅ N2
5
= 2πr. Among all positive solutions for N 2 and r , the smallest values
are N 2 = 10 and r = 3. The fundamental period of ~
x 5 [ n] is then given by
relation
LCM ( N1 , N 2 ) = LCM (5,10) = 10.
Hence the average power is given by
2
1 4
1 N −1 ~
2
2 πn ⎞
3πn ⎞
⎛
⎛
Px 5 =
⎟ + 3 cos⎜
⎟
∑ x 5 [ n] =
∑ 4 cos⎜
⎝ 5 ⎠
⎝ 5 ⎠
N n=0
10 n = 0
11
11
1 ⎛ 11
3πn ⎞
2 πn ⎞
3πn ⎞ ⎞
2 πn ⎞
= ⎜⎜ ∑ 16 cos 2 ⎛⎜
⎟ ⎟ ≅ 8 + 4.5 + 0 = 12.5.
⎟ cos⎛⎜
⎟ + ∑ 24 cos⎛⎜
⎟ + ∑ 9 cos 2 ⎛⎜
⎝ 5 ⎠ ⎝ 5 ⎠ ⎟⎠
⎝ 5 ⎠ n=0
⎝ 5 ⎠ n=0
10 ⎝ n = 0
x6 [ n] = 4 cos(5πn / 3) + 3 cos(3πn / 5). We first determine the fundamental period
(f) ~
5π
N1 of cos( 5πn / 3). Here N1 and r must satisfy the relation
⋅ N1 = 2πr. Among all
3
positive solutions for N1 and r , the smallest values are N1 = 6 and r = 5. We next
determine the fundamental period N 2 of cos(3πn / 5). Here N 2 and r must satisfy the
3π
⋅ N2
5
= 2πr. Among all positive solutions for N 2 and r , the smallest values
are N 2 = 10 and r = 3. The fundamental period of ~
x6 [ n] is then given by
relation
LCM ( N1 , N 2 ) = LCM (6,10) = 30.
Hence the average power is given by
2
1 N −1 ~
1 29
2
5πn ⎞
3πn ⎞
⎛
⎛
Px 6 =
⎟ + 3 cos⎜
⎟
∑ x 6 [ n] =
∑ 4 cos⎜
⎝ 3 ⎠
⎝ 5 ⎠
N n=0
30 n = 0
29
30
⎞
1 ⎛ 29
⎜⎜ ∑ 16 cos 2 ⎛⎜ 5πn ⎞⎟ + ∑ 9 cos 2 ⎛⎜ 3πn ⎞⎟ + ∑ 24 cos⎛⎜ 5πn ⎞⎟ cos⎛⎜ 3πn ⎞⎟ ⎟⎟ ≅ 8 + 4.5 + 0 = 12.5.
=
⎝ 3 ⎠ ⎝ 5 ⎠⎠
⎝ 5 ⎠ n =0
⎝ 3 ⎠ n=0
30 ⎝ n = 0
2.27
∞
Now , from Eq. (2.38) we have ~
y[ n] = ∑ x[ n + kN ]. Therefore
k = −∞
Not for sale.
14
∞
~
y[ n + N ] = ∑ x[ n + kN + N ]. Substituting r = k + 1 we get
k = −∞
∞
~
y[ n + N ] = ∑ x[ n + rN ] = ~
y[ n]. Hence ~
y[ n] is a periodic sequence with a period N .
r = −∞
2.28
∞
x p [ n] in the range 0 ≤ n ≤ 4 is
(a) N = 5. Now ~
x p [ n] = ∑ x[ n + k 5]. The portion of ~
n = −∞
given by x[ n − 5] + x[ n] + x[ n + 5] = {0 0 − 4 5 1}
+ {− 2 − 3 0 2 0} + {0 0 0 0 0} = {− 2 − 3 − 4 7 1}, 0 ≤ n ≤ 4.
x p [ n] is given by {− 2 − 3 − 4 7 1}, 0 ≤ n ≤ 4.
Hence, one period of ~
∞
y p [ n] in the range 0 ≤ n ≤ 4 is given by
Now ~
y p [ n] = ∑ y[ n + k 5]. The portion of ~
n = −∞
y[ n − 5] + y[ n] + y[ n + 5] = {0 0 0 0 6}
+ {− 3 − 1 0 8 7} + {− 2 0 0 0 0} = {− 5 − 1 0 8 13}, 0 ≤ n ≤ 4.
y p [ n] is given by {− 5 − 1 0 8 13}, 0 ≤ n ≤ 4.
Hence, one period of ~
∞
~ [ n] in the range 0 ≤ n ≤ 4 is given by
~ [ n] = ∑
Now w
w[ n + k 5]. The portion of w
p
p
n = −∞
w[ n − 5] + w[ n] + w[ n + 5] = {0 0 0 0 0}
+ {0 0 3 2 2} + {− 1 0 − 2 5 0} = {− 1 0 1 7 2}, 0 ≤ n ≤ 4.
~ [ n] is given by {− 1 0 1 7 2}, 0 ≤ n ≤ 4.
Hence, one period of w
p
∞
x p [ n] in the range 0 ≤ n ≤ 6 is
(b) N = 7. Now ~
x p [ n] = ∑ x[ n + k 7]. The portion of ~
n = −∞
given by x[ n − 7] + x[ n] + x[ n + 7] = {0 0 0 0 − 4 5 1}
+ {− 2 − 3 0 2 0 0 0} + {0 0 0 0 0 0 0}
= {− 2 − 3 0 2 − 4 5 1}, 0 ≤ n ≤ 6. Hence, one period of ~
x p [ n] is given by
{− 2 − 3 0 2 − 4 5 1}, 0 ≤ n ≤ 6.
∞
y p [ n] in the range 0 ≤ n ≤ 6 is given by
Now ~
y p [ n] = ∑ y[ n + k 7]. The portion of ~
n = −∞
x[ n − 7] + x[ n] + x[ n + 7] = {0 0 0 0 0 0 6}
+ {− 3 − 1 0 8 7 − 2 0} + {0 0 0 0 0 0 0}
= {− 3 − 1 0 8 7 − 2 6}, 0 ≤ n ≤ 6. Hence, one period of ~
y p [ n] is given by
{− 3 − 1 0 8 7 − 2 6}, 0 ≤ n ≤ 6.
∞
~ [ n] in the range 0 ≤ n ≤ 6 is given by
~ [ n] = ∑
Now w
w[ n + k 7]. The portion of w
p
p
n = −∞
w[ n − 7] + w[ n] + w[ n + 7] = {0 0 0 0 0 0 0}
+ {0 0 3 2 2 − 1 0} + {− 2 5 0 0 0 0 0}
Not for sale.
15
2.29
~ [ n] is given by
= {− 2 5 3 2 2 − 1 0}, 0 ≤ n ≤ 6. Hence, one period of w
p
{− 2 5 3 2 2 − 1 0}, 0 ≤ n ≤ 6.
~
x[ n] = A cos(ωo n + φ).
x[ n] = {1 − 1 − 1 1 1 − 1 − 1 1}. Hence A = 2 , ω = π / 2, φ = π / 4.
(a) ~
o
(b) ~
x[ n] = {0 − 3 0
3 0 − 3 0
3}. Hence A = 3 , ωo = π / 2,
φ = π / 2.
x[ n] = {1 − 0.366 − 1.366 − 1 0.366 1.366}. Hence A = 2 , ωo = π / 3,
(c) ~
φ = π / 4.
x[ n] = {2 0 − 2 0 2 0 − 2 0}. Hence A = 2, ωo = π / 2, φ = 0.
(d) ~
2.30
The fundamental period N of a periodic sequence with an angular frequency ω o
satisfies Eq. (2.47a) with the smallest value of N and r .
(a) ωo = 0.5π. Here Eq. (2.47a) reduces to 0.5πN = 2πr which is satisfied with
N = 4, r = 1.
(b) ωo = 0.8π. Here Eq. (2.47a) reduces to 0.8πN = 2πr which is satisfied with
N = 5, r = 2.
(c) We first determine the fundamental period N1 of Re{e jπn / 5} = cos(0.2πn). In
this case, Eq. (2.47a) reduces to 0.2πN 1= 2πr1 which is satisfied with N1 = 10, r1 = 1.
We next determine the fundamental period N 2 of Im{e jπn / 10 = j sin(0.1πn). In this
case, Eq. (2.47a) reduces to 0.1πN 2 = 2πr2 which is satisfied with N 2 = 20, r2 = 1.
Hence the fundamental period N of ~
x c [ n] is given by
LCM ( N1 , N 2 ) = LCM (10,20) = 20.
(d) We first determine the fundamental period N1 of 3 cos(1.3πn). In this case, Eq.
(2.47a) reduces to 1.3πN 1= 2πr1 which is satisfied with N1 = 20, r1 = 13. We next
determine the fundamental period N 2 of 4 sin( 0.5πn + 0.5π). In this case, Eq. (2.47a)
reduces to 0.5πN 2 = 2πr2 which is satisfied with N 2 = 4, r2 = 1. Hence the
x 4 [ n] is given by LCM ( N1 , N 2 ) = LCM (20,4) = 20.
fundamental period N of ~
(e) We first determine the fundamental period N1 of 5 cos(1.5πn + 0.75π). In this
case, Eq. (2.47a) reduces to 1.5πN 1= 2πr1 which is satisfied with N1 = 4, r1 = 3. We
next determine the fundamental period N 2 of 4 cos( 0.6 πn). In this case, Eq. (2.47a)
reduces to 0.6πN 2 = 2πr2 which is satisfied with N 2 = 10, r2 = 3. We finally
determine the fundamental period N 3 of sin( 0.5πn). In this case, Eq. (2.47a) reduces
to 0.5πN 3= 2πr3 which is satisfied with N 3 = 4, r3 = 1. Hence the fundamental period
x 5 [ n] is given by LCM ( N1 , N 2 , N 3 ) = LCM (4,10,4) = 20.
N of ~
2.31
The fundamental period N of a periodic sequence with an angular frequency ω o
satisfies Eq. (2.47a) with the smallest value of N and r .
Not for sale.
16
(a) ωo = 0.6π. Here Eq. (2.47a) reduces to 0.6πN = 2πr which is satisfied with
N = 10, r = 3.
(b) ωo = 0.28π. Here Eq. (2.47a) reduces to 0.28πN = 2πr which is satisfied with
N = 50, r = 7.
(c) ωo = 0.45π. Here Eq. (2.47a) reduces to 0.45πN = 2πr which is satisfied with
N = 40, r = 9.
(d) ωo = 0.55π. Here Eq. (2.47a) reduces to 0.55πN = 2πr which is satisfied with
N = 40, r = 11.
(e) ωo = 0.65π. Here Eq. (2.47a) reduces to 0.65πN = 2πr which is satisfied with
N = 40, r = 13.
2.32
ωo = 0.08π. Here Eq. (2.47a) reduces to 0.08πN = 2πr which is satisfied with
x 2 [ n] = sin(ω2 n) with a fundamental period of N = 25 ,
N = 25, r = 1. For a sequence ~
Eq. (2.47a) reduces to 25ω2 = 2πr. For example, for r = 2 we have
ω2 = 4π / 25 = 0.16π. Another sequence with the same fundamental period is obtained
by setting r = 3 which leads to ω3 = 6π / 25 = 0.24 π. The corresponding periodic
x [ n] = sin(0.16πn) and ~
x [ n] = sin(0.24 πn).
sequences are therefore ~
2
2.33
3
The three parameters A, Ω o , and φ of the continuous-time signal x a (t ) can be
determined from x[ n] = x a (nT ) = A cos(Ω o nT + φ) by setting 3 distinct values of n.
For example
x[ 0] = A cos φ = α,
x[ −1] = A cos(−Ω o T + φ) = A cos(Ω o T ) cos φ + A sin(Ω o T ) sin φ = β, ,
x[1] = A cos(Ω o T + φ) = A cos(Ω o T ) cos φ − A sin(Ω o T ) sin φ = γ.
Substituting the first equation into the last two equations and then adding them we get
β+γ
which can be solved to determine Ω o . Next, from the second
cos(Ω o T ) =
2α
equation we have A sin φ = β − A cos(Ω o T ) cos φ = β − α cos(Ω o T ). Dividing this
β − α cos(Ω o T )
equation by the last equation on the previous page we arrive at tan φ =
α sin(Ω o T
which can be solved to determine φ. Finally, the parameter is determined from the first
equation of the last page.
Not for sale.
17
2π
= 2Ω o . In this case x[ n] = A cos( nπ + φ) = β and
T
x[ n + 1] = A cos((n + 1)π + φ) = A cos(nπ + φ) = β . Since all sample values are equal, the
three parameters cannot be determined uniquely.
Now consider the case Ω T =
2π
< 2Ω o . In this case x[ n] = A cos(Ω o nT + φ)
T
= A cos(ωo n + φ) implying ωo = Ω o T > π. As explained in Section 2.2.1, a digital
Finally consider the case Ω T =
sinusoidal sequence with an angular frequency ω o greater than π assumes the identity
of a sinusoidal sequence with an angular frequency in the range 0 ≤ ω < π. . Hence,
Ω o cannot be uniquely determined from x[ n] = A cos(Ω o nT + φ) .
2.34
x[ n] = cos(Ω o nT ). If x[n] is periodic with a period N , then
x[ n + N ] = cos(Ω 0 nT + Ω 0 NT ) = x[ n] = cos(Ω 0 nT ). This implies Ω o NT = 2πr with
r any nonzero positive integer. Hence the sampling rate must satisfy the relation
π
T = 2πr / Ω o N . If Ω o = 20, i.e., T = π / 8, then we must have 20 N ⋅ = 2 πr . The
8
smallest value of N and r satisfying this relation are N = 4 and r = 5. The
fundamental period is thus N = 4 .
2.35
(a) For an input xi [ n], i = 1,2, the output is
yi [ n] = b0 xi [ n] + b1 xi [ n − 1] + b2 xi [ n − 2] + a1 yi [ n − 1] + a 2 yi [ n − 2], i = 1,2. Then, for
an input x[ n] = Ax1[ n] + Bx2 [ n], the output is y[ n] = b0 ( Ax1[ n] + Bx 2 [ n])
+ b1 ( Ax1[ n − 1] + Bx2 [ n − 1]) + b2 ( Ax1[ n − 2] + Bx2 [ n − 2]) + a1 ( Ay1[ n − 1] + By2 [ n − 1])
+ a1 ( Ay1[ n − 2] + By2 [ n − 2]) = A(b0 x1[ n] + b1 x1[ n − 1] + b2 x1[ n − 2] + a1 y1[ n − 1]
+ a 2 y2 [ n − 1]) + B(b1 x 2 [ n] + b2 x 2 [ n − 1] + b3 x 2 [ n − 2] + a1 x 2 [ n − 1] + a 2 x 2 [ n − 2])
= Ay1[ n] + By2 [ n]. Hence, the system of Eq. (2.18) is linear.
⎧ x [ n / L ], n = 0, ± L, ± 2 L,L
(b) For an input xi [ n], i = 1,2, the output is yi [ n] = ⎨ i
otherwise.
⎩ 0,
For an input x[ n] = Ax1[ n] + Bx2 [ n], the output for n = 0, ± L, ± 2 L,K is
y[ n] = x[ n / L ] = Ax1[ n / L ] + Bx2 [ n / L ] = Ay1[ n] + By2 [ n] . For all other values of
n, y[ n] = A ⋅ 0 + B ⋅ 0 = 0. Hence the system of Eq. (2.20) is linear.
(c) For an input xi [ n], i = 1,2, the output is yi [ n] = x i [ n / M ], i = 1,2. Then, for an input
x[ n] = Ax1[ n] + Bx2 [ n], the output is y[ n] = Ax1[ n / M ] + Bx2 [ n / M ] = Ay1[ n] + By 2 [ n].
Hence the system of Eq. (2.21) is linear.
Not for sale.
18
(d) For an input xi [ n], i = 1,2, the output is yi [ n] =
1 M −1
∑ xi [ n − k ], i = 1,2. Then, for
M k =0
an input x[ n] = Ax1[ n] + Bx2 [ n], the output is y[ n] =
1 M −1
∑ ( Ax1[ n − k ] + Bx 2 [ n − k ])
M k =0
⎞
⎛ 1 M −1
⎞
⎛ 1 M −1
= A⎜⎜
∑ x 2 [ n − k ] ⎟⎟ = Ay1[ n] + By2 [ n]. Hence the system of
∑ x1[ n − k ] ⎟⎟ + B⎜⎜
⎠
⎝ M k =0
⎠
⎝ M k =0
Eq. (2.61) is linear.
(e) The first term on the RHS of Eq. (2.65) is the output of a factor-of-2 up-sampler.
The second term on the RHS of Eq. (2.65) is simply the output of an unit delay
followed by a factor-of-2 up-sampler, whereas, the third term is the output of an unit
advance operator followed by a factor-of-2 up-sampler. We have shown in Part (b) that
the up-sampler is a linear system. Moreover, the unit delay and the unit advance
operator are linear systems. A cascade of two linear systems is linear and the linear
combination of linear systems is also linear. Hence, the factor-of-2 interpolator of Eq.
(2.65) is a linear system.
(f) Following the arguments given in Part (e), we can similarly show that the factor-of3 interpolator of Eq. (2.66) is a linear system.
2.36
(a) y[ n] = n 3 x[ n]. For an input xi [ n], i = 1,2, the output is yi [ n] = n 3 x i [ n], i = 1,2.
Then, for an input x[ n] = Ax1[ n] + Bx2 [ n], the output is y[ n] = n 3 ( Ax1[ n] + Bx 2 [ n])
= Ay1[ n] + By2 [ n]. Hence the system is linear.
For an input x[ n] = δ[ n], the output is the impulse response h[ n] = n 3 δ[ n]. As
h[ n] = 0 for n < 0, and the system is causal.
Let x[ n] = 1 for all values of n. Then y[ n] = n 3 and y[n] → ∞ as n → ∞. Since a
bounded input results in an unbounded output, the system is not BIBO stable.
Finally, let y[n] and y1[ n] be the outputs for inputs x[n] and x1[ n], respectively. If
x1[ n] = x[ n − no ] then y1[ n] = n 3 x1[ n] = n 3 x[ n − no ]. However, y[ n − no ] =
( n − n o ) 3 x[ n − n o ]. Since y1[ n] ≠ y[ n − no ], the system is not time-invariant.
(b) y[ n] = ( x[ n]) 5 . For an input xi [ n], i = 1,2, the output is yi [ n] = ( x i [ n]) 5 , i = 1,2.
Then, for an input x[ n] = Ax1[ n] + Bx2 [ n], the output is y[ n] = ( Ax1[ n] + Bx 2 [ n])5
≠ A( x1 [ n]) 5 + B( x 2 [ n]) 5 . Hence the system is nonlinear.
For an input x[ n] = δ[ n], the output is the impulse response h[ n] = (δ[ n]) 5 . As
h[ n] = 0 for n < 0, and the system is causal.
Not for sale.
19
For a bounded input x[ n] ≤ B < ∞, the magnitude of the output samples are
5
y[ n] = ( x[ n]) 5 = x[ n] ≤ B 5 < ∞. As the output is also a bounded sequence, the
system is BIBO stable.
Finally, let y[n] and y1[ n] be the outputs for inputs x[n] and x1[ n], respectively. If
x1[ n] = x[ n − no ] then y1[ n] = ( x 1 [ n]) 5 = (x[ n − no ])5 = y[ n − no ]. Hence, the system
is time-invariant.
3
(c) y[ n] = β + ∑ x[ n − l] with β a nonzero constant. For an input xi [ n], i = 1,2, the
l=0
3
output is yi [ n] = β + ∑ x i [ n − l], i = 1,2. Then, for an input x[ n] = Ax1[ n] + Bx2 [ n],
l =0
3
3
3
l =0
l =0
l=0
the output is y[ n] = β + ∑ ( Ax1[ n − l] + Bx 2 [ n − l]) = β + ∑ Ax1[ n − l] + ∑ Bx 2 [ n − l]
≠ Ay1[ n] + By2 [ n]. Hence the system is nonlinear.
∞
For an input x[ n] = δ[ n], the output is the impulse response h[ n] = β + ∑ δ[ n − l]. As
l=0
h[ n] ≠ 0 for n < 0, the system is noncausal.
For a bounded input x[ n] ≤ B < ∞, the magnitude of the output samples are
y[ n] ≤ β + 4 B < ∞. As the output is also a bounded sequence, the system is BIBO
stable.
Finally, let y[n] and y1[ n] be the outputs for inputs x[n] and x1[ n], respectively. If
3
x1[ n] = x[ n − no ] then y1[ n] = β + ∑ x[ n −n o −l] = y[ n − no ]. Hence, the system is
l=0
time-invariant.
(d) y[ n] = ln(2 + x[ n] ). For an input xi [ n], i = 1,2, the output is yi [ n] = ln(2 + xi [ n] ),
i = 1,2. Then, for an input x[ n] = Ax1[ n] + Bx2 [ n], the output is
y[ n] = ln (2 + Ax1[ n] + Bx2 [ n] ) ≠ Ay1[ n] + By2 [ n]. Hence the system is nonlinear.
For an input x[ n] = δ[ n], the output is the impulse response h[ n] + ln(2 + δ[ n] ) .
For n < 0, h[ n] = ln(2) ≠ 0. Hence, the system is noncausal.
For a bounded input x[ n] ≤ B < ∞, the magnitude of the output samples are
y[ n] ≤ ln(2 + B ) < ∞. As the output is also a bounded sequence, the system is BIBO
stable.
Finally, let y[n] and y1[ n] be the outputs for inputs x[n] and x1[ n], respectively. If
Not for sale.
20
x1[ n] = x[ n − no ] then y1[ n] = ln(2 + x[ n − no ] ) = y[ n −n o ]. Hence, the system is
time-invariant.
(e) y[ n] = αx[ − n + 2], with a nonzero constant. For an input xi [ n], i = 1,2, the output
is yi [ n] = αxi [ −n + 2], i = 1,2. Then, for an input x[ n] = Ax1[ n] + Bx2 [ n], the output is
y[ n] = Aαx1[ −n + 2] + Bαx 2 [ −n + 2] = Ay1[ n] + By2 [ n]. Hence the system is linear.
For an input x[ n] = δ[ n], the output is the impulse response h[ n] = αδ[ −n + 2]. For
n < 0, h[ n] = 0. Hence, the system is causal.
For a bounded input x[ n] ≤ B < ∞, the magnitude of the output samples are
y[ n] = αB < ∞. As the output is also a bounded sequence, the system is BIBO stable.
Finally, let y[n] and y1[ n] be the outputs for inputs x[n] and x1[ n], respectively. If
x1[ n] = x[ n − no ] then y1[ n] = αx1[ − n + 2] = αx[ −(n − no ) + 2] = y[ n −n o ]. Hence, the
system is time-invariant.
(f) y[ n] = x[ n − 4]. For an input xi [ n], i = 1,2, the output is yi [ n] = xi [ n − 4], i = 1,2.
Then, for an input x[ n] = Ax1[ n] + Bx2 [ n], the output is y[ n] = Ax1[ n − 4] + Bx2 [ n − 4]
= Ay1 [ n] + By2 [ n]. Hence the system is linear.
For an input x[ n] = δ[ n], the output is the impulse response h[ n] = δ[ n − 4]. For n < 0,
h[ n] = 0. Hence, the system is causal.
For a bounded input x[ n] ≤ B < ∞, the magnitude of the output samples are
y[ n] = B < ∞. As the output is also a bounded sequence, the system is BIBO stable.
Finally, let y[n] and y1[ n] be the outputs for inputs x[n] and x1[ n], respectively. If
x1[ n] = x[ n − no ] then y1[ n] = x[ n −n o −4] = y[ n − no ]. Hence, the system is timeinvariant.
2.37
Let y[n] and y1[ n] be the outputs of a median filter of length 2 K + 1 for inputs x[n]
and x1[ n] , respectively. If x1 [ n] = x[ n − no ] , then
y1[ n] = med{x1[ n − K ], K, x1[ n − 1], x1[ n], x1[ n + 1], K, x1[ n + K ]}
= med{x[ n − no − K ], K, x[ n − no − 1], x[ n − no ], x[ n − no + 1], K, x[ n − no + K ]}
= y[ n − no ]. Hence, the system is time-invariant.
2.38
y[ n] = x[ n + 1] − 2 x[ n] + x[ n − 1]. For an input x i [ n], i = 1,2, the output is
yi [ n] = x i [ n + 1] − 2 xi [ n] + xi [ n − 1], i = 1,2. Then, for an input x[ n] = Ax1[ n] + Bx2 [ n],
the output is
y[ n] = Ax1[ n + 1] + Bx 2 [ n + 1] − 2 Ax1[ n] − 2 Bx 2 [ n] + Ax1[ n − 1] + Bx 2 [ n − 1]
= Ay1[ n] + By2 [ n]. Hence the system is linear.
If x1[ n] = x[ n − no ], then y1[ n] = x[ n − no + 1] − 2 x[ n − no ] + x[ −no n − 1] = y[ n − no ].
Hence, the system is time-invariant.
Not for sale.
21
The impulse response of the system is h[ n] = δ[ n + 1] − 2δ[ n] + δ[ n − 1] . Now
h[ −1] = δ[0] = 1. Since h[ n] ≠ 0 for all values of n < 0, the system is noncausal.
2.39
y[ n] = x 2 [ n] − x[ n − 1]x[ n + 1]. For an input xi [ n], i = 1,2, the output is
yi [ n] = x i2 [ n] − x i [ n − 1]x i [ n + 1], i = 1,2. Then, for an input x[ n] = Ax1[ n] + Bx2 [ n], the
output is y[ n] = ( Ax1[ n] + Bx 2 [ n])2 − ( Ax1[ n − 1] + Bx 2 [ n − 1])( Ax1[ n + 1] + Bx 2 [ n + 1])
≠ Ay1[ n] + By2 [ n]. Hence the system is nonlinear.
If x1[ n] = x[ n − no ], then y1[ n] = x12 [ n] − x1[ n − 1]x1[ n + 1]
= x 2 [ n − no ] − x[ n − no − 1] x[ n − no + 1] = y[ n − no ]. Hence, the system is timeinvariant.
The impulse response of the system is h[ n] = δ 2 [ n] − δ[ n − 1]δ[ n + 1] = δ[ n]. Since
h[ n] = 0 for all values of n < 0, the system is causal.
2.40
1⎛
x[ n] ⎞
⎜⎜ y[ n − 1] +
⎟. Now for an input x[ n] = αµ[ n], the output y[n]
2⎝
y[ n − 1] ⎟⎠
converges to some constant K as n → ∞. The input-output relation of the system as
α⎞
1⎛
n → ∞ reduces to K = ⎜ K + ⎟ from which we get K 2 = α or in other words
2⎝
K⎠
K = α.
x [ n] ⎞
1⎛
⎟, i = 1,2. Then,
For an input xi [ n], i = 1,2, the output is y i [ n] = ⎜⎜ yi [ n − 1] + i
2⎝
yi [ n − 1] ⎟⎠
y[ n] =
for an input x[ n] = Ax1[ n] + Bx2 [ n], the output is y[ n] =
Ax [ n] + Bx 2 [ n] ⎞
1⎛
⎜⎜ y[ n − 1] + 1
⎟⎟.
y[ n − 1]
2⎝
⎠
On the other hand,
Bx 2 [ n] ⎞
Ax1 [ n] ⎞ 1 ⎛
1⎛
⎟ ≠ y[ n].
⎟⎟ + ⎜⎜ By 2 [ n − 1] +
⎜⎜ Ay1 [ n − 1] +
y 2 [ n − 1] ⎟⎠
y1 [ n − 1] ⎠ 2 ⎝
2⎝
Hence the system is nonlinear.
x[ n − no ] ⎞
1⎛
⎟ = y[ n − no ]. Hence, the
If x1[ n] = x[ n − no ], then y1[ n] = ⎜⎜ y1[ n − 1] +
y1[ n − 1] ⎟⎠
2⎝
system is time-invariant.
Ay1[ n] + By2 [ n] =
2.41
y[ n] = x[ n] − y 2 [ n − 1] + y[ n − 1].
For an input xi [ n], i = 1,2, the output is yi [ n] = x i [ n] − yi2 [ n − 1] + yi [ n − 1], i = 1,2.
Then, for an input x[ n] = Ax1[ n] + Bx2 [ n], the output is
y[ n] = Ax1[ n] + Bx 2 [ n] − y 2 [ n − 1] + y[ n − 1]. On the other hand, Ay1[ n] + By2 [ n]
Not for sale.
22
= Ax1[ n] − Ay12 [ n − 1] + Ay1[ n − 1] + Bx 2 [ n] − By22 [ n − 1] + By2 [ n − 1] ≠ y[ n]. Hence the
system is nonlinear.
Let y[n] be the output for an input x[n] , i.e., y[n] = x[n] − y 2 [n] + y[n − 1]. Then, for an
input x[n − no ] the output is given by y[ n − n o ] = x[ n − n o ] − y 2 [ n − n o −1] + [ n − n o −1] , or
in other words, the system is time-invariant.
Now, for an input x[ n] = αµ[ n] , the output y[n] converges to some constant K as n → ∞ .
The difference equation describing the system as n → ∞ reduces to K = α − K 2 + K , or
K 2 = α, i.e., K = α .
2.42
The impulse response of the factor-of-3 interpolator of Eq. (2.66) is the output for an
input x u [ n] = δ[ n] and is given by
2
3
2
, 1,
3
1
3
h[ n] = δ[ n] + (δ[ n − 1] + δ[ n + 1]) + (δ[ n − 2] + δ[ n + 2]) or equivalently by
{h[ n]} =
2.43
{
1
,
3
2
,
3
}
1
, − 2 ≤ n ≤ 2.
3
The input-output relation of a factor-of- L interpolator is given by
L −1 L − k
(xu [ n − k ] + xu [ n + k ]). Its impulse response is the output for
y[ n] = xu [ n] + ∑
k =1 L
L −1 L − k
an input xu [ n] = δ[ n] and is thus given by h[ n] = δ[ n] + ∑
{,
k =1
L
K,
2
,
L
(δ[ n − k ] + δ[ n + k ])
or equivalently by
{h[ n]} =
2.44
1
L
2
,
L
K,
L −2
,
L
L −1
,
L
1,
L −1
,
L
L −2
,
L
1
L
}, − L + 1 ≤ n ≤ L − 1.
The impulse response h[n] of a causal discrete-time system satisfies the difference
equation h[ n] − a h[ n − 1] = δ[ n]. Since the system is causal, we have h[ n] = 0 for
n < 0. Evaluating the above difference equation for n = 0, we arrive at
h[0] − ah[ −1] = 1 and thus h[0] = 1. Next, for n = 1 , we have h[1] − a h[ 0] = 0 and thus
h[1] = a. Continuing we get for n = 2, h[ 2] − ah[1] = 0 , i.e., h[2] = ah[1] = a 2 . Assume
h[ n − 1] = a n −1 with n > 0. From the difference equation we then have
h[ n] − a h[ n − 1] = 0 , i.e., h[ n] = ah[ n − 1] = a n . Since the last equation holds for
n = 0,1, 2, by induction, it holds for n ≥ 3.
2.45
As x[n] and h[n] are right-sided sequences, assume x[ n] = 0 for all n < N1 and
h[ n] = 0 and n < N 2 . Hence, y[ n] = h[ n] O
* x[ n] = 0 for all n < N1 + N 2 and thus
Not for sale.
23
∞
y[n] is also a right-sided sequence. Therefore,
=
∞
∞
∞
n = N1 + N 2 k = N 2
∞
n = N1 + N 2
∞
* x[ n]
∑ h[ n] O
n = N1 + N 2
∞
∑ h[ k ]x[ n − k ] = ∑ h[ k ]
k = N 2 n = N1 + N 2
∞
∞
∞
m = N1 + N 2 − k
k = N2
m = N1
k =N2
∞
∑ x[ n − k ]
n = N1 + N 2
∑ x[ m] = ∑ h[ k ] ∑ x[ m] as x[ m] = 0 for all m < N1 . Hence,
= ∑ h[ k ]
k = N2
∞
∑ h[ k ]x[ n − k ] = ∑
∑
∑ y[ n] =
⎞
⎞⎛
⎛
∑ y[ n] =⎜⎜ ∑ h[ n] ⎟⎟⎜⎜ ∑ x[ n] ⎟⎟.
n
⎠
⎠⎝ n
⎝n
2.46
2.47
∞
∞
⎧∑ n α k , n ≥ 0,
k
k
(a) α n µ[n] O
* µ[n] = ∑ α µ[k ]µ[n − k ] = ∑ α µ[n − k ] = ⎨ k = 0
0,
n < 0,
k = −∞
k =0
⎩
⎛ 1 − α n +1 ⎞
⎟µ[n].
=⎜
⎜ 1− α ⎟
⎠
⎝
∞
∞
⎧∑ n kα k , n > 0,
k
k
(b) nα n µ[ n] O
* µ[ n] = ∑ kα µ[ k ]µ[ n − k ] = ∑ kα µ[ n − k ] = ⎨ k = 0
0,
n ≤ 0.
k = −∞
k =0
⎩
Now from Eq. (2.72) an arbitrary input x[n] can be expressed as
∞
x[ n] = ∑ x[ k ]δ[ n − k ] which can be rewritten using Eq. (2.41b) as
k = −∞
∞
∞
∞
k = −∞
k = −∞
k = −∞
x[ n] = ∑ x[ k ](µ[ n − k ] − µ[ n − k − 1]) = ∑ x[ k ]µ[ n − k ] − ∑ x[ k ]µ[ n − k − 1].
Since s[n] is the response of an LTI system for an input µ[n], s[ n − k ] is the response
for an input µ[ n − k ] and s[ n − k − 1] is the response for an input µ[ n − k − 1]. Hence,
the output for an input
∞
∞
∞
k = −∞
∞
k = −∞
∑ x[ k ]µ[ n − k ] − ∑ x[ k ]µ[ n − k − 1] is given by
* s[ n] − x[ n − 1] O
* s[ n − 1].
y[ n] = ∑ x[ k ]s[ n − k ] − ∑ x[ k ]s[ n − k − 1] = x[ n] O
k = −∞
2.48
y[ n] =
k = −∞
∞
x[ n − m]. Hence,
∑ h[ m]~
m = −∞
y[ n + kN ] =
∞
x[ n + kN − m] =
∑ h[ m ]~
m = −∞
∞
∑ h[ m]x[ n − m] = y[ n]. Thus, y[n] is also a
m = −∞
periodic sequence with a period N .
2.49
In this problem we make use of the identity δ[ n − m ] O
* δ[ n − r ] = δ[ n − m − r ].
Not for sale.
24
(a) y1[ n] = x1[ n] O
* h1[ n] = (3δ[ n − 2] − 2δ[ n + 1]) O
* (− δ[ n + 2] + 4δ[ n] + 2δ[ n − 1])
= −3δ[ n − 2] O
* δ[ n + 2]
* δ[ n + 2] + 12δ[ n − 2] O
* δ[ n] − 6δ[ n − 2] O
* δ[ n − 1] + 2δ[ n + 1] O
− 8δ[ n + 1] O
* δ[ n] + 4δ[ n + 1] O
* δ[ n − 1] . Hence
y1[ n] = −3δ[ n] + 12δ[ n − 2] − 6δ[ n − 3] + 2δ[ n + 3] − 8δ[ n + 1] + 4δ[ n]
= 2δ[ n + 3] − 8δ[ n + 1] + δ[ n] + 12δ[ n − 2] − 6δ[ n − 3].
(b) y 2 [ n] = x 2 [ n] O
* h2 [ n] = (5δ[ n − 3] + 2δ[ n + 1]) O
* (3δ[ n − 4] + 1.5δ[ n − 2] − δ[ n + 1])
= 15δ[ n − 3] O
* δ[ n − 4] + 7.5δ[ n − 3] O
* δ[ n − 2] − 5δ[ n − 3] O
* δ[ n + 1] + 6δ[ n + 1] O
* δ[ n − 4]
+ 3δ[ n + 1] O
* δ[ n − 2] − 2δ[ n + 1] O
* δ[ n + 1] = 15δ[ n − 7] + 7.5δ[ n − 5] − 5δ[ n − 2]
+ 6δ[ n − 3] + 3δ[ n − 1] − 2δ[ n + 2].
(c) y3 [ n] = x1[ n] O
* h2 [ n] = (− 3δ[ n − 2] − 2δ[ n + 1]) O
* (3δ[ n − 4] + 1.5δ[ n − 2] − δ[ n + 1])
= 9δ[ n − 2] O
* δ[ n − 4] + 4.5δ[ n − 2] O
* δ[ n − 2] − 3δ[ n − 2] O
* δ[ n + 1] − 6δ[ n + 1] O
* δ[ n − 4]
− 3δ[ n + 1] O
* δ[ n − 2] + 2δ[ n + 1] O
* δ[ n + 1] = 9δ[ n − 6] + 4.5δ[ n − 4] − 3δ[ n − 1]
− 6δ[ n − 3] − 3δ[ n − 1] − 3δ[ n − 1] + 2δ[ n + 2] = 2δ[ n + 2] − 6δ[ n − 1] − 6δ[ n − 3]
+ 4.5δ[ n − 4] + 9δ[ n − 6].
(d) y 4 [ n] = x 2 [ n] O
* h1[ n] = (5δ[ n − 3] + 2δ[ n + 1]) O
* (− δ[ n + 2] + 4δ[ n] − 2δ[ n − 1])
= −5δ[ n − 3] O
* δ[ n + 2] + 20δ[ n − 3] O
* δ[ n] − 10δ[ n − 3] O
* δ[ n − 1] − 2δ[ n + 1] O
* δ[ n + 2]
+ 8δ[ n + 1] O
* δ[ n] − 4δ[ n + 1] O
* δ[ n − 1] = −5δ[ n − 1] + 20δ[ n − 3] − 10δ[ n − 4] − 2δ[ n + 3]
+ 8δ[ n + 1] − 4δ[ n] = −2δ[ n + 3] + 8δ[ n + 1] − 4δ[ n] − 5δ[ n − 1] + 20δ[ n − 3] − 10δ[ n − 4].
2.50
(a) u[ n] = x[ n] O
* y[ n]
= {− 24, 42, − 5, − 20, − 45, 23, 66, − 25, − 42, − 17, 22, 14, − 4}, − 4 ≤ n ≤ 8.
(b) v[ n] = x[ n] O
* w[ n]
= {− 12, 7, 5, 10, − 16, − 3, − 28, 30, 13, − 6, − 15, − 4, 10}, − 1 ≤ n ≤ 11.
(c) g[ n] = w[ n] O
* y[ n]
= {18, 3, 3, − 14, 25, 26, 60, − 11, − 16, − 14, 26, 39, − 10}, 1 ≤ n ≤ 13.
Not for sale.
25
2.51
N2
y[ n] = ∑ m
g[ m]h[ n − m]. Now, h[ n − m] is defined for M1 ≤ n − m ≤ M 2 . Thus,
=N
1
for m = N1 , h[ n − m] is defined for M1 ≤ n − N1 ≤ M 2 , or equivalently, for
M1 + N1 ≤ n ≤ M 2 + N1 . Likewise, for m = N 2 , h[ n − m] is defined for
M1 ≤ n − N 2 ≤ M 2 , or equivalently, for M1 + N 2 ≤ n ≤ M 2 + N 2 . For the specified
sequences N1 = −3, N 2 = 4, M1 = 2, M 2 = 6. (a) The length of y[n] is
M 2 + N 2 − M1 − N1 + 1 = 6 + 4 − 2 − (−3) + 1 = 12 . (b) The range of n for y[ n] ≠ 0 is
min(M1 + N1 , M 2 + N 2 ) ≤ n ≤ max(M1 + N1 , M 2 + N 2 ) , i.e.,
M1 + N1 ≤ n ≤ M 2 + N 2 . For the specified sequences the range of n is − 1 ≤ n ≤ 10.
∞
2.52
* x 2 [ n] = ∑ x 1 [ n − k ]x 2 [ k ]. Now,
y[ n] = x1 [ n] O
k = −∞
∞
* x 2 [ n − N 2 ] = ∑ x1 [ n − N1 − k ] x 2 [ k − N 2 ]. Let k − N 2 = m.
v[ n] = x1 [ n − N1 ] O
k = −∞
Then v[ n] =
2.53
∞
∑ x 1 [ n − N1
m = −∞
− N 2 − m ]x 2 [ m] = y[ n − N1 − N 2 ].
g[ n] = x1[ n] O
* x 2 [ n] O
* x 3 [ n] = y[ n] O
* x 3 [ n] where y[ n] = x1[ n] O
* x 2 [ n]. Now
v[ n] = x1[ n − N1 ] O
* x 2 [ n − N 2 ]. Define h[ n] = v[ n] O
* x 3 [ n − N 3 ]. Then from the
results of Problem 2.52, v[ n] = y[ n − N1 − N 2 ]. Hence,
h[ n] = y[ n − N1 − N 2 ] O
* x 3 [ n − N 3 ]. Therefore, making use of the results of Problem
2.52 again we get h[ n] = y[ n − N1 − N 2 − N 3 ].
∞
2.54
* h[ n] = ∑ x[ n − k ]h[ k ]. Substituting k by n − m in this expression, we
y[ n] = x[ n] O
k = −∞
get y[ n] =
∞
* x[ n]. Hence the convolution operation is
∑ x[ m]h[ n − m] = h[ n] O
m = −∞
commutative.
∞
* (h1[ n] + h2 [ n]) = ∑ x[ n − k ](h1[ k ] + h2 [ k ])
Let y[ n] = x[ n] O
k = −∞
∞
∞
k = −∞
k = −∞
* h1[ n] + x[ n] O
* h2 [ n]. Hence the
= ∑ x[ n − k ]h1[ k ] + ∑ x[ n − k ]h2 [ k ] = x[ n] O
convolution operation is also distributive.
2.55
x 3 [ n] O
* x 2 [ n] O
* x1[ n] = x 3 [ n] O
* ( x 2 [ n] O
* x1[ n]). As x2 [ n] O
* x1[ n] is an unbounded
sequence, the result of this convolution cannot be determined. But
Not for sale.
26
x 2 [ n] O
* x 3 [ n] O
* x1[ n] = x 2 [ n] O
* ( x 3 [ n] O
* x1[ n]). Now x 3 [ n] O
* x1[ n] = 0 for all values
of n , and hence the overall result is zero. As a result, for the given sequences
x 3 [ n] O
* x 2 [ n] O
* x1[ n] ≠ x 2 [ n] O
* x 3 [ n] O
* x1[ n]
2.56
w[ n] = x[ n] O
* h[ n] = ∑ x[ k ]h[ n − k ] and
* h[ n] O
* g[ n]. Define y[ n] = x[ n] O
k
f [ n] = h[ n] O
* g[ n] = ∑ g[ k ]h[ n − k ]. Consider w1 [ n] = ( x[ n] O
* h[ n]) O
* g[ n]
k
= y[ n] O
* g[ n] = ∑ g[ m ]∑ x[ k ]h[ n − m − k ]. Now consider w 2 [ n] = x[ n] O
* (h[ n] O
* g[ n])
m
k
= x[ n] O
* f [ n] = ∑ x[ k ]∑ g[ m ]h[ n − k − m ]. The difference between the
k
m
expressions for w1[ n] and w2 [ n] is that the order of the summations is changed.
A) Assumptions: h[n] and g[n] are causal sequences, and x[ n] = 0 for n < 0. This
n
0,
for m < 0,
⎧
implies y[ m] = ⎨ m
Thus, w[ n] = ∑ g[ m]y[ n − m]
⎩∑ k = 0 x[k]h[m - k], for m ≥ 0.
m=0
n
n−m
m=0
k =0
= ∑ g[ m] ∑ x[ k ]h[ n − m − k ]. All sums have only a finite number of terms. Hence,
the interchange of the order of the summations is justified and will give correct results.
B) Assumptions: h[n] and g[n] are stable sequences, and x[n] is a bounded sequence
⎛ k2
⎞
with x[ n] ≤ B < ∞ . Here, y[ m] = ∑ ∞
k = −∞ h[ k ] x[ m − k ] = ⎜⎝ ∑ k = k1 h[ k ] x[ m − k ] ⎟⎠
+ε k1 , k 2 [ m] with ε k1 ,k 2 [ m ] ≤ ε n B. In this case, all sums have effectively only a finite
number of terms and the error ε k1 , k 2 [ m] can be reduced by choosing k1 and
k2 sufficiently large. As a result, in this case the problem is again effectively reduced
to that of the one-sided sequences. Thus, the interchange of the order of the
summations is again justified and will give correct results.
Hence, for the convolution to be associative, it is sufficient that the sequences be stable
and single-sided.
2.57
y[ n] = ∑ ∞
k = −∞ x[ n − k ]h[ k ]. Since h[k ] is of length M and defined for 0 ≤ k ≤ M − 1,
−1)
the convolution sum reduces to y[ n] = ∑ (kM
= 0 x[ n − k ]h[ k ]. y[n] will be nonzero for
all those values of n and for k which n − k satisfies 0 ≤ n − k ≤ N − 1. Minimum
value of n − k = 0 and occurs for lowest n at n = 0 and k = 0. Maximum value of
n − k = N − 1 and occurs for maximum value of k at M − 1. Thus n − k = M − 1
⇒ n = N + M − 2. Hence the total number of nonzero samples = N + M − 1.
Not for sale.
27
2.58
y[ n] = ∑ kN=−01x[ n − k ] x[ k ]. The maximum value of y[n] occurs at n = N − 1 when all
product terms are present. The maximum value is given by
y[ N − 1] = ∑ kN=−01a N −1− k a k .
2.59
y[ n] = ∑ kN=−01x[ n − k ]h[ k ]. The maximum value of y[n] occurs at n = N − 1 when all
product terms are present. The maximum value is given by
y[ N − 1] = ∑ kN=−01a N −1− k bk .
2.60
* hev [ n] = ∑ ∞
(a) y[ n] = g ev [ n] O
k = −∞ hev [ n − k ]g ev [ k ]. Now,
y[ −n] = ∑ ∞
k = −∞ hev [ − n − k ]g ev [ k ]. Replace k by − k. Then the summation on the left
∞
becomes y[ − n] = ∑ ∞
k = −∞ hev [ − n + k ]g ev [ − k ] = ∑ k = −∞ hev [ −( n − k )]g ev [ − k ]
* hev [ n] is an even sequence.
= y[n]. Hence g ev [ n] O
* hod [ n] = ∑ ∞
(b) y[ n] = g ev [ n] O
k = −∞ hod [ n − k ]g ev [ k ]. Now,
∞
y[ −n] = ∑ ∞
k = −∞ hod [ − n − k ]g ev [ k ] = ∑ k = −∞ hod [ − n + k ]g ev [ − k ]
∞
= ∑∞
k = −∞ hod [ −( n − k )]g ev [ − k ] = − ∑ k = −∞ hod [ n − k ]g ev [ k ] = − y[ n].
* hod [ n] is an odd sequence.
Hence g ev [ n] O
* hod [ n] = ∑ ∞
(c) y[ n] = g od [ n] O
k = −∞ hod [ n − k ]g od [ k ]. Now,
∞
y[ −n] = ∑ ∞
k = −∞ hod [ − n − k ]g od [ k ] = ∑ k = −∞ hod [ − n + k ]g od [ − k ]
∞
= ∑∞
k = −∞ hod [ −( n − k )]g od [ − k ] = ∑ k = −∞ hod [ n − k ]g od [ k ] = y[ n].
* hod [ n] is an even sequence.
Hence g od [ n] O
2.61
The impulse response of the cascade is given by h[ n] = h1[ n] O
* h2 [ n] where
(
)
h1[ n] = α n µ[ n] and h2 [ n] = β n µ[ n]. Hence, h[ n] = ∑ nk = 0 α k β n − k µ[ n].
2.62
k
∞
Now h[ n] = α n µ[ n]. Therefore y[ n] = ∑ ∞
k = −∞ h[ k ] x[ n − k ] = ∑ k = 0 α x[ n − k ]
k
k
∞
= x[ n] + ∑ ∞
k =1 α x[ n − k ] = x[ n ] + α ∑ k = 0 α x[ n − 1 − k ] = x[ n] + α y[ n − 1].
Hence, x[ n] = y[ n] − αy[ n − 1]. Thus the inverse system is given by
y[ n] = x[ n] − αx[ n − 1]. The impulse response of the inverse system is given by
h[ n] = {1, α}, 0 ≤ n ≤ 1.
2.63
(
)
From the results of Problem 2.62 we have h[ n] = ∑ nk = 0 α k β n − k µ[ n]. Now,
Not for sale.
28
∞ ⎛ k
∞ ⎛ k
∞
⎞
⎞
y[ n] = ∑ x[ n − k ]h[ k ] = ∑ ⎜⎜ ∑ α m β k − m ⎟⎟µ[ m]x[ n − k ] = ∑ ⎜⎜ ∑ α m β k − m ⎟⎟x[ n − k ]
k = −∞
k = −∞ ⎝ m = 0
k =0 ⎝ m =0
⎠
⎠
∞ ⎛ k
⎞
= x[ n] + ∑ ⎜⎜ ∑ α m β k − m ⎟⎟x[ n − k ]. Substituting r = k − 1 in the last expression we get
k =1 ⎝ m = 0
⎠
∞ ⎛ r
∞ ⎛ r +1
⎞
⎞
y[ n] = x[ n] + ∑ ⎜⎜ ∑ α m β r +1− m ⎟⎟x[ n − r − 1] = x[ n] + ∑ ⎜⎜ ∑ α m β r +1− m + α r +1 ⎟⎟x[ n − r − 1]
r =0 ⎝ m =0
r =0 ⎝ m =0
⎠
⎠
∞
∞ ⎛ r
⎞
= x[ n] + β ∑ ⎜⎜ ∑ α m β r − m ⎟⎟x[ n − r − 1] + ∑ α r +1 x[ n − r − 1]
r =0 ⎝ m =0
r =0
⎠
= x[ n] + βy[ n − 1] + αx[ n − 1] + α 2 x[ n − 2] + α 3 x[ n − 3] + K. The inverse system is
therefore given by x[ n] = y[ n] − (α + β) y[ n − 1] + αβ y[ n − 2].
2.64
(a) h[ n] = h1[ n] O
* h2 [ n] O
* h3 [ n] O
* h3 [ n] + h1[ n] O
* h2 [ n] + h3 [ n] O
* h4 [ n].
(b) h[ n] = h4 [ n] +
2.65
h1[ n] O
* h2 [ n] O
* h3 [ n]
1 − h1[ n] O
* h2 [ n] O
* h5 [ n]
.
h[ n] = h1[ n] O
* h2 [ n] + h3 [ n]. Now
h1[ n] O
* h2 [ n] = (2δ[ n − 2] − 3δ[ n + 1]) O
* (δ[ n − 1] + 2δ[ n + 2])
= 2δ[ n − 2] O
* δ[ n − 1] − 3δ[ n + 1] O
* δ[ n − 1] + 2δ[ n − 2] O
* 2δ[ n + 2] − 3δ[ n + 1] O
* 2δ[ n + 2]
= 2δ[ n − 3] − 3δ[ n] + 4δ[ n] − 6δ[ n + 3] and
h3 [n] = 5δ[n − 5] + 7δ[n − 3] + 2δ[n − 1] − δ[n] + 3δ[n + 1]. Therefore,
h[ n] = 2δ[ n − 3] − 3δ[n] + 4δ[n] − 6δ[ n + 3] + 5δ[ n − 5] + 7δ[n − 3] + 2δ[ n − 1] − δ[ n] + 3δ[ n + 1]
= 5δ[n − 5] + 9δ[n − 3] + 2δ[n − 1] + 3δ[n + 1] − 6δ[n + 3].
2.66
3
⎫
1 ⎧
⎨ y[ n] − ∑ h[ k ]x[ n − k ]⎬ we
h[0] ⎩
k =0
⎭
(a) The length of x[n] is 8 − 4 + 1 = 5. Using x[ n] =
arrive at {x[ n]} = {3, − 2, 0, 1, 2}, 0 ≤ n ≤ 4.
(b) The length of x[n] is 7 − 4 + 1 = 4. Using x[ n] =
3
⎫
1 ⎧
⎨ y[ n] − ∑ h[ k ]x[ n − k ]⎬ we
h[0] ⎩
k =0
⎭
arrive at {x[ n]} = {1, 2, 3, 4}, 0 ≤ n ≤ 3.
(c) The length of x[n] is 8 − 5 + 1 = 4. Using x[ n] =
4
⎫
1 ⎧
⎨ y[ n] − ∑ h[ k ]x[ n − k ]⎬ we
h[0] ⎩
k =0
⎭
arrive at {x[ n]} = {1, − 2, 3, − 1}, 0 ≤ n ≤ 3.
Not for sale.
29
2.67
y[ n] = ay[ n − 1] + bx[ n]. Hence, y[0] = ay[ −1] + bx[ 0]. Next, y[1] = ay[0] + bx[1]
= a(ay[ −1] + bx[0]) + bx[1] = a 2 y[ −1] + abx[0] + bx[1]. Continuing further in a similar
way we obtained y[ n] = a n +1 y[ −1] + ∑ nk = 0 a n − k bx[ k ].
(a) Let y1[ n] be the output due to an input x1[ n]. Then
y1[ n] = a n +1 y[ −1] + ∑ nk = 0 a n − k bx1[ k ]. If x1[ n] = x[ n − no ], then
y1[ n] = a n +1 y[ −1] + ∑ nk = 0 a n − k bx[ k − no ] = a n +1 y[ −1] + ∑ rn=−0n o a n − n o − r bx[r ].
However,
y[ n − no ] = a n +1 y[ −1] + ∑ nk = 0 a n − k bx[ k − no ] = a n − n o +1 y[ −1] + ∑ rn=−0n o a n − n o − r bx[r ].
Hence y1[ n] ≠ y[ n − no ] if y[ −1] ≠ 0, i.e., the system is time-variant. The system is
time-invariant if and only if y[ −1] = 0, as then y1[ n] = y[ n − no ] .
(b) Let y1[ n] and y1[ n] be the outputs due to inputs x1[ n] and x1[ n] , respectively.
Let y[n] be the output due to an input αx1[ n] + βx 2 [ n]. However, αy1[ n] + βy2 [ n] =
α a n +1 y[ −1] + β a n +1 y[ −1] + α ∑ nk = 0 a n − k bx1[ k ] + β∑ nk = 0 a n − k bx 2 [ k ], whereas,
y[ n] = a n +1 y[ −1] + α ∑ nk = 0 a n − k bx1[ k ] + β∑ nk = 0 a n − k bx 2 [ k ]. Hence, the system is
nonlinear if y[ −1] ≠ 0 and is linear if and only if y[ −1] = 0.
(c) Generalizing the above result it can be shown that an N –th order causal discretetime system is linear and time-invariant if and only if y[ −r ] = 0,1 ≤ r ≤ N .
2.68
y[ n] = p0 x[ n] + p1 x[ n − 1] − d1 y[ n − 1] leads to x[ n] =
1
p0
y[ n] +
d1
p0
y[ n − 1] −
p1
p0
x[ n − 1],
which is the difference equation characterizing the inverse system. In other words, simply
solve the equation for x[n] in terms of present and past values of y[n] and x[n].
2.69
s[ n] = ∑ nk = 0 h[ k ]µ[ n − k ] = ∑ nk = 0 h[ k ], n ≥ 0, and s[ n] = 0, n < 0. Since h[k ] is
nonnegative, s[n] is a monotonically increasing function of n for n ≥ 0 , and is not
oscillatory. Hence, there is no overshoot.
2.70
(a) f [ n] = f [ n − 1] + f [ n − 2]. Let f [ n] = αr n , then the difference equation reduces to
αr n − αr n −1 − αr n − 2 = 0 which reduces further to r 2 − r − 1 = 0 resulting in
r=
n
n
1± 5
⎛ 1+ 5 ⎞
⎛ 1− 5 ⎞
+ α1 ⎜
.
. Thus, f [ n] = α1 ⎜
⎟
⎟
2
⎝ 2 ⎠
⎝ 2 ⎠
As f [ 0] = 0, hence α1 + α 2 = 0. Also f [1] = 1, , and hence
⎛⎜ α 1 + α 2 ⎞⎟ + 5 ⎛⎜ α 1 − α 2 ⎞⎟ = 1. Solving for α and α , we get α = −α = 1 . Hence,
1
2
1
2
5
⎝ 2 ⎠
⎝ 2 ⎠
Not for sale.
30
n
n
1 ⎛ 1− 5 ⎞
⎛ 1+ 5 ⎞
f [ n] =
⎜
⎟ − ⎜
⎟ .
5⎝ 2 ⎠
5⎝ 2 ⎠
1
(b) y[ n] = y[ n − 1] + y[ n − 2] + x[ n − 1]. As the system is LTI, the initial conditions are
equal to zero. Let x[ n] = δ[ n]. Then y[ n] = y[ n − 1] + y[ n − 2] + δ[ n − 1]. Hence,
y[0] = y[ −1] + y[ −2] = 0 and y[1] = y[ 0] + y[ −2] + δ[ 0] = 1. For n > 1, the
corresponding difference equation is y[ n] = y[ n − 1] + y[ n − 2] with initial conditions
y[ 0] = 0 and y[1] = 1, which are the same as those for the solution of the Fibonacci’s
n
n
1 ⎛ 1− 5 ⎞
⎛ 1+ 5 ⎞
sequence. Hence y[ n] =
⎜
⎟ − ⎜
⎟ . Thus denotes the impulse
5⎝ 2 ⎠
5⎝ 2 ⎠
response of a causal LTI system described by the difference equation
y[ n] = y[ n − 1] + y[ n − 2] + x[ n − 1].
1
2.71 y[ n] = αy[ n − 1] + x[ n]. Denoting y[ n] = yre [ n] + j yim [ n], and α = a + j b, we get
yre [ n] + j yim [ n] = (a + j b)( yre [ n − 1] + j yim [ n − 1]) + x[ n]. Equating the real and the
imaginary parts, and noting that x[n] is real, we get
yre [ n] = ayre [ n − 1] − byim [ n − 1] + x[ n], yim [ n] = byre [ n − 1] + ayim [ n − 1]. From the
second equation we have yim [ n − 1] =
1
b
yim [ n] − yre [ n − 1].
a
a
Substituting this
equation in the top left equation we arrive at
b
a
yre [ n] = ayre [ n − 1] − yim [ n] +
b2
a
yre [ n − 1] + x[ n], from which we get
byim [ n − 1] = − ayre [ n − 1] + ( a 2 + b 2 ) yre [ n − 2] + ax[ n − 1]. Substituting this equation
in the equation yre [ n] = ayre [ n − 1] − byim [ n − 1] + x[ n] we arrive at
yre [ n] = 2 ayre [ n − 1] − ( a 2 + b 2 ) yre [ n − 2] + x[ n] − ax[ n − 1] which is a second-order
difference equation representing yre [n] in terms of x[n].
2.72
The first-order causal LTI system is characterized by the difference equation
y[ n] = p0 x[ n] + p1 x[ n − 1] − d1 y[ n − 1]. Letting x[ n] = δ[ n] we obtain the difference
equation representation of its impulse response h[ n] = p0 δ[ n] + p1δ[ n − 1] − d1h[ n − 1].
Solving it for n = 0,1, 2, we get h[0] = p0 , h[1] = p1 − d1h[0] = p1 − d1 p0 , and
h[2] = −d1h[1] = − d1 p0 ( p1 − d1 p0 ). Solving these equations we get p0 = h[0],
d1 = −
2.73
h[ 2 ]
,
h[1]
and p1 = h[1] −
h[ 2 ]h[ 0 ]
.
h[1]
M
N
M
N
k =0
k =0
N d h[r
∑k =0 k
k =0
k =0
∑ pk x[ n − k ] = ∑ d k y[ n − k ]. Let x[ n] = δ[ n]. Then ∑ p k δ[ n − k ] = ∑ d k h[ n − k ].
Thus, pr =
− k ]. Since the system is assumed to be causal, h[r − k ] = 0
Not for sale.
31
for all k > r. Hence, pr = ∑ kN= 0 d k h[r − k ] = ∑ kN= 0 h[ k ]d r − k .
2.74
For a filter with a complex-valued impulse response, the first part of the proof is the
same as that for a filter with a real-valued impulse response. From
∞
∞
y[ n] = ∑ ∞
k = −∞ h[ k ]x[ n − k ] we get y[ n] = ∑ k = −∞ h[ k ]x[ n − k ] ≤ ∑ k = −∞ h[ k ] x[ n − k ] .
Since the input is bounded x[ n] ≤ B x . Therefore y[ n] ≤ B x ∑ ∞
k = −∞ h[ k ] . So if
∑∞
k = −∞ h[ k ] = S < ∞, then y[ n] ≤ B x S indicating that y[n] is also bounded.
To prove the converse we need to show that if a bounded input is produced by a
bounded input then S < ∞. Consider the following bounded input defined by
∞ h * [ − k ]h[ k ]
∞
h * [ − n]
. Then y[ n] = ∑
x[ n] =
= ∑ h[ k ] = S. Now since the output
h[ −n]
h[ k ]
k = −∞
k = −∞
is bounded, S < ∞. Thus for a filter with a complex impulse response is BIBO stable if
and only if ∑ ∞
k = −∞ h[ k ] = S < ∞.
2.75
The impulse response of the cascade is g[ k ] = ∑ ∞
k = −∞ h1[ k − r ]h 2 [r ]. Thus
∞
∞
∞
⎞
⎞⎛ ∞
⎛ ∞
∑ h1[ k − r ] h2 [r ] ≤ ⎜⎜ ∑ h1[ k ] ⎟⎟ ⎜⎜ ∑ h2 [r ] ⎟⎟. Since
k = −∞
k = −∞ r = −∞
⎠
⎠ ⎝ r = −∞
⎝ k = −∞
h1[ n] and h2 [ n] are stable, ∑ h1[ k ] < ∞ and ∑ h2 [ k ] < ∞. Hence ∑ g[ k ] < ∞ and as a
∑ g[ k ] = ∑
k
k
k
result, a cascade of two stable LTI systems is also stable.
2.76
The impulse response of the parallel structure is g[ n] = h1[ n] + h2 [ n]. Now,
∞
∞
∞
∞
k = −∞
k = −∞
k = −∞
k = −∞
∑ g[ k ] = ∑ h1[ k ] + h2 [ k ] ≤ ∑ h1[ k ] + ∑ h2 [ k ] . Since h1[ n] and
h2 [ n] are stable, ∑ h1[ k ] < ∞ and ∑ h2 [ k ] < ∞. Hence ∑ g[ k ] < ∞ and as a result, a
k
k
k
parallel connection of two stable LTI systems is also stable.
2.77
Consider a cascade connection of two passive LTI systems with an input x[n] and an
output y[n]. Let y1[ n] and y2 [ n] be the outputs of the two systems for the input
∞
∞
∞
x[n]. Now ∑ ∞
n = −∞ y1[ n] ≤ ∑ n = −∞ x[ n] and ∑ n = −∞ y2 [ n] ≤ ∑ n = −∞ x[ n] . Let
y1[ n] = y2 [ n] = x[ n] satisfying the above inequalities. Then y[ n] = y1[ n] + y2 [ n]
2
2
2
2
2
2
2
∞
∞
= 2 x[ n] and as a result, ∑ ∞
n = −∞ y[ n] = 4∑ n = −∞ x[ n] > ∑ n = −∞ x[ n] . Hence, the
parallel connection of two passive LTI systems may not be passive.
2.78
Consider a parallel connection of two passive LTI systems with an input x[n] and an
output y[n]. Let y1[ n] and y2 [ n] be the outputs of the two systems for the input
Not for sale.
32
∞
∞
∞
x[n]. Now ∑ ∞
n = −∞ y1[ n] ≤ ∑ n = −∞ x[ n] and ∑ n = −∞ y2 [ n] ≤ ∑ n = −∞ x[ n] . Let
y1[ n] = y2 [ n] = x[ n] satisfying the above inequalities. Then y[ n] = y1[ n] + y2 [ n]
2
2
2
2
2
2
2
∞
∞
= 2 x[ n] and as a result, ∑ ∞
n = −∞ y[ n] = 4∑ n = −∞ x[ n] > ∑ n = −∞ x[ n] . Hence, the
parallel connection of two passive LTI systems may not be passive.
2.79
Let the difference equation ∑ kM= 0 p k x[ n − k ] = y[ n] + ∑ kN=1 d k y[ n − k ] represents the
causal IIR digital filter. For an input x[ n] = δ[ n], the corresponding output is then
y[ n] = h[ n], the impulse response of the filter. As the number of coefficients { p k } is
M + 1 and the number of coefficients {d k } is N , there are a total of N + M + 1
unknowns. To determine these coefficients from the impulse response samples, we
compute only the first N + M + 1 impulse response samples. To illustrate the method,
without any loss of generality, we assume N = M = 3. Then, from the difference
equation we arrive at the following N + M + 1 = 7 equations:
h[0] = p0 ,
h[1] + h[0]d1 = p1 ,
h[2] + h[1]d1 + h[0]d 2 = p2 ,
h[3] + h[2]d1 + h[1]d 2 + h[0]d 2 = p2 ,
h[ 4] + h[3]d1 + h[2]d 2 + h[1]d 2 = 0,
h[5] + h[ 4]d1 + h[3]d 2 + h[2]d 2 = 0,
h[6] + h[5]d1 + h[ 4]d 2 + h[3]d 2 = 0.
Writing the last three equations in matrix form we arrive at
−1
⎡ d1 ⎤
⎡ h[3] h[2] h[1] ⎤ ⎡h[ 4]⎤
⎡h[ 4]⎤ ⎡ h[3] h[2] h[1] ⎤ ⎡ d1 ⎤ ⎡0⎤
⎢ h[5]⎥ = ⎢h[ 4] h[3] h[2]⎥ ⎢d 2 ⎥ = ⎢0⎥, and hence, ⎢d 2 ⎥ = − ⎢h[ 4] h[3] h[2]⎥ ⎢ h[5]⎥.
⎢d ⎥
⎢⎣ h[5] h[ 4] h[3]⎥⎦ ⎢⎣h[6]⎥⎦
⎢⎣h[6]⎥⎦ ⎢⎣ h[5] h[ 4] h[3]⎥⎦ ⎢ d ⎥ ⎢⎣0⎥⎦
⎣ 3⎦
⎣ 3⎦
Substituting these values in the first four equations written in matrix form we get
⎡ p0 ⎤ ⎡h[0] 0
0
0 ⎤⎡ 1 ⎤
⎢ p1 ⎥ ⎢ h[1] h[0] 0
0 ⎥ ⎢ d1 ⎥
⎢ p ⎥ = ⎢h[2] h[1] h[0] 0 ⎥ ⎢d ⎥.
2
⎢ 2⎥ ⎢
⎢d ⎥
⎥
[
3
]
[
2
]
[
1
]
[
0
]
h
h
h
h
⎦⎣ 3 ⎦
⎣ p3 ⎦ ⎣
2.80
y[ n] = y[ −1] + ∑ ln= 0 x[l] =y[ −1] + ∑ ln= 0 lµ[l] =y[ −1] + ∑ ln= 0 l =y[ −1] +
(a) For y[ −1] = 0, y[ n] =
n( n +1)
.
2
n( n +1)
.
2
(b) For y[ −1] = −2, y[ n] = −2 +
n( n +1)
2
=
n2 +n−4
.
2
Not for sale.
33
2.81
y(nT ) = y((n − 1)T ) + ∫(nT
n −1)T x ( τ)dτ =y(( n − 1)T ) + T ⋅ x (( n − 1)T ). Therefore, the
difference equation representation is given by y[ n] = y[ n − 1] + T ⋅ x[ n − 1] where
y[ n] = y( nT ) and x[ n] = x ( nT ).
2.82
y[ n] = ∑ ln=1 x[l] = ∑ ln=−11 x[l] + x[ n], n ≥ 1. Now y[ n − 1] =
1
n
1
n
1
n
1
∑ n −1 x[l], n ≥ 1,
n −1 l =1
i.e,
∑ ln=−11 x[l] = (n − 1) y[ n − 1]. Thus, the difference equation representation is given by
1
n −1 ⎞
y[ n] = ⎛⎜
⎟ y[ n − 1] + x[ n].
n
⎝ n ⎠
2.83
y[ n] − 0.35 y[ n − 1] = 2.4µ[ n] with y[ −1] = 3. The total solution is given by
y[ n] = yc [ n] + y p [ n], where yc [n] is the complementary solution and y p [n] is the
particular solution.
yc [n] is obtained by solving yc [ n] − 0.35 yc [ n − 1] = 0. To this end we set y c [ n] = λn ,
which yields λn − 0.35λn −1 = 0 resulting in the solution λ = 0.35. Hence
y c [ n] = α(0.35) n .
For the particular solution we choose y p [ n] = β. Substituting this solution in the
difference equation representing the system we get β − 0.35β = 2.4µ[ n]. For n = 0 we
get β − 0.35β = 2.4 , i.e., (1 − 0.35)β = 2.4 and hence β = 2.4 / 0.65 = 48 / 13.
Therefore y[ n] = yc [ n] + y p [ n] = α(0.35) n +
y[ −1] = 3 = α(0.35) −1 +
y[ n] =
2.84
48
implying
13
48
−0.2423(0.35) n + , n ≥ 0.
13
48
,
13
n ≥ 0. For n = −1, we thus have
α = −0.2423. The total solution is thus given by
y[ n] − 0.3 y[ n − 1] − 0.04 y[ n − 2] = 3 n µ[ n] with y[ −1] = 2 and y[ −2] = 1. The total
solution is given by y[ n] = yc [ n] + y p [ n], where yc [n] is the complementary solution
and y p [n] is the particular solution.
yc [n] is obtained by solving yc [ n] − 0.3 yc [ n − 1] − 0.04 yc [ n − 2] = 0. To this end we
set y c [ n] = λn , which yields λn − 0.3λn −1 − 0.04 λn − 2 = 0 resulting in the solutions
λ = 0.4 or λ = −0.1. Hence y c [ n] = α1 (0.4) n + α 2 ( −0.1) n .
For the particular solution we choose y p [ n] = β(3) n . Substituting this solution in the
difference equation representing the system we get
β(3) n − 0.3β(3) n −1 − 0.04β(3) n − 2 = 3 n µ[ n]. For n = 0 we have
β − 0.3β(3) −1 − 0.04β(3) −2 = 1 which yields β = 1.1166 . Therefore
Not for sale.
34
y[ n] = yc [ n] + y p [ n] = α1 (0.4) n + α 2 (−0.1) n + 1.1166(3) n , n ≥ 0. For n = −1 and
n = −2 we thus have y[ −1] = α1 (0.4) −1 + α 2 (−0.1) −1 + 1.1166(3) −1 = 2 and
y[ −2] = α1 (0.4) −1 2 + α 2 (−0.1) −2 + 1.1166(3) −2 = 1. Solving these two equations we
get α1 = 0.5489 and α 2 = −0.0255. Hence,
y[ n] = 0.5489(0.4) n − 0.0255(−0.1) n + 1.1166(3) n , n ≥ 0.
2.85
y[ n] − 0.3 y[ n − 1] − 0.04 y[ n − 2] = x[ n] + 2 x[ n − 1] with x[ n] = 3 n µ[ n], y[ −1] = 2 and
y[ −2] = 1. The total solution is given by y[ n] = yc [ n] + y p [ n], where yc [n] is the
complementary solution and y p [n] is the particular solution. From the solution of
Problem 2.84, the complementary solution is of the form y c [ n] = α1 (0.4) n + α 2 ( −0.1) n .
To determine y p [n] we observe that the it is given by the sum of the particular solution
y p1[ n] of the difference equation y1[ n] − 0.3 y1[ n − 1] − 0.04 y1[ n − 2] = x[ n] = 3 n µ[ n]
and the particular solution y p2 [ n] of the difference equation
y2 [ n] − 0.3 y2 [ n − 1] − 0.04 y2 [ n − 2] = 2 x[ n − 1] = 2 ⋅ 3 n −1 µ[ n − 1]. From the solution of
Problem 2.84, we have y p1[ n] = β(3) n . Hence, y p2 [ n] = 2 y p1[ n − 1] = 2β(3) n −1 .
Therefore, y p [ n] = y p1[ n] + 2 y p2 [ n] = β(3) n + 2β(3) n −1 = 3 n µ[ n] + 2 ⋅ 3 n −1 µ[ n − 1].
For n = 1 the above equation reduces to 3β + 2β = 3 + 2. Thus, β = 1. Therefore, the
total solution is given by
y[ n] = yc [ n] + y p [ n] = α1 (0.4) n + α 2 (−0.1) n + (3) n + 2(3) n −1 , n ≥ 0. For n = −1 and
n = −2 we thus have y[ −1] = α1 (0.4) −1 + α 2 (−0.1) −1 + (3) −1 + 2(3) −2 = 2 and
y[ −2] = α1 (0.4) −2 + α 2 (−0.1) −2 + (3) −2 + 2(3) −3 = 1. Solving these two equations we
get α1 = 0.4883 and α 2 = −0.0224. Hence,
y[ n] = 0.4883(0.4) n − 0.0224(−0.1) n + (3) n + 2(3) n −1 , n ≥ 0.
2.86
h[ n] − 0.35h[ n − 1] = δ[ n]. The solution is given by h[ n] = hc [ n] + h p [ n], where hc [n]
is the complementary solution and h p [n] is the particular solution. If h[n] is the
impulse response, then h p [ n] = 0. From Problem 2.83 we note that hc [ n] = α(0.35) n .
Thus, h[0] − 0.35h[ −1] = h[0] = 1. This implies α = 1. Hence, h[ n] = (0.35) n , n ≥ 0.
2.87
The overall system can be regarded as the cascade of two causal LTI systems:
S1: y[n] − 0.3 y[n − 1] − 0.04 y[n − 2] = x1[n] and S2: x1[n] = x[n] + 2 x[n − 1] .
Not for sale.
35
The impulse response h1[ n] of the system S1 can be found by solving the
complementary solution of h1[ n] − 0.3h1[ n − 1] − 0.04h1[ n − 2] = δ[ n] . Let the
complementary solution be h1c [ n] = λn , we have λn − 0.3λn −1 − 0.04λn − 2 = 0
hence λ = {0.4, − 0.1} . Therefore, the impulse response h1[ n] is given by
h1[ n] = h1c [ n] = A(0.4) n + B( −0.1) n , n ≥ 0 . Solving constants A, B, we get A = 0.8
and B = 0.2. Hence h1[ n] = 0.8(0.4) n + 0.2(−0.1) n , n ≥ 0. .
The impulse response h2 [ n] of the system S2 is given by h2 [ n] = δ[ n] + 2δ[ n − 1]. .
The impulse response h[n] of the overall system is
(
)
(
)
h[ n] = h1[ n] * h2 [ n] = 0.8(0.4) n + 0.2(−0.1) n µ[ n] + 2 0.8(0.4) n −1 + 0.2(−0.1) n −1 µ[ n − 1]
= δ[ n] + 1.92(0.4)
2.88
n −1
µ[ n − 1] + 0.38(−0.1)
n −1
µ[ n − 1].
h[ n] = (−α) n µ[ n], 0 < α < 1. Step response is then given by s[ n] = h[ n] O
* µ[ n]
∞
⎧∑ n (−α) k , n ≥ 0,
k
= (−α) n µ[ n] O
* µ[ n] = ∑ (−α) µ[ k ]µ[ n − k ] = ⎨ k = 0
0,
n<0
k = −∞
⎩
⎧⎪1− ( − α ) n +1
= ⎨ 1+ α , n ≥ 0,
⎪⎩
0,
n < 0.
2.89
K
K
n +1
= 1. Since there
λ i . Now lim
n→∞ n
1 + λi
A
< 1. Hence
exists a positive integer N o such that for all n > N o , 0 < n +1 <
2
An
A
n +1
Let An = n (λ i ) . Then n +1 =
An
n
K
n
∑∞
n =0 An converges.
2.90
{x[ n]} = {− 4, 5, 1, − 2, − 3, 0, 2}, − 3 ≤ n ≤ 3,
{y[ n]} = {6, − 3, − 1, 0, 8, 7, − 2}, − 1 ≤ n ≤ 5,
{w[ n]} = {3, 2, 2, − 1, 0, − 2, 5}, 2 ≤ n ≤ 8.
(a) rxx [l] = ∑ 3n = −3 x[ n]x[ n − l], − 6 ≤ l ≤ 6.
{rxx [l]} = {− 8, 10, 14, − 11, − 23, − 11, 59, − 11, − 23, − 11, 14, 10, − 8}, − 6 ≤ l ≤ 6,
ryy [l] = ∑ 5n = −5 y[ n]y[ n − l], − 6 ≤ l ≤ 6.
{ryy [l]} = {− 12, 48, 29, − 31, − 30, 27, 163, 27, − 30, − 31, 29, 48, − 12}, − 6 ≤ l ≤ 6,
rww [ l] = ∑ 6n = −6 w[ n]w[ n − l], − 6 ≤ l ≤ 6.
{rww [l]} = {15, 4, 6, − 12, 6, − 2, 47, − 2, 6, − 12, 6, 4, 15}, − 6 ≤ l ≤ 6,
Not for sale.
36
(b) rxy [l] = ∑ 3n = −5 x[ n]y[ n − l], − 8 ≤ l ≤ 4.
{rxy [l]} = {8, − 38, 1, 51, 4, − 30, − 68, 43, 31, − 3, − 20, − 6, 12}, − 8 ≤ l ≤ 4,
rxw [l] = ∑ 3n = −8 x[ n]y[ n − l], − 11 ≤ l ≤ 1.
{rxw [l]} = {− 20, 33, − 5, − 8, − 24, 7, 12, 12, − 7, − 14, − 5, 4, 6}, − 11 ≤ l ≤ 1,
2.91
n
n−l
∞
(a) x1[ n] = α n µ[ n]. rx 1 x1 [l] = ∑ ∞
µ[ n − l]
n = −∞ x1[ n]x1[ n − l] = ∑ n = −∞ α µ[ n] α
⎧ α −l
, l < 0,
2n − l
∞
⎧
, l < 0, ⎪⎪1− α 2
⎪∑ n = 0 α
2n − l
∞
= ∑n=0 α
µ[ n − l] = ⎨
=⎨ l
2n − l
⎪⎩∑ ∞
, l ≥ 0, ⎪ α , l ≥ 0.
n=l α
⎪⎩1− α 2
Note for l ≥ 0, rx1 x1 [l] =
αl
1− α 2
, and for l < 0, rx1 x1 [l] =
in the second expression we get rx1 x1 [ −l] =
α −( −l )
1− α 2
=
α −l
1− α 2
αl
1− α 2
. Replacing
l with − l
= rx x [l]. Hence, rx x [l]
1 1
1 1
is an even function of l. Maximum value of rx1 x1 [l] occurs at l = 0 since α l is a
decaying function for increasing when α < 1.
1, 0 ≤ n ≤ N − 1,
Now rx 2 x 2 [l] = ∑ nN=−01x 2 [ n − l], where
(b) x 2 [ n] = ⎧⎨
0
,
otherwise.
⎩
for l < −( N − 1),
⎧ 0,
⎪ N + l, for − ( N − 1) ≤ l ≤ 0,
⎪
1, l ≤ n ≤ N − 1 + l,
x 2 [ n − l] = ⎧⎨
Therefore, rx 2 x 2 [l] = ⎨ N ,
for l = 0,
0
,
otherwise.
⎩
⎪ N − l, for 0 < N − l ≤ N − 1,
⎪⎩ 0,
for l > N − 1.
It follows from the above that rx 2 x2 [l] is a triangular function of l , and hence is an
even function with a maximum value of N at l = 0.
2.92
πn
(a) x1[ n] = cos⎛⎜ ⎞⎟ where M is a positive integer. Period of x1[ n] is 2 M , and
⎝M⎠
1 2 M −1
1 2 M −1 ⎛ πn ⎞ ⎛ π(n + l) ⎞
hence rx1 x1 [l] =
⎟
∑ x 2 [ n] x 2 [ n + l ] =
∑ cos⎜ ⎟ cos⎜
2M n =0
2M n =0
⎝M⎠ ⎝ M ⎠
=
1 2 M −1 ⎛ πn ⎞⎧ ⎛ πn ⎞ ⎛ πl ⎞
⎛ πn ⎞ ⎛ πl ⎞⎫
∑ cos⎜ ⎟⎨cos⎜ ⎟ cos⎜ ⎟ − sin⎜ ⎟ sin⎜ ⎟⎬
2M n =0
⎝ M ⎠ ⎝ M ⎠⎭
⎝ M ⎠⎩ ⎝ M ⎠ ⎝ M ⎠
=
1
⎛ πn ⎞
⎛ πl ⎞2 M −1
cos⎜ ⎟ ∑ cos 2 ⎜ ⎟.
2M
⎝M⎠
⎝ M ⎠ n=0
Not for sale.
37
Now
2 M −1
N −1
N −1 ⎧
⎛ 4 πn ⎞⎫ N 1 N −1 ⎛ 4 πn ⎞
2 ⎛ πn ⎞
2 ⎛ 4 πn ⎞ 1
∑ cos ⎜ ⎟ = ∑ cos ⎜
⎟ = ∑ ⎨1 + cos⎜
⎟⎬ = + ∑ cos⎜
⎟.
⎝ M ⎠ n=0
⎝ N ⎠ 2 n=0 ⎩
⎝ N ⎠⎭ 2 2 n = 0 ⎝ N ⎠
n=0
N −1
N −1 ⎛ 4 πn ⎞
N −1
⎛ 4πn ⎞
j ( 4 πn / N )
Let C = ∑ cos⎜
⎟ and S = ∑ sin⎜
⎟. Then C + jS = ∑ e
⎝ N ⎠
⎝ N ⎠
n=0
n=0
n=0
e j 4π − 1
=
e
j 4π / N
−1
= 0. This implies C = 0. Thus
Hence, rx1 x1 [l] =
2 M −1
2 ⎛ πn ⎞ N
∑ cos ⎜ ⎟ = = M .
⎝M⎠ 2
n=0
M
⎛ πl ⎞
⎛ πl ⎞ 1
cos⎜ ⎟ = cos⎜ ⎟.
2M
⎝M⎠
⎝M⎠ 2
(b) {x 2 [ n]} = ⟨ n⟩ 6 = {0, 1, 2, 3, 4, 5}, 0 ≤ n ≤ 5. It is a periodic sequence with a
1
period 6. Thus, rx 2 x 2 [l] = ∑ 5n = 0 x 2 [ n]⟨ x 2 [ n + l]⟩ 6 , 0 ≤ l ≤ 5. rx 2 x2 [l] is also a
6
periodic sequence with a period 6.
(
)
1
55
x [0]x 2 [0] + x 2 [1]x 2 [1] + x 2 [2]x 2 [2] + x 2 [3]x 2 [3] + x 2 [ 4]x 2 [ 4] + x 2 [5]x 2 [5] = ,
6 2
6
40
1
rx2 x2 [1] = x 2 [0]x 2 [1] + x 2 [1]x 2 [2] + x 2 [2]x 2 [3] + x 2 [3]x 2 [ 4] + x 2 [ 4]x 2 [5] + x 2 [5]x 2 [0] = ,
6
6
1
32
rx2 x2 [2] = x 2 [0]x 2 [2] + x 2 [1]x 2 [3] + x 2 [2]x 2 [ 4] + x 2 [3]x 2 [5] + x 2 [ 4]x 2 [0] + x 2 [5]x 2 [1] = ,
6
6
28
1
rx2 x2 [3] = x 2 [0]x 2 [3] + x 2 [1]x 2 [ 4] + x 2 [2]x 2 [5] + x 2 [3]x 2 [0] + x 2 [ 4]x 2 [1] + x 2 [5]x 2 [2] = ,
6
6
1
31
rx2 x2 [ 4] = x 2 [0]x 2 [ 4] + x 2 [1]x 2 [5] + x 2 [2]x 2 [0] + x 2 [3]x 2 [1] + x 2 [ 4]x 2 [2] + x 2 [3]x 2 [ 4] = ,
6
6
40
1
rx2 x2 [5] = x 2 [0]x 2 [5] + x 2 [1]x 2 [0] + x 2 [2]x 2 [1] + x 2 [3]x 2 [2] + x 2 [ 4]x 2 [3] + x 2 [5]x 2 [ 4] = .
6
6
rx 2 x 2 [0] =
(
)
(
)
(
)
(
)
(
)
(c) x 3 [ n] = ( −1) n is a periodic sequence with a period 2. Thus,
1
2
1
2
rx 3 x 3 [l] = ∑1n = 0 x3 [ n]x3 [ n + l], 0 ≤ l ≤ 1. Hence,
rx 3 x 3 [0] =
(x3 [0]x3 [0] + x3 [1]x3 [1]) = 1,
rx 3 x 3 [1] =
1
2
(x3 [0]x3 [1] + x3 [1]x3 [0]) = −1.
rx3 x3 [l] is also a periodic sequence with a period 2.
M2.1 (a) The input data entered during the execution of Program 2_2.m are:
Type in real exponent = -1/12
Type in imaginary exponent = pi/6
Type in gain constant = 1
Type in length of sequence = 41
(b) The input data entered during the execution of Program 2_2.m are:
Type in real exponent = -1/12
Type in imaginary exponent = pi/6
Type in gain constant = 1
Type in length of sequence = 41
Not for sale.
38
Real part
Imaginary part
0.5
0
Amplitude
Amplitude
0
-0.5
-1
-0.5
-1
-1.5
-1.5
0
10
20
Time index n
30
40
0
5
10
15
20
Time index n
25
30
M2.2 (a) ~
x a [ n] = e − j 0.4 πn . The plots generated using Program 2_2.m are shown below:
Imaginary part
Real part
1
1
0.5
Amplitude
Amplitude
0.5
0
0
-0.5
-0.5
-1
-1
0
10
20
Time index n
30
0
40
10
20
Time index n
30
40
(b) The code fragment used to generate ~
x b [ n] = sin(0.8πn + 0.8π) is as follows:
x = sin(0.8*pi*n + 0.8*pi);
The plot of the periodic sequence is given below:
1
Amplitude
0.5
0
-0.5
-1
0
10
20
n
30
(
40
) (
)
(c) The code fragment used to generate ~
x c [ n] = Re e jπn / 5 + Im e jπn / 10 is as
follows:
x = real(exp(i*pi*n/5)+ imag(exp(i*pi*n/10);
The plot of the periodic sequence is given below:
Not for sale.
39
2
Amplitude
1
0
-1
-2
0
10
20
n
30
40
(d) The code fragment used to generate ~
x d [ n] = 3 cos(1.3πn) − 4 sin(0.5πn + 0.5π) is as
follows:
x = 3*cos(1.3*pi*n)-4*sin(0.5*pi*n+0.5*pi);
The plot of the periodic sequence is given below:
10
Amplitude
5
0
-5
-10
0
10
20
n
30
40
(e) The code fragment used to generate
~
x e [ n] = 5 cos(1.5πn + 0.75π) + 4 cos(0.6πn) − sin(0.5πn) is as follows:
x = 5*cos(1.5*pi*n+0.75*pi)+4*cos(0.6*pi*n)-sin(0.5*pi*n);
The plot of the periodic sequence is given below:
10
Amplitude
5
0
-5
-10
0
10
20
n
30
40
M2.3 (a) L = input('Desired length = ');
A = input('Amplitude = ');
omega = input('Angular frequency = ');
phi = input('Phase = ');
n = 0:L-1;
Not for sale.
40
x = A*cos(omega*n + phi);
stem(n,x);
xlabel('Time Index'); ylabel('Amplitude');
title(['\omega_{o} = ',num2str(omega/pi),'\pi']);
(b)
ωo = 0.28π
1.5
1
1
0.5
0.5
Amplitude
Amplitude
ωo = 0.6π
1.5
0
-0.5
0
-0.5
-1
0
10
20
Time Index
ωo = 0.45π
30
-1.5
40
1.5
1
1
0.5
0.5
0
-0.5
-1
-1.5
0
10
20
Time Index
30
40
ωo = 0.55π
1.5
Amplitude
Amplitude
-1.5
-1
0
-0.5
-1
0
10
20
Time Index
30
-1.5
40
0
10
20
Time Index
30
40
ωo = 0.65π
1.5
Amplitude
1
0.5
0
-0.5
-1
-1.5
0
10
20
Time Index
30
40
M2.4 t = 0:0.001:1;
fo = input('Frequency of sinusoid in Hz = ');
FT = input('Sampling frequency in Hz = ');
g1 = cos(2*pi*fo*t);
plot(t,g1,'-');
xlabel('time'); ylabel('Amplitude'); hold
n = 0:1:FT;
gs = cos(2*pi*fo*n/FT);
plot(n/FT,gs,'o'); hold off
M2.5 t = 0:0.001:0.85;
Not for sale.
41
g1 = cos(6*pi*t); g2 = cos(14*pi*t); g3 =
cos(26*pi*t);
plot(t/0.85,g1,'-', t/0.85, g2, '--', t/0.85, g3,':');
xlabel('time'); ylabel('Amplitude'); hold
n = 0:1:8; gs = cos(0.6*pi*n); plot(n/8.5,gs,'o');
hold off
M2.6 As the length of the moving average filter is increased, the output of the filter gets more
smoother. However, the delay between the input and the output sequences also
increases (This can be seen from the plots generated by Program 2_4.m for various
values of the filter length.)
M2.7 alpha = input('Alpha = ');
y0 = 1; y1 = 0.5*(y0 + (alpha/y0));
while abs(y1-y0)>0.00001
y2 = 0.5*(y1+(alpha/y1));
y0 = y1; y1 = y2;
end
disp('Squre root of alpha is'); disp(y1);
M2.8 format long
alpha = input('Alpha = ');
y0 = 0.3; y = zeros(1,61);
L = length(y) - 1;
y(1) = alpha - y0*y0 + y0; n = 2;
while abs(y(n-1) - y0) > 0.00001
y2 = alpha - y(n-1)*y(n-1) + y(n-1);
y0 = y(n-1); y(n) = y2;
n = n+1;
end
disp('Square root of alpha is');disp(y(n-1));
m = 0:n-2;
err = y(1:n-1) - sqrt(alpha);
stem(m,err);
axis([0 n-2 min(err) max(err)]);
xlabel('Time index n'); ylabel('Error');
title(['\alpha = ',num2str(alpha)]);
The displayed out is
Square root of alpha is
0.84178104293115
Not for sale.
42
α = 0.7086
0.06
Error
0.04
0.02
0
-0.02
-0.04
0
5
10
15
Time index n
20
25
M2.9 {x[ n]} = {− 4, 5, 1, − 2, − 3, 0, 2}, − 3 ≤ n ≤ 3,
{y[ n]} = {6, − 3, − 1, 0, 8, 7, − 2}, − 1 ≤ n ≤ 5,
{w[ n]} = {3, 2, 2, − 1, 0, − 2, 5}, 2 ≤ n ≤ 8.
{rxx [ n]} = {− 8, 10, 14, −11, − 23, −11, 59, −11, − 23, −11, 14, 10, − 8}, − 6 ≤ n ≤ 6.
{ryy [ n ]} = {−12, 48, 29, − 31, − 30, − 27, 163, − 27, − 30, − 31, 29, 48, −12}, − 6 ≤ n ≤ 6.
{rww [ n]} = {15, 4, 6, −12, 6, − 2, 47, − 2, 6, −12, 6, 10, 15}, − 6 ≤ n ≤ 6.
ryy [n]
rxx [n]
200
60
150
Amplitude
Amplitude
40
20
0
50
0
-20
-40
-6
100
-4
-2
0
Lag index
2
4
-50
-6
6
-4
rww[n]
-2
0
Lag index
2
4
6
rxy [n]
60
60
40
20
Amplitude
Amplitude
40
20
0
-20
-40
0
-60
-20
-6
-4
-2
0
Lag index
2
4
6
Not for sale.
-80
-5
0
Lag index
5
43
rxw[n]
ryw[n]
40
60
40
Amplitude
Amplitude
20
0
-20
-40
-6
20
0
-20
-4
-2
0
Lag index
2
4
-40
-6
6
-4
-2
0
Lag index
2
4
6
M2.10 N = input('Length of sequence = ');
n = 0:N-1;
x = exp(-0.8*n);
y = rand(1,N)-0.5+x;
n1 = length(x)-1;
r = conv(y,fliplr(y));
k = (-n1):n1;
stem(k,r);
xlabel('Lag_index'); ylabel('Amplitude');
3
Amplitude
2
1
0
-1
-30
-20
-10
0
10
Lag index
Not for sale.
20
30
44
∞
3.6
(a)
∫ x a (t − t o ) e
− j Ωt
−∞
∞
dt = ∫ x a ( τ) e − jΩ( τ + t o ) dτ obtained using a change of variable
−∞
∞
∞
−∞
−∞
t − t o = τ. Therefore ∫ x a (t − t o ) e − jΩt dt = e − jΩt o ∫ x a (τ) e − jΩτ dτ = e − jΩt o X a ( jΩ).
∞
(b)
∫ x a (t ) e
j Ω o t − j Ωt
e
−∞
(c) x a (t ) =
∞
dt = ∫ x a (t ) e − j (Ω − Ω o )t dt = X ( j (Ω − Ω o ) ).
−∞
∞
∞
1
j Ωt
− j Ωt
dΩ.
∫ X a ( jΩ) e dΩ. Therefore 2 π x a ( −t ) = ∫ X a ( jΩ) e
2π − ∞
−∞
∞
Interchanging t and Ω we get 2 π x a (−Ω) = ∫ X a ( jt ) e − jΩt dt.
−∞
(d) For a positive real constant a the CTFT of x a (at ) is given by
∞
− jΩ t
dt =
∫ x a ( at ) e
−∞
1 ∞
− j (Ω / a )τ
dτ
∫ x a ( τ) e
a
−∞
=
1
a
Xa ( j
Ω
).
a
In a similar manner we
Ω
1
can show that for a negative constant a the CTFT of x a (at ) is given by − X a ( j ).
a
a
CTFT 1
Ω
X a ⎛⎜ j ⎞⎟.
Therefore x a (at ) ↔
a
⎝ a⎠
(e) Differentiating both sides of x a (t ) =
1 ∞
j Ωt
∫ X a ( jΩ) e dΩ get
2 π −∞
dx a (t ) CTFT
dx a (t )
1 ∞
j Ωt
=
↔ jΩ X a ( jΩ).
∫ jΩ X a ( jΩ) e dΩ. Therefore
dt
dt
2π − ∞
∞
3.7
X a ( jΩ) = ∫ x a (t ) e − jΩt dt = X a ( jΩ) e jθ a (Ω) , where θ a (Ω) = arg{X a ( jΩ)}. Thus,
−∞
∞
X a ( − jΩ) = ∫ x a (t ) e jΩt dt. If x a (t ) is a real function of then it follows from the
−∞
definition of X a ( jΩ) and the expression for X a (− jΩ) that X a ( jΩ) and X a (− jΩ) are
complex conjugates. Therefore X a (− jΩ) = X a ( jΩ) and θ a (−Ω) = −θ a (Ω). Or in
other words, for a real , the magnitude spectrum X a ( jΩ) is an even function of Ω and
the phase spectrum θa (Ω) is an odd function of Ω.
3.8
Not for sale
47
∞
3.9
xˆ (t ) = ∫ hHT (t − τ)x ( τ)dτ. where hHT (t ) is the impulse response of the Hilbert
−∞
transformer. Taking the CTFT of both sides we get Xˆ ( jΩ) = H HT ( jΩ) X ( jΩ) where
Xˆ ( jΩ ) and H ( jΩ) denote the CTFTs of xˆ (t ) and h (t ), respectively. Rewriting
HT
(
HT
)
Xˆ ( jΩ) = H HT ( jΩ) X p ( jΩ) + X n ( jΩ) = − j X p ( jΩ) + j X n ( jΩ). As the magnitude and
phase of Xˆ ( jΩ ) are an even and odd function, xˆ (t ) is seen to be real signal. Consider
the complex signal y(t ) = x (t ) + j xˆ (t ) . Its CTFT is then given by
Y ( jΩ) = X ( jΩ) + j Xˆ ( jΩ) = 2 X ( jΩ).
p
3.10
[
]
∞
∞
2
∞
1
1
The total energy ε x = ∫ e − αt dt = ∫ e − 2αt dt =
e − 2 αt 0 =
= 1.
− 2α
2 α α =1 / 2
−∞
−∞
The total energy can also be computed using using the Parsevals’ theorem
εx=
1 ∞
1
dΩ.
∫
2
2
2π
−∞ α +Ω
Ωc
1
1
dΩ
Therefore, the 80% bandwidth Ω c can be found by evaluating
∫
2
2
2π
α
+
Ω
−Ωc
Ω
1 ⎡1
−1 ⎛ Ω ⎞ ⎤ c
=
⋅ tan ⎜ ⎟
2 π ⎢⎣ α
⎝ α ⎠⎥⎦ − Ω
=
2
tan −1 (2Ω c ) = 0.8 .
π
=
c
1 ⎡
−1 ⎛ Ω c ⎞⎟ − tan −1 ⎛⎜ − Ω c
⎢ tan ⎜⎜
⎟
⎜ α
2 πα ⎣
⎝
⎝ α ⎠
⎞⎤
1
−1 ⎛ Ω c
⎟⎟ ⎥ = πα ⋅ tan ⎜⎜ α
⎝
⎠⎦
⎞
⎟⎟
⎠ α =1 / 2
1
0.8 π ⎞
Therefore, Ω c = ⋅ tan⎛⎜
⎟ = 1.5388.
2
⎝ 2 ⎠
1
1
1
3.11 y[ n] = µ[ n] = y ev [ n] + y od [ n], where yev [ n] = ( y[ n] + y[ − n]) = + δ[ n] and
2
2 2
1
2
1
2
1
2
1
2
yod [ n] = ( y[ n] − y[ −n]) = (µ[ n] − µ[ − n]) = µ[ n] − − δ[ n]. Now,
Yev (e jω ) =
∞
∞
⎤ 1
1⎡
1
2
(
2
k
)
+
=
π
δ(ω + 2πk ) + . Since
π
δ
ω
+
π
∑
∑
⎥
⎢
2 ⎣ k = −∞
2
k = −∞
⎦ 2
1
1
1
1
y od [ n] = µ[ n] − − δ[ n], yod [ n − 1] = µ[ n − 1] − − δ[ n − 1]. As a result,
2 2
2 2
1
2
1
2
yod [ n] − y od [ n − 1] = µ[ n] − µ[ n − 1] − δ[ n − 1] + δ[ n] =
1
2
(δ[ n] + δ[ n − 1]).
Taking the DTFT of both sides of the above equation, we get
1 ⎛ 1 + e − jω ⎞
1
1
1
Yod (e jω ) − e − jωYod (e jω ) = 1 + e − jω or Yod (e jω ) = ⎜
− .
⎟=
−
j
ω
−
j
ω
2 ⎝ 1− e
2
2
⎠ 1− e
(
)
Hence, Y (e jω ) = Yev (e jω ) + Yod (e jω ) =
1
1 − e − jω
∞
+ π ∑ δ(ω + 2 πk ).
k = −∞
∞
3.12 The inverse DTFT of X (e jω ) = ∑ 2 πδ(ω + 2 πk ) is given by
k = −∞
Not for sale
48
x[ n] =
1 π
2π
jωn
= 1.
∫ 2πδ(ω) e dω =
2π − π
2π
∞
3.13 Y (e jω ) = ∑ α e − jωn with α < 1. Rewriting we get
n
n = −∞
−1
∞
n = −∞
n=0
∞
∞
n =1
n=0
Y (e jω ) = ∑ α − n e − jωn + ∑ α n e − jωn = ∑ (α e jω ) n + ∑ (α e − jω ) n
=
αe
jω
1 − α e jω
+
1
1 − α e − jω
=
1− α
2
1 − 2α cos ω + α 2
.
∞ ⎛
sin(ωc n) ⎞ − jωn
3.14 G(e jω ) = ∑ ⎜ δ[ n] −
= 1 − H LP (e jω ).
⎟e
n
π
⎠
n = −∞ ⎝
G(e jω )
1
_π
3.15 x[ n] =
_ω
c
0
ωc
π
ω
1 π
1 π
j ω j ωn
jω − jωn
dω.
∫ X (e ) e dω. Hence, x * [ n] =
∫ X * (e ) e
2π − π
2π − π
(a) Since x[n] is real and even, we have X (e jω ) = X * (e jω ). Thus
x[ −n] =
x[ n] =
1 π
j ω − j ωn
dω. Therefore,
∫ X (e ) e
2π − π
1
1 π
jω
jω
− jω
( x[ n] + x[ −n]) =
).
∫ X (e ) cos(ωn)dω. As x[n] is even, X (e ) = X (e
2
2π − π
As a result, the term X (e jω ) cos n(ωn) inside the above integral is even, and hence
x[ n] =
1π
jω
∫ X (e ) cos(ωn)dω.
π0
(b) Since x[n] is real and odd, we have x[ n] = − x[ −n] and X (e jω ) = − X (e − jω ). Thus,
x[ n] =
j π
1
jω
jω
( x[ n] − x[ −n]) =
∫ X (e ) sin(ωn)dω. As a result, the term X (e ) sin(ωn)
2
2π − π
inside the above integral is even, and hence x[ n] =
Not for sale
j π
jω
∫ X (e ) sin(ωn)dω.
2π 0
49
⎛ jω 0 n e jφ − e − jω 0 n e − jφ ⎞
⎟µ[ n]
3.16 x[ n] = Aα sin(ω0 n + φ)µ[ n] = Aα
⎜
⎟
2
j
⎝
⎠
n⎜ e
n
)
(
)
(
n
n
A
A jφ
e α e jω 0 µ[ n] − e − jφ α e − jω 0 µ[ n]. Therefore, the DTFT of x[n] is given
2j
2j
1
1
A
A jφ
by X (e jω ) =
− e − jφ
.
e
j
ω
j
j
ω
j2
j2
1− αe e 0
1 − α e ω e − jω 0
=
3.17 Let x[ n] = α n µ[ n1] with α < 1. Its DTFT was computed in Example 3.6 and is given by
X ( e jω ) =
1
1 − α e − jω
.
∞
(a) x1[ n] = α n µ[ n − 1] with α < 1. Its DTFT is given by X1 (e jω ) = ∑ α n e − jωn
n =1
∞
∞
= ∑ ( α e − jω ) n = ∑ ( α e − jω ) n − 1 =
n =1
n=0
1
1− αe
− jω
−1 =
αe
− jω
1 − α e − jω
.
(b) x 2 [ n] = nα n µ[ n] with α < 1. Note x 2 [ n] = n x[ n] . Therefore, using the
differentiation-in-frequency property in Table 3.4 we get
⎞
dX (e jω )
d ⎛⎜
α e − jω
1
⎟=
X 2 ( e jω ) = j
= j
.
dω
dω ⎜⎝ 1 − α e − jω ⎟⎠ (1 − α e − jω ) 2
(c) x 3 [ n] = α n µ[ n + 1] with α < 1. Its DTFT is given by
X 3 (e
jω
∞
n − jωn
) = ∑α e
n = −1
−1 jω
=α e
∞
n − jωn
+ ∑α e
n=0
−1 jω
=α e
1 ⎛⎜ e jω − α
+
=
α ⎜⎝ 1 − α e − jω
1 − α e − jω
1
(d) x 4 [ n] = nα n µ[ n + 2] with α < 1. Its DTFT is given by
∞
∞
X 4 (e jω ) = ∑ nα ne − jωn = ∑ nα ne − jωn − 2α − 2e j 2ω − α −1e jω. From the results of Part
n = −2
n =0
(b) we observe that
X 4 ( e jω ) =
∞
α e − jω
n=0
(1 − α e − jω ) 2
n − jω n
=
∑ nα e
α e − jω
(1 − α e
− jω 2
. Hence,
− 2 α − 2 e j 2 ω − α − 1e jω .
)
(e) x 5 [ n] = nα n µ[ − n − 1] with α > 1. Its DTFT is given by
Not for sale
50
⎞
⎟.
⎟
⎠
−1
∞
∞
1
n = −∞
m =1
m =0
1 − α − 1e j ω
X 5 (e jω ) = ∑ α n e − jωn = ∑ α − m e jωm = ∑ α − m e jωm − 1 =
−1 =
e jω
α − e jω
.
⎧⎪ n
(f) x 6 [ n] = ⎨α , n ≤ M , Its DTFT is given by
⎪⎩ 0, otherwise.
−1
M
X 6 ( e j ω ) = ∑ α n e − j ωn +
n=0
∑α
− n − jω n
e
n =−M
=
1 − α M +1e − jω( M +1)
1 − α e − jω
+ α M e j ωM ⋅
1 − α M +1e − jω( M +1)
1 − α e − jω
3.18 (a) x a [ n] = µ[ n] − µ[ n − 5]. Let denote µ (e jω ) the DTFT of µ[n]. Using the timeshifting property of the DTFT given in Table 3.4, the DTFT of x a [n] is thus given by
X a (e jω ) = (1 − e − j 5ω ) µ (e jω ) . From Table 3.3, we have
µ ( e jω ) =
∞
1 − e − j 5ω
.
+ ∑ πδ(ω + 2πk ). Therefore, X a (e jω ) =
1 − e jω k = −∞
1 − e jω
1
(b) x b [ n] = α n (µ[ n] − µ[ n − 8]). Let x[ n] = α n µ[ n1] with α < 1. Its DTFT was
1
computed in Example 3.6 and is given by X (e jω ) =
. Now
1 − α e − jω
x b [ n] = x[ n] − x[ n − 8]. Using the time-shifting property of the DTFT given in Table
3.4, the DTFT of x a [n] is thus given by X b (e jω ) = (1 − e − j 8ω ) X (e jω ) =
1 − e − j 8ω
1 − α e − jω
.
(c) x c [ n] = ( n + 1)α n µ[ n] = n α n µ[ n] + α n µ[ n] with α > 1. We can rewrite it as
x c [ n] = x 2 [ n] + x[ n]. The DTFT of x2 [ n] was computed in Problem 3.17(b) and is
given by X 2 (e jω ) =
α e − jω
(1 − α e
and is given by X (e jω ) =
=
3.19
αe
− jω
(1 − α e
− jω 2
+
)
− jω 2
1− αe
)
1
1− αe
1
− jω
and the DTFT of x[n] was computed in Example 3.6
=
− jω
. Therefore X c (e jω ) = X 2 (e jω ) + X (e jω )
1
(1 − α e − jω ) 2
.
⎛ 1 − e − jω(2 N +1) ⎞
N
1, − N ≤ n ≤ N ,
⎟
Then Y1 (e jω ) = ∑ e − jωn = e − jωN ⎜
(a) y1[ n] = ⎧⎨
j
−
ω
0
,
otherwise.
⎜
⎟
⎩
n = −N
⎝ 1− e
⎠
1
sin⎛⎜ ω[ N + ] ⎞⎟
2 ⎠
⎝
=
.
sin(ω / 2)
Not for sale
51
.
− jω( N +1)
N
1− e
1, 0 ≤ n ≤ N ,
(b) y2 [ n] = ⎧⎨
Then Y2 (e jω ) = ∑ e − jωn =
⎩0, otherwise.
n =0
1 − e − jω
⎛ sin(ω[ N + 1] / 2) ⎞
= e − jωN / 2 ⎜⎜
⎟⎟ .
⎝ sin(ω / 2) ⎠
n
⎧⎪
(c) y3 [ n] = ⎨1 − N , − N ≤ n ≤ N , Assume N
⎪⎩ 0,
otherwise.
⎧⎪1, −
1
y 3 [ n] = y 0 [ n] O
* y 0 [ n] where y 0 [ n] = ⎨
N
⎪⎩0,
Y3 (e jω ) =
1
1
Y0 (e jω )Y0 (e jω ) = Y02 (e jω ).
N
N
to be odd. Then we can express
N −1
2
≤n≤
N −1
,
2
Therefore,
otherwise.
Now, from the results of Part (a), we have
sin(ωN / 2 )
1 sin 2 (ωN / 2 )
. Hence, Y3 (e jω ) = ⋅
.
N sin 2 (ω / 2)
sin(ω / 2)
Note: The above result also holds for N even.
Y0 (e jω ) =
⎧N + 1 − n ,
(d) y 4 [ n] = ⎨
0,
⎩
considered in Part (a) and
− N ≤ n ≤ N,
= y1[ n] + Ny3 [ n], where y1[ n] is the sequence
otherwise,
y3 [ n] is the sequence considered in Part (c). Hence,
1
sin⎛⎜ ω[ N + ]⎞⎟
2
2 ⎠ sin (ωN / 2 )
⎝
+
.
Y4 (e jω ) = Y1 (e jω ) + N ⋅ Y3 (e jω ) =
sin(ω / 2)
sin 2 (ω / 2)
cos(πn / 2 N ), − N ≤ n ≤ N ,
Then
(e) y5 [ n] = ⎧⎨
0,
otherwise.
⎩
1 N − j ( πn / 2 N ) − jωn 1 N j ( πn / 2 N ) − jωn
+
Y5 (e jω ) =
e
e
∑e
∑e
2 n=−N
2 n = −N
⎛
π
⎞
⎛
π
⎞
(
π
1
)
(
π
1
)
1 N − j ⎜⎝ ω − 2 N ⎟⎠ n 1 N − j ⎜⎝ ω + 2 N ⎟⎠ n 1 sin (ω − 2 N )( N + 2 ) 1 sin (ω + 2 N )( N + 2 )
=
+
= ⋅
+ ⋅
.
∑e
∑e
2 n = −N
2 n = −N
2 sin (ω − π ) / 2
2 sin (ω + π ) / 2
2N
2N
3.20
(
)
(
)
(n + m − 1)! n
α µ[ n] with α < 1. We shall prove by induction that the
n! (m − 1)!
1
DTFT of x m [n] is given by X m (e jω ) =
. From Table 3.3, it follows that
(1 − α e − jω ) m
it holds for m = 1. Let m = 2. Then
(n + 1)! n
x 2 [ n] =
α µ[ n] = (n + 1) x1[ n] = nx1[ n] + x1[ n]. Therefore,
n!
Denote x m [ n] =
Not for sale
52
X 2 ( e jω ) =
α e − jω
(1 − α e − jω ) 2
+ 1 − α e − jω =
1
(1 − α e − jω ) 2
, and it also holds for m = 2.
Now, assume that it holds for m. Consider next x m +1[ n] =
(n + m)! n
α µ[ n]
n! (m)!
1
⎛n+m⎞
⎛ n + m ⎞ (n + m − 1)! n
α µ[ n] = ⎜
=⎜
⎟ x m [ n] = ⋅ n ⋅ x m [ n] + x m [ n]. Hence,
⎟
m
⎝ m ⎠
⎝ m ⎠ n! (m − 1)!
⎞
α e − jω
1 d ⎛⎜
1
1
1
⎟+
=
+
X m + 1 ( e jω ) = j
m dω ⎜⎝ (1 − α e − jω ) m ⎟⎠ (1 − α e − jω ) m
(1 − α e − jω ) m +1 (1 − α e − jω ) m
1
.
=
(1 − α e − jω ) m +1
∞
3.21 (a) X a (e jω ) = ∑ δ(ω + 2 πk ). Hence, x a [ n] =
k = −∞
(b) X b (e jω ) =
(
e jω 1 − e jωN
1 − e jω
) = e jω N∑−1e jωn .
n =0
1 π
jωn
∫ δ(ω) e dω = 1.
2π − π
− N +1
Let m = −n. X b (e jω ) = e jω ∑ e − jωm .
m =0
− N +1
Consider the DTFT X (e jω ) = ∑ e − jωm . Its inverse is given by
m =0
1, − ( N − 1) ≤ n ≤ 0,
x[ n] = ⎧⎨
Therefore, by the time-shifting property of the DTFT, the
otherwise.
⎩0,
1, − N ≤ n ≤ −1,
inverse DTFT of X b (e jω ) = e jω X (e jω ) is given by x b [ n] = x[ n + 1] = ⎧⎨
⎩0, otherwise.
⎧3, n = 0,
N
N
⎪
(c) X c (e jω ) = 1 + 2 ∑ cos(ωl) = 2 + ∑ e − jωl . Hence, x c [ n] = ⎨1, 0 < n ≤ N ,
l=0
l = −N
⎪⎩0, otherwise.
(d) X d (e jω ) =
X d ( e jω ) =
− α e − jω
(1 − α e − j
jω 2
)
with α < 1. We can rewrite X d (e jω ) as
dX o (e jω )
1
where X o (e jω ) =
. From Table 3.3, the inverse
dω
1 − α e − jω
DTFT of X d (e jω ) is given by x o [ n] = α n µ[ n]. From Table 3.4, using the
differentiation-in-frequency property the inverse DTFT of X d (e jω ) is thus given by
x d [ n] = n x o [ n] = n α n µ[ n].
Not for sale
53
e j 4ω − e − j 4ω
2j
3.22 (a) H a (e jω ) = sin(4ω) =
1 j 4ω
e
2j
=
ha [ n] = {− j 0.5, 0, 0, 0, 0, 0, 0, 0,
(b) H b (e jω ) = cos(4ω) =
e j 4ω + e − j 4ω
2
e j 5ω − e − j 5 ω
2j
1 − j 4ω
e
. Therefore,
2j
j 0.5}, − 4 ≤ n ≤ 4.
= 0.5e j 4ω + 0.5e − j 4ω . Therefore,
hb [ n] = { 0.5, 0, 0, 0, 0, 0, 0, 0,
(c) H c (e jω ) = sin(5ω) =
−
=
0.5}, − 4 ≤ n ≤ 4.
1 j 5ω
e
2j
−
1 − j 5ω
e
. Therefore,
2j
hc [ n] = {− j 0.5, 0, 0, 0, 0, 0, 0, 0, 0, 0,
(d) H d (e jω ) = cos(5ω) =
e j 5 ω + e − j 5ω
2
j 0.5}, − 5 ≤ n ≤ 5.
= 0.5e j 5ω + 0.5e − j 5ω . Therefore,
hd [ n] = { 0.5, 0, 0, 0, 0, 0, 0, 0, 0, 0,
0.5}, − 5 ≤ n ≤ 5.
⎛ e jω + e − jω ⎞ ⎛ e j 2 ω + e − j 2 ω ⎞
3.23 (a) H1 (e jω ) = 1 + 2 cos(ω) + 3 cos(2ω) = 1 + 2⎜
⎟ + 3⎜
⎟
2
2
⎝
⎠ ⎝
⎠
= 1 + e jω + e − jω + 1.5e j 2ω + 1.5e − j 2 ω . Therefore,
{h1[ n]} = {1.5, 1, 1, 1, 1.5}, − 2 ≤ n ≤ 2.
ω
(b) H 2 (e jω ) = (3 + 2 cos(ω) + 4 cos(2ω)) cos⎛⎜ ⎞⎟ e − jω / 2
⎝2⎠
⎡
⎛ e jω + e − jω ⎞ ⎛ e j 2 ω + e − j 2 ω ⎞⎤ ⎛ e jω / 2 + e − jω / 2 ⎞ − jω / 2
= ⎢3 + 2⎜
⎟e
⎟ + 4⎜
⎟⎥ ⎜
2
2
2
⎠
⎝
⎠ ⎝
⎠⎦ ⎝
⎣
1
= 3 + e jω + e − jω + 2 e j 2 ω + 2 e − j 2 ω 1 + e − jω
2
(
)(
)
= 2 + 1.5 e jω + 2 e − jω + e j 2ω + 1.5 e − j 2ω + e − j 3ω . Hence,
{h2 [ n]} = {1, 1.5, 2, 2, 1.5, 1}, − 2 ≤ n ≤ 3.
(c) H 3 (e jω ) = j [3 + 4 cos( ω) + 2 cos( 2ω)]sin( ω)
⎡
⎛ e jω + e − jω ⎞ ⎛ e j 2 ω + e − j 2 ω ⎞⎤ ⎛ e jω − e − jω ⎞
= j ⎢3 + 4⎜
⎟
⎟ + 2⎜
⎟⎥ ⎜
2
2
2j
⎠
⎝
⎠ ⎝
⎠⎦ ⎝
⎣
=
1
2
(3 + 2 e jω + 2 e − jω + e j2ω + e − j2ω )(e jω − e − jω )
= 3 + 2 e jω + 2 e − jω + 0.5 e j 2ω + 0.5 e − j 2ω . Hence,
{hc [ n]} = {0.5, 2, 3, 2, 0.5}, − 2 ≤ n ≤ 2.
Not for sale
54
(d) H 4 (e jω ) = j[4 + 2 cos(ω) + 3 cos(2ω)]sin(ω / 2) e jω / 2
⎡
⎛ e jω + e − jω ⎞ ⎛ e j 2 ω + e − j 2 ω ⎞⎤ ⎛ e jω / 2 − e − jω / 2 ⎞ − jω / 2
= j ⎢4 + 2⎜
⎟e
⎟ + 3⎜
⎟⎥ ⎜
2
2
2j
⎠
⎝
⎠ ⎝
⎠⎦ ⎝
⎣
=
1
2
(4 + e jω + e − jω + 1.5 e j2ω + 1.5 e − j2ω )(1 − e − jω )
= 1.5 − 0.25 e jω − 1.5 e − jω + 1.5 e j 2ω − 0.5 e − j 2ω − 0.75 e − j 3ω . Hence,
{h4 [ n]} = {− 1.5, − 0.5, − 3, 3, − 0.5, − 3}, − 3 ≤ n ≤ 2.
3.24 Let H (e jω ) and G(e jω ) denote the DTFTs of the sequences h[n] and g[n] , respectively.
(a) Linearity Theorem: F {α h[ n ] + β g [ n ]} =
∞
∞
n = −∞
n = −∞
∞
∑ ( α h[ n ] + β g [ n ]) e
− jω n
n = −∞
= α ∑ h[ n] e − jωn + β ∑ g[ n] e − jωn = α H (e jω ) + β G(e jω ).
∞
(b) Time-reversal Theorem:
∑ h[ −n] e
n = −∞
∞
(c) Time-shifting Theorem:
= e − jωn o
∞
∑ h[ m] e
m = −∞
− jωm
∑ h[ n − no ] e
∞
∑ h[ m] e
jωm
m = −∞
=
∞
∑ h[ m] e
= H (e − jω ).
− jω( m + n o )
m = −∞
= e − jωn o H (e jω ).
∞
= H (e
=
− jωn
n = −∞
(d) Frequency-shifting Theorem:
j ( ω − ωo )
− jωn
(
)
∞
jω n
− jωn
= ∑ h[ n] e − j (ω − ω o ) n
∑ e o h[ n] e
n = −∞
n = −∞
).
3.25 Let H 1(e jω ) = F {h1[ n]}and H 2 (e jω ) = F {h2 [ n]}. From Example 3.8 we have
∞ ⎛ sin(ω n) ⎞
2
H 2 ( e jω ) = ∑ ⎜
⎟
πn ⎠
n = −∞ ⎝
⎧1, 0 ≤ ω ≤ ω2 ,
=⎨
From the result of Problem 3.14 we get
⎩0, ω2 < ω ≤ π.
∞ ⎛
sin(ω1n) ⎞ − jωn ⎧0, 0 ≤ ω ≤ ω1 ,
H1 (e jω ) = ∑ ⎜ δ[ n] −
=⎨
⎟e
πn ⎠
n = −∞ ⎝
⎩1, ω1 < ω ≤ π.
As the impulse response of the cascade is given by h[ n] = h1[ n] O
* h2 [ n] , using the
convolution theorem we obtain the DTFT of the cascade: H (e jω ) = H 1(e jω )H 2 (e jω )
Not for sale
55
⎧0, 0 ≤ ω < ω1 ,
⎪
= ⎨1, ω1 ≤ ω ≤ ω2 ,
⎪0, ω < ω ≤ π.
2
⎩
H(e jω )
1
_ π _ ω _ ω1
2
0
ω1
ω2 π ω
(
∞
)
n = −∞
∞
∞
∞
Y (e jω ) = ∑ y[ n] e − jωn = X ((e jω ) 4 ) = ∑ x[ n] (e − jωn ) 4 = ∑ x[ m / 4] e − jωm .
n = −∞
n = −∞
m = −∞
3.26 Y (e jω ) = X (e j 4ω ) = X (e jω )4 . Now, X (e jω ) = ∑ x[ n] e − jωn . Hence,
x[ n], n = 0, ± 4, ± 8, ± 16,K
Therefore y[ n] = ⎧⎨
otherwise.
⎩ 0,
∞
∞
3.27 X (e jω ) = ∑ x[ n] e − jωn . Therefore, X (e jω / 2 ) = ∑ x[ n] e − j (ω / 2)n and
n = −∞
n = −∞
∞
X (−e jω / 2 ) = ∑ x[ n] (−1) n e − j (ω / 2)n . Thus, we can write
n = −∞
Y (e jω ) =
∞
∑ y[ n] e − jωn =
n = −∞
1
2
{X (e jω / 2 ) + X (−e jω / 2 )}= 12 ∑∞ (x[n] + x[n](−1)n )e − j(ω / 2)n .
n = −∞
∞
⎧
⎪
x[ n] e − j (ω / 2)n , for n even,
x[2n], for n even,
Thus, y[ n] = ⎨ ∑
Hence, y[ n] = ⎧⎨
n = −∞
for n odd.
⎩ 0,
⎪
0,
for n odd.
⎩
3.28 F {x * [ −n]} =
3.29 X ca (e jω ) =
1
2
∞
∑ x * [ − n] e
n = −∞
[X (e
jω
− jωn
∞
∞
n = −∞
n = −∞
= ∑ x * [ n] e jωn = ( ∑ x[ n] e − jωn )* = X *(e jω ) .
]
) − X * ( e − jω ) =
∞
∞
∞
⎞
1⎛ ∞
= ⎜⎜ ∑ x re [ n] e − jωn + j ∑ x im [ n] e − jωn − ∑ x re [ n] e − jωn − j ∑ x im [ n] e − jωn ⎟⎟
2 n = −∞
n = −∞
n = −∞
n = −∞
⎠
⎝
∞
ω, = j ∑ x im [ n] e − jωn = F {j xim [n]}.
n = −∞
3.30
Not for sale
56
|X(e jω )|
0
0.6π
1.4π
2π
3.31 From Table 3.2 we observe that an even real-valued sequence has a real-valued DTFT
and an odd real-valued sequence has an imaginary-valued DTFT.
(a) Since x1[ n] is an odd sequence, it has an imaginary-valued DTFT.
(b) Since x 2 [ n] is an even sequence, it has a real-valued DTFT.
sin(−ωc n) − sin(ωc n) sin(ωc n)
=
=
= x3 [ n]. Since, x3 [ n] is an even
− πn
− πn
πn
sequence, it has a real-valued DTFT.
(c) x3 [ −n] =
(d) Since x 4 [ n] is an odd sequence, it has an imaginary-valued DTFT.
(e) Since x 5 [ n] is an odd sequence, it has an imaginary-valued DTFT.
3.32 From Table 3.2 we observe that an even real-valued sequence has a real-valued DTFT
and an odd real-valued sequence has an imaginary-valued DTFT.
(a) Since Y1 (e jω ) is a real-valued function of ω, its inverse is an even sequence.
(b) Since Y2 (e jω ) is an imaginary-valued function of ω, its inverse is an odd sequence.
(c) Since Y3 (e jω ) is an imaginary-valued function of ω, its inverse is an odd sequence.
3.33 (a) Since H1 (e jω ) is a real-valued function of ω, its inverse is an even sequence.
(b) Since H 2 (e jω ) is a real-valued function of ω, its inverse is an even sequence.
3.34 Let u[ n] = x * [ −n], and let X (e jω ) and U (e jω ) denote the DTFTs of x[n] and u[n],
respectively. From the convolution property of the DTFT given in Table 3.4, the DTFT
jω
jω
jω
jω
of y[ n] = x[ n] O
* u[ n] is given by Y (e ) = X (e )U (e ). From Table 3.1, U (e )
= X * (e jω ). Therefore, Y (e jω ) = X (e jω ) X * (e jω ) = X (e jω )
2
which is a real-valued
function of ω.
3.35 From the frequency-shifting property of the DTFT given in Table 3.4,
F {x[ n] e − jπn / 3} = X (e j (ω + π / 3) ). A sketch of this DTFT is shown below
Not for sale
57
X(e j(ω+π/3) )
_π
n
3.36 {−α µ[ − n − 1]} = X (e
jω
_ 2π _ π
3
3
−1
=
jω
∞
2
Now, 4 ∫ X (e jω ) dω = 2 ∫ X (e jω ) dω = 4π ∑
n
(b) X (e jω )
2
n = −∞
−π
n
0
∞
∞
⎛ e jω ⎞
⎟ .
∑ ⎜
n=0 ⎝ α ⎠
2
1
1− α e
= −α e
n
∞
.
⇒ X (e jω ) =
1
2
1+ α − 2α cos(ω)
.
Hence α = −2. Therefore, x[ n] = (−2) n µ[ −n − 1].
π
2
/ α)
=
− 1 jω
2
∞
1 π
2
jω
∫ X (e ) dω = ∑ x[ n] .
2π − π
n = −∞
1
.
5 + 4 cos(ω)
π
1− (e
jω
e
n =1
1
ω
− n jω n
= − ∑α
n = −∞
From Parseval’s relation,
2
∞
n − j ωn
) = ∑−α e
For α > 1, X (e jω ) = −α −1e jω
(a) X (e jω )
π
0
2
−1
x[ n] = 4π ∑ (−2) n
2
n = −∞
4π
1
1
= 4 π ∑ ⎛⎜ ⎞⎟ = π ∑ ⎛⎜ ⎞⎟ = .
3
n =1 ⎝ 4 ⎠
n=0 ⎝ 4 ⎠
π
=
1
.
3.25 − 3 cos(ω)
2
Now, ∫ X (e jω ) dω =
0
∞
2
2
∞
−1
1 π
2
jω
n
∫ X (e ) dω = π ∑ x[ n] = π ∑ (1.5)
2 −π
n = −∞
n = −∞
∞
n
Hence α = 1.5. Therefore, x[ n] = −(1.5) n µ[ −n − 1].
n
4π 9
4π
4π
4
4
= π ∑ ⎛⎜ ⎞⎟ =
⋅ = .
∑ ⎛⎜ ⎞⎟ =
9
5
5
9
9
9
n =1 ⎝ ⎠
n=0 ⎝ ⎠
(c) Using the differentiation-in-frequency property of the DTFT as given in Table 3.4,
− jω
⎞
d ⎛
1
⎟ = αe
⎜
the inverse DTFT of X (e jω ) = j
is x[ n] = −nα n µ[ −n − 1].
⎟
⎜
−
j
ω
2
−
j
ω
dω ⎝ 1 − α e
)
⎠ (1− α e
Hence, the inverse DTFT of
2
Y ( e jω ) =
π
1
( 5 − 4 e − jω ) 2
2
.
1
(1− α e − jω ) 2
is − (n + 1)α n µ[ −n − 1].
Hence α = 2. Therefore, y[ n] = −(n + 1)2 n µ[ −n − 1] .
π
2
∞
Now, 4 ∫ X (e jω ) dω = 2 ∫ X (e jω ) dω = 4π ∑
0
n = −∞
−π
Not for sale
2
−1
x[ n] = 4π ∑ (n + 1) 2 ⋅ 2 2 n
n = −∞
58
∞
n
9/4
1
= π ∑ ⎛⎜ ⎞⎟ ⋅ n 2 = π
= 4 π.
9 / 16
n=0 ⎝ 4 ⎠
2
∞
6
2
2
dX (e jω )
dω = 2π ∑ n x[ n] = 2π ∑ n x[ n] = 152π. (Using Parseval’s relation with
∫
dω
−∞
−3
−π
π
3.37
differentiation-in-frequency property)
∞
6
n = −∞
∞
n = −2
3.38 (a) X (e j 0 ) = ∑ x[ n] = ∑ x[ n] = 10.
6
(b) X (e jπ ) = ∑ x[ n] e jπn = ∑ x[ n] e jπn = −6.
n = −∞
π
∫ X (e
(c)
jω
n = −2
)dω = 2πx[0] = −2π.
−π
π
∞
2
jω
∫ X (e ) dω = 2 π ∑
(d)
n = −∞
−π
6
2
2
x[ n] = 2π ∑ x[ n] = 120π.
n = −2
π dX (e jω ) 2
6
∞
2
2
dω = 2 π ∑ n x[n] = 2π ∑ n x[n] = 1724π.
(e) ∫
dω
−∞
−2
−π
∞
2
n = −∞
∞
n = −6
3.39 (a) X (e j 0 ) = ∑ x[ n] = ∑ x[ n] = 12.
2
(b) X (e jπ ) = ∑ x[ n] e jπn = ∑ x[ n] e jπn = −12.
n = −∞
π
∫ X (e
(c)
jω
n = −6
)dω = 2πx[0] = −4π.
−π
π
∞
2
jω
∫ X (e ) dω = 2 π ∑
(d)
n = −∞
−π
π
(e)
∫
−π
dX (e jω )
dω
2
∞
2
2
2
x[ n] = 2π ∑ x[ n] = 160π.
n = −6
2
2
2
dω = 2π ∑ n x[ n] = 2π ∑ n x[ n] = 136π.
−∞
−6
3.40 From the differentiation-in-frequency property of the DTFT given in Table 3.4 we
∞
have
∞
∑ n x[ n] e
n = −∞
∑ n x[ n] = j
n = −∞
− jωn
dX (e jω )
dω
=j
dX (e jω )
where X (e jω ) = F {x[ n]}. Therefore,
dω
∞
. From the definition of the DTFT X (e jω ) = ∑ x[ n] e − jωn
n = −∞
ω= 0
Not for sale
59
j
∞
it follows that
j0
∑ x[ n] = X (e ). Therefore, C g =
n = −∞
From Table 3.3, X (e jω ) = F {α n µ[ n]} =
j
dX (e jω )
dω
=
ω= 0
α e − jω
(1− α e − jω ) 2
=
ω= 0
1
1 − α e − jω
α
(1 − α ) 2
dX (e jω )
dω
X (e
ω= 0
j0
.
)
, α < 1. As a result,
and X (e j 0 ) =
1
.
1− α
α
Hence, C g =
.
1− α
3.41 Let G1 (e jω ) = F {g1[ n]}.
(b) Note g 2 [ n] = g1 [ n] + g1 [ n − 4]. Hence, F {g 2 [ n]} = G2 (e jω )
= G1 (e jω ) + e − j 4ωG1 (e jω ) = 1 + e − j 4ω G1 (e jω ).
(
)
(c) Note g 3 [ n] = g1 [ −(n − 3)] + g1 [ n − 4]. Now, F {g1[ −n]} = G1 (e − jω ). Hence,
F {g3 [ n]} = G3 (e jω ) = e − j 3ωG1 (e − jω ) + e − j 4ωG1 (e jω ).
(d) Note g 4 [ n] = g1 [ n] + g1 [ −(n − 7)]. Hence, F {g 4 [ n]} = G 4 (e jω )
= G1 (e jω ) + e − j 7ωG1 (e − jω ).
∞
⎞
⎞⎛ ∞
⎛ ∞
3.42 Y (e jω ) = X1 (e jω ) X 2 (e jω ), i.e., ∑ y[ n] e − jωn = ⎜⎜ ∑ x1[ n] e − jωn ⎟⎟⎜⎜ ∑ x 2 [ n] e − jωn ⎟⎟.
n = −∞
⎠
⎠⎝ n = −∞
⎝ n = −∞
∞
∞
∞
⎞
⎞⎛
⎛
(a) Setting ω = 0 in the above we get ∑ y[ n] = ⎜⎜ ∑ x1[ n] ⎟⎟⎜⎜ ∑ x 2 [ n] ⎟⎟.
n = −∞
⎠
⎠⎝ n = −∞
⎝ n = −∞
∞
⎛ ∞
⎞⎛ ∞
⎞
(b) Setting ω = π we get ∑ (−1) n y[ n] = ⎜⎜ ∑ (−1) n x1[ n] ⎟⎟⎜⎜ ∑ (−1) n x2 [ n] ⎟⎟.
n = −∞
⎝ n = −∞
⎠⎝ n = −∞
⎠
3.43 x[ n] = α n µ[ n], α < 1. From Table 3.3, F {x[ n]} = X (e jω ) =
of x[n] is E x =
1 π
1
∫
− jω
2π
− π 1− α e
80% bandwidth of the signal, we
2
∞
dω = ∑ ( α 2 ) n =
n=0
1
set E x,80 =
2π
ωc
∫
1
1 − α e jω
. The total energy
4
. To determine the
1 − α 2 α =1 / 2 3
1
=
2
1
− jω
− ω c 1− α e
dω = 0.8 E x = 0.8 ⋅
4
3
⎡ 1 ωc
⎤
3.2
1
dω⎥
=
and solve for ω c , i.e., set E x,80 = ⎢
.
∫
⎢⎣ 2 π − ω c (1− α cos ω) 2 + α 2 sin 2 ω ⎥⎦ α =1 / 2 3
A numerical solution of the above equation yields ωc = 0.5081π.
Not for sale
60
1
2
3.44 Recall x[ n] = x ev [ n] + x od [ n], where x ev [ n] = ( x[ n] + x[ −n]) and As x[n] is causal,
x[ n] = 0 for n < 0 and x[ −n] = 0 for n > 0. Hence, there is no overlap between the
nonzero portions of x[n] and x[ −n] except at n = 0, and we have
x[ n] = 2 x ev [ n]µ[ n] − x ev [0]δ[ n] and x[ n] = 2 x od [ n]µ[ n] + x od [0]δ[ n]. Moreover, since
x[n] is real, it follows from Table 3.2 that F {x ev [ n]} = X re (e jω ) and
F {x ev [ n]} = j X im (e jω ). Taking the DTFT of x[ n] = 2 x ev [ n]µ[ n] − x ev [0]δ[ n] we
arrive at
X ( e jω ) =
1 π
jν
j (ω − ν )
)dν − x[0].
∫ X re (e ) µ (e
π
−π
From Table 3.3 we have
∞
∞
ω ⎞
1⎛
(
2
k
)
1
j
cot(
)
+
πδ(ω + 2πk ).
+
πδ
ω
+
π
=
−
∑
∑
⎟
⎜
2⎝
2 ⎠ k = −∞
1− e − jω k = −∞
Substituting the above in the equation preceding it we get
µ (e jω ) = F {µ[ n]} =
X (e jω ) =
1
1 π
⎡1
X re (e jν )⎢ ⎛⎜1 −
∫
π
⎣2 ⎝
−π
∞
ω − ν ⎞ ⎞⎤
j cot⎛⎜
⎟ ⎟ dν
⎝ 2 ⎠ ⎠⎥⎦
π
+ ∑
∫ X re (e
jν
k = −∞ − π
=
) δ((ω − ν) + 2 πk ) dν − x[0]
j π
1 π
ω− ν ⎞
jν
jν
⎟dν + X re (e jω ) − x[0].
∫ X re (e ) dν −
∫ X re (e ) cot⎛⎜
⎝ 2 ⎠
2π − π
2π − π
Comparing the last equation with X (e jω ) = X re (e jω ) + j X im (e jω ), we arrive at
1 π
ω− ν ⎞
jν
X im (e jω ) = −
⎟dν.
∫ X re (e ) cot⎛⎜
⎝ 2 ⎠
2π − π
Likewise, taking the DTFT of x[ n] = 2 x od [ n]µ[ n] + x od [0]δ[ n] we get
X ( e jω ) =
j π
jν
j (ω − ν )
)dν + x[0].
∫ X im (e ) µ (e
π
−π
jω
Substituting the expression for µ (e
X ( e jω ) =
j π
⎡1
X im (e jν )⎢ ⎛⎜1 −
∫
π
⎣2 ⎝
−π
∞
+j ∑
) given earlier in the above equation we get
ω − ν ⎞ ⎞⎤
j cot⎛⎜
⎟ ⎟ dν
⎝ 2 ⎠ ⎠⎥⎦
π
∫ X im (e
jν
k = −∞ − π
1 π
) δ((ω − ν) + 2πk ) dν + x[0]
j π
ω− ν ⎞
jν
jν
⎟dν + jX im (e jω ) + x[0].
∫ X im (e ) dν + 2 π ∫ X im (e ) cot⎛⎜
2π
2 ⎠
⎝
−π
−π
Comparing the last equation with X (e jω ) = X re (e jω ) + j X im (e jω ), we arrive at
=
Not for sale
61
X re (e jω ) =
1 π
ω− ν ⎞
jν
⎟dν + x[0].
∫ X im (e ) cot⎛⎜
⎝ 2 ⎠
2π − π
3.45 If u[ n] = z n is the input to the LTI discrete-time system, then its output is given by
∞
∞
∞
k = −∞
∞
k = −∞
k = −∞
y[ n] = ∑ h[ k ] u[ n − k ] = ∑ h[ k ] z n − k = z n ∑ h[ k ] z − k = z n H ( z).
where H ( z) = ∑ h[ k ] z − k . Hence is an eigenfunction of the system.
k = −∞
n
If v[ n] = z µ[ n] is the input to the LTI discrete-time system, then its output is given by
∞
∞
n
k = −∞
k = −∞
k = −∞
y[ n] = ∑ h[ k ] v[ n − k ] = z n ∑ h[ k ] µ[ n − k ] z n − k = z n ∑ h[ k ] z − k .
Since in this case the summation depends upon is not an eigenfunction of the system.
3.46 F {h1[ n]} = H1 (e jω ) = F {δ[ n] + δ[ n − 1]} = 1 + 0.5e − jω ,
2
1
F {h2 [ n]} = H 2 (e jω ) = F {1 δ[ n] − 1 δ[ n − 1]} = 0.5 − 0.25e − jω ,
2
4
jω
F {h3 [ n]} = H 3 (e ) = F {2δ[ n]} = 2,
n
F {h4 [ n]} = H 4 (e jω ) = F {−2⎛⎜ 1 ⎞⎟ µ[ n]} =
−2
.
⎝2⎠
1 − 0.5e − jω
The overall frequency response of the structure of Figure 2.35 is given by
H ( e jω ) = H 1 ( e jω ) + H 2 ( e jω ) H 3 ( e jω ) + H 2 ( e jω ) H 4 ( e jω )
= 1 + 0.5e − jω + 2(0.5 − 0.25e − jω ) −
2(0.5 − 0.25e − jω )
1 − 0.5e − jω
= 1.
3.46 Denote H i (e jω ) = F {h1[ n]}, 1 ≤ i ≤ 5.
(a) The overall frequency of Figure P2.2(a) is then given by
H i (e jω ) = H1 (e jω ) H 2 (e jω ) + H 3 (e jω ) H 4 (e jω ) + H1 (e jω )H 2 (e jω ) H 3 (e jω ) H 5 (e jω ).
(b) The structure of Figure P2.2(b) can be redrawn as shown below
h 4[n]
ho[n]
h3[n]
+
where the block with an impulse response represents the part of Figure P2.2(b) with a
feedback loop as shown below
Not for sale
62
w[n]
u[n]
+
h1[n]
h2[n]
v[n]
h5[n]
Let U (e jω ) = F {u[ n]}, V (e jω ) = F {v[ n]}, and W (e jω ) = F {w[ n]}. Then we have
W (e jω ) = U (e jω ) + H 3 (e jω )V (e jω ) and V (e jω ) = H 1(e jω )H 2 (e jω )W (e jω ).
Eliminating W (e jω ) from these two equations we get
(1 −H 1(e jω )H 2(e jω )H 5(e jω ))V (e jω ) =H 1(e jω )H 2(e jω )U (e jω )
which leads to the frequency response of the feedback structure given by
H o ( e jω ) =
V ( e jω )
=
H 1(e jω )H 2 (e jω )
U (e jω ) 1 − H 1(e jω )H 2 (e jω )H 5(e jω )
The overall frequency of Figure P2.2(a) is thus given by
H ( e jω ) = H 4 ( e jω ) + H o ( e jω ) H 3 ( e jω ) = H 4 ( e jω ) +
H 1(e jω )H 2 (e jω )
1 − H 1(e jω )H 2 (e jω )H 5(e jω )
3.48 F {h1[ n]} = H1 (e jω ) = F {2δ[ n − 2] − 3δ[ n + 1]} = 2e − j 2ω − 3e jω ,
F {h2 [ n]} = H 2 (e jω ) = F {δ[ n − 1] + 2δ[ n + 2]} = e − jω + 2e j 2ω ,
F {h3 [ n]} = H 3 (e jω ) = F {5δ[ n − 5] + 7δ[ n − 3] + 2δ[ n − 1] − δ[ n] + 3δ[ n + 1]}
= 5e − j 5ω + 7e − j 3ω + 2e − jω − 1 + 3e jω .
The overall frequency of Figure P2.3 is given by
H (e jω ) = H 3(e jω ) + H 1(e jω ) H 2 (e jω ) = 5e − j 5ω + 7e − j 3ω + 2e − jω − 1 + 3e jω
(
)(
)
+ 2e − j 2ω − 3e jω e − jω + 2e j 2ω = 5e − j 5ω + 9e − j 3ω + 2e − jω + 3e jω − 6e j 3ω .
3.49 Now, hev [n] is the inverse DTFT of H re (e jω ). Rewriting we get
⎛ e jω + e − jω ⎞ ⎛ e j 2ω + e − j 2ω ⎞ ⎛ e j 3ω + e − j 3ω ⎞
⎟ + 3⎜
⎟ + 4⎜
⎟
H re (e jω ) = 1 + 2⎜⎜
⎟ ⎜
⎟ ⎜
⎟
2
2
2
⎝
⎠ ⎝
⎠ ⎝
⎠
= 1 + e jω + e − jω + 1.5e j 2 ω + 1.5e − j 2ω + 2e j 3ω + 2e − j 3ω . Its inverse DTFT is
hev [ n] = δ[ n] + δ[ n + 1] + δ[ n − 1] + 1.5δ[ n + 2] + 1.5δ[ n − 2] + 2δ[ n + 3] + 2δ[ n − 3].
Since h[n] is real and causal, and its DTFT H (e jω ) exists, it is also absolutely
summable. Hence, we can reconstruct h[n] from hev [n] as
h[ n] = 2hev [ n]µ[ n] − hev [0]δ[ n] = 2(δ[ n] + δ[ n − 1] + 1.5δ[ n − 2] + 2δ[ n − 3]) − δ[ n]
= δ[ n] + 2δ[ n − 1] + 3δ[ n − 2] + 4δ[ n − 3].
Not for sale
63
.
π
π
1
1
πn
3.50 (a) y a [ n] = sin⎛⎜ ⎞⎟ cos(ωo n) = sin⎛⎜ (ωo + )n ⎞⎟ − sin⎛⎜ (ωo − )n ⎞⎟. Hence, the angular
2
3 ⎠ 2
3 ⎠
⎝ 3⎠
⎝
⎝
π
frequencies present in the output are (ωo ± )n.
3
1 1
(b) yb [ n] = cos3 (ωo n) = cos 2 (ωo n) cos(ωo n) = ⎡ + cos(2ωo n)⎤ cos(ωo n)
⎢⎣ 2 2
⎥⎦
= cos(ωo n) + cos(2ωo n) cos(ωo n) = cos(ωo n) + [cos(3ωo n) + cos(ωo n)]
2
2
2
4
1
1
3
1
1
1
= cos(ωo n) + cos(3ωo n). Hence, the angular frequencies present in the output are
4
4
3ωo and ωo .
(c) yc [ n] = cos(3ωo n). Hence, the angular frequency present in the output is 3ωo .
3.51 F {δ[ n] − αδ[ n − R]} = H (e jω ) = 1 − α e − jωR . Let α = α e jφ . Then the maximum value
of H (e jω ) is 1 + α and the minimum value is 1 − α . There are R peaks of H (e jω )
located at ω = 2 πk / R, 0 ≤ k ≤ R − 1, and R dips located at
ω = (2 k + 1)π / R, 0 ≤ k ≤ R − 1 in the frequency range 0 ≤ ω < 2π.
2
Phase, in radians
2
Magnitude
1.5
1
0.5
0
0
0.5
M −1
1
/
1.5
3.52 G(e jω ) = ∑ α n e − jωn =
n=0
j0
to have G(e
K=
1− α
1− α M
0
-1
-2
2
1 − α M e − jωM
1 − αe
1
− jω
0
0.5
1
/
1.5
2
. Note G(e jω ) = H (e jω ) for α = 1. In order
) = 1, the impulse response should be multiplied by a factor K , where
.
3.53 H (e jω ) = [a1 cos(2ω) + ( a 2 + a3 ) cos(ω) + a 3 ] + j [− a1 sin(2ω) + ( a 2 − a 3 ) sin(ω)].
The frequency response will have zero-phase for a 2 = a3 and a1 = 0 .
3.54 H (e jω ) = a1 + a 2 e − jω + a 3 e − j 2ω + a 4 e − j 3ω + a 5 e − j 4 ω
(
)
(
)
= a1e j 2 ω + a 5 e − j 2ω e − j 2 ω + a 2 e jω + a 4 e − jω e − j 2ω + a 3 e − j 2ω .
Not for sale
64
If a1 = a 5 and a 2 = a 4 , then we can rewrite the above equation as
H (e jω ) = [2 a1 cos(2ω) + 2 a 2 cos(ω) + a3 ]e − j 2 ω which is seen to have a linear phase.
3.55 H (e jω ) = a1e jkω + a 2 e j ( k −1)ω + a 2 e − j ( k − 2)ω + a1e − j ( k − 3)ω
= e jkω (a1 + a 2 e − jω + a 2 e − j 2ω + a1e − j 3ω )
3
2
j ( k − )ω
[
]
=e
a1 (e j 3ω / 2 + e − j 3ω / 2 ) + a 2 (e jω / 2 + e − jω / 2 ) . Hence, H (e jω ) will be a
real function of ω if k = 3 / 2, in which case we have
H (e jω ) = a1 (e j 3ω / 2 + e − j 3ω / 2 ) + a 2 (e jω / 2 + e − jω / 2 ).
3.56 F {aδ[ n] + b δ[ n − 1] + δ[ n − 2]} = H1 (e jω ) = a + b e − jω + e − j 2ω ,
1
1
F {c n µ[ n]} = H 2 (e jω ) =
, and F {d n µ[ n]} = H 3 (e jω ) =
.
− jω
1− ce
1 − d e − jω
The overall frequency response is then H (e jω ) = H1 (e jω ) H 2 (e jω ) H 3 (e jω )
=
a + b e − jω + e − j 2 ω
(1 − c e − jω )(1 − d e − jω )
H ( e jω )
=
=
2
=
. Therefore,
a + b e − jω + e − j 2 ω
a + b e jω + e j 2 ω
(1 − c e − jω )(1 − d e − jω ) (1 − c e jω )(1 − d e jω )
(a 2 + b 2 + 1) + 2b(a + 1) cos(ω) + 2 a cos(2ω)
(1 − 2c cos(ω) + c 2 )(1 − 2d cos(ω) + d 2 )
(a 2 + b 2 + 1) + 2b(a + 1) cos(ω) + 2 a cos(2ω)
(1 + c 2 + d 2 + c 2 d 2 + 2cd ) − 2(c + d )(1 + cd ) cos(ω) + 2cd cos(2ω)
. Hence,
2
H (e jω ) = 1, if a 2 + b 2 + 1 = 1 + c 2 + d 2 + c 2 d 2 + 2cd,
b( a + 1) cos( ω) = −(c + d )(1 + cd ), and a = cd. Substituting a = cd in the equation on the
left we get b = −(c + d ).
α
3.57 Y (e jω ) = X (e jω ) e j arg X (e
jω )
. Therefore, H (e jω ) =
Y ( e jω )
X ( e jω )
= X ( e jω )
α −1
.
Since H (e jω ) is real function of ω, it has zero-phase.
3.58 y[ n] = x[ n] − α y[ n − R ]. Taking the DTFT of both sides we get
Y (e jω ) = X (e jω ) − α e − jωR Y (e jω ). Hence, H (e jω ) =
Not for sale
Y ( e jω )
X ( e jω )
=
1
1+ α e − jωR
.
65
The maximum value of H (e jω ) is
1
1− α
and the minimum value is
1
.
1+ α
There are
peaks and dips in the range 0 ≤ ω < 2π. The locations of the peaks and the dips are given
α
by 1 − α e − jωR = 1 ± α or e − jωR = ± . The locations of the peaks are given by
α
ω = ωk =
2 πk
R
and the locations of the dips are given by ω = ω k =
(2 π +1)k
, 0 ≤ k ≤ R − 1.
R
Plots of the magnitude and the phase responses of H (e jω ) for α = 0.8 and R = 5 are
shown below:
5
1
Phase, in radians
Magnitude
4
3
2
0.5
0
-0.5
1
0
0.5
1
/
1.5
In this case the maximum value is
3.59 A(e
=
jω
)=
b0 + b1e − jω
1 + a1e − jω
-1
2
1
1 − 0 .8
0
0.5
1
/
= 5 and the minimum value is
1.5
2
1
1+ 0.8
= 0.5556.
2
. Thus, we set A(e jω ) = A(e jω ) A * (e jω ) = A(e jω ) A(e − jω )
(b0 + b1e − jω )(b0 + b1e jω ) b02 + b12 + 2b0 b1 cos(ω)
=
= 1.
(1 + a1e − jω )(1 + a1e jω )
1 + a12 + 2a1 cos(ω)
Solution #1: b0 = ±1 and b1 = sgn(b0 )a1 . In which case A(e
jω
)=±
1 + a1e − jω
= 1, a
1 + a1e − jω
trivial solution.
Solution #2: b1 = ±1 and b0 = sgn(b1 )a1 . In which case A(e
3.60 A(e
jω
)=
b0 + b1e − jω
1 + a1e − jω
=
B0 e jφ 0 + B1e jφ1 e − jω
1 + A1e jθ e − jω
jω
)=±
a1 + e − jω
1 + a1e − jω
.
. Thus, we set
2
B e jφ 0 + B1e jφ1 e − jω B0 e − jφ 0 + B1e − jφ1 e jω
A(e jω ) = A(e jω ) A * (e jω ) = 0
⋅
1 + A1e jθ e − jω
1 + A1e − jθ e jω
=
B02 + B12 + 2 B0 B1 cos(ω − φ1 + φ 0 )
1 + A12 + 2 A1 cos(ω − θ)
= 1.
Not for sale
66
Solution #1: B0 = ±1, B1 = sgn( B0 ) A1 , φ1 − φ 0 = θ. In which case
A(e jω ) =
⎛ 1 + A e jθ e − jω ⎞
± e jφ 0 ± A1 e j (φ 0 + θ) e − jω
1
⎟ = ±e jφ 0 implying
= ±e jφ 0 ⎜
jθ − jω
jθ − jω ⎟
⎜
1 + A1 e e
⎝ 1 + A1 e e
⎠
φ 0 = ± π. A trivial solution.
Solution #2: B1 = ±1, B0 = sgn( B1 ) A1 , φ1 − φ 0 = θ. In which case
± A1e j (φ1 − θ) ± e − jω
⎛ A e − jθ + e − jω ⎞
⎟ = ±e jφ1 implying φ = ± π.
= ± e j φ1 ⎜ 1
1
jθ − jω
jθ − jω ⎟
⎜
1 + A1 e e
⎝ 1 + A1 e e
⎠
⎛ a * + e − jω ⎞
⎟.
Hence, a non-trivia solution is A(e jω ) = e jπ ⎜ 1
⎜ 1 + a e − jω ⎟
1
⎝
⎠
A(e jω ) =
cos(ω / 2) cos(ω)
ω
3.61 (a) H a (e jω ) = cosec(ω) = cot⎛⎜ ⎞⎟ − cot(ω) =
−
⎝2⎠
sin(ω / 2) sin(ω)
=
j ( e jω / 2 + e − jω / 2 )
( e jω / 2 − e − jω / 2 )
=j
−
j (e jω + e − jω )
( e jω − e − jω )
(e jω / 2 + e − jω / 2 )(e jω − e − jω ) − (e jω / 2 − e − jω / 2 )(e jω + e − jω )
(e jω / 2 − e − jω / 2 )(e jω − e − jω )
⎞
⎛
e − jω − e − j 2 ω
⎟. Therefore, the input-output relation is given by
= j 2⎜
⎜ 1 − e − jω − e − j 4 ω + e − j 3ω ⎟
⎠
⎝
y[ n] − y[ n − 1] − y[ n − 2] + y[ n − 3] = j 2 x[ n − 1] − j 2 x[ n − 2].
1
2
2 e − jω
. Therefore, the input-output
=
=
cos(ω) e jω + e − jω 1 + e − j 2ω
relation is given by y[ n] + y[ n − 2] = 2 x[ n − 1].
(b) H b (e jω ) = sec(ω) =
(c) H c (e jω ) = cot(ω) =
=
j (1+ e − j 2 ω )
1− e − j 2 ω
.
⎛ e jω + e − jω ⎞ j ( e jω + e − jω )
cos(ω)
j e − j ω ( e j ω + e − jω )
⎟⎟ =
=
= j ⎜⎜
sin(ω)
e jω − e − jω
1− e − j 2 ω
⎝ e jω − e − jω ⎠
Therefore, the input-output relation is given by
y[ n] − y[ n − 2] = j x[ n] + j x[ n − 2].
sin(ω / 2)
− j + j e − jω
1 − e − jω
ω
e j ω / 2 − e − jω / 2
(d) H d (e jω ) = tan⎛⎜ ⎞⎟ =
=
=
.
==
⎝ 2 ⎠ cos(ω / 2) j (e jω / 2 + e − jω / 2 ) j (1+ e − jω )
1 + e − jω
Therefore, the input-output relation is given by y[ n] + y[ n − 1] = − j x[ n] + j x[ n − 1].
3.62 From Eq. (2.20), the input-output relation of a factor-of- L up-sampler is given by
x[ n / L ], n = 0, ± L, ± 2 L, ± 3L,K
y[ n] = ⎧⎨
The DTFT of y[n] is thus given by
otherwise.
⎩ 0,
Not for sale
67
∞
∞
n = −∞
n = −∞
n = mL
Y (e jω ) = ∑ y[ n] e − jωn = ∑ x[ n / L ] e − jωn =
∞
∑ x[ m ] e
− jωmL
m = −∞
= X (e jLω ), where
X (e jω ) = F {x[ n]}.
3.63 G(e jω ) =
X ( e jω ) =
1
1− αe
1
− jLω
− jω
, α < 1. Thus, we can write G(e jω ) = X (e jLω ), where
. From Table 3.3, the inverse DTFT of X (e jω ) is x[ n] = α n µ[ n].
1− αe
Hence, from the results of Problem 3.62, it follows that
x[ n / L ], n = 0, ± L, ± 2 L, ± 3L,K
g[ n] = ⎧⎨
otherwise.
⎩ 0,
3.64 From Table 3.3, H (e jω ) =
1
. Thus, H (e jω ) =
1
and
1.25 − cos(ω)
1 − 0.5 e − jω
⎛ − 0.5 sin(ω) ⎞
⎟⎟. H (e ± jπ / 5 ) = 1.3504 m j 0.6664. Therefore
arg{H (e jω )} = θ(ω) = tan −1 ⎜⎜
1
0
.
5
cos(
)
−
ω
⎝
⎠
H (e ± jπ / 5 ) = 1.5059 and θ( ± π / 5) = m 0.4585 radians.
Now, for an input x[ n] = sin(ωo n)µ[ n], the steady-state output is given by
y[ n] = H (e jω o ) sin (ωo n + θ(ωo ) ). For ωo = π / 5, the steady-state output is therefore
π
π
π
given by y[ n] = H (e jπ / 5 ) sin⎛⎜ n + θ( ) ⎞⎟ = 1.5059 sin sin⎛⎜ n − 0.4585 ⎞⎟.
5
5
⎠
⎝5
⎠
⎝
3.65 H (e jω ) = h[0] + h[1] e − jω + h[0] e − j 2ω = h[0](1 + e − j 2ω ) + h[1] e − jω
= e − jω (2h[0] cos(ω) + h[1]). We require H (e j 0.3 ) = 2h[ 0] cos(0.3) + h[1] = 0
and H (e j 0.6 ) = 2h[ 0] cos(0.6) + h[1] = 1. Solving these two equations we get
h[0] = 3.8461 and h[1] = −6.3487.
3.66 H (e jω ) = h[0](1 + e − j 2ω ) + h[1] e − jω = e − jω (2h[0] cos(ω) + h[1]). We require
H (e j 0.3 ) = 2h[ 0] cos(0.3) + h[1] = 1 and H (e j 0.6 ) = 2h[ 0] cos(0.6) + h[1] = 0. Solving
these two equations we get h[0] = −3.8461 and h[1] = 7.3487.
3.67
3.68 H (e jω ) = h[0](1 + e − j 4ω ) + h[1] (e − jω + e − j 3ω ) + h[2] e − j 2ω
Not for sale
68
= e − j 2ω (2h[0] cos(2ω) + 2h[1] cos(ω) + h[2]). We require
H (e j 0.2 ) = 2 cos(0.4)h[ 0] + 2 cos(0.2)h[1] + h[ 2] = 0,
H (e j 0.5 ) = 2 cos(1.0)h[ 0] + 2 cos(0.5)h[1] + h[ 2] = 1,
H (e j 0.8 ) = 2 cos(1.6)h[ 0] + 2 cos(0.8)h[1] + h[ 2] = 0. Solving these three equations we
get h[ 0] = −13.4866, h[1] = 45.228, h[ 2] = −63.8089, i.e.,
{h[ n]} = {− 13.4866, 45.228, − 63.8089}, 0 ≤ n ≤ 2.
3.69 H (e jω ) = h[0] + h[1] e − jω + h[2] e − j 2ω + h[3] e − j 3ω . Therefore,
H (e j 0 ) = h[0] + h[1] + h[2] + h[3] = 2,
H (e jπ / 2 ) = h[0] + h[1] e − jπ / 2 + h[2] e − jπ + h[3] e − j 3π / 2
= h[ 0] − j h[1] − h[ 2] + j h[3] = 7 − j 3,
H (e jπ ) = h[0] − h[1] + h[2] − h[3] = 0. Since the impulse response is real, the value of
H (e jω ) at ω = 3π / 2 is the conjugate of its value at ω = π / 2, i.e.,
H (e j 3π / 2 ) = H * (e jπ / 2 ) = h[ 0] + j h[1] − h[ 2] − j h[3] = 7 + j 3. Writing the four
equations in matrix form we get
−1
⎡h[0]⎤ ⎡1 1
1
1 ⎤⎡ 2 ⎤ ⎡ 4 ⎤
1
1⎤ ⎡ 2 ⎤
⎡1 1
⎢ h[1] ⎥ ⎢1 − j − 1 j ⎥ ⎢7 − j 3⎥ 1 ⎢1 j − 1 − j ⎥ ⎢7 − j 3⎥ ⎢ 2 ⎥
⎢h[2]⎥ = ⎢1 − 1 1 − 1⎥ ⎢ 0 ⎥ = 4 ⎢1 − 1 1 − 1⎥ ⎢ 0 ⎥ = ⎢− 3⎥, and
⎢ h[3]⎥ ⎢⎣1 j − 1 − j ⎥⎦ ⎢⎣7 + j 3⎥⎦
⎢⎣1 − j − 1 j ⎥⎦ ⎢⎣7 + j 3⎥⎦ ⎢⎣ − 1⎥⎦
⎣
⎦
hence {h[ n] = {4, 2, − 3, − 1}, 0 ≤ n ≤ 3.
3.70 (a) H (e jω ) = h[0] + h[1] e − jω + h[2] e − j 2ω + h[3] e − j 3ω
= h[0] + h[1] e − jω − h[1] e − j 2ω − h[0] e − j 3ω . Therefore,
H (e jπ / 2 ) = h[0] + h[1] e − jπ / 2 − h[1] e − jπ − h[0] e − j 3π / 2
= h[ 0] − j h[1] + h[1] − j h[ 0] = −2 + j 2,
H (e jπ ) = h[0] − h[1] − h[1] + h[0] = 8. Solving these two equations we get
h[0] = 1 and h[1] = −3. Hence, {h[ n]} = {1, − 3, 3, − 1}, 0 ≤ n p 3.
3.71 (a) H (e jω ) = h[0] + h[1] e − jω + h[2] e − j 2ω = h[0] + h[1] e − jω + h[0] e − j 2ω . The two
conditions to be satisfied by the filter are:
H (e j 0.4 π ) = h[0] + h[1] e − j 0.4 π + h[0] e − j 0.8π = 0 and
H (e j 0 ) = h[0] + h[1] + h[0] = 1. Solving these two equations we get h[0] = 0.7236 and
h[1] = −0.4472.
(b) H (e jω ) = 0.7236 − 0.4472 e − jω + 0.7236 e − j 2ω .
Not for sale
69
2
2
Phase, radians
Magnitude
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
0
-1
-2
1
0
0.2
0.4
ω/pi
0.6
0.8
1
ω/pi
3.72 (a) H (e jω ) = h[0] + h[1] e − jω + h[2] e − j 2ω + h[3] e − j 3ω
= h[0] + h[1] e − jω + h[1] e − j 2ω + h[0] e − j 3ω = e − j 3ω / 2 (2h[0] cos(3ω / 2) + 2h[1] cos(ω / 2)).
The two conditions to be satisfied by the filter are:
H (e j 0.2 π ) = 2h[ 0] cos(0.3π) + 2h[1] cos(0.1π) = 0.8,
H (e j 0.5π ) = 2h[ 0] cos(0.75π) + 2h[1] cos(0.25π) = 0.5. Solving these two equations we
get h[0] = 0.0414 and h[1] = 0.395.
(b) H (e jω ) = 0.0414 + 0.395 e − jω + 0.395 e − j 2ω + 0.0414 e − j 3ω .
1
4
Phase, radians
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
2
0
-2
-4
0
0.2
ω/pi
0.4
0.6
0.8
1
ω/pi
3.73 (a) H (e jω ) = h[0] + h[1] e − jω + h[2] e − j 2ω + h[3] e − j 3ω
= h[0] + h[1] e − jω − h[1] e − j 2ω − h[0] e − j 3ω = j e − j 3ω / 2 (2h[0] sin s(3ω / 2) + 2h[1] sin(ω / 2)).
The two conditions to be satisfied by the filter are:
H (e j 0.5π ) = 2h[ 0] sin( 0.75π) + 2h[1] sin s(0.25π) = 0.2,
H (e j 0.8π ) = 2h[ 0] sin(1.2 π) + 2h[1] cos(0.4 π) = 0.7. Solving these two equations we get
h[0] = −0.14 and h[1] = 0.2815.
(b) H (e jω ) = −0.14 + 0.2815 e − jω − 0.2815 e − j 2ω + 0.14 e − j 3ω .
Not for sale
70
1
0.8
0
Phase, radians
Magnitude
1
0.6
0.4
0.2
0
-1
-2
-3
0
0.2
0.4
0.6
0.8
-4
1
0
0.2
0.4
ω/π
0.6
0.8
1
ω/π
3.74 (a) H (e jω ) = h[0] + h[1] e − jω + h[2] e − j 2ω + h[3] e − j 3ω + h[ 4] e − j 4ω
= h[0] + h[1] e − jω − h[1] e − j 3ω − h[0] e − j 4 ω = j e − j 2ω (2h[0] sin s(2ω) + 2h[1] sin( ω)).
The two conditions to be satisfied by the filter are:
H (e j 0.5π ) = 2h[ 0] sin( 0.8π) + 2h[1] sin s(0.4 π) = 0.8,
H (e j 0.8 π ) = 2h[ 0] sin(1.6 π) + 2h[1] cos(0.8π) = 0.2. Solving these two equations we get
h[0] = 0.112 and h[1] = 0.3514.
1
4
0.8
2
Phase, radians
Magnitude
(b) H (e jω ) = 0.112 + 0.3514e − jω − 0.3514 e − j 3ω − 0.112 e − j 4ω .
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
0
-2
-4
0
0.2
0.4
0.6
0.8
1
ω/ π
ω/π
3.75 (a) H A (e jω ) = 0.3 − e − jω + 0.3 e − j 2ω , H B (e jω ) = 0.3 + e − jω + 0.3 e − j 2ω .
Not for sale
71
|HA(e ω )|
|HB(e ω )|
j
2
2
1.5
1.5
Magnitude
Magnitude
j
1
1
0.5
0
0.5
0
0.2
0.4
0.6
0.8
0
1
0
0.2
0.4
ω/π
0.6
0.8
1
ω/π
It can be seen from the above plots that H A (e jω ) is a highpass filter, whereas H B (e jω )
is a lowpass filter.
(b) H C (e jω ) = H B (e jω ) = H A (e j (ω + π) ).
3.76 y[ n] = y[ n − 1] + 0.5(x[ n] + x[ n − 1]). Taking the DTFT of both sides we get
(
)
Y (e jω ) = e − jω Y (e jω ) + 0.5 X (e jω ) + e − jω X (e jω ) . Hence, the frequency response is
given by H trap (e jω ) =
3.77 y[ n] = y[ n − 2] +
1
3
Y ( e jω )
X (e jω )
=
1 ⎛⎜ 1 + e − jω ⎞⎟
.
2 ⎜⎝ 1 − e − jω ⎟⎠
(x[n] + 4 x[ n − 1] + x[ n − 2]).
− jω
+ e − j 2ω
1 ⎛1+ 4e
H simpson (e jω ) = ⎜
3⎜
1 − e − j 2ω
⎝
Hence,
⎞
⎟.
⎟
⎠
2
Trapezoidal
Simpson
Magnitude
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
ω/π
Note: To compare the performances of the Trapezoidal numerical integration formula
with that of the Simpson’s formula, we first observe that if the input is x a (t ) = e jωt , then
the result of integration is y a (t ) = e jωt . Thus, the desired ideal frequency response is
jω
1
Not for sale
72
H (e jω ) =
1
. Hence, we take the ratio of the frequency responses of the approximation
jω
to the ideal, and plot the two curves as indicated on the previous page. From this plot, it
is evident that the Simpson’s formula amplifies high frequencies, whereas, the
trapezoidal formula attenuates them. In the very low frequency range, both formulae
yield results close to the ideal. However, Simpson’s formula is reasonably accurate for
frequencies close to the midband range.
3.78 G (e jω ) = g 0 + g1e − jω + g 2 e − j 2 ω + g 3 e − j 3ω
(
= e − j 3ω / 2 g 0 e j 3ω / 2 + g1e jω / 2 + g 2 e − jω / 2 + g 0 e − j 3ω / 2
)
= e − j 3ω / 2 [ g 0 cos(3ω / 2) + jg 0 sin(3ω / 2) + g 3 cos( −3ω / 2) + jg 3 sin( −3ω / 2)
+ g1 cos(ω / 2) + jg1 sin(ω / 2) + g2 cos(−ω / 2) + jg2 sin(−ω / 2)] ]
= e − j 3ω / 2 [( g 0 + g3 ) cos(3ω / 2) + ( g1 + g 2 ) cos(ω / 2)
+ j ( g 0 − g3 ) sin(3ω / 2) + j ( g1 − g 2 ) cos(ω / 2)].
Thus, if g 0 = g3 and g1 = g 2 , then
G (e jω ) = e − j 3ω / 2 [( g 0 + g3 ) cos(3ω / 2) + ( g1 + g 2 ) cos(ω / 2)] which has a linear phase
θ(ω) = −
3ω
, and
2
hence, a constant group delay.
Alternately, if g 0 = − g3 and g1 = − g 2 , then
G (e jω ) = j e − j 3ω / 2 [( g 0 + g 3 ) sin(3ω / 2) + ( g1 + g 2 ) sin(ω / 2)] which has a linear phase
θ(ω) = −
3ω π
+ , and
2
2
hence, a constant group delay.
⎛ − b sin ω ⎞
⎟⎟ .
3.79 (a) H a (e jω ) = a + b e − jω = a + b cos ω − j b sin ω. Thus, θ H a (ω) = tan −1 ⎜⎜
⎝ a + b cos ω ⎠
d θ H a (ω)
d ⎛ − b sin ω ⎞
1
Hence, τ H a (ω) = −
=−
⋅
⎜
⎟
2 dω ⎝ a + b cos ω ⎠
dω
b
sin
−
ω
⎛
⎞
1+ ⎜
⎟
⎝ a + b cos ω ⎠
=−
=−
(a + b cos ω) 2
2
(a + b cos ω) +(b sin ω)
2
⋅
− (a + b cos ω)b cos ω − (−b sin ω)(−b sin ω)
− ab cos ω − b 2 cos 2 ω − b 2 sin 2 ω
a 2 + b 2 cos 2 ω + 2 ab cos ω + b 2 sin 2 ω
Not for sale
(a + b cos ω) 2
=
b 2 + ab cos ω
a 2 + b 2 + 2 ab cos ω
.
73
(b) Let G b (e jω ) = 1 + c e − jω = 1 + c cos ω − j c sin ω. From the results of Part (a) we
have τ G b (ω) =
c 2 + c cos ω
2
1 + c + 2c cos ω
. Since H b (e jω ) =
1
G b (e
θ H b (ω) = −θGb (ω), we have τ H b (ω) = − τ G b (ω) = −
a + b e − jω
(c) H c (e jω ) =
1+ ce
− jω
jω
=
)
1
1 + c e − jω
c 2 + c cos ω
1 + c 2 + 2c cos ω
,
.
= H a (e jω )H b (e jω ), where H a (e jω ) is the frequency
response of Part (a) and H b (e jω ) is the frequency response of Part (b). Thus,
θ H c (ω) = θ H a (ω) + θ H b (ω), and therefore, τ H c (ω) = τ H a (ω) + τ H b (ω)
=
b 2 + ab cos ω
−
c 2 + c cos ω
.
a 2 + b 2 + 2 ab cos ω 1 + c 2 + 2c cos ω
1
1
(d) H d (e jω ) =
⋅
= H b (e jω )H e (e jω ), where H b (e jω ) is the
− jω
− jω
1+ ce
1+ d e
frequency response of Part (b) and H e (e jω ) is similar in form to H b (e jω ) . Thus,
θ H d (ω) = θ H d (ω) + θ H e (ω), and therefore, τ H d (ω) = τ H b (ω) + τ H e (ω)
=
c 2 + c cos ω
1 + c 2 + 2c cos ω
+
d 2 + d cos ω
1 + d 2 + 2 d cos ω
.
3.80
The group delay of a causal LTI discrete-time system with a frequency response
dθ(ω)
H (e jω ) = H (e jω ) e j θ(ω) is given by τ g (ω) = −
. Now,
dω
d H ( e jω )
dH (e jω )
dθ(ω)
. Hence,
= e jθ(ω)
+ j H (e jω ) e jθ(ω)
dω
dω
dω
− j H (e
jω
)e
jθ(ω)
d H (e jω ) dH (e jω )
dθ(ω)
jθ(ω)
, or, equivalently,
=e
−
dω
dω
dω
d H ( e jω )
dθ(ω)
e jθ(ω)
dH (e jω )
1
−
=
⋅
−
⋅
dω
dω
dω
j H (e jω ) e jθ(ω)
j H (e jω ) e jθ(ω)
=
1
j H ( e jω )
⋅
d H ( e jω )
dω
+j
dH (e jω )
. The first term on the rightjω
ω
d
H (e )
1
⋅
hand side of the above equation is purely imaginary. Hence,
Not for sale
74
⎧ dH (e jω ) ⎫
⎪ j dω ⎪
dθ(ω)
.
τ g (ω) = −
= Re ⎨
jω ⎬
dω
⎪ H (e ) ⎪
⎭
⎩
dH (e jω )
. Rewriting Eq.
dω
*
⎧
⎛ dH (e jω ) ⎞ ⎫
⎧
*⎫
j
ω
j
ω
j
ω
⎞
⎛
⎪ dH (e ) ⎜ j
⎟ ⎪
⎪ dH (e ) ⎜ j dH (e ) ⎟ ⎪
⎜
dω ⎟ ⎪
1 ⎪ j dω
1 ⎪ j dω
⎪
⎠
⎝
d
ω
⎟ ⎬= ⎨
(3.127) we get τ g (ω) = ⎨
+⎜
+
⎬
j
ω
j
ω
j
ω
*
j
ω
2 ⎪ H (e ) ⎜ H ( e ) ⎟ ⎪ 2 ⎪ H ( e )
H
(
e
)
⎪
⎟
⎜
⎠ ⎪⎭
⎝
⎪
⎪⎩
⎪
⎭
⎩
*
⎫
⎧
jω
jω ⎞
⎛
⎪ j dH (e ) H * (e jω ) + ⎜ j dH (e ) ⎟ H (e jω ) ⎪
⎜
dω
dω ⎟
⎪
1⎪
⎠
⎝
= ⎨
⎬
2
2⎪
jω
⎪
H (e )
⎪
⎪
⎭
⎩
*
1
=
Gre (e jω ) + j Gim (e jω ) H re (e jω ) + j H im (e jω )
2
2 H ( e jω )
Since G(e jω ) is the Fourier transform of ng[n], G(e jω ) = j
3.81
[(
1
=
2 H (e
=
jω
)
2
)(
[2G
)
(
)(
+ Gre (e jω ) + j Gim (e jω ) H re (e jω ) + j H im (e jω )
re (e
jω
) H re (e jω ) + 2Gim (e jω ) H im (e jω )
Gre (e jω ) H re (e jω ) + Gim (e jω ) H im (e jω )
H (e
jω
)
2
]
)* ]
.
3.82 (a) H a (e jω ) = 1 + 0.4 e − jω = 1 + 0.4 cos ω − j 0.4 sin ω and thus,
{
}
{
}
Re H a (e jω ) = 1 + 0.4 cos ω and Im H a (e jω ) = −0.4 sin ω. .
G a ( e jω ) = j
{
dH a (e jω )
= j (− j 0.4 e − jω ) = 0.4 cos ω − j 0.4 sin ω. Thus,
dω
}
{
}
Re G a (e jω ) = 0.4 cos ω and Im G a (e jω ) = −0.4 sin ω. . Therefore, using Eq. (3.128) we
get τ H a (ω) =
=
(1 + 0.4 cos ω)(0.4 cos ω) + (−0.4 sin ω)2
(1 + 0.4 cos ω)2 + (−0.4 sin ω)2
0.16 cos 2 ω + 0.16 sin 2 ω + 0.4 cos ω
1 + 0.16 cos 2 ω + 0.16 sin 2 ω + 0.8 cos ω
=
Not for sale
0.16 + 0.4 cos ω
.
1.16 + 0.8 cos ω
75
(b) Let Gb (e jω ) =
1
H b (e
jω
)
= 1 + 0.6 e − jω . Then τ G b (ω) = −τ H b (ω). Then using the
same procedure as in Part (a) we get τ G b (ω) =
τ H b (ω) = −
0.36 + 0.6 cos ω
.
1.36 + 1.2 cos ω
0.36 + 0.6 cos ω
. Therefore,
1.36 + 1.2 cos ω
⎛
⎞
1
⎟ = G a (e jω )Gb (e jω ), where
(c) Let H c (e jω ) = (1 − 0.5 e − jω )⎜
⎜ 1 + 0.3 e − jω ⎟
⎝
⎠
1
. Therefore,
G a (e jω ) = 1 − 0.5 e − jω and Gb (e jω ) =
1 + 0.3 e − jω
τ H c (ω) = τ G a (ω) + τ G b (ω). Then using the same procedure as in Part (a) we get
0.25 − 0.5 cos ω
and using the same procedure as in Part (b) we get
1.25 − cos ω
0.09 + 0.3 cos ω
0.25 − 0.5 cos ω 0.09 + 0.3 cos ω
τ G b (ω) = −
. Hence, τ H c (ω) =
.
−
1.09 + 0.6 cos ω
1.25 − cos ω
1.09 + 0.6 cos ω
τ G a (ω) =
⎛
⎞⎛
⎞
1
1
⎟⎜
⎟ = G a (e jω )Gb (e jω ), where
(d) Let H d (e jω ) = ⎜
⎜ 1 − 0.3 e − jω ⎟⎜ 1 + 0.5 e − jω ⎟
⎝
⎠⎝
⎠
1
1
G a ( e jω ) =
and Gb (e jω ) =
. Therefore,
− jω
1 − 0.3 e
1 + 0.5 e − jω
τ H d (ω) = τ G a (ω) + τ G b (ω). Then using the same procedure as in Part (b) we get
τ G a (ω) =
− 0.09 + 0.3 cos ω
− 0.25 − 0.5 cos ω
and τ G a (ω) =
. Hence,
1.09 − 0.6 cos ω
1.25 + cos ω
⎛ 0.09 − 0.3 cos ω 0.25 + 0.5 cos ω ⎞
⎟.
+
τ G a (ω) = −⎜⎜
1.25 + cos ω ⎟⎠
⎝ 1.09 − 0.6 cos ω
1
3.83 From Table 3.3, H (e jω ) =
H ( e jω ) =
1 + 0.5 e − jω
1
2
=
(1 + 0.5 cos ω) + (0.5 sin ω)
2
1
. Thus,
1 + 0.5 cos ω − j 0.5 sin ω
=
1
1.25 + cos ω
and
⎛ 0.5 sin ω ⎞
⎛ − 0.5 sin ω ⎞
⎟⎟. Now
⎟⎟ = tan −1 ⎜⎜
arg{H (e jω )} = θ(ω) = − tan −1 ⎜⎜
⎝ 1 + 0.5 cos ω ⎠
⎝ 1 + 0.5 cos ω ⎠
1
H ( e jπ / 5 ) =
= 0.6821 + j 0.1427. Therefore,
1 + 0.5 cos(π / 5) − j 0.5 sin(π / 5)
Not for sale
76
⎛ 0.1427 ⎞
H (e jπ / 5 ) = 0.6969 and arg{H (e jπ / 5 )} = θ(π / 5) = tan −1 ⎜
⎟ = 0.2063 radians.
⎝ 0.6821 ⎠
Since for a frequency response with real coefficient impulse response, H (e jω ) is an
even function of ω and θ(ω) is an odd function of ω, we have H (e − jπ / 5 ) = 0.6969 and
θ( − π / 5) = −0.2063.
Now, for an input x[ n] = sin(ωo n) µ[ n], the steady-state output is given by
y[ n] = H (e jω o ) sin (ωo n + θ(ωo ) ). Thus, for ωo = π / 5, the steady-state output is given
π
π
by y[ n] = H (e jπ / 5 ) sin⎛⎜ n + θ(π / 5) ⎞⎟ = 0.6969 sin⎛⎜ n + 0.2063 ⎞⎟.
⎝5
⎠
⎝5
⎠
(
)
3.84 H (e jω ) = h[0] 1 + e − j 2ω + h[1] e − jω = e − jω (2h[0] cos ω + h[1]). We require
2h[ 0] cos( 0.3) + h[1] = 1 and 2h[ 0] cos( 0.7) + h[1] = 0. Solving these two equations we
get h[0] = 2.6248 and h[1] = − 4.015.
2.5
Magnitude
2
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
1.2
ω
Not for sale
77
M3.1 r = 0.9, θ = 0.75
Imaginary part
2
6
0
Amplitude
Amplitude
Real part
8
4
2
0
-2
0
0.5
ω/π
Magnitude Spectrum
-8
1
0
0.5
1
ω/π
Phase Spectrum
Phase, radians
0.5
6
Magnitude
-4
-6
8
4
2
0
-2
0
0.5
ω/π
0
-0.5
-1
-1.5
-2
1
0
0.5
1
ω/π
r = 0.7, θ = 0.5
Real part
Imaginary part
0
3
Amplitude
Amplitude
4
2
1
0
0
0.5
ω/π
Magnitude Spectrum
0
0.5
1
ω/ π
Phase Spectrum
0
Phase, radians
4
Magnitude
-2
-3
1
5
3
2
1
0
-1
0
0.5
ω/π
1
-0.5
-1
-1.5
0
0.5
1
ω/ π
M3.2 It should be noted that Program 3_1.m uses the function freqz to determine the
samples of a DTFT that is rational function in e − jω , i.e., a ratio of polynomials in
e − jω . Their inverse DTFTs are two-sided sequences. However, all sequences of
Not for sale
78
Problem 3.19 except that in Part (b) are two-sided finite-length sequences of length
2 N + 1 , and their DTFTs have both positive and negative powers of e jω . As a result,
the frequency sample computed using freqz should be multiplied by the vector
e jω n N evaluated at the frequency points ω n used in freqz. In Parts (a), (c) and (d),
the phase spectra are the plots of the unwrapped phase obtained using the function
unwrap.
Moreover, the DTFTs of the sequences in Parts (a), (c) and (d) are real functions of ω
and thus have zero phase. More accurate plots of the DTFTs are obtained using the
function zerophase.
sin(21ω / 2 )
1, − 10 ≤ n ≤ 10,
Y1 (e jω ) =
. The plots obtained using
(a) y1[ n] = ⎧⎨
0
,
otherwise,
sin(ω / 2)
⎩
Program 3_1.m are shown below:
-14
20
1
10
0
-10
Magnitude
Amplitude
2
0
0.5
ω/π
Magnitude Spectrum
0.5
1
Phase Spectrum
20
0
15
10
5
0.5
ω/π
0
ω/π
2
0
Imaginary part
-1
25
0
x 10
0
-2
1
Phase, radians
Amplitude
Real part
30
-2
-4
-6
-8
1
0
0.5
1
ω/π
The plot obtained using the function zerophase is shown below:
25
Amplitude
20
15
10
5
0
-5
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
79
⎛ sin(ω[ N + 1] / 2) ⎞
1, 0 ≤ n ≤ N ,
(b) y2 [ n] = ⎧⎨
Then Y2 (e jω ) = e − jωN / 2 ⎜⎜
⎟⎟ . The plots
0
,
otherwise.
⎩
⎝ sin(ω / 2) ⎠
obtained using Program 3_1.m are shown below:
Real part
Imaginary part
15
8
6
Amplitude
Amplitude
10
5
0
-5
0
0.5
ω/π
Magnitude Spectrum
-2
1
0
0.5
1
ω/π
Phase Spectrum
3
Phase, radians
Magnitude
2
0
15
10
5
0
4
0
0.5
ω/π
2
1
0
-1
-2
1
0
0.5
1
ω/π
n
⎧⎪
1 sin 2 (ωN / 2 )
. The plots obtained
(c) y3 [ n] = ⎨1 − N , − N ≤ n ≤ N , Y3 (e jω ) = ⋅
2
N
ω
sin
(
/
2
)
⎪⎩ 0,
otherwise.
using Program 3_1.m are shown below:
Imaginary part
1.5
5
1
Amplitude
Amplitude
Real part
10
0
-5
0
0.5
ω/π
Magnitude Spectrum
0.5
0
1
1
Phase Spectrum
4
Phase, radians
8
Magnitude
0.5
ω/π
10
6
4
2
0
0
0
0.5
ω/π
1
3
2
1
0
0
0.5
1
ω/π
Not for sale
80
The plot obtained using the function zerophase is shown below:
25
Amplitude
20
15
10
5
0
-5
0
0.2
0.4
0.6
0.8
1
ω/π
1
sin⎛⎜ ω[ N + ] ⎞⎟
n
2
⎧⎪
2 ⎠ 1 sin (ωN / 2 )
+ ⋅
.
(d) y 4 [ n] = ⎨ N + 1 − N , − N ≤ n ≤ N , Y4 (e jω ) = N ⋅ ⎝
sin(ω / 2)
N sin 2 (ω / 2)
⎪⎩
0,
otherwise.
-14
Real part
40
2
20
10
0
-10
0
0.5
ω/ π
Magnitude Spectrum
-1
0
0.5
1
ω/ π
Phase Spectrum
Phase, radians
5
30
Magnitude
0
-2
1
40
20
10
0
Imaginary part
1
Amplitude
Amplitude
30
x 10
0
0.5
ω/ π
0
-5
-10
1
0
0.5
1
ω/ π
The plot obtained using the function zerophase is shown below:
25
Amplitude
20
15
10
5
0
-5
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
81
cos(πn / 2 N ), − N ≤ n ≤ N ,
(e) y5 [ n] = ⎧⎨
0,
otherwise.
⎩
Y5 (e
jω
(
π
1
)
(
π
1
)
1 sin (ω − 2 N )( N + 2 ) 1 sin (ω + 2 N )( N + 2 )
+ ⋅
. The plots obtained using
)= ⋅
2 sin (ω + π ) / 2
2 sin (ω − π ) / 2
(
)
2N
(
)
2N
Program 3_1.m are shown below:
-14
Real part
x 10
15
0.5
Amplitude
Amplitude
10
5
0
-5
Imaginary part
0
0.5
0
-0.5
1
0
0.5
ω/π
Magnitude Spectrum
Phase Spectrum
15
Phase, radians
Magnitude
15
10
5
0
1
ω/ π
0
0.5
ω/π
10
5
0
-5
1
0
0.5
1
ω/ π
The plot obtained using the function zerophase is shown below:
25
Amplitude
20
15
10
5
0
-5
0
0.2
0.4
0.6
0.8
1
ω/π
M3.3 (a) X (e jω ) =
0.2418(1 + 0.139 e − jω − 0.3519 e − j 2 ω + 0.139 e − j 3ω + e − j 4ω )
1 + 0.2386 e − jω + 0.8258 e − j 2ω + 0.1393 e − j 3ω + 0.4153 e − j 4 ω
The plots obtained using Program 3_1.m are shown below:
Not for sale
82
Real part
Imaginary part
1
1
0.5
Amplitude
Amplitude
0.5
0
-0.5
0
0.5
ω/ π
Magnitude Spectrum
0
-0.5
-1
1
1
Phase Spectrum
4
Phase, radians
0.8
Magnitude
0.5
ω/π
1
0.6
0.4
0.2
0
0
0
(b) X (e jω ) =
0.5
ω/ π
2
0
-2
-4
1
0
0.5
1
ω/π
0.1397(1 − 0.0911 e − jω + 0.0911 e − j 2ω − e − j 3ω )
1 + 1.1454 e − jω + 0.7275 e − j 2 ω + 0.1205 e − j 3ω
.
The plots obtained using Program 3_1.m are shown below:
Real part
Imaginary part
0.8
0.6
0.4
Amplitude
Amplitude
0.6
0.4
0.2
0.2
0
0
-0.2
0
0.5
ω/ π
Magnitude Spectrum
-0.2
1
1
Phase Spectrum
3
Phase, radians
Magnitude
0.5
ω/ π
0.8
0.6
0.4
0.2
0
0
0
0.5
ω/ π
1
2
1
0
-1
0
0.5
1
ω/ π
M3.4 % Property 1
Not for sale
83
N = 8; % Number of samples in sequence
gamma = 0.5; k = 0:N-1;
x = exp(-j*gamma*k); y = exp(-j*gamma*fliplr(k));
% r = x[-n] then y = r[n-(N-1)]
% so if X1(exp(jw)) is DTFT of x[-n], then
% X1(exp(jw)) = R(exp(jw)) = exp(jw(N-1))Y(exp(jw))
[Y,w] = freqz(y,1,512);
X1 = exp(j*w*(N-1)).*Y;
m = 0:511; w = -pi*m/512;
X = freqz(x,1,w);
% Verify X = X1
% Property 2
k = 0:N-1; y = exp(j*gamma*fliplr(k));
[Y,w] = freqz(y,1,512);
X1 = exp(j*w*(N-1)).*Y;
[X,w] = freqz(x,1,512);
% Verify X1 = conj(X)
% Property 3
y = real(x);
[Y3,w] = freqz(y,1,512);
m = 0:511; w0 = -pi*m/512;
X1 = freqz(x,1,w0);
[X,w] = freqz(x,1,512);
% Verify Y3 = 0.5*(X+conj(X1))
% Property 4
y = j*imag(x); [Y4,w] = freqz(y,1,512);
% Verify Y4 = 0.5*(X-conj(X1))
% Property 5
k = 0:N-1; y = exp(-j*gamma*fliplr(k));
xcs = 0.5*[zeros(1,N-1) x] + 0.5*[conj(y) zeros(1,N-1)];
xacs = 0.5*[zeros(1,N-1) x] - 0.5*[conj(y) zeros(1,N-1)];
[Y5,w] = freqz(xcs,1,512);
[Y6,w] = freqz(xacs,1,512);
Y5 = Y5.*exp(j*w*(N-1));
Y6 = Y6.*exp(j*w*(N-1));
% Verify Y5 = real(X) and Y6 = j*imag(X)
M3.5 N = 8; % Number of samples in sequence
gamma = 0.5; k = 0:N-1;
x = exp(gamma*k); y = exp(gamma*fliplr(k));
xev = 0.5*([zeros(1,N-1) x] + [y zeros(1,N-1)]);
xod = 0.5*([zeros(1,N-1) x] - [y zeros(1,N-1)]);
[X,w] = freqz(x,1,512);
[Xev,w] = freqz(xev,1,512);
[Xod,w] = freqz(xod,1,512);
Xev = exp(j*w*(N-1)).*Xev;
Not for sale
84
Xod = exp(j*w*(N-1)).*Xod;
% Verify real(X) = Xev, and j*imag(X) = Xod
M3.5 N = input('The length of the seqeunce = ');
k = 0:N-1; gamma = -0.5;
g = exp(gamma*k);
% g is an exponential seqeunce
h = sin(2*pi*k/(N/2));
% h is a sinusoidal sequence with period = N/2
[G,w] = freqz(g,1,512); [H,w] = freqz(h,1,512);
% Property 1
alpha = 0.5; beta = 0.25;
y = alpha*g+beta*h; [Y,w] =
freqz(y,1,512);
% Plot Y and alpha*G+beta*H to verify that they are equal
% Property 2
n0 = 12; % Sequence shifted by 12 samples
y2 = [zeros(1,n0) g];
[Y2,w] = freqz(y2,1,512);
G0 = exp(-j*w*n0).*G;
% Plot G0 and Y2 to verify they are equal
% Property 3
w0 = pi/2; % the value of omega0 = pi/2
r = 256; % the value of omega0 in terms of number of
samples
k = 0:N-1; y3 = g.*exp(j*w0*k);
[Y3,w] = freqz(y3,1,512);
k = 0:511;
w = -w0+pi*k/512; % creating G(exp(w-w0))
G1 = freqz(g,1,w);
% Compare G1 and Y3
% Property 4
k = 0:N-1; y4 = k.*g;
[Y4,w] = freqz(y4,1,512);
% To compute derivative we need sample at pi
y0 = ((-1).^k).*g;
G2 = [G(2:512)' sum(y0)]';
delG = (G2-G)*512/pi;
% Compare Y4, delG
% Property 5
y5 = conv(g,h);
[Y5,w] = freqz(y5,1,512);
% Compare Y5 and G.*H
% Property 6
Not for sale
85
y6 = g.*h;
[Y6,w] = freqz(y6,1,512,'whole');
[G0,w] = freqz(g,1,512,'whole');
[H0,w] = freqz(h,1,512,'whole');
% Evaluate the sample value at w = pi/2
% and verify with Y6 at pi/2
H1 = [fliplr(H0(1:129)') fliplr(H0(130:512)')]';
val = 1/(512)*sum(G0.*H1);
% Compare val with Y6(129) i.e., sample at pi/2
% Can extend this to other points similarly
% Parsevals theorem
val1 m = sum(g.*conj(h)); val2 = sum(G0.*conj(H0))/512;
% Compare val1 with val2
M3.7 The DTFT of nh[n] is j
dH ( e jω )
.
dω
Hence, the group delay τ g (ω) can be computed at a
set of N discrete frequency points ω k = 2πk / N , 0 ≤ k ≤ N − 1, as follows:
DFT {n h[ n]} ⎞
τ g (ωk ) = Re⎛⎜
⎟,
⎝ DFT {h[ n]} ⎠
where all DFTs are N –points in length with N greater than or equal to the length of
{h[ n]}.
M3.8 h = [3.8461 -6.3487 3.8461];
[H,w] = freqz(h,1,512);
plot(w/pi,abs(H)); grid
xlabel('\omega/\pi'); ylabel('Magnitude');
Magnitude
15
10
5
0
0
0.2
0.4
0.6
0.8
1
ω/π
M3.9 h = [-13.4866 45.228 -63.8089 45.228 -13.4866];
[H,w] = freqz(h,1,512);
plot(w/pi,abs(H)); grid
xlabel('\omega/\pi'); ylabel(Magnitude);
Not for sale
86
200
Magnitude
150
100
50
0
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
87
Chapter 4
4.1
Let φ(t ) be an arbitrary continuous-time function with a CTFT Φ ( jΩ ), where
∞
∞
~
Φ( jΩ) = ∫ φ(t ) e − jΩt dt. Let φT (t ) = ∑ φ(t + nT ) denote the periodic continuous-
n = −∞
−∞
time function with a period T obtained by a periodic extension of φ(t ). Note that
~
φT (t ) is also given by the convolution of φ(t ) with the periodic impulse train
∞
∞
~
p(t ) = ∑ δ(t + nT ), i.e., φT (t ) = ∫ φ(τ)p(t − τ)dτ.
n = −∞
−∞
~
~
Tthe CTFT of φT (t ) is then given by F{ φT (t )} = Φ( jΩ) ⋅ F { p(t ) }
= Φ ( jΩ ) ⋅
2π ∞
∑δ
T n = −∞
where Ω T =
( j(Ω − nΩT )) =
∞
2π
Φ( jnΩ T )δ
n = −∞ T
∑
( j(Ω − nΩT )),
(4-1)
2π
.
T
∞
~
Now, the Fourier series expansion of φT (t ) = ∑ φ(t + nT ) is given by
n = −∞
∞
~
φT (t ) = ∑ a n e jnΩ T t . A CTFT of both sides of this equation is then
n = −∞
∞
~
F {φT (t )} = ∑ a n ⋅ 2πδ( j (Ω − nΩ T )).
(4-2)
n = −∞
1
Comparing Eqs. (4-1) and (4-2) we arrive at a n = Φ( jnΩ T ). Substituting this
T
~
expression in the Fourier expansion of φT (t ) we therefore arrive at the Poisson’s sum
∞
~
1 ∞
jnΩ T t
formula φT (t ) = ∑ φ(t + nT ) =
.
∑ Φ( jnΩ T ) e
T
n = −∞
n = −∞
4.2
Consider the continuous-time signal g a (t ) = sin(Ω m t ) which is bandlimited to
Ω m . If we sample ga (t ) at a rate Ω T = 2Ω m starting at t = 0 , then all its samples
are zero. Hence, ga (t ) cannot be recovered from its samples obtained by sampling
it at the Nyquist rate Ω T = 2Ω m . As a result, g a (t ) = sin(Ω m t ) must be sampled
at a rate Ω T > 2Ω m to recover it fully from its samples.
4.3
(a) Now, the CTFT of y1 (t ) is given by Y1 ( jΩ) =
1
G ( jΩ ) O
* G a ( jΩ )
2π a
where
Ga ( jΩ) denotes the CTFT of g a (t ) and O
* denotes the frequency-domain
convolution. The highest frequency present in y1 (t ) is therefore twice that of
g a (t ) and hence, the Nyquist frequency of y1 (t ) is 2Ω m .
Not for sale
86
∞
(b) The CTFT of y2 (t ) is given by Y2 ( jΩ) = ∫ g a ( ) e − jΩt dt
3
−∞
t
∞
= 3 ∫ g a (τ) e − j 3Ωτ dτ = 3 G a ( j 3Ω). The highest frequency present in y2 (t ) is
−∞
therefore one-third of that of g a (t ) and hence, the Nyquist frequency of y2 (t ) is
Ω m / 3.
∞
(c) The CTFT of y3 (t ) is given by Y3 ( jΩ) = ∫ g a (3t ) e − jΩt dt
−∞
=
1 ∞
− jΩτ / 3
dτ
∫ g a ( τ) e
3
−∞
1
3
Ω
3
= G a ( j ). The highest frequency present in y3 (t ) is
therefore three times of that of g a (t ) and hence, the Nyquist frequency of y3 (t ) is
3Ω m .
(d) The CTFT of y 4 (t ) is given by
∞ ⎡∞
∞
⎤
⎡∞
⎤
Y4 ( jΩ) = ∫ ⎢ ∫ g a (t − τ)g a (τ)dτ⎥ e − jΩt dt = ∫ g a (τ) ⎢ ∫ g a (t − τ) e − jΩt dt ⎥ dτ
− ∞ ⎣− ∞
−∞
⎦
⎣− ∞
⎦
∞
∞
−∞
−∞
= ∫ g a (τ) e − jΩτ G a ( jΩ) dτ = G a ( jΩ) ∫ g a (τ) e − jΩτ dτ = G a ( jΩ)G a ( jΩ). The
highest frequency present in y 4 (t ) is therefore the same as that of g a (t ) and hence,
the Nyquist frequency of y 4 (t ) is Ω m .
1 ∞
(e) Now g a (t ) =
G a ( jΩ) e jΩt dΩ. Differentiating both sides of this equation
∫
2π
−∞
we get
y 5 (t ) =
dg a (t )
dt
dg a ( t )
dt
=
1 ∞
jΩt
∫ jΩ G a ( jΩ) e dΩ.
2π
−∞
Hence, it follows that the CTFT of
is simply jΩ G a ( jΩ). The highest frequency present in y5 (t ) is
therefore the same as that of g a (t ) and hence, the Nyquist frequency of y5 (t ) is
Ωm .
4.4
By Parseval’s relation, the total energy of g a (t ) is given by
∞
2
1 ∞
1
2
Ωm
2
E g a (t ) = ∫ g a (t ) dt =
∫ G a ( jΩ) dΩ = 2 π ∫ Ga ( jΩ) dΩ. Likewise, the
2π
−Ωm
−∞
−∞
∞
1 π
2
jω
total energy of g[n] is given by E g[ n] = ∑ g[ n] =
∫ G ( e ) dω
2
π
−∞
−π
Not for sale
2
87
4.5
=
Ωm
2
1 π/T
1
1 π/T 1
2
2
G
(
j
Ω
)
d
(
Ω
T
)
=
G
(
j
Ω
)
d
Ω
=
∫ T a
∫
∫ G a ( jΩ) dΩ
a
2 πT
2 πT
2π
−π / T
−π / T
−Ωm
=
1
T
E g a (t ) .
Sampling period T =
FT =
1
T
2 .5
= sec. Hence, the sampling frequency is
5000
= 2000 Hz. Therefore, the highest frequency component that could be
present in the continuous-time signal has a frequency
4.6
20000
= 1000 Hz.
2
Since the continuous-time signal x a (t ) is being sampled at 2 kHz rate, the sampled
version of its i -th sinusoidal component with a frequency Fi will generate discretetime sinusoidal signals with frequencies F i ±2000n, − ∞ < n < ∞. Hence, the
frequencies Fim generated in the sampled version associated with the sinusoidal
components present in are as follows:
F1 = 300 Hz ⇒ F1m = 300, 1700, 2300,K Hz
F2 = 500 Hz ⇒ F2 m = 500, 1500, 2500,K Hz
F3 = 1200 Hz ⇒ F3m = 1200, 800, 3200,K Hz
F4 = 2150 Hz ⇒ F4 m = 2150, 150, 4150,K Hz
F5 = 3500 Hz ⇒ F5m = 3500, 1500, 5500, 500, 7500,K Hz
After filtering by a lowpass filter with a cutoff at 900 Hz, the frequencies of the
sinusoidal components in y a (t ) are 150, 300, 500, 800 Hz.
4.7
One possible set of values for the frequencies present in y a (t ) are: F1 = 350 Hz,
F2 = 575 Hz, F3 = 815 Hz, and F4 = 9650 Hz. Another possible set of values for
the frequencies present in y a (t ) are: F1 = 350 Hz, F2 = 575 Hz, F3 = 815 Hz,
and F4 = 10575 Hz. Hence, the solution is not unique.
4.8
t = nT =
n
.
50
Therefore,
20 πn ⎞
24 πn ⎞
120 πn ⎞
176 πn ⎞
x[ n] = 4 sin⎛⎜
⎟ − 5 cos⎛⎜
⎟ + 3 sin⎛⎜
⎟ + 2 cos⎛⎜
⎟
⎝ 50 ⎠
⎝ 50 ⎠
⎝ 50 ⎠
⎝ 50 ⎠
2 πn ⎞
12 πn ⎞
(10 + 2)πn ⎞
(100 −12)πn ⎞
= 4 sin⎛⎜
⎟ − 5 cos⎛⎜
⎟ + 3 sin⎛⎜
⎟ + 2 cos⎛⎜
⎟
5
25
⎝ 5 ⎠
⎝ 25 ⎠
⎝
⎠
⎝
⎠
2 πn ⎞
12 πn ⎞
2 πn ⎞
(12 πn ⎞
= 4 sin⎛⎜
⎟ − 5 cos⎛⎜
⎟ + 3 sin⎛⎜
⎟ + 2 cos⎛⎜
⎟.
⎝ 5 ⎠
⎝ 25 ⎠
⎝ 5 ⎠
⎝ 25 ⎠
Not for sale
88
4.9
Both channels are being sampled at 45 kHz. Therefore, there are a total of
2 × 45000 = 90000 samples/sec. Each sample is quantized using 12 bits. Hence,
the total bit rate of the two channels after sampling and digitization is 108 kpbs.
4.10 hr (t ) =
sin(Ω c t )
sin(Ω c nT )
. Therefore, hr (nT ) =
. Since T = 2π / ΩT , we have
ΩT t / 2
Ω T nT / 2
⎛ 2 πΩ c n ⎞
sin⎜
⎟
ΩT ⎠
sin( πn)
⎝
. For Ω c = Ω T / 2, we thus have hr (nT ) =
hr (nT ) =
= δ[ n].
πn
πn
4.11 The spectrum of the sampled signal is as shown below:
Xp(jΩ)
1/T
1/2T
_2Ω
Now, T =
2π
2Ω m
=
m
π
Ωm
_
Ω
m
__
3
0
Ωm
. As a result, ωc =
Ωmπ
3Ω m
Ωm
Ω
2 Ωm
π
3
= . Hence after lowpass filtering
the spectrum of the output continuous-time signal y a (t ) will be as shown below:
Ya (jΩ)
m
_Ω
__
0
3
Ω
m
__
3
Ω
4.12 (a) Ω1 = 100π, Ω1 = 150π. Thus, ∆Ω = Ω 2 − Ω1 = 50π. Note ∆Ω is an integer
multiple of Ω 2 . Hence, we choose the sampling angular frequency as
Ω T = 2∆Ω = 100π =
2 ×150 π
,
M
which is satisfied for M = 3. The sampling
frequency is therefore 50 Hz. The CTFT X p ( jΩ) of the sampled sequence and the
frequency response H r ( jΩ) of the desired reconstruction filter are shown below.
X p(jΩ)
M=3
1/T
_ 200π _ 150π _ 100π
_ 50π
0
50π
Not for sale
100π
150π
200π
Ω
89
H r (jΩ)
T
_
150π
_ 100π
0
100π
Ω
150π
(b) Ω1 = 160π, Ω1 = 250π. Thus, ∆Ω = Ω 2 − Ω1 = 90π. Note ∆Ω is not an
integer multiple of Ω 2 . Hence, we extend the bandwidth to the left by assuming
the lowest frequency to be Ω 0 and choose the sampling angular frequency as
Ω T = 2∆Ω = 2(Ω 2 −Ω 0 ) =
2 × 250 π
,
M
which is satisfied for Ω 0 = 125π and M = 2.
The sampling frequency is therefore 125 Hz. The CTFT X p ( jΩ) of the sampled
sequence and the frequency response H r ( jΩ) of the desired reconstruction filter
are shown below.
X p (jΩ)
1/T
_
340π
_
250π _ 160π
_
90π
0
90π
160π
250π
Ω
340π
H r (jΩ)
T
_
250π
_ 160π
0
160π
Ω
250π
(c) Ω1 = 110π, Ω1 = 180π. Thus, ∆Ω = Ω 2 − Ω1 = 70π. Note ∆Ω is not an
integer multiple of Ω 2 . Hence, we extend the bandwidth to the left by assuming
the lowest frequency to be Ω 0 and choose the sampling angular frequency as
Ω T = 2∆Ω = 2(Ω 2 −Ω 0 ) =
2 ×180 π
,
M
which is satisfied for Ω 0 = 90π and M = 2.
The sampling frequency is therefore 90 Hz. The CTFT X p ( jΩ) of the sampled
sequence and the frequency response H r ( jΩ) of the desired reconstruction filter
are shown below.
X p (jΩ)
1/T
_
250π
_
180π
_ 110π
_
70π
0
Not for sale
70π
110π
180π
250π
Ω
90
H r (jΩ)
T
_
4.13
180π
_ 110π
0
110π
Ω
180π
α p = −20 log10 (1 − δ p ) dB and α s = −20 log10 δ s dB. Therefore,
−α p / 20
and δ s = 10 −α s / 20 .
(a) α p = 0.21 dB and α s = 52 dB. Hence, δ p = 0.0239 and δ s = 0.025.
(b) α p = 0.03 dB and α s = 69 dB. Hence, δ p = 0.0034 and δ s = 0.00355.
δ p = 1 − 10
(c) α p = 0.33 dB and α s = 57 dB. Hence, δ p = 0.0373 and δ s = 0.0014.
4.14
H a (s) =
a
a
, and hence,
. Thus, H a ( jΩ) =
jΩ + a
s+a
H a ( jΩ )
2
= H a ( jΩ ) H a ( − jΩ ) =
a
a
a2
⋅
= 2 2.
j Ω + a − jΩ + a
Ω +a
As Ω increases from
2
0 to ∞ , it can be seen that the square-magnitude function H a ( jΩ) and hence,
the magnitude function H a ( jΩ) =
a
Ω2 + a2
decreases monotonically from
H a ( j 0) = 1 to H a ( j∞) = 0. Let Ω c denote the 3 –dB cutoff frequency. Then
2
H a ( jΩ c ) =
4.15
G a (s ) =
G a ( jΩ )
a2
Ω 2c + a 2
1
= , which implies Ω c = a.
2
jΩ
s
, and hence,
. Thus, G a ( jΩ) =
jΩ + a
s+a
2
= G a ( jΩ)G a (− jΩ) =
− jΩ
jΩ
Ω2
⋅
= 2 2.
jΩ + a − jΩ + a
Ω +a
As Ω increases from
0 to ∞ , it can be seen that the square-magnitude function G a ( jΩ)
the magnitude function Ga ( jΩ) =
Ω
Ω2 + a2
2
and hence,
increases monotonically from
Ga ( j 0) = 0 to G a ( j∞) = 1. Let Ω c denote the 3 –dB cutoff frequency. Then
2
G a ( jΩ c ) =
4.16
Ω c2
Ω c2 + a 2
1
= , which implies Ω c = a.
2
s
a
1⎛
s−a⎞ 1
= ⎜1 −
⎟ = ( A1 ( s ) − A2 ( s )) and G a (s ) =
s+a 2⎝ s+a⎠ 2
s+a
1⎛ s−a⎞ 1
s−a
= ⎜1 +
. Now,
⎟ = ( A1 (s ) + A2 (s )), where A1 (s) = 1 and A2 (s ) =
2⎝ s+a⎠ 2
s+a
H a (s) =
Not for sale
91
j Ω − a − jΩ − a jΩ − a jΩ + a
⋅
=
⋅
= 1 for all
j Ω + a − jΩ + a jΩ + a jΩ − a
values of Ω, A1 (s) and A2 (s) are allpass functions.
2
A1 ( jΩ) = 1 and A 2 ( jΩ) =
4.17
H a (s) =
bs
jbΩ
. Thus, H a ( jΩ) =
2
and hence,
jbΩ + Ω o2 − Ω 2
− jbΩ
jbΩ
2
⋅
H a ( j Ω ) = H a ( jΩ ) H a ( − j Ω ) =
2
2
jbΩ + Ω o − Ω − jbΩ + Ω o2 − Ω 2
=
s 2 + bs + Ω o
b2Ω2
(Ω 2o − Ω 2 ) 2 + b 2 Ω 2
. At Ω = 0, H a ( j 0) = 0, at Ω = ∞, H a ( j∞) = 0, and at
Ω = Ω o , H a ( jΩ) has the maximum value of 1. Now,
d H a ( jΩ )
2
dΩ
=
2b 2 Ω(Ω o2 − Ω 2 )(Ω o2 + Ω 2 )
(
(Ω o2
2 2
−Ω ) +b Ω
frequency range 0 ≤ Ω < Ω o ,
Ω o < Ω < ∞,
2
d H a ( jΩ)
)
2 2
d H a ( jΩ)
. It therefore follows that in the
2
dΩ
> 0, and in the frequency range
2
< 0. Hence, in the frequency range 0 ≤ Ω < Ω o ,
dΩ
2
H a ( jΩ) is a monotonically increasing function of Ω and in the frequency range
2
Ω o < Ω < ∞, H a ( jΩ) is a monotonically decreasing function of Ω. Or in other
words, H a (s) has a bandpass magnitude response. The 3 –dB cutoff frequencies
are given by the solution of
2
2 2
2
2
2
2
(Ω o − Ω c ) + b Ω c = 2 b Ω c ,
b 2 Ω 2c
(Ω 2o − Ω 2c ) 2 + b 2 Ω 2c
=
1
,
2
or,
i.e., Ω c4 − (b 2 + 2Ω o2 )Ω c2 + Ω o4 = 0. Substituting
x = Ω 2c in the last equation we get x 2 − (b 2 + 2Ω 2o ) x + Ω o4 = 0. Let x1 = Ω12 and
x 2 = Ω 22 be the two roots of this quadratic equation. Then, x1 x 2 = Ω12 Ω 22 = Ω o4
and x1 + x 2 = Ω12 + Ω 22 = b 2 + 2Ω 2o . Therefore, Ω1Ω 2 = Ω 2o . From the last two
equations we get Ω12 + Ω 22 − 2Ω1Ω 2 = (Ω 2 − Ω1 ) 2 = b 2 + 2Ω 2o − 2Ω 2o = b 2 .
Hence, Ω 2 − Ω1 = b.
Not for sale
92
4.18
G a (s) =
s 2 + Ω 2o
2
Ω o2 − Ω
2
(Ω o2 − Ω 2 ) 2
(Ω o2
Now,
2 2
2
−Ω ) +b Ω
d G a ( jΩ )
dΩ
2
2
=
(
Ω o < Ω < ∞,
2
and hence,
Ω o2 − Ω 2
jbΩ + Ω o2 − Ω 2 − jbΩ + Ω o2 − Ω 2
2b 2 Ω 3 (Ω 2 − Ω o2 )
(Ω o2
d G a ( jΩ)
dΩ
⋅
−Ω
2
. Note G a ( j 0) = G a ( j∞) = 1 and G a ( jΩ o ) = 0.
2 2
2
−Ω ) +b Ω
frequency range 0 ≤ Ω < Ω o ,
G a ( jΩ )
jbΩ + Ω o2
2
s + bs + Ω o
G a ( jΩ) = G a ( jΩ)G a (− jΩ) =
=
Ω o2 − Ω 2
. Thus, G a ( jΩ) =
2
d G a ( jΩ)
)
2 2
. It therefore follows that in the
2
dΩ
< 0, and in the frequency range
2
> 0. Hence, in the frequency range 0 ≤ Ω < Ω o ,
is a monotonically decreasing function of Ω and in the frequency
2
range Ω o < Ω < ∞, G a ( jΩ) is a monotonically increasing function of Ω. Or in
other words, G a (s ) has a bandstop magnitude response.
The 3 –dB cutoff frequencies are given by the solution of
(Ω o2 − Ω c2 ) 2
=
1
2
(Ω o2 − Ω c2 ) 2 + b 2 Ω 2c
4
2
2
2
4
Ω c − (b + 2 Ω o )Ω c + Ω o = 0. This
,
or, 2(Ω o2 − Ω c2 ) 2 = (Ω o2 − Ω 2c ) 2 + b 2 Ω 2c , i.e.,
last equation is exactly the same as in solution of Problem 4.18 from which we get
4.19
Ω1Ω 2 = Ω 2o and Ω 2 − Ω1 = b.
bs
1 ⎛ s 2 − bs + Ω 2o ⎞⎟ 1
= ( A1 (s ) − A2 (s)) and
H a (s ) =
= ⎜1 −
s 2 + bs + Ω 2o 2 ⎜⎝ s 2 + bs + Ω 2o ⎟⎠ 2
s 2 + Ω o2
1 ⎛ s 2 − bs + Ω o2 ⎞⎟ 1
= ( A1 (s) + A2 (s)), where
G a (s) =
= ⎜1 +
s 2 + bs + Ω o2 2 ⎜⎝ s 2 + bs + Ω o2 ⎟⎠ 2
A1 (s) = 1 and A2 (s ) =
s 2 − bs + Ω o2
. Now, A1 ( jΩ) = 1 and A 2 ( jΩ)
2
2
s 2 + bs + Ω o
− Ω 2 − jbΩ + Ω o2 − Ω 2 + jbΩ + Ω o2
= A2 ( jΩ) A2 (− jΩ) =
⋅
= 1, for all values of
− Ω 2 + jbΩ + Ω o2 − Ω 2 − jbΩ + Ω 2o
Ω, A1 (s) and A2 (s) are allpass functions.
Not for sale
93
4.20
(a) Let Ai (s ) =
s + λ*i
. Since the pole of Ai (s ) is strictly in the left-half s –plane
s − λi
and hence, Ai (s ) is causal and stable. Now Ai ( jΩ)
=
2
= Ai ( jΩ) Ai* ( jΩ)
jΩ + λ*i − jΩ + λ i
jΩ + λ*i jΩ − λ i
⋅
=
⋅
= 1. Hence, Ai (s ) is an allpass
jΩ − λ i − jΩ − λ*i
jΩ − λ i jΩ + λ*i
N
function. Since, A(s ) = ∏ A i (s ), it is a product of causal, stable allpass functions,
i =1
and as a result, is also a causal, stable allpass function.
(b) Ai (s )
2
2
=
Ai (s ) Ai* (s ) =
2
s + λ i + 2 Re{sλ i }
s + λ*i s * +λ i
⋅
. Let
=
2
2
s − λ i s * −λ*i
s + λ i − 2 Re{s * λ i }
s = σ + jΩ and λ i = ai + jbi . Then Ai (s )
2
=
2
2
− 2Ωbi ) + 2σai
2
2
− 2Ωbi ) − 2σai
( s + λi
( s + λi
2
Since ai < 0, it follows from the above that Ai (s ) < 1 for σ > 0, Ai (s )
for σ = 0, and Ai (s )
4.21
H a ( jΩ )
2
=
follows then
1 + (Ω / Ω c )
d k D(Ω )
dΩ k
2N
. Define D(Ω) =
1
H a ( jΩ )
= 2 N (2 N − 1)L(2 N − k + 1)
Ω=0
= 1 + (Ω / Ω c ) 2 N . It
2
Ω2N − k
Ω 2c N
= 0 for k = 1, 2,K , N − 1, or, equivalently,
for k = 1, 2,K , N − 1.
4.22
=1
> 1 for σ < 0.
1
d k D(Ω )
dΩ k
2
2
.
. Therefore,
d k H a ( jΩ )
dΩ k
=0
Ω=0
⎛ 1 ⎞
⎟ = −0.25. Therefore, ε 2 = 10 0.025 − 1 = 0.0593. Next, from
10 log10 ⎜⎜
2⎟
⎝1+ ε ⎠
⎛ 1 ⎞
1 Ω
6
⎟ = −25, we get A 2 = 10 2.5 = 316.2278. Now, = s =
10 log10 ⎜⎜
=4
2⎟
k Ω p 1 .5
⎝A ⎠
log10 (1 / k1 )
A2 − 1
1
315.2278
= 3.0943.
=
= 72.9381. Hence, N =
=
log10 (1 / k )
k1
0.0593
ε2
We choose N = 4 as the filter order.
To verify using MATLAB, we use the code fragment
[N,Wn]=buttord(2*pi*1500,2*pi*6000,0.25,25,'s');
and
Not for sale
94
which yields N = 4 and Wn = 18365.51286.
4.23 The poles are given by p l = e j π ( 5 + 2 l ) / , 1 ≤ l ≤ 6 . Hence,
p1 = e j (7π / 12) = −0.2588 + j 0.9659, p2 = e j (9π / 12) = −0.7071 + j 0.7071,
p3 = e j (9π / 12 ) = −0.9659 + j 0.2588, p 4 = e j (11π / 12 ) = p3* = −0.9659 − j 0.2588,
p5 = e j (13π / 12 ) = p2* = −0.7071 − j 0.7071, p6 = e j (15π / 12 ) = p1* = −0.2588 − j 0.9659.
The poles can also be determined in MATLAB using the statement
[z,p,k]=buttap(6) which yields
p =
-0.2588
-0.2588
-0.7071
-0.7071
-0.9659
-0.9659
+
+
+
-
0.9659i
0.9659i
0.7071i
0.7071i
0.2588i
0.2588i
4.24 From Eq. (4.41) of text, TN (Ω) = 2ΩTN −1 (Ω) − TN − 2 (Ω), where TN (Ω) is defined in Eq.
(4.40).
Case 1: Ω ≤ 1. Making use of Eq. (4.40) in Eq. (4.41) we get
(
)
(
)
= 2Ω cos(N cos −1 Ω − cos −1 Ω ) − cos(N cos −1 Ω − 2 cos −1 Ω )
= 2Ω [cos( N cos −1 Ω) cos(cos −1 Ω) + sin( N cos −1 Ω) sin(cos −1 Ω)]
− [cos( N cos −1 Ω) cos(2 cos −1 Ω) + sin( N cos −1 Ω) sin(2 cos −1 Ω)]
T N (Ω) = 2Ω cos ( N − 1) ⋅ cos −1 Ω − cos ( N − 2) ⋅ cos −1 Ω
= 2Ω cos( N cos −1 Ω) cos(cos −1 Ω) − cos( N cos −1 Ω) cos(2 cos −1 Ω)
[
]
= 2Ω 2 cos( N cos −1 Ω) − cos( N cos −1 Ω) 2 cos 2 (cos −1 Ω) − 1
[
]
= cos( N cos −1 Ω) 2Ω 2 − 2Ω 2 + 1 = cos( N cos −1 Ω).
Case 2: Ω > 1. Making use of Eq. (4.40) in Eq. (4.41) we get
(
)
(
)
T N (Ω) = 2Ω cosh ( N − 1) ⋅ cosh −1 Ω − cosh ( N − 2) ⋅ cosh −1 Ω . Using the trigonometric
identities
cosh( A − B) = cosh( A) cosh( B) − sinh( A) sinh( B), sinh( 2 A) = 2 sinh( A) cosh( A), and
cosh(2 A) = 2 cosh 2 ( A) − 1, and following a similar algebra as in Case 1, we can show
T N (Ω) = cosh( N cosh −1 Ω).
4.25
From the solution of Problem 4.22, we have
Not for sale
1
1
= 4 and
= 72.9381. Hence,
k
k1
95
cosh −1 (1 / k1 )
= 2.4151. We choose the filter order as N = 3.
cosh −1 (1 / k )
The filter order obtained using the MATLAB statement
[N,Wn]=cheb1ord(2*pi*1500,2*pi*6000,0.25, 25, 's') results in N=3.
N=
⎛ 1
4.26 10 log10 ⎜⎜
⎝ 1 + ε2
⎞
⎛ 1 ⎞
⎟⎟ = −0.25, which yields ε = 0.2434. 10 log10 ⎜⎜
⎟⎟ = −25, which
⎝ A2 ⎠
⎠
Ω p 1500
0.2434
ε
yields A 2 = 316.2278. Now, k =
=
= 0.25 and k1 =
=
=
2
Ω s 6000
315
.
2278
A −1
= 0.0137. Substituting the value of k in Eq. (4..55a) we get k ' = 0.9682. Then from Eq.
(4.55b) we get ρ 0 = 0.004. Substituting the value ρ0 in Eq. (4.55c) we get ρ = 0.004.
Finally, from Eq. (4.54) we arrive at N = 2.0591. We choose the next higher integer as the
filter order N = 3.
The filter order obtained using the MATLAB statement
[N,Wn]=ellipord(2*pi*1500,2*pi*6000,0.25, 25, 's') results in N=3.
4.27 B N ( s ) = (2 N − 1) B N −1 ( s ) + s 2 B N − 2 (s ), where B1 (s) = s + 1 and B2 (s ) = s 2 + 3s + 3.
(a) Thus, B3 ( s ) = 5 B2 ( s ) + s 2 B1 ( s ) = 5( s 2 + 3s + 3) + s 2 ( s + 1) = s 3 + 6 s 2 + 15s + 15,
B4 ( s ) = 7 B3 ( s ) + s 2 B2 ( s ) = 7( s 3 + 6 s 2 + 15s + 15) + s 2 ( s 2 + 3s + 3)
= s 4 + 10 s 3 + 45s 2 + 105s + 105.
(b) B5 ( s ) = 9 B4 ( s ) + s 2 B3 ( s ) = 9( s 4 + 10 s 3 + 45s 2 + 105s + 105) + s 2 ( s 3 + 6 s 2 + 15s + 15)
= s 5 + 15s 4 + 105s 3 + 420 s 2 + 945s + 945.
ˆ = 2 π × 3. The mapping is thus s =
4.28 Ω p = 2π × 0.24 and Ω
p
ˆ
Ω pΩ
p
sˆ
=
4 π 2 × 0.72
.
sˆ
Denote K = 4 π 2 × 0.72 = 28.4245. Hence, the desired highpass transfer function is given
10
by H HP (sˆ ) = H LP (s ) s = K / sˆ =
3
2
⎛⎜ K ⎞⎟ + 4.309⎛⎜ K ⎞⎟ + 9.2835⎛⎜ K ⎞⎟ + 10
⎝ sˆ ⎠
⎝ sˆ ⎠
⎝ sˆ ⎠
=
=
10 sˆ 3
K 3 + 4.309 K 2 sˆ + 9.2835Ksˆ 2 + 10 sˆ 3
ŝ 3
ŝ 3 + 26.38785 ŝ 2 + 348.15ŝ + 2296.6
=
10 ŝ 3
10 ŝ 3 + 263.8785 ŝ 2 + 3481.5ŝ + 22966
.
ˆ = 2 π × 3. The mapping is thus s =
4.29 Ω p = 2π × 0.9 and Ω
p
ˆ
Ω pΩ
p
sˆ
=
4π 2 × 2.7
. Denote
sˆ
K = 4 π 2 × 2.7 = 106.5917. Hence, the desired lowpass transfer function is given by
Not for sale
96
H LP (s ) = H LP (s) s = K / sˆ =
=
=
⎛⎜ K ⎞⎟
⎝ sˆ ⎠
3
3
2
⎛⎜ K ⎞⎟ + 9.238⎛⎜ K ⎞⎟ + 40.087⎛⎜ K ⎞⎟ + 100
⎝ sˆ ⎠
⎝ sˆ ⎠
⎝ sˆ ⎠
K3
K 3 + 9.238 K 2 sˆ + 40.087 Ksˆ 2 + 100 sˆ 3
12110.735
.
ŝ 3 + 42.729 ŝ 2 + 1049.602 ŝ + 12110.735
ˆ = 2 π × 3 = 6 π, Ω
ˆ
ˆ
4.30 Ω p = 2 π × 0.25 = 0.5π, Ω
o
p 2 − Ω p1 = 2 π(0.5) = π. The mapping is thus
ˆ2
⎛ sˆ 2 + 36π 2 ⎞ sˆ 2 + 36 π 2
sˆ 2 + Ω
o
⎟=
= 0.5π⎜
s = Ωp
.
ˆ
ˆ )
⎟
⎜
ˆ
ˆ
π
s
s
2
−
Ω
sˆ(Ω
p2
p1
⎠
⎝
2
⎡⎛ ˆ 2
⎤
s + 36 π 2 ⎞
⎟⎟ + 367.93⎥
0.01⎢⎜⎜
⎢⎝ 2 sˆ
⎥
⎠
⎣
⎦
H BP (sˆ ) = H LP (s ) s = (sˆ 2 + 36π 2 ) / 2 sˆ =
2
⎛ sˆ 2 + 36 π 2 ⎞
⎛ sˆ 2 + 36 π 2 ⎞
⎟⎟ + 3.895
⎟⎟ + 2.269⎜⎜
⎜⎜
⎠
⎝ 2 sˆ
⎠
⎝ 2 sˆ
4
2
0.01(sˆ + 2182.33 sˆ + 126242.18)
=
.
sˆ 4 + 4.538 sˆ 3 + 726.19 sˆ 2 + 1612.38 sˆ + 126242.18
ˆ = 2π × 6.5 × 10 3 and Ω
ˆ = 2 π × 1.5 × 10 3.
4.31 Ω
p
s
⎛ 1 ⎞
10 log10 ⎜
⎟ = −0.5, and hence, ε 2 = 10 0.05 − 1 = 0.122.
2
⎝ 1+ ε ⎠
1
A2 − 1
⎛ 1 ⎞
=
= 286.2632.
10 log10 ⎜ ⎟ = −40, and hence, A 2 = 10 4. Therefore,
k1
⎝ A2 ⎠
ε2
ˆ
Ω
6.5 13
1 Ω
13
p
Set Ω p = 1. Then Ω s =
=
= . Thus, = s = . The order of the
ˆ
k Ωp
1 .5 3
3
Ω
s
prototype lowpass filter is thus given by N =
log10 (1 / k1 )
= 3.8579. As a result, we
log10 (1 / k )
choose the filter order as N = 4.
The order of the prototype lowpass filter obtained using the MATLAB statement
[N,Wn]=buttord(1,13/3,0.5, 40, 's') results in N=4.
The order of the desired highpass filter is also 4.
4.32
Fˆ p1 = 20 × 10 3 , Fˆ p2 = 45 × 10 3 , Fˆs1 = 10 × 10 3 , and Fˆs 2 = 50 × 10 3. Thus,
Not for sale
97
Fˆ p1 Fˆ p2 = 9 × 10 8 and Fˆs1 Fˆs 2 = 7.5 × 10 8. Since Fˆ p1 Fˆ p 2 > Fˆs1 Fˆs 2 , we can either
increase left stopband edge Fˆs1 or decrease the left passband edge Fˆ p1 to make
Fˆ p1 Fˆ p 2 = Fˆs1 Fˆs 2 . We choose to increase Fˆs1 to a new value given by Fˆs1 = 18 × 10 3 , in
which case Fˆ p1 Fˆ p2 = Fˆs1 Fˆs 2 = Fˆo2 = 9 × 10 8. The center angular frequency of the
ˆ = 2 π × 30 × 10 3. The passband width is
bandpass filter is therefore Ω
o
3
ˆ −Ω
ˆ
Bw = Ω
p1
p 2 = 2 π × 25 × 10 .
To determine the bandedges of the prototype lowpass filter we set Ω p = 1 and thus,
ˆ 2 −Ω
ˆ2
Ω
30 2 − 18 2
o
s1
Ωs = Ω p
=
= 1.28.
ˆ B
18 × 25
Ω
s1 w
Ωp
1
Now, k =
=
= 0.78125. Hence, k ' = 1 − k 2 = 0.62421826 .
Ω s 1.28
⎛ 1
Next, 10 log10 ⎜⎜
⎝ 1 + ε2
⎞
⎟⎟ = −0.25 or equivalently, log10 (1 + ε 2 ) = 0.025 which yields
⎠
⎛ 1 ⎞
⎟⎟ = −50
ε 2 = 10 0.025 − 1 = 0.05925372 5 or ε = 0.243421. Likewise, 10 log10 ⎜⎜
⎝ A2 ⎠
or, equivalently, log10 ( A 2 ) = 5 which yields A 2 = 10 5 = 100000. Therefore,
ε
1 − k'
k1 =
= 7.69768 × 10 − 4 , ρ 0 =
= 0.058635856. As a result,
2(1 + k ' )
A2 − 1
ρ = ρ 0 + 2(ρ 0 ) 5 + 15(ρ 0 ) 9 + 150(ρ 0 )13 = 0.058637246 . Hence,
2 log10 (4 / k1 )
= 6.0328. We choose N = 7 as the order of the prototype lowpass
log10 (1 / ρ)
filter.
Note that the order can also estimated using the specifications of the bandpass filter. To
this end, the statement to use is
[N,Wn]=ellipord([20 45],[15 50],0.25,50,'s') which also yields N=7 as
the order of the prototype lowpass filter. The order of the desired bandpass filter is
therefore 7 × 2 = 14.
N=
4.33 Fˆ p1 = 10 × 10 6 , Fˆ p2 = 70 × 10 6 ,
Fˆ Fˆ = 70 × 1013 and Fˆ Fˆ
Fˆs1 = 20 × 10 6 , and Fˆs 2 = 45 × 10 6. Thus,
13
ˆ ˆ
ˆ ˆ
p1 p2
s1 s 2 = 90 × 10 . Since F p1 F p 2 < Fs1 Fs 2 , we can either
increase left passband edge Fˆ or decrease the left stopband edge Fˆ to make
p1
s1
Fˆ p1 Fˆ p 2 = Fˆs1 Fˆs 2 . We choose to increase Fˆ p1 to a new value given by
Not for sale
98
Fˆ Fˆ
Fˆ p1 Fˆ p2 = s1 s 2 = 12.8571 × 10 6 , in which case Fˆ p1 Fˆ p2 = Fˆs1 Fˆs 2 = Fo2 = 700 × 1012.
Fˆ p2
ˆ −Ω
ˆ = 2 π × 25 × 10 6 and the center angular
The width of the stopband is Bw = Ω
s2
s1
frequency of the stopband is Ω o2 = 4 π 2 × 700 × 1012.
To determine the bandedges of the prototype lowpass filter we set Ω s = 1 resulting in its
ˆ B
Ω
p1 w
= 0.4375.
passband edge Ω p = Ω p
ˆ 2 −Ω
ˆ2
Ω
o
p1
⎛ 1
Now, 10 log10 ⎜⎜
⎝ 1 + ε2
⎞
⎟⎟ = −0.5 or equivalently, log10 (1 + ε 2 ) = 0.05 which yields
⎠
⎛ 1 ⎞
⎟⎟ = −30
ε 2 = 10 0.05 − 1 = 0.1220184543 or ε = 0.349114. Likewise, 10 log10 ⎜⎜
⎝ A2 ⎠
or, equivalently, log10 ( A 2 ) = 3 which yields A 2 = 10 3 = 1000. Therefore,
1
A2 − 1
999
1 Ωs
1
=
=
= 90.4836236.
=
=
= 2.2857 and
k1
ε
0.349114
k Ω p 0.4375
1
1
Substituting the values of and
in Eq. (4.43) we get
k
k1
cosh −1 (90.4836236 )
= 3.5408. We therefore choose N = 4 as the order of the
cosh −1 (2.2857)
prototype lowpass filter. The order of the desired bandstop filter is thus 8.
Using the statement [N,Wn]=cheb1ord(0.4375,1,0.5,30,'s') we get N=4.
Note that the order can also estimated using the specifications of the bandstop filter. To
This end, the statement to use is
[N,Wn]=cheb1ord([10 70],[20 45],0.5,30,'s') which also yields N=4 as
the order of the prototype lowpass filter.
N=
4.34 From Eq. (4.71), the difference in dB in the attenuation levels at Ω p and Ω s is given by
20 N log10 (Ω p / Ω s ). Hence, for Ω o = 2Ω p , the attenuation difference in dB is equal to
20 N log10 2 = 6.0206 N . Likewise, for Ω o = 3Ω p , the attenuation difference in dB is
equal to 20 N log10 3 = 9.5424 N . Finally, for Ω o = 4Ω p , the attenuation difference in
dB is equal to 20 N log10 4 = 12.0412 N .
4.35 The equivalent representation of the D/A converter of Figure 4.48 reduces to the circuit
shown below if j -th bit is ON and the remaining bits are OFF, i.e., a j = 1 and
a k = 0, k ≠ j.
Not for sale
99
Vo,j
_
2N 1
_
2j 1
2j
a j VR
_
2j 2
20
GL
+
Yin
In the above circuit, Yin is the total conductance seen by the load conductance GL which is
N −1
given by Yin = ∑ 2 i = 2 N − 1. The above circuit can be redrawn as indicated below:
i =0
Vo,j
_
Yin _ 2 j 1
_
2j 1
a j VR
GL
+
2 j −1
⋅ a j VR . Using the
Using the voltage-divider relation we then get Vo, j =
Yin + G L
superposition theorem, the general expression for the output voltage Vo is thus given by
⎛
N
RL
2 j −1
⋅ a j V R = ∑ 2 j −1 a j ⎜
⎜ 1 + (2 N − 1) R
j =1
j =1 Yin + G L
L
⎝
N
Vo = ∑
⎞
⎟V .
⎟ R
⎠
4.36 The equivalent representation of the D/A converter of Figure 4.49 reduces to the circuit
shown below on the left if N -th bit is ON and the remaining bits are OFF, i.e., a N = 1 and
a k = 0, k ≠ N ,
Vo,N
G
__
2
G
__
2
aNVR
Vo,N
G
__
2
GL
+
aNVR
G
GL + __
2
+
which simplifies to the circuit shown above on the right.
Using the voltage-divider relation we then get
Vo, N =
G
2
G
G
+GL +
2
2
⋅ a N VR =
RL
⋅ a N VR .
2( R + R L )
The equivalent representation of the D/A converter of Figure 4.49 reduces to the circuit
shown below on the left if ( N − 1) -th bit is ON and the remaining bits are OFF, i.e.,
a N −1 = 1 and a k = 0, k ≠ N − 1,
Not for sale
100
G
G
Vo,N _1
Vo,N _1
G
__
2
G
__
2
G
__
2
aN _ 1VR
G
__
2
G
__
2
GL
+
aN _ 1VR
__
GL + G
2
+
which simplifies to the circuit shown above on the right.
Its Thevenin equivalent circuit is indicated below:
Vo,N _1
G
__
2
G
GL + __
2
+
a___
N _1
VR
2
from which we readily obtain
G
2
a
a
RL
⋅ N −1 V R =
⋅ N −1 V R .
G + GL
2
2( RL + R)
2
Following the same procedure we can show that if the l –th bit is ON and the remaining
bits are OFF, i.e., a l = 1, and a k = 0, k ≠ l, then
a
RL
Vo, l =
⋅ l VR .
2( RL + R) 2 N − l
Hence, in general we have
N
a
RL
⋅ l VR .
Vo = ∑
N −l
l =1 2( R L + R ) 2
Vo, N −1 =
4.37 From the input-output relation of the first-order hold, we get the expression for the impulse
δ(nT ) − δ(nT − T )
response as h f (t ) = δ(nT ) +
(t − nT ), nT ≤ t < (n + 1)T . In the range
T
t
δ(0) − δ(−T )
0 ≤ t < T , the impulse response is given by h f (t ) = δ(0) +
t =1+ .
T
T
Likewise, in the range T ≤ t < 2T , the impulse response is given by
δ(T ) − δ(0)
t
h f (t ) = δ(T ) +
(t − T ) = 1 − . Outside these two ranges, h f (t ) = 0. Hence we
T
T
have
Not for sale
101
h f (t)
2
t
, 0 < t < T,
T
t
h f (t ) = 1 _ , T < t < 2T ,
T
0,
otherwise.
{
1+
1
0
T
2T
t
_1
Using the step function we can write
t⎞
t⎞
⎛
⎛
h f (t ) = ⎜1 + ⎟ [µ(t ) − µ(t − T )] + ⎜1 − ⎟ [µ(t − T ) − µ(t − 2T )]
⎝ T⎠
⎝ T⎠
t
2( t − T )
(t − 2T )
= µ ( t ) + µ( t ) −
µ(t − T ) − 2µ(t − T ) − µ(t − 2T ) +
µ(t − 2T ) + 2µ(t − 2T ).
T
T
T
Taking the Laplace transform of the above equation we arrive at the transfer function
1
1
2 e − sT
e − sT e − 2 sT 1 e − 2 sT
e − 2 sT ⎛ 1 + sT
H f (s) = +
− ⋅
−2
−
+ ⋅
+2
=⎜
s Ts 2 T s 2
s
s
T
s
⎝ T
s2
Hence, the frequency response is given by
− jΩT
⎛ 1 + jΩT ⎞⎛⎜ 1 − e
H f ( jΩ ) = ⎜
⎟
jΩ
⎝ T
⎠⎜⎝
− sT
⎞ ⎛⎜ 1 − e
⎟
s
⎠ ⎜⎝
2
2
⎞
−1
⎟ = T 1 + Ω 2 T 2 ⎛⎜ 2 sin(ΩT / 2) ⎞⎟ e − jΩT e j tan ΩT . A
⎟
⎝ ΩT / 2 ⎠
⎠
plot of the magnitude responses of the zero-order hold and the first-order hold is shown
below:
Amplitude
1.5
← first-order hold
1
← zero-order hold
0.5
0
0
0.5
1
1.5
2
2.5
3
Ω
4.37
From the input-output relation of thelinear interpolator, we get the expression for the
δ(nT ) − δ(nT − T )
impulse response as h f (t ) = δ(nT − T ) +
(t − nT ), nT ≤ t < (n + 1)T . In the
T
δ(0) − δ(−T )
range 0 ≤ t < T , the impulse response is given by h f (t ) = δ(−T ) +
t. Likewise,
T
Not for sale
102
2
⎞
⎟ .
⎟
⎠
in the range T ≤ t < 2T , the impulse response is given by h f (t ) = δ(0) +
δ(T ) − δ(0)
(t − T ).
T
⎧ t
0 ≤ t < T,
⎪ T,
⎪⎪
t
Outside these two ranges, h f (t ) = 0. Hence we have h f (t ) = ⎨2 − , T ≤ t < 2T ,
⎪ T
otherwise.
⎪ 0,
⎪⎩
h f (t)
1
0
t
2T
T
Using the step function we can write
t⎞
t
⎛
h f (t ) = [µ(t ) − µ(t − T )] + ⎜ 2 − ⎟ [µ(t − T ) − µ(t − 2T )]
T⎠
T
⎝
t
2( t − T )
(t − 2T )
= µ(t ) −
µ(t − T ) +
µ(t − 2T ).
T
T
T
Taking the Laplace transform of the above equation we arrive at the transfer function
⎛ 1 − e − sT
−
+
= T⎜
H f (s) =
⎜ sT
s 2T
s 2T
s 2T
⎝
1
2 e − sT
e − 2 sT
2
⎞
⎟ . Hence, the frequency response is given
⎟
⎠
2
2
⎛ 1 − e − jΩT ⎞
⎛ sin(ΩT / 2) ⎞ − jΩT
⎟
⎜
by H f ( jΩ) = T
. A plot of the magnitude
= T⎜
⎟ e
⎜ j ΩT ⎟
⎝ ΩT / 2 ⎠
⎠
⎝
responses of the ideal filter, zero-order hold and the first-order hold is shown below:
Amplitude
1
0.8
← zero-order hold
0.6
← linear interpolator
0.4
0.2
0
0
0.5
1
1.5
2
2.5
3
Ω
M4.1 We use N = 4 and Wn = 18365.512865 computed in Problem 4.22 and use omega
= 0:2*pi:2*pi*10000; to evaluate the frequency points. The gain plot obtained using
Program 4_2 is shown below.
Not for sale
103
Analog Lowpass Filter
Passband Details
0.5
-10
Gain, dB
Gain, dB
0
-20
0
-0.5
-30
-40
0
2000
4000
6000
Frequency, Hz
8000
-1
10000
0
500
1000
1500
Frequency, Hz
2000
2500
M4.2 We use N = 3 computed in Problem 4.23 and Fp = 2*pi*1500 and Rp = 0.25
and use omega = 0:2*pi:2*pi*10000; to evaluate the frequency points. The gain plot
obtained using Program 4_3 is shown below.
Analog Lowpass Filter
Passband Details
0.5
0
Gain, dB
Gain, dB
-10
-20
-30
0
-0.5
-40
-50
0
2000
4000
6000
Frequency, Hz
8000
-1
0
500
1000
1500
Frequency, Hz
2000
M4.3 We replace the statement
Fp = input('Passband edge frequency in Hz = '); with
Fs = input('Stopband edge frequency in Hz = '); replace
Rp = input('Passband ripple in dB = ');
with Rs = input('Minimum stopband attenuation in dB = '); and
replace [num,den] = cheby1(N,Rp,Fp,'s'); with [num,den] =
cheby2(N,Rs,Fs,'s'); to modify Program 4_3.
Next, we run the modified program using N = 3 and Rs = 25, and Fs = 2*pi*6000. The
gain response plot generated by the modified program is shown below.
Not for sale
104
Passband Details
Analog Lowpass Filter
0.5
0
Gain, dB
Gain, dB
-10
-20
-30
0
-0.5
-40
-50
0
2000
4000
6000
Frequency, Hz
-1
8000
0
500
1000
1500
Frequency, Hz
2000
2500
The numerator and the denominator coefficients of the 3rd order Type 2 Chebyshev lowpass
filter can be obtained by typing num and den in the command window:
H LP (s ) =
10138.1864 s 2 + 4.8663294 × 1010
s 3 + 7030.25552 5 s 2 + 2.41983322 54 × 10 7 s + 4.8663294 × 1010
.
M4.4 We use N = 3 and Wn = 9424.777960769379 computed in Problem 4.26 in
Program 4_4 and use omega = [0: 200: 12000*pi]; to evaluate the frequency points. The
gain plot generated by running this program is shown below:
Analog Lowpass Filter
Passband Details
0.5
0
-20
Gain, dB
Gain, dB
-10
-30
-40
0
-0.5
-50
-60
0
1000
2000 3000 4000
Frequency, Hz
5000
6000
-1
0
500
1000
1500
Frequency, Hz
2000
M4.5 The MATLAB program used is as given below:
[N,Wn]=buttord(1,13/3,0.5, 40, 's');
[B,A] = butter(N,Wn,'s');
[num,den]=lp2hp(B,A,2*pi*6500);
figure(1)
[h,w]=freqs(B,A);gain = 20*log10(abs(h));
plot(w,gain);grid
xlabel('\Omega');ylabel('Gain, dB');
title('Analog Lowpass Filter');
figure(2)
[h,w]=freqs(num,den);gain = 20*log10(abs(h));
plot(w/(2*pi),gain);grid
xlabel('Frequency, Hz');ylabel('Gain, dB');
title('Analog Highpass Filter');
Not for sale
105
H LP (s ) =
H HP (s ) =
3.5262257
4
3
s + 3.58086432 s + 6.41129464 s 2 + 6.72423556 s + 3.5262257
,
s4
s 4 + 7.7880 s 3 + 3.0326485 × 10 9 s 2 + 6.91763168 × 1013 s + 7.8897418 × 1017
Prototype Lowpass Filter
Passband Details
0.5
0
Gian, dB
Gian, dB
-10
-20
-30
0
-0.5
-40
-50
0
1
2
3
4
-1
5
0
0.5
Ω
1
1.5
Ω
Analog Highpass Filter
Passband Details
0.5
0
Gain, dB
Gain, dB
-10
-20
-30
0
-0.5
-40
-50
0
0.5
1
Frequency, Hz
1.5
2
4
x 10
-1
0.5
1
1.5
Frequency, Hz
2
4
x 10
M4.6 The MATLAB program used is given below:
[N,Wn] = ellipord(1,1.28,0.25,50,'s');
[B,A] = ellip(N,0.25,50,Wn,'s');
[num,den] = lp2bp(B,A,2*pi*30e3,2*pi*25e3);
figure(1)
omega = [0:0.01:10];
h = freqs(B,A,omega);
gain = 20*log10(abs(h));
plot(omega,gain); grid; axis([0 5 -80 5]);
xlabel('\Omega'); ylabel('Gain, dB');
title('Analog Lowpass Filter');
figure(2)
omega = [0:200:100e3*2*pi];
h = freqs(num,den,omega);
gain = 20*log10(abs(h));
Not for sale
106
.
plot(omega/(2*pi),gain); grid; axis([0 60e3 -80 5]);
xlabel('Frequency in Hz'); ylabel('Gain, dB');
title('Analog Bandpass Filter');
Analog Bandpass Filter
0
0
-20
-20
Gain, dB
Gain, dB
Analog Lowpass Filter
-40
-60
-60
-80
-40
-80
0
1
2
3
4
5
0
1
2
3
4
Frequency in Hz
Ω
H LP (s ) =
6
4
5
6
4
x 10
2
0.0185 s + 0.1364 s + 0.2887 s + 0.186835
7
6
s + 1.36426 s + 2.9795 s 5 + 2.7545 s 4 + 2.70025 s 3 + 1.56215 s 2 + 0.7275 s + 0.1868
The numerator and denominator coefficients of can be obtained by typing num and den in
the Command Window.
M4.7 The MATLAB program used is given below:
[N,Wn] = cheb1ord(0.3157894, 1, 0.5, 30,'s');
[B,A] = cheby1(N,0.5, Wn,'s');
[num,den] = lp2bs(B,A,2*pi*sqrt(700)*10^6, 2*pi*15e6);
figure(1)
omega = [0:0.01:10];
h = freqs(B,A,omega);
gain = 20*log10(abs(h));
plot(omega, gain); grid; axis([0 4 -70 5]);
xlabel('\Omega'); ylabel('Gain, dB');
title('Analog Lowpass Filter');
figure(2)
omega = [0:10000:160e6*pi];
h = freqs(num,den,omega);
gain = 20*log10(abs(h));
plot(omega/(2*pi), gain); grid; axis([0 80e6 -70 5]);
xlabel('Frequency in Hz'); ylabel('Gain, dB');
title('Analog Bandstop Filter');
H LP (s ) =
0.02253823
s 3 + 0.3956566 s 2 + 0.1530643 s + 0.02253823
Not for sale
.
107
.
Analog Lowpass Filter
Passband Details
0.5
-20
Gain, dB
Gain, dB
0
-40
0
-0.5
-60
0
1
2
3
-1
4
0
0.1
0.2
Ω
0.3
0.4
0.5
Ω
Stopband Details
Analog Bandstop Filter
0.5
-20
Gain, dB
Gain, dB
0
-40
0
-0.5
-60
-1
0
2
4
Frequency in Hz
6
8
7
x 10
0
2
4
Frequency in Hz
6
8
7
x 10
M4.8 The MATLAB program to generate the plots of Figure 4.56 is given below:
% Droop Compensation
w = 0:pi/100:pi;
h1 = freqz([-1/16 9/8 -1/16],1,w);
h2 = freqz(9, [8 1], w);
w1 = 0;
for n = 1:101;
h3(n) = sin(w1/2)/(w1/2);
w1 = w1 + pi/100;
end
m1 = 20*log10(abs(h1));
m2 = 20*log10(abs(h2));
m3 = 20*log10(abs(h3));
plot(w/pi,m3,’-’,w/pi,m1+m2,’--’,w/pi,m2+m3,’-.’);grid
xlabel(‘Normalized frequency’);ylabel(Gain, dB’);
Not for sale
108
Chapter 5
5.1
N −1
N −1
~
~
~
Let ~
y[ n] = ∑ ~
x[r ]h [ n − r ]. Then ~
y[ n + kN ] = ∑ ~
x[r ]h [ n + kN − r ]. Since h [ n] is
r =0
r =0
~
~
periodic in n with a period N , h [ n + kN − r ] = h [ n − r ]. Therefore ~
y[ n + kN ]
N −1
~
= ∑ ~
x[r ]h [ n − r ] = ~
y[ n], hence ~
y[ n] is also periodic in n with a period N .
r =0
5.2
4
~
~
~
~
~
~
(a) ~
y[ 0] = ∑ ~
x[r ]h [ −r ] = ~
x[0]h [0] + ~
x[1]h [ 4] + ~
x[2]h [3] + ~
x[3]h [2] + ~
x[ 4]h [1] = −13,
r =0
4
~
~
~
~
~
~
~
y[1] = ∑ ~
x[r ]h [1 − r ] = ~
x[0]h [1] + ~
x[1]h [0] + ~
x[2]h [ 4] + ~
x[3]h [3] + ~
x[ 4]h [2] = −13,
r =0
4
~
~
~
~
~
~
~
y[ 2] = ∑ ~
x[r ]h [2 − r ] = ~
x[0]h [2] + ~
x[1]h [1] + ~
x[2]h [0] + ~
x[3]h [ 4] + ~
x[ 4]h [3] = −13,
r =0
4
~
~
~
~
~
~
~
y[3] = ∑ ~
x[r ]h [3 − r ] = ~
x[0]h [3] + ~
x[1]h [2] + ~
x[2]h [1] + ~
x[3]h [0] + ~
x[ 4]h [ 4] = −13,
r =0
4
~
~
~
~
~
~
~
y[ 4] = ∑ ~
x[r ]h [ 4 − r ] = ~
x[0]h [ 4] + ~
x[1]h [3] + ~
x[2]h [2] + ~
x[3]h [1] + ~
x[ 4]h [0] = −13.
r =0
y[ n] = {− 13, − 13, − 13, − 13, − 13,}, 0 ≤ n ≤ 4.
Therefore, ~
y[ n] = {1, 1, 1, 1, 1,}, 0 ≤ n ≤ 4.
(b) ~
5.3
~ [ n + rN ] = ψ
~ [ n], hence all the terms which are not in the range 0,1,K, N − 1,
Since ψ
k
k
~ [ n], where 0 ≤ k ≤ N − 1. Hence, in this case the Fourier
can be accumulated to ψ
k
series representation involves only N complex exponential sequences. Let
1 N −1 ~
j 2 πkn / N
~
x [ n] =
, then
∑ X[ k ] e
N k =0
N −1
1 N −1 ~ ⎛ N −1 j 2 π( k − r )n / N ⎞
1 N − 1 N −1 ~
j 2 π( k − r )n / N
⎟⎟.
=
x[ n] e − j 2 πrn / N =
∑ ~
∑ ∑ X[ k ] e
∑ X[ k ] ⎜⎜ ∑ e
N n=0 k =0
N k =0
n =0
⎝ n=0
⎠
Now, from Eq. (5.11), the inner summation is equal to N if k = r , otherwise it is equal
N −1
~
~
x[ n] e − j 2 πrn / N = X [r ]. Next, we observe X[ k + lN ]
to 0. Thus, ∑ ~
n=0
N −1
N −1
N −1
~
= ∑ ~
x[ n] e − j 2 π( k + lN )n / N = ∑ ~
x[ n] e − j 2 πkn / N e − j 2 πln = ∑ ~
x[ n] e − j 2 πkn / N = X[ k ].
n=0
n=0
Not for sale.
n=0
109
5.4
{
}
1
πn
~
x1[n] is N = 8.
x1[ n] = cos⎛⎜ ⎞⎟ = e jπn / 4 + e − jπn / 4 . The period of ~
⎝ 4⎠ 2
7
⎫
1⎧ 7
~
X1[ k ] = ⎨ ∑ e j 2 πn / 8 e − j 2 πkn / 8 + ∑ e − j 2 πn / 8 e − j 2 πkn / 8 ⎬
2 ⎩n = 0
n =0
⎭
(a)
=
7
⎫
1 ⎧ 7 − j 2 πn( k −1) / 8
+
e
e − j 2 πn( k +1) / 8 ⎬. Now, from Eqn. (5.11) we observe
∑
∑
⎨
2 ⎩n = 0
n =0
⎭
7
∑e
− j 2 πn( k −1) / 8
n=0
7
8, for k = 1,
8, for k = 7,
and ∑ e − j 2 πn( k +1) / 8 = ⎧⎨
= ⎧⎨
0
,
otherwise
,
⎩0, otherwise.
⎩
n=0
~
4, for k = 1,7,
Hence, X1[ k ] = ⎧⎨
0
⎩ , otherwise.
1
3
πn
πn
(b) ~
x 2 [ n] = sin⎛⎜ ⎞⎟ + 3 cos⎛⎜ ⎞⎟ = {e jπn / 3 − e − jπn / 3} + {e jπn / 4 + e − jπn / 4 }. The
2
2
j
⎝ 3⎠
⎝ 4⎠
πn
πn
x [ n] is the
is 6 and the period of cos
is 8. Hence, the period of ~
period of sin
( )
( )
3
4
2
GCM of (6,8) and is 24.
1 ⎧ 23 j8πn / 24 − j 2 πkn / 24 23 − j8πn / 24 − j 2 πkn / 24 ⎫
~
− ∑e
X 2 [k ] =
e
e
⎨ ∑e
⎬
2 j ⎩n = 0
n =0
⎭
23
⎫
3 ⎧ 23
+ ⎨ ∑ e j 6 πn / 24 e − j 2 πkn / 24 − ∑ e − j 6 πn / 24 e − j 2 πkn / 24 ⎬
2 ⎩n = 0
n=0
⎭
=
1 ⎧ 23 − j 2 πn( k − 3) / 24 23 − j 2 πn( k + 3) / 24 ⎫
− ∑e
⎨ ∑e
⎬
2 j ⎩n = 0
n=0
⎭
k = 3,
⎧− j12,
⎪ j12,
3 ⎧ 23 − j 2 πn( k − 4) / 24 23 − j 2 πn( k + 4) / 24 ⎫
~
k = 21,
+ ⎨ ∑e
− ∑e
⎬. Hence X 2 [ k ] = ⎨ 36,
= 4, 20,
k
2 ⎩n = 0
n =0
⎭
⎪
0
,
otherwise.
⎩
5.5
~
Let P[ k ] denote the coefficients of the Fourier series representation of ~
p[ n]. Since
~
p[ n] is periodic with a period N , then from Eq. (5.185b), we have
N −1
~
P[ k ] = ∑ ~
p[ n] e − j 2 πkn / N = 1. Hence, from Eq. (5.185a) we get
~
p[ n] =
5.6
n=0
1 N −1 ~
j 2 πln / N
=
∑ P[l] e
N l =0
~
X [ k ] = X ( e jω )
1 N −1 j 2 πln / N
.
∑ e
N l=0
∞
ω = 2 πk / N
= X (e j 2 πk / N ) = ∑ x[ n] e − j 2 πk / N , − ∞ < k < ∞.
n = −∞
~
~
Now, X[ k + lN ] = X (e j 2 π( k + lN ) / N ) = X (e j 2 πk / N e jπl ) = X (e j 2 πk / N ) = X[ k ].
Not for sale.
110
1 N −1 ~
1 N −1⎛ ∞
j 2 πkn / N
− j 2 πln / N ⎞⎟ j 2 πkn / N
x [ n] =
=
Likewise, ~
∑ ⎜⎜ ∑ x[l] e
∑ X[ k ] e
⎟e
N k =0
N k = 0 ⎝ l = −∞
⎠
1 N −1 ∞
j 2 π( k − l )n / N
=
. Let l = n + rN. Then
∑ ∑ x[l] e
N k =0 l = −∞
N −1
⎛ N −1 − j 2 πkr ⎞
1 ∞
~
⎟⎟. But ∑ e − j 2 πkr = N . Hence,
x [ n] =
∑ x[ n + rN ]⎜⎜ ∑ e
N r = −∞
k =0
⎠
⎝ k =0
∞
~
x[ n] = ∑ x[ n + rN ].
r = −∞
5.7
N −1
N −1
~
(a) G[ k ] = ∑ g~[ n] e − j 2 πkn / N = ∑ ~
x [ n ]~
y[ n] e − j 2 πkn / N . Now,
n=0
N −1 ~
n=0
1
− j 2 πrn / N
~
x [ n] =
. Therefore,
∑ X [r ] e
N r =0
1 N −1 N −1 ~ t
1 N −1 ~ N −1t
~
− j 2 π( k − r )n / N
− j 2 π( k − r ) n / N
=
G[ k ] =
∑ ∑ X[r ] y[ n] e
∑ X[r ] ∑ y[ n] e
N n=0 r =0
N r =0
n=0
1 N −1 ~ ~
=
∑ X[r ]Y [ k − r ].
N r =0
~
1 N −1 ~ ~
1 N −1 N −1 ~ ~
j 2 πkn / N
j 2 πk ( n − r ) / N
=
(b) h [ n] =
∑ X[ k ]Y [ k ] e
∑ ∑ x[r ]Y [ k ] e
N k =0
N k =0 r =0
N −1
N −1
⎛ 1 N −1 ~
j 2 πk ( n − r ) / N ⎞⎟
x[r ] ⎜⎜
x [r ] ~
y[ n − r ] .
=
= ∑ ~
∑~
∑ Y [k] e
⎟
N
r =0
k
r
=
0
=
0
⎠
⎝
5.8
(a) x a [ n] = sin(2πn / N ) = (e j 2 πn / N − e − j 2 πn / N ). Therefore,
2j
1
X a [k ] =
1 N −1 j 2 πn / N − j 2 πkn / N 1 N −1 − j 2 πn / N − j 2 πkn / N
−
e
e
∑ e
∑ e
2 j n=0
2 j n=0
1 N −1 − j 2 π( k −1)n / N 1 N −1 − j 2 π( k +1)n / N
−
. From Eq. (5.11), the first sum is
∑ e
∑ e
2 j n=0
2 j n=0
equal to N when k = 1 and 0 othereise. Likewise, from Eq. (5.11), the second sum is
equal to N when k = N − 1 and 0 otherwise. Therefore,
k = 1,
⎧ N / 2 j,
⎪
X a [ k ] = ⎨− N / 2 j, k = N − 1,
⎪⎩ 0,
otherwise.
=
N
2 πn ⎞ 1 1
4 πn ⎞
1
for
(b) x b [ n] = cos 2 ⎛⎜
⎟ = + cos⎛⎜
⎟. Now the N –point DFT of is
2
2
⎝ N ⎠ 2 2
⎝ N ⎠
( ) is
k = 0 and 0 otherwise. From Example 5.2, the N –point DFT of cos
k = 2 and k = N − 2 and 0 otherwise. Therefore,
Not for sale.
4 πn
N
N
2
for
111
k = 0,
⎧⎪ N / 2,
X b [ k ] = ⎨ N / 4, k = 2, N − 2,
⎪⎩ 0,
otherwise.
2 πn ⎞ 1
6 πn ⎞
(c) x c [ n] = cos 3 ⎛⎜
⎟ = cos⎛⎜
⎟+
⎝ N ⎠ 4
⎝ N ⎠
N
6 πn ⎞
DFT of cos⎛⎜
for k = 3 and
⎟ is
2
⎝ N ⎠
3
2 πn ⎞
cos⎛⎜
⎟.
4
⎝ N ⎠
From Example 5.2, the N –point
k = N − 3 and 0 otherwise. Likewise, from
N
2 πn ⎞
Example 5.2, the N –point DFT of cos⎛⎜
for k = 1 and k = N − 1 and 0
⎟ is
2
⎝ N ⎠
⎧ N / 8, k = 3, N − 3,
⎪
otherwise. Therefore, X c [ k ] = ⎨3N / 8, k = 1, N − 1,
⎪⎩ 0,
otherwise.
5.9
N −1
N −1
1 − αWNkN
n=0
n=0
1 − αWNk
(a) Ya [ k ] = ∑ α nWNkn = ∑ (αWNk ) n =
=
1− α
1 − αWNk
.
(b) Yb [ k ] = 2 ∑ WNkn − 3 ∑ WNkn . Assume first N is even, i.e., N = 2L. Then
k even
k odd
(
)
⎛ 1 − W kL
L −1
L −1
L −1
L −1
L
Yb [ k ] = 2 ∑ W2kL2r − 3 ∑ W2kL(2r +1) = 2 ∑ WLkr − 3W2kL ∑ WLkr = 2 − 3WNk ⎜
k
⎜
r =0
r =0
r =0
r =0
⎝ 1 − WL
L
L −1
r =0
r =0
⎞
⎟ = 0.
⎟
⎠
Next, assume N is odd, i.e., N = 2 L + 1. Then Yb [ k ] = 2 ∑ W2kL2r − 3 ∑ W2kL(2r +1)
=
L
2 ∑ WLkr
r =0
− 3W2kL
L −1
∑
r =0
kL
⎛ 1 − W k ( L +1) ⎞
⎛
k ⎜ 1 − WL
L
⎜
⎟
=2
− 3W2 L
⎜ 1−W k ⎟
⎜ 1−W k
L
L
⎝
⎝
⎠
WLkr
k
⎛
⎞
⎟ = 2⎜ 1 − W L
⎜1− W k
⎟
L
⎝
⎠
⎞
⎟ = 2.
⎟
⎠
5.10 x[ n] = cos(ωo n) = (e jω o n + e − jω o n ), 0 ≤ n ≤ N − 1. Therefore,
1
2
X[ k ] =
1 N −1 jω o n − j 2 πkn / N 1 N −1
+ ∑ e − j jω o n e − j 2 πkn / N
e
∑ e
2 n=0
2 n=0
1 N −1 − j (
= ∑ e
2 n=0
=
2 πk
− ω o )n
N
2 πk
− j ⎛⎜
−ωo ⎞⎟ N
N
⎝
⎠
1 1− e
2
⋅
2 πk
− j ⎛⎜
−ωo ⎞⎟
N
⎝
⎠
1− e
1 N −1 − j (
+ ∑ e
2 n=0
+
2 πk
+ ω o )n
N
2 πk
− j ⎛⎜
+ωo ⎞⎟ N
N
⎝
⎠
1 1− e
2
⋅
2 πk
− j ⎛⎜
+ωo ⎞⎟
N
⎝
⎠
1− e
Not for sale.
112
⎛ 2 πk −ω ⎞⎛ N −1 ⎞
⎟
o ⎟⎜
N
⎠⎝ 2 ⎠
1 − j⎜
= e ⎝
2
(
⋅
sin (
N −1
5.11 X [ k ] = ∑ x[ n]WNnk =
n=0
( N / 2 ) −1
)+ 1 e
) 2
ωo N
2
πk
ωo
−
2
N
sin πk −
( N / 2 ) −1
∑
2 πk
N −1 ⎞
+ ωo ⎞⎟⎛⎜
− j ⎛⎜
⎟
⎝ N
⎠⎝ 2 ⎠
sin
x[2r ]WN2rk +
( N / 2 ) −1
∑
r =0
r =0
( N / 2 ) −1
= ∑ x[2r ]WNrk/ 2 + WNk ∑ x[2r + 1]WNrk/ 2
r =0
r =0
( N / 2 ) −1
( N / 2) −1
= ∑ x0 [r ]WNrk/ 2 + WNk ∑ x1[r ]WNrk/ 2
r =0
r =0
k
= X 0 [⟨ k ⟩ N / 2 ] + WN X1[ ⟨ k ⟩ N / 2 ], 0 ≤ k ≤ N − 1.
N −1
5.12 X [ k ] = ∑ x[ n]WNnk =
=
n=0
( N / 2 ) −1
( N / 2 ) −1
∑
n=0
x[ n]WNnk + WN( N / 2 )k
∑
x[ n]WNnk +
( N / 2 ) −1
n=0
( N / 2 ) −1 ⎛
∑
n=0
x[
N
2
⋅
(
ωo N
2
πk ωo
+
N
2
sin πk +
(
)
).
x[2r + 1]WN(2r +1)k
N −1
nk
∑ x[ n]WN
n= N / 2
+ n]WNnk
⎞ nk
k N
⎜ x[ n] + (−1) x[ + n] ⎟WN . For k = 2l, we get
2
⎠
n=0 ⎝
( N / 2 ) −1 ⎛
( N / 2 ) −1 ⎛
N
N
⎞
⎞
X [2l] = ∑ ⎜ x[ n] + x[ + n] ⎟WN2 nl = ∑ ⎜ x[ n] + x[ + n] ⎟WNnl/ 2 = X 0 [l]
2
2
⎠
⎠
n=0 ⎝
n=0 ⎝
( N / 2 ) −1 ⎛
N
⎞
and for k = 2l + 1 we get X [2l + 1] = ∑ ⎜ x[ n] − x[ + n] ⎟WN(2 l +1)n
2
⎠
n=0 ⎝
=
=
∑
( N / 2 ) −1 ⎛
N
N
⎞ n
nl
⎜ x[ n] + x[ + n] ⎟WN ⋅ WN / 2 = X1[l] where 0 ≤ l ≤ − 1.
2
2
⎠
n=0 ⎝
∑
1
2
1
2
5.13 g[ n] = ( x[2n] + x[2 n + 1]), h[ n] = ( x[2n] − x[2n + 1]), 0 ≤ n ≤
N
− 1.
2
Solving for
x[2n] and x[2n + 1], we get x[2 n] = g[ n] + h[ n] and x[2 n + 1] = g[ n] − h[ n]. Therefore,
N −1
X [ k ] = ∑ x[ n]WNnk =
n=0
( N / 2 ) −1
( N / 2 ) −1
∑
x[2r ]WN2rk +
( N / 2 ) −1
∑
x[2r + 1]WN(2r +1)k
r =0
r =0
( N / 2 ) −1
= ∑ x[2r ]WNrk/ 2 + WNk ∑ x[2r + 1]WNrk/ 2
r =0
r =0
( N / 2 ) −1
( N / 2 ) −1
= ∑ ( g[ n] + h[ n]) WNrk/ 2 + WNk ∑ ( g[ n] − h[ n]) WNrk/ 2
r =0
r =0
( N / 2 ) −1
( N / 2 ) −1
= (1 + WNk ) ∑ g[ n]WNrk/ 2 + (1 − WNk ) ∑ h[ n]WNrk/ 2
r =0
r =0
Not for sale.
113
= (1 + WNk )G[ ⟨ k ⟩ N / 2 ] + (1 − WNk )H [ ⟨ k ⟩ N / 2 ], 0 ≤ k ≤ N − 1.
5.14 g[ n] = a1 x[2n] + a 2 x[2n + 1], h[ n] = a3 x[2 n] − a 4 x[2 n + 1], 0 ≤ n ≤
N
− 1,
2
with
a g[ n] − a 2 h[ n]
a1a 4 ≠ a 2 a3 . Solving for x[2n] and x[2n + 1], we get x[2n] = 4
and
a1a 4 − a 2 a3
− a3 g[ n] + a1h[ n]
x[2n + 1] =
. Therefore,
a1a 4 − a 2 a3
N −1
X [ k ] = ∑ x[ n]WNnk =
=
n=0
( N / 2 ) −1
∑
( N / 2 ) −1
∑
x[2r ]WN2rk +
r =0
( N / 2 ) −1
x[2r ]WNrk/ 2 + WNk ∑ x[2r
r =0
r =0
( N / 2 ) −1 ⎛ a
( N / 2 ) −1
∑
r =0
x[2r + 1]WN(2r +1)k
+ 1]WNrk/ 2
( N / 2 ) −1 ⎛ − a g[ n] + a h[ n] ⎞
g[r ] − a 2 h[r ] ⎞ rk
1
⎜⎜ 4
⎟⎟ WN / 2 + WNk ∑ ⎜⎜ 3
⎟⎟ WNrk/ 2
r = 0 ⎝ a1a 4 − a 2 a3 ⎠
r = 0 ⎝ a1a 4 − a 2 a3 ⎠
1
=
(a 4 − a3WNk )G[⟨ k ⟩ N / 2 ] + (− a 2 + a1WNk )H[⟨ k ⟩ N / 2 ] , 0 ≤ n ≤ N − 1.
a1a 4 − a 2 a3
=
∑
(
)
N −1
N −1
n=0
n=0
2 ln
5.15 (a) G[ k ] = ∑ x[ n]W2nk
N . For k even, i.e., k = 2l, G[ 2l] = ∑ x[ n]W2 N
N −1
= ∑ x[ n]2lnN = X[l], 0 ≤ l ≤ N − 1.
n=0
2 N −1
(b) H[ k ] = ∑ x[ n − N ]W2nk
N . Let m = n − N or n = m + N . Then
n=N
N −1
N −1
m + N )k
= (−1) k ∑ x[ m]W2mk
H[ k ] = ∑ x[ m]W2(N
N . For k even, i.e., k = 2l,
m=0
N −1
N −1
m=0
n=0
n=0
2 N −1
2 N −1
n=0
n=0
H[2l] = ∑ x[ n]W22Nln = ∑ x[ n]WNln = X[l], 0 ≤ l ≤ N − 1.
nk
5.16 Y [ k ] = ∑ y[ n]W2nk
N = ∑ ( g[ n] + h[ n]) W2 N = G[ k ] + H[ k ]. For k even, i.e.,
k = 2l, Y [ 2l] = G[ 2l] + H [ 2l] = 2 X [ l], 0 ≤ l ≤ N − 1.
N −1
N −1
n=0
N −1
n=0
N −1
n=0
n=0
2l +1)n
= ∑ x[ n]W2nN WNln and
For k odd, i.e., k = 2l + 1, G[2l + 1] = ∑ x[ n]W2(N
2l +1)n
H[2l + 1] = − ∑ x[ n]W2(N
= − ∑ x[ n]W2nN WNln = −G[2l + 1], 0 ≤ l ≤ N − 1.
Hence, for k = 2l + 1, Y [ 2l + 1] = G[ 2l + 1] − G[ 2l + 1] = 0, 0 ≤ l ≤ N − 1.
Not for sale.
114
5.17 Y [ k ] =
MN −1
N −1
nk
nk
∑ y[ n]WMN = ∑ x[ n]WMN . Thus,
n=0
N −1
n=0
N −1
n=0
n=0
nkM
Y [ kM ] = ∑ x[ n]WMN
= ∑ x[ n]WNnk = X[ k ].
5.18
N −1
N −1
5.19 (a) Now, X[ N / 2] = ∑ x[ n]WNnN / 2 = ∑ (−1) n x[ n]. Hence if x[ n] = x[ N − 1 − n]
n=0
n=0
N −1
and N is even, then X[ N / 2] = ∑ (−1) n x[ n] = 0.
n=0
N −1
(b) X[0] = ∑ x[ n]. Hence if x[ n] = − x[ N − 1 − n], then X [0] = 0.
n=0
N −1
( N / 2 ) −1
n =0
n=0
(c) X[2l] = ∑ x[ n]WN2 nl =
=
( N / 2 ) −1
∑
n=0
x[ n]WN2 nl +
∑
( N / 2 ) −1
∑
n=0
x[ n +
x[ n]WN2 nl +
N −1
2 nl
∑ x[ n]WN
n = ( N / 2 ) −1
M −1
nl
= ∑ (x[ n] + x[ n + M ])W22M
. Hence if
N
]WN2 nl
2
n=0
x[ n] = − x[ n + M ], then X [2l] = 0 for 0 ≤ l ≤ M − 1.
N −1
5.20 X [2m] = ∑ x[n]W N2mn =
=
n=0
( N / 2 ) −1
∑
n=0
0≤m≤
( N / 2 ) −1
∑
n=0
N / 2 −1
x[n]W N2mn +
N −1
2 mn
∑ x[n]W N
n= N / 2
( N / 2 ) −1
N
x[n]W N2 mn + ∑ x[n + ]W N2mnW NmN = ∑ ⎛⎜ x[n] +
2
n=0 ⎝
n=0
N
N
− 1. This implies x[n] + x[ n + ] = 0.
2
2
x[n +
N
2
2 mn
⎟⎞ W N = 0,
⎠
5.21 (a) Using the circular convolution property of the DFT given in Table 5.3, we get
km1
DFT{x[⟨ n − m1 ⟩ N } = W N
km2
X [k ] and DFT{x[⟨ n − m2 ⟩ N } = W N
km1
Hence, W [k ] = DFT {w[n]} = W N
(b) g[n] =
1
2
km2
X [k ] + W N
km1
X [k ] = (W N
(x[n] + (−1) n x[n]) = 12 (x[n] + WN− ( N / 2)n x[n]).
X [k ].
km1
+ WN
) X [k ].
Using the circular
convolution property of the DFT given in Table 5.3, we get
G[k ] = DFT{g[n]} =
1
2
{X [k ] + X [⟨k −
N
⟩
2 N
}.
(c) Using the circular convolution property of the DFT given in Table 5.3, we get
Y [k ] = DFT { y[n]} = X [k ] ⋅ X [k ] = X 2 [k ].
Not for sale.
115
{
}= W X [k ] = (−1) X [k ]. Hence,
⎧2 X [k ],
U [k ] = DFT{u[n]} = DFT{x[n] − x[⟨ n − ⟩ }= X [k ] − (−1) X [k ] = ⎨
⎩ 0,
5.22 (a) DFT x[⟨ n −
N
⟩
2 N
k ( N / 2)
N
k
N
2 N
k
for k odd,
for k even.
N ⎫
⎧
(b) V [k ] = DFT{v[n]} = DFT ⎨ x[n] − x[n − ]⎬ = X [k ] + X [k ] = 2 X [k ].
2 ⎭
⎩
( N / 2) n
x[n]. Hence, using the circular frequency-shifting
(c) y[n] = (−1) n x[n] = W N
property of the DFT given in Table 5.3, we get
{
}
Y [k ] = DFT{ y[n]} = DFT W N( N / 2) n x[n] = X [⟨ k −
N
⟩ ].
2 N
5.23 (a) From the circular frequency-shifting property of the DFT given in Table 5.3, we get
− m1 n
IDFT{ X [⟨ k − m1 ⟩ N } = W N
−m 2 n
x[n] and IDFT{ X [⟨ k − m2 ⟩ N } = W N
x[n]. Hence,
w[n] = IDFT{W [k ]} = IDFT{αX [⟨ k − m1 ⟩ N } + βX [⟨ k − m2 ⟩ N }
− m1n
= αW N
− m2 n
x[n] + βW N
− m1n
x[n] = (αW N
(b) G[k ] = ( X [k ] + (−1) k X [k ]) =
1
2
1
2
− m2 n
+ βW N
(X [k ] + W
) x[n].
)
− ( N / 2) k
X [k ] .
N
Using the circular
time-shifting property of the DFT given in Table 5.3, we get
N
1
g[n] = IDFT{G[k ]} = ⎛⎜ x[n] + x[⟨ n − ⟩ N ⎞⎟.
2⎝
2
⎠
(c) Using the modulation property of the DFT given in Table 5.3, we get
y[n] = IDFT{Y [k ]} = N ⋅ x[n] ⋅ x[n] = N ⋅ x 2 [n].
N −1
( N / 2 ) −1
n=0
n=0
5.24 (a) X [2m] = ∑ x[n]W N2mn =
=
=
=
( N / 2 ) −1
∑
x[n]W N2mn
∑
x[n]W N2 mn +
n=0
( N / 2 ) −1
n=0
( N / 2 ) −1
+
∑
x[n]W N2mn +
∑
x[n +
∑
x[n +
N
]W N2mnW Nmn
2
n=0
N / 2 −1
n=0
2 mn
∑ x[n]W N
n= N / 2
N
2m( n + )
N
2
]W N
2
N / 2 −1
N −1
( N / 2 ) −1
N
2 mn
⎛⎜ x[n] + x[n + N ]⎟⎞ W 2mn =
∑ (x[n] − x[n])W N = 0, 0 ≤ m ≤ − 1.
N
2 ⎠
2
n=0
n=0 ⎝
∑
N −1
(b) X [4l] = ∑ x[n]W N4ln
n=0
=
( N / 4 ) −1
∑
n=0
x[n]W N4ln +
( N / 2 ) −1
∑
n= N / 4
x[n]W N4ln +
( 3 N / 4 ) −1
∑
n= N / 2
Not for sale.
x[n]W N4ln +
N −1
4 ln
∑ x[n]W N
n = 3N / 4
116
N
−1
4 ⎛
⎜
4l ( n + )
4l ( n + )
4l ( n + ) ⎞⎟
N
N
3N
4 ln
4
2
4
= ∑ ⎜ x[n]W N + x[n + ]W N
+ x[n + ]W N
+ x[n + ]W N
⎟⎟
4
2
4
⎜
n=0
N
N
3N
⎝
⎠
N
−1
4
3N
N
N
= ∑ ⎛⎜ x[n] + x[n + ]W Nln + x[n + ]W N2ln + x[n + ]W N3ln ⎞⎟ W N4ln
4
2
4
⎠
n=0⎝
N
−1
4
= ∑ ( x[n] − X [n] + x[n] − x[n]) W N4ln = 0 as W NlN = W N2lN = W N3lN = 1.
n=0
N −1
N −1
n=0
N −1
n=0
5.25 (a) X [ N − k ] = ∑ x[n]W N( N − k ) n = ∑ x[n]W N− kn + X * [k ].
N −1
(b) X [0] = ∑ x[n]W N0 ∑ x[n] which is real.
n=0
N −1
N
2
n=0
N −1
(c) X [ ] = ∑ x[n]W N( N / 2) n = ∑ (−1) n x[n] which is real.
n=0
n=0
N −1
5.26 X [k ] = ∑ x[n]W Nnk .
n=0
N −1
(a) X * [k ] = ∑ x * [n]W N− nk . Replacing n by N − n in the summation we obtain
n=0
N −1
N −1
n=0
n=0
X * [k ] = ∑ x * [ N − n]W N− ( N − n) k = ∑ x * [ N − n]W Nnk . Thus,
DFT{x * [ N − n]} = DFT{x * [⟨− n⟩ N } = X * [k ].
1
2
(b) Re{x[n]} = {x[n] + x * [n]}. Taking the DFT of both sides and using the results
of Part (a) we get DFT{Re{x[n]}} =
1
{X [k ] +
2
X * [⟨− k ⟩ N }.
(c) j Im{x[n]} = {x[n] − x * [n]}. Thus, DFT{ j Im{x[n]}} =
1
2
1
{X [k ] −
2
X * [⟨− k ⟩ N }.
1
(d) x cs [n] = {x[n] + x * [⟨− n⟩ N ]}. Using the linearity property and results of Part (b)
2
1
we get DFT{xcs [n]} = { X [k ] + X * [k ]} = Re{ X [k ]}.
2
1
(e) x ca [n] = {x[n] − x * [⟨− n⟩ N ]}. Using the linearity property and results of Part (b)
2
1
2
we get DFT{xca [n]} = { X [k ] − X * [k ]} = j Im{X [k ]}.
Not for sale.
117
5.27 Since for a real sequence, x[ n] = x * [ n], taking the DFT of both sides we get
X [k ] = X * [⟨− k ⟩ N ]. This implies
Re{ X [k ]} + j Im{X [k ]} = Re{ X [⟨− k ⟩ N ]} − j Im{X [⟨− k ⟩ N ]}.
Comparing real and imaginary parts we get Re{ X [k ]} = Re{ X [⟨− k ⟩ N ]} and
Im{X [k ]} = − Im{X [⟨− k ⟩ N ]}.
Also, X [k ] = (Re{ X [k ]}) 2 + (Im{X [k ]}) 2
= (Re{ X [⟨− k ⟩ N ]}) 2 + (Im{X [⟨− k ⟩ N ]}) 2 = X [⟨− k ⟩ N ] and
⎛ − Im{X [⟨− k ⟩ N ]} ⎞
⎛ Im{X [k ]} ⎞
⎟⎟ = − arg{X [⟨− k ⟩ N ]}.
⎟⎟ = tan −1 ⎜⎜
arg{X [k ]} = tan −1 ⎜⎜
⟨−
⟩
Re{
X
[
k
]}
Re{
X
[
k
]}
⎝
⎠
N
⎝
⎠
5.28 (a) x1[⟨− n⟩ 9 ] = {4 3 − 5 1 − 2 − 2 1 − 5 3} = x1[n]. Thus, x1[n] is a
circular even sequence and hence, it has a real-valued 9 -point DFT.
(b) x2 [⟨− n⟩ 9 ] = {0 − 5 − 1 − 4 3 − 3 4 1 5} = − x2 [n]. Thus, x2 [n] is a
circular odd sequence and hence, it has an imaginaryl-valued 9 -point DFT.
(c) x3 [⟨−n⟩ 9 ] = {0 − 5 − 1 − 4 3 − 3 4 2 − 5} which is neither equal to
x 3 [n] nor equal to − x 3 [n]. Thus, x3 [ n] has a complex-valued 9 -point DFT.
(d) x4 [⟨− n⟩ 9 ] = {− 5 5 − 2 2 4 4 2 − 2 5} = x 4 [n]. Thus, x4 [n] is a
circular even sequence and hence, it has a real-valued 9 -point DFT.
5.29 (a) h[n] = g[⟨ n − 5⟩ 8 ]. Hence, H [k ] = W8−5k G[k ] = e j10πk / 8G[k ] = e j 5πk / 4 G[k ]
= {2.6 + j 4.1, e j 5π / 4 (3 − j 2.7), e j 5π / 2 (−4.2 + j1.4), e j15π / 4 (3.5 − j 2.6),
e j 5π (0.5), e j 25π / 4 (1.3 + j 4.4), e j15π / 2 (2.4 − j1.6), e j 35π / 4 (−3 + j1.6)}.
(b) H [k ] = G[⟨ k + 3⟩ 8 ]. Hence, h[n] = W83 g[n] = e − j 6πn / 8 g[n] = e − j 3πn / 4 g[n]
= {−0.1 − j 0.7, e − j 3π / 4 (1.3 + j ), e − j 3π / 2 (2 + j 0.7), e − j 9π / 4 (1.1 + j 2.2),
e − j 3π (−0.8 + j 0.2), e − j15π / 4 (3.4 − j 0.1), e − j 9π / 2 (−1.2 + j 3.1), e − j 21π / 4 ( j1.5)}.
5.30 (a) y[ n] = αg[ n] + βh[ n]. Therefore,
N −1
N −1
N −1
n=0
n=0
n=0
Y [k ] = ∑ y[n]W Nnk = α ∑ g[n]W Nnk + β ∑ h[n]W Nnk = αG[k ] + βH [k ].
N −1
(b) x[n] = g[⟨ n − no ⟩ N ]. Therefore, X [k ] = ∑ g[⟨ n − no ⟩ N ]W Nnk
n=0
Not for sale.
118
n o −1
N −1
n=0
n = no
= ∑ g[ N + n − no ]W Nnk + ∑ g[n − no ]W Nnk
=
N −1
(n + no − N ) k
∑ g[n]W N
n = N − no
−ko n
(c) u[n] = W N
+
N − n −1
(n + no )k
∑ g[no ]W N
n=0
n k N −1
= WN o
n k
nk
∑ g[n]W N = W N o G[k ].
n=0
N −1
N −1
n=0
n=0
(k − k o )n
g[n]. Therefore, U [k ] = ∑ u[n]W Nkn = ∑ g[n]W N
⎧ N −1
(k − k o )n
,
if k ≥ k o ,
⎪⎪ ∑ g[n]W N
=
0
n
= ⎨ N −1
⎪ ∑ g[n]W ( N + k − k o ) n , if k < k o .
N
⎪⎩ n = 0
if k ≥ k o ,
⎧ G[k − k o ],
= G[⟨ k − k o ⟩ N ].
Thus, U [k ] = ⎨
⎩G[ N + k − k o ], if k < k o ,
N −1
N −1
(d) h[ n] = G[ n]. Therefore, H [k ] = ∑ h[n]W Nnk = ∑ G[n]W Nnk
N −1 N −1
N −1
n=0
N −1 ( k + r ) n
n=0 r =0
r =0
n=0
= ∑ ∑ g[r ]W Nnr W Nkr = ∑ g[r ] ∑ W N
n=0
. The second sum is nonzero only if
k = r = 0 or else if r = N − k and k ≠ 0. Hence,
if k = 0,
⎧ Ng[0],
H [k ] = ⎨
= Ng[⟨− k ⟩ N ].
⎩ Ng[ N − k ], if k > 0,
N −1
N −1 N − 1
n=0 m=0
N −1
m=0
N −1
N −1
m =0
n=0
m =0
(e) u[ n] = ∑ g[ m] h[⟨− n − m⟩ N ]. Therefore, U[ k ] = ∑ ∑ g[ m] h[⟨− n − m⟩ N ]WNnk
= ∑ g[ m] ∑ h[⟨− n − m⟩ N ]WNnk = ∑ g[ m] H[ k ]WNmk = H[ k ] G[ k ].
N −1
5.31
∑ g[ n] h * [ n] =
n=0
=
N −1
1 N −1 N − 1
1 N −1
− nk
− nk
∑ ∑ G[ k ]WN h * [ n] =
∑ G[ k ] ∑ h * [ n]WN
N n=0 k =0
N k =0
n=0
1 N −1
∑ G[ k ] H * [ k ].
N k =0
N −1⎛ N −1
N −1
⎞
5.32 DFT{ r xy [l]} = R xy [l] = ∑ r xy [l]WNlk = ∑ ⎜⎜ ∑ x[ n] y[⟨l + n⟩ N ⎟⎟ WNlk
l=0 ⎝ n=0
l=0
⎠
N −1
⎛ N −1
⎞ N −1
⎛ N −1
⎞
= ∑ x[ n]⎜⎜ ∑ y[⟨l + n⟩ N ]WNlk ⎟⎟ = ∑ x[ n]⎜⎜ ∑ y[ m]WNl( m − n) ⎟⎟
n =0
⎝ l=0
⎠ n=0
⎝ l=0
⎠
Not for sale.
119
N −1
⎛ N −1
⎞
= ∑ x[ n]WN− nk ⎜⎜ ∑ y[ m]WNlm ⎟⎟ = X * [ k ]Y [ k ].
n=0
⎝ l=0
⎠
5.33 Note X [k ] is the MN –point DFT of the sequence x e [n] obtained from x[n] by
appending it with M ( N − 1) zeros. Thus, the length- MN sequence y[n] is given by
M −1
y[ n] = ∑ x e [⟨ n − Nl⟩ MN ], 0 ≤ n ≤ MN − 1. Taking the MN –DFT of both sides we
l =0
⎛ M −1 Nkl ⎞
⎛ M −1
⎞
⎟⎟ X[ k ] = ⎜⎜ ∑ WNkl ⎟⎟ X [ k ].
get Y [ k ] = ⎜⎜ ∑ WMN
⎝ l=0
⎠
⎝ l=0
⎠
9
5.34 (a) X[0] = ∑ x[ n] = 30.
n=0
9
(b) X[5] = ∑ (−1) n x[ n] = 0.
n=0
9
(c)
∑ X[ k ] = 10 ⋅ x[0] = −30.
k =0
9
(d) The inverse DFT of e − j 2 πk / 5 X[ k ] is x[⟨ n − 2⟩ 10 ]. Thus, ∑ e − j 2 πk / 5 X[ k ]
k =0
= 10 ⋅ x[⟨0 − 2⟩ 10 ] = 10 ⋅ x[8] = −100.
9
9
2
2
(e) From Parseval’s relation, ∑ X[ k ] = 10 ⋅ ∑ x[ n] = 38600.
k =0
n=0
5.35 X[7] = X * [⟨−7⟩12 ] = X * [5] = 2 − j, X[8] = X * [⟨−8⟩12 ] = X * [ 4] = −3 − j 2,
X[9] = X * [⟨−9⟩12 ] = X * [3] = 6 − j3, X[10] = X * [⟨−10⟩12 ] = X * [2] = 1 + j12,
X[11] = X * [⟨−11⟩12 ] = X * [1] = 8 + j 2.
(a) x[0] =
1 11
∑ X[ k ] = 4.5,
12 k = 0
(b) x[6] =
1 11
k
∑ (−1) X[ k ] = −0.8333,
12 k = 0
11
(c)
∑ x[ n] = X[0] = 11,
n=0
−4 n
−4 n
x[ n]. Then, DFT{W12
x[ n]} = X [⟨ k − 4⟩ 12 ].
(d) Let g[ n] = e j 2 πn / 3 x[ n] = W12
11
11
n=0
n=0
Thus, ∑ g[ n] = ∑ e j 2 πn / 3 x[ n] = X[⟨0 − 4⟩ 12 ] = X[8] = −3 − j 2,
11
2
(e) From Parseval’s relation, ∑ x[ n] =
n =0
1 11
2
∑ X[ k ] = 74.8333.
12 k =0
Not for sale.
120
6
5.36 Now, yC [ n] = ∑ g[l] h[⟨ n − l⟩ 7 ]. Hence,
l=0
yC [0] = g[0] h[0] + g[1] h[6] + g[2] h[5] + g[3] h[ 4] + g[ 4] h[3] + g[5] h[2] + g[6] h[1],
yC [1] = g[0] h[1] + g[1] h[0] + g[2] h[6] + g[3] h[5] + g[ 4] h[ 4] + g[5] h[3] + g[6] h[2],
yC [2] = g[0] h[2] + g[1] h[1] + g[2] h[0] + g[3] h[6] + g[ 4] h[5] + g[5] h[ 4] + g[6] h[3],
yC [3] = g[0] h[3] + g[1] h[2] + g[2] h[1] + g[3] h[0] + g[ 4] h[6] + g[5] h[5] + g[6] h[ 4],
yC [ 4] = g[0] h[ 4] + g[1] h[3] + g[2] h[2] + g[3] h[1] + g[ 4] h[0] + g[5] h[6] + g[6] h[5],
yC [5] = g[0] h[5] + g[1] h[ 4] + g[2] h[3] + g[3] h[2] + g[ 4] h[1] + g[5] h[0] + g[6] h[6],
yC [6] = g[0] h[6] + g[1] h[5] + g[2] h[ 4] + g[3] h[3] + g[ 4] h[2] + g[5] h[1] + g[6] h[0].
6
Likewise, y L [ n] = ∑ g[l] h[ n − l]. Hence,
l=0
y L [0] = g[0]h[0],
y L [1] = g[0]h[1] + g[1]h[0],
y L [2] = g[0]h[2] + g[1]h[1] + g[2]h[0],
y L [3] = g[0]h[3] + g[1]h[2] + g[2]h[1] + g[3]h[0],
y L [ 4] = g[0]h[ 4] + g[1]h[3] + g[2]h[2] + g[3]h[1] + g[ 4]h[0],
y L [5] = g[0]h[5] + g[1]h[ 4] + g[2]h[3] + g[3]h[2] + g[ 4]h[1] + g[5]h[0],
y L [6] = g[0]h[6] + g[1]h[5] + g[2]h[ 4] + g[3]h[3] + g[ 4]h[2] + g[5]h[1] + g[6]h[0],
y L [7] = g[1]h[6] + g[2]h[5] + g[3]h[ 4] + g[ 4]h[3] + g[5]h[2] + g[6]h[1],
y L [8] = g[2]h[6] + g[3]h[5] + g[ 4]h[ 4] + g[5]h[3] + g[6]h[2],
y L [9] = g[3]h[6] + g[ 4]h[5] + g[5]h[ 4] + g[6]h[3],
y L [10] = g[ 4]h[6] + g[5]h[5] + g[6]h[ 4],
y L [11] = g[5]h[6] + g[6]h[5],
y L [12] = g[6]h[6].
Comparing yC [n] with y L [n] we observe that
yC [0] = y L [0] + y L [7],
yC [1] = y L [1] + y L [8],
yC [2] = y L [2] + y L [9],
yC [3] = y L [3] + y L [10],
yC [ 4] = y L [ 4] + y L [11],
yC [5] = y L [5] + y L [12],
yC [6] = y L [6].
5.37 Since x[n] is a length-9 real sequence, its DFT satisfies X[ k ] = X * [⟨− k ⟩ 9 ]. Therefore,
X[1] = X * [⟨−1⟩ 9 ] = X * [8] = −7.7 + j 3.2,
Not for sale.
121
X[3] = X * [⟨−3⟩ 9 ] = X * [6] = 8.6 + j 9.6,
X[5] = X * [⟨−5⟩ 9 ] = X * [ 4] = −3.5 − j 5.3,
X[7] = X * [⟨−7⟩ 9 ] = X * [2] = 1.2 + j 4.1.
5.38 X[1] = X * [⟨−1⟩ 9 ] = X * [8] = 4.5 − j1.6,
X[ 4] = X * [⟨−4⟩ 9 ] = X * [5] = −3.1 − j8.2,
X[6] = X * [⟨−6⟩ 9 ] = X * [3] = −7.2 + 4.1,
X[7] = X * [⟨−7⟩ 9 ] = X * [2] = 1.2 + j 2.3.
5.39 Since the DFT X [k ] is real-valued, x[n] is a circularly even sequence, i.e.,
x[ n] = x[⟨− n⟩12 ]. Therefore,
x[1] = x[⟨−1⟩12 ] = x[11] = −2,
x[ 4] = x[⟨−4⟩12 ] = x[8] = 9.3,
x[7] = x[⟨−7⟩ 12 ] = x[5] = 4.1,
x[9] = x[⟨−9⟩ 12 ] = x[3] = −3.25,
x[10] = x[⟨−10⟩12 ] = x[2] = 0.7.
5.40 Since the DFT X [k ] is imaginary-valued, x[n] is a circularly odd sequence, i.e.,
x[ n] = − x[⟨− n⟩12 ]. Therefore,
x[7] = − x[⟨−7⟩ 12 ] = − x[5] = 9.3,
x[8] = − x[⟨−8⟩12 ] = − x[ 4] = −2.87,
x[9] = − x[⟨−9⟩12 ] = − x[3] = −4.1,
x[10] = − x[⟨−10⟩12 ] = − x[2] = 3.25,
x[11] = − x[⟨−11⟩12 ] = − x[1] = −0.7.
5.41 X[ k ] = X * [⟨− k ⟩174 ] = X * [174 − k ].
X [9] = X * [174 − 9] = X * [165] = −3.4 + j 5.9 ⇒ X [165] = −3.4 − j 5.9.
X [51] = X * [174 − 51] = X * [123] = 5 − j1.6 ⇒ X [123] = 5 + j1.6.
X [113] = X * [174 − 113] = X * [61] = 8.7 − j 4.9 ⇒ X [61] = 8.7 + j 4.9.
X [162 ] = X * [174 − 162 ] = X * [12 ] = 7.1 − j 2.4 ⇒ X [12 ] = 7.1 + j 2.4.
X[ k1 ] = 7.1 + j 2.4, X[ k 2 ] = 8.7 + j 4.9, X[ k3 ] = 5 + j1.6, X[ k 4 ] = −3.4 − j 5.9.
(a) Comparing these 4 DFT samples with the DFT samples given above we conclude
k1 = 12, k2 = 61, k3 = 123, k 4 = 165.
(b) dc value of {x[ n]} = X [0] = 11.
(c) x[ n] =
1 173
1
− kn
− 9n
− 51n
( X[0] + 2 Re{X[9]W174
} + 2 Re{X[51]W174
}
∑ X[ k ]W174 =
174 k = 0
174
−87 n
−113n
−162 n
+ X [87] W174
+ 2 Re{X [113] W174
} + 2 Re{X [162 ] W174
})
Not for sale.
122
173
(d)
2
∑ x[ n] =
n=0
1 173
2
∑ X[ k ] = 86.0279.
174 k = 0
5.42 X[ k ] = X * [⟨− k ⟩ 126 ] = X * [126 − k ].
X [ 0] = 12.8 + jα.
X [13] = X * [126 − 13] = X * [113] = −3.7 + j 2.2 ⇒ X [113] = −3.7 − j 2.2.
X [ 51] = X * [126 − 51] = X * [75] = − j1.7 ⇒ X [ 75] = j1.7.
X [13] = X * [126 − 13] = X * [113] = −3.7 + j 2.2 ⇒ X [113] = −3.7 − j 2.2.
X[ k1 ] = X * [126 − k1 ] = 9.1 − j 5.4 ⇒ X[126 − k1 ] = 9.1 + j 5.4.
X[ k2 ] = X * [126 − k2 ] = 6.3 + j 2.3 ⇒ X[126 − k2 ] = 6.3 − j 2.3.
X[ k3 ] = X * [126 − k3 ] = γ + j1.7 ⇒ X[126 − k3 ] = γ − j1.7.
X[ k 4 ] = X * [126 − k 4 ] = −3.7 − j 2.2 ⇒ X[126 − k 4 ] = −3.7 + j 2.2.
(a) (b) Since x[n] is a real-valued sequence of length 126, X [0] and X[63] must be
real. Thus, α = 0 and β = 0. As X[126 − k1 ] and X[108] have the same imaginary
part, ε = 9.1 and k1 = 126 − 108 = 18. Likewise, as X[ k2 ] and X [79] have the same
real part, δ = −2.3 and k2 = 126 − 79 = 47. Similarly, as X[126 − k3 ] and X[51] have
the same imaginary part, γ = 0 and k3 = 126 − 51 = 75. Finally, as
X[ k 4 ] = X[113], k 4 = 113.
(c) dc value of x[n] is X[0] = 12.8.
(d) x[ n] =
1 125
1
− kn
− 26 πn / 126
X[0] + 2 Re{X[13]W126
}
∑ X[ k ]W126 =
126 k = 0
126
(
− 36 πn / 126
−94 πn / 126
− 63πn
+ 2 Re{X[18]W126
} + 2 Re{X[ 47]W126
} + X[63]W126
−150πn / 126
− 226πn / 126
+ 2 Re{X[75]W126
} + 2 Re{X[113]W126
} .
)
125
(e)
2
∑ x[ n] =
n=0
1 125
2
∑ X[ k ] = 5.767.
126 k = 0
5.43 Y [ k ] = W3−2 k X [ k ] = W9−6 k X [ k ]. Therefore, y[ n] = x[⟨ n − 6⟩ 9 ]. Thus,
y[ 0] = x[3] = 4, y[1] = x[ 4] = −3, y[ 2] = x[ 5] = 5, y[3] = x[6] = −2, y[ 4] = x[ 7] = −2,
y[ 5] = x[8] = 4, y[6] = x[ 0] = 3, y[ 7] = x[1] = 5, y[8] = x[ 2] = 1.
5.44 H[ k ] = H * [⟨− k ⟩ 9 ] = X * [9 − k ]. Hence, H [ 5] = H * [ 4] = −6.876 − j11.4883,
H [6] = H * [3] = − j8.6603, H [ 7] = H * [ 2] = 6.0346 + j1.957,
H [8] = H * [1] = 6.8414 + j 6.0572 .
Not for sale.
123
Now g[ n] = e j 2 πn / 3 h[ n] = e j 6 πn / 9 h[ n] = W9−6 n h[ n]. Therefore,
G[ k ] = H[⟨ k − 6⟩ 9 ], 0 ≤ k ≤ 8. Thus, G[0] = H[⟨−6⟩ 9 ] = H[3] = j8.6603,
G[1] = H[⟨1 − 6⟩ 9 ] = H[ 4] = −6.876 − j11.4883,
G[2] = H[⟨2 − 6⟩ 9 ] = H[5] = H * [ 4] = −6.876 + j11.4883,
G[3] = H[⟨3 − 6⟩ 9 ] = H[6] = H * [3] = − j8.6603,
G[ 4] = H[⟨ 4 − 6⟩ 9 ] = H[7] = H * [2] = 6.0346 + j1.957,
G[5] = H[⟨5 − 6⟩ 9 ] = H[8] = H * [1] = 6.8414 + j.0572,
G[6] = H[⟨6 − 6⟩ 9 ] = H[0] = 15,
G[7] = H[⟨7 − 6⟩ 9 ] = H[1] = 6.8414 − j 6.0572,
G[8] = H[⟨8 − 6⟩ 9 ] = H[2] = 6.0346 − j1.957.
5.45 (a) y L [0] = g[0] h[0] = −4,
y L [1] = g[0] h[1] + g[1] h[0] = 10,
y L [2] = g[0] h[2] + g[1] h[1] + g[2] h[0] = −6,
y L [3] = g[0] h[3] + g[1] h[2] + g[2] h[1] = 8,
y L [ 4] = g[1] h[3] + g[2] h[2] = 7,
y L [5] = g[2] h[3] = −3.
(b) yC [0] = g e [0] h[0] + g e [1] h[3] + g e [2] h[2] + g e [3] h[1]
= g[ 0]h[ 0] + g[1]h[3] + g[ 2]h[ 2] = 3,
yC [1] = g e [0] h[1] + g e [1] h[0] + g e [2] h[3] + g e [3] h[2]
= g[0]h[1] + g[1]h[ 0] + g[ 2]h[3] = 7,
yC [2] = g e [0] h[2] + g e [1] h[1] + g e [2] h[0] + g e [3] h[3]
= g[ 0]h[ 2] + g[1]h[1] + g[2]h[ 0] = −6,
yC [3] = g e [0] h[3] + g e [1] h[2] + g e [2] h[1] + g e [3] h[0]
= g[0]h[3] + g[1]h[ 2] + g[ 2]h[1] = 8.
⎡Ge [0]⎤ ⎡1 1
1
1 ⎤⎡ 2 ⎤ ⎡ 4 ⎤
⎢ Ge [1] ⎥ ⎢1 − j − 1 j ⎥ ⎢− 1⎥ ⎢− 1 + j ⎥
=
=
,
(c) ⎢
G [2]⎥ ⎢1 − 1 1 − 1⎥ ⎢ 3 ⎥ ⎢ 6 ⎥
⎢ e ⎥ ⎢1 j − 1 j ⎥ ⎢ 0 ⎥ ⎢ − 1 − j ⎥
⎦⎣ ⎦ ⎣
⎦
⎣Ge [3]⎦ ⎣
⎡ H[0]⎤ ⎡1 1
1
1 ⎤ ⎡− 2⎤ ⎡ 3 ⎤
⎢ H [1] ⎥ ⎢1 − j − 1 j ⎥ ⎢ 4 ⎥ ⎢ − 4 − j 5⎥
⎢ H[2]⎥ = ⎢1 − 1 1 − 1⎥ ⎢ 2 ⎥ = ⎢ − 3 ⎥.
⎢ H [3]⎥ ⎢⎣1 j − 1 j ⎥⎦ ⎣⎢ − 1 ⎦⎥ ⎢⎣− 4 + j 5⎥⎦
⎦
⎣
⎡YC [0]⎤ ⎡Ge [0]H [0]⎤ ⎡ 12 ⎤
⎢ YC [1] ⎥ ⎢ Ge [1]H [1] ⎥ ⎢9 + j ⎥
⎢Y [2]⎥ = ⎢G [2]H[2]⎥ = ⎢ − 18 ⎥. Therefore
⎥ ⎢9 − j ⎥
⎢ C ⎥ ⎢ e
⎦
⎣YC [3]⎦ ⎣ Ge [3]H[3]⎦ ⎣
Not for sale.
124
⎡ yC [0]⎤
1
1 ⎤ ⎡ 12 ⎤ ⎡ 3 ⎤
⎡1 1
⎢ yC [1] ⎥ 1 ⎢1 j − 1 − j ⎥ ⎢9 + j ⎥ ⎢ 7 ⎥
⎢ y [2]⎥ = ⎢1 − 1 1 − 1⎥ ⎢ − 18 ⎥ = ⎢− 6 ⎥.
⎢ C ⎥ 4 ⎢1 − j − 1 j ⎥ ⎢9 − j ⎥ ⎢ 8 ⎥
⎣
⎦⎣
⎦ ⎣ ⎦
⎣ yC [3]⎦
(d) g e [ n] = [2, − 1, 3, 0, 0, 0], he [ n] = [− 2, 4, 2, − 1, 0, 0].
yC [0] = g e [0] he [0] + g e [1] he [5] + g e [2] h e [ 4] + g e [3] he [3] + g e [ 4] he [2] + g e [5] he [1]
= g[0]h[0] = −4 = y L [0],
yC [1] = g e [0] he [1] + g e [1] he [0] + g e [2] h e [5] + g e [3] he [6] + g e [ 4] he [3] + g e [5] he [2]
= g[0]h[1] + g[1]h[0] = 10 = y L [1],
yC [2] = g e [0] he [2] + g e [1] he [1] + g e [2] h e [0] + g e [3] he [5] + g e [ 4] he [ 4] + g e [5] he [3]
= g[0]h[2] + g[1]h[1] + g[2]h[0] = −6 = y L [2],
yC [3] = g e [0] he [3] + g e [1] he [2] + g e [2] h e [1] + g e [3] he [0] + g e [ 4] he [5] + g e [5] he [ 4]
= g[0]h[3] + g[1]h[2] + g[2]h[1] = 8 = y L [3],
yC [ 4] = g e [0] he [ 4] + g e [1] he [3] + g e [2] h e [2] + g e [3] he [1] + g e [ 4] he [0] + g e [5] he [5]
= g[1]h[3] + g[2]h[2] = 7 = y L [ 4],
yC [5] = g e [0] he [5] + g e [1] he [ 4] + g e [2] h e [3] + g e [3] he [2] + g e [ 4] he [1] + g e [5] he [0]
= g[2]h[3] = −3 = y L [5].
5.46 We need to show g[ n] O
N h[ n] = h[ n] O
N g[ n]. Let
N −1
x[ n] = g[ n] O
N h[ n] = ∑ g[ m ]h[ ⟨ n − m⟩ N ] and
m=0
N −1
n
N −1
m=0
N −1
m = n +1
y[ n] = h[ n] O
N g[ n] = ∑ h[ m ]g[ ⟨ n − m⟩ N ] = ∑ h[ m ]g[ n − m ] +
n
= ∑ h[ n − m]g[ m] +
m =0
m=0
N −1
∑ h[ m]g[ N + n − m]
∑ h[ N + n − m]g[ m] = ∑ h[⟨ n − m⟩ N ]g[ m] = x[ n].
m = n +1
m=0
N −1
5.47 (a) y[ n] = x1[ n] O
N x 2 [ n] = ∑ x1[ m ] x 2 [ ⟨ n − m⟩ N ]. Thus,
m=0
N −1
N −1
N −1
⎛ N −1
⎞⎛ N −1
⎞
∑ y[ n] = ∑ x1[ m] ∑ x[⟨ n − m⟩ N ] = ⎜⎜ ∑ x1[ n] ⎟⎟⎜⎜ ∑ x 2 [ n] ⎟⎟.
n=0
m =0
n =0
⎝ n=0
⎠⎝ n = 0
⎠
(b)
N −1
N −1
N −1
n
n
∑ (−1) y[ n] = ∑ x1[ m] ∑ x[⟨ n − m⟩ N ](−1)
n=0
⎛ N −1
m=0
n=0
⎞⎛ m −1
= ⎜⎜ ∑ x1[ m] ⎟⎟⎜⎜ ∑ x 2 [ N + m − n](−1) n
⎝ m =0
⎠⎝ n = 0
N −1
⎞
+ ∑ x 2 [ m − n](−1) n ⎟⎟. Replacing n by
n=m
⎠
Not for sale.
125
N + n − m in the first sum on the right-hand side and by n − m in the second sum on
the right-hand side we obtain
N −1
N −1
⎛ N −1
⎞⎛ m −1
⎞
n
n−N +m
+ ∑ x 2 [ n](−1) n + m ⎟⎟
∑ (−1) y[ n] = ⎜⎜ ∑ x1[ m] ⎟⎟⎜⎜ ∑ x 2 [ n](−1)
n =0
n=m
⎝ m =0
⎠⎝ n = 0
⎠
⎛ N −1
⎞⎛ N −1
⎞
= ⎜⎜ ∑ (−1) n x1[ n] ⎟⎟⎜⎜ ∑ (−1) n x 2 [ n] ⎟⎟.
⎝ n=0
⎠⎝ n = 0
⎠
5.48 y[ n] = x[3n], 0 ≤ n ≤
Now, x[ n] =
Y [k ] =
N
3
N
−1
3
N
−1
3
n=
n=
− 1. Therefore, Y [ k ] = ∑ y[ n]WNnk/ 3 = ∑ x[ 4 n]WNnk/ 3 .
N −1
N −1
1
1
− mn
− 3mn
=
∑ X [ m ] WN
∑ X [ m]WN / 3 . Hence,
N m =0
N m=0
N
−1
N −1
3
1 N −1
N
−1
3
1
( k − m )n
− mn nk
∑ ∑ X [ m ] WN / 3 WN / 3 =
∑ X[ m] ∑ WN / 3 . Since
N n =0 m =0
N m=0
n=0
N
−1
3
N
2N
⎧N
, k + N,
( k − m )n ⎪ , m = k , k + , k +
Thus,
=⎨3
∑ WN / 3
3
3
⎪⎩ 0,
n=0
elsewhere.
1
N
2N
Y [ k ] = ⎛⎜ X [ k ] + X [ k + ] + X [ k +
] + X [ k + N ] ⎞⎟.
3
3
⎠
3⎝
1
2
5.49 v[ n] = x[ n] + jy[ n]. Hence, X[ k ] = {V [ k ] + V * [⟨− k ⟩ 8 ]} is the 8 –point DFT of x[n]
and Y [ k ] =
1
{V [ k ] − V * [⟨− k ⟩ 8 ]} is the
2j
8 –point DFT of y[n].
V [ k ] = [3 + j 7, − 2 + j 6, 1 − j 5, 4 − j 9, 5 + j 2, 3 − j 2, j 4, − 3 − j8].
V * [⟨− k ⟩ 8 ] = [3 + j 7, − 3 + j8, − j 4, 3 + j 2, 5 − j 2, 4 + j 9, 1 + j 5, − 2 − j 6].
Therefore,
5
1
9
7
7
7
7
5
1
9
X[ k ] = ⎡3 + j 7, − + j 7,
+ j ,
− j , 5,
+ j ,
− j , − − j 7 ⎤,
⎥⎦
⎢⎣
2
2
2
2
2
2
2
2
2
2
1
1
1
11
1
11
1
1
1
1
Y [ k ] = ⎡0, − 1 − j , − − j , − − j , 2, − + j , − + j , − 1 + j ⎤.
⎢⎣
2 ⎥⎦
2
2
2
2
2
2
2
2
2
The IDFT of V [k ] obtained using MATLAB is given by
Columns 1 through 4
1.3750 - 0.6250i
-0.9331 - 0.1187i
-0.8044 + 1.7223i
-1.7500 + 1.2500i
Columns 5 through 8
0.8750 + 2.6250i
-1.8169 + 1.1187i
2.5544 - 0.2223i
Not for sale.
3.5000 + 1.2500i
126
The same result is obtained by computing the IDFT x[n] of X [k ] and the IDFT y[n]
of Y [k ] using MATLAB and then forming x[ n] + jy[ n].
5.50 v[ n] = g[ n] + j h[ n] = [2 − j 2, − 1 + j 4, 3 + j 2, − j ]. Therefore,
⎡V [0]⎤ ⎡1 1
1
1 ⎤ ⎡ 2 − j 2 ⎤ ⎡ 4 + j3 ⎤
⎢ V [1] ⎥ ⎢1 − j − 1 j ⎥ ⎢− 1 + j 4⎥ ⎢ 4 − j 3 ⎥
⎢V [2]⎥ = ⎢1 − 1 1 − 1⎥ ⎢ 3 + j 2 ⎥ = ⎢ 6 − j 3 ⎥, i.e.,
⎢V [3]⎥ ⎢⎣1 j − 1 − j ⎥⎦ ⎢ − j ⎥ ⎢− 6 − j 5⎥
⎣
⎦
⎦
⎦ ⎣
⎣
V [ k ] = [4 + j3, 4 − j3, 6 − j3, − 6 − j 5].
Thus, V * [⟨− k ⟩ 4 ] = [4 + j3, − 6 + j 5, 6 + j 3, 4 + j3]. Therefore,
) [
(
1
V [ k ] + V * [⟨− k ⟩ 4 ] = 4,
2
1
H[ k ] =
V [ k ] − V * [⟨− k ⟩ 4 ] = 3,
2j
G[ k ] =
) [
(
− 1 + j, 6, − 1 − j ] and
− 4 − j 5, − 3, − 4 + j 5].
5.51 Let p[ n] = IDFT{P[ k ]}. Thus,
⎡ p[0]⎤
1
1 ⎤ ⎡ − 5 ⎤ ⎡ − 1.25 ⎤
⎡1 1
⎢ p[1] ⎥ 1 ⎢1 j − 1 − j ⎥ ⎢− 2 + j 5⎥ ⎢− 4.75⎥
⎢ p[2]⎥ = ⎢1 − 1 1 − 1⎥ ⎢ 4 ⎥ = ⎢ 0.75 ⎥
⎥ 4 ⎢1 − j − 1 j ⎥ ⎢− 2 − j 5⎥ ⎣⎢ 0.25 ⎦⎥
⎢
⎦⎣
⎣
⎦
⎣ p[3]⎦
⎡d[0]⎤
1
1 ⎤⎡ 3 ⎤ ⎡ 1 ⎤
⎡1 1
⎢ d[1] ⎥ 1 ⎢1 j − 1 − j ⎥ ⎢4 + j ⎥ ⎢ 2 ⎥
⎢d[2]⎥ = 4 ⎢1 − 1 1 − 1⎥ ⎢ − 7 ⎥ = ⎢− 3⎥. Therefore,
⎢ d[3]⎥
⎢⎣1 − j − 1 j ⎥⎦ ⎢⎣4 − j ⎥⎦ ⎢⎣ 3 ⎥⎦
⎦
⎣
X ( e jω ) =
− 1.25 − 4.75 e − jω + 0.75 e − j 2 ω + 0.25 e − j 3ω
.
1 + 2 e − j ω − 3 e − j 2 ω + 3 e − j 3ω
5.52 Let p[ n] = IDFT{P[ k ]}. Thus,
⎡ p[0]⎤
1
1 ⎤ ⎡ 8 ⎤ ⎡ − 1.25 ⎤
⎡1 1
⎢ p[1] ⎥ 1 ⎢1 j − 1 − j ⎥ ⎢− 5 − j 6 ⎥ ⎢ 5.75 ⎥
⎢ p[2]⎥ = ⎢1 − 1 1 − 1⎥ ⎢ − 3 ⎥ = ⎢ 3.75 ⎥
⎥ 4 ⎢1 − j − 1 j ⎥ ⎢− 5 + j 6 ⎥ ⎢⎣− 0.25⎥⎦
⎢
[
3
]
p
⎦⎣
⎣
⎦
⎦
⎣
⎡d[0]⎤
1
1 ⎤ ⎡ 3 ⎤ ⎡ 2.75 ⎤
⎡1 1
⎢ d[1] ⎥ 1 ⎢1 j − 1 − j ⎥ ⎢4 + j ⎥ ⎢− 3.75⎥
⎢d[2]⎥ = 4 ⎢1 − 1 1 − 1⎥ ⎢ − 7 ⎥ = ⎢− 3.25⎥. Therefore,
⎢ d[3]⎥
⎢⎣1 − j − 1 j ⎥⎦ ⎢⎣4 − j ⎥⎦ ⎣⎢ − 1.75 ⎦⎥
⎦
⎣
X (e
jω
)=
− 1.25 + 54.75 e − jω + 3.75 e − j 2 ω − 0.25 e − j 3ω
2.75 − 3.75 e − jω − 3.25 e − j 2ω − 1.75 e − j 3ω
N −1
N −1
n=0
n=0
.
5.53 X (e jω ) = ∑ x[ n] e − jωn and Xˆ [ k ] = ∑ x[ n] e − j 2 πkn / M . Now,
Not for sale.
127
xˆ[ n] =
1 M −1 ˆ
1 M −1 N −1
− j 2 πkm / M − nk
− nk
WM
∑ X [ k ] WM =
∑ ∑ x[ m] e
M k =0
M k =0 m =0
N −1
∞
1 N −1
− j 2 πk ( m − n ) / M
= ∑ x[ n + rM ].
∑ x[ m] ∑ e
M m =0
k =0
r = −∞
Thus, xˆ[ n] is obtained by shifting x[n] in multiples of M and adding the shifted
copies. Since the new sequence is obtained by shifting in multiples of hence, to recover
the original sequence take any consecutive N samples in the range 0 ≤ n ≤ N − 1 for
any value of r. This would be true only if the shifted copies of x[n] did not overlap
with each other, that is, if and only if M ≥ N .
=
8
8
n=0
n=0
5.54 (a) X (e jω ) = ∑ x[ n] e − jωn . Therefore, X1[ k ] = ∑ x[ n] e − j 2 πkn / 12 . Hence,
x1[ n] =
1 11
1 11 ⎛ 8
j 2 πkn / 12
j 2 πkm / 12 ⎞⎟ j 2 πkn / 12
=
∑ X[ k ] e
∑ ⎜⎜ ∑ x[ m] e
⎟e
12 k = 0
12 k = 0 ⎝ m = 0
⎠
11
∞
1 8
j 2 πk ( n − m ) / 12
= ∑ x[ n + 12r ] using the results of Problem 5.53.
∑ x[ m] ∑ e
12 m = 0
k =0
r = −∞
Since M = 12 and N = 9, M > N , and hence, x[n] is recoverable from x1[ n]. In fact
x1[ n] = {1, − 2, 3, − 4, 5, − 4, 3, − 2, 1, 0, 0, 0}, 0 ≤ n ≤ 11, and x[n] is
given by the first 9 samples of x1[ n].
=
8
(b) Here, X 2 [ k ] = ∑ x[ n] e − j 2 πkn / 8 . Hence,
n=0
x1[ n] =
7 ⎛ 8
⎞
1 7
j 2 πkn / 8 1
= ∑ ⎜⎜ ∑ x[ m] e j 2 πkm / 8 ⎟⎟ e j 2 πkn / 8
∑ X[ k ] e
8 k =0
8 k =0 ⎝ m =0
⎠
7
∞
1 8
j 2 πk ( n − m ) / 8
= ∑ x[ n + 8r ] using the results of Problem 5.53.
∑ x[ m] ∑ e
8 m =0
k =0
r = −∞
Since M = 8 and N = 9, M < N , and hence, x[n] is not recoverable from x1[ n]. In
fact x 2 [ n] = [2, − 2, 3, − 4, 5, − 4, 3, − 2, 2, − 1, 1], 0 ≤ n ≤ 10.
=
1 N −1
− kn
∑ X[ k ]WN . Let n = N − m. Then,
N k =0
1 N −1
1 N −1
1
− k( N − m)
km
x[ m] =
=
∑ X [ k ] WN
∑ X[ k ]WN = F {X [ k ]}. Therefore,
N k =0
N k =0
N
1
1
F { F {x[ n]}}, or, F { F {x[ n]}} = N ⋅ x[ N − n]. Hence,
x[ N − n] = F {X [ k ]} =
N
N
5.55 x[ n] =
F { F { F { F {x[ n]}}}} = N 2 ⋅ x[ N − n].
Not for sale.
128
100
100
k =0
50
k =0
36
5.56 y[ n] = x[ n] O
* h[ n] = ∑ x[ k ] h[ n − k ] = ∑ h[ k ] x[ n − k ] = ∑ h[ k ] x[ n − k ].
k =17
36
u[ n] = x[ n] O
N h[ n] = ∑ h[ k ] x[ ⟨ n − k ⟩ 51 ] = ∑ h[ k ] x[ ⟨ n − k ⟩ 51 ].
k =0
k =17
Now, for n ≥ 36, x[⟨ n − k ⟩ 51 ] = x[ n − k ]. Thus, y[ n] = u[ n] for 36 ≤ n ≤ 50.
5.57 (a) Overlap-add method: Since the impulse response is of length and the DFT size to
be used is 128, hence, the number of data samples required for each convolution will be
128 − 109 = 19. Thus the total number of DFTs required for the length- 1300 data
1300 ⎤
= 69. Also, the DFT of the impulse response needs to be computed
sequence is ⎡
⎢ 19 ⎥
once. Hence, the total number of DFTs used are = 69 + 1 = 70. The total number of
IDFTs used are = 69.
(b) Overlap-save method: In this case, since the first 110 − 1 = 109 points are lost, we
need to pad the data sequence with 109 zeros for a total length of 1409. Again, each
convolution will result in 128 − 109 = 19 correct values. Thus the total number of
1409 ⎤
= 75. Again, 1 DFT is required for the impulse
DFTs required for the data are ⎡
⎢ 19 ⎥
response. The total number of DFTs used are 75 + 1 = 76. The total number of IDFTs
used are = 75.
⎧ x[ n / L ], n = 0, L, 2 L,K, ( N − 1)L,
5.58 (a) y[ n] = ⎨
elsewhere.
⎩ 0,
NL −1
N −1
N −1
n=0
n=0
n=0
nk
nLk
= ∑ x[ n]WNL
= ∑ x[ n]WNnk . For k ≥ N , let k = k o + rN
Y [ k ] = ∑ y[ n]WNL
N −1
n( k o + rN )
where ko = ⟨ k ⟩ N . Then, Y [ k ] = Y [ k o + rN ] = ∑ x[ n]WN
n=0
N −1
nk o
= ∑ x[ n]WN
n=0
= X[ ko ] = X[⟨ k ⟩ N ].
(b) Since Y [ k ] = X[⟨ k ⟩ 5 ] for 0 ≤ k ≤ 20, a sketch of Y [k ] is thus as shown below.
5.59 x 0 [ n] = x[2 n + 1] + x[2n], x1[ n] = x[2 n + 1] − x[2n], y0 [ n] = y[2n + 1] + y[2n], and
y1[ n] = y[2n + 1] − y[2n], 0 ≤ n ≤
N
2
− 1. Since x[n] and y[n] are real, symmetric
sequences, it follows that x 0 [ n] and y0 [ n] are real, symmetric sequences, and x1[ n]
and y1[ n] are real, antisymmetric sequences. Now, consider the
N
2
–length sequence
u[ n] = x 0 [ n] + y1[ n] + j (x1[ n] + y0 [ n]). Its conjugate sequence is given by
u * [ n] = x 0 [ n] + y1[ n] − j (x1[ n] + y0 [ n]). Next, we observe that
u[⟨− n⟩ N / 2 ] = x 0 [⟨− n⟩ N / 2 ] + y1[⟨− n⟩ N / 2 ] + j (x1[⟨− n⟩ N / 2 ] + y0 [⟨− n⟩ N / 2 ])
Not for sale.
129
= x 0 [ n] − y1[ n] + j (− x1[ n] + y0 [ n]). Its conjugate sequence is given by
u * [⟨− n⟩ N / 2 ] = x 0 [ n] − y1[ n] − j (− x1[ n] + y0 [ n]).
By adding the last 4 sequences we get
4 x 0 [ n] = u[ n] + u * [ n] + u[⟨− n⟩ N / 2 ] + u * [⟨− n⟩ N / 2 ].
From Table 5.3, if U [ k ] = DFT{u[ n]}, then U * [⟨− k ⟩ N / 2 ] = DFT{u * [ n]},
U * [ k ] = DFT{u * [⟨− n⟩ N / 2 ]}, and U[⟨− k ⟩ N / 2 ] = DFT{u[⟨− n⟩ N / 2 ]}. Thus,
1
4
X 0 [ k ] = DFT{x 0 [ n]} =
(U[k ] + U * [⟨− k⟩ N / 2 ] + U[⟨− k⟩ N / 2 ] + U * [k ]).
Similarly,
j 4 x1[ n] = u[ n] − u * [ n] − u[⟨− n⟩ N / 2 ] + u * [⟨− n⟩ N / 2 ]. Hence,
X1[ k ] = DFT{x1[ n]} =
(
)
1
U[ k ] − U * [⟨− k ⟩ N / 2 ] − U[⟨− k ⟩ N / 2 ] + U * [ k ] . Likewise,
j4
4 y1[ n] = u[ n] − u[⟨− n⟩ N / 2 ] + u * [ n] − u * [⟨− n⟩ N / 2 ]. Thus,
Y1[ k ] = DFT{y1[ n]} =
1
4
(U[k ] − U[⟨− k⟩ N / 2 ] + U * [⟨− k⟩ N / 2 ] − U * [k ]). Finally,
j 4 y0 [ n] = u[ n] + u[⟨− n⟩ N / 2 ] − u * [ n] − u * [⟨− n⟩ N / 2 ]. Hence,
Y0 [ k ] = DFT{y0 [ n]} =
N −1
(
5.60 X GDFT [ k, a, b] = ∑ x[ n] e
n=0
j
1 N −1
x[ n] =
∑ X[ k ] e
N k =0
j
1 N −1 N − 1
=
∑ ∑ x[r ] e
N k =0 r =0
N −1 j
1 N −1
=
∑ x[r ] ∑ e
N r =0
k =0
N −1
∑ e
j
2 π( n − r )( k + b )
N
k =0
)
1
U[ k ] + U[⟨− k ⟩ N / 2 ] − U * [⟨− k ⟩ N / 2 ] − U * [ k ] .
j4
−j
2 π( n + a )( k + b )
N
.
2 π( n + a )( k + b )
N
−j
1 N −1 N − 1
=
∑ ∑ x[r ] e
N k =0 r =0
2 π( n + a − r − a )( k + b )
N
2 π( n − r )( k + b )
N
=
2 π( r + a ) k + b )
N
j
1 N −1 N − 1
=
∑ ∑ x[r ] e
N k =0 r =0
j
e
2 π( n + a ) k + b )
N
2 π( n − r )( k + b )
N
1
⋅ x[ n] ⋅ N = x[ n], as from Eq. (5.23)
N
N , if n = r ,
= ⎧⎨
⎩ 0, otherwise.
5.61 (a) x[ n] = α g[ n] + β h[ n]. Thus,
N −1
N −1
πk (2 n +1) ⎞
πk (2 n + 1) ⎞
X DCT [ k ] = ∑ x[ n] cos⎛⎜
⎟ = ∑ (α g[ n] + β h[ n]) cos⎛⎜
⎟
⎝ 2N ⎠ n=0
⎝ 2N ⎠
n=0
N −1
N −1
πk (2 n +1) ⎞
πk (2 n + 1) ⎞
= ∑ α g[ n] cos⎛⎜
⎟ + ∑ β h[ n] cos⎛⎜
⎟ = α G DCT [ k ] + β H DCT [ k ].
⎝ 2N ⎠ n =0
⎝ 2N ⎠
n=0
Not for sale.
130
N −1
N −1
πk (2 n + 1) ⎞
πk (2 n + 1) ⎞
(b) G DCT [ k ] = ∑ g[ n] cos⎛⎜
⎟ ⇒ G *DCT [ k ] = ∑ g * [ n] cos⎛⎜
⎟.
⎝ 2N ⎠
⎝ 2N ⎠
n=0
n=0
DCT
Therefore, g * [ n] ↔ G *DCT [ k ].
N , if k = m = 0,
⎧
N −1
πk (2 n +1) ⎞
πm(2 n +1) ⎞ ⎪
(c) Note that ∑ cos⎛⎜
⎟ cos⎛⎜
⎟ = ⎨ N/2, if k = m and k ≠ 0, Now,
⎝ 2N ⎠ ⎝ 2N ⎠ ⎪
n=0
0, otherwise.
⎩
g[ n] g * [ n] =
1 N −1 N −1
N2
π(2 n +1)k ⎞
π(2 n +1)k ⎞
*
⎟ cos⎛⎜
⎟.
∑ α[ k ] α[ m] G DCT [ k ]G DCT [ m] cos⎛⎜
⎝ 2N ⎠ ⎝ 2N ⎠
k =0 m =0
∑
Thus,
N −1
2
∑ g[ n] =
n=0
1 N −1 N − 1 N − 1
N2
π(2 n +1)k ⎞
π(2 n +1)k ⎞
*
⎟ cos⎛⎜
⎟.
∑ α[ k ] α[ m] G DCT [ k ]G DCT [ m] cos⎛⎜
2
N
2N
⎝
⎠
⎝
⎠
n=0 k =0 m =0
∑ ∑
Using the orthogonality property mentioned earlier we get
N −1
2
∑ g[ n] =
n=0
5.62 (a) HN
where I
H N H TN
2
1 N −1
∑ α[ k ] G DCT [ k ] .
2N k =0
⎡13
⎢17
=⎢
⎢13
⎢
⎣7
is the
⎡13
= ⎢17
⎢13
⎣⎢ 7
13
13
13 ⎤
− 7 − 17⎥⎥
7
. The matrix H N is orthogonal if H N H TN = cI
− 13 − 13 13 ⎥
⎥
− 17 17
−7⎦
4 × 4 identity matrix and c is a constant. Now,
13
13
13 ⎤ ⎡13 17
13
7 ⎤ ⎡676 0
0
0 ⎤
7
0 ⎥.
− 13 − 17⎥ = ⎢ 0 676 0
− 7 − 17⎥ ⎢13 7
0 676 0 ⎥
− 13 − 13 13 ⎥ ⎢13 − 7 − 13 17 ⎥ ⎢ 0
0
0 676⎦⎥
− 17 17
− 7 ⎦⎥ ⎣⎢13 − 17 13 − 7 ⎦⎥ ⎣⎢ 0
Hence, the matrix is orthogonal and all its rows have the same L 2 -norm.
1
1 ⎤
⎡1 1
⎢2 1 − 1 − 2 ⎥
⎥. Next, we observe
(b) G N = ⎢
⎢1 − 1 − 1 1 ⎥
⎢
⎥
⎣1 − 2 2 − 1 ⎦
1
1 ⎤ ⎡4 0 0 0 ⎤
1
1 ⎤ ⎡1 2
⎡1 1
1
1
1
2
1
1
2
−
−
−
−
⎢
⎥
⎢
⎥ ⎢0 10 0 0 ⎥
= 1 −1 −1 1 1 −1 −1 − 2
2⎥ = ⎢0 0 4 0 ⎥ which shows that
⎢
⎥⎢
⎢⎣1 − 2 2 − 1⎥⎦ ⎢⎣1 − 2 1 − 1⎥⎦ ⎢⎣0 0 0 10⎥⎦
the rows of G N are orthogonal but do not have the same L 2 -norms.
G N G TN
Not for sale.
131
1
1
1 ⎤ ⎡1 1 ⎤ = ⎡1
5.63 (a) H 2 = ⎡1 1 ⎤. Now, H t2 H 2 = ⎡1
2
2 ⎢⎣1 − 1⎦⎥ ⎢⎣1 − 1⎦⎥ ⎢⎣0
⎣⎢1 − 1⎥⎦
H2 ⎤
⎡H
. Thus,
H4 = ⎢ 2
⎣H 2 − H 2 ⎥⎦
⎡1
t
H t2 ⎤ ⎡H 2 H 2 ⎤ 1 ⎡4I 2 4I 2 ⎤ ⎢0
1 t
1 ⎡H 2
H H = ⎢ t
=
=
t ⎥ ⎢H
− H 2 ⎥⎦ 4 ⎢⎣4I 2 4I 2 ⎥⎦ ⎢0
4 4 4
4 ⎢H
⎣ 2 − H 2 ⎦⎥ ⎣ 2
⎢⎣0
1
N
H tN H N =
1
N
⎡H t
⎢ tN / 2
⎢⎣H N / 2
H tN / 2 ⎤ ⎡H N / 2
⎥
− H tN / 2 ⎥⎦ ⎢⎣H N / 2
0⎤ = I .
2
1 ⎥⎦
0
1
0
0
0
0
1
0
H N / 2 ⎤ 1 ⎡ NI N / 2
=
− H N / 2 ⎥⎦ N ⎢⎣ NI N / 2
0⎤
0⎥ = I .
4
0⎥
1⎥⎦
NI N / 2 ⎤
= IN .
NI N / 2 ⎥⎦
N −1
1
1
2
(b) From Eq. (5.172), ∑ x[ n] = x t x = ⎛⎜ H tN X Haar ⎞⎟ ⎛⎜ H tN X Haar ⎞⎟
⎠
⎠ ⎝N
⎝N
n=0
t
=
1
N2
X tHaar H N H tN X Haar =
1
N
X tHaar X Haar =
1 N −1
2
∑ X Haar [ k ]
N k =0
as from Eq.
(5.171) H N H tN + N .
N −1
2 πnk ⎞
2 πnk ⎞ ⎞
5.64 X DHT [ k ] = ∑ x[ n] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟ ⎟. Now,
⎝ N ⎠⎠
⎝ ⎝ N ⎠
n=0
2 πmk ⎞
2 πmk ⎞ ⎞
X DHT [ k ]⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟⎟
N
N ⎠⎠
⎝
⎠
⎝
⎝
N −1
2 πnk ⎞
2 πnk ⎞ ⎞⎛
2 πmk ⎞
2 πmk ⎞ ⎞
= ∑ x[ n] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟ ⎟⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟ ⎟. Therefore,
⎝ N ⎠ ⎠⎝ ⎝ N ⎠
⎝ N ⎠⎠
⎝ ⎝ N ⎠
n=0
N −1
2 πmk ⎞
2 πmk ⎞ ⎞
⎟ + sin⎛⎜
⎟⎟
∑ X DHT [ k ]⎛⎜ cos⎛⎜
⎝ N ⎠⎠
⎝ ⎝ N ⎠
k =0
N −1
N −1
2 πnk ⎞
2 πnk ⎞ ⎞⎛
2 πmk ⎞
2 πmk ⎞ ⎞
= ∑ x[ n] ∑ ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟ ⎟⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟ ⎟.
⎝ N ⎠
⎝ N ⎠ ⎠⎝ ⎝ N ⎠
⎝ N ⎠⎠
n=0
k =0 ⎝
⎧ N , if m = n = 0,
⎪ N / 2, if m = n ≠ 0,
It can be shown that
=⎨
N / 2, if m = N − n,
⎪
⎩ 0, otherwise,
⎧ N , if m = n = 0,
N −1
π
π
2
nk
2
mk
⎞⎟ ⋅ sin⎛⎜
⎞⎟ = ⎪ N / 2, if m = n ≠ 0,
∑ sin⎛⎜
⎨
⎝ N ⎠
⎝ N ⎠ ⎪− N / 2, if m = N − n,
k =0
0, otherwise,
⎩
N −1
2 πnk ⎞
2 πmk ⎞
⎟ ⋅ cos⎛⎜
⎟
∑ cos⎛⎜
⎝ N ⎠
⎝ N ⎠
k =0
N −1
N −1
2 πnk ⎞
2 πmk ⎞
2 πnk ⎞
2 πmk ⎞
⎟ ⋅ cos⎛⎜
⎟ = ∑ cos⎛⎜
⎟ ⋅ sin⎛⎜
⎟ = 0.
∑ sin⎛⎜
⎝ N ⎠
⎝ N ⎠ k =0 ⎝ N ⎠
⎝ N ⎠
k =0
Hence, x[ m] =
1 N −1
2 πmk ⎞
2 πmk ⎞ ⎞
⎟ + sin⎛⎜
⎟ ⎟.
∑ X DHT [ n] ⎛⎜ cos⎛⎜
⎝ N ⎠⎠
⎝ ⎝ N ⎠
N n=0
Not for sale.
132
⎧ x[ n − no + N ], 0 ≤ n ≤ no − 1,
5.65 (a) y[ n] = x[⟨ n − no ⟩ N ] = ⎨
n o ≤ n ≤ N − 1.
⎩ x[ n − no ],
N −1
2 πnk ⎞
2 πnk ⎞ ⎞
YDHT [ k ] = ∑ y[ n] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟⎟
⎝ N ⎠⎠
⎝ ⎝ N ⎠
n=0
n −1
o
2 πnk ⎞
2 πnk ⎞ ⎞ N −1
2 πnk ⎞
2 πnk ⎞ ⎞
= ∑ x[ n − no + N ] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟ ⎟ + ∑ x[ n − no ] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟⎟ .
⎝ N ⎠⎠ n=n
⎝ N ⎠⎠
⎝ ⎝ N ⎠
⎝ ⎝ N ⎠
n=0
o
Replacing n − no + N by n in the first sum and n − no by n in the second sum we get
YDHT [ k ] =
N −1
2 π( n + n o )k ⎞
2 π( n + n o )k ⎞ ⎞
x[ n] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟⎟
N
N
⎠
⎝
⎠⎠
⎝ ⎝
n = N − no
∑
n −1
o
2 π( n + n o ) k ⎞
2 π( n + n o ) k ⎞ ⎞
+ ∑ x[ n] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟⎟
N
N
⎠
⎝
⎠⎠
⎝ ⎝
n=0
N −1
2 π( n + n o ) k ⎞
2 π( n + n o ) k ⎞ ⎞
= ∑ x[ n] ⎛⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟⎟
N
N
⎠
⎝
⎠⎠
⎝ ⎝
n=0
2 πn o k ⎞ N −1
2 πnk ⎞
2 πnk ⎞ ⎞
⎛
= cos⎛⎜
⎟ + sin⎛⎜
⎟⎟
⎟ ∑ x[ n] ⎜ cos⎛⎜
⎝ N ⎠⎠
⎝ N ⎠n=0
⎝ ⎝ N ⎠
2 πn o k ⎞ N −1
2 πnk ⎞
2 πnk ⎞ ⎞
⎛
+ sin⎛⎜
⎟ − sin⎛⎜
⎟⎟
⎟ ∑ x[ n] ⎜ cos⎛⎜
⎝ N ⎠⎠
⎝ N ⎠n=0
⎝ ⎝ N ⎠
2 πn o k ⎞
2 πn o k ⎞
= cos⎛⎜
[ −k ].
⎟ X DHT [ k ] + sin⎛⎜
⎟X
⎝ N ⎠
⎝ N ⎠ DHT
(b) The N –point DHT of x[⟨− n⟩ N ] is X DHT[ −k ] .
N −1
1 N-1 N −1
∑ ∑ X DHT [ k ]X DHT [l] ×
n=0
N 2 k =0 l=0
⎛ N −1⎛ ⎛ 2 πnk ⎞
2 πnk ⎞ ⎞⎛
2 πnl ⎞
2 πnl ⎞ ⎞ ⎞
⎜⎜ ∑ ⎜ cos⎜
⎟ + sin⎛⎜
⎟ ⎟⎜ cos⎛⎜
⎟ + sin⎛⎜
⎟ ⎟ ⎟.
⎝ N ⎠ ⎠⎝ ⎝ N ⎠
⎝ N ⎠ ⎠ ⎟⎠
⎝ n=0 ⎝ ⎝ N ⎠
Using the orthogonality property, we observe that the above product is equal to N if
N −1
1 N −1
2
k = l and is equal to zero if k ≠ l. Hence, ∑ x 2 [ n] =
∑ (X DHT [ k ]) .
N k =0
n=0
(c)
2
∑ x [ n] =
(
)
(
)
1
2 πnk ⎞ 1
2 πnk ⎞
5.66 cos⎛⎜
W − nk − WNnk . Therefore,
⎟ = W − nk + WNnk and sin⎛⎜
⎟=
⎝ N ⎠ 2 N
⎝ N ⎠ 2j N
X DHT [ k ] =
(
)
1 N −1
nk
nk
− nk
− nk
∑ x[ n] WN + WN − j WN + j WN
2 n=0
1
= X[ N − k ] + X[ k ] − j X [ N − k ] + j X[ k ] .
2
(
)
Not for sale.
133
N −1
⎛ ⎛ 2 πnk ⎞⎟ + sin⎛⎜ 2 πnk ⎞⎟ ⎞
5.67 y[ n] = x[ n] O
N g[ n]. Thus, YDHT [ k ] = ∑ y[ n] ⎜ cos⎜
⎟
⎝ N ⎠⎠
⎝ ⎝ N ⎠
n=0
N −1
N −1
2 πnk ⎞
2 πnk ⎞ ⎞
= ∑ x[r ] ∑ g[⟨ n − r ⟩ N ] ⎛⎜ cos⎛⎜
⎟ ⎟.
⎟ + sin⎛⎜
⎝ N ⎠⎠
⎝ ⎝ N ⎠
r =0
n=0
From the results of Problem 5.65 we have
N −1
2 πlk ⎞
2 πlk ⎞ ⎞
YDHT [ k ] = ∑ x[l]⎛⎜ G DHT [ k ] cos⎛⎜
⎟ + G DHT [⟨− k ⟩ N ] sin⎛⎜
⎟⎟
⎝ N ⎠
⎝ N ⎠⎠
⎝
l=0
N −1
N −1
2 πlk ⎞
2 πlk ⎞
= G DHT [ k ] ∑ x[l] cos⎛⎜
⎟ + G DHT [⟨− k ⟩ N ] ∑ x[l] sin⎛⎜
⎟
⎝ N ⎠
⎝ N ⎠
l=0
l =0
= G DHT [ k ] (X DHT [ k ] + X DHT [⟨− k ⟩ N ]) + G DHT [⟨− k ⟩ N ] (X DHT [ k ] − X DHT [⟨− k ⟩ N ])
=
1
2
1
[k]
X
2 DHT
(GDHT [k ] + GDHT [⟨− k⟩ N ]) +
1
2
1
[⟨− k ⟩ N ]
X
2 DHT
(GDHT [k ] − GDHT [⟨− k⟩ N ]) .
N −1
5.68 (a) y[ n] = ∑ (β1WN− nk + β 2WNnk ) X DCFT [ k ]
N −1
k =0
N −1
= ∑ x[ m] ∑ (α1β1WN( m − n)k + α 2 β 2WN− ( m + n)k + α1β 2WN( m + n)k + α1β 2WN− ( m − n)k )
m =0
N −1
k =0
= ∑ x[ m]N ((α1β1 + α 2 β 2 )δ[ m − n] + (α 2 β1 + α1β 2 )(δ[ m + n] + δ[ m + n − N ]))
m =0
= N [(α1β1 + α 2 β 2 ) x[ n] + (α 2 β1 + α1β 2 )(x[ n]δ[ n] + x[ N − n](1 − δ[ n])].
If we require
y[ n] = x[ n], 0 ≤ n ≤ N − 1,
then the following conditions must be satisfied:
α 2 β1 + α1β 2 = 0,
and
N (α1β1 + α 2 β 2 ) = 1.
(5-1)
(5-2)
(b) Let α12 − α 22 ≠ 0. Solving for β1 and β2 in Eqs. (5-1) and (5-2) we arrive at
α1
− α2
, β2 =
.
β1 =
N (α12 − α 22 )
N (α12 − α 22 )
Then, the inverse DCFT is given by
N −1
1
− nk
nk
x[ n] =
∑ (α1WN − α 2WN ) X DCFT [ k ], 0 ≤ n ≤ N − 1.
2
2
N (α 1 − α 2 ) k = 0
(c) If α1 = α *2 = α re + jα im with α re ≠ 0 and α im ≠ 0, the expression for
X DCFT [ k ] reduces to
Not for sale.
134
N −1
2 πnk ⎞
2 πnk ⎞ ⎞
X DCFT [ k ] = ∑ ⎛⎜ 2α re cos⎛⎜
⎟ + 2α im sin⎛⎜
⎟ ⎟x[ n]
⎝ N ⎠
⎝ N ⎠⎠
n=0 ⎝
which is real. The inverse DCFT is then given by
N −1
1
2 πnk ⎞
2 πnk ⎞ ⎞
x[ n] =
[ k ].
⎟ + 2α re sin⎛⎜
⎟ ⎟X
∑ ⎛⎜ 2α im cos⎛⎜
N
N ⎠ ⎠ DCFT
⎝
⎠
⎝
4 Nα1α 2 k = 0 ⎝
(d) It can be easily shown that the discrete Hartley transform (DHT) of Eq. (5.192) is a
1
.
special case of the real DCFT with α re = α im =
2N
1
1⎤
⎡1 1
1
1
1
1
1
−
−
⎡
⎤
⎢
5.69 (a) H 2 =
, H 4 = 1 1 − 1 − 11⎥, and
⎢⎣1 − 1⎥⎦
⎢
⎥
⎢⎣1 − 1 − 1 1 ⎥⎦
1
1
1 1
1
1 ⎤
⎡1 1
⎢1 − 1 1 − 1 1 − 1 1 − 1 ⎥
⎢1 1 − 1 − 1 1 1 − 1 − 1 ⎥
1 −1 −1 1
1 −1 −1 1 ⎥
H8 = ⎢
.
⎢1 1
1
1 − 1 − 1 − 1 − 1⎥
⎢1 − 1 1 − 1 − 1 1 − 1 1 ⎥
⎢1 1 − 1 − 1 − 1 − 1 1
1⎥
⎢⎣1 − 1 − 1 1 − 1 1
1 − 1⎥⎦
⎡H
(b) From the structure of H 2 , H 4 , and H 8 , it can be seen that H 4 = ⎢ 2
⎣H 2
H4 ⎤
⎡H
and H 8 = ⎢ 4
.
H
−
H 4 ⎥⎦
⎣ 4
H2 ⎤
,
− H 2 ⎥⎦
(c) X HT = H N x. Therefore, x = H −N1X HT = N ⋅ H TN X HT = N ⋅ H *N X HT . Hence,
N −1
x[ n] = ∑ X HT
k =0
l −1
∑ bi ( n ) bi ( k )
[ k ](−1) i =0
, where bi (r ) is the i –th bit in the binary
representation of r.
M5.1 (a) N = input('The value of N = ');
k = -N:N;
y = ones(1,2*N+1);
w = 0:2*pi/255:2*pi;
Y = freqz(y, 1, w);
Ydft = fft(y);
n = 0:1:2*N;
plot(w/pi,abs(Y),n*2/(2*N+1),abs(Ydft),'o');
xlabel('\omega/\pi'),ylabel('Amplitude');
Not for sale.
135
(b) Replace the statement k = -N:N; with k = 0:N;, y = ones(1,2*N+1);
with y = ones(1,N+1); the statement n = 0:1:2*N; with n = 0:N;, and
the statement plot(w/pi,abs(Y),n*2/(2*N+1),abs(Ydft),'o');
with plot(w/pi,abs(Y),n*2/(N+1),abs(Ydft),'o');,in the program of
Part (a).
(c) Add the statement y = y – abs(k)/N; below the statement y =
ones([1,2*N+1]); in the program of Part (a).
(d) Replace the statement y = ones(1,2*N+1); with y = N +
ones(1,2*N+1) – abs(k); in the program of Part (a).
(e) Replace the statement y = ones(1,2*N+1); with y = cos(pi*k/(2*N));
in the program of Part (a).
The plots generated for N = 4 are shown below where the circles denote the DFT
samples.
(a)
(b)
5
10
4
Amplitude
Amplitude
8
6
4
2
1
2
0
3
0
0
0.5
1
ω/ π
1.5
2
0
0.5
1
1.5
2
ω/ π
(d)
4
25
3
20
Amplitude
Amplitude
(c)
2
1
0
15
10
5
0
0.5
1
ω/π
1.5
2
0
0
0.5
1
1.5
2
ω/π
(e)
Not for sale.
136
6
Amplitude
5
4
3
2
1
0
0
0.5
1
1.5
2
ω/ π
M5.2 The code fragments to be used are as follows:
Y = fft(g).*fft(h);
y = iift(Y);
(a) y[ n] = g[ n] O
6 h[ n]. The output generated using the above code fragments is
y =
-6
9
-16
20
-4
45
5 v[ n]. The output generated using the above code fragments is
(b) w[ n] = x[ n] O
w =
Columns 1 through 3
11.0000 +25.0000i -9.0000 +48.0000i
3.0000 +17.0000i
Columns 4 through 5
29.0000 + 0.0000i -10.0000 +12.0000i
5 y[ n]. The output generated using the above code fragments is
(c) u[ n] = x[ n] O
u =
-23.0000
-69.0000
35.0000
105.0000
73.0000
M5.3 N = 8; % sequence length
gamma = 0.5;
k = 0:N-1;
x = exp(-gamma*k);
X = fft(x);
% Property 1
X1 = fft(conj(x));
G1 = conj([X(1) X(N:-1:2)]);
% Verify X1 = G1
% Property 2
x2 = conj([x(1) x(N:-1:2)]);
X2 = fft(x2);
Not for sale.
137
% Verify X2 = conj(X)
% Property 3
x3 = real(x);
X3 = fft(x3);
G3 = 0.5*(X+conj([X(1) X(N:-1:2)]));
% Verify X3 = G3
% Property 4
x4 = j*imag(x);
X4 = fft(x4);
G4 = 0.5*(X-conj([X(1) X(N:-1:2)]));
% Verify X4 = G4
% Property 5
x5 = 0.5*(x+conj([x(1) x(N:-1:2)]));
X5 = fft(x5);
% Verify X5 = real(X)
% Property 6
x6 = 0.5*(x-conj([x(1) x(N:-1:2)]));
X6 = fft(x6);
% Verify X6 = j*imag(X)
M5.4 N = 8;
k = 0:N-1;
gamma = 0.5;
x = exp(-gamma*k);
X = fft(x);
% Property 1
xpe = 0.5*(x+[x(1) x(N:-1:2)]);
xpo = 0.5*(x-[x(1) x(N:-1:2)]);
Xpe = fft(xpe);
Xpo = fft(xpo);
% Verify Xpe = real(X) and Xpo = j*imag(X)
% Property 2
X2 = [X(1) X(N:-1:2)];
% Verify X = conj(X2);
% real(X) = real(X2) and imag(X) = -imag(X2)
% abs(X)= abs(X2) and angle(X) = -angle(X2)
M5.5 N = 8; % N is length of the sequence(s)
gamma = 0.5;
k = 0:N-1;
g = exp(-gamma*k); h = cos(pi*k/N);
G = fft(g); H=fft(h);
% Property 1
Not for sale.
138
alpha=0.5; beta=0.25;
x1 = alpha*g+beta*h;
X1 = fft(x1);
% Verify X1=alpha*G+beta*H
% Property 2
n0 = N/2; % n0 is the amount of shift
x2 = [g(n0+1:N) g(1:n0)];
X2 = fft(x2);
% Verify X2(k)= exp(-j*k*n0)G(k)
% Property 3
k0 = N/2;
x3 = exp(-j*2*pi*k0*k/N).*g;
X3 = fft(x3);
G3 = [G(k0+1:N) G(1:k0)];
% Verify X3=G3
% Property 4
x4 = G;
X4 = fft(G);
G4 = N*[g(1) g(8:-1:2)]; % This forms N*(g mod(-k))
% Verify X4 = G4;
% Property 5
% To calculate circular convolution between
% g and h use eqn (3.67)
h1 = [h(1) h(N:-1:2)];
T = toeplitz(h',h1);
x5 = T*g';
X5 = fft(x5');
% Verify X5 = G.*H
% Property 6
x6 = g.*h;
X6 = fft(x6);
H1 = [H(1) H(N:-1:2)];
T = toeplitz(H.', H1); % .' is the nonconjugate transpose
G6 = (1/N)*T*G.';
% Verify G6 = X6.'
M5.6 g = input('Type in first sequence = ');
h = input('Type in second sequence = ');
x = g +i*h;
XF = fft(x);
XFconj = conj(XF);
N = length(g);
YF = zeros(N-1,1)';
for k = 1:N-1;
YF(k) = XFconj(mod(-k,N)+1);
Not for sale.
139
end
YF1 = [XFconj(1) YF];
GF = (XF + YF1)/2;
HF = (XF - YF1)/2;
M5.7 x = [-3 5 45 -15 -9 -19 -8 21 -10 23];
XF = fft(x);
k =0:9; YF = exp(-i*2*pi*k/5).*XF;
output = [XF(1) XF(6) sum(XF) sum(YF)];;
disp(output)
disp(sum(abs(XF).*abs(XF))
The output data generated by this program is
30
0
-30-0.0000i -100-0.0000i
38600
M5.8 X = [11 8-i*2 1-i*12 6+i*3 -3+i*2 2+i
k = 8:12; XF(k)=conj(X(mod(-k+2,12)));
XF = [X XF(8:12)];
x = ifft(XF);
n = 0:11; y = exp(i*2*pi*n/3).*x;
output = [x(1) x(7) sum(x) sum(y)];
disp(output)
disp(x.*x)
The output data generated by this program is
4.5000
-0.8333
11.0000
74.8333
15];
-3.0000-2.0000i
M5.9 n=0:255;
x = 0.1*n.*exp(-0.03*n);
plot(n,x);axis([0 255 0 1.3]);
xlabel('n');ylabel('Amplitude');
title('Original signal');
pause
z = [zeros(1,50) ones(1,156) zeros(1,50)];
y = 4*rand(1,256)-1;
YF = z.*fft(y);
yinv = ifft(YF);
s = x + yinv;
plot(n,s);axis([0 255 -2 4]);
xlabel('n');ylabel('Amplitude');
title('Noise corrupted signal');
pause
zc = [ones(1,50) zeros(1,156) ones(1,50)];
SF = zc.*fft(s);
xr = ifft(SF);
plot(n,xr);axis([0 255 0 1.3]);
xlabel('n');ylabel('Amplitude');
Not for sale.
140
title('Signal after Fourier-domain filtering');
Original signal
Noise corrupted signal
4
1.2
3
Amplitude
Amplitude
1
0.8
0.6
0.4
1
0
-1
0.2
0
2
0
50
100
150
200
-2
250
0
50
100
150
200
250
Signal after Fourier-domain filtering
1.2
Amplitude
1
0.8
0.6
0.4
0.2
0
M5.10
0
50
100
150
200
250
function y = overlapsave(x,h)
X = length(x);
%Length of longer sequence
M = length(h);
%length of shorter sequence
flops(0);
if (M > X)
%Error condition
disp('error');
end
%clear all
temp = ceil(log2(M)); %Find length of circular
convolution
N = 2^temp;
%zero padding the shorter sequence
if(N > M)
for i = M+1:N
h(i) = 0;
end
end
m = ceil((-N/(N-M+1)));
while (m*(N-M+1) <= X)
if(((N+m*(N-M+1)) <= X)&((m*(N-M+1)) > 0))
for n = 1:N
x1(n) = x(n+m*(N-M+1));
end
end
if(((m*(N-M+1))<=0)&((N+m*(N-M+1))>=0))
%underflow adjustment
Not for sale.
141
for n = 1:N
x1(n) = 0;
end
for n = m*(N-M+1):N+m*(N-M+1)
if(n > 0)
x1(n-m*(N-M+1)) = x(n);
end
end
end
if((N+m*(N-M+1)) > X) %overflow adjustment
for n = 1:N
x1(n) = 0;
end
for n = 1:(X-m*(N-M+1))
x1(n) =x (m*(N-M+1)+n);
end
end
w1 = circonv1(h,x1); %circular convolution using DFT
for i = 1:M-1
y1(i) = 0;
end
for i = M:N
y1(i) = w1(i);
end
for j = M:N
if((j+m*(N-M+1)) < (X+M))
if((j+m*(N-M+1)) > 0)
yO(j+m*(N-M+1)) = y1(j);
end
end
end
m = m+1;
end
%disp('Convolution using Overlap Save:');
y = real(yO);
function y = circonv1(x1,x2)
L1 = length(x1); L2 = length(x2);
if L1 ~= L2,
error('Sequences of unequal lengths'),
end
X1 = fft(x1);
X2 = fft(x2);
X_RES = X1.*X2;
y = ifft(X_RES);
The MATLAB program for performing convolution using the overlap-save method is
h = [1 1
R = 50;
1]/3;
Not for sale.
142
d = rand(1,R) - 0.5;
m = 0:1:R-1;
s = 2*m.*(0.9.^m);
x = s + d;
%x = [x x x x x x x];
y = overlapsave(x,h);
k = 0:R-1;
plot(k,x,'r-',k,y(1:R),'b--');
xlabel('Time index n');ylabel('Amplitude');
legend('r-', 's[n]','b--','y[n]');
The output plot generated by the above program is shown below:
8
s[n]
y[n]
Amplitude
6
4
2
0
0
10
20
30
Time index n
Not for sale.
40
50
143
Chapter 6
∞
∞
∞
6.1 X ( z ) = ∑ x[ n] z − n = ∑ x[ n] z − n . Therefore, lim X ( z ) = lim ∑ x[ n] z − n
n = −∞
z→∞
n=0
∞
z →∞ n=0
= lim x[0] + lim ∑ x[ n] z − n = x[0].
z→∞
z → ∞ n =1
∞
6.2
(a) Z δ{[ n]} = ∑ δ[ n] z − n = δ[0] = 1, which converges everywhere in the z –plane.
n = −∞
(b) x[ n] = α n µ[ n]. From Table 6.1,
∞
1
Z {x[ n]} = X ( z ) = ∑ x[ n]z − n =
, z > α . Let g[ n] = nx[ n]. Then,
1 − αz − 1
∞
dX ( z )
= − ∑ ng[ n]z − n −1 . Hence,
Z {g[ n]} = G( z ) = ∑ nx[ n]z − n . Now,
dz
n = −∞
n = −∞
n = −∞
∞
z
∞
dX ( z )
dX ( z )
αz − 1
= − ∑ nx[ n]z − n = −G( z ), or, G ( z ) = − z
=
, z > α.
dz
dz
n = −∞
(1 − αz −1 ) 2
r n jω o n
(e
− e − jωo n ) µ[ n]. Using the results of Example
2j
6.1 and the linearity property of the z –transform we get
⎞
⎞ 1 ⎛
1 ⎛
1
1
⎟
⎟− ⎜
Z {r n sin(ωo n) µ[ n]} = ⎜
2 j ⎜ 1− r e jωo z −1 ⎟ 2 j ⎜ 1− r e − jωo z −1 ⎟
⎠
⎠
⎝
⎝
(c) x[ n] = r n sin(ωo n) µ[ n] =
=
6.3
r
( e jω o − e − jω o ) z − 1
2j
jω o
− jω o − 1
2 −2
1 − r (e
+e
)z
+r z
=
r sin(ωo )z −1
1 − 2r cos(ωo )z
−1
2 −2
+r z
,
∀ z > r.
(a) x1[ n] = α n µ[ n − 2]. Note, x1[ n] is a right-sided sequence. Hence, the ROC of its
∞
∞
z –transform is exterior to a circle. Therefore, X1 ( z ) = ∑ α n µ[ n − 2]z − n = ∑ α n z − n
Simplifying we get X1 ( z) =
1
1 − αz
−1
− 1 − αz − 1 =
n = −∞
2 −2
α z
1 − αz − 1
n=2
whose ROC is given by
z > α.
(b) x 2 [ n] = −α n µ[ − n − 3]. Note, x2 [ n] is a left-sided sequence. Hence, the ROC of
its z –transform is interior to a circle. Therefore,
∞
−3
∞
∞
n = −∞
n = −∞
m =3
m=3
X 2 ( z) = − ∑ α n µ[ − n − 3]z − n = − ∑ α n z − n = − ∑ α − m z m = − ∑ ( z / α ) m
Not for sale.
147
Simplifying we get X 2 ( z ) =
(z / α )3
whose ROC is given by z < α .
1 − (z / α )
(c) x 3 [ n] = α n µ[ n + 4]. Note, x3[ n] is a right-sided sequence. Hence, the ROC of its
∞
∞
n = −∞
n = −4
z –transform is exterior to a circle. Therefore, X 3 ( z) = ∑ α n µ[ n + 4]z − n = ∑ α n z − n
Simplifying we get X 3 ( z ) =
(α / z )
whose ROC is given by z > α .
1 − (α / z )
−4
(d) x 4 [ n] = α n µ[ − n]. Note, x4 [ n] is a left-sided sequence. Hence, the ROC of its
∞
0
n = −∞
n = −∞
z –transform is interior to a circle. Therefore, X 4 ( z) = ∑ α n µ[ − n]z − n = ∑ α n z − n
∞
1
, z / α < 1. Therefore the ROC of X 4 ( z) is given by z < α .
1 − (z / α)
= ∑ α−mzm =
m=0
6.4
Z {(0.4) n µ[ n]} =
1
1 − 0 .4 z − 1
, z > 0.4; Z {( −0.6) n µ[ n]} =
1
1 + 0 .6 z − 1
, z > 0.6;
1
Z {(0.4) n µ[ − n − 1]} = −
, z < 0.4;
1 − 0. 4 z − 1
1
Z {( −0.6) n µ[ − n − 1]} = −
, z < 0.6;
1 + 0 .6 z − 1
(a) Z {x1[ n]} =
1
1 − 0 .4 z − 1
(b) Z {x 2 [ n]} =
(c) Z {x 3 [ n]} =
(d) Z {x 4 [ n]} =
+
1
1 − 0 .4 z − 1
1
1 − 0 .4 z − 1
1
1 − 0 .4 z − 1
1
1 + 0 .6 z − 1
+
+
+
=
1
1 + 0 .6 z − 1
1
1 + 0 .6 z − 1
1
1 + 0 .6 z − 1
1 + 0 .2 z − 1
(1 − 0.4 z −1 )(1 + 0.6 z −1 )
=
=
=
, z > 0 .6 .
1 + 0 .2 z − 1
(1 − 0.4 z −1 )(1 + 0.6 z −1 )
1 + 0 .2 z − 1
(1 − 0.4 z −1 )(1 + 0.6 z −1 )
, 0 .4 < z < 0 .6 .
, z < 0.4.
1 + 0 .2 z − 1
(1 − 0.4 z −1 )(1 + 0.6 z −1 )
. Since the ROC of
the first term is z < 0.4 and that of the second term is z > 0.6 . Hence, the z –
transform of x 4 [ n] does not converge.
6.5
(a) The ROC of Z {x1[ n]} is z > 0.3, the ROC of Z {x 2 [ n]} is z > 0.7, the ROC of
Z {x 3 [ n]} is z > 0.4, and the ROC of Z {x 4 [ n]} is z < 0.4.
(b) (i) The ROC of Z {y1[ n]} is z > 0.7,
(ii) The ROC of Z {y2 [ n]} is z > 0.4,
Not for sale.
148
(iii) The ROC of Z {y3 [ n]} is 0.3 < z < 0.4,
(iv) The ROC of Z {y 4 [ n]} is z > 0.7,
(v) The ROC of Z {x 2 [ n]} is z > 0.7, whereas, the ROC of Z {x 4 [ n]} is z < 0.4.
Hence, the z -transform of y5 [ n] does not converge.
(vi) The ROC of Z {x 3 [ n]} is z > 0.4, whereas, the ROC of Z {x 4 [ n]} is z < 0.4.
Hence, the z -transform of y6 [ n] does not converge.
6.6
v[ n] = α
n
= α n µ[ n] + α − n µ[ − n − 1]. Now, Z {α n µ[ n]} =
1
1 − αz − 1
−1
∞
∞
n = −∞
m =1
m=0
, z > α . (See Table
6.1) and Z {α − n µ[ − n − 1]} = ∑ α − n z − n = ∑ α m z m = ∑ α m z m − 1 =
1
−1
1 − αz
αz
1
α
(1 − α 2 )z −1
, αz < 1. Therefore, {v[ n]} = V ( z ) =
+
=
1 − αz
1 − αz −1 z −1 − α (1 − αz −1 )( z −1 − α )
with its ROC given by α < z < 1 / α .
=
6.7
(a) x1[ n] = α n µ[ n + 2] + β n µ[ n + 2] with β > α . Note that x1[ n] is a right-sided
sequence. Hence, the ROC of its z –transform is exterior to a circle. Now,
∞
∞
n = −2
n=0
Z {α n µ[ n + 2]} = ∑ α n z − n = ∑ α n z − n + (α / z) −1 + (α / z) − 2
=
1
(α / z ) −2
with its ROC given by z > α . Likewise,
+ ( α / z ) − 1 + (α / z ) − 2 =
1 − (α / z )
1 − (α / z )
Z {β n µ[ n + 2]} =
( β / z ) −2
with its ROC given by z > β . Hence,
1 − ( β / z)
Z {x1[ n]} = X1 ( z ) =
=
(α / z ) − 2 ( β / z ) − 2
+
1 − (α / z ) 1 − ( β / z )
(α −2 + β −2 ) − (αβ −2 + α −2 β )z −1
z − 2 (1 − αz −1 )(1 − βz −1 )
with its ROC given by z > β .
(b) x 2 [ n] = α n µ[ − n − 2] + β n µ[ n − 1] with β > α . Note that x2 [ n] is a two-sided
sequence. Now,
−2
∞
∞
n = −∞
m=2
m=0
Z {α n µ[ − n − 2]} = ∑ α n z − n = ∑ α − m z m = ∑ ( z / α ) m − 1 − ( z / α ) − ( z / α ) 2
=
(z / α)3
with its ROC given by z < α . Likewise,
1 − (z / α)
Not for sale.
149
∞
∞
1
n =1
n=0
1 − βz − 1
Z {β n µ[ n − 1]} = ∑ β n z − n = ∑ β n z − n − 1 =
−1 =
βz − 1
1 − βz − 1
with its ROC
given by z > β . Since the two ROCs do not intersect, Z {x 2 [ n]} does not converge.
(c) x 3 [ n] = α n µ[ n + 1] + β n µ[ − n − 2] with β > α . Note that x3[ n] is a two-sided
sequence. Now,
Z {β n µ[− n − 2]} =
=
−2
∞
∞
n = −∞
m=2
m=0
∑ β n z − n = ∑ β − m z m = ∑ ( z / β )m − 1 − ( z / β ) − ( z / β )2
(z / β )
with its ROC given by z < β . Likewise,
1− (z / β )
3
∞
∞
n =1
n =0
Z {α n µ[n − 1]} = ∑ α n z − n = ∑ α n z − n − 1 =
1
1 − αz −1
−1 =
αz −1
with its ROC given by
1 − αz −1
z > α.
6.8
The denominator factor ( z 2 + 0.3z − 0.18) = ( z + 0.6)( z − 0.3) has poles at z = −0.6 and
at z = 0.3, and the factor ( z 2 − 2 z + 4) has poles with a magnitude 2. Hence, the four
ROCs are defined by the regions: R 1 : 0 < z < 0.3, R 2 : 0.3 < z < 0.6,
R 3 = 0.6 < z < 2, and R 4 : z > 2. The inverse z –transform associated with the ROC
R 1 is a left-sided sequence, the inverse z –transforms associated with the ROCs
R 2 and R 3 are two-sided sequences, and the inverse z –transform associated with the
ROC R 4 is a right-sided sequence.
6.9
X (z ) = Z {x[ n]} with an ROC given by R x . Using the conjugation property of the –
transform given in Table 6.2, we observe that Z {x * [ n]} = X * ( z*) whose ROC is
1
2
given by R x . Now, Re{x[ n]} = ( x[ n] + x * [ n]). Hence, Z {Re x[ n]}
=
1
2
(X ( z) + X * ( z)) whose ROC is also R x .
Thus, Z {Im x[ n]} =
6.10
1
2j
Likewise, Im{x[ n]} =
1
( x[ n] −
2j
x * [ n]).
(X (z) − X * (z)) whose ROC is again R x .
{x[ n]} = {2, 3, − 1, 0, − 4, 3, 1, 2, 4}, − 2 ≤ n ≤ 6. Then,
~
~
X[ k ] = X ( z) z = e jπk / 3 = X ( z) z = e j 2πk / 6 = X (e jω )
. Note that X [ k ] is a
ω = 2πk / 6
periodic sequence with a period 6. Hence, from Eq. (5.49), the inverse of the discrete
∞
t
~
Fourier series X [ k ] is given by x[ n] = ∑ x[ n + 6r ] = x[ n − 6] + x[ n] + x[ n + 6] for
r = −∞
0 ≤ n ≤ 5. Let y[ n] = x[ n − 6] + x[ n] + x[ n + 6], − 2 ≤ n ≤ 6. Now,
Not for sale.
150
{x[ n − 6]} = {0, 0, 0, 0, 0, 0, 2, 3, − 1} and
{x[ n + 6] = {1, 2, 4, 0, 0, 0, 0, 0, 0}. Therefore,
{y[ n]} = {3, 5, 3, 0, − 4, 3, 3, 5, 3}, − 2 ≤ n ≤ 6. Hence,
{~
x[ n]} = {3, 0, − 4, 3, 3, 5}, 0 ≤ n ≤ 5.
6.11
{x[ n]} = {4, 2, − 1, 5, − 3, 1, − 2, 4, 2}, − 6 ≤ n ≤ 2. Then,
~
~
X[ k ] = X ( z) z = e jπk / 3 = X ( z) z = e j 2πk / 6 = X (e jω )
. Note that X [ k ] is a
ω = 2πk / 6
periodic sequence with a period 6. Hence, from Eq. (5.49), the inverse of the discrete
∞
t
~
Fourier series X [ k ] is given by x[ n] = ∑ x[ n + 6r ] = x[ n − 6] + x[ n] + x[ n + 6] for
r = −∞
0 ≤ n ≤ 5. Let y[ n] = x[ n − 6] + x[ n] + x[ n + 6], − 6 ≤ n ≤ 5. Now,
{x[ n − 6]} = {0, 0, 0, 0, 0, 0, 4, 2, − 1, 5, − 3, 1}, − 6 ≤ n ≤ 5,
{x[ n + 6] = {− 2, 4, 2, 0, 0, 0, 0, 0, 0, 0, 0, 0}, − 6 ≤ n ≤ 5.
Therefore, {y[ n]} = {2, 6, 1, 5, − 3, 1, 2, 6, 5, − 3, 1}, − 6 ≤ n ≤ 5.
x[ n]} = {2, 6, 1, 5, − 3, 1}, 0 ≤ n ≤ 5.
Hence, {~
11
6.12
11
X ( z ) = ∑ x[ n] z − n . X 0 [ k ] = X ( z) z = e (2πk / 9 = ∑ x[ n] e − j 2πkn / 9 , 0 ≤ k ≤ 8.
n=0
Therefore, x 0 [ n] =
=
1 8
j 2πkn / 9
∑ X [k ] e
9 k =0 0
1 8 11
j 2 πk ( n − r ) / 9
∑ ∑ x[r ] e
9 k =0 r =0
From Eq. (5.11),
=
=
n=0
1 8 ⎛ 11
− j 2 πkr / 9 ⎞⎟ j 2 πkn / 9
∑ ⎜⎜ ∑ x[r ] e
⎟e
9 k =0 r =0
⎝
9
1 11
j 2 πk ( n − r ) / 9
∑ x[r ] ∑ e
9 r =0
k =0
1 8
− (r − n ) k
∑ W9
9 k −0
⎠
=
9
1 11
− (r − n ) k
.
∑ x[r ] ∑ W9
9 r =0
k =0
⎧1, for r − n = 9i,
Hence,
=⎨
otherwise.
⎩0,
⎧ x[0] + x[9], for n = 0
i.e.,
x 0 [ n] = ⎨
otherwise,
⎩ x[ n],
{x 0 [ n]} = {20 5 45 − 15 − 9 − 19 − 8 21 − 10}, 0 ≤ n ≤ 8.
6.13
∞
∞
∞
n = −∞
n = −∞
r = −∞
(a) X ( z) = ∑ x[ n] z − n . Hence, X ( z 3 ) = ∑ x[ n] z − 3n = ∑ x[ m / 3] z − m . Define
m =3r
⎧ x[ m / 3], m = 0, ± 3, ± 6,K,
a new sequence g[ m] = ⎨
We can then express
otherwise.
⎩ 0,
Not for sale.
151
∞
X ( z 3 ) = ∑ g[ n] z − n . Thus, the inverse z –transform of X ( z 3 ) is given by g[n].
n = −∞
⎧⎪(−0.5) n / 3 , n = 0, 3, 6,K,
For x[ n] = (−0.5) n µ[ n], g[ n] = ⎨
⎪⎩
0,
otherwise.
(b) Y ( z) = (1 + z −1 ) X ( z 3 ) = X ( z 3 ) + z −1 X ( z 3 ). Therefore,
y[n] = Z −1{Y ( z)} = Z −1 X ( z 3 ) + Z −1 z −1 X ( z 3 ) = g[ n] + g[ n − 1], where g[n] =
⎧⎪(−0.5) n / 3 , n = 0, 3, 6,K,
Hence,
Z −1 X ( z 3 ) . From Part (a), g[ n] = ⎨
⎪⎩
0,
otherwise.
⎪⎧(−0.5) ( n −1) / 3 , n = 1, 4, 7,K,
Therefore,
g[ n − 1] = ⎨
⎪⎩
0,
otherwise.
⎧ (−0.5) n / 3 ,
n = 0, 3, 6,K,
⎪⎪
y[ n] = ⎨(−0.5) ( n −1) / 3 , n = 1, 4, 7,K,
⎪
0,
otherwise.
⎪⎩
6.14
(a) X a (z) = Z {µ[ n] − µ[ n − 5]} =
1
1 − z −1
−
z −5
1 − z −1
=
1 − z −5
1 − z −1
= 1 + z −1 + z −2 + z −3 + z −4 . Since has all poles at the origin, the ROC is the entire
z –plane except the point z = 0 , and hence includes the unit circle. On the unit circle,
X a ( z ) z = e j ω = X a ( e j ω ) = 1 + e − j ω + e − j 2 ω + e − j 3ω + e − j 4 ω =
1 − e − j 5ω
1 − e − jω
.
(b) x b [ n] = α n µ[ n] − α n µ[ n − 8], α < 1. From Table 6.1,
z −8
1
X b (z) =
1 − z −8
. The ROC is exterior to the circle at
−
=
1 − αz − 1 1 − α z − 1 1 − αz − 1
z = α < 1. Hence, the ROC includes the unit circle. On the unit circle,
X b ( z) z = e jω = X b (e jω ) =
1 − e j 8ω
1 − α e jω
.
(c) x c [ n] = (n + 1)α n µ[ n] = nα n µ[ n] + α n µ[ n], α < 1. From Table 6.1,
X c ( z) =
αz − 1
1
1 + αz − 1
. The ROC is exterior to the circle at
+
=
1 − αz − 1 1 − αz − 1 1 − α z − 1
z = α < 1. Hence, the ROC includes the unit circle. On the unit circle,
X c (e jω ) =
1 + αe jω
1− e
jω
.
Not for sale.
152
N
⎞ 1 − z −(2 N +1)
⎛ 2N
(a) Y 1( z ) = ∑ z − n = z N ⎜⎜ ∑ z − n ⎟⎟ =
. Y1 ( z) has N poles at
n=−N
⎠ z − N (1 − z −1 )
⎝ n=0
z = 0 and N poles at z = ∞. Hence, the ROC is the entire z –plane excluding the
points z = 0 and z = ∞, and includes the unit circle. On the unit circle,
6.15
Y1 ( z) z = e jω
1
sin⎛⎜ ω( N + ) ⎞⎟
2 ⎠
⎝
.
= Y1 (e jω ) =
=
sin(ω / 2)
e − jNω (1 − e − jω )
1 − e j (2 N + 1)ω
N
(b) Y 2( z) = ∑ z − n =
1 − z −( N + 1)
. Y 2( z) has N poles at z = 0. Hence, the ROC
1 − z −1
is the entire z –plane excluding the point z = 0. On the unit circle,
N +1 ⎞
ω⎟
sin⎛⎜
j ( N + 1)ω
1− e
2
⎝
⎠.
jω
− Nω / 2
Y2 ( z ) z = e jω = Y2 (e ) =
=e
− jω
sin(ω / 2)
1− e
n
⎧⎪
(c) y3 [ n] = ⎨1 − N , − N ≤ n ≤ N , Now, y3 [ n] = y0 [ n] O
* y 0 [ n] where
⎪⎩ 0,
otherwise.
⎧⎪1, − N ≤ n ≤ N ,
(1 − z −( N + 1) ) 2
2
y 0 [ n] = ⎨
.
2
2 Therefore, Y3 ( z ) = Y0 ( z ) =
⎪⎩0,
z − N (1 − z −1 ) 2
otherwise.
n=0
Y3 ( z ) has
N
N
poles at z = 0 and
poles at z = ∞. Hence, the ROC is the entire z –
2
2
plane excluding the points z = 0 and z = ∞, and includes the unit circle. On the unit
N +1 ⎞ ⎞
sin 2 ⎛⎜ ω⎛⎜
⎟⎟
⎝ ⎝ 2 ⎠⎠ .
circle, Y3 (e jω ) = Y02 (e jω ) =
sin 2 (ω / 2)
⎧N + 1 − n , − N ≤ n ≤ N ,
= y1 [ n] + N ⋅ y 3 [ n], where y1[ n] is the
(d) y 4 [ n] = ⎨
0,
otherwise,
⎩
sequence of Part (a) and y 3 [ n] is the sequence of Part (c). Therefore,
Y4 ( z ) = Y1 ( z ) + N ⋅ Y3 ( z ) =
1 − z −(2 N + 1)
+N
(1 − z −( N +1) )2
. Since the ROCs of
z − N (1 − z −1 )2
z − N (1 − z −1 )
both Y1( z) and Y3 ( z ) include the unit circle, the ROC of Y4 ( z) also includes the unit
N +1 ⎞ ⎞
1
⎟⎟
sin⎛⎜ ω( N + ) ⎞⎟ sin 2 ⎛⎜ ω⎛⎜
2 ⎠
⎝ 2 ⎠⎠
⎝
⎝
jω
+
.
circle. On the unit circle, Y4 (e ) =
sin(ω / 2)
sin 2 (ω / 2)
⎧cos(πn / 2 N ), − N ≤ n ≤ N ,
Therefore,
(e) y f [ n] = ⎨
0,
otherwise.
⎩
Not for sale.
153
1 N − j (πn / 2 N ) − n 1 N j (πn / 2 N ) − n
z +
z
∑e
∑e
2 n=−N
2 n=−N
e j (π / 2) z N ⎛⎜ 1 − e − j (2 N + 1)(π / 2 N ) z − (2 N + 1) ⎞⎟
=
⎜
⎟
2
1 − e − j (π / 2 N ) z −1
⎝
⎠
e − j (π / 2) z N ⎛⎜ 1 − e j (2 N +1)(π / 2 N ) z − (2 N +1) ⎞⎟
+
.
j (π / 2 N ) −1
⎜
⎟
2
e
z
−
1
⎝
⎠
Y f (z) has N poles at z = 0 and N poles at z = ∞. Hence, the ROC is the entire z –
Y f ( z) =
plane excluding the points z = 0 and z = ∞, and includes the unit circle. On the unit
π ⎞⎛
π ⎞⎛
1 ⎞
1 ⎞
sin⎛⎜ ⎛⎜ ω −
sin⎛⎜ ⎛⎜ ω +
⎟⎜ N + ⎞⎟ ⎟
⎟⎜ N + ⎞⎟ ⎟
2
N
2
2
N
2 ⎠⎠
1
1
⎝
⎠
⎝
⎝
⎠
⎝
⎠
⎝
⎠+
⎝
circle, Y f (e jω ) =
.
π ⎞ ⎞
π ⎞ ⎞
2
2
⎛
⎛
⎛
⎛
sin⎜ ⎜ ω −
sin⎜ ⎜ ω +
⎟ / 2⎟
⎟ / 2⎟
2N ⎠ ⎠
2N ⎠ ⎠
⎝⎝
⎝⎝
6.16
X ( z ) = −4 z 3 + 5 z 2 + z − 2 − 3 z − 1 + 2 z −3 , Y ( z ) = 6 z − 3 − z − 1 + 8 z − 3 + 7 z −4 − 2 z − 5 ,
W ( z ) = 3 z − 2 + 2 z − 3 + 2 z − 4 − z −5 − 2 z − 7 + 5 z −8 .
(a) U ( z ) = X ( z )Y ( z )
= (−4 z 3 + 5z 2 + z − 2 − 3z −1 + 2 z −3 )(6 z − 3 − z −1 + 8 z −3 + 7z −4 − 2 z −5 )
= −24 z 4 + 42 z 3 − 5z 2 − 20 z − 45 + 23z −1 + 66 z −2 − 25z −3 − 42 z −4 − 17 z −5
+ 22 z −6 + 14 z −7 − 4 z −8 . Hence,
{u[ n]} = {− 24, 42, − 5, − 20, − 45, 23, 66, − 25, − 42, − 17, 22, 14, − 4}, − 4 ≤ n ≤ 8.
(b) V ( z ) = X ( z )W ( z )
= (−4 z 3 + 5z 2 + z − 2 − 3z −1 + 2 z −3 )(3z −2 + 2 z −3 + 2 z −4 − z −5 − 2 z −7 + 5z −8 )
= −12 z + 7 + 5z −1 + 10 z −2 − 16 z −3 − 3z −4 − 28 z −5 + 30 z −6 + 13z −7 − 6 z −8
− 15 z −4 − 4 z −10 + 10 z −11 . Hence,
{v[ n]} = {− 12, 7, 5, 10, − 16, − 3, − 28, 30, 13, − 6, − 15, − 4, 10}, − 1 ≤ n ≤ 11.
(c) G ( z ) = W ( z )Y ( z )
= (3z −2 + 2 z −3 + 2 z −4 − z −5 − 2 z −7 + 5z −8 )(6 z − 3 − z −1 + 8 z −3 + 7z −4 − 2 z −5 )
= 18 z −1 + 3z −2 + 3z −3 − 14 z −4 + 25z −5 + 26 z −6 + 60 z −7 − 11z −8 − 16 z −9 − 14 z −10
+ 26 z −11 + 39 z −12 − 10 z −13 . Hence,
{g[ n]} = {18, 3, 3, − 14, 25, 26, 60, − 11, − 16, − 14, 26, 39, − 10}, 1 ≤ n ≤ 13.
6.17
2 N − 1 ⎛ N −1
N −1⎛ N −1
⎞
⎞
YL ( z) = ∑ ⎜⎜ ∑ x[ m]h[ n − m] ⎟⎟ z − n and YC ( z) = ∑ ⎜⎜ ∑ x[ m]h[⟨ n − m⟩ N ]⎟⎟ z − n .
n=0 ⎝ m =0
n=0 ⎝ m=0
⎠
⎠
Not for sale.
154
Now, YL (z) can be rewritten as
N −1⎛ N −1
2 N −1⎛ N −1
⎞
⎞
YL ( z ) = ∑ ⎜⎜ ∑ x[ m]h[ n − m] ⎟⎟z − n + ∑ ⎜⎜ ∑ x[ m]h[ n − m] ⎟⎟z − n
n=0 ⎝ m =0
n= N ⎝ m =0
⎠
⎠
N −1⎛ N −1
N −1⎛ N −1
⎞
⎞
= ∑ ⎜⎜ ∑ x[ m]h[ n − m] ⎟⎟z − n + ∑ ⎜⎜ ∑ x[ m]h[ k − m − N ] ⎟⎟z − ( k − N ) . Therefore,
n=0 ⎝ m =0
k =0 ⎝ m=0
⎠
⎠
N −1⎛ N −1
N −1⎛ N −1
⎞
⎞
⟨YL ( z)⟩ − N
= ∑ ⎜⎜ ∑ x[ m]h[ n − m] ⎟⎟z − n + ∑ ⎜⎜ ∑ x[ m]h[⟨ k − m⟩ N ] ⎟⎟z − k
(z
−1)
n=0 ⎝ m =0
k =0 ⎝ m=0
⎠
⎠
N −1⎛ N −1
⎞
= ∑ ⎜⎜ ∑ x[ m]h[⟨ n − m⟩ N ] ⎟⎟z − n = YC ( z ).
n=0 ⎝ m=0
⎠
6.18
G( z) = 2 − z −1 + 3z −2 , H ( z) = −2 + 4 z −1 + 2 z −2 − z −3 . Now,
Y L ( z) = G( z)H ( z) = (2 − z −1 + 3z −2 )(−2 + 4 z −1 + 2 z −2 − z −3 )
= −4 + 10 z −1 − 6 z −2 + 8 z −3 + 7 z −4 − 3z −5 . Therefore,
y L [ n] = {− 4 6 2 12 5 − 3}, 0 ≤ n ≤ 5.
Using the MATLAB statement y = conv([2 -1 3], [-2 4 2 -1]); we
obtain
y =
-4
10
-6
8
7
-3
which is seen to be the same result as given above.
YC ( z) = ⟨YC ( z)⟩
= ⟨−4 + 10 z −1 − 6 z −2 + 8z −3 + 7z −4 − 3z −5 ⟩
( z − 4 −1)
−2
−3
( z − 4 −1)
= −4 + 10 z −1 − 6 z + 8 z + 7 − 3z −1 = 3 + 7 z −1 − 6 z −2 + 8 z −3 . Therefore,
yC [ n] = {1 3 2 12}, 0 ≤ n ≤ 3.
Using the MATLAB statement y = circonv([2 -1 3 0],[-2 4 2 -1]);
we obtain
y =
3
7
-6
8
which is seen to be the same result as given above.
6.19
G( z) =
ρl =
P( z)
P( z)
=
. The residue ρl of G ( z ) at the pole is given by
D( z ) (1 − λl z −1 ) R( z )
P( z)
. Now,
R( z ) z = λ
l
D' ( z ) =
dD( z)
dz
−1
=
d[(1 − λ l z −1 ) R( z)]
dz
−1
= − λl R( z ) + (1 − λl z −1 )
D' ( z) z = λl = − λl R( z) z = λ . Therefore, ρl = − λl
l
Not for sale.
dR( z )
dz −1
. Hence,
P( z)
.
D' ( z ) z = λ
l
155
ρ1
ρ2
3z
3z −1
=
=
+
,
( z + 0.6)( z − 0.3) (1 + 0.6 z −1 )(1 − 0.3z −1 ) 1 + 0.6 z −1 1 − 0.3z −1
3
3
10
3
3
10
where ρ1 =
=
= − , ρ2 =
=
= .
z − 0 . 3 z = − 0. 6 − 0 . 9
z + 0.6 z = 0.3 0.9 3
3
6.20 (a) X a ( z ) =
10 / 3
Therefore, X a ( z ) = −
10 / 3
+
.
1 + 0 .6 z − 1 1 − 0 .3 z − 1
There are three ROCs - R 1 : z < 0.3, R 2 : 0.3 < z < 0.6, R 3 : z > 0.6.
The inverse z –transform associated with the ROC R1 is a left-sided sequence:
Z −1{X a ( z)} = x a [ n] =
10 ⎛
n
⎜ ( −0.6)
3 ⎝
− (0.3) n ⎞⎟µ[ −n − 1].
⎠
The inverse z –transform associated with the ROC R 2 is a two-sided sequence:
Z −1{X a ( z)} = x a [ n] = − (−0.6) n µ[ −n − 1] + (0.3) n µ[ n].
3
3
The inverse z –transform associated with the ROC R 3 is a right-sided sequence:
10
10
(
)
Z −1{X a ( z)} = x a [ n] =
− (−0.6) n + (0.3) n µ[ n].
3
10
(b) X b ( z ) =
3z −1 + 0.1z −2 + 0.87 z −3
(1 + 0.6 z
−1
K = X b (0) = 0, ρ1 =
γ2 =
γ1 =
)(1 − 0.3z
−1 2
=K+
)
(1 − 0.3z −1 ) 2
1 + 0.6 z −1
1 + 0.6 z −1
−
+
γ1
1 − 0 .3 z
−1
+
γ2
(1 − 0.3z −1 ) 2
= 2.7279,
z = −0.6
= 0.6190,
z = 0.3
−2
1
d ⎛⎜ 3z −1 + 0.1z + 0.87 z − 3 ⎞⎟
⋅
⎟
− 0.3 dz −1 ⎜⎝
1 + 0 .6 z − 1
⎠
X b ( z) =
1 + 0 .6 z
−1
3z −1 + 0.1z − 2 + 0.87z − 3
3z −1 + 0.1z − 2 + 0.87z − 3
2.7279
ρ1
0.3469
1 − 0.3z −1
+
= −0.3469. Hence,
z = 0. 3
0.6190
(1 − 0.3z −1 ) 2
.
There are three ROCs - R 1 : z < 0.3, R 2 : 0.3 < z < 0.6, R 3 : z > 0.6.
The inverse z –transform associated with the ROC R1 is a left-sided sequence:
Z −1{ X b ( z )} = xb [n] = 2.7279(−0.6) n µ[−n − 1]
+ (− 0.3469 + 0.6190(n + 1))(0.3)n µ[ −n − 1].
The inverse z –transform associated with the ROC R 2 is a two-sided sequence:
Z −1{ X b ( z )} = xb [ n] = 2.7279( −0.6) n µ[ − n − 1]
+ (− 0.3469 + 0.6190(n + 1))(0.3) n µ[ n].
The inverse z –transform associated with the ROC R 3 is a right-sided sequence:
Not for sale.
156
.
Z −1{X b ( z )} = x b [ n] = 2.7279(−0.6) n µ[ n] + (− 0.3469 + 0.6190( n + 1))(0.3) n µ[ n].
G( z ) =
6.21
P (∞ )
P( z ) p0 + p1 z −1 + L + p M z − M
. Thus, G(∞ ) =
. Now, a partial=
−
1
−
N
D(∞ )
D( z )
1 + d1 z + L + d N z
ρl
N
fraction expansion of G ( z ) in z −1 is given by G( z) = ∑
l =1 1 − λl z
−1
, from which we obtain
N
p
G (∞ ) = ∑ ρ l = 0 .
d0
l =1
1
6.22 H ( z ) =
, z > r > 0. By using partial-fraction expansion we write
1 − 2r cos θz −1 + r 2 z − 2
⎞
⎛
⎞
e jθ
e − jθ
e jθ
e − jθ
1
1 ⎛⎜
⎟.
⎜
⎟
=
−
H (z) =
−
jθ
jθ ⎜
jθ −1
− jθ −1 ⎟ 2 sin θ ⎜
jθ − 1
− jθ − 1 ⎟
1 − re
z ⎠
z ⎠
(e − e − j ) ⎝ 1 − re z
1 − re
⎝ 1 − re z
1
r n ⎛⎜ e jθ ( n + 1) − e − jθ ( n + 1) ⎞⎟
Thus, h[ n] =
r n e jθ e jnθ µ[ n] − r n e − jθ e − jnθ µ[ n] =
µ[ n]
⎟
j 2 sin θ
sin θ ⎜⎝
2j
⎠
(
=
)
r n sin ((n + 1)θ )
µ[ n].
sin θ
∞
−1
∞
∞
∞
n = −∞
n = −∞
m =1
m =1
m =0
6.23 (a) X ( z ) = ∑ α n µ[ −n − 1]z − n = ∑ α n z − n = ∑ α − m z m = ∑ ( z / α) m = ∑ ( z / α) m − 1
=
1
z/α
=
, z < α.
1 − ( z / α ) 1 − αz −1
(b) Using the differentiation property, we obtain from Part (a),
Z{nx[ n]} = − z
=
α z −1
(1 − αz
−1 2
dX ( z )
α z −1
=
, z < α . Therefore, Z {y[ n]} = Z{nx[ n] + x[ n]}
dz
(1 − αz −1 ) 2
+
)
1
1 − αz
−1
=
1
(1 − αz −1 ) 2
, z < α.
∞
6.24 (a) Expanding X1 ( z) in a power series we get X1 ( z) = ∑ z − 3n , z > 1. Thus,
n=0
⎧1, if n = 3k and n ≥ 0,
x1[ n] = ⎨
Alternately, using partial-fraction expansion we get
otherwise.
⎩0,
X1 ( z ) =
1
1 − z −3
=
1
3
1 − z −1
+
1
3
1
1+ (
2
+j
3 −1
)z
2
Not for sale.
+
1
3
1
1+ ( −
2
j
3 −1
)z
2
. Therefore,
157
1
1
1
x1[ n] = µ[ n] + ⎛⎜ − − j
3
3⎝ 2
=
1
3
3⎞
1⎛ 1
⎟ µ[ n] + 3 ⎜ − 2 +
2 ⎠
⎝
µ[ n] + e − j 2πn / 3 µ[ n] + e j 2 πn / 3 µ[ n] =
1
3
1
3
3⎞
⎟ µ[ n]
2 ⎠
j
1
3
2
3
µ[ n] + cos(2πn / 3) µ[ n]. Thus,
⎧1, if n = 3k and n ≥ 0,
x1[ n] = ⎨
otherwise.
⎩0,
∞
(b) Expanding X 2 ( z) in a power series we get X 2 ( z ) = ∑ z − 4 n , z > 1. Thus,
n=0
⎧1, if n = 4k and n ≥ 0,
Alternately, using partial-fraction expansion we get
x 2 [ n] = ⎨
otherwise.
⎩0,
X 2 (z) =
x 2 [ n] =
1
4
1 − z −1
1
4
+
1
4
1 + z −1
+
1
4
1
2
1+ ( + j
3 −1
)z
2
1
1
1
µ[ n] + (−1) n µ[ n] + ⎛⎜ − − j
4
4⎝ 2
+
1
4
1+ (
1
−
2
j
3 −1
)z
2
3⎞
1
1
µ[ n] + ⎛⎜ − +
⎟
2 ⎠
4⎝ 2
j
. Thus,
3⎞
⎟ µ[ n]
2 ⎠
=
1
4
µ[ n] + ( −1) n µ[ n] + e − j 2 πn / 3 µ[ n] + e j 2 πn / 3 µ[ n]
=
1
4
⎧1, if n = 4k and n ≥ 0,
1
1
µ[ n] + ( −1) n µ[ n] + cos(2πn / 3) µ[ n]. Thus, x 2 [ n] = ⎨
4
2
otherwise.
⎩0,
1
4
1
4
1
4
6.25 (a) X1 ( z) = log(1 − αz −1 ), z > α . Expanding X1( z) in a power series we get
X 1 ( z ) = − αz
−1
∞ αn
α 2 z − 2 α 3 z −3
−
−
−K = − ∑
z − n . Therefore,
2
3
n =1 n
αn
µ[ n − 1].
n
⎛ α − z −1 ⎞
⎟ = log 1 − (αz ) −1 , z < α . Expanding X 2 ( z) in a power series
(b) X 2 ( z) = log⎜
⎜ α ⎟
⎝
⎠
x1[ n] = −
(
we get X 2 ( z ) = −(α z ) −1 −
)
∞ (α z ) − n
( αz ) − 2 ( αz ) − 3
−
−K = − ∑
. Therefore,
2
3
n
n =1
α −n
µ[ n − 1].
n
⎛
⎞
1
⎟, z > α . Expanding X 3 ( z ) in a power series we get
(c) X 3 ( z ) = log⎜⎜
−1 ⎟
⎝ 1 − αz ⎠
x 2 [ n] = −
X 3 ( z ) = αz − 1 +
∞ αn
α 2 z −2 α 3 z −3
αn
+
K= ∑
z − n . Therefore, x3 [ n] =
µ[ n − 1].
2
3
n
n =1 n
Not for sale.
158
(
)
⎛ α ⎞
⎟ = − log 1 − (αz) −1 , z < α . Expanding X 4 ( z) in a power
(d) X 4 ( z) = log⎜⎜
−1 ⎟
⎝α−z ⎠
series we get X 4 ( z) = (α z ) −1 +
x 4 [ n] =
6.26 H ( z ) =
α −n
µ[ n − 1].
n
z − 1 + 1 .7 z − 2
(1 − 0.3z −1 )(1 + 0.5z −1 )
∞ (α z ) − n
( α z ) − 2 ( αz ) − 3
. Therefore,
+
−K = ∑
2
3
n
n =1
=k+
ρ1
1 − 0 .3 z − 1
+
ρ2
1 + 0 .5 z − 1
, where k = H (0) = −
34
,
3
z −1 + 1.7z − 2
25
, ρ2 =
= 3.
1 − 0.3z −1 z = −0.5
1 + 0.5z −1 z = 0.3 3
The statement [r,p,k]=residuez([0 1 1.7],conv([1 -0.3],[1 0.6]);
yields
r =
3.0000
8.3333
ρ1 =
z −1 + 1.7z − 2
=
p =
-0.5000
0.3000
k =
-11.3333
34
25 / 3
3
. Hence, its inverse z –transform is given by
+
+
3 1 − 0 .3 z − 1 1 + 0 .5 z − 1
34
25
h[ n] = − δ[ n] + (0.3) n µ[ n] + 3(−0.5) n µ[ n].
3
3
Thus, H ( z ) = −
∞
∞
n = −∞
n = −∞
6.27 G( z ) = Z{g[ n] = ∑ g[ n]z − n with a ROC given by R g and H ( z ) = Z{h[ n] = ∑ h[ n]z − n
with a ROC given by R h .
∞
∞
n = −∞
n = −∞
(a) G * ( z ) = ∑ g * [ n]( z*) − n and G * ( z*) = ∑ g * [ n]z − n . Therefore,
Z{g * [ n]} = G * ( z*) with a ROC given by R g .
(b) Replace n by − m in the sum defining G ( z ). Then
∞
∑ g[ − m]z
m = −∞
m
=
∞
∑ g[ − m](1 / z)
m = −∞
−m
= G(1 / z). Thus, Z{g[ − n]} = G (1 / z ). Since z has
been replaced by 1 / z, the ROC of is given by 1 / R g .
Not for sale.
159
(c) Let y[ n] = αg[ n] + βh[ n]. Then
Y ( z ) = Z{αg[ n] + βh[ n] = αZ{g[ n] + βZ{h[ n] = αG ( z ) + βH ( z ). In this case Y ( z ) will
converge wherever both G ( z ) and H ( z ) converge. Hence the ROC of Y ( z ) is
R g ∩ Rh .
(d) y[ n] = g[ n − no ]. Hence,
∞
∞
Y ( z ) = ∑ y[ n]z − n = ∑ g[ n − n 0 ]z − n =
=z
n = −∞
− no ∞
∑ g[ n]z
n = −∞
−m
m = −∞
∞
∑ y[ m]z
− (m + n o )
m = −∞
= z − n o G( z ). In this case, the ROC of Y ( z ) is same as that of G ( z )
except for the possible addition or elimination of the point z = 0 or z = ∞ (due to the
factor of z − n o ).
∞
∞
∞
n = −∞
n = −∞
n = −∞
(e) y[ n] = α n g[ n]. Hence, Y ( z) = ∑ y[ n]z − n = ∑ αg[ n]z − n = ∑ g[ n]( z / α ) − n
= G ( z / α ). The ROC of Y ( z ) is α R g .
∞
∞
(f) y[ n] = n g[ n]. Hence, Y ( z) = ∑ y[ n]z − n = ∑ ng[ n]z − n . Now,
n = −∞
∞
n = −∞
∞
dG( z)
= − ∑ ng[ n]z − n −1 . Hence,
dz
n = −∞
n = −∞
∞
dG( z)
dG( z )
. In this case, the ROC of
−z
= ∑ ng[ n]z − n −1 . Thus, Y(z) = Z{ng[ n]} = −
dz
dz
n = −∞
Y ( z ) is same as that of G ( z ) except possibly the point z = 0 or z = ∞ .
G( z ) = ∑ g[ n]z − n . Thus,
6.28 From Eq. (6.111), for N = 3, we get
⎡1 z −1 z − 2 ⎤
0
0
⎢
⎥
−1
D 3 = ⎢1 z1
z1− 2 ⎥. The determinant of D 3 is given by
⎢1 z −1 z − 2 ⎥
2
2 ⎦⎥
⎣⎢
1 z 0−1
det(D 3 ) = 1 z1−1
1 z 2−1
z 0− 2
1
z 2− 2
0 z 2−1 − z 0−1
z1− 2 = 0 z1−1 − z 0−1
= ( z1−1 − z 0−1 )( z 2−1 − z 0−1 )
=
z 0−1
1 z1−1 + z 0−1
1
z 2−1
+ z 0−1
z 0− 2
z −1 − z −1
z1− 2 − z 0− 2 = 1−1 0−1
z2 − z0
z 2− 2 − z 0− 2
z1− 2 − z 0− 2
z 2− 2 − z 0− 2
= ( z1−1 − z 0−1 )( z 2−1 − z 0−1 )( z 2−1 − z1−1 )
−1
−1
∏ ( z k − z l ).
2≥k ≥l≥0
From Eq. (6.111), for N = 4, we get
Not for sale.
160
1 z 0−1
D4 =
1 z1−1
1 z 2−1
1 z3−1
z 0− 2
z1− 2
z 2− 2
z3− 2
1 z 0−1
1 z1−1
det(D 4 ) =
1 z 2−1
1 z3−1
z1−1 − z 0−1
= z 2−1 − z 0−1
z3−1 − z 0−1
z 0− 3
z1− 3
. The determinant of D 4 is given by
z 2− 3
z3− 3
z 0− 2
z1− 2
z 2− 2
z3− 2
z1− 2 − z 0− 2
z 2− 2 − z 0− 2
z3− 2 − z 0− 2
z 0− 3
z 0−1
1
z 0− 2
z1− 3 0 z1−1 − z 0−1
=
z 2− 3 0 z 2−1 − z 0−1
z 3− 3 0 z3−1 − z 0−1
z1− 2 − z 0− 2
z 2− 2 − z 0− 2
z3− 2 − z 0− 2
z 0− 3
z1− 3 − z 0− 3
z 2− 3 − z 0− 3
z3− 3 − z 0− 3
z1− 3 − z 0− 2
z 2− 3 − z 0− 2
z3− 3 − z 0− 2
1 z1−1 + z 0−1
z1− 2 + z1−1 z 0−1 + z 0− 2
= ( z1−1 − z 0−1 )( z 2−1 − z 0−1 )( z3−1 − z 0−1 ) 1 z 2−1 + z 0−1
1 z 3−1 + z 0−1
z 2− 2 + z 2−1 z 0−1 + z 0− 2
z 3− 2 + z3−1 z 0−1 + z 0− 2
1 z1−1 + z 0−1
z1− 2 + z1−1 z 0−1 + z 0− 2
= ( z1−1 − z 0−1 )( z 2−1 − z 0−1 )( z3−1 − z 0−1 ) 0 z 2−1 − z 0−1
0 z3−1 − z 0−1
( z 2−1 − z 0−1 )( z 2−1 + z1−1 + z 0−1 )
( z3−1 − z 0−1 )( z3−1 + z1−1 + z 0−1 )
z −1 − z −1 ( z 2−1 − z1−1 )( z 2−1 + z1−1 + z 0−1 )
= ( z1−1 − z 0−1 )( z 2−1 − z 0−1 )( z3−1 − z 0−1 ) 2−1 1−1
z3 − z1
( z3−1 − z1−1 )( z3−1 + z1−1 + z 0−1 )
= ( z1−1 − z 0−1 )( z 2−1 − z 0−1 )( z 3−1 − z 0−1 )( z 2−1 − z1−1 )( z 3−1 − z1−1 )( z 3−1 − z 2−1 )
=
−1
−1
∏ ( z k − z l ) . Hence, in the general case, det( D N ) =
3≥ k ≥ l ≥ 0
−1
−1
∏ ( z k − z l ). It follows
N − 1≥ k ≥ l ≥ 0
from this expression that the determinant det(D N ) is non-zero, i.e., D N is non-singular, if
the sampling points z k are distinct.
6.29 X ( z) = 1 − 2 z −1 + 3z −2 − 4 z −3 . Thus,
1
X NDFT [ 0] = X ( z 0 ) = 1 − 2⎛⎜ − ⎞⎟
⎝ 2⎠
−1
1
+ 3⎛⎜ − ⎞⎟
⎝ 2⎠
X NDFT [1] = X ( z1 ) = 1 − 2 + 3 − 4 = −2,
1
X NDFT [ 2] = X ( z 2 ) = 1 − 2⎛⎜ ⎞⎟
⎝2⎠
1
X NDFT [3] = X ( z 3 ) = 1 − 2⎛⎜ ⎞⎟
⎝ 3⎠
−1
−1
1
+ 3⎛⎜ ⎞⎟
⎝2⎠
1
+ 3⎛⎜ ⎞⎟
⎝ 3⎠
−2
−2
−2
1
− 4⎛⎜ − ⎞⎟
⎝ 2⎠
1
− 4⎛⎜ ⎞⎟
⎝2⎠
1
− 4⎛⎜ ⎞⎟
⎝ 3⎠
Not for sale.
−3
−3
−3
= 1 + 4 + 3 ⋅ 4 + 4 ⋅ 8 = 49,
= 1 − 4 + 3 ⋅ 4 − 4 ⋅ 8 = −23,
= 1 − 2 ⋅ 3 + 3 ⋅ 9 − 4 ⋅ 27 = −86.
161
I 0 ( z ) = (1 − z −1 )(1 − z −1 )(1 − z −1 ) = 1 −
11 −1
1
1
z + z − 2 − z − 3 ⇒ I 0 (− ) = 10,
6
6
2
1
1 −1
1 −1
1 −1
1 −1 1 − 2
1 −3
I1 ( z ) = (1 + z )(1 − z )(1 − z ) = 1 − z − z + z ⇒ I1 (1) = ,
2
2
3
3
4
12
2
1
2
1
3
2
1
1
5
1
1
1
I 2 ( z ) = (1 + z −1 )(1 − z −1 )(1 − z −1 ) = 1 − z −1 − z − 2 + z − 3 ⇒ I 2 ( ) = − ,
2
3
6
3
6
2
3
5
1
1
1
1
1
I 3 ( z ) = (1 + z −1 )(1 − z −1 )(1 − z −1 ) = 1 − z −1 − z − 2 + z − 3 ⇒ I 3 ( ) = .
2
2
4
4
3
2
49
−2
− 23
− 86
Therefore, X ( z ) =
I 0 ( z) +
I1 ( z ) +
I 2 (z) +
I 3 ( z)
10
1/ 2
− 2/3
5/2
= 4.9 I 0 ( z ) − 4 I1 ( z ) + 34.5I 2 ( z ) − 34.4 I 3 ( z ) = 1 − 2 z −1 + 3z −2 − 4 z −3 .
∞
ˆ
6.30 (a) X ( z ) = ∑ x[ n]z − n . Let Xˆ ( z ) = log( X ( z )) ⇒ X ( z ) = e X ( z ) . Thus,
X ( e jω ) = e
(b) xˆ[ n] =
n = −∞
Xˆ (e jω )
.
(
)
1 π
jω
jωn
jω
− jω
).
∫ log X (e ) e dω. If x[n] is real, then X (e ) = X * (e
2π − π
(
)
(
)
Therefore, log X (e jω ) = log X * (e − j jω ) . .
xˆ * [ n] =
(
)
(
)
1 π
1 π
jω
− jωn
− jω
dω =
) e − jωn dω
∫ log X * (e ) e
∫ log X (e
2π − π
2π − π
=
(
)
1 π
jω
jωn
∫ log X (e ) e dω = xˆ[ n].
2π − π
(
xˆ[ n] + xˆ[ − n] 1 π
jω
(c) xˆ ev [ n] =
=
∫ log X (e )
2
2π − π
=
Similarly, xˆ ev [ n] =
(
)
)
⎛ e jωn + e − jωn ⎞
⎜
⎟ dω
⎜
⎟
2
⎝
⎠
1 π
jω
∫ log X (e ) cos(ωn)dω.
2π − π
(
xˆ[ n] − xˆ[ − n] 1 π
jω
=
∫ log X (e )
2
2π − π
=
π
(
)
)⎛⎜⎜ e
⎝
j ωn
− e − jωn ⎞⎟
dω
⎟
2
⎠
j
jω
∫ log X (e ) sin(ωn)dω.
2π − π
6.31 x[ n] = aδ[ n] + bδ[ n − 1]. Thus, X ( z ) = Z{x[ n]} = a + bz −1. Also,
∞
n
(b / a ) − n
z .
Xˆ ( z) = log(a + bz −1 ) = log(a ) + log(1 + b / az −1 ) = log(a) + ∑ (−1) n −1
n
n = −∞
Not for sale.
162
log( a ),
if n = 0,
⎧
⎪
n
(b / a )
⎪
Therefore, xˆ[ n] = ⎨(−1) n −1
, for n > 0,
n
⎪
0,
otherwise.
⎪⎩
Nγ
Nα
Nβ
Nδ
6.32 (a) Xˆ ( z ) = log( K ) + ∑ log(1 − α k z −1 ) + ∑ log(1 − γ k z ) − ∑ log(1 − β k z −1 ) − ∑ log(1 − δ k z )
k =1
n
Nα ∞ α
k −n
= log( K ) − ∑ ∑
k =1 n =1 n
z
k =1
k =1
n
n
N
Nλ ∞ γ
Nδ ∞ δ n
β ∞ β
k n
k −n
k n
− ∑ ∑
k =1 n =1 n
z − ∑ ∑
k =1 n =1 n
z
− ∑ ∑
k =1 n =1 n
k =1
z .
⎧
⎪
log( K ),
n = 0,
⎪
n
n
N
Nα ∞ α
⎪⎪ β ∞ β
Thus, xˆ[ n] = ⎨ ∑ ∑ k − ∑ ∑ k , n > 0,
⎪ k =1 n =1 n k = 1 n =1 n
⎪ Nγ ∞ γ−n Nδ ∞ δ −n
⎪ ∑ ∑ k − ∑ ∑ k , n < 0.
k =1 n =1 n
⎩⎪k =1 n =1 n
(b) xˆ[ n] < N
r
n
as n → ∞, where r is the maximum value of α k , β k , γ k , and δ k for all
n
values of k, and N is a constant. Thus, xˆ[ n] is a decaying bounded sequence as n → ∞.
(c) From Part (a) if α k = β k = 0, then xˆ[ n] = 0 for all n > 0, and is thus anti-causal.
(d) If γ k = δ k = 0, then xˆ[ n] = 0 for all n < 0, and is thus causal.
6.33 If X ( z ) has no poles and zeros on the unit circle, then from Part (b) of Problem 6.32,
γ k = δ k = 0, then xˆ[ n] = 0 for all n < 0.
dXˆ ( z)
1 dX ( z)
dXˆ ( z )
dX ( z )
=
. Thus, z
Xˆ ( z ) = log (X ( z )). Therefore,
.
= zX ( z )
dz
X ( z) dz
dz
dz
n
Taking the inverse –transform we get nx[ n] = ∑ k xˆ[ k ]x[ n − k ], n ≠ 0. Or,
k =0
n −1 k
x[ n] = ∑
k =0 n
xˆ[ k ]x[ n − k ] + xˆ[ n]x[0]. Hence, xˆ[ n] =
x[ n] n −1 ⎛ k ⎞ xˆ[ k ]x[ n − k ]
, n ≠ 0.
− ∑ ⎜ ⎟
x[0] k = 0 ⎝ n ⎠
x[0]
For n = 0, xˆ[0] = Xˆ ( z ) z = ∞ = X ( z ) z = ∞ = log( x[0]). Thus,
Not for sale.
163
⎧
⎪
0,
n < 0,
⎪
xˆ[ n] = ⎨
log( x[0]),
n = 0,
⎪ x[ n] n −1 ⎛ k ⎞ xˆ[ k ]x[ n − k ]
− ∑ ⎜ ⎟
, n > 0.
⎪
x[0]
⎩ x[0] n = 0 ⎝ n ⎠
6.34
| H(e j5ω ) |
0
0.02π
0.06π
_π
5
π
3π
__
5
ω
6.35 Given the real part of a real, stable transfer function
∑ N a cos(iω) A(e jω )
,
H re (e jω ) = i = 0 i
=
∑ iN= 0 bi cos(iω) B(e jω )
the problem is to determine the transfer function H ( z ) =
(6-1)
−i
P( z ) ∑ iN= 0 pi z
.
=
D( z ) ∑ iN= 0 pi z − i
(a) H re (e jω ) = [ H (e jω ) + H * (e jω )] = [ H (e jω ) + H (e − jω )]
2
2
1
1
= [ H ( z ) + H ( z −1 )]
1
2
z = e jω
.
Substituting H ( z ) = P ( z ) / D( z ) in the above we get
H re (e jω ) =
1 P ( z ) D( z − 1 ) + P ( z − 1 ) D ( z )
2
D( z ) D( z − 1 )
,
(6-2)
z = e jω
which is Eq. (6.117).
(b) Comparing Eqs. (6-1) and (6-2) we get B(e jω ) = D( z ) D( z −1 )
A(e jω ) = [ P( z) D( z −1 ) + P( z −1 ) D( z)]
1
2
z = e jω
z = e jω
,
(6-3)
.
(6-4)
N
Now, D ( z ) is of the form D( z ) = Kz − N ∏ ( z − z i ),
i =1
jω
where the zi ' s are the roots of B( z ) = B(e
)
e jω = z
(6-5)
inside the unit circle and K is a scalar
constant. Putting ω = 0 in Eq. (6-3) we get B(1) = [ D(1)]2 , or
Hence,
K = B(1) / ∏ iN=1 (1 − zi ).
Not for sale.
B(1) = K ∏ iN=1 (1 − zi ).
(6-6)
164
(c) By analytic continuation, Eq. (6-4) yields A( z ) = [ P( z ) D( z −1 ) + P( z −1 ) D( z )]. (6-7)
1
2
Substituting A( z ) =
1 N
i
−i
∑ ai ( z + z ) and the polynomial forms of P ( z ) and D ( z ), we get
2 i =0
N
N
N
N
⎛ N
i
−i
− i ⎞⎛
i⎞ ⎛
i ⎞⎛
−i ⎞
∑ ai ( z + z ) = ⎜⎜ ∑ p i z ⎟⎟⎜⎜ ∑ d i z ⎟⎟ + ⎜⎜ ∑ p i z ⎟⎟⎜⎜ ∑ d i z ⎟⎟ and equating the coefficients
i =0
⎠
⎠⎝ i = 0
⎠ ⎝ i =0
⎠⎝ i = 0
⎝i =0
of ( z i + z −i ) on both sides, we arrive at a set of N equations which can be solved for the
numerator coefficients pi of H ( z ).
For the given example, i.e., H re (e) =
1 + cos(ω) + cos(2ω)
, we observe
17 − 8 + cos(2ω)
A( z ) = 1 + ( z + z −1 ) + ( z 2 + z − 2 ).
1
2
1
2
Also, B( z ) = 17 − 4( z 2 + z −2 ), which has roots at z = ±
1
2
(6-8)
and z = ±2. Hence,
D( z ) = Kz − 2 ( z − )( z + ) = K ( z 2 − )z − 2 .
1
2
1
4
1
2
(6-9)
Also, from Eq. (6-6) we have K = 17 − 8 /(1 − ) = 4, so that D( z ) = 4 − z −2 .
1
4
Substituting Eqs. (6-8), (6-9) and P ( z ) = p0 + p1 z −1 + p2 z −2 in Eq. (6-7) we get
[
]
1 + ( z + z −1 ) + ( z 2 + z − 2 ) = ( p0 + p1 z −1 + p2 z − 2 )(4 − z 2 ) + ( p0 + p1 z + p2 z 2 )(4 − z − 2 ) .
2
2
1
1
Equating the coefficients of ( z i + z −i ) / 2, 0 ≤ i ≤ 2, on both sides we get
4 p0 − p2 = 1, 3 p1 = 1, 4 p2 − p0 = 1. Solving these equations we then arrive at
p0 = p1 = p2 = 1 / 3. Therefore, H ( z ) =
1 + z −1 + z −2
3(4 − z − 2 )
.
d M + d M − 1 z −1 + L + d 1 z − M + 1 + z − M
⇒ A(1) = 1 and A( −1) = −1 if M is odd.
1 + d1 z −1 + L + d M −1 z − M + 1 + d M z − M
In which case, G (1) = H (1) and G ( −1) = H (−1). If is even, then G (1) = H (1) and
G ( −1) = H (1). .
6.36 A( z ) =
6.37 H ( z ) = H1 ( z ) H 2 ( z ) + H 3 ( z ) = (1.2 + 3.3z −1 + 0.7 z −2 )(−4.1 − 2.5z −1 + 0.9 z −2 )
+ 2.3 + 4.3z −1 + 0.8 z −2 = −2.62 − 12.23z −1 − 9.24 z −2 + 1.22 z −3 + 0.63z −4 .
6.38 (a) (1 − 0.1z −1 + 0.14 z −2 + 0.49z −3 )Y ( z ) = (5 + 9.5z −1 + 1.4 z −2 − 24 z −3 ) X ( z ) ⇒
Not for sale.
165
Y (z)
5 + 9.5z −1 + 1.4 z −2 − 24 z −3
=
. Using Program 6_1.m we factorize H ( z )
X ( z) 1 − 0.1z −1 + 0.14 z − 2 + 0.49z − 3
and develop is pole-zero plot shown below:
H ( z) =
Numerator factors
1.00000000000000
3.10000000000000
1.00000000000000 -1.20000000000000
4.00000000000000
0
Denominator factors
1.00000000000000 -0.80000000000000
1.00000000000000
0.70000000000000
0.70000000000000
0
Gain constant
5
The factored form of H ( z ) is thus H ( z ) =
5(1 + 3.1z −1 + 4 z −2 )(1 − 1.2 z −1 )
(1 − 0.81z −1 + 0.7 z − 2 )(1 + 0.7 z −1 )
Imaginary Part
1
0.5
0
-0.5
-1
-1
0
Real Part
1
As all poles are inside the unit circle, H ( z ) is BIBO stable.
(b) (1 − 0 . 5 z − 1 + 0 . 1 z − 2 + 0 . 3 z − 3 − 0 . 0936 z − 4 )Y ( z )
= (5 + 16.5z −1 + 14.7z −2 − 22.4 z −3 − 33.6 z −4 ) X ( z ) ⇒
Y ( z) 5 + 16.5z −1 + 14.7z −2 − 22.4 z −3 − 33.6 z −4
. Using Program 6_1.m we
=
X ( z) 1 − 0.5z −1 + 0.1z − 2 + 0.3z − 3 − 0.0936z − 4
factorize H ( z ) and develop is pole-zero plot shown below:
H (z) =
Numerator factors
1.00000000000000
1.00000000000000
1.00000000000000
-1.20000000000000
3.10000000000001
1.39999999999999
0
4.00000000000001
0
Denominator factors
1.00000000000000
1.00000000000000
1.00000000000000
0.59950918226500
-0.80131282790906
-0.29819635435594
0
0.52021728677142
0
Not for sale.
166
Gain constant
5
The factored form of H ( z ) is thus
5(1 − 1.2 z −1 )(1 + 3.1z −1 + 4 z −2 )(1 + 1.4 z −1 )
H ( z) =
(1 + 0.5995 z −1 )(1 − 0.801313 z −1 + 0.520217 z − 2 )(1 − 0.2982 z −1 )
As all poles are inside the unit circle, H ( z ) is BIBO stable.
Imaginary Part
1
0.5
0
-0.5
-1
-2
-1
0
Real Part
1
6.39 A partial-fraction expansion of H ( z ) in z −1 using the M-file residuez yields
H ( z) = −
1.21212
1 − 0.4 z −1
+
2.21212(1 − 0.81781z −1 )
1 + 0.5z −1 + 0.3z − 2
. Comparing the denominator of the
quadratic factor with 1 − 2r cos(ω o ) z −1 + r 2 z −2 we get r = 0.3 = 0.54772 and
0.5
cos(ωo ) = −
, or ωo = 2.04478. Hence, from Table 6.1 we have
2 0.3
h[ n] = −1.21212(0.4) n µ[ n] + ( 0.3 ) n cos(2.04478n)µ[ n].
6.40 (a) A partial-fraction expansion of H ( z ) in z −1 using the M-file residuez yields
5
2
H ( z ) = −2 +
−
. Hence, from Table 6.1 we have
−1
1 + 0 .6 z
1 − 0 .3 z − 1
h[ n] = −2δ[ n] + 5(−0.6) n µ[ n] − 2(0.3) n µ[ n].
(b) x[ n] = 2.1(0.4) n µ[ n] + 0.3(−0.3) n µ[ n]. Its z –transform is thus given by
X ( z) =
2 .1
1 − 0 .4 z − 1
+
0 .3
1 + 0 .3 z − 1
=
2.4 + 0.51z −1
(1 − 0.4 z −1 )(1 + 0.3z −1 )
, z > 0.4. The z –transform of
⎡
⎤ ⎡1 − 3.3z −1 + 0.36 z − 2 ⎤
2.4 + 0.51z −1
the output is then given by Y ( z ) = ⎢
⎥⋅⎢
⎥.
⎢⎣ (1 − 0.4 z −1 )(1 + 0.3z −1 ) ⎥⎦ ⎢⎣1 + 0.3z −1 − 0.18 z − 2 ⎥⎦
A partial-fraction expansion of Y ( z ) in z −1 using the M-file residuez yields
Not for sale.
167
Y ( z) =
9.3
1 + 0.6z −1
−
(
16.8
+
1 − 0 .4 z − 1
12.3
−
1 − 0.3z −1
2.4
1 + 0.3z −1
, z > 0.6. Hence, from Table 6.1
)
we have y[ n] = 9.3(−0.6) n − 16.8(0.4) n + 12.3(0.3) n − 2.4(−0.3) n µ[ n].
6.41 (a) H ( z ) = Z{h[ n]} =
Y ( z) = H ( z) X ( z) =
1
1 + 0 .4 z − 1
1
, z > 0.4, X ( z ) = Z{x[ n]} =
(1 + 0.4 z −1 )(1 − 0.2 z −1 )
using the M-file residuez yields Y ( z ) =
2
3
1
1 − 0 .2 z − 1
, z > 0.4. Thus,
, z > 0.4. A partial-fraction expansion of
2/3
1 + 0 .4 z
−1
+
1/ 3
1 − 0 .2 z − 1
. Hence, from Table 6.1
1
3
y[ n] = (−0.4) n µ[ n] + (0.2) n µ[ n].
(b) H ( z ) = Z{h[ n]} =
Y ( z) = H ( z) X ( z) =
1
1 + 0 .2 z
1
−1
(1 + 0.2 z −1 ) 2
, z > 0.2, X ( z ) = Z{x[ n]} =
1
1 + 0 .2 z − 1
, z > 0.4. Thus,
, z > 0.2. Hence, from Table 6.1,
y[ n] = (n + 1)(−0.2) n µ[ n].
6.42 Y ( z ) = Z{y[ n]} =
2
1 + 0 .3 z
−1
, z > 0.3, X ( z ) = Z{x[ n]} =
4
1 − 0 .6 z − 1
, z > 0.2. Thus,
Y ( z ) 0.5(1 − 0.6 z −1 )
=
, z > 0.3. A partial-fraction expansion of using the M-file
X ( z)
1 + 0.3z −1
1 .5
residuez yields H ( z ) = −1 +
. Hence, from Table 6.1,
1 + 0 .3 z − 1
H (z) =
h[ n] = − δ[ n] + 1.5(−0.3) n µ[ n].
6.43 (a) Taking the –transform of both sides of the difference equation we get
Y (z)
2
Y ( z ) = 0.2 z −1Y ( z ) + 0.08z −2Y ( z ) + 2 X ( z ). Hence, H ( z ) =
=
.
X ( z ) 1 − 0.2 z −1 − 0.08 z − 2
(b) A partial-fraction expansion of using the M-file residuez yields
4/3
2/3
H ( z) =
+
. Hence, from Table 6.1,
−1
1 − 0 .4 z
1 + 0 .2 z − 1
4
3
2
3
h[ n] = (0.4) n µ[ n] + (−0.2) n µ[ n].
(c) Now S ( z ) = Z{s[ n]} = H ( z ) ⋅ Z{µ[ n]} =
Not for sale.
2
(1 − 0.2 z −1 − 0.08z − 2 )(1 − z −1 )
.
168
A partial-fraction expansion of using the M-file residuez yields
2.7778
0.8889
0.1111
S ( z) =
−
+
. Hence, from Table 6.1,
−1
−1
1− z
1 − 0 .4 z
1 + 0 .2 z − 1
s[ n] = 2.7778 µ[ n] − 0.8889(0.4) n µ[ n] + 0.1111(−0.2) n µ[ n].
6.44 H ( z) =
1 − z −2
1 − (1 + α) cos(ωc )z −1 + αz − 2
. Thus,
1 − e j 2ω
H ( e jω ) =
.
1 − (1 + α) cos(ωc ) e − jω + αe − j 2ω
2(1 − cos 2ω)
H ( e jω ) 2 =
2
2
1 + (cos ω c ) (1 + α ) + α 2 + 2α cos 2ω − 2 cos ω c (1 + α ) 2 cos ω
=
4 sin 2 ω
2
2
2
(1 + α) (cos ω − cos ωc ) + (1 − α) sin ω
. Note that H (e jω ) 2 is maximum when
cos ω = cos ωc , i.e, ω = ωc . Then H (e jω c ) 2 =
4 sin 2 ωc
(1 − α) 2 sin 2 ωc
=
4
(1 − α) 2
, and hence,
H (e jω c ) = 2 /(1 − α ).
6.45 H ( z ) = 1 − αz −R ⇒ H (e jω ) = 1 − αe − jωR . Then, H (e jω = 1 + α 2 − 2α cos(ωR).
H(e jω is maximum when cos( ωR ) = −1 and is minimum when cos(ωR ) = 1. The
maximum value of H (e jω ) is 1 + α , and the minimum value is 1 − α . H(e jω has R
peaks and R dips in the range 0 ≤ ω < 2π.
2 πk
(2 k + 1)π
and the dips are located at ω = ω k =
The peaks are located at ω = ω k =
,
R
R
0 ≤ k ≤ R − 1.
Phase Response
1
1.5
0.5
Phase, radians
Amplitude
Magnitude Response
2
1
0.5
0
0
0.5
(
6.46 G (e jω ) = H (e jω )
1
ω/π
1.5
2
0
-0.5
-1
0
0.5
1
1.5
2
ω/ π
)3 = (1 − αe jωR )3 .
Not for sale.
169
M −1
6.47 G(e jω ) = ∑ α n e − jωn =
n=0
1 − α M e − jωM
1 − αe
− jω
. Note that G (e jω ) = H (e jω ) for
1− αM
. Hence, to make the dc value of the
1− α
magnitude response equal to unity, the impulse response should be multiplied by a constant
αn =
1
,
M
0 ≤ n ≤ M − 1. Now, G(e j 0 ) =
K = (1 − α ) /(1 − α M ) .
6.48 Y (e jω ) = X (e jω ) + αe − jωR Y (e jω ). Hence, H (e jω ) =
Y ( e jω )
=
1
. Maximum
X ( e jω ) 1 − α e − jωR
1
1
. There are R peaks and dips
value of H (e jω ) is
and the minimum value is
1− α
1+ α
in the range 0 ≤ ω ≤ 2π. The locations of the peaks and dips are given by
α
1 − αe − jωR = 1 ± α or, e − jωR = ± . The locations of the peaks are given by
α
(2π + 1)k
2πk
and the locations of the dips are given by ω = ωk =
,
ω = ωk =
R
R
0 ≤ k ≤ R − 1. Plots of the magnitude and phase responses of H (e jω ) for α = 0.8 and
R = 6 are shown below:
Phase Response
1
4
0.5
Phase, radians
Amplitude
Magnitude Response
5
3
2
1
0
0
0.5
jω
1
ω/π
2
-0.5
-1
0
0.5
1
1.5
2
ω/ π
b0 + b1e − jω + b2 e − j 2ω
(b0 e jω + b2 e − jω ) + b1
=
1 + a1e − jω + a 2 e − j 2ω
(e jω + a 2 e − jω ) + a1
b + (b0 + b2 ) cos ω + j (b0 − b2 ) sin ω
. Therefore,
= 1
a1 + (1 + a 2 ) cos ω + j (1 − a 2 ) sin ω
6.49 A(e
A(e
)=
1.5
0
jω
)
2
[
b1 + (b0 + b2 )]2 cos 2 ω + (b0 − b2 ) 2 sin 2 ω
= 1. Hence, at ω = 0, we have
=
[a1 + (1 + a2 )]2 cos 2 ω + (1 − a2 ) 2 sin 2 ω
b1 + (b0 + b2 ) = ±[ a1 + (1 + a 2 )], and at ω = π / 2, we have b0 − b2 = ± (1 − a 2 ).
Solution #1: Consider b0 − b2 = 1 − a 2 . Choose b 0 = 1, − b 2 = 1 − a 2 , and b 2 = a 2 .
Substituting these values in b1 + (b0 + b2 ) = ±[ a1 + (1 + a 2 )], we get b1 = a1 . In this case,
Not for sale.
170
A(e
jω
)=
1 + a1e − jω + a 2 e − j 2ω
1 + a1e − jω + a 2 e − j 2ω
= 1, a trivial solution.
Solution #2: Consider b0 − b2 = a 2 − 1. Choose b0 = a 2 and b2 = 1. Substituting these
values in b1 + (b0 + b2 ) = ±[ a1 + (1 + a 2 )], we get b1 = a1 . In this case,
A(e jω ) =
a 2 + a1e − jω + e − j 2ω
.
1 + a1e − jω + a 2 e − j 2ω
6.50 From Eq. (2.20), the input-output relation of a factor-of-2 up-sampler is given by
⎧ x[ n / 2], n = 0, ± 2, ± 4,K
x u [ n] = ⎨
otherwise.
⎩ 0,
The DTFT of x u [n] is therefore given by
∞
Y (e jω ) = ∑ y[ n]e − jωn =
n = −∞
∞
∑ x[ n / 2]e
− jωn
n = −∞
n even
=
∞
∑ x[ m]e
− j 2ωm
m = −∞
= X (e j 2ω ) where X (e jω )
is the DTFT of x[n].
1
. Thus,
1 − 0.5 cos ω + j 0.5 sin ω
1 − 0.5e
1
1
H (e ± jπ / 4 ) =
=
= 0.6512 m j1.1907.
1 − 0.5 cos(± π / 4) + j 0.5 sin(± π / 4) 0.6464 ± j 0.3536
6.51 H (e jω ) =
1
− jω
=
Therefore, H (e ± jπ / 4 ) = 1.3572 and arg{H (e ± jπ / 4 )} = θ (± jπ / 4) = m1.0703.
Now, for an input x[ n] = sin(ω o n) µ[ n], the steady-state output is given by
y[ n] = H (e jωo ) sin (ωo n + θ (ωo )) which for ωo = π / 4 reduces to
π
π
y[ n] = H (e jπ / 4 ) sin⎛⎜ n + θ (π / 4) ⎞⎟ = 1.3572 sin⎛⎜ n − 1.0703 ⎞⎟.
4
⎝
⎠
⎝4
⎠
6.52 To guarantee the stability of G ( z ), the transformation z → F ( z ) should be such that the
unit circle remains inside the ROC after the mapping. If the points inside the unit circle
after the mapping remains inside the unit circle, G ( z ) will be causal and stable. On the
other hand, if the points inside the unit circle after the mapping move outside the unit
circle, G ( z ) will be stable but anti-causal. For example, the mapping z → − z will ensure
that G ( z ) will be causal and stable, whereas, the mapping z → z −1 will result in a G ( z )
that is stable, but anti-causal.
6.53
Not for sale.
171
K
6.54
∞
−1
n
∑ h[ n] = 0.95 ∑ h[ n] . Since H ( z) = 1 /(1 − βz ), h[ n] = ( β ) µ[ n]. Thus,
2
n=0
1− β
2
n=0
2K
1− β
2
=
0.95
1− β
2
. Solving this equation for we get K = 0.5
log(0.05)
.
log( α )
6.55 Let the output of the predictor of Figure P6.3(a) be denoted by E ( z ). Then analysis of this
structure yields E ( z) = P( z)[U ( z) + E ( z)] and U ( z ) = X ( z ) − E ( z ). From the first equation
P( z)
we have E ( z ) =
U ( z ) which when substituted in the second equation yields
1 − P( z )
U ( z)
H (z) =
= 1 − P ( z).
X (z)
Analyzing Figure P6.3(b) we get Y ( z ) = V ( z ) + P ( z )Y ( z ) which leads to
1
Y ( z)
, which is seen to be the inverse of H ( z ).
G( z) =
=
V ( z ) 1 − P( z)
1
For P ( z) = h1 z −1 , H ( z ) = 1 − h1 z −1 and G ( z ) =
. Similarly, for
1 − h1 z −1
1
P( z ) = h1 z −1 + h2 z −2 , H ( z) = 1 − h1 z −1 − h2 z −2 and G ( z ) =
.
−1
1 − h1 z − h2 z − 2
6.56 Y ( z) = [H 0 ( z)F0 ( z) − H 0 (− z )F0 (− z)]X ( z). Since the output is a delayed replica of the
input, we must have H 0 ( z ) F0 ( z ) − H 0 ( − z ) F0 ( − z ) = z − r . But, H 0 ( z ) = 1 + αz −1 . Hence,
(1 + αz −1 ) F0 ( z ) − (1 − αz −1 )F0 ( − z ) = z −r . Let F0 ( z ) = a 0 + a1 z −1 . This implies,
2( a 0 α + a1 ) z −1 = z −r .
The solution is therefore, r = 1 and 2(a 0 α + a1 ) = 1. One possible solution is thus
a 0 = 1 / 2 and a1 = 1 / 4. Hence, F0 ( z ) = 0.25(1 + z −1 ).
6.57 H1 ( z ) = Z{h1[ n]} = 1.2 +
0 .5
−
0 .6
1 + 0 .5 z − 1 1 − 0 .2 z − 1
function of the inverse transform is thus
=
1.1 − 0.04 z −1 − 0.12 z −2
1 + 0.3z −1 − 0.1z − 2
. The transfer
1
1 + 0.3z −1 − 0.1z −2
(1 + 0.5z −1 )(1 − 0.2 z −1 )
=
. As both
=
H1 ( z ) 1.1 − 0.04 z −1 − 0.12 z − 2 1.1(1 − 0.349 z −1 )(1 + 0.3126 z −1 )
poles are inside the unit circle, H 2 ( z) is stable and causal with an ROC z > 0.349. A
H 2 ( z) =
partial-fraction expansion in obtained using the M-file residuez is
Not for sale.
172
0.498
0.42224464
1
+
−
. Hence,
1.2 1 − 0.34897 z −1 1 + 0.31261z −1
1
δ[ n] + 0.498(0.34897) n µ[ n] − 0.42224464(−0.31261) n µ[ n].
1 .2
H 2 (z) =
h2 [ n] =
6.58 Now, H ( z ) z = e jω = H (e jω ) = H (e jω ) e jθ(ω) . Denote H ' ( z) =
dH ( z )
.
dz
From the above we get ln H ( z ) z = e jω = ln H (e jω ) + jθ(ω). Therefore,
jω
d H (e jω ) / dω
H ' ( z) dz
dθ(ω) d H (e ) / dω
=
− jτ g (ω).
⋅
=
+j
H ( z) dω z = e jω
dω
H ( e jω )
H (e jω )
(6-A)
d H (e jω ) / dω
H ' ( z)
−j
Hence, τ g (ω) = − z
.
H ( z ) z = e jω
H ( e jω )
(6-B)
Replacing by in Eq, (6-A) we arrive at
d H (e jω ) / dω
'
(
)
H
z
τ g (ω) = − z −1
+j
.
H ( z ) z = e jω
H (e jω )
Adding Eqs. (6-B) and (6-C), and making use of the notation T ( z) = z
τ g (ω) = −
T ( z ) + T ( z −1 )
2
(6-C)
H ' ( z)
we finally get
H ( z)
.
z = e jω
M6.1 (a) The output data generated by Program 6_1 is as follows:
Numerator factors
1.00000000000000 -2.10000000000000
5.00000000000000
1.00000000000000 -0.40000000000000
0.90000000000000
Denominator factors
1.00000000000000
2.00000000000000
1.00000000000000 -0.20000000000000
4.99999999999999
0.40000000000001
Gain constant
0.50000000000000
Hence, G1 ( z ) =
0.5(1 − 2.1z −1 + 5z −2 )(1 + 2 z −1 + 0.9 z −2 )
(1 + 2 z −1 + 5z − 2 )(1 − 0.2 z −1 + 0.4 z − 2 )
The pole-zero plot of G1 ( z) is given below:
Not for sale.
.
173
Imaginary Part
2
1
0
-1
-2
-3
-2
-1
0
1
Real Part
2
3
There are 3 ROCs associated with G1 ( z) : R1 : z < 0.4 , R 2 : 0.4 < z < 5 ,
and R 3 : z > 5. The inverse z –transform corresponding to the ROC R1 is a leftsided sequence, the inverse z –transform corresponding to the ROC R 2 is a two-sided
sequence, and the inverse z –transform corresponding to the ROC R 3 is a right-sided
sequence.
(b) The output data generated by Program 6_1 is as follows:
Numerator factors
1.00000000000000
1.20000000000000
3.99999999999999
1.00000000000000 -0.50000000000000
0.90000000000001
Denominator factors
1.00000000000000
2.10000000000000
1.00000000000000
0.60000000000003
1.00000000000000
0.39999999999997
4.00000000000001
0
0
Gain constant
1
Hence, G2 ( z ) =
(1 + 1.2 z −1 + 4 z −2 )(1 − 0.5z −1 + 0.9 z −2 )
(1 + 2.1z −1 + 4 z − 2 )(1 + 0.6 z −1 )(1 + 0.4 z −1 )
The pole-zero plot of G2 ( z) is given below:
Imaginary Part
2
1
0
-1
-2
-2
-1
0
1
Real Part
2
There are 4 ROCs associated with G2 ( z) : R1 : z < 0.4, R 2 : 0.4 < z < 0.6,
Not for sale.
174
R 3 : 0.6 < z < 2, and R 4 : z > 2. The inverse z –transform corresponding to the ROC
R1 is a left-sided sequence, the inverse z –transform corresponding to the ROC R 2 is a
two-sided sequence, the inverse z –transform corresponding to the ROC R 3 is a twosided sequence, and the inverse z –transform corresponding to the ROC R 4 is a rightsided sequence.
M6.2 (a) The output data generated by Program 6_3 is as follows:
Residues
-3.33333333333333 3.33333333333333
Poles
-0.60000000000000 0.30000000000000
Constants
0
Hence, the partial-fraction expansion of X a (z ) is given by
10 / 3
10 / 3
X a ( z) = −
+
. The z –transform has poles at z = −0.6 and at
1 + 0 .6 z − 1 1 − 0 .3 z − 1
z = 0.3. Thus, it is associated with ROCs as given in the solution of Problem 6.20 which
also shows their corresponding inverse z –transform.
(b) The output data generated by Program 6_3 is as follows:
Residues
Columns 1 through 2
2.33333333333333
-3.66666666666667 + 0.00000008829151i
Column 3
4.33333333333333 - 0.00000008829151i
Poles
Columns 1 through 2
-0.60000000000000
0.30000000000000 - 0.00000000722385i
Column 3
0.30000000000000 + 0.00000000722385i
Constants
Hence, the partial-fraction expansion of X b (z) is given by
2.3333
3.66666
4.33333
. The z –transform has two poles
X b ( z) =
−
+
1 + 0.6 z −1 1 − 0.3z −1 (1 − 0.3z −1 ) 2
at z = −0.6 and one at z = 0.3. Thus, it is associated with ROCs as given in the solution
of Problem 6.20 which also shows their corresponding inverse z –transform.
M6.3 (a) X1 ( z) = 3 −
4
5+ z
−1
−
7
6+z
−1
= 3−
4/5
1 + (1 / 5)z
Not for sale.
−1
−
7/6
1 + (1 / 6)z −1
.
175
The output data generated by Program 6_4 is as follows:
Numerator polynomial coefficients
1.03333333333333
0.73333333333333 0.1000000000000
Denominator polynomial coefficients
1.00000000000000
0.36666666666667
Hence, X1 ( z) =
31 + 22 z
−1
+ 3z
−1
+ z −2
30 + 11z
.
1.4 + z −1
3
(b) X 2 ( z) = −2.5 +
0.03333333333333
−2
−
1 + 0.4 z −1 1 + 0.6 z − 2
3
0.7 − j 6454972243679 0.7 + j 6454972243679
= −2.5 +
−
.
−
1 + 0.4 z −1 1 − j 0.774596669z −1
1 + j 0.774596669z −1
The output data generated by Program 6_4 is as follows:
Numerator polynomial coefficients
-0.9000
-2.5600
-0.1000
-0.6000
Denominator polynomial coefficients
1.0000
0.4000
0.6000
0.2400
Hence, X b ( z) = −
0.9 + 2.56 z −1 + 0.1z −2 + 0.6 z −3
1.0 + 0.4 z −1 + 0.6 z − 2 + 0.24 z − 3
5
(c) X 3 ( z) =
6
+
+
.
−4
1 + 0.64 z −1 4 + 2 z −1 (4 + 2 z −1 ) 2
5
1.5
− 0.25
=
+
+
.
1 + 0.64 z −1 1 + 0.5z −1 (1 + 0.5z −1 ) 2
The output data generated by Program 6_4 is as follows:
Numerator polynomial coefficients
6.2500
6.5500
1.7300
0
Denominator polynomial coefficients
1.0000
1.6400
0.8900
0.1600
Hence, X 3 ( z ) =
6.25 + 6.55z −1 + 1.73z −2
1 + 1.64 z −1 + 0.89z − 2 + 0.16 z − 3
(d) X 4 ( z) = −5 +
2
+
.
z −1
4 + 3z −1 4 + 3z −1 + 0.9z − 2
0.5
j 0.4303
j 0.4303
.
= −5 +
−
+
1 + 0.75z −1 1 + (0.3750 - j0.2905)z −1 1 + (0.3750 + j0.2905)z −1
The output data generated by Program 6_4 is as follows:
Numerator polynomial coefficients
Not for sale.
176
-4.5000
-6.8750
-3.6375
-0.8438
Denominator polynomial coefficients
1.0000
1.5000
0.7875
0.1688
Hence, X 4 ( z) = −
4.5 + 6.875z −1 + 3.6375z −2 + 0.84375z −3
1 + 1.5z −1 + 0.7875z − 2 + 0.16875z − 3
.
M6.4 (a) The inverse z –transform of X a (z ) from it partial-fraction expansion form is thus
4
7
x a [ n] = 3δ[ n] − (−1 / 5) n µ[ n] − (−1 / 6) n µ[ n]. The first 10 samples of xa [n] obtained
5
6
by evaluating this expression in MATAB are given by
Columns 1 through 4
1.0333333333
0.3544444444 -0.0644074074
0.0118012345
Columns 5 through 8
-0.0021802057
0.0004060343
-0.0000762057
0.0000144076
Columns 9 through 10
-0.0000027426
0.0000005254
The first 10 samples of the inverse z–transform of the rational form of X a (z ) obtaining
using the M-file impz are identical to the samples given above.
(b) The inverse z –transform of X b (z) from it partial-fraction expansion form is thus
x b [ n] = −2.5δ[ n] + 3( −0.4) n µ[ n] − (0.7 − j 0.6454972243 679)( j 0.7745966692 41) n µ[ n]
− (0.7 + j 0.6454972243679)(− j 0.774596669241) n µ[ n] .
The first 10 samples of x b [n] obtained by evaluating this expression in MATAB are
given by
Columns 1 through 4
-0.900000000 -2.200000000
1.320000000
0.408000000
Columns 5 through 8
-0.427200000 -0.390720000
0.314688000
0.211084800
Columns 9 through 10
-0.179473920 -0.130386432
The first 10 samples of the inverse z–transform of the rational form of X b (z) obtaining
using the M-file impz are identical to the samples given above.
(c) The inverse z –transform of X c (z ) from it partial-fraction expansion form is thus
x c [ n] = 5( −0.64) n µ[ n] + 1.5(−0.5) n µ[ n] − 0.25( n + 1)( −0.5) n µ[ n].
The first 10 samples of x c [n] obtained by evaluating this expression in MATAB are
given by
Not for sale.
177
Columns 1 through 5
6.250000000 -3.700000000
0.854485800
2.235500000
-1.373220000
Columns 6 through 10
-0.536870912
0.3396911337 -0.215996076
0.137807801
-0.0881188675
The first 10 samples of the inverse z–transform of the rational form of X c (z ) obtaining
using the M-file impz are identical to the samples given above.
(d) The inverse z –transform of X d (z ) from it partial-fraction expansion form is thus
x 4 [ n] = −5 + 0.5(−0.75) n µ[ n] − j 0.430331483(−0.375 + j 0.29047375) n µ[ n]
+ j 0.430331483(−0.375 − j 0.29047375) n µ[ n].
The first 10 samples of x d [n] obtained by evaluating this expression in MATAB are
given by
Columns 1 through 5
4.50000000000000 -0.12499999991919
0.09374999993940 0.12656249997773
0.13710937500069
Columns 6 through 10
-0.12181640625721
0.09610839844318
0.05192523193410 -0.03790274963350
-0.07136938476820
The first 10 samples of the inverse z–transform of the rational form of X d (z ) obtaining
using the M-file impz are identical to the samples given above.
M6.5 To verify using MATLAB that H 2 ( z) =
H1 ( z ) =
1 + 0.3z −1 − 0.1z −2
1.1 − 0.04 z −1 − 0.12 z − 2
is the inverse of
1.1 − 0.04 z −1 − 0.12 z −2
, we determine the first 20 samples of h1[ n] and h2 [ n] ,
1 + 0.3z −1 − 0.1z − 2
and then form the convolution of these two sequences using the M-file conv. The first
samples of the convolution result are as follows:
Columns 1 through 9
1.0000
0 0.0000 0.0000 0.0000 0.0000 0.0000 0.0000 -0.0000
Columns 10 through 18
0.0000 -0.0000 -0.0000 -0.0000 -0.0000
0.0000 -0.0000
0.0000
0.0000
Columns 19 through 21
-0.0000 -0.0000 -0.0000
M6.6 % As an example try a sequence x = 0:24;
% calculate the actual uniform dft
Not for sale.
178
%
%
%
%
%
and then use these uniform samples
with this ndft program to get the
original sequence back
[X,w] = freqz(x,1,25,’whole’);
use freq = X and points = exp(j*w)
freq = input(‘The sample values = ‘);
points = input(‘Frequencies at which samples are taken = ‘);
L = 1;
len = length(points);
val = zeros(size(1,len));
L = poly(points);
for k = 1:len
if (freq(k) ~= 0)
xx = [1 –points(k)];
[yy, rr] = deconv(L,xx);
F(k,:) = yy;
Down = polyval(yy,points(k))*(points(k))*(points(k)^(-len+1));
F(k,:) = freq(k)/down*yy;
val = val+F(k,:);
end
end
coeff = val;
Not for sale.
179
Chapter 7
7.1
⎧⎪ 1 , 0 ≤ n ≤ M − 1,
Impulse response of the moving average filter is: h[ n] = ⎨ M
⎪⎩ 0,
otherwise.
Its frequency response is: H (e jω ) =
1 ⎛⎜ 1 − e − jMω ⎞⎟ 1 sin( Mω / 2) − jMω / 2
= ⋅
e
.
M ⎜⎝ 1 − e − jω ⎟⎠ M sin(ω / 2)
Now, for a BR transfer function, H (e jω ) ≤ 1, ∀ω. For the moving-average filter,
H ( e jω ) =
1 sin( Mω / 2)
. We shall show by induction that
M sin(ω / 2)
1 sin( Mω / 2)
≤ 1, ∀ω. Now, for
M sin(ω / 2)
M = 2, H (e jω ) =
1 sin(ω)
1 2 sin(ω / 2) cos(ω / 2)
=
= cos(ω / 2) ≤ 1, ∀ω.
2 sin(ω / 2) 2
sin(ω / 2)
We assume next that
1 sin( mω / 2)
≤ 1 for 1 ≤ m ≤ M − 1. We can express
m sin(ω / 2)
1 sin( Mω / 2)
1 sin (( M − 1)ω / 2 ) cos(ω / 2) + cos(( M − 1)ω / 2 )sin(ω / 2)
=
M sin(ω / 2)
M
sin(ω / 2)
⎤
1 ⎡ sin(( M − 1)ω / 2 )
cos(ω / 2) + cos(( M − 1)ω / 2 ) ⎥. Now, cos(mω / 2 ) ≤ 1 for
⎢
M⎣
sin(ω / 2)
⎦
1 sin( Mω / 2)
1
all values of m. Hence,
≤ [M − 1 + 1] ≤ 1.
M sin(ω / 2)
M
≤
7.2
A( z ) =
1 − d1* z
(1 − d1* z )(1 − d1z*)
2
. Therefore,
. A( z ) = A( z ) A * ( z ) =
z − d1
( z − d1 )( z * − d1* )
2
1 − A( z ) =
2
=
( z − d1 )( z * − d1* ) − (1 − d1* z )(1 − d1z*)
( z − d1 )( z * − d1* )
2
2
2
z + d 1 − d1 z * − d1* z − 1 − d 1 z + d1z * + d1* z
( z − d1 )( z * − d1* )
⎧ > 0, if z > 1,
2⎪
2
=
2
( z − 1)(1 − d 1 )
z −d1
2
. Hence,
⎧ < 1, if z > 1,
2⎪
1 − A1 ( z ) ⎨= 0, if z = 1, Thus, A1 ( z ) ⎨= 1, if z = 1, Thus, Eq. (7.20) holds
⎪ < 0, if z < 1.
⎪ > 1, if z < 1.
⎩
⎩
for any first-order allpass function. A higher-order allpass function can br factored
into a product of first-order allpass functions. Since, Eq. (7.20) holds true each of
these factors individually, hence, it also holds true for the product.
Not for sale
177
7.3
An m –th order stable, real allpass transfer function can be expressed as a product
1 − di* z
. If di is
z − di
1 − di z
. Now,
complex, then A(z ) has another factor of the form Ai' ( z ) =
z − di*
of first-order allpass transfer functions of the form Ai ( z) =
Ai (e jω ) =
1 − d *i e jω
e
jω
− di
= e − jω
Then, Ai (e jω ) = e − jω
(1 − d *i e jω )(1 − d *i e jω )
− jω
(1 − di e
)(1 − d *i e jω )
− jθ jω 2
(1 − α e
e
)
[1 + α 2 − 2α cos(θ − ω)]
{
. Let di = di e jθ = α e jθ .
. Therefore,
}
{
}
arg{Ai (e jω )} = − ω + arg (1 − α e − jθ e jω ) 2 = − ω + 2 arg (1 − α e − jθ e jω )
⎡ α sin(θ − ω) ⎤
= − ω + 2 tan −1 ⎢
⎥. We can show similarly,
⎣1 − α cos(θ − ω) ⎦
⎡ α sin(θ + ω) ⎤
arg{ Ai' (e jω )} = − ω + 2 tan −1 ⎢
⎥.
⎣1 − α cos(θ + ω) ⎦
⎡ α sin ω ⎤
If d i = α is real, then arg{Ai (e jω )} = − ω + 2 tan −1 ⎢
⎥. Now for real di ,
⎣1 − α cos ω ⎦
arg{A i (e j 0 )} − arg{A i (e jπ )} = {−0 + 2 tan −1 (−0)} − {− π + 2 tan −1 ( −0)} = π. For
complex di , arg{A i (e j 0 )} + arg{ A i' (e j 0 )} − arg{A i (e jπ )} − arg{ A i' (e jπ )} =
⎡ α sin θ ⎤
⎡ − α sin θ ⎤
= −0 + 2 tan −1 ⎢
− 0 + 2 tan −1 ⎢
⎥
⎥
⎣ 1 − α cos θ ⎦
⎣ 1 − α cos θ ⎦
⎡ α sin θ ⎤
⎡ α sin θ ⎤
+ π − 2 tan −1 ⎢
+ π − 2 tan −1 ⎢
⎥
⎥ = 2π. Now,
⎣ 1 + α cos θ ⎦
⎣ 1 + α cos θ ⎦
d
arg{A(e jω )} . Therefore,
τ ( ω) = −
dω
(
π
π
0
0
)
jω
j0
jπ
∫ τ (ω)dω = − ∫ d[arg{A(e )}] = arg{A(e ) − arg{A(e ). Since
m
π
i =1
0
arg{A(e jω ) = ∑ arg{Ai (e jω ), it follows then ∫ τ (ω)dω = mπ.
7.4
h[ n] = a1δ[ n − 2] − a2 δ[ n − 1] − a3δ[ n] + a 4 δ[ n + 1] − a5δ[ n + 2]. Therefore,
H (e jω ) = a1e j 2 ω − a 2 e jω − a3 + a 4 e − jω − a 5 e −2 ω
= a1 (cos 2ω + j sin 2ω) − a1 (cos ω + j sin ω) − a3 + a 4 (cos ω − j sin ω)
− a3 + a 4 (cos ω − j sin ω) − a5 (cos 2ω − j sin 2ω)
= (a1 − a5 ) cos 2ω − (a2 − a4 ) cos ω − a3 + j ((a1 + a5 ) sin 2ω − (a2 + a 4 ) sin ω). To
Not for sale
178
have a zero-phase frequency response, the imaginary part of must be equal to zero
for all values of ω. Hence, for a zero-phase response, a1 = − a5 and a2 = − a4 .
7.5
v[ n] = x[ − n] O
* h[ n], and u[ n] = v[ − n] = x[ n] O
* h[ − n]. Hence,
jω
jω
jω
y[ n] = (h[ n] + h[ − n]) O
* x[ n]. Therefore, G (e ) = H (e ) + H * (e ). Thus, the
equivalent frequency response is real and has zero phase.
7.6
Now, AM ( z) = ±
z − M D*M (1 / z*)
, where
DM ( z)
D M ( z ) = 1 + d1z −1 + d 2 z −2 + L + d M z − M .
2
AM ( z ) = AM ( z ) A*M (1 / z*) =
Consider the first-order factor 1 + az −1 . Its square-magnitude function is given by
(1 + az −1 )(1 + az )
z = e jω
= (1 + a 2 ) + 2 a cos ω. We thus rewrite the given square-
magnitude function as
H (e
jω
2
) = H ( z)H ( z
−1
)
z = e jω
Therefore, H ( z )H ( z −1 ) =
=
9[1.0625 + 0.25( z + z −1 )][1.49 − 0.7( z + z −1 )]
[1.36 + 0.6( z + z −1 )][1.64 + 0.8( z + z −1 )]
9(1 + 0.25z )(1 + 0.25z −1 )(1 − 0.7 z )(1 − 0.7 z −1 )
(1 + 0.6 z )(1 + 0.6 z −1 )(1 + 0.8 z )(1 + 0.8 z −1 )
As can be seen, there are 4 possible causal, stable transfer functions:
(i) H ( z ) =
3(1 + 0.25z −1 )(1 − 0.7 z −1 )
(iii) H ( z ) =
(1 + 0.6 z −1 )(1 + 0.8 z −1 )
3(1 + 0.25z )(1 − 0.7z )
(1 + 0.6 z −1 )(1 + 0.8z −1 )
,
, (ii) H ( z ) =
(iv)
.
3(1 + 0.25z )(1 − 0.7 z −1 )
(1 + 0.6 z −1 )(1 + 0.8 z −1 )
H (z) =
.
z = e jω
,
3(1 + 0.25z −1 )(1 − 0.7 z )
(1 + 0.6 z −1 )(1 + 0.8 z −1 )
.
The zero locations of the four FIR transfer functions are given below:
(ii)
(i)
1
1.5
Imaginary Part
Imaginary Part
7.7
D *M (1 / z*) D M ( z )
⋅
= 1.
D M ( z ) D *M (1 / z*)
0.5
0
-0.5
1
0.5
0
-0.5
-1
-1.5
-1
-1
-0.5
0
0.5
Real Part
-4
1
Not for sale
-3
-2
-1
Real Part
0
1
179
(iii)
(iv)
1
1
Imaginary Part
Imaginary Part
1.5
0.5
0
-0.5
-1
0.5
0
-0.5
-1.5
-1
-4
-3
-2
-1
Real Part
0
1
-1
-0.5
0
0.5
Real Part
1
1.5
The zeros of the transfer function of a linear-phase FIR filter exhibits mirror-image
symmetry with respect to the unit circle. The zeros of the transfer function of a
minimum-phase FIR filter are all inside the unit circle and that of a maximum-phase
FIR filter are outside the unit circle.
(a) The transfer functions of (iii) and (iv) have linear-phase as their zeros exhibit
mirror-image symmetry.
(b) The transfer function of (i) is minimum-phase as its zeros are inside the unit
circle.
(c) The transfer function of (ii) is maximum-phase as its zeros are inside the unit
circle.
7.9
G( z ) = 6(1 + 1.7 z −1 − 2 z −2 )(1 − 0.5z −1 ) = 6(1 + 2.5z −1 )(1 − 0.8 z −1 )(1 − 0.5z −1 )
= 6 + 7.2 z −1 − 17.1 z −2 + 6 z −3 .
(a) Other transfer functions having the same magnitude responses are:
⎛ 2.5 + z −1 ⎞
⎟⎟
(i) G2 ( z ) = 6(1 + 2.5z −1 )(1 − 0.8z −1 )(1 − 0.5z −1 )⎜⎜
⎝ 1+ 2.5z −1 ⎠
= 6(2.5 + z −1 )(1 − 0.8 z −1 )(1 − 0.5z −1 ) = 15 − 13.5 z −1 − 1.8 z −2 + 2.4 z −3 .
⎛ − 0.8 + z −1 ⎞
(ii) G3 ( z ) = 6(1 + 2.5z −1 )(1 − 0.8z −1 )(1 − 0.5z −1 )⎜⎜
⎟⎟
⎝ 1− 0.8 z −1 ⎠
= 6(1 + 2.5z −1 )(−0.8 + z −1 )(1 − 0.5z −1 ) = −4.8 − 3.6 z −1 + 18 z −2 − 7.56 z −3 .
(iii)
⎛ − 0.5 + z −1 ⎞
⎟⎟
G4 ( z ) = 6(1 + 2.5z −1 )(1 − 0.8 z −1 )(1 − 0.5z −1 )⎜⎜
⎝ 1− 0.5z −1 ⎠
= 6(1 + 2.5z −1 )(1 − 0.8 z −1 )(−0.5 + z −1 ) = −3 + 0.9 z −1 + 16.28 z −2 − 124 z −3 .
(iv)
⎛ 2.5 + z −1 ⎞⎛ − 0.8 + z −1 ⎞
G5 ( z ) = 6(1 + 2.5z −1 )(1 − 0.8 z −1 )(1 − 0.5z −1 )⎜⎜
⎟⎟⎜⎜
⎟⎟
⎝ 1+ 2.5z −1 ⎠⎝ 1− 0.8 z −1 ⎠
= 6(2.5 + z −1 )(−0.8 + z −1 )(1 − 0.5z −1 ) = −12 + 16.2 z −1 + 0.9 z −2 − 3 z −3 .
Not for sale
180
(v)
⎛ − 0.8 + z −1 ⎞⎛ − 0.5 + z −1 ⎞
G6 ( z ) = 6(1 + 2.5z −1 )(1 − 0.8z −1 )(1 − 0.5z −1 )⎜⎜
⎟⎟⎜⎜
⎟⎟
⎝ 1− 0.8 z −1 ⎠⎝ 1− 0.5z −1 ⎠
= 6(1 + 2.5z −1 )(−0.8 + z −1 )(−0.5 + z −1 ) = 2.4 − 1.8 z −1 − 13.5 z −2 + 15 z −3 .
⎛ 2.5 + z −1 ⎞⎛ − 0.5 + z −1 ⎞
(vi) G7 ( z ) = 6(1 + 2.5z −1 )(1 − 0.8z −1 )(1 − 0.5z −1 )⎜⎜
⎟⎟⎜⎜
⎟⎟
⎝ 1+ 2.5z −1 ⎠⎝ 1− 0.5z −1 ⎠
= 6(2.5 + z −1 )(1 − 0.8 z −1 )(−0.5 + z −1 ) = −7.5 + 18 z −1 − 3.6 z −2 − 4.8 z −3 .
⎛ 2.5 + z −1 ⎞⎛ − 0.8 + z −1 ⎞⎛ − 0.5 + z −1 ⎞
(vii) G8 ( z ) = 6(1 + 2.5z −1 )(1 − 0.8z −1 )(1 − 0.5z −1 )⎜⎜
⎟⎟⎜⎜
⎟⎟⎜⎜
⎟⎟
⎝ 1+ 2.5z −1 ⎠⎝ 1− 0.8 z −1 ⎠⎝ 1− 0.5z −1 ⎠
= 6(1 + 2.5z −1 )(−0.8 + z −1 )(−0.5 + z −1 ) = −6 − 17.1 z −1 + 7.2 z −2 + 6 z −3 .
(b) The minimum phase filter is G2 ( z), as all its zeros inside the unit circle.
Likewise, the maximum phase filter is G6 ( z ), as all its zeros outside the unit circle.
(c) The partial energy of impulse responses of each of the above transfer functions
for different values of k are given by:
k=0
k=1
k=2
k=3
G1(z)
36
87.84
380.25
416.25
G2(z)
225
407.25
410.49
416.25
G3(z)
23.04
36
360
416.25
G4(z)
9
9.81
272.25
416.25
G5(z)
144
406.44
407.25
416.25
G6(z)
5.76
9
191.25
416.25
G7(z)
56.25
380.25
393.25
416.25
G8(z)
36.00
328.41
380.25
416.25
The partial energy remains the same for values of k ≥ 3. From the above table it
n
2
n
2
can be seen that ∑ g k [ m] ≤ ∑ g2 [ m] , and
∞
2
m=0
∞
m=0
2
∑ g k [ m] = ∑ g2 [ m] = 416.25, 1 ≤ k ≤ 8, where G2 ( z) is the minimum
m=0
m=0
n
2
n
2
phase transfer function. Likewise, ∑ g k [ m] ≥ ∑ g6 [ m] , 1 ≤ k ≤ 8, where
m=0
m=0
G6 ( z ) is the maximum phase transfer function.
7.9 H1 ( z ) = 1 − 0.5z −1 + 0.8z −2 − 0.4 z −3 + 0.25z −4 − 0.125z −5 + 0.2 z −6 − 0.1z −7
Not for sale
181
= (1 − 0.8z −2 )(1 + z −1 + 0.5z −2 )(1 − z −1 + 0.5z −2 )(1 − 0.5z −1 ).
H 2 ( z ) = 0.5 + 0.25z −1 + 0.4 z −2 − 0.425z −3 + 0.75z −4 − 0.75z −5 + 0.6 z −6 − 0.2 z −7
= (1 − 0.8 z −2 )(0.5 + z −1 + z −2 )(1 − z −1 + 0.5z −2 )(1 − 0.5z −1 ).
H 3 ( z ) = −0.25 + 0.25z −1 + 0.175 z −2 + 0.7 z −3 − 0.45z −4 + 0.9 z −5 − 0.6 z −6 + 0.4 z −7
= (1 − 0.8 z −2 )(0.5 + z −1 + z −2 )(1 − z −1 + 0.5z −2 )(−0.5 + z −1 ).
H 4 ( z ) = −0.5 + z −1 − 0.4 z −2 + 0.8 z −3 − 0.125z −4 + 0.25z −5 − 0.1z −6 + 0.2 z −7
= (1 − 0.8 z −2 )(1 + z −1 + 0.5z −2 )(1 − z −1 + 0.5z −2 )(−0.5 + z −1 ).
H 5 ( z ) = −0.1 + 0.2 z −1 − 0.125 z −2 + 0.25z −3 − 0.4 z −4 + 0.8 z −5 − 0.5z −6 + z −7
= (−0.8 + z −2 )(0.5 + z −1 + z −2 )(0.5 − z −1 + z −2 )(−0.5 + z −1 ) = z −7 H1 ( z −1 ).
Each factor of H1 ( z) has roots inside the unit circle. Hence, H1 ( z) is a minimumphase transfer function. Since H 5 ( z ) is a mirror-image of H1 ( z) , it has all zeros
outside the unit circle and is thus a maximum-phase transfer function.
There are 11 other length- FIR filters having the same magnitude responses as that
of the above filters.
7.11 H (e jω ) = a1 + a 2 e − jω + a3 e − j 2 ω + a 4 e − j 3ω + a 5 e − j 4 ω + a6 e − j 5ω
[
= e − j 5ω / 2 (a1e j 5ω / 2 + a6 e − j 5ω / 2 ) + (a 2 e j 3ω / 2 + a 5 e − j 3ω / 2 ) + (a3 e jω / 2 + a 4 e − jω / 2 )
−j
5ω
2 2[( a
5ω
j (a1 − a6 ) sin⎛⎜ ⎞⎟ +
⎝ 2 ⎠
ω
ω
3ω
3ω
+ (a2 + a5 ) cos⎛⎜ ⎞⎟ + j (a2 − a5 ) sin⎛⎜ ⎞⎟ + (a3 + a 4 ) cos⎛⎜ ⎞⎟ + j (a3 − a 4 ) sin⎛⎜ ⎞⎟]
⎝2⎠
⎝2⎠
⎝ 2 ⎠
⎝ 2 ⎠
=e
⎛ 5ω ⎞
1 + a6 ) cos⎜ 2 ⎟ +
⎝ ⎠
It follows from the above that H (e jω ) will have linear-phase, i.e., constant group
delay, if the imaginary parts inside the square brackets are zero. Hence, for a
constant group delay we must have a1 = a6 , a2 = a5 , and a3 = a 4 .
7.12 The frequency response of the LTI discrete-time system is given by
H (e jω ) = a1e jkω − a2 e j ( k −1)ω + a 2 e j ( k − 3)ω − a1e j ( k − 4)ω
= e − j (2 − k )ω [ a1 (e j 2ω − e − j 2ω ) + a2 (e jω − e − jω )]
= − je
− j ( 2 − k )ω
2[ a1 sin(2ω) + a2 sin ω] = − e
π
2
− j ( 2 − k − )ω
2[ a1 sin(2ω) + a 2 sin ω].
π
2
So, for k = 2 − , the system will have a frequency response that is a real function
of ω .
Not for sale
182
]
7.13 H 1(e jω ) = α + β e − jω and H 2 (e jω ) =
H (e jω ) = H 1(e jω )H 2 (e jω ) =
1
1 + γ e − jω
α + β e − jω
1 − γe − jω
. Thus,
.
α + β e − jω α + β e jω α 2 + β 2 + 2αβ cos ω
⋅
=
= K2
2
− jω
jω
1 − γe
1 − γe
1 + γ − 2 γ cos ω
2
H ( e j ω ) = H ( e jω ) H ( e − j ω ) =
if α 2 + β 2 = K 2 (1 + γ 2 ) and αβ = − K 2 γ, i.e., (α + β ) 2 = K 2 (1 − γ ) 2 .
α
7.14 Y (e jω ) = X (e jω ) e j arg X (e
jω )
. Hence, H (e jω ) =
Y ( e jω )
X (e jω )
= X ( e jω )
(α −1)
. Since
H (e jω ) is a real function of ω, it has zero phase.
(
)
7.15 H (e jω ) = h[0](1 + e − j 2ω ) + h[1]e − jω = e − jω h[0](e jω + e − jω ) + h[1]
= e − jω (2h[0] cos ω + h[1]). Thus, we require H (e j 0.3 ) = 2h[ 0] cos(0.3) + h[1] = 1
and H (e j 0.6 ) = 2h[ 0] cos(0.6) + h[1] = 0. Solving these two equations we get
h[0] = 3.8461 and h[1] = −6.3487.
7.16 (a) H (e jω ) = h[0] + h[1]e − jω − h[1]e − j 3ω − h[0]e − j 4ω
(
= e − j 2ω h[0](e j 2ω − e − j 2ω ) + h[1](e jω − e − jω )
)
= j 2e − j 2ω (h[0] sin(2ω) + h[1] sin(ω)). Therefore,
H (e jω ) = 2(h[ 0] sin( 2ω) + h[1] sin( ω)). Thus,
H (e j 0.3 ) = 2(h[0] sin(0.6) + h[1] sin(0.3)) = 0.3 and
H (e j 0.6 ) = 2(h[ 0] sin(1.2) + h[1] sin(0.6)) = 0.8. Solving these two equations we get
h[1] = −0.9873 and h[0] = 2.5686.
(b) H (e jω ) = j 2e − j 2ω (2.5686 sin(2ω) − 0.9873 sin(ω)). The plot of the magnitude
and phase responses are shown below.
7.17 (a) H (e jω ) = h[0] + h[1]e − jω − h[1]e − j 2ω − h[0]e − j 3ω
(
= e − j 3ω / 2 h[0](e j 3ω / 2 − e − j 3ω / 2 ) + h[1](e jω / 2 − e − jω / 2 )
= j 2e − j 3ω / 2 (h[0] sin(3ω / 2) + h[1] sin(ω / 2)). Therefore,
)
H (e jω ) = 2(h[ 0] sin(3ω / 2) + h[1] sin(ω / 2)). Thus,
Not for sale
183
H (e j 0.25 ) = 2(h[ 0] sin(0.375) + h[1] sin( 0.125)) = 0.2 and
H (e j 0.8 ) = 2(h[0] sin(1.2) + h[1] sin(0.4)) = 0.8. Solving these two equations we get
h[1] = 6.2573 and h[0] = −1.8569.
(b) H (e jω ) = j 2e − j 3ω / 2 (− 1.8569 sin(3ω / 2) + 6.2573 sin(ω / 2)).
7.18 (a) H (e jω ) = h[0] + h[1]e − jω + h[2]e − j 2 ω + h[1]e − j 3ω + h[0]e − j 4ω
(
)
= e − j 2ω h[0](e j 2ω + e − j 2ω ) + h[1](e jω + e − jω ) + h[2]
=e
− j 2ω
(2h[0] cos(2ω) + 2h[1] cos ω + h[2]) .
Therefore,
H (e jω ) = 2h[ 0] cos(2ω) + 2h[1] cos ω + h[ 2]. Thus,
H (e j 0.3 ) = 2 h[0] cos(0.6) + 2 h[1] cos(0.3) + h[2] = 1,
H (e j 0.5 ) = 2 h[0] cos(1.0) + 2 h[1] cos(0.5) + h[2] = 0, and
H (e j 0.8 ) = 2 h[0] cos(1.6) + 2 h[1] cos(0.8) + h[2] = 1. Solving these three equations
we get h[0] = 17.7761, h[1] = −58.7339 , and h[2] = 83.8786 .
(b) H (e jω ) = e − j 2ω (35.5522 cos(2ω) − 117.4677 cos ω + 83.8786 ). The plot of the
magnitude and phase responses are shown below.
4
Phase, in radians
2
Magnitude
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
ω
2
0
-2
-4
0
0.5
1
1.5
2
2.5
3
ω
7.19 H (e j 0 ) = 13, H (e j 3π / 4 ) = −3 − j 4, and H (e jπ ) = −3. Using the symmetry
property of the DTFT of a real sequence, we observe
H (e jπ / 4 ) = H * (e j 3π / 4 ) = −3 + j 4. Thus, the 4 –point DFT H [k ] of the length- 4
Not for sale
184
sequence {h[n]} is given by {H[ k ]} = {13, − 3 + j 4, − 3, − 3 − j 4}. Its 4 –point
1
1 ⎤ ⎡ 13 ⎤ ⎡ 1 ⎤
⎡h[0]⎤
⎡1 1
⎢ h[1] ⎥
⎢1 j − 1 − j ⎥ ⎢ − 3 + j 4⎥ ⎢ 2 ⎥
⎥= 1⎢
⎥⎢
⎥ = ⎢ ⎥.
inverse DFT is thus given by ⎢
⎢h[2]⎥ 4 ⎢1 − 1 1 − 1⎥ ⎢ − 3 ⎥ ⎢ 4 ⎥
⎢
⎥
⎢
⎥⎢
⎥ ⎢ ⎥
⎣ h[3]⎦
⎣1 − j − 1 j ⎦ ⎣ − 3 − j 4 ⎦ ⎣6 ⎦
Hence, H ( z ) = 1 + 2 z −1 + 4 z −2 + 6 z −3 .
7.20 Now, for a real, anti-symmetric sequence {h[ n]} of even length, H (e j 0 ) = 0.
Using the symmetry property of the DTFT of a real sequence, we observe also
H (e jπ / 4 ) = H * (e j 3π / 4 ) = −5 + j 5. Hence, the 4 –point DFT of the length- 4
sequence {h[ n]} is given by {H[ k ]} = {0, − 5 + j 5, 20, − 5 − j 5}. Its 4 –point
⎡h[0]⎤
1
1 ⎤ ⎡ 0 ⎤ ⎡ 2 .5 ⎤
⎡1 1
⎢ h[1] ⎥ 1 ⎢1 j − 1 − j ⎥ ⎢− 5 + j 5⎥ ⎢− 7.5⎥
inverse DFT is thus given by ⎢
=
.
=
h[2]⎥ 4 ⎢1 − 1 1 − 1⎥ ⎢ 20 ⎥ ⎢− 2.5⎥
⎢ h[3]⎥
⎢⎣1 − j − 1 j ⎥⎦ ⎢⎣ − 5 − j 5⎥⎦ ⎢⎣ 7.5 ⎥⎦
⎦
⎣
Hence, H ( z ) = 2.5 − 7.5 z −1 − 2.5 z −2 + 7.5 z −3 .
7.21 (a) H A (e jω ) = 0.5 − e − jω + 0.5e − j 2ω = e − jω (cos ω − 1) and
H B (e jω ) = 0.5 + e − jω + 0.5e − j 2ω = e − jω (cos ω + 1). Hence,
H A (e jω ) = cos ω − 1 and H B (e jω ) = cos ω + 1 . Plots of these two magnitude
functions is given below:
jω
jω
HB(e )
2
2
1.5
1.5
Magnitude
Magnitude
HA(e )
1
0.5
0.5
0
1
0
0.2
0.4
0.6
0.8
1
0
0
0.2
0.4
0.6
0.8
1
ω/ π
ω/ π
As can be seen from the above plots, h A [n] is a highpass filter and hB [n] is a
lowpass filter.
(b) hC [ n] = ( −1) n h A [ n] = h B [ n]. Hence, H C (e jω ) = H A (e j (ω + π ) ) = H B (e jω ).
HC (e jω ) is a shifted version of H A (e jω ) shifted by π radians.
Not for sale
185
7.22 h[ n] = h[ N − n]. Thus,
N −1
N −1
N −1
n=0
n=0
k =0
H ( z ) = ∑ h[ n]z − n = ∑ h[ N − n]z − n = ∑ h[ k ]z − ( N − k ) = z − N H ( z −1 ). As
H ( z ) has zeros in a mirror-image symmetry in the z –plane, G ( z ) = 1 / H ( z ) will
have poles outside the unit circle making it unstable.
7.23 (a) Since H ( z ) is a minimum-phase FIR transfer function, any other FIR transfer
function G ( z ) with the same magnitude response as that of H ( z ) can be expressed
as G ( z ) = H ( z ) A( z ) where A( z ) is an allpass function. Now, g[ 0] = lim G ( z ).
z→∞
Thus, g[0] = | lim G( z) |= | lim H ( z) A( z) |= | lim H ( z) | ⋅ | lim A( z ) |
z→∞
z →∞
z →∞
z→∞
≤ | lim H ( z ) |, as | lim A( z ) | < 1 (see Eq. (7.20)). Hence, g[0] ≤ h[0] .
z→∞
z→∞
(b) If λ1 is a zero of H ( z ), then λ1 < 1, since H ( z ) is a minimum-phase causal
stable transfer function with all zeros inside the unit circle. Let
H ( z ) = B( z )(1 − λ1 z −1 ). It follows that is also a minimum-phase causal transfer
function.
⎛ λ* − z −1 ⎞
⎟. If
Now, consider the transfer function F ( z) = B( z )( λ*1 − z −1 ) = H ( z )⎜ 1
⎜ 1 − λ z −1 ⎟
1
⎝
⎠
h[ n], b[ n], and f [ n] denote, respectively, the inverse –transform of H ( z ), B( z ), and
F ( z ), then we get
⎧⎪
b[0],
n = 0,
⎧
λ*1b[0],
n = 0,
h[ n] = ⎨
and f [ n] = ⎨ *
⎪⎩ λ1b[ n] − b[ n − 1], n ≥ 1.
⎩b[ n] − λ1b[ n − 1], n ≥ 1,
Consider
m
2
m
2
2
ε = ∑ h[ n] − ∑ f [ n] = b[0] − λ*1
n=0
2
h[ n] =
2
f [ n] =
Hence, ε
2
n=0
2
m
2
m
2
b[0] + ∑ h[ n] − ∑ f [ n] . Now,
n =1
n =1
2
2
2
b[ n] + λ1 b[ n − 1] − λ1 b[ n − 1]b * [ n] − λ*1 b * [ n − 1]b[ n], and
2
2
2
λ1 b[ n] + b[ n − 1] − λ1 b[ n − 1]b * [ n] − λ*1b * [ n − 1]b[ n].
m
2
2
2
2
2
2
= b[0] − λ1 b[0] + ∑ ⎛⎜ b[ n] − λ1 b[ n − 1] ⎞⎟
⎝
⎠
n =1
m
2
2
2
2
2
− ∑ ⎛⎜ λ1 b[ n] − b[ n − 1] ⎞⎟ = ⎛⎜ 1 − λ1 ⎞⎟ b[ m] .
⎝
⎠
⎝
⎠
n =1
m
m
m
m
2
2
2
2
Since λ1 < 1, ε > 0, i.e., ∑ h[ n] > ∑ f [ n] . Hence, ∑ h[ n] ≥ ∑ g[ n] .
n=0
n=0
Not for sale
n=0
n=0
186
7.24 (a) H1 ( z ) =
z 3 + 3z 2 + 2 z + 7
(2 z + 3)( z 2 + 0.5 z + 0.8)
=
( z + 3.0867)( z 2 − 0.0867 z + 2.2678)
(2 z + 3)( z 2 + 0.5 z + 0.8)
has a pole at
3
2
z = − , which is outside the unit circle. Hence, H1 ( z) is not a stable transfer
function. To arrive at a stable transfer function with an identical magnitude
2z+3
resulting in
response, we multiply H1 ( z) with the allpass function
2 + 3z
z 3 + 3z 2 + 2 z + 7
2z + 3
z 3 + 3z 2 + 2 z + 7
.
=
(2 z + 3)( z 2 + 0.5 z + 0.8) 2 + 3 z (2 + 3 z )( z 2 + 0.5 z + 0.8)
(b) H 2 ( z ) =
⋅
4 z 3 − 2 z 2 + 5z − 6
(1.5 z 2 + 3 z − 5)( z 2 − 0.3 z + 0.7)
=
4( z 2 + 0.4181+ 1.6338)( z − 0.9181)
1.5( z + 3.0817)( z −1.0817)( z 2 − 0.3 z + 0.7)
has
two poles outside the unit circle at z = −3.0817 and z = 1.0817 . Hence, H 2 ( z) is
not a stable transfer function. To arrive at a stable transfer function with an
identical magnitude response, we multiply H 2 ( z) with the allpass function
z 2 − 0.3 z + 0.7
0 .7 z 2 − 0 .3 z + 1
=
resulting in
4 z 3 − 2 z 2 + 5z − 6
⋅
z 2 − 0.3 z + 0.7
(1.5z 2 + 3z − 5)( z 2 − 0.3z + 0.7) 0.7 z 2 − 0.3 z + 1
4 z 3 − 2 z 2 + 5z − 6
(5 z 2 + 3 z −1.5)( z 2 − 0.3z + 0.7)
.
7.25 The transfer function of the simplest notch filter is given by
H ( z ) = (1 − e jωo z −1 )(1 − e − jωo z −1 ) = 1 − 2 cos(ωo ) z −1 + z − 2 . In the steady-state,
the output for an input x[ n] = cos(ωo n) is given by y[ n] = H (e
where θ (ωo ) = arg[ H (e
jω o
jω o
) cos(ωo n + θ (ωo ))
)].
(a) Comparing H ( z ) = 1 − z −1 + z −2 with H ( z ) as given above we conclude
cos(ωo ) = , or ωo = . Here, H1 (e jω o ) = 1 − e − jω o + e − j 2ω o
2
3
π
1
= 1 − e − jπ / 3 + e − j 2π / 3 = 1 − (0.5 + j 0.866) + (−0.5 + j 0.866) = 0.
Hence, y[ n] = H1 (e jωo ) cos(ωo n + θ (ωo )) = 0.
(b) Comparing H 2 ( z ) = 1 − 0.8 z −1 + z −2 with H ( z ) as given above we conclude
cos(ωo ) = 0.4 or ωo = 0.369π. Here,
H 2 (e jω o ) = 1 − e − jω o + e − j 2ω o = 1 − (0.32 + j 0.7332 ) + (−0.68 + j 0.7332 ) = 0.
Hence, y[ n] = H 2 (e
jω o
) cos(ωo n + θ (ωo )) = 0. .
Not for sale
187
(c) Comparing H 3 ( z ) = 1 − 1.6 z −1 + z −2 with H ( z ) as given above we conclude
cos(ωo ) = 0.8 or ωo = 0.2048π. Here,
H 2 (e jω o ) = 1 − e − jω o + e − j 2ω o = 1 − (1.2891 + j 0.9599 ) + (0.2801 + j 0.9599 ) = 0.
Hence, y[ n] = H 3 (e
jω o
) cos(ωo n + θ (ωo )) = 0.
Y (z)
Y (z)
7.26 From the figure, H 0 ( z ) = 0
= G L ( z )G H ( z 2 ), H1 ( z ) = 1
= G H ( z )G H ( z 2 ),
X ( z)
X ( z)
Y ( z)
Y ( z)
H 2 ( z) = 2
= G H ( z )G L ( z 2 ), H 3 ( z ) = 3
= G L ( z )G L ( z 2 ).
X ( z)
X (z)
For the magnitude responses of G L (z) and G H (z) shown below
GH(e jω)
G L(e jω)
1
1
0
π/4
0
π/2
π
ω
0
π/2
0
2
3π/4
π
ω
the magnitude responses of G L ( z 2 ) and G H ( z ) are as shown below
G L(e
j2ω
GH(e j2ω )
)
1
1
0
π/4
0
π/2
π
ω
0
π/2
0
3π/4
π
ω
Hence, the magnitude responses of the casacaded filters H i ( z ), 0 ≤ i ≤ 3, are as indicated
below:
H 0(e jω )
H 1(e jω )
1
1
0
0
π/4
π/2
π
ω
π/2
0
3π/4
π
ω
H 3(e jω )
H 2(e jω )
1
1
0
0
0
π/4
π/2
π
ω
0
Not for sale
0
π/4
π/2
π
ω
188
⎧1, 0 ≤ ω < ωc ,
7.27 G(e jω ) = H LP (e j (π − ω) ). Since, H LP (e jω ) = ⎨
⎩0, ωc ≤ ω < π,
⎧0, 0 ≤ ω < π − ωc ,
G ( e jω ) = ⎨
Hence, G(e jω ) is a highpass filter with a cutoff
−
≤
<
1
,
π
ω
ω
π
.
c
⎩
frequency given by ω o = π − ω c . Also, since G( z) = H LP (− z), we have
g[ n] = (−1) n hLP [ n].
7.28 G( z ) = H LP (e jωo z ) + H LP (e − jωo z ). Hence, g[ n] = hLP [ n]e − jωo n + hLP [ n]e jωo n
= 2 h LP [ n ] cos( ω o n ). Thus, G ( z ) is a real coefficient bandpass filter with
a center frequency at ωo and a passband width of 2ω p .
7.29 F ( z ) = H LP (e jωo z ) + H LP (e − jωo z ) + H LP ( z ). Hence,
f [ n] = (1 + 2 cos(ωo n))hLP [ n]. Thus, F ( z ) is a real coefficient bandstop filter with
a center frequency at ωo and a stopband width of (π − 3ω p ) / 2.
7.30
V(z)
+
X(z)
hLP[n]
U(z)
+
Y(z)
( _1)n
( _1)n
From the above figure, we get V ( z) = X (− z), U ( z) = H LP ( z) X (− z), and
Y ( z)
Y ( z) = U (− z) = H LP (− z) X ( z). Hence, H eq ( z ) =
= H LP (− z ), which is the
X (z)
highpass filter of Problem 7.27.
7.31
2
V 0(z)
cos(ωo n) +
cos(ωo n)
+
U1 (z)
2
hLP[n]
Y(z)
V 1(z)
+
X(z)
hLP[n]
+
+
U0 (z)
sin(ωo n)
sin(ωo n)
From the above figure, we have u0 [ n] = 2 x[ n] cos(ωo n) = x[ n] e jω o n + x[ n] e − jω o n
or, U 0 (e jω ) = X (e j (ω + ω o ) ) + X (e j (ω − ω o ) ). Likewise,
U1 (e jω ) = j X (e j (ω + ω o ) ) − j X (e j (ω − ω o ) ). We also have
Not for sale
189
V0 ( z ) = H LP ( z ) X ( z e jω o ) + H LP ( z ) X ( z e − jω o ), and
V1 ( z ) = j H LP ( z ) X ( z e jω o ) − j H LP ( z ) X ( z e − jω o ). Therefore,
Y ( z) =
1
2
(V (z e
0
jω o
) (V (z e
) + V0 ( z e − jω o ) + j
1
2
1
jω o
)
) − V1 ( z e − jω o ) , which after
simplification yields
{H LP (z e jωo ) X (z e j 2ωo ) + H LP (z e jωo ) X (z) + H LP (z e − jωo ) X (z)
1
+ H LP ( z e − jω o ) X ( z e − j 2ω o )} − {H LP ( z e jω o ) X ( z e j 2ω o ) − H LP ( z e jω o ) X ( z )
4
− jω o
− jω o
+ H LP ( z e
) X ( z ) + H LP ( z e
) X ( z e − j 2ω o )}. Hence,
Y ( z) =
1
4
Y ( z) =
1
2
{H
H eq ( z ) =
1
2
LP ( z e
{H
jω o
LP ( z e
}
) + H LP ( z e − jω o ) X ( z ). Therefore,
jω o
}
) + H LP ( z e − jω o ) . Thus, the structure of Figure P7.4
implements the bandpass filter of Problem 7.28.
7.32
Not for sale
190
|H 0(e jω )|
π 0 __
π
_ __
M
M
|H 1(e jω )|
0
2π
__
M
π
2π
π
2π
π
2π
π
2π
ω
ω
|H 2(e jω )|
0
4π
__
M
ω
|HM _ 1(e jω )|
_ 2π
__
M
0
2( M _ 1)π
_____
M
ω
The output of the k –th filter is a bandpass signal occupying a bandwidth of 2π / M
and centered at ω = kπ / M. In general, the k –th filter H k (z ) has a complex
impulse response generating a complex output sequence. To realize a real
coefficient bandpass filter, one can combine the outputs of H k (z ) and H M − k (z ).
7.33 H 0 ( z ) = (1 + z −1 ). Thus, H 0 (e jω ) = cos(ω / 2). Now, G ( z ) = (H 0 ( z )) M .
1
2
2
Hence, G(e jω ) = H 0 (e jω )
2M
= (cos(ω / 2))2 M . The 3 –dB cutoff frequency
ωc of G ( z ) is thus given by (cos(ωc / 2))2 M = . Hence, ωc = 2 cos −1 (2 −1 / 2 M ).
1
2
2
7.34 H1 ( z ) = (1 − z −1 ). Thus, H1 (e jω ) = sin 2 (ω / 2). Let, F ( z ) = (H 0 ( z )) M . Then,
2
1
2
F (e jω ) = (sin(ω / 2))2 M . The 3 –dB cutoff frequency ωc of F ( z ) is thus given
Not for sale
191
by (sin(ωc / 2))2 M = , which yields, ωc = 2 sin −1 (2 −1 / 2 M ).
2
1
7.35 H LP ( z ) =
1 − α ⎛⎜ 1 + z −1 ⎞⎟
. Note that H LP (z) is stable if α < 1. Now,
2 ⎜⎝ 1 − αz −1 ⎟⎠
1 − sin(ωc ) cos 2 (ωc / 2) + sin 2 (ωc / 2) − 2 sin(ωc / 2) cos(ωc / 2)
α=
=
cos(ωc )
cos 2 (ωc / 2) − sin 2 (ωc / 2)
=
cos(ωc / 2) − sin(ωc / 2) 1 − tan(ωc / 2)
=
.
cos(ωc / 2) + sin(ωc / 2) 1 + tan(ωc / 2)
(7-a)
If 0 ≤ ω < π, then tan(ωc / 2) ≥ 0. Hence, α < 1.
7.36 From Eq. (7-a), α =
1 − tan(ωc / 2)
1− α
. Hence, tan(ωc / 2) =
.
1+ α
1 + tan(ωc / 2)
1 − sin(0.6)
= 0.5275. Substituting this value of α
cos(0.6)
⎛
⎞
1 + z −1
⎟.
in Eq.(7.71), we arrive at H LP ( z ) = 0.2363⎜
⎜ 1 − 0.5275 z −1 ⎟
⎝
⎠
7.37 (a) From Eq.(7.73b), we get α =
1 − sin(0.45)
= 0.0787. Substituting this value of
cos(0.45)
⎛
⎞
1 + z −1
⎟.
α in Eq.(7.71), we arrive at H LP ( z ) = 0.4607⎜
⎜ 1 − 0.0787 z −1 ⎟
⎝
⎠
1 + α ⎛⎜ 1 − z −1 ⎞⎟
1 + α ⎛⎜ 1 − e − jω ⎞⎟
7.38 H HP ( z ) =
. Thus, H HP (e jω ) =
. Thus,
2 ⎜⎝ 1 − αz −1 ⎟⎠
2 ⎜⎝ 1 − αe − jω ⎟⎠
2 ⎛ 1 + α ⎞2 ⎛
2 − 2 cos(ω) ⎞⎟
H HP (e jω ) = ⎜
. At –dB cutoff frequency ωc ,
⎟ ⎜⎜
⎝ 2 ⎠ ⎝ 1 + α 2 − 2α cos(ω) ⎟⎠
2
1
2α
H HP (e jωc ) = which yields cos(ωc ) =
.
2
1 + α2
1 − sin(0.6)
7.39 (a) From Eq.(7.73b), we get α =
= 0.5275. Substituting this value of
cos(0.6)
⎛ 1 + z −1
⎞
⎟.
α in Eq.(7.74), we arrive at H HP ( z ) = 0.7637⎜
⎜ 1 − 0.5275z −1 ⎟
⎝
⎠
1 − sin(0.45)
(b) From Eq.(7.73b), we get α =
= 0.0787. Substituting this value of
cos(0.45)
(b) From Eq.(7.73b), we get α =
Not for sale
192
⎛ 1 + z −1
⎞
⎟.
α in Eq.(7.74), we arrive at H HP ( z ) = 0.5394⎜
⎜ 1 − 0.0787 z −1 ⎟
⎝
⎠
7.40 H ( z) =
1 − z −1
1 − kz
−1
(1 − cos ω) 2 + sin 2 ω
2
. Hence, H (e jω ) =
2
Now, H (e jπ ) =
4
(1 + k ) 2
2
2
2
(1 − k cos ω) + k sin ω
=
2 − 2 cos ω
1 + k 2 − 2 k cos ω
. Thus, the scaled transfer function is given by
1 + k ⎛⎜ 1 − z −1 ⎞⎟
. A plot of the magnitude responses of the scaled transfer
H (z) =
2 ⎜⎝ 1 − kz −1 ⎟⎠
function for k = 0.95, 0.9, and − 0.5 are given below:
1
←k=0.95
←k=0.9
Magnitude
0.8
k=-0.5→
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/pi
7.41 H BP ( z ) =
⎞
1 − α ⎛⎜
1 − z−2
⎟. Thus,
2 ⎜⎝ 1 − β (1 + α )z −1 + αz − 2 ⎟⎠
H BP (e jω ) =
H BP (e jω )
=
2
⎞
1 − α ⎛⎜
1 − e − j 2ω
⎟. Hence,
2 ⎜⎝ 1 − β (1 + α )e − jω + αe − j 2ω ⎟⎠
=
(1 − α ) 2
2(1 − 2 cos(2ω))
⋅
2
1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos(ω)
(1 − α) 2 sin 2 ω
(1 + α) 2 (cos ω − β) 2 + (1 − α ) 2 sin 2 ω
. At the center frequency ω o ,
2
H BP (e jωo ) = 1. Hence, (cosω o − β ) 2 = 0 or cosω o = β.
2
At the 3 –dB bandedges ω1 and ω2 , H BP (e jωi ) = , i = 1, 2. This imples
(1 + α ) 2 (cos ωi − β) 2 = (1 − α ) 2 sin 2 ωi ,
1
2
(7-c)
⎛1+ α ⎞
or, sin ωi = ±⎜
⎟ (cos ωi − β), i = 1, 2. Since, ω1 < ωo < ω2 , sin ω1 must have
⎝1− α ⎠
positive sign and sin ω2 must have negative sign, because otherwise, sin ω2 < 0
Not for sale
193
.
for ω2 in (0, π). Now, Eq. (7-c) can be rewritten as
2(1 + α 2 ) cos 2 ωi − 2β(1 + α) 2 cos ωi + β 2 (1 + α) 2 − (1 − α 2 ) = 0. Hence,
(1 + α) 2
β 2 (1 + α) 2 − (1 − α) 2
, and (cos ω1 )(cos ω2 ) =
.
2(1 + α 2 )
1 + α2
Denote ω3dB = ω2 − ω1. Then cos ω3dB = cos ω2 cos ω1 + sin ω2 sin ω1
cos ω1 + cos ω2 = β
2
(
)
2α
⎛1+ α ⎞
2
.
= cos ω2 cos ω1 − ⎜
⎟ cos ω2 cos ω1 + β (cos ω2 + cos ω1 ) =
⎝1− α ⎠
1 + α2
7.42 (a) Using Eq.(7.76), we get β = cos( 0.55π) = −0.1564 . Next, from Eq.(7.78), we
2α
get
= cos(0.25π) = 0.7071, or, equivalently, 0.7071α 2 − 2α + 0.7071 = 0.
2
1+ α
Solution of this quadratic equation yields α = 2.4142 and α = 0.4142.
Substituting α = 2.4142 and β = −0.1564 . in Eq.(7.77) we arrive at the
denominator polynomial of the transfer function H BP (z) as
D( z ) = 1 + 0.5340 z −1 + 2.4142 z −2 . Comparing with Eq. (7.136) we note
d1 = 0.5340 and d 2 = 2.4142. Since the condition of Eq. (7.139) is not satisfied,
the corresponding H BP (z) is unstable.
Substituting α = 0.4142 and β = −0.1564 . in Eq.(7.77) we arrive at the
denominator polynomial of the transfer function H BP (z) as
D( z ) = 1 + 0.2212 z −1 + 0.4142 z −2 . Comparing with Eq. (7.136) we note
d1 = 0.2212 and d 2 = 0.4142. Since the conditions of Eqs. (7.139) and (7.141) are
satisfied, the corresponding H BP (z) is a stable transfer function. Hence, the desired
transfer function is H BP ( z) =
0.2929(1 − z −2 )
1 + 0.2212 z −1 + 0.4142 z − 2
.
(b) Using Eq.(7.76), we get β = cos( 0.3π) = 0.5878 . Next, from Eq.(7.78), we get
2α
= cos(0.3π) = 0.5878, or, equivalently, 0.5878 α 2 − 2α + 0.5878 = 0.
2
1+ α
Solution of this quadratic equation yields α = 3.0766 and α = 0.3249.
Substituting α = 3.0766 and β = 0.5878. in Eq.(7.77) we arrive at the denominator
polynomial of the transfer function H BP (z) as D( z ) = 1 + 2.3968 z −1 + 0.788 z −2 .
Comparing with Eq. (7.136) we note d1 = 2.3968 and d 2 = 0.788. Since the
condition of Eq. (7.141) is not satisfied, the corresponding H BP (z) is unstable.
Substituting α = 0.3249 and β = 0.5878. in Eq.(7.77) we arrive at the denominator
polynomial of the transfer function H BP (z) as D( z ) = 1 + 0.7788 z −1 + 0.3249z −2 .
Not for sale
194
Comparing with Eq. (7.136) we note d1 = 0.2212 and d 2 = 0.4142. Since the
conditions of Eqs. (7.139) and (7.141) are satisfied, the corresponding H BP (z) is a
stable transfer function. Hence, the desired transfer function is
0.3376(1 − z −2 )
H BP ( z ) =
.
1 + 0.7788z −1 + 0.3249z − 2
1 + α ⎛⎜ 1 − 2βz −1 + z − 2
7.43 H BS ( z ) =
2 ⎜⎝ 1 − β(1 + α)z −1 + αz − 2
H BS (e
=
jω
⎞
⎟. Thus,
⎟
⎠
2
2 + 4β 2 − 8β cos(ω) + 2 cos(2ω)
⎛1+ α ⎞
) =⎜
⎟ ⋅
⎝ 2 ⎠ 1 + β 2 (1 + α) 2 + α 2 + 2α cos(2ω) − 2β(1 + α) 2 cos(ω)
2
(1 + α) 2 (cos ω − β) 2
(1 + α) 2 (cos ω − β) 2 + (1 − α ) 2 sin 2 ω
. At the center frequency ω o ,
2
H BS (e jωo ) = 0. Hence, (cosω o − β ) 2 = 0 or cosω o = β. At the 3 –dB
2
bandedges ω1 and ω2 , H BP (e jωi ) = , i = 1, 2. This leads to Eq. (7-c) given in
2
the solution of Problem 7.41. Hence, as in the solution of Problem 7.41,
2α
.
ω3dB =
1 + α2
1
7.44 (a) Using Eq.(7.76), we get β = cos( 0.35π) = 0.454 . Next, from Eq.(7.78), we get
2α
= cos(0.2 π) = 0.809, or, equivalently, 0.809 α 2 − 2α + 0.809 = 0. Solution
2
1+ α
of this quadratic equation yields α = 1.9627 and α = 0.3249. Substituting
α = 1.9627 and β = 0.454 in Eq.(7.80) we arrive at the denominator polynomial of
the transfer function H BS (z ) as D( z ) = 1 − 1.3451 z −1 + 1.9627 z −2 . Since the
condition of Eq. (7.139) is not satisfied, the corresponding H BS (z ) is unstable.
Substituting α = 0.3249 and β = 0.454 in Eq.(7.80) we arrive at the denominator
polynomial of the transfer function H BS (z ) as D( z ) = 1 + 0.6015 z −1 + 0.3249 z −2 . Since
the conditions of Eqs. (7.139) and (7.141) are satisfied, the corresponding H BS (z ) is a
stable transfer function. Hence, the desired transfer function is
H BS ( z ) =
0.6624(1 − 0.908 z −1 + z −2 )
1 + 0.6015 z −1 + 0.3249 z − 2
.
(b) Using Eq.(7.76), we get β = cos( 0.6 π) = −0.309. Next, from Eq.(7.78), we get
2α
= cos(0.15π) = 0.891, or, equivalently, 0.891α 2 − 2α + 0.891 = 0. Solution
2
1+ α
Not for sale
195
of this quadratic equation yields α = 1.6319 and α = 0.6128 .
Substituting α = 1.6319 and β = −0.309 in Eq.(7.80) we arrive at the denominator
polynomial of the transfer function H BS (z ) as D( z ) = 1 + 2.345 z −1 + 1.6319 z −2 .
Since the condition of Eq. (7.139) is not satisfied, the corresponding H BS (z ) is
unstable.
Substituting α = 0.6128 and β = −0.309 in Eq.(7.80) we arrive at the denominator
polynomial of the transfer function H BS (z ) as D( z ) = 1 + 0.4974 z −1 + 0.6128 z −2 .
Since the conditions of Eqs. (7.139) and (7.141) are satisfied, the
corresponding H BS (z ) is a stable transfer function. Hence, the desired transfer
function is H BS ( z ) =
7.45
0.564(1 + 0.618 z −1 + z −2 )
1 + 0.4984 z −1 + 0.6128 z − 2
(1 − α) 2 (1 + cos ωc )
2
2(1 + α − 2α cos ωc )
.
= 2 −1 / K . Let C = 2 ( K −1) / K . Simplifying the first equation
we then get α 2 (cosωc +1 − C ) − 2α(1 + cosωc −C cosωc ) + 1 + cosωc −C = 0.
Solving the quadratic equation for α we obtain
α=
=
=
2(1 + (1 − C ) cos ωc ) ± 4(1 + (1 − C ) cos ωc )2 − 4(1 + cos ωc − C ) 2
(1 + (1 − C ) cos ωc ) ±
2(1 + cos ωc − C )
(2 + 2 cos ωc − C − C cos ωc )(C (1 − cos ωc ) )
1 + cos ωc − C
1 + (1 − C ) cos ωc ± sin ωc 2C − C 2
. For stability we require α < 1, hence the
1 + cos ωc − C
desired solution is α =
1 + (1 − C ) cos ωc − sin ωc 2C − C 2
.
1 + cos ωc − C
2
2 ⎛ 1 + α ⎞ 2 1 − e − jω
1 + α ⎛⎜ 1 − z −1 ⎞⎟
. H HP (e jω ) = ⎜
7.46 H HP ( z ) =
.
⎟
2 ⎜⎝ 1 − αz −1 ⎟⎠
⎝ 2 ⎠ 1 − α e − jω
H HP (e
jω
)
2K
⎛1+ α ⎞
=⎜
⎟
⎝ 2 ⎠
2K
1 − e − jω
1 − αe
2K
− jω
the –dB cutoff frequency ωc , H HP (e jω c )
⎛1+ α ⎞
=⎜
⎟
⎝ 2 ⎠
2K
2K
2 K (1 − cos ω) K
2
(1 + α − 2α cos ω)
K
. At
= . Let C = 2 ( K −1) / K .
1
2
Simplifying the above equation we get
α 2 (1 − cosωc −C ) − 2α(1 − cosωc +C cosωc ) + 1 − cosωc −C = 0. Solving the
quadratic equation for α we obtain
Not for sale
196
α=
− 2(1 − cos ωc + C cos ωc ) ± 2 (1 − cos ωc + C cos ωc ) 2 − (1 − cos ωc − C ) 2
2(1 − cos ωc − C )
.
For stability we require α < 1, hence the desired solution is
sin ωc 2C − C 2 − (1 − cos ωc + C cos ωc )
.
α=
1 − cos ωc − C
K
1
7.47 (a) Analyzing Figure P7.6(a) we get Y ( z ) = ⎡ (1 + A1 ( z )) + (1 − A1 ( z ))⎤ X ( z ).
⎢⎣ 2
⎥⎦
2
Y (z) ⎛ 1 + K ⎞ ⎛ 1 − K ⎞
Hence, H ( z ) =
=⎜
⎟+⎜
⎟A1 ( z ).
X (z) ⎝ 2 ⎠ ⎝ 2 ⎠
⎛1+ K ⎞
⎛1− K ⎞
(b) Analyzing Figure P7.6(b) we get Y ( z ) = ⎜
⎟ X ( z) + ⎜
⎟A1 ( z ) X ( z ).
⎝ 2 ⎠
⎝ 2 ⎠
Y (z) ⎛ 1 + K ⎞ ⎛ 1 − K ⎞
Hence, H ( z ) =
=⎜
⎟+⎜
⎟A1 ( z ).
X (z) ⎝ 2 ⎠ ⎝ 2 ⎠
K
7.48 (a) Analyzing Figure P7.6(a) we get Y ( z ) = X ( z ) + (1 + A1 ( z ))X ( z ).
2
Y ( z) ⎛ 1 + K ⎞ ⎛ K ⎞
Therefore, H ( z ) =
=⎜
⎟ + ⎜ ⎟A1 ( z ).
X ( z) ⎝ 2 ⎠ ⎝ 2 ⎠
K
(b) Analyzing Figure P7.6(b) we get Y ( z ) = X ( z ) + (1 − A1 ( z ))X ( z ). Therefore,
2
Y ( z) ⎛ 1 + K ⎞ ⎛ K ⎞
=⎜
H ( z) =
⎟ − ⎜ ⎟A1 ( z ).
X ( z) ⎝ 2 ⎠ ⎝ 2 ⎠
7.49 H (e
jω
⎧1, ω p1 ≤ ω ≤ ω p2 ,
⎪
) = ⎨0,
G(e jω ) = H (e j ( π − ω) ), This implies that the
0 ≤ ω ≤ ω s1 ,
⎪0,
ω s 2 ≤ ω < π.
⎩
frequency response of H ( − z ) is a shifted version of the frequency response of
H ( z ) , shifted by π radians. Therefore,
⎧1, π − ω p2 ≤ ω ≤ π − ω p1,
⎪
) = ⎨0,
G ( e jω ) = H ( e
Hence, H (− z ) is also a
0 ≤ ω ≤ π − ωs 2 ,
⎪0,
π − ωs1 ≤ ω < π.
⎩
bandpass filter with passband edges at π − ω p2 and π − ω p1 , and stopband edges at
j ( π − ω)
π − ω s 2 and π − ω s1 with π − ωs 2 < π − ω p1 < π − ω p1 < π − ωs1.
1 − α ⎛⎜ 1 + z −1 ⎞⎟
1 − α ⎛⎜ 1 − z −1 ⎞⎟
, G HP ( z) =
. Let β = − α. Then,
7.50 H LP ( z) =
2 ⎜⎝ 1 − αz −1 ⎟⎠
2 ⎜⎝ 1 + αz −1 ⎟⎠
Not for sale
197
G HP ( z) =
1 + β ⎛⎜ 1 − z −1 ⎞⎟
. Therefore, ωc = cos −1 ( β ) = cos −1 (− α ).
−
1
⎜
⎟
2 ⎝ 1 − βz ⎠
7.51 The magnitude responses of H ( z ), H (− z), H ( z 3 ), and H (− z 3 ) are shown below:
|H(e jω )|
|H(_ e jω )|
1
1
π
__
3
0
2π
__
3
π
ω
0
|H(_ e j3ω )|
|H(e j3ω )|
1
π
__
3
2π
__
3
ω
π
1
0 π__
9
π
__
3
5π
__ 7π
__ 2π
__
9 3 9
ω
π
0
2π
__ 4π
__ π
__
9 3 9
2π
__
3
8π
__ π
9
ω
The magnitude responses of H ( z)H ( z 3 ), H (− z) H ( z 3 ), and H ( z)H (− z 3 ) are shown
below:
|H(_ e jω )H(e j3ω )|
|H(e jω )H(e j3ω )|
1
|H(e jω )H(_ e j3ω)|
1
1
0 π__
9
π
__
3
2π
__
3
π
ω
0
π
__
3
2π
__ 7π
__
3 9
π
ω
0
2π
__
__ π
9 3
2π
__
3
π
ω
(
7.52 From Eq. (7.49) we observe that the amplitude response H (ω) of a Type 1 FIR
(
transfer function is a function of cos( ωn). Thus, H (ω + 2πk ) will be a function of
cos((ω + 2πk )n ) = cos(ωn + 2πkn) = cos(ωn) cos(2πkn) − sin(ωn) sin(2πkn) = cos(ωn).
(
Hence, H (ω) is a periodic function in ω with a period 2π.
(
Likewise, from Eq. (7.53) we observe that the amplitude response H (ω) of a Type
(
3 FIR transfer function is a function of sin( ωn). Thus, H (ω + 2πk ) will be a
function of sin((ω + 2πk )n ) = sin(ωn + 2πkn) = sin(ωn) cos(2πkn)
(
+ cos( ωn) sin( 2πkn) = sin( ωn) . Hence, H (ω) is a periodic function in ω with a
period 2π.
(
Next, from Eq. (7.52) we observe that the amplitude response H (ω) of a Type 2
(
1
FIR transfer function is a function of cos⎛⎜ ω(n − ) ⎞⎟. Thus, H (ω + 4πk ) will be a
2 ⎠
⎝
function of
1
1
1
1
1
cos⎛⎜ (ω + 4πk )(n − ) ⎞⎟ = cos⎛⎜ ω(n − ) + 4πk (n − ) ⎞⎟ = cos⎛⎜ ω(n − ) ⎞⎟ cos⎛⎜ 4πk (n − ) ⎞⎟
2 ⎠
2
2 ⎠
2 ⎠
2 ⎠
⎝
⎝
⎝
⎝
Not for sale
198
1
1
1
1
− sin⎛⎜ ω(n − ) ⎞⎟ sin⎛⎜ 4πk (n − ) ⎞⎟ = cos⎛⎜ ω(n − ) ⎞⎟ as cos⎛⎜ 4πk (n − ) ⎞⎟ = 1 and
2 ⎠
2 ⎠
2 ⎠
2 ⎠
⎝
⎝
⎝
⎝
(
1
sin⎛⎜ 4πk (n − ) ⎞⎟ = 0. Hence, H (ω) is a periodic function in ω with a period 4π.
2 ⎠
⎝
(
Finally, from Eq. (7.54) we observe that the amplitude response H (ω) of a Type
(
1
4 FIR transfer function is a function of sin⎛⎜ ω(n − ) ⎞⎟. Thus, H (ω + 4πk ) will be a
2 ⎠
⎝
function of
1
1
1
1
1
sin⎛⎜ (ω + 4πk )(n − ) ⎞⎟ = sin⎛⎜ ω(n − ) + 4πk (n − ) ⎞⎟ = sin⎛⎜ ω(n − ) ⎞⎟ cos⎛⎜ 4πk (n − ) ⎞⎟
2 ⎠
2
2 ⎠
2 ⎠
2 ⎠
⎝
⎝
⎝
⎝
1
1
1
1
+ cos⎛⎜ ω(n − ) ⎞⎟ sin⎛⎜ 4πk (n − ) ⎞⎟ = sin⎛⎜ ω(n − ) ⎞⎟ as cos⎛⎜ 4πk (n − ) ⎞⎟ = 1 and
2
2
2
2 ⎠
⎝
⎠ ⎝
⎠
⎝
⎠
⎝
(
1
sin⎛⎜ 4πk (n − ) ⎞⎟ = 0. Hence, H (ω) is a periodic function in ω with a period 4π.
2 ⎠
⎝
7.53 The remaining zeros are at: z 5 =
1
1
=
= 1.25; z 6 = z 2* = j; z 7 = z 3* = 2 + j 2;
z1 0.8
1
1
=
= 0.25 + j 0.25; z 9 = z8* = 0.25 − j 0.25; z10 = z *4 = −0.5 − j 0.3;
z3 2 − j 2
1
1
0 .5
0 .3
0 .5
0 .3
z11 =
=
=−
+j
, z12 = z11* = −
−j
.
z 4 − 0 .5 + j 0 .3
0.34
0.34
0.34
0.34
z8 =
12
H1 ( z) = ∏ (1 − z k z −1 ) = 1 − 2.6088z −1 + 1.7576 z − 2 + 11.0226 z − 3 + 5.6432 z − 4
k =1
−5
− 24.2166 z
+ 9.7711z −6 − 24.2166 z −7 + 5.6432 z −8 + 11.0226 z −9 + 1.7576 z −10
− 2.6088 z −11 + z −12 .
7.54 The remaining zeros are at: z 4 =
1
1
=
= 0.3226, z 5 = z 2* = −2 − j 4,
z1 3.1
1
1
=
= −0.1 − j 0.2, z 7 = −0.1 − j 0.2,
z2 − 2 + j 4
1
1
z8 = z 3* = 0.8 − j 0.4, z 9 =
=
= 1 − j 0.5, z10 = 1 + j 0.5, z11 = −1.
z 3 0 .8 + j 0 .4
z6 =
11
H 2 ( z) = ∏ (1 − z k z −1 ) = 1 − 1.8226 z −1 + 7.1039z − 2 − 79.4635z − 3 +182.19z − 4
k =1
− 111.2306 z −5 −111.2306 z −6 +182.19 z −7 −79.4635 z −8 +7.1039 z −9 −1.8226 z −10 + z −11 .
Not for sale
199
7.55 The remaining zeros are at: z 4 = z1* = 0.1 + j 0.599,
1
1
z5 =
=
= 0.2711 + j 1.6242, z 6 = z 5* = 0.2711 - j 1.6242,
z1 0.1 − j 0.599
1
z 7 = z 2* = − 0 . 3 − j 0 . 4 , z8 =
= −1.2 − j 1.6, z 9 = z8* = −1.2 + j 1.6,
z2
1
z 3 = 2, z10 =
= 0.5, z10 = 1, z11 = −1.
z3
H 3 ( z ) = 1 − 0 .2423 z − 1 + 1 .0076 z − 2 − 6 .5294 z − 3 + 1 .3338 z − 4 − 17 .2533 z − 5
+ 17.2533 z −7 − 1.3338 z −8 + 6.5294 z −9 − 1.0076 z −10 + 0.2423 z −11 − z −12 .
7.56 The remaining zeros are at: z 4 = 2.2 − j 3.4, z 5 =
1
= 0.1341 − j 0.2073,
z1
z 6 = z *5 = 0.1341 + j 0.2073,
z 2 = 0 . 6 + j 0 . 9 , z 7 = z 2* = 0 . 6 − j 0 . 9 , z8 =
z 9 = z8* = 0.5128 + j 0.7692, z 3 = −0.5, z10 =
1
= 0.5128 − j 0.7692,
z2
1
= −2, z11 = 1.
z3
H 4 ( z) = 1 − 5.3939z −1 + 19.446 z −2 − 5.0838z −3 − 51.8577z −4 + 119.7073z −5
− 119.7073 z −6 + 51.8577 z −7 + 5.0838 z −8 − 19.446 z −9 + 5.3939 z −10 − z −11 .
7.57 The magnitude responses of H ( z M ) (solid line) and F1 ( z ) (dashed line) are shown
below:
|F1(e jω)|
1
0
ω
__p
M
ω__s
M
|H(e jMω )|
_ω
2π
s
__
M
2π
__
M
ω
4π
__
M
Hence, G1 ( z) = H ( z M )F1 ( z ) is a lowpass filter with a unity passband magnitude,
passband edge at ω p / M and stopband edge at ωs / M .
The magnitude responses of H ( z M ) (solid line) and F2 ( z) (dashed line) are shown
below:
Not for sale
200
1
|F2(e jω)|
|H(e jMω )|
0
ω__s
M
ω
__p
M
_ω
+ωs
2π
2π
2π
__
s
__
__
M
M 2π _ ω M 2π + ω
__p
__p
M
M
_ω
4π
s
__
M
ω
4π
__
M
Hence, G2 ( z) = H ( z M )F2 ( z ) is a bandpass filter with a unity passband magnitude,
passband edges at (2π − ω p ) / M and (2π + ω p ) / M , and stopband edges at
(2π − ωs ) / M and (2π + ωs ) / M .
N
N
n=0
n=0
7.58 H ( z) = ∑ h[ n] z − n and H (e jω ) = ∑ h[ n] e − jωn . The frequency response will
exhibit generalized linear phase if it can be expressed in the form H (e jω )
(
(
= H (ω)e − jαωe − jβ , where H (ω), the amplitude function, is a real function of ω
and α and β are constants. We need to examine the case when the order N is
even and when N is odd separately. Without any loss of generality, assume first
5
N = 5. Then H ( z ) = ∑ h[ n] z − n , and
n=0
− jω
H (e jω ) = h[0] + h[1] e
+ h[2] e − j 2ω + h[3] e − j 3ω + h[ 4] e − j 4ω + h[5] e − j 5ω
= e − j 5ω / 2 h[ 0]e j 5ω / 2 + h[5]e − j 5ω / 2 + h[1] e j 3ω / 2 + h[ 4] e − j 3ω / 2 + h[ 2] e jω / 2
(
+ h[3] e − j 3ω / 2 = e − j 5ω / 2 (h[ 0] + h[ 5]) cos( 5ω / 2) + (h[1] + h[ 4]) cos(3ω / 2)
)
[
+ (h[ 2] + h[3]) cos(3ω / 2) + je − j 5ω / 2 (h[ 0] − h[ 5]) sin( 5ω / 2) + (h[1] − h[ 4]) sin(3ω / 2)
]
+ (h[2] − h[3]) cos(3ω / 2)] .
[
It follows then that if h[ n] = h[ 5 − n], 0 ≤ n ≤ 5, we
(
have H (e jω ) = e − j 5ω / 2 H (ω), where
(
H (ω) = 2h[0] cos(5ω / 2) + 2h[1] cos(3ω / 2) + 2h[2] cos(ω / 2), which is a real
function of and as a result, H (e jω ) has generalized phase.
Alternately, if h[ n] = − h[ 5 − n], 0 ≤ n ≤ 5, then we have
(
(
H (e jω ) = je − j 5ω / 2 H (ω) = e − j 5ω / 2 e jπ H (ω), where,
(
H (ω) = 2h[0] sin(5ω / 2) + 2h[1] sin(3ω / 2) + 2h[2] sin(ω / 2), which is a real
function of and as a result, H (e jω ) has generalized phase.
6
Next, assume N = 6. Then H ( z) = ∑ h[ n] z − n , and H (e jω ) = h[0] + h[1] e − jω
n=0
Not for sale
201
+ h[2] e − j 2 ω + h[3] e − j 3ω + h[ 4] e − j 4ω + h[5] e − j 5ω + h[6] e − j 6ω
= e − j 3ω (h[ 0] + h[6]) cos(3ω) + (h[1] + h[5]) cos( 2ω) + (h[ 2] + h[ 4]) cos(ω) + h[3]
[
+ je − j 3ω[(h[ 0] − h[6]) sin(3ω) + (h[1] − h[ 5]) sin( 2ω) + (h[ 2] − h[ 4]) sin( ω)].
]
(
Hence, it follows that if h[ n] = h[6 − n], 0 ≤ n ≤ 6, then H (e jω ) = e − j 3ω H (ω),
(
where H (ω) = 2h[0] cos(3ω) + 2h[1] cos(2ω) + 2h[2] cos(ω) + h[3], which is a real
function of and as a result, H (e jω ) has generalized phase.
Alternately, if h[ n] = − h[6 − n], 0 ≤ n ≤ 5, then we have
(
(
H (e jω ) = je − j 3ω H (ω) = e − j 3ω e jπ H (ω), where,
(
H (ω) = 2h[0] sin(3ω) + 2h[1] sin(2ω) + 2h[2] sin(ω), which is a real function of and
as a result, H (e jω ) has generalized phase.
7.59 Type 1:
Type 2:
Type 3:
Type 4:
h[ n] = {a
h[ n] = {a
h[ n] = {a
h[ n] = {a
−b
−b
−b
−b
−c
−c
−c
−c
d
d
d
d
e
e
e
e
d − c − b a}.
e d − c − b a}.
0 − e − d c b − a}.
− e − d c b − a}.
7.60 (a) Type 1: {h[ n]} = {1 − 3 − 4 6 8 6 − 4 − 3 1}. Hence,
H ( z ) = 1 − 3 z − 1 − 4 z − 2 + 6 z −3 + 8 z − 4 + 6 z − 5 − 4 z − 6 − 3 z − 7 + z −8 .
The zero plot obtained using the M-file zplane is shown below:
Imaginary Part
2
1
8
0
-1
-2
-1
0
1
2
Real Part
3
It can be seen from the above that a complex-conjugate zero pair on the unit circle
appear singly and real zeros appear in mirror-image symmetry. There are no zeros
at z = 1.
(b) Type 2: {h[ n]} = {1 − 3 − 4 6 8 8 6 − 4 − 3 1}. Hence,
H ( z ) = 1 − 3 z − 1 − 4 z − 2 + 6 z − 3 + 8 z −4 + 8 z − 5 + 6 z − 6 − 4 z − 7 − 3 z − 8 + z − 9 .
The zero plot obtained using the M-file zplane is shown below:
Not for sale
202
1.5
Imaginary Part
1
0.5
0
3
9
-0.5
-1
-1.5
-1
0
1
Real Part
2
3
From the above zero plot it can be seen that complex-conjugate zero pairs on the
unit circle appear singly and real zerosappear in mirror-image symmetry. There are
3 zeros at z = −1.
(c) Type 3: {h[ n]} = {1 − 3 − 4 6 8 0 − 8 − 6 4 3 − 1}. Hence,
H ( z) = 1 − 3z −1 − 4 z −2 + 6 z −3 + 8z −4 − 8z −6 − 6 z −7 + 4 z −8 + 3z −9 − z −10 .
The zero plot obtained using the M-file zplane is shown below:
1.5
Imaginary Part
1
0.5
10
0
-0.5
-1
-1.5
-1
0
1
2
Real Part
3
From the above zero plot it can be seen that complex-conjugate zero pairs on the
unit circle appear singly and real zeros appear in mirror-image symmetry. There is
one zero at z = −1. and one zero at z = 1.
(d) Type 4: {h[ n]} = {1 − 3 − 4 6 8 − 8 − 6 4 3 − 1}. Hence,
H ( z ) = 1 − 3 z − 1 − 4 z − 2 + 6 z − 3 + 8 z −4 + 8 z − 5 + 6 z − 6 − 4 z − 7 − 3 z − 8 + z − 9 .
The zero plot obtained using the M-file zplane is shown below:
Not for sale
203
1.5
Imaginary Part
1
0.5
9
0
-0.5
-1
-1.5
-1
0
1
2
Real Part
3
From the above zero plot it can be seen that complex-conjugate zeros appear in
mirror-image symmetry, a complex-conjugate zero pair on the unit circle appear
singly, and real zeros appear in mirror-image symmetry. There is one zero at z = 1.
7.61 H1 ( z) is of Type 1 and hence, it has a symmetric impulse response of odd length
2 N + 1. Let α be the constant term of H1 ( z). Then, the coefficient of the highest
power of z −1 of H1 ( z) is also α.
H 2 ( z) is of Type 2 and hence, it has a symmetric impulse response of even length
2M. Let β be the constant term of H 2 ( z). Then, the coefficient of the highest
power of z −1 of H 2 ( z) is also β .
H 3 ( z) is of Type 3 and hence, it has an anti-symmetric impulse response of odd
length 2 R + 1. Let γ be the constant term of H 3 ( z). Then, the coefficient of the
highest power of z −1 of H 3 ( z) is − γ.
H 4 ( z) is of Type 4 and hence, it has an anti-symmetric impulse response of even
length 2K . Let δ be the constant term of H 4 ( z). Then, the coefficient of the
highest power of z −1 of H 4 ( z) is − δ.
(a) The length of H1 ( z)H1 ( z) is (2 N + 1) + (2 N + 1) − 1 = 4 N + 1 which is odd.
The constant term of H1 ( z)H1 ( z) is α 2 and the coefficient of the highest power of
z −1 of H1 ( z)H1 ( z) is also α 2 . Hence, H1 ( z)H1 ( z) is of Type 1.
(b) The length of H1 ( z)H 2 ( z) is (2 N + 1) + (2 M ) − 1 = 2( N + M ) which is even.
The constant term of H1 ( z)H 2 ( z) is αβ and the coefficient of the highest power of
z −1 of H1 ( z)H 2 ( z ) is also αβ . Hence, H1 ( z )H 2 ( z ) is of Type 2.
(c) The length of H1 ( z)H 3 ( z) is (2 N + 1) + (2 R + 1) − 1 = 2( N + R ) + 1 which is
odd. The constant term of H1 ( z)H 3 ( z) is αγ and the coefficient of the highest
power of z −1 of H1 ( z)H 3 ( z) is − αγ. . Hence, H1 ( z)H 3 ( z) is of Type 3.
Not for sale
204
(d) The length of H1 ( z)H 4 ( z) is (2 N + 1) + (2 K ) − 1 = 2( N + K ) which is even.
The constant term of H1 ( z)H 4 ( z) is αδ and the coefficient of the highest power of
z −1 of H1 ( z)H 4 ( z) is − αδ . Hence, H1 ( z)H 4 ( z) is of Type 4.
(e) The length of H 2 ( z)H 2 ( z) is (2 M ) + (2 M ) − 1 = 4 M − 1 which is odd. The
constant term of H 2 ( z)H 2 ( z) is β 2 and the coefficient of the highest power of
z −1 of H 2 ( z)H 2 ( z) is also β 2 . Hence, H 2 ( z)H 2 ( z) is of Type 1.
(f) The length of H 3 ( z)H 3 ( z ) is (2 R + 1) + (2 R + 1) − 1 = 4 R + 1 which is odd. The
constant term of H 3 ( z)H 3 ( z ) is γ 2 and the coefficient of the highest power of
z −1 of H 3 ( z)H 3 ( z ) is also γ 2 . Hence, H 3 ( z)H 3 ( z ) is of Type 1.
(g) The length of H 4 ( z)H 4 ( z) is (2 K ) + (2 K ) − 1 = 4 K − 1 which is odd. The
constant term of H 4 ( z)H 4 ( z) is δ 2 and the coefficient of the highest power of
z −1 of H 4 ( z)H 4 ( z) is also δ 2 . Hence, H 4 ( z)H 4 ( z) is of Type 1.
(h) The length of H 2 ( z)H 3 ( z ) is (2 M ) + (2 R + 1) − 1 = 2( M + R ) which is even.
The constant term of H 2 ( z)H 3 ( z ) is βγ and the coefficient of the highest power of
z −1 of H 2 ( z)H 3 ( z ) is − βγ . Hence, H 2 ( z)H 3 ( z ) is of Type 4.
(i) The length of H 3 ( z)H 4 ( z) is (2 R + 1) + (2 K ) − 1 = 2( R + K ) which is even. The
constant term of H 3 ( z)H 4 ( z) is γδ and the coefficient of the highest power of
z −1 of H 3 ( z)H 4 ( z) is also γδ . Hence, H 3 ( z)H 4 ( z) is of Type 2.
7.62 (a) F 1( z ) = 2.1 − 3.5z −1 + 4.2 z −2 = 2.1(1 − 1.667z −1 + 2 z −2 ). F1( z) has complex
conjugate zeros at z = 0.8333 ± j1.1426. To generate a linear-phase transfer
function H ( z ) , we need to multiply F1( z) with the factor F 2 ( z) which has
complex-conjugate zeros situated in the z –plane with a mirror-image symmetry
with respect to the zeros of F1( z) . Hence, F 2 ( z) = 2 − 1.667z −1 + z −2 , resulting in
H ( z ) = F1 ( z )F2 ( z) = 2.1(2 − 5z −1 + 7.7778z −2 − 5z −3 + 2 z −4 )
= 4.2 − 10.5z −1 + 16.3333 z −2 − 10.5z −3 + 4.2 z −4 .
(b) F 1( z) = 1.4 + 5.2 z −1 − 2.2 z −2 + 3.3z −3
= 1.4(1 + 3.7143z −1 − 1.5714 z −2 + 2.3571z −3 ). F1( z) has complex conjugate zeros
Not for sale
205
at z = 0.2524 ± j 0.7035 . and a real zero at − 4.2192. To generate a linear-phase
transfer function H ( z ) , we need to multiply F1( z) with the factor F 2 ( z) which has
situated in the z –plane with a mirror-image symmetry with respect to the zeros of
F1( z) . Hence, F 2 ( z ) = 2.3571 − 1.5714 z −1 + 3.7143z −2 + z −3 , resulting in
H ( z) = F1 ( z)F2 ( z) = 1.4(2.3571 + 7.1837z −1 − 5.8265z −2 + 22.8214 z −3
− 5.8265z −4 + 7.1837z −5 + 2.3571z −6 ) = 3.3 + 10.0571z −1 − 8.1671z −2 + 31.95z −3
− 8.1571z −4 + 10.0571z −5 + 3.3z −6 .
N
7.63 We rewrite the polynomial H ( z ) in the form f ( z) = Kz − N ∏ ( z − λi ) . Its
i =1
'
logarithmic differential is given by
z
f ( z)
N N 1
or
=− +∑
f ( z)
z i =1 z − λi
N
N
f ' ( z)
z
1
.
= −N + ∑
= −N + ∑
f ( z)
z
−
λ
1
−
(
λ
/
z
)
i
i
i =1
i =1
For any | z |> max | λi | we can expand the above in a Taylor series as
i
N
[
]
f ′( z)
= − N + ∑ 1 + (λi / z) + (λi / z)2 + (λi / z)3 + ... , or
f ( z)
i =1
f ′(z)
z
= − N + N + (S1 / z) + (S2 / z)2 + (S3 / z)3 + ...
f ( z)
z
where S m =
N
∑ λi
m
(1)
.
i =1
Now set f ( z ) = h[0] + h[1]z −1 + h[2]z −2 + ... + h[ N ]z − N . So that
z
f ′( z)
h[1]z −1 + 2h[2]z −2 + ... + Nh[ N ]z − N
.
=−
f ( z)
h[0] + h[1]z −1 + h[2]z−2 + ... + h[ N ]z − N
(2)
Equations (1) and (2) pertain to the same quantity hence identically the right hand
sides are the same. Thus the following convolution holds true
{h[0],
h[1], h[2], K, h[ N ]}O
* {0, S1 , S 2 , S 3 , K} = −{h[1], 2h[ 2], K, Nh[ n]}
Hence the Newton Identities.
n1
n2
i =1
i =1
7.64 The root moments of Sm of H ( z) = K ∏ (1 − αi z −1 )∏ (1 − βi z −1 ) are defined as
Not for sale
206
Sm =
n1
∑ α im +
i =1
n2
∑ βim .
For real H ( z ), the complex roots occur in conjugate pairs
i =1
and hence, their corresponding powers are also in this form, thereby making their
sum entirely real.
(a) If H ( z ) is minimum-phase, then βi = 0 for all i, and αi < 1. Therefore as
m → ∞, S m will decrease exponentially.
n1
n2
i =1
i =1
(b) Write ln H ( z ) = ln K + ∑ ln(1 − αi z −1 ) + ∑ ln(1 − βi z −1 ) and then expand
ln H ( z ) in a Laurent series. The second summation can be re-expressed as
n2
∑ ln(1 − βi z
−1
)=
i =1
ln H ( z) = ln K +
n2
⎛
i =1
⎝
∑ ln( − βi z −1 )⎜⎜ 1 −
z
βi
⎞
⎟⎟. Hence,
⎠
n2
n1
n2
i =1
i =1
i =1
z
∑ ln(− βi ) − n 2 ln z + ∑ (1 − αi z −1 ) + ∑ (1 − β ). Now, βi appear
i
n2
in complex conjugate pairs, hence, ln K + ∑ ln(− βi ) can be written as ln K1 where
i =1
K1 is real.
⎡
⎤
(α z −1 )2 (αi z −1 )3
+
+ L⎥ and
However, ln(1 − αi z −1 ) = − ⎢αi z −1 + i
2
3
⎢⎣
⎥⎦
⎡ z ( z / β ) 2 ( z / β )3
⎤
⎛
z ⎞
i
i
⎜
⎟
+
+ L⎥. These two Taylor series expansions are
ln⎜ 1 − ⎟ = − ⎢ +
βi ⎠
2
3
⎝
⎣⎢ βi
⎦⎥
valid since αi z −1 < 1 and z / βi < 1 on z = 1. Thus,
ln H ( z ) = ln K1 −
N2
n1
n1
∞ ⎛ S N1
⎞
N2
m
m z − m + S − m z m ⎟ where S N1 =
⎜
α
and
S
=
βi− m .
∑⎜
∑
∑
m
i
−m
⎟
m
m =1 ⎝ m
i =1
i =1
⎠
(
On z = 1 we have H ( z ) z = e jω = H (ω) e jθ (ω) and therefore,
⎛ ∞ S N1 − jmω ∞ S N 2 jmω ⎞
(
⎟ + (− jn ω).
ln H (ω) + jθ (ω) = ln K1 − ⎜ ∑ m e
+ ∑ −m e
2
⎜ m =1 m
⎟
m
m =1
⎝
⎠
On equating real and imaginary parts of the equation we arrive at
∞ ⎛ S N1 + S N 2 ⎞
(
− m ⎟ cos(mω),
ln H (ω) = ln K1 − ∑ ⎜ m
⎜
⎟
m
m =1 ⎝
⎠
∞ ⎛ S N1 − S N 2 ⎞
− m ⎟ sin(mω).
θ (ω) = − n2 ω + ∑ ⎜ m
⎜
⎟
m
m =1 ⎝
⎠
Not for sale
207
(c) From the expression for the phase as given above, it can be seen that the second
term contributes non-linear components to the phase, whilst the only term which is
linear is the first (− n2 ω). Thus to have linear phase we must have (1) n2 ≠ 0 and (2)
N1
Sm
= S −Nm2 . The second condition means that the zeros of H ( z ) outside the unit circle
must be the same in number as those inside the unit circle and the zeros outside must be
at locations of the zeros inside the unit circle.
d + e − jω d1e jω / 2 + e − jω / 2
d + z −1
7.65 (a) A1 ( z ) = 1
. Thus, A1 (e jω ) = 1
=
1 + d1e − jω e jω / 2 + d1e − jω / 2
1 + d1z −1
α e jβ
=
= e j 2 β , where αe jβ = d1e jω / 2 + e − jω / 2 )
− jβ
αe
= (d1 + 1) cos(ω / 2) + j(d1 − 1) sin(ω / 2). Therefore, phase is given by
⎛ 1 − d1
⎞
θ (ω) = 2 β = −2 tan −1 ⎜⎜
tan(ω / 2) ⎟⎟. Now, for small values of x, tan( x ) ≅ x and
⎝ 1 + d1
⎠
tan −1 ( x ) ≅ x. Hence, the approximate expression for the phase at low frequencies
⎛ 1 − d1 ⎞ ω
⎛ 1 − d1 ⎞
⎟⎟ = −⎜⎜
⎟⎟ ω. Therefore, the approximate
is given by θ (ω) ≅ −2⎜⎜
⎝ 1 + d1 ⎠ 2
⎝ 1 + d1 ⎠
θ ( ω)
1 − d1
expression for the phase delay is given by τ p (ω) = −
samples.
=δ≅
ω
1 + d1
(b) For δ = 0.5 samples, d1 =
1− δ
1+ δ
=
0 .5
1.5
=
1
.
3
Then, A1 ( z) =
1
3
+ z −1
1 + z −1
1
3
. Thus, the
2 1− d
2
θ ( ω)
= ⎛⎜ 1 tan(ω / 2) ⎞⎟ = (0.5 tan(ω / 2)).
exact phase delay is given by τ p (ω) = −
ω
ω ⎝ 1+ d1
ω
⎠
For a sampling rate of 20 kHz, the normalized angular frequency equivalent to 1
kHz is ω o =
τ p (ω o ) =
10 3
20×10 3
2
ωo
=
1
20
= 0.05. The exact phase delay at ωo is thus
(0.5 tan(ωo / 2) =
2
(0.5 tan(0.025) = 0.500078 samples, which is
0.05
seen to be very close to the desired phase delay of 0.5 samples.
Phase delay, in samples
Phase delay, in samples
1
0.9
0.8
0.7
0.6
0.5
0
0.2
0.4
0.6
0.8
1
0.55
0.5
0.45
0.4
ω/π
0
0.05
0.1
0.15
0.2
ω/ π
Not for sale
208
d2 + d1e − jω + e − j 2 ω
d2 e jω + d1 + e − jω
7.66 A2 (e ) =
=
1 + d1e − jω + d2 e − j 2ω e jω + d1 + d2 e − jω
(d + d2 cos ω + cos ω) + j (d2 sin ω + sin ω) (d1 + (d2 + 1) cos ω) + j (d2 − 1) sin ω
=
.
= 1
(d1 + d2 cos ω + cos ω) + j (sin ω − d2 sin ω) (d1 + (d2 + 1) cos ω) − j (d2 − 1) sin ω
( d 2 −1) sin ω ⎞
Therefore, θ(ω) = 2 tan −1 ⎛⎜
⎟. Now,
⎝ d1 + ( d 2 +1) cos ω ⎠
θ(ω)
2
⎛ ( d 2 −1) sin ω ⎞ . For ω ≅ 0, sin ω = ω and
τ p (ω) = −
= − tan −1 ⎜
⎟
ω
ω
⎝ d1 + ( d 2 +1) cos ω ⎠
( d −1)ω ⎞
2
−1
cos ω = 1. Then, τ p (ω) = − tan −1 ⎛⎜ 2
⎟. Also, for x ≅ 0, tan x ≅ x.
ω
d
+
(
d
+
1
)
2
⎝ 1
⎠
2( d 2 −1)
2 ( d 2 −1)ω
2−δ ⎞
=−
. Now, substituting d1 = 2⎛⎜
Hence, τ p (ω) = −
⎟ and
ω d1 + ( d 2 +1)
d1 + d 2 +1
⎝ 1+ δ ⎠
jω
d2 =
2( d 2 −1)
(2 − δ)(1− δ)
, we can easily show that −
= δ.
(2 + δ)(1+ δ)
d1 + d 2 +1
7.67 Since G ( z ) is non-minimum phase but causal, it will have some zeros outside the
unit circle. Let z = α be one such zero. We can then write G( z) = P( z)(1 − αz −1 )
−1 ⎞
⎛ 1− αz −1 ⎞
⎛
⎟. Note that ⎜ 1− αz
⎟
= P( z)(−α * + z −1 )⎜⎜
⎜ ( −α * + z −1 ) ⎟ is a stable first-order
−1 ⎟
⎠
⎝ ( −α * + z ) ⎠
⎝
allpass function. If we carry out this operation for all zeros of G ( z ) that are outside
the unit circle, we can write G ( z ) = H ( z ) A( z ) where H ( z ) will have all zeros inside
the unit circle and will thus be a minimum phase function and will be a product of
stable first-order allpass functions, and hence an allpass function.
(3z − 2.1)( z 2 + 2.5z + 5)
. In order to correct for magnitude distortion we
( z − 0.65)( z + 0.48)
require the transfer function G ( z ) to satisfy the following property
1
G(e jω ) =
. Hence, one possible solution is
jω
H (e )
7.68 H ( z ) =
Gd ( z ) =
1
( z − 0.65)( z + 0.48)
. Note that the coefficients of the pole
=
H ( z) (3z − 2.1)(z 2 + 2.5z + 5)
factor ( z 2 + 2.5z + 5) in the denominator of Gd (z ) do not satisfy the condition of
Eq. (7.139) and hence, has roots outside the unit circle making Gd (z ) unstable.
To develop a stable transfer function with magnitude response same as Gd (z ) , we
multiply it with the stable allpass function
z 2 + 2.5z + 5
5z 2 + 2.5z + 1
Not for sale
resulting in the transfer
209
( z − 0.65)( z + 0.48)
function G( z) =
(3z − 2.1)(5z 2 + 2.5z + 1)
which is the desired stable solution
satisfying the condition G (e jω ) H (e jω ) = 1.
7.69 (a) G ( z ) = H ( z ) A( z ), where A( z ) is an allpass function. Then, g[ 0] = lim G ( z ).
z→∞
Hence,
g[0] = | lim G( z) | = | lim H ( z ) A( z) | = | lim H ( z) | | lim A( z) | ≤ | lim H ( z) |
z →∞
z →∞
z →∞
z →∞
z →∞
≤ | lim H ( z ) | because | lim A( z ) | < 1 because of Property 2 of stable allpass
z→∞
z→∞
function (see Eq. (7.20)). Hence, g[0] ≤ h[0] .
(b) If λ1 is a zero of H ( z ), then λ1 < 1, since H ( z ), is a minimum-phase causal
stable transfer function. As H ( z ) has all zeros inside the unit circle, we can write
H ( z ) = B( z)(1 − λ1z −1 ). It follows that B( z ) is also a minimum-phase causal
transfer function.
⎛ λ* − z −1 ⎞
⎟. If
Now consider the transfer function F ( z ) = B( z)( λ*1 − z −1 ) = H ( z)⎜ 1
⎜ 1 − λ z −1 ⎟
1
⎝
⎠
h[ n], b[ n], and f [ n] denote, respectively, the inverse z –transforms of H ( z ), B( z ),
b[0],
n = 0,
⎧
and
and F ( z ), then we get h[ n] = ⎨
⎩b[ n] − λ1b[ n − 1], n ≥ 1,
⎧⎪
λ*1b[0],
n = 0,
f [ n] = ⎨ *
⎪⎩ λ1b[ n] − b[ n − 1], n ≥ 1.
m
2
m
2
2
2
m
2
2
m
2
Consider ε = ∑ h[ n] − ∑ f [ n] = b[0] − λ*1 b[0] + ∑ h[ n] − ∑ f [ n] .
n=0
2
n=0
2
2
n =1
n =1
2
Now, h[ n] = b[ n] + λ1 b[ n − 1] − λ1b[ n − 1]b * [ n] − λ*1b * [ n − 1]b[ n], and
2
2
2
2
f [ n] = λ1 b[ n] + b[ n − 1] − λ1b[ n − 1]b * [ n] − λ*1b * [ n − 1]b[ n]. Hence,
m
m
2
2
2
2
2
2
2
2
2
ε = b[0] − λ1 b[0] + ∑ ⎛⎜ b[ n] + λ1 b[ n − 1] ⎞⎟ − ∑ ⎛⎜ λ1 b[ n] − b[ n − 1] ⎞⎟
⎝
⎠
⎝
⎠
n =1
n =1
2
m
2
2
m
2
= (1 − λ1 ) b[ m] . Since λ1 < 1, ε > 0, i.e., ∑ h[ n] > ∑ f [ n] . Hence,
n=0
m
2
m
n=0
2
∑ h[ n] ≥ ∑ g[ n] .
n=0
n=0
Not for sale
210
(2 z + 3)(4 z − 1)
3
has a zero at z = which is outside the unit circle and is
2
( z + 0.4)( z − 0.6)
thus a non-minimum phase transfer function. To develop a minimum phase transfer
7.70 H ( z) =
function G ( z ) such that G (e jω ) = H (e jω ) , we multiply with an allpass function
3z + 2
(3z + 2)(4 z − 1)
and arrive at G( z) =
which is minimum phase.
( z + 0.4)( z − 0.6)
2z + 3
The first 5 impulse response of H ( z ) are
{h[ n]} = {8 11.6 1.24 3.032 0.904}, 0 ≤ n ≤ 4, and
The first 5 impulse response of G ( z ) are
{g[ n]} = {12 7.4 2.36 2.248 1.016}, 0 ≤ n ≤ 4.
m
0
m
Σ h[ n]
n=0
m
Σ g[ n]
2
2
n= 0
64
1
2
3
4
198.56 200.0976 209.2906 210.1078
144 198.76 204.3296 209.3831 210.4154
m
m
2
2
It follows from the above that ∑ g[ n] > ∑ h[ n]
n=0
n=0
for m ≥ 1.
7.71 See Example 7.14.
(a) H BS ( z) = (1 + z − 2 )2 . Thus, H BP ( z ) = z − 2 − (1 + z − 2 )2 = − (1 − z − 2 )2 .
4
4
4
1
1
1
(b) H BS ( z) = (1 + z − 2 )(−1 + 6 z − 2 − z − 4 ). Thus,
16
1
H BP ( z ) = z − 4 −
=
1
(1 + z − 2 )(−1 + 6 z − 2
16
− z−4 ) =
1
(1 − 4 z − 2
16
+ 6 z − 4 − 4 z − 6 + z −8 )
1
−2 4
(1 − z ) .
16
(c) H BS ( z ) = (1 + z − 2 )2 (−3 + 14 z − 2 − 3z − 4 ). Thus,
32
1
H BP ( z) = z − 4 −
1
(1 + z − 2 )2 (−3 + 14 z − 2
32
− 3z − 4 ) =
1
(3 − 8z − 2
32
+ 10 z − 4 − 8 z − 6 + 3z − 8 ).
7.72 H 0 ( z ) = A0 ( z ) + A1 ( z), and H1 ( z) = A0 ( z) − A1 ( z), where A0 ( z) and A1 ( z) are
allpass functions of orders M and N , respectively. Hence, the orders of H 0 ( z)
z − M D0 ( z −1 )
and
and H1 ( z) are M + N . Now, we can write A0 ( z) =
D0 ( z)
Not for sale
211
A1 ( z) =
z − N D1 ( z −1 )
. Then,
D1 ( z )
H0 (z) =
P( z) z − M D0 ( z −1 ) D1 ( z ) + z − N D0 ( z) D1 ( z −1 )
=
and
D( z )
D0 ( z) D1 ( z )
H1 ( z) =
Q( z) z − M D0 ( z −1 ) D1 ( z) − z − N D0 ( z) D1 ( z −1 )
. Since P (z ) is of degree
=
D( z )
D0 ( z ) D1 ( z )
[
M + N and z − ( M + N ) P ( z −1 ) = z − ( M + N ) z M D0 ( z ) D1 ( z −1 ) + z N D0 ( z −1 ) D1 ( z )
]
= z − M D0 ( z −1 ) D1 ( z ) + z − N D0 ( z ) D1 ( z −1 ) = P ( z ). Hence, P (z ) is symmetric.
Similarly, one can show that Q(z ) is anti-symmetric.
1
1
7.73 H 0 ( z) = [ A0 ( z) + A1 ( z )] and H1 ( z) = [ A0 ( z) − A1 ( z)]. Thus,
2
2
H 0 ( z ) H 0 ( z −1 ) + H1 ( z ) H1 ( z −1 ) = [ A0 ( z) + A1 ( z)][ A0 ( z −1 ) + A1 ( z −1 )]
1
4
−1
+ [ A0 ( z ) − A1 ( z )][ A0 ( z −1 ) − A1 ( z )]
4
1
= [ A0 ( z ) A0 ( z −1 ) + A0 ( z) A1 ( z −1 ) + A1 ( z) A0 ( z −1 ) + A1 ( z) A1 ( z −1 )]
4
1
+ [ A0 ( z) A0 ( z −1 ) − A0 ( z) A1 ( z −1 ) − A1 ( z ) A0 ( z −1 ) + A1 ( z) A1 ( z −1 )]
4
1
2
2
= [ A0 ( z) A0 ( z −1 ) + A1 ( z ) A1 ( z −1 )] = 1. Thus, H 0 (e jω ) + H1 (e jω ) = 1
1
2
implying that H 0 ( z) and H1( z) form a power-complementary pair.
2
7.74 H 0 (e jω ) =
{A0 (e jω ) A0* (e jω ) + A1(e jω ) A0* (e jω ) + A0 (e jω ) A1* (e jω )
+ A1 (e jω ) A1* (e jω )}. Since A0 ( z) and A1 ( z) are allpass functions,
1
4
A0 (e jω ) = e jφ0 (ω) and A1 (e jω ) = e jφ1 (ω) . Therefore,
2
H 0 ( e jω ) =
{
}
1
2 + e j (φ0 (ω) − φ1 (ω)) + + e − j (φ0 (ω) − φ1 (ω)) ≤ 1 as maximum values of
4
and e − j (φ0 (ω) − φ1 (ω)) are 1. H 0 ( z) is stable since A0 ( z) and A1 ( z)
are stable allpass functions. Hence, H 0 ( z) is BR.
e
j ( φ0 ( ω)− φ1( ω))
1 M −1
1 M −1M −1
−1
−1
∑ Ak ( z). Thus, H ( z)H ( z ) = 2 ∑ ∑ Ak ( z) Ar ( z ). Hence,
M k =0
M k =0 r =0
2
M
−
1
M
−
1
1
j (φ (ω) − φr (ω))
H ( e jω ) =
≤ 1. Also, H (z ) is stable since
∑ ∑ e k
2
M r =0 k =0
Ai ( z ), 0 ≤ i ≤ M − 1, are stable allpass functions. Hence, H (z ) is BR.
7.75 H ( z) =
Not for sale
212
1
1
7.76 H BP ( z) = [1 − A( z)] and H BS ( z) = [1 + A( z)] where
2
2
A( z ) =
α − β (1 + α )z −1 + z −2
is an allpass function. Note
1 − β (1 + α )z −1 + αz − 2
H BP ( z ) + H BS ( z ) = A( z ) and from the solution of Problem 7.73,
2
2
H BP (e jω ) + H BS (e jω ) = 1. Hence, H BP (z) and H BS (z) are doublycomplementary pair.
7.77 H ( z )H ( z −1 ) + H (− z)H (− z −1 ) = K . On the unit circle, this reduces to
H (e jω )H (e − jω ) + H (−e jω )H (−e − jω ) = K , or, equivalently,
2
2
H (e jω ) + H (−e jω ) = K , as H (z ) is a real-coefficient transfer function. Now,
2
2
H (−e jω ) = H (e j (π + ω) ) . Hence, for ω = π / 2, the power-symmetric condition
2
2
reduces to H (e jπ / 2 ) + H (e j (π + π / 2) ) = K . Since H (z ) is a real-coefficient
transfer function, H (e jω )
2
2
is an even function of ω, and thus,
2
2
H (e jπ / 2 ) = H (e j (2π − π / 2) ) . As a result, 2 H (e jπ / 2 ) = K , from which we
obtain 10 log10 2 + 20 log10 H (e jπ / 2 ) = 10 log10 K , or,
20 log10 H (e jπ / 2 ) = 10 log10 K − 3 dB.
7.78 H ( z ) = A0 ( z 2 ) + z −1 A1 ( z 2 ). Therefore,
H ( z )H ( z −1 ) + H ( − z ) H ( − z −1 ) = [ A0 ( z 2 ) + z −1 A1 ( z 2 )][ A0 ( z −2 ) + zA1 ( z −2 )]
+ [ A0 (( − z )2 ) − z −1 A1(( − z )2 )] [ A0 (( − z )2 ) − z A1(( − z )2 )]
= A0 ( z 2 ) A0 ( z −2 ) + z −1 A1 ( z 2 ) A0 ( z −2 ) + z A0 ( z 2 ) A1 ( z −2 ) + A1 ( z 2 ) A1 ( z −2 )
+ A0 ( z 2 ) A0 ( z −2 ) − z −1 A1 ( z 2 ) A0 ( z −2 ) − z A0 ( z 2 ) A1 ( z −2 ) + A1 ( z 2 ) A1 ( z −2 ) = 4, as
A0 ( z 2 ) A0 ( z −2 ) = A1 ( z 2 ) A1 ( z −2 ) = 1.
Not for sale
213
7.79 H ( z) =
− 0.1 + 0.5z −1 + 0.05z −2 + 0.05z −3 + 0.5z −4 − 0.1z −5
where A( z) =
1 + 0.1z
−2
− 0.2 + 0.1z −1 + z −2
1 + 0.1z −1 − 0.2 z − 2
− 0.2 z
−4
= [ A( z 2 ) + z −1 ],
1
2
is a stable allpass function. Thus,
H ( z )H ( z −1 ) + H (− z )H (− z −1 ) = [ A( z 2 ) + z −1 ][ A( z − 2 ) + z ]
1
4
+ [ A( z 2 ) − z −1 ][ A( z − 2 ) − z] = 1.
1
4
7.80 (a) H a ( z ) = 1 − 2 z −1 + 4.5z −2 + 6 z −3 + z −4 + 0.5z −5 . Thus, H a ( z )H a ( z −1 )
= (1 − 2 z −1 + 4.5z −2 + 6 z −3 + z −4 + 0.5z −5 )(1 − 2 z + 4.5z 2 + 6 z 3 + z 4 + 0.5z 5 )
= 0.5z 5 + 6.25z 3 + 22.5z + 62.5 + 22.5z −1 + 6.25 z −3 + 0.5z −5 .
Next, we compute H a ( − z ) H a (− z −1 ) =
= (1 + 2 z −1 + 4.5z −2 − 6 z −3 + z −4 − 0.5z −5 )(1 + 2 z + 4.5z 2 − 6 z 3 + z 4 − 0.5z 5 )
= −0.5z 5 − 6.25 z 3 − 22.5z + 62.5 − 22.5z −1 − 6.25 z −3 − 0.5z −5 .
Hence, H a ( z ) H a ( z −1 ) + H a ( − z ) H a ( − z −1 ) = 125.
(b) H b ( z) = 1 + z −1 + z − 2 − z − 4 + 2 z − 5 . Thus, H a ( z )H a ( z −1 )
4
2
1
15
15
1
H b ( z)H b ( z −1 ) = ⎛⎜1 + z −1 + z − 2 − z − 4 + 2 z − 5 ⎞⎟⎛⎜1 + z + z 2 − z 4 + 2 z 5 ⎞⎟
2
4
4
2
⎝
⎠⎝
⎠
1
15
= 2 z 5 + 7 z 3 + 0.375 z + 20.3125 + 0.375 z −1 + 7 z −3 + 2 z −5 .
Next, we compute H b (− z )H b ( − z −1 ) =
= (1 − 0.5z −1 + 3.75z −2 − z −4 − 2 z −5 )(1 − 0.5z + 3.75z 2 − z 4 − 2 z 5 )
= −2 z 5 − 7 z 3 − 0.375 z + 20.3125 − 0.375 z −1 − 7 z −3 − 2 z −5 .
Hence, H a ( z )H a ( z −1 ) + H a ( − z ) H a (− z −1 ) = 40.625.
7.81 H ( z )H ( z −1 ) = a 2 (1 + bz −1 )(1 + bz) = a 2 bz + a 2 (1 + b 2 ) + a 2 bz −1 = cz + d + cz −1 .
Thus, c = a 2 b and d = a 2 (1 + b 2 ). Now, H ( z)H ( z −1 ) + H (− z)H (− z −1 )
cz + d + cz −1 − cz + d − cz −1 = 2 d. Therefore, 2 d = 2 a 2 (1 + b 2 ) = 1. This
1
condition is satisfied by a =
1
2
2(1+ b 2 )
b = −1, a = , and b = 10, a =
1
10
1
2
. For b = 1, a = . Other solutions include
.
Since H (z ) is a first-order causal FIR transfer function, G( z) = − z −1 H (− z −1 ) is
also a first-order causal FIR transfer function. Now,
Not for sale
214
H ( z )H ( z −1 ) + G( z)G( z −1 ) = H ( z )H ( z −1 ) + [ − z −1 H (− z −1 )][− zH (− z )]
= H ( z )H ( z −1 ) + H (− z )H (− z −1 ) = 1. Hence, H (z ) and G (z ) are power
complementary.
7.82 H ( z)H ( z −1 ) = (cz + d + cz −1 )[ d 2 z 2 + d1 (1 + d 2 )z + (1 + d12 + d 22 ) + d1 (1 + d 2 )z −1 + d 2 z −2 ]
Thus, H ( z)H ( z −1 ) + H (− z)H (− z −1 ) = 2[cd1 (1 + d 2 )z 2 + dd 2 z 2 + 2cd1 (1 + d 2 )
+ d (1 + d12 + d 22 ) + dd 2 z −2 + cd1 (1 + d 2 )z −2 ] = 1. Hence, we require
dd2 + cd1 (1 + d 2 ) = 0 and 2cd1 (1 + d 2 ) + + d (1 + d12 + d 22 ) = 1. Solving these two
d2
equations we arrive at c =
, and
d 2 (1 + d 2 )(2d 2 − 1 − d12 − d 22 )
1
1
d=−
. For d1 = d2 = 1, we get c = − and d = 1.
2
2 d 2 − 1 − d12 − d 22
Since H (z ) is a third-order causal FIR transfer function, G( z) = − z −3 H (− z −1 ) is
also a third-order causal FIR transfer function. Now,
H ( z )H ( z −1 ) + G( z )G( z −1 ) = H ( z )H ( z −1 ) + [ − z −3 H (− z −1 )][ − z 3 H (− z)]
= H ( z )H ( z −1 ) + H (− z )H (− z −1 ) = 1. Hence, H (z ) and G (z ) are power
complementary.
1
1
7.83 H 0 ( z) = [ A 0 ( z) + A1 ( z )] and H1 ( z) = [ A 0 ( z ) − A1 ( z)], where A0 ( z ) and A1 ( z)
2
2
are stable allpass transfer functions. From these two equations we obtain
H 0 ( z) + H1 ( z) = A0 ( z ), and H 0 ( z) − H1 ( z ) = A1 ( z). Moreover, we have
2
2
H 0 (e jω ) + H1 (e jω ) = 1. Choose G 0 ( z ) = H 02 ( z ) and G1 ( z) = − H12 ( z).
2
2
Hence, G 0 (e jω ) + G1 (e jω ) = H 0 (e jω ) + H 1(e jω ) = 1 .
7.84 (a) H1 ( z) = (1 + 3z −1 ). Therefore, H1 ( z)H1 ( z −1 ) = (1 + 3z −1 )(1 + 3z) ⇒
4
16
1
2
H 1 ( e jω ) =
1
2⎞
d ⎛
10 + 6 cos ω
3
⎜⎜ H1 (e jω ) ⎟⎟ = − sin ω < 0 for 0 ≤ ω < π.
. Thus,
8
dω ⎝
16
⎠
Thus, H1 (e jω ) is a montonically decreasing function of ω. The maximum value
of H1 (e jω ) = 1 is at ω = 0, and the minimum value is at ω = π. Hence, H1 ( z) is
BR.
(1 − 1.2 z −1 ). Therefore, H 2 ( z)H 2 ( z −1 ) =
(1 − 1.2 z −1 )(1 − 1.2 z) ⇒
(b) H 2 ( z) =
2.2
4.84
1
1
Not for sale
215
2
H 2 ( e jω ) =
2⎞
d ⎛
2.44 − 2.4 cos ω
2.4
⎜⎜ H 2 (e jω ) ⎟⎟ =
sin ω > 0 for
. Thus,
dω ⎝
4.84
⎠ 4.84
0 ≤ ω < π. Thus, H 2 (e jω ) is a montonically increasing function of ω. The
maximum value of H 2 (e jω ) = 1 is at ω = π, and the minimum value is at ω = 0.
Hence, H 2 ( z) is BR.
1 + α z −1
(1 + αz −1 )(1 − β z −1 )
G
z
(
)
=
(c) H 3 ( z ) =
and
= G1 ( z )G 2 ( z ), where 1
1+ α
(1 + α)(1 + β)
G2 ( z) =
2 1 + α 2 + 2α cos ω
1 − β z −1
. Now, G1 (e jω ) =
. Thus,
1+ β
(1 + α) 2
2⎞
d ⎛
2α sin ω
⎜⎜ G1 (e jω ) ⎟⎟ = −
< 0 for 0 ≤ ω < π as α > 0. As a result, G1 (e jω ) is
2
dω ⎝
(1 + α)
⎠
a monotonically decreasing decreasing function of ω. The maximum value of
G1 (e jω ) = 1 is at ω = 0, and the minimum value is at ω = π. Hence, G1 ( z) is BR.
2
Likewise, G 2 (e jω ) =
1 + β 2 − 2β cos ω
(1 + β) 2
. Thus,
2 ⎞ 2β sin ω
d ⎛
⎜⎜ G2 (e jω ) ⎟⎟ =
>0
dω ⎝
⎠ (1 + β) 2
for 0 ≤ ω < π as β > 0. Thus, H 2 (e jω ) is a montonically increasing function of
ω. The maximum value of G 2 (e jω ) = 1 is at ω = π, and the minimum value is at
ω = 0. Hence, G2 ( z) is BR. Therefore, H 3 ( z ) = G3 ( z )G2 ( z) is also BR.
(1 − 0.3z −1 )(1 + 0.2 z −1 )(1 − 0.5z −1 ) ⎛⎜ 1 − 0.3z −1 ⎞⎟⎛⎜ 1 + 0.2 z −1 ⎞⎟⎛⎜ 1 − 0.5z −1 ⎞⎟
=
.
⎜
⎟⎜
⎟⎜
⎟
2.34
1
.
3
1
.
2
1
.
5
⎝
⎠⎝
⎠⎝
⎠
Since each individual factor on the right-hand side is BR, H 4 ( z) is BR.
(d) H 4 ( z ) =
7.85 (a) H1 ( z) =
2.6 + 2.6 z −1
4.2 + z −1
A0 ( z) = 1 and A1 ( z ) =
=
1 ⎛⎜ 1 + 4.2 z −1 ⎞⎟ 1
1+
= ( A0 ( z ) + A1 ( z )), where
2 ⎜⎝
4.2 + z −1 ⎟⎠ 2
1 + 4.2 z −1
are stable allpass transfer functions. Therefore,
4.2 + z −1
H1 ( z) is BR (See solution of Problem 7.74).
Not for sale
216
(b) H 2 ( z) =
1.6 − 1.6 z −1
1 ⎛⎜ 1 + 4.2 z −1 ⎞⎟ 1
= 1−
= ( A ( z) − A1 ( z)), where
−1
−1 ⎟ 2 0
⎜
2
4.2 + z
4.2 + z ⎠
⎝
A0 ( z) = 1 and A1 ( z ) =
1 + 4.2 z −1
are stable allpass transfer functions. Therefore,
4.2 + z −1
H 2 ( z) is BR (See solution of Problem 7.74).
(c) H 3 ( z ) =
0.1(1 − z − 2 )
1 + 0.4 z −1 + 0.8z − 2
1 ⎛⎜
0.8 + 0.4 z −1 + z − 2
1−
2 ⎜⎝ 1 + 0.4 z −1 + 0.8z − 2
=
⎞
⎟
⎟
⎠
0.8 + 0.4 z −1 + z −2
1
are stable
= ( A0 ( z ) − A1 ( z )) , where A0 ( z) = 1 and A1 ( z) =
2
1 + 0.4 z −1 + 0.8z − 2
allpass transfer functions. Therefore, H 3 ( z) is BR (See solution of Problem 7.74).
(d) H 4 ( z ) =
4.5 + 2 z −1 + 4.5z − 2
5 + 2 z −1 + 4 z − 2
where A0 ( z) = 1 and A1 ( z ) =
=
1 ⎛⎜ 4 + 2 z −1 + 5z − 2
1+
2 ⎜⎝ 5 + 2 z −1 + 4 z − 2
⎞ 1
⎟ = ( A ( z) + A ( z)) ,
1
⎟ 2 0
⎠
4 + 2 z −1 + 5z −2
are stable allpass transfer functions.
5 + 2 z −1 + 4 z − 2
Therefore, H 4 ( z) is BR (See solution of Problem 7.74).
7.86 Since A1 ( z) and A2 ( z) are LBR, A1 (e jω ) = 1 and A2 (e jω ) = 1. Thus,
(
)
⎛
⎞
1
⎟ = A e − jφ 2 (ω) .
A1 (e jω ) = e jφ1 (ω) and A2 (e jω ) = e jφ 2 (ω) . Now, A1 ⎜
1
⎜ A ( e jω ) ⎟
⎝ 2
⎠
⎛ 1 ⎞
⎟⎟ is LBR.
Thus, A1 e − jφ 2 (ω) = 1. Thus, A1 ⎜⎜
⎝ A2 ( z) ⎠
(
)
⎛ G ( e jω ) + α ⎞
⎛ jφ(ω) + α ⎞
⎛ G( z) + α ⎞
⎟ = e jω ⎜ e
⎟
7.87 F ( z) = z⎜⎜
⎟⎟. Thus, F (e jω ) = e jω ⎜
j
ω
j
φ
(
ω
)
⎜
⎟
⎜
⎟
⎝ 1 + αG ( z ) ⎠
⎝ 1 + αG ( e ) ⎠
⎝ 1 + αe
⎠
since G (z ) is LBR. Therefore, F (e
=
(cos(φ(ω) + α )2 + (sin(φ(ω))2
(1 + α cos(φ(ω))2 + (α sin(φ(ω))2
of F (z ). Then G( z ) z = λ =
=
jω
)
2
=
e jφ(ω) + α
2
1 + αe jφ(ω)
1 + 2α cos(φ(ω) + α 2
1 + 2α cos(φ(ω) + α 2
= 1. Let z = λ be a pole
F ( z ) − αz
1
= − , or, G(λ) = 1 / α . If α < 1, then
α
z − αF ( z ) z = λ
Not for sale
217
G(λ) > 1, which is satisfied by the LBR G (z ) if λ < 1. Hence, F (z ) is LBR. The
order of F (z ) is same as that of G (z ).
G (z ) can be realized in the form of a two-pair constrained by the transfer function
F (z ) as shown below:
Y2
X1
G(z)
F(z)
Y1
X2
To this end, we express G (z ) in terms of F (z ) arriving at
G( z) =
− α + z −1 F ( z )
=
C + D F (z)
, where A, B, C , and D are the chain
A + B F (z)
1 − α z −1 F ( z )
parameters of the two-pair. Comparing the above two expressions we get A = 1,
B = −α z −1 , C = −α, and D = z −1 . The corresponding transfer parameters are
given by t11 = −α, t 21 = 1, t12 = (1 − α 2 )z −1 and t 22 = α z −1.
1 ⎞
. Now, A(z ) being LBR, A(e jω ) = e jφ(ω) . Thus,
7.88 Let F ( z) = G⎛⎜
⎟
⎝ A( z ) ⎠
⎛ 1 ⎞
⎟ = G(e − jφ(ω) ). Since G (z ) is a BR function, G (e jω ) ≤ 1.
F (e jω ) = G⎜⎜
⎟
j
ω
⎝ A(e ) ⎠
⎛ 1 ⎞
⎟ ≤ 1.
Hence, F (e jω ) = G ⎜⎜
jω ⎟
⎝ A(e ) ⎠
Let z = ξ be a pole of F (z ) . Hence, F (z ) will be a BR function if ξ < 1. Let
z = λ be a pole of G (z ). Then this pole is mapped to the location z = ξ of F (z ) by
1
1
1
> 1 because of Eq.
= λ, or A(ξ) = . Hence, A(ξ) =
the relation
A( z ) z = ξ
λ
λ
(7.20). This implies, λ < 1. Thus, G (z ) is a BR function.
7.89 (a) H ( z) =
2.6(1 + z −1 )
4.2 + z −1
H ( z) + G( z) =
, G( z ) =
2.6(1 + z −1 )
4.2 + z
−1
+
H ( z)H ( z −1 ) + G( z )G( z −1 ) =
=
1.6(1 − z −1 )
4.2 + z −1
1.6(1 − z −1 )
4.2 + z
−1
=
. Now,
4.2 + z −1
4.2 + z
−1
= 1. Next,
) 2.6(1 + z) 1.6(1 − z −1 ) 1.6(1 − z)
⋅
+
⋅
4.2 + z
4.2 + z
4.2 + z −1
4.2 + z −1
2.6(1 + z
−1
(6.76 z + 13.52 + 6.76 z −1 ) + (−2.56 z + 5.12 − 2.56 z −1 )
4.2 z −1 + 18.64 + 4.2 z −1
Not for sale
=
4.2 z −1 + 18.64 + 4.2 z −1
4.2 z −1 + 18.64 + 4.2 z −1
218
= 1.
2
2
Thus, H (e jω ) + G(e jω ) = 1. Hence, H (z ) and G (z ) are both allpasscomplementary and power complementary. As a result, they are doubly
complementary.
(b) H ( z ) =
0.1(1 − z −2 )
1 + 0 .4 z − 1 + 0 .8 z − 2
H ( z ) + G( z ) =
, G( z) =
0.1(1 − z −2 )
1 + 0.4 z −1 + 0.8 z − 2
+
0 .9 + 0 .4 z −1 + 0 .9 z −2
1 + 0 .4 z − 1 + 0 .8 z − 2
0.9 + 0.4 z −1 + 0.9 z −2
1 + 0 .4 z − 1 + 0 .8 z − 2
=
. Now,
0 .8 + 0 .4 z −1 + z −2
1 + 0.4 z −1 + 0.8 z − 2
implying that and are allpass complementary. Next, H ( z )H ( z −1 ) + G ( z)G( z −1 )
=
0.1(1 − z −2 )
0.1(1 − z 2 )
1 + 0.4 z −1 + 0.8 z − 2 1 + 0.4 z + 0.8 z 2
=
=
⋅
+
0.9 + 0.4 z −1 + 0.9 z −2 0.9 + 0.4 z + 0.9 z 2
⋅
1 + 0 .4 z − 1 + 0 .8 z − 2
1 + 0.4 z + 0.8 z 2
( −0.01 z 2 + 0.02 − 0.01 z −2 ) + (0.81 z 2 + 0.72 z + 1.78 + 0.72 z −1 + 0.81 z −2 )
0.8 z 2 + 0.72 z + 1.8 + 0.72 z −1 + 0.8 z − 2
0.8 z 2 + 0.72 z + 1.8 + 0.72 z −1 + 0.8 z −2
= 1. Hence H (z ) and G (z ) are also
0.8 z 2 + 0.72 z + 1.8 + 0.72 z −1 + 0.8 z − 2
power complementary. As a result, they are doubly complementary.
2(2 + z −1 + 2 z −2 )
1
3 + 2 z −1 + 5z −2
= [1 + A( z)] where A( z ) =
is an
7.90 (a) H a ( z) =
2
5 + 2 z −1 + 3 z − 2
5 + 2 z −1 + 3 z − 2
allpass function. Hence, the power complementary transfer function of H a (z) is
given by G a ( z ) =
(b) H b ( z ) =
−1
−2 ⎤
−2
⎡
1
[1 − A(z)] = 1 ⎢1 − 3 + 2 z −1 + 5z − 2 ⎥ = 1 −−1z − 2 .
2
2 ⎢⎣ 5 + 2 z + 3z ⎥⎦ 5 + 2 z + 3z
3 + 7 .5 z −1 + 7 .5 z −2 + 3 z −3
8 + 8 z −1 + 4 z − 2 + z − 3
=
3 + 7 .5 z −1 + 7 .5 z − 2 + 3 z −3
2(1 + 0.5z −1 )(4 + 2 z −1 + z − 2 )
1 + 2 z −1 + 4 z −2
0.5 + z −1
1
and A1 ( z ) =
are
= [A0 ( z ) + A1 ( z )] where A0 ( z ) =
2
4 + 2 z −1 + z − 2
1 + 0.5z −1
allpass functions. Hence, the power complementary transfer function of H b (z) is
1
− 1 − 2.5z −1 + 2.5z −2 + z −3
.
given by Gb ( z ) = [A0 ( z) − A1 ( z )] =
2
8 + 8 z −1 + 4 z − 2 + z − 3
7.91 From Eq. (7.126) we have X1 = AY2 + BX 2 , Y1 = CY2 + DX 2 . From the first
1
B
equation, Y2 = X1 − X 2 . Substituting this in the second equation we get
A
A
Not for sale
219
AD − BC
C
B
⎛1
⎞
X 2 . Comparing the last two
Y1 = C ⎜ X1 − X 2 ⎟ + DX 2 = X1 +
A
A
A
⎝A
⎠
C
AD − BC
B
1
equations with Eq. (7.123) we arrive at t11 = , t12 =
, t 21 = , t 22 = − .
A
A
A
A
From Eq. (7.123) we have Y1 = t11 X1 + t12 X 2 , Y2 = t 21 X1 + t 22 X 2 . From the
t
1
Y2 . Substituting this in the first
second equation we get X1 = − 22 X 2 +
t 21
t 21
equation we get
⎛ t
⎞
t
t t −t t
1
Y1 = t11 ⎜⎜ − 22 X 2 +
Y2 ⎟⎟ + t12 X 2 = 11 Y2 + 12 21 11 22 X 2 . Comparing the
t 21 ⎠
t 21
t 21
⎝ t 21
last two equations with Eq. (7.126) we arrive at A =
t
, B = − 22 ,
t 21
t 21
1
t
t t −t t
C = 11 , D = 12 21 11 22 .
t 21
t 21
7.92 From Eq. (7.128a) we note t12 =
AD − BC = 1.
AD − BC
1
and t 21 = . Hence, t12 = t 21 imply
A
A
⎡ "⎤
⎡Y ' ⎤ ⎡k (1 − k 2 )z −1 ⎤ ⎡ X ' ⎤ ⎡Y " ⎤ ⎡k (1 − k 2 )z −1 ⎤ ⎡ X " ⎤
1
1 , 1 = 2
2
1 , where X1 =
7.93 ⎢ 1' ⎥ = ⎢ 1
⎥
⎢
⎢ "⎥
⎥
⎢
⎥
⎢
⎥
⎢
⎥
− k 2 z −1 ⎥⎦ ⎢⎣ X 2" ⎥⎦
− k1 z −1 ⎥⎦ ⎢⎣ X 2' ⎥⎦ ⎢⎣Y2" ⎥⎦ ⎢⎣ 1
⎢⎣ X 2 ⎥⎦
⎢⎣Y2 ⎥⎦ ⎢⎣ 1
⎡Y ' ⎤
⎢ 1' ⎥ . The transfer matrices of the two two-pairs are given by
⎣⎢Y2 ⎦⎥
⎡k
⎡k (1 − k 2 )z −1 ⎤
1
2
τ1= ⎢ 1
and
τ
=
⎥
2 ⎢
−1
− k1 z
⎥⎦
⎢⎣ 1
⎢⎣ 1
(1 − k 22 )z −1 ⎤
⎥. The corresponding chain
− k 2 z −1 ⎥⎦
⎡1
matrices are obtained using Eq. (7.128b) and are given by Γ 1 = ⎢
⎣⎢k1
k1 z −1 ⎤
⎥ and
z −1 ⎦⎥
⎡ 1 k z −1 ⎤
2
Γ2= ⎢
⎥. Therefore, the chain matrix of the Γ-cascade is given by
z −1 ⎥⎦
⎢⎣k 2
⎡ 1 k z −1 ⎤ ⎡ 1 k z −1 ⎤ ⎡1 + k k z −1 k z −1 + k z −1 ⎤
1
2
1 2
2
1
Γ1Γ 2 = ⎢
. Next using Eq.
=
−1 ⎥ ⎢
−1 ⎥ ⎢
−1
−1
−2 ⎥
k
z
k
z
k
k
z
k
k
z
z
+
+
2
1 2
⎦⎥
⎦⎥ ⎣⎢ 1
⎦⎥ ⎣⎢ 2
⎣⎢ 1
(7.128a) we arrive at the transfer matrix of the Γ-cascade as
Not for sale
220
⎡ k + k z −1
2
⎢ 1
⎢1 + k1k 2 z −1
τ =⎢
1
⎢
⎢ 1 + k k z −1
1 2
⎣
z − 2 (1 − k12 )(1 − k 22 ) ⎤
⎥
⎥
1 + k1k 2 z −1
.
−1
−1 ⎥
z (k 2 + k1 z ) ⎥
⎥
1 + k1k 2 z −1
⎦
⎡ Y ' ⎤ ⎡X " ⎤
k2 z −1 ⎤ ⎡ Y2" ⎤
,
where
⎢ 2' ⎥ = ⎢ 1" ⎥. The
−1 ⎥ ⎢ " ⎥
z
⎥⎦ ⎢⎣ X 2 ⎥⎦
⎢⎣ X 2 ⎥⎦ ⎢⎣Y1 ⎥⎦
⎡ 1 k z −1 ⎤
1
chain matrices of the two two-pairs are given by Γ 1 = ⎢
and
−1 ⎥
⎣⎢k1 z ⎦⎥
⎡X ' ⎤ ⎡ 1
7.94 ⎢ 1' ⎥ = ⎢
⎢⎣ Y1 ⎥⎦ ⎢⎣k1
⎡1
Γ2= ⎢
⎢⎣k 2
k1 z −1 ⎤ ⎡ Y2' ⎤
⎥⎢ ⎥
z −1 ⎥⎦ ⎢⎣ X 2' ⎥⎦
⎡X " ⎤ ⎡ 1
⎢ 1" ⎥ = ⎢
⎢⎣Y1 ⎥⎦ ⎢⎣k 2
k 2 z −1 ⎤
⎥. The corresponding transfer matrices are obtained using Eq.
z −1 ⎥⎦
⎡k (1 − k 2 )z −1 ⎤
⎡k (1 − k 2 )z −1 ⎤
1
2
2
(7.128a) and are given by τ 1 = ⎢ 1
and
τ
=
⎥. The
⎥
2 ⎢
−1
− k 2 z −1 ⎦⎥
− k1 z
⎦⎥
⎣⎢ 1
⎣⎢ 1
transfer matrix τ of the τ-cascade is therefore given by
⎡k (1 − k 2 )z −1 ⎤ ⎡k (1 − k 2 )z −1 ⎤
2
1
1
τ 2 τ1= ⎢ 2
⎥
−1 ⎥ ⎢
− k2 z
− k1z −1 ⎥⎦
⎥⎦ ⎢⎣ 1
⎢⎣ 1
⎡k k + z −1 (1 − k 2 ) z −1k (1 − k 2 ) − z − 2 k (1 − k 2 ) ⎤
2
2
1
1
2
. Using Eq. (7.128b) we thus
=⎢ 1 2
−1
−1
2
−1
2 −2 ⎥
k
k
z
z
k
z
k
k
z
(
1
)
(
1
)
−
−
+
−
1
2
1
2
1
⎦⎥
⎣⎢
arrive at the chain matrix of the τ-cascade as
⎡
− (k1k 2 z −1 + 1 − k12 )z −1 ⎤
1
⎢
⎥
⎢
⎥
k1 − k 2 z −1
k1 − k 2 z −1
Γ= ⎢
⎥.
−1
2
−2
+
−
k
k
z
k
(
1
)
z
1
2
2
⎢
⎥
−1
−1
⎢
⎥
−
−
k
k
z
k
k
z
1
2
1
2
⎣
⎦
7.95 (a) Analyzing Figure P7.10(a) we obtain Y2 = X1 − k m z −1 X 2 and
2 −1
Y1 = k m Y2 + z −1 X 2 = k m ( X1 − k m z −1 X 2 ) z −1 X 2 = k m X1 + (1 − k m
)z X 2 .
2 −1 ⎤
⎡k
(1 − k m
)z
m
=
Hence, the transfer matrix is given by τ ⎢
⎥. Using Eq. (7.128b)
− k m z −1 ⎦⎥
⎣⎢ 1
⎡1
we then arrive at the chain matrix Γ = ⎢
⎢⎣ k m
Not for sale
k m z −1 ⎤
⎥.
z −1 ⎥⎦
221
(b) Labeling V1 the output variable of the top left adder connected to input X1 we
then analyze Figure P7.10(b) and obtain V1 = k m ( X 1− z −1 X 2 ), Y1 = V1 + X 1
= (1 + k m ) X 1− k m z −1 X 2 , and Y2 = V1 + z −1 X 2 = k m X1 + (1 − k m ) z −1 X 2 . Hence,
⎡1 + k
− k m z −1 ⎤
m
the transfer matrix of the two-pair is given by τ = ⎢
⎥. Using
(1 − k m )z −1 ⎦⎥
⎣⎢ k m
⎡ 1
⎢
Eq. (7.128b) we then arrive at the chain matrix Γ = ⎢ k m
⎢1 − k m
⎢
⎣ km
7.96 Solving G( z) =
−
(1 − k m )z −1 ⎤
⎥
km
⎥.
⎥
1
−
⎥
km
⎦
k + z −1G( z )
for H (z ) we get H ( z) = m
.
z −1[1 − k m H ( z)]
1 + k m z −1G( z)
H ( z) − k m
For the constrained two-pair H ( z ) =
C + D ⋅ G( z)
. Comparing the last two
A + B ⋅ G( z)
equations we thus get C = k m , D = z −1 , A = 1, B = k m z −1 . Substituting these
values of the chain parameters in Eq. (7.128a) we get
C
AD − BC
1
B
2
t11 = = k m , t12 =
= z −1 (1 − k m
), t 21 = = 1, t 22 = − = − k m z −1 .
A
A
A
A
7.97 (a) H ( z ) =
α + z −1G ( z )
1 + αz −1G( z )
. For the constrained two-pair H ( z ) =
C + D ⋅ G( z)
.
A + B ⋅ G( z)
Comparing the last two equations we thus get C = α, D = z −1 , A = 1, B = αz −1 .
(b)
7.98 From the results of Problem 7.95, Part (a), we observe that the chain matrix of the
⎡ 1 k z −1 ⎤
i
i -th lattice two-pair is given by Γ i = ⎢
⎥, i = 1, 2, 3. Thus, the chain matrix
z −1 ⎥⎦
⎢⎣ ki
of the cascade of the three lattice two-pairs is given by
⎡ 1 k z −1 ⎤ ⎡ 1 k z −1 ⎤ ⎡ 1 k3 z −1 ⎤
1
2
Γ cascade = ⎢
⎥
⎥⎢
−1 ⎥ ⎢
z −1 ⎦⎥ ⎣⎢ k3
z −1 ⎦⎥
⎦⎥ ⎣⎢ k 2
⎣⎢ k1 z
⎡ 1 + k k z −1 + k z −1 (k + k z −1 )
k3 z −1 + k 2 z −1 + k1 z −1 (k 2 k3 + z − 2 ) ⎤
2 3
1
2
3
=⎢
.
−1
−1
−1
−1
−1
−1
−2 ⎥
⎢⎣ k1 (1 + k 2 k3 z ) + z (k 2 + k3 z ) k1 (k3 z + k 2 z ) + z (k 2 k3 + z )⎥⎦
C+D
From Eq. (7.135a) we obtain A3 ( z ) =
A+ B
Not for sale
222
1 + (k2 k3 + k1k2 + k3 )z −1 + (k1k3 + k 2 + k1k 2 k3 )z −2 + k1 z −3
which is seen to be
k1 + (k1k3 + k 2 + k1k 2 k3 )z −1 + (k 2 k3 + k1k 2 + k3 )z − 2 + z − 3
an allpass function.
=
7.99 Let
D( z) = 1 + d1 z −1 + d 2 z −2 = (1 − λ1 z −1 )(1 − λ2 z −1 ) = 1 − ( λ1 + λ2 )z −1 + λ1 λ2 z −2 .
Thus, d 2 = λ1 λ2 and d1 = −( λ1 + λ2 ). For stability, λi < 1, i = 1, 2. As a result,
d 2 = λ1 λ2 < 1.
Case 1: Complex poles: d 2 > 0. In this case, λ2 = λ*1 . Now,
λ1 , λ2 =
− d1 ± d12 − 4d 2
. Hence, λ1 and λ2 will be complex, if d12 < 4d 2 . In
2
d
j
4d 2 − d12 . Thus,
this case, λ1 = − 1 +
2 2
Consequently, if the poles are complex and
circle.
λ1
2
=
1
4
(d12 + 4d2 − d12 ) = d2 < 1.
d 2 < 1, then they are inside the unit
Case 2: Real poles. In this case we get − 1 < λi < 1, i = 1, 2. Since, λi < 1, it follows
then d1 < λ1 + λ2 < 2. Now, − 1 <
− d1 ± d12 − 4 d 2
2
< 1, or
± d12 − 4 d 2 < 2 + d1 . It is not possible to satisfy the inequality on the right hand
side with a minus sign in front of the square root as it would imply then d1 < −2.
Therefore,
d12 − 4d 2 < 2 + d1 , or d12 − 4 d 2 < 4 + d12 + 4d1 , or − d1 < 1 + d 2 .
Similarly,
− d1 ± d12 − 4d 2
(7-x)
< −1, or ± d12 − 4d 2 > −2 + d1 . Again it is not
2
possible to satisfy the inequality on the right hand side with a plus sign in front of
the square root as it would imply then d1 > 2. Therefore, − d12 − 4 d 2 > −2 + d1 ,
or
d12 − 4d 2 < 2 − d1 , or d12 − 4 d 2 < 4 + d12 − 4d1 , or equivalently,
d1 < 1 + d 2 .
(7-y)
Combining Eqs. (7-x) and (7-y) we get d1 < 1 + d 2 .
7.100 (a) D a ( z ) = 4(1 + 0.75z −1 + 0.25z −2 ) ⇒ d 1= 0.75, d 2 = 0.5. Since
d 2 = 0.5 < 1 and 1 + d 2 = 1.5, d1 = 0.75 < 1 + d 2 . Hence, both roots of Da (z ) are
inside the unit circle.
Not for sale
223
(b) Db ( z ) = 2(1 + 0.5z −1 + 0.5z −2 ) ⇒ d 1= 0.5, d 2 = 0.5. Since d 2 = 0.5 < 1 and
1 + d 2 = 1.5, d1 = 0.5 < 1 + d 2 . 1 + d 2 = 1.5, d1 = 0.75 < 1 + d 2 . Hence, both
roots of Db (z ) are inside the unit circle.
(c) Dc ( z) = 3(1 + z −1 − z − 2 ) ⇒ d 1= , d 2 = − . Since d 2 = > 1, at least
3
3
3
3
3
one root of Dc (z ) is outside the unit circle.
4
4
4
4
4
(d) Dd ( z) = 3(1 − z −1 − z − 2 ) ⇒ d 1= − , d 2 = − . Since d 2 = < 1 and
3
3
3
6
6
1
1
1
1
1
1
2
1 + d 2 = , d1 = < 1 + d 2 . Hence, both roots of Dd (z) are inside the unit circle.
3
3
7.101 (a) A3 ( z) =
0.25 + 0.5z −1 + 0.75z −2 + z −3
1 + 0.75z −1 + 0.5z − 2 + 0.25z − 3
(7.148) we arrive at A2 ( z ) =
+ z −1 + z − 2
1
3
2
3
1
. Here, k 2 = < 1. Continuing this
1
2
3
1 + z −1 + z − 2
0.5 + z
process we get A1 ( z) =
. Note k3 = 0.25 < 1. Using Eq.
3
−1
1 + 0.5z −1
3
. Finally, k1 = 0.5 < 1. Since ki < 1, i = 1, 2, 3,
H a (z) is stable.
(b) A3 ( z) =
− − z −1 + z − 2 + z − 3
1
3
2
3
2 −1
z
3
1+
arrive at A2 ( z) =
−
2
3
2 −2 1 −3
z − z
3
3
−1
−2
− 0.5 + 0.5z
+z
1 + 0.5z −1 − 0.5z − 2
process we get A1 ( z ) =
1 + z −1
1 + z −1
. Note k3 =
1
3
< 1. Using Eq. (7.148) we
. Here, k 2 = 0.5 < 1. Continuing this
. Finally, k1 = 1. Since k1 is not less than 1 ,
H b (z) is not stable.
(c) A4 ( z) =
− + z −1 + z − 2 + z − 3 + z − 4
1
6
1+
1
2
2 −1
z
3
we get A3 ( z) =
+
2
3
2 −2
z
3
+
2
3
1 −3 1 − 4
z − z
6
2
−1
0.6286 + 0.8z
+ 0.7714z −2 + z −3
1 + 0.7714z −1 + 0.8z − 2 + 0.6286z − 3
Using Eq. (7.148) we next get A2 ( z) =
1
. Note k 4 = < 1. Using Eq. (7.148)
6
. Note k3 = 0.6286 < 1.
0.5209 + 0.444z −1 + z −2
1 + 0.444z −1 + 0.5209z − 2
Not for sale
. Here,
224
k 2 = 0.209 < 1. Continuing this process we get A1 ( z) =
0.2919 + z −1
1 + 0.2919z −1
k1 = 0.2919 < 1. Since ki < 1, i = 1, 2, 3, 4, H c (z ) is stable.
(d) A4 ( z) =
0.2 + 0.4 z −1 + 0.6 z − 2 + 0.8 z − 3 + z − 4
1 + 0.8z −1 + 0.6 z − 2 + 0.4 z
Eq. (7.148) we get A3 ( z) =
2
3
−3
+ 0.2 z − 4
. Note k 4 = 0.2 < 1. Using
0.25 + 0.5z −1 + 0.75z −2 + z −3
. Note k3 = 0.25 < 1.
1 + 0.75z −1 + 0.5z − 2 + 0.25z − 3
Using Eq. (7.148) we next get A2 ( z ) =
Continuing this process we get A1 ( z) =
1
3
+ z −1 + z − 2
1+
2
3
2 −1 1 − 2
z + z
3
3
−1
0.5 + z
1 + 0.5z −1
. Finally,
1
. Here, k 2 = < 1.
3
. Finally, k1 = 0.5 < 1. Since
ki < 1, i = 1, 2, 3, 4, H d (z) is stable.
(e) A5 ( z) =
0.1 + 0.2 z
−1
−1
+ 0.3z −2 + 0.5z −3 + 0.7z −4 + z −5
1 + 0.7z + 0.5z − 2 + 0.3z − 3 + 0.2 z − 4 + 0.1z − 5
Using Eq. (7.148) we get
A4 ( z ) =
. Note k 5 = 0.1 < 1.
0.1313 + 0.2525z −1 + 0.4747 z −2 + 0.6869z −3 + z −4
1 + 0.6869z −1 + 0.4747 z − 2 + 0.2525z − 3 + 0.1313z − 4
k 4 = 01313 < 1. Using Eq. (7.148) we next get
A3 ( z) =
0.1652 + 0.4196z −1 + 0.6652z −2 + z −3
1 + 0.6652z −1 + 0.4196z − 2 + 0.1652z − 3
Eq. (7.148) we next get A2 ( z ) =
. Note
. Note k3 = 0.1652 < 1. Using
0.3185 + 0.6126z −1 + z −2
1 + 0.6126z −1 + 0.3185z − 2
k 2 = 0.3185 < 1. Continuing this process we get A1 ( z) =
. Here,
0.4646 + z −1
1 + 0.4646z −1
k1 = 0.4646 < 1. Since ki < 1, i = 1, 2, 3, 4, 5, H e (z) is stable.
7.102
(a) A5 ( z ) =
0.1 + 0.2 z
−1
−1
+ 0.4 z −2 + 0.6 z −3 + 0.8z −4 + z −5
1 + 0.8z + 0.6 z − 2 + 0.4 z − 3 + 0.2 z − 4 + 0.1z − 5
k 5 = 0.1 < 1. Using Eq. (7.148) we get
A4 ( z ) =
0.1212 + 0.3434z −1 + 0.5657 z −2 + 0.7879z −3 + z −4
1 + 0.7879z −1 + 0.5657 z − 2 + 0.3434z − 3 + 0.1212z − 4
k 4 = 0.1211 < 1. Using Eq. (7.148) we next get
Not for sale
. Finally,
. Note
. Note
225
A3 ( z) =
0.2516 + 0.5045z −1 + 0.7574z −2 + z −3
1 + 0.7574z −1 + 0.5045z − 2 + 0.2516z − 3
Eq. (7.148) we next get A2 ( z ) =
. Note k3 = 0.2516 < 1. Using
0.3351 + 0.6730z −1 + z −2
1 + 0.6730z −1 + 0.3351z − 2
. Here,
0.5041 + z −1
k 2 = 0.3351 < 1. Continuing this process we get A1 ( z ) =
. Finally,
1 + 0.5041z −1
k1 = 0.5041 < 1. Since ki < 1, i = 1, 2, 3, 4, 5, D a (z) has all roots inside the unit
circle..
(b) A5 ( z) =
− 0.25 + 0.5z −1 + 0.625z −2 + 0.75z −3 + 0.875z −4 + z −5
1 + 0.875z −1 + 0.75z − 2 + 0.625z − 3 + 0.5z − 4 − 0.25z − 5
k 5 = 0.25 < 1. Using Eq. (7.148) we get
A4 ( z ) =
0.7667 + 0.8667 z −1 + 0.9667 z −2 + 1.0667 z −3 + z −4
1 + 1.0667 z −1 + 0.9667 z − 2 + 0.8667 z − 3 + 0.7667 z − 4
k 4 = 0.7667 < 1. Using Eq. (7.148) we next get
A3 ( z ) =
0.1186 + 0.5472z −1 + 0.9757 z −2 + z −3
1 + 0.9757z −1 + 0.5472z − 2 + 0.1186z − 3
Eq. (7.148) we next get A2 ( z ) =
. Note
. Note
. Note k3 = 0.1186 < 1. Using
0.4376 + 0.9238z −1 + z −2
1 + 0.9238z −1 + 0.4376z − 2
k 2 = 0.4376 < 1. Continuing this process we get A1 ( z) =
. Here,
0.6426 + z −1
. Finally,
1 + 0.6426z −1
k1 = 0.6426 < 1. Since ki < 1, i = 1, 2, 3, 4, 5, D b (z) has all roots inside the unit
circle..
M7.1 The MATLAB code fragments used to simulate the FIR filter are
b = [3.8461 -6.3487 3.8461];zi = [0 0];
n=0:49;x1 = cos(0.3*n);x2=cos(0.6*n);
y = filter(b,1,x1+x2,zi);
The plot generated by the above program is shown below:
2
y[n]
x 1[n]
x 2[n]
Amplitude
1.5
1
0.5
0
-0.5
-1
0
10
20
30
Time index n
Not for sale
40
226
M7.2 The MATLAB code fragments used to simulate the FIR filter are:
b =[17.7761 -58.7339 83.8786 -58.7339 17.7761];
n = 0:49; x1 = cos(0.3*n);x2=cos(0.5*n);x3=cos(0.8*n);
y = filter(b,1,x1+x2+x3);
The plot generated by the above program is shown below:
3
Amplitude
2
1
0
-1
-2
-3
y[n]
x1[n]+x3[n]
0
10
20
30
Time index n
40
M7.3 The gain response of H (z ) is shown below:
20
0
Gain, dB
-20
-40
-60
-80
-100
0
0.2
0.4
0.6
0.8
1
ω/ π
M7.4 (a) The MATLAB code fragments used to evaluate H ( z)H ( z −1 ) + H (− z)H (− z −1 ) is
shown below:
n = [1 -2 3.5];n = [n fliplr(n)];
d = [8 0 -2 0 -1 0];
k = 0:5;n1 = (-1).^k.*n;
a = conv(n,fliplr(n))+conv(n1,fliplr(n1));
b = conv(d,fliplr(d));
The numerator and denominator of are H ( z)H ( z −1 ) + H (− z)H (− z −1 ) given by
the vectors a and b :
a =
0
-8
0 -14
0
69
0 -14
0
-8
0
b =
0
-8
0 -14
0
69
0 -14
0
-8
0
Hence H ( z )H ( z −1 ) + H (− z)H (− z −1 ) = 1 verifying the power-complementary
property of H (z ) and H ( − z ).
Not for sale
227
(b) The MATLAB code fragments used to evaluate H ( z)H ( z −1 ) + H (− z)H (− z −1 ) is
shown below:
n = [1 1.5 5.25 7.25];n = [n fliplr(n)];
d = [12 0 13 0 4.5 0 0.5 0];
k = 0:7;n1 = (-1).^k.*n;
a = conv(n,fliplr(n))+conv(n1,fliplr(n1));
b = conv(d,fliplr(d));
The numerator and denominator of are H ( z)H ( z −1 ) + H (− z)H (− z −1 ) given by
the vectors a and b :
a =
Columns 1 through 10
0
6.0000
0
60.5000
0 216.7500
0 333.5000
0 216.7500
Columns 11 through 15
0
60.5000
0
6.0000
0
b =
Columns 1 through 10
0
6.0000
0
60.5000
0 216.7500
0 333.5000
0 216.7500
Columns 11 through 15
0
60.5000
0
6.0000
0
Hence H ( z )H ( z −1 ) + H (− z)H (− z −1 ) = 1 verifying the power-complementary
property of H (z ) and H ( − z ).
M7.5 The magnitude and phase responses of H (z ) are shown below:
4
phase, radians
Magnitude
1
0.8
0.6
0.4
2
0
-2
0.2
0
0
0.2
0.4
0.6
0.8
1
-4
0
0.2
0.4
ω/π
0.6
0.8
1
ω/π
From the magnitude response plot given above it can be seen that represents a
highpass filter. The difference equation representation of H (z ) is given by
y[ n] + 0.7074 y[ n − 1] + 0.7976 y[ n − 2] + 0.2004 y[ n − 3]
= 0.2031x[ n] − 0.2588 x[ n − 1] + 0.2588 x[ n − 2] − 0.2031x[ n − 3].
M7.6 The magnitude and phase responses of H (z ) are shown below:
Not for sale
228
5
4
phase, radians
Magnitude
4
3
2
1
0
0
0.2
0.4
0.6
0.8
2
0
-2
-4
1
0
ω/π
0.2
0.4
0.6
0.8
1
ω/π
From the magnitude response plot given above it can be seen that represents a
bandpass filter. The difference equation representation of H (z ) is given by
y[ n] + 0.6402 y[n − 1] + 1.7497 y[ n − 2] + 0.5354 y[ n − 3] + 0.7015 y[ n − 4]
= 0.2031x[ n] − 0.2588 x[ n − 1] + 0.2588 x[ n − 2] − 0.2031x[ n − 3].
M7.7 Here K = 5. Using Eq. (7.85) we obtain first C = 1.7411. Then using Eq. (7.84)
we obtain α = −0.3779. From Eq. (7.71) we get the transfer function of the
lowpass filter as H LP ( z ) =
0.6889(1 + z -1 )
. A plot of the gain response of a
1 − 0.3779 z −1
cascade of 5 lowpass filters is shown below:
Passband Details
5
-1
-2
Gain, in dB
Gain, in dB
0
-5
-10
-15
-20
-25
-30
-3
-4
-5
0
0.2
0.4
0.6
0.8
1
ω/π
0.4 0.42 0.44 0.46 0.48 0.5 0.52
ω/π
M7.8 From the solution of Problem 7.46 we observe
sin ωc 2C − C 2 − (1 − cos ωc + C cosωc )
, where C = 2 ( K −1) / K .
α=
1 − cos ωc − C
Substituting K = 6 in the second equation we get C = 1.7818. Next, substituting
this value of C and ωc = 0.4 π in the first equation we arrive at α = 0.5946.
From Eq. (7.74) we get the transfer function of the lowpass filter as
H HP ( z ) =
0.7973(1 − z -1 )
. A plot of the gain response of a cascade of 6
1 − 0.5946 z −1
highpass filters is shown below:
Not for sale
229
Passband Details
5
-2
-4
Gain, in dB
Gain, in dB
0
-5
-10
-15
-20
-8
-10
-25
-30
-6
-12
0
0.2
0.4
0.6
0.8
0.2
1
0.3
0.4
ω/ π
ω/ π
0.5
0.6
M7.9 Using Eq. (7.73b) we obtain α = −0.1584. Sunstituting this value of α in Eqs.
0.4208(1 − z -1 )
.
and H HP ( z ) =
1 − 0.1584 z −1
1 − 0.1584 z −1
Plots of the magnitude responses of H LP (z ) and H HP (z ) along with the plot of
the magnitude response of H LP ( z ) + H HP ( z ) and plot of
(7.71) and (7.74) we get H LP ( z ) =
2
2
H LP (e jω ) + H HP(e jω )
0.5792(1 + z -1 )
are shown below verifying the doubly complementary
property of H LP (z ) and H HP (z ).
1
jω
HLP(z)
HHP(z)
Magniitude
Magniitude
0.8
0.6
0.4
0.2
0
jω
|HLP(e )+HHP(e )|
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
0
1
0
0.2
0.4
ω/ π
jω 2
Square Magniitude
0.6
0.8
1
ω/ π
jω 2
|HLP(e )| +|HHP(e )|
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
M7.10 From Eq. (7.78) we arrive at the quadratic equation α 2 − 2.8284 α + 1 = 0 whose
solution yields α = 0.4142 and α = 2.4142. A stable bandpass and bandstop
transfer function requires α < 1. Hence we choose α = 0.4142. Next, from Eq.
Not for sale
230
(7.76) we get β = 0.3090. Substituting these two parameters in Eqs. (7.77) and
(7.80) we obtain H BP ( z ) =
H BS ( z ) =
0.2929(1 − z −2 )
1 − 0.4370 z −1 + 0.4142 z − 2
and
0.7071(1 − 0.6180 z -1 + z −2 )
. Plots of the magnitude responses of
1 − 0.4370 z −1 + 0.4142 z − 2
H BP (z ) and H BS (z ) along with the plot of the magnitude response of
2
H BP ( z ) + H BS ( z ) and plot of H BP(e jω ) + H BS (e jω )
2
are shown below
verifying the doubly complementary property of H BP (z ) and H BS (z ).
0.8
0.6
0.4
0.2
0
jω
|HBP(e )+HBS(e )|
1
Magniitude
Magniitude
jω
HBS(z)
HBP(z)
1
0.8
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
0
1
0
0.2
0.4
ω/ π
jω 2
Square Magniitude
0.6
0.8
1
ω/ π
jω 2
|HBP(e )| +|HBS(e )|
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
M7.11 From Eq. (7.78) we arrive at the quadratic equation α 2 − 2.4721α + 1 = 0 whose
solution yields α = 0.5095 and α = 1.9626. A stable bandpass transfer function
requires α < 1. Hence we choose α = 0.5095. Next, from Eq. (7.76) we get
β = −0.3090. Substituting these two parameters in Eqs. (7.77) we obtain
H BP ( z ) =
0.2453(1 − z −2 )
1 + 0.4665 z −1 + 0.5095 z − 2
H BP (z ) is shown below:
. A plot of the magnitude response of
Not for sale
231
Magniitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
M7.12 From Eq. (7.78) we arrive at the quadratic equation α 2 − 2.4721α + 1 = 0 whose
solution yields α = 0.5095 and α = 1.9626. A stable bandstop transfer function
requires α < 1. Hence we choose α = 0.5095. Next, from Eq. (7.80) we get
β = −0.3090. Substituting these two parameters in Eqs. (7.77) we obtain
H BS ( z ) =
0.7548(1 + 0.6180 z −1 + z −2 )
1 + 0.4665 z −1 + 0.5095 z − 2
H BS (z ) is shown below:
. A plot of the magnitude response of
Magniitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
M7.13 A plot of the magnitude response of H BP ( z ) + H BS ( z ) and plot of H BP(e jω )
+ H BS (e jω )
2
2
are shown below verifying the doubly complementary property of
H BP (z ) and H BS (z ).
Not for sale
232
j
Square Magniitude
Magniitude
j
0.8
0.6
0.4
0.2
0
0
0.2
|HBP(e ω )| +|HBS(e ω )|
j
|HBP(e ω )+HBS(e ω )|
1
0.4
0.6
0.8
1
j
2
0.8
0.6
0.4
0.2
0
1
2
0
0.2
0.4
ω/ π
0.6
0.8
1
ω/ π
M7.14 (a)
jω
jω 2
Square Magnitude
Magnitude
jω
|H(e )+G(e )|
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
0.8
0.6
0.4
0.2
0
1
jω 2
|H(e )| +|G(e )|
1
0
0.2
0.4
ω/π
0.6
A plot of the magnitude response of H ( z ) + G ( z ) and plot of H (e jω )
+ G ( e jω )
0.8
1
ω/π
2
2
are shown above verifying the doubly complementary property of H (z )
and G (z ).
(b)
jω
jω
jω 2
|H(e )+G(e )|
Square Magnitude
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
jω 2
|H(e )| +|G(e )|
1
0.8
1
ω/π
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
A plot of the magnitude response of H ( z ) + G ( z ) and plot of H (e jω )
+ G ( e jω )
0.8
1
ω/π
2
2
are shown above verifying the doubly complementary property of H (z )
and G (z ).
Not for sale
233
M7.15 (a) The pole-zero plot obtained using the M-file zplane is shown below:
Ha(z)
1
0.5
0.8
Magnitude
Imaginary Part
1
0
-0.5
0.6
0.4
0.2
-1
-1.5
-1
-0.5
0
0.5
Real Part
1
0
1.5
0
0.2
0.4
0.6
0.8
1
ω/π
It can be seen from the above pole-zero plot that the two poles of H a (z ) are
inside the unit circle and hence H a (z ) is stable. From the magnitude response
plot given above, we observe that H a (e jω ) ≤ 1 and hence, H a (z ) is a BR
function.
(b) The pole-zero plot obtained using the M-file zplane is shown below:
Hb(z)
1
0.8
Magnitude
Imaginary Part
1
0.5
0
-0.5
0.6
0.4
0.2
-1
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
0
0
0.2
0.4
0.6
0.8
1
ω/π
It can be seen from the above pole-zero plot that the three poles of H b (z ) are
inside the unit circle and hence H b (z ) is stable. From the magnitude response
plot given above, we observe that H a (e jω ) ≤ 1 and hence, H a (z ) is a BR
function.
M7.16 (a) The power-complementary transfer function G a ( z) = Q( z) / D( z ) to the
transfer function H a ( z ) = P( z ) / D( z) satisfy the relation G a ( z )G a ( z −1 )
= 1 − H a ( z ) H a ( z −1 ), or equivalently the relation Q( z )Q( z −1 ) = D( z ) D( z −1 )
− P( z)P ( z −1 ). Here, D( z ) = 1 + 0.4 z −1 + 0.6 z −2 and
P( z) = 0.8 + 0.4 z −1 + 0.8z −2 .
(b)
Not for sale
234
M7.17 (a) The pole-zero plot of H a (z ) obtained using the M-file zplane is shown
below. From this plot it can be seen that all 3 poles of H a (z ) are inside the unit
circle, and hence, H a (z ) is a stable transfer function.
Ha(z)
Imaginary Part
2
1
0
-1
-2
-2
0
Real Part
2
(b) The pole-zero plot of H b (z ) obtained using the M-file zplane is shown
below. From this plot it can be seen that one pole of H b (z ) is on the unit circle,
and hence, H b (z ) is an unstable transfer function.
Hb(z)
Imaginary Part
3
2
1
0
-1
-2
-3
-2
0
2
4
Real Part
6
8
(c) The pole-zero plot of H c (z ) obtained using the M-file zplane is shown
below. From this plot it can be seen that all 4 poles of H c (z ) are inside the unit
circle, and hence, H c (z ) is a stable transfer function.
Hc (z)
Imaginary Part
2
1
0
-1
-2
-3
-2
-1
0
1
Real Part
Not for sale
2
3
235
(d) The pole-zero plot of H d (z ) obtained using the M-file zplane is shown
below. From this plot it can be seen that all 4 poles of H d (z ) are inside the unit
circle, and hence, H d (z ) is a stable transfer function.
Hd(z)
Imaginary Part
1
0.5
4
0
-0.5
-1
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
(e) The pole-zero plot of H e (z ) obtained using the M-file zplane is shown
below. From this plot it can be seen that all 5 poles of H e (z ) are inside the unit
circle, and hence, H e (z ) is a stable transfer function.
He(z)
Imaginary Part
1
0.5
5
0
-0.5
-1
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
M7.18 (a) The output data generated by running Program 7_2 are:
The stability test parameters are
0.2500
0.3333
0.5000
stable =
1
Hence, H a (z ) is a stable transfer function.
(b) The output data generated by running Program 7_2 are:
The stability test parameters are
-0.3333
-0.5000
1.0000
stable =
0
Not for sale
236
Hence, H b (z ) is an unstable transfer function.
(c) The output data generated by running Program 7_2 are:
The stability test parameters are
-0.1667
0.6286
0.5209
0.2919
stable =
1
Hence, H c (z ) is a stable transfer function.
(d) The output data generated by running Program 7_2 are:
The stability test parameters are
0.2000
0.2500
0.3333
0.5000
stable =
1
Hence, H d (z ) is a stable transfer function.
(e) The output data generated by running Program 7_2 are:
The stability test parameters are
0.1000
0.1313
0.1652
0.3185
stable =
1
0.4646
Hence, H e (z ) is a stable transfer function.
M7.19 (a) The output data generated by running Program 7_2 are:
The stability test parameters are
0.1000
0.1212
0.2516
0.3351
stable =
1
0.5041
Hence, all roots of Da (z ) are inside the unit circle.
(b) The output data generated by running Program 7_2 are:
(c)
The stability test parameters are
-0.2500
0.7667
0.1186
0.4376
0.6426
stable =
1
Hence, all roots of Db (z ) are inside the unit circle.
Not for sale
237
k
M7.20 H ( z ) = − + ⎛⎜ 1 +
4 ⎝
k ⎞ −1
⎟z
4⎠
− z−2.
k
4
3
k=2
Magnitude
2.5
2
k=1
1.5
1
0
0.2
0.4
0.6
0.8
1
ω/π
k
k
k
k ⎞
k
k
⎛
M7.21 H ( z ) = − 2 + 1 z −1 + ⎜ 1 − 1 + 2 ⎟ z − 2 + 1 z − 3 − 2 z − 4 .
4
4
4
4 ⎠
4
4
⎝
5
k 1=2, k 2=-4
Magnitude
4
3
2
k 1=1, k 2=-2
1
0
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
238
Chapter 8
8.1
Analyzing Figure P8.1, we get w[n] = A( X [n] + CDu[n]) and
y[n] = C ( ABx[n] + u[n]). A direct implementation of these two equations leads to
the structure shown below which has no delay-free loop.
A
w[n]
x[n]
AB
CD
y[n]
8.2
C
u[n]
(a) Figure P8.2(a) with input and output nodes removed and delays removed is as
shown below. There are two delay-free loops in the reduced structure shown
below. Analysis of this structure yields
W3
W1
α1
k1
U2
k2
W2 U 3
U1
(1): W1 = W3 + U 2 , (2): W2 = α1W1 + U1 , (3): W3 = k1W3 + k 2W2 + U 2 .
From Eq. (3) we get (4): (1 − k1 )W3 − k 2W2 = U 2 , and from Eq. (1) we get
W3 = W1 − U 2 . Substituting the last equation in Eq. (4) we get
(1 − k1 )W1 − k 2W2 = (1 − k1 )U 2 + U 3 and from Eq. (2) we have − α1W1 + W2 = U1.
k
1 − k1
1
U 2 + U 3 and
Solving the last two equations we arrive at W1 = 2 U 1 +
∆
∆
∆
α (1 − k1 )
α
1 − k1
W2 =
U1 + 1
U 2 + 1 U 3 . A realization based on the above two
∆
∆
∆
equations after insertion of the input and output nodes and the delays is shown
below which has no delay-free loops.
Y (z)
W1
(1_ k1)/∆
U2
k 2 /∆
α2
X(z)
_1
z
(1_ k1)/∆
U1
Not for sale
1/∆
α1
W2
_
z1
U3
239
(b) Figure P8.2(b) with input and output nodes removed and delays removed is as
shown below. There is one delay-free loop in the reduced structure shown below.
Analysis of this structure yields
δ
U1
W1 U2
W2
β
U3
(1): W1 = U1 + δW2 , and (2): W2 = U 2 + βW1 + U 3 . Substituting Eq. (1) in Eq. (2)
β
1
1
we get after some algebra (3): W2 = U 1 + U 2 + U 3 , where ∆ = 1 − βδ.
∆
∆
∆
δ
βδ
δ
Substituting Eq. (3) in Eq. (1) we get (5): W1 = U 1 + U 1 + U 2 + U 3 . A
∆
∆
∆
realization based on Eqs. (3) and (5) after insertion of the input and output nodes
and the delays is shown below which has no delay-free loop.
δ
X(z)
U1
1/∆ W
1
_1
z
β
1/∆
U2
_
z 1
U3
W2
Y(z)
γ
8.3 Analysis yields Y ( z ) = G ( z )( X ( z ) − C ( z )Y ( z ) ). Hence,
Y ( z)
G( z)
2
H ( z) =
=
=
. The overall transfer function has
X ( z ) 1 + G ( z )C ( z ) (1 + 2 K ) + 3 z −1
a pole at z = −
3
3
. Thus, the system is stable if
< 1, or, K > 1 or
1 + 2K
1 + 2K
K < −2.
8.4 From the results of Problem 8.3, we have H ( z ) =
G( z)
which can be
1 + G ( z )C ( z )
G( z) − H ( z)
. Substituting the expressions for G (z ) and
G( z)H ( z)
H (z ) in this expression we get
solved yielding C ( z ) =
Not for sale
240
C ( z) = −
z −1 (7.0 + 9.1z −1 + 6.87 z −2 + 1.84 z −3 + 0.04 z −4 )
. Pole-zero plots of
0.04(1 + 1.8 z −1 + 1.46 z − 2 + 0.56 z − 3 + 0.08 z − 4 )
G ( z ), C ( z ), and H (z ) obtained using zplane are shown below:
H(z)
1
0.5
0.5
Imaginary Part
Imaginary Part
G(z)
1
0
-0.5
-1
0
-0.5
-1
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
C(z)
Imaginary Part
1
0.5
2
0
-0.5
-1
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
Ac can be seen from the above ploe-zero plots, G ( z ), C ( z ), and H (z ) are stable
transfer functions.
8.5
The structure with internal variables is shown below. Analysis of this structure yields
K
_
_
z1
X(z)
z1
W 1(z) β
Y(z)
α
_1
W 2(z)
_1
_
z1
_
z1
W1 ( z ) = K X ( z ) − z −2Y ( z ), W2 ( z ) = − Kz −1 X ( z ) + z −1Y ( z ), and
Y ( z ) = β W1 ( z ) + αW2 ( z ) + Kz −2 X ( z ). Substituting the first two equations into the
third, and rearranging we get (1 − αz −1 + βz −2 )Y ( z ) = K (β − αz −1 + z −2 ) X ( z ).
Not for sale
241
Hence, the transfer function is given by H ( z ) =
K (β − αz −1 + z −2 )
.
1 − αz −1 + β z − 2
(a) Since the structure employs 2 delays and has a second order transfer function, it
is a canonic structure.
(b) and (c) We form
⎛ β − α z −1 + z − 2
H ( z ) H ( z −1 ) = K 2 ⎜
⎜ 1 − α z −1 + β z − 2
⎝
⎞⎛ β z − 2 − αz −1 + 1 ⎞
⎟ = K 2 . Therefore,
⎟⎜
⎟⎜ z − 2 − αz −1 + β ⎟
⎠
⎠⎝
H (e jω ) = K for all values of ω. Hence, H (e jω ) = 1 if K = 1.
8.6
The structure with internal variables is shown below. Analysis of this structure yields
+
_
z 1
W 1(z)
_k
Y(z)
2
_
k2
_
z 1
+
W2 (z)
k1
+
γ1
γ2
X(z)
W1 ( z ) = γ 2 X ( z ) + k 2Y ( z ) + z −1W2 ( z ), W2 ( z ) = γ1 X ( z ) − k1Y ( z ), and
Y ( z ) = z −1W1 ( z ) − k 2 z −1W2 ( z ). Substituting the second equation in the first and
rearranging we get W1 ( z ) = ( γ 2 + γ1 z −1 ) X ( z ) + (k 2 − k1 z −1 )Y ( z ). Substituting this
equation and the second equation in the third equation we get after some
rearrangement [1 − (k1 + 1)k 2 z −1 + k1 z −2 ]Y ( z ) = [( γ 2 − k 2 γ1 ) z −1 + γ1 z −2 ] X ( z ).
( γ 2 − k 2 γ 1 ) z −1 + γ 1 z −2
Y ( z)
Hence, the transfer function is given by H ( z ) =
=
.
X ( z ) 1 − (k1 + 1) k 2 z −1 + k1 z − 2
For stability, we must have k1 < 1 and (1 + k1 )k 2 < 1 + k1 , or k 2 < 1.
8.7
The structure with internal variables is shown on next page. Analysis of this structure
yields
S 0 ( z ) = X ( z ) − S1 ( z ), S1 ( z ) = z −1 S 2 ( z ) + z −1 S 5 ( z ), S 2 ( z ) = a3 S 0 ( z ) − z −1 S 2 ( z ),
S 3 ( z ) = a3 S 5 ( z ) − z −1 S 3 ( z ), S 4 ( z ) = S 0 ( z ) + z −1 S 3 ( z ), S 5 ( z ) = a1 S 4 ( z ) − z −1 S 5 ( z ),
and Y ( z ) = a 4 S 4 ( z ). Eliminating S 0 ( z ), S1 ( z ), S 2 ( z ), S 3 ( z ), S 4 ( z ) and S 5 (z )
from these equations we get after some algebra
Not for sale
242
S 0(z)
X(z)
S 4(z)
a4
a3
Y(z)
a1
_
1
S2 (z) _ 1 z
_1 _
S 3(z)
z1
_1
S 5(z)
_1
_1
z
a2
S 1(z)
a 4 (1 + z −1 ) 3
Y ( z)
H ( z) =
=
.
X ( z ) 1 + (3 + a1 + a3 ) z −1 + (3 + 2 a1 + 2a3 − a1a2 ) z − 2
+ (1 + a1 + a3 − a1a2 − a1a2 a3 ) z − 3
8.8
The structure with internal variables is shown below. Analysis of this structure yields
_1
X(z)
W 1(z)
W 3(z)
_1
z
R1 (z)
α1
β1
α0
_
z1
β2
α2
β3
R 2(z)
α3
_
z1
W2 (z)
Y(z)
_1
Y ( z ) = α 0 X ( z ) + β1 z −1 R1 ( z ), W1 ( z ) = X ( z ) − β 2 z −1 R2 ( z ),
R1 ( z ) = W1 ( z ) + α1β1 z −1 R1 ( z ), W2 ( z ) = β1 z −1 R1 ( z ) − β 3 z −1W3 ( z ),
R2 ( z ) = W2 ( z ) + α 2 β 2 z −1 R2 ( z ), W3 ( z ) = β 2 z −1 R2 ( z ) + α 3β 3 z −1W3 ( z ).
From the third equation we get W1 ( z ) = (1 − α1β1 z −1 ) R1 ( z ). From the sixth equation
we get W3 ( z ) =
β 2 z −1 R2 ( z )
α 3β 3 z
−1
. From the fifth equation we get R2 ( z ) =
W2 ( z )
1 − α 2 β 2 z −1
.
Rewriting the fourth equation we get W2 ( z ) + β 3 z −1W3 ( z ) = β1 z −1 R1 ( z ), in which we
substitute the expressions for W3 (z ) and W1 (z ) resulting in after some algebra
R2 ( z ) =
β1 z −1 (1 − α 3β 3 z −1 )
β 2 β 3 z −1 + (1 − α 2 β 2 z −1 )(1 − α 3β 3 z −1 )
R1 ( z ). Substituting this expression
for R2 (z ) and the expression for W1 (z ) in the second equation we arrive at
Not for sale
243
R1 ( z ) =
β 2 β 3 z −2 + (1 − α 2 β 2 z −1 )(1 − α 3β 3 z −1 )
β 2 β 3 z − 2 (1 − α1β1 z −1 ) + (1 − α1β1 z −1 )(1 − α 2 β 2 z −1 )(1 − α 3β 3 z −1 )
X ( z ).
β1β 2 z − 2 (1 − α 3β 3 z −1 )
Substituting the above in the first equation we finally arrive at
H ( z) =
β1β 2 β 3 z −3 + β1 z −1 (1 − α 2 β 2 z −1 )(1 − α 3β 3 z −1 )
Y ( z)
= α0 +
.
X ( z)
(1 − α1β1 z −1 )(1 − α 2 β 2 z −1 )(1 − α 3β 3 z −1 ) + β 2 β 3 z − 2 (1 − α1β1 z −1 )
β1β 2 z − 2 (1 − α 3β 3 z −1 )
8.9 The structure with internal variables is shown below. Analysis of this structure yields
U(z) _ k1
W(z)
X(z)
k1
(3): Y ( z ) =
Y(z)
k2
1
z–
(1): W ( z) = X ( z) + k1Y ( z), (2): U ( z ) =
1
z–
1
1 − z −1
W ( z ) + k 2Y ( z ), and
− k1
U ( z ). Substituting Eq. (2) in Eq. (3) we get
1 − z −1
− k1
k k
− k1 ⎛ 1
⎞
(4): Y ( z ) =
⎜⎜
W ( z ) − 1 2 Y ( z ).
W ( z ) + k 2Y ( z ) ⎟⎟ =
1
1
−
−
−
1
2
1− z ⎝1− z
1 − z −1
⎠ (1 − z )
Substituting Eq. (1) in Eq. (4) we then get
k1
k k
Y (z) = −
[ X ( z ) + k1Y ( z )] − 1 2 Y ( z )
(1 − z −1 ) 2
1 − z −1
=−
k1
(1 − z −1 ) 2
X ( z) −
⎡ k1 + k 2 − k 2 z −1 ⎤
⎢
⎥Y ( z ), or,
1 − z −1 ⎣⎢
1 − z −1
⎦⎥
k1
⎡ k1 (k1 + k 2 − k 2 z −1 ) ⎤
k1
X ( z ). Hence,
⎢1 +
⎥Y ( z ) = −
−
1
2
(1 − z )
(1 − z −1 ) 2
⎢⎣
⎥⎦
k1
Y (z)
.
H (z) =
=−
X ( z)
[1 + k1 (k1 + k 2 )] − (2 + k1k 2 )z −1 + z − 2
8.10
(a) A direct form realization of H ( z ) = 1 − 3.6 z −1 + 5.4 z −2 − 4.32 z −3 + 1.944 z −4
− 0.4666z −5 + 0.0467z −6 and its transformed structure are shown on next page:
Not for sale
244
_
z 1
_
z 1
x[n]
_ 3.6
_
z 1
+
z
_
5.4
+
–1
z
_
0.0467
z
0.4666
–1
z
_
1.944
0.0467
–1
z
–1
z
–1
y[n]
_ 3.6
5.4
4.32
y[n]
+
+
+
+
–1
_ 0.4666
1.944
4.32
_
z 1
_
z 1
_
z 1
x[n]
(b) A cascade realization of
H ( z ) = (1 − 0.6 z −1 )(1 − 0.6 z −1 )(1 − 0.6 z −1 )(1 − 0.6 z −1 )(1 − 0.6 z −1 )(1 − 0.6 z −1 ) is
shown below:
x[n]
+
_1
+
+
_1
z
_1
z
_
_
0.6
z
_1
_
0.6
z
_
0.6
y[n]
_1
z
z
_
0.6
+
+
+
_1
_
0.6
0.6
(c) A cascade realization of
H ( z ) = (1 − 1.2 z −1 + 0.36 z −2 )(1 − 1.2 z −1 + 0.36 z −2 )(1 − 1.2 z −1 + 0.36 z −2 ) is shown
below:
x[n]
+
+
+
_1
z
z
z
_ 0.2
_ 0.2
+
_ 0.2
+
z
z
z
0.36
0.36
+
_1
_1
_1
y[n]
_1
_1
0.36
(d) A cascade realization of
H ( z ) = (1 − 1.8 z −1 + 1.08 z −2 − 0.216 z −3 )(1 − 1.8 z −1 + 1.08 z −2 − 0.216 z −3 ) is shown
below:
y[n]
x[n]
+
+
_
z 1
_
_
z 1
1.8
_
+
_1
+
_1
z
z
1.08
1.08
+
_
z 1
1.8
_ 0.216
Not for sale
+
_
z 1
_ 0.216
245
(e) A cascade realization of
H ( z ) = (1 − 0.6 z −1 )(1 − 0.6 z −1 )(1 − 1.2 z −1 + 0.36 z −2 )(1 − 1.2 z −1 + 0.36 z −2 ) is shown
below:
x[n]
+
_1
z
_ 0.6
+
+
+
z
z
z
_ 0.2
_ 0.6
y[n]
_1
_1
_1
_ 0.2
+
+
_1
_1
z
z
0.36
0.36
All realizations given above require 6 multipliers and 6 two-input adders.
8.11 (a) A four branch polyphase decomposition is given by
H ( z) = E 0 ( z 4 ) + E1 ( z 4 )z −1 + E 2 ( z 4 )z −2 + E 3 ( z 4 )z −3 , where
E 0 ( z ) = h[0] + h[ 4]z −1 + h[8] z −2 , E1 ( z ) = h[1] + h[5] z −1 + h[9] z −2 ,
E 2 ( z ) = h[ 2] + h[6]z −1, E 3 ( z) = h[3] + h[7]z −1.
(b) A canonic four-branch polyphase realization of the above transfer function is
shown below:
h[3]
h[7]
+
_
z 1
h[2]
h[6]
x[n]
_
z 4
_
z 4
+
+
_
z 1
h[9]
h[5]
+
h[1]
_
z 1
h[8]
h[4]
h[0]
+
+
+
y[n]
8.12 (a) A three branch polyphase decomposition is given by
H ( z) = E 0 ( z 3 ) + E1 ( z 3 )z −1 + E 2 ( z 3 )z −2 , where
E 0 ( z) = h[0] + h[3]z −1 + h[6]z −2 + h[9]z −3 , E1 ( z ) = h[1] + h[ 4]z −1 + h[7]z −2 ,
E 2 ( z ) = h[ 2] + h[ 5]z −1 + h[8]z −2 .
Not for sale
246
(b) A canonic three branch polyphase realization of the above transfer function is
shown below:
h[2]
h[5]
+
h[8]
_
z 1
_3
_3
_3
z
z
z
h[7]
h[4]
+
+
h[1]
_
z 1
h[9]
h[6]
+
h[3]
+
+
h[0]
8.13 (a) A two branch polyphase decomposition is given by H ( z) = E 0 ( z 2 ) + E1 ( z 2 )z −1 ,
where E 0 ( z) = h[0] + h[2]z −1 + h[ 4]z −2 + h[6]z −3 + h[8]z −4 ,
E1 ( z ) = h[1] + h[3]z −1 + h[ 5]z −2 + h[ 7]z −3 + h[9]z −4 .
(b) A canonic two branch polyphase realization of the above transfer function is shown
below:
+
+
+
+
_
z 2
_
z 2
_
z 2
h[5]
h[3]
h[9]
h[7]
+
h[1]
h[8]
+
_
z 2
h[6]
+
x[n]
h[4]
h[2]
_
z 1
+
h[0]
y[n]
+
8.14
_
z 1
x[n]
_
z 1
_
z 1
+
+
+
_1
_1
_
z 1
_1
_
z 1
_
z 1
h[1]
h[0]
+
h[2]
+
y[n]
8.15
Not for sale
247
_
z 1
_
z 1
_
z 1
+
+
_
z 1
_
z 1
h[1]
h[0]
_1
_1
_
z 1
_
z 1
+
+
_1
_1
h[3]
h[2]
+
+
+
8.16 G ( z ) = z − N / 2 − H ( z ). A canonic realization of both G ( z ) and H ( z ) is shown below
for N = 6.
_
_
_
+
G(z)
z 1
z 1
z 1
+
+
+
_
z 1
_
z 1
h[1]
h[0]
_
z 1
h[2]
h[3]
+
+
_1
+
H(z)
8.17 Without any loss of generality, assume M = 5 which means N = 11. In this case, the
transfer function is given by H ( z )
[
]
= z − 5 h[ 5] + h[ 4]( z + z −1 ) + h[3]( z 2 + z − 2 ) + h[ 2]( z 3 + z − 3 ) + h[1]( z 4 + z − 4 ) + h[ 0]( z 5 + z − 5 ) .
Now, the recursion relation for the Chebyshev polynomial is given by
Tr ( x ) = 2 x Tr −1 ( x ) − Tr − 2 ( x ), r ≥ 2 with T0 ( x ) = 1 and T1 ( x ) = x. Hence,
T2 ( x ) = 2 x T1 ( x ) − T0 ( x ) = 2 x 2 − 1,
T3 ( x) = 2 x T2 ( x ) − T1 ( x ) = 2 x(2 x 2 − 1) − x = 4 x 3 − 3 x,
T4 ( x ) = 2 x T3 ( x ) − T2 ( x ) = 2 x(4 x 3 − 3 x) − (2 x 2 − 1) = 8 x 4 − 8 x 2 + 1,
T5 ( x ) = 2 x T4 ( x ) − T3 ( x ) = 2 x(8 x 4 − 8 x 2 + 1) − (4 x 3 − 3 x) = 16 x 5 − 20 x 3 + 5 x.
We can thus rewrite the expression inside the square brackets given above as
⎛ z + z −1 ⎞
⎛ z + z −1 ⎞
⎛ z + z −1 ⎞
⎛ z + z −1 ⎞
⎛ z + z −1 ⎞
h[ 5] + 2h[ 4]T1 ⎜
⎟
⎟ + 2h[ 0]T5 ⎜
⎟ + 2h[1]T4 ⎜
⎟ + 2h[2]T3 ⎜
⎟ + 2h[3]T2 ⎜
⎝ 2 ⎠
⎝ 2 ⎠
⎝ 2 ⎠
⎝ 2 ⎠
⎝ 2 ⎠
⎡ ⎛ z + z −1 ⎞ 3
⎡ ⎛ z + z −1 ⎞ 2 ⎤
⎛ z + z −1 ⎞ ⎤
⎛ z + z −1 ⎞
= h[5] + 2h[ 4]⎜
⎟⎥
⎟ − 3⎜
⎟ − 1⎥ + 2h[2]⎢ 4⎜
⎟ + 2h[3]⎢2⎜
⎝ 2 ⎠ ⎥⎦
⎝ 2 ⎠
⎢⎣ ⎝ 2 ⎠
⎥⎦
⎢⎣ ⎝ 2 ⎠
2
3
⎤
⎡ ⎛ z + z −1 ⎞ 4
⎡ ⎛ z + z −1 ⎞ 5
⎛ z + z −1 ⎞
⎛ z + z −1 ⎞
⎛ z + z −1 ⎞ ⎤
⎥
⎢
+ 2h[1]⎢8⎜
−
+
+
−
8
1
2
h
[
0
]
16
20
⎟
⎜
⎟
⎜
⎟
⎜
⎟ + 5⎜
⎟⎥
⎝ 2 ⎠
⎝ 2 ⎠
⎝ 2 ⎠ ⎥⎦
⎥⎦
⎢⎣ ⎝ 2 ⎠
⎢⎣ ⎝ 2 ⎠
5
n
⎛ z + z −1 ⎞
=
a[ n]⎜
⎟ , where a[ 0] = h[ 5] − 2h[3] + 2h[1], a[1] = 2h[ 4] − 6h[ 2] + 10 h[ 0],
2 ⎠
⎝
n=0
∑
a[ 2] = 4h[3] − 16 h[1], a[3] = 8h[ 2] − 40 h[1], a[ 4] = 16 h[1], and a[5] = 32h[0]. A
realization of
Not for sale
248
H ( z) =
z−5
2
n
5
⎛ 1+ z −2 ⎞ − 3
⎛ z + z −1 ⎞
⎛ 1+ z − 2 ⎞ − 4
a[ n]⎜
⎟ z
⎟ = a[0]z − 5 + a[1]⎜
⎟ z + a[2]⎜
⎝ 2 ⎠
⎝ 2 ⎠
⎝ 2 ⎠
n=0
∑
5
4
3
⎛ 1+ z − 2 ⎞
⎛ 1 + z − 2 ⎞ −1
⎛ 1+ z − 2 ⎞ − 2
+ a[3]⎜
⎟ is shown below:
⎟ z + a[5]⎜
⎟ z + a[ 4]⎜
⎝ 2 ⎠
⎝ 2 ⎠
⎝ 2 ⎠
_
_
1+z 2
______
2
x[n]
_
z 1
+
a[2]
_
z 1
1+z 2
______
2
+
a[5]
a[4]
a[3]
_
z 1
+
_
1+z 2
______
2
1+z 2
______
2
a[1]
a[0]
_
_
1+z 2
______
2
_
z 1
_
z 1
+
+
y[n]
P( z ) P1( z) P 2 ( z) P 3 ( z)
. Assume all zeros of P ( z ) and D ( z )
=
⋅
⋅
D( z ) D1 ( z) D2 ( z) D3 ( z)
are complex. Note that the numerator of the first stage can be one of the 3 factors,
P1 ( z), P2 ( z), and P3 ( z ). Likewise, the numerator of the second stage can be one of the
remaining 2 factors, and the numerator of the third stage is the remaining factor.
Similarly, that the denominator of the first stage can be one of the 3 factors,
D1 ( z), D2 ( z), and D3 ( z ). Likewise, the denominator of the second stage can be one
of the remaining 2 factors, and the denominator of the third stage is the remaining
factor. Hence, there are (3! ) 2 = 36 different types of cascade realizations.
8.18 Consider H ( z) =
If the zeros of P ( z ) and D ( z ) are all real, then P ( z ) has 6 real zeros and D ( z ) has 6
real zeros. In this case, then there are (6! ) 2 = 518400 different types of cascade
realizations.
8.19 H ( z ) =
K
∏ Dii (z).
i =1
P (z)
⎛K⎞
Here, the numerator of the first stage can be chosen in ⎜ ⎟ ways,
⎝1⎠
⎛ K −1 ⎞
the numerator of the second stage can be chosen in ⎜
⎟ ways, and so on, until there
⎝ 1 ⎠
is only one possible choice for the numerator of the K –th stage. Likewise, the
K
denominator of the first stage can be chosen in ⎛⎜ ⎞⎟ ways, the denominator of the
⎝1⎠
⎛ K − 1⎞
second stage can be chosen in ⎜
⎟ ways, and so on, until there is only one possible
⎝ 1 ⎠
choice for the denominator of the K –th stage. Hence, the total number of possible
2
2
2
2
2
K
K −1⎞ ⎛ K − 2 ⎞
⎛ 2 ⎞ ⎛ 1⎞
cascade realizations are equal to ⎛⎜ ⎞⎟ ⎛⎜
⎟ ⎜
⎟ L ⎜ ⎟ ⎜ ⎟ = ( K! ) 2 .
1
1
1
⎝ 1 ⎠ ⎝ 1⎠
⎝ ⎠ ⎝
⎠ ⎝
⎠
Not for sale
249
8.20 A canonic direct form II realization of H ( z ) =
3 − 5 z −2 + 3 z −3
1 − 4 z −1 + 3 z − 2 + 6 z − 4
on the left. Its transposed realization is shown below on the right.
x[n]
2
+
+
y[n]
2
x[n]
4
+
_
z 1
_5
3
_5
+
_3
+
_
z 1
_
z 1
3
3
_
4
+
_
z 1
_
y[n]
+
_
z 1
_
z 1
+
is shown below
+
_
z 1
_
z 1
_6
6
8.21 (a) A cascade canonic realization of H1( z) based on the decomposition
⎛
z −1 + 3 z − 2
H 1 ( z ) = 0.3⎜
⎜ 1 − 1.6 z −1 + 2.1z − 2
⎝
x[n]
⎞⎛ 1 − 0.8 z −1 ⎞
⎟ is shown below:
⎟⎜
⎟⎜ 1 − 0.75 z −1 ⎟
⎠
⎠⎝
0.3
z
–1
–1
z
_
0.75
y[n]
0.8
1.6
–1
z
_ 2.1
3
An alternate cascade canonic realization of H1( z) based on the decomposition
⎛ z −1 − 0.8 z − 2
H 1 ( z ) = 0.3⎜
⎜ 1 − 1.6 z −1 + 2.1z − 2
⎝
x[n]
⎞⎛ 1 + 3 z −1 ⎞
⎟ is shown below:
⎟⎜
⎟⎜ 1 − 0.75 z −1 ⎟
⎠
⎠⎝
0.3
z–1
–1
z
y[n]
0.75
3
1.6
_ 2.1
Not for sale
–1
z
_
0.8
250
(b) A cascade canonic realization of H 2 ( z) based on the decomposition
⎞
⎛ 3.1 + 0.85z −1 ⎞⎛ 1 − 4.5z −1 ⎞⎛
3 − 0 .5 z − 2
⎟ is shown below:
⎟⎜
⎟⎜
H 2 ( z ) = ⎜⎜
−1 ⎟⎜ 1 + 0.2 z −1 ⎟⎜ 1 + 0.5z −1 + 0.1z − 2 ⎟
1
0
.
15
z
−
⎠
⎠⎝
⎠⎝
⎝
3.1
3
x[n]
z–1
z–1
_
_ 0.2
0.85
0.15
–1
z
y[n]
_ 0.5
4.5
z
–1
_ 0.5
_ 0.1
An alternate cascade canonic realization of H 2 ( z) based on the decomposition
⎛ 1 − 4.5z −1 ⎞⎛ 3.1 + 0.85z −1 ⎞⎛
⎞
3 − 0 .5 z − 2
⎟⎜
⎟⎜
⎟ is shown below:
H 2 ( z ) = ⎜⎜
⎟
⎜
⎟
⎜
⎟
−
1
−
1
−
1
−
2
⎝ 1 − 0.15z ⎠⎝ 1 + 0.2 z
⎠⎝ 1 + 0.5z + 0.1z ⎠
3.1
3
x[n]
–1
z–1
z
_
0.15
4.5
–1
z
y[n]
_ 0.2
_ 0.5
0.85
_
–1
z
_ 0.5
0.1
(c) The factored form of the denominator of H 3 ( z ) is given by:
(1 + 3.1z −1 )(1 − 2.0246 z −1 )(1 − 0.3754 z −1 ). A cascade canonic realization of
H 3 ( z ) based on the decomposition
⎛ 1 .5 + 0 .7 z −1 ⎞ ⎛
⎞
5.2 − 8.4 z −1 + 7 z − 2
⎟⎜
⎟
H 3 ( z ) = ⎜⎜
−1 ⎟⎜ (1 − 2.0246 z −1 )(1 − 0.3754 z −1 ) ⎟
+
1
3
.
1
z
⎝
⎠⎝
⎠
−
1
−
1
−
2
⎞
⎛ 1.5 + 0.7 z ⎞⎛ 5.2 − 8.4 z + 7 z
⎟ is shown below:
⎟⎜
=⎜
⎜ 1 + 3.1z −1 ⎟⎜ 1 − 2.4 z −1 + 0.76 z − 2 ⎟
⎠
⎠⎝
⎝
1.5
5.2
x[n]
z
_ 3.1
–1
2.4
0.7
z
–1
z
_ 0.76
_ 8.4
y[n]
–1
7.0
An alternate cascade canonic realization of H 3 ( z ) based on the decomposition
⎛ 1 .5 + 0 . 7 z − 1 ⎞ ⎛
⎞
5 .2 − 8 .4 z − 1 + 7 z − 2
⎟⎜
⎟
H 3 ( z ) = ⎜⎜
−1 ⎟⎜ (1 + 3.1z −1 )(1 − 0.3754 z −1 ) ⎟
1
2
.
0246
z
−
⎝
⎠⎝
⎠
Not for sale
251
⎛ 1.5 + 0.7 z −1 ⎞⎛
⎞
5 .2 − 8 .4 z − 1 + 7 z − 2
⎟⎜
⎟ is shown below:
= ⎜⎜
− 1 ⎟⎜ 1 + 2.7246 z −1 − 1.1637 z − 1 ⎟
−
1
2
.
0246
z
⎝
⎠⎝
⎠
1.5
5.2
x[n]
z
–1
_ 2.7246
2.024
0.7
z–1
z
_ 8.4
y[n]
–1
7.0
1.1637
8.22 (a) A partial fraction expansion of H1( z) in z −1 obtained using the M-file residuez
is given by H1 ( z ) = 0.4571 +
− 0.0513
+
− 0.4059 + 0.9878z −1
. The Parallel Form I
1 − 0.75z −1
1 − 1.6 z −1 + 2.1z − 2
realization based on this expansion is shown on the next page on the left side.
0.4571
x[n]
_ 0.0513
+
+
y[n]
x[n]
+
_
z 1
_
z 1
0.75
_
0.0385
+
y[n]
0.4059
+
+
+
_
z 1
+
_
0.75
_
z 1
1.6
+
0.9878
0.3385
1.6
_
z 1
+
_
z 1
_ 2.1
_ 2.1
_ 0.8523
A partial fraction expansion of H1( z) in z obtained using the M-file residue is
given by H1 ( z ) =
− 0.0385z −1
+
0.3385z −1 − 0.8523z −2
. The Parallel Form II
1 − 0.75z −1
1 − 1.6 z −1 + 2.1z − 2
realization based on this expansion is shown above on the right side.
(b) A partial fraction expansion of H 2 ( z) in z −1 obtained using the M-file residuez
146.71
238.6
261.4905 + 79.8813z −1
+
+
. The
is given by H 2 ( z ) = −637.5 +
1 + 0.2 z −1 1 − 0.15z −1
1 + 0.5z −1 + 0.1z − 2
Parallel Form I realization based on this expansion is shown on the next page on the left
side.
Not for sale
252
146.71
+
+
_
z 1
_
z 1
_ 0.2
x[n]
0.15
238.6
+
+
y[n]
x[n]
+
_1
_
z 1
z
0.15
_
637.5
+
+
_
+
0.5
+
y[n]
9.3
_
z 1
261.4905
_ 50.8639
_ 0.5
79.8813
+
+
_
z 1
_1
z
_
_ 29.3414
_ 0.2
+
_
z 1
35.7904
0.1
_ 26.1491
_ 0.1
A partial fraction expansion of H 2 ( z) in z obtained using residue is given by
− 29.3414 z −1 35.7904 z −1 − 50.8639z −1 − 26.1491z −2
+
+
. The
H 2 ( z ) = 9.3 +
1 + 0.2 z −1
1 − 0.15z −1
1 + 0.5z −1 + 0.1z − 2
Parallel Form II realization based on this expansion is shown above on the right side.
(c) A partial fraction expansion of H 3 ( z ) in z −1 obtained using residuez is given
5.939
2.4696
− 2.6884
+
+
. The Parallel Form I
by H 3 ( z ) = 2.0798 +
1 + 3.1z −1 1 − 0.0246 z −1 1 − 0.3754 z −1
realization based on this expansion is shown below on the left side.
2.0798
7.8
5.939
+
+
_
z 1
_ 3.1
_ 3.1
x[n]
_
z 1
2.4696
+
+
y[n]
x[n]
_ 18.4109
+
_1
z
+
_
z 1
0.0246
0.0246
y[n]
5.0
_ 2.6884
+
+
_1
_
z 1
z
0.3754
_
1.0092
0.3754
Not for sale
253
A partial fraction expansion of H 3 ( z ) in z obtained using residue is given by
− 18.4109z −1
5.0 z −1
− 1.0092 z −1
+
+
H 3 ( z ) = 7.8 +
. The Parallel Form II
1 + 3.1z −1
1 − 0.0246 z −1 1 − 0.3754 z −1
realization based on this expansion is shown on the previous page on the right side.
8.23 A cascade realization of based on the factored form given by
⎛
⎞⎛ 0.44 + 0.362 z −1 + 0.02 z − 2 ⎞
z −1
⎟⎜
⎟ is shown below:
H ( z ) = ⎜⎜
⎟
− 1 + 0 .5 z − 2 ⎟ ⎜
−1
+
−
1
0
.
8
z
1
0
.
4
z
⎝
⎠⎝
⎠
x[n]
+
0.44
+
_
+
_
z 1
8.24 (a) H ( z ) =
y[n]
_
z 1
0.8
0.362
0.4
_
z 1
_
+
+
_
z 1
0.5
0.02
2 − 0.3z −1 0.4 + z −1
3
2.4 + 5.64 z −1 − 0.9z −2
⋅
⋅
=
.
1 + 0.5z −1 1 + 0.4 z −1 1 + 0.5z −1 1 + 1.4 z −1 + 0.65z − 2 + 0.1z − 3
(b) y[ n] = 2.4 x[ n] + 5.64 x[ n − 1] − 0.9 x[ n − 2] − 1.4 y[ n − 1] − 0.65 y[ n − 2] − 0.1y[ n − 3].
(c) A cascade realization of H (z ) is shown below:
x[n]
2
+
+
0.4
+
_
z 1
_ 0.5
+
3
+
_
z 1
_
z 1
_
_
0.3
0.4
y[n]
_ 0.5
(d) A partial-fraction expansion of H ( z ) in z −1 obtained using residuez is given by
− 62.4
− 277.2
342
+
+
H ( z) =
. The Parallel Form I realization
−
1
−
1
2
1 + 0.5z
(1 + 0.5z )
1 + 0.4 z −1
based on this expansion is shown on the next page.
(e) The inverse z –transform of the partial-fraction of H ( z ) given in Part (d) yields
h[ n] = 342(−0.5) n µ[ n] − 62.4( n + 1)( −0.5) n µ[ n] − 277.2( −0.4) n µ[ n].
Not for sale
254
_
+
277.2
_
z 1
_ 0.4
342
+
x[n]
+
y[n]
, X ( z) =
1
_
z 1
_ 0.5
_
+
62.4
_
z 1
+
_1
_ 0.25
8.25 (a) Y ( z ) =
1
1 − 0.4 z −1
−
0.3z −1
1 − 0.4 z −1
=
_
z 1
1 − 0.3z −1
1 − 0.4 z −1
1 − 0.2 z −1
Y ( z ) (1 − 0.3z −1 )(1 − 0.2 z −1 ) 1 − 0.5z −1 + 0.06 z −2
=
=
H (z) =
.
X (z)
1 − 0.4 z −1
1 − 0.4 z −1
. Thus,
(b) y[ n] = x[ n] − 0.5 x[ n − 1] + 0.06 x[ n − 2] + 0.4 y[ n − 1].
x[n]
+
_ 0.5
_
z 1
+
+
(c)
y[n]
0.06
_
z 1
0.4
A partial-fraction expansion of H ( z ) in z −1 using residuez is given by
0.125
whose realization yields the Parallel Form I
H ( z ) = 0.875z −1 − 0.15 +
1 − 0.4 z −1
structure as indicated on the next page.
(d)
(e) The inverse z -transform of H ( z ) yields
h[ n] = 0.875δ[ n − 1] − 0.15δ[ n] + 0.125(0.4) n µ[ n].
Not for sale
255
_1
+
x[n]
z
0.4
_
z 1
(f) X ( z ) =
1
−
0.4 z −1
=
_
0.15
+
0.125
y[n]
0.875
1 − 0.4 z −1
. Therefore, Y ( z ) = H ( z ) X ( z )
1 − 0.3z −1 1 − 0.3z −1
⎛ (1 − 0.3z −1 )(1 − 0.2 z −1 ) ⎞⎛ 1 − 0.4 z −1 ⎞
⎟⎜
⎟ = 1 − 0.2 z −1 , whose inverse z -transform
= ⎜⎜
⎟
⎜
⎟
−
1
−
1
1 − 0 .4 z
⎝
⎠ ⎝ 1 − 0 .3 z ⎠
yields y[ n] = δ[ n] − 0.2δ[ n − 1].
1 − 0.3z −1
8.26 Figure P8.12 can be seen to be a Parallel Form II structure. A partial-fraction
2 z 2 − 3.2 z − 18.6
in z obtained using the M-file residue is
expansion of H ( z ) =
z 2 − 2.6 z − 1.2
5 z −1
− 3z −1
. Comparing the coefficients of the
given by H ( z ) = 2 +
+
1 − 3z −1 1 + 0.4 z −1
expansion with the corresponding multiplier coefficients in Figure P8.12 we conclude
that the multiplier coefficient − 5 in the feed forward path should be 5 and the
multiplier coefficient − 0.5 in the feedback path should be replaced with − 0.4.
8.27 Figure P8.13 can be seen to be a Parallel Form I structure. A partial-fraction expansion
4 z 2 − 5.6 z
in z −1 obtained using the M-file residuez is given by
of H ( z ) =
2
z + 0.2 z − 0.08
⎛ − 1.5
⎞
12
−8
1
⎟⎟. Comparing the
+
= −8⎜⎜
H (z) =
+
1 + 0.4 z −1 1 − 0.2 z −1
⎝ 1 + 0.4 z −1 1 − 0.2 z −1 ⎠
coefficients of the expansion with the corresponding multiplier coefficients in Figure
P8.12 we conclude that the multiplier coefficient A has a value equal to − 8 and the
multiplier coefficient B has a value equal to − 0.4.
8.28 (a) The difference equation corresponding to the transfer function H ( z ) =
=
Y ( z)
X ( z)
(1 + α1 + α 2 )(1 + 2 z −1 + z −2 )
is given by
1 − α1z −1 + α2 z − 2
y[ n] + α1 y[ n − 1] − α2 y[ n − 2] = (1 + α1 + α2 )( x[ n] + 2 x[ n − 1] + x[ n − 2]), which can be
rewritten as y[ n] = ( x[ n] + 2 x[ n − 1] + x[ n − 2]) + α1 ( y[ n − 1] − x[ n] − 2 x[ n − 1] − x[ n − 2])
− α2 ( y[ n − 2] − x[ n] − 2 x[ n − 1] − x[ n − 2]). Denoting w[ n] = x[ n] + 2 x[ n − 1] + x[ n − 2],
the difference equation representation becomes
Not for sale
256
y[ n] = w[ n] + α1 ( y[ n − 1] − w[ n]) − α2 ( y[ n − 2] − w[ n]). A realization of H (z ) based on the
last two equations is as indicated below:
w[n]
_
z 1
α1
_
1
2
+
+
_1
z
y[n]
+
+
+
x[n]
_1
z
_α
_
_
z 1
2
1
+
An interchange of the two stages leads to an equivalent realization shown below:
x[n]
+
+
+
α1
_
1
+
_1
z
_α
_1
_1
z
_1
2
2
y[n]
+
_1
z
z
+
Finally, by delay sharing the above structure reduces to the canonic realization shown
below:
x[n]
y[n]
+
+
+
α1
_
1
+
_
_α
_
z 1
2
+
_1
2
z
1
+
(b) The difference equation corresponding to the transfer function H ( z ) =
=
Y ( z)
X ( z)
(1 − α2 )(1 − z −2 )
is given by
1 − α1z −1 + α2 z − 2
y[ n] − α1 y[ n − 1] + α2 y[ n − 2] = (1 − α2 )( x[ n] − x[ n − 2]) which can be rewritten as
y[ n] = α1 y[ n − 1] − α2 y[ n − 2] + x[ n] − α2 x[ n] − x[ n − 2] + α2 x[ n − 2]
= α1 y[ n − 1] − α2 ( x[ n] − x[ n − 2] + y[ n − 2]) + ( x[ n] − x[ n − 2]). Denoting
w[ n] = x[ n] − x[ n − 2], we can rewrite the last equation as
y[ n] = α1 y[ n − 1] − α2 (w[ n] + y[ n − 2]) + w[ n].
A realization of H (z ) based on the last two equations is as shown on next page.
Not for sale
257
+
x[n]
_
z 1
w[n]
_α
_1
+
+
2
y[n]
α1 _ 1
z
+
_
z 1
_
z 1
_
1
An interchange of the two stages leads to an equivalent realization shown below:
x[n]
_α
+
+
2
+
α1 _ 1
z
z
_1
+
_
z 1
_
1
y[n]
_1
_
z 1
Finally, by delay sharing the above structure reduces to a canonic realization as shown
below:
x[n]
_α
+
+
2
+
α1 _ 1
z
y[n]
_1
+
_
z 1
_1
8.29 (a)
+
+
X1
α1
α2
+
α3
_
z 1
Y1
α4
_
z 1
(b)
+
+
X1
α4
Y1
α2
_
z 1
α1
+
α3
_
z 1
Not for sale
258
C + D ⋅ H N −1 ( z )
Y
,
8.30 (a) From the structure of Figure P8.14 it follows that H N ( z ) = 1 =
X1 A + B ⋅ H N − 1 ( z )
C − A ⋅ H N ( z)
. Substituting the expression for H N ( z ) we
from which we get H N −1 ( z ) =
B ⋅ H N (z) − D
N
N
C ⎛⎜ 1 +
di z − i ⎞⎟ − A⎛⎜
pi ⎞⎟
=
1
=
0
i
i
⎠
⎝
⎠
then arrive at H N −1 ( z ) = ⎝
N
N
B⎛⎜
pi ⎞⎟ − D⎛⎜ 1 +
d z − i ⎞⎟
i =1 i
⎝
⎠
⎝ i=0 ⎠
∑
∑
∑
=
∑
(C − Ap 0 ) + (Cd1 − Ap1 )z −1 + K + (Cd N −1 − Ap N −1 )z − N + 1 + (Cd N − Ap N )z − N
( Bp 0 − D ) + ( Bp1 − Dd1 )z −1 + L + ( Bp N −1 − Dd N −1 )z − N + 1 + ( Bp N − Dd N )z − N
.
Substituting the values A = 1, B = d N z −1 , C = p0 , and D = p N z −1 , we get H N −1 ( z )
=
( p 0 − p 0 ) + ( p 0 d 1 − p1 ) z − 1 + L + ( p 0 d N − 1 − p N − 1 ) z − N + 1 + ( p 0 d N − p N ) z − N
(d N p0 − p N )z −1 + (d N p1 − p N d1 )z − 2 + L + (d N p N −1 − p N d N −1 )z − N
+ (d N p N − p N d N )z − N −1
=
( p 0 d 1 − p1 ) + L + ( p 0 d N − 1 − p N − 1 ) z − N + 2 + ( p 0 d N − p N ) z − N + 1
(d N p0 − p N ) + (d N p1 − p N d1 )z −1 + L + (d N p N −1 − p N d N −1 )z − N + 1
p ' + p1' z −1 + L + p 'N − 2 z − N + 2 + p 'N −1 z − N + 1
where
= 0
' −2z− N +2 + dN
' −1 z − N + 1
1 + d1' z −1 + L + d N
p k' =
p k d k +1 − pk +1
p d − pN dk
, 0 ≤ k ≤ N − 1, and d k' = k N
, 1 ≤ k ≤ N − 1.
p0 d N − p N
p0 d N − p N
(b) From the chain parameters, we obtain for the first stage t 11=
C
= p0 ,
A
AD − BC
1
B
= ( p N − p0 d N )z −1 , t 21= = 1, t 22 = − = − d N z −1 . The
A
A
A
corresponding input-output relations of the two-pair are given by
Y1 = p 0 X1 + ( p N − p 0 d N )z −1 X 2 = p 0 ( X1 − d N z −1 X 2 ) + p N z −1 X 2 ,
t12 =
Y2 = X1 − d N z −1 X 2 . Substituting the second equation into the first we rewrite it as
Y1 = p0Y2 + p N z −1 X 2 . A realization of the two-pair based on the last two equations is
therefore as indicated below:
X1
Y2
_d
N
p
0
Y1
p
z–1
X2
N
Not for sale
259
(c) Except for the first stage, all other stages require 2 multipliers. Hence, the total number
of multipliers needed to implement an N –th order transfer function H N (z) is 2 N + 1.
The total number of 2-input adders required is 2N , while the overall realization is canonic
requiring N delays.
8.31 (a) From G3 ( z) = H1 ( z) =
0.3z −1 + 0.66 z −2 − 0.72 z −3
, using Eq. (8.132a) and
1 − 2.35z −1 + 3.3z − 2 − 1.575z − 3
− 0.4167 − 0.9167z −1 + z −2
. Repeating the procedure we get
(8.132b) we get G2 ( z ) =
1 − 3.0063z −1 + 1.8562 z − 2
− 1.2232 + z −1
. From G 3 ( z), G 2 ( z ), and G1( z), we arrive at the cascaded lattice
G1( z) =
1 − 0.7357z −1
realization shown below:
_1.8562
1.575
_
_
_1.2232
0.4167
z–1
0.72
(b) From G 4 ( z ) = H 2 ( z ) =
0.7357
z
–1
z
–1
9.3 − 39.3z −1 − 13.025z −2 + 6.55z −3 + 1.9125z −4
, using Eq.
1 + 0.55z −1 + 0.095z − 2 − 0.01z − 3 − 0.003z − 4
− 22.8896 − 7.1679z −1 + 3.4235z −2 + z −3
.
(8.132a) and (8.132b) we get G3 ( z) =
1 + 0.4813z −1 + 0.0735z − 2 + 0.00027z − 3
3.8259 + 5.0744 z −1 + z −2
and
Repeating the procedure twice we get G2 ( z) =
1 + 0.4803z −1 + 0.0721z − 2
4.4704 + z −1
. From G 4 ( z ), G 3 ( z), G 2 ( z), and G1( z), we arrive at the cascaded
G1( z) =
1 + 0.1579z −1
lattice realization shown below:
0.003
9.3
1.9125
_
_ 0.0721
0.00027
_
22.8896
–1
z
(c) From G3 ( z ) = H 3 ( z ) =
4.7915
0.9179
3.8259
z–1
z–1
z–1
7.8 − 8.96 z −1 + 4.62 z −2 + 4.92 z −3
, using Eq. (8.132a) and
1 + 0.7 z −1 − 6.68z − 2 + 2.356 z − 3
1.07 − 4.209z −1 + z −2
. Repeating the procedure we get
(8.132b) we get G2 ( z) =
1 − 1.8209z −1 + 3.2364 z − 2
Not for sale
260
G1( z) =
0.9179 + z −1
. From G 3 ( z), G 2 ( z ), and G1( z), we arrive at the cascaded lattice
1 − 4.7915z −1
realization shown below:
_ 2.356
_3.2364
4.7915
7.8
1.07
0.9179
z
4.92
z–1
–1
z
–1
8.32 When H N (z) is an allpass transfer function of the form
H N ( z ) = AN ( z ) =
d N + d N −1 z −1 + L + d 1z − N + 1 + z − N
, then from Eq. (8.132a), the
1 + d 1z −1 + L + d N −1 z − N + 1 + d N z − N
numerator coefficients of H N −1 ( z ) are given by
− p k + 1 d N d k + 1 − d N − k −1
p d
=
, and from Eq. (8.132b) the denominator
p k' = 0 k + 1
2 −1
p0 d N − p N
dN
coefficients of H N −1 ( z) are given by
p N − k −1d N − d N − k − 1 d k + 1d N − d N − k − 1
'
dN
=
= pk' , implying H N −1 ( z) is an
− k −1 =
2 −1
p0 d N − pN
dN
allpass transfer function of order N − 1. Since here p N = 1 and p0 = d N , the lattice
structure of Problem 8.30 then reduces to the lattice structure employed in the Gray-Markel
realization procedure.
8.33 (a) Consider the realization of Type 1B allpass structure. From its transfer parameters
given in Eq. (8.50b) we arrive at Y1 = z −1 X1 + (1 + z −1 ) X 2 = z −1 ( X1 + X 2 ) + X 2 , and
Y2 = (1 − z −1 ) X1 − z −1 X 2 = X1 − z −1 ( X1 + X 2 ). A realization of the two-pair based on
these two equations is as shown below which leads to the structure of Figure 8.24(b).
X1
+
_1
_
z 1
X2
+
Y2
+
Y1
(b) From the transfer parameters of Type 1At allpass given in Eq. (8.50c) we obtain
Y1 = z −1 X1 + X 2 , and Y2 = (1 − z −2 ) X1 − z −1 X 2 = X1 − z −1 ( z −1 X1 + X 2 ) = X1 − z −1Y1 .
A realization of the two-pair based on these two equations is as shown on next page which
leads to the structure of Figure 8.24(c).
Not for sale
261
_
z 1
X1
+
Y1
_1
X2
z
Y2
_1
+
(c) From the transfer parameters of Type 1At allpass given in Eq. (8.50d) we obtain
Y1 = z −1 X 1+ (1 − z −1 ) X 2 = z −1 ( X1 − X 2 ) + X 2 , and Y2 = (1 + z −1 ) X1 − z −1 X 2
= X1 + z −1 ( X1 − X 2 ). A realization of the two-pair based on these two equations is as
shown below which leads to the structure of Figure 8.24(d).
_
z 1
+
X1
+
_1
Y2
X2
+
Y1
8.34 (a) A cascade connection of 4 Type 1A first-order allpass networks is shown below:
_
z 1
+
_
z 1
+
+
+
_1
_1
a
_
z 1
_
z 1
+
+
_1
_
z 1
b
_
z 1
+
+
_1
_
z 1
c
_
z 1
d
Simple block diagram manipulation of the above structure leads to:
_
z 1
+
_1
+
_
z 1
+
_
z 1
+
z
c
b
_1
+
+
_1
z
z
a
_
z 1
+
_1
_1
_
z 1
+
d
_1
_1
Finally, by delay sharing between adjacent allpass sections we arrive at the following
equivalent realization requiring now 5 delays compared to 8 delays in the direct realization
shown on the previous page.
+
+
_
z 1
+
+
_
z 1
+
+
_
z 1
_1
_
z 1
a
_1
+
d
c
b
_
z 1
+
_1
_1
(b) A cascade connection of 4 Type 1At first-order allpass networks is shown below which
requires 8 delays.
_
_
_
_
z 1 +
z 1 +
z 1 +
z 1 +
a
+
_
z 1
_1
b
+
_
z 1
_1
Not for sale
c
+
_
z 1
_1
d
+
_
z 1
_1
262
By delay sharing between adjacent allpass sections we arrive at the following equivalent
realization requiring now 5 delays.
_
_
_
_
+
+
z 1
z 1
z 1
+
z 1 +
a
_1
_
z 1
_1
_1
_1
+
+
+
+
d
c
b
8.35 The structure of Figure P8.15 with internal variables labeled is shown below:
–1
–1
X(z)
W(z)
z
a
U(z)
Y(z)
–1
Its analysis yields (1): W ( z ) = X ( z ) − z −1U ( z ), (2): U ( z ) = a W ( z ) + z −1U ( z ), and (3):
a
W ( z). Substituting Eq.
Y ( z ) = −W ( z ) + U ( z ). From Eq. (2) we obtain (4): U ( z ) =
1 − z −1
⎛ 1 − a − z −1 ⎞
⎟W ( z ). Substituting Eq. (4) in Eq. (1) we get
(4) in Eq. (3) we get (5): Y ( z ) = −⎜⎜
−1 ⎟
−
1
z
⎝
⎠
⎛ 1 − a − z −1 + a z −1 ⎞
⎟W ( z ). Finally, from Eqs. (5) and (6) we arrive at
(6) : X ( z ) = ⎜
⎜
⎟
−1
1
z
−
⎝
⎠
−
1
Y ( z) − (1 − a ) + z
.
H (z) =
=
X ( z) 1 − (1 − a)z −1
8.36 We realize A2 ( z ) =
d1d 2 + d1 z −1 + z −2
in the form of a constrained three-pair as
1 + + d1 z −1 + d1d 2 z − 2
indicated below:
X1
Y1
t11 t12 t13
Y2
t21 t22 t23
t31 t32 t33
_d
X 3 d2
X2
Y3
⎡ Y1 ⎤ ⎡ t 11 t 12
From the above figure, we have ⎢⎢Y2 ⎥⎥ = ⎢⎢t 21 t 22
⎢⎣Y3 ⎥⎦ ⎢⎣t 31 t 32
Not for sale
1
t 13 ⎤ ⎡ X1 ⎤
t 23 ⎥⎥ ⎢⎢ X 2 ⎥⎥, and X 2 = − d1Y 2,
t 33 ⎥⎦ ⎢⎣ X 3 ⎥⎦
263
Y
N ( z)
, where
X 3 = d 2Y 3. From these equations, we get after some algebra A2 ( z ) = 1 =
X1 D ( z )
D( z) = 1 + d1t 22 − d 2 t 33 + d1d 2 (t 23 t 32 − t 22 t 33 ), and
N ( z) = t11 + d1 (t11t 22 − t12 t 21 ) − d 2 (t11t 33 − t13 t 31 )
+ d1d 2 {t 21 (t12 t 33 − t13 t 32 ) + t 31 (t 22 t13 − t12 t 23 ) + t11 (t 23 t 32 − t 22 t 33 )}.
Comparing the denominator of the desired allpass transfer function with D (z ) we get
t 22 = z −1 , t 33 = 0, t 23 t 32 = z −2 . Next, comparing the numerator of the desired allpass
transfer function with N (z ) we get t11 = z −2 , t12 t 21 = z −1 ( z −2 − 1), t13 t 31 = 0, and
t 32 (t11t 23 − t 21t13 ) + t 31 (t 22 t13 − t12 t 23 ) = 1. Substituting the appropriate transfer
parameters from the previous equations into the last equation we simplify it to
t13 t 21t 32 + t 31t12 t 23 = z −4 − 1.
Since t13 t 31 = 0, either t13 = 0, or t 31 = 0. (Both cannot be simultaneously equal to zero,
as this will violate the condition t13 t 21t 32 + t 31t12 t 23 = z −4 − 1.
Consider the case t13 = 0. Then the above equation reduces to t 31t12 t 23 = z −4 − 1. From
this equation and t 23 t 32 = z −2 , it follows that t 32 = z −2 , t 23 = 1, t 31t12 = z −4 − 1
= ( z −1 − 1)( z −1 + 1)( z −2 + 1). There are four possible realizable sets of values of t 21 and
t 31 satisfying the last equation and t12 t 21 = z −1 ( z −2 − 1). These lead to 4 different
⎡ z−2
z − 2 − 1 0⎤
⎥
⎢ −1
realizable transfer matrices for the three-pair: Type 2A: ⎢ z
1 ⎥,
z −1
⎢z − 2 + 1
0⎥
z−2
⎦
⎣
−
2
−
1
−
2
−
⎡
⎡
z
z + 1 0⎤
z
z 1 − 1 0⎤
⎥
⎥
⎢
⎢
1⎥, Type 2C: ⎢ z −1 ( z −1 + 1)
1 ⎥,
Type 2B: ⎢ z −1 ( z −1 − 1)
z −1
z −1
⎢( z − 2 + 1)( z −1 − 1)
⎢( z − 2 + 1)( z −1 + 1)
0⎥
0⎥
z−2
z−2
⎦
⎦
⎣
⎣
−
2
⎡
1 0⎤
z
⎥
⎢ −1 − 2
Type 2D: ⎢ z ( z − 1) z −1 1 ⎥. A realization of each of the above Type 2 allpass
⎢ z−4 −1
z − 2 0⎥
⎦
⎣
structures is obtained by implementing its respective transfer matrix, and then constraining
the Y2 and X 2 variables through the multiplier d1 and constraining the Y3 and X 3
variables through the multiplier − d2 resulting in the four structures shown in Figure 8.25
of the text.
It can be easily shown that the allpass structures obtained for the case t 31 = 0 are precisely
the transpose of the structures of Figure 8.25.
8.37 A cascade of two Type 2D second-order allpass networks is shown below which requires 8
delays.
Not for sale
264
w[n _1]
x[n]
_1
+
_
z 1
_
z 1
a
b
+
w[n]
+
_
z 1
_
z 1
_1
c
+
_
z 1
y[n]
_1
_1
w[n _1]
+
d
+
_1
w[n _2]
w[n _2]
_
z 1
_1
z
z
By delay sharing between adjacent allpass sections we arrive at the following equivalent
realizations requiring now 6 delays.
x[n]
_1
w[n _ 2]
+
_
z 1
_
z 1
a
b
+
+
_1
w[n _1]
w[n]
_1
+
_
z 1
c
_
z 1
+
y[n]
d
+
_1
_
z 1
_
z 1
The minimum number of delays needed to implement a cascade of Type 2D second-order
allpass sections is thus 4 + 2( M − 1) = 2( M + 1).
d 2 + d1 z −1 + z −2
in the form of a constrained three-pair as indicated
1 + d1 z −1 + d 2 z − 2
in the solution of Problem 8.36. Comparing the numerator and the denominator of the
Type 3 allpass transfer function with N (z ) and D (z ) given in the solution of Problem 8.36
we arrive at
t 11= z −2 , t 22 = z −1 , t 22 = z −2 , t 33 = z −2 , t 23 t 32 = z −3 , t 12 t 212 = z −1 ( z −2 − 1),
8.38 We realize A2 ( z ) =
t 13 t 31= z −4 − 1, t 13 t 21t 32 + t 13 t 21t 23 = z −3 ( z −2 − 1) + z −1 ( z −4 − 1).
To solve the last four equations to arrive at a set of realizable set of values for the transfer
parameters, t12 , t 21 , t13 , t 31 , t 23 , and t 32 , we need to pre-select t 23 and t 32 satisfying the
condition t 23t 32 = z −3 , and then determine realizable values for the other transfer
parameters.
(a) Let t 23 = z −1 , t 32 = z −2 . There are 4 possible realizable sets of values of t12 , t 21 , t13 ,
and t 31 satisfying the constraints given above resulting in the following transfer matrices
of the three-pair:
Not for sale
265
⎡ z−2
⎡
z − 2 − 1 z − 2 − 1⎤
z−2
z −1 + 1 z −1 + 1⎤
⎥
⎥
⎢
⎢
Type 3A: ⎢ z −1
z −1
z −1 ⎥, Type 3B: ⎢ z −1 ( z −1 − 1)
z −1
z −1 ⎥,
⎢z − 2 + 1
⎢( z −1 − 1)( z − 2 + 1)
z−2
z−2 ⎥
z−2
z−2 ⎥
⎦
⎦
⎣
⎣
−
2
−
1
−
1
−
2
⎡
⎡
1
1 ⎤
z
z − 1 z − 1⎤
z
⎥
⎥
⎢
⎢
Type 3C: ⎢ z −1 ( z −1 + 1)
z −1
z −1 ⎥, Type 3D: ⎢ z −1 ( z − 2 − 1) z −1 z −1 ⎥.
⎢( z −1 + 1)( z − 2 + 1)
⎢ z−4 −1
z−2
z−2 ⎥
z−2 z−2 ⎥
⎦
⎦
⎣
⎣
(b) t 23 = z −2 , t 32 = z −1. This leads to 4 new realizations which are transpose of the 4
structures developed in Case (a).
(c) t 23 = 1, t 32 = z −3 . Here also there are 4 different realizations whose transfer matrices
are as given below:
⎡ z−2
z −1 ( z − 2 − 1) z − 2 − 1⎤
⎥
⎢
Type 3E: ⎢ 1
z −1
z −1 ⎥,
⎢z − 2 + 1
z−3
z−2 ⎥
⎦
⎣
−
2
−
1
−
1
⎡
z
z ( z + 1) z −1 + 1⎤
⎥
⎢
1 ⎥,
Type 3F: ⎢
z −1 − 1
z −1
⎢( z −1 − 1)( z − 2 + 1)
z−3
z−2 ⎥
⎦
⎣
−
2
−
1
−
1
−
1
⎡
⎡ z−2
1 ⎤
z
z ( z − 1) z − 1⎤
z −1
⎥
⎥
⎢
⎢
1 ⎥, Type 3H: ⎢ z − 2 − 1 z −1
1 ⎥.
Type 3G: ⎢
z −1 + 1
z −1
⎢( z −1 + 1)( z − 2 + 1)
⎢z − 4 − 1 z − 3 z − 2 ⎥
z −3
z−2 ⎥
⎦
⎦
⎣
⎣
(d) t 23 = z −3 , t 32 = 1. This leads to 4 new realizations which are transpose of the 4
structures developed in Case (b).
8.39 A cascade of two Type 3B second-order allpass networks is shown below which requires 8
delays.
+
+
_1
c
a
x[n]
_1
z
+
_1
_1
+
z
w[n]
_1
z
+
_
z 1
+
_1
z
b
_1
+
w[n _ 2]
Not for sale
z
d
w[n _1]
_
z 1
y[n]
_1
_1
_
z 1
+
266
By delay sharing between adjacent allpass sections we arrive at the following equivalent
realizations requiring now 7 delays.
+
+
_1
w[n _1]
a
x[n]
_1
z
_1
+
+
z
w[n]
_1
_1
c
_
z 1
+
z
z
d
w[n _ 2]
_1
_1
+
y[n]
_1
_
z 1
b
+
_
z 1
+
The minimum number of delays needed to implement a cascade of Type 3B second-order
allpass sections is thus 4 + 3( M − 1) = 3( M + 1).
8.40 From the transfer parameters given in Eq. (8.50d) we arrive at the input-output relations of
the two-pair as (1): Y1 = k m X1 + z −1 X 2 , and (2): Y2 = (1 − k m2 ) X1 − k m z −1 X 2 . A threemultiplier realization based on these two equations is shown below:
1 _ km2
+
X1
_k
km
Y1
Y2
m
_
z 1
+
X2
8.41 Eq. (2) in the solution of Problem 8.40 can be rewritten as:
2 X − k z −1 X = X − k (k X + z −1 X ). Substituting Eq. (1) of the
Y2 = X1 − k m
1
m
2
1
m m 1
2
solution of Problem 8.40 in this equation we then get (3): Y2 = X1 − k m Y1 . A
realization of the two-pair based on Eq. (3) and Eq. (1) of the solution of Problem 8.40
results in the lattice structure shown below:
X1
Y2
_k
m
km
Y1
z–1
X2
From Eqs. (1) and (2) of the solution of Problem 8.40 we arrive at the transfer
2,
parameters of the lattice two-pair given by t11 = k m , t12 = z −1 , t 21 = 1 − k m
t 22 = − k m z −1 . The corresponding chain parameters are obtained using Eq. (7.128b)
Not for sale
267
and are given by A =
km
k z −1
z −1
,B = m
,C=
,D=
.
2
2
2
2
1 − km
1 − km
1 − km
1 − km
1
X1 (z)
W 1 (z)
_k
_k
2
1
k1
k2
Y 1(z)
z
–1
z
–1
S 1 (z)
Hence, the input-output relation of the all-pole cascade lattice structure given above can
⎡ 1 k 2 z −1 ⎤ ⎡ 1 k1 z −1 ⎤ ⎡W1 ( z)⎤
⎡ X ( z )⎤
1
be expressed as: ⎢ 1 ⎥ =
⎥⎢
⎥⎢
⎢
⎥, from
z −1 ⎦⎥ ⎣⎢ k1 z −1 ⎦⎥ ⎣ S1 ( z ) ⎦
⎣ Y1 ( z ) ⎦ (1 − k 2 )(1 − k 2 ) ⎣⎢ k 2
2
which we obtain H r ( z ) =
1
(1 − k 22 )(1 − k12 )
W1 ( z )
.
=
X1 ( z ) 1 + k1 (1 + k 2 )z −1 + k 2 z − 2
X 1(z)
W 1 (z)
_k
_k
2
1
k1
k2
z–1
Y 1(z)
z–1
S 1 (z)
Likewise, from Section 8.8.1, we arrive at input-output relation of the all-pole cascade
⎡ X ( z )⎤ ⎡ 1 k 2 z −1 ⎤ ⎡ 1 k1 z −1 ⎤ ⎡W1 ( z )⎤
lattice structure given above as: ⎢ 1 ⎥ = ⎢
⎥⎢
⎥⎢
⎥, from
z −1 ⎥⎦ ⎢⎣ k1 z −1 ⎥⎦ ⎣ S1 ( z ) ⎦
⎣ Y1 ( z ) ⎦ ⎢⎣ k 2
W1 ( z)
1
.
=
X1 ( z) 1 + k1 (1 + k 2 )z −1 + k 2 z − 2
Now a second-order all-pole transfer function can also be expressed in terms of its
1
. Comparing the denominator of with that
poles as H ( z) =
1 − 2r cos(ω o )z −1 + r 2 z − 2
which we obtain H s ( z) =
of H s (z) and H r ( z), we observe k 2 = r 2 and k1 (1 + k 2 ) = −2r cos(ωo ). As r ≅ 1,
2r cos(ωo )
k1 = −
≅ − cos(ωo ). At the true resonance peak, we have
1+ r2
1
1
. Likewise, at ω = ωr , H s (e jωr ) =
. As
H (e ωr ) =
(1 − r 2 ) sin(ωo )
(1 − k 2 ) 1 = k12
r → 1, k 2 = r 2 → 1, and (1 − k12 )(1 − k 22 ) = (1 − k12 )(1 − k 2 )(1 + k 2 ) ≅ 2(1 − k12 )(1 − k 2 ).
Hence, at ω = ωr , H r (e jωr ) ≅
2(1 − k12 )(1 − k2 )
(1 − k 2 ) 1 − k12
= 2 1 − k12 = 2 sin(ωr ) . This
indicates that the gain at the peak resonance is approximately independent of the pole
Not for sale
268
radius as long as the pole angle is constant and the radius is close to 1.
3.9 + 2.3z −1 + z −2
8.42 (a) H1 ( z) =
. Choose A2 ( z ) =
0.5 + 0.3z −1 + z −2
. Note
1 + 0.3z −1 + 0.5z − 2
1 + 0.3z −1 + 0.5z − 2
k2 = A2 (∞) = d 2 = 0.5 < 1. Using Eq. (8.45) we next determine the coefficient d1' of
0.2 + z −1
the allpass transfer function A1 ( z) arriving at A1 ( z) =
. Here,
1 + 0.2 z −1
k1 = A1 (∞ ) = d1' = 0.2 < 1. Therefore, A2 ( z) and hence, H1 ( z) is stable.
The feed-forward coefficients are given by α1 = p2 = 1.0, α2 = p1 − α1d 1= 2.0,
α3 = p0 − α1d 2 −α2 d1' = 3.0. Final realization of H1 ( z) is as shown below:
X1
_
_
0.5
0.2
0.2
0.5
z
–1
z
–1
3
2
Yo
(b) H 2 ( z) =
2.6 + 0.74 z −1 + 3z −2
. Choose A2 ( z) =
0.4 − 0.42 z −1 + z −2
. Note
1 − 0.42 z −1 + 0.4 z − 2
1 − 0.42 z −1 + 0.4 z − 2
k2 = A2 (∞) = d 2 = 0.4 < 1. Using Eq. (8.45) we next determine the coefficient d1' of
− 0.3 + z −1
the allpass transfer function A1 ( z) arriving at A1 ( z ) =
. Here,
1 − 0.3z −1
k1 = A1 (∞ ) = d1' = 0.3 < 1. Therefore, A2 ( z) and hence, H 2 ( z) is stable.
The feed-forward coefficients are given by α1 = p2 = 3.0, α2 = p1 − α1d 1= 2.0,
α3 = p0 − α1d 2 −α2 d1' = 2.0. Final realization of H 2 ( z) is as shown below:
X1
_
0.4
_ 0.3
0.4
0.3
z–1
z
2
3
–1
2
Yo
(c) H 3 ( z) =
− 3 + 5.192 z −1 − 3.56 z −2 + 2 z −3
1 − 0.28 z −1 + 0.056 z − 2 + 0.4 z − 3
Not for sale
. Choose
269
A3 ( z) =
0.4 + 0.056 z −1 − 0.28z −2 + z −3
Note k3 = A3 (∞ ) = d3 = 0.4 < 1. Using
1 − 0.28z −1 + 0.056 z − 2 + 0.4 z − 3
Eq. (8.45) we next determine the coefficient d1' and d 2' of the allpass transfer function
0.2 − 0.36 z −1 + z −2
. Now k2 = A2 (∞) = d 2 = 0.2 < 1.
1 − 0.36 z −1 + 0.2 z − 2
Using Eq. (8.45) we next determine the coefficient d1" of the allpass transfer function
A2 ( z) arriving at A2 ( z) =
− 0.3 + z −1
A1 ( z) arriving at A1 ( z ) =
1 − 0.3z −1
. Here, k1 = A1 (∞ ) = d1' = 0.3 < 1. Therefore,
A3 ( z) and hence, H 3 ( z) is stable.
The feed-forward coefficients are given by α1 = p3 = 2.0, α 2 = p2 − α1d 1= −3.0,
α3 = p1 − α1d 2 −α2 d1' = 4.0, α 4 = p0 − α1d 3 −α2 d 2' − α3 d1" = −2.0. Final realization
of H 3 ( z) is as shown below:
X1
_ 0.4
_ 0.2
0.4
0.3
_
0.2
_1
_1
z
2
_
z1
z
_3
0.3
4
_2
Yo
(d) H 4 ( z) =
1.63 + 3.112 z −1 + 0.84 z −2 + 2 z −3
. Choose
1 + 0.42 z −1 + 0.056 z − 2 − 0.3z − 3
− 0.3 + 0.056 z −1 + 0.42 z −2 + z −3
A3 ( z) =
Note k3 = A3 (∞) = d3 = 0.3 < 1. Using
1 + 0.42 z −1 + 0.056 z − 2 − 0.3z − 3
Eq. (8.45) we next determine the coefficients d1' and d 2' of the allpass transfer function
A2 ( z) arriving at A2 ( z) =
0.2 + 0.48z −1 + z −2
.
1 + 0.48z −1 + 0.2 z − 2
Using Eq. (8.45) we next determine the coefficient
A1 ( z) arriving at A1 ( z) =
0.4 + z −1
1 + 0.4 z −1
Now k2 = A2 (∞) = d 2 = 0.2 < 1.
d1" of the allpass transfer function
. Here, k1 = A1 (∞ ) = d1' = 0.4 < 1. Therefore,
A3 ( z) and hence, H 4 ( z) is stable.
The feed-forward coefficients are given by α1 = p3 = 2.0, α 2 = p2 − α1d 1= 0,
α3 = p1 − α1d 2 −α2 d1' = 3.0, α 4 = p0 − α1d 3 −α2 d 2' − α3 d1" = 1.0. Final realization
of H 3 ( z) is as shown on the next page.
Not for sale
270
X1
_
0.4
_1
_
_1
z1
_1
z
0.6
z
3.2
2.2
Yo
2 + 0.6 z −1 − z −2 + 0.3z −3
(e) H 5 ( z ) =
. Choose
1 − 0.1z −1 + 0.18z − 2 + 0.08z − 3 − 0.08z − 4
− 0.08 + 0.08z −1 + 0.18 z −2 − 0.1z −3 + z −4
A4 ( z) =
. Note
1 − 0.1z −1 + 0.18 z − 2 + 0.08 z − 3 − 0.08z − 4
k 4 = A4 (∞) = d 4 = 0.08 < 1. Using Eq. (8.45) we next determine the coefficients
d1' , d 2' and d3' of the allpass transfer function A3 ( z) arriving at
A3 ( z) =
0.0725 + 0.195z −1 − 0.0942 z −2 + z −3
. Now
1 − 0.0942 z −1 + 0.1957z − 2 + 0.0725z − 3
k3 = A3 (∞) = d3' = 0.0725 < 1. Using Eq. (8.45) we next determine the coefficients d1"
and d 2" of the allpass transfer function A2 ( z) arriving at
A2 ( z ) =
0.2035 − 0.1090 z −1 + z −2
1 − 0.1090 z −1
+ 0.2035z − 2
. Now k 2 = A2 (∞) = d 2" = 0.2035 < 1. Using Eq.
(8.45) we next determine the coefficient d1' ' ' of the allpass transfer function A1 ( z)
arriving at A1 ( z ) =
− 0.009058 + z −1
1 − 0.0905z −1
. Here, k1 = A1 (∞) = d1' ' ' = 0.0905 < 1.
Therefore, A4 ( z) and hence, H 5 ( z ) is stable.
The feed-forward coefficients are given by α1 = p 4 = 0, α 2 = p3 − α1d 1= −0.3,
α3 = p2 − α1d 2 −α2 d1' = −1.0283, α 4 = p1 − α1d 3−α 2 d 2' − α 3 d1" = 0.5467,
α5 = p0 − α1d 4 −α2 d3' − α3 d 2" − α 4 d1' ' ' = 2.2805. Final realization of H 5 ( z ) is as
shown below:
X1
_
_ 0.0725
0.08
0.0725
_
0.3
0.0905
0.2035
_ 0.0905
_1
z1
_
0.2035
z
_
1.0283
_
z1
0.5467
_
z1
2.2805
Yo
8.43 (a) H1 ( z ) =
0.32 z −1 + 0.66 z −2 − 0.72 z −3
1 − 2.35z −1 + 3.36 z − 2 − 1.575z − 3
Not for sale
. Choose
271
− 1.575 + 3.36 z −1 − 2.35z −2 + z −3
. Note k3 = A3 (∞) = d3 = 1.575 > 1.
1 − 2.35z −1 + 3.36 z − 2 − 1.575z − 3
Therefore, A3 ( z) and hence, H 3 ( z) is unstable. Using Eq. (8.45) we next determine
A3 ( z) =
the coefficients d1' and d 2' of the allpass transfer function A2 ( z) arriving at
3.5105 − 2.6308z −1 + z −2
A2 ( z ) =
. Now k2 = A2 (∞) = d 2 = 3.5105 > 1. Using Eq.
1 − 2.6308z −1 + 3.5105z − 2
(8.45) we next determine the coefficient d1" of the allpass transfer function A1 ( z)
arriving at A1 ( z ) =
− 0.5833 + z −1
1 − 0.5833z −1
. Here, k1 = A1 (∞ ) = d1" = 0.5833 < 1.
The feed-forward coefficients are given by α1 = p3 = 2.0, α 2 = p2 − α1d 1= 0,
α3 = p1 − α1d 2 −α2 d1' = 3.0, α 4 = p0 − α1d 3 −α2 d 2' − α3 d1" = 1.0. Final realization
of H 3 ( z) is as shown below:
X1
_ 3.5105
1.575
_ 1.575
0.5833
_
3.5105
_1
0.5833
_1
z
_
z1
z
3
2
Yo
(b) H 2 ( z) =
9.3 − 39.3z −1 − 13.025z −2 + 6.552 z −3 + 1.9125z −4
. Choose
1 + 0.55z −1 + 0.095z − 2 − 0.01z − 3 − 0.003z − 4
− 0.003 − 0.01z −1 + 0.095z −2 + 0.55z −3 + z −4
A4 ( z) =
. Note
1 + 0.55z −1 + 0.095z − 2 − 0.01z − 3 − 0.003z − 4
k 4 = A4 (∞) = d 4 = 0.003 < 1. Using Eq. (8.45) we next determine the coefficients
d1' , d 2' and d3' of the allpass transfer function A3 ( z) arriving at
− 0.0084 + 0.0953z −1 + 0.55z −2 + z −3
A3 ( z) =
. Now
1 + 0.55z −1 + 0.0953z − 2 − 0.0084 z − 3
k3 = A3 (∞ ) = d3' = 0.0084 < 1. Using Eq. (8.45) we next determine the coefficients
d1" and d 2" of the allpass transfer function A2 ( z) arriving at
0.0999 + 0.5508z −1 + z −2
A2 ( z) =
. Now k2 = A2 (∞) = d 2 = 0.0999 < 1. Using Eq.
1 + 0.5508z −1 + 0.0999z − 2
(8.45) we next determine the coefficient d1" of the allpass transfer function A1 ( z)
arriving at A1 ( z ) =
0.5088 + z −1
1 + 0.5088z −1
. Here, k1 = A1 (∞ ) = d1" = 0.5088 < 1. As a result,
A3 ( z) , and hence, H 2 ( z) is stable.
Not for sale
272
The feed-forward coefficients are given by
α1 = p 4 = 1.9125, α 2 = p3 − α1d 1= 5.5001, α 3 = p 2 − α1d 2 −α 2 d1' = −16.2316,
α 4 = p1 − α1d 3−α 2 d 2' − α 3 d1" = −30.8644,
α 5 = p0 − α1d 4 −α 2 d 3' − α 3 d 3" − α 4 d 4' ' ' = 26.4295. Final realization of H 2 (z ) is as
shown below:
X1
_
0.003
0.0084
0.003
_ 0.0084
_
0.0999
_
_
z1
_ 30.8644
1.6985
_
z 1
_
z 1
_ 0.7198
+
0.1891
0.1574
+
+
_
z 1
y[n]
+
+
1.6985
0.2545
26.4295
Yo
. A direct form II realization of
+
1 − 0.1891z −1 + 0.7198 z − 2 − 0.1574 z − 3
H (z ) is shown below:
(b) H ( z ) =
z
_ 16.2316
0.2545(1 + 1.6985 z −1 + 1.6985 z −2 + z −3 )
x[n]
_1
z1
5.5001
1.9125
0.5088
0.5088
_
z1
8.44 (a) H ( z ) =
_
0.0999
0.2545(1 + z −1 )(1 + 0.6985 z −1 + z
−2
)
(1 − 0.2169 z −1 )(1 + 0.0278 z −1 + 0.7258 z
H (z ) is shown below:
−2
. A cascade realization of
)
0.2545
x[n]
+
+
+
+
y[n]
_
z 1
_
z 1
_
+
0.6985
0.0278
0.2169
+
_
z 1
_ 0.7285
(c) We first form A3 ( z) =
− 0.1574 + 0.71985z −1 − 0.1891z −2 + z −3
1 − 0.1891z −1 + 0.7198z − 2 − 0.1574 z − 3
. Now
k3 = A3 (∞ ) = d3' = 0.1574 < 1. Using Eq. (8.45) we next determine the coefficients
d1" and d 2" of the allpass transfer function A2 ( z) arriving at
Not for sale
273
0.7075 − 0.0777z −1 + z −2
. Now k2 = A2 (∞) = d 2 = 0.7075 < 1. Using Eq.
1 − 0.0777z −1 + 0.7075z − 2
(8.45) we next determine the coefficient d1" of the allpass transfer function A1 ( z)
A2 ( z ) =
arriving at A1 ( z ) =
− 0.0455 + z −1
. Here, k1 = A1 (∞ ) = d1" = 0.0455 < 1.
1 − 0.0455z −1
The feed-forward coefficients are given by α1 = p3 = 0.2545, α2 = p2 − α1d 1= 0.4804,
α3 = p1 − α1d 2 −α2 d1' = 0.2864, α 4 = p0 − α1d 3 −α2 d 2' − α3 d1" = −0.0323. The
Gray-Markel realization of H (z ) is as shown below:
X1
_
0.1574
_ 0.1574
0.0455
0.7075
_ 0.0455
0.7075
_1
_1
z
0.4804
0.2545
_1
z
z
_ 0.0323
0.2864
Yo
(d) Using Eqs. (8.132a) and (8.132b) we determine the coefficients of H 2 ( z) :
1.6309 + 0.8456 z −1 + z −2
H 2 ( z) =
. Next, using Eqs. (8.132a) and (8.132b) we
1 + 0.0676 z −1 + 0.8529z − 2
− 1.8808 + z −1
. A cascaded lattice
determine the coefficients of H1 ( z) : H1 ( z) =
1 + 1.6718z −1
realization of using the method of Problem 8.30 is thus as shown below:
X1
_
0.1574
1.6309
0.2545
Y1
0.2545
0.8529
z
–1
z
_
1.6718
_
1.8808
–1
z
–1
A comparison of the hardware requirements of the four realizations is as follows:
Direct form: No. of multipliers = 7 and no. of 2-input adders = 6,
Cascade form: No. of multipliers = 10 and no. of 2-input adders = 9,
Gray-Markel realization: No. of multipliers = 5 and no. of 2-input adders = 6,
Cascaded lattice realization: No. of multipliers = 6 and no. of 2-input adders = 6.
Hence, the Gray-Markel realization has the smallest hardware requirements.
8.45 (a) A partial-fraction expansion of G (z ) is of the form
N /2
N /2
N /2
υi
υi
υi*
d
+
G( z ) = d +
. If we define H ( z ) = +
, then we can
*
−
z
−
λ
z
λ
2
z
−
λ
i
i
i
i =1
i =1
i =1
∑
∑
∑
Not for sale
274
write G( z) = H ( z) + H* ( z), where H* ( z) represents the transfer function obtained from
H (z ) by conjugating its coefficients.
(b) In this case, the partial-fraction expansion of G (z ) is of the form
Nr
N /2
N /2
c
c
ρi
υi
υi*
, where N r and N c are the number
G( z) = d +
+
+
*
z
−
ξ
z
−
λ
z
−
λ
i
i
i
i =1
i =1
i =1
of real poles ξ i ’s and complex poles λi ’s, respectively, with residues ρi ’s and υi ’s.
∑
∑
∑
We can thus decompose G (z ) as G( z) = H ( z) + H* ( z), where
N
N /2
c
r
ρi / 2
υi
d
.
H (z) = +
+
z
−
λ
2 i =1 z − ξ i
i
i =1
∑
∑
(c) An implementation of real coefficient G (z ) is thus simply a parallel connection of
two complex-coefficient filters characterized by transfer functions H (z ) and H* ( z) as
indicated in the figure below:
x[n]
x[n]
H(z)
real
imaginary
H* (z)
=0
However, for a real-valued input x[ n], the output of H (z ) is the complex conjugate of
that of H* ( z). As a result, two times the real part of the output of H (z ) is the desired
real-valued output sequence y[n] indicating that a single complex-coefficient filter
H (z ) is sufficient to realize G (z ) as indicated below:
2
x[n]
H(z)
y[n]
Y ( z)
A + jB
=
, we arrive at the difference equation
X ( z ) 1 + (α + j β ) z − 1
representation yre [ n] + j yim [ n] = −(α + jβ )(yre [ n − 1] + j yim [ n − 1]) + Ax[ n] + jBx[ n],
which is equivalent to a set of two difference equations involving all real variables and
real multiplier coefficients: yre [ n] = −α yre [ n − 1] + β yim [ n − 1] + A x[ n] and
yim [ n] = − β yre [ n − 1] − α yim [ n − 1] + B x[ n]. A realization of H (z ) based on the last
two equations is shown on next page.
To determine the transfer function Yre ( z) / X ( z ), we take the z -transform of the last
8.46 From H ( z) =
two difference equations and arrive at (1 + α z −1 )Yre ( z) − β z −1Yim ( z) = A X ( z) and
β z −1Yre ( z ) + (1 + α z −1 )Yim ( z ) = B X ( z). Solving these two equations we get
Not for sale
275
Yre ( z )
A + ( Aα + Bβ )z −1
, which is seen to be a second-order transfer
=
X ( z ) 1 + 2αz −1 + (α 2 + β 2 )z − 2
function.
A
y re [n]
x[n]
_α
–1
z
_β
B
y im [n]
_α
z
–1
β
To determine the transfer function Yre ( z) / X ( z ), we take the z -transform of the last
two difference equations and arrive at (1 + α z −1 )Yre ( z) − β z −1Yim ( z) = A X ( z) and
β z −1Yre ( z ) + (1 + α z −1 )Yim ( z ) = B X ( z). Solving these two equations we get
Yre ( z )
A + ( Aα + Bβ )z −1
, which is seen to be a second-order transfer
=
X ( z ) 1 + 2αz −1 + (α 2 + β 2 )z − 2
function.
8.47 An m -th order complex allpass function is given by
* + α * z −1 + L + α * z − m + 1 + z − m
αm
m −1
1
. To generate an ( m − 1) –th
Am ( z ) =
−
1
−
2
1 + α 1 z + α 2 z + L + + α m −1 z − m + 1 + α m z − m
* ⎤
⎡ A (z) − km
Pm −1 ( z )
= z⎢ m
⎥.
Dm −1 ( z )
⎢⎣ 1 − k m Am ( z ) ⎦⎥
Substituting the expression for A m (z ) in the above equation we obtain after some
−2 + L + α * z − m + 1 + z − m
* + α * z −1 + α *
algebra Pm −1 ( z ) = z[α m
1
m −1
m−2z
order allpass function, we use the recursion Am −1 ( z) =
− m + 1 + α z − m )]
* (1 + α z −1 + α z −2 + L + α
− αm
1
2
m −1 z
m
* −1 − α m
* α1 ) + (α m
* − 2 − αm
* α 2 ) z − 1 + L + (α1* − α m
* α m − 1 ) z − m + 2 + (1 − α m ) z − m + 1 ,
= (α m
2
and Dm −1 ( z) = 1 + α1 z −1 + α 2 z −2 + L + α m −1 z − m +1 + α m z − m
* + α * z −1 + L + α * z − m + 1 + z − m )
− α m (α m
1
m −1
* − 2 ) z − 2 + L + (α m − 1 − α m α1* ) z − m + 1 .
* − 1 ) z − 1 + (α 2 − α m α m
= (1 − α m ) + (α1 − α m α m
Thus, A m −1 ( z) is a complex allpass function of order m − 1 and given by
2
Not for sale
276
Am −1 ( z ) =
−1 + L + β * z − m + 2 + z − m + 1
*
*
βm
−1 + β m − 2 z
1
, where
1
2
−
−
1 + β1 z + β 2 z + L + β m − 2 z − m + 2 + β m −1 z − m + 1
*
α − αm αm
− k 1 ≤ k ≤ m − 1.
,
βk = k
2
1 − αm
To develop a realization of A m (z ) we express A m (z ) in terms of Am −1 ( z ) :
k * − z −1 Am −1 ( z )
Y
, and compare it with Eq. (8.47) resulting in the
Am ( z ) = 1 = m
X1 1 + k m z −1 Am −1 ( z )
*,
following expressions for the transfer parameters of the two-pair: t11 = k m
* )z −1 . As in the case of the realization of a real
t 22 = − k m z −1 , and t12 t 21 = (1 − k m k m
allpass function, there are many possible choices for t12 and t 21. We choose
* )z −1 , t = 1. The corresponding input-output relations of the two-pair
t12 = (1 − k m k m
21
* X + (1 − k * k )z −1 X = k * ( X − k z −1 X ) + z −1 X and
are: Y1 = k m
1
m m
2
m 1
m
2
2
Y2 = X1 − k m z −1 X 2 . A realization of A m (z ) based on the above two-pair relations is
indicated below:
X1
_k
A m (z)
Y2
m
A m _1(z)
*
km
Y1
z
X2
–1
−1 ⎞
⎛ 1 + z −1 ⎞ 1 ⎛ 8 + 8 z −1 ⎞ 1 ⎛
⎟ = ⎜ 1 + 3 + 5z ⎟ = 1 ( A0 ( z ) + A1 ( z )),
⎟= ⎜
8.48 (a) H1 ( z ) = 4⎜
⎜ 5 + 3z −1 ⎟ 2 ⎜ 5 + 3z − 1 ⎟ 2 ⎜
5 + 3z −1 ⎟⎠ 2
⎝
⎠
⎝
⎠
⎝
3 + 5z −1
where A0 ( z) = 1 and A1 ( z ) =
.
5 + 3z − 1
−1 ⎞
⎛ 5 − 5z − 1 ⎞ 1 ⎛ 5 − 5z −1 ⎞ 1 ⎛
⎟ = ⎜ 1 − − 2 + 3z ⎟ = 1 ( A0 ( z ) − A1 ( z )),
⎟= ⎜
(b) H 2 ( z ) = ⎜⎜
⎜
⎜
−1 ⎟
−1 ⎟
3 − 2 z −1 ⎟⎠ 2
⎝ 6 − 4z ⎠ 2 ⎝ 3 − 2z ⎠ 2 ⎝
− 2 + 3z −1
where A0 ( z) = 1 and A1 ( z ) =
.
3 − 2 z −1
0.5414(1 − z −1 )(1 − 0.0757z −1 + z −2 )
1
= [A0 ( z ) − A1 ( z)], where
(c) H 3 ( z) =
1
1
2
−
−
−
(1 − 0.1768z )(1 − 0.004 z + 0.9061z ) 2
A0 ( z) =
0.9061 − 0.004 z −1 + z −2
1 − 0.004 z −1 + 0.9061z − 2
(d) H 4 ( z) =
and A1 ( z ) =
− 0.1768 + z −1
1 − 0.1768z −1
0.4547(1 + z −1 )(1 − 0.2859z −1 + z −2 )
(1 + 0.0712 z −1 )(1 − 0.0377z −1 + 0.8482 z − 2 )
Not for sale
=
.
1
[A0 ( z) − A1( z)] , where
2
277
A0 ( z ) =
0.0712 + z −1
1 + 0.0712 z −1
and A1 ( z) =
0.8482 − 0.0377z −1 + z −2
1 − 0.0377z −1 + 0.8482 z − 2
.
8.49 (a) From the given equation we get
y[ 2l] = h[ 0] x[ 2l ] + h[1] x[ 2l − 1] + h[ 2] x[ 2l − 2] + h[3] x[ 2l − 3] + h[ 4] x[ 2l − 4] + h[ 5] x[ 2l − 5].
y[ 2l + 1] = h[ 0] x[ 2l + 1] + h[1] x[ 2l] + h[ 2] x[ 2l − 1] + h[3] x[ 2l − 2] + h[ 4] x[ 2l − 3] + h[ 5] x[ 2l − 4].
Rewriting the above equations in matrix form we arrive at
⎡ y[2l] ⎤ ⎡h[0] 0 ⎤ ⎡ x[2l] ⎤ ⎡h[2] h[1] ⎤ ⎡ x[2l − 2]⎤
⎢ y[2l + 1]⎥ = ⎢ h[1] h[0]⎥ ⎢ x[2l + 1]⎥ + ⎢ h[3] h[2]⎥ ⎢ x[2l − 1] ⎥
⎣
⎦ ⎣
⎦ ⎣
⎦⎣
⎦
⎦⎣
⎡h[ 4] h[3]⎤ ⎡ x[2l − 4]⎤ ⎡0 h[5]⎤ ⎡ x[2l] ⎤
+⎢
⎥+⎢
⎥⎢
⎥,
⎥⎢
⎣ h[5] h[ 4]⎦ ⎣ x[2l − 3]⎦ ⎣0 0 ⎦ ⎣ x[2l + 1]⎦
which can be alternately expressed as Yl = H 0 X l + H1X l −1 + H 2 X l − 2 + H 3 X l − 3 ,
⎡ y[2l] ⎤
⎡ x[2l] ⎤
⎡h[0] 0 ⎤
⎡h[2] h[1] ⎤
where Yl = ⎢
, H1 = ⎢
, H0 = ⎢
, Xl = ⎢
⎥
⎥
⎥
⎥,
⎣ y[2l + 1]⎦
⎣ x[2l + 1]⎦
⎣ h[1] h[0]⎦
⎣ h[3] h[2]⎦
⎡h[ 4] h[3]⎤
⎡0 h[5]⎤
H2 = ⎢
, H3 = ⎢
⎥
⎥.
⎣ h[5] h[ 4]⎦
⎣0 0 ⎦
(b) Here we have
y[3l ] = h[ 0] x[3l] + h[1] x[3l − 1] + h[ 2] x[3l − 2] + h[3] x[3l − 3] + h[ 4] x[3l − 4] + h[ 5] x[3l − 5].
y[3l + 1] = h[0]x[3l + 1] + h[1]x[3l] + h[2]x[3l − 1] + h[3]x[3l − 2] + h[ 4]x[3l − 3] + h[5]x[3l − 4],
y[3l + 2] = h[0]x[3l + 2] + h[1]x[3l + 1] + h[2]x[3l] + h[3]x[3l − 1] + h[ 4]x[3l − 2] + h[5]x[3l − 3].
Rewriting the above equations in matrix form we arrive at
0 ⎤ ⎡ x[3l] ⎤ ⎡ h[3] h[2] h[1] ⎤ ⎡ x[3l − 3]⎤
⎡ y[3l] ⎤ ⎡h[0] 0
⎢ y[3l + 1] ⎥ = ⎢ h[1] h[0] 0 ⎥ ⎢ x[3l + 1] ⎥ + ⎢h[ 4] h[3] h[2]⎥ ⎢ x[3l − 2]⎥
⎥
⎥⎢
⎥ ⎢
⎥⎢
⎥ ⎢
⎢
⎢⎣ y[3l + 2]⎥⎦ ⎢⎣h[2] h[1] h[0]⎥⎦ ⎢⎣ x[3l + 2]⎥⎦ ⎢⎣ h[5] h[ 4] h[3]⎥⎦ ⎢⎣ x[3l − 1] ⎥⎦
⎡0 h[2] h[1] ⎤ ⎡ x[3l − 6]⎤
+ ⎢⎢0 0 h[2]⎥⎥ ⎢⎢ x[3l − 5]⎥⎥,
⎢⎣0 0
0 ⎥⎦ ⎢⎣ x[3l − 4]⎥⎦
which can be alternately expressed as Yl = H 0 X l + H1X l −1 + H 2 X l − 2 , where
0 ⎤
⎡ h[3] h[2] h[1] ⎤
⎡h[0] 0
⎡ x[3l] ⎤
⎡ y[3l] ⎤
⎥
⎢
⎥
⎢
⎥
⎢
Y l = ⎢ y[3l + 1] ⎥, X l = ⎢ x[3l + 1] ⎥, H 0 = ⎢ h[1] h[0] 0 ⎥, H1 = ⎢⎢h[ 4] h[3] h[2]⎥⎥,
⎢⎣ h[5] h[ 4] h[3]⎥⎦
⎢⎣h[2] h[1] h[0]⎥⎦
⎢⎣ x[3l + 2]⎥⎦
⎢⎣ y[3l + 2]⎥⎦
Not for sale
278
⎡0 h[2] h[1] ⎤
and H 2 = ⎢⎢0 0 h[2]⎥⎥.
⎢⎣0 0
0 ⎥⎦
(c) Following a procedure similar to that outlined in Parts (a) and (b) above, we can
show that here Yl = H 0 X l + H1X l −1 + H 2 X l − 2 , where
⎡ y[ 4l] ⎤
⎢ y[ 4l + 1] ⎥
⎥,
Yl = ⎢
⎢ y[ 4l + 2]⎥
⎢
⎥
⎣ y[ 4l + 3]⎦
⎡h[ 4] h[3]
⎢ h[5] h[ 4]
H1 = ⎢
⎢ 0
h[5]
⎢
0
⎣ 0
⎡h[0]
⎡ x[ 4l] ⎤
⎢ h[1]
⎢ x[ 4l + 1] ⎥
⎢
⎥
, H0 = ⎢
Xl =
⎢h[2]
⎢ x[ 4l + 2]⎥
⎢
⎢
⎥
⎣ h[3]
⎣ x[ 4l + 3]⎦
h[2] h[1] ⎤
⎡0 0 0
⎢0 0 0
⎥
h[3] h[2]⎥
, H2 = ⎢
⎢0 0 0
h[ 4] h[3]⎥
⎢
⎥
h[5] h[ 4]⎦
⎣0 0 0
0
h[0]
h[1]
h[2]
h[5]⎤
0 ⎥⎥
.
0 ⎥
⎥
0 ⎦
0
0 ⎤
0
0 ⎥⎥
,
h[0] 0 ⎥
⎥
h[1] h[0]⎦
8.50 (a) d 0 y[2l] + d1 y[2l − 1] + d 2 y[2l − 2] + d3 y[2l − 3] + d 4 y[2l − 4]
= p0 x[2l] + p1 x[2l − 1] + p2 x[2l − 2] + p3 x[2l − 3] + p4 x[2l − 4],
d 0 y[2l + 1] + d1 y[2l] + d 2 y[2l − 1] + d3 y[2l − 2] + d 4 y[2l − 3]
= p0 x[2l + 1] + p1 x[2l] + p2 x[2l − 1] + p3 x[2l − 2] + p 4 x[2l − 3].
Rewriting the above equations in matrix form we arrive at
⎡ d 0 0 ⎤ ⎡ y[2l] ⎤ ⎡ d 2 d1 ⎤ ⎡ y[2l − 2]⎤ ⎡ d 4 d3 ⎤ ⎡ y[2l − 4]⎤
⎥⎢
⎢d d ⎥ ⎢
⎥ + ⎢d
⎥ + ⎢ 0 d ⎥ ⎢ y[2l − 3]⎥
d
[
2
1
]
[
2
1
]
y
y
l
l
+
−
⎣
⎦
⎣
⎦ ⎣
⎦
1
0
3
2
4⎦⎣
⎣
⎦
⎣
⎦
0 ⎤ ⎡ x[2l] ⎤ ⎡ p2 p1 ⎤ ⎡ x[2l − 2]⎤ ⎡ p 4
⎡p
=⎢ 0
⎥⎢
⎥⎢
⎥+⎢
⎥+⎢
⎣ p1 p0 ⎦ ⎣ x[2l + 1]⎦ ⎣ p3 p2 ⎦ ⎣ x[2l − 1] ⎦ ⎣ 0
The above matrix equation can be alternately expressed as
p3 ⎤ ⎡ x[2l − 4]⎤
.
p 4 ⎥⎦ ⎢⎣ x[2l − 3]⎥⎦
⎡ y[2l] ⎤
D 0Yl + D1Yl −1 + D 2Yl − 2 = P 0 X l + P1 X l −1 + P 2 X l − 2 , where Yl = ⎢
⎥,
⎣ y[2l + 1]⎦
d1 ⎤
0⎤
d3 ⎤
⎡d
⎡d
⎡d
⎡ x[2l] ⎤
Xl = ⎢
, D0 = ⎢ 0
, D1 = ⎢ 2
, D2 = ⎢ 4
⎥
⎥
⎥,
⎥
⎣ x[2l + 1]⎦
⎣ 0 d4 ⎦
⎣ d1 d 0 ⎦
⎣ d3 d2 ⎦
⎡p
P0 = ⎢ 0
⎣ p1
⎡d0
(b) ⎢⎢ d1
⎢⎣ d 2
0⎤
⎡p
, P1 = ⎢ 2
⎥
p0 ⎦
⎣ p3
0
d0
d1
p1 ⎤
⎡p
, and P2 = ⎢ 4
⎥
p2 ⎦
⎣0
0 ⎤ ⎡ y[3l] ⎤ ⎡ d3
0 ⎥⎥ ⎢⎢ y[3l + 1] ⎥⎥ + ⎢⎢ d 4
d 0 ⎥⎦ ⎢⎣ y[3l + 2]⎥⎦ ⎢⎣ 0
d2
d3
d4
p3 ⎤
.
p4 ⎥⎦
d1 ⎤ ⎡ y[3l] − 3⎤ ⎡0 0 d 4 ⎤ ⎡ y[3l − 6]⎤
d 2 ⎥⎥ ⎢⎢ y[3l − 2]⎥⎥ + ⎢⎢0 0 0 ⎥⎥ ⎢⎢ y[3l − 5]⎥⎥
d3 ⎥⎦ ⎢⎣ y[3l − 1] ⎥⎦ ⎢⎣0 0 0 ⎥⎦ ⎢⎣ y[3l − 4]⎥⎦
Not for sale
279
0 ⎤ ⎡ x[3l] ⎤ ⎡ p3
⎡ p0 0
⎢
= ⎢ p1 p0 0 ⎥⎥ ⎢⎢ x[3l + 1] ⎥⎥ + ⎢⎢ p 4
⎢⎣ p2 p1 p0 ⎥⎦ ⎢⎣ x[3l + 2]⎥⎦ ⎢⎣ 0
which can be alternately expressed as
D 0 Yl + D1Yl −1 + D 2 Yl − 2
p2
p3
p4
p1 ⎤ ⎡ x[3l] − 3⎤ ⎡0 0
p2 ⎥⎥ ⎢⎢ x[3l − 2]⎥⎥ + ⎢⎢0 0
p3 ⎥⎦ ⎢⎣ x[3l − 1] ⎥⎦ ⎢⎣0 0
p4 ⎤ ⎡ x[3l − 6]⎤
0 ⎥⎥ ⎢⎢ x[3l − 5]⎥⎥ ,
0 ⎥⎦ ⎢⎣ x[3l − 4]⎥⎦
⎡ y[3l] ⎤
= P0 X l + P1X l −1 + P2 X l − 2 , where D 0 = ⎢⎢ y[3l + 1] ⎥⎥,
⎢⎣ y[3l + 2]⎥⎦
0
0⎤
⎡ d3 d 2 d1 ⎤
⎡0 0 d 4 ⎤
⎥
⎥
⎢
d 0 0 ⎥, D1 = ⎢ d 4 d3 d 2 ⎥, D 2 = ⎢⎢0 0 0 ⎥⎥,
⎢⎣ 0 d 4 d3 ⎥⎦
⎢⎣0 0 0 ⎥⎦
d1 d 0 ⎥⎦
⎡ x[3l] ⎤
⎡d0
⎥
⎢
P 0 = ⎢ x[3l + 1] ⎥, D 0 = ⎢⎢ d1
⎢⎣ x[3l + 2]⎥⎦
⎢⎣ d 2
0⎤
⎡ p0 0
⎡ p3
⎢
⎥
P0 = ⎢ p1 p0 0 ⎥, P1 = ⎢⎢ p 4
⎢⎣ p2 p1 p0 ⎥⎦
⎢⎣ 0
p2
p3
p4
p1 ⎤
⎡0 0
⎥
p2 ⎥, and P 2 = ⎢⎢0 0
⎢⎣0 0
p3 ⎥⎦
p4 ⎤
0 ⎥⎥.
0 ⎥⎦
0
0 ⎤ ⎡ y[ 4l] ⎤ ⎡ d 4 d3 d 2 d1 ⎤ ⎡ y[ 4l − 4]⎤
⎡d0 0
⎢d d
0
0 ⎥⎥ ⎢⎢ y[ 4l + 1] ⎥⎥ ⎢⎢ 0 d 4 d3 d 2 ⎥⎥ ⎢⎢ y[ 4l − 3]⎥⎥
1
0
⎢
+
(c)
⎢ d 2 d1 d 0 0 ⎥ ⎢ y[ 4l + 2]⎥ ⎢ 0
0 d 4 d3 ⎥ ⎢ y[ 4l − 2]⎥
⎢
⎥⎢
⎥⎢
⎥ ⎢
⎥
0
0 d 4 ⎦ ⎣ y[ 4l − 1] ⎦
⎣ d3 d 2 d1 d 0 ⎦ ⎣ y[ 4l + 3]⎦ ⎣ 0
0
0 ⎤ ⎡ x[ 4l] ⎤ ⎡ p 4 p3 p2 p1 ⎤ ⎡ x[ 4l − 4]⎤
⎡ p0 0
⎢p
p0 0
0 ⎥⎥ ⎢⎢ x[ 4l + 1] ⎥⎥ ⎢⎢ 0 p 4 p3 p2 ⎥⎥ ⎢⎢ x[ 4l − 3]⎥⎥
=⎢ 1
+
, which can be
⎢ p2 p1 p0 0 ⎥ ⎢ x[ 4l + 2]⎥ ⎢ 0
0 p 4 p3 ⎥ ⎢ x[ 4l − 2]⎥
⎢
⎥⎢
⎥⎢
⎥ ⎢
⎥
0
0 p4 ⎦ ⎣ x[ 4l − 1] ⎦
⎣ p3 p2 p1 p0 ⎦ ⎣ x[ 4l + 3]⎦ ⎣ 0
alternately written as D 0 Yl + D1Yl −1 + D 2 Yl − 2 = P0 X l + P1X l −1 + P2 X l − 2 , where
⎡d0
⎡ y[ 4l] ⎤
⎡ x[ 4l] ⎤
⎢d
⎢ y[ 4l + 1] ⎥
⎢ x[ 4l + 1] ⎥
⎥, X l = ⎢
⎥, D 0 = ⎢ 1
Yl = ⎢
⎢d2
⎢ y[ 4l + 2]⎥
⎢ x[ 4l + 2]⎥
⎢
⎢
⎥
⎢
⎥
⎣ y[ 4l + 3]⎦
⎣ x[ 4l + 3]⎦
⎣ d3
0
⎡ p0 0
⎡ d 4 d3 d 2 d1 ⎤
⎢
⎢0 d
⎥
p
p0 0
4 d3 d 2 ⎥
D1 = ⎢
, P0 = ⎢ 1
⎢ p2 p1 p0
⎢0
0 d 4 d3 ⎥
⎢
⎢
⎥
0
0 d4 ⎦
⎣0
⎣ p3 p2 p1
0
d0
d1
d2
0
0
d0
d1
0⎤
0 ⎥⎥
,
0⎥
⎥
d0 ⎦
0⎤
⎡ p4
⎥
⎢0
0⎥
, and P 1 = ⎢
⎢0
0⎥
⎥
⎢
p0 ⎦
⎣0
p3
p4
0
0
p2
p3
p4
0
p1 ⎤
p2 ⎥⎥
.
p3 ⎥
⎥
p4 ⎦
8.51 We first rewrite the second-order block difference equation
D 0 Yl + D1Yl −1 + D 2 Yl − 2 = P0 X l + P1X l −1 + P2 X l − 2 ,
as two separate equations: Wl = P0 X l + P1X l −1 + P2 X l − 2 , and
Not for sale
280
Yl = − D 0−1D1Yl −1 − D 0−1D 2 Yl − 2 + D 0−1Wl . As cascade realization of the IIR block
digital filter based on the last two equations is thus as shown below:
Wk
Xk
_1
D0
P0
Yk
∆
∆
D1
P1
∆
∆
D2
P2
By interchanging the locations of the two block sections in the above structure we arrive at
an equivalent realization as indicated below:
_1
Xk
D0
P0
Yk
∆
∆
D1
P1
∆
∆
P2
D2
Finally, by delay-sharing the above structure reduces to a canonic realization as shown
below:
Xk
_1
D0
P0
Yk
∆
D1
P1
∆
D2
P2
8.51 By setting α = ± β sin θ in Eq. (8.125), the state-space description of the sine-cosine
Not for sale
281
⎡ s [ n + 1] ⎤ ⎡cos ωo
generator reduces to ⎢ 1
⎥=⎢
⎣ s 2 [ n + 1]⎦ ⎢⎣ m
multiplier realization shown below:
cos ω o
s 2[n+1]
cos ω o
+
_ sin 2ω o
_1
z
8.53 Let −
± sin 2 ωo ⎤ ⎡ s 1[ n] ⎤
⎥⎢
⎥, which leads to the threecos ωo ⎥⎦ ⎣ s 2 [ n]⎦
s 2[n]
s 1[n+1]
_1
z
s 1[n]
_
+
− sin 2 ωo cos 2 ωo − 1
β sin ωo
α
=
= cos ωo − 1, and
= 1 + cos ωo . Then sin ωo =
α
β
cos ωo + 1 cos ωo + 1
β
sin ωo = cos ωo + 1. Substituting these values in Eq. (8.125) we arrive at
α
cos ωo − 1⎤ ⎡ s 1[ n] ⎤
⎡ s1[ n + 1] ⎤ ⎡ cos ωo
⎢ s [ n + 1]⎥ = ⎢cos ω + 1 cos ω ⎥ ⎢ s [ n]⎥. These equations can be alternately written
o
o ⎦⎣ 2
⎣ 2
⎦ ⎣
⎦
as s1[ n + 1] = cos ωo (s1[ n] + s 2 [ n]) − s 2 [ n], and s 2 [ n + 1] = cos ωo (s1[ n] + s 2 [ n]) + s 2 [ n].
A realization based on the last two equations results in a single-multiplier structure as
indicated below:
−
s 2[n+1]
_1
z
s 2[n]
_1
s 1[n+1]
_
z1
s 1[n]
cos ω o
⎡
⎡ s1[ n + 1] ⎤ ⎢0
8.54 ⎢
⎥=
⎣ s 2 [ n + 1]⎦ ⎢0
⎣
⎡
α(C − cos ωo ) ⎤
C
[
1
]
+
s
n
⎡ 1
⎤ ⎢
⎥
+⎢
β sin ωo
⎥ ⎢⎣ s 2 [ n + 1]⎥⎦ ⎢ β
0
− sin ωo
⎦
⎣⎢ α
α(1 − C cos ωo ) ⎤
⎥ ⎡ s1[ n] ⎤
β sin ωo
. If
⎥⎢
s 2 [ n]⎥⎦
⎣
⎥
cos ωo
⎦⎥
C = 1, then
⎡ s1[ n + 1] ⎤
⎢ s [ n + 1]⎥
⎣ 2
⎦
⎡
α(1 − cos ωo ) ⎤
1
⎡ s1[ n + 1] ⎤ ⎢
⎥
+⎢
β sin ωo
⎥ ⎢⎣ s 2 [ n + 1]⎥⎦ ⎢ β
0
− sin ωo
⎦
⎢⎣ α
β sin ω o . Then the above equation reduces to
⎡
0
=⎢
⎢
⎣0
Choose α =
α(1 − 1 cos ωo ) ⎤
β sin ωo ⎥ ⎡ s1[ n] ⎤.
⎥⎢
⎥
⎥ ⎣ s 2 [ n]⎦
cos ωo
⎦⎥
⎡ s1 [ n + 1] ⎤ ⎡0 1 − cos ωo ⎤ ⎡ s1 [ n + 1] ⎤ ⎡ 1 1 − cos ωo ⎤ ⎡ s1 [ n] ⎤
⎢ s [ n + 1]⎥ = ⎢
⎥ ⎢ s [ n + 1]⎥ + ⎢ − 1 cos ω ⎥ ⎢ s [ n]⎥.
0
⎦⎣ 2
o ⎦⎣ 2
⎣ 2
⎦ ⎣0
⎦ ⎣
⎦
A two-multiplier realization of the above equation is shown below:
Not for sale
282
_1
1 _ cos ω o
_
_
z1
s 2[n+1]
cos ω o
s 2[n]
s 1[n+1]
z1
s 1[n]
To arrive at a one-multiplier realization we observe that the two equations describing the
sine-cosine generator are given by
s1[n + 1] = (1 − cos ωo ) s2 [n + 1] + s1[n] + (1 − cos ωo ) s2 [n], and
s2 [n + 1] = − s1[n] + cosωo ⋅s2 [n]. Substituting the second equation in the first we arrive at
an alternate description in the form s1[n + 1] = − cos ωo ⋅ s2 [n + 1] + s2 [n], and
s2 [n + 1] = − s1[n] + cosωo ⋅s2 [n]. A realization of these two equations leads to the singlemultiplier structure shown below:
_1
s 2[n+1]
_
z1
s 2[n]
cos ω o
s 1[n+1]
_
z1
s 1[n]
_1
_1
z
8.55 From Figure P8.18(a), the input-output relation of the channel is given
H12 ( z )⎤ ⎡ X1 ( z ) ⎤
⎡Y (z) ⎤ ⎡ 1
. Likewise, the input-output relation of the
by ⎢ 1 ⎥ = ⎢
1 ⎥⎦ ⎢⎣ X 2 ( z )⎥⎦
⎣Y2 ( z )⎦ ⎣ H 21 ( z)
channel separation circuit of Figure P8.18(b) is given by
1
− G12 ( z )⎤ ⎡ Y1 ( z) ⎤
⎡ V1 ( z ) ⎤ ⎡
⎢V ( z )⎥ = ⎢ − G ( z )
⎥ ⎢Y ( z)⎥. Hence, the overall system is characterized by
1
21
⎣ 2 ⎦ ⎣
⎦⎣ 2 ⎦
H12 ( z)⎤ ⎡ X1 ( z) ⎤
1
− G12 ( z )⎤ ⎡ 1
⎡ V1 ( z ) ⎤ ⎡
⎢V ( z )⎥ = ⎢ − G ( z)
⎥
⎢
1
1 ⎥⎦ ⎢⎣ X 2 ( z)⎥⎦
21
⎣ 2 ⎦ ⎣
⎦ ⎣ H 21 ( z)
⎡1 − H 21 ( z)G12 ( z) H12 ( z ) − G12 ( z ) ⎤ ⎡ X1 ( z ) ⎤
=⎢
⎥⎢
⎥.
⎣ H 21 ( z ) − G21 ( z) 1 − H12 ( z)G21 ( z )⎦ ⎣ X 2 ( z )⎦
The cross-talk is eliminated if V1 ( z) is a function of either X1 ( z) or X 2 ( z), and similarly,
if V2 ( z) is a function of either X1 ( z) or X 2 ( z). From the above equation it follows that if
H 12 ( z) = G12 ( z), and H 21( z) = G 21( z), then V1 ( z) = (1 − H 21 ( z)G12 ( z))X1 ( z), and
−1 ( z ), and G ( z ) = H −1 ( z ),
V2 ( z) = (1 − H12 ( z)G21 ( z))X 2 ( z). Alternately, if G12 ( z ) = H 21
21
12
Not for sale
283
⎛ H ( z )H 21 ( z) − 1 ⎞
⎛ H ( z )H 21 ( z) − 1 ⎞
⎟⎟ X 2 ( z), and V2 ( z ) = ⎜⎜ 12
⎟⎟ X1 ( z).
then V1 ( z ) = ⎜⎜ 12
H 21 ( z)
H12 ( z)
⎠
⎠
⎝
⎝
M8.1 (a) Using the M-file factor, we factorize H1 ( z) resulting in
H1 ( z) = −0.24(1 − 2.5z −1 )(1 − 0.4 z −1 )(1 + z −1 + z − 2 )(1 + 0.8z −1 + 0.6 z − 2 ).
4
3
6
3
A cascade realization of H1 ( z) based on the above factored form is shown below:
_ 0.24
x[n]
+
z
z
z
z
_ 2.5
_1
_1
_1
_ 0.5
y[n]
+
+
+
_1
4/3
0.8
+
+
_1
_1
z
z
6/3
0.6
(b) Using the M-file factor, we factorize H 2 ( z) resulting in
H 2 ( z ) = 4(1 − 3.8508 z −1 )(1 + 2.5z −1 )(1 − 1.5403 z −1 )(1 + 0.4 z −1 )(1 − 0.649 z −1 )(1 − 0.2597 z −1 ).
A cascade realization of H 2 ( z) based on the above factored form is shown below:
4
x[n]
+
_1
+
_1
z
z
_
+
1.5403
z
_
0.4
y[n]
_1
z
z
_
2.5
3.8508
_1
_1
z
+
+
+
_1
0.649
_
0.2597
(c) Using the M-file factor, we factorize H 3 ( z) resulting in
H 3 ( z ) = −0.24(1 + z −1 )(1 − z −1 )(1 − 1.4024z −1 )(1 − 0.71306z −1 )(1 + 1.3488z −1 + z −2 ).
A cascade realization of H 3 ( z) based on the above factored form is shown below:
_ 0.24
+
x[n]
_1
z
+
_1
+
_1
z
z
_1
y[n]
_1
z
z
_ 1.4024
+
+
_1
_ 0.71306
1.3488
+
_1
z
(d) Using the M-file factor, we factorize H 4 ( z) resulting in
H 4 ( z ) = 4(1 + z −1 )(1 − z −1 )(1 − 4.6735 z −1 )(1 − 0.214 z −1 )(1 + 1.4675 z −1 + z −2 ).
A cascade realization of H 4 ( z) based on the above factored form is shown below:
Not for sale
284
4
+
x[n]
_1
+
_1
z
+
_1
z
z
_1
z
z
_1
y[n]
+
+
_1
_ 0.214
_ 4.6735
1.4675
+
_1
z
M8.2 (a) Using the M-file factor, we factorize the numerator and the denominator of G (z )
resulting in G ( z ) =
0.3901(1 + 1.4891z −1 + z −2 )(1 + 0.1582 z −1 + z −2 )
(1 − 0.06147 z −1 + 0.70426 z − 2 )(1 + 0.5653 z −1 + 0.2228 z − 2 )
.
(b) We can write
⎞
⎛
⎞⎛ 1 + 0.1582 z −1 + z − 2
1 + 1.4891z −1 + z − 2
⎟.
⎜
⎟⎜
G ( z ) = 0.3901
⎜ 1 − 0.06147 z −1 + 0.70426 z − 2 ⎟⎜ 1 + 0.5653 z −1 + 0.2228 z − 2 ⎟
⎠
⎝
⎠⎝
cascade realization of G (z ) based on the above decomposition is shown on next page:
A
0.3901
+
+
x[n]
+
_ 0.56527
1.4891
0.1582
+
+
+
_
z 1
_
z 1
_
y[n]
_
z 1
_
z 1
0.06147
+
+
_ 0.2228
0.70426
Alternately, we can write
⎞
⎛
⎞⎛
1 + 0.1582 z −1 + z − 2
1 + 1.4891z −1 + z − 2
⎟.
⎟⎜
G ( z ) = 0.3901⎜
⎜ 1 − 0.06147 z −1 + 0.70426 z − 2 ⎟⎜ 1 + 0.5653 z −1 + 0.2228 z − 2 ⎟
⎠
⎝
⎠⎝
A cascade realization of G (z ) based on the above decomposition is shown below:
0.3901
x[n]
+
+
+
0.1582
+
_ 0.56527
0.70426
1.4891
+
+
_
z 1
_
z 1
_
y[n]
_
z 1
_
z 1
0.06147
+
+
_ 0.2228
(c) A partial-fraction expansion of G (z ) in z −1 obtained using the M-file residuez is
given by G ( z ) = 2.4863 +
− 0.3481 − 0.11128 z −1
1 − 0.06147 z −1 + 0.70425 z − 2
Not for sale
+
− 1.7481 + 0.4094 z −1
1 + 0.5653 z −1 + 0.2228 z − 2
285
.
A Parallel Form I realization of G (z ) based on the above expansion is shown on the left
side top of next page.
(d) A partial-fraction expansion of G (z ) in z obtained using the M-file residue is given
− 0.1327 z −1 + 0.2451z −1
by G ( z ) = 0.3901 +
+
0.5787 z −1 + 0.3895 z −2
. A
1 − 0.06147 z −1 + 0.70425 z − 2 1 + 0.5653 z −1 + 0.2228 z − 2
Parallel Form II realization of G (z ) based on the above expansion is shown on the right
side top of next page.
M8.3 (a) Using the M-file factor, we factorize the numerator and the denominator of H (z )
resulting in H ( z ) =
0.3549(1 + 0.5958 z −1 + z −2 )(1 − 0.03169 z −1 + z −2 )
(1 + 0.6209 z −1 + 0.9845 z − 2 )(1 + 0.6313 z −1 + 0.5681z − 2 )
.
2.4863
0.3901
_ 0.3481
x[n]
+
+
+
y[n]
x[n]
_
z 1
+
+
_
z 1
0.06147
_1
_ 0.70425
_ 0.11128
+
z
_
_
+
y[n]
_
z 1
0.70425
0.2451
+
_1
_
z 1
z
_ 0.5653
_ 0.5653
+
+
1.7481
+
+
_ 0.1327
0.06147
0.4094
0.5787
+
_1
+
_1
z
z
_ 0.2228
_ 0.2228
0.3895
(b) We can write
⎛
⎞⎛ 1 − 0.03169 z −1 + z − 2 ⎞
1 + 0.5958 z −1 + z − 2
⎟.
⎟⎜
H ( z ) = 0.3549⎜
⎜ 1 + 0.620986 z −1 + 0.9845 z − 2 ⎟⎜ 1 + 0.6313 z −1 + 0.5683 z − 2 ⎟
⎠
⎝
⎠⎝
A cascade realization of H (z ) based on the above decomposition is shown on top of the
next page.
Alternately, we can write
⎞
⎛ 1 − 0.03169 z −1 + z − 2 ⎞⎛ 1 + 0.5958 z −1 + z − 2
⎟.
⎟⎜
H ( z ) = 0.3549⎜
⎜ 1 + 0.6209 z −1 + 0.9845 z − 2 ⎟⎜ 1 + 0.6313 z −1 + 0.5683 z − 2 ⎟
⎠
⎝
⎠⎝
Not for sale
286
0.3549
+
+
x[n]
+
+
_
z 1
_
z 1
_
+
y[n]
0.5958
0.6209
+
+
_ 0.03169
_ 0.6313
+
_
z 1
_
z 1
_ 0.9845
_ 0.5683
A cascade realization of H (z ) based on the decomposition given at the bottom of the
previous page is shown below:
0.3549
+
+
x[n]
+
+
_
z 1
_
z 1
_
+
_ 0.03169
0.6209
y[n]
+
+
_ 0.6313
0.5958
+
_
z 1
_
z 1
_ 0.9845
_ 0.5683
(c)
A partial-fraction expansion of G (z ) in z −1 obtained using the M-file
residuez is given by
− 0.0133 + 0.0094 z −1
H ( z ) = 0.6343 +
− 0.2661 − 0.4299 z −1
+
. A Parallel
1 + 0.6209 z −1 + 0.9845 z − 2 1 + 0.6313 z −1 + 0.5683 z − 2
Form I realization of G (z ) based on the above expansion is shown below on the left side.
0.6343
x[n]
_ 0.0133
+
0.3549
+
+
y[n]
x[n]
+
_1
_
z 1
z
_ 0.6209
_ 0.6209
0.0094
+
_
z 1
_
_
_ 0.2661
+
0.9845
y[n]
0.0131
_
z 1
z
_ 0.6313
_ 0.4299
+
+
+
_1
_ 0.6313
+
_
z 1
0.9845
+
0.0177
+
_ 0.2619
+
+
_1
_1
z
z
_ 0.5683
_ 0.5683
Not for sale
0.1512
287
(d) A partial-fraction expansion of G (z ) in z obtained using the M-file residue is given
− 0.0177 z −1 + 0.0131z −1
by G ( z ) = 0.3549 +
+
− 0.2619 z −1 + 0.1512 z −2
. A Parallel
1 + 0.6209 z −1 + 0.9845 z − 2 1 + 0.6313 z −1 + 0.5683 z − 2
Form II realization of G (z ) based on the above expansion is shown at the bottom of the
previous page on the right side.
M8.4
Lattice parameters are
0.1393
0.6973
0.3131
0.1569
Feedforward multipliers are
0.3901
0.4461
0.3212
0.0727
-0.0488
The Gray-Markel tapped cascaded lattice realization of G (z ) is shown on next page:
x[n]
_ 0.1569
_ 0.3131
0.3131
0.1569
_1
M8.5
0.1393
0.6973
_1
z
0.3901
_ 0.1393
_ 0.6973
0.4461
_1
_1
z
z
z
0.3212
0.0727
_ 0.0488
y[n]
Lattice parameters are
0.3171
0.9949
0.3986
0.5595
Feedforward multipliers are
03549
-0.2442
0.2642
-0.0082
-0.0066
The Gray-Markel tapped cascaded lattice realization of H (z ) is shown below:
x[n]
_ 0.5595
_ 0.3986
0.3986
0.5595
_1
0.3549
_ 0.9949
_ 0.3171
0.3171
0.9949
_1
z
z
_ 0.2442
0.2642
_1
z
_ 0.0082
_1
z
_ 0.0066
y[n]
M8.6 (a) (b) Program 8_7 generated the following error messages for the FIR transfer functions
of Parts (a) and (b):
??? Error using ==> signal\private\levdown
At least one of the reflection coefficients is equal to one.
The algorithm fails for this case.
(c) (d) Program 8_7 generated the following error messages for the FIR transfer functions
of Parts (c) and (d):
Warning: Divide by zero.
Lattice coefficients are
Not for sale
288
-1 NaN NaN NaN NaN NaN
M8.7 (a) Using the M-file tf2ca we arrive at the parallel allpass decomposition of G (z ) as:
G( z) =
1
2
A1 ( z ) =
[A0 ( z ) + A1 ( z )],
where A0 ( z ) =
0.8041 − 0.8171z −1 + z −2
− 0.2440 + 1.2092 z −1 − 1.1436 z −2 + z −3
1 − 1.1436 z −1 + 1.2092 z − 2 − 0.2440 z − 3
.
1 − 0.8171z −1 + 0.8041z − 2
(b) The power-complementary transfer function is then given by H ( z ) =
=
0.524(1 − 3.0011z −1 + 4.9948 z −2 − 4.9948 z −3 + 3.0011z −4 − z −5
1 − 1.9606 z −1 + 2.9473 z − 2 − 2.1511z − 3 + 1.1713 z − 4 − 0.1961z − 5
(c)
jω 2
Magnitude Square
and
1
2
[A0 ( z ) − A1 ( z )]
.
jω 2
|G(e )| +|H(e )|
1
jω 2
0.8
jω 2
|G(e )|
|H(e )|
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
M8.8 (a) Using the M-file tf2ca we arrive at the parallel allpass decomposition of G (z ) as:
G( z) =
1
2
[A0 (z) − A1 (z)], where
A0 ( z ) =
0.9077 + 0.6205z −1 + z −2
1 + 0.6205z −1 + 0.9077z − 2
0.3325 + 1.2027z −1 + 0.9522 z −2 + z −3
A1 ( z) =
.
1 + 0.9522 z −1 + 1.2027z − 2 + 0.3325z − 3
and
(b) The power-complementary transfer function is then given by H ( z) =
=
(1 + 2.3334 z −1 + 3.7759 z −2 + 3.7759 z −3 + 2.3334 z −4 + z −5
1 + 1.5727 z −1 + 2.712 z − 2 + 1.9431z − 3 + 1.2979 z − 4 +0.3018 z − 5
1
2
[A0 (z) + A1 (z)]
.
(c)
Not for sale
289
|G(e ω | +|H(e ω |
Magnitude Square
j 2
1
|H(e ω |
|G(e ω |
j 2
0.8
j 2
j 2
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
M8.9 The transfer function given cannot be realized as a parallel connection of two real allpass
sections as the degree difference between the two allpass transfer functions must be 2.
M8.10 The MATLAB program for the simulation of the sine-cosine generator of Problem 8.53
is given below:
s10 = 0.1; s20 = 0.1; a = 0.8;
y1 = zeros(1,50); y2 = y1;
for n = 1:50;
y1(n) = a*(s10 + s20) - s20;
y2(n) = a*(s10 +s20) + s10;
s10 = y1(n);
s20 = y2(n);
end
y1max = max(y1);y2max = max(y2);
k = 1:50;
stem (k-1,y1/y1max);
xlabel('Time index n');ylabel('Amplitude');
title('y_1[n]');
pause
stem(k-1,y2/y2max);
xlabel('Time index n');ylabel('Amplitude');
title('y_2[n]');
The plots generated by the above program for initial conditions s1[-1] s2[-1] =
0.1 are shown below:
Not for sale
290
y 2[n]
1
0.5
0.5
Amplitude
Amplitude
y 1[n]
1
0
-0.5
-1
0
-0.5
0
10
20
30
Time index n
40
50
-1
0
10
20
30
Time index n
40
50
The outputs are zero for zero initial conditions. Non-zero initial conditions of equal values
appear to have no effects on the outputs. However, unequal initial conditions have effects
on the amplitudes and phases of the two output sequences.
M8.11 The MATLAB program for the simulation of the sine-cosine generator of Problem 8.53
is given below:
s10 = 0.1; s20 = 1; a = 0.8;
y1 = zeros(1,50); y2 = y1;
for n = 1:50;
y1(n) = -s20 +a*s10;
y2(n) = -a*y1(n) + s10;
s10 = y1(n); s20 = y2(n);
end
y1max = max(y1);y2max = max(y2);
k = 1:50;
stem (k-1,y1/y1max);
xlabel('Time index n');ylabel('Amplitude');
title('y_1[n]');
pause
stem(k-1,y2/y2max);
xlabel('Time index n');ylabel('Amplitude');
title('y_2[n]');
The plots generated by the above program for initial conditions s1[-1] s2[-1] =
0.1 are shown on top of the next page.:
The outputs are zero for zero initial conditions. Non-zero initial conditions of equal values
appear to have no effects on the outputs. However, unequal initial conditions have effects
on the amplitudes and phases of the two output sequences.
Not for sale
291
y 1[n]
y 2[n]
1
1
0.5
Amplitude
Amplitude
0.5
0
-0.5
-1
0
-0.5
0
10
20
30
Time index n
40
50
Not for sale
-1
0
10
20
30
Time index n
40
50
292
Chapter 9
9.1
We obtain the solutions by using Eq. (9.3) and Eq. (9.4).
−α p / 20
= 1 − 10 − 0.21 / 20 = 0.0239, δ s = 10 − α s / 20 = 10 − 53 / 20 = 0.0022
−α p / 20
= 1 − 10 − 0.17 / 20 = 0.0194,
(a) δ p = 1 − 10
(b) δ p = 1 − 10
δ s = 10 −α s / 20 = 10 − 78 / 20 = 1.26 × 10 − 4 .
9.2
We obtain the solutions by using Eq. (9.3) and Eq. (9.4).
(a) α p = −20 log10 1 − δ p = −20 log10 (1 − 0.02) = 0.1755 dB,
(
)
(
)
α s = −20 log10 (δ s ) = −20 log10 (0.03) = 30.458 dB.
(b) α p = −20 log10 1 − δ p = −20 log10 (1 − 0.055) = 0.4914 dB,
α s = −20 log10 (δ s ) = −20 log10 (0.033) = 29.630 dB.
2
9.3
jω
jω
2 jω
jω
2 jω
G( z ) = H 2 ( z ), or equivalently, G(e ) = H (e ). G(e ) = H (e ) = H (e ) .
Let δ p and δ s denote the passband and stopband ripples of H (e jω ) , respectively. Also,
let δ p,2 = 2δ p, and δ s,2 denote the passband and stopband ripples of G(e jω ) ,
respectively. Then δ p,2 = 1 − (1 − δ p ) 2 , and δ s,2 = (δ s ) 2 . For a cascade of M sections,
δ p, M = 1 − (1 − δ p ) M , and δ s,M = (δ s ) M .
9.4
HLP (e j )
HHP (e
1 p
1– p
1– p
1
0
– s
– p
)
p
s
s
–
j
š
p
s
–
–( – p ) –( – )
s
š
0
s
Therefore, the passband edge and the stopband edge of the highpass filter are given by
ω p,HP = π − ω p , and ω s,HP = π − ω s , respectively.
9.5
Note that G (z ) is a complex bandpass filter with a passband in the range 0 ≤ ω ≤ π . Its
passband edges are at ω p,BP = ωo ± ω p , and stopband edges at ω s, BP = ω o ± ω s . A real
coefficient bandpass transfer function can be generated according to
Not for sale
293
p
G BP ( z ) = H LP (e jωo z ) + H LP (e – jωo z ) which will have a passband in the range 0 ≤ ω ≤ π
and another passband in the range – π ≤ ω ≤ 0. However because of the overlap of the two
spectra a simple formula for the bandedges cannot be derived.
HLP (e
j
)
j
G(e )
1 p
1– p
1
1– p
s
s
–
0
– s
– p
š
0
–
s
p
o
9.6 (a) h p (t ) = ha (t ) ⋅ p(t ) where p(t ) =
∞
n = −∞
h p (t)e stdt
p
o
p
o
s
ha (nT) (t nT) .
ha (t) e st dt and
nT)e st dt
h a (nT) (t
h a (nT)e snT .
n
g[n]z n
Comparing the above expression with G(z)
n
H p (s)
o
n
n
conclude that G(z)
š
o
s
∑ δ(t − nT ). Thus, h p (t)
ha (nT). Now, Ha (s)
We also have, g[n]
H p (s)
p
s
h a (nT)z n , we
n
.
1
ln z
T
We can also show that a Fourier series expansion of p(t) is given by
1
e j(2 kt / T) .
Therefore,
p(t)
Tk
h p (t)
1
Tk
e j (2 kt / T) h a (t)
H p (s)
1
Tk
Ha s
G(z)
j
1
Tk
ha (t) e j(2 kt / T) . Hence,
2 kt
. As a result, we have
T
1
Tk
Ha s
j
2 kt
.
1
T
s
ln z
(7-1)
T
e sT . If we express
e oT e j oT . Therefore,
(b) The transformation from the s -plane to z -plane is given by z
s
o
j o , then we can write z
re j
Not for sale
294
1, for o 1,
z
1, for o 1, Or in other words, a point in the left-half s -plane is mapped onto
1, for o 1.
a point inside the unit circle in the z -plane, a point in the right-half s -plane is mapped
onto a point outside the unit circle in the z -plane, and a point on the j -axis in the s plane is mapped onto a point on the unit circle in the z -plane. As a result, the mapping has
the desirable properties enumerated in Section 9.1.3.
(c) However, all points in the s -plane defined by s
mapped onto a single point in the z -plane as z
mapping is illustrated in the figure below
e
j o
o
oT
j(
e
o
j
2 k
, k
T
2 k
)T
T
j
e
0,,1,2,K , are
oT
e
j
oT
. The
Im z
3š
T
š
T
1
1
Re z
– šT
3š
– T
s -plane
z -plane
Note that the strip of width 2π / T in the s -plane for values of s in the range
/T
/ T is mapped into the entire z -plane, and so are the adjacent strips of
width 2π / T . The mapping is many-to-one with infinite number of such strips of width
2π / T .
It follows from the above figure and also from Eq. (7-1) that if the frequency response
1
j
, and there is no aliasing.
Ha (j ) 0 for
, then G(e )
H a ( j ), for
T
T
T
(d) For z
9.7
ej
e j T . Or equivalently,
T.
∫
Assume ha (t ) is causal. Now, ha (t ) = H a (s )e st ds. Hence,
∫
g[ n] = ha (nT ) = H a ( s ) e snT ds.
G( z ) =
∞
∑
n =0
g[ n]z −n =
∞
∑∫
Therefore,
H a (s )e snT z −n ds = H a (s )
∫
n =0
Not for sale
∞
∑ z −n e snT ds = ∫ 1 − easT z −1 ds .
H (s )
n =0
295
Hence G( z ) =
⎡ H a (s) ⎤
Residues⎢
.
sT −1 ⎥
−
e
z
1
⎣
⎦
all poles of H a ( s )
∑
A
. The transfer function has a pole at s = −α. Now
s+α
⎡
⎤
A
A
A
G( z) = Residue⎢
.
=
⎥=
sT
−
1
sT
−
1
−
α T −1
at s = – α ⎣⎢ (s + α)(1 − e z ) ⎦⎥ 1 − e z
1
e
z
−
s= – α
9.8 H a ( s ) =
9.9
(a) H a (s ) =
4(3s + 7)
2
(s + 2)(s + 4s + 5)
=
−4
2−6j
2+6j
+
+
s + 2 (s + 2 + j ) (s + 2 − j )
(− 12 ) ⋅ 12 .
4s − 4
4(s + 2 )
−4
−4
+
=
+
+
s + 2 (s + 2 )2 + 12 s + 2 (s + 2 )2 + 12 (s + 2 )2 + 12
Using Eqs. (9.58), (9.60), and (9.62), we get
=
G a (z ) =
−4
1− e
− 2T − 1
+
z
(
− 1 − 2T
1 − 2z e
−1 −2 T
z e
+
−4
1 − 0.5488 z −1
=
+
(
z
,
)
1 − 1.0486 z −1 + 0.3012 z −2
+
1 − 0.5488 z −1
(s
sin (T )
4 1 − 0.5243z −1
−4
(b) H b (s ) =
cos(T ) + e
− 4T − 2
cos(T ) + e − 4T z − 2
−1 − 2T
1 − 2z e
where T = 0.3. Therefore,
G a (z ) =
)
4 1 − z −1e − 2T cos(T )
+
4 − 1.935z −1
1 − 1.0486 z −1 + 0.3012 z −2
8s 2 + 37s + 56
)
=
0.1622 z −1
1 − 1.0486 z −1 + 0.3012 z − 2
.
2
3 + 0. 5 j
s − 0 .5 j
+
+
(s + 4 ) (s + 1 + 3 j ) (s + 1 − 3 j )
+ 2 s + 10 (s + 4 )
2
6s + 9
2
6(s + 1)
3(3)
=
+
=
+
.
+
2
2
2
s + 4 (s + 1) + 9 s + 4 (s + 1) + 3
(s + 1)2 + 32
Using Eqs. (9.58), (9.60), and (9.62), we get
Gb (z ) =
2
2
1 − e − 4T z − 1
+6
1 − 2 z −1e − T cos(3T ) + e − 2T z − 2
+3
where T = 0.3. Therefore,
Gb (z ) =
4
1 − 0.3012 z −1
+
1 − z −1e −T cos(3T )
z −1e −T sin (3T )
1 − 2 z −1e −T cos(3T ) + e − 2T z − 2
(
6 1 − 0.4605z −1
)
1 − 0.9210 z −1 + 0.5489z −2
Not for sale
+
,
(
3 0.5803z −1
)
1 − 0.9210 z −1 + 0.5489z −2
296
=
4
1 − 0.3012 z −1
(s + 2 )
1 − 0.9210 z −1 + 0.5489 z −2
4s + 1
− 3s + 2
(s 2 + 2s + 5)(s 2 + s + 4) (s 2 + 2s + 5) (s 2 + s + 4)
4(s + 2 )
2
6 − 1.0221z −1
s 3 + s 2 + 6 s + 14
(c) H c (s ) =
=
+
2
+1
+
− 7(1)
(s + 2 )
2
+
2
+1
=
+
− 3(s + 0.5)
(s + 0.5)2 + (
15 / 2
)
2
+
(s + 0.5)2 + (
Using Eqs. (9.58), (9.60), and (9.62), we get
Gc (z ) = (4 )
+ (− 3)
1 − e −2T cos(T )z −1
+ (− 7 )
1 − 2e − 2T cos(T )z −1 + e − 4T z − 2
(
)
1 − e −T / 2 cos 15T / 2 z −1
(
)
1 − 2e − 2T cos 15T / 2 z −1 + e − T z − 2
where T = 0.3. Hence,
Gc (z ) =
(
4 1 − 0.5243z −1
)
1 − 1.0486 z −1 + 0.3012 z −2
(
− 3 1 − 0.7195z −1
)
1 − 1.4390 z −1 + 0.7408z − 2
9.10 (a) G a (z ) =
3z
z − e −1.5
+
4z
z − e −1.8
=
−
+
(
15 / 2
1 − 2e − 2T cos(T )z −1 + e − 4T z − 2
+ 7 / 15
(
(
1 − 1.4390 z −1 + 0.7408z − 2
z − e − α1T
+
A2 z
z − e − α 2T
=
.
.
3
4
+
.
s + 7 .5 s + 9
ze −β T sin (λT )
(b) H b (s ) = Gb (z ) z = 4⎛ 1+ s ⎞ =
⎜
⎟
⎝ 1− s ⎠
2
1+ s ⎞⎤
⎡ 1+ s ⎞⎤ + 4
⎟
⎟⎥ + 3⎢4⎛⎜
s
1
−
⎝
⎠⎦
⎣ ⎝ 1− s ⎠⎥⎦
2
1+ s ⎞⎤
⎡ 1+ s ⎞⎤ + 6
⎟
⎟⎥ + 4 ⎢4⎛⎜
⎝ 1− s ⎠ ⎦
⎣ ⎝ 1− s ⎠⎥⎦
10 ⎡ 4⎛⎜
⎢⎣
54 ⎡ 4⎛⎜
⎢⎣
)
1 − 2e − 2T cos 15T / 2 z −1 + e − T z − 2
z 2 − 2 ze − β T cos(λT ) + e − 2β T
7.5
Since T = 0.2, λ = 7.5, β = 6, it follows H b (s ) =
(s + 6 )2 + 7.52
⎝ 1− s ⎠
)
e −T / 2 sin 15T / 2 z −1
)
0.8538z −1
z 2 − 2 ze −1.2 cos(1.5) + e − 2.4
⎢⎣
.
1 − 1.0486 z −1 + 0.3012 z −2
ze −1.2 sin (1.5)
9.11 (a) H a (s ) = G a (z ) z = 4⎛ 1+ s ⎞ =
⎜
⎟
)2
1.1353z −1
A1 z
4 ⎡4⎛⎜
)
e −2T sin (T )z −1
Since T = 0.2, α 1 = 7.5, α 2 9, A1 = 3, A2 = 4 , it follows H a (s ) =
(b) Gb (z ) =
(
7 / 15 15 / 2
3
=
.
(
16 s 2 + 3s + 4
).
75s 2 + 154 s + 91
2
1+ s ⎞⎤
⎡ 1+ s ⎞⎤ + 26 ⎡4⎛ 1+ s ⎞⎤ +18
⎟⎥ + 62 ⎢4⎛⎜
⎟
⎢⎣ ⎜⎝ 1− s ⎟⎠⎥⎦
⎝ 1− s ⎠⎦
⎣ ⎝ 1− s ⎠⎥⎦
2
⎛ 3⎡4⎛ 1+ s ⎞⎤ +1 ⎞⎛⎜ 12 ⎡4⎛ 1+ s ⎞⎤ − 4 ⎡4⎛ 1+ s ⎞⎤ + 8 ⎞⎟
⎜ ⎢ ⎜ 1− s ⎟⎥ ⎟⎜ ⎢ ⎜ 1− s ⎟⎥
⎢⎣ ⎜⎝ 1− s ⎟⎠⎥⎦ ⎟
⎠⎦ ⎠⎝ ⎣ ⎝
⎠⎦
⎝ ⎣ ⎝
⎠
Not for sale
297
,
=
(
− (5 + 3s ) 425s 2 + 846 s + 457
(
4(13s + 11) 27s 2 + 46 s + 23
9.12 For the impulse invariance design:
(
)
).
)(
)
ω p = Ω p T = 2 πFp T = 2π 0.45 × 10 3 0.3 × 10 − 3 = 0.27π
For the bilinear transformation method:
⎛ Ω pT ⎞
⎟ = 2 tan −1 Fp Tπ = 2 tan −1 0.45 × 10 3 ⋅ 0.3 × 10 − 3 ⋅ π = 0.2554 π
ω p = 2 tan −1 ⎜⎜
⎟
⎝ 2 ⎠
ωp
0.56 π
9.13 For the impulse invariance method: 2 πFp =
⇒ Fp = 1.4 kHz
=
T
0.2 × 10 −3
For the bilinear transformation method:
⎛ ωp ⎞ 1
1
⎛ 0.56 π ⎞
⎟⋅
Fp = tan⎜⎜
tan
⋅
= 1.923 kHz.
=
⎟
⎜
⎟
⎝ 2 ⎠ π 0.2 × 10 − 3
⎝ 2 ⎠ πT
(
)
(
(
)
)
9.14 The passband and the stopband edges of the analog lowpass filter are assumed to
Ω p = 0.25π and s 0.55 . The requirements to be satisfied by the analog
lowpass filter are thus 20log10 H a ( j 0.25π) ≥ −0.5 dB and
20log10 H a ( j 0.55π) ≤ −15 dB.
From α p = 20log10 ( 1 + ε 2 ) = 0.5 we obtain 2 0.1220184543. From
2
we obtain A 2 31.6227766 . From Eq. (4.32), the inverse
s 10 log10 (A ) 15
1
A2 − 1
=
= 15.841979 and from Eq. (4.31) the inverse
k1
ε
1 Ωs
= 2.2 . Substituting these values in Eq. (4.35) we
transition ratio is given by =
k Ωp
discrimination ratio is given by
obtain
N=
log10 (1 / k1 ) log10 (15.841979)
=
= 3.503885. We choose N = 4.
log10 (1 / k )
log10 (2.2)
2N
⎛Ωp ⎞
⎟
= ε 2 . Substituting the values of
From Eq. (4.33) we have ⎜⎜
⎟
⎝ Ωc ⎠
Ω c = 1.3007568(Ω p ) = 1.021612.
p,
N, and
2
we get
Using the statement [z,p,k] = buttap(4) we get the poles of the 4-th order
Butterworth analog filter with a 3-dB cutoff at 1 rad/s as p1 = −0.3827 + j 0.9239,
p2 = −0.3827 − j 0.9239, p3 = −0.9239 + j 0.3827, and p 4 = −0.9239 − j 0.3827.
Therefore,
Not for sale
298
H an (s ) =
1
1
=
.
(s − p1 )(s − p 2 )(s − p3 )(s − p 4 ) (s 2 + 0.7654s + 1)(s 2 + 1.8478s + 1)
Next we expand H an (s ) in a partial-fraction expansion using the M-file residue and
arrive at H an (s ) =
− 0.9238729 s − 0.7071323
+
0.9238729 s + 1.7071323
. We next
s 2 + 0.7654 s + 1
s 2 + 1.8478s + 1
denormalize H an (s ) to move the 3-dB cutoff frequency to c 1.021612 using the M-file
s
⎛
⎞
⎟
lp2lp resulting in H a ( s ) = H an ⎜
⎝ 1.021612 ⎠
0.943847s + 1.78174665
− 0.943847s − 0.738039
+
=
s 2 + 0.781947948s + 1.0437074244 s 2 + 1.887749436s + 1.0437074244
− 0.943847 s − 0.738039
0.943847s + 1.78174665
=
+
(s + 0.390974 ) 2 + (0.9438467) 2 (s + 0.94387471) 2 + (0.39090656 ) 2
Making use of the M-file bilinear we finally arrive at
G( z) =
− 0.943847 z 2 + 0.68178386 z
z 2 − 1.363567724 z + 0.4575139
9.15 The mapping is given by s =
s = σ o + jΩ o , z =
1
T
+
0.943847 z 2 − 0.25640047 z
z 2 − 0.77823439 z + 0.1514122
(1 − z −1 ) or equivalently, by z =
.
1
. For
1 − sT
1
1
2
. Therefore, z =
. Hence,
1 − σ o T − jΩ o T
(1 − σ o T ) 2 + (Ω o T ) 2
z < 1 for o
0. As a result, a stable H a (s ) results in a stable H (z ) after the
1
2
which is equal to 1 only for
transformation. However, for σ o = 0, z =
1 + (Ω o T ) 2
Ω o = 0. Hence, only the point Ω o = 0 on the jΩ -axis in the s -plane is mapped onto the
point z = 1 on the unit circle. Consequently, this mapping is not useful for the design of
digital filters via analog filter transformation.
9.16 For no aliasing T ≤
H1 (z)
π
. Figure below shows the magnitude responses of the digital filters
Ωc
and H 2 (z) .
j
H 2 (e j )
H1(e )
2
1
–š
0
š
Not for sale
–š
0
š
299
(a) The magnitude responses of the digital filters G1 ( z) and G2 ( z) are shown below:
G2 (e j )
G1(e j )
3/2
1
–š
0
š
–š
0
š
(b) As can be seen from the above G1 ( z) is a multi-band filter, whereas, G2 ( z) is a
highpass filter.
9.17 H a (s ) is causal and stable and H a (s )
s, Now, G( z) = H a (s ) s = 2 ⎛⎜ 1− z −1 ⎞⎟ . Thus,
1,
T ⎜ 1− z −1 ⎟
⎝
⎠
G (z ) is causal and stable. Now,
G ( e jω ) = H a ( s )
=
2 ⎛ 1− e jω ⎞⎟
s= ⎜
T ⎜ 1+ e jω ⎟
⎝
H a (s ) s = j 2 tan(ω / 2) = H a ( j
T
2
T
tan(ω / 2).
⎠
Therefore, G(e jω ) = H a ( j tan(ω / 2) ≤ 1 for all values of . Hence, G (z ) is a BR
T
2
function.
9.18 G ( z ) =
1+ α
1 − 2 βz − 1 + z − 2
. For β = cos ωo , the numerator of G (z ) becomes
⋅
2 1 − β (1 + α ) z −1 + αz − 2
1
2
j
1
j 0 1
z )
1 2cos 0 z
z
(1 e 0 z )(1 e
numerator of G(z N ) is then given by (1 e j
N
j
0z
N
which has roots at z
)(1 e
j 0 N
z )
e j
0.
The
whose roots are
j(2 n
)/ N
0
e
, and are given by z e
,
obtained by solving the equation z
N
0 n N 1. Hence G(z ) has N complex conjugate zero-pairs located on the unit
2 n
0 radians, 0 n N 1.
circle at angles of
N
0
0
/ 2, there are 2N equally spaced zeros on the unit circle starting at
9.19 (a) H ( z ) =
1
[1 +
2
/ 2N.
z −2 D1 ( z −1 ) z −2 D2 ( z −1 )
N ( z)
. We can write A4 ( z ) =
⋅
, where
A4 ( z )] =
D( z )
D1 ( z )
D2 ( z )
D1 ( z ) = 1 − β1 (1 + α1 )z −1 + α1 z −2 and D2 ( z ) = 1 − β2 (1 + α 2 )z −1 + α 2 z −2 . Therefore,
N ( z) =
1
2
[D (z)D (z) + z
1
2
−4
]
D1 ( z −1 ) D2 ( z −1 ) . Now,
Not for sale
300
z − 4 N ( z −1 ) =
1
2
[z
−4
]
D1 ( z −1 ) D2 ( z −1 ) + D1 ( z ) D2 ( z ) = N ( z ). Hence, N ( z ) is a symmetric
polynomial. It follows then
P( z) =
1
2
[(α1 − β1 (1 + α1 )z −1 + z − 2 )(α2 − β2 (1 + α2 )z −1 + z − 2 )
)(
(
+ 1 − β1 (1 + α1 )z −1 + α1 z − 2 1 − β2 (1 + α 2 )z −1 + zα 2 − 2
=
)]
1 + α 1α 2
[1 − (1 + α1 )(1 + α 2 )(β1 + β2 ) z −1 + 2[α1 + α 2 + β1β 2 (1 + α1 )(1 + α 2 )] z − 2
2
1 + α 1α 2
1 + α 1α 2
(1 + α1 )(1 + α 2 )(β1 + β 2 ) − 3
−
z + z − 4 ] = a(1 + b1 z −1 + b2 z −2 + b1 z −3 + z −3 ),
1 + α1α 2
(1 + α1 )(1 + α 2 )( β1 + β2 )
,
1 + α1α 2
2[α1 + α2 + β1 β2 (1 + α1 )(1 + α2 )]
,
b2 =
1 + α1α2
b1 = −
where
(b) a =
(7-a)
(7-b)
1 + α 1α 2
.
2
(7-c)
(c) for z = e jω , we can write N (e jω ) = a(1 + b1e − jω + b2 e − j 2ω + b1e − j 3ω + e − j 4ω )
= ae − j 2ω (b2 + 2b1 cos ω + 2 cos 2ω). Now, N (e jω ) = 0 for i = 1, 2. For i = 1, we get
b2 + 2b1 cos ω1 + 2 cos 2ω1 = 0,
(7-d)
for i = 2, we get
b2 + 2b1 cos ω2 + 2 cos 2ω2 = 0,
(7-e)
Solving Eqs. (7-d) and (7-e) we get b1 = −2(cos ω1 + cos ω2 )
b2 = 2(2 cos ω1 cos ω2 + 1).
and
(7-f)
(7-g)
(1 + α1 )(1 + α 2 )(β1 + β1 )
= 2(cos ω1 + cos ω2 ),
(7-h)
1 + α 1α 2
and from Eqs. (7-b) and (7-g) we have
2[α1 + α 2 + β1β 2 (1 + α1 )(1 + α 2 )]
= 2(2 cos ω1 cos ω2 + 1).
(7-i)
1 + α1α 2
1 − tan( B2 / 2)
1 − tan( B1 / 2)
, and after rearrangement we get
Substituting α1 =
and α 2 =
1 + tan( B2 / 2)
1 + tan( B1 / 2)
β + β = (cos ω + cos ω )[1 + tan( B / 2) tan( B / 2)] ∆ θ ,
(7-j)
From Eqs. (7-a) and (7-f) we have
1
2
1
2
Not for sale
1
2
= 1
301
β1β 2 = [1 + tan( B1 / 2) tan( B2 / 2)] cos ω1 cos ω2 ∆
= θ2 .
and
(7-k)
The above two nonlinear equations can be solved yielding
1
2
1
4 2
and 2
2.
2
1
(d) For the double notch filter with the following specifications: ω1 = 0.2π ,
ω2 = 0.6π , B1 = 0.2π, and B2 = 0.25π we get the following values for the
parameters of the notch filter transfer function:
α1 = 0.5095, α 2 = 0.4142, θ1 = 0.5673, θ 2 = −0.1491, β1 = 0.7628, and
1
β 2 = −0.1955 . H (z ) =
1
2
[1 + A4 (z )] :
1
2
Phase, radians
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
1
0
-1
-2
0
ω/ π
0.2
0.4
0.6
0.8
1
ω/ π
9.20 A zero (pole) of H LP (z) is given by the factor ( z − z k ). After applying the lowpass-tozˆ − α
− z k , and hence the new location of the
lowpass transformation, this factor becomes
1 − α zˆ
zero (pole) is given by the roots of the equation
α + zk
. For z k = −1,
zˆ − α − z k + α z k zˆ = (1 + α z k )zˆ − (α + z k ) = 0 or zˆ k =
1 + αzk
a −1
zˆ k =
= − 1.
1− a
9.21 The lowpass-to-bandpass transformation is given by z
b a ˆz zˆ 2
where a
1 a zˆ b zˆ 2
2
1
and
1
. A zero (pole) of H LP (z) is given by the factor ( z − z k ). . After applying the
1
b azˆ zˆ 2
zk , and hence, the
lowpass-to-bandpass transformation, this factor becomes
1 a zˆ b zˆ 2
b
new location of the zero (pole) of the bandpass transfer function is given by the roots of the
Not for sale
302
a(1 z k )
b zk
z
1 b zk
1 b zk
equation (1 b zk ) z2 a(1 zk ) z (b zk ) 0, or z 2
a(1 z k )
2(1 b z k )
solution is given by zˆ k
(
0.3404 1 + z −1
9.22 G LP (z ) =
a(1 z k )
2(1 b z k )
2
0, whose
b zk
. For z k
1 bz k
1, zˆ k
)2
, with ωc = 0.55π.
1 + 0.1842 z −1 + 0.1776 z −2
ˆ c = 0.42 π
H LP (z ) for ω
0.55π ⎞
0.42 π ⎞
0.55π − 0.42 π ⎞
tan⎛⎜
⎟ sin⎛⎜
⎟ − tan⎛⎜
⎟
2
⎝ 2 ⎠=
⎝ 2 ⎠
⎠ = 0.2030
⎝
α=
0
.
55
0
.
42
0
.
55
0
.
42
π
π
π
+
π
⎞⎟ sin⎛⎜
⎞⎟ + tan⎛⎜
⎞⎟
tan⎛⎜
2
⎝ 2 ⎠
⎝ 2 ⎠
⎝
⎠
H LP (z ) = G LP (z ) z −1 = zˆ −1 − α =
1− αzˆ −1
=
⎛ zˆ −1 − α ⎞
⎟
0.3404⎜⎜ 1+
−1 ⎟
ˆ
1
−
α
z
⎝
⎠
2
⎛ −1 ⎞
⎛ zˆ −1 − α ⎞
⎟⎟ + 0.1776⎜⎜ zˆ − α ⎟⎟
1 + 0.1842⎜⎜
⎝ 1− αzˆ −1 ⎠
⎝ 1− αzˆ −1 ⎠
0.21623 + 0.43245zˆ −1 + 0.21623zˆ −2
0.96993 − 0.2863zˆ −1 + 0.181416zˆ − 2
2
.
Gain Responses
0
GLP(z)
Gain in dB
-10
HLP(z)
-20
-30
-40
-50
9.23
0
0.2
0.4
0.6
0.8
1
0.55π + 0.47π ⎞
− cos⎛⎜
⎟
2
⎝
⎠ = 0.0317.
α=
0.55π − 0.47π ⎞
cos⎛⎜
⎟
2
⎝
⎠
H HP (z ) = G LP (z ) z −1 = −⎛⎜ zˆ −1 + α ⎞⎟ =
⎜ 1+ αzˆ −1 ⎟
⎠
⎝
0.3192 − 0.6383zˆ −1 + 0.3192 zˆ −2
0.9943 − 0.1097 zˆ −1 + 0.1728zˆ − 2
Not for sale
.
303
1.
Gain Responses
0
Gain, dB
-10
HHP(z)
-20
GLP(z)
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω /π
ˆ c2 − ω
ˆ c1 , and α = cos(ω
ˆ c ) = 0.2790
9.24 ωc = ω
⎛ zˆ −1 − α ⎞ 0.2790 zˆ −1 − zˆ − 2
−1
−
1
⎟=
z = − zˆ ⎜
.
⎜ 1 − αzˆ −1 ⎟
1 − 0.2790 zˆ −1
⎝
⎠
0.6918 − 0.1968zˆ −1 − 0.6234 zˆ −2 − 0.1968zˆ −3 + 0.6918zˆ −4
H BP (z ) =
.
3.5588 − 2.6824 zˆ −1 + 3.046 zˆ −2 − 1.2546 zˆ −3 + zˆ −4
Gain Responses
0
HBP(z)
Gain, dB
-10
GLP(z)
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω /π
⎛ 0.52 π − 0.45π ⎞
sin⎜
⎟
2
⎝
⎠ = 0.1099.
ˆ p = 0.45π, and ω p = 0.52π. λ =
9.25 ω
⎛ 0.52π + 0.45π ⎞
sin⎜
⎟
2
⎝
⎠
2.873 − 5.622 zˆ −1 + 5.629zˆ −2 − 2.874 zˆ −3
.
H HP (z ) = G HP (z ) z = zˆ −1 −0.1099 =
−1
− 2 ˆ −3
−
1
ˆ
ˆ
−
z
+
z
+
z
9
.
7623
1
.
5359
6
.
711
1−0.1099 zˆ
Not for sale
304
Gain Responses
0
HHP(z)
Gain in dB
-10
GHP(z)
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω /π
⎛
1 − z −2
9.26 Eq. (7.79): H BP (z ) = 0.136728736⎜
⎜ 1 − 0.53353098z −1 + 0.726542528z −2
⎝
⎛ 0.5π − 0.4π ⎞
sin⎜
⎟
2
⎝
⎠ = −0.1584
ˆ 0 = 0.5π, and ω0 = 0.4 π. λ =
ω
⎛ 0.5π + 0.4π ⎞
sin ⎜
⎟
2
⎝
⎠
G BP (z ) = H BP (z ) z −1= zˆ −1 + 0.1584 =
1+ 0.1584
zˆ −1
0.1333 − 0.1333zˆ −2
0.933718 + 0.667122 zˆ −2
⎞
⎟.
⎟
⎠
.
Gain Responses
0
GBP(z)
HBP(z)
Gain in dB
-10
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω /π
B
1 − tan⎛⎜ ω ⎞⎟
⎛ 80 ⎞
⎛ 5 ⎞
⎝ 2 ⎠ = 0.9244
9.27 ω0 = 2 π⎜
⎟ = 0.4 π , Bω = 2 π⎜
⎟ = 0.025π. α =
B
⎝ 400 ⎠
⎝ 400 ⎠
1 + tan⎛⎜ ω ⎞⎟
⎝ 2 ⎠
β = cos(ω0 ) = 0.3090.
G (z ) =
=
1
2
(1 + α ) − 2β(1 + α )z −1 + (1 + α )z − 2
1 − β(1 + α )z −1 + αz − 2
0.9622 − 0.59465z
1 − 0.5946 z
−1
−1
+ 0.9622 z
+ 0.9244 z − 2
=
(
0.5 1.9244 − 1.1893 z −1 + 1.9244 z − 2
1 − 0.5946 z
−1
+ 0.9244 z
−2
)
−2
.
Not for sale
305
ˆ
ω −ω
sin⎛⎜ 0 0 ⎞⎟
⎝ 2 ⎠ = 0.2738.
α=
ˆ
ω +ω
sin⎛⎜ 0 0 ⎞⎟
⎝ 2 ⎠
50 ⎞
ˆ 0 = ⎛⎜
ω
⎟2 π = 0.25π.
⎝ 400 ⎠
H BS (z ) = G BS (z ) z −1 = zˆ −1 −α =
1.0301 − 1.45679zˆ −1 + 1.0301zˆ −2
1.06017 − 1.45674zˆ −1 + zˆ − 2
1− αzˆ −1
.
Gain Responses
0
HBS(z)
Gain in dB
-10
GBS(z)
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω /π
ˆ p = 0.45π and ω p = 0.52π.
9.28 ω
G HP (z ) =
(
0.2397 1 − 1.5858z −1 + 1.5858z −2 − z −3
1 + 0.3272 z −1 + 0.7459z −2 + 0.179z −3
⎛ ω p + ωˆ p ⎞
− cos⎜
⎟
2
⎝
⎠ = −0.0474.
α=
ˆ
ω
−
ω
⎛ p p⎞
cos⎜
⎟
⎝ 2 ⎠
H LP (z ) = G HP (z )
− zˆ −1 − α
z −1 =
1+ αzˆ −1
=
)
− 1.03399 − 1.45578zˆ −1 − 1.45578zˆ −2 − 1.03399zˆ −3
− 4.72684 + 2.52265zˆ −1 − 3.7756zˆ − 2 + zˆ −3
Gain Responses
0
HLP(z)
Gain, dB
-10
GHP(z)
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω /π
9.29 D = 6.9231 , hence, N = 6. A(z ) =
( )
z −6 D z −1
.
D (z )
Not for sale
306
Group delay
6
0.75
5.5
Delay, in radians
Magnitude
Magnitude response
0.8
0.7
0.65
0.6
0.55
5
4.5
4
3.5
0
0.2
0.4
0.6
0.8
3
1
0
0.2
0.4
ω/ π
9.30
0.6
0.8
1
ω/ π
From Eq. (2.141) y(nT ) = y((n − 1)T ) +
nT
∫ x(τ)dτ =y((n − 1)T ) + T ⋅ x((n − 1)T ), which
( n −1)T
reduces to y[ n] = y[ n − 1] + T ⋅ x[ n − 1]. Hence, the corresponding transfer function is
given by H R ( z ) =
Tz −1
1 − z −1
. From Eq. (2.120) y[ n] = y[ n − 1] +
T
(x[ n] + x[ n − 1]) .
2
T 1 + z −1
. From the
Hence, the corresponding transfer function is given by H T ( z) = ⋅
2 1 − z −1
plot given below it can be seen that the magnitude response of H int (z) lies between that
of H R ( z) and H T (z) .
Magnitude
1.5
1
HR(z)
0.5
Hint(z)
HT(z)
0
0.2
0.4
0.6
0.8
1
ω/ π
3
1
9.31 H N ( z ) = H R ( z ) + H T ( z ). From the plot given below it can be seen that the magnitude
4
4
response of H N (z) lies between that of H R (z) and H T (z) , and is much closer to that of
H int ( z) .
Not for sale
307
Magnitude
1.5
1
HR(z)
0.5
HN(z)
HT(z)
0
0.2
0.4
Hint(z)
0.6
0.8
1
ω/π
3 ⎛ z −1
⎞
1 ⎛ 1+ z −1 ⎞
8(1− z −1 )
1+ 7 z −1
⎟+ ⎜
,
⎟=
9.32 H N ( z ) = ⎜⎜
. Its inverse is given by H ( z ) =
4 ⎝ 1 − z −1 ⎟⎠ 8 ⎜⎝ 1− z −1 ⎟⎠ 8(1 − z −1 )
1+ 7 z −1
which is unstable as it has a pole at z = −7. A stable transfer function with the same
magnitude response is obtained by multiplying H (z ) with an allpass function
resulting in H IIR ( z) =
8(1− z −1 ) 1+ 7 z −1
⋅
1+ 7 z −1 7 + z −1
=
8(1− z −1 )
7 + z −1
1+ 7 z −1
7 + z −1
. A plot of the ideal differentiator
H DIF (z) with a frequency response given by Eq. (7.68) and that of the IIR differentiator
H IIR (z) is given below. As can be seen the magnitude response of H IIR (z) is very close
to that H DIF (z) .
3
HIIR(z)→
Magnitude
2.5
2
HDIF(z)
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
ω/π
M9.1 FT = 100 kHz, α p = 0.4 dB, Fp = 10 kHz, α s = 50 dB, & Fs = 30 kHz ,
ωp =
2 πF p
FT
= 0.628, ωs =
2 πFs
= 1.885.
FT
⎛ ωp
Let T = 2. Ω p = tan⎜⎜
⎝ 2
⎞
ω
⎟ = 1.376, and Ω s = tan⎛⎜ s ⎞⎟ = 1.376. Therefore,
⎟
⎝ 2 ⎠
⎠
⎛ 1 ⎞
1 Ωs
⎟ = −0.4. Hence, ε 2 = 0.096.
= 4.235. Now, 20 log10 ⎜
=
⎜
2 ⎟
k Ωp
⎝ 1+ ε ⎠
Not for sale
308
⎛1⎞
From 20 log10 ⎜ ⎟ = −50 we obtain A 2 = 100,000. Therefore,
⎝ A⎠
1
k1 = 9.798 × 10 −4 , or
= 1020.62. As a result,
k1
log10 (1 / k1 )
N=
= 4.80 → 5. Next, solving
log10 (1 / k )
⎛ Ωs
⎜⎜
⎝ Ωc
10
⎞
⎟⎟
⎠
= A 2 − 1 = 99,999 we get
Ωs
Ωc =
= 0.316Ω s = 0.435
99,9991 / 10
Using the M-file buttap, we determine the normalized analog Butterworth
transfer function of 5th order with a 3-dB cutoff frequency at Ω c = 1 , which is:
1
.
H an (s ) =
2
(s + 1) s + 0.618s + 1 s 2 + 1.618s + 1
Denormalize H an (s ) to move Ω c to 0.316:
1
s ⎞
H a (s ) = H an ⎛⎜
⎟=
⎝ 0.435 ⎠ (2.30s + 1)(5.28s 2 + 1.42s + 1)(5.28s 2 + 3.72s + 1)
(
=
)(
)
1
1 + 7.44s + 27.66s 2 + 63.58s 3 + 90.30s 4 + 64.12s 5
.
G (z ) = H a (s ) s = 2 ⎛⎜ 1− z −1 ⎞⎟
T ⎜ 1+ z −1 ⎟
⎝
⎠
=
0.0039 + 0.0197z −1 + 0.0394 z −2 + 0.0394z −3 + 0.0197z −4 + 0.0039z −5
1 − 2.3617z −1 + 2.6139z − 2 − 1.5492 z −3 + 0.4865z − 4 − 0.0637z − 5
.
Matlab code is as follows:
% Program M9.01
N = 5;
[z, p, k] = buttap(N);
[num, den] = zp2tf(z, p, k);
% s -> s/0.435
den = [64.12 90.30 63.58 27.66 7.44 1];
num = [0 0 0 0 0 1];
% compute z, p, and k
[z, p, k] = tf2zp(num, den);
% perform bilinear transformation with T = 2;
[zd, pd, kd] = bilinear(z, p, k, 1/2);
% get the digital transfer function
[n2, d2] = zp2tf(zd, pd, kd);
% get the frequency response
[h, w] = freqz(n2, d2, 512);
figure(1);
plot(w/pi, 20*log10(abs(h))); grid;
axis([0 1 -60 5]);
xlabel('\omega/\pi'); ylabel('Gain, dB');
Not for sale
309
title('Gain response');
figure(2);
plot(w/pi, unwrap(angle(h))); grid;
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, radians');
title('Phase response');
Gain response
Phase response
0
0
Phase, radians
Gain, dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
-2
-4
-6
-8
ω/ π
0
0.2
0.4
0.6
0.8
1
ω/ π
M9.2 % Problem M9.02
Fp = input('Passband edge frequency in Hz = ');
Fs = input('Stopband edge frequency in Hz = ');
FT = input('Sampling frequency in Hz = ');
Rp = input('Passband ripple in dB = ');
Rs = input('Stopband minimum attenuation in dB = ');
Wp = 2*Fp/FT;
Ws = 2*Fs/FT;
[N, Wn] = buttord(Wp, Ws, Rp, Rs)
[b, a] = butter(N, Wn);
disp('Numerator polynomial');
disp(b)
disp('Denominator polynomial');
disp(a)
[h, w] = freqz(b, a, 512);
plot(w/pi, 20*log10(abs(h))); grid
axis([0 1 -60 5]);
xlabel('\omega/\pi'); ylabel('Magnitude, dB');
pause
plot(w/pi, unwrap(angle(h))); grid
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, radians');
M9.3 % Program #M9.03
close all;
clear;
clc;
% (a.) Ft = 1Hz;
[B, A] = besself(5, 0.5);
Not for sale
310
[BZ,AZ] = impinvar(B,A,1);
[h, w] = freqz(BZ, AZ, 512);
[Gd,W] = grpdelay(BZ,AZ,512);
figure(1);
plot(w/pi, 20*log10(abs(h)));
title('Gain response, , Sampling rate = 1 Hz');
xlabel('\omega/\pi'); ylabel('Gain, in dB');
figure(2);
plot(W/pi, (Gd));
title('Group delay, Sampling rate = 1 Hz');
xlabel('\omega/\pi'); ylabel('Delay, in samples');
% (b.) Ft = 2Hz;
[B, A] = besself(5, 0.5);
[BZ,AZ] = impinvar(B,A,2);
[h, w] = freqz(BZ, AZ, 512);
[Gd,W] = grpdelay(BZ,AZ,512);
figure(3);
plot(w/pi, 20*log10(abs(h)));
title('Gain response, Sampling rate = 2 Hz');
xlabel('\omega/\pi');ylabel('gain response');
figure(4);
plot(W/pi, (Gd));
title('Group delay, Sampling rate = 2 Hz');
xlabel('\omega/\pi'); ylabel('Delay, in samples');
(a) FT = 1 Hz
Group delay, Sampling rate = 1 Hz
8
0
6
Delay, in samples
Gain, in dB
Gain response, Sampling rate = 1 Hz
20
-20
-40
-60
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
4
2
0
-2
-4
0
0.2
0.4
0.6
0.8
1
ω/ π
(b) FT = 2 Hz
Not for sale
311
Group delay, Sampling rate = 2 Hz
20
0
15
Delay, in samples
Gain, in dB
Gain response, Sampling rate = 2 Hz
20
-20
-40
-60
10
5
0
-80
0
0.2
0.4
0.6
0.8
-5
1
0
0.2
0.4
ω/ π
M9.4 ω p = 0.628, ω s = 1.885.
(
0.6
0.8
1
ω/ π
)
(
)
20 log10 G e 0.628 j ≥ −0.4, 20 log10 G e1.885 j ≤ −50.
Impulse invariance method, let T = 1 and assume no aliasing. Then
⎛ 1 ⎞
⎟ = −0.4 ⇒ ε 2 = 0.096 ,
20 log10 ⎜⎜
⎟
2
⎝ 1+ε ⎠
⎛1⎞
20 log10 ⎜ ⎟ = −50 ⇒ A 2 = 100,000 .
⎝ A⎠
A2 − 1
1
=
k1
= 1020.62 ,
ε2
⎛1⎞
log10 ⎜ ⎟
⎝ k1 ⎠ = 6.3 → 7
N=
1
log10 ⎛⎜ ⎞⎟
⎝k⎠
⎛ Ωs
⎜⎜
⎝ Ωc
1 1.885
=
= 3 . Hence,
k 0.628
10
⎞
⎟⎟
⎠
= A 2 − 1 = 99,999 or Ω c =
Ωs
(A − 1)
2
1 / 10
= 0.596 .
Using the M-file butter, we get the analog Butterworth transfer function H a (s )
of 7th order with a 3-dB cutoff frequency at Ω c .
H a (s ) is then transformed into a digital transfer function using the M-file
impinvar, which yields:
G (z ) =
0.001z −2 + 0.0034 z −3 + 0.0023z −4 + 0.0003z −5
1 − 4.38z −1 + 8.54 z −2 − 9.55z −3 + 6.57z −4 − 2.77z −5 + 0.66 z −6 − 0.07z −7
% Problem M9.04
[B, A] = butter(7, 0.596, 's');
[num, den] = impinvar(B, A, 1);
Not for sale
312
.
% get the frequency response
[h, w] = freqz(num, den, 512);
plot(w/pi, 20*log10(abs(h))); grid;
axis([0 1 -60 5]);
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Gain response');
Gain response
0
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
ω/ π
M9.5 FT = 100 kHz, Fp = 10 kHz, Fs = 30 kHz, α p = 0.4 dB, α s = 50 dB
ωp =
2 πFp
FT
2πFs
= 0.6 π.
FT
= 0.2 π, and . ω s =
(
)
(
)
20 log10 G e 0.628 j ≥ −0.4, 20 log10 G e1.885 j ≤ −50.
Impulse invariance method:
Let T = 1 and assume no aliasing. In this case, the specifications for H a (s ) are
same as that for G (z ), i.e.,
Ω p = 0.628, Ω s = 1.885,
20 log10 H a (0.628 j ) ≥ −0.4, 20 log10 H a (1.885 j ) ≤ −50.
⎛ 1 ⎞
⎟ = −0.4 ⇒ ε 2 = 0.096 , and
Now, 20 log10 ⎜⎜
⎟
2
⎝ 1+ε ⎠
1
20 log10 ⎛⎜ ⎞⎟ = −50 ⇒ A 2 = 100,000 . Hence,
⎝ A⎠
1
=
k1
A2 − 1
ε
2
= 1020.62 and
1 1.885
=
= 3.
k 0.628
Order of the Type I Chebyshev filter is N =
cosh −1 (1 / k1 )
cosh −1 (1 / k )
= 4.324 → 5
Bilinear transformation method:
Let T = 2. Ω p = 0.325, Ω s = 1.376 . Here,
Not for sale
1 Ωs
=
= 4.235 , and
k Ωp
313
ε 2 = 0.096, A 2 = 100,000 . Thus,
1
= 1020.62 .
k1
Order of the Type I Chebyshev filter is N =
cosh −1 (1 / k1 )
= 3.59 → 4.
cosh −1 (1 / k )
Both designs meet the specifications, while the bilinear transformation method
meets with a filter of lower order. MATLAB code is as follows:
% Problem #M9.05
% Impulse invariance method
[z, p, k] = cheb1ap(5, 0.4);
[B, A] = zp2tf(z, p, k);
[BT, AT] = lp2lp(B, A, 0.628);
[num, den] = impinvar(BT, AT, 1);
[h, w] = freqz(num, den, 512);
figure(1);
plot(w/pi, 20*log10(abs(h))); grid;
axis([0 1 -60 5]);
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Impulse Invariance Method');
figure(2);
plot(w/pi, unwrap(angle(h))); grid
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, in radians');
title('Impulse Invariance Method');
% Bilinear transformation method
[z, p, k] = cheb1ap(4, 0.4);
[B, A] = zp2tf(z, p, k);
[BT, AT] = lp2lp(B, A, 0.325);
[num, den] = bilinear(BT, AT, 0.5);
[h, w] = freqz(num, den, 512);
figure(3);
plot(w/pi, 20*log10(abs(h))); grid;
axis([0 1 -60 5]);
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Bilinear Transformation Method');
figure(4);
plot(w/pi, unwrap(angle(h))); grid
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, in radians');
title('Bilinear Transformation Method');
Impulse Invariance Method:
Not for sale
314
Impulse Invariance Method
Impulse Invariance Method
0
0
Phase, in radians
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
-2
-4
-6
-8
1
0
0.2
0.4
ω/ π
0.6
0.8
1
ω/ π
Bilinear Transformation Method:
Bilinear Transformation Method
Bilinear Transformation Method
0
0
Phase, in radians
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
-2
-4
-6
-8
0
0.2
0.4
0.6
0.8
1
ω/ π
ω/ π
M9.6 % Problem M9.06
Wp = input('Normalized passband edge = ');
Ws = input('Normalized stopband edge = ');
Rp = input('Passband ripple in dB = ');
Rs = input('Minimum stopband attenuation in dB = ');
[N, Wn] = cheb1ord(Wp, Ws, Rp, Rs);
[b, a] = cheby1(N, Rp, Wn);
[h, omega] = freqz(b,a,256);
figure(1);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Type I Chebyshev Filter');
axis([0 1 -60 5]);
figure(2);
plot(omega/pi, unwrap(angle(h))); grid
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, in radians');
title('Type I Chebyshev Filter');
Not for sale
315
Type I Chebyshev Filter
Type I Chebyshev Filter
0
0
Phase, in radians
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
-2
-4
-6
-8
1
0
0.2
0.4
ω/π
0.6
0.8
1
ω/π
M9.7 % Problem M9.07
Wp = input(' Passband edge in radians = ');
Ws = input(' Stopband edge in radians = ');
Rp = input('Passband ripple in dB = ');
Rs = input('Stopband minimum attenuation in dB = ');
[N, Wn] = cheb1ord(Wp,Ws,Rp,Rs, 's');
[B, A] = cheby1(N, 0.5, Wn, 's');
[num, den] = impinvar(B, A, 1);
[h, omega] = freqz(num,den,256);
figure(1);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Type I Chebyshev Filter');
axis([0 1 -60 5]);
figure(2);
plot(omega/pi, unwrap(angle(h))); grid
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, in radians');
title('Type I Chebyshev Filter');
Type I Chebyshev Filter
Type I Chebyshev Filter
0
0
Phase, in radians
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
-2
-4
-6
-8
ω/ π
0
0.2
0.4
0.6
0.8
1
ω/ π
M9.8 Impulse invariance method:
2 log10 (4 / k1 )
1 Ωs
1
, where
=
= 3.00,
= 1020.62. Hence, N ≈
log10 (1 / ρ )
k Ωp
k1
Not for sale
316
k ' = 1 − k 2 , ρ0 =
1 − k'
(
2 1 + k'
),
ρ = ρ0 + 2 ρ05 + 15 ρ09 + 150 ρ13
0 . In our case,
k ' = 0.943, ρ0 = 0.0073, ρ = 0.0073 . Hence, N ≈ 3.38 → 4
Bilinear transformation method:
1
1 Ω
= 1020.62.
Ω p = 0.325, Ω s = 1.376, = s = 4.235.
k Ωp
k1
k ' = 0.972, ρ0 = 0.0036 , ρ = 0.0036 . Hence, N ≈ 2.96 → 3
We note that the filter design using the impulse invariance method does not meet
the specifications due to aliasing. Increasing N from 4 to 6 will meet the
specifications.
% Problem M9_08
% Impulse Invariance Method
[z, p, k] = ellipap(4, 0.4, 50);
[B, A] = zp2tf(z, p, k);
[BT, AT] = lp2lp(B, A, 0.628);
[num, den] = impinvar(BT, AT, 1);
[h, omega] = freqz(num,den,256);
figure(1);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Impulse Invariance Method');
axis([0 1 -60 5]);
figure(2);
plot(omega/pi, unwrap(angle(h))); grid
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, in radians');
title('Impulse Invariance Method');
% Bilinear Transformation Method
[z, p, k] = ellipap(4, 0.4, 50);
[B, A] = zp2tf(z, p, k);
[BT, AT] = lp2lp(B, A, 0.325);
[num, den] = bilinear(BT, AT, 0.5);
[h, omega] = freqz(num,den,256);
figure(3);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Bilinear Transformation Method');
axis([0 1 -60 5]);
figure(4);
plot(omega/pi, unwrap(angle(h))); grid
axis([0 1 -8 1]);
xlabel('\omega/\pi'); ylabel('Phase, in radians');
Not for sale
317
title('Bilinear Transformation Method');
Impulse Invariance Method
Impulse Invariance Method
0
0
Phase, in radians
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
-2
-4
-6
-8
1
0
0.2
0.4
0.6
0.8
1
ω/ π
ω/ π
Bilinear Transformation Method
Bilinear Transformation Method
0
0
Phase, in radians
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
-2
-4
-6
-8
1
0
0.2
0.4
ω/ π
0.6
0.8
1
ω/ π
M9.9 % Program M9_09
Wp = input('Normalized passband edge = ');
Ws = input('Normalized stopband edge = ');
Rp = input('Passband ripple in dB = ');
Rs = input('Stopband ripple in dB = ');
[N, Wn] = ellipord(Wp, Ws, Rp, Rs);
[b, a] = ellip(N, Rp, Rs, Wn);
[h, omega] = freqz(b, a, 256);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('IIR Elliptic Lowpass Filter');
axis([0 1 -60 5]);
IIR Elliptic Lowpass Filter
0
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
ω/π
M9.10 FT = 1.5 MHz, Fp = 600 kHz, Fs = 210 kHz.
Not for sale
318
. α p = 0.4 dB, α s = 45 dB
(a) ω p =
2 πF p
FT
= 2.513, ωs =
2πFs
= 0.880.
FF
ˆ = tan⎛⎜ ωp ⎞⎟ = 3.076, Ω
ˆ = tan⎛⎜ ωs ⎞⎟ = 0.471.
Ω
p
s
⎝ 2⎠
⎝ 2 ⎠
Analog highpass specifications are thus:
ˆ = 3.076, Ω
ˆ = 0.471, α = 0.4 dB, α = 45 dB
Ω
p
s
p
s
ˆ
Ω
p
(b) Ω p = 1, Ω s =
= 6.531
ˆ
Ω
s
% Problem M9.10
close all;
clear;
clc;
[N, Wn] = ellipord(1, 6.531, 0.4, 45, 's');
[B, A] = ellip(N, 0.4, 45, Wn, 's');
[BT, AT] = lp2hp(B, A, 3.076);
[num, den] = bilinear(BT, AT, 0.5);
[h, omega] = freqz(num, den, 256);
figure(1);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Elliptic Highpass Filter');
axis([0 1 -60 5]);
Elliptic Highpass Filter
0
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
ω/ π
(c) Analog lowpass transfer function coefficient are obtained by displaying B and A:
H LP (s ) =
0.0556 s 2 + 0.8329
s 3 + 1.3314 s 2 + 1.6434 s + 0.8329
.
Analog highpass transfer function coefficient are obtained by displaying BT and AT:
Not for sale
319
H HP (s ) =
s 3 + 0.6315 s
s 3 + 6.0693 s 2 + 15.1254 s + 34.9438
.
Digital highpass transfer function coefficient are obtained by displaying num and
den:
: G HP ( z ) =
0.0286 − 0.0415 z −1 + 0.0415 z −2 − 0.0286 z −3
1 + 1.9407 z −1 + 1.5613 z − 2 + 0.4356 z − 3
.
M9.11 FT = 9kHz, Fp1 = 1.2kHz, Fp2 = 2.2kHz, Fs1 = 650 Hz, Fs 2 = 3kHz,
α p = 0.8dB, αs = 31dB
(a) ω p1 =
ωs 2 =
2 πF p1
FT
= 0.8378 , ω p 2 =
2 πF p2
FT
2πFs1
= 0.4538 , and
FT
2πFs 2
= 2.094 , with
FT
⎛ ω p1 ⎞
⎛ ω p2
ˆ
ˆ
⎜
⎜
⎟
,
=
=
Ω
tan
=
0
.
445
Ω
tan
p1
p2
⎜ 2 ⎟
⎜ 2
⎝
⎝
⎠
ˆ = tan⎛⎜ ωs 2 ⎞⎟ = 1.731 .
and Ω
s2
⎝ 2 ⎠
ˆ
ˆ
B =Ω
−Ω
= 0.521,
ω
= 1.536 , ω s1 =
p2
⎞
ˆ = tan⎛⎜ ωs1 ⎞⎟ = 0.231 ,
⎟ = 0.966 , Ω
s1
⎟
⎝ 2 ⎠
⎠
p1
ˆ2 =Ω
ˆ Ω
ˆ
ˆ ˆ
Ω
0
p1 p2 = 0.430 ≠ Ω s1Ω s 2 = 0.40
ˆ 2 −Ω
ˆ2
Ω
s1
0
Therefore, we choose to lower the stopband edge to: Ω s =
= 3.13
ˆ
Ω s1 ⋅ Bω
(b) The analog lowpass specifications are thus:
Ω p = 1 rad, Ω s = 3.13 rad, α p = 0.8 dB, α s = 31 dB.
% Problem M9.11
[N, Wn] = cheb1ord(1, 3.13, 0.8, 31, 's');
[B, A] = cheby1(N, 0.8, Wn, 's');
[BT, AT] = lp2bp(B, A, sqrt(0.43), 0.521);
[num, den] = bilinear(BT, AT, 0.5);
[h, omega] = freqz(num, den, 256);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain,in dB');
title('Chebyshev I Bandpass Filter');
axis([0 1 -60 5]);
Not for sale
320
Chebyshev I Bandpass Filter
0
Gain,in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
ω/π
(c) Analog lowpass transfer function coefficient are obtained by displaying B and A:
0.5559
H LP (s ) =
.
s 3 + 1.0719 s 2 + 1.3244 s + 0.5559
Analog bandpass transfer function coefficient are obtained by displaying BT and AT:
H BP (s ) =
0.0786 s 3
s 6 + 0.5584 s 5 + 1.6495 s 4 + 0.5589 s 3 + 0.7093 s 2 + 0.1033 s + 0.0795
.
Digital bandpass transfer function coefficient are obtained by displaying den and
num:
G BP ( z ) =
0.0169 − 0.0506 z −2 + 0.0506 z −4 − 0.0169 z −6
1 − 1.9799 z −1 + 3.3196 z − 2 − 3.1443 z − 3 + 2.6191 z − 4 + 1.1983 z − 5 + 0.476 z − 6
M9.12 FT = 8 kHz, Fp1 = 0.9 kHz, Fp2 = 2.1 kHz, Fs1 = 0.6 kHz, Fs 2 = 3 kHz,
α p = 1.5 dB, α s = 30 dB
(a) ω p1 =
ωs2 =
2πF p1
FT
= 0.707 , ω p 2 =
2πF p 2
FT
= 1.649 , ω s1 =
2πFs 2
= 2.356 , with
FT
ω
ω
ˆ = tan⎛⎜ p 2
ˆ = tan⎛⎜ p1 ⎞⎟ = 0.369 , Ω
Ω
p1
p
2
⎜ 2 ⎟
⎜ 2
⎠
⎝
⎝
ˆ = tan⎛⎜ ω s 2 ⎞⎟ = 2.414 .
and Ω
s2
⎝ 2 ⎠
ˆ −Ω
ˆ = 2.174
B =Ω
ω
2πFs1
= 0.471 , and
FT
s2
⎞
ˆ = tan⎛⎜ ω s1 ⎞⎟ = 0.240 ,
⎟⎟ = 1.081 , Ω
s1
⎝ 2 ⎠
⎠
s1
ˆ2 =Ω
ˆ Ω
ˆ = 0.399 ≠ Ω
ˆ Ω
ˆ = 0.579
Ω
0
p1
p2
s1
s2
Therefore, we choose to lower the passband:
Not for sale
321
.
ˆ ˆ
ˆ = Ω s 2 Ω s1 = 0.536
Ω
p1
ˆ
Ω
p2
The analog bandstop filter specifications are thus:
ˆ = 0.240 rad, Ω
ˆ = 2.414 rad,
ˆ = 0.536 rad, Ω
ˆ = 1.081 rad, Ω
Ω
s1
s2
p1
p2
α p = 1.5 dB, α s = 30 dB.
(b) Analog prototype LP filter:
ˆ ⋅B
Ω
ω
p1
= 3.995 rad, α p = 1.5 dB, α s = 30 dB.
Ω s = 1 rad, Ω p =
ˆ 2 −Ω
ˆ2
Ω
0
p1
% Problem M9.12
close all;
clear;
clc;
[N, Wn] = ellipord(3.995, 1, 1.5, 30, 's');
[B, A] = ellip(N, 1.5, 30, Wn, 's');
[BT, AT] = lp2bs(B, A, sqrt(0.579), 2.174);
[num, den] = bilinear(BT, AT, 0.5);
[h, omega] = freqz(num, den, 256);
plot(omega/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Elliptic Bandstop Filter');
axis([0 1 -60 5]);
Elliptic Bandstop Filter
0
Gain, in dB
-10
-20
-30
-40
-50
-60
0
0.2
0.4
0.6
0.8
1
ω/ π
(c) Analog lowpass transfer function coefficient are obtained by displaying B and A:
H LP (s ) =
0.0316 s 2 + 12.6706
s 2 + 3.6122 s + 15.059
.
Analog bandstop transfer function coefficients are obtained by displaying BT and
AT:
H BS (s ) =
0.8414 s 4 + 0.9843 s 2 + 0.2821
s 4 + 0.5215 s 3 + 1.4719 s 2 + 0.3019 s + 0.3352
Not for sale
.
322
Digital bandstop transfer function coefficients are obtained by displaying num
and den:
G BS ( z ) =
0.5806 − 0.6163 z −1 + 1.3145 z −2 − 0.6163 z −3 + 0.5806 z −4
1 − 0.8534 z −1 + 1.3959 z − 2 − 0.6115 z − 3 + 0.5464 z − 4
.
M9.13 % Program M9.13
close all;
clear;
clc;
Wp = 0.7; Ws = 0.5;
Rp = 1; Rs = 32;
[N,Wn] = cheb1ord(Wp,Ws,Rp,Rs);
[b,a] = cheby1(N,Rp,Wn,'high');
[h,omega] = freqz(b,a,256);
plot (omega/pi,20*log10(abs(h)));grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Type I Chebyshev Highpass Filter');
[GdH,w] = grpdelay(b,a,512);
plot(w/pi,GdH); grid
xlabel('\omega/\pi'); ylabel('Delay, in samples');
title('Original Filter Group Delay');
F = 0.7:0.001:1;
g = grpdelay(b,a,F,2);
% Equalize the passband
Gd = max(g)-g;
% Design the allpass delay equalizer
[num,den,tau] = iirgrpdelay(2*N, F, [0.7 1], Gd);
[GdA,w] = grpdelay(num,den,512);
plot(w/pi,GdH+GdA); grid
xlabel('\omega/\pi');ylabel('Delay, in samples');
title('Group Delay Equalized Filter');
Group Delay Equalized Filter
Delay, in samples
40
30
20
10
0
0
0.2
0.4
0.6
0.8
1
ω/ π
M9.14 % Program M9.14
close all;
clear;
Not for sale
323
clc;
Wp = [0.45 0.65]; Ws = [0.3 0.75];
Rp = 1; Rs = 40;
[N,Wn] = buttord(Wp, Ws, Rp, Rs);
[b,a] = butter(N,Wn);
[h,omega] = freqz(b,a,256);
gain = 20*log10(abs(h));
plot (omega/pi,gain);grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('IIR Butterworth Bandpass Filter');
[GdH,w] = grpdelay(b,a,512);
plot(w/pi,GdH); grid
xlabel('\omega/\pi'); ylabel('Delay, in samples');
title('Original Filter Group Delay');
F = 0.45:0.001:0.65;
g = grpdelay(b,a,F,2);
% Equalize the passband
Gd = max(g)-g;
% Design the allpass delay equalizer
[num,den,tau] = iirgrpdelay(2*N, F, [0.45 0.65], Gd);
[GdA,w] = grpdelay(num,den,512);
plot(w/pi,GdH+GdA); grid
xlabel('\omega/\pi');ylabel('Delay, in samples');
title('Group Delay Equalized Filter');
Group Delay Equalized Filter
Delay, in samples
60
50
40
30
20
10
0
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
324
Chapter 10
10.1
To compute the filter orders, we use Kaiser’s formula of Eq. (10.3), Bellanger’s formula
of Eq. (10.4), and Hermann’s formula of Eq. (10.5).
Filter #1:
(
)
− 20 log10 0.0224 ⋅ 0.00012 − 13
= 157.097 ≈ 158
14.6(0.14375π − 0.10625π ) / 2π
− 2 log10 (10 ⋅ 0.0224 ⋅ 0.000112 )
Bellanger’s formula - N =
− 1 = 162.575 ≈ 163
3(0.14375π − 0.10625π ) / 2π
Hermann’s formula 2
D∞ (δ p , δ s ) = 0.005309(log10 0.0224 ) + 0.07114(log10 0.0224 ) − 0.4761 ⋅ log10 0.000112 −
Kaiser’s formula - N =
[0.00266(log
[
]
]
0.0224 ) + 0.5941(log10 0.0224 ) + 0.4278 = 2.8326
F (δ p , δ s ) = 11.01217 + 0.51244[log 10 0.0224 − log 10 0.000112 ] = 12.1913
N=
2
10
2.8326 − 12.1913[(0.14375π − 0.10625π ) / 2π ]2
= 150.8434 ≈ 151
(0.14375π − 0.10625π ) / 2π
Filter #2:
(
)
− 20 log10 0.017 ⋅ 0.034 − 13
= 33.186 ≈ 34
14.6(0.2875π − 0.2075π ) / 2π
− 2 log10 (10 ⋅ 0.017 ⋅ 0.034 )
Bellanger’s formula - N =
− 1 = 36.3012 ≈ 37
3(0.2875π − 0.2075π ) / 2π
Hermann’s formula 2
D∞ (δ p , δ s ) = 0.005309(log10 0.017 ) + 0.07114(log10 0.017 ) − 0.4761 ⋅ log10 0.034 −
Kaiser’s formula - N =
[0.00266(log
[
]
]
0.017 ) + 0.5941(log10 0.017 ) + 0.4278 = 1.474777
F (δ p , δ s ) = 11.01217 + 0.51244[log 10 0.017 − log 10 0.034] = 10.85791019
N=
2
10
1.474777 − 10.85791019[(0.2875π − 0.2075π ) / 2π ]2
= 36.435 ≈ 37
(0.2875π − 0.2075π ) / 2π
Filter #3:
(
)
− 20 log10 0.0411 ⋅ 0.0137 − 13
= 11.6107 ≈ 12
14.6(0.575π − 0.345π ) / 2π
− 2 log10 (10 ⋅ 0.0411 ⋅ 0.0137 )
Bellanger’s formula - N =
− 1 = 12.04 ≈ 13
3(0.575π − 0.345π ) / 2π
Hermann’s formula Kaiser’s formula - N k =
Not for sale
324
[
]
D∞ (δ p , δ s ) = 0.005309(log10 0.0411) + 0.07114(log10 0.0411) − 0.4761 ⋅ log10 0.0137 −
[0.00266(log
2
]
0.0411) + 0.5941(log10 0.0411) + 0.4278 = 1.4424
F (δ p , δ s ) = 11.01217 + 0.51244[log 10 0.0411 − log 10 0.0137 ] = 11.256666
2
10
1.4424 − 11.256666[(0.575π − 0.345π ) / 2π ]2
N=
= 11.248 ≈ 12
(0.575π − 0.345π ) / 2π
10.2
N = 75 and ω s − ω p = 0.05π and we assume δ s = δ p .
(a) Using Kaiser’s formula of Eq. (10.3):
⎛ 75[14.6⋅0.05π / 2 π ]+13 ⎞
⎜
⎟
− 20
⎝
⎠
= 10
δs
= 0.009577 ∴ α s = 40.375 dB.
(b) Using Bellanger’s formula of Eq. (10.4):
1/ 2
⎛ − 76⋅3⋅0.05π / 2π ⎞ ⎞
⎛
⎜
⎟⎟
⎜
2
⎝
⎠
δ s = ⎜ 0.1 ⋅ 10
= 0.0119 ∴ α s = 38.5 dB.
⎟
⎟
⎜
⎠
⎝
(c) Using Hermann’s formula of Eq. (10.5):
2
F = b1 ∴ D∞ (δ s ) = N (ω s − ω p ) / 2π + b1 (ω s − ω p ) / 2π
[
[
]
]
D∞ (δ s ) = a1 (log10 δ s ) + a 2 (log10 δ s ) + a3 (log10 δ s ) −
[a (log
4
10
2
δ s )2 + a5 (log10 δ s ) + a6
]
D∞ (δ s ) = a1 (log10 δ s ) + a 2 (log10 δ s ) + a3 (log10 δ s ) −
3
2
a 4 (log10 δ s ) − a5 (log10 δ s ) − a 6
2
D∞ (δ s ) = a1 (log10 δ s ) + (a 2 − a 4 )(log10 δ s ) + (a3 − a5 )(log10 δ s ) − a 6
Let x = (log10 δ s ) , and thus
3
2
D∞ (δ s ) = 0.005309 x 3 + 0.06848 x 2 − 1.0702 x − 0.4278 = 1.875697
Solving for x gives us three possible solutions:
x = −21.3787 , x = −1.94654, x = 10.4263
The most reasonable solution is the second. Therefore,
δ s = 0.0113 ∴ α s = 38.93
10.3
N = 75 and ω s − ω p = 0.05π = ∆ω
α s = 2.285(∆ω )N + 8 = 34.9 dB.
10.4
The ideal L -band digital filter H ML (z) has a frequency response given by
H ML (e jω ) = Ak , for ωk −1 ≤ ω ≤ ωk , 1 ≤ k ≤ L, and can be considered as sum of L ideal
k
k
0
bandpass filters with cutoff frequencies at ωc1 = ωk −1 and ωc 2 = ωk , where ωc1 = 0
L
and ωc 2 = π. Now from Eq. (10.47) the impulse response of an ideal bandpass filter is
Not for sale
325
sin(ωc 2 n) sin(ωc1n)
. Therefore ,
−
πn
πn
sin(ωk n) sin(ωk −1n)
k
−
[ n] =
h BP
. Hence,
πn
πn
given by h BP [ n] =
h ML [ n] =
L
∑
k
[ n] =
h BP
k =1
L
⎛ sin(ωk n) sin(ωk −1n) ⎞
−
⎟
πn
πn
⎠
∑ Ak ⎜⎝
k =1
L −1
sin(ωk n) L −1 ⎛ sin(ωk n) sin(ωk −1n) ⎞
⎛ sin(ω1n) sin(0n) ⎞
= A1 ⎜
−
−
−
Ak
Ak ⎜
⎟
⎟+
πn ⎠ k = 2
πn
π
n
π
n
⎝ πn
⎝
⎠
k =2
∑
∑
⎛ sin(ω L n) sin(ω L −1 n) ⎞
+ AL ⎜
−
⎟
πn
πn
⎝
⎠
sin(ω1n) L −1 sin(ωk n) L −1 sin(ωk −1n)
sin(ωL −1n)
= A1
+
−
− AL
Ak
Ak
πn
πn
πn
πn
k =2
k =2
∑
=
∑
L −1
∑
L
sin(ωk n)
sin(ωk −1n)
−
.
Ak
πn
π
n
k =2
∑
Ak
k =1
sin(ωL n)
Since ωL = π, sin(ωL n) = 0. We add a term AL
to the first sum in the above
πn
expression and change the index range of the second sum, resulting in
h ML [ n] =
L
∑
Ak
k =1
sin(ωk n) L −1
sin(ωk n)
−
Ak + 1
.
πn
π
n
k =1
∑
Finally, since AL +1 = 0, we can add a term AL +1
L
sin(ωL n)
to the second sum. This leads to
πn
L
sin(ωk n) L
sin(ωk n)
sin(ωk n)
h ML [ n] =
Ak
Ak +1
−
=
( Ak − Ak + 1 )
.
π
n
π
n
π
n
k =1
k =1
k =1
∑
10.5
∑
∑
⎧ j, − π < ω < 0,
H HT (e jω ) = ⎨
Therefore,
⎩− j, 0 < ω < π.
1
hHT [ n] =
2π
1
=
2π
0
∫ je
−π
jωn
0
∫ H HT (e
jω
)e
j ωn
−π
1
dω −
2π
π
1
dω +
H HT (e jω )e jωn dω
2π
∫
0
π
∫ je
0
1
For n = 0, h HT [0] =
2π
0
∫
−π
jωn
2
2 sin 2 (πn / 2)
(1 − cos(πn)) =
dω =
if n ≠ 0.
πn
2 πn
1
jdω −
2π
π
∫ jdω = 0.
0
Not for sale
326
0,
if n = 0,
⎧
⎪
2
Hence, h HT [n] = ⎨ 2sin (πn / 2)
, if n ≠ 0.
⎪⎩
πn
Since hHT [ n] = −hHT [ − n], and the length of the truncated impulse response is odd, it is a Type
3 linear-phase FIR filter.
Magnitude
1
0.8
0.6
0.4
N=11
N=21
N=61
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
From the frequency response plots given above, we observe the presence of ripples at the
bandedges due to the Gibbs phenomenon caused by the truncation of the impulse response.
10.6
∞
H {x[ n]} =
∑ hHT [n − k ]x[k ] . Hence,
k = −∞
⎧⎪ jX (e jω ), − π < ω < 0,
F {H {x[ n]}} = H HT (e jω ) X (e jω ) = ⎨
⎪⎩− jX (e jω ), 0 < ω < π.
⎧⎪ j 4 X (e jω ),
− π < ω < 0,
jω
=
Y
(
e
)
= X (e jω ).
(a) Let y[ n] = H {H {H {H {x[n]}}}}. Hence,
⎨
4
ω
j
⎪⎩(– j ) X (e ), 0 < ω < π ,
Therefore, y[ n] = x[ n].
(b) Define g[ n] = H {x[ n]}, and h * [ n] = x[ n]. Then
But from the Parseval's' relation in Table 3.4,
Therefore,
∞
∞
∞
∞
∑ l = –∞ H {x[l]}x[l] = ∑ l = – ∞ g[l]h * [l].
π
∑ l = –∞ g[l]h * [l] = 2π ∫– π G(e jω )G(e jω )dω.
1
π
∑ l = – ∞ H {x[l]}x[l] = 2π ∫− π H HT (e jω )X (e jω )X (e – jω )dω where
1
⎧ j, − π < ω < 0,
H HT (e jω ) = ⎨
Since the integrand H HT (e jω ) X (e jω ) X (e – jω ) is an odd
−
<
<
,
0
.
j
ω
π
⎩
function of ω,
π
∫− π H HT (e
jω
) X (e jω ) X (e – jω )dω = 0. As a result,
Not for sale
∞
∑ l = –∞ H {x[l]}x[l] = 0.
327
10.7
N
∑ hLP [n] z − n .
H LP ( z ) =
Its frequency response H LP (e jω ) is shown in Figure (a)
n=0
π
2
j (ω − )
jω
π
2
j (ω + )
) + H LP (e
below. A plot of the frequency response H HT (e ) = H LP (e
is shown in Figure (b) below. It is evident from this figure that H HT (e jω ) is the
frequency response of an ideal Hilbert transformer. Therefore, we have
)
HLP (e jω )
1
π
_ __
2
_π
π
__
2
0
π
ω
(a)
HHT (e jω )
π
__
HLP(e j(ω + 2 ) )
_π
HLP(e j(ω
1
π
_ __
2
π
_ __
)
2 )
π
__
2
0
π
ω
(b)
H HT (e
=
=
N
jω
∑ hLP
) = H LP
π
j (ω + )
2 )+
(e
π
− jn (ω + )
2
[ n] e
n=0
N
N
+
H LP (e
∑ hLP
π
2
j (ω − )
)
π
− jn(ω − )
2
[ n] e
n=0
∑ 2 hLP [n]e − jnω cos
n=0
N
=
(
∑ hLP [n]e − jnω e − jnπ / 2 + e jnπ / 2
n=0
)
( ). Now, for n odd, cos(nω / 2) = 0 and hence, we can drop all
nπ
2
odd terms in the above expression. Let N = 2 M with N even and let r = 2n. Then, we
can rewrite the above equation as H HT (e jω ) =
M
∑ 2hLP [2r ] cos(rπ)e − j 2rω .
The
r =0
corresponding transfer function of the Hilbert transformer is therefore given by
H HT ( z ) =
10.8
M
∑ 2hLP [2n] cos(nπ) z − 2n
n =0
=
M
∑ 2(−1) n hLP [2n]z − 2n .
n=0
H DIF (e jω )= jω. Hence,
j π
j ⎛⎜ ωe jωn e jωn
1 π
jωn
jωn
h DIF [ n] =
j ωe
dω=
dω =
ωe
+
2π − π
2π − π
2π ⎜⎝ jn
n2
cos(πn) sin(πn) cos(πn)
h DIF [ n] =
, if n ≠ 0.
−
=
n
n
πn 2
∫
∫
Not for sale
⎞
⎟
⎟
⎠
π
−π
. Therefore,
328
1
For n = 0 , h DIF [0] =
2π
π
∫ jωdω = 0.
−π
n = 0,
⎧⎪ 0,
n
cos(
)
π
h
n
[
]
=
⎨
Hence, DIF
, | n | > 0. Since hDIF [ n] = −hDIF [ − n], the truncated impulse
⎪⎩ n
response is a Type 3 linear-phase FIR filter. The magnitude responses of the above
differentiator for several values of M are given below:
4
M=10
M=20
M=30
Magnitude
3
2
1
0
0
0.2
0.4
0.6
0.8
1
ω/π
10.9
N = 2 M + 1.
ω
⎧
for n = M ,
1− c ,
⎪
π
⎪
ˆh [ n] = ⎪⎨− sin (ωc (n − m)) , if n ≠ M , 0 ≤ n < N ,
HP
π (n − m)
⎪
⎪
otherwise.
⎪⎩
0,
Now, Hˆ HP ( z ) + Hˆ LP ( z ) =
=
∞
∑
hˆ HP [ n]z − n +
n = −∞
N −1
∞
∑
hˆ LP [ n]z − n =
n = −∞
N −1
N −1
n=0
n=0
∑
hˆ HP [ n]z − n +
∑ hˆLP [n]z −n
∑ (hˆHP [n] + hˆLP [n])z −n .
n=0
⎧0, 0 ≤ n ≤ N–1, n ≠ M ,
But hˆ HP [ n] + hˆ LP [ n] = hˆ HP [ n] + hˆ LP [ n] = ⎨
,
n=M .
⎩1,
Hence, Hˆ HP ( z ) + Hˆ LP ( z ) = z – M , i.e. the two filters are delay-complementary.
⎧ ω , ω < ωc ,
jω
10.10 H LLP (e ) = ⎨
Therefore,
⎩ 0, otherwise.
Not for sale
329
ωc
⎞
⎛
0
⎟
1 ⎜
j ωn
j ωn
hLLP [ n] =
dω + ωe
dω ⎟
− ωe
⎜
2π ⎜
⎟
0
⎠
⎝ − ωc
ω ⎞
0
⎛
⎡ ωe jωn e jωn ⎤ c ⎟
1 ⎜ ⎡ ωe jωn e jωn ⎤
+⎢
+
=
+
⎥ ⎟
⎥
⎜ −⎢
2
2π ⎜ ⎢⎣ jn
jn
n 2 ⎥⎦
n
⎥⎦ 0 ⎟
⎢
–ωc ⎣
⎠
⎝
jω n
− jω n
cos(ωc n) − 1
1 ⎛⎜ ωc e c − ωc e c
e jωc n + e − jωc n − 2 ⎞⎟ ωc
=
sin(ωc n) +
.
+
=
2
2
⎟
πn
2π ⎜
jn
π
n
n
⎝
⎠
∫
∫
⎧ω, ω < ωc ,
jω
Hence,
10.11 H BLDIF (e ) = ⎨
⎩ 0, otherwise.
ωc ⎞
⎛
ωc
⎟
1
1 ⎜ ⎡ ωe jωn e jωn ⎤
jωn
+
h BLDIF [ n] =
dω =
ωe
⎥
⎜⎢
⎟
2
2π
2π ⎜ ⎣⎢ jn
⎥
n
⎦
− ωc
−ωc ⎟⎠
⎝
∫
1 ⎛⎜ ωc e
=
2π ⎜
⎝
jωc n
+ ωc e − jωc n e jωc n − e − jωc n
+
jn
n2
⎞
⎟ = – j ωc cos(ω n) + j 1 sin(ω n).
c
c
⎟
πn
πn 2
⎠
10.12 The frequency response of a causal ideal notch filter can thus be expressed as
(
(
H notch (e jω ) = H notch (ω) e jθ (ω) where H notch (ω) is the amplitude response which can
(
(
⎧ 1, 0 ≤ ω ≤ ωo ,
be expressed as H notch (ω) = ⎨
It follows then that H notch (ω) is
⎩− 1, ωo < ω < π.
(
related to the amplitude response H LP (ω) of the ideal lowpass filter with a cutoff at ωo
(
(
Hence, the impulse response of the ideal
through H notch (ω) = ±[ 2 H LP (ω) − 1].
notch filter is given by hnotch [ n] = ±[2hLP [ n] − δ[ n]], where
sin(ωo n)
, − ∞ < n < ∞. The magnitude responses of a length 41 notch filter
πn
with a notch frequency at ωo = 0.4π and its associated length-41 lowpass filter are shown
below.
hLP [ n] =
Not for sale
330
Amplitude
1.5
1
0.5
0
o
0.2
0
1
0.8
0.6
0.4
= 0.4š
/
1
2π
10.13 Φ R =
( )2 dω , where H t (e jω ) = ∑ ht [n]e − jωn .
n=−M
∫ ( )
−π
π
M
H t e jω − H d e jω
∞
∑ ht [n] − hd [n]
Using Parseval’s relation, we can write Φ R =
2
n = −∞
M
ht [n] − hd [n] +
∑
=
2
n=−M
Now, Φ Haan =
− M −1
∞
n = −∞
n = M +1
∑ hd2 [n] + ∑ hd2 [n] .
∞
∑ hd [n]⋅ w Hann [n] − hd [n]
2
n = −∞
− M −1
∞
⎛1 1
⎛ 2πn ⎞ ⎞
2
=
hd [n]⎜⎜ + cos⎜
hd [n] +
hd2 [n]
⎟ ⎟⎟ − hd [n] +
⎝ 2M + 1⎠ ⎠
⎝2 2
n=−M
n = −∞
n = M +1
Hence, Φ Excess = Φ R − Φ Haan
2
M
∑
M
=
∑ hd [n]⋅ w R [n] − hd [n]
n=−M
=−
2
∑
10.14 Φ R =
∞
∑
M
⎛1 1
⎛ 2πn ⎞ ⎞
−
hd [n] ⋅ ⎜⎜ + cos⎜
⎟ ⎟⎟ − hd [n]
+
2
1
M
2
2
⎝
⎠⎠
⎝
n= −M
∑
hd [n] ⎛ 2πn ⎞ hd [n]
cos⎜
⎟−
2
2
1
2
M
+
⎝
⎠
n= −M
M
∑
2
∑ ht [n] − hd [n] and Φ Hamm =
2
n = −∞
2
2
=
1
(1 + 2 M ) cos⎛⎜ 2πM ⎞⎟ − 1 .
2
⎝ 2M + 1⎠
∞
∑ hd [n]⋅ w Hamm [n] − hd [n]
2
.
n = −∞
M
⎛
⎞
⎛ 2πn ⎞
Therefore, Φ Excess = Φ R − Φ Hamm = −
hd [n]⎜⎜ 0.46 cos⎜
⎟ − 0.46 ⎟⎟
⎝ 2M + 1 ⎠
⎝
⎠
n= −M
∑
M
⎛ ⎛ 2πn ⎞ ⎞
=−
0.46hd [n]⎜⎜ cos⎜
⎟ − 1⎟⎟
+
M
2
1
⎝
⎠ ⎠
⎝
n=−M
∑
2
2
2
⎛ 2πM ⎞
= 0.46(2 M + 1) cos⎜
⎟ −1 .
⎝ 2M + 1 ⎠
Not for sale
331
10.15 (a) ω p = 0.47π , ω s = 0.59π , δ p = 0.001 , δ s = 0.007 , ∆ω = 0.12π ,
α s = −20 log10 δ s = 43.1 dB
From Table 10.2, we see that for fixed-window functions, we can achieve the minimum
stopband attenuation by using Hann, Hamming, or Blackman windows. Hann will have
the lowest filter length.
3.11π
N Haan = ⎡2 M + 1⎤ = 53 since M =
= 25.917.
0.12π
Lowpass filter using Hann window
20
0
Magnitude Response
-20
-40
-60
-80
-100
-120
-140
0
0.1
0.2
0.3
0.4
0.5
ω/π
0.6
0.7
0.8
0.9
1
(b) ω p = 0.61π , ω s = 0.78π , δ p = 0.001 , δ s = 0.002 , ∆ω = 0.17π ,
α s = −20 log10 δ s = 54 dB
From Table 10.2, we see that for fixed-window functions, we can achieve the minimum
stopband attenuation by using either Hamming, or Blackman windows. Hamming will
have the lowest filter length.
3.32π
N Hamm = ⎡2 M + 1⎤ = 41 since M =
= 19.53 .
0.17π
Not for sale
332
Lowpass filter using Hamming window
20
Magnitude Response
0
-20
-40
-60
-80
-100
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
ω/π
10.16 ω p1 = 0.45π , ω p 2 = 0.65π , ω s1 = 0.3π , ω s 2 = 0.8π , ∆ω1 = ∆ω 2 = 0.15π ,
δ p = 0.01 , δ s1 = 0.008 , δ s 2 = 0.05
α s1 = −20 log10 δ s1 = 42 dB, α s 2 = −20 log10 δ s 2 = 26 dB
From Table 10.2, we see that the Hann window will have minimum length and meet the
minimum stopband attenuation.
3.11π
M=
= 21. Therefore, N = 43 .
0.15π
Not for sale
333
Bandpass filter using Hann window
20
0
Magnitude Response
-20
-40
-60
-80
-100
-120
-140
0
0.1
0.2
0.3
0.4
0.5
ω/π
0.6
0.7
0.8
0.9
1
10.17 ω p1 = 0.3π , ω p 2 = 0.8π , ω s1 = 0.45π , ω s 2 = 0.65π , ∆ω1 = ∆ω 2 = 0.15π ,
δ p1 = 0.05 , δ p 2 = 0.009 , δ s = 0.02 ,
α s = −20 log10 δ s = 34 dB
From Table 10.2, we see that the Hann window will have minimum length and meet the
minimum stopband attenuation.
Not for sale
334
Bandstop filter using Hann window
20
0
Magnitude Response
-20
-40
-60
-80
-100
-120
0
0.1
0.2
0.3
0.4
0.5
ω/π
0.6
0.7
0.8
0.9
1
10.18 Consider another filter with a frequency response G(e jω ) given by
0,
0 ≤ ω ≤ ωp ,
⎧
⎪
π (ω − ω p ) ⎞
⎪ − π sin⎛⎜
⎟,
ω p < ω ≤ ωs ,
⎟
⎪ 2∆ω ⎜⎝
∆ω
jω
⎠
G (e ) = ⎨
+
(
)
π
ω
ω
⎛
p ⎞
⎪ −π
⎜
⎟, − ωs ≤ ω ≤ −ω p ,
sin
⎪ 2∆ω ⎜
⎟
∆
ω
⎝
⎠
⎪
0
,
elsewhere.
⎩
jω
Clearly G(e ) =
dH (e jω )
. Now,
dω
⎛ π (ω − ω p ) ⎞
⎛ π (ω − ω p ) ⎞
⎛
⎟
⎟
⎜ ωs j⎜
ωs − j⎜
⎟ j n
⎜
⎟ jωn
⎜
π
ω
ω
∆
∆
−π ⎜
⎠ e ω dω
⎝
⎠e
⎝
1
e
d
ω
e
=
−
j ω j ωn
g[ n] =
G (e )e
dω 8π∆ωj ⎜
2π
ωp
⎜⎜ ω p
−π
⎝
∫
∫
+
∫
−ω p
⎛ π ( ω+ ω p ) ⎞
⎛ π ( ω+ ω p ) ⎞
⎞
⎟
⎟
−ω p − j ⎜
⎟
j⎜
⎟
⎜
⎟
⎜
∆ω ⎠ jωn
∆ω ⎠ jωn
⎝
⎝
e
e
dω −
e
e
dω ⎟
− ωs
− ωs
∫
Not for sale
∫
⎟
⎟
⎠
335
π ⎞⎤
π ⎞
π ⎞ ⎤
⎛
⎛
⎛
⎛
⎡ jω ⎛⎜ n − π ⎞⎟
⎡
jω p ⎜ n +
jω p ⎜ n −
⎟)
jπω p
⎟
⎜ jπω p ⎢ jωs ⎜ n + ⎟
s
⎢
⎥
∆
∆
∆
ω
∆
ω⎠ ⎥
ω
ω
⎝
⎠
⎝
⎠
⎝
⎠
⎝
−
−
e
−e
−1 ⎜
−e
⎥
⎥ − e ∆ω ⎢ e
e ∆ω ⎢
=
⎜
⎥
⎢
⎥
⎢
π ⎞
π ⎞
j8∆ω
⎛
⎛
⎜
j⎜ n +
j⎜ n −
⎟
⎟
⎥
⎢
⎥
⎢
⎜
∆ω ⎠
∆ω ⎠
⎝
⎝
⎦
⎣
⎦
⎣
⎝
π ⎞⎤
π ⎞ ⎤⎞
⎛
⎛
⎡ − jω ⎛⎜ n + π ⎞⎟
⎡ − jω ⎛⎜ n − π ⎞⎟
− jω s ⎜ n −
− jω s ⎜ n +
jπω p
jπω p
⎟ ⎟
⎟
p
p
⎢
⎢
⎝ ∆ω ⎠ ⎥ ⎟
⎝ ∆ω ⎠ − e
⎝ ∆ω ⎠ ⎥
⎝ ∆ω ⎠ − e
−
e
e
⎥ − e ∆ω ⎢
⎥
+ e ∆ω ⎢
⎢
⎥
⎢
⎥⎟
π
π
⎛
⎞
⎛
⎞
+
−
j
n
j
n
⎜
⎟
⎜
⎟
⎢
⎥
⎢
⎥ ⎟⎟
∆
ω
∆
ω
⎝
⎠
⎝
⎠
⎣
⎦
⎣
⎦⎠
⎛
⎞
⎛
⎜
⎟
⎜
− 1 ⎜ − sin(ωs n) − sin(ω p n) − sin(ωs n) − sin(ω p n) ⎟ = sin(ωs n) + sin(ω p n) ⎜ − 2π / ∆ω
=
−
⎜
⎟
4∆ωj
π ⎞
π ⎞
4∆ωj ⎜
⎛
⎛
π2
2
⎜
⎟
⎜
⎜n +
⎟
⎜n −
⎟
⎜n −
∆ω ⎠
∆ω ⎠
⎝
⎝
⎠
⎝
∆ω 2
⎝
⎞
sin(ωc n) cos(∆ωn / 2) ⎛⎜
1
⎟.
=
⎜ π 1 − (∆ω / π ) 2 n 2 ⎟
∆ωj
⎝
⎠
⎛ cos(∆ωn / 2) ⎞⎛ sin(ωc n) ⎞
j
⎜
⎟⎜
h
n
=
[
]
⎟.
Now, h[ n] = g[ n]. Therefore,
⎜ 1 − (∆ω / π ) 2 n 2 ⎟⎝ πn ⎠
n
⎝
⎠
(
(
)
)
⎡
⎛ 4πn ⎞ ⎤
⎛ 2πn ⎞
⎟ ⎥ w R [ n]
⎟ + γ cos⎜
10.19 wGC [ n] = ⎢α + β cos⎜
⎝ 2 M + 1 ⎠⎦
⎝ 2M + 1 ⎠
⎣
⎡
⎛ 2 πn ⎞ ⎞
⎛ 4 πn ⎞ ⎞ ⎤
⎛ j ⎛⎜ 2πn ⎞⎟
⎛ j ⎛⎜ 4πn ⎞⎟
− j⎜
− j⎜
⎟⎟
⎟ ⎟⎥
⎜
⎜
⎢
= ⎢ α + 2 β ⎜ e ⎝ 2 M + 1 ⎠ + e ⎝ 2 M + 1 ⎠ ⎟ + 2 γ⎜ e ⎝ 2 M + 1 ⎠ + e ⎝ 2 M + 1 ⎠ ⎟ ⎥ w R [ n ]
⎜
⎟
⎜
⎟⎥
⎢
⎝
⎠
⎝
⎠⎦
⎣
⎛ j ⎛⎜ ω − 2 π ⎞⎟ ⎞
⎛ j ⎛⎜ ω + 2 π ⎞⎟ ⎞
⎜
⎟
⎜
⎟
Hence, ΨGC (e jω ) = αΨR (e jω ) + 2 βΨR ⎜ e ⎝ 2 M + 1 ⎠ ⎟ + 2 βΨR ⎜ e ⎝ 2 M + 1 ⎠ ⎟
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
⎛ j ⎛⎜ ω − 4π ⎞⎟ ⎞
⎛ j ⎛⎜ ω + 4π ⎞⎟ ⎞
⎜
⎟
⎜
⎟
2 M +1 ⎠
2 M +1 ⎠
⎝
+ 2 γΨR ⎜ e
⎟ + 2 γΨR ⎜ e ⎝
⎟.
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
For the Hann window :
ΨHaan (e
jω
) = 0.5ΨR (e
= 0.5,
jω
= 0.5 and
= 0. Hence,
⎛ j ⎛⎜ ω − 2π ⎞⎟ ⎞
⎛ j ⎛⎜ ω + 2 π ⎞⎟ ⎞
⎜
⎟
⎜
⎟
2
+
1
2 M +1 ⎠
M
⎠ + 2 βΨ e ⎝
) + ΨR ⎜ e ⎝
⎟
⎟
R⎜
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
Not for sale
336
⎞
⎟
⎟
⎟
⎟
⎟
⎠
⎛ (2 M + 1)ω ⎞ sin⎛⎜ (2 M + 1)⎛ ω − π ⎞ ⎞⎟ sin⎛⎜ (2 M + 1)⎛ ω + π ⎞ ⎞⎟
⎟⎟
⎜
⎟⎟
⎜
sin⎜
⎟
⎜
⎜
2
⎝ 2 2M + 1 ⎠ ⎠
⎝ 2 2M + 1 ⎠ ⎠
⎝
⎝
⎠
⎝
.
+
+
= 0.5
sin(ω / 2)
π ⎞
π ⎞
⎛ω
⎛ω
sin⎜ −
sin⎜ +
⎟
⎟
⎝ 2 2M + 1 ⎠
⎝ 2 2M + 1 ⎠
For the Hamming window,
= 0.54,
= 0.46, and
= 0. Hence,
⎛ j ⎛⎜ ω − 2 π ⎞⎟ ⎞
⎛ j ⎛⎜ ω + 2π ⎞⎟ ⎞
⎜
⎟
⎜
⎟
ΨHam min g (e jω ) = 0.54ΨR (e jω ) + 0.92ΨR ⎜ e ⎝ 2 M + 1 ⎠ ⎟ + 0.92ΨR ⎜ e ⎝ 2 M + 1 ⎠ ⎟
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
⎛
⎛
π ⎞⎞
π ⎞⎞
⎛ω
⎛ω
⎛ (2 M + 1)ω ⎞
sin⎜⎜ (2 M + 1)⎜ +
sin⎜⎜ (2 M + 1)⎜ −
⎟ ⎟⎟
⎟ ⎟⎟
sin⎜
⎟
2
⎝ 2 2M + 1⎠ ⎠
⎝ 2 2M + 1 ⎠ ⎠
⎝
⎝
⎠
⎝
.
+ 0.92
+ 0.92
= 0.54
F
sin(ω / 2)
π ⎞
π ⎞
⎛ω
⎛ω
sin⎜ +
sin⎜ −
⎟
⎟
⎝ 2 2M + 1 ⎠
⎝ 2 2M + 1⎠
or the Blackmann window
= 0.42, = 0.5 and = 0.08
⎛ j ⎛⎜ ω − 2π ⎞⎟ ⎞
⎛ j ⎛⎜ ω + 2 π ⎞⎟ ⎞
⎜
⎟
⎜
⎟
jω
jω
2
+
1
2 M +1 ⎠
M
⎠ +Ψ e ⎝
ΨBlackman (e ) = 0.42ΨR (e ) + ΨR ⎜ e ⎝
⎟
⎟
R⎜
⎜
⎟
⎜
⎟
⎝
⎠
⎝
⎠
⎛ j ⎛⎜ ω− 4π ⎞⎟ ⎞
⎛ j ⎛⎜ ω− 4π ⎞⎟ ⎞
⎟
⎜
⎟
⎜
+ 0.16ΨR ⎜ e ⎝ 2 M +1 ⎠ ⎟ + 0.16ΨR ⎜ e ⎝ 2 M +1 ⎠ ⎟
⎟
⎜
⎟
⎜
⎠
⎝
⎠
⎝
⎛ (2 M + 1)ω ⎞ sin⎛⎜ (2 M + 1)⎛ ω − π ⎞ ⎞⎟ sin⎛⎜ (2 M + 1)⎛ ω + π ⎞ ⎞⎟
⎟⎟
⎜
⎟⎟
⎜
sin⎜
⎟
⎜
⎜
2
⎝ 2 2M + 1 ⎠⎠
⎝ 2 2M + 1 ⎠ ⎠
⎝
⎝
⎠
⎝
+
+
= 0.42
sin(ω / 2)
π ⎞
π ⎞
⎛ω
⎛ω
sin⎜ −
sin⎜ +
⎟
⎟
⎝ 2 2M + 1 ⎠
⎝ 2 2M + 1 ⎠
⎛
⎛
2π ⎞ ⎞
2π ⎞ ⎞
⎛ω
⎛ω
sin⎜⎜ (2 M + 1)⎜ −
sin⎜⎜ (2 M + 1)⎜ −
⎟ ⎟⎟
⎟ ⎟⎟
⎝ 2 2M + 1⎠ ⎠
⎝ 2 2M + 1⎠ ⎠
⎝
⎝
+ 0.16
+ 0.16
.
2π ⎞
2π ⎞
⎛ω
⎛ω
sin⎜ −
sin⎜ −
⎟
⎟
⎝ 2 2M + 1 ⎠
⎝ 2 2M + 1⎠
N
10.20 (a) H ( z ) = z − D ≈ ∑ h[n ]z − n = h[0] + h[1]z −1 + h[2]z − 2 + L + h[N ]z − N
n =0
We see that if xˆ a (t ) =
N2
N2
⎛ t − tl
⎜⎜
l = − N1 ⎝ t k − t l
∑ Pk (t )x[n + k ], then Pk (t ) = ∏
k = − N1
⎞
⎟⎟ for − N1 ≤ k ≤ N 2 .
⎠
l≠k
Not for sale
337
Here, we have Hˆ (z ) =
N
∑ h[n]z −n and the solution follows if
n=0
Pk (t ) = h[n] , N1 = 0 , N 2 = N , k = n , t = D , t l = k , and t k = n
Therefore, we have h[n] =
N
D−k
∏ n−k
for 0 ≤ n ≤ N .
k =0
k≠n
(b) N = 21, D = 90/13, L = 22. H (z ) ≈
21
∑
h[n]z − n , where h[n] =
n=0
21
90 / 13 − k
.
n
−
k
k =0
∏
k≠n
% Problem #10.20
D = 90/13;
N = 21;
for n = 0:N,
for k = 0:N,
if n ~= k,
tmp(n+1,k+1) = (D-k)/(n-k);
else
tmp(n+1,k+1) = 1;
end
end
end
h = prod(tmp');
[Gd,W] = grpdelay(h,1,512);
[H, w] = freqz(h,1,512);
figure(1);
plot(W/pi, Gd);
xlabel('\omega/\pi');
ylabel('Group Delay');
title('Group delay of z^-^D');
grid;
figure(2);
plot(w/pi, (abs(H)));
xlabel('\omega/\pi');
ylabel('Magnitude');
title('Magnitude response of z^-^D');
grid;
Not for sale
338
Group delay of z
Magnitude response of z
-D
-D
1.5
8
Magnitude
Group Delay
1.4
7.5
7
1.3
1.2
1.1
1
6.5
0.9
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
10.21 (a) x[ n] = s[ n] +
0.6
0.8
1
ω/π
ω/π
M
∑ Ak sin(kωo n +φ k ) = s[n] + r[n], where s[n] is the desired signal and
k =0
r[ n] =
M
∑ Ak sin(kωo n +φ k ) is the harmonic interference with fundamental
k =0
frequency ωo . Now, r[ n − D] =
M
∑ Ak sin[kωo (n − D) +φ k ]
k =0
=
M
∑ Ak sin(kωo n +φ k −2πk ) = r[n].
k =0
(b) y[ n] = x[ n] − x[ n − D] = s[ n] + r[ n] − s[ n − D] − r[ n − D] = s[ n] + r[ n] − s[ n − D] − r[ n]
= s[ n] − s[ n − D]. Hence, y[ n] does not contain any harmonic disturbances.
(c) H c ( z ) =
(1 − cos( Dω)) + j sin( Dω) .
1 − e − jDω
=
. Thus, H c (e jω ) =
−D −D
− D − jDω
1 − ρ D cos( Dω) + jρ D sin( Dω)
1− ρ e
1− ρ z
1 − z −D
Then, H c (e jω ) =
(
2(1 − cos( Dω))
D
1 − 2 ρ cos( Dω) + ρ
ρ = 0.99 is shown below:
2D
Not for sale
)
. A plot of H c (e jω ) for ωo = 0.22π and
339
Amplitude
1
0.8
0.6
0.4
0.2
0
-1
-0.5
0
0.5
1
ω/π
(d)
y[n]
x[n]
z–D
–
+
P( z)
1 − N ( z)
, with D = 2π / 0.18π , N = 18, and ρ = 0.98 .
=
Q( z) 1 − 0.98 D N ( z)
% Problem #10.23
close all;
clear;
clc;
D = 2/.18;
N = 18;
rho = 0.98;
for n = 0:N,
for k = 0:N,
if n ~= k,
tmp(n+1,k+1) = (D-k)/(n-k);
else
tmp(n+1,k+1) = 1;
end
end
end
h = prod(tmp');
[H,w] = freqz(h,1,1024);
Hc = (1-H)./(1-(rho^D)*H);
x = sqrt((2*(1-cos(D*w)))./(12*(rho^D)*cos(D*w)+rho^(2*D)));
%plot(w/pi, abs(Hc));
plot(w/pi, x); grid;
xlabel('\omega/\pi');
ylabel('Magnitude');
title(‘Comb filter using FIR fractional delay');
10.22 H c ( z) =
Not for sale
340
Comb filter using FIR fractional delay
Magnitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
P( z)
D( z) − z −11 D( z −1 )
=
, with D = 2π / 0.18π = 11.11 and N = 11.
Q( z) D( z) − 0.98 90 / 13 z −11 D( z −1 )
% Problem #10.23
close all;
clear;
clc;
D = 2/0.18;
rho = 0.98;
N = floor(D);
for k = 1:N,
for n = 0:N,
p(n+1) = (D-N+n)/(D-N+k+n);
end
d(k) = ((-1)^k)*nchoosek(N,k)*prod(p);
end
[H,w] = freqz(fliplr(d)-d, fliplr(d)-(rho^D).*d , 512);
plot(w/pi, abs(H));grid;
xlabel('\omega/\pi');
ylabel('Magnitude');
title(Comb filter using allpass IIR fractional delay');
10.23 H c ( z) =
Comb filter using allpass IIR fractional delay
Magnitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
341
−ω p ≤ ω ≤ ω p ,
1,
⎧
⎪ ⎛
⎪1 − ⎜ ω − ω p ⎞⎟, ω < ω ≤ ω ,
p
s
⎪⎪ ⎜ ωs − ω p ⎟
jω
⎝
⎠
=
(
)
⎨
10.24 H LP e
⎪ ⎛⎜ ω + ω p ⎞⎟
⎪1 + ⎜ ω − ω ⎟, −ωs < ω ≤ ω p ,
p⎠
⎪ ⎝ s
⎪⎩
0,
elsewhere.
Now, for n ≠ 0, hLP [ n] =
1
2π
π
∫ H LP (e
jω
)e jωn dω
−π
−ωp
⎡ ωp
ωs
ω − ω p ⎞ jωn
ω + ωp
⎛
⎛
1 ⎢
jωn
⎜1 −
⎟e
⎜1 +
=
+
+
e
d
ω
d
ω
⎜
⎜
2π ⎢
∆ω ⎟⎠
∆ω
− ωs ⎝
ωp ⎝
⎢⎣ − ω p
−ω p
⎡ ωs
⎤
ωs
ω − ω p jωn
ω + ω p jωn ⎥
1 ⎢
jωn
=
e
dω −
e
dω +
e
dω⎥
2π ⎢
∆ω
∆ω
− ωs
ωp
⎢⎣ − ωs
⎥⎦
∫
∫
∫
∫
∫
⎤
⎞ jωn ⎥
⎟e
dω⎥
⎟
⎠
⎥⎦
∫
ωs
– ωp ⎫
⎧
jωn
jωn
⎪⎪
e jωn ⎤⎥
e jωn ⎤⎥
1 ⎪⎪ 2sin(ωs n)
1 ⎡⎢ (ω − ω p )e
1 ⎡⎢ (ω + ω p )e
+
+
=
−
+
⎬
⎨
2 ⎥
2 ⎥
jn
jn
2π ⎪
∆ω ⎢
∆ω ⎢
πn
n
n
⎦ – ωs ⎪⎪
⎣
⎦ ωp
⎣
⎪⎩
⎭
jω n
− jω p n
⎧
⎫
− ∆ωe − jωs n e
1 ⎪ 2sin(ωs n)
− e − jωs n ⎤ ⎪
1 ⎡ ∆ωe jωs n e jωs n − e p
⎢
⎥
=
−
+
+
−
⎨
⎬
2
2
2π ⎪
jn
πn
∆ω ⎢
jn
⎥⎪
n
n
⎣
⎦⎭
⎩
=
1 ⎧⎪ 2sin(ωs n)
2 ⎡ ∆ω sin(ωs n) cos(ωs n) − cos(ω p n) ⎤ ⎫⎪
−
+
⎥⎬
⎢
⎨
2π ⎪⎩
πn
∆ω ⎣⎢
n
n2
⎦⎥ ⎪⎭
1 ⎧ cos((ωc − ∆ω / 2)n) cos((ωc + ∆ω / 2)n) ⎫
1 ⎧⎪ cos(ω p n) cos(ωs n) ⎫⎪
=
−
−
⎨
⎬
⎨
⎬
∆ω ⎪⎩ πn 2
πn 2
πn 2
⎭
πn 2 ⎪⎭ ∆ω ⎩
2 sin(∆ωn / 2) sin(ωc n)
=
.
∆ωn
πn
=
1
Next, for n = 0, h LP [0] =
2π
=
(
)
π
∫ H LP (e
jω
) dω =
−π
1
(area under the curve)
2π
ω
1 2 ωs + ω p
= c.
π
2π
2
Not for sale
342
ωc
⎧
,
if n = 0,
⎪
π
h
n
[
]
=
⎨ 2sin(∆ωn / 2) sin(ω n)
Hence, LP
c
⎪
, if n ≠ 0.
∆ωn
πn
⎩
An alternate approach to solving this problem is as follows. Consider the frequency response
⎧ 0, − ω p ≤ ω ≤ ω p ,
⎪ 1
jω
d H LP (e ) ⎪⎪ – ∆ω , ω p < ω < ωs ,
G ( e jω ) =
=⎨
Its inverse DTFT is given by
dω
⎪ 1 , − ωs < ω < − ω p ,
⎪ ∆ω
⎪⎩
0, elsewhere.
1
g[ n] =
2π
π
∫ G (e
jω
)e
jωn
–π
1
dω =
2π
– ωp
∫
– ωs
1 jωn
1
e
dω −
∆ω
2π
ωs
∫
ωp
1 jωn
e
dω
∆ω
−ωp
ωs ⎞
⎛
⎟
e jωn
1 ⎜ e jωn
1
⎜
⎟ =
=
−
cos(ω p n) − cos(ωs n) .
jn
π
2 ∆ω ⎜
jn
j
n
∆
π
ω
⎟
⎜
− ωs
ω p ⎟⎠
⎝
1
j
cos(ω p n) − cos(ωs n)
Thus, hLP [ n] = g[ n] = 2
n
πn ∆ω
⎛⎛
1 ⎡ ⎛⎛
∆ω ⎞ ⎞
∆ω ⎞ ⎞ ⎤
cos⎜⎜ ⎜ ωc −
=
⎟n ⎟⎥
⎟ n ⎟⎟ − cos⎜⎜ ⎜ ωs +
⎢
2 ⎠ ⎠
2 ⎠ ⎟⎠ ⎦
⎝⎝
πn 2 ∆ω ⎣ ⎝ ⎝
(
(
=
)
)
2sin(∆ωn / 2) sin(ωc n)
⋅
, for n ≠ 0.
πn
∆ωn
For n = 0, hLP [ n] =
ωc
.
π
10.25 Consider the case when the transition region is approximated by a second order spline. In
this case the ideal frequency response can be constructed by convolving an ideal, notransition-band frequency response with a triangular pulse of width ∆ω = ωs − ω p ,
which in turn can be obtained by convolving two rectangular pulses of width ∆ω / 2 . In
the time domain this implies that the impulse response of a filter with transition band
approximated by a second order spline is given by the product of the impulse response of
an ideal low pass filter with no transition region and square of the impulse response of a
rectangular pulse. Now,
Not for sale
343
H LP (ideal ) [ n] =
sin(ωc n)
sin(∆ωn / 4)
and H rec [ n] =
. Hence,
πn
∆ωn / 4
H LP [ n] = H LP(ideal) [ n](H rec [ n])2 .
Thus for a lowpass filter with a transition region approximated by a second order spline
ωc
⎧
if n = 0,
,
⎪⎪
π
hLP [ n] = ⎨
2
⎪⎛⎜ sin(∆ωn / 4) ⎞⎟ sin(ωc n) , otherwise.
⎪⎩⎝ ∆ωn / 4 ⎠
πn
Similarly the frequency response of a lowpass filter with the transition region specified by a
P -th order spline can be obtained by convolving in the frequency domain an ideal filter with no
transition region with P rectangular pulses of width ∆ω / P. Hence,
H LP [ n] = H LP(ideal) [ n](H rec [ n]) P , where the rectangular pulse is of width ∆ω / P. Thus
ωc
⎧
,
if n = 0 ,
⎪⎪
π
hLP [ n] = ⎨
P
⎪⎛⎜ sin(∆ωn / 2 P ) ⎞⎟ sin(ωc n) , otherwise.
πn
⎩⎪⎝ ∆ωn / 2 P ⎠
(
(
10.26 From Step 2, we have G (e jω ) = G (ω)e − jNω = δ s( F ) e − jNω + F (ω)e − jNω .
(
The amplitude response G (ω) has been obtained by raising the amplitude response
(
F (ω) by δ s( F ) and hence, the filter G (z ) has double zeros in the stopband.
Not for sale
344
We may factorize as follows: G ( z ) = z − N H m ( z ) H m ( z −1 ), where H m (z ) is a real-coefficient
(
minimum-phase FIR lowpass filter with half the degree of the original H (z ). Since, G (ω) ≥ 0,
(
the amplitude response H m (ω) of the minimum-phase filter H m (z ) does not oscillate about
(
unity in the passband. Since the original frequency response was raised by δ s( F ) , H m (ω) must be
normalized by a factor 1 + δ s . Therefore,
(
For H m (ω) , we can see δs(F ) =
1 + δ p + δs
δp
2δ s
and δ (pF ) =
−1 = 1+
−1.
1 + δs
1 + δs
1 + δs
10.27 (a) N = 1 and hence, x a (t ) = α 0 + α1t. Without any loss of generality, for L = 5. we first
fit the data set {x[ k ]}, − 5 ≤ k ≤ 5, by the polynomial x a (t ) = α 0 + α1t with a minimum
mean-square error at t = −5, − 4,K , − 1, 0,1,K ,5, , and then replace x[ 0] with a new value
x[ 0 ] = x ( 0 ) = α 0 .
Now, the mean-square error is given by ε(α0 , α1 ) =
5
∑ (x[k ] − α0 − α1k )2 . We set
k = −5
5
5
∂ ε(α 0 , α1 )
∂ ε(α 0 , α1 )
= 0 and
= 0 which yields 11α 0 + α1 ∑ k = ∑ x[ k ], and
∂α 0
∂α1
k = −5 k = −5
5
5
5
k = −5
k = −5
k = −5
α0 ∑ k + α1 ∑ k 2 = ∑ k x[ k ].
From the first equation we get x[0] = α 0 =
5
∑
1
x[ k ]. In the general case we thus
11 k = −5
Not for sale
345
5
∑
1
have x[ n] = α0 =
x[ k ] which is a moving average filter of length 11.
11 k = −5
(b) N = 2, and hence, x a (t ) = α 0 + α1t + α 2 t 2 . Here, we fit the data set {x[ k ]},
− 5 ≤ k ≤ 5, by the polynomial x a (t ) = α 0 + α1t + α 2 t 2 with a minimum mean-square
error at t = −5, − 4,K , − 1, 0,1,K ,5, and then replace x[ 0] with a new value
x[0] = x a (0) = α 0 . The mean-square error is now given by
5
∑ (x[k ] − α0 − α1k − α2 k 2 ) .
ε (α 0 , α1 , α 2 ) =
2
We set
k = −5
∂ ε(α 0 , α1 , α 2 )
= 0,
∂α 0
∂ ε(α 0 , α1 , α 2 )
∂ ε(α 0 , α1 , α 2 )
= 0, and
= 0, which yields
∂α1
∂α 2
5
∑
11α 0 + 110α 2 =
5
x[ k ], 110α1 =
k = −5
∑
k x[ k ], 110α 0 + 1958α 2 =
k = −5
5
∑ k 2 x[k ].
From the
k = −5
first and the third equations we then get
5
1958
∑
x[ k ] − 110
k = −5
5
∑ k 2 x[k ]
k = −5
(1958 × 11) − (110) 2
α0 =
5
∑(
)
1
=
89 − 5k 2 x[ k ].
429 k = −5
Hence, here we replace x[n] with a new value x[ n] = α0 which is a weighted combination of
the original data set {x[ k ]}, − 5 ≤ k ≤ 5 :
5
∑(
)
1
x[ n ] =
89 − 5k 2 x[ n − k ]
429 k = −5
=
1
(−36 x[ n + 5] + 9 x[ n + 4] + 44 x[ n + 3] + 69 x[ n + 2] + 84 x[ n + 1] + 89 x[ n]
429
+84 x[ n − 1] + 69x[ n − 2] + 44 x[ n − 3] + 9 x[ n − 4] − 36 x[ n − 5]).
(c) The impulse response of the FIR filter of Part (a) is given by
1
h1[ n] = {1 1 1 1 1 1 1 1 1 1 1},
11
whereas, the impulse response of the FIR filter of Part (b) is given by
1
h1[ n] =
{− 36 9 44 69 84 89 84 69 44 9 − 36}.
429
The corresponding frequency responses are given by
H1
( e jω ) =
5
5
∑(
∑
)
1
1
e − jωk , and H 2 (e jω ) =
89 − 5k 2 e − jωk .
11 k = −5
429 k = −5
Not for sale
346
A plot of the magnitude responses of these two filters are shown below from which it can
be seen that the filter of Part (b) has a wider passband and thus provides smoothing over a
larger frequency range than the filter of Part (a).
1
H1(z)
H2(z)
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
10.28 y[ n] =
1
{−3 x[ n − 7] − 6 x[ n − 6] − 5 x[n − 5] + 3 x[ n − 4] + 21x[ n − 3] + 46 x[ n − 2]
320
+ 67 x[ n − 1] + 74 x[ n] + 67 x[ n + 1] + 46 x[ n + 2] + 21x[ n + 3] + 3 x[ n + 4]
+ 5 x[ n + 5] − 6 x[ n − 6] − 3 x[ n + 7]}.
{
Y ( e jω )
1
=
− 3e − j 7ω − 6e − j 6ω − 5e − j 5ω + 3e − j 4ω + 21e − j 3ω
X (e jω ) 320
46e − j 2ω +67e − jω + 74 +67e jω + 46e j 2ω + 21e j 3ω + 3e j 4ω − 5e j 5ω − 6e j 6ω − 3e j 7ω .
1
{74 + 67cos ω + 46cos(2ω) + 21cos(3ω) + 3cos(4ω)– 5cos(5ω) – 6cos(6ω) – 3cos(7ω)}
=
160
– 5cos(5ω) – 6cos(6ω) – 3cos(7ω)}.
Hence, H 3 (e jω ) =
}
The magnitude response of the above FIR filter H 3 ( z) is plotted below (solid line) along
with that of the FIR filter H 2 ( z) of Part (b) of Problem 10.27 (dashed line). Note that
both filters have roughly the same passband but the Spencer's filter has very large
attenuation in the stopband and hence it provides better smoothing than the filter of Part
(b).
1
H3(z)
H2(z)
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
347
10.29 (a) L = 3. P ( x ) = α1 x + α 2 x 2 + α 3 x 3 . Now P (0) = 0 is satisfied by the way P (x ) has
been defined. Also to ensure P (1) = 1 we require α1 + α 2 + α3 = 1 . Choose m = 1 and
n = 1. Since
dP ( x )
= 0, hence α1 + 2α 2 x + 3α3 x 2
= 0, implying α1 = 0 . Also
x =0
dx x = 0
dP( x )
= 0, hence α1 + 2α 2 + 3α3 = 0 . Thus solving the three equations:
dx x =1
α1 + α 2 + α3 = 1 , α1 = 0 ,and α1 + 2α 2 + 3α3 = 0
since
we arrive at
1
0,
2
3 , and
–2. Therefore, P ( x ) = 3 x 2 − 2 x 3 .
3
(b) L = 4. Hence, P ( x ) = α1 x + α 2 x 2 + α 3 x 3 + α 4 x 4 . Choose m = 2 and n = 1
(alternatively one can choose m = 1 and n = 2 for better stopband performance ). Then,
P (1) = 1 ⇒ α1 + α 2 + α3 + α 4 = 1. Also,
dP( x )
= 0 ⇒ α1 + 2α2 x + 3α3 x 2 + 4α 4 x 3 x = 0 = 0,
dx x = 0
d 2 P( x )
= 0 ⇒ 2α2 + 6α3 x + 12α 4 x 2 x = 0 = 0,
2
dx
x=0
dP( x )
= 0 ⇒ α1 + 2α2 + 3α3 + 4α 4 = 0.
dx x =1
Solving the above four simultaneous equations we get
1
0,
2
0,
3
4, and
4
– 3.
Therefore, P ( x ) = 4 x 3 − 3 x 4 .
(c) L = 5. Hence P ( x ) = α1 x + α 2 x 2 + α3 x 3 + α 4 x 4 + α 5 x 5 . Choose m = 2 and n = 2 .
Following a procedure similar to that in parts (a) and (b) we get 1 0, 2 0, 3 10,
4 –15, and
5 6.
M
(
10.30 From Eq. (7.102) we have H (ω) =
c[ k ] sin(ωk ). Now
∑
k =1
M
M
(
H (π − ω) =
c[ k ] sin((π − ω)k ) = −
∑
k =1
∑
c[ k ] sin(ωk ) cos(π k ) =
k =1
M
∑ c[k ](−1) k +1 (ωk ).
k =1
M
M
(
(
Thus, H (ω) = H (π − ω) implies
c[ k ] sin(ωk ) =
c[ k ] (−1) k + 1 sin(ωk ), or
∑
k =1
∑
k =1
M
equivalently,
k = 2, 4, 6,K.
∑ (1 − (−1) k +1 )c[k ] sin(ωk ) = 0, which in turn implies that c[k ] = 0 for
k =1
Not for sale
348
1
2
But from Eq. (7.103) we have c[ k ] = 2 h[ M − k ], 1 ≤ k ≤ M , or, h[ k ] = c[ M − k ]. For k even,
1
2
i.e., k = 2 R, h[2 R ] = c[ M − 2 R] = 0 if M is even.
10.31 (a) H [ k ] = H (e jωk ) = H (e j 2πk / M ), 0 ≤ k ≤ M − 1. Thus, h[ n] =
M −1
∑
1
− kn ,
H [ k ] WM
M k =0
where WM = e − j 2πk / M .
Now, H ( z) =
M −1
∑
M −1 M −1
M −1
⎛ M −1
⎞
1
− kn z − n = 1
− kn z − n ⎟.
H [ k ] WM
H[ k ]⎜
WM
⎜
⎟
M n=0 k =0
M k =0
⎝ n=0
⎠
∑ ∑
h[ n] z − n =
n=0
M −1
We can write
=
∞
∑
∑
− kn z − n
WM
n=0
∞
∑
− kn z − n
WM
n=0
=
− kn z − n − W − kM z − M
WM
M
n=0
∑
∞
∑
−
∑
∞
∑ WM− kn z − n
n= M
(
− kn z − n = 1 − z − M
WM
n=0
∞
)∑ WM− kn z − n = 1 −1 W− z− k z −1 .
−M
n=0
M
M −1
H[ k ]
1 − z− M
Therefore, H ( z) =
.
− k z −1
M
−
W
1
M
k =0
∑
(b)
1
1 z 1
x[n]
1 z M
H[0]
M
H[1]
M
1
1 z 1e j2 / M
1
1 z
y[n]
H[M 1]
M
1e j2 (M 1)/ M
M −1
M −1
⎞
⎛ M −1
1− z−M
H[ k ]
1
− kn z − n ⎟.
H[ k ] ⎜
WM
=
(c) Note H ( z) =
− k −1
⎟
⎜
M
M k =0
k = 0 1 − WM z
⎠
⎝ n=0
∑
∑
Not for sale
∑
349
⎛ M −1
⎞
− kn e − jωn ⎟. For
H[ k ] ⎜
WM
⎜
⎟
M k =0
⎝ n=0
⎠
M −1
M
−
1
⎞
⎛ 1
− kn e − 2πln / M ⎟
H[ k ] ⎜
WM
ω = j 2πl / M , we then get from the above H (e j 2πl / M ) =
⎟
⎜M
k =0
⎠
⎝ n=0
M −1
M
−
1
M
−
1
M
−
1
⎞
⎞
⎛ 1
⎛ 1
− ( k − l)n ⎟
− knW ln ⎟ =
⎜
H[ k ] ⎜
WM
H
[
k
]
W
. Using the identity of Eq.
=
M ⎟
M
⎟
⎜M
⎜M
k =0
⎠ k =0
⎠
⎝ n=0
⎝ n=0
1
On the unit circle the above reduces to H (e jω ) =
M −1
∑
∑
∑
∑
∑
∑
∑
∑
M −1
if l = k,
1
− ( k − l )n ⎧1,
=⎨
WM
(5.23) of text we observe that
M n=0
⎩0, otherwise.
Hence, H (e j 2 πl / M ) = H [ l].
∑
10.32 (a) For Type 1 FIR filter,
H ( e jω ) =
e
−j
ω( M − 1)
2
H (e jω ) . Since in the frequency
2πk
,
M
0 ≤ k ≤ M − 1, therefore H [ k ] = H (e j 2πk / M ) = H d (e j 2πk / M ) e j 2πk ( M −1) / M ,
sampling approach we sample the DTFT H (e jω ) at M points given by ω =
0 ≤ k ≤ M − 1. Since the filter is of Type 1, M − 1 is even, thus, e j 2πk ( M −1) / 2 = 1. .
Moreover, h[n] being real, H (e jω ) = H * (e jω ). Thus, H (e jω ) = e jω( M −1) / 2 H (e jω ) ,
π ≤ ω < 2π. Hence,
⎧ H (e j 2 πk / M ) e − j 2 πk ( M −1) / 2 M ,
d
⎪
H[ k ] = ⎨
⎪ H d (e j 2πk / M ) e − j 2 π ( M − k )( M −1) / 2 M
⎩
k = 0,1, 2,K,
k=
M −1
,
2
M +1 M + 3
,
, K , M − 1.
2
2
(b) For the Type 2 FIR filter
M −1
⎧ H (e j 2πk / M ) e − j 2πk ( M −1) / 2 M ,
,
k = 0,1, 2,K,
d
⎪
2
⎪
M
H[ k ] = ⎨
0,
k= ,
2
⎪
M
j
k
M
j
M
k
M
M
π
−
π
−
−
2
/
2
(
)(
1
)
/
2
)e
, k = + 1,K, M − 1.
⎪ H d (e
2
⎩
10.33 (a) ω p = 0.55π = 1.72788. The frequency spacing between 2 consecutive DFT samples
is given by
ω = 2π
2π
19
5
and
19
= 0.3307. The desired passband edge is between the frequency samples at
ω = 2π
6
.
19
Therefore, the 19-point DFT is given by
Not for sale
350
⎧e − j (2 π / 19) 9k , k = 0,1,K,5,13,14,K,18,
H[k ] = ⎨
0,
k = 6,K,12.
⎩
A 19-point IDFT of the above DFT samples yields the impulse response coefficients
given below in ascending powers of z −1 :
Columns 1 through 10
-0.0037
-0.0022
0.0224
-0.0316
-0.1128
0.2888
-0.0211
0.6316
Columns 11 through 19
0.2888
-0.1128
-0.0316
0.0224
-0.0022
-0.0037
0.0674
-0.0231
-0.0231
0.0674
-0.0211
(b)
Magnitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
% Problem #10.33
close all;
clear;
clc;
ind = 1;
for k = 0:5,
H(ind) = exp(-i*2*pi*9*k/19);
ind = ind + 1;
end
for k = 6:12,
H(ind) = 0;
ind = ind + 1;
end
for k = 13:18,
H(ind) = exp(-i*2*pi*9*k/19);
ind = ind + 1;
end
h = ifft(H);
figure(1);
stem(real(h));
[FF, w] = freqz(h, 1, 512);
Not for sale
351
figure(2);
plot(w/pi, abs(FF)); axis([0 1 0 1.2]);grid;
ylabel('Gain, in dB'); xlabel('\omega/\pi');
10.34 (a) ω p = 0.35π = 1.09956. The frequency spacing between 2 consecutiveDFT samples
is given by
2π
39
= 0.1611. The desired passband edge is between the frequency samples
6
7
and ω = 2π . Therefore, the 39-point DFT is given by
39
39
⎧e − j (2 π / 39)19 k , k = 0,1,K,6, 32, 33,K,38,
at ω = 2π
H[k ] = ⎨
0,
k = 7,K,31.
⎩
A 39-point IDFT of the above DFT samples yields the impulse response coefficients
given below in ascending powers of z −1 :
Columns 1 through 10
0.0006
0.0031
0.0017
0.0128
0.0146
-0.0034
-0.0054
-0.0237
Columns 11 through 20
-0.0192
0.0134
0.0405
-0.0249
0.1222
0.2870
Columns 21 through 30
0.2870
0.1222
-0.0249
0.0405
0.0134
-0.0192
-0.0091
0.0227
0.3590
-0.0753
-0.0237
Columns 31 through 39
-0.0034
0.0146
0.0128
0.0017
0.0031
0.0006
-0.0362
-0.0362
-0.0010
-0.0091
-0.0010
-0.0753
0.0227
-0.0054
(b)
Magnitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
% Problem #10.34
close all;
clear;
clc;
ind = 1;
for k = 0:6,
Not for sale
352
H(ind) = exp(-i*2*pi*19*k/39);
ind = ind + 1;
end
for k = 7:31,
H(ind) = 0;
ind = ind + 1;
end
for k = 32:38,
H(ind) = exp(-i*2*pi*19*k/39);
ind = ind + 1;
end
h = ifft(H);
figure(1);
stem(real(h));
[FF, w] = freqz(h, 1, 512);
figure(2);
plot(w/pi, abs(FF)); axis([0 1 0 1.2]); grid;
xlabel('\omega/\pi'); ylabel('Gain, dB');
10.35 By expressing cos(ωn) = Tn (cos ω), where Tn (x ) Tn(x) is the n -th order Chebyshev
polynomial in x, we first rewrite Eq. (10.48) in the form:
M
M
(
H (ω) =
a[ n] cos(ωn) =
α n cos n (ω).
∑
∑
n=0
n=0
Therefore, we can rewrite Eq. (10.70) repeated below for convenience
P(ωi )[H (ωi ) − D(ωi )] = (−1)i ε, 1 ≤ i ≤ M + 2,
in a matrix form as
⎡1
⎤ ⎡ α 0 ⎤ ⎡ D(ω1 ) ⎤
cos(ω1 )
cos M (ω1 )
1 / P (ω1 )
L
⎢
⎥⎢
⎥
⎥ ⎢
L
− 1 / P (ω2 )
cos(ω2 )
cos M (ω2 )
⎢1
⎥ ⎢ α1 ⎥ ⎢ D(ω2 ) ⎥
⎢M
⎥⎢ M ⎥ = ⎢
⎥.
M
O
M
M
⎢
⎥
⎢
⎥
⎢
⎥
(−1) M / P (ω M + 1 ) ⎥ ⎢α M ⎥ ⎢ D(ω M + 1 ) ⎥
⎢1 cos(ω M + 1 ) L cos M (ω M + 1 )
⎢1 cos(ω
⎥⎢
M
M + 1 / P (ω
⎥
⎥ ⎢
M + 2 ) L cos (ω M + 2 ) ( −1)
M + 2 )⎦ ⎣ ε ⎦ ⎣ D(ω M + 2 )⎦
⎣
Note that the coefficients {αi } are different from the coefficients {a[i ]} of Eq. (10.70). To
determine the expression of
1
1
∆ = det M
1
1
we use Cramer's rule arriving at
, where
L
cos M (ω1 )
1 / P (ω1 )
M
L
− 1 / P (ω2 )
cos(ω2 )
cos (ω2 )
, and
M
O
M
M
cos(ω M +1 ) L cos M (ω M +1 )
(−1) M / P (ω M + 1 )
cos(ω M + 2 ) L cos M (ω M + 2 ) (−1) M + 1 / P (ω M + 2 )
cos(ω1 )
Not for sale
353
L
D(ω1 )
cos M (ω1 )
L
D(ω2 )
cos(ω2 )
cos M (ω2 )
..
M
O
M
M
cos(ω M + 1 ) L cos M (ω M + 1 ) D(ω M + 1 )
cos(ω M + 2 ) L cos M (ω M + 2 ) D(ω M + 2 )
cos(ω1 )
1
1
∆ε = M
1
1
Expanding both determinants using the last column we get ∆ ε =
M +2
∑ bi D(ωi +1 ) and
i =1
M +2
(−1) i −1
i =1
P(ωi )
∑ bi
∆=
1
1
M
bi = det 1
1
, where
cos(ω1 )
cos(ω2 )
cos 2 (ω1 )
cos 2 (ω2 )
L
L
cos M (ω1 )
cos M (ω2 )
M
cos(ωi −1 )
cos(ωi + 1 )
M
cos 2 (ωi −1 )
cos 2 (ωi + 1 )
O
L
L
cos M (ωi −1 )
cos M (ωi + 1 )
M
.
M
M
M
O
M
1 cos(ω M + 2 ) cos 2 (ω M + 2 ) L cos M (ω M + 2 )
The above matrix is seen to be a Vandermonde matrix and is determinant is given by
∏ (cos ωk − cos ωl ).
bi =
k ≠ l, k > l
k, l ≠ i
ci =
bi
Define ci =
. It can be shown by induction that
M +2
br
∏
r =1
r ≠i
M +2
∏ cos ωi − cos ωn . Therefore,
1
n =1
n≠i
M +2
∑ bi D(ωi )
c D(ω1 ) + c2 D(ω2 ) + L + c M + 2 D(ω M + 2 )
= 1
.
M +2
c1
c2
c M + 2 (−1) M + 1
(−1) i
−
+L+
bi
P(ω1 ) P(ω2 )
P (ω M + 2 )
P
(
ω
)
i
i =1
ε = i =1
∑
10.36
⎧ 1
⎪
W (ω) = ⎨ δ p
⎪δ
⎩ s
ω ∈ passband,
ω ∈ stopband.
⎧ 1 0 ≤ ω ≤ 0.45π,
W (ω) = ⎨
⎩4.5 0.55π ≤ ω ≤ π.
Not for sale
354
⎧ 1
⎪
10.37 W (ω) = ⎨ δ p
⎪δ
⎩ s
ω ∈ passband,
⎧ 1 0 ≤ ω ≤ 0.55π,
W (ω) = ⎨
⎩3.4 0.7π ≤ ω ≤ π.
ω ∈ stopband.
⎧ δp
⎪
⎪⎪ δs1
10.38 W (ω) = ⎨ 1
⎪ δp
⎪
⎪⎩ δs 2
0 ≤ ω ≤ ωs1 ,
0 ≤ ω ≤ 0.44π,
⎧1.43
⎪
ω p1 ≤ ω ≤ ω p2 , = ⎨ 1
0.55π ≤ ω ≤ 0.7π,
⎪ 5
0.82π ≤ ω ≤ π.
⎩
ωs 2 ≤ ω ≤ π ,
10.39 It follows from Eq. (10.22) that the impulse response of an ideal Hilbert transformer is an
antisymmetric sequence. If we truncate it to a finite number of terms between − M ≤ n ≤ M
the impulse response is of length (2 M + 1) which is odd. Hence the FIR Hilbert transformer
obtained by truncation and satisfying Eq. (10.90) cannot be satisfied by a Type 4 FIR filter.
10.40 (a) X ( z) =
N −1
∑ x[n] z − n .
Thus,
n=0
(
(
X ( z ) = X ( z ) z −1 = − α + z −1 =
(
1− αz −1
(
P( z ) =
(
D( z ) =
N −1
⎛ − α + z( −1 ⎞ P ( z( )
⎟
x[ n]⎜⎜
( −1 ⎟ = D( z( ) , where
1
α
z
−
⎠
⎝
n=0
∑
N −1
∑ p[n] z( −1 = ∑ x[n](1 − αz( −1 ) N −1− n (−α + z( −1 ) n ,
and
n=0
N −1
∑ d[n]z( − n = (1 − αz( −1 ) N −1.
n=0
(
(
P( z )
(
(b) X[ k ] = X ( z ) ( j 2 πk / N =
(
z =e
D( z )
(
z = e j 2 πk / N
(
(
P[ k ]
(
= ( , where P[ k ] = P ( z ) z( = e j 2 πk / N is
D[ k ]
(
(
the N -point DFT of the sequence p[n] and D[ k ] = D( z ) z( = e j 2 πk / N is the N -point DFT
of the sequence d[n].
(c) Let P = [ p[0]
p[1] L p[ N − 1]]T and X = [x[0] x[1] L x[ N − 1]]T . Without
(
any loss of generality, assume N = 4 in which case P( z ) =
(
)
(
+ (− 3αx[ 0] + (1 + 2α 2 ) x[1] − α (2 + α 2 ) x[ 2] + 3α 2 x[3])z −1
(
+ (3α 2 x[ 0] − α(2 + α 2 ) x[1] + (1 + 2α 2 ) x[ 2] − 3α x[3])z − 2
=
3
∑ p[n] z( − n
n=0
x[ 0] − α x[1] + α 2 x[ 2] − α 3 x[3]
Not for sale
355
(
)
(
(
+ − α 3 x[ 0] + α 2 x[1] − α x[ 2] + α x[3] z − 3 . Equating like powers of z −1 we can write
P = Q ⋅ X, where P = [ p[0]
⎡ 1
⎢
− 3α
Q=⎢
⎢ 3α 2
⎢ 3
⎢⎣ − α
p[1] p[2] p[3]]T , X = [x[0] x[1] x[2] x[3]]T and
α2
−α
− α3 ⎤
⎥
− α(2 + α 2 ) 3α 2 ⎥
1 + 2α 2
.
− α (2 + α 2 )
− 3α ⎥
1 + 2α 2
⎥
α2
− α2
1 ⎥⎦
It can be seen that the elements q r , s , 0 ≤ r , s ≤ 3, q r,s , of the 4 4 matrix Q can be
determined as follows:
(i) The first row is given by q 0, s = (− α ) s ,
3!
(−α ) r , and
r! (3 − r )!
(iii) the remaining elements can be obtained using the recurrence relation
q r , s = qr −1, s −1 − αq r , s −1 + αq r −1, s .
In the general case, we only change the computation of the elements of the first column
( N − 1)!
(−α )r .
using the relation qr ,0 = N −1C r (− α ) r =
r! ( N − 1 − r )!
(ii) The first column is given by qr ,0 = 3C r (−α ) r =
M10.1 The impulse response coefficients of the truncated FIR highpass filter with cutoff
frequency at 0.4π can be generated using the following MATLAB statements:
n = -M:M;
num = -0.4*sinc(0.4*n);
num(M+1) = 0.6;
The magnitude responses of the truncated FIR highpass filter for two values of M are
shown below:
Magnitude
1
0.8
0.6
0.4
M=5
M=20
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
356
M10.2 The impulse response coefficients of the truncated FIR bandpass filter with cutoff
frequencies at 0.7π and 0.3π can be generated using the following MATLAB statements:
n = -M:M;
num = 0.7*sinc(0.7*n) - 0.3*sinc(0.3*n);
The magnitude responses of the truncated FIR bandpass filter for two values of M are shown
below:
Magnitude
1
0.8
0.6
0.4
M=5
M=20
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
M10.3 The impulse response coefficients of the truncated Hilbert transformer can be generated
using the following MATLAB statements:
n = 1:M;
c = 2*sin(pi*n/2).*sin(pi*n/2);b = c./(pi*n);
num = [-fliplr(b) 0 b];
The magnitude responses of the truncated Hilbert transformer for two values of M are
shown below:
Magnitude
1
0.8
0.6
0.4
M=5
M=20
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
M10.4
% Problem #M10.4
% Cascade of 2 boxcar filters of length 4
K = 2;N = 4;b = firgauss(K,N);
figure(1);
stem(b);xlabel(‘n’);ylabel(‘h[n]’);
title('Cascade of 2 boxcar filters of length 4');
Not for sale
357
% Cascade of 4 boxcar filters of length 4
K = 4;N = 4;b = firgauss(K,N);
figure(2);
stem(b);xlabel(‘n’);ylabel(‘h[n]’);
title('Cascade of 4 boxcar filters of length 4');
% Cascade of 2 boxcar filters of length 12
K = 2;N = 12;b = firgauss(K,N);
figure(3);
stem(b);xlabel(‘n’);ylabel(‘h[n]’);
title('Cascade of 2 boxcar filters of length 12');
% Cascade of 4 boxcar filters of length 12
K = 4;N = 12;b = firgauss(K,N);
figure(4);
stem(b);xlabel(‘n’);ylabel(‘h[n]’);
title('Cascade of 4 boxcar filters of length 12');
Cascade of 2 boxcar filters of length 4
Cascade of 4 boxcar filters of length 4
4
50
40
3
h[n]
h[n]
30
2
1
0
20
10
1
2
3
4
n
5
6
0
7
0
5
10
1000
8
800
6
600
4
400
2
200
0
5
10
15
Cascade of 4 boxcar filters of length 12
1200
h[n]
h[n]
Cascade of 2 boxcar filters of length 12
12
0
10
n
15
20
25
0
0
n
10
20
30
40
50
n
We can see that by increasing either K or N, the approximation to a Gaussian function
gets better. It is noted that increasing the number of boxcar filters K to a number greater
than 3 greatly affects the Gaussian shape of the impulse response.
M10.5 % Problem #M10.05
N = 36;fc = 0.2*pi;
M = N/2;
n = -M:1:M;t = fc*n;
lp = fc*sinc(t);
Not for sale
358
b = 2*[lp(1:M) (lp(M+1) - 0.5) lp((M+2):N+1)];
bw = b.*hamming(N+1)';
[h2, w] = freqz(bw, 1, 512);
plot(w/pi, abs(h2));axis([0 1 0 1.2]);
xlabel('\omega/\pi');ylabel('Magnitude');
title(['\omega_c = ', num2str(fc), ', N = ', num2str(N)]);
ωc = 0.62832, N = 36
Magnitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.6 D( x) = 3.2 x 2 + 4.05 x − 5.5. Its approximation over the range − 3 ≤ x ≤ 2 is given by
A( x) = a0 + a1 x. We want to minimize the peak value of the absolute error, i.e.,
minimize max 3.2 x 2 + 4.05 x − 5.5 − a0 − a1 x . Since there are 3 unknowns, a0 , a1 ,
− 3≤ x ≤ 2
and ε, we need 3 extremal points on x , which we arbitrarily choose as x1 = −3, x2 = 0,
and x3 = 2. We then solve the 3 linear equations: a0 + a1 x − ( −1) l ε = D ( xl ), l = 1, 2, 3.
⎡1 − 3 1 ⎤ ⎡a0 ⎤ ⎡11.15⎤
This leads to ⎢1 0 − 1⎥ ⎢ a1 ⎥ = ⎢ − 5.5 ⎥, whose solution yields a0 = 4.1, a1 = 0.85,
1 ⎥⎦ ⎢ ε ⎥ ⎢⎣ 15.4 ⎥⎦
⎢⎣1 2
⎣ ⎦
and ε = 9.6. A plot of the corresponding error E1 ( x) = 3.2 x 2 + 3.2 x − 9.6 is shown
below in Figure (c).
Result of second guess
10
10
5
5
Error
Error
Result of first guess
0
0
-5
-5
-10
-10
-3
-2
-1
0
1
2
x
-3
-2
-1
0
1
2
x
(c)
(d)
Not for sale
359
After looking at E1 (x) , we move the second extremal point x2 to the location where
E1 (x) is a minimum. The next extrtemal points are therefore given by x1 = −3,
x2 = −0.5, and x3 = 2. The new values of the unknowns are obtained by solving
1 ⎤ ⎡a0 ⎤ ⎡ 11.15 ⎤
⎡1 − 3
⎢1 − 0.5 − 1⎥ ⎢ a1 ⎥ = ⎢− 6.725⎥, which yields a0 = 3.7, a1 = 0.85, and ε = 10. A plot
2
1 ⎥⎦ ⎢ ε ⎥ ⎢⎣ 15.4 ⎥⎦
⎢⎣1
⎣ ⎦
of the corresponding error E 2 ( x) = 3.2 x 2 + 3.2 x − 9.2 is shown on the previous page in
Figure (d).
%
x
d
D
A
C
Problem #M10.06
= [-3 0 2];
= 3.2.*x.^2 + 4.05.*x-5.5;
= d';
= [1 -3 1;1 0 -1;1 2 1];
= inv(A)*D;
y = -3:0.05:2;
E = 3.2.*y.^2 + 4.05.*y - 5.5 - C(1) - C(2).*y;
% Results of first guess
figure(1);
plot(y,E);
axis([-3 2 -12 12]);
xlabel('x');
ylabel('Error');
title('Result of first guess');
hold on;
plot([-3 -3], [E(1) E(1)], 'o');
plot([2 2], [E(end) E(end)], 'o');
plot([0 0], [E(61) E(61)], 'o');
hold off;
x
d
D
A
C
=
=
=
=
=
[-3 -0.5 2];
3.2.*x.^2 + 4.05.*x-5.5;
d';
[1 -3 1;1 -0.5 -1;1 2 1];
inv(A)*D;
y = -3:0.05:2;
E = 3.2.*y.^2 + 4.05.*y - 5.5 - C(1) - C(2).*y;
% Results of second guess
figure(2);
plot(y,E);
axis([-3 2 -12 12]);
xlabel('x');
ylabel('Error');
Not for sale
360
title('Result of second guess');
hold on;
plot([-3 -3], [E(1) E(1)], 'o');
plot([2 2], [E(end) E(end)], 'o');
plot([-0.5 -0.5], [E(51) E(51)], 'o');
hold off;
M10.7 D(x ) = −5 x 3 − 0.2 x 2 + 8 x + 5.5 . Its approximation over the range − 2 ≤ x ≤ 2 is given by
A( x) = a0 + a1 x + a2 x 2 . We want to minimize the peak value of the absolute error, i.e.,
minimize max − 5 x 3 − 0.2 x 2 + 8 x + 5.5 − a0 − a1 x − a2 x 2 . Since there are 4
−2≤ x≤2
unknowns, a0 , a1 , a2 , and ε, we need 4 extremal points on x , which we arbitrarily
choose as x1 = −2, x2 = −1, x3 = 1, and x4 = 2. We then solve the 4 linear equations:
a0 + a1 x + a 2 x 2 − ( −1) l ε = D ( xl ), l = 1, 2, 3, 4. This leads to
⎡1 − 2 4 1 ⎤ ⎡a0 ⎤ ⎡ 28.7 ⎤
⎢1 − 1 1 − 1⎥ ⎢ a1 ⎥ = ⎢ 2.3 ⎥, whose solution yields a = 5.5, a = −7, a = −0.2,
0
1
2
⎢1 1 1 1 ⎥ ⎢a2 ⎥ ⎢ 8.3 ⎥
⎢
⎥
−
1
2
4
1
19
3
−
.
⎣⎢
⎦⎥ ⎣ ε ⎦ ⎣⎢
⎦⎥
and ε = 10. A plot of the corresponding error E1 ( x) = −5 x 3 + 15 x is shown below in
Figure (e). We observe that these values maximize the error (ε = 10).
Result of first guess
10
Error
5
0
-5
-10
-2
%
x
d
D
A
C
-1
0
x
1
2
Problem #M10.07
= [-2 -1 1 2];
= -5.*x.^3 - 0.2.*x.^2 + 8.*x + 5.5;
= d';
= [1 -2 4 1;1 -1 1 -1;1 1 1 1;1 2 4 -1];
= inv(A)*D;
y = -2:0.05:2;
E = -5.*y.^3 - 0.2.*y.^2 + 8.*y + 5.5 - C(1) - C(2).*y C(3).*y.^2;
% Results of first guess
figure(1);
Not for sale
361
plot(y,E);
axis([-2 2 -12 12]);
xlabel('x');
ylabel('Error');
title('Result of first guess');
hold on;
plot([-2 -2], [E(1) E(1)], 'o');
plot([2 2], [E(end) E(end)], 'o');
plot([-1 -1], [E(21) E(21)], 'o');
plot([1 1], [E(1) E(1)], 'o');
hold off;
8π
12π
10π
, ωs =
, ωT =
18
18
18
% Problem #M10.8
wp = 4*(2*pi)/18;
ws = 6*(2*pi)/18;
wc = (wp + ws)/2;
dw = ws - wp;
% Hamming
M = ceil(3.32*pi/dw);N = 2*M+1;n = -M:M;
num = (6/18)*sinc(6*n/18);
wh = hamming(N)';b = num.*wh;
M10.8 ω p =
figure(1);
k=0:2*M:stem(k,b);
title('Impulse Response Coefficients');
xlabel('Time index n'); ylabel('Amplitude');
figure(2);
[h, w] = freqz(b,1,512);
plot(w/pi, 20*log10(abs(h))); grid;
xlabel('\omega/\pi'); ylabel('Gain, in dB');
title('Lowpass filter designed using Hamming window');
axis([0 1 -80 10]);
% Hann
M = ceil(3.11*pi/dw);N = 2*M+1;n = -M:M;
num = (6/18)*sinc(6*n/18);
wh = hann(N)';b = num.*wh;
figure(3);
k=0:2*M:stem(k,b);
title('Impulse Response Coefficients');
xlabel('Time index n'); ylabel('Amplitude');
figure(4);
[h, w] = freqz(b,1,512);
plot(w/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi');ylabel('Gain, in dB');
Not for sale
362
title('Lowpass filter designed using Hann window');
axis([0 1 -80 10]);
% Blackman
M = ceil(5.56*pi/dw);N = 2*M+1;n = -M:M;
num = (6/18)*sinc(6*n/18);
wh = blackman(N)';b = num.*wh;
figure(5);
k=0:2*M:stem(k,b);
title('Impulse Response Coefficients');
xlabel('Time index n'); ylabel('Amplitude');
figure(6);
[h, w] = freqz(b,1,512);
plot(w/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi');ylabel('Gain, in dB');
title('Lowpass filter designed using Blackman window');
axis([0 1 -80 10]);
Lowpass filter design using Hamming window: N = 31
Lowpass filter designed using Hamming window
Impulse Response Coefficients
0.4
0
Gain, in dB
Amplitude
0.3
0.2
0.1
-40
-60
0
-0.1
-20
-80
0
5
10
15
20
Time index n
25
30
0
0.2
0.4
0.6
0.8
1
ω/π
Lowpass filter design using Hann window: N = 29
Impulse Response Coefficients
Lowpass filter designed using Hann window
0.3
0
0.2
-20
Gain, in dB
Magnitude
0.4
0.1
0
-0.1
-40
-60
0
5
10
15
20
Time index n
25
-80
0
0.2
0.4
0.6
0.8
1
ω/π
Lowpass filter design using Blackman window: N = 53
Not for sale
363
Lowpass filter designed using Blackman window
0.3
0
0.2
-20
Gain, in dB
Magnitude
Impulse Response Coefficients
0.1
-60
0
-0.1
-40
0
10
20
30
Time index n
40
-80
50
0
0.2
0.4
0.6
0.8
1
ω/π
Comments: The Hann window method results in using the lowest filter order. All filters
meet the requirements of the specifications.
M10.9 α s = 42 , β = 0.5842(42 − 21)0.4 + 0.07886(42 − 21) = 3.631 using Eq. (10.41).
42 − 8
N=
using Eq. (10.42).
⎛ 2π ⎞
2.285⎜ ⎟
⎝ 18 ⎠
N = 42.627 ≥ 43 and we choose 44 since N must be even. M = 22.
% Problem #M10.9
beta = 3.631;N = 44;n = -N/2:N/2;
num = (6/18)*sinc(6*n/18);
wh = kaiser(N+1,beta)';b = num.*wh;
figure(1);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('Amplitude')
figure(2);
[h, w] = freqz(b,1,512);
plot(w/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi');ylabel('Gain, in dB');
title('Lowpass filter designed using Kaiser window');
axis([0 1 -80 10]);
Impulse Response Coefficients
Lowpass filter designed using Kaiser window
0.4
0
Gain, in dB
Amplitude
0.3
0.2
0.1
-40
-60
0
-0.1
-20
0
10
20
30
Time index n
40
-80
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
364
M10.10 ω p = 0.4π , ω s = 0.6π , α s = 42 dB, ω c = 0.5π , ∆ω = 0.2π
We will use the Hann window since it meets the requirements and has the lowest order
from Table 10.2.
3.11π
M=
= 15.55 → 16 ⇒ N = 32.
∆ω
% Problem M10.10
n = -16:16;
lp = 0.5*sinc(0.5*n);wh = hanning(33);
b = lp.*wh';
figure(1);
k=0:2*n;stem(k,b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel(‘Amplitude');
figure(2);
[h, w] = freqz(b,1,512);
plot(w/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi');ylabel('Gain, in dB');
title('Lowpass filter designed using Hann window');
axis([0 1 -80 10]);
Impulse Response Coefficients
Lowpass filter designed using Hann window
0
0.5
Gain, in dB
Amplitude
0.4
0.3
0.2
0.1
-20
-40
-60
0
-0.1
0
5
10
15
20
Time index n
25
30
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.11 We use the same specifications from Problem M10.10, but we use the Dolph-Chebyshev
2.056(42 ) − 16.4
= 48.7 . We use N = 50, which is a much higher order
window. N =
2.285(0.2π )
than in Problem M10.10.
% Problem M10.11
n = -25:25;
lp = 0.5*sinc(0.5*n);wh = chebwin(51,42);
b = lp.*wh';
figure(1);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('Amplitude');
figure(2);
[h, w] = freqz(b,1,512);
Not for sale
365
plot(w/pi, 20*log10(abs(h)));grid;
xlabel('\omega/\pi');ylabel('Magnitude');
title('Filter designed using Dolph-Chebyshev window');
axis([0 1 -80 10]);
Impulse Response Coefficients
Filter designed using Dolph-Chebyshev window
0.6
0
Magnitude
Amplitude
0.4
0.2
0
-0.2
-20
-40
-60
0
10
20
30
Time index n
40
-80
50
0
0.2
0.4
0.6
0.8
1
ω/π
M10.12 n = -16:16;
b = fir1(32, 0.5, hanning(33));
figure(1);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('Amplitude');
figure(2);
[h, w] = freqz(b,1,512);
plot(w/pi, 20*log10(abs(h)));
grid;
xlabel('\omega/\pi');ylabel('Magnitude');
title(' Lowpass filter designed using Hann window');
axis([0 1 -80 10]);
Impulse Response Coefficients
Lowpass filter designed using Hann window
0.6
0
Magnitude
Amplitude
0.4
0.2
0
-0.2
-20
-40
-60
0
5
10
15
20
Time index n
25
30
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.13 N = 35;
for k = 1:N+1,
w(k) = 2*pi*(k-1)/(N+1);
if(w(k) >= 0.45*pi & w(k) <= 1.45*pi) H(k) = 1;
else H(k) = 0;
end
if (w(k) <= pi) phase(k) = i*exp(-i*w(k)*N/2);
else phase(k) = -i*exp(i*(2*pi-w(k))*N/2);
Not for sale
366
end
end
H = H.*phase;
f = ifft(H);
[FF, w] = freqz(f, 1, 512);
k = 0:N;
figure(1);
stem(k, real(f));
xlabel('Time index n');ylabel('Amplitude');
figure(2);
plot(w/pi,20*log10(abs(FF)));grid
xlabel('\omega/\pi');ylabel('Gain, dB');
axis([0 1 -50 5]);
0.5
0
Gain, dB
Amplitude
-10
0
-20
-30
-40
-0.5
0
5
10
15
20
25
Time index n
30
35
-50
0
0.2
0.4
0.6
0.8
1
ω/π
M10.14 N = 45;
L = N + 1;
for k = 1:L,
w = 2*pi*(k-1)/L;
if (w >= 0.5*pi & w <= 0.7*pi) H(k) = i*exp(-i*w*N/2);
elseif (w >= 1.3*pi & w <= 1.5*pi) H(k) = i*exp(i*(2*pi-w)*N/2);
else H(k) = 0;
end
end
f = ifft(H);
[FF, w] = freqz(f, 1, 512);
k = 0:N;
figure(1);
stem(k, real(f));
xlabel('Time index, n');ylabel('h[n]');
figure(2);
plot(w/pi, 20*log10(abs(FF)));grid;
ylabel('Gain, dB');xlabel('\omega/\pi');
axis([0 1 -50 5]);
Not for sale
367
0.2
0
-10
Gain, dB
h[n]
0.1
0
-0.1
-0.2
-20
-30
-40
0
10
20
30
Time index, n
-50
40
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.15 ind = 1;
for k = 0:6,
H(ind) = exp(-i*2*pi*19*k/39);
ind = ind + 1;
end
k = 7;
H(ind) = 0.5*exp(-i*2*pi*19*k/39);
ind = ind + 1;
for k = 8:30,
H(ind) = 0;
ind = ind + 1;
end
k = 31;
H(ind) = 0.5*exp(-i*2*pi*19*k/39);
ind = ind + 1;
for k = 32:38,
H(ind) = exp(-i*2*pi*19*k/39);
ind = ind + 1;
end
h = ifft(H);
[FF, w] = freqz(h, 1, 512);
plot(w/pi, 20*log10(abs(FF)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
axis([0 1 -50 5]);
0
Gain, dB
-10
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.16 ind = 1;
Not for sale
368
for k = 0:6,
H(ind) = exp(-i*2*pi*19*k/39);
ind = ind + 1;
end
k = 7;
H(ind) = (2/3)*exp(-i*2*pi*19*k/39);
ind = ind + 1;
k = 8;
H(ind) = (1/3)*exp(-i*2*pi*19*k/39);
ind = ind + 1;
for k = 9:29,
H(ind) = 0;
ind = ind + 1;
end
k = 30;
H(ind) = (1/3)*exp(-i*2*pi*19*k/39);
ind = ind + 1;
k = 31;
H(ind) = (2/3)*exp(-i*2*pi*19*k/39);
ind = ind + 1;
for k = 32:38,
H(ind) = exp(-i*2*pi*19*k/39);
ind = ind + 1;
end
h = ifft(H);
[FF, w] = freqz(h, 1, 512);
plot(w/pi, 20*log10(abs(FF)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
axis([0 1 -50 5]);
0
Gain, dB
-10
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
ω/π
8π
12π
10π
4π
, ωs =
, ωc =
, ∆ω =
18
18
18
18
wp = 4*(2*pi)/18;
ws = 6*(2*pi)/18;
wc = (wp + ws)/2;
dw = ws - wp;
% Hamming
M = ceil(3.32*pi/dw);
N = 2*M;
b = fir1(N, ws/(2*pi));
M10.17 ω p =
Not for sale
369
[H, w] = freqz(b,1,512);
figure(1);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(2);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Lowpass filter designed using Hamming window');
axis([0 1 -80 10]);
% Hann
M = ceil(3.11*pi/dw);
N = 2*M;
b = fir1(N, ws/(2*pi), hanning(N+1));
[H, w] = freqz(b,1,512);
figure(3);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(4);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Lowpass filter designed using Hann window');
axis([0 1 -80 10]);
% Blackman
M = ceil(5.56*pi/dw);
N = 2*M;
b = fir1(N, ws/(2*pi), blackman(N+1));
[H, w] = freqz(b,1,512);
figure(5);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(6);
plot(w/pi, 20*log10(abs(H)));
grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Lowpass filter designed using Blackman window');
axis([0 1 -80 10]);
% Kaiser
beta = 3.631;
N = 44;
b = fir1(N, ws/(2*pi), kaiser(N+1, beta));
[H, w] = freqz(b,1,512);
figure(7);
stem(b);
title('Impulse Response Coefficients');
Not for sale
370
xlabel('Time index n');ylabel('h[n]');
figure(8);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Lowpass filter designed using Kaiser window');
axis([0 1 -80 10]);
(a) Hamming window using fir1
Impulse Response Coefficients
Lowpass filter designed using Hamming window
0.4
0
Gain, dB
0.3
0.1
-0.1
-20
-40
-60
0
0
5
10
15
20
Time index n
25
-80
30
0
0.2
0.4
0.6
0.8
1
ω/ π
(b) Hann window using fir1
Lowpass filter designed using Hann window
Impulse Response Coefficients
0.4
0
Gain, dB
0.3
h[n]
0.2
0.1
-0.1
-20
-40
-60
0
0
5
10
15
20
Time index n
-80
25
0
0.2
0.4
0.6
0.8
1
ω/ π
(c) Blackman window using fir1
Impulse Response Coefficients
Lowpass filter designed using Blackman window
0.4
0
Gain, dB
0.3
0.2
h[n]
h[n]
0.2
0.1
-40
-60
0
-0.1
-20
0
10
20
30
Time index n
40
50
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
(d) Kaiser window using fir1
Not for sale
371
Impulse Response Coefficients
Lowpass filter designed using Kaiser window
0.4
0
Gain, dB
0.3
h[n]
0.2
0.1
-40
-60
0
-0.1
-20
0
10
20
30
Time index n
40
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.18 ω s = 0.4π , ω p = 0.55π , α p = 0.1 dB, α s = 42 dB, ∆ω = 0.15π , ωc = 0.475π
3.32 π
(a) Hamming: use Eq. (10.33): M =
= 22.133 → 23 ∴ N = 2 M = 46
0.15π
3.11π
(b) Hann: M =
= 20.733 → 21 ∴ N = 2 M = 42
0.15π
5.56 π
(c) Blackman: M =
= 37.067 → 38 ∴ N = 2 M = 76
0.15π
(d) Kaiser: δ s = 10 −α s / 20 = 0.00794
% Hamming
N = 46;
b = fir1(N, 0.475, 'high');
[H,w] = freqz(b,1,512);
figure(1);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(2);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Highpass filter designed using Hamming window');
axis([0 1 -80 10]);
% Hann
N = 42;
b = fir1(N, 0.475, 'high', hanning(N+1));
[H,w] = freqz(b,1,512);
figure(3);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(4);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Highpass filter designed using Hann window');
axis([0 1 -80 10]);
Not for sale
372
% Blackman
N = 76;
b = fir1(N, 0.475, 'high', blackman(N+1));
[H,w] = freqz(b,1,512);
figure(5);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(6);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Highpass filter designed using Blackman window');
axis([0 1 -80 10]);
% Kaiser
ds = 0.00794;
[N,Wn,beta,type] = kaiserord([0.4 0.55],[1 0],[ds ds]);
b = fir1(N, 0.475,'high',kaiser(N+1,beta));
[H,w] = freqz(b,1,512);
figure(7);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(8);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Highpass filter designed using Kaiser window');
axis([0 1 -80 10]);
(a) Hamming window using fir1
Impulse Response Coefficients
Highpass filter designed using Hamming window
0.6
0
Gain, dB
0.4
h[n]
0.2
0
-40
-60
-0.2
-0.4
-20
0
10
20
30
Time index n
40
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
(b) Hann window using fir1
Not for sale
373
Impulse Response Coefficients
Highpass filter designed using Hann window
0.6
0
0.4
-20
Gain, dB
h[n]
0.2
0
-40
-60
-0.2
-0.4
0
10
20
30
Time index n
-80
40
0
0.2
0.4
0.6
0.8
1
ω/ π
(c) Blackman window using fir1
Highpass filter designed using Blackman window
Impulse Response Coefficients
0.6
0
Gain, dB
0.4
h[n]
0.2
0
-40
-60
-0.2
-0.4
-20
0
20
40
Time index n
-80
60
0
0.2
0.4
0.6
0.8
1
ω/ π
(d) Kaiser window using fir 1
Impulse Response Coefficients
Highpass filter designed using Kaiser window
0.4
0
0.2
-20
Gain, dB
h[n]
0.6
0
-0.2
-0.4
-40
-60
0
5
10
15
20
Time index n
25
30
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.19 ω p1 = 0.65π , ω p2 = 0.85π , ωs1 = 0.55π , ωs 2 = 0.75π , α p = 0.2 dB, α s = 42 dB
∆ω1 = ω p1 − ωs1 = 0.1π , ∆ω2 = ω p2 − ωs 2 = 0.1π = ∆ω
(a) Hamming window: M =
(b) Hann: M =
3.32π
= 33.2 → 34 ∴ N = 2 M = 68
0.1π
3.11π
= 31.1 → 32 ∴ N = 2 M = 64
0.1π
Not for sale
374
(c) Blackman: M =
5.56π
= 55.6 → 56 ∴ N = 2 M = 112
0.1π
− α / 20
(d) Kaiser: δs = 10 − α s / 20 = 0.00794 , δ p = 10 p
= 0.97724
% Problem #M10.19
% Hamming
N = 68;
b = fir1(N, [0.6 0.8]);
[H, w] = freqz(b,1,512);
figure(1);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(2);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Bandpass filter designed using Hamming window');
axis([0 1 -80 10]);
% Hann
N = 64;
b = fir1(N, [0.6 0.8], hanning(N+1));
[H, w] = freqz(b,1,512);
figure(3);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(4);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Bandpass filter designed using Hann window');
axis([0 1 -80 10]);
% Blackman
N = 112;
b = fir1(N, [0.6 0.8], blackman(N+1));
[H, w] = freqz(b,1,512);
figure(5);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(6);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Bandpass filter designed using Blackman window');
axis([0 1 -80 10]);
% Kaiser
[N, Wn, beta, type] = kaiserord([0.6 0.8], [1 0], [0.97724
0.00794]);
Not for sale
375
b = fir1(2*N, [0.6 0.8], kaiser(2*N+1, beta));
[H, w] = freqz(b,1,512);
figure(7);
stem(b);
title('Impulse Response Coefficients');
xlabel('Time index n');ylabel('h[n]');
figure(8);
plot(w/pi, 20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Bandpass filter designed using Kaiser window');
axis([0 1 -80 10]);
Hamming window using fir1
(a)
Bandpass filter designed using Hamming window
Impulse Response Coefficients
0.3
0
Gain, dB
0.2
h[n]
0.1
0
-40
-60
-0.1
-0.2
-20
0
10
20
30
40
Time index n
50
-80
60
0
0.2
Impulse Response Coefficients
0.8
1
Bandpass filter designed using Hann window
0.3
0.2
0
0.1
-20
Gain, dB
h[n]
0.6
ω/π
Hann window using fir1
(b)
0
-0.1
-0.2
(c)
0.4
-40
-60
0
10
20
30
40
Time index n
50
60
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
Blackman window using fir1
Not for sale
376
Impulse Response Coefficients
Bandpass filter designed using Blackman window
0.2
0
-20
Gain, dB
h[n]
0.1
0
-40
-0.1
-0.2
-60
0
20
40
60
80
Time index n
-80
100
0
0.2
0.4
0.6
0.8
1
ω/ π
Kaiser window using fir1
(d)
Impulse Response Coefficients
Bandpass filter designed using Kaiser window
0.3
0
Gain, dB
0.2
h[n]
0.1
0
-40
-60
-0.1
-0.2
-20
0
10
20
30
Time index n
-80
40
0
0.2
0.4
0.6
0.8
1
ω/ π
2π ⋅ 15
= 0.4286 π
70
% Problem #M10.20
N = 31;
d1 = fir1(N-1,0.4286);d2 = fir1(N-1,0.4286,'high');
[h1,w] = freqz(d1,1,512);h2 = freqz(d2,1,w);
plot(w/pi,20*log10(abs(h1)),'-r',w/pi,20*log10(abs(h2)),'-b');grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Crossover pair');
axis([0 1 -80 10]);
M10.20 ωc =
Crossover pair
Gain, dB
0
-20
-40
-60
-80
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
377
M10.21 ωc1 = 0.2494 , ωc 2 = 0.5442
% Problem #M10.21
N = 32;
d1 = fir1(N, 0.2494, hanning(33));
d2 = fir1(N, 0.5442, 'high', hanning(33));
d3 = -d1-d2;
d3(17) = 1-d1(17)-d2(17);
[h1,w] = freqz(d1,1,512);h2 = freqz(d2,1,w);h3 =
freqz(d3,1,w);
g1 = 20*log10(abs(h1))); g2 = 20*log10(abs(h2)));
g3 = 20*log10(abs(h3)));
plot(w/pi, g1,’—-b’,w/pi,g2,’-.g’,w/pi,g3,’-r’);grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Crossover triple');
axis([0 1 -80 10]);
Crossover triple
Gain, dB
0
-20
-40
-60
-80
0
0.2
0.4
0.6
0.8
1
ω/π
M10.22 % Problem #M10.22
fpts = [0 0.35 0.4 0.7 0.72 1];
mval = [0.2 0.2 1 1 0.6 0.6];
b = fir2(70, fpts, mval);
[H,w] = freqz(b,1,512);
figure(1);
plot(w/pi,abs(H));grid;
xlabel('\omega/\pi');ylabel('Magnitude');
title('Multilevel FIR filter');
axis([0 1 0 1.2]);
Multilevel FIR filter
Magnitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
Not for sale
378
M10.23 From Problem 10.36,
ω p = 0.45π , ω s = 0.6π , δ p = 0.2043 , δ s = 0.0454 and we assume that
0.45π ⋅ FT
= 0.45 and Fs = 0.6.
2π
α p = −20 log10 1 − δ p = 1.985 dB, α s = −20 log10 (δ s ) = 26.858 dB.
After obtaining the length N using ‘remezord’, the specifications of the filter were not
met. We increased N to 11 to meet the specifications.
% Program #M10.23
Ft = 2;Fp = 0.45;Fs = 0.6;
ds = 0.0454;dp = 0.2043;
F = [Fp Fs];A = [1 0];DEV = [dp ds];
[N,Fo,Ao,W] = remezord(F,A,DEV,Ft);
b = remez(N,Fo,Ao,W);
[H,w] = freqz(b,1,512);
figure(1);
plot(w/pi, 20*log10(abs(H)));
xlabel('\omega/\pi');ylabel('Gain, dB');title('N = 9');
%axis([0 0.45 -3 3]);
N = 11;
b = remez(N,Fo, Ao, W);
[H,w] = freqz(b,1,512);
figure(2);
plot(w/pi, 20*log10(abs(H)));
xlabel('\omega/\pi');ylabel(Gain, dB);title('N = 11');
FT = 2. Therefore, F p =
(
)
Using remezord, we get N = 9. The corresponding gain response is shown in Figure (e)
below:
N = 11
20
0
0
Gain, dB
Gain, dB
N=9
20
-20
-40
-60
-80
-20
-40
-60
0
0.2
0.4
0.6
0.8
1
-80
ω/ π
0
0.2
0.4
0.6
0.8
1
ω/ π
(e)
(f)
However, specifications are not met in the passband with this filter, so we increase N to
11. The corresponding gain response is shown in Figure (f) above. The specifications
are now met.
Not for sale
379
M10.24 From problem 10.37,
ω p = 0.7π , ω s = 0.55π , δ p = 0.03808 , δ s = 0.0112 and we assume that
0.7π ⋅ FT
= 0.7 and Fs = 0.55.
2π
α p = −20 log10 1 − δ p = 0.3372 dB, α s = −20 log10 (δ s ) = 39.016 dB.
Using ‘remezord’, we get an estimate of N = 20. However, using this order, the
specifications are not met in the stopband, so we need to increase N up to 23 to meet the
specifications.
% Program #M10.24
Ft = 2;Fp = 0.7;Fs = 0.55;
ds = 0.0112;dp = 0.03808;
F = [Fs Fp];A = [0 1];DEV = [ds dp];
[N,Fo,Ao,W] = remezord(F,A,DEV,Ft);
b = remez(N,Fo,Ao,W);
[H,w] = freqz(b,1,512);
figure(1);
plot(w/pi, 20*log10(abs(H)));
xlabel('\omega/\pi');ylabel('Gain, dB');title('N = 20');
N = 23;
b = remez(N,Fo,Ao,W);
[H,w] = freqz(b,1,512);
figure(2);
plot(w/pi,20*log10(abs(H)));
xlabel('\omega/\pi');ylabel('Gain,dB ');title('N = 23');
FT = 2. Therefore, F p =
(
)
N = 24
0
0
-20
-20
Gain, dB
Gain, dB
N = 20
-40
-60
-60
-80
-40
0
0.2
0.4
0.6
0.8
1
-80
0
0.2
0.4
0.6
0.8
1
ω/π
ω/ π
Note: As odd order symmetric FIR filters must have a gain of zero at the Nyquist
frequency. The order has been increased by one by remez.
M10.25 From Problem 10.38,
ω p1 = 0.55π , ω p 2 = 0.7π , ω s1 = 0.44 π , ω s 2 = 0.82π , δ p = 0.01 , δ s1 = 0.007 ,
(
)
δ s 2 = 0.002 . α p = −20 log10 1 − δ p = 0.087 dB,
Not for sale
380
α s1 = −20 log10 (δ s1 ) = 43 dB, α s 2 = −20 log10 (δ s 2 ) = 54 dB.
% Program #M10.25
Ft = 2;Fp1 = 0.55;Fp2 = 0.7;Fs1 = 0.44;Fs2 = 0.82;
ds1 = 0.007;ds2 = 0.002;dp = 0.01;
F = [Fs1 Fp1 Fp2 Fs2];A = [0 1 0];DEV = [ds1 dp ds2];
[N,Fo,Ao,W] = remezord(F,A,DEV,Ft);
b = remez(N,Fo,Ao,W);
[H, w] = freqz(b, 1, 512);
figure(1);
plot(w/pi,20*log10(abs(H)));grid;
xlabel('\omega/\pi');ylabel('Gain, dB');title('N = 39');
axis([0 1 -80 10]);
N = 41;
b = remez(N, Fo, Ao, W);
[H, w] = freqz(b, 1, 512);
figure(2);
plot(w/pi, 20*log10(abs(H)));
xlabel('\omega/\pi');ylabel('Gain, dB');title('N = 41');
axis([0 1 -80 10]);
Using remezord, we estimate the filter length to be N = 39. However, the minimum
stopband attenuation specifications are not met in both stopbands, so we increase N to 41
N = 41
0
0
-20
-20
Gain, dB
Gain, dB
N = 39
-40
-60
-60
-80
-40
0
0.2
0.4
0.6
0.8
1
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
ω/ π
.
M10.26 % Program #M10.26
b = remez(29, [0 1], [0 pi], 'differentiator');
[H, w] = freqz(b, 1, 512);
plot(w/pi,abs(H));grid
xlabel('\omega/\pi');ylabel('Magnitude');
axis([0 1 0 pi]);
The magnitude response of the differentiator is given below:
Not for sale
381
3
Magnitude
2.5
2
1.5
1
0.5
0
0
0.2
0.4
0.6
0.8
1
ω/π
M10.27 % Program #M10.27
f = [0.02 0.05 0.07 0.95 0.97 1];
m = [0 0 1 1 0 0];
wt = [1 60 1];
b = remez(30, f, m, wt, 'hilbert');
[H,w] = freqz(b,1,512);
plot(w/pi,abs(H));grid
xlabel('\omega/\pi');ylabel('Magnitude');
axis([0 1 0 1.2]);
The magnitude response of the Hilbert transformer is shown below:
Magnitude
1
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.28 ω p = 0.35π , ω s = 0.5π , R p = 1 dB, and Rs = 28 dB.
% Program #M10_28
% Design of a minimum-phase lowpass FIR filter
Wp = 0.35; Ws = 0.5; Rp = 1; Rs = 28;
% Desired ripple values of minimum-phase filter
dp = 1- 10^(-Rp/20); ds = 10^(-Rs/20);
% Compute ripple values of prototype linear-phase filter
Ds = (ds*ds)/(2 - ds*ds);
Dp = (1 + Ds)*((dp + 1)*(dp + 1) - 1);
% Estimate filter order
[N,fpts,mag,wt] = remezord([Wp Ws], [1 0], [Dp Ds]);
% Design the prototype linear-phase filter H(z)
[b,err,res] = remez(N,fpts,mag,wt);
K = N/2;
b1 = b(1:K);
Not for sale
382
% Design the linear-phase filter G(z)
lenerr= res.error(length(res.error));
c = [b1 (b(K+1) + lenerr)) fliplr(b1)]/(1+Ds);
zplane(c);title('Zeros of G(z)');pause
c1 = c(K+1:N+1);
[y, ssp, iter] = minphase(c1);
zplane(y);title(‘Zeros of the minimum-phase filter’);
pause
[hh,w] = freqz(y,1, 512);
% Plot the gain response of the minimum-phase filter
plot(w/pi, 20*log10(abs(hh)));grid
xlabel('\omega/\pi');ylabel('Gain, dB');
Zeros of G(z)
Zeros of the minimum-phase filter
1
Imaginary Part
Imaginary Part
2
1
2
0
20
-1
0.5
-0.5
-2
-6
10
0
-1
-4
-2
Real Part
0
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
20
Gain, dB
0
-20
-40
-60
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
M10.29 % Program #M10.29
c = [2.4 6.76 26.15 68.43 186.83 326.51 565.53 678.95 805.24
678.95 565.53 326.51 186.83 68.43 26.15 6.76 2.4];
h = firminphase(c)
The coefficients of the minimum phase spectral factor are:
h = 7.6730 8.5329 18.0722 12.5696 12.6822 4.8388 2.0784 0.5332 0.3128
M10.30 % Program #M10.30
[h,g]=ifir(6,'low',[.1 .15],[.001 .001]);
[hh,w]=freqz(h,1,1024); hg=freqz(g,1,1024);
h = hh.*hg; % Compounded response
Fg = 20*log10(abs(hh)); Ig = 20*log10(abs(hg));
plot(w/pi,Fg,'-r',w/pi,Ig,'--b'); grid;
axis([0 1 -90 5]);
Not for sale
383
legend('F(z^6)','I(z)');
xlabel('\omega/\pi');title('Gain responses, in dB');
pause;
plot(w/pi,20*log10(abs(h))); grid;
axis([0 1 -90 5]);
xlabel('\omega/\pi');title('Gain response, in dB');
gtext('H_{IFIR}(z)');
Gain response, in dB
Gain responses, in dB
0
0
HIFIR(z)
6
-20
F(z )
I(z)
-20
-40
-40
-60
-60
-80
-80
0
0.2
0.4
0.6
0.8
0
1
0.2
0.4
0.6
0.8
1
ω/π
ω/ π
M10.31 % Program #M10.31
[h,g]=ifir(6,'high',[.9 .95],[.002 .004]);
[hh,w]=freqz(h,1,1024); hg=freqz(g,1,1024);
h = hh.*hg; % Compounded response
Fg = 20*log10(abs(hh)); Ig = 20*log10(abs(hg));
plot(w/pi,Fg,'-r',w/pi,Ig,'--b'); grid;
axis([0 1 -90 5]);
legend('F(z^6)','I(z)');
xlabel('\omega/\pi');title('Gain responses, in dB');
pause;
plot(w/pi,20*log10(abs(h))); grid;
axis([0 1 -90 5]);
xlabel('\omega/\pi');title('Gain response, in dB');
gtext('H_{IFIR}(z)');
Gain responses, in dB
Gain response, in dB
0
0
6
F(z )
I(z)
-20
-40
-40
-60
-60
-80
-80
0
0.2
HIFIR(z)
-20
0.4
0.6
0.8
1
ω/ π
0
0.2
0.4
0.6
0.8
1
ω/ π
Not for sale
384
M10.32 % Problem #M10.32
InpN = ceil(2*pi/(0.15*pi));
% Plotting function
% plots the result of using an equalizer of length InpN
%function [N] = plotfunc(InpN);
% Creating filters
Wfilt = ones(1, InpN);
Efilt = remezfunc(InpN, Wfilt);
% Plot running sum filter response
figure(1);
Wfilt = Wfilt/sum(Wfilt);
[hh, w] = freqz(Wfilt, 1, 512);
plot(w/pi, 20*log10(abs(hh)));
axis([0 1 -50 5]);grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Prefilter H(z)');
% Plot equalizer filter response
figure(2);
[hw, w] = freqz(Efilt, 1, 512);
plot(w/pi, 20*log10(abs(hw)));
axis([0 1 -50 5]);grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Equalizer F(z)');
% Plot cascade filter response
figure(3);
Cfilt = conv(Wfilt, Efilt);
[hc, w] = freqz(Cfilt, 1, 512);
plot(w/pi, 20*log10(abs(hc)));
axis([0 1 -80 5]);grid;
xlabel('\omega/\pi');ylabel('Gain, dB');
title('Cascade filter H(z)F(z)');
% Remez function using 1/P(z) as desired amplitude
% and P(z) as weighting
function [N] = remezfunc(Nin, Wfilt);
% Nin : number of tuples in the remez equalizer filter
% Wfilt : the prefilter
a = [0:0.001:0.999]; % The accuracy of the computation
w = a.*pi;wp = 0.05*pi;ws = 0.15*pi;
i = 1;n = 1;
for t = 1:(length(a)/2),
Not for sale
385
if w(2*t) < wp
pas(i) = w(2*t - 1);
pas(i+1) = w(2*t);
i = i+2;
end
if w(2*t-1) > ws
sto(n) = w(2*t - 1);
sto(n+1) = w(2*t);
n = n+2;
end
end
w = cat(2, pas, sto);
bi = length(w)/2;
for t1 = 1:bi,
bw(t1) = (w(2*t1) + w(2*t1-1))/2;
W(t1) = Weight(bw(t1), Wfilt, ws);
end
W = W/max(W);
for t2 = 1:length(w),
G(t2) = Hdr(w(t2), Wfilt, wp);
end
G = G/max(G);
N = remez(Nin, w/pi, G, W);
% Weighting function
function[Wout] = Weight(w, Wfilt, ws);
K = 22.8;
L = length(Wfilt);
Wtemp = 0;
Wsum = 0;
for k = 1:L,
Wtemp = Wfilt(k)*exp((k-1)*i*w);
Wsum = Wsum + Wtemp;
end
Wout = abs(Wsum);
if w > ws,
Wout = K*max(Wout);
end
% Desired function
function [Wout] = Hdr(w, Wfilt, ws);
if w <= ws,
L = length(Wfilt);
Wtemp = 0;
Wsum = 0;
for k = 1:L,
Wtemp = Wfilt(k)*exp(i*(k-1)*w);
Wsum = Wsum + Wtemp;
end
Wsum = abs(Wsum);
Wout = 1/Wsum;
Not for sale
386
else
Wout = 0;
end
Equalizer F(z)
0
-10
-10
Gain, dB
0
-20
-30
-40
-50
-20
-30
-40
0
0.2
0.4
0.6
0.8
-50
1
0
0.2
0.4
ω/ π
0.6
0.8
1
ω/ π
Cascade filter H(z)F(z)
0
-20
Gain, dB
Gain, dB
Prefilter H(z)
-40
-60
-80
0
0.2
0.4
0.6
0.8
1
ω/ π
Not for sale
387
Chapter 11
11.1 Analysis yields
w1[ n] = β1{x[ n − 1] + α 2 w2 [ n − 1]}, w2 [ n] = w1[ n] + w3 [ n],
w3 [ n] = β1{α 2 w2 [ n − 1] + α 2 w 4 [ n − 1]}, w 4 [ n] = w3 [ n] + w5 [ n],
w5 [ n] = β3 {α 2 w 4 [ n − 1] + α3 w5 [ n − 1]}, y[ n] = w1[ n] + α 0 x[ n].
In matrix form the above equations can be written as
0
0
0 ⎤ ⎡ w1[n − 1] ⎤ ⎡ β1 x[n − 1]⎤
⎡ w1[n] ⎤ ⎡0 0 0 0 0 0 ⎤ ⎡ w1[n] ⎤ ⎡0 α1β1 0
⎥
⎢ w [n]⎥ ⎢1 0 1 0 0 0 ⎥ ⎢ w [n]⎥ ⎢0
0
0
0
0
0
0 ⎥⎥ ⎢⎢ w2 [n − 1]⎥⎥ ⎢⎢
⎥
⎢ 2 ⎥ ⎢
⎥⎢ 2 ⎥ ⎢
⎥
⎢ w3[n]⎥ ⎢0 0 0 0 0 0 ⎥ ⎢ w3 [n]⎥ ⎢0 α 2 β 2 0 α 2 β 2
0
0
0 ⎥ ⎢ w3 [n − 1]⎥ ⎢
⎥
⎥⎢
⎥+⎢
⎢
⎥=⎢
⎥⎢
⎥+⎢
0
0
0
0
0
0 ⎥ ⎢ w4 [n − 1]⎥ ⎢
⎥
⎢ w4 [n]⎥ ⎢0 0 1 0 1 0 ⎥ ⎢ w4 [n]⎥ ⎢0
⎥
⎢ w5 [n]⎥ ⎢0 0 0 0 0 0 ⎥ ⎢ w5 [n]⎥ ⎢0
0
0
0 α 2 β 3 α 3 β3 0 ⎥ ⎢ w5 [n − 1]⎥ ⎢
⎥
⎥⎢
⎥ ⎢
⎢
⎥ ⎢
⎥⎢
⎥ ⎢
0
0
0
0
0 ⎦ ⎣ y[n − 1] ⎦ ⎢⎣ α 0 x[n] ⎥⎦
⎣ y[n] ⎦ ⎣1 0 0 0 0 0 ⎦ ⎣ y[n] ⎦ ⎣0
⎡0 0 0 0 0 0 ⎤
⎢1 0 1 0 0 0 ⎥
Here the F matrix is given by: F = ⎢⎢0 0 0 0 0 0⎥⎥.
0 0 1 0 1 0
⎢0 0 0 0 0 0 ⎥
⎢⎣1 0 0 0 0 0⎥⎦
Since the F matrix contains nonzero entries above the main diagonal, the above set of
equations are not computable.
11.2 A computable set of equations are given by:
w1[ n] = β1{x[ n − 1] + α1w2 [ n − 1]}, w3[ n] = β1{α2 w2 [ n − 1] + α2 w4 [ n − 1]},
w5[ n] = β3 {α2 w4 [ n − 1] + α3w5[ n − 1]}, w2 [ n] = w1[ n] + w3[ n], y[ n] = w1[ n] + α0 x[ n] ,
w4 [ n] = w3[ n] + w5[ n] .
In matrix form the above equations can be written as
0
0
0 ⎤ ⎡ w1[n − 1] ⎤ ⎡ β1 x[n − 1]⎤
⎡ w1[n] ⎤ ⎡0 0 0 0 0 0 ⎤ ⎡ w1[n] ⎤ ⎡0 α1β1 0
⎢ w [ n]⎥ ⎢ 0 0 0 0 0 0 ⎥ ⎢ w [ n]⎥ ⎢ 0 α β 0 α β
⎥
0
0 ⎥⎥ ⎢⎢ w3 [n − 1]⎥⎥ ⎢⎢
0
2 2
2 2
⎢ 3 ⎥ ⎢
⎥
⎥⎢ 3 ⎥ ⎢
⎢ w5 [n]⎥ ⎢0 0 0 0 0 0 ⎥ ⎢ w5 [n]⎥ ⎢0
⎥
0
0 α 2 β 3 α 3 β 3 0 ⎥ ⎢ w5 [n − 1]⎥ ⎢
0
⎥+⎢
⎢
⎥=⎢
⎥+⎢
⎥⎢
⎥
⎥⎢
0
0
0
0
0 ⎥ ⎢ w2 [n − 1]⎥ ⎢
0
⎢ w2 [n]⎥ ⎢1 0 1 0 0 0 ⎥ ⎢ w2 [n]⎥ ⎢0
⎥
⎢
⎥
⎢ y[n] ⎥ ⎢1 0 0 0 0 0 ⎥ ⎢ y[n] ⎥ ⎢0
⎥
⎢
0
0
0
0
0 y[n − 1]
α 0 x[n] ⎥
⎢
⎥ ⎢
⎥ ⎢
⎥ ⎢
⎥⎢
⎥
⎥⎢
0
0
0
0
0 ⎦ ⎢⎣ w4 [n − 1]⎥⎦ ⎣
0
⎢⎣ w4 [n]⎥⎦ ⎣0 0 1 0 1 0 ⎦ ⎢⎣ w4 [n]⎥⎦ ⎣0
⎦
⎡0
⎢0
Here the F matrix is given by: F = ⎢⎢0
1
⎢1
⎢⎣0
0
0
0
0
0
0
0
0
0
1
0
1
0
0
0
0
0
0
Not for sale
0
0
0
0
0
1
0⎤
0⎥
0 ⎥.
0⎥
0⎥
0⎥⎦
388
Since the F matrix has no nonzero entries above the main diagonal, the new set of equations
are computable.
11.3 Analysis yields w1[ n] = β1 {α1w2 [ n − 1] + α 2 w 4 [ n − 1] + α3 w6 [ n − 1]}, w2 [ n] = w1[ n] + x[ n],
w3 [ n] = β2 {α2 w 4 [ n − 1] + α3 w6 [ n − 1]}, w 4 [ n] = w2 [ n] + w3 [ n], w 5 [ n] = β 3 {α3 w6 [ n − 1]},
w6 [ n] = w4 [ n] + w5[ n], y[ n] = α1w2 [ n] + α2 w 4 [ n] + α3 w6 [ n] + α 0 x[ n].
In matrix form the above set of equations are given by
⎡ w1[n] ⎤ ⎡0 0
⎢ w [ n ]⎥ ⎢ 1 0
⎢ 2 ⎥ ⎢
⎢ w3 [n]⎥ ⎢0 0
⎢
⎥ ⎢
⎢ w4 [n]⎥ = ⎢0 1
⎢ w5 [n]⎥ ⎢0 0
⎢
⎥ ⎢
⎢ w6 [n]⎥ ⎢0 0
⎢ y[n] ⎥ ⎢0 a
⎣
⎦ ⎣
1
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0 1
0 a2
0 ⎤ ⎡ w1[n] ⎤ ⎡0 β1α1
0 ⎥⎥ ⎢ w2 [ n]⎥ ⎢0
0
⎢
⎥ ⎢
0 ⎥ ⎢ w3 [ n]⎥ ⎢0
0
⎥⎢
⎥ ⎢
0 ⎥ ⎢ w4 [ n]⎥ + ⎢0
0
⎥
⎢
⎥
⎢
0 w5 [n]
0
0
⎥⎢
⎥ ⎢
0 ⎥ ⎢ w6 [ n]⎥ ⎢0
0
0 ⎥⎦ ⎢⎣ y[ n] ⎥⎦ ⎢⎣0
0
1 0
0 a3
⎡0 0
⎢1 0
⎢0 0
Here the F matrix is given by: F = ⎢0 1
⎢0 0
⎢0 0
⎢⎣0 α1
β1α 2
0
β1α 3
0
0
0
0 β 2α 2
0
0
0 β 2α 3
0
0
0
0
0
0
0
0
0 β 3α 3
0
0
0
0
0
0
0 0
0 0
0 0
0 0
0 0
1 0
0 α3
0⎤
0⎥
0⎥
0 ⎥.
0⎥
0⎥
0 ⎥⎦
0 0
0 0
0 0
1 0
0 0
0 1
0 α2
0 ⎤ ⎡ w1[n − 1] ⎤ ⎡ 0 ⎤
0 ⎥⎥ ⎢⎢ w2 [n − 1]⎥⎥ ⎢⎢ x[ n] ⎥⎥
0 ⎥ ⎢ w3 [n − 1]⎥ ⎢ 0 ⎥
⎥
⎥⎢
⎥ ⎢
0 ⎥ ⎢ w4 [n − 1]⎥ + ⎢ 0 ⎥
0 ⎥ ⎢ w5 [n − 1]⎥ ⎢ 0 ⎥
⎥
⎥⎢
⎥ ⎢
0 ⎥ ⎢ w6 [ n − 1]⎥ ⎢ 0 ⎥
0 ⎥⎦ ⎢⎣ y[ n − 1] ⎥⎦ ⎢⎣α 0 x[n]⎥⎦
Since the diagonal of the F matrix has all zeros, and no nonzero entries above the main
diagonal, the new set of equations are computable.
11.4
α0
_1
x[n]
β1 z
_1
β2 α 1 z
1
β1 α 1 z
w1[n]
_1
β2 α 2 z
1
w2 [n]
β3 α 2 z
1
_1
_1
1
w5 [n]
w4 [n]
w3 [n]
y[n]
_1
1
β3 α 3 z
Reduced signal flow graph obtained by removing the branches going out of the input node
and the delay branches is:
1
w1[n]
1
1
1
w2 [n]
w3 [n]
w4 [n]
w5 [n]
y[n]
1
Not for sale
389
The node sets of the precedence graph are as follows:
{N 1 } = {w 1 [n], w 3 [n], w 5 [ n] }, {N 2 } = {w 2 [ n], w 4 [ n], wy[ n] }.
N1
N2
w1[n]
w2 [n]
w3 [n]
w4 [n]
w5 [n]
y[n]
In the above precedence graph, N 1 contains only outgoing nodes and N 2 contains only incoming
branches. The structure has no delay free loops. A valid computational algorithm is:
w1[ n] = β1{x[ n − 1] + α1w2 [ n − 1]}, w3[ n] = β1{α2 w2 [ n − 1] + α2 w4 [ n − 1]},
w5[ n] = β3 {α2 w4 [ n − 1] + α3w5[ n − 1]}, w2 [ n] = w1[ n] + w3[ n], y[ n] = w1[ n] + α0 x[ n] ,
w4 [ n] = w3[ n] + w5[ n] .
11.5 Reduced signal flow graph is:
1
1
w1[n]
1
1
w2 [n]
w3 [n]
α3
1
w4 [n]
w5 [n]
α2
y[n]
w6 [n]
α1
The node sets of the precedence graph are as follows: {N 1 } = {w1[ n], w3 [ n], w5 [ n]},
{N 2 } = {w2 [ n]}, {N 3 } = {w4 [ n]}, {N 4 } = {w6 [ n]},{N 5 } = {y[ n]}.
N1
w1[n]
w3 [n]
N2
N3
N4
N5
w2 [n]
w5 [n]
y[n]
w4 [n]
w6 [n]
A valid computational algorithm is:
w1[ n] = β1{α1w2 [ n − 1] + α2 w 4 [ n − 1] + α3 w6 [ n − 1]},
w3 [ n] = β2 {α2 w 4 [ n − 1] + α3 w6 [ n − 1]}, w 5 [ n] = β 3 {α3 w6 [ n − 1]},
w2 [ n] = w1[ n] + x[ n], w4 [ n] = w2 [ n] + w3 [ n], w6 [ n] = w4 [ n] + w5[ n],
y[ n] = α1w2 [ n] + α2 w 4 [ n] + α3 w6 [ n] + α 0 x[ n].
11.6 (a) Analysis yields w1[ n] = w2 [ n] − k1w1[ n − 1], w2 [ n] = w3 [ n] − k 2 s 2 [ n − 1],
w3 [ n] = x[ n] − k3 s3 [ n − 1], s 2 [ n] = k1w1[ n] + w1[ n − 1], s3 [ n] = k 2 w2 [ n] + s 2 [ n − 1],
y[ n] = k3 w3 [ n] + s3 [ n − 1]. In matrix form we have
Not for sale
390
⎡ w1 [ n ] ⎤ ⎡ 0 ⎤ ⎡ 0 1 0 0 0 0 ⎤ ⎡ w 1 [ n ] ⎤
⎢ w 2 [ n]⎥ ⎢ 0 ⎥ ⎢ 0 0 1 0 0 0⎥ ⎢ w 2 [ n]⎥
⎢ w [ n]⎥ ⎢ x[ n]⎥ ⎢ 0 0 0 0 0 0⎥ ⎢ w [ n]⎥
3
⎢ 3 ⎥=⎢
0 0 0 0 0 ⎥ ⎢ s [ n] ⎥
⎥ + ⎢k
2
⎥
⎢
⎢ s 2 [ n] ⎥ ⎢ 0 ⎥ ⎢ 1
⎥
⎢ s 3 [ n] ⎥ ⎢ 0 ⎥ ⎢ 0 k 2 0 0 0 0 ⎥ ⎢ s 3 [ n] ⎥
0 0⎦ ⎢ y[ n] ⎥
⎢⎣ y[ n] ⎥⎦ ⎣ 0 ⎦ 1
3 4044
⎣ 044044k2
⎦
43 ⎣
F
0
0
0 ⎤ ⎡ w1 [ n − 1] ⎤
⎡ − k1 0 0
⎢ 0
0 0 − k2
0
0 ⎥ ⎢ w 2 [ n − 1]⎥
⎥
⎢
⎢ 0
− k3 0 ⎥ ⎢ w 3 [ n − 1]⎥ .
0 0
0
+⎢
⎥ s [ n − 1]
0 0
0
0
0⎥ ⎢ 2
⎥
⎢ 1
s
n
−
[
1
]
0
0
0
1
0
0
⎥
⎢
⎢
⎥ 3
0
0
0
0
1
0
⎢
⎣1444442444443⎦ ⎣ y[ n − 1] ⎥⎦
G
As the diagonal elements of F-matrix are all zeros, there are no delay-free loops. However,
the above set of equations are not computable as there are non-zero elements above the
diagonal of F.
(b) The reduced signal flow-graph representation of Figure P11.3 is shown below:
From the above flow-graph we observe that the set composed of nodes with only outgoing
branches is N 1 = {w 3 [ n]}. The set of nodes with incoming branches from N 1 and
outgoing branches is N 2 = {w2 [ n]}. The set of nodes with incoming branches from N 1
and N 2 and outgoing branches is N 3 = {w1[ n]}. Finally, the set of nodes with only
incoming branches from N 1 , N 2 and N 3 , and no outgoing branches
N 4 = {s 2 [ n], s3 [ n], y[ n]}. Therefore, one possible ordered set of equations that is
⎡ w3 [ n]⎤ ⎡ 0 0 0 0 0 0⎤ ⎡ w3 [ n]⎤
⎢ w2 [ n]⎥ ⎢ 1 0 0 0 0 0⎥ ⎢ w2 [ n]⎥
⎢ w [ n] ⎥ ⎢ 0 1 0 0 0 0 ⎥ ⎢ w [ n] ⎥
computable is given by ⎢ 1 ⎥ = ⎢ 0 0 k 0 0 0⎥ ⎢ 1 ⎥
1
s [ n]
⎢ s 2 [ n] ⎥ ⎢
⎥⎢ 2 ⎥
k
0
0
0
0
0
2
⎢ s1[ n] ⎥ ⎢
⎥ ⎢ s1[ n] ⎥
k3 0 0 0 0 0⎦ ⎢ y[ n] ⎥
⎢⎣ y[ n] ⎥⎦ ⎣1
⎦
4444244443 ⎣
F
− k3 0⎤ ⎡ w3 [ n − 1]⎤
0
0
⎡0 0
⎢0 0
− k2
0
0
0⎥ ⎢ w2 [ n − 1]⎥
⎢
⎥
⎢0 0 − k
0
0
0⎥ ⎢ w1[ n − 1] ⎥ .
3
+⎢
⎥ s [ n − 1]
1
0
0
0⎥ ⎢ 2
⎥
⎢0 0
−
s
n
[
1
]
0
0
0
1
0
0
⎢
⎥
⎥ 1
⎢
0
0
1
0⎥⎦ ⎢⎣ y[ n − 1] ⎥⎦
⎢⎣0 0
1444442444443
G
Note: All elements on the diagonal and above diagonal of F are zeros.
Not for sale
391
p + p1 z −1 + p2 z −2
11.7 H ( z ) = 0
. From Eq. (11.18) we get,
1 − 3 z − 1 + 1 .5 z − 2
0
0 ⎤ ⎡ 1 ⎤ ⎡ 3.2 ⎤
⎡ p0 ⎤ ⎡3.2
⎢ p ⎥ = ⎢5.6 3.2
⎥ ⎢ − 3⎥ = ⎢ − 4.0⎥. Hence, H ( z ) = 3.2 − 4 z −1 − 5z −2 .
0
1
⎢ ⎥ ⎢
⎥⎢ ⎥ ⎢
⎥
1 − 3z −1 + 1.5z − 2
⎢⎣ p2 ⎥⎦ ⎢⎣7.0 5.6 3.2⎥⎦ ⎢⎣1.5 ⎥⎦ ⎢⎣ − 5.0 ⎥⎦
11.8 From Eqn (11.15),
⎡ d1 ⎤
⎡4
⎢ d ⎥ = − ⎢8
⎣
⎣ 2⎦
⎡ p0 ⎤ ⎡ 2
⎢ p ⎥ = ⎢− 2
⎢ 1⎥ ⎢
⎢⎣ p2 ⎥⎦ ⎢⎣ 4
− 2⎤
4 ⎥⎦
0
2
−2
11.9 From Eqn. (11.15)
⎡ d 1 ⎤ ⎡− 8
⎢ d ⎥ = ⎢ 12
⎢ 2⎥ ⎢
⎢⎣ d 3 ⎥⎦ ⎢⎣ 16
⎡ p0 ⎤ ⎡ 2
⎢p ⎥ ⎢
⎢ 1 ⎥ = ⎢− 4
⎢ p2 ⎥ ⎢ 8
⎢ ⎥ ⎢
⎣ p3 ⎦ ⎣ − 8
H ( z) =
0 0⎤
⎡ p0 ⎤ ⎡ 2
⎢ p ⎥ ⎢ −2 2 0 ⎥ 1
⎢ 1⎥ ⎢
⎥⎡ ⎤
⎢ p2 ⎥ = ⎢ 4 −2 2 ⎥ ⎢ d1 ⎥ and from Eqn (11.20),
⎢ ⎥ ⎢
⎥⎢ ⎥
−
0
8
4
2
⎢ ⎥ ⎢
⎥ ⎣⎢ d 2 ⎦⎥
⎢⎣ 0 ⎥⎦ ⎢⎣ −12 8 4 ⎥⎦
−1
⎡ 8 ⎤ ⎡ − 0.25⎤
⎢ − 12⎥ = ⎢ 3.5 ⎥. . Finally, from Eqn (11.21),
⎣
⎦ ⎣
⎦
0⎤ ⎡ 1 ⎤ ⎡ 2 ⎤
2 − 2.5z −1 + 11.5z −2
0⎥⎥ ⎢⎢ − 0.25⎥⎥ = ⎢⎢ − 2.5⎥⎥. Hence, H ( z) =
.
1 − 0.25z −1 + 3.5z − 2
2⎥⎦ ⎢⎣ 3.5 ⎥⎦ ⎢⎣ 11.5 ⎥⎦
⎡ p0 ⎤ ⎡ 2
⎢ ⎥ ⎢
⎢ p1 ⎥ ⎢ −4
⎢ p2 ⎥ ⎢ 8
⎢ ⎥ ⎢
⎢ p3 ⎥ = ⎢ −8
⎢ 0 ⎥ ⎢12
⎢ ⎥ ⎢
⎢ 0 ⎥ ⎢16
⎢ 0 ⎥ ⎢ −8
⎣ ⎦ ⎣
8
−8
12
− 4⎤
8 ⎥⎥
− 8 ⎥⎦
0
2
−4
8
0
0
2
−4
−1
0 0 0⎤
2 0 0 ⎥⎥ ⎡ ⎤
−4 2 0 ⎥ ⎢⎢ 1 ⎥⎥
⎥
8 −4 2 ⎥ ⎢ d1 ⎥ . Next, from Eqn. (11.20),
⎢ ⎥
−8 8 −4 ⎥ ⎢ d 2 ⎥
⎥
12 −8 8 ⎥ ⎢⎣ d3 ⎥⎦
16 12 −8⎥⎦
⎡ 12 ⎤ ⎡ 0.4 ⎤
⎢ 16 ⎥ = ⎢ − 4.8⎥. Finally, from Eqn. (11.21),
⎥
⎢ ⎥ ⎢
⎢⎣ − 8⎥⎦ ⎢⎣ − 7.4⎥⎦
0⎤ ⎡ 1 ⎤ ⎡ 2.0 ⎤
0⎥⎥ ⎢⎢ 0.4 ⎥⎥ ⎢⎢ − 3.2 ⎥⎥
=
. Hence,
0⎥ ⎢ − 4.8⎥ ⎢ − 3.2 ⎥
⎥⎢
⎥ ⎢
⎥
2⎦ ⎣ − 7.4 ⎦ ⎣ − 0.4⎦
2 − 3.2 z −1 − 3.2 z −2 − 0.4 z −3
1 + 0.4 z −1 − 4.8z − 2 − 7.4 z − 3
.
Not for sale
392
11.10
⎡ p0 ⎤ ⎡ 2 0 0
⎢ ⎥ ⎢
⎢ p1 ⎥ = ⎢ −4 2 0
⎢ p2 ⎥ ⎢ 4 −4 2
⎢ ⎥ ⎢
⎣ p3 ⎦ ⎣ −6 −6 −4
0⎤ ⎡ 1 ⎤ ⎡ 2 ⎤
0 ⎥⎥ ⎢⎢ −0.6 ⎥⎥ ⎢⎢ −5.2⎥⎥
=
. Hence, P ( z ) = 2 − 5.2 z −1 + 6.8 z −2 − 5.6 z −3 .
0 ⎥ ⎢ 0.2 ⎥ ⎢ 6.8 ⎥
⎥⎢
⎥ ⎢
⎥
2 ⎦ ⎣ 1.8 ⎦ ⎣ −5.6⎦
⎡ p0 ⎤ ⎡ 2 0 0 0
⎢ ⎥ ⎢
⎢ p1 ⎥ ⎢ −2 2 0 0
11.11 ⎢ p2 ⎥ = ⎢ 4 −2 2 0
⎢ ⎥ ⎢
⎢ p3 ⎥ ⎢ 6 4 −2 2
⎢⎣ p4 ⎥⎦ ⎢⎣ −8 6 4 −2
0⎤ ⎡ 1 ⎤ ⎡ 2 ⎤
0 ⎥⎥ ⎢⎢ 2 3 ⎥⎥ ⎢⎢ − 2 3 ⎥⎥
0⎥ ⎢ 0 ⎥ = ⎢ 2 2 3 ⎥ .
⎥⎢ ⎥ ⎢
⎥
0 ⎥ ⎢ −2 ⎥ ⎢ 4 2 3 ⎥
2 ⎥⎦ ⎢⎣ 5 3 ⎥⎦ ⎢⎣ −3 1 3 ⎥⎦
{ pi } = {2, − 2 3 , 2 2 3 , 4 2 3 , −3 13}
11.12 The k –th sample of an N –point DFT is given by X[ k ] =
N −1
∑ n = 0 x[n]WNnk .
Thus, the
computation of X [k ] requires N complex multiplications and N − 1 complex additions.
Now, each complex multiplication, in turn, requires 4 real multiplications and 2 real
additions. Likewise, each complex addition requires 2 real additions. As a result, the N
complex multiplications needed to compute X [k ] require a total of 4 N real multiplications
and a total of 2 N − 2 real additions. Therefore, each sample of the N –point DFT involves
4 N real multiplications and 4 N − 2 real additions. Hence, the computation of all DFT
samples thus requires 4N 2 real multiplications and (4 N − 2) N real additions.
11.13 Let the two complex numbers be α = a + j b and β = c + j d. Thus, αβ = ( a + j b)(c + j d )
= ( ac − bd ) + j ( ad + bc ), which requires 4 real multiplications and 2 real additions. Consider
the product ( a + b)(c + d ), ac, and bd, which require 3 real multiplications and 2 real
additions. The imaginary part of αβ can be formed from ( a + b)(c + d ) − ac − bd = ad + bc,
which now requires 2 real additions. Likewise, the real part of αβ can be formed from
ac − bd requiring an additional real additions. Hence, the complex multiplication can be
computed using 3 real multiplications and 5 real additions.
11.14 Recall, WN = e − j 2π / N = c + j s, where c = cos( 2π / N ) and s = − sin( 2π / N ). Thus,
c 2 + s 2 = 1. Now, Ψ r +1 = W N ⋅Ψ r = (c + j s )(Re{Ψ r } + j Im{Ψ r })
= (c ⋅ Re{Ψr } − s ⋅ Im{Ψr }) + j (c ⋅ Im{Ψr } + s ⋅ Re{Ψr }).
Thus, Re{Ψr +1} = c ⋅ Re{Ψr } − s ⋅ Im{Ψr } and Im{Ψr +1} = c ⋅ Im{Ψr } + s ⋅ Re{Ψr }.
Figure P11.4 with internal node label is shown below. Its analysis yields
U
Re{ψr }
c _1
____
s
Re{ψr+1}
s
Im{ψ r }
c _1
____
s
Im{ψr+1}
Not for sale
393
c −1
Im{Ψr }, (2): Im{Ψr +1} = Im{Ψr } + sU , and
s
c −1
(3): Re{Ψr + 1} = U +
Im{Ψr + 1}. Substituting Eqs. (1) in Eq. (2) we get
s
⎛ c −1
⎞
(4): Im{Ψr + 1} = Im{Ψr } + s⎜
Im{Ψr } + Re{Ψr }⎟ = c ⋅ Im{Ψr } + s ⋅ Re{Ψr }. Next,
⎝ s
⎠
substituting Eqs. (1) and (4) in Eq. (3) we get (5):
c −1
(5): Re{Ψr + 1} =
(c ⋅ Im{Ψr } + s ⋅ Re{Ψr }) + c − 1 Im{Ψr } + Re{Ψr }
s
s
2
2
c −1
−s
=
Im{Ψr } + c ⋅ Re{Ψr } =
⋅ Im{Ψr } + c ⋅ Re{Ψr } = c ⋅ Re{Ψr } − s ⋅ Im c ⋅ Re{Ψr }.
s
s
It thus follows that the structure of Figure P11.4 implements the multiplication of a complex
signal with the twiddle factor using only 3 real multiplications.
(1): U = Re{Ψr } +
.
In the case of multiplication by complex twiddle factor W N−1 = c − js, we have
Ψ r +1 = W N−1 ⋅Ψ r = (c − j s )(Re{Ψ r } + j Im{Ψ r })
= (c ⋅ Re{Ψr } + s ⋅ Im{Ψr }) + j (c ⋅ Im{Ψr } − s ⋅ Re{Ψr }). Thus, here
Re{Ψr +1} = c ⋅ Re{Ψr } + s ⋅ Im{Ψr } and Im{Ψr +1} = c ⋅ Im{Ψr } − s ⋅ Re{Ψr }. It follows
then that the real and imaginary parts are simply obtained by reversing the sign of s of the
real and imaginary parts derived in the case of multiplication by W N . As a result, the
corresponding structure is obtained by cascading an inverter to the real multipliers in Figure
P11.4 as indicated below:
Re{ψr }
Im{ψ r }
U
_1
c _1
____
s
s
_1
_1
c _1
____
s
Re{ψr+1}
Im{ψr+1}
kFT
, where N = # of bins, and FT is the sampling
N
⎢ f N⎥
frequency. Inverting we have k ( f ) = ⎢
⎥. Therefore, the absolute difference from one of
⎣ FT ⎦
the given four tones (150 Hz, 375 Hz, 620 Hz, and 850 Hz) to the center of its bin is given by
F ⎢ f N⎥
dist ( N , f ) = f − T ⎢
⎥ . It follows from this equation that the distance goes to zero if
N ⎣ FT ⎦
11.15 The center frequency bin k : f c (k ) =
FT ⎢ f N ⎥
fN
is an integer.
⎢
⎥ = f or
N ⎣ FT ⎦
FT
Not for sale
394
fN
The total distance is reduced to zero if i is an integer for i = 1,K , 4. The minimum value
FT
of N for which this true is 500.
However, the total distance can be small, but nonzero, for significantly smaller values of N .
11.16 H k ( z ) =
1
1 − WN− k z −1
where V ( z ) =
. Hence, Y ( z ) =
1
1 − WN− k z −1
{
= 1,
WN−1 ,
1 − WN− k z −1
=
1 + z −N / 2
1 − WN− k z −1
. Or, in other words, y[ n] = v[ n] + v[ n −
Consider k = 1 : Then V ( z ) =
v[ n] = WN− n µ[ n] =
X ( z)
1
1 − WN−1 z −1
= V ( z ) + z − N / 2V ( z ),
N
].
2
. This implies,
N
⎧
⎫
− ( + 1)
⎪
⎪
−
1
−
2
−
N
/
2
2
, WN
, L⎬
⎨1, WN , WN , L, WN
⎪
⎪
⎩
⎭
WN− 2 ,
son on. Thus, v[ n −
L, − 1,
N
]=
2
{0,
− WN−1 ,
N
− ( + 1)
−
/
2
N
L , since WN
= −1, WN 2
= −WN−1 , and
}
}
0, 0, L, 1, WN−1 , WN− 2 , L . Hence,
N
⎧
⎫
− ( − 1)
⎪
⎪
−
1
−
2
2
y[ n] = v[ n] + v[ n −
, 0, 0, 0, L⎬.
⎨1, WN , WN , L, WN
⎪
⎪
⎩
⎭
1
N
Now, consider k = : V ( z ) =
. This implies,
2
1 − WN− N / 2 z −1
N
]=
2
v[ n] = WN− ( N / 2 )n µ[ n] =
N
] = 0, 0, 0, L,
2
N N
N
− ⋅
−
N
/
2
WN 2 2 = (−1)
, WN 2
Thus, v[ n −
Now,
{
N
N N
N
N
⎧
⎫
−
− ⋅
− ( + 1) ⋅
⎪
⎪
N
−
2
2
2
2
2
, WN
, L⎬.
⎨1, WN , WN , L, WN
⎪
⎪
⎩
⎭
}
0, 1, WN− N / 2 , WN− N , L .
N
N
− ( + 1)
N
−
2 = (−1) N / 2 (−1), etc. Hence,
= −1, WN = 1, WN 2
⎧
⎫
N
+1
⎪
⎪
N
/
2
y[ n] = ⎨1, − 1, 1, − 1, L, 1 + (−1)
, 1 + (−1) 2 , L, L⎬. Therefore, if N / 2
N
n= N / 2
⎪
⎪
n = +1
2
⎩
⎭
⎫
⎧
⎪
⎪
is even, y[ n] = ⎨1, − 1, 1, − 1, L,
− 2,
2,
2, L⎬, and if N / 2 is odd,
n = N / 2 n = N +1
⎪
⎪
2
⎭
⎩
Not for sale
395
⎫
⎧
⎪
⎪
y[ n] = ⎨1, − 1, 1, − 1, L,
0,
0,
0, L⎬,
n = N / 2 n = N +1
⎪
⎪
2
⎭
⎩
11.17
11.18
11.19 X[ k ] =
N −1
∑ x[n]WNnk
n=0
=
N
−1
r1
∑
n=0
nkr1
x[ nr1 ]WN
+
N
−1
r1
∑
n=0
nkr1 + k
x[ nr1 + 1]WN
+K+
Not for sale
N
−1
r1
∑
n=0
nkr1 + (r1 −1)k
x[ nr1 + r 1−1]WN
396
⎛ N −1
⎞
⎟
r1 −1⎜ r1
⎜
nkr ⎟
=
x[nr 1+i ]W N 1 ⎟ W Nki .
⎜
⎟
i =0 ⎜ n=0
⎜ ( N / r1 ) − point DFT ⎟
⎝
⎠
Thus, if the ( N / r1 ) -point DFT has been calculated, we need at the first stage an additional
(r1 − 1) multiplications to compute one sample of the N –point DFT X [k ] and, as a result,
additional (r1 − 1) N multiplications are required to compute all N samples of the N –point
DFT. Decomposing it further, it follows that additional (r2 − 1) N multiplications are needed
at the second stage, and so on. Therefore, the total number of multiply (add) operations
ν
ri − ν ⎞⎟ N .
= (r1 − 1) N + (r2 − 1) N + K + (rν − 1) N = ⎛⎜
⎠
⎝ i =1
∑∑
∑
11.20 An examination of the flow-graph of the 8-point DIT FFT algorithm shown in Figure 11.24
reveals that in the first stage all twiddle factors are WN0 = 1 and in the second stage the
twiddle factors are either WN0 = 1 or W NN / 4 = j. Hence, there are no twiddle factors with
nonunity magnitudes in the first two stages. In all succeeding stages, one of the twiddle
factors is WN0 = 1 and another one is W NN / 4 = j. The number of twiddle factors with
nonzero magnitudes in the i -th stage, i ≥ 3, is 2 i −1 − 2. Hence, the total number of twiddle
factors with nonzero magnitudes in an N-point radix-2 FFT algorithm is
⎛ ν
⎞
R (ν) = ⎜⎜
2 i −1 ⎟⎟ − 2(ν − 2), ν ≥ 3, where N = 2 ν.
⎜
⎟
⎝ i =3
⎠
∑
11.21 Direct computation of M samples of an N -point DFT requires M 2 multiplications,
whereas, the Radix-2 FFT algorithm requires
N
2
log 2 N multiplications. In order for a N-
point radix-2 FFT algorithm to be computationally more efficient than a direct computation
⎢ N
⎥
of M samples of an N -point DFT, the following inequality must hold: M > ⎢
log 2 N ⎥.
⎣ 2
⎦
a) N = 512, M = 49, b) N = 1024, M = 72, c) N = 2048, M = 107
11.22 X ( z) = X 0 ( z 3 ) + z −1 X1 ( z 3 ) + z −2 X 2 ( z 3 ). Thus, the N –point DFT can be expressed as
X[ k ] = X 0 [⟨ k ⟩ N / 3 ] + WNk X1[⟨ k ⟩ N / 3 ] + WN2 k X 2 [⟨ k ⟩ N / 3 ]. Hence, the structural
interpretation of the first stage of the radix-3 DFT is as indicated below:
Not for sale
397
x[n]
3
z
+
X[k]
x 1[n] N_ -point X 1[< k >N/3 ] WNk
+
3
3
DFT
z
3
11.23 X[ k ] =
x 0[n] N
_ -point X 0 [< k >N/3 ]
3
DFT
2k
x 2[n] N_
X 2[< k >N/3 ] WN
-point
3
DFT
∑ x[n]W9nk = (x[0]W90⋅ k + x[3]W93k + x[6]W96k )
8
n=0
(
) (
+ x[1]W9k + x[ 4]W94 k + x[7]W97k + x[2]W92 k + x[5]W95k + x[8]W98k
)
(
) (
)
+ (x[2]W90 ⋅ k + x[5]W93k + x[8]W96 k )W92 k = G0 [⟨ k ⟩ 3 ] + G1[⟨ k ⟩ 3 ]W9k + G2 [⟨ k ⟩ 3 ]W92 k , where
= x[0]W90 ⋅ k + x[3]W93k + x[6]W96 k + x[1]W90 ⋅ k + x[ 4]W93k + x[7]W96 k W9k
G0 [⟨ k ⟩ 3 ] = x[0]W30 ⋅ k + x[3]W3k + x[6]W32 k , G1[⟨ k ⟩ 3 ] = x[1]W30 ⋅ k + x[ 4]W3k + x[7]W32 k ,
G2 [⟨ k ⟩ 3 ] = x[2]W30 ⋅ k + x[5]W3k + x[8]W32 k , are 3-point DFTs. A flow-graph representation
of this radix-3 DIT FFT computation scheme is shown below,
where the twiddle factors for computing the DFT samples are indicated below for a typical
DFT sample:
Not for sale
398
In the above diagram, the 3-point DFT computation is carried out as indicated below:
11.24 X[ k ] =
∑ x[n]W15nk = (x[0]W150⋅ k + x[3]W153k + x[6]W156k + x[9]W159k + x[12]W1512k )
14
n=0
k + x[ 4]W 4 k + x[ 7]W 7k + x[10]W 10 k + x[13]W 13k
+ x[1]W15
15
15
15
15
2
k
5
k
8
k
11
k
14 k
+ x[2]W15 + x[5]W15 + x[8]W15 + x[11]W15 + x[14]W15
k + G [ ⟨ k ⟩ ]W 2 k , where
= G0 [⟨ k ⟩ 5 ] + G1[⟨ k ⟩ 5 ]W15
2
5 15
0
⋅
k
k
G0 [⟨ k ⟩ 5 ] = x[0]W5 + x[3]W5 + x[6]W52 k + x[9]W53k + x[12]W54 k ,
G1[⟨ k ⟩ 5 ] = x[1]W50 ⋅ k + x[ 4]W5k + x[7]W52 k + x[10]W53k + x[13]W54 k , and
G2 [⟨ k ⟩ 5 ] = x[2]W50 ⋅ k + x[5]W5k + x[8]W52 k + x[11]W53k + x[14]W54 k .
(
(
)
)
A flow-graph representation of this mixed-radix DIT FFT computation scheme is shown
below:
Not for sale
399
11.25
11.26 Now, by definition, q[ n] = Im{X [ n]} + j Re{X [ n]}. Its N -point DFT is given by
Q[ k ] =
N −1
∑ q[n]WNnk .
Thus,
n=0
Not for sale
400
(1): Re{Q[ k ]} =
(2): Im{Q[ k ]} =
N −1
⎡
⎛ 2πmk ⎞
⎛ 2πmk ⎞ ⎤
⎟ + Re{X[ n] sin⎜
⎟⎥ ,
N ⎠
⎝ N ⎠⎦
∑ ⎢⎣Im{X[n] cos⎜⎝
m=0
N −1
⎡
⎛ 2πmk ⎞
⎛ 2πmk ⎞ ⎤
⎟ + Re{X[ n] cos⎜
⎟⎥ .
N ⎠
⎝ N ⎠⎦
∑ ⎢⎣− Im{X[n] sin⎜⎝
m=0
N −1
∑
1
X[ m]WN− mk . Hence,
From the definition of the inverse DFT we observe x[ k ] =
N m=0
(3): Re{x[ k ]} =
N −1
⎡
1
⎛ 2πmk ⎞
⎛ 2πmk ⎞ ⎤
Re{X[ m]} cos⎜
⎟ − Im{X[ m]}sin⎜
⎟ ⎥,
⎢
N m=0 ⎣
⎝ N ⎠
⎝ N ⎠⎦
∑
N −1
⎡
1
⎛ 2πmk ⎞
⎛ 2πmk ⎞ ⎤
Im{X[ m]} cos⎜
⎟ + Re{X[ m]}sin⎜
⎟ ⎥.
⎢
N m=0 ⎣
⎝ N ⎠
⎝ N ⎠⎦
1
Comparing Eqs. (2) and (3) we get Re{x[ n]} = ⋅Im{Q[ k ]} k = n , and comparing Eqs. (1)
N
1
and (4) we get Im{x[ n]} = ⋅Re{Q[ k ]} k = n .
N
∑
(4): Im{x[ k ]} =
if n = 0,
⎧ X[0],
Therefore,
11.27 r[ n] = X[⟨− n⟩ N ] = ⎨
−
X
N
n
n ≠ 0.
[
],
if
⎩
R[ k ] =
N −1
∑
r[ n]WNnk
n=0
N −1
= X [ 0] +
= r[0] +
x[ n] =
∑
r[ n]WNnk
n =1
N −1
= X [ 0] +
N −1
∑ X[ N − n]WNnk
n =1
N −1
X[ n]WN− nk =
X[ n]WN− nk
n=0
n =1
∑ X[n]WN( N − n)k = X[0] + ∑
n =1
1
N
N −1
∑
= N ⋅ x[ k ]. Thus,
⋅R[ k ] k = n .
11.28 Let y[n] denote the result of convolving a length-L sequence x[n] with a length-N sequence
h[n]. The length of y[n] is then L + N – 1. Here L = 16 and N = 9, hence length of y[n] is 24.
Method #1: Direct linear convolution - For a length-L sequence x[n] and a length-N sequence
h[n],
# of real mult. = 2
N
9
n =1
n=1
∑ n + N (L − N − 1) = 2∑ n + 9(16 − 9 − 1) = 135 .
Method # 2: Linear convolution via circular convolution - Since y[n] is of length 24, to get
the correct result we need to pad both sequences with zeros to increase their lengths to 24
before carrying out the circular convolution.
# of real mult. = 24 ×24 = 576.
Not for sale
401
Method #3: Linear convolution via radix-2 FFT - The process involves computing the 16point FFT G[k ] of the length-16 complex sequence g[ n] = x[ n] + j he [ n], where he [n] is
obtained by zero-padding h[n] to length 16. Then, the 16-point DFTs, X [k ] and H e [k ], of
x[n] and he [n] , respectively, are recovered from G[k ] . Finally, the IDFT of the product
Y [ k ] = X[ k ] ⋅ H e [ k ] yields y[n].
Now, the first stage of the 16-point radix-2 FFT requires 0 complex multiplications, the
second stage requires 0 complex multiplications, the third stage requires 4 complex
multiplications, and the last stage requires 6 complex multiplications, resulting in a total of
10 complex multiplications.
# of complex mult. to implement G[k ] = 10
# of complex mult. to recover X [k ] and H e [k ] from G[k ] = 0
# of complex mult. to form Y [k ] = 16
# of complex mult. to form the IDFT of Y [k ] = 10
Hence, the total number of complex mult. = 36
A direct implementation of a complex multiplication requires 4 real multiplications resulting
in a total of 4× 36 = 144 real multiplications for Method #3. However, if a complex multiply
can be implemented using 3 real multiplies (see Problem 11.13), in which case Method #3
requires a total of 3× 36 = 108 real multiplications.
11.29 Let y[n] denote the result of convolving a length-L sequence x[n] with a length-N sequence
h[n]. The length of y[n] is then L + N – 1. Here, L = 16 and N = 10, hence length of y[n] is
25.
Method #1: Direct linear convolution - For a length-L sequence x[n] and a length-N sequence
h[n],
# of real mult. = 2
N
10
n=1
n=1
∑ n + N (L − N − 1) = 2∑ n + 10(16 − 10 − 1) = 160 .
Method # 2: Linear convolution via circular convolution - Since y[n] is of length 24, to get
the correct result we need to pad both sequences with zeros to increase their lengths to 24
before carrying out the circular convolution.
# of real mult. = 25 ×25 = 625.
Method #3: Linear convolution via radix-2 FFT - The process involves computing the 16point FFT G[k ] of the length-16 complex sequence g[ n] = x[ n] + j he [ n], where he [n] is
obtained by zero-padding h[n] to length 16. . Then, the 16-point DFTs, X [k ] and H e [k ], of
x[n] and he [n] , respectively, are recovered from G[k ] . Finally, the IDFT of the product
Y [ k ] = X[ k ] ⋅ H e [ k ] yields y[n].
Now, the first stage of the 16-point radix-2 FFT requires 0 complex multiplications, the
second stage requires 0 complex multiplications, the third stage requires 4 complex
Not for sale
402
multiplications, and the last stage requires 6 complex multiplications resulting in a total of 10
complex multiplications.
# of complex mult. to implement G[k ] = 10
# of complex mult. to recover X [k ] and H e [k ] from G[k ] = 0
# of complex mult. to form Y [k ] = 16
# of complex mult. to form the IDFT of Y [k ] = 10
Hence, the total number of complex mult. = 36
A direct implementation of a complex multiplication requires 4 real multiplications resulting
in a total of 4× 36 = 144 real multiplications for Method #3. However, if a complex multiply
can be implemented using 3 real multiplies (see Problem 11.13), in which case Method #3
requires a total of 3× 36 = 108 real multiplications.
11.30 (a) Since the impulse response of the filter is of length 72, the transform length N should be
greater than 72. If L denotes the number of input samples used for convolution, then L = N –
71. So for every L samples of the input sequence, an N -point DFT is computed and
multiplied with an N -point DFT of the impulse response sequence h[n] (which needs to be
computed only once), and finally an N -point inverse of the product sequence is evaluated.
Hence, the total number R M of complex multiplications required (assuming N is a powerN
2048 ⎤
( N log 2 N + N ) + log 2 N .
of-2) is given by R M = ⎡
2
⎢ N − 71 ⎥
It should be noted that in developing the above expression, multiplications due to twiddle
factors of values ±1 and ± j have not been excluded. The values of R M for different values
of N are as follows:
1) For N = 128, R M = 37312, 2) For N = 256, R M = 28672, 3) For N = 512, R M =
27904, 4) For N = 1024, R M = 38912.
Hence, N = 512 is the appropriate choice for the transform length requiring 27904 complex
multiplications or equivalently, 27904 × 3 = 83712 real multiplications.
Since the first stage of the FFT calculation process requires only multiplications by ±1, the
total number of complex multiplications for N = 128 is actually
N
N
2048 ⎤
RM = ⎡
( N log 2 N + N ) + log 2 N − = 27648, or equivalently, 27648× 3 = 82944
⎢ N − 71 ⎥
2
2
real multiplications.
(b) For direct convolution, # of real multiplications =
N
2
∑
n=1
n + N ( L − N − 1) = 2
72
∑ n + 72(2048 − 72 − 1) = 147456 .
n =1
11.31 (a)
Not for sale
403
⎡1
⎢
⎢0
⎢0
⎢
⎢0
V8 = ⎢
⎢1
⎢0
⎢
⎢0
⎢0
⎣
⎡1
⎢
⎢1
⎢0
⎢
⎢0
V2 = ⎢
⎢0
⎢0
⎢
⎢0
⎢0
⎣
0 0 0 W80
1 0 0
0
0
0
W81
0
0 1 0
0
0
W82
0 0 1
0
0
0
0 0 0
W84
0
0
1 0 0
0
W85
0
0 1 0
0
0
W86
0 0 1
0
0
0
0 ⎤
⎥
0 ⎥
0 ⎥
⎥
W83 ⎥
⎥,
0 ⎥
0 ⎥
⎥
0 ⎥
W87 ⎥⎦
W80
0
0
0
0
0
W84
0
0
0
0
0
0
1 W80
0
0
0
0
W84
0
0
0
0
0
1
0
0
0
1
0
0
0
1
W80
W84
0
0
0
0
0
1
0
0
0
0
0
1
⎡1
⎢
⎢0
⎢1
⎢
⎢0
V4 = ⎢
⎢0
⎢0
⎢
⎢0
⎢0
⎣
0 ⎤
⎥
0 ⎥
0 ⎥
⎥
0 ⎥ E=
⎥,
0 ⎥
0 ⎥
⎥
W80 ⎥
W84 ⎥⎦
⎡1
⎢0
⎢0
⎢0
⎢0
⎢0
⎢0
⎢⎣0
0 W80
0
0 0
0
1
0
W82
0 0
0
0
W80
0
0 0
0
1
0
W82
0 0
0
0
0
0
1 0 W80
0
0
0
0 1
0
0
0
1 0 W80
0
0
0
0 1
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0 ⎤
⎥
0 ⎥
0 ⎥
⎥
0 ⎥
⎥,
0 ⎥
W82 ⎥
⎥
0 ⎥
W82 ⎥⎦
0⎤
0⎥
0⎥
0 ⎥.
0⎥
0⎥
0⎥
1⎥⎦
As can be seen from the above, multiplication by each matrix Vk , k = 1, 2, 3, requires at most
8 complex multiplications.
(b) The transpose of the matrices given in Part (a) are as follows:
⎡ 1 0 0 0 1 0 0 0 ⎤
⎡ 1 0 1 0 0 0 0 0 ⎤
⎢ 0 1 0 0 0 1 0 0 ⎥
⎢ 0 1 0 1 0 0 0 0 ⎥
⎢ 0 0 1 0 0 0 1 0 ⎥
⎢W 0 0 W 0 0 0 0 0 0 ⎥
8
⎢ 0 0 0 1 0 0 0 1 ⎥
⎢ 8
⎥
2 0 W2 0
W
0
0 0 0 ⎥
0
0
⎥
⎢W
⎢
t
t
8
8
0
0
0
0
0
0
W
V8 = ⎢ 8
8
⎥, V4 = ⎢ 0 0 0 0 1 0 1 0 ⎥,
1
1
⎢ 0 W8 0 0 0 W8 0 0 ⎥
⎢ 0 0 0 0 0 1 0 1 ⎥
⎢ 0 0 W2 0 0 0 W2 0 ⎥
⎢ 0 0 0 0 W0 0 W0 0 ⎥
8
8
8
8
⎥
⎢
⎢
⎥
2
2⎥
⎢ 0 0 0 W3 0 0 0 W3⎥
⎢
W
W
0
0
0
0
0
0
8
8 ⎦
⎣
8
8 ⎦
⎣
⎡ 1 1 0 0 0 0 0 0 ⎤
⎢W 0 W 4 0 0 0 0 0 0 ⎥
8
⎢ 8
⎥
0
0
1 1 0 0 0 0 ⎥
⎢
0 0 W80 W84 0 0 0 0 ⎥ E t = E =
V2t = ⎢⎢
,
0 0 0 0 1 1 0 0 ⎥
⎢ 0 0 0 0 W0 W4 0 0 ⎥
8
8
⎢
⎥
⎢ 0 0 0 0 0 0 1 1 ⎥
⎢⎣ 0 0 0 0 0 0 W80 W84 ⎥⎦
⎡1
⎢0
⎢0
⎢0
⎢0
⎢0
⎢0
⎢⎣0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
1
0
0
0
0
0
0
0
0
0
0
0
1
0
0
0
0
0
1
0
0
0
0
0⎤
0⎥
0⎥
0 ⎥.
0⎥
0⎥
0⎥
1⎥⎦
It is easy to show that the flow-graph representation of D8 = E t V2t V4t V8t is precisely the 8point DIF FFT algorithm of Figure 11.28.
Not for sale
404
11.32 X [2l] =
n+
N
2
N −1
∑
n=0
x[ n]WN2 ln =
N
−1
2
N −1
n=0
n= N / 2
∑
∑ x[n]WN2ln , 0 ≤ l ≤ 2 − 1.
x[ n]WN2ln +
N
Replacing n by
in the right-most sum we get
X [ 2l ] =
N
−1
2
N
−1
2
n=0
n=0
N
−1
2
∑ x[n]WN2ln + ∑ x[n + 2 ]WN2ln = ∑ ⎛⎜⎝ x[n] + x[n + 2 ]⎞⎟⎠WNln/ 2 , 0 ≤ l ≤ 2 − 1.
N
N
N
n=0
Likewise,
X[ 4l + 1] =
N
−1
4
∑
n=0
where 0 ≤ l ≤
x[ n]WN( 4l + 1)n
N
4
+
∑
+
n=
x[ n]WN( 4l + 1)n
3N
4
N
4
+
N
2
N −1
∑ x[n]WN(4l +1)n ,
n=
3N
4
N
2
in the third
in the fourth sum, we get
N
−1
4
N
−1
4
n=0
N
−1
4
n=0
∑ x[n]WN4lnWNn + ∑ x[n + 4 ]WN4lnWNn WNlN WNN / 4
N
N
−1
4
∑ x[n + 2 ]WN4lnWNn WN2lN WNN / 2 + ∑ x[n +
N
N
−1
4
n=0
WNN / 2
N
N
n=0
N
−1
4
N
−1
4
N
−1
4
n=0
n=0
3N
]WN4lnWNn WN3lN WN3 N / 4 .
4
= −1, and WN3 N / 4 = + j. Therefore,
∑ ⎧⎨⎩⎛⎜⎝ x[n] − x[n + 2 ]⎞⎟⎠ − j⎛⎜⎝ x[n + 4 ] − x[n +
Similarly, X [ 4l + 3] =
N
3 N ⎞ ⎫ n ln
]⎟ ⎬W W
, 0 ≤ l ≤ − 1.
4 ⎠⎭ N N / 4
4
∑ x[n]WN(4l + 3)n + ∑ x[n + 4 ]WN(4l + 3)nWN(4l + 3)N / 4
N
N
−1
4
∑ x[n + 2 ]WN(4l + 3)nWN(4l + 3)N / 2 + ∑ x[n +
N
n=0
=
x[ n]WN( 4l + 1)n
in the second sum, n by n +
Now, WNlN = WN2 lN = WN3lN = 1, WNN / 4 = − j,
+
∑
n=
n=0
X [ 4l + 1] =
+
3N
−1
4
N
4
− 1. Replacing n by n +
sum, and n by n +
X [ 4l + 1] =
N
−1
2
n=0
N
−1
4
N
−1
4
n=0
n=0
3N
]WN( 4l + 3)nWN( 4l + 3)3 N / 4
4
∑ x[n]WN4lnWN3n + ∑ x[n + 4 ]WN4lnWN3nWNlN WN3N / 4
N
Not for sale
405
+
N
−1
4
N
−1
4
∑ x[n + 2 ]WN4lnWN3nWN2lN WN6 N / 4 + ∑ x[n + 4 ]WN4lnWN3nWN3lN WN9 N / 4
N
n=0
=
N
−1
4
n=0
∑ ⎧⎨⎩⎛⎜⎝ x[n] − x[n + 2 ]⎞⎟⎠ + j⎛⎜⎝ x[n + 4 ] − x[n +
n=0
N
N
N
N
3 N ⎞ ⎫ 3 n ln
]⎟ ⎬W WN / 4 , 0 ≤ l ≤ − 1.
4
4 ⎠⎭ N
The butterfly here is as shown below which is seen to require two complex multiplications.
11.33 From the flow-graph of the 8-point split-radix FFT algorithm given below it can be seen
that the total number of complex multiplications required is 2. On the other hand, the total
number of complex multiplications required for a standard DIF FFT algorithm is also 2.
11.34 If multiplications by ± j, ± 1 are ignored, the flow-graph shown below requires 8 complex
multiplications = 24 real multiplications. A radix-2 DIF 16-point FFT algorithm, on the
other hand requires 10 complex multiplications = 30 real multiplications.
Not for sale
406
0 ≤ n1 ≤ 3,
11.35 (a) N = 12. Choose N1 = 4 and N 2 = 3. Thus, n = n1 + 4 n2 , ⎧⎨
and
0
⎩ ≤ n 2 ≤ 2,
⎧ 0 ≤ k1 ≤ 3, The corresponding index mappings are indicated below:
k = 3k1 + k 2 , ⎨
⎩0 ≤ k 2 ≤ 2.
k
n
1
3
2
1
3
2
k2 1 0
n2 1 0
X[0] X[3] X[6] X[9]
x[0] x[1] x[2] x[3]
0
0
X[1] X[4] X[7] X[10]
x[4] x[5] x[6] x[7]
1
1
2 X[2] X[5] X[8] X[11]
2 x[8] x[9] x[10] x[11]
0 ≤ n1 ≤ 2,
N = 15. Choose N1 = 3 and N 2 = 5. Thus, n = n1 + 3n2 , ⎧⎨
and
⎩0 ≤ n2 ≤ 4,
⎧ 0 ≤ k1 ≤ 2, The corresponding index mappings are indicated below:
k = 5k1 + k 2 , ⎨
⎩0 ≤ k 2 ≤ 4.
(b)
n
n2 1 0
x[0]
0
x[3]
1
x[6]
2
3
x[9]
4
1
x[1]
x[4]
x[7]
2
x[2]
x[5]
x[8]
x[10] x[11]
x[12] x[13] x[14]
Not for sale
k
k2 1 0
X[0]
0
X[1]
1
X[2]
2
3
X[3]
4
1
2
X[5] X[10]
X[6] X[11]
X[7] X[12]
X[8] X[13]
X[4] X[9] X[14]
407
0 ≤ n1 ≤ 6,
(c) N = 21. Choose N1 = 7 and N 2 = 3. Thus, n = n1 + 7n2 , ⎧⎨
and
⎩0 ≤ n2 ≤ 2,
⎧ 0 ≤ k1 ≤ 6, The corresponding index mappings are indicated below:
k = 3k1 + k 2 , ⎨
⎩0 ≤ k 2 ≤ 2.
n
n2 1 0
x[0]
0
1
x[7]
2 x[14]
1
x[1]
x[8]
2
3
4
5
x[2] x[3] x[4] x[5]
x[9] x[10] x[11] x[12]
x[15] x[16] x[17] x[18] x[19]
6
x[6]
x[13]
x[20]
k
4
5
6
1
3
2
k2 1 0
X[18]
X[3]
X[15]
X[6] X[9] X[12]
X[0]
0
1
X[1] X[4] X[7] X[10] X[13] X[16] X[19]
2
X[2] X[5] X[8] X[11] X[14] X[17] X[20]
0 ≤ n1 ≤ 6,
(d) N = 35. Choose N1 = 7 and N 2 = 5. Thus, n = n1 + 7n2 , ⎧⎨
and
0
⎩ ≤ n 2 ≤ 4,
⎧ 0 ≤ k1 ≤ 6, The corresponding index mappings are indicated below:
k = 5k1 + k 2 , ⎨
⎩0 ≤ k 2 ≤ 4.
n
1
2
n2 1 0
x[0] x[1] x[2]
0
x[7] x[8] x[9]
1
2 x[14] x[15] x[16]
3 x[21] x[22] x[23]
4
3
4
5
x[3] x[4] x[5]
x[10] x[11] x[12]
x[17] x[18] x[19]
x[13]
x[20]
x[24] x[25] x[26]
x[27]
x[28] x[29] x[30] x[31] x[32] x[33]
x[34]
k
4
5
1
3
2
k2 1 0
X[0] X[5] X[10] X[15] X[20] X[25]
0
1
X[1] X[6] X[11] X[16] X[21] X[26]
2 X[2] X[7] X[12] X[17] X[22] X[27]
3 X[3] X[8] X[13] X[18] X[23] X[28]
4
6
x[6]
6
X[30]
X[31]
X[32]
X[33]
X[4] X[9] X[14] X[19] X[24] X[29] X[34]
11.36 (a) N = 12. Choose N1 = 4 and N 2 = 3. A = 3, B = 4, C = 3⟨3 −1 ⟩ 4 = 9,
⎧ 0 ≤ n1 ≤ 3,
D = 4⟨ 4 −1 ⟩ 3 = 4. Thus, n = ⟨3n1 + 4 n2 ⟩ 12 , ⎨
k = ⟨ 9k1 + 4 k 2 ⟩ 12 ,
⎩0 ≤ n2 ≤ 2,
The corresponding index mappings are indicated below:
n
1
3
2
n2 1 0
x[0] x[3] x[6] x[9]
0
x[4] x[7] x[10] x[1]
1
2 x[8] x[11] x[2] x[5]
⎧ 0 ≤ k1 ≤ 3,
⎨0 ≤ k ≤ 2.
2
⎩
k
1
3
2
k2 1 0
X[0] X[9] X[6] X[3]
0
X[4] X[1] X[10] X[7]
1
2 X[8] X[5] X[2] X[11]
(b) N = 15. Choose N1 = 3 and N 2 = 5. A = 5, B = 3, C = 5⟨5 −1 ⟩ 3 = 10, D = 3⟨3 −1 ⟩ 5 = 6.
Not for sale
408
0 ≤ n1 ≤ 2,
Thus, n = ⟨ 5n1 + 3n2 ⟩ 15 , ⎧⎨
k = ⟨10 k1 + 6 k 2 ⟩ 15 ,
0
⎩ ≤ n 2 ≤ 4,
The corresponding index mappings are indicated below:
n
n2 1 0
x[0]
0
x[3]
1
x[6]
2
3 x[9]
4
1
2
x[5] x[10]
x[8] x[13]
x[11] x[1]
x[14] x[4]
x[12] x[2]
x[7]
⎧ 0 ≤ k1 ≤ 2,
⎨0 ≤ k ≤ 4.
2
⎩
k
1
2
k2 1 0
X[0] X[10] X[5]
0
X[6] X[1] X[11]
1
X[12] X[7] X[2]
2
3
X[3] X[13] X[8]
4 X[9] X[4] X[14]
(c) N = 21. Choose N1 = 7 and N 2 = 3. A = 3, B = 7, C = 3⟨3 −1 ⟩ 4 = 3 × 5 = 15,
⎧ 0 ≤ n1 ≤ 6,
D = 7⟨ 7 −1 ⟩ 3 = 7 × 1 = 7. Thus, n = ⟨3n1 + 7n2 ⟩ 21 , ⎨
⎩0 ≤ n2 ≤ 2,
⎧ 0 ≤ k1 ≤ 6, The corresponding index mappings are indicated
k = ⟨15k1 + 7k 2 ⟩ 21 , ⎨
⎩0 ≤ k 2 ≤ 2.
below:
n
4
5
6
1
3
2
n2 1 0
x[18]
x[0] x[3] x[6] x[9] x[12] x[15]
0
1
x[7] x[10] x[13] x[16] x[19] x[1] x[4]
2 x[14] x[17] x[20] x[2] x[5] x[8] x[11]
k
4
5
6
1
3
2
k2 1 0
X[0] X[15] X[9] X[3] X[18] X[12] X[6]
0
1
X[7] X[1] X[16] X[10] X[4] X[19] X[13]
2
X[14] X[8] X[2] X[17] X[11] X[5] X[20]
(d) N = 35. Choose N1 = 7 and N 2 = 5. A = 5, B = 7, C = 5⟨ 5 −1 ⟩ 7 = 5 × 3 = 15,
⎧ 0 ≤ n1 ≤ 6,
D = 7⟨7 −1 ⟩ 5 = 7 × 3 = 21. Thus, n = ⟨ 5n1 + 7n2 ⟩ 35 , ⎨
⎩0 ≤ n2 ≤ 4,
⎧ 0 ≤ k1 ≤ 6, The corresponding index mappings are indicated
k = ⟨15k1 + 21k 2 ⟩ 35 , ⎨
⎩0 ≤ k 2 ≤ 4.
below:
n
1
3
2
n2 1 0
x[0] x[5] x[10] x[15]
0
x[7] x[12] x[17] x[22]
1
2 x[14] x[19] x[24] x[29]
3 x[21] x[26] x[31] x[1]
4
4
5
x[20] x[25]
x[27] x[32]
x[34] x[4]
6
x[30]
x[2]
x[9]
x[6] x[11]
x[16]
x[28] x[33] x[3] x[8] x[13] x[18]
x[23]
k
4
5
6
1
3
2
k2 1 0
X[0] X[15] X[30] X[10] X[25] X[5] X[20]
0
X[21] X[1] X[16] X[31] X[11] X[26] X[6]
1
2
X[7] X[22] X[2] X[17] X[32] X[12] X[27]
3 X[28] X[8] X[23] X[3] X[18] X[33] X[13]
4
X[14] X[29] X[9] X[24] X[4] X[19] X[34]
Not for sale
409
11.37 N = 12. Choose N1 = 4 and N 2 = 3. A = 3, B = 4, C = 3⟨3 −1 ⟩ 4 = 9, D = 4⟨ 4 −1 ⟩ 3 = 4.
0 ≤ n1 ≤ 3,
⎧ 0 ≤ k1 ≤ 3,
Thus, n = ⟨3n1 + 4 n2 ⟩ 12 , ⎧⎨
k = ⟨ 9k1 + 4 k 2 ⟩ 12 , ⎨
⎩0 ≤ n2 ≤ 2,
⎩0 ≤ k 2 ≤ 2.
The corresponding index mappings are indicated below:
n
1
3
2
n2 1 0
x[0] x[3] x[6] x[9]
0
x[4] x[7] x[10] x[1]
1
2 x[8] x[11] x[2] x[5]
k
1
3
2
k2 1 0
X[0] X[9] X[6] X[3]
0
X[4] X[1] X[10] X[7]
1
2 X[8] X[5] X[2] X[11]
0 ≤ n1 ≤ 3,
Alternately, k = ⟨ 9n1 + 4 n2 ⟩ 12 , ⎧⎨
k = ⟨3k1 + 4 k 2 ⟩ 12 ,
⎩0 ≤ n2 ≤ 2,
The corresponding index mappings are indicated below:
n
1
3
2
n2 1 0
x[0] x[9] x[6] x[3]
0
x[4] x[1] x[10] x[7]
1
2 x[8] x[5] x[2] x[11]
⎧ 0 ≤ k1 ≤ 3,
⎨0 ≤ k ≤ 2.
2
⎩
k
1
3
2
k2 1 0
X[0] X[3] X[6] X[9]
0
X[4] X[7] X[10] X[1]
1
2 X[8] X[11] X[2] X[5]
Hence, X [2 k ] = Y [2 k ], and X [2k + 1] = Y [⟨6 + (2k + 1)⟩12 ], k = 0,1,K,5.
11.38 (a) N = 6. Choose N1 = 2 and N 2 = 3. A = 3, B = 2, C = 3⟨3 −1 ⟩ 2 = 3, D = 2⟨ 2 −1 ⟩ 3 = 4.
0 ≤ n1 ≤ 1,
⎧ 0 ≤ k1 ≤ 1,
Thus, n = ⟨3n1 + 2 n2 ⟩ 6 , ⎧⎨
k = ⟨3k1 + 4 k 2 ⟩ 6 , ⎨
⎩0 ≤ n2 ≤ 2,
⎩0 ≤ k 2 ≤ 2.
The corresponding index mappings are indicated below:
n
1
n2 1 0
x[0] x[3]
0
x[2] x[5]
1
2 x[4] x[1]
x[0]
x[3]
x[2]
x[5]
x[4]
x[1]
n
1
k2 1 0
G[0,0] G[1,0]
0
G[0,1] G[1,1]
1
2 G[0,2] G[1,2]
G[0,0]
2-pt
DFT G[1,0]
k
1
k2 1 0
X[0] X[3]
0
X[4] X[1]
1
2 X[2] X[5]
X[0]
3-pt
DFT
X[4]
X[2]
G[0,1]
2-pt
DFT G[1,1]
G[0,2]
2-pt
DFT G[1,2]
Not for sale
X[3]
3-pt
DFT
X[1]
X[5]
410
(b) N = 10. Choose N1 = 2 and N 2 = 5. A = 5, B = 2, C = 5⟨5 −1 ⟩ 2 = 5, D = 2⟨ 2 −1 ⟩ 5 = 6.
0 ≤ n1 ≤ 4,
⎧ 0 ≤ k1 ≤ 4,
Thus, n = ⟨ 5n1 + 2 n2 ⟩ 10 , ⎧⎨
k = ⟨ 5k1 + 6 k 2 ⟩ 10 , ⎨
n
≤
≤
,
0
2
2
⎩
⎩0 ≤ k 2 ≤ 2.
The corresponding index mappings are indicated below:
n
1
n2 1 0
x[0] x[5]
0
x[2] x[7]
1
x[4] x[9]
2
x[6] x[1]
3
x[8] x[3]
4
x[0]
x[5]
x[2]
x[7]
x[4]
x[9]
x[6]
x[1]
x[8]
x[3]
n
1
k2 1 0
G[0,0] G[1,0]
0
G[0,1] G[1,1]
1
G[0,2] G[1,2]
2
G[0,3] G[1,3]
3
G[1,4]
G[0,4]
4
k
1
k2 1 0
X[0] X[5]
0
X[6] X[1]
1
2 X[2] X[7]
3 X[8] X[3]
4 X[4] X[9]
G[0,0]
X[0]
2-pt
DFT G[1,0]
G[0,1]
2-pt
DFT G[1,1]
X[6]
5-pt
DFT
X[2]
X[8]
X[4]
G[0,2]
2-pt
DFT G[1,2]
X[5]
G[0,3]
2-pt
DFT G[1,3]
G[0,4]
2-pt
DFT G[1,4]
X[1]
5-pt
DFT
X[7]
X[3]
X[9]
(c) N = 12. Choose N1 = 3 and N 2 = 4. A = 4, B = 3, C = 4⟨ 4 −1 ⟩ 3 = 4, D = 3⟨3 −1 ⟩ 4 = 3.
0 ≤ n1 ≤ 2,
⎧ 0 ≤ k1 ≤ 2,
Thus, n = ⟨ 4 n1 + 3n2 ⟩ 12 , ⎧⎨
k = ⟨ 4 k1 + 3k 2 ⟩ 12 , ⎨
n
0
≤
≤
3
,
2
⎩
⎩0 ≤ k 2 ≤ 3.
The corresponding index mappings are indicated below:
n
n2 1 0
x[0]
0
x[3]
1
2 x[6]
3 x[9]
1
2
x[4] x[8]
x[7] x[11]
x[10] x[2]
x[1] x[5]
k
1
2
n2 1 0
G[0,0] G[1,0] G[2,0]
0
G[0,1] G[1,1] G[2,1]
1
2 G[0,2] G[1,2] G[2,2]
3 G[0,3] G[1,3] G[2,3]
Not for sale
k
k2 1 0
X[0]
0
X[3]
1
2 X[6]
3 X[9]
1
2
X[4]
X[7]
X[10]
X[1]
X[8]
X[11]
X[2]
X[5]
411
G[0,0]
x[0]
x[4]
x[8]
3-pt
DFT G[2,0]
x[11]
G[2,2]
x[9]
G[0,3]
x[1]
x[5]
4-pt
DFT
3-pt G[1,2]
x[2]
X[6]
X[4]
G[0,2]
DFT
X[3]
X[9]
3-pt G[1,1]
DFT G[2,1]
x[6]
x[10]
4-pt
DFT
G[0,1]
x[3]
x[7]
X[0]
G[1,0]
X[7]
X[10]
X[1]
X[8]
4-pt
DFT
G[1,3]
3-pt
DFT G[2,3]
X[11]
X[2]
X[5]
(d) N = 15. Choose N1 = 5 and N 2 = 3. A = 3, B = 5, C = 3⟨3 −1 ⟩ 5 = 10,
⎧ 0 ≤ n1 ≤ 4,
⎧0 ≤ k1 ≤ 4,
D = 5⟨ 5 −1 ⟩ 3 = 6. Thus, n = ⟨ 5n1 + 3n2 ⟩ 10 , ⎨
k = ⟨10 k1 + 6 k 2 ⟩ 10 , ⎨
n
0
≤
≤
2
,
2
⎩
⎩0 ≤ k 2 ≤ 2.
The corresponding index mappings are indicated below:
n
n
1
2
3
2
4
1
3
k2 1 0
n2 1 0
G[0,0] G[1,0] G[2,0] G[3,0]
0
x[0] x[3] x[6] x[9] x[12]
0
1
x[5] x[8] x[11] x[14] x[2]
1
G[0,1] G[1,1] G[2,1] G[3,1]
x[1]
x[10]
x[13]
x[4]
G[0,2] G[1,2] G[2,2] G[3,2]
x[7]
2
2
k
k2 1 0
X[0]
0
1 X[10]
X[5]
2
1
2
3
4
X[6] X[12] X[3] X[9]
X[1] X[7] X[13] X[4]
X[11] X[2] X[8] X[14]
Not for sale
412
G[0,0]
x[0]
G[0,1]
x[3]
5-pt G[0,2]
DFT G[0,3]
x[6]
x[9]
x[12]
G[0,4]
G[1,0]
G[1,1]
x[5]
x[8]
5-pt G[1,2]
DFT G[1,3]
x[11]
x[14]
x[2]
X[0]
3-pt
DFT
X[5]
3-pt
DFT
x[10]
x[13]
5-pt G[2,2]
DFT G[2,3]
x[1]
x[4]
G[2,4]
x[7]
X[6]
X[1]
X[11]
X[12]
3-pt
DFT
X[7]
X[2]
G[1,4]
G[2,0]
G[2,1]
X[10]
X[3]
3-pt
DFT
X[13]
X[8]
3-pt
DFT
X[9]
X[4]
X[14]
11.39 Note that 1536 = 256 × 6. Now an N -point DFT , with N divisible by 6, can be computed
as follows: X[ k ] =
N −1
∑ x[n]WNnk = X 0 [⟨ k⟩ N / 6 ] + WNk X1[⟨ k⟩ N / 6 ] + WN2k X 2 [⟨ k⟩ N / 6 ]
n=0
k
3
+ WN X 3 [⟨ k ⟩ N / 6 ] + WN4 k X 4 [⟨ k ⟩ N / 6 ] + WN5k X 5 [⟨ k ⟩ N / 6 ], where
N
−1
6
X l [⟨ k ⟩ N / 6 ] =
x[6r + l]WNrk/ 6 , 0 ≤ l ≤ 5. For N = 1536, we thus get
r =0
k X [⟨ k ⟩
2k
3k
X[ k ] = X 0 [⟨ k ⟩ 256 ] + W1536
1
256 ] + W1536 X 2 [ ⟨ k ⟩ 256 ] + W1536 X 3 [ ⟨ k ⟩ 256 ]
5111
rk ,
4
5
k
k
+ W1536 X 4 [⟨ k ⟩ 256 ] + W1536 X 5 [⟨ k ⟩ 256 ], where X l [⟨ k ⟩ 256 ] =
x[6r + l]W256
r =0
∑
∑
x000[n] 256-point X000 [ k 256 ]
6
DFT
x[n]
z
6
z
z
x [n] 256-point X [ k 256 ]
010
6 010
DFT
6
z
6
z
x001[n] 256-point X001 [ k 256 ]
DFT
x011[n] 256-point X [
011 k 256 ]
DFT
x100[n]
]
X [
256-point 100 k 256
DFT
x101[n] 256-point X101 [ k 256 ]
6
DFT
Not for sale
0 ≤ l ≤ 5.
X[k]
k
W768
k
W768
k
W1536
k
W768
k
W768
413
Now an N-point FFT algorithm requires
complex additions. Hence, an
multiplications and
N
6
N
6
N
2
log 2 N complex multiplications and N log 2 N
-point FFT algorithm requires
N
log 2 ( N / 6)
12
complex
log 2 ( N / 6) complex additions. In addition, we need 5N complex
multiplications and 5N complex additions to compute the N-point DFT X[k]. Hence, for N =
1536, the evaluation of X [k ] using six 256-point FFT modules requires
= 128 × log 2 (256) + 5 × 1536 = 8704 complex multiplications and
N
6
N
log 2 ( N / 6) + 5N
12
log 2 ( N / 6) + 5N
= 256 × log 2 (256) + 5 × 1536 = 9728 complex additions. It should be noted that a direct
computation of the 3072-point DFT would require 6431296 complex multiplications and
2357760 complex additions.
11.40 (a) # of zero-valued samples to be added is 512 – 498 = 14.
(b) Direct computation of a 512-point DFT of a length-498 sequence requires (498)2 =
248004 complex multiplications and 497 ×498 = 247506 complex additions.
(c) A 512-point Cooley-Tukey type FFT algorithm requires 256 × log 2 (512) = 2304 complex
multiplications and 512 × log 2 (512) = 46308 complex additions.
11.41 z l = α l . Hence, AoVo− l e jθ o e − jlφ o = α l . Since α is real, we have Ao = 1, Vo = 1 / α,
θ o = 0, φ o = 0.
11.42 (a) Y ( z ) = H ( z ) X ( z ) or y[ 0] + y[1]z −1 + y[ 2]z −2 = (h[ 0] + h[1]z −1 )( x[ 0] + x[1]z −1 ). Now,
Y ( z 0 ) = Y (−1) = y[0] − y[1] + y[2] = H (−1) X (−1) = (h[0] − h[1])( x[0] − x[1]),
Y ( z1 ) = Y (∞) = y[0] = H (∞) X (∞ ) = h[0]x[0],
Y ( z 2 ) = Y (1) = y[0] + y[1] + y[2] = H (1) X (1) = {h[0] + h[1])( x[0] + x{1}).
From Eqs. (6.114) and (6.115), we arrive at
I ( z)
I (z)
I ( z)
Y (z0 ) + 1
Y ( z1 ) + 2
Y ( z 2 ), where I 0( z ) = (1 − z1z −1 )(1 − z 2 z −1 ),
Y ( z) = 0
I 0 (z0 )
I1 ( z1 )
I 2 (z2 )
I 1( z ) = (1 − z 0 z −1 )(1 − z 2 z −1 ), I 2( z ) = (1 − z 0 z −1 )(1 − z1z −1 ). Therefore,
I 0 ( z)
(1 − z1 z −1 )(1 − z 2 z −1 )
1
=
= − z −1 (1 − z −1 ),
2
I 0 ( z 0 ) (1 − z1 z 0−1 )(1 − z 2 z 0−1 )
I1 ( z) (1 − z 0 z −1 )(1 − z 2 z −1 )
=
= (1 − z − 2 ), and
−
1
−
1
I1 ( z1 ) (1 − z 0 z1 )(1 − z 2 z1 )
I 2 ( z) (1 − z 0 z −1 )(1 − z1 z −1 ) 1 −1
=
= z (1 + z −1 ). Hence,
1
1
−
−
I 2 ( z 0 ) (1 − z 0 z 2 )(1 − z1 z 2 ) 2
Not for sale
414
Y ( z ) = − z −1 (1 − z −1 )Y ( z 0 ) + (1 − z − 2 )Y ( z1 ) + z −1 (1 + z −1 )Y ( z 2 )
1
2
1
2
1
1
1
1
= Y ( z1 ) + ⎛⎜ − Y ( z 0 ) + Y ( z 2 ) ⎞⎟ z −1 + ⎛⎜ Y ( z 0 ) − Y ( z1 ) + Y ( z 2 ) ⎞⎟ z − 2
2
2
⎝ 2
⎠
⎝2
⎠
1
1
= h[0]x[0] + ⎛⎜ − (h[0] − h[1])( x[0] − x[1]) + (h[0] + h[1])( x[0] + x[1]) ⎞⎟ z −1
2
⎝ 2
⎠
1
1
+ ⎛⎜ (h[0] − h[1])( x[0] − x[1]) − h[0]x[0] + (h[0] + h[1])( x[0] + x[1]) ⎞⎟ z − 2
2
⎝2
⎠
−
1
−
2
= h[ 0] x[ 0] + (h[ 0] x[1] + h[1] x[ 0])z + h[1] x[1]z .
Ignoring the multiplications by
1
,
2
computation of the coefficients of Y ( z ) require the values
of Y ( z 0 ), Y ( z1 ), and Y ( z2 ) , which can be evaluated using only 3 multiplications.
(b) Y ( z ) = H ( z ) X ( z ) or
(
)(
)
y[ 0] + y[1]z −1 + y[2]z − 2 + y[3]z − 3 + y[ 4]z − 4 = h[ 0] + h[1]z −1 + h[ 2]z − 2 x[ 0] + x[1]z −1 + x[ 2]z − 2 .
Now,
1
2
Y ( z 0 ) = Y (− ) = (h[0] − 2h[1] + 4h[2])( x[0] − 2 x[1] + 4 x[2]),
Y ( z1 ) = Y (−1) = (h[0] − h[1] + h[2])( x[0] − x[1] + x[2]), Y ( z2 ) = Y (∞) = h[0]x[0],
Y ( z3 ) = Y (1) = (h[0] + h[1] + h[2])( x[0] + x[1] + x[2]),
1
2
Y ( z 4 ) = Y ( ) = (h[0] + 2h[1] + 4h[2])( x[0] + 2 x[1] + 4 x[2]).
From Eqs. (6.114) and (6.115), we arrive at
I ( z)
I ( z)
I ( z)
I (z)
I ( z)
Y (z) = 0
Y (z0 ) + 1
Y ( z1 ) + 2
Y (z2 ) + 3
Y ( z3 ) + 4
Y ( z 4 ), where
I 0 (z0 )
I1 ( z1 )
I 2 (z2 )
I 3 ( z3 )
I 4 (z 4 )
I 0 ( z) = (1 − z1z −1 )(1 − z 2 z −1 )(1 − z3 z −1 )(1 − z 4 z −1 ),
I 1( z) = (1 − z0 z −1 )(1 − z 2 z −1 )(1 − z3 z −1 )(1 − z 4 z −1 ),
I 2 ( z) = (1 − z0 z −1 )(1 − z1z −1 )(1 − z3 z −1 )(1 − z 4 z −1 ),
I 3( z) = (1 − z 0 z −1 )(1 − z1z −1 )(1 − z 2 z −1 )(1 − z 4 z −1 ),
I 4( z) = (1 − z 0 z −1 )(1 − z1z −1 )(1 − z 2 z −1 )(1 − z3 z −1 ). Therefore,
I 0 ( z) (1 − z1z −1 )(1 − z2 z −1 )(1 − z3 z −1 )(1 − z4 z −1 ) 1 −1
1
=
= z (1 − z −1 )(1 − z − 2 ),
−
1
−
−
−
1
1
1
2
I 0 ( z0 ) (1 − z1z0 )(1 − z2 z0 )(1 − z3 z0 )(1 − z4 z0 ) 12
I1 ( z) (1 − z 0 z −1 )(1 − z 2 z −1 )(1 − z3 z −1 )(1 − z 4 z −1 )
1
2
=
= − z −1 (1 − z −1 )(1 − z − 2 ),
4
3
I1 ( z1 ) (1 − z 0 z1−1 )(1 − z 2 z1−1 )(1 − z3 z1−1 )(1 − z 4 z1−1 )
I 2 ( z) (1 − z 0 z −1 )(1 − z1 z −1 )(1 − z3 z −1 )(1 − z 4 z −1 )
1
=
= (1 − z − 2 )(1 − z − 2 ),
4
I 2 ( z 2 ) (1 − z 0 z 2−1 )(1 − z1 z 2−1 )(1 − z3 z 2−1 )(1 − z 4 z 2−1 )
I 3 ( z) (1 − z 0 z −1 )(1 − z1 z −1 )(1 − z 2 z −1 )(1 − z 4 z −1 ) 2 −1
1
=
= z (1 + z −1 )(1 − z − 2 ),
1
1
1
1
−
−
−
−
4
3
I 3 ( z3 ) (1 − z 0 z3 )(1 − z1 z3 )(1 − z 2 z3 )(1 − z 4 z3 )
Not for sale
415
(1 − z 0 z −1 )(1 − z1 z −1 )(1 − z 2 z −1 )(1 − z3 z −1 )
I 4 ( z)
1
1
=
= − z −1 (1 + z −1 )(1 − z − 2 ). Hence,
1
1
1
1
−
−
−
−
2
12
I 4 ( z 4 ) (1 − z 0 z 4 )(1 − z1 z 4 )(1 − z 2 z 4 )(1 − z3 z 4 )
Y ( z) =
1 −1
(z
12
− z − 2 − z − 3 + z − 4 )Y ( z 0 ) − ( z −1 − z − 2 − z − 3 + z − 4 )Y ( z1 )
1
2
+ (1 −
1
4
5 −2
z
4
1
4
2
3
+ z − 4 )Y ( z 2 ) + ( z −1 + z − 2 −
1
4
2
3
1
4
1 −3
z
4
− z − 4 )Y ( z3 )
1
4
1
1 −1 1 −1
+ z − z − 3 − z − 4 )Y ( z 4 )
(z
2
2
12
2
2
1
Y ( z1 ) + Y ( z3 ) − Y ( z 4 ) ⎞⎟ z −1
3
3
12
⎠
−
1
= Y ( z 2 ) + ⎛⎜ Y ( z 0 ) −
12
⎝
1
2
5
2
1
+ ⎛⎜ − Y ( z 0 ) + Y ( z1 ) − Y ( z 2 ) + Y ( z3 ) − Y ( z 4 ) ⎞⎟ z − 2
3
4
3
24
⎝ 24
⎠
1
1
1
1
+ ⎛⎜ − Y ( z 0 ) + Y ( z1 ) − Y ( z3 ) + Y ( z 4 ) ⎞⎟ z − 3
12
6
6
12
⎝
⎠
1
1
1
1
1
+ ⎛⎜ Y ( z 0 ) − Y ( z1 ) + Y ( z 2 ) − Y ( z3 ) + Y ( z 4 ) ⎞⎟ z − 4 .
6
4
6
24
⎝ 24
⎠
Substituting the expressions for Y ( z 0 ), Y ( z1 ), Y ( z 2 ), Y ( z 3 ), and Y ( z 4 ), in the above
equation, we then arrive at the expressions for the coefficients {y[ n]} in terms of the
coefficients {h[ n]} and {x[ n]}. Thus, y[0] = Y ( z 2 ) = h[0]x[0],
1
2
2
1
Y ( z 0 ) − Y ( z1 ) + Y ( z3 ) − Y ( z 4 ) = h[0]x[1] + h[1]x[0],
12
3
3
12
1
2
5
2
1
y[2] = − Y ( z 0 ) + Y ( z1 ) − Y ( z 2 ) + Y ( z3 ) − Y ( z 4 ) = h[0]x[2] + h[1]x[1] + h[2]x[0],
24
3
4
3
24
1
1
1
1
y[3] = − Y ( z 0 ) + Y ( z1 ) − Y ( z3 ) + Y ( z 4 ) = h[1]x[2] + h[2]x[1],
12
6
6
12
1
1
1
1
1
y[ 4] = Y ( z 0 ) − Y ( z1 ) + Y ( z 2 ) − Y ( z3 ) + Y ( z 4 ) = h[2]x[2].
24
6
4
6
24
1 2 5 1 1
1
Hence, ignoring the multiplications by , , , , , and , computation of the
12 3 4 4 6
24
y[1] =
coefficients of Y ( z ) require the values of Y ( z 0 ), Y ( z1 ), Y ( z 2 ), Y ( z3 ), and Y ( z 4 ), which can
be evaluated using only 5 multiplications.
(
)(
11.43 Y ( z ) = H ( z ) X ( z ) or y[ 0] + y[1]z − 1 + y[2]z − 2 = h[ 0] + h[1]z − 1 x[ 0] + x[1]z −1
h[ 0] x[0] + (h[ 0] x[1] + h[1] x[ 0]) z −1
)
+ h[ 2] x[[ 2]z −2 .
Hence, y[ 0] = h[ 0] x[ 0],
=
y[1] = h[ 0] x[1] + h[1] x[ 0], y[ 2] = h[1] x[1]. Now,
(h[ 0] + h[1])( x[ 0] + x[1]) − h[ 0] x[ 0] − h[1] x[1] = h[ 0] x[1] + h[1] x[0] = y[1]. As a result,
evaluation of H ( z ) X ( z ) requires the computation of 3 products, h[ 0] x[ 0], h[1] x[1] , and
(h[ 0] + h[1])( x[ 0] + x[1]) . In addition, it requires 4 additions, h[0] + h[1], x[ 0] + x[1], and
(h[ 0] + h[1])( x[ 0] + x[1]) − h[ 0] x[ 0] − h[1] x[1] .
11.43 Let the two length- N sequences be denoted by {h[ n]} and {x[ n]}. Denote the sequence
Not for sale
416
generated by the linear convolution of h[n] and x[n] as y[n]. Let H ( z) =
X ( z) =
N −1
∑ n = 0 x[n]z − n .
and
Rewrite H ( z ) and X ( z ) in the form H ( z) = H 0 ( z) + z − N / 2 H1 ( z), and
X ( z) = X 0 ( z) + z − N / 2 X1 ( z), where H 0 ( z ) =
( N / 2 ) −1
N −1
∑ n = 0 h[n]z − n
( N / 2) −1
∑n=0
h[ n]z − n ,
( N / 2) −1
∑ n = 0 h[n + 2 ]z − n , X 0 (z) = ∑ n = 0 x[n]z − n ,
( N / 2) −1
N
X1 ( z ) = ∑
x[ n + ]z − n . Therefore, we can write
n=0
2
H1 ( z ) =
N
(
)(
)
Y ( z) = H 0 ( z ) + z − N / 2 H1 ( z) X 0 ( z ) + z − N / 2 X1 ( z )
= H 0 ( z ) X 0 ( z) + z − N / 2 (H 0 ( z) X1 ( z) + H1 ( z) X 0 ( z)) + z − N H1 ( z) X1 ( z)
= Y0 ( z) + z − N / 2Y1 ( z ) + z − N Y2 ( z ), where Y0 ( z) = H 0 ( z) X 0 ( z),
Y1 ( z ) = H 0 ( z) X1 ( z ) + H1 ( z) X 0 ( z ), and Y2 ( z) = H1 ( z) X1 ( z). Note that Y0 ( z) and Y1 ( z) are
2
N
each, and hence, require ⎛⎜ ⎞⎟ multiplications each.
⎝2⎠
Now, we can write Y1 ( z ) = (H 0 ( z ) + H1 ( z ))(X 0 ( z ) + X1 ( z)) − Y0 ( z) − Y1 ( z ). Since,
products of two polynomials of degree
N
2
(H0 ( z) + H1( z))(X 0 ( z) + X1( z)) is a product of two polynomials of degree
N
2
each, it can be
2
N
computed using ⎛⎜ ⎞⎟ multiplications. As a result, Y ( z ) = H ( z ) X ( z ) can be computed using
⎝2⎠
2
N
N
is even, and
3⎛⎜ ⎞⎟ multiplications instead of N 2 multiplications. If N is a power-of-2,
2
⎝2⎠
the same procedure can be applied to compute Y0 ( z), Y1 ( z), and Y2 ( z), reducing further the
number of multiplications. This process can be continued until the sequences being
convolved are of length 1 each.
Let R ( N ) denote the total number of multiplications required to compute the linear
convolution of two N –length sequences. Then, in the method outlined above, we have
R ( N ) = 3 ⋅ R ( N / 2) with R (1) = 1. A solution of this equation is given by R ( N ) = 3 log 2 N .
11.45 The dynamic range of a signed B –bit integer η is given by − (2 ( B −1) − 1) ≤ η < (2 ( B −1) − 1)
which for B = 32 is given by − (2 31 − 1) ≤ η < (2 31 − 1).
(a) For E = 6 and M = 25, the value of a 32-bit floating-point number is given by
η = ( −1) s 2 E − 31 ( M ). Hence, the value of the largest number is ≈ 2 32 , and the value of the
smallest number is ≈ −2 32. The dynamic range is therefore ≈ 2 × 2 32.
(b) For E = 7 and M = 24, the value of a 32-bit floating-point number is given by
η = ( −1) s 2 E − 63 ( M ). Hence, the value of the largest number is ≈ 2 64 , and the value of the
Not for sale
417
smallest number is ≈ −2 64. The dynamic range is therefore ≈ 2 × 2 64.
For E = 8 and M = 23, the value of a 32-bit floating-point number is given by
η = ( −1) s 2 E −127 ( M ). Hence, the value of the largest number is ≈ 2128 , and the value of the
(c)
smallest number is ≈ −2128. The dynamic range is therefore ≈ 2 × 2128.
Hence, the dynamic range in a floating-point representation is much larger than that in a fixedpoint representation with the same wordlength.
11.46 A 32-bit floating-point number in the IEEE Format has E = 8 and M = 23. Also, the
exponent E is coded in a biased form as E − 127 with certain conventions for special cases
such as E = 0, 255, and M = 0 (See page 637 of text).
Now, a positive 32-bit floating-point number represented in the “normalized” form have an
exponent in the range 0 < E < 255, and is of the form η = ( −1) s 2 E −127 (1∆ M ). Hence, the
smallest positive number that can be represented will have E = 1, and M = 0 0 K 0 0,
1442443
22 bits
and has therefore a value given by 2 −126 ≅ 1.18 × 10 −38. For the largest positive number, E
= 254, and M = 1 1 K 1 1. Thus, here η = (−1) 0 2127 (1∆ 1 1 K 1 1) ≈ 2127 × 2
1442443
1442443
22 bits
22 bits
3.4 × 10 38.
≅
Note: For representing numbers less than 2 −126 , IEEE format uses the “de-normalized”
form where E = 0, and η = ( −1) s 2 −126 (0 ∆ M ). In this case, the smallest positive number
that can be represented is given by η = (−1) 0 2126 (0 ∆ 0 0 K 0 1) ≈ 2 −149
1442443
22 bits
≅ 1.4013 × 10 −45.
11.47 For a two’s-complement binary fraction s ∆ a −1a − 2 K a − b , the decimal equivalent for
s = 0 is simply
∑ i =1 a − i 2 − i. For s = 1, the decimal equivalent is given by
b
b
b
b
⎛ b
⎞
−
i
−
b
−
−
−
−
i
b
b
i
⎜
⎟
(1 − a − i )2 + 2
−
=− 2 +
a − i 2 − 2 = −(1 − 2 ) +
a− i 2 − i − 2 − b
⎜
⎟
i =1
i =1
i =1
⎝ i =1
⎠
∑
∑
= −1 +
−s+
∑
∑
b
∑ a− i 2 − i.
i =1
b
Hence, the decimal equivalent of s ∆ a −1a − 2 K a − b is given by
∑ a − i 2 − i.
i =1
11.48 For a ones’-complement binary fraction s ∆ a −1a − 2 K a − b , the decimal equivalent for
Not for sale
418
s = 0 is simply
∑ i =1 a − i 2 − i. For s = 1, the decimal equivalent is given by
b
b
b
b
⎛ b
⎞
−
i
−
−
−
i
b
i
⎜
⎟
(1 − a − i )2
−
=− 2 +
a − i 2 = −(1 − 2 ) +
a− i 2 − i
⎜
⎟
i =1
i =1
i =1
⎝ i =1
⎠
∑
= −1 +
∑
∑
∑
b
∑ a− i 2 − i.
i =1
− s(1 − 2 − b ) +
Hence, the decimal equivalent of s ∆ a −1a − 2 K a − b is given by
b
∑ a − i 2 − i.
i =1
11.49 η1 = 0.7812510 = 0 ∆11001, η2 = 0.6875010 = 0 ∆10110, η3 = 0.5312510 = 1∆ 01111.
η1 + η2 = 0 ∆11001 + 0 ∆10110 = 1∆ 01111.
Dropping thee overflow bit and adding (η1 + η2 ) to η3 :
(η1 + η2 ) + n3 = 0 ∆ 01111 + 1∆ 01111 = 0 ∆11110 = 0.937510 ,
where we have dropped the carry bit in the MSB location. Note that the final sum is correct
inspite of the overflow.
⎛ e jωˆ + e − jωˆ ⎞
⎟,
β ⎜⎜
⎟
2
⎝
⎠
−
1
−
1
⎛ zˆ + zˆ ⎞
z+z
⎟. Now, H ( z ) let
which by analytic continuation can be expressed as
= α + β ⎜⎜
⎟
2
⎝ 2 ⎠
be a Type 1 linear-phase FIR transfer function of degree 2M. As indicated in Eq. (8.128),
11.49 The transformation cos ω = α + β cos ωˆ is equivalent to
H ( z ) can be expressed as H ( z) = z − M
given by H (e jω ) = e − jMω
∑
e jω + e − jω
=α+
2
⎛ z + z −1 ⎞
M
⎟
a[ n]⎜⎜
n=0
2 ⎟
⎝
(
⎠
n
with a frequency response
∑ n = 0 a[n](cos ω) n , with H (ω) = ∑ n = 0 a[n](cos ω) n
M
M
denoting
the amplitude function or the zero-phase frequency response. The amplitude function or the
zero-phase frequency response of the transformed filter obtained by applying the mapping
(
M
a[ n](α + β cos ωˆ ) n . Or, equivalently,
cos ω = α + β cos ωˆ is therefore given by H (ωˆ ) =
∑n=0
the transfer function of the transformed filter is given by
H ( zˆ ) = z − M
∑
⎛
M
zˆ + zˆ −1 ⎞⎟
a[ n]⎜⎜ α + β
n=0
2 ⎟⎠
⎝
n
A convenient way to realize H ( zˆ ) is to consider the
realization of the parent transfer function H ( z ) in the form of a Taylor structure as outlined in
Problem 8.17 which is obtained by expressing H ( z ) in the form
H ( z) =
∑
n
−2 ⎞
⎛
+
1
M
z
⎟ . Similarly, the transformed filter can be realized by
a[ n]z − M + n ⎜⎜
n=0
2 ⎟
⎝
⎠
Not for sale
419
1 + z −2
1 + zˆ −2
in the Taylor structure by the block αzˆ −1 + β
.
2
2
Now, for a lowpass-to-lowpass transformation we can impose the condition
(
(
H (ωˆ )
= H (ω)
. This condition is met if α + β = 1 and 0 ≤ α < 1. In this case, the
replacing each block
ωˆ = 0
ω=0
transformation reduces to cos ω = α + (1 − α ) cos ωˆ . From the plot of the mapping given below, it
follows that as α is varied between 0 and 1, ωˆ c < ωc .
1
cos ω
0.5
0
-0.5
-1
-1
-0.5
0
^
cos ω
0.5
1
On the other hand if ωˆ c > ωc . is desired along with a lowpass-to-lowpass transformation, we
(
(
= H (ω)
. This condition is met if β = 1 + α and
can impose the condition H (ωˆ )
ωˆ = π
ω=π
− 1 < α ≤ 1. The corresponding transformation is now given by cos ω = α + (1 + α ) cos ωˆ . From
the plot of the mapping given below, it follows that as α is varied between 0 and 1, ωˆ c > ωc .
1
cos ω
0.5
0
-0.5
-1
-1
11.51 (a) X ( z ) =
N −1
∑
x[n]z
n=0
−n
-0.5
0
^
cos ω
0.5
1
n
(
N −1
⎛ − α + z( −1 ⎞
(
( −1
⎟ = P( z() ,
. X ( z ) = X ( z ) z −1 = − α + z = ∑ x[n]⎜
⎜ 1 − αz( −1 ⎟
D( z )
(
n=0
⎠
⎝
1− αz −1
N −1
( N −1
(
(
(
where P( z ) = ∑ p[n]z − n = ∑ x[n](1 − α z −1 ) N −1− n (−α + z −1 ) n , and
n=0
n=0
(
D( z ) =
N −1
(
(
∑ d [n]z − n = (1 − αz −1 ) N −1.
n=0
Not for sale
420
(
(
(
(
P( z )
P[k ]
(
(
= ( , where P[k ] = P( z ) z( = e j 2 πk / N is
(b) X [k ] = X ( z ) z( = e j 2 πk / N =
(
D( z ) z( = e j 2 πk / N
D[k ]
(
(
the N –point DFT of the sequence p[n] and D[k ] = D( z ) z( = e j 2 πk / N is the N –point DFT
of the sequence d [n].
(c) Let P = [ p[0] p[1] L p[ N − 1]]t and X = [x[0] x[1] L x[ N − 1]]t . Without any
loss of generality, assume N = 4 in which case
(
)
3
(
(
P( z ) = ∑ p[n]z − n = x[0] − αx[1] + α 2 x[2] − α 3 x[3]
(
(
(
n=0
)
(
+ − 3αx[0] + (1 + 2α 2 ) x[1] − α(2 + α 2 ) x[2] + 3α 2 x[3] z −1
(
+ 3α 2 x[0] − α(2 + α 2 ) x[1] − (1 + α 2 ) x[2] − 3αx[3] z −2
(
(
+ − α 3 x[0] + α 2 x[1] − αx[2] + αx[3] z −3 . Equating like powers of z −1 we can write
⎡
−α
α2
− α 3 ⎤ ⎡ x[0]⎤
⎡ p[0]⎤ ⎢ 1
⎥
2
2
⎢ p[1] ⎥ ⎢ − 3α
− α(2 + α ) 3α 2 ⎥ ⎢ x[1] ⎥
1 + 2α
P = Q ⋅ X or ⎢
. It can be shown
=
p[2]⎥ ⎢ 2 − α(2 + α 2 )
− 3α ⎥ ⎢⎢ x[2]⎥⎥
1 + 2α 2
⎢ p[3]⎥ ⎢ 3α
⎥ x[3]⎦
3
⎦
⎣
α2
−α
1 ⎦⎣
⎣− α
that the elements q r , s , 0 ≤ r , s ≤ 3, of the 4 × 4 matrix Q can be determined as follows:
(i)
)
)
The first row is given by q0, s = (−α) s ,
3!
(−α ) r , and
r!(3 − r )!
(iii) The remaining elements can be obtained using the recurrence relation
q r , s = q r −1, s −1 − α q r , s −1 + α q r −1, s .
(ii)
The first column is given by q r ,0 = 3C r (−α ) r =
In the general case, we only change the computation of the elements of the first column
( N − 1)!
( −α ) r .
using the relation q r ,0 = N −1C r (−α) r =
r!( N − 1 − r )!
A 0 ( z) =
0.3038 + z −1
[
]
1
A ( z) − A1 ( z) ,
2 0
0.639 + 0.4012 z −1 + z −2
11.52 The highpass transfer function can be expressed as H ( z ) =
where
and A1 ( z) =
. The tunable highpass
1 + 0.3038z −1
1 + 0.4012 z −1 + 0.639z − 2
transfer function is obtained by applying the lowpass-to-lowpass transformation of Eq.
sin[(0.6π − ωˆ p ) / 2]
(11.115) where the tuning parameter is given by α =
. The tunable
sin[(0.6π + ωˆ p ) / 2]
highpass transfer function is then given by H ( z, α ) =
Not for sale
1
2
[Aˆ 0 (z) − Aˆ1 (z)], where from Eqn.
421
[ 0.3038 − 0.9077α ] + z −1
and from Eqn. (11.123)
(11.119) Aˆ 0 ( z ) =
1 + [ 0.3038 − 0.9077α ]z −1
[ 0.639 − 0.1448α ] + [0.4012 + 3.439α ]z −1 + z −2
.
Aˆ 1( z ) =
1 + +[ 0.4012 + 3.439α ]z −1 + [ 0.639 − 0.1448α ]z − 2
11.53
[
]
1
A ( z) + A1 ( z) ,
2 0
0.3554 − 0.4191 z −1 + z −2
The lowpass transfer function can be expressed as H ( z) =
− 0.1584 + z −1
where
. The tunable bandpass
and A1 ( z ) =
1 − 0.4191 z −1 + 0.3554 z − 2
1 − 0.1584 z −1
transfer function is obtained by applying the lowpass-to-bandpass transformation of Eq.
(11.124) where the tuning parameter is given by β = cos ωo with ωo denoting the center
frequency of the bandpass filter. The tunable bandpass transfer function is then given by
⎛ β + z −1 ⎞
⎟
− 0.1584 − z −1 ⎜⎜
−1 ⎟
1
+
β
z
1 ˆ
⎝
⎠ and
H ( z, α ) = A 0 ( z) + Aˆ 1 ( z) , where Aˆ 0 ( z ) =
2
⎛ β + z −1 ⎞
⎟⎟
1 + 0.1584 z −1 ⎜⎜
⎝ 1+ βz −1 ⎠
A 0 (z) =
[
Aˆ 1 ( z ) =
]
⎛ β + z −1 ⎞
⎛ β + z −1 ⎞
⎟⎟ + z − 2 ⎜⎜
⎟
0.3554 + 0.4191 z −1 ⎜⎜
−1
−1 ⎟
+
z
+
z
1
1
β
β
⎝
⎠
⎝
⎠
2
⎛
⎞
⎛
⎞
⎟⎟ + 0.3554 z − 2 ⎜⎜
⎟⎟
1 + 0.4191 z −1 ⎜⎜
−
1
−
1
z
z
+
β
+
β
1
1
⎝
⎠
⎝
⎠
β + z −1
β + z −1
M11.1 (a) Numerator coefficients =
[0.0528
0.0797
0.1295
Denominator coefficients =
[1.0000
-1.8107
2.4947
2
.
0.1295
0.0797
0.0528]
-1.8801
0.9537
-0.2336]
Impulse response samples
0.6
Amplitude
0.4
0.2
0
-0.2
0
5
10
15
20
Time index n
(b) Numerator coefficients =
[0.0084
-0.0335
0.0502
Denominator coefficients =
-0.0335
Not for sale
25
30
0.0084]
422
[1.0000
2.3741
2.7057
1.5917
0.4103]
Impulse response samples
0.4
Amplitude
0.2
0
-0.2
-0.4
0
5
10
15
20
Time index n
25
30
(c) Numerator coefficients = [0.0003 0 -0.0019 0 0.0057 0
-0.0095 0 0.0095 0 -0.0057 0 0.0019 0 -0.0003]
Denominator coefficients = [1.0000 1.7451
4.9282
6.1195
9.8134
9.2245
10.4323
7.5154
6.4091
3.4595
2.2601
0.8470 0.4167
0.0856
0.0299]
Impulse response samples
0.4
Amplitude
0.2
0
-0.2
-0.4
0
5
10
15
20
Time index n
25
30
M11.2 The modified MATLAB program is given below:
n = 0:60;
w = input('Normalized angular frequency vector = ');
num = input('Numerator coefficients = ');
den = input('Denominator coefficients = ');
x1 = cos(w(1)*pi*n); x2 = cos(w(2)*pi*n);
x = x1+x2;
% Generate the output sequence by filtering the input
y = filter(num,den,x);
% Plot the input and the output sequences
figure(1)
stem(n,x);
xlabel('Time index n'); ylabel('Amplitude');
title('Input sequence');
figure(2)
stem(n,y);
xlabel('Time index n'); ylabel('Amplitude');
Not for sale
423
title('Output sequence');
The plots generated by the above program for the filter of Example 9.14 for an input
composed of a sum of two sinusoidal sequences of angular frequencies, 0.3π and 0.6π, are
given below:
Output sequence
1
1
0.5
Amplitude
Amplitude
Input sequence
2
0
-1
-2
0
-0.5
0
10
20
30
40
Time index n
50
-1
60
0
10
20
30
40
Time index n
50
60
The blocking of the high-frequency signal by the lowpass filter can be demonstrated by
replacing the statement stem(n,x); with stem(n,x2); and the statement
y=filter(num,den,x); with y=filter(num,den,x2);. The plots of the highfrequency input signal and the corresponding output are shown below:
Output sequence
0.3
0.5
0.2
Amplitude
Amplitude
Input sequence
1
0
-0.5
-1
0.1
0
-0.1
0
10
20
30
40
Time index n
50
-0.2
60
0
10
20
30
40
Time index n
50
60
M11.3 The plots generated by the program of Exercise M11.2 for the filter of Example 9.15
for an input composed of a sum of two sinusoidal sequences of angular frequencies, 0.3π and
0.6π, are given below:
Output sequence
0.4
1
0.2
Amplitude
Amplitude
Input sequence
2
0
-1
-2
0
-0.2
-0.4
0
10
20
30
40
Time index n
50
60
-0.6
Not for sale
0
10
20
30
40
Time index n
50
60
424
The blocking of the low-frequency signal by the highpass filter can be demonstrated by
replacing the statement stem(n,x); with stem(n,x1); and the statement
y=filter(num,den,x); with y=filter(num,den,x1);. The plots of the lowfrequency input signal and the corresponding output are shown below:
Output sequence
0.2
0.5
0.1
Amplitude
Amplitude
Input sequence
1
0
-0.5
-1
0
-0.1
0
10
20
30
40
Time index n
50
60
-0.2
0
10
20
30
40
Time index n
50
60
M11.4 % The factors for the transfer function of
% the lowpass filter of Example 9.14 are
% num1 = [0.0528 0.0528 0];
% den1 = [1.0000 -0.4909 0];
% num2 = [1.0000 0.6040 1.0000];
% den2 = [1.0000 -0.7624 0.5390];
% num3 = [1.0000 -0.0949 1.0000];
% den3 = [1.0000 -0.5574 0.8828];
N = input(‘Total number of sections = ‘);
for k = 1:N;
num(k,:) = input('Numerator factor = ');
den(k,:) = input('Denominator factor = ');
end
n = 0:60;
w = input('Normalized angular frequency vector = ');
x1 = cos*w(1)*pi*n); x2 = cos*w(2)*pi*n);
x = x1 + x2;
% Plot the input sequence
figure(1)
stem(n,x);
xlabel('Time index n'); ylabel('Amplitude');
title('Input sequence');
si = [0 0];
for k = 1:N;
y(k,:) = filter(num(k,:),den(k,:),x,si);
x = y(k,:);
end
% Plot the output sequence
figure(2)
stem(n,y(N,:));
xlabel('Time index n'); ylabel('Amplitude');
title('Output sequence');
Not for sale
425
The plots generated by the above program for the filter of Example 9.14 for an input
composed of a sum of two sinusoidal sequences of angular frequencies, 0.3π and 0.6π, are
given below:
Output sequence
Input sequence
1
2
0.5
Amplitude
Amplitude
1
0
-0.5
-1
-2
M11.5 %
%
%
%
%
%
0
-1
0
10
20
30
40
Time index n
50
60
0
10
20
30
40
Time index n
50
60
The factors for the transfer function of
the highpass filter of Example 9.15 are
num1 = [0.0084 -0.0167 0.0084];
den1 = [1.0000
1.3101 0.5151];
num2 = [1.0000 -2.0000 1.0000];
den2 = [1.0000
1.0640 0.7966];
The plots generated by the program of Exercise M11.4 for the filter of Example 9.15 for an
input composed of a sum of two sinusoidal sequences of angular frequencies, 0.3π and 0.6π,
are given below:
Input sequence
Output sequence
2
0.4
0.2
Amplitude
Amplitude
1
0
-1
-2
0
-0.2
-0.4
0
10
20
30
40
Time index n
50
60
-0.6
0
10
20
30
40
Time index n
50
60
M11.6 To apply the function direct2 to filter a sum of two sinusoidal sequences, we replace
the statement y = filter(num,den,x,si); in the MATLAB program given in the
solution of Exercise M11.2 with the statement y = direct2(num,den,x,si);. The
plots generated by running the modified program for the data given in this problem are given
below:
Not for sale
426
Output sequence
1
1
0.5
Amplitude
Amplitude
Input sequence
2
0
-0.5
-1
-2
0
0
10
20
30
40
Time index n
50
60
-1
0
10
20
30
40
Time index n
50
60
M11.7 The MATLAB program that can be used to compute all DFT samples using the function
goertzel and the function fft is as follows:
clear
N = input('Desired DFT length = ');
x = input('Input sequence = ');
for j = 1:N
Y(j)=goertzel(x,j);
end
disp('DFT samples computed using goertzel are ') ;
disp(Y)
disp('DFT samples computed using fft are ') ;
X = fft(x); disp(X);
Results obtained for two input sequences of lengths 8 and 12, respectively, are given below:
Desired DFT length = 8
Input sequence = [1 2 3 4 4 3 2 1]
DFT samples computed using goertzel are
Columns 1 through 4
20.0000
-5.8284-2.4142i -0.0000-0.0000i -0.1716-0.4142i
Columns 5 through 8
0-0.0000i -0.1716+0.4142i
0.0000-0.0000i -5.8284+2.4142i
DFT samples computed using fft are
Columns 1 through 4
20.0000
-5.8284-2.4142i 0
Columns 5 through 8
0
-0.1716+0.4142i 0
Desired DFT length = 12
Input sequence = [1 2 4 8 10 12 7
-0.1716-0.4142i
-5.828 +2.4142i
3 -4 5 0
DFT samples computed using goertzel are
Columns 1 through 4
54.0000 -13.0622-21.0885i
1.5000+19.9186i
Columns 5 through 8
Not for sale
6]
-4.0000-2.0000i
427
4.5000+2.5981i
-0.9378-10.0885i
-0.9378+10.0885i
Columns 9 through 12
4.5000-2.5981i -4.0000+2.0000i
13.0622 +21.0885i
-18.0000+0.0000i
1.5000-19.9186i
DFT samples computed using fft are
54.0000 -13.0622-21.0885i
1.5000+19.9186i
Columns 5 through 8
4.5000+2.5981i
-0.9378-10.0885i
-0.9378+10.0885i
Columns 9 through 12
4.5000-2.5981i -4.0000+2.0000i
13.0622 +21.0885i
-
-4.0000-2.0000i
-18.0000+0.0000i
1.5000-19.9186i
-
M11.8 The MATLAB program that can be used to verify the plots of Figure 11.43 is given below:
%Program_11_8.m
[z,p,k] = ellip(5,0.5,40,0.4);
a = conv([1 -p(1)],[1 -p(2)]);b =[1 -p(5)];
c = conv([1 -p(3)],[1 -p(4)]);
w = 0:pi/255:pi;
alpha = 0;
an1 = a(2) + (a(2)*a(2) - 2*(1 + a(3)))*alpha;
an2 = a(3) + (a(3) -1)*a(2)*alpha;
g = b(2) - (1 - b(2)*b(2))*alpha;
cn1 = c(2) + (c(2)*c(2) - 2*(1 + c(3)))*alpha;
cn2 = c(3) + (c(3) -1)*c(2)*alpha;
a = [1 an1 an2];b = [1 g]; c = [1 cn1 cn2];
h1 = freqz(fliplr(a),a,w); h2 = freqz(fliplr(b),b,w);
h3 = freqz(fliplr(c),c,w);
ha = 0.5*(h1.*h2 + h3);ma = 20*log10(abs(ha));
alpha = 0.1;
an1 = a(2) + (a(2)*a(2) - 2*(1 + a(3)))*alpha;
an2 = a(3) + (a(3) -1)*a(2)*alpha;
g = b(2) - (1 - b(2)*b(2))*alpha;
cn1 = c(2) + (c(2)*c(2) - 2*(1 + c(3)))*alpha;
cn2 = c(3) + (c(3) -1)*c(2)*alpha;
a = [1 an1 an2];b = [1 g]; c = [1 cn1 cn2];
h1 = freqz(fliplr(a),a,w); h2 = freqz(fliplr(b),b,w);
h3 = freqz(fliplr(c),c,w);
hb = 0.5*(h1.*h2 + h3);mb = 20*log10(abs(hb));
alpha = -0.25;
an1 = a(2) + (a(2)*a(2) - 2*(1 + a(3)))*alpha;
an2 = a(3) + (a(3) -1)*a(2)*alpha;
g = b(2) - (1 - b(2)*b(2))*alpha;
cn1 = c(2) + (c(2)*c(2) - 2*(1 + c(3)))*alpha;
cn2 = c(3) + (c(3) -1)*c(2)*alpha;
Not for sale
428
a = [1 an1 an2];b = [1 g]; c = [1 cn1 cn2];
h1 = freqz(fliplr(a),a,w); h2 = freqz(fliplr(b),b,w);
h3 = freqz(fliplr(c),c,w);
hc = 0.5*(h1.*h2 + h3);mc = 20*log10(abs(hc));
plot(w/pi,ma,'r-',w/pi,mb,'b--',w/pi,mc,'g-.');axis([0 1 -80 5]);
xlabel('Normalized frequency');ylabel('Gain, dB');
legend('b--','\alpha = 0.1 ','r-','\alpha = 0 ','g-.','\alpha = -0.25
');
M11.9 The MATLAB program that can be used to verify the plots of Figure 11.44 is given below:
%Program_11_9.m
w = 0:pi/255:pi;
wc2 = 0.31*pi;
f = [0 0.36 0.46 1];m = [1 1 0 0];
b1 = remez(50, f, m);
h1 = freqz(b1,1,w);
m1 = 20*log10(abs(h1));
n = -25:-1;
c = b1(1:25)./sin(0.41*pi*n);
d = c.*sin(wc2*n);q = (b1(26)*wc2)/(0.4*pi);
b2 = [d q fliplr(d)];
h2 = freqz(b2,1,w);
m2 = 20*log10(abs(h2));
wc3 = 0.51*pi;
d = c.*sin(wc3*n);q = (b1(26)*wc3)/(0.4*pi);
b3 = [d q fliplr(d)];
h3 = freqz(b3,1,w);
m3 = 20*log10(abs(h3));
plot(w/pi,m1,'r-',w/pi,m2,'b--',w/pi,m3,'g-.');
axis([0 1 -80 5]);
xlabel('Normalized frequency');ylabel('Gain, dB');
legend('b--','\omega_c = 0.3\pi','r-','\omega_c = 0.41\pi','g.','\omega_c = 0.51\pi')
M11.10 The MATLAB program to evaluate Eqs. (11.155) is given below:
%Program_11_10.m
x = 0:0.001:0.5;
y = 3.140625*x + 0.0202636*x.^2 - 5.325196*x.^3 +
0.5446778*x.^4 + 1.800293*x.^5;
x1 = pi*x;
z = sin(x1);
plot(x,y);
xlabel('Normalized angle, radians');ylabel('Amplitude');
title('Approximate sine values');grid;axis([0 0.5 0 1]);
pause
plot(x,y-z);
xlabel('Normalized angle, radians');ylabel('Amplitude');
title('Error of approximation');grid;
The plots generated by the above program are as indicated below:
Not for sale
429
-5
Approximate sine values
3
Amplitude
Amplitude
0.8
0.6
0.4
0.2
0
Error of approximation
x 10
4
1
2
1
0
-1
0
0.1
0.2
0.3
0.4
Normalized angle, radians
-2
0.5
0
0.1
0.2
0.3
0.4
Normalized angle, radians
0.5
M11.11 The MATLAB program to evaluate Eqs. (11.156) and (11.135) is given below:
%Program_11_11.m
k = 1;
for x = 0:.01:1
op1 = 0.318253*x+0.00331*x^2-0.130908*x^3+0.068524*x^40.009159*x^5;
op2 = 0.999866*x-0.3302995*x^3+0.180141*x^50.085133*x^7+0.0208351*x^9;
arctan1(k) = op1*180/pi;
arctan2(k) = 180*op2/pi;
actual(k) = atan(x)*180/pi;
k = k+1;
end
subplot(211)
x = 0:.01:1;
plot(x,arctan2);
ylabel('Angle, degrees');xlabel('Tangent Values');
subplot(212)
plot(x,actual-arctan2,'--');
ylabel('Tangent Values');xlabel('error, radians');
The plots generated by the above program are as indicated below:
1
40
0.5
Tangent Values
Angle, degrees
-3
50
30
20
10
0
0
0.2
0.4
0.6
Tangent Values
0.8
1
Not for sale
x 10
0
-0.5
-1
0
0.2
0.4
0.6
error, radians
0.8
1
430
Chapter 12
12.1 Two’s Complement Truncation - Assume x > 0. The relative error et is given by
∑
∑
b
∑
β
β
a 2−i −
a 2−i −
a 2−i
Q( x ) − x Q( M ) − M
i =1 − i
i =1 − i
i = b +1 − i
=
=
=
et =
. Now will
x
M
M
M
be a minimum if all a − i ‘s are 1 and will be a maximum if all a − i ‘s are 0 for b + 1 ≤ i ≤ β.
δ
0
Thus, −
≤ et ≤ . Since, 0.5 ≤ M < 1 , hence − 2δ ≤ et ≤ 0.
M
M
Next, consider x < 0. Here, the relative error et is given by
∑
∑
b
β
−i
−i
Q( x ) − x Q( M ) − M − 1 + i = 1 a − i 2 + 1 − i = 1 a − i 2
et =
=
=
. As before,
x
M
M
δ
0
−
≤ et ≤ . In this case, − 1 ≤ M ≤ −0.5, and hence, 0 ≤ et ≤ 2δ.
M
M
Ones’ Complement Truncation - Assume x > 0. The relative error et is given by
Q( x ) − x Q( M ) − M
et =
=
=
x
M
∑ i =1 a − i 2 − i − ∑ i = 1 a − i 2 − i = − ∑ i = b + 1 a − i 2 − i .
β
b
β
M
∑
M
∑
b
∑
β
β
a 2−i −
a 2−i −
a 2−i
Q( x ) − x Q( M ) − M
i =1 − i
i =1 − i
i = b +1 − i
et =
. Now will
=
=
=
x
M
M
M
be a minimum if all a − i ‘s are 1 and will be a maximum if all a − i ‘s are 0 for b + 1 ≤ i ≤ β.
δ
0
Thus, −
≤ et ≤ . Since, 0.5 ≤ M ≤ 1 , hence − 2δ ≤ et ≤ 0.
M
M
Next, consider x < 0. Here, the relative error et is given by
−b
Q( x ) − x Q( M ) − M − (1 − 2 ) +
=
=
et =
x
M
=
(2 − b − 2 − β ) +
∑ i = b +1 a − i 2 − i .
∑ i =1 a − i 2 − i + (1 − 2 − β ) − ∑ i =1 a− i 2 − i
β
b
M
β
M
Now will be a minimum if all a − i ‘s are 1 and will be a
maximum if all a − i ‘s are 0 for b + 1 ≤ i ≤ β. In this case,
− 0.5 ≤ M < −1 , hence, − 2δ ≤ et ≤ 0.
0
δ
≤ et ≤ . Since,
M
M
Sign-Magnitude Truncation - Assume x > 0. The relative error et is given by
∑
b
∑ i =1 a − i 2 − i = ∑ i = b + 1 a − i 2 − i .
−i
Q( M ) − M − i = 1 a − i 2 +
et =
=
M
M
− 0.5 ≤ M < −1 , hence − 2δ ≤ et < 0.
β
Not for sale
β
M
Since,
431
Rounding - ε = Q( M ) − M . Hence, −
− δ ≤ et ≤ δ.
δ
δ
≤ε≤
. Since, − 1 < M ≤ −0.5, hence,
2M
2M
12.2 The denominator is given by D( z ) = z − α. Here, the pole is at z = re jθ = α, where r = α
∂r
and θ = 0. The components of the pole sensitivities are therefore given by
= 1 and
∂α
∂θ
= 0.
∂α
12.3 The denominator is given by D( z ) = z 2 − β (1 + α ) z + α = ( z − r e jθ )( z − r e − jθ )
= z 2 − 2r cos θ z + r 2 . Comparing we get 2r cos θ = β (1 + α ) and r 2 = α. Taking the partials
of both sides of the last two equations we get
1
0 ⎤ ∆α
0
0 ⎤ ⎡∆α ⎤ = ⎡ 2r cos
⎡ ⎤
⎤ ⎡ ∆r ⎤ = ⎡ 1
⎡ 2r
θ
⎢
1 + r 2 ⎥ ⎢⎣∆β ⎥⎦ , or
⎢⎣2 cos θ − 2r sin θ ⎥⎦ ⎢⎣∆θ ⎥⎦ ⎢⎣ β 1 + α ⎥⎦ ⎢⎣∆β ⎥⎦ ⎢
⎥⎦
⎣ 1+ r 2
1
⎡
⎤
0
−1 ⎡ 1
0
⎤
⎢
⎥ ⎡∆α ⎤
2
r
r
r
α
∆
∆
2
0
⎤
⎡ ⎤
⎡ ⎤=⎡
2r cos θ
.
2 ⎥
1 + r 2 ⎥ ⎢⎣∆β ⎥⎦ = ⎢ (1− r 2 ) cos θ
+
r
1
⎢⎣∆β ⎥⎦
⎢⎣∆θ ⎥⎦ ⎢⎣2 cos θ − 2r sin θ ⎥⎦ ⎢⎢
2
⎥
−
⎢
⎥
⎣ 1+ r
⎦
2r sin θ ⎦
⎣ 2r 2 (1+ r 2 ) sin θ
Hence, the components of the pole sensitivities are given by
1 ∂r
(1 − r 2 ) cos θ
∂r
∂θ
1+ r2
∂θ
, and
= ,
= 0,
=
.
=−
∂ α 2r ∂ β
∂ α 2r 2 (1 + r 2 ) sin θ
2r sin θ
∂β
12.4 The digital filter structure of Figure P12.1 with internal variables labeled is shown below.
Analysis yields
X(z)
W(z)
U(z)
_
z 1
c
V(z)
d
_
z 1
c
Y(z)
d
_1
W ( z ) = X ( z ) − Y ( z ), U ( z ) = W ( z ) + c d z −1U ( z ) ⇒ U ( z ) =
W ( z)
1− cd z
−1
=
X ( z) − Y ( z)
1 − c d z −1
, and
zY ( z )
. Also, V ( z ) = c z −1U ( z ) + d Y ( z ). Thus,
c
−
1
−
1
Y ( z ){1 − c d z − c d z (1 − − c d z −1 ) + c 2 z −2 } = c 2 z −2 X ( z ). Hence,
c z −1V ( z ) = Y ( z ) ⇒ V ( z ) =
H (z) =
Y ( z)
c2
.
=
X ( z) z 2 − 2c d z + c 2 (1 + d 2 )
Not for sale
432
Let c 2 (1 + d 2 ) = r 2 and c d = r cos θ . Solving we get cos θ =
d
1+ d2
. Thus,
d = cot θ and c = r sin θ. Hence, ∆d = − cosec 2 θ (∆θ ) and ∆c = sin θ (∆θ ) + r cos θ (∆θ ). Or,
r cos θ ⎤ ⎡ ∆r ⎤
⎡ ∆c ⎤ = ⎡sin θ
⎡ ∆r ⎤ = − sin θ ⎡ − cosec 2 θ − r cos θ ⎤ ⎡ ∆c ⎤
⇒
2
⎢⎣
⎢⎣∆d ⎥⎦ ⎢⎣ 0
⎢⎣∆θ ⎥⎦
− cosec θ ⎥⎦ ⎢⎣∆θ ⎥⎦
0
sin θ ⎥⎦ ⎢⎣∆d ⎥⎦
⎡ 1
− r cos θ ⋅ cos θ ⎤ ⎡ ∆c ⎤
⎥
.
= ⎢ sin θ
⎢⎣∆d ⎥⎦
2
⎥
⎢⎣ 0
− sin θ ⎦
The digital filter structure of Figure 12.54 with internal variables labeled is shown below.
U(z)
X(z)
V(z)
c
c W(z) _
z 1
d
_
z 1
Y(z)
_d
Analysis yields U ( z) = X ( z ) − dY ( z ), V ( z) = U ( z) + c z −1V ( z ) ⇒ V ( z) =
W ( z ) = c d z −1V ( z ) + c z −1W ( z ), or W ( z) =
Y ( z ) = c z −1W ( z ) or,
Y ( z)
c z −1
=
c d z −1
1 − c z −1
c d z −1 (X ( z) − dY ( z))
(1 − c z −1 ) 2
V (z) =
c d z −1
(1 − c z −1 ) 2
U ( z)
1 − c z −1
, and
U ( z ). As a result,
. Thus,
Y ( z ){(1 − c z −1 ) 2 + c 2 d z −2 } = c 2 d z −2 X ( z ). Hence, H ( z) =
Y (z)
c2d
=
.
X ( z) z 2 − 2c z + c 2 (1 + d 2 )
We let c = r cosθ , and c 2 (1 + d 2 ) = r 2 . Therefore, 1 + d 2 = sec 2 θ ⇒ d = tan θ. Taking
partials we then get ∆c = cos θ (∆r ) − r sin θ (∆θ ) and ∆d = sec 2 θ (∆θ ). Thus,
⎡ ∆c ⎤ = ⎡cos θ
⎢⎣∆d ⎥⎦ ⎢⎣ 0
⎡ 1
− r sin θ ⎤ ⎡ ∆r ⎤
∆
r
⎡
⎤
= ⎢ cos θ
⇒
⎢⎣∆θ ⎥⎦ ⎢
sec 2 θ ⎥⎦ ⎢⎣∆θ ⎥⎦
⎣ 0
r sin⋅ cos θ ⎤ ⎡ ∆c ⎤
⎥
.
⎢ ∆d ⎥
cos 2 θ ⎥⎦ ⎣ ⎦
12.5 The digital filter structure of Figure P12.2 with internal variables labeled is shown on the next
page. Analysis yields X ( z ) + 2 z −1S ( z ) − bz −1S ( z ) − Y ( z ) − cY ( z ) = S ( z ) and Y ( z ) = z −2 S ( z ).
Thus, H ( z) =
1
Y (z)
z −2
.
=
=
X ( z) 1 + (b − 2)z −1 + (1 + c)z − 2 z 2 + (b − 2)z + (1 + c)
Let 1 + c = r 2 and 2 − b = 2r cos θ. Taking partials, we get
∆c = 2r (∆r ) and − ∆b = 2 cos θ (∆r ) − 2r sin θ (∆θ ). Therefore, we have
Not for sale
433
S(z) _1
z
X(z)
_
z 1
Y(z)
2
_
b
_1
_c
⎡ 1
0 ⎤
⎥ ⎡ ∆c ⎤
0
⎤ ⎡ ∆r ⎤ or, ⎡ ∆r ⎤ = ⎢ 2r
⎡ ∆c ⎤ = ⎡ 2r
1 ⎥ ⎢⎣ ∆b ⎥⎦.
⎢⎣∆θ ⎥⎦ ⎢ 1
⎢⎣∆b ⎥⎦ ⎢⎣2 cos θ − 2r sin θ ⎥⎦ ⎢⎣∆θ ⎥⎦
−
⎢⎣ 2r 2 tan θ
2r sin θ ⎥⎦
From Eq. (12.19) the pole sensitivities for Figure 12.11 are given by
θ
sin θ ⎤ ⎡∆α ⎤
⎡ ∆r ⎤ = ⎡ cos
1
1
.
⎢
cos θ ⎥⎥ ⎢⎣∆β ⎥⎦
⎢⎣∆θ ⎥⎦ ⎢ − sin θ
r
⎣ r
⎦
12.6 (a) For direct form implementation B( z) = ( z − z1 )( z − z 2 )( z − z3 ), where
z1 = r1e jθ1 , z 2 = r2 e jθ 2 , and z 3 = r3 e jθ 3 . Thus, B( z) = ( z 2 − 2r1 cos θ1 z + r12 )( z − r3 )
= ( z 2 + 0.5625 z + 0.7386 )( z − 0.0606 ). This implies,
2r1 cos θ1 = −0.5625, r12 = 0.7386, r3 = 0.0606, and θ3 = π. Thus, r1 = 0.7386 = 0.8594
and cos θ1 =
− 0.5625
2 0.7386
= −0.3273. Now,
1
1
=
=
B( z) ( z 2 + 0.5625z + 0.7386)( z − 0.0606)
− 0.6440 + j 0.2711
1.2811
− 0.6440 − j 0.2711
+
+
.
z + 0.2813 + j 0.8121 z + 0.2813 − j 0.8121 z + 0.0606
[
[
]
]
P1 = cos θ1 r1 r12 cos θ1 = [− 0.3273 0.8594 − 0.2417],
Q1 = sin θ1 0 r12 sin θ1 = [− 0.9449 0 0.6979], R1 = −0.6440, and X1 = 0.2711.
Likewise, P3 = cos θ3 r3 r32 cos θ3 = [− 1 0.0606 − 0.0037],
[
[
]
]
Q 3 = sin θ3 0 r32 sin θ3 = [0 0 0], R3 = 1.2881, and X 3 = 0.
Thus, ∆r 1= (− R1P1 + X1Q1 ) ⋅ ∆B = − 0.4669 ∆b0 + 0.5535 ∆b1 + 0.0335 ∆b 2 ,
1
∆θ1 = − ( X1P1 + R1Q1 ) ⋅ ∆B = 0.8113∆b0 − 0.2711∆b1 − 0.4467∆b2 ,
r1
∆r 3 = (− R3 P3 + X 3Q 3 ) ⋅ ∆B = 1.2881∆b0 − 0.0781∆b1 + 0.0048∆b2 , and
1
∆θ3 = − ( X 3 P3 + R3Q 3 ) ⋅ ∆B = 0.
r3
Not for sale
434
Cascade form: B( z) = ( z 2 + c1z + c0 )(z + d 0 ) = B1 ( z) B2 ( z ), where
B1 ( z ) = z 2 + c1 z + c 0 = z 2 + 0.5625 z + 0.7386 = ( z − r1e jθ1 )( z − r1e − jθ1 ) = z 2 − 2r cos θ1 z + r12
(b)
and B2 ( z ) = z + d 0 = z − 0.0606 = z −r 3 e jθ 3 . Comparing we get
2r 1cos θ1 = 0.5625, r12 = 0.7386, r3 = 0.0606, θ3 = π. Solving the first two equations we get
r1 = 0.7386 = 0.8594 and cos θ1 =
− 0.5625
= −0.3273.
2 0.7386
1
j 0.6157
− j 0.6157
Now,
. Hence, R1 = 0 and
=
+
B( z1 ) z + 0.2813 − j 0.8121 z + 0.2813 + j 0.8121
X1 = −0.6157. P1 = [cos θ1 r1 ] = [ − 0.3273 0.8594], Q1 = [ − sin θ1 0] = [ − 0.9449 0].
1
1
Next,
. Hence, R3 = 1 and X 3 = 0. Here, P3 = cos θ3 = −1, and
=
B2 ( z ) z + 0.0606
Q 3 = − sinθ 3 = 0. Thus,
∆r = ( − R P + X Q ) ⋅ [ ∆ c
∆c ] t = X Q ⋅ [ ∆c
∆c ]t = 0.5818 ∆c ,
1
1 1
1 1
0
1 1
0
1
0
1
⋅ X1P1 ⋅ [ ∆c 0 ∆c1 ]t = −0.23458 ∆c0 + 0.6157∆c1 ,
r1
1
1
∆r3 = (− R3 P3 + X 3Q 3 ) ⋅ ∆d 0 = − ∆d 0 , ∆θ3 = − ( X 3 P3 + R3 Q 3 ) ⋅ ∆d 0 = − R3 Q 3 ⋅∆d 0 = 0
r3
r3
.
12.7 In terms of the transfer parameters, the input-output relation of the two-pair of Figure P12.3 is
given by Y1 ( z) = t11 X1 ( z) + t12 X 2 ( z) and Y2 ( z) = t 21 X1 ( z) + t 22 X 2 ( z). The constraining
equation of the two-pair is given by X 2 ( z) = αY2 ( z). From Eq. (7.135b) we get
Y ( z)
αt t
t12 t 21
∂ H ( z) t12 t 21 (1 − αt 22 ) + t 22 α t12 t 21
H ( z) = 1
= t11 + 12 21 . Hence,
=
.
=
∂α
1 − α t 22
X1 ( z )
(1 − αt 22 ) 2
(1 − αt 22 ) 2
∆θ1 = −
1
( X1P1 + R1Q1 ) ⋅ [ ∆c 0
r1
1
∆c1 ]t = −
Substituting X 2 ( z) = αY2 ( z) in Y2 ( z) = t 21 X1 ( z) + t 22 X 2 ( z), we get the expression for the
Y ( z)
t 21
.
=
scaling transfer function Fα ( z ) = 2
X1 ( z) 1 − α t 22
Next, from the structure given below we observe that the noise transfer function is given by
Y ( z)
. From the structure we also observe that X 2 ( z) = αY2 ( z) + U ( z).
Gα ( z) = 1
U ( z) X ( z) = 0
1
Substituting this in the transfer relations we arrive at, with X1 ( z) = 0,
Y1 ( z) = t12 X 2 ( z) = t12 (α X 2 ( z) + U ( z)) and Y2 ( z) = t 22 X 2 ( z) = t 22 (αY2 ( z) + U ( z)). From
these two equations we obtain, after some algebra,
t12
αt t
Y1 ( z) = 12 22 U ( z ) + t12U ( z ) =
U ( z). Hence, the noise transfer function is given by
1 − α t 22
1 − α t 22
t 21
t
∂ H (z)
Y (z)
t12
=
⋅ 12 = Fα ( z)Gα ( z).
. Therefore,
=
Gα ( z) = 1
∂α
1 − αt 22 1 − αt 22
U ( z ) X ( z ) = 0 1 − α t 22
1
Not for sale
435
N /2
⎡ 1 ⎛
⎞⎤
⎜1 + 4
cos 2 (ωn) ⎟ ⎥
=⎢
⎟⎥
⎢ 2 N + 1 ⎜⎝
n =1
⎠⎦
⎣
maximum value of cos 2 (ωn) is 1 and the minimum value is 0, hence,
⎡ 1 ⎛
sin[( N + 1)ω] ⎞ ⎤
12.8 (a) WN (ω) = ⎢
⎜N +
⎟⎟ ⎥
⎜
sin(ω)
⎠⎦
⎣ 2N + 1 ⎝
⎡ 1 ⎛
4 N ⎞⎤
max{WN (ω)} = ⎢
⎟
⎜1 +
2 ⎠ ⎥⎦
⎣ 2N + 1 ⎝
0 < WN (ω) ≤ 1.
N / 2 ⎞⎤
⎡ 1 ⎛
⎜ 1 + 4 1⎟ ⎥
(b) WN (0) = ⎢
⎟
⎢ 2 N + 1 ⎜⎝
m =1 ⎠ ⎥⎦
⎣
∑
1/ 2
1/ 2
1/ 2
1/ 2
∑
⎡ 1 ⎤
= 1 and min{WN (ω)} = ⎢
⎥
⎣ 2 N + 1⎦
1/ 2
N / 2 ⎞⎤
⎡ 1 ⎛
⎜ 1 + 4 1⎟ ⎥
= 1. WN (π ) = ⎢
⎟
⎢ 2 N + 1 ⎜⎝
m =1 ⎠ ⎥⎦
⎣
∑
. Since the
> 0. Therefore,
1/ 2
= 1.
1/ 2
1
sin(( N + 1)ω) ⎤
N
⎡
(c) lim WN (π ) = ⎢ lim
. Since
+ lim
⋅
⎥
sin(ω)
N →∞
⎣N →∞ 2N + 1 N →∞ 2N + 1
⎦
1
1
sin(( N + 1)ω)
sin(( N + 1)ω) ≤ 1, lim
⋅
= 0. Hence, lim WN (π ) =
.
sin(ω)
N →∞
N →∞ 2N + 1
2
12.9
From Eq. (12.75), SNR A / D = 6.0206 b + 16.81 − 20 log10 ( K ) dB. For a constant value of K,
an increase in b by 1 bit, increases the SNR A / D by 6.0206 dB and an increase in b by 2 bits,
increases the SNR A / D by 12.0412 dB.
If K = 4 and b = 7, then SNR A / D = 6.0206 × 7 + 16.81 − 20 log10 (4) = 46.9122 dB. Therefore,
for K = 4 and b = 9, SNR A / D = 46.91 + 12.04 = 58.95 dB; for K = 4 and b = 11,
SNR A / D = 58.95 + 12.04 = 70.99 dB; for K = 4 and b = 13, SNR A / D = 70.99 + 12.04 =
83.03 dB; for K = 4 and b = 15, SNR A / D = 83.03 + 12.04 = 95.08 dB.
If K = 6 and b = 7, then SNR A / D = 6.0206 × 7 + 16.81 − 20 log10 (6) = 43.3902 dB. Therefore,
for K = 6 and b = 9, SNR A / D = 43.39 + 12.04 = 55.43 dB; for K = 6 and b = 11,
SNR A / D = 55.43 + 12.04 = 67.47 dB; for K = 6 and b = 13, SNR A / D = 67.47 + 12.04 =
79.51 dB; for K = 6 and b = 15, SNR A / D = 79.51 + 12.04 = 91.56 dB.
If K = 8 and b = 7, then SNR A / D = 6.0206 × 7 + 16.81 − 20 log10 (8) = 40.8922 dB. Therefore,
for K = 8 and b = 9, SNR A / D = 40.89 + 12.04 = 52.93 dB; for K = 8 and b = 11,
SNR A / D = 52.93 + 12.04 = 64.97 dB; for K = 8 and b = 13, SNR A / D = 64.97 + 12.04 =
77.01 dB; for K = 8 and b = 15, SNR A / D = 77.01 + 12.04 = 891.05 dB.
Not for sale
436
N
N
Ak
Ak
ak z + 1 N
,
12.10 (a) H ( z) =
=
Ck
−
Ck ak =
C k Fk ( z ) + B, where C k =
2
z
+
a
z
+
a
−
1
a
k
k
k =1
k =1
k =1
k =1
k
N
∑
∑
∑
∑
N
a z +1
, and B = − C k a k .
Fk ( z ) = k
z + ak
k =1
∑
N
⎤
⎤⎡ N
1
1 ⎡
1
1
−
−
⎢ C k Fk ( z ) + B⎥ ⎢ C k Fk ( z −1 ) + B⎥ z −1dz
H ( z )H ( z )z dz =
=
2πj
2πj ⎢ k =1
⎥⎦
⎥⎦ ⎢⎣ k =1
C
C⎣
(b)
∫ ∑
∫
σ o2
N
∑
N
∑ ∫
∑ ∫
1
=
[ B 2 z −1dz + B C k Fk (z)z −1dz + B C l Fl (z −1 )z −1dz
2πj
k =1
l =1
∫
C
+
C
N N
C
∑ ∑ C k Cl ∫ Fk (z)Fl (z)z −1dz] .
k = 1l = 1
C
1
1
1
B 2 z −1dz = B 2 ,
Fk ( z)z −1dz = a k ,
Fl ( z −1 )z −1dz = a l , and
2πj
2πj
2πj
Now,
∫
∫
∫
C
C
C
1 − a k2 − a l2 + a k a l
1
−
1
. Therefore,
Fk ( z)Fl ( z)z dz =
2πj
1 −a k a l
∫
C
N
1 − a k2 − a l2 + a k a l
=
+ 2 B Ck ak +
. Since,
C k a k = − B, we have
−
a
a
1
k
l
k = 1l = 1
k =1
k =1
N N 1 − a2 − a2 + a a
k l
l
k
σ o2 = − B 2 +
C k Cl
1
−
a
a
k
l
k = 1l = 1
N N
N
σ o2
∑
B2
∑∑
∑
∑∑
1 − a k2 − a l2 + a k a l
=−
C k C l a k al +
Ck Cl
1 − a k al
k = 1l = 1
k = 1l = 1
N N
N N
∑∑
∑∑
N N
⎡1 − a 2 − a 2 + a k al
⎤
⎤
Ak
A l ⎡1 − a k2 − a l2 + a k a l
l
k
⎢
− ak a⎥ =
⋅
− ak a⎥
C k Cl ⎢
1 − ak al
1 − ak al
⎢⎣
⎥⎦ k =1l =11 − a k2 1 − a l2 ⎢⎣
⎥⎦
k = 1l = 1
N N
Ak
A l ⎡ (1 − a k2 )(1 − a l2 ) ⎤ N N A k A l
⎢
⎥=
=
⋅
.
(A)
2
2
1 − a k al
⎥⎦ k =1l =11 − a k a l
k =1l =1 1 − a k 1 − a l ⎢⎣
N A2
N −1 N
N −1 N
A k Al
A k Al
k
+
+
Further, σ o2 =
2
1 − a k a l l =1 k = l + 1 1 − a k a l
k = 11 − a
k =1 l = k + 1
=
N N
∑∑
∑∑
∑∑
∑∑
∑
=
N
N −1
Ak2
∑ ∑
∑ ∑
k
N
∑ 1 − a2 + 2 ∑ ∑
k =1
k
A k Al
.
−
a
a
1
k
l
k =1 l = k + 1
(c) See Eq. (A).
Not for sale
437
12.11 (a) H1 ( z) =
− 16.1
18.9
( z − 2)( z + 4)
+
= 1+
. Making use of Eq. (12.87) and Table
z − 0.6 z − 0.2
( z − 0.2)( z − 0.6)
(−16.1) 2
2 × (−16.1) × (18.9)
1 − (0.6) × (0.2)
1 − (0.6) 2 1 − (0.2) 2
= 1 + 405.0156 + 372.0937 − 691.5682 = 86.5411 .
12.4, we get σ12, n = 1 +
+
(18.9) 2
+
Output of Program 12_4.m is 86.5412.
(b) H 2 ( z) =
2(3z − 1)(2 z 2 − 4 z + 1)
(2 z − 1)(z + 0.5)( z 2 + 0.8z + 0.5)
=
25
− 0.2174 − 18.7826 z − 21.2174
.
+
+
z + 0.5
z − 0.5
z 2 + 0.8z + 0.5
Making use of Eq. (12.87) and Table 12.4, we get σ 22, n =
+
+
+
2 × 25 × (−0.2174)
+
1 + 0.25
(25) 2
1 − (0.5) 2
2 × 25 × [ −18.7826 + (−21.2174) × (−0.5)]
+
(0.2174) 2
1 − (0.5) 2
1 + 0.8 × (−0.5) + 0.5 × (−0.5) 2
2 × (−0.2174) × [ −18.7826 + (−21.2174) × 0.5]
1 + 0.8 × 0.5 + 0.5 × (0.5) 2
[(−18.7826) 2 + (−21.2174) 2 ] × (1 − 0.5) 2 − 2 × (−18.7826) × (−21.2174) × (1 − 0.5) × 0.8
[1 − (0.5) 2 ]2 + 2 × (0.5) × (0.8) 2 − [1 + (0.5) 2 ] × (0.8) 2
= 833.3333 + 0.0630 − 8.6960 − 563.7172 + 8.3799 + 704.1211 = 973.4841.
(25) 2
(0.2174) 2 2(25)(−0.2174) 2(25)(−18.7826 + (−21.2174) *(−0.5))
σ 2,2 n =
+
+
+
1 − (0.5) 2 1 − (0.5) 2
1 + 0.25
1 + 0.8(−0.5) + 0.5(−0.5) 2
2(−0.2174)(−18.7826 + (−21.2174) *(0.5))
+
1 + 0.8(0.5) + 0.5(0.5) 2
[(−18.7826) 2 + (−21.2174) 2 ](1 − 0.5) 2 − 2(−18.7826)(−21.2174)(1 − 0.5)(0.8)
(1 − 0.52 ) 2 + 2(0.5)(0.8) 2 − (1 + 0.52 )(0.8) 2
= 833.3333 + 0.0630 − 8.6960 − 563.7172 − 8.3799 − 704.1211 = 973.4841
Output of Program 12_4.m is 973.4831.
+
( z + 1) 2
1.4 z + 0.6
(c) H 3 ( z) =
. Making use of Eq. (12.87) and Table 12.4,
= 1+
z 2 + 0.6 z + 0.4
z 2 + 0.6 z + 0.4
[(1.4) 2 + (0.6) 2 ][1 − (0.4) 2 ] − 2 × 1.4 × 0.6 × 0.6(1 − 0.4)
we get σ 32, n = 1 +
[1 − (0.42) 2 ] + 2 × 0.4 × (0.6) 2 − [1 + (0.4) 2 ](0.6) 2
= 1 + 2.3333 = 3.3333.
Output of Program 12_4.m is 3.3333.
(d) H 4 ( z) =
− 0.825 4.1667 − 4.4917
( z − 2.5)( z + 1.25)( z + 1)
= 1+
+
+
.
z + 0.8 z + 0.5
z − 0.4
( z − 0.4)( z _ 0.8)( z + 0.5)
Not for sale
438
Making use of Eq. (12.87) and Table 12.4, we get
(0.825) 2 (4.1667) 2 (4.4917) 2 2 × 0.825 × 4.1667 2 × 0.825 × 4.4917
σ 42, n = 1 +
+
+
+
+
1 − 0.4
1 + 0.32
1 − (0.8) 2 1 − (0.5) 2 1 − (0.4) 2
2 × 4.4917 × 4.1667
+
= 1 + 1.8906 + 23.1485 + 24.0183 − 11.4584 + 5.6146 − 31.1926
1 + 0.25
= 13.021.
Output of Program 12_4.m is 13.0208.
12.12 H ( z ) = A +
B
C
.
+
z+ β z+γ
σ 2n = A 2 +
B2
1−β
2
+
C2
1− γ
2
+
2 BC
. For β = 0.6, γ = −0.8,
1 − βγ
A = 3, B = −4, C = 2, we get
σ 2n = 3 2 +
42
2
+
22
2
+
2 × ( −4 ) × 2
= 34.3003.
1 − ( − 0 .6 ) × ( 0 .8 )
1 − ( 0 .6 )
1 − ( 0 .8 )
Output of Program 12_4.m is 34.3003.
12.13 (a) Quantization of products before addition
Direct Form II - The noise model is shown below.
e 2[n]
p
0
x[n]
y[n]
_1
z
_d
1
e 1[n]
p
1
e 3[n]
The noise transfer function from the noise source e1[ n] to the filter output is
p + p1 z −1 p 0 z + p1
p −p d
G1 ( z ) = 0
=
= p0 + 1 0 1 .
−
1
z + d1
z + d1
1 + d 1z
The corresponding normalized noise variance at the output is σ12 = p02 +
( p1 − p0 d1 ) 2
.
1 − d12
The noise transfer function from the noise sources e2 [ n] and e3 [ n] to the filter output is
G2 ( z) = G3 ( z) = 1. The corresponding normalized noise variance at the output is
σ 22 = σ 32 = 1. Hence the total noise variance at the output is σ o2 = σ12 + σ 22 + σ 32
( p − p0 d1 ) 2
= 2 + p02 + 1
.
1 − d12
Not for sale
439
Direct Form IIt - The noise model is shown below.
e 2[n]
p
x[n]
0
y[n]
_
z1
p
_d
1
1
e 3[n]
e 1[n]
E ( z ) z −1 + E 2 ( z ) + E 3 ( z ) z −1
Analyzing the structure, we have that Y ( z ) = 1
.
1 + d 1z −1
The noise transfer function from e1[ n] to the filter output is
Y ( z)
z −1
1
. The corresponding normalized noise
=
=
E1 ( z ) E ( z ) = E ( z ) = 0 1 + d1 z −1 z + d1
2
3
1
variance at the output is σ12 =
.
1 − d12
G1 ( z) =
The noise transfer function from e2 [ n] to the filter output is
d
1
z
Y ( z)
G2 ( z ) =
=
=
= 1 − 1 . The corresponding
z + d1
E1 ( z ) E ( z ) = E ( z ) = 0 1 + d1 z −1 z + d1
1
3
normalized noise variance at the output is σ 22 = 1 +
d12
1 − d12
=
1
1 − d12
.
The noise transfer function from e3 [ n] to the filter output is
Y (z)
z −1
1
. The corresponding normalized noise
=
=
−
1
E 3 ( z) E ( z ) = E ( z ) = 0 1 + d1 z
z + d1
1
2
1
variance at the output is σ 32 =
.
1 − d12
G3 ( z ) =
Hence the total noise variance at the output is σ o2 = σ12 + σ 22 + σ 32 =
3
1 − d12
.
(b) Quantization of products after addition
( p − p0 d1 ) 2
Direct Form II - σ o2 = σ12 + σ 22 + σ 32 = 2 + p02 + 1
.
1 − d12
Direct Form IIt - σ o2 = σ12 + σ 22 + σ 32 =
3
1 − d12
.
12.14 (a) Quantization of products before addition
Not for sale
440
Cascade Structure #1: G( z ) =
(1 + 0.4 z −1 )(1 − 0.3z −1 )
(1 + 0.2 z −1 )(1 − 0.6 z −1 )
. The noise model of this structure is as
below
x[n]
+
+
+
+
_
z 1
_
z 1
_
+
0.2
0.4
+
+
_ 0.3
0.6
+
e 4[n]
e 2[n] e 3[n]
e 1[n]
y[n]
The noise transfer function from the noise source e1[ n] to the filter output is
( z + 0.4)( z − 0.3)
0.375
0.125
G1 ( z ) =
.
= 1+
+
z − 0.6 z + 0.2
( z + 0.2)( z − 0.6)
The corresponding normalized noise variance at the output is
(0.375) 2
(0.125) 2
20.375 × 0.125
σ12, n = 1 +
+
+
= 1.3197.
1 − (0.6) 2 1 − (−0.2) 2 1 − 0.6 × (−0.2)
Output of Program 12_4.m is 1.3197.
The noise transfer function from the noise sources e2 [ n] and e3 [ n] to the filter output is
z − 0.3
0.3
.
= 1+
G2 ( z ) =
z − 0.6
z − 0.6
The normalized noise variance at the output due to each of these noise sources is
(0.3) 2
σ 22, n = 1 +
= 1.1406.
1 − (0.6) 2
Output of Program 12_4.m is 1.1406.
The noise transfer function from the noise source e4 [ n] to the filter output is G 4 ( z) = 1.
The corresponding normalized noise variance at the output is σ 42, n = 1.
Hence the total normalized noise variance at the output is σ n2 = σ12, n + 2σ 22, n + σ 42, n = 4.6009.
(1 − 0.3z −1 )(1 + 0.4 z −1 )
. The noise model of this structure is as
Cascade Structure #2: G( z ) =
(1 + 0.2 z −1 )(1 − 0.6 z −1 )
below:
x[n]
+
+
_
z 1
_
+
0.2
e 1[n]
+
+
y[n]
_
z 1
_ 0.3
+
+
0.6
e 2[n] e 3[n]
Not for sale
0.4
+
e 4[n]
441
σ12, n = 1.3197 as in Structure#1.
The noise transfer function from the noise sources e2 [ n] and e3 [ n] to the filter output is
(1) 2
z + 0.4
1
= 2.5625.
. Hence, σ 22, n = 1 +
= 1+
G2 ( z ) =
z − 0.6
z − 0.6
1 − (0.6) 2
Output of Program 12_4.m is 2.5625.
The noise transfer function from the noise source e4 [ n] to the filter output is G 4 ( z) = 1.
The corresponding normalized noise variance at the output is σ 42, n = 1.
Hence the total normalized noise variance at the output is σ n2 = σ12, n + 2σ 22, n + σ 42, n = 7.4447.
Cascade Structure #3: G( z ) =
(1 − 0.3z −1 )(1 + 0.4 z −1 )
(1 − 0.6 z −1 )(1 + 0.2 z −1 )
. The noise model of this structure is as
below:
x[n]
+
+
+
+
_
z 1
_
z 1
+
_ 0.3
0.6
_
+
+
0.4
0.2
+
e 4[n]
e 2[n] e 3[n]
e 1[n]
y[n]
σ12, n = 1.3197 as in Structure#1.
The noise transfer function from the noise sources e2 [ n] and e3 [ n] to the filter output is
(0.2) 2
z + 0.4
0.2
= 1.0417.
. Hence, σ 22, n = 1 +
= 1+
G2 ( z ) =
z + 0.2
z + 0.2
1 − (0.2) 2
Output of Program 12_4.m is 1.0417.
The noise transfer function from the noise source e4 [ n] to the filter output is G 4 ( z) = 1.
The corresponding normalized noise variance at the output is σ 42, n = 1.
Hence the total normalized noise variance at the output is σ n2 = σ12, n + 2σ 22, n + σ 42, n = 4.4031.
(1 + 0.4 z −1 )(1 − 0.3z −1 )
. The noise model of this structure is as
Cascade Structure #4: G( z ) =
(1 − 0.6 z −1 )(1 + 0.2 z −1 )
below:
x[n]
+
+
+
+
_
z 1
_
z 1
+
0.6
e 1[n]
y[n]
0.4
_
+
+
0.2
e 2[n] e 3[n]
_
0.3
+
e 4[n]
σ12, n = 1.3197 as in Structure#1.
The noise transfer function from the noise sources e2 [ n] and e3 [ n] to the filter output is
Not for sale
442
(−0.5) 2
z − 0.3
− 0.5
= 1.2604.
. Hence, σ 22, n = 1 +
= 1+
z + 0.2
z + 0.2
1 − (0.2) 2
Output of Program 12_4.m is 1.2604.
The noise transfer function from the noise source e4 [ n] to the filter output is G 4 ( z) = 1.
G2 ( z ) =
The corresponding normalized noise variance at the output is σ 42, n = 1.
Hence the total normalized noise variance at the output is σ n2 = σ12, n + 2σ 22, n + σ 42, n = 4.8405.
Hence, the Cascade Structure #3 has the smallest round off noise variance.
(b) Quantization of products after addition. From the results of Part (a)
Cascade Structure #1: σ n2 = σ12, n + σ 22, n + σ 42, n = 3.4603.
Cascade Structure #2: σ n2 = σ12, n + σ 22, n + σ 42, n = 4.8822.
Cascade Structure #3: σ n2 = σ12, n + σ 22, n + σ 42, n = 3.614.
Cascade Structure #4: σ n2 = σ12, n + σ 22, n + σ 42, n = 3.5801.
Hence, the Cascade Structure #1 has the smallest round off noise variance.
12.15 (a) Quantization of products before addition.
− 0.625
(1 + 0.4 z −1 )(1 − 0.3z −1 )
0.625
= 1+
+
.
Parallel Form #1: G( z ) =
−
1
−
1
−
1
(1 + 0.2 z )(1 − 0.6 z )
1 − 0.6 z
1 + 0.2 z −1
The noise model of this structure is shown below:
0.625
e 2[n]
+
+
x[n]
y[n]
_
z 1
e 1[n]
0.6
+
0.6
e 4[n]
+
_
z 1
e 3[n]
+
_ 0.2
The noise transfer function from the noise sources e1[n] and e2 [n] to the filter output is
z
0.6
G2 ( z ) =
. The corresponding normalized noise variance at the output is
= 1+
z − 0.6
z − 0.6
σ 22, n = 1 +
(0.6) 2
1 − (0.6) 2
= 1.5625.
Not for sale
443
The noise transfer function from the noise sources e3 [n] and e4 [n] to the filter output is
− 0.2
z
= 1+
. The corresponding normalized noise variance at the output is
G4 ( z) =
z + 0.2
z + 0.2
σ 22, n = 1 +
(−0.2) 2
1 − (0.2) 2
= 1.0417.
Hence the total noise variance at the output is σ n2 = 2σ 22, n + 2σ 42, n = 5.2804.
0.375
0.125
0.375z −1
0.125z −1
.
+
= 1+
+
z − 0.6 z + 0.2
1 − 0.6 z −1 1 + 0.2 z −1
The noise model of this structure is shown below:
Parallel Form #2: G( z) = 1 +
0.375
e 2[n]
_
z 1
+
x[n]
e 1[n]
0.125
+
y[n]
0.6
e 4[n]
+
e 3[n]
+
+
_
z 1
_ 0.2
The noise transfer function from the noise sources e1[n] and e2 [ n] to the filter output is
G2 ( z) =
z −1
1 − 0.6 z −1
=
1
. The corresponding normalized noise variance at the output is
z − 0.6
(1) 2
σ 22, n =
= 1.5625.
1 − (0.6) 2
The noise transfer function from the noise sources e3 [n] and e4 [n] to the filter output is
G4 (z) =
σ 22, n =
z −1
1 + 0.2 z −1
(1) 2
1 − (0.2) 2
=
1
. The corresponding normalized noise variance at the output is
z + 0.2
= 1.0417.
Hence the total noise variance at the output is σ n2 = 2σ 22, n + 2σ 42, n = 5.2804.
Therefore, both parallel forms have identical round off noise variances.
(b) Quantization of products after addition. From the results of Part (a)
Not for sale
444
Parallel Form #1: σ n2 = σ 22, n + σ 42, n = 2.6402.
Parallel Form #2: σ n2 = σ 22, n + σ 42, n = 2.6402.
Hence, both parallel forms have the same round off noise variances.
2 − 0.4 z −1 − 0.6 z −2
12.16 (a) Direct Form II realization H ( z) =
1 + 0.2 z −1 − 0.15z − 2
is shown below along with the
noise model.
x[n]
2
+
_
+
_
z 1
+
+
e1 [n]
_
z 1
y[n]
e3 [n]
_ 0.4
0.2
+
+
+
e4 [n]
_ 0.6
0.15
+
+
e2 [n]
e5 [n]
The noise transfer function from e1[ n] and e2 [ n] to filter output is
G1 ( z ) = H ( z) =
2 − 0.4 z −1 − 0.6 z −2
1 + 0.2 z −1
=2+
− 0.15z − 2
− 0.125 − 0.675
. The corresponding normalized
+
z + 0.5 z − 0.3
noise variance at the output is
σ12, n = (2) 2 +
(−0.125) 2
+
(−0.675) 2
1 − (−0.5) 2 1 − (0.3) 2
Output of Program 12_4.m is 4.6683.
+
2 × (−0.125) × (−0.675)
= 4.6683.
1 − 0.3 × (−0.5)
The noise transfer function from the noise sources e3 [ n] , e4 [ n] to the filter output is
G3 ( z ) = 1.
The corresponding normalized noise variance at the output is σ 32, n = 1.
Hence the total noise variance at the output is σ n2 = 2σ12, n + 3σ 32, n = 12.1898.
(b) Cascade Form: H ( z ) =
2(1 − 0.6568z −1 )(1 + 0.4568z −1 )
. There are more than 2 possible
(1 − 0.3z −1 )(1 + 0.5z −1 )
cascade realizations. We consider here only two structures.
⎛ 1 − 0.6568 z −1 ⎞⎛ 1 + 0.4568 z −1 ⎞
⎟. The noise model of this
⎟⎜
Cascade Form #1 - H ( z ) = 2⎜⎜
− 1 ⎟ ⎜ 1 + 0 .5 z − 1 ⎟
1
0
.
3
z
−
⎠
⎠⎝
⎝
structure is on the next page.
Not for sale
445
2
+
x[n]
+
+
_
z 1
e 1[n]
+
0.3
_
+
+
y[n]
_
z 1
0.6568
+
+
_ 0.5
0.4568
+
e 3[n] e 4[n]
e 2[n]
e 5[n]
The noise transfer function from e1[ n] and e2 [ n] to filter output is
1 − 0.2 z −1 − 0.3z −2
− 0.0625 − 0.3375
G1 ( z ) =
. The corresponding normalized noise
= 1+
+
z + 0.5
z − 0.3
1 + 0.2 z −1 − 0.15z − 2
variance at the output is
(−0.0625) 2 (−0.3375) 2 (−0.0625) × (−0.3375)
σ12, n = (1) 2 +
+
+
= 1.1671.
1 − 0.3 × (−0.5)
1 − (−0.5) 2
1 − (0.3) 2
Output of Program 12_4.m is 1.1671.
The noise transfer function from e3 [ n] and e4 [ n] to filter output is
G3 ( z ) =
1 + 0.4568z −1
1 + 0.5z −1
=
− 0.0432
z + 0.4568
. The corresponding normalized noise
= 1+
z + 0.5
z + 0.5
variance at the output is σ 32, n = (1) 2 +
(−0.0432) 2
1 − (0.5) 2
= 1.0025.
Output of Program 12_4.m is 1.0025.
The noise transfer function from the noise source e5 [ n] to the filter output is G5 ( z ) = 1.
The corresponding normalized noise variance at the output is σ 32, n = 1.
Hence the total noise variance at the output is σ n2 = 2σ12, n + 2σ 32, n + σ 52, n = 5.3392
⎛ 1 + 0.4568 z −1 ⎞⎛ 1 − 0.6568 z −1 ⎞
⎟. The noise model of this
⎟⎜
Cascade Form #2 - H ( z ) = 2⎜⎜
− 1 ⎟ ⎜ 1 + 0 .5 z − 1 ⎟
1
0
.
3
z
−
⎠
⎠⎝
⎝
structure is shown below:
2
x[n]
+
+
+
+
+
_
z 1
e 1[n]
+
0.3
e 2[n]
_
z 1
0.4568
+
+
_ 0.5
e 3[n] e 4[n]
_
y[n]
0.6568
+
e 5[n]
The noise transfer function from e1[ n] and e2 [ n] to filter output is same as for the Cascade
Structure #1. Hence, the corresponding normalized noise variance at the output is
σ12, n = 1.1671 .
Not for sale
446
The noise transfer function from e3 [ n] and e4 [ n] to filter output is
G3 ( z ) =
1 − 0.6568z −1
1 + 0.5z −1
=
− 1.1568
z + 0.6568
. The corresponding normalized noise
= 1+
z + 0.5
z + 0.5
variance at the output is σ 32, n = (1) 2 +
(−1.1568) 2
1 − (0.5) 2
= 2.7842.
Output of Program 12_4.m is 2.7842.
The noise transfer function from the noise source e5 [ n] to the filter output is G5 ( z ) = 1.
The corresponding normalized noise variance at the output is σ 52, n = 1.
Hence the total noise variance at the output is σ n2 = 2σ12, n + 2σ 32, n + σ 52, n = 6.1184.
(c) Parallel Form I realization - H ( z) = 4 +
0.25
1 + 0.5z −1
+
− 2.25
1 − 0.3z −1
. The noise model of this
structure is shown below:
4
0.25
e 2[n]
+
e 1[n]
+
+
x[n]
y[n]
_
z 1
e 3[n]
_ 2.25
+
_ 0.5
e 4[n]
+
_
z 1
e 5[n]
+
0.3
The noise transfer function from e2 [ n] and e3 [ n] to filter output is
1
− 0.5
. The corresponding normalized noise variance at the output is
= 1+
G2 ( z ) =
z + 0.5
1 + 0.5z −1
σ 22, n = (1) 2 +
(−0.5) 2
=
4
.
3
1 − (0.5) 2
The noise transfer function from e4 [ n] and e5 [ n] to filter output is
1
0.3
. The corresponding normalized noise variance at the output is
= 1+
G4 (z) =
z − 0.3
1 − 0.3z −1
σ 42, n = (1) 2 +
(0.3) 2
= 1.0989.
1 − (−0.3) 2
The noise transfer function from the noise source e1[ n] to the filter output is G1 ( z) = 1.
Not for sale
447
The corresponding normalized noise variance at the output is σ12, n = 1.
Hence the total noise variance at the output is σ n2 = σ12, n + 2σ 22, n + σ 42, n = 5.8645.
Parallel Form II realization. - H ( z) = 2 +
− 0.125 − 0.675
+
. The noise model of this structure
z + 0.5 z − 0.3
is shown below:
2
_ 0.125
e 2[n]
e 3[n]
_ 0.675
+
+
y[n]
_ 0.5
e 4[n]
+
e 5[n]
e 1[n]
_
z 1
+
x[n]
+
+
_
z 1
0.3
1
. The
z + 0.5
1
4
= .
corresponding normalized noise variance at the output is σ 22, n =
2
3
1 − (0.5)
1
. The
The noise transfer function from e4 [ n] and e5 [ n] to filter output is G 4 ( z ) =
z − 0.3
1
= 1.0989.
corresponding normalized noise variance at the output is σ 42, n =
1 − (−0.3) 2
The noise transfer function from the noise source e1[ n] to the filter output is G1 ( z) = 1.
The noise transfer function from e2 [ n] and e3 [ n] to filter output is G2 ( z) =
The corresponding normalized noise variance at the output is σ12, n = 1.
Hence the total noise variance at the output is σ n2 = σ12, n + 2σ 22, n + σ 42, n = 5.8645.
12.17 H ( z) =
2 − 0.4 z −1 − 0.6 z −2
. Using Program 8_5.m, the Gray-Markel realization of H(z) is
1 + 0.2 z −1 − 0.15z − 2
found to be as shown on top of the next page where
d 2 = 0.2353, d1' = −0.15, α1 = −0.6, α 2 = −0.28, α3 = 1.9759.
(a) For quantization of products before addition, the noise model is shown on the next page:
Not for sale
448
e1 [n]
e2 [n]
x[n]
_d
_ d'
1
2
d 1'
d2
_1
_
z1
z
e4 [n]
α1
e3 [n]
α2
α3
y[n]
e5 [n]
Analyzing the above structure, we obtain the noise transfer function for each noise source,
2 − 0.4 z −1 − 0.6 z −2
e i [ n], 1 ≤ i ≤ 7 : G1 ( z) = H ( z) =
,
1 + 0.2 z −1 − 0.15z − 2
(α2 d1' + α3 ) + [α1 (1 − d 22 )d1' + α2 ]z −1 + α1 (1 − d 22 )z − 2
G2 ( z ) =
1 + 0.2 z −1 − 0.15z − 2
2.0179 − 0.1950 z −1 − 0.5668z −2
,
=
1 + 0.2 z −1 − 0.15z − 2
α2 + [α1 (1 − d 22 ) − α2 d1' d 2 −α3 d 2 ]z −1 + α1 (1 − d 22 )d1' d 2 z − 2
G3 ( z ) =
1 + 0.2 z −1 − 0.15z − 2
− 0.28 − 1.0416 z −1 + 0.02 z −2
,
=
1 + 0.2 z −1 − 0.15z − 2
G 4 ( z) = α1 = −0.6, G5 ( z) = G6 ( z) = G7 ( z ) = 1.
Using Program 12_4.m, we get σ12, n = 4.6683, σ 22, n = 4.4549, σ 32, n = 1.1199, σ 42, n = 0.36.
Hence, the total normalized output noise variances = 4.6683 + 4.459 + 1.1199 + 0.36 + 3(1) =
13.6072.
(b) The realization along with the noise model for the quantization of products after addition is the
same as in Part (a).
The noise transfer functions from the noise sources e2 [ n], e3 [ n], and e4 [ n], are G2 ( z),
G3 ( z ), and G 4 ( z), respectively and are given in Part (a). Their corresponding noise variances
were also derived in Part (a) and are given by σ 22, n = 4.4549, σ 32, n = 1.1199, σ 42, n = 0.36.
Hence, the total normalized output noise variances = 4.459 + 1.1199 + 0.365 + 1 = 6.9389
12.18 The noise model is shown on the next page. The noise transfer function from e1 [ n] to the
1 − z −2
d z + (1 + d1d 2 )
. Its
= 1− 1
z 2 + d1 z + d1d 2
1 + d1
+ d1d 2
+ d1 z + d1d 2
corresponding output noise variance is given by
output is G1 ( z ) =
z −1
z−2
=
z2 − 1
z2
Not for sale
449
_
z 1
_
z 1
+
x[n]
+
y[n]
_1
+
+
+
d1
e 2[n]
e1[n]
σ12, n = 1 +
+
d2
[ d12 + (1 + d1d 2 ) 2 ](1 − d12 d 22 ) − 2[ d1 (1 + d1d 2 )(1 − d1d 2 )d 1]
(1 − d12 d 22 ) 2
+ 2d13 d 2
− (1 + d12 d 22 )d12
=
2
.
1 − d1d 2
The noise transfer function from e 2 [ n] to the output is
d12 z + (1 + d1d 2 )d1
d1 (1 − z − 2 )
G1 ( z ) =
= d1 −
. Its corresponding
z 2 + d1 z + d1d 2
1 + d1 z −1 + d1d 2 z − 2
normalized output noise variance is given by
2d12
σ 22, n = d12 σ12, n =
.
1 − d 1d 2
Total output noise variance is therefore
σ o2, n
=
σ12, n
+ σ 22, n
=
2(1 + d12 )
1 − d1d 2
.
12.19 (a) Quantization of products before addition
The noise model of the second-order coupled form structure is shown below;
E1(z)
V(z)
α
_
z 1
Y(z)
γ
E2 (z)
δ
E 3(z)
U(z)
E4 (z)
_
z 1
β
We observe from discussion on Page 675 that α = δ = r cos θ , β = − γ = sin θ and hence,
α + δ = 2r cos θ , α δ − β γ = r 2 .
Analysis yields U ( z) = βz −1Y ( z ) + αV ( z) + E 3 ( z), V ( z) = z −1U ( z ), and
Y ( z ) = γV ( z ) + δz −1Y ( z ) + E1 ( z ). Eliminating the variables U(z) and V(z) from these equations
1 − (α + δ ) z −1 + (α δ − β γ ) z −2
Y ( z) =
γz −1
E 3 ( z) + E1 ( z ). Hence, the noise
1 − αz − 1
1 − αz − 1
transfer function from the noise sources e1[ n] and e2 [ n] to the output is given by
we arrive at
Not for sale
450
G1 ( z) =
Y ( z)
1 − αz − 1
z 2 − αz
=
=
E1 ( z ) E ( z ) = E ( z ) = 0 1 − (α + δ )z −1 + (α δ − β γ)z − 2 z 2 − (α + δ )z + (α δ − β γ)
3
4
δz − ( α δ − β γ )
= 1+
r cos(θ )z − r 2
= 1+
, and the noise transfer function from
z 2 − (α + δ ) z + (α δ − β γ )
z 2 − 2r cos(θ )z + r 2
the noise sources e3 [ n] and e4 [ n] to the output is given by
Y (z)
γ z −1
=
=
E 3 ( z ) E ( z ) = E ( z ) = 0 1 − ( α + δ ) z − 1 + (α δ − β γ ) z − 2
1
2
− r sin(θ )z
=
.
z 2 − 2r cos(θ )z + r 2
The output roundoff noise variance due each of the noise sources
G3 ( z ) =
σ12, n = 1 +
= 1+
γz
z2
− (α + δ ) z + (α δ − β γ )
e1[ n] and e2 [ n] is
(r 2 cos θ + r 4 )(1 − r 4 ) − 2(−r 3 cos θ + r 3 cos θ ⋅ r 2 )(−2r cos θ )
(1 − r 4 ) 2 + 2r 2 (4r 2 cos 2 θ ) − (1 + r 4 )(4r 2 cos 2 θ )
r 2 (1 + r 2 )(r 2 + cos 2 θ ) − 4r 4 cos 2 θ
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
, and the output roundoff noise variance due each of
the noise sources e3 [ n] and e4 [ n] is σ 32, n =
r 2 (1 + r 2 ) sin 2 θ
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
. Hence, the total
roundoff noise variance at the output is σ n2 = 2(σ12, n + σ 22, n )
⎛
⎞
r 2 (1 + r 2 )(r 2 + cos 2 θ ) − 4r 4 cos 2 θ
r 2 (1 + r 2 ) sin 2 θ
⎟.
= 2⎜⎜ 1 +
+
2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ] ⎟
−
r
−
r
(
1
(
1
⎝
⎠
Quantization of products after addition
Here, the total roundoff noise variance at the output is σ n2 = σ12, n + σ 22, n
r 2 (1 + r 2 )(r 2 + cos 2 θ ) − 4r 4 cos 2 θ
r 2 (1 + r 2 ) sin 2 θ
= 1+
+
.
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
(b) From the solution of Problem 12.4 we observe that the transfer function of the modified
c2d
, where c = r sin θ and d = cot θ.
coupled-form structure is H ( z) =
z 2 − 2c z + c 2 (1 + d 2 )
The noise model is shown on top of the next page. Analysis yields
Y ( z) =
E 4 ( z ) + cz −1 E 2 ( z) + cz −1 E 3 ( z) − cdz −1 E 4 ( z) + c 2 z −2 E1 ( z ) − c 2 dz −2 E 3 ( z)
1 − 2cdz −1 + c 2 (1 + d 2 )z − 2
.
The noise transfer function from e1[ n] to the output is
Not for sale
451
E 2(z)
c
_
z 1
E 4(z)
c
_
z 1
d
Y(z)
d
E 1(z)
E 3(z)
_1
G1 ( z) =
Y ( z)
c 2 z −2
r 2 sin 2 θ
.
=
=
E1 ( z ) E ( z ) = E ( z ) = E ( z ) = 0 1 − 2cdz −1 + c 2 (1 + d 2 )z − 2 z 2 − 2r cos θ ⋅ z + r 2
2
3
4
The normalized output roundoff noise variance due to e1[ n] is thus
σ12, n =
(r 4 sin 4 θ )(1 − r 4 )
(1 − r 4 ) 2 + 8r 4 cos 2 θ − (1 + 4r 2 cos 2 θ )r 4
.
The noise transfer function from e2 [ n] to the output is
(r sin θ )z
Y ( z)
cz −1
G2 ( z ) =
.
=
=
−
1
2
2
−
2
2
E 2 ( z ) E ( z ) = E ( z ) = E ( z ) = 0 1 − 2cdz + c (1 + d )z
z − 2r cos θ ⋅ z + r 2
1
3
4
The normalized output roundoff noise variance due to e2 [ n] is thus
(r 2 sin 2 θ )(1 − r 4 )
σ 22, n =
.
(1 − r 4 ) 2 + 8r 4 cos 2 θ − (1 + 4r 2 cos 2 θ )r 4
The noise transfer function from e3 [ n] to the output is
(r sin θ )z − r 2 sin 2 θ ⋅ cot θ
Y ( z)
cz −1 − c 2 dz −2
.
=
=
E 3 ( z) E ( z ) = E ( z ) = E ( z ) = 0 1 − 2cdz −1 + c 2 (1 + d 2 )z − 2
z 2 − 2r cos θ ⋅ z + r 2
1
2
4
The corresponding normalized output roundoff noise variance is thus
(r 2 sin 2 θ − r 4 sin 4 θ cot 2 θ )(1 − r 4 ) − 4(r 3 sin 3 θ cot θ )(1 − r 2 )r cos θ
.
σ 32, n =
(1 − r 4 ) 2 + 8r 4 cos 2 θ − (1 + 4r 2 cos 2 θ )r 4
The noise transfer function from e4 [ n] to the output is
G3 ( z ) =
G4 (z) =
= 1+
Y ( z)
1 − cdz −1
z 2 − (r cos θ )z
=
=
E 4 ( z) E ( z ) = E ( z ) = E ( z ) = 0 1 − 2cdz −1 + c 2 (1 + d 2 )z − 2 z 2 − 2r cos θ ⋅ z + r 2
1
2
3
(r cos θ )z − r 2
. The corresponding normalized output roundoff noise variance is
z 2 − 2r cos θ ⋅ z + r 2
(r 2 cos 2 θ − r 4 )(1 − r 4 ) + 4(r 3 cos θ )(1 − r 2 )r cos θ
.
thus σ 42, n = 1 +
(1 − r 4 ) 2 + 8r 4 cos 2 θ − (1 + 4r 2 cos 2 θ )r 4
Not for sale
452
12.20 The noise model of the Kingsbury structure is shown below:
E 1(z)
U(z)
k1
E 3(z)
E 2(z)
_k
V(z)
1
1
z–
1
z–
Y(z)
k2
Analysis yields U ( z) = k1Y ( z) + E1 ( z), V ( z ) =
1
U ( z) + k 2Y ( z ) + E 2 ( z), and
1 − z −1
k z −1
z −1
z −1
Y ( z) = [ − k1V ( z) + E 3 ( z )]
V ( z) +
E 3 ( z ). Eliminating U (z ) and V (z )
=− 1
1 − z −1
1 − z −1
1 − z −1
from these equations we arrive at
1 − [2 − k1 (k1 + k 2 )]z −1 + (1 − k1k 2 )z −2
k z −1
k z −1
z −1
Y ( z) = − 1
E1 ( z) − 1
E 2 (z) +
E 3 ( z).
(1 − z −1 ) 2
(1 − z −1 ) 2
1 − z −1
1 − z −1
Hence, the noise transfer function from e1[ n] to the output is
− k 1 z −1
− k1 z
Y ( z)
.
=
=
E1 ( z ) E ( z ) = E ( z ) = 0 1 − [2 − k1 (k1 + k 2 )]z −1 + (1 − k1k 2 )z − 2 z 2 − (2r cos θ )z + r 2
2
3
The corresponding normalized output roundoff noise variance is thus given by
k12 (1 − r 4 )
k12 (1 − r 2 )(1 + r 2 )
=
σ12, n =
(1 − r 4 ) 2 + 2r 2 (−2r cos θ ) 2 − (1 + r 4 )(−2r cos θ ) 2 (1 − r 2 ) 2 (1 + r 2 ) 2 − 4r 2 cos 2 θ (1 − r 2 ) 2
G1 ( z) =
=
k12 (1 + r 2 )
.
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
The noise transfer function from e2 [ n] to the output is
− k 1z −1 (1 − z −1 )
− k1 z + k1
Y ( z)
.
=
=
E 2 ( z ) E ( z ) = E ( z ) = 0 1 − [2 − k1 (k1 + k 2 )]z −1 + (1 − k1k 2 )z − 2 z 2 − (2r cos θ )z + r 2
1
3
Its corresponding normalized output roundoff noise variance is thus given by
2 k12 (1 + r 2 )
σ 22, n =
.
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
Finally, the noise transfer function from e3 [ n] to the output is
G2 ( z ) =
Y (z)
z −1 (1 − z −1 )
z −1
.
=
=
−
1
−
2
2
E 3 ( z) E ( z ) = E ( z ) = 0 1 − [2 − k1 (k1 + k 2 )]z + (1 − k1k 2 )z
z − (2r cos θ )z + r 2
1
2
Its corresponding normalized output roundoff noise variance is thus given by
2(1 + r 2 )
. Hence, the total normalized noise variance due to
σ 22, n =
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
G3 ( z ) =
Not for sale
453
product roundoff before (after) summation is given by
(3k12 + 2)(1 + r 2 )
σ o2, n = σ12, n + σ 22, n + σ 32, n =
.
(1 − r 2 )[(1 + r 2 ) 2 − 4r 2 cos 2 θ ]
12.21 Let e[n] be a noise source due to product roundoff inside G (z ) with an associated noise
transfer function Ge (z ) to the output of G (z ) . Then the normalized noise power at the output
of the cascade structure due to e[n] is given by
1
1
σ e2, n =
Ge ( z)A2 ( z)Ge ( z −1 ) A2 ( z −1 )z −1dz =
Ge ( z)Ge ( z −1 )z −1dz since
2πj
2πj
∫
∫
C
C
−
1
A 2 ( z ) A 2 ( z ) = 1. Assuming G (z ) is realized with the lowest product roundoff noise power
σ g2,n , the normalized noise power at the output of the cascade due to product roundoff in G (z )
is still σ g2,n . From the solution of Problem 12.14, we note that the lowest roundoff noise power
(assuming quantization before addition) is σ g2, n = 4.4031 for cascade structure #3. Next, from
the solution of Problem 12.18, we note that the normalized output noise power due to noise
2d12
sources in A2 ( z) is σ 22, n =
. Substituting d1 = 0.2 and d1d 2 = −0.5, we get
1 − d1d 2
σ 22, n = 0.0533 . Hence, the total output noise variance of the cascade is given by σ g2, n + σ 22, n
= 4.4031 + 0.0533 = 4.4564.
12.21 The noise model for the structure is as shown below:
x[n]
y[n]
_1
z
_ 0.3
e 1[n]
_
z 1
0.4
e 2[n]
The noise transfer function from e1[ n] to the output is G1 ( z) =
1
(1 + 0.3z −1 )(1 − 0.4 z −1 )
0.2286 − 0.1286
. Thus, the normalized noise power at the output due to e1[ n] is
+
z − 0.4
z + 0.3
(0.2286) 2 (−0.1286) 2 2 × 0.2286 × (−0.1286)
σ12 = 1 +
+
+
=1.0279.
1 − (−0.3)(0.4)
1 − (0.4) 2 1 − (−0.3) 2
0.4
1
.
= 1+
The noise transfer function from e2 [ n] to the output is G2 ( z) =
−
1
z − 0.4
1 − 0.4 z
(0.4) 2
= 1.1905.
Thus, the normalized noise power at the output due to e2 [ n] is σ 22 = 1 +
1 − (0.4) 2
Therefore, the total normalized noise power at the output = 1.0279 + 1.1905 = 2.2184.
= 1+
Not for sale
454
For a 9-bit signed two’s-complement number representation, the quantization level is
δ = 2 −8 = 0.0039062. Hence, the total output noise power due to product roundoff is
δ2
σ o2 = (2.2184 )
= 2.8208 × 10 −6.
12
12.22 The unscaled structure is shown below:
F1 (z)
y[n]
x[n]
_
z 1
_ 0.4
Now, F1 ( z) =
1
1 + 0.4 z −1
1.1905. Next, H ( z) =
= 1+
0.5
(−0.4) 2
− 0.4
2
=
. Using Table 12.4 we obtain F1 2 = 1 +
z + 0.4
1 − (−0.4) 2
1 + 0.5z −1
1 − 0.4 z −1
= 1+
0.9
. Using Table 12.4 we obtain
z − 0.4
(0.9) 2
2
H 2 = 1+
= 1.9643. From Eq. (12.128a), F1 2 = α1 = 1.0911, and from Eq.
1 − (−0.4) 2
(12.128b), H 2 = α 2 = 1.0415.
The scaled structure is shown below, where b01 = β1 and b11 = 0.5 β1 . From Eq. (12.129)
1
and (12.132a), K = β 0 K = β 0 =
= 0.9165 and from Eq. (12.132b),
α1
α
1.0911
β1 = 1 =
= 0.7785. Therefore, b01 = β1 = 0.7785 and b11 = 0.5 β1 = 0.3893.
α 2 1.0415
_
b01
_
K
x[n]
_ 0.4
y[n]
_
z 1
_
b11
12.24 The unscaled structure is shown below:
F1 (z)
y[n]
x[n]
_ 0.4
z–1
z–1
0.7
Not for sale
0.8
_ 0.6
455
1
Now, F1 ( z) =
z2
=
= 1+
− 0.45
0.05
. Using Table
+
z + 0.6 z − 0.2
1 + 0.4 z −1 − 0.12 z − 2 z 2 + 0.4 z − 0.12
(−0.45) 2
(0.05) 2
2 × (−0.45) × 0.05
2
= 1.2788. Next,
+
+
12.4 we get F1 2 = 1 +
1 − (−0.6) × 0.2
1 − (−0.6) 2 1 − (0.2) 2
H (z) =
1 + 0.8z −1 − 0.6 z −2
1 + 0.4 z −1
− 0.12 z − 2
− 0.5
0.9
. Using Table 12.4 we get
+
z + 0.6 z − 0.2
= 1+
(0.9) 2
(−0.5) 2
2 × 0.9 × (−0.5)
2
H 2 = 1+
+
+
= 1.7225.
2
2
1 − (−0.6) × 0.2
1 − (−0.6)
1 − (0.2)
From Eq. (12.128a) we get F1 2 = α1 = 1.1308 and from Eq. (12.28b) we get
1
H 2 = α 2 = 1.3124. Hence, from Eq. (12.132a) we have β 0 =
= 0.8843 and from Eq.
α1
α
(12.132b) we have β1 = 1 = 0.8616. The scaled structure is as shown below, where
α2
K = β 0 K = β0 = 0.8843, b 01 = 1 × β1 = 0.8616, b 11 = 0.8 × β1 = 0.6893, and
b 21 = (−0.6) × β1 = −0.5170.
_
b01
_
K
x[n]
_ 0.4
z–1
_
b11
–1
_
b21
z
0.7
12.25 H ( z) = 3 +
− 4 z −1
1 + 0.6 z −1
+
2 z −1
1 − 0.8 z −1
y[n]
. The unscaled structure is shown below:
A=3
F 1(z)
_
z1
x[n]
y[n]
B =_4
_ 0.6
F 2(z)
_1
z
C=2
0.8
Here, F1 ( z) =
− 4 z −1
1 + 0.6 z −1
= 1+
− 4.6
( − 4 .6 ) 2
2
. Using Table 12.4 we get F1 2 = 1 +
z + 0.6
1 − ( − 0 .6 ) 2
Not for sale
456
= 34.0625. Likewise, F2 ( z) =
2 z −1
1 − 0.8z −1
= 1+
2.8
. Using Table 12.4 we get
z − 0.8
(2.8) 2
−4
2
2
F2 2 = 1 +
= 22.7778. Also, H ( z ) = 3 +
. Using Table 12.4 we get
+
z + 0.6 z − 0.8
1 − (0.8) 2
( −4) 2
22
2 × ( −4) × 2
2
H 2 = 32 +
+
+
= 34.3003.
2
2
1 − (−0.6) × 0.8
1 − (−0.6)
1 − (0.8)
Denote γ0 = H 2 = 5.8566, γ1 = F 1 2 = 5.8363, γ2 = F 2 2 = 4.7726.
−4
A
3
B
C
2
Hence, A =
=
= 0.5140, B =
=
= −0.8381, C =
=
= 0.3415,
γ1 5.8363
γ2 4.7726
γ0 5.8566
γ
γ
K1 = 1 = 0.9965, K 2 = 2 = 0.8149.
γ0
γ0
The scaled structure is shown below:
_
A
_
B
_1
x[n]
K1
y[n]
z
_
C
_ 0.6
_1
z
K2
0.8
The noise model is
_
A
_ eB[n]
B
_
z1
x[n]
e [n]
β
_ eC[n]
C
_1
y[n]
eK [n]
1
_ 0.6
z
e γ [n]
e [n]
K1 A
K2
eK [n]
2
0.8
The noise transfer function from the noise sources eB [n] and eβ [n] is given by:
− 0.5979
0.9965z
= 0.9965 +
G1 ( z) =
. Using Table 12.4, we obtain
z + 0.6
z + 0.6
Not for sale
457
σ12 = (0.9965) 2 +
(−0.5979) 2
= 1.5516.
1 − (−0.6) 2
Likewise, the noise transfer function from the noise sources eC [n] and e γ [n] is given by:
0.8149z
1.6519
= 0.8149 +
. Using Table 12.4, we obtain
G2 ( z ) =
z − 0.8
z − 0.8
σ 22 = (0.8149) 2 +
(1.6519) 2
= 1.8446.
1 − (0.8) 2
The noise transfer function from the remaining three noise sources is G3 ( z ) = 1. Hence, the
normalized output noise variance due to these three noise sources is given by σ 32 = 3.
Therefore, the total normalized output noise variance is σ 20 = 2σ12 + 2σ 22 + σ 32 = 9.7924.
12.26 The scaled structure is shown below.
k1
k2
+
+
k3
+
_
z 1
_
z 1
a1
+
b 1k 2
a2
b 2k 3
⎛ 1 + 0 .4 z − 1 ⎞ ⎛ 1 − 0 .3 z − 1 ⎞
⎟⎜
⎟ Here, a1 = −0.2, b1 = 0.4,
(a) Cascade Structure # 1 – H ( z ) = ⎜
⎜ 1 + 0.2 z −1 ⎟⎜ 1 − 0.6 z −1 ⎟.
⎝
⎠⎝
⎠
a 2 = 0.6, b2 = −0.3. The values of the scaling constants are determined below.
1
1
2
. Using Table 12.4 we get F1 2 =
= 1.0417. Hence,
F1 ( z ) =
z + 0.2
1 − (−0.2) 2
γ1 = F1 2 = 1.0206. Likewise,
⎛ 1 + 0 .4 z − 1 ⎞ ⎛
⎞
− 0.25
1.25
z −1
z + 0 .4
⎟⎜
⎟=
=
+
. Using Table 12.4
F2 ( z ) = ⎜⎜
− 1 ⎟⎜ 1 − 0.6 z −1 ⎟ ( z + 0.2)( z − 0.6)
−
z
z
+
0
.
6
0
.
2
+
1
0
.
2
z
⎝
⎠⎝
⎠
2
(1.25)
(−0.25) 2
2 × 1.25 × (−0.2)
2
+
+
= 1.9485. Hence,
we get F2 2 =
1 − (0.6) 2 1 − (−0.2) 2 1 − 0.6 × (−0.2)
z 2 + 0.1z − 0.12
0.375
0.125
γ2 = F2 2 = 1.3959. Next, H ( z ) =
. Using Table 12.4
= 1+
+
2
z − 0.6 z + 0.2
z − 0.4 z − 0.12
(0.375) 2
(0.125) 2
2 × 0.375 × 0.125
2
+
+
= 1.3197. Hence,
we get H 2 = 1 +
2
2
1 − 0.6 × (−0.2)
1 − (0.6)
1 − (−0.2)
γ0 = H 2 = 1.1488.
Not for sale
458
The scaling multipliers are therefore given by k1 =
γ
1
= 0.9798, k 2 = 1 = 0.7311, and
γ1
γ2
γ
k3 = 2 = 1.2151. Therefore, b1 k2 = 0.2925 and b 2 k3 = −0.3645.
γ0
The noise at the output due to the input multiplier k1 and multiplier a1 have a variance
σ12 = γ12 = 1.0417. The noise at the output due to a1 , k2 , and b1k2 have variance σ 22 which is
calculated below. The noise transfer function for these noise sources is
1.2151 − 0.3645z −1 1.2151z − 0.3645
0.3646
G2 ( z ) =
. Using Table 12.4 we get
=
= 1.2151 +
−
1
z − 0.6
z − 0.6
1 − 0.6 z
σ 22 = (1.2151) 2 +
(0.3646) 2
= 1.6841.
1 − (0.6) 2
Hence the total noise power (variance) at the output = 2 × 1.0417 + 3 × 1.6841 + 2 = 9.1357. In
case the quantization is carried out after addition, then the total noise power at the output =
1.0417 + 1.6841 + 1 = 3.7258.
⎛ 1 − 0 .3 z − 1 ⎞ ⎛ 1 + 0 .4 z − 1 ⎞
⎟⎜
⎟. Here, a1 = −0.2, b1 = −0.3,
(b) Cascade Structure # 2 - H ( z ) = ⎜⎜
− 1 ⎟ ⎜ 1 − 0 .6 z − 1 ⎟
+
z
1
0
.
2
⎝
⎠⎝
⎠
a2 = 0.6, b2 = 0.4. The values of the scaling constants are determined below.
1
2
. From Part (a) we have F1 2 = 1.0417 and γ1 = F1 2 = 1.0206. Likewise,
F1 ( z ) =
z + 0.2
⎛ 1 − 0.3z −1 ⎞⎛
⎞
0.375
0.625
z −1
z − 0.3
⎟⎜
⎟=
=
+
. Using Table 12.4
F2 ( z ) = ⎜⎜
⎟
⎜
⎟
−
1
−
1
⎝ 1 + 0.2 z ⎠⎝ 1 − 0.6 z ⎠ ( z + 0.2)( z − 0.6) z − 0.6 z + 0.2
(0.375) 2
(0.625) 2
2 × 0.375 × 0.625
2
+
+
= 1.0452. Hence,
we get F2 2 =
1 − 0.6 × (−0.2)
1 − (0.6) 2 1 − (−0.2) 2
z 2 + 0.1z − 0.12
γ2 = F2 2 = 1.0224. Next, H ( z ) =
and from Part (a) we have
z 2 − 0.4 z − 0.12
2
H 2 = 1.3197. Hence, γ0 = H 2 = 1.1488.
The scaling multipliers are therefore given by k1 =
γ
1
= 0.9798, k 2 = 1 = 0.9982, and
γ1
γ2
γ
k3 = 2 = 0.89. Therefore, b1 k2 = −0.2995 and b 2 k3 = 0.356.
γ0
The noise at the output due to the input multiplier k1 and multiplier a1 have a variance
σ12 = γ12 = 1.0417. The noise at the output due to a1 , k2 , and b1k2 have variance σ 22 which is
calculated below. The noise transfer function for these noise sources is
Not for sale
459
G2 ( z ) =
0.89 + 0.356 z −1
=
0.89z + 0.356
0.89
. Using Table 12.4 we get
= 0.89 +
z − 0.6
z − 0.6
1 − 0.6 z −1
(0.89) 2
σ 22 = (0.89) 2 +
= 2.0298.
1 − (0.6) 2
Hence the total noise power (variance) at the output = 2 × 1.0417 + 3 × 2.0298 + 2 = 10.1728. In
case the quantization is carried out after addition, then the total noise power at the output =
1.0417 + 2.0298 + 1 = 4.0715.
⎛ 1 − 0 .3 z − 1 ⎞ ⎛ 1 + 0 .4 z − 1 ⎞
⎟ Here, a1 = 0.6, b1 = −0.3,
⎟⎜
(c) Cascade Structure # 3 – H ( z ) = ⎜
⎜ 1 − 0.6 z −1 ⎟⎜ 1 + 0.2 z −1 ⎟.
⎠
⎠⎝
⎝
a 2 = −0.2, b2 = 0.4. The values of the scaling constants are determined below.
1
1
2
F1 ( z ) =
. Using Table 12.4 we get F1 2 =
= 1.5625. Hence,
z − 0.6
1 − (0.6) 2
⎛ 1 − 0 .3 z − 1 ⎞ ⎛
⎞
z −1
z − 0 .3
⎟⎜
⎟=
γ1 = F1 2 = 1.25. Likewise, F2 ( z ) = ⎜⎜
. From
⎟
⎜
⎟
−
1
−
1
⎝ 1 − 0.6 z ⎠⎝ 1 + 0.2 z ⎠ ( z − 0.6)( z + 0.2)
z 2 + 0.1z − 0.12
2
Part (b) we have F2 2 = 1.0452 and γ2 = F2 2 = 1.0224 . Next, H ( z ) =
z 2 − 0.4 z − 0.12
2
and from Part (a) we have H 2 = 1.3197. Hence, γ0 = H 2 = 1.1488.
γ
1
= 0.8, k 2 = 1 = 1.2226, and
The scaling multipliers are therefore given by k1 =
γ1
γ2
γ
k3 = 2 = 0.89. Therefore, b1 k2 = −0.3668 and b 2 k3 = 0.356.
γ0
The noise at the output due to the input multiplier k1 and multiplier a1 have a variance
σ12 = γ12 = 1.5625. The noise at the output due to a1 , k2 , and b1k2 have variance σ 22 which is
calculated below. The noise transfer function for these noise sources is
0.89 + 0.356 z −1 0.89z + 0.356
0.178
G2 ( z ) =
. Using Table 12.4 we get
=
= 0.89 +
z + 0.2
z + 0.2
1 + 0.2 z −1
σ 22 = (0.89) 2 +
(0.178) 2
= 0.8251.
1 + (−0.2) 2
Hence the total noise power (variance) at the output = 2 × 1.5625 + 3 × 0.8251 + 2 = 7.6003. In
case the quantization is carried out after addition, then the total noise power at the output =
1.5625 + 0.8251 + 1 = 3.3876.
⎛ 1 + 0 .4 z − 1 ⎞ ⎛ 1 − 0 .3 z − 1 ⎞
⎟ Here, a1 = 0.6, b1 = 0.4,
⎟⎜
(d) Cascade Structure # 4 – H ( z ) = ⎜
⎜ 1 − 0.6 z −1 ⎟⎜ 1 + 0.2 z −1 ⎟.
⎠
⎠⎝
⎝
a 2 = −0.2, b2 = −0.3. The values of the scaling constants are determined below.
Not for sale
460
1
2
. From Part (c) we have F1 2 = 1.5625 and γ1 = F1 2 = 1.25. Likewise,
z − 0.6
⎞
⎛ 1 + 0 .4 z − 1 ⎞ ⎛
z −1
z + 0 .4
2
⎟=
⎟⎜
. From Part (a) we have F2 2 = 1.9485
F2 ( z ) = ⎜⎜
⎟
⎜
⎟
−
1
−
1
⎝ 1 − 0.6 z ⎠⎝ 1 + 0.2 z ⎠ ( z − 0.6)( z + 0.2)
z 2 + 0.1z − 0.12
and from Part (a) we have
and γ2 = F2 2 = 1.3959. Next, H ( z ) =
z 2 − 0.4 z − 0.12
F1 ( z ) =
2
H 2 = 1.3197 and γ0 = H 2 = 1.1488.
The scaling multipliers are therefore given by k1 =
γ
1
= 0.8, k 2 = 1 = 0.8955, and
γ1
γ2
γ
k3 = 2 = 1.2151. Therefore, b1 k2 = 0.3582 and b 2 k3 = −0.3645.
γ0
The noise at the output due to the input multiplier k1 and multiplier a1 have a variance
σ12 = γ12 = 1.5625. The noise at the output due to a1 , k2 , and b1k2 have variance σ 22 which is
calculated below. The noise transfer function for these noise sources is
− 0.6075
1.2151 − 0.3645z −1 1.2151z − 0.3645
G2 ( z ) =
. Using Table 12.4 we
=
= 1.2151 +
−
1
z + 0.2
z + 0.2
1 + 0.2 z
get σ 22 = (0.89) 2 +
(−0.6075) 2
= 1.8609.
1 + (−0.2) 2
Hence the total noise power (variance) at the output = 2 × 1.5625 + 3 × 1.8609 + 2 = 10.7077. In
case the quantization is carried out after addition, then the total noise power at the output =
1.5625 + 1.8609 + 1 = 5.4234.
12.27 (a) Parallel Form #1 - H ( z) =
( z + 0.4)( z − 0.3)
0.625
0.6
. The unscaled
= 1+
+
−
1
( z + 0.2)( z − 0.6)
1 − 0.6 z
1 + 0.2 z −1
structure is shown below:
F1 (z)
+
+
x[n]
y[n]
_
z 1
0.625
0.6
F2 (z)
+
0.6
_
z 1
_ 0.2
Here the scaling transfer function F1 ( z ) for the middle branch is given by F1 ( z ) =
Not for sale
0.625z
z − 0.6
461
(0.375) 2
0.375
2
= 0.6104. Hence,
. From Table 12.4 we get F1 2 = (0.625) 2 +
z − 0.6
1 − (0.6) 2
γ1 = F 1 2 = 0.7813. Similarly the scaling transfer function F2 ( z) for the bottom branch is
− 0.12
0.6 z
= 0.6 +
. From Table 12.4 we get
given by F2 ( z) =
z + 0.2
z + 0.2
= 0.625 +
(−0.12) 2
2
F2 2 = (0.6) 2 +
= 0.375. Hence, γ2 = F 2 2 = 0.6124.
1 − (−0.2) 2
0.375
0.125
+
. From Table 12.4 we get
Finally, H ( z) = 1 +
z − 0.6 z + 0.2
(0.375) 2
(0.125) 2
2 × 0.375 × 0.125
2
H 2 = 1+
+
+
= 1.3197. Hence, γ 0 = H 2 = 1.1488.
2
2
1 − 0.6 × (−0.2)
1 − (0.6)
1 − (−0.2)
The scaled structure with noise sources is shown below where
e [n]
- C
C
+
G 1(z)
A
x[n]
+
+
_
z 1
eA[n]
ea [n]
1
B
+
ea [n]
2
G2 (z)
+
_
z 1
_
+
+
+
y[n]
e k [n]
1
0.6
+
eB[n]
k1
k2
+
e k [n]
2
0.2
γ
γ
0.625
0.6
1
= 0.7999, B =
= 0.9798, C = , k1 = 1 = 0.6801, k 2 = 2 = 0.5331.
γ1
γ2
γ0
γ0
γ0
The noise transfer function from each of the noise sources eC [ n], ek1 [ n], and ek 2 [ n] is
A=
G 3 ( z ) = 1. The corresponding output noise variance is σ 32 = 1.
The noise transfer function from each of the noise sources e A [n] and ea1 [ n] is
k1
0.4081
0.6801z
G1 ( z ) =
=
= 0.6801 +
. From Table 12.4 we get
z − 0 .6
z − 0 .6
1 − 0 .6 z − 1
σ12 = (0.6081) 2 +
(0.4081) 2
= 0.7227.
1 − (0.6) 2
Likewise, the noise transfer function from each of the noise sources e B [n] and ea 2 [ n] is
Not for sale
462
G2 ( z ) =
k2
1 + 0 .2 z − 1
σ 22 = (0.5331) 2 +
=
− 0.1066
0.5331z
. From Table 12.4 we get
= 0.53301 +
z + 0 .2
z + 0 .2
(−0.1066) 2
1 − (−0.2) 2
= 0.296.
Hence the total noise power (variance) at the output, σ o2 = 2σ12 + 2σ 22 + 3σ 32 = 5.0374 . In case
the quantization is carried out after addition, then the total noise power at the output,
σ o2 = σ12 + σ 22 + σ 32 = 2.0187.
(b) Parallel Form #2 - H ( z ) = 1 +
0.375
0.125
0.375z −1
0.125z −1
.
+
= 1+
+
z − 0.6 z + 0.2
1 − 0.6 z −1 1 + 0.2 z −1
The unscaled structure is shown below:
F 1(z)
_
z 1
+
x[n]
+
y[n]
0.375
0.6
F 2(z)
0.1
_
z 1
+
_
0.2
Here the scaling transfer function F1 ( z ) for the middle branch is given by F1 ( z ) =
0.375
.
z − 0.6
(0.375) 2
2
= 0.2197. Hence, γ1 = F 1 2 = 0.4687. Similarly
From Table 12.4 we get F1 2 =
1 − (0.6) 2
0.125
. From
the scaling transfer function F2 ( z) for the bottom branch is given by F2 ( z) =
z + 0.2
(0.125) 2
2
= 0.0163. Hence, γ2 = F 2 2 = 0.1277.
Table 12.4 we get F2 2 =
1 − (−0.2) 2
0.375
0.125
2
+
. From Part (a) we get H 2 = 1.3197 and
Finally, H ( z) = 1 +
z − 0.6 z + 0.2
γ 0 = H 2 = 1.1488.
The scaled structure with noise sources is shown on the next page where
Not for sale
463
γ
γ
0.375
0.125
1
= 0.7999, B =
= 0.9796, C =
= 0.8705, k1 = 1 = 0.4081, k 2 = 2 = 0.1111.
γ1
γ2
γ0
γ0
γ0
The noise transfer function from each of the noise sources eC [ n], ek1 [ n], and ek 2 [ n] is
A=
G 3 ( z ) = 1. The corresponding output noise variance is σ 32 = 1.
e [n]
- C
C
+
G 1(z)
A
x[n]
+
_1
+
z
+
2
+
y[n]
1
0.6
+
_1
z
+
G2 (z)
k2
+
e k [n]
eB[n]
ea [n]
+
e k [n]
eA[n]
ea [n]
1
B
k1
_
+
2
0.2
The noise transfer function from each of the noise sources e A [n] and ea1 [ n] is
k1 z −1
=
k 2 z −1
=
(0.4081) 2
0.4081
= 0.2602.
. From Table 12.4 we get σ12 =
1 − (0.6) 2
1 − 0.6 z −1 z − 0.6
Likewise, the noise transfer function from each of the noise sources e B [n] and ea 2 [ n] is
G1 ( z) =
G2 ( z ) =
1 + 0.2 z −1
(0.1111) 2
0.1111 0.1111
= 0.0129.
. From Table 12.4 we get σ 22 =
=
z + 0.2 z + 0.2
1 − (−0.2) 2
Hence the total noise power (variance) at the output, σ o2 = 2σ12 + 2σ 22 + 3σ 32 = 3.5462. In case
the quantization is carried out after addition, then the total noise power at the output,
σ o2 = σ12 + σ 22 + σ 32 = 1.2731.
In either case, Parallel form II structure (after scaling) has the lowest roundoff noise variance.
2 − 0 .4 z − 1 − 0 .6 z − 2
⎛ z 2 − 0 .2 z − 0 .3 ⎞
⎟.
= 2⎜⎜
⎟
2
1 + 0.2 z −1 − 0.15z − 2
⎝ z + 0.2 z − 0.15 ⎠
(a) Direct Form: The unscaled structure is shown on top of next page.
2
2z 2
− 0.625 0.225
. From Table 12.4 we
=
=2+
+
F1 ( z) =
z + 0.5 z − 0.3
1 + 0.2 z −1 − 0.15z − 2 z 2 + 0.2 z − 0.15
12.28 H ( z ) =
(−0.625) 2
(0.225) 2 2 × (−0.625) × 0.225
2
+
+
= 4.3319. Hence,
get F1 2 = 2 2 +
1 − (−0.5) × 0.3
1 − (−0.5) 2 1 − (0.3) 2
β0 =
2 z 2 − 0.4 z − 0.6
− 0.125 − 0.675
1
. From Table
= 2+
+
= 0.4805. Next, H ( z) =
2
z + 0.5 z − 0.3
F1 2
z + 0.2 z − 0.15
Not for sale
464
F 1(z)
2
x[n]
y[n]
z
_ 0.2
z
–1
_ 0.2
–1
_ 0.3
0.15
(−0.125) 2 (−0.675) 2 2 × (−0.125) × (−0.675)
2
+
+
= 4.6683. Hence,
12.4 we get H 2 = 2 2 +
1 − (−0.5) × 0.3
1 − (−0.5) 2 1 − (0.3) 2
F1 2
β1 =
= 0.9632.
H2
The scaling multipliers are therefore K = β 0 K = 0.4805 × 2 = 0.961, b01 = β1 = 0.9632,
b11 = −0.2 × β1 = −0.1926, b21 = −0.3 × β1 = −0.289.
The scaled structure with the noise sources is shown below:
G 1(z)
G4 (z)
0.9632
2
y[n]
x[n]
e 1[n]
_ 0.2
e 2[n]
0.15
–1
e 4[n]
_ 0.1926
–1
e 5[n]
_ 0.289
z
z
e 6[n]
e 3[n]
Quantization before addition: The noise transfer function associated with the noise sources
b z 2 + b11 z + b21 0.9632 z 2 − 0.1926 z − 0.289
e1[ n], e2 [ n], and e3 [ n] is given by G1 ( z ) = 01
=
z 2 + 0.2 z − 0.15
z 2 + 0.2 z − 0.15
− 0.0601 − 0.3251
= 0.9632 +
+
. From Table 12.4 we get
z + 0.5
z − 0.3
σ12 = (0.9632) 2 +
(−0.0601) 2
+
(−0.3251) 2
+
2 × (−0.0601) × (−0.3251)
= 1.0827. The noise
1 − (−0.5) × 0.3
1 − (−0.5) 2
1 − (0.3) 2
transfer function associated with the noise sources e4 [ n], e5 [ n], and e6 [ n] is given by
G 4 ( z) = 1. Hence, σ 42 = 1. Hence, total normalized output noise power is
σ o2 = 3σ12 + 3σ 42 = 3 × 1.0827 + 3 = 6.2481.
Not for sale
465
Quantization after addition: Here, total normalized output noise power is
σ o2 = σ12 + σ 42 = 1.0827 + 1 = 2.0827.
⎛ 1 − 0.6568 z −1 ⎞⎛ 1 + 0.4568 z −1 ⎞
⎟
⎟⎜
(b) Cascade Structure #1 - H ( z ) = 2⎜
⎜ 1 − 0.3z −1 ⎟⎜ 1 + 0.5z −1 ⎟.
⎠
⎠⎝
⎝
The unscaled structure is shown below.
F 2(z)
2
x[n]
F 1(z)
y[n]
_
z 1
_
0.3
F1 ( z) =
2
1 − 0.3z −1
=
0.6568
_
z 1
_ 0.5
0.4568
2z
0.6
. From Table 12.4 we get
= 2+
z − 0.3
z − 0.3
(0.6) 2
1
2
F1 2 = 2 2 +
= 4.3956. Hence, β0 =
= 0.477.
F1 2
1 − (0.3) 2
2(1 − 0.6568z −1 )
− 1.446 − 0.2676
F2 ( z) =
. From Table 12.4 we get
=2+
+
z + 0.5
z − 0.3
(1 − 0.3z −1 )(1 + 0.5z −1 )
σ 22 = 2 2 +
β1 =
(−1.446) 2
1 − (−0.5) 2
+
(−0.2676) 2
1 − (0.3) 2
+
2 × (−1.446) × (−0.2676)
= 7.5395. Hence,
1 − (−0.5) × 0.3
F1 2
2 − 0.4 z −1 − 0.6 z −2
2
= 0.1737. Next, H ( z ) =
. From Part (a), H 2 = 4.6683.
F2 2
1 + 0.2 z −1 − 0.15z − 2
Hence, β1 =
F2 2
= 1.2708.
H2
The scaling multipliers are therefore K = β 0 K = 0.477 × 2 = 0.954, b01 = β1 = 0.1737,
b11 = −0.6568 × β1 = −0.1141, b02 = β 2 = 1.2708, b12 = 0.4568 × β2 = 0.5805.
The scaled structure with the noise sources is shown below:
0.954
1.2708
0.1737
_
z 1
e 1[n]
0.3
e 2[n]
e 3[n]
_
0.1141
e 4[n] e5 [n]
Not for sale
_ 0.5
_
z 1
e 6[n]
0.5805
e 7[n]
466
Quantization before addition - The noise transfer function associated with the noise sources
e1[ n] and e2 [ n] is
⎛ 0.1737 − 0.1141z −1 ⎞⎛ 1.2708 + 0.5805 z −1 ⎞
− 0.0138 − 0.0745
⎟ = 0.2207 +
⎟⎜
. From
+
G1 ( z ) = ⎜⎜
⎟
⎟⎜
−1
−1
z
+
z
−
0
.
5
0
.
3
1
0
.
3
z
1
0
.
5
z
+
−
⎠
⎠⎝
⎝
Table 12.4 we get
(−0.0138) 2 (−0.0745) 2 2 × (−0.0138) × (−0.0745)
σ12 = (0.2207) 2 +
+
+
= 0.0569.
1 − (−0.5) × 0.3
1 − (−0.5) 2
1 − (0.3) 2
The noise transfer function associated with the noise sources e3 [ n], e4 [ n], and e5 [ n] is
G3 ( z ) =
1.2708 + 0.5805z −1
= 1.2708 +
1 + 0.5z −1
σ 32 = (1.2708) 2 +
(−0.0549) 2
1 − (−0.5) 2
− 0.0549
. From Table 12.4 we get
z + 0.5
= 1.619. The noise transfer function associated with the noise
sources e6 [ n] and e7 [ n] is given by G6 ( z ) = 1. Hence, σ 62 = 1. Hence, total normalized
output noise power is σ o2 = 2σ12 + 3σ 32 + 2σ 62 = 2 × 0.0569 + 3 × 1.619 + 2 = 6.9708.
Quantization after addition
Here, total normalized output noise power is σ o2 = σ12 + σ 32 + σ 62 = 0.0569 + 1.619 + 1 = 2.6759.
⎛ 1 + 0.4568 z −1 ⎞⎛ 1 − 0.6568 z −1 ⎞
⎟.
⎟⎜
(c) Cascade Structure #2 - H ( z ) = 2⎜
⎜ 1 − 0.3 z −1 ⎟⎜ 1 + 0.5 z −1 ⎟
⎠
⎠⎝
⎝
The unscaled structure is shown below:
2
F2 (z)
F1 (z)
_
z 1
0.3
0.4568
_ 0.5
_
z 1 _
0.6568
0.6
(0.6) 2
2
2
= 4.3956.
F1 ( z ) =
=2+
. Using Table 12.4 we get F1 2 = 2 +
z − 0.3
1 − (0.3) 2
1 − 0.3 z −1
1
= 0.477. Likewise,
Hence, β 0 =
F1 2
2
F2 ( z ) =
2(1 + 0.4568 z −1 )
(1 − 0.3 z
−1
)(1 + 0.5 z
−1
)
= 2+
− 0.054 0.5676
+
. Using Table 12.4 we get
z + 0.5 z − 0.3
Not for sale
467
F2 = 2 2 +
(−0.054) 2
1 − ( −0.5) 2
+
(0.5676 ) 2
1 − (0.3) 2
+
2 × (−0.054) × 0.5676
= 4.3046. Hence,
1 − ( −0.5) × 0.3
β2 =
⎛ 1 + 0.4568 z −1 ⎞⎛ 1 − 0.6568 z −1 ⎞
F1 2
⎟
⎟⎜
= 0.482. Finally, H ( z ) = 2⎜
⎜ 1 − 0.3 z −1 ⎟⎜ 1 + 0.5 z −1 ⎟
F2 2
⎠
⎠⎝
⎝
=2+
− 0.1249 − 0.6751
. Using Table 12.4 we get
+
z + 0 .5
z − 0 .3
H 2 = 22 +
β2 =
(−0.1249) 2
1 − (−0.5) 2
+
(−0.6751) 2
1 − (0.3) 2
+
2 × (−0.1249) × (−0.6751)
= 4.6683. Hence,
1 − (−0.5) × 0.3
F2 2
= 0.9603.
H 2
The scaling multipliers are therefore K = β 0 K = 0.477 × 2 = 0.954, b01 = β1 = 0.482,
b11 = −0.6568 × β1 = −0.3166, b02 = β 2 = 0.9603, b12 = 0.4568 × β 2 = 0.4387.
The scaled structure with the noise sources is shown below:
0.954
0.9603
0.482
_
z 1
e 1[n]
0.3
e 3[n]
_
_ 0.5
0.3166
e 2[n]
_
z 1
e 6[n]
0.4387
e 4[n] e5 [n]
e 7[n]
Quantization before addition – The noise transfer function from the noise sources e1 [n] and
e 2 [n] is given by
⎛ 0.482 − 0.3166 z −1 ⎞⎛ 0.9603 + 0.4387 z −1 ⎞
⎟ = 0.4629 + − 0.0289 + − 0.1563 . Using
⎟⎜
G1 ( z ) = ⎜
−1
−1
⎟
⎜
⎟
⎜
z + 0 .5
z − 0 .3
1 − 0.3 z
1 + 0.5 z
⎠
⎠⎝
⎝
Table 12.4 we get σ12 = 0.25. Likewise, the noise transfer function from the noise sources
e 3 [n], e 4 [n], and e 5 [n] is given by G 3 ( z ) =
0.9603 + 0.4387 z −1
1 + 0.5 z −1
= 0.9603 +
− 0.0415
.
z + 0.5
Using Table 12.4 we get σ 22 = 0.9245. Finally, the noise transfer function from the noise
sources e 6 [n] and e 7 [n] is given by G6 ( z ) = 1. Hence, σ 62 = 1.
Therefore, the total normalized output noise power is
σ 2o = 2σ12 + 3σ 32 + 2σ 62 = 2 × 0.25 + 3 × 0.9245 + 2 = 5.2735.
Quantization after addition Here, total normalized output noise power is σ 2o = σ12 + σ 32 + σ 62 = 0.25 + 0.9245 + 1 = 2.1745.
Not for sale
468
0.25
(d) Parallel Form I Realization - H ( z ) = 2 +
1 + 0 .5 z − 1
+
− 2.25
1 − 0 .3 z − 1
.
The unscaled structure is shown below:
2
F 1(z)
+
x[n]
+
0.25
_ 0.5
y[n]
_
z 1
F 2(z)
+
_ 2.25
0.3
F1 ( z ) =
0.25
1 + 0 .5 z
= 0.25 +
−1
_
z 1
− 0.125
. Using Table 12.4 we get
z + 0 .5
( −0.125) 2
1
= 3.4641.
= 0.0833. Hence, β1 =
F1 2
1 − ( −0.5) 2
− 0.675
− 2.25
F2 ( z ) =
= −2.25 +
. Using Table 12.4 we get
z − 0.3
1 − 0 .3 z − 1
2
F1 2 = (0.25) 2 +
( −0.675) 2
1
= 0.424.
= 5.5632. Hence, β 2 =
F2 2
1 − (0.3) 2
− 0.125 − 0.675
H ( z) = 2 +
. Using Table 12.4 we get
+
z + 0 .5 z − 0 .3
2
F1 2 = ( −2.25) 2 +
2
H 2 = 22 +
β0 =
( −0.125) 2
1 − ( −0.5) 2
+
( −0.675) 2
1 − (0.3) 2
+
2 × ( −0.125) × ( −0.675)
= 4.6683. Hence,
1 − ( −0.5) × 0.3
1
= 0.4628.
H 2
The scaled structure with the noise sources is shown on top of the next page. The noise transfer
function associated with the noise sources e1[n] and e2 [n] is given by
1 /β 0 β1
− 0.3119
= 0.6238 +
G1 ( z ) =
. Using Table 12.4 we obtain,
z + 0.5
1 + 0.5 z −1
σ12 = (0.6238) 2 +
( −0.3119) 2
= 0.5188. Likewise, the noise transfer function associated with
1 − ( −0.5) 2
the noise sources e3 [n] and e4 [n] is given by
Not for sale
469
e 5[n]
2β 0
_ 0.125β
x[n]
1
+
G 1(z)
e 2[n]
+
+
+
0.675β 2
1 /β 0 β 2
1 − 0.3 z
−1
σ 32 = (0.9162 ) 2 +
= 0.9162 +
(0.2749) 2
1 − (0.3) 2
1/β 1β 0
_1
z
_ 0.5
y[n]
e 6[n]
+
1/β 2β 0
_1
+
+
G2 (z)
e 3[n]
e 4[n]
G3 ( z ) =
+
+
e 1[n]
_
+
z
0.3
e 7[n]
0.2749
. Using Table 12.4 we obtain,
z − 0.3
= 0.224.
The noise transfer function associated with the remaining three noise sources is G5 ( z ) = 1.
Hence, σ 25 = 1.
Quantization before addition
Hence, total normalized output noise power is σ o2 = 2σ12 + 2σ 32 + 3σ 25 = 5.8824.
Quantization after addition
Here, total normalized output noise power is σ 2o = σ12 + σ 32 + σ 25 = 2.4412.
12.28 (a) The noise model for the allpass structure of Figure P12.9(a) is shown below:
R(z) _
z1
X(z)
_1
V(z)
di
W(z)
E(z)
Y(z)
Analysis yields W ( z ) = E ( z ) + di V ( z), R( z) = X ( z) − W ( z), V ( z) = X ( z) + z −1 R( z), and
Y ( z ) = W ( z ) + z −1 R( z ). To determine the noise transfer function G (z ) we set X ( z ) = 0 in the
Not for sale
470
above equations. This leads to R( z ) = −W ( z ), V ( z ) = z −1 R( z ) = − z −1W ( z ), and hence,
W ( z) = E ( z ) − di z −1W ( z ) or, E ( z) = (1 + di z −1 )W ( z). As a result, Y ( z ) = W ( z ) − z −1W ( z )
= (1 − z −1 )W ( z ). Consequently, the noise transfer function is given by
G( z) =
− (1 + di )
Y ( z)
z −1
1 − z −1
. Using Table 12.4 we get
=
=
= 1+
X ( z ) 1 + d i z −1 z + d i
z + di
σ e2 = 1 +
(1 + di ) 2
1 − di2
=
2
.
1 − di
(b) Let Gi (z ) be the noise transfer function for di , 1 ≤ i ≤ 3. Then,
z −1
z −1
z −1
⋅ A2 ( z ), G 2 ( z ) =
, and G3 ( z ) =
. From the results of Part (a), it
G1 ( z ) =
z + d2
z + d3
z + d1
2
for k = 1, 2, 3.
follows that the noise variances due to d1 ,d2 , and d3 are given by σ k2 =
1 − dk
Hence the total noise power at the output of the digital filter structure of Figure P12.9 is given
2
2
2
by σ o2 =
+
+
.
1 − d1 1 − d 2 1 − d3
2.
12.30 Let the total noise power at the output of G (z ) due to product round-off be given by σ G
Assuming a total of L multipliers in the realization of G (z ) we get
⎛ 1 2π
⎞
2
⎜
j
ω
=
kl ⎜
Gl (e ) dω ⎟⎟, where Gl (z ) denotes the noise transfer function due the
2π
l =1 ⎝
0
⎠
l –th noise source in G (z ). Now if each delay is replaced by two delays, then each of the noise
L
2
σG
∑
∫
transfer function becomes Gl ( z 2 ). Thus, the total noise power at the output due to noise
⎞
⎛ 1 2π
2
sources in
=
is given by
k l ⎜⎜
Gl (e j 2ω ) dω ⎟⎟. Replacing ω by ω̂ / 2 in
2π
l =1 ⎝
0
⎠
L
⎞
⎞ 1 L ⎛ 1 4π
⎛ 1 4π
2
2⎛ 1⎞
⎜
ˆ
ω
2.
j
kl ⎜
Gl (e ) ⎜ ⎟ dωˆ ⎟⎟ =
k l ⎜⎜
Gl (e jωˆ ) dωˆ ⎟⎟ = σ G
the integral we get
π
2
2
π
2
2
⎝ ⎠
l =1 ⎝
l =1 ⎝
0
0
⎠
⎠
L
∑
1
Since,
2π
2π
∫
0
∑
2
σˆ G
G(z 2 )
G (e j 2 ω )
2
∫
∑
∫
A(e jω )
2
1
dω =
2π
2π
∫
∫
2
G (e j 2ω ) dω, the total noise power at the output
0
of the cascade is still equal to σ o2 ;
12.31 For the first factor in the numerator, there are R possible choices of factors. Once this factor
has been chosen, there are R − 1 choices for the next factor and continuing further we get that
the total number of possible ways in which the factors in the numerator can be generated equal
to R( R − 1)( R − 2) L 2 × 1 = R! . Similarly, the total number of ways in which the factors in the
Not for sale
471
denominator can be generated is equal to R! . Since the numerator and the denominator are
factored independent of each other, hence the total number of possible realizations are
N = ( R! )( R! ) = ( R! ) 2 .
12.32 (i) A pole-zero plot of H 1( z) is shown below:
1
1
2
0.5
Imaginary Part
3
0
3
0. 5
2
1
1
1
0. 5
0
Real Part
0.5
1
First we pair the poles closest to the unit circle with their nearest zeros resulting in the secondorder section
z 2 + 1.0094 z + 1
H a (z) =
.
z 2 + 0.6081z + 0.9208
Next, the poles that are closest to the poles of H a (z) are matched with their nearest zeros
resulting in the second-order section
z 2 + 1.2914 z + 1
H b ( z) =
.
z 2 + 0.2749z + 0.6673
Finally, the remaining poles and zeros are matched yielding the second-order section
z 2 + 1.8606 z + 1
H c (z) =
.
z 2 − 0.41591z + 0.2066
For ordering the sections to yield the smallest peak output noise due to product round-off under
an L2 -scaling rule, the sections should be placed from most peaked to least peaked as shown
below.
Ha (z)
Hb (z)
Hc (z)
For ordering the sections to yield the smallest peak output noise power due to product round-off
under an L∞ -scaling rule, the sections should be placed from least peaked to most peaked as
shown below.
Hc (z)
Hb (z)
Not for sale
Ha (z)
472
(ii)
(iii)
A pole-zero plot of H 2 ( z) is shown below:
1
1
2
Imaginary Part
0.5
3
0
3
0. 5
2
1
1
1. 5
1
0. 5
0
Real Part
0.5
1
1.5
Following the same procedure as in Part (i), we get
z 2 − 0.8508z + 1
z 2 − 1.1141z + 1
z 2 − 1.7988z + 1
H a (z) =
, H b (z) =
, H a ( z) =
.
z 2 − 0.6120 z + 0.9208
z 2 − 0.3474 z + 0.7127
z 2 − 0.2993z + 0.20358
For ordering the sections to yield the smallest peak output noise due to product round-off under
an L2 -scaling rule, the sections should be placed from most peaked to least peaked as shown
below.
Ha (z)
Hb (z)
Hc (z)
For ordering the sections to yield the smallest peak output noise power due to product round-off
under an L∞ -scaling rule, the sections should be placed from least peaked to most peaked as
shown below.
Hc (z)
Hb (z)
Ha (z)
σ2
12.33 SNR = x . After scaling, σ x changes to Kσ x where K is as given by Eq. (12.151).
σ o2
Therefore, SNR =
σ 2x (1 − α ) 2
σ 2o
.
1
(i) For uniform density function
σ x2
=
∫
1 2
x dx
2
−1
1
3
= . Thus, SNR =
Not for sale
(1 − α ) 2
3σ o2
. With
473
b = 12, σ o2 =
2 −24
12
= 4.967 × 10 − 9 and α = 0.95. Hence,
⎛ (1 − α ) 2 ⎞
⎟ = 52.24 dB.
SNR dB = 10 log10 ⎜
⎜ 3σ 2 ⎟
o ⎠
⎝
1
(ii) For Gaussian input with σ x2 = , SNR =
9
(1 − α ) 2
. Again with b = 12,
9σ o2
⎛ (1 − α ) 2 ⎞
⎟ = 47.97 dB.
SNR dB = 10 log10 ⎜
⎜ 9σ 2 ⎟
o ⎠
⎝
(iii) For a sinusoidal input of known frequency, i.e., x[ n] = sin(ωo n). In this case, the average
1
power = σ x2 = . Hence, SNR =
2
(1 − α ) 2 σ 2x
σ o2
=
(1 − α ) 2
2σ o2
. Therefore,
⎛ (1 − α ) 2 ⎞
⎟ = 69.91 dB.
SNR dB = 10 log10 ⎜
⎜ 2σ 2 ⎟
o ⎠
⎝
1
12.34 (a) H LP ( z) = [1 + A1 ( z )], where A1 ( z) =
2
H LP
( e jω )
proving
2
− α + z −1
1 − α z −1
. Hence,
2
∂ H LP (e jω )
2(1 + cos ω)
⎛1− α ⎞
. Proving
=⎜
⎟
∂α
⎝ 2 ⎠ 1 − 2α cos ω + α 2
∂ H LP (e jω )
= 0 is equivalent to
ω=0
2
= 0. Now,
∂α
ω=0
∂ H LP (e jω )
2
∂α
Thus,
2
1− α
2(1 + cos ω)
⎛ 1 − α ⎞ 2(1 + cos ω)(α − 2 cos ω)
.
=−
⋅
−⎜
⎟ ⋅
2
2 1 − 2α cos ω + α
1 − 2α cos ω + α 2
⎝ 2 ⎠
∂ H LP (e jω )
2
=
∂α
−2
2
+
= 0.
1− α 1− α
ω=0
1
2
(b) H HP ( z ) = [1 − A1 ( z )], where A1 ( z) =
H HP
( e jω )
2
∂ H HP (e jω )
∂α
− α + z −1
1 − α z −1
. Hence,
2
2(1 − cos ω)
⎛1+ α ⎞
. Now,
=⎜
⎟
⎝ 2 ⎠ 1 − 2α cos ω + α 2
2
2
=−
1+ α
2(1 − cos ω)
⎛ 1 + α ⎞ 2(1 − cos ω)(α − 2 cos ω)
.
⋅
−⎜
⎟ ⋅
2 1 − 2α cos ω + α 2 ⎝ 2 ⎠
1 − 2α cos ω + α 2
Not for sale
474
Thus,
2
∂ H HP (e jω )
=
∂α
−2
2
+
= 0.
1+ α 1+ α
ω=0
1
12.35 (a) H BP ( z ) = [1 − A2 ( z)], where A2 ( z ) =
2
2 ⎛1− α ⎞
real. Hence, H BP (e jω ) = ⎜
⎟
⎝ 2 ⎠
Now,
∂ H BP (e jω )
2
∂α
α + − β (1 + α )z −1 + z −2
1 − β (1 + α ) z −1 + αz − 2
, with α and β being
2⎛
⎞
2(1 − cos ω)
⎜
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟.
⎝
⎠
⎛ − 2 ⎞⎛ 1 − α ⎞
=⎜
⎟⎜
⎟
⎝ 1 − α ⎠⎝ 2 ⎠
⎞
2(1 − cos ω)
⎟
⎜
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟
⎠
⎝
2⎛
2⎛
⎞
2(1 − cos ω)
⎜
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟ ×
⎝
⎠
⎛
2 β 2 (1 + α ) + 2α + 2 cos(2ω) − 4 β (1 + α ) cos ω ⎞⎟
⎜
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟.
⎝
⎠
Using the fact β = cos(ωo ), we get
⎛1− α ⎞
+⎜
⎟
⎝ 2 ⎠
∂ H BP (e jω )
2
=
∂α
−2
−2
(2 β 2 + 2α − 2 − 2αβ 2 )
2
−
=
+
= 0.
2
2
2
2
2
1 − α 1 + α − 2α + 2αβ − β − α β
1− α 1− α
ω = ωo
Similarly,
∂ H BP (e jω )
∂β
2
2⎛
⎞
2(1 − cos ω)
⎜
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟ ×
⎝
⎠
⎛
⎞
2 β (1 + α ) − 2(1 + α ) 2 cos ω
⎜−
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟.
⎝
⎠
⎛1− α ⎞
=⎜
⎟
⎝ 2 ⎠
Again, using the fact β = cos(ωo ), it can be seen that
∂ H BP (e jω )
2
= 0.
∂β
ω = ωo
1
(b) Here, H BS ( z ) = [1 + A2 ( z )], where A2 ( z) is as given in Part (a). Hence,
2
H BS
( e jω )
2
∂ H BS (e jω )
∂α
⎛1+ α ⎞
=⎜
⎟
⎝ 2 ⎠
2
2⎛
⎞
4 β 2 + 2 + 2 cos(2ω) − 8 β cos ω
⎜
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟. Thus,
⎝
⎠
⎞
4 β 2 + 2 + 2 cos(2ω) − 8 β cos ω
⎛ 1 + α ⎞⎛⎜
⎟
=⎜
⎟⎜
⎝ 2 ⎠⎝ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟⎠
Not for sale
475
⎞
4 β 2 + 2 + 2 cos(2ω) − 8 β cos ω
⎜
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟ ×
⎝
⎠
⎛
2(1 + α ) β 2 + 2α + 2 cos(2ω) − 4 β (1 + α ) cos ω ⎞⎟
⎜
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟.
⎝
⎠
Substituting β = cos(ωo ), it can be seen that
⎛1+ α ⎞
−⎜
⎟
⎝ 2 ⎠
∂ H BS (e jω )
2
=
∂α
2⎛
2
⎛1+ α ⎞
−⎜
⎟
1− α ⎝ 2 ⎠
ω=0
∂ H BS (e jω )
Similarly,
2
=
∂α
2⎛
2⎞
⎜ 2(1 + α )( β + 1) ⎟ = 0.
⎜ (1 + α ) 2 ( β + 1) 2 ⎟
⎝
⎠
2
⎛1+ α ⎞
−⎜
⎟
1− α ⎝ 2 ⎠
2⎛
ω=π
Now,
∂ H BS (e jω )
2
⎛1+ α ⎞
=⎜
⎟
⎝ 2 ⎠
∂β
2⎞
⎜ 2(1 + α )( β + 1) ⎟ = 0.
⎜ (1 + α ) 2 ( β + 1) 2 ⎟
⎝
⎠
⎞
8 β − 8 β cos ω
⎟
⎜
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟
⎠
⎝
2⎛
⎛1+ α ⎞
−⎜
⎟
⎝ 2 ⎠
2⎛
⎞
4 β 2 + 2 + 2 cos(2ω) − 8 β cos ω
⎜
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟ ×
⎝
⎠
⎛
⎞
(1 + α ) 2 2( β − cos ω)
⎜
⎟
⎜ 1 + β 2 (1 + α ) 2 + α 2 + 2α cos(2ω) − 2 β (1 + α ) 2 cos ω ⎟.
⎝
⎠
Again, substituting β = cos(ωo ), it can be seen that
∂ H BS (e jω )
2
= 0 and
∂β
ω=0
∂ H BS (e jω )
2
= 0.
∂β
ω =π
12.36 For a BR transfer function G (z ) realized in a parallel allpass form, its power-complementary
2
2
transfer function H (z ) is also BR satisfying the condition G(e jω ) = 1 − H (e jω ) . Let
ω = ωo be a frequency where G(e jω ) is a maximum, i.e., G(e jωo ) = 1. Then, it follows that
H (e jωo ) = 0. From the power- complementary condition it follows that
2 G ( e jω )
⋅
∂ G ( e jω )
∂ω
=
− 2 H ( e jω )
⋅
∂ H ( e jω )
∂ω
. Therefore, at ω = ωo ,
Not for sale
476
2 G(e jω )
⋅
∂ G ( e jω )
∂ω
whether or not
=
− 2 H (e jω )
⋅
∂ H ( e jω )
∂ω
ω = ωo
∂ H (e jω )
∂ω
, and thus,
∂ G ( e jω )
∂ω
ω = ωo
=0
ω =ω o
= 0. Hence, low passband sensitivity of G (z ) does not
ω =ω o
necessarily imply low passband sensitivity of H (z ) .
12.37 Without error feedback – The transfer function of the structure without error feedback is
1
1
=
, where r = 1 − ε. The
given by H ( z ) =
1 + α1 z −1 + α2 z − 2 1 − 2r cos θ z −1 + r 2 z − 2
corresponding impulse response h[n] is given by h[ n] =
r n sin( n + 1)θ
µ[ n]. To keep the
sin θ
output y[n] from overflowing we must insert a multiplier of value
L=
∞
∑ n = 0 h[n] .
1
L
at the input where
From Eq. (12.164) we get
1
16
≤ L2 ≤
.
π 2 (1 − r ) 2 sin 2 θ
(1 − r ) 2 (1 − 2r cos θ + r 2 )
The quantization noise model for H (z ) is as shown below:
(1) :
e[n]
y[n]
x[n]
_
z 1
_α
_α
The output noise power is given by σ n2 = σ e2
1
_
z 1
2
∞
∑
2
h[ n] =
n=0
1+ r2
1− r2
⋅
1
r4
− 2r 2
cos θ + 1
⋅ σ e2 .
The output signal power, assuming an input signal of variance σ 2x is given by
σ 2y =
σ y2 ∞
∑
L2 n = 0
2
h[ n] . Hence, the SNR is given by SNR =
signed representation, σ e2 =
2
σ2
S σy
=
= x . For a (b + 1) -bit
N σ n2 L2 σ e2
σ x2
S
2 −2 b
. Therefore, from the
. Hence, here SNR = =
12
N L2 2 − 2b
Not for sale
477
inequality of Eq. (1) given above, we get
2 −2 b
16 × 2 −2b
N
.
≤ ≤
12σ x2 (1 − r ) 2 (1 − 2r cos θ + r 2 ) S 12σ x2 π 2 (1 − r ) 2 sin 2 θ
1
3
For an WSS uniformly distributed input between [ −1, 1], σ x2 = . Hence,
(a)
2 −2 b
4(1 − r ) 2 (1 − 2r cos θ + r 2 )
≤
N
4
2 −2 b
≤
⋅
.
S π 2 (1 − r ) 2 sin 2 θ
If ε → 0, and θ → 0, then (1 − r ) 2 → ε 2 , cos(2θ ) = 1 − 2 sin 2 θ ≅ 1 − 2θ 2 , and sin 2 θ ≅ θ 2 . In
2 −2 b
this case we have
4ε 2 (ε 2 + 4θ 2 )
N
2 −2 b
≤
.
S π 2 ε 2θ 2
≤
1
3
(b) For an input with a Gaussian distribution between [ −1, 1], σ x = . In this case, we have
3⋅
2 −2 b
4ε 2 (ε 2 + 4θ 2 )
≤
N
3 2 −2 b
≤
⋅
.
S π 2 ε 2θ 2
(c) For a sinusoidal input between [−1, 1] of known frequency ωo , σ 2x =
variance here is therefore σ n2 = σ e2
∞
∑
2
h[ n] =
n=0
1
. The output noise
2
2 − 2b 1 + r 2
1
. Thus,
⋅
⋅
12 1 − r 2 r 4 − 2r 2 cos θ + 1
N 1+ r2
1
2 −2 b
2 −2 b
=
⋅
=
≅
.
S 1 − r 2 6 r 4 − 2r 2 cos(2θ ) + 1 24ε(ε 2 + θ 2 ) 24εθ 2
With error feedback
z 2 − 2z + 1
1 − 2 z − 1 + z −2
2(r cos θ − 1) z + 1 − r 2
G( z) =
=
= 1+
.
z 2 − 2r cos θ z + 1
1 − 2r cos θ z −1 + r 2 z − 2 z 2 − 2r cos θ z + 1
(
Thus, G
2
)
= 1+
(4(1 − r cos θ )2 + (1 − r 2 )2 )(1 − r 4 ) + 8r cos θ ⋅ (1 − r 2 )2 (r cos θ − 1) .
(1 − r 2 ) 2 + 2r 2 (4r 2 cos2 θ ) − 4(1 + r 4 )r 2 cos 2 θ
For r = 1 − ε with ε → 0, and θ → 0, we get after some manipulation
G
2
= 1+
θ4
4ε(ε 2
+ θ2)
2
, and σ n2 = σ e2 G .
Now, remains the same as before since it depends only upon the denominator. Also, the overall
transfer function of the structure remains the same as before. The output noise power with
Not for sale
478
2
error feedback is thus Nˆ = σ e2 G , whereas, the output noise power without error feedback is
N=
σ e2
2
G
Nˆ
H . Hence,
=
.
2
N
H
Now, G
2
2
= 1+
θ4
4 ε (ε 2 + θ 2 )
. Since θ >> ε, G
2
≅
θ4
4εθ 2
θ2
.
4ε
=
1+ r2
1
1 + (1 − ε ) 2
1
⋅
=
⋅
Also, H 2 =
1 − r 2 r 4 − 2r 2 cos 2 θ + 1 1 − (1 − ε ) 2 (1 − ε ) 4 − 2(1 − ε ) 2 (1 − 2θ 2 ) + 1
1
1
≈
≈
.
4ε(θ 2 + ε 2 ) 4εθ 2
Nˆ
N
≅ θ 4 . As a result, with error feedback, the
ratio gets multiplied by θ 4 .
Thus,
N
S
2 −2b θ 2 Nˆ θ 2 2 −2b
(a) input with uniform density:
≤ ≤
⋅
.
S π2 ε2
16 ε 2
2 −2b 3θ 2 Nˆ 3θ 2 2 −2b
(b) wide-sense stationary, Gaussian density, white:
≤ ≤
⋅
.
S
16ε 2
π2
ε2
Nˆ 2 −2 b θ 2
(c) sinusoid with known frequency:
.
=
S
24 ε
12.38 The coupled form with error feedback is shown below:
_
z 1
λ1
γ
_
z 1
α
u[n]
+
e 2[n]
Q
_
_
v1 [n]
e1 [n]
+
y[n]
Q
δ
_
z 1
v 2[n]
β
λ2
_
z 1
Analysis yields V1 ( z ) = λ1 z −1 E1 ( z ) + δz −1Y ( z ) + γz −1U ( z ), E1 ( z) = Y ( z) − V1 ( z),
V2 ( z ) = λ2 z −1 E 2 ( z ) + βz −1Y ( z ) + αz −1U ( z ), and E 2 ( z) = Y ( z) − V2 ( z). Eliminating
U1 ( z), V1 ( z), U 2 ( z), and V2 ( z) from these equations we arrive at the noise transfer functions
G1 ( z ) =
(1 − αz −1 )(1 + λ1 z −1 )
Y ( z)
=
and
E1 ( z) E ( z ) = 0 1 − (α + δ )z −1 + (α δ − β γ)z − 2
2
Not for sale
479
G 2 (z) =
γ z −1 (1 + λ2 z −1 )
Y ( z)
=
. The total output noise power is thus
E 2 ( z ) E ( z ) = 0 1 − (α + δ ) z − 1 + ( α δ − β γ ) z − 2
2
2
2
given by σ o2 = G1 2 σ e21 + G2 2 σ e22 . Hence, the total output noise power, for a lowpass filter
design, can be reduced by placing the zeros of the noise transfer functions in the passband. For
each of the noise transfer functions given above, we can place only a zero at z = 1 by choosing
λi = −1, i = 1, 2.
Using the notations b = −(α + δ ) and d = α δ − β γ, we rewrite the noise transfer functions as
z 2 − (1 + α )z + α
γz − γ
and G2 ( z) =
. Using Table
z 2 + bz + d
z 2 + bz + d
z 2 + bz + d
[(1 + α + b) 2 + (α − d ) 2 ](1 − d 2 ) + 2(1 + α + b)(α − d )(1 − d )
2
12.4 we obtain G1 2 = 1 +
and
(1 − d 2 ) 2 + 2db 2 − (1 + d 2 )b 2
G1 ( z) =
= 1+
− (1 + α + b)z + (α − d )
2γ 2 (1 − d 2 )
2
G2 2 =
.
(1 − d 2 ) 2 + 2db 2 − (1 + d 2 )b 2
12.39 The Kingsbury structure with error feedback is shown below.
1
z–
1
z–
_
λ1
k1
Q
1
z–
_
λ2
+
v 1[n]
x[n]
1
z–
v 2[n]
u 1[n]
+
Q
_
λ3
u 2[n]
_k
1
v 3[n]
+
Q
u 3[n]
1
z–
y[n]
k2
Analysis yields: V1 ( z ) = k1Y ( z ) + z −1U1 ( z ) + λ1 z −1 E1 ( z ), E1 ( z) = U1 ( z) − V1 ( z),
V2 ( z ) = k 2Y ( z ) + U1 ( z ) + λ2 z −1 E 2 ( z ), E 2 ( z) = U 2 ( z) − V2 ( z),
V3 ( z) = Y ( z) − k1U1 ( z ) + λ3 z −1E 3 ( z), E 3 ( z ) = U 3 ( z ) − V3 ( z ), and Y ( z ) = z −1U1 ( z ).
Eliminating U1 ( z), V1 ( z),U 2 ( z ), V2 ( z ),U 3 ( z), and V3 ( z) from these equations we get
− k1 z −1 (1 + λ1 z −1 )
Y ( z)
G1 ( z) =
=
,
E1 ( z ) E ( z ) = E ( z ) = 0 1 − [2 − k1 (k1 + k 2 )]z −1 + (1 − k1k2 )z − 2
2
3
G2 ( z ) =
− k1 z −1 (1 − z −1 )(1 + λ2 z −1 )
Y ( z)
=
,
E 2 ( z ) E ( z ) = E ( z ) = 0 1 − [2 − k1 (k1 + k 2 )]z −1 + (1 − k1k 2 )z − 2
1
3
G3 ( z ) =
z −1 (1 − z −1 )(1 + λ3 z −1 )
Y ( z)
=
.
E 3 ( z ) E ( z ) = E ( z ) = 0 1 − [2 − k1 (k1 + k 2 )]z −1 + (1 − k1k 2 )z − 2
1
2
Not for sale
480
2
2
2
The total output noise power is thus given by σ 2o = G1 2 σ 2e1+ G2 2 σ e22 + G3 2 σ 2e3 . Hence, the
output noise power for a lowpass filter design can be reduced by placing zeros of the noise
transfer functions in the passband. For each of the noise transfer functions given above, we can
only place one zero at z = 1 by choosing λi = −1, i = 1, 2, 3, in which case, using the notations
b = −[2 − k1 (k1 + k2 )] and d = 1 − k1k2 , the noise transfer functions reduce to
G1 ( z ) =
G2 ( z ) =
G3 ( z ) =
− k1 z −1 (1 − z −1 )
1 + b z −1 + d z − 2
− k1 z −1 (1 − z −1 ) 2
1 + b z −1
+ d z−2
z −1 (1 − z −1 ) 2
− k1 z + k1
=
z2 + b z + d
=
=
,
− k1 ( z 2 + z + 1)
z( z 2
+ b z + d)
z2 + z + 1
=
=
− k1 A
Cz + D
,
+
2
z
z + bz + d
A
Cz + D
1
1
+
, where A = , C = 1 − ,
z z2 + b z + d
d
d
1 + b z − 1 + d z − 2 z( z 2 + b z + d )
b⎞
⎛
and D = −⎜ 2 + ⎟. Using Table 12.4 we then obtain
d⎠
⎝
2(1 − d 2 ) − 2(1 − d )b
2
G1 2 = k12 ⋅
,
(1 − d 2 ) 2 + 2db 2 − (1 + d 2 )b 2
(C 2 + D 2 )(1 − d 2 ) − 2CD(1 − d )b
2
2
2
G3 2 = A 2 + 2 BC +
, and G 2 2 = k12 G3 2 .
2
2
2
2
2
(1 − d ) + 2db − (1 + d )b
12.40 The coupled-form structure with state-variables labeled is shown below:
s 2[n+1]
x[n]
γ
_
z 1
s 1[n+1]
δ
α
y[n]
_
z 1
β
Its transfer function is given by Eq. (12.19) where α = δ = r cos θ and β = − γ = r sin θ .
Analysis of the above structure yields s1[ n + 1] = α(x[ n] + s1[ n]) + βs2 [ n] and
s 2 [ n + 1] = γ(x[ n] + s1[ n]) + δs2 [ n]. Rewriting these two equations in matrix form we get
⎡ s1[ n + 1] ⎤ ⎡α β ⎤ ⎡ s1[ n] ⎤ ⎡α ⎤
⎡α β ⎤
⎢⎣ s 2 [ n + 1]⎥⎦ = ⎢⎣ γ δ ⎥⎦ ⎢⎣ s 2 [ n]⎥⎦ + ⎢⎣ γ ⎥⎦ x[ n]. Thus, A = ⎢⎣ γ δ ⎥⎦. Therefore,
α γ ⎤ ⎡α β ⎤ ⎡α 2 + γ 2 αβ + γδ ⎤ ⎡r 2 0 ⎤
=⎢
A t A = ⎡⎢
. Likewise,
⎥=
⎣ β δ ⎥⎦ ⎢⎣ γ δ ⎥⎦ ⎣ αβ + γδ β 2 + δ 2 ⎦ ⎢⎣ 0 r 2 ⎥⎦
α β ⎤ ⎡ α γ ⎤ ⎡α 2 + β 2 αγ + βδ ⎤ ⎡r 2 0 ⎤
=⎢
AA t = ⎡⎢
. Since for stability r < 1, A is a
⎥=
⎣ γ δ ⎥⎦ ⎢⎣ β δ ⎥⎦ ⎣ αγ + βδ γ 2 + δ 2 ⎦ ⎢⎣ 0 r 2 ⎥⎦
normal form matrix, and hence the coupled-form structure does not support limit cycles.
Not for sale
481
12.41 The modified coupled-form structure with state-variables labeled is shown on top of the next
page. Its transfer function determined in the solution of Problem 12.4 is given by
c2
H ( z) =
. Now, a second-order transfer function with poles at
z 2 − 2cdz + c 2 (1 + d 2 )
x[n]
s 1[n+1]
_
z 1
s 2[n+1] _
z 1
c
d
c
y[n]
d
_1
z = r e ± jθ has a denominator given by z 2 − 2r cos θ ⋅ z + r 2 . Comparing this denominator with
that of H(z), we get c = r sin θ and d = cot θ.
Analyzing the modified coupled-form structure we arrive at the following equations:
s1[ n + 1] = c d s1[ n] − c s2 [ n] + x[ n] and s2 [ n + 1] = c s1[ n] + c d s2 [ n] . Rewriting these two
⎡ s [ n + 1] ⎤ ⎡cd − c ⎤ ⎡ s1[ n] ⎤ ⎡1 ⎤
equations in matrix form we get ⎢ 1
=
+
x[ n]. Thus,
⎣ s 2 [ n + 1]⎥⎦ ⎢⎣ c cd ⎥⎦ ⎢⎣ s 2 [ n]⎥⎦ ⎢⎣0 ⎥⎦
A = ⎡cd − c ⎤ = ⎡r cos θ − r sin θ ⎤. Therefore,
⎢⎣ c cd ⎥⎦ ⎢⎣ r sin θ r cos θ ⎥⎦
⎡ 2 0⎤
A t A = ⎡ r cos θ r sin θ ⎤ ⎡r cos θ − r sin θ ⎤ = ⎢r
. Likewise,
⎢⎣ − r sin θ r cos θ ⎥⎦ ⎢⎣ r sin θ r cos θ ⎥⎦ ⎣ 0 r 2 ⎥⎦
⎡ 2 0⎤
AA t = ⎡r cos θ − r sin θ ⎤ ⎡ r cos θ r sin θ ⎤ = ⎢r
. Since for stability r < 1, A is a
⎢⎣ r sin θ r cos θ ⎥⎦ ⎢⎣ − r sin θ r cos θ ⎥⎦ ⎣ 0 r 2 ⎥⎦
normal form matrix, and hence the modified coupled-form structure does not support limit
cycles.
z −1
⇒ z = δ Γ + 1.
Γ
β + β1 z −1 + β2 z −2 β0 z 2 + β1 z + β2
. Therefore,
H ( z) = 0
=
1 + α1 z −1 + α2 z − 2
z 2 + α1 z + α2
12.42 δ =
β z 2 + β1 z + β2
β (δΓ + 1) 2 + β1 (δΓ + 1) + β2
H ( δ ) = H ( z ) z = δΓ + 1 = 0
= 0
z 2 + α1 z + α 2 z = δΓ + 1
(δΓ + 1) 2 + α1 (δΓ + 1) + α 2
β (δ 2 Γ 2 + 2δΓ + 1) + β1 (δΓ + 1) + β2 ( β0 Γ 2 )δ 2 + (2 β0 Γ + β1Γ)δ + ( β0 + β1 + β2 )
= 0
=
(δ 2 Γ 2 + 2δΓ + 1) + α1 (δΓ + 1) + α2
Γ 2 δ 2 + (2Γ + α1Γ)δ + (1 + α1 + α2 )
=
( β0 Γ 2 ) + (2 β0 Γ + β1Γ)δ −1 + ( β0 + β1 + β2 )δ −2
Γ 2 + (2Γ + α1Γ)δ −1 + (1 + α1 + α 2 )δ − 2
Not for sale
.
482
12.43 From Section 11.3.1 we know that computation of each DFT sample requires 2 N + 4 real
multiplications. Assuming that the quantization noise generated from each multiplier is
independent of the noise generated from other multipliers, we get
2 −2 b ( N + 2)
σ r2 = (2 N + 4)σ o2 =
.
6
2 2b
2 2b
12.44 SNR =
. Hence, an SNR of 30 dB implies
= 10 3 , or
2
2
N
N
(
1
2
)
b = log 2 10 3 × 512 2 = 12.9829. We choose b + 1 = 14 bits per sample to get an SNR of 30
dB.
12.45 Let N = 2 ν. Consider the m -th stage. The output sees 4(2 ν − m ) noise sources from the m -th
1
stage. Each noise source has a variance reduction by a factor of ⎛⎜ ⎞⎟
⎝ 4⎠
by
1
2
ν−m
due to multiplication
at each stage till the output. Hence the total noise variance at the output due to the noises
(
)(
)
ν
ν
output = σ 2 = ∑ 4(2 ν − m )(2 − 2(ν − m ) )σ o2 = 4σ o2 2 − ν ∑ 2 m
injected in the m -th stage is 4 2 ν − m 2 − 2(ν − m) σ o2 . Therefore, the total noise variance at the
m =1
⎛ 2 − 2b
⎞ −ν
⎟2 ⎜
= 4⎜⎜
⎟
⎜
12
⎝
⎠
⎝
m =1
⎛ 2( 2 ν
− 1) ⎞⎟ 2 − 2b
− ν ) ≈ 2 2 − 2 b for large N .
=
2
(
1
−
2
2 − 1 ⎟⎠ 3
3
(
)
2b
1
12.46 SNR = 2 . Hence, b = log 2 10 3 × 2 × 256 = 9.4829. We choose b + 1 = 11 bits per
2
2N
sample to get an SNR of 30 dB.
22b
1
2.5
SNR =
. Hence b = log 2 (10 ) × 5 × 256 = 10.1439 . We choose b+1 = 12 bits per
2N
2
sample to get an SNR of 30dB. CHECK
(
)
M12.1 %POLE_PLOT
% POLE_PLOT(B) obtains the pole distribution
% plot of a second order transfer function with a denominator
% of the form Z*Z - KZ + L. For stability 0 < L < 1 and
% abs(K) < 1+L so the range of K is (-2,2).
%
% for a B-bit wordlength, 1 bit is reserved for the sign
% as the coefficients are sorted in the sign magnitude form.
% Both L and the K are quantizd to B-1 bits.
%
function[]=pole_plot(bits);
point = 'o';
%
Not for sale
483
% This part prints the unit circle for reference
% One bit is kept for the sign so effectively for the
% quantization. The remaining number of bits is bits-1
%
bits = bits-1;
%
% sets up the axis
zplane(2,2); % plotting queue of roots using zplane.m with a
% dummy zero and pole
axis([-1 1 -1 1]); % adjusting axis to "hide" dummy zero/pole,
% calling zplane without a zero is not legal in MATLAB release
% 12 and 13
title(['Second order Pole distribution for ',num2str(bits+1),'
bits']);
hold on;
%
% The quantization step.
%
step = power(2,-bits);
for index_1 = 0:1:(power(2,bits)-1) % 0 < index1 < 2^bits-1
L = index_1*step;
% 0 < L < 1
for index_2 = -(power(2,bits)-1):1:(power(2,bits)-1)
% -2^bits-1 < index2 < 2^bits-1
K = 2*index_2*step;
% -2 < K < 2
p = roots([1 -K L]);
% finding roots
if abs(p(1)) < 1
% testing root 1
if (imag(p(1)) == 0)
% real root
plot(p(1),0,point); % plotting
else
% complex root
plot(p(1),point);
% plotting
end
end
if abs(p(2)) < 1
% testing root 2
if (imag(p(1)) == 0)
% real root
plot(p(2),0,point); % plotting
else
% complex root
plot(p(2),point);
% plotting
end
end
% title(['L = ',num2str(L),' K = ',num2str(K)]);
% above 3 lines for debugging/demo purposes
% place break here and step thru to see poles for each L and K
end
end
title(['Second order Pole distribution for ',num2str(bits+1),'
bits']);
hold off;
Not for sale
484
M12.2 The pole-distribution plot of the second-order direct form structure is obtained by running the
MATLAB program given in Exercise M12.1. Running this program using the statement
pole_plot(4) yields the following plot:
Imaginary Part
Second order Pole distribution for 4 bits
1
0.5
0
-0.5
-1
-1
-0.5
0
0.5
Real Part
1
For plotting the pole distribution of the coupled form structure, we use the following MATLAB
program:
% POLE_PLOT_COUPLED(B) obtains the pole distribution
% plot of a second order transfer function in coupled form
% with the transfor function rZ^2 / Z^2 - (a + d)Z + (ad - br)
% For stability -1 < a,b,d,r < 1
%
% for a B-bit wordlength, 1 bit is reserved for the sign
% as the coefficients are sorted in the sign magnitude form.
% Both L and the K are quantizd to B-1 bits.
%
function[]=pole_plot_coupled(bits);
bits = 4;
point = '.';
%
% This part prints the unit circle for referenc
%
% One bit is kept for the sign so effectively for the
% quantization, the remaining number of bits is bits-1
%
bits = bits-1;
%
% sets up the axis
zplane(2,2);
% plotting queue of roots using zplane.m with a
% dummy zero and pole
axis([-1 1 -1 1]); % adjusting axis to "hide" dummy zero/pole,
% calling zplane without a zero is not legal in MATLAB release
% 12 and 13
title(['Second-order coupled form pole distribution for ',
num2str(bits+1),' bits']);
hold on;
%
Not for sale
485
% The quantization step.
%
step = power(2,-bits);
for index_1 = -(power(2,bits)-1):1:(power(2,bits)-1)
a = index_1*step;
for index_2 = -(power(2,bits)-1):1:(power(2,bits)-1)
% -2^bits-1 < index2 < 2^bits-1
b = index_2*step;
for index_3 = -(power(2,bits)-1):1:(power(2,bits)-1)
d = index_3*step;
for index_4 = -(power(2,bits)-1):1:(power(2,bits)-1)
r = index_4*step;
p = roots([1 -(a+d) (a*d-b*r)]);
% finding roots
if abs(p(1)) < 1 % testing root 1
if (imag(p(1)) == 0)
% real root
plot(p(1),0,point); % plotting
else
% complex root
plot(p(1),point);
% plotting
end
end
% testing root 2
if (imag(p(1)) == 0)
% real root
plot(p(2),0,point); % plotting
else
% complex root
plot(p(2),point);
% plotting
end
end
end
end
% title(['a = ',num2str(a),' b = ',num2str(b),'d =
',num2str(d),' r = ',num2str(r)]);
end
end
title(['Second-order coupled form pole distribution for
',num2str(bits+1),' bits']);
hold off;
M12.3 % Modified Program 12_1
% Coefficient Quantization Effects on the frequency
% response of a direct form IIR filter
clf;
[b,a] = ellip(7,0.02,55,0.7,'high');
[h,w] = freqz(b,a,512);
g = 20*log10(abs(h));
% Truncate the filter coefficients to 5 bits
bq = a2dT(b,6); aq = a2dT(a,6);
[hq,w] = freqz(bq,aq,512);
gq = 20*log10(abs(hq));
Not for sale
486
plot(w/pi,g,'b',w/pi,gq,'r:'); grid; axis([0 1 -80 5]);
xlabel('\omega/\pi'); ylabel('Gain, dB');
title('original - solid line, quantized - dashed line');
pause
% The call to the ZPLANE function below sets the axes
% properties to those corresponding to a pole-zero plot
zplane(b,a);
% The HOLD ON command retains the axes properties as
% they are and does not create new axes for the next plot
hold on;
plotzp(bq,aq)
M12.4 MATLAB code fragments are as follows:
num = [0.06891875 0.13808186 0.18636107 0.13808186 0.06891875];
den = [1 -1.30613249 1.48301305 -0.77709026 0.2361457];
nvar = filternorm(num,den)^2;
disp('Normalized Output Noise Variance = ');disp(nvar)
The computed noise variance is
Normalized Output Noise Variance =
0.4026
which is seen to be the same as that determined in Example 12.5..
M 12.5 MATLAB code is shown below:
N = 7; wn = 0.45; Rp = 0.2; Rs = 50;
[B,A] = ellip(N,Rp,Rs,wn);
zplane(B,A);
z = cplxpair(roots(B)); p = cplxpair(roots(A));
const = B(1)/A(1);
disp('Numerator Factors');
factor = factorize(B);disp(factor)
disp('Denominator Factors');
factor = factorize(A);disp(factor)
disp('Scale factor = ');disp(const)
sos = zp2sos(z,p,const)
The above program yields
Not for sale
487
Numerator Factors
1.0000
1.0000
1.0000
1.0500
1.0000
0.2577
1.0000
0.0072
0
1.0000
1.0000
1.0000
Denominator Factors
1.0000 -0.2756
1.0000 -0.3951
1.0000 -0.6694
1.0000 -0.4353
0.9379
0.7545
0.4245
0
Scale factor =
0.03485569511749
⎛
⎞⎛ 1 + 0.2577 z −1 + z − 2 ⎞
1 + 1.05z −1 + z − 2
⎟⎜
⎟×
H ( z ) = 0.0349⎜⎜
−1 + 0.9379 z − 2 ⎟⎜ 1 − 0.3951 + 0.7545 z − 2 ⎟
−
1
0
.
2756
z
⎝
⎠⎝
⎠
⎛ 1 + 0.0072 z −1 + z − 2 ⎞⎛ 1 + z −1
⎞
⎜
⎟⎜
⎟.
⎜ 1 − 0.6694 + 0.4245z − 2 ⎟⎜ 1 − 0.4353z −1 ⎟
⎝
⎠⎝
⎠
Note that the ordering has no effect if L∞ − scaling is used.
Imaginary Part
1
0.5
0
-0.5
-1
-1
-0.5
0
0.5
Real Part
1
sos =
0.0349
1.0000
1.0000
1.0000
0.0349
1.0500
0.2577
0.0072
0
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
1.0000
-0.4353
-0.6694
-0.3951
-0.2756
0
0.4245
0.7545
0.9379
M 12.6 %Program_M12_6.m
[B,A] = ellip(7,0.2,50,0.45);
[d0,d1]=tf2ca(B,A);
num1 = 0.5*(conv(fliplr(d1),d0)+conv(d1,fliplr(d0)));
den = conv(d0,d1);
num2 = 0.5*(-conv(fliplr(d1),d0)+conv(d1,fliplr(d0)));
[h1,w]=freqz(num1,den,512);
[h2,w]=freqz(num2,den,512);
plot(w/pi,20*log10(abs(h1)),'-r',w/pi,20*log10(abs(h2)),'--b');
Not for sale
488
xlabel('\omega/\pi');ylabel('Gain, dB');grid
Passband Details
HLP(z)
0
-20
Gain, dB
Gain, dB
0
0.05
HHP(z)
-40
-0.05
-0.1
-0.15
-0.2
-60
0
0.2
0.4
0.6
0.8
1
-0.25
0
ω/ π
0.1
0.2
0.3
0.4
0.5
ω/ π
M12.7
num1
num2
den1
den2
=
=
=
=
input('Numerator first factor = ');
input('Numerator second factor = ');
input('Denominator first factor = ');
input('Denominator second factor = ');
% The scaling functions are
f1num = 1;
f1den = [den1];
f2num = num1;
f2den = conv(den1,den2);
f3num = conv(num1,num2);
f3den = conv(den1,den2);
x = [1 zeros([1,511])];
% Impulse Responses
% Sufficient length for impulse response to have
% decayed to nearly zero
f1 = filter(f1num,f1den,x);
f2 = filter(f2num,f2den,x);
f3 = filter(f3num,f3den,x);
figure(1),stem(f1(1:50));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_1(z)')
figure(2),stem(f2(1:50));
Not for sale
489
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_2(z)')
figure(3),stem(f3(1:50));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of H(z)')
k1 = sum(f1.*f1);
k2 = sum(f2.*f2);
k3 = sum(f3.*f3);
disp(['L_2 norm of F_1(z) = ' num2str(k1)]);
disp(['L_2 norm of F_2(z) = ' num2str(k2)]);
disp(['L_2 norm of H(z)
= ' num2str(k3)]);
b_0 = 1/sqrt(k1);
b_1 = sqrt(k1)/sqrt(k2);
b_2 = sqrt(k2)/sqrt(k3);
disp(['First scaling factor, b_0 = ' num2str(b_0)]);
disp(['Second scaling factor, b_1 = ' num2str(b_1)]);
disp(['Third scaling factor, b_2 = ' num2str(b_2)]);
% The scaled transfer functions
disp(['Scaled gain = ' num2str(k1)]);
disp('The scaled second order sections are ')
disp([k2*num1 k3*num2 ; den1 den2])
% The noise transfer functions
g1num = conv(num1,num2)*(k2*k3);
g1den = conv(den1,den2)*k3;
g2num = num2;
g2den = den2;
g1 = filter(g1num,g1den,x);
g2 = filter(g2num,g2den,x);
var = sum(f1.*f1)*3+sum(g2.*g2)*5+3;
disp('The normalized noise variance'); disp(var);
For the first cascade realization we have
L_2 norm of F_1(z) = 4.9808
L_2 norm of F_2(z) = 88.2071
L_2 norm of H(z)
= 64.2444
First scaling factor, b_0 = 0.44807
Second scaling factor, b_1 = 0.23763
Third scaling factor, b_2 = 1.1717
Scaled gain = 4.9808
The scaled second order sections are
88.2071 -66.9403
88.2071
64.2444
1.0000
1.0462
0.8385
1.0000
42.1700
1.0657
64.2444
0.4046
The normalized noise variance
35.5077
Not for sale
490
For the second cascade realization we have
L_2 norm of F_1(z) = 2.8179
L_2 norm of F_2(z) = 11.375
L_2 norm of H(z)
= 64.2444
First scaling factor, b_0 = 0.59572
Second scaling factor, b_1 = 0.49772
Third scaling factor, b_2 = 0.42078
Scaled gain = 2.8179
The scaled second order sections are
11.3750
7.4666
11.3750
64.2444
1.0000
1.0657
0.4046
1.0000
-48.7551
1.0462
64.2444
0.8385
The normalized noise variance
106.5131
The L_2 norm of F_1(z)
The L_2 norm of F_2(z)
The L_2 norm of H(z)
= 4.9808
= 11.375
= 64.2444
The first scaling factor, b_0
The second scaling factor, b_1
The third scaling factor, b_2
= 0.44807
= 0.66172
= 0.42078
The scaled gain = 4.9808
The scaled second order sections are
11.3750 7.4666 11.3750 64.2444 -48.7551 64.2444
1.0000 1.0462 0.8385 1.0000 1.0657 0.4046
The normalized noise variance = 98.0695
M12.8 The parallel form I and II structures used for the simulation are shown on top of the next
page:
Not for sale
491
k4
k0
+
k4
_ 1.4379k
1
k5
+
+
k0
+
_
z 1
_
z 1
_
z 1
0.9462k1
k5
+
+
+
+
_
z 1
0.8385
0.8385
k2
2.4525k 1
1.0462
1.0462
_ 0.5079k
k6
3
+
+
k2
1.0657
1.0657
_ 5.2081k
_
z 1
+
_
z 1
_
z 1
+
1.2072k 1
+
3
_ 4.6669k
3
k6
+
_
z 1
0.4046
0.4046
_ 0.2055k
3
The MATLAB program below can be used to simulate a 4-th order IIR transfer function in both
parallel forms.
num1
num2
den1
den2
=
=
=
=
input('Numerator first factor =');
input('Numerator Second factor =');
input('Denominator first factor =');
input('Denominator second factor =');
% Parallel Form I
num = conv(num1,num2);
den = conv(den1,den2);
[r1,p1,k11] = residuez(num,den);
R1 = [r1(1) r1(2)];
P1 = [p1(1) p1(2)];
R2 =[r1(3) r1(4)];
P2 = [p1(3) p1(4)];
[num11,den11] = residuez(R1,P1,0);
[num12,den12] = residuez(R2,P2,0);
disp('Parallel Form I');
disp('The numerators are');
disp(k11); disp(real(num11)); disp(real(num12));
disp('The denominators are');
disp(real(den11)); disp(real(den12));
imp = [1 zeros([1,2000])];
Not for sale
492
f0 = filter([1 0 0],den11,imp);
f1 = filter(num11,den11,imp);
f2 = filter([1 0 0],den12,imp);
f3 = filter(num12,den12,imp);
figure(1),stem(real(f0(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_0(z)')
saveas(gcf,'M12_8_P1_0.tif')
figure(2),stem(real(f1(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_1(z)')
saveas(gcf,'M12_8_P1_1.tif')
figure(3),stem(real(f2(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_2(z)')
saveas(gcf,'M12_8_P1_2.tif')
figure(4),stem(real(f3(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_3(z)')
saveas(gcf,'M12_8_P1_3.tif')
g0 = sum(f0.*conj(f0));
g1 = sum(f1.*conj(f1));
g2 = sum(f2.*conj(f2));
g3 = sum(f3.*conj(f3));
disp(['L_2 norm of F_0(z)
disp(['L_2 norm of F_1(z)
disp(['L_2 norm of F_2(z)
disp(['L_2 norm of F_3(z)
=
=
=
=
'
'
'
'
num2str(g0)]);
num2str(g1)]);
num2str(g2)]);
num2str(g3)]);
k0 = sqrt(1/g0);
k1 = sqrt(g0/g1);
k2 = sqrt(1/g2);
k3 = sqrt(g2/g3);
f = filter(num,den,imp);
g = sum(f.*conj(f));
k4 = sqrt(1/g);
k5 = k4/(k0*k1);
k6 = k4/(k2*k3);
disp('The
disp(['k0
disp(['k2
disp(['k4
disp(['k6
scaling constants are');
= ' num2str(k0)]); disp(['k1 = ' num2str(k1)]);
= ' num2str(k2)]); disp(['k3 = ' num2str(k3)]);
= ' num2str(k4)]); disp(['k5 = ' num2str(k5)]);
= ' num2str(k6)]);
noise = 3*(k5/k0)^2+3*(k6/k2)^2+2*k5^2+2*k6^2+3;
disp(['Product roundoff noise variance = ' num2str(noise)]);
% Parallel From II
Not for sale
493
num = conv(num1,num2);
den = conv(den1,den2);
[r1,p1,k11] = residue(num,den);
R1 = [r1(1) r1(2)];
P1 = [p1(1) p1(2)];
R2 =[r1(3) r1(4)];
P2 = [p1(3) p1(4)];
[num11,den11] = residue(R1,P1,0);
[num12,den12] = residue(R2,P2,0);
disp('Parallel Form II');
disp('The numerators are');
disp(k11); disp(real(num11)); disp(real(num12));
disp('The denominators are');
disp(real(den11)); disp(real(den12));
imp = [1 zeros([1,2000])];
f0 = filter([1 0 0],den11,imp);
f1 = filter(num11,den11,imp);
f2 = filter([1 0 0],den12,imp);
f3 = filter(num12,den12,imp);
figure(1),stem(real(f0(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_0(z)')
saveas(gcf,'M12_8_P2_0.tif')
figure(2),stem(real(f1(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_1(z)')
saveas(gcf,'M12_8_P2_1.tif')
figure(3),stem(real(f2(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_2(z)')
saveas(gcf,'M12_8_P2_2.tif')
figure(4),stem(real(f3(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of F_3(z)')
saveas(gcf,'M12_8_P2_3.tif')
g0 = sum(f0.*conj(f0));
g1 = sum(f1.*conj(f1));
g2 = sum(f2.*conj(f2));
g3 = sum(f3.*conj(f3));
disp(['L_2 norm of F_0(z)
disp(['L_2 norm of F_1(z)
disp(['L_2 norm of F_2(z)
disp(['L_2 norm of F_3(z)
=
=
=
=
'
'
'
'
num2str(g0)]);
num2str(g1)]);
num2str(g2)]);
num2str(g3)]);
k0 = sqrt(1/g0);
k1 = sqrt(g0/g1);
k2 = sqrt(1/g2);
Not for sale
494
k3 = sqrt(g2/g3);
f = filter(num,den,imp);
g = sum(f.*conj(f));
k4 = sqrt(1/g);
k5 = k4/(k0*k1);
k6 = k4/(k2*k3);
disp('The scaling constants are');
disp(['k0 = ' num2str(k0)]); disp(['k1 = ' num2str(k1)]);
disp(['k2 = ' num2str(k2)]); disp(['k3 = ' num2str(k3)]);
disp(['k4 = ' num2str(k4)]); disp(['k5 = ' num2str(k5)]);
disp(['k6 = ' num2str(k6)]);
noise = 3*(k5/k0)^2+3*(k6/k2)^2+2*k5^2+2*k6^2+3;
disp(['Product roundoff noise variance = ' num2str(noise)]);
Parallel Form I
The numerators are
2.9476
-1.4397
0.9462
-0.5079
-5.2081
0
0
The denominators are
1.0000
1.0462
1.0000
1.0657
0.8385
0.4046
L_2 norm of F_0(z) = 4.9808
L_2 norm of F_1(z) = 22.5061
L_2 norm of F_2(z) = 2.8179
L_2 norm of F_3(z) = 65.8497
The scaling constants are
k0 = 0.44807
k1 = 0.47044
k2 = 0.59572
k3 = 0.20686
k4 = 0.12476
k5 = 0.59188
k6 = 1.0124
Product roundoff noise variance = 19.6501
Parallel Form II
The numerators are
1
2.4525
1.2072
-4.6669
0.2055
The denominators are
1.0000
1.0462
1.0000
1.0657
0.8385
0.4046
L_2 norm of F_0(z) = 4.9808
L_2 norm of F_1(z) = 20.4333
Not for sale
495
L_2 norm of F_2(z) = 2.8179
L_2 norm of F_3(z) = 65.5918
The scaling constants are
k0 = 0.44807
k1 = 0.49372
k2 = 0.59572
k3 = 0.20727
k4 = 0.12476
k5 = 0.56396
k6 = 1.0104
Product roundoff noise variance = 19.0615
Parallel Form II has the lowest output round off noise.
M 12.9 The scaled Gray-Markel cascaded lattice structure used for simulation is shown below:
W4
_d
_ ''
d2
_d '
3
4
d4
z
α
1C
____
k4
d1'''
_1
_1
α 2C
____
k3 k 4
_ '''
d1
d 2''
d 3'
_1
W1
W2
W3
z
α 3C
____
k 2 k3 k 4
z
_
α 4C
_______
k 1k 2k 3k 4
z1
α 5C
_______
k 1k 2k 3k 4
The MATLAB program that can be used to simulate the Gray-Markel realization of a 4-th order
IIR transfer function is as follows:
num1
num2
den1
den2
=
=
=
=
input('Numerator first factor = ');
input('Numerator second factor = ');
input('Denominator first factor = ');
input('Denominator second factor = ');
num = conv(num1,num2); den = conv(den1,den2);
num = num/den(1); den = den/den(1);
% Gray-Markel realization
[d,alpha] = tf2latc(num,den);
disp('Lattice parameters are'); disp(['d1 = ' num2str(d(1))]);
disp(['d2 = ' num2str(d(2))]); disp(['d3 = ' num2str(d(3))]);
disp(['d4 = ' num2str(d(4))]);
disp('Feed-forward multipliers are');
disp(['alpha1 = ' num2str(alpha(1))]);
disp(['alpha2 = ' num2str(alpha(2))]);
disp(['alpha3 = ' num2str(alpha(3))]);
disp(['alpha4 = ' num2str(alpha(4))]);
imp = [1 zeros([1,499])];
qold1 = 0;
for k = 1:500
w1 = imp(k)-d(1)*qold1;
Not for sale
496
y1(k) = w1;
qnew1 = w1;
qold1 = qnew1;
end
k1 = sqrt(1/(sum(y1.*conj(y1))));
figure(1),stem(real(y1(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of W1')
saveas(gcf,'M12_9_1.tif')
imp = [1 zeros([1,499])];
qold1 = 0;qold2 = 0;
for k = 1:500
w2 = imp(k)-d(2)*qold2*1/k1;
w1 = k1*w2-d(1)*qold1;
y2(k)=w2;
qnew1 = w1;
qnew2 = w1*d(1)+qold1;
qold1 = qnew1;qold2 = qnew2;
end
k2 = sqrt(1/(sum(y2.*conj(y2))));
figure(2),stem(real(y2(1:50)));
ylabel('Amplitude'); xlabel('Samples');
title('Impulse Response of W2')
saveas(gcf,'M12_9_2.tif')
qold1 = 0;qold2 = 0;qold3 = 0;
for k = 1:500
w3 = imp(k)-d(3)*qold3*1/k2;
w2 = k2*w3-d(2)*qold2*1/k1;
w1 = k1*w2-d(1)*qold1;
y3(k) = w3;
qnew1 = w1;
qnew2 = w1*d(1)+qold1;
qnew3 = w2*d(2)+qold2*1/k1;
qold1 = qnew1;qold2 = qnew2;qold3 = qnew3;
end
k3 = sqrt(1/sum(y3.*conj(y3)));
figure(3),stem(real(y3(1:50))); ylabel('Amplitude');
xlabel('Samples'); title('Impulse Response of W3')
saveas(gcf,'M12_9_3.tif')
qold1 = 0;qold2 = 0;qold3 = 0;qold4 = 0;
for k = 1:500
w4 = imp(k)-d(4)*qold4/k3;
w3 = k3*w4-d(3)*qold3/k2;
w2 = k2*w3-d(2)*qold2/k1;
w1 = k1*w2-d(1)*qold1;
y4(k) = w4;
qnew1 = w1;
qnew2 = w1*d(1)+qold1;
qnew3 = w2*d(2)+qold2*1/k1;
qnew4 = w3*d(3)+qold3*1/k2;
qold1 = qnew1;qold2 = qnew2;qold3 = qnew3;qold4 = qnew4;
end
Not for sale
497
k4 = sqrt(1/sum(y4.*conj(y4)));
figure(4),stem(real(y3(1:50))); ylabel('Amplitude');
xlabel('Samples'); title('Impulse Response of W4')
saveas(gcf,'M12_9_4.tif')
disp('The scaling parameters are');
disp(['k1 = ' num2str(k1)]); disp(['k2 = ' num2str(k2)]);
disp(['k3 = ' num2str(k3)]); disp(['k4 = ' num2str(k4)]);
alpha(5) = alpha(5)/(k1*k2*k3*k4);
alpha(4) = alpha(4)/(k1*k2*k3*k4);
alpha(3) = alpha(3)/(k2*k3*k4);
alpha(2) = alpha(2)/(k3*k4);
alpha(1) = alpha(1)/k4;
%%%% Computation of noise variance %%%%%%
imp = [1 zeros([1,499])];
for k = 1:500
w4 = imp(k)-d(4)*qold4/k3;
w3 = k3*w4-d(3)*qold3/k2;
w2 = k2*w3-d(2)*qold2/k1;
w1 = k1*w2-d(1)*qold1;
qnew1 = w1;
qnew2 = w1*d(1)+qold1;
qnew3 = w2*d(2)+qold2*1/k1;
qnew4 = w3*d(3)+qold3*1/k2;
y11 = w4*d(4)+qold4/k3;
y0(k) = alpha(1)*y11+alpha(2)*qnew4+alpha(3)*qnew3 +
alpha(4)*qnew2+alpha(5)*qnew1;
qold1 = qnew1;qold2 = qnew2;qold3 = qnew3;qold4 = qnew4;
end
nv = sum(y0.*conj(y0));
disp(['Product roundoff noise variance = ' num2str(nv)]);
The output data generated by this program are as follows:
Lattice parameters are
d1 = 0.19149
d2 = 0.75953
d3 = 0.44349
d4 = 0.27506
Feed-forward multipliers are
alpha1 = -0.9001
alpha2 = -1.7069
alpha3 = 4.6151
alpha4 = -3.5028
alpha5 = 1.8177
The scaling parameters are
k1 = 0.98149
k2 = 0.65047
k3 = 0.89628
k4 = 0.96143
Not for sale
498
The product roundoff noise variance = 81.1431
M12 .10 (a)
y[ −1] = 0.3, x[ 0] = 0.08
(b) y[ −1] = 0.9, x[ 0] = 0.03
α = 0.6
0.25
0.5
0.2
0.4
Amplitude
Amplitude
α = 0.6
0.15
0.1
0.05
0
0.3
0.2
0.1
0
5
10
Time index n
15
0
20
0
5
10
Time index n
15
20
(c) y[ −1] = 8, x[ 0] = 5
α = 0.6
α = 0.6
0.04
10
0.03
Amplitude
Amplitude
8
6
4
0.01
2
0
0.02
0
5
10
Time index n
15
0
20
0
5
10
Time index n
15
20
In all three cases, the condition of Eq. (12.187) is satisfied and hence, the structure exhibits
zero input granular limit cycles.
M 12.11 Plot of the output samples generated by the modified program is shown below:
α 1 = -0.875
α 2 = 0.875
0.4
Amplitude
0.2
0
-0.2
-0.4
0
10
20
Time index n
Not for sale
30
40
499
As can be seen from the above plot, output goes to zero values and hence the structure of
Figure 12.49 does not support overflow limit cycles if sign-magnitude truncation is used to
truncate the sum of products of Eq. (12.195).
Not for sale
500
Chapter 13
13.1 Up-sampler – Let x1[ n] and x 2 [ n] be the inputs to a factor-of-L up-sampler with
corresponding outputs given by y1[ n] and y2 [ n] , respectively:
⎧ x [ n / L ], n = 0, ± L, ± 2 L,K, and
⎧ x [ n / L ], n = 0, ± L, ± 2 L,K,
y1[ n] = ⎨ 1
y 2 [ n] = ⎨ 2
otherwise,
0,
otherwise.
⎩ 0,
⎩
Let x 3 [ n] = αx1[ n] + βx 2 [ n] be the input to the up-sampler. Then, the corresponding
⎧ x [ n / L ], n = 0, ± L, ± 2 L,K,
output y3 [ n] is given by y3 [ n] = ⎨ 3
0,
otherwise,
⎩
⎧αx [ n / L ] + βx 2 [ n / L ], n = 0, ± L, ± 2 L,K,
=⎨ 1
0,
otherwise,
⎩
⎧αx [ n / L ], n = 0, ± L, ± 2 L,K, ⎧ βx 2 [ n / L ], n = 0, ± L, ± 2 L,K,
=⎨ 1
+⎨
0,
otherwise,
0,
otherwise,
⎩
⎩
= αy1[ n] + βy2 [ n]. Hence, the up-sampler is a linear system.
Down-sampler - Let x1[ n] and x 2 [ n] be the inputs to a factor-of-M down-sampler with
corresponding outputs given by y1[ n] and y2 [ n] , respectively:
y1[ n] = x1[ Mn] and y2 [ n] = x 2 [ Mn]. Let x 3 [ n] = αx1[ n] + βx 2 [ n] be the input to the
up-sampler. Then, the corresponding output y3 [ n] is given by y3 [ n] = x 3 [ Mn]
= αx1[ Mn] + βx 2 [ Mn] = αy1[ n] + βy2 [ n]. Hence, the down-sampler is a linear system.
13.2 Up-Sampler – For inputs x1[ n] and x 2 [ n], the outputs of the factor-of-L up-sampler
are, respectively given by
⎧ x [ n / L ], n = 0, ± L, ± 2 L,K,
⎧ x [ n / L ], n = 0, ± L, ± 2 L,K
and x u 2 [ n] = ⎨ 2
.
x u1 [ n] = ⎨ 1
0
,
otherwise,
0,
otherwise,
⎩
⎩
Let x 2 [ n] = x1[ n − no ], where no is an integer. Then, x 2 [ n / L ] = x1[(n / L ) − no ]. Hence,
⎧ x [(n − n o ) / L ], n = 0, ± L, ± 2 L,K,
But,
x u 2 [ n] = ⎨ 1
0,
otherwise.
⎩
⎧ x [(n − n o ) / L ], n − n o = 0, ± L, ± 2 L,K,
x u1 [ n] = ⎨ 1
0,
otherwise.
⎩
Since xu2 [ n] ≠ xu1 [ n − no ], the up-sampler is a time-varying system.
Down-Sampler – For inputs x1[ n] and x 2 [ n], the outputs of the factor-of-M downsampler are, respectively given by y1[ n] = x1[ Mn] and y2 [ n] = x 2 [ Mn]. Let
x 2 [ n] = x1[ n − n o ], where no is an integer. Then, y2 [ n] = x 2 [ Mn] = x1[ Mn − no ].
However, y1[ n − no ] = x1[ M (n − no )] = x1[ Mn − Mno ].
Since y 2 [ n] ≠ y1[ n − n o ], the down-sampler is a time-varying system.
Not for sale
499
13.3
X(z)
2
V(z)
Vu (z)
2
_
z1
_
z1
2
Analysis yields V ( z ) =
W ( z) =
z −1 / 2
2
Wu ( z ) =
z −1
2
1
2
X ( z1 / 2 ) −
X ( z) −
z −1
2
W(z)
2
Y(z)
Wu (z)
1
2
X ( z1 / 2 ) + X (− z1 / 2 ),
z −1 / 2
2
X (− z1 / 2 ), Vu ( z ) =
1
2
1
2
X ( z ) + X (− z ),
X (− z ). Hence, Y ( z ) = z −1V u( z) +W u( z ) = z −1 X ( z), or in other
words y[ n] = x[ n − 1].
13.4 c[ n] =
M −1
⎛ 1 − W nM
1
M
kn = 1 ⎜
WM
n
⎜
M k =0
M ⎝ 1 − WM
∑
⎛
⎞
⎟. Hence, if n ≠ rM , c[ n] = 1 ⎜ 1 − 1
n
⎟
M ⎜⎝ 1 − WM
⎠
the other hand, if n = rM , then c[ n] =
M −1
M −1
∑
⎞
⎟ = 0. On
⎟
⎠
M −1
∑
∑
1
M
krM = 1
kn = 1
1=
= 1.
WM
WM
M k =0
M k =0
M k =0
M
13.5 (a) For M = 6 and L = 5,
− k } = {W − k } = {W 0 , W −1 , W −2 , W −3 , W −4 , W −5} , and
{WM
6
6
6
6
6
6
6
− Lk } = {W −5k } = {W 0 , W −5 , W −10 , W −15 , W −20 , W −25}
{WM
6
6
6
6
6
6
6
= {W60 , W6−5 , W6−4 , W6−3 , W6−2 , W6−1} = {W6− k }.
− k } to have same set of values for 0 ≤ k ≤ M − 1, as {W − kL } , each should
(b) For {WM
M
−
kL
−
nL
have unique values for each k. Therefore WM ≠ WM for all k , n ∈ [0, M − 1], or
( k − n) L ≠ rM for any positive integer r, which implies that L and M should be
relatively prime.
13.6
X(z)
M
V 1(z)
H(z)
Y 1(z)
X(z)
H(zM )
For the figure on the left-hand side we have V1 ( z ) =
V 2(z)
M
Y 2(z)
M −1
∑
1
k ), and
X ( z 1 / M WM
M k =0
M −1
∑
1
k ). For the figure on the right-hand side we have
Y1 ( z ) =
H ( z ) X ( z1 / M WM
M k =0
Not for sale
500
V2 ( z ) =
M −1
M −1
∑
∑
1
kM ) X ( z1 / M W k ) = 1
k ).
H ( zWM
H ( z ) X ( z1 / M WM
M
M k =0
M k =0
H ( z M ) X ( z ), Y2 ( z ) =
Hence, Y1 ( z) = Y2 ( z).
X(z)
V 1(z)
L
H(z L )
Y 1(z)
V 2(z)
H(z)
X(z)
Y 2(z)
L
For the figure on the left-hand side we have V1 ( z ) = X ( z L ), Y1 ( z ) = H ( z L ) X ( z L ). For the
figure on the right-hand side we have V2 ( z ) = H ( z ) X ( z ), Y2 ( z ) = H ( z L ) X ( z L ). Hence,
Y1 ( z) = Y2 ( z).
13.7 (a) The system of Figure P13.1 with internal variables labeled is shown below:
X(z)
L
V(z)
G(z)
U(z)
L
Y(z)
Analysis yields V ( z ) = X ( z L ), U ( z ) = G ( z )V ( z ), and Y ( z ) =
L −1
∑
1
U ( z1 / L WL− k ).
L k =0
Substituting the first equation in the second equation we get U ( z ) = G ( z ) X ( z L ).
Substituting this equation in the expression for Y (z ) in the above we get
Y ( z) =
L −1
L −1
∑
∑
1
1
G( z1 / L ⋅ WL− k ) X ( z ⋅ WL− kL ) =
G( z1 / L ⋅ WL− k ) X ( z ), since WL−kL = 1.
L k =0
L k =0
L −1
∑
Y (z) 1
Therefore, H ( z ) =
=
G( z1 / L WL− k ). Hence, Figure P13.1 is a LTI system.
X ( z) L k = 0
L −1
(b) It follows from the last equation given above, if
∑
1
G( z1 / L WL− k ) = 1, then
L k =0
H ( z ) = 1, i.e., Y ( z ) = X ( z ), or y[ n] = x[ n]. Or, in other words, the system of Figure
L −1
∑
1
P13.1 is an identity system for
G( z1 / L WL− k ) = 1.
L k =0
13.8 Consider the multirate structure shown below. Analysis yields
x[n]
L
H(z)
1
U ( z ) = H ( z ) X ( z ), and Y ( z ) =
L
L
L −1
u[n]
∑ G( z
G(z)
L
y[n]
1/ L
W Lk )U ( z 1 / LW Lk ). Substituting the first
k =0
Not for sale
501
⎡ 1 L −1
⎤
equation into the second we get Y ( z ) = ⎢
G ( z 1 / LWLk ) H ( z 1 / LW Lk )⎥ X ( z ). Hence,
⎢L
⎥
⎣ k =0
⎦
∑
1
if
L
L −1
∑ G( z
1/ L
W Lk ) H ( z 1 / LW Lk ) = 1, we have Y ( z ) = X ( z ), or in other words, the
k =0
above multirate structure is an identity system. We break the system as shown below
into two parts with the transfer functions and satisfying the relation
L
x[n]
1
L
L −1
∑ G( z
G(z)
u[n] u[n]
H(z)
L
x[n]
1/ L
W Lk ) H ( z 1 / LW Lk ) = 1. If we now place the second system in front of the
k =0
first we arrive at the system shown in Figure P13.2 which is an identity system
1
provided
L
L −1
∑ G( z
1/ L
W Lk ) H ( z 1 / LW Lk ) = 1.
k =0
13.9 Making use of the multirate identities we simplify the structure of Figure P13.3 as
indicated below:
x[n]
x[n]
5
15
3
3
3
x[n]
5
y[n]
5
5
v[n]
5
y[n]
y[n]
Analysis of the last structure yields, v[ n] = x[5n], and
v[ n / 5], n = 0, ± 5, ± 10,K,
x[ n], n = 0, ± 5, ± 10,K,
y[ n] = ⎧⎨
or, y[ n] = ⎧⎨
otherwise,
otherwise.
⎩ 0,
⎩ 0,
13.10
x[n]
L
v[n]
L
y[n]
⎧v[ n / L ], n = 0, ± L, ± 2 L,K, or,
Analysis yields v[ n] = x[ Ln], and y[ n] = ⎨
otherwise,
⎩ 0,
x[ n], n = 0, ± L, ± 2 L,K,
y[ n] = ⎧⎨
otherwise.
⎩ 0,
Not for sale
502
13.11 Since 3 and 4 are relatively prime, we can interchange the positions of the factor-of-3
down-sampler and the factor-of-4 up-sampler as indicated below:
_
z 6
x[n]
2
3
y[n]
4
which simplifies to the structure shown below:
x[n]
_
z 6
6
y[n]
4
Using the Noble identity of Figure 13.14(a) we redraw the above structure as indicated
below:
x[n]
6
u[n]
_
z 1
v[n]
y[n]
4
Analysis yields u[ n] = x[6 n], v[ n] = u[ n − 1] = x[6 n − 1], and
v[ n / 4], n = 0, ± 4, ± 8,K, ⎧ x[(3n / 2) − 1], n = 0, ± 4, ± 8,K,
=⎨
y[ n] = ⎧⎨
otherwise,
otherwise.
0,
⎩ 0,
⎩
13.12 As outlined in Section 8.2, the transpose of a digital filter structure is obtained by
reversing all paths, replacing the pick-off node with an adder and vice-versa, and
interchanging the input and the output nodes. Moreover, in a multirate structure, the
transpose of a factor-of-M down-sampler is a factor-of-M up-sampler and vice-versa.
Applying these operations to the factor-of-M decimator shown below on the left-hand
side, we arrive at a factor-of-M up-sampler shown below on the right-hand side.
x[n]
H(z)
M
y[n]
x[n]
M
H(z)
y[n]
13.13 (a) To prove Eq. (13.20), consider the fractional-rate sampling rate converter of
Figure 13.16(b) with internal variables labeled as shown below:
x[n]
L
x u[n]
H(z)
v[n]
M
y[n]
Analysis yields x u [ Ln] = x[ n], n = 0, ± 1, ± 2,K and v[ n] =
Substituting the first equation in the second we get v[ n] =
∞
∑ h[n − l]xu [l].
l = −∞
∞
∑ h[n − Lm]x[m]. Finally,
m = −∞
y[ n] = v[ Mn] =
∞
∑ h[ Mn − Lm]x[m].
m = −∞
Not for sale
503
(b) Next, to prove Eq. (13.21), we make use of the z-domain relations of the downsampler and the up-sampler. From Eq. (13.17) we have
Y ( z) =
M −1
∑
1
− k ) X ( z1 / M W − k ). But X ( z ) = X ( z L ). Hence,
H ( z1 / M WM
u
u
M
M k =0
M −1
∑
1
− k ) X ( z L / M W − Lk ).
Y (z) =
H ( z1 / M WM
M
M k =0
13.14
x[n]
E 00 (z)
2
+
3
_
z1
E 01 (z)
_
z1
+
3
_1
z
2
E 02 (z)
3
E 10 (z)
3
+
_
z1
+
y[n]
_1
z
E 11 (z)
3
+
_
z1
E 12 (z)
3
13.15
x[n]
8
400 Hz
x u [n]
v[n ]
H(z)
3200 Hz
15
y[n]
213.3333 Hz
3200 Hz
(a) FT = 400 Hz, L = 8, M = 15. Now, the sampling rate of x u [n] and v[n] is
400L = 400 × 8 = 3.2 kHz. Hence, the sampling rate of y[n] is 3200 / M = 3200 / 15
= 213.33 Hz.
(b) The normalized stopband edge angular frequency of H (z ) (for no aliasing)
1
π
⎛π π ⎞ π
Hz.
ωs = min⎜ , ⎟ =
= . Hence, the stopband edge frequency is Fs =
30
⎝ L M ⎠ M 15
13.16
x[n]
650 Hz
8
x u [n]
3.25 kHz
H(z)
v[n ]
3.25 kHz
Not for sale
15
y[n]
361.1 Hz
504
(a) FT = 650 Hz, L = 5, M = 9. Now, the sampling rate of x u [n] and v[n] is
650L = 650 × 5 = 3.25 kHz. Hence, the sampling rate of y[n] is 3250 / M = 3250 / 9
= 361.1 Hz.
(b) The normalized stopband edge angular frequency of H (z ) (for no aliasing)
π
⎛π π ⎞ π
= . Hence, the stopband edge frequency is Hz.
ωs = min ⎜ , ⎟ =
⎝L M⎠ M 9
13.17 Applying the transpose operation to the M-channel analysis filter bank shown below
on the left-hand side, we arrive at the M-channel synthesis filter bank shown below on
the right-hand side.
x[n]
H0 (z)
M
v 0[n]
H1 (z)
M
v 1[n]
H M _1(z)
M
vM _ 1[n]
y[n]
+
H0 (z)
M
v 0[n]
+
H1 (z)
M
v 1[n]
H M _1(z)
M
vM _ 1[n]
v 0[n]
M
H0 (z)
+
v 1[n]
M
H1 (z)
+
vM _ 1[n]
M
H M _1(z)
y[n]
13.18 Specifications for H(z) are: Fp = 180 Hz, Fs = 200 Hz, δ p = 0.002, δs = 0.001.
H(z)
12 kHz
H (z) =
30
12 kHz 400 Hz
I ( z)F ( z 5 )
F(z5 )
I(z)
12 kHz
I(z)
F(z5 )
I(z)
5
30
5
6
F(z)
12 kHz 2.4 kHz
6
2.4 kHz
400 Hz
Specifications for F(z) are: Fp = 900 Hz, Fs = 1000 Hz, δ p = 0.001, δs = 0.001.
Not for sale
505
100
. Using Eq. (10.3) we arrive at the order of F(z) given by
12000
− 20 log10 0.001 × 0.001 − 13
NF =
= 386.3 ⇒ N F = 387
⎛ 100 ⎞
14.6⎜
⎟
⎝ 12000 ⎠
Specifications for I(z) are: Fp = 180 Hz, Fs = 2200 Hz, δ p = 0.001, δs = 0.001.
Here ∆f =
2020
. Using Eq. (10.3) we arrive at the order of I(z) given by
12000
− 20 log10 0.001 × 0.001 − 13
NI =
= 19.12 ⇒ N F = 207
⎛ 2020 ⎞
14.6⎜
⎟
⎝ 12000 ⎠
2400
12000
Hence, R M , F = (387 + 1)
= 155,200 mps, R M , I = (20 + 1)
= 50,400 mps.
6
5
The above realization requires a total of 205,600 mps. As a result, the computational
complexity is slightly higher than in Example 13.10.
Here ∆f =
13.19 Specifications for H(z) are: Fp = 180 Hz, Fs = 200 Hz, δ p = 0.002, δs = 0.001.
H ( z ) = I ( z )F ( z 3 )
F(z3 )
I(z)
12 kHz
I(z)
F(z3 )
I(z)
3
12 kHz
30
3
10
F(z)
4 kHz
10
4 kHz
400 Hz
Specifications for F(z) are: Fp = 540 Hz, Fs = 600 Hz, δ p = 0.001, δs = 0.001.
60
Here ∆f =
. Using Eq. (10.3) we arrive at the order of F(z) given by
12000
− 20 log10 0.001 × 0.001 − 13
NF =
= 643.8 ⇒ N F = 644
⎛ 60 ⎞
14.6⎜
⎟
⎝ 12000 ⎠
Specifications for I(z) are: Fp = 180 Hz, Fs = 3800 Hz, δ p = 0.001, δs = 0.001.
3260
. Using Eq. (10.3) we arrive at the order of I(z) given by
12000
− 20 log10 0.001 × 0.001 − 13
NI =
= 11.85 ⇒ N F = 12
⎛ 3260 ⎞
14.6⎜
⎟
⎝ 12000 ⎠
Here ∆f =
Not for sale
506
4000
12000
= 262,000 mps, R M , I = (12 + 1)
= 52,000 mps.
10
3
The above realization requires a total of 314,000 mps. As a result, the computational
complexity is higher than in Example 13.10 and that in Problem 13.18.
Hence, R M , F = (644 + 1)
40000
= 20. The general structure of
2,000
13.20 (a) The desired down-sampling factor is M =
the desired decimator is thus as shown below:
H(z)
40 kHz
20
2 kHz
40 kHz
Now, the normalized stopband edge angular frequency of a factor-of-20 decimator is
π
. Hence, the desired stopband edge frequency in this case is
ωs =
20
20000
Fs =
= 1000 Hz. The specifications of the decimation filter H(z) is thus as
20
200
follows: Fp = 800 Hz, Fs = 1000 Hz, δ p = 0.002, δs = 0.002. Here ∆f =
.
40000
Using Eq. (10.3) we arrive at the order of H(z) given by
− 20 log10 0.002 × 0.002 − 13
NH =
= 561.4 ⇒ 562. Therefore, the computational
⎛ 200 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
40000
complexity is given by R M , H = (562 + 1)
= 1126,000 mps.
20
(b) For a two-stage realization of the decimator, there are 4 possible realizations of the
decimation filter:
Realization #1 – H ( z ) = F ( z 2 ) I ( z )
F(z 2)
I(z)
40 kHz
40 kHz
I(z)
40 kHz
2
40 kHz
F(z)
2
40 kHz
20 kHz
10
10 kHz
2 kHz
10
20 kHz
2 kHz
Specifications for F (z ) and I (z ) are as follows:
400
.
40000
18200
I ( z) : Fp = 800 Hz, Fs = 19,000 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
.
40000
Orders of F (z ) and I (z ) are given by
F ( z) : Fp = 1600 Hz, Fs = 2000 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
Not for sale
507
− 20 log10 0.001 × 0.002 − 13
= 301.29 ⇒ 302
⎛ 400 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
− 20 log10 0.001 × 0.002 − 13
NI =
= 6.62 ⇒ 7
⎛ 18200 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
Computational complexities of the two sections are:
20000
40000
R M , F = (302 + 1)
= 606,000 mps and R M , I = (7 + 1)
= 160,000 mps.
10
2
Hence, the total computational complexity of the two-stage realization is
R M = R M , F + R M , I = 766,000 mps.
NF =
Realization #2 – H ( z ) = F ( z 4 ) I ( z )
F(z 4)
I(z)
40 kHz
40 kHz
I(z)
40 kHz
4
40 kHz
F(z)
4
40 kHz
10 kHz
5
10 kHz
2 kHz
5
10 kHz
2 kHz
Specifications for F (z ) and I (z ) are as follows:
800
.
40000
8200
I ( z) : Fp = 800 Hz, Fs = 9,000 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
.
40000
Orders of F (z ) and I (z ) are given by
F ( z ) : Fp = 3200 Hz, Fs = 4000 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
− 20 log10 0.001 × 0.002 − 13
= 150.65 ⇒ 151
⎛ 8000 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
− 20 log10 0.001 × 0.002 − 13
NI =
= 14.69 ⇒ 15
⎛ 8200 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
Computational complexities of the two sections are:
10000
40000
R M , F = (151 + 1)
= 304,000 mps and R M , I = (15 + 1)
= 160,000 mps.
5
4
Hence, the total computational complexity of the two-stage realization is
R M = R M , F + R M , I = 464,000 mps.
NF =
Realization #3 – H ( z ) = F ( z 5 ) I ( z )
Not for sale
508
F(z 5)
I(z)
40 kHz
40 kHz
40 kHz
I(z)
4 kHz
F(z)
5
8 kHz
40 kHz
40 kHz
4
5
2 kHz
4
8 kHz
2 kHz
Specifications for F (z ) and I (z ) are as follows:
F ( z ) : Fp = 4000 Hz, Fs = 5000 Hz, δ p = 0.001, δs = 0.002, and thus,
∆f =
1000
.
40000
I ( z) : Fp = 800 Hz, Fs = 7,000 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
6200
.
40000
Orders of F (z ) and I (z ) are given by
− 20 log10 0.001 × 0.002 − 13
= 120.52 ⇒ 121
⎛ 1000 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
− 20 log10 0.001 × 0.002 − 13
NI =
= 19.44 ⇒ 20
⎛ 6200 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
Computational complexities of the two sections are:
8000
40000
R M , F = (121 + 1)
= 244,000 mps and R M , I = (20 + 1)
= 168,000 mps.
4
5
Hence, the total computational complexity of the two-stage realization is
R M = R M , F + R M , I = 412,000 mps.
NF =
Realization #4 – H ( z ) = F ( z 10 ) I ( z )
I(z)
40 kHz
40 kHz
I(z)
40 kHz
F(z 10 )
40 kHz
4 kHz
F(z)
10
40 kHz
2
10
4 kHz
2 kHz
2
4 kHz
2 kHz
Specifications for F (z ) and I (z ) are as follows:
2000
.
40000
2200
I ( z) : Fp = 800 Hz, Fs = 3,000 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
.
40000
Orders of F (z ) and I (z ) are given by
F ( z) : Fp = 8000 Hz, Fs = 10,000 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
Not for sale
509
− 20 log10 0.001 × 0.002 − 13
= 60.26 ⇒ 61
⎛ 2000 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
− 20 log10 0.001 × 0.002 − 13
NI =
= 54.78 ⇒ 55
⎛ 2200 ⎞
14.6⎜
⎟
⎝ 40000 ⎠
Computational complexities of the two sections are:
4000
40000
R M , F = (61 + 1)
= 124,000 mps and R M , I = (55 + 1)
= 224,000 mps.
2
10
Hence, the total computational complexity of the two-stage realization is
R M = R M , F + R M , I = 348,000 mps.
NF =
Hence, the optimum two-stage design with the lowest computational complexity is the
Realization #4.
13.21 (a) The desired up-sampling factor is L =
24000
= 50. The general structure of the
480
desired interpolator is thus as shown below:
H(z)
50
480 Hz
24 kHz
24 kHz
Now, the normalized stopband edge angular frequency of a factor-of-50 interpolator is
π
. Hence, the desired stopband edge frequency in this case is
ωs =
50
12000
Fs =
= 240 Hz. The specifications of the decimation filter H(z) is thus as
50
50
follows: Fp = 190 Hz, Fs = 240 Hz, δ p = 0.002, δs = 0.002. Here ∆f =
.
24000
Using Eq. (10.3) we arrive at the order of H(z) given by
− 20 log10 0.002 × 0.002 − 13
NH =
= 1347.27 ⇒ 1348.
⎛ 50 ⎞
14.6⎜
⎟
⎝ 24000 ⎠
24000
Computational complexity is thus R M , H = (1348 + 1)
= 647,520 mps.
50
(b) H ( z ) = F ( z10 ) I ( z ).
Specifications for F (z ) and I (z ) are as follows:
500
F ( z) : Fp = 1900 Hz, Fs = 2400 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
.
24000
Not for sale
510
50
480 Hz
F(z 10 )
24 kHz
I(z)
24 kHz
F(z)
5
480 Hz 2400 Hz
24 kHz
I(z)
10
2400 Hz 24 kHz
24 kHz
I ( z) : Fp = 190 Hz, Fs = 2160 Hz, δ p = 0.001, δs = 0.002, and thus, ∆f =
1970
.
24000
Orders of F (z ) and I (z ) are given by
− 20 log10 0.001 × 0.002 − 13
= 144.62 ⇒ 145
⎛ 500 ⎞
14.6⎜
⎟
⎝ 24000 ⎠
− 20 log10 0.001 × 0.002 − 13
NI =
= 36.71 ⇒ 37
⎛ 1970 ⎞
14.6⎜
⎟
⎝ 24000 ⎠
Computational complexities of the two sections are:
2400
24000
R M , F = (145 + 1)
= 70,080 mps and R M , I = (37 + 1)
= 91,200 mps.
5
10
Hence, the total computational complexity of the two-stage realization is
R M = R M , F + R M , I = 161,280 mps.
NF =
Therefore, the complexity in a two-stage design with H ( z ) = F ( z10 ) I ( z ). is
approximately 25% of that of the single-stage design.
13.22 A computationally efficient realization of a factor-of-3 interpolator as shown below
3
H(z)
is obtained from the 3-band polyphase decomposition of H(z) given by
H ( z) = E 0 ( z 3 ) + z −1E1 ( z 3 ) + z −2 E 2 ( z 3 ). The general form of the polyphase
representation of the interpolator is as shown below:
E 0(z)
3
+
_
z 1
E 1(z)
3
+
_
z 1
E 2(z)
Not for sale
3
511
Since H(z) is a length-15 linear-phase transfer function, H ( z ) = h[ 0] + h[1]z −1
+ h[2]z −2 + h[3]z −3 + h[ 4]z −4 + h[5]z −5 + h[6]z −6 + h[7]z −7 + h[6]z −8 + h[5]z −9
+ h[ 4]z −10 + h[3]z −11 + h[2]z −12 + h[1]z −13 + h[0]z −14 , the transfer functions of the
sub-filters are as follows:
E 0 ( z) = h[0] + h[3]z −1 + h[6]z −2 + h[5]z −3 + h[2]z −4 ,
E1 ( z ) = h[1] + h[ 4]z −1 + h[ 7]z −2 + h[ 4]z −3 + h[1]z −4 ,
E 2 ( z ) = h[ 2] + h[ 5]z −1 + h[6]z −2 + h[3]z −3 + h[ 0]z −4 .
A computationally efficient realization of the factor-of-3 interpolator is obtained by
sharing common multipliers as shown below:
h[2]
_
z 1
+
_
z 1
+
_
z 1
_
z 1
+
+
3
h[5]
+
y[n]
_
z 1
h[6]
+
h[3]
h[0]
x[n]
_
z 1
_
z 1
+
_
z 1
+
_
z 1
+
_
z 1
+
3
_
z 1
+
_
z 1
+
_
z 1
+
_
z 1
+
3
h[4]
h[1]
h[7]
13.23 A computationally efficient realization of a factor-of-4 decimator as shown below
H(z)
4
is obtained from the 4-band polyphase decomposition of H(z) given by
H ( z ) = E 0 ( z 3 ) + z −1E1 ( z 3 ) + z −2 E 2 ( z 3 ) + z −3 E 3 ( z 3 ). The general form of the
polyphase representation of the interpolator is as shown below:
Not for sale
512
4
E0 (z)
+
4
E 1(z)
+
4
E2 (z)
+
4
E3 (z)
_1
z
_1
z
_1
z
Since H(z) is a length-16 linear-phase transfer function, H ( z ) = h[ 0] + h[1]z −1
+ h[2]z −2 + h[3]z −3 + h[ 4]z −4 + h[5]z −5 + h[6]z −6 + h[7]z −7 + h[7]z −8 + h[6]z −9
+ h[5]z −10 + h[ 4]z −11 + h[3]z −12 + h[2]z −13 + h[1]z −14 + h[0]z −15 , the transfer
functions of the sub-filters are as follows:
E 0 ( z ) = h[0] + h[ 4]z −1 + h[7]z −2 + h[3]z −3 ,
E1 ( z ) = h[1] + h[ 5]z −1 + h[6]z −2 + h[ 2]z −3 ,
E 2 ( z ) = h[ 2] + h[6]z −1 + h[ 5]z −2 + h[1]z −3 .
E 3 ( z) = h[3] + h[7]z −1 + h[ 4]z −2 + h[0]z −3 .
A computationally efficient realization of the factor-of-4 decimator is obtained by
sharing common multipliers as shown below
h[7]
+
4
_
z1
_
z1
_
z1
_
z1
h[4]
+
_
z1
_1
z
_
z1
+
_
z1
h[0]
+
+
_
z1
h[3]
+
4
+
4
_1
z
_1
h[5]
_1
z
+
z
h[6]
+
+
_
z1
_
z1
+
_
z1
h[1]
+
+
h[2]
+
4
13.24 H ( z ) =
N −1
∑ z − i = (1 + z −1 ) + (z − 2 + z − 3 ) + L + (z − ( N − 2) + z − ( N −1) )
i=0
Not for sale
513
= (1 +
z −1 )(1 + z −2
+
z −2
+L+
z −( N − 2) )
= (1 +
z −1 )G ( z 2 ),
F ( z) =
( N / 4) −1
z −i .
∑
∑
i=0
Using a similar technique we can show that G ( z ) = (1 +
can write H ( z ) = (1 +
where G ( z ) =
( N / 2) −1
z −i .
⎛ ( N / 4 ) −1 ⎞
z − 2i ⎟. Therefore we
⎜
⎟
⎝ i=0
⎠
z −1 )⎜
∑
⎛ ( N / 4) −1 ⎞
z − 4i ⎟ = (1 + z −1 )(1 + z − 2 )F ( z 4 ), where
⎜
⎟
⎝ i=0
⎠
z −1 )(1 + z − 2 )⎜
∑
Continuing this decomposition process further we arrive at
i=0
K −1
H ( z ) = (1 + z −1 )(1 + z − 2 ) L (1 + z − 2
), where N = 2 K .
The transfer function of a box-car decimation filter of length-16 can be expressed as:
H (z) =
15
∑
z −i =
i=0
1 − z −16
1 − z −1
.
As a result, a computationally efficient realization of a factor-of-16 decimator using a
length-16 boxcar decimation filter is as shown below:
+
+
16
_
z1
_
z1
13.25 Let u[n] denote the output of the factor-of-L interpolator. Then
∞
∑ (u[n] − u[n − 1])2
E = n = −∞
,
∞
(13-1)
∑ u 2 [ n]
n = −∞
and
∞
∑ u[n]u[n − 1]
C = n = −∞
∞
.
(13-2)
∑ u 2 [ n]
n = −∞
Substituting Eq. (13-2) in Eq. (13-1) we get E = 2(1 − C ). Hence, as C → 1, i.e., as the
signal u[n] becomes highly correlated, E → 0.
∞
∑
1
Now, by Parsevals’relation,
u[ n]v[ n] =
2π
n = −∞
Not for sale
π
∫ U (e jω ) V * (e jω )dω, where U (e jω )
−π
514
and V (e jω ) are the DTFTs of u[n] and v[n] , respectively. If we let v[ n] = u[ n − 1] in
the numerator of Eq. (13-1), and v[ n] = u[ n] in the denominator of Eq. (13-1), then we
can write
E=
1
2π
π
∫
U (e jω )
2
π
−π
1
2π
∫ U ( e jω )
e jω dω
= 0
π
∫ U ( e jω )
2
2
cos(ω) dω
,
π
∫ U (e jω )
dω
−π
2
dω
0
assuming u[n] to be a real sequence. If x[n] is assumed to be a broadband signal with
a flat magnitude spectrum, i.e., X (e jω ) = 1 for 0 ≤ ω ≤ π, then the magnitude
spectrum of is bandlimited to the range 0 ≤ ω ≤ π / L, i.e.,
π/L
∫ cos(ω)dω
⎧1, 0 ≤ ω < π / L,
Therefore, C = 0
U ( e jω ) = ⎨
π/L
0
,
otherwise.
⎩
dω
∫
=
sin(π / L )
. Hence, as
(π / L )
0
L → ∞ , C → 1.
13.26
X(e jω )
M
W(e jω )
H(z)
R(e jω)
–
z L
S(e jω )
M
Y(e jω)
Analysis of the above structure yields W (e jω ) = X (e jωM ),
R (e jω ) = H (e jω ) X (e jωM ), S (e jω ) = e − jωL R(e jω ) = e − jωL H (e jω ) X (e jωM ),
Y (e
jω
1
)=
M
M −1
∑ S (e
− jωk / M
e jω / M ). If the filter H (e jω ) is assumed to be close to
k =0
an ideal lowpass filter with a cutoff at ω / M , we can assume that all images of
X (e jω ) are suppressed leaving only the term in the expression for Y (e jω ). Hence, we
1
1
can write Y (e jω ) =
S ( e jω / M ) =
H (e jω / M )e − jωL / M X (e jω ). Since H (z ) is a
M
M
Type 1 FIR filter with exact linear phase and a delay of ( N − 1) / 2 = KM samples and a
magnitude response equal to M in the passband, we have
Y (e jω ) = e − jωK e − jωL / M X (e jω ). Thus, the structure of Figure P13.7 Is
approximately an allpass filter with a fixed delay of K samples and a variable
noninteger delay of L/M samples.
13.27 An ideal M-th band lowpass filter H (z ) is characterized by a frequency response
Not for sale
515
1, − π / M ≤ ω ≤ π / M ,
H (e jω ) = ⎧⎨
The transfer function H (z ) can be expressed in
otherwise.
⎩0,
M −1
∑z
an M-branch polyphase form as H ( z ) =
−k
H k ( z M ). From the above we observe
k =0
M −1
∑
H ( zWMr ) = M H 0 ( z M ). Therefore, H 0 (e jωM ) =
r =0
Or in other words, H 0 ( z
M
M −1
∑ H (e
1
M
j ( ω − 2 πr / M
r =0
)=
1
.
M
) is an allpass function.
13.28 An equivalent realization of the structure of Figure P13.38 obtained by realizing the
filter in a Type 1 polyphase form is shown below on the left. By moving the downsampler through the system and invoking the cascade equivalence #1 of Figure 13.14 we
arrive at the structure shown below on the right.
E 0(z L )
L
L
+
L
L
E 0(z)
+
L
E 1(z)
+
L
E 2 (z)
+
L
E L _ 1 (z)
_
z1
_
z1
E 1(z L )
+
_
z1
_
z1
E 2 (z L )
+
_
z1
_
z1
E L _ 1 (z L )
The structure on the right hand side reduces to the one shown below on the left from
which we arrive at the simplified equivalent structure shown below on the right.
L
13.29 (a) H ( z ) =
N −1
∑
h[ n]z − n .
L
( N / 2 ) −1
Let H 0 ( z ) =
n=0
( N / 2) −1
H1 ( z ) =
E0 (z)
E0 (z)
∑ (h[2i] + h[2i + 1])z − 2i
and
i=0
∑ (h[2i] − h[2i + 1])z − 2i . Then
i=0
(1 + z −1 )H 0 ( z 2 ) + (1 − z −1 )H 1( z 2 ) =
( N / 2 ) −1
∑
h[2i ]z − 2i +
i=0
−
1
2
−
1
(b) H ( z) = (1 + z )H 0 ( z ) + (1 − z )H 1( z 2 )
Not for sale
( N / 2) −1
∑ h[2i + 1]z − 2i + 1 = H (z).
i=0
516
(
)
(
)
= H 0 ( z 2 ) + H1 ( z 2 ) + z −1 H 0 ( z 2 ) − H1 ( z 2 ) = E 0 ( z 2 ) + z −1E1 ( z 2 ). Therefore,
E 0 ( z ) = H 0 ( z ) + H 1( z ) and E1 ( z ) = H 0 ( z ) − H 1( z ).
[
]
[
]
⎡ H ( z 2 ) + H1 ( z 2 )⎤
⎡ H ( z 2 )⎤
(c) Now, H ( z ) = 1 z −1 ⎡1 1 ⎤ ⎢ 0 2 ⎥ = 1 z −1 ⎢ 0 2
2 ⎥
⎢⎣1 − 1⎥⎦ H ( z )
⎦
⎣ 1
⎣ H 0 ( z ) − H1 ( z ) ⎦
(
)
(
)
= H 0 ( z 2 ) + H1 ( z 2 ) + z −1 H 0 ( z 2 ) − H1 ( z 2 ) = (1 + z −1 )H 0 ( z 2 ) + (1 − z −1 )H1 ( z 2 ).
(d) If L = 2, i.e., N = 2 2 , then we can express
H 0 ( z 2 ) = (1 + z −2 )H 00 ( z 4 ) + (1 − z −2 )H 01 ( z 4 ) and
H1 ( z 2 ) = (1 + z −2 )H10 ( z 4 ) + (1 − z −2 )H11 ( z 4 ). Substituting these expressions in
H ( z) = (1 + z −1 )H 0 ( z 2 ) + (1 − z −1 )H1 ( z 2 ) we get
[
H ( z ) = (1 + z −1 ) (1 + z − 2 )H 00 ( z 4 ) + (1 − z − 2 )H 01 ( z 4 )
[
]
+ (1 − z −1 ) (1 + z − 2 )H10 ( z 4 ) + (1 − z − 2 )H11 ( z 4 )
]
= (1 + z −1 )(1 + z −2 )H 00 ( z 4 ) + (1 + z −1 )(1 − z −2 )H 01 ( z 4 )
+ (1 − z −1 )(1 + z −2 )H10 ( z 4 ) + (1 − z −1 )(1 − z −2 )H11 ( z 4 )
⎡ H ( z 4 )⎤
1
1 ⎤ ⎢ 00
⎡1 1
⎥
H 01( z 4 ) ⎥
−
−
1
1
1
1
⎢
⎥
−
−
−
1
2
3
⎢
=1 z
= 1 z −1 z − 2
z
z
⎢1 1 − 1 − 1⎥ ⎢ H ( z 4 ) ⎥
⎢⎣1 − 1 − 1 1 ⎥⎦ ⎢ 10 4 ⎥
⎣ H 11( z ) ⎦
Continuing this process it is easy to establish that for we have
⎡ Hˆ 0 ( z L ) ⎤
⎢ ˆ L ⎥
H ( z) = 1 z −1 L z − ( L −1) R L ⎢ H 1( z ) ⎥ .
M
⎢
⎥
⎢⎣ Hˆ L −1( z L )⎥⎦
[
]
[
[
[
13.30 Now H ( z) = 1 z −1
z−2
⎡ Hˆ 0 ( z 4 )⎤
⎢ˆ 4 ⎥
H (z )
−
3
z R 4 ⎢ 1 4 ⎥.
⎢ Hˆ 2 ( z )⎥
⎢ˆ
4 ⎥
⎣ H 3( z ) ⎦
]
]
⎡ Hˆ 0 ( z 4 )⎤
⎢ˆ 4 ⎥
H (z )
z − 3 R 4 ⎢ 1 4 ⎥ = 1 z −1
⎢ Hˆ 2 ( z )⎥
⎢ˆ
4 ⎥
⎣ H 3( z )⎦
]
[
z−2
⎡ E 0 ( z 4 )⎤
⎥
⎢
E (z 4 )
z − 3 ⎢ 1 4 ⎥.
⎢ E 2 ( z )⎥
⎢
4 ⎥
⎣ E 3 ( z )⎦
]
⎡ Hˆ 0 ( z )⎤
⎡ E 0 ( z )⎤
⎡ E 0 ( z )⎤
1
1 ⎤ ⎡ E 0 ( z )⎤
⎡1 1
⎥
⎢ ˆ
⎢
⎥
⎢
⎥
1
1
E
z
E
z
H
z
(
)
(
)
(
)
−
−
1
1
1
1⎥ ⎢ E 1( z ) ⎥.
Therefore, ⎢ 1 ⎥ = R −4 1 ⎢ 1 ⎥ = R 4 ⎢ 1 ⎥ = ⎢
ˆ
⎢
−
−
1
1
1
1⎥ ⎢ E ( z )⎥
E ( z)
E ( z)
⎢ H 2 ( z )⎥
⎢ 2 ⎥ 4
⎢ 2 ⎥ 4 ⎢1 − 1 − 1 1 ⎥ ⎢ 2 ⎥
⎣
⎦ ⎣ E 3 ( z)⎦
⎢ Hˆ ( z )⎥
⎣ E 3 ( z)⎦
⎣ E 3 ( z)⎦
⎣ 3 ⎦
A length-16 Type 1 linear-phase FIR transfer function is of the form
H ( z) =h 0 + h1 z −1 + h 2 z −2 + h 3 z −3 + h 4 z −4 + h 5 z −5 + h 6 z −6 + h 7 z −7 + h 7 z −8 + h 6 z −9
Not for sale
517
+ h 5 z −10 + h 4 z −11 + h 3 z −12 + h 2 z −13 + h1 z −14 + h 0 z −15 .
Hence, E 0 ( z) = h 0 + h 4 z −1 + h 7 z −2 + h 3 z −3 , E1 ( z) = h1 + h 5 z −1 + h 6 z −2 + h 2 z −3 ,
E 2 ( z) = h 2 + h 6 z −1 + h 5 z −2 + h1 z −3 , E 3 ( z) = h 3 + h 7 z −1 + h 4 z −2 + h 0 z −3 . Thus,
Hˆ ( z) = g + g z −1 + g z −2 + g z −3 , Hˆ ( z) = g + g z −1 − g z −2 − g z −3 ,
0
0
1
1
0
1
2
3
3
2
Hˆ 2 ( z) = g 4 + g 5 z −1 − g 5 z −2 − g 4 z −3 , Hˆ 3 ( z) = g 6 + g 7 z −1 + g 7 z −2 + g 6 z −3 , where
1
1
1
g 0 = (h0 + h1 + h2 + h3 ), g1 = (h4 + h5 + h6 + h7 ), g 2 = (h0 − h1 + h2 − h3 ),
4
4
4
1
1
1
g3 = (h4 − h5 + h6 − h7 ), g 4 = (h0 + h1 − h2 − h3 ), g 5 = (h4 + h5 − h6 − h7 ),
4
4
4
1
1
g6 = (h0 − h1 − h2 + h3 ), g 7 = (h4 − h5 − h6 + h7 ). Note that Hˆ 0 ( z) and Hˆ 3 ( z )
4
4
are Type 1 linear-phase FIR transfer functions, whereas, Hˆ 1 ( z ) and Hˆ 2 ( z ) are Type 2
linear-phase FIR transfer functions. A computationally efficient realization of a factorof-4 decimator using a four-band structural subband decomposition of the decimation
filter H (z ) is shown below:
M
^
H0 (z)
+
M
^
H1 (z)
+
M
^
H 2 (z)
+
M
^
H 3 (z)
_
z1
_1
z
R4
_
z1
Because of the symmetry or anti-symmetry in the impulse responses of the subband
filters, each subband filter can be realized using only 2 multipliers. Hence, the final
realization uses only 8 multipliers. Note also that by delay-sharing, the total number of
delays in implementing the four subband filters can be reduced to 3.
13.31 y[ n] = P− 2 (α ) x[ n − 2] + P−1 (α ) x[ n − 1] + P0 (α ) x[ n] + P1 (α ) x[ n + 1] + P2 (α ) x[ n + 2]
(α + 1)α(α − 1)(α − 2)
1
where P− 2 (α ) =
= (α 4 − 2α 3 − α 2 + 2α ),
(−2 + 1)(−2)(−2 − 1)(−2 − 2) 24
(α + 2)α(α − 1)(α − 2)
1
P−1 (α ) =
= − (α 4 − α 3 − 4α 2 + 4α ),
6
(−1 + 2)(−1)(−1 − 1)(−1 − 2)
(α + 2)(α + 1)(α − 1)(α − 2) 1 4
P0 (α ) =
= (α − 5α 2 + 4),
(0 + 2)(0 + 1)(0 − 1)(0 − 2) 4
Not for sale
518
(α + 2)(α + 1)α(α − 2)
1
= − (α 4 + α 3 − 4α 2 − 4α ),
6
(1 + 2)(1 + 1)(1 − 0)(1 − 2)
(α + 2)(α + 1)α(α − 1)
1
= (α 4 + 2α 3 − α 2 − 2α ).
P2 (α ) =
24
(2 + 2)(2 + 1)(2 − 0)(2 − 1)
P1 (α ) =
We consider the computation of y[ n], y[ n + 1], y[ n + 2], y[ n + 3] using 5 input samples:
x[ n − 2] through x[ n + 2].
For α 0 = 0, P− 2 (α 0 ) = 0, P−1 (α 0 ) = 0, P0 (α 0 ) = 1, P1 (α 0 ) = 0, and P2 (α 0 ) = 0. For
α1 = 5 / 4, P− 2 (α1 ) = −0.022, P−1 (α1 ) = 0.127, P0 (α1 ) = −0.3428, P1(α1) = 1.1426,
and P2 (α1 ) = 0.0952.
For α 2 = 10 / 4, P− 2 (α 2 ) = 0.2734, P−1 (α 2 ) = −1.4062, P0 (α 2 ) = 2.9531,
P1 (α 2 ) = −3.2812, and P2 (α 2 ) = 2.4609.
For α 3 = 15 / 4, P− 2 (α 3 ) = 3.5718, P−1 (α 3 ) = −17.2949, P0 (α 3 ) = 32.86,
P1 (α 3 ) = −29.873, and P2 (α 3 ) = 11.7358.
The block filter implementation is thus given by
⎡ x[ n − 2]⎤
⎡ y[ n] ⎤ ⎡ 0
0
1
0
0 ⎤ ⎢ x[ n − 1] ⎥
⎢ y[ n + 1] ⎥ ⎢ − 0.022
− 0.3428 1.1426
0.127
0.0952 ⎥ ⎢
⎥. Another
⎢ y[ n + 2]⎥ = ⎢ 0.2734 − 1.4062
2.9531 − 3.2812 2.4609 ⎥ ⎢ x[ n] ⎥
⎥ ⎢
⎢
32.86
− 29.873 11.7358⎦⎥ ⎢ x[ n + 1] ⎥
⎣ y[ n + 3]⎦ ⎣ 3.5718 − 17.2949
⎣ x[ n + 2]⎦
implementation is given by
1
1
1
1
1
y[ n] = α 4 ⎛⎜ x[ n − 2] − x[ n − 1] + x[ n] − x[ n + 1] + x[ n + 2]⎞⎟
24
6
4
6
24
⎝
⎠
1
1
1
1
+ α 3 ⎛⎜ − x[ n − 2] + x[ n − 1] − x[ n + 1] + x[ n + 2]⎞⎟
6
6
12
⎝ 12
⎠
1
4
5
4
1
+ α 2 ⎛⎜ − x[ n − 2] + x[ n − 1] − x[ n] + x[ n + 1] − x[ n + 2]⎞⎟
24
6
4
6
24
⎝
⎠
1
4
4
1
+ α⎛⎜ x[ n − 2] − x[ n − 1] + x[ n + 1] − x[ n + 2]⎞⎟ + x[ n].
6
6
12
⎝ 12
⎠
The Farrow structure implementation of the interpolator is shown below:
x[n]
α
α
H3(z)
H2(z)
H1(z)
H0(z)
α
y[n]
α
where H 0 ( z) = z − 2 − z −1 + − z + z 2 , H1 ( z) = − z − 2 + z −1 + z − z 2 ,
6
24
6
4 6
24
12
6
24
1
1
1
1
1
Not for sale
1
1
1
1
519
H 2 ( z) = −
1 −2
z
24
+ z −1 −
4
6
5 4
1 2
+ z−
z ,
4 6
24
13.32 From Eq. (13.75), we have a 0 = − a 4
and H 3 ( z ) =
1
t4
t 42
1
t1
t12
1
t2
t 22
1
t3
t 32
t 43
t13
t 23
t 33
1
t0
t 02
1
t1
t12
1
t2
t 22
1
t3
t 32
t 03
t13
t 23
t 33
1 −2
z
12
− z −1 + z −
4
6
4
6
1 2
z .
12
. Both the numerator and the
denominator are determinants of Vandermonde matrices and have a nonzero value if
ti ≠ t j , i ≠ j. From the solution of Problem 6.28, we get
(t −t )(t −t )(t −t )(t −t )(t −t )(t −t )
(t −t )(t −t )(t −t )
a0 = a 4 1 4 2 4 3 4 2 1 3 1 3 2 = a 4 1 4 2 4 3 4 , or
(t 1−t 0 )(t 2 −t 0 )(t 3 −t 0 )(t 2 −t1 )(t 3 −t1 )(t 3 −t 2 )
(t 1−t 0 )(t 2 −t 0 )(t 3 −t 0 )
(t −t )(t −t )(t −t )
a0 = −a4 4 1 4 2 4 3 .
(t 0 −t1 )(t 0 −t 2 )(t 0 −t 3 )
13.33 From Eq. (13.74) we get a1 = −a 4
(t 4 −t 0 )(t 2 −t 0 )(t 3 −t 0 )(t 2 −t 4 )(t 3 −t 4 )(t 3 −t 2 )
(t 1−t 0 )(t 2 −t 0 )(t 3 −t 0 )(t 2 −t1 )(t 3 −t1 )(t 3 −t 2 )
(t 4 −t 0 )(t 2 −t 4 )(t 3 −t 4 )
. Substituting the value of a 4 given by Eq. (13.77) in
(t 1−t 0 )(t 2 −t1 )(t 3 −t1 )
1
the above we arrive at a1 =
. Likewise, from Eq. (13.74)
(t 1−t 0 )(t 1−t 2 )(t 1−t 3 )(t 1−t 4 )
(t −t )(t −t )(t −t )(t −t )(t −t )(t −t )
we get a2 = a 4 1 0 4 0 3 0 4 1 3 1 3 4
(t 1−t 0 )(t 2 −t 0 )(t 3 −t 0 )(t 2 −t1 )(t 3 −t1 )(t 3 −t 2 )
(t −t )(t −t )(t −t )
= a 4 4 0 4 1 3 4 . Substituting the value of a 4 given by Eq. (13.77) in the
(t 2 −t 0 )(t 2 −t1 )(t 3 −t 2 )
1
above we arrive at a 0 =
. Finally, from Eq. (13.74) we
(t 2 −t 0 )(t 2 −t1 )(t 2 −t 3 )(t 2 −t 4 )
(t −t )(t −t )(t −t )(t −t )(t −t )(t −t )
get a3 = −a 4 1 0 2 0 4 0 2 1 4 1 4 2
(t 1−t 0 )(t 2 −t 0 )(t 3 −t 0 )(t 2 −t1 )(t 3 −t1 )(t 3 −t 2 )
(t −t )(t −t )(t −t )
= −a 4 4 0 4 1 4 2 . Substituting the value of a 4 given by Eq. (13.77) in the
(t 3 −t 0 )(t 3 −t1 )(t 3 −t 2 )
1
above we arrive at a3 =
.
(t 3 −t 0 )(t 3 −t1 )(t 3 −t 2 )(t 3 −t 4 )
= −a4
13.34 t i = i, m ≤ i ≤ m + 4.
Not for sale
520
1
1
=
,
(m − m − 1)(m − m − 2)(m − m − 3)(m − m − 4) 24
1
1
a m +1 =
=− ,
(m + 1 − m)(m + 1 − m − 2)(m + 1 − m − 3)(m + 1 − m − 4)
6
1
1
am + 2 =
= ,
(m + 2 − m)(m + 2 − m − 1)(m + 2 − m − 3)(m + 2 − m − 4) 4
1
1
am + 3 =
=− ,
(m + 3 − m)(m + 3 − m − 1)(m + 3 − m − 2)(m + 3 − m − 4)
6
1
1
am + 4 =
= .
(m + 4 − m)(m + 4 − m − 1)(m + 4 − m − 2)(m + 4 − m − 3) 24
am =
( 3)
From Eq. (13.69), we have the expressions for Bm
(t ) given by
0,
t < m,
⎧
1
⎪
m ≤ t < m + 1,
(t − m) 3 ,
⎪
24
⎪
1
1
m + 1 ≤ t < m + 2,
(t − m) 3 − (t − m − 1) 3 ,
⎪
(3)
6
24
Bm
(t ) = ⎨
1
1
1
m + 2 ≤ t < m + 3,
(t − m) 3 − (t − m − 1) 3 + (t − m − 2) 3 ,
⎪
4
6
24
⎪1
3
3 1
3 1
3 1
⎪ (t − m) − (t − m − 1) + (t − m − 2) − (t − m − 3) , m + 3 ≤ t < m + 4,
6
4
6
24
⎪
0,
t ≥ m + 4.
⎩
( 3)
The normalized 3rd order B-spline is then given by β (m3) (t ) = ( m + 4 − m) Bm
(t )
0,
t < m,
⎧
1
⎪
3
m ≤ t < m + 1,
(t − m) ,
⎪
6
⎪
2
1
m + 1 ≤ t < m + 2,
(t − m) 3 − (t − m − 1) 3 ,
⎪
(3)
3
6
= 4 Bm (t ) = ⎨
2
1
m + 2 ≤ t < m + 3,
(t − m) 3 − (t − m − 1) 3 + (t − m − 2) 3 ,
⎪
3
6
⎪1
2
2
⎪ (t − m) 3 − (t − m − 1) 3 + (t − m − 2) 3 − (t − m − 3) 3 , m + 3 ≤ t < m + 4,
3
3
6
⎪
0
t ≥ m + 4.
,
⎩
Substituting t = 1 + α and evaluating β (m3) (t ) for m = −1, 0, 1 2, we have
β (−31) (α) = −
α3 α2 α 1
α3
2
+
− + , β 0(3) (α) =
+ α2 + ,
6
2
2 6
2
3
β1(3) (α) = −
α3 α2 α 1
α3
+
+ + , β 2(3) (α) =
.
2
2
2 6
6
2
Substituting back in Eq. (13.91), we have y[ n] =
β 3 (α) x[n + k ]
∑
= −1
( )
k
k
Not for sale
521
⎛ α3 α2 α 1 ⎞
⎛ α3
⎞
⎛ α3 α2 α 1 ⎞
2 2⎟
⎜
⎟
⎜
= −
+
− + x[n − 1] +
+ α + x[n] + ⎜ −
+
+ + ⎟ x[n + 1]
⎜ 6
⎟
⎜ 2
⎟
⎜ 2
2
2
6
3
2
2 6 ⎟⎠
⎝
⎠
⎝
⎠
⎝
⎛ α3 ⎞
⎟ x[n + 2] = ⎛⎜ 1 x[ n − 1] + 2 x[ n] + 1 x[ n] ⎞⎟ + ⎛⎜ − 1 x[ n − 1] + 1 x[ n + 1] ⎞⎟α
+⎜
⎜ 6 ⎟
3
6
2
⎠
⎝6
⎠ ⎝ 2
⎝
⎠
1
1
1
1
⎞
⎛ 1
⎞
⎛1
+ ⎜ x[n − 1] − x[ n] + x[ n + 1] ⎟α 2 + ⎜ − x[n − 1] + x[ n] − x[ n + 1] + x[ n + 2] ⎟α 3 .
2
2
2
6
⎠
⎝ 6
⎠
⎝2
In the z-domain, the input-output relation is thus given by
Y ( z ) = H 3 ( z ) + H 2 ( z )α + H1 ( z )α 2 + H 0 ( z )α 3 , where
1
1 1
1
1
1
1
1
H 0 ( z ) = − z −1 + − z + z 2 , H 1 ( z ) = z −1 − 1 + z , H 2 ( z ) = − z −1 + z ,
6
2 2
6
2
2
2
2
1 −1 2 1
H 3 ( z ) = z + + z. The corresponding Farrow structure is shown on top of the
6
3 6
next page:
x[n]
α
α
H3(z)
H2(z)
H1(z)
H0(z)
y[n]
α
13.35 For the factor-of-4/3 interpolator design, if we use cubic B-spline with uniformly
spaced knots at the problem reduces exactly to the design given in the solution of
Problem 13.34.
13.36 From Eq. (13.94) with k = 0 we have H ( z) = α +
L −1
∑ z − i Ei (z L ).
Substituting the
i =1
expression for on the left-hand side Eq. (13.97) we get INCOMPLETE
13.37 For a half-band zero-phase lowpass filter, the transfer function is of the form
H ( z ) = h[0] + z −1
∞
∑ h[2n]z − 2n , where h[0] = 2 .
1
If the half-band filter has a zero at
n = −∞
n≠0
z = −1, then H (−1) = h[0] −
∞
∑
h[2 n] = 0, or h[0] =
n = −∞
n≠0
∞
∑ h[2n].
n = −∞
n≠0
13.38 From Eq. (13.99), a zero-phase half-band filter H (z ) satisfies the condition
H ( z ) + H ( − z ) = a constant.
Not for sale
522
(a) The zero-phase equivalent here is given by H1 ( z ) = z + 2 + z −1 . Hence,
H1 ( z ) + H1 ( − z ) = z + 2 + z −1 − z + 2 − z −1 = 4. A plot of the scaled magnitude
response of H1 ( z) is given below:
H1(z)
1
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
(b) The zero-phase equivalent here is given by H 2 ( z ) = − z 3 + 9 z + 16 + 9 z −1 − z −3 .
Hence,
H 2 ( z ) + H 2 ( − z ) = − z 3 + 9 z + 16 + 9 z −1 − z −3 + z 3 − 9 z + 16 − 9 z −1 + z −3 = 32.
A plot of the scaled magnitude response of H 2 ( z) is given below:
H2(z)
1
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/ π
(c) The zero-phase equivalent here is given by
H 3 ( z ) = −3z 3 + 19z + 326 + 19z −1 − 3z −3 . Hence,
H 3 ( z) + H 3 (− z) = −3z 3 + 19z + 32 + 19z −1 − 3z −3 + 3z 3 − 19z + 32 − 19z −1 + 3z −3 = 64.
A plot of the scaled magnitude response of H 3 ( z) is given below:
H3(z)
1
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
523
(d) The zero-phase equivalent here is given by
H 4 ( z ) = 3z 5 − 25z 3 + 150 z + 256 + 150 z −1 − 25z −3 + 3z −5 . Hence, H 4 ( z) + H 4 (− z)
= 3z 5 − 25z 3 + 150z + 256 + 150z −1 − 25z −3 + 3z −5 − 3z 5 + 25z 3 − 150z + 256 − 150z −1
+ 25z −3 − 3z −5 = 512. A plot of the scaled magnitude response of H 4 ( z) is given
below:
H4(z)
1
Magnitude
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
13.39 (a) A function F (ω) of has p-th order zero at a frequency ω = ωi if
d p F (ω)
dω
p
Hence,
= 0. The function H (e jω ) has p zeros at cos ω = 1 , i.e., at ω = π .
ω = ωi
d p H ( e jω )
dω p
= 0. Moreover, the order of the highest power of
ω= π
(1 − cos ω) / 2 is p − 1. As a result,
d p −1 H ( e j ω )
dω p −1
= 0.
ω= 0
2
2
− jω ⎞
⎛ 1 + e − jω ⎞
⎛
1 + cos ω
⎟ and 1 − cos ω = −e jω ⎜ 1 − e
⎟ .
(b) Now,
= e jω ⎜
⎜
⎟
⎜
⎟
2
2
2
2
⎝
⎠
⎝
⎠
Substituting these expressions in Eq. (13.120) we arrive at
H (e
jω
)=e
⎛
⎜
⎝
jpω ⎜ 1 + e
− jω
2
p p −1
l
− jω ⎞
⎞
⎛ p − 1 + l ⎞(−e − jω ) l ⎛⎜ 1 − e
⎟ . Replacing with
⎟
⎜
⎟
⎜
⎟
⎟
l
2
⎝
⎠
⎝
⎠
⎠ l=0
∑
e jω in z the above we get the expression for the zero-phase transfer function as
⎛
H ( z) = z
⎜
⎝
p ⎜1+
z −1 ⎞⎟
2 ⎟⎠
p l −1
∑
l
l
−1
⎛ p − 1 + l ⎞(− z ) l ⎛⎜ 1 − z ⎞⎟ .
⎜
⎟
⎜ 2 ⎟
l
⎝
⎠
⎝
⎠
13.40 (a)
Not for sale
524
X(z)
_
z1
V0 (z)
_
1+z 1
V1 (z)
V2 (z)
2
2
2
W0 (z)
W1 (z)
H0 (z)
H0 (z) + H 1(z)
W2 (z)
H 1(z)
U0 (z)
U 1(z)
U 2(z)
2
R 0(z)
_
1_ z 1
2
R 1(z) _
z1
2
R 2(z) _
_
z 2_ z 1
+
Y(z)
⎡V0 ( z )⎤ ⎡ z −1 ⎤
Analysis of the above structure yields V( z) = ⎢ V1 ( z ) ⎥ = ⎢1 + z −1 ⎥ X ( z),
⎢V ( z )⎥ ⎢ 1 ⎥
⎥⎦
⎣ 2 ⎦ ⎢⎣
⎡ − z −1 / 2 ⎤
⎡W0 ( z )⎤ ⎡ z −1 / 2 ⎤
⎢
⎥
−
1
/
2
1
/
2
W( z) = ⎢ W1 ( z ) ⎥ = 1 + z
X (z
) + ⎢1 − z −1 / 2 ⎥ X ( z −1 / 2 ),
⎢
⎥
⎢
⎥
⎢W ( z )⎥
1
1
⎥⎦
⎢⎣
⎥⎦
⎣ 2 ⎦ ⎢⎣
⎤
⎡
⎤
− z −1 / 2 H 0 ( z )
z −1 / 2 H 0 ( z )
⎡U 0 ( z )⎤ ⎡
⎢
⎥
⎢
⎥
−
1
/
2
1
/
2
−
1
/
2
U( z) = ⎢U1 ( z) ⎥ = ⎢(1 + z
)(H 0 ( z) + H1 ( z ))⎥ X ( z ) + ⎢(1 − z
)(H 0 ( z ) + H1 ( z))⎥ X (− z1 / 2 ),
⎢U ( z )⎥
H1 ( z )
H1 ( z )
⎥
⎢
⎥
⎣ 2 ⎦ ⎢⎣
⎦
⎣
⎦
⎡
⎤
⎤
− z −1 H 0 ( z )
z −1 H 0 ( z 2 )
⎡ R0 ( z ) ⎤ ⎡
⎢
⎥
⎢
⎥
R( z) = ⎢ R1 ( z) ⎥ = ⎢(1 + z −1 ) H 0 ( z 2 ) + H1 ( z 2 ) ⎥ X ( z) + ⎢(1 − z −1 ) H 0 ( z 2 ) + H1 ( z 2 ) ⎥ X (− z).
⎢ R ( z )⎥
⎢
⎥
⎥
H1 ( z 2 )
H1 ( z 2 )
⎣ 2 ⎦ ⎢⎣
⎣
⎦
⎦
(
)
(
Y ( z ) = (1 − z −1 ) R0 ( z ) + z −1 R1 ( z ) + ( z −2 − z −1 ) R2 ( z )
[
(
)
[
(
)
= [2 z −1H 0 ( z 2 ) + 2 z − 2 H1 ( z 2 )]X ( z) = 2 z −1[ H 0 ( z 2 ) + z −1H1 ( z 2 )]X ( z).
)
]
= (1 − z −1 )z −1H 0 ( z 2 ) + (1 + z −1 )z −1 H 0 ( z 2 ) + H1 ( z 2 ) + ( z − 2 − z −1 )H1 ( z 2 ) X ( z)
+ − (1 − z −1 )z −1H 0 ( z 2 ) + (1 − z −1 )z −1 H 0 ( z 2 ) + H1 ( z 2 ) + ( z − 2 − z −1 )H1 ( z 2 ) X (− z)
]
Hence,
T ( z) = 2 z −1[ H 0 ( z 2 ) + z −1 H1 ( z 2 )].
1
1
1
⎡1
⎤
(b) T ( z ) = 2 z −1 ⎢ H ( z ) + H (− z ) + H ( z ) − H (− z )⎥ = 2 z −1 H ( z ).
2
2
2
⎣2
⎦
H
(
z
)
=
K
.
(c) Length of H 0 ( z ) = K and length of 1
F
(d) The total computational complexity of the above structure is 3K T
2
multiplications per second, where is the sampling frequency in Hz. On the other hand,
a direct implementation of H (z ) requires 2 KFT multiplications per second.
13.41
Not for sale
525
R(z)
X 1(z)
2
X 2(z)
Y 1(z)
2
Y 2(z)
z
+
2
2
_1
_
z1
Analysis yields R( z ) = z −1 X1 ( z 2 ) + X 2 ( z 2 ), Y 1( z ) = R( z1 / 2 ) + R( − z1 / 2 )
= [ z −1 / 2 X1 ( z ) + X 2 ( z )] + [ − z −1 / 2 X1 ( z ) + X 2 ( z )] = 2 X 2 ( z ),
Y 2( z ) = z −1 / 2 R( z1 / 2 ) − z −1 / 2 R( − z1 / 2 )
= [ z −1 X1 ( z ) + z −1 / 2 X 2 ( z )] + [ z −1 X1 ( z ) − z −1 / 2 X 2 ( z )] = 2 z −1 X1 ( z ). Thus, the output
y1[ n] is a scaled replica of the input x 2 [ n] while the output y2 [ n] is a scaled replica of
the delayed input x1[ n − 1].
13.42
X 1(z)
W(z)
2
–
z 1
X2 (z)
V(z)
H(z2)
2
Y 1(z)
2
Y 2(z)
–
z 1
2
Analysis yields W ( z ) = X1 ( z 2 ) + z −1 X 2 ( z 2 ),
V ( z ) = H ( z 2 ) X1 ( z 2 ) + z −1 H ( z 2 ) X 2 ( z 2 ),
1
Y1 ( z ) = V ( z1 / 2 ) + V (− z1 / 2 ) = H ( z ) X1 ( z ),
2
1
Y2 ( z ) = z −1 / 2V ( z1 / 2 ) − z −1 / 2V (− z1 / 2 ) = z −1 H ( z ) X 2 ( z ).
2
Y (z)
Y (z)
= z −1 H ( z). Hence, the system is time-invariant.
Therefore, 1 = H ( z), and 2
X 1( z)
X 2 ( z)
(
(
)
)
13.43
X 1(z)
H(z2)
2
–1
z
X 2(z)
2
–
z 1
2
2
Y1 (z)
Y2 (z)
Y 1( z )
Y (z)
= H ( z), and 2
= z −1 H ( z). Here now,
X 1( z)
X 2 ( z)
X 2 ( z) = Y1 (z), and hence, Y2 ( z ) = z −1 H ( z ) X 2 ( z ) = z −1 H ( z )Y1 ( z ) = z −1 H 2 ( z ) X1 ( z ).
Y (z)
Thus, 2 = z −1 H 2 ( z). Hence, the system is time-invariant.
X 1( z)
13.44
From the solution of Problem 13.42,
Not for sale
526
X 1(z)
W(z)
3
–
z 1
X2 (z)
V(z)
3
Y1 (z)
–
z 1
3
3
–
z 1
X 3(z)
H(z3)
–
z 1
3
3
Y2 (z)
Y3 (z)
–2
Y(z)
– (C+1)
z
3
Analysis yields W ( z) = X1 ( z 3 ) + z −1Y1 ( z 3 ) + z −2 X 3 ( z 3 ),
V ( z) = H ( z 3 )W ( z ) = H ( z 3 ) X1 ( z 3 ) + z −1H ( z 3 ) X 2 ( z 3 ) + z −2 H ( z 3 ) X 3 ( z 3 ),
1
Y1 ( z ) = V ( z1 / 3 ) + V ( z1 / 3 e − j 2 π / 3 ) + V ( z1 / 3 e − j 4π / 3 )
3
1
= H ( z ) X1 ( z ) + H ( z e − j 2 π ) X1 ( z e − j 2 π ) + H ( z e − j 4 π ) X1 ( z e − j 4 π )
3
[
]
[
1
3
1
+
3
+
]
[z −1 / 3 H (z) X 2 (z) + z −1 / 3 e − j 2π / 3 H (z e − j 2π ) X 2 (z e − j 2π ) + z −1 / 3 e − j 4π / 3 H (z e − j 4π ) X 2 (z e − j 4π )]
[z −2 / 3 H (z) X 3 (z) + z −2 / 3 e − j 4π / 3 H (z e − j 4π ) X 3 (z e − j 4π ) + z −2 / 3 e − j8π / 3 H (z e − j8π ) X 3 (z e − j8π )]
1
[H ( z) X1 ( z) + H ( z) X1 ( z) + H ( z) X1 ( z)]
3
1
+ z −1 / 3 H ( z ) X 2 ( z ) + z −1 / 3 e − j 2π / 3 H ( z ) X 2 ( z ) + z −1 / 3 e − j 4π / 3 H ( z ) X 2 ( z )
3
1 −2 / 3
+ z
H ( z ) X 3 ( z ) + z − 2 / 3 e − j 4 π / 3 H ( z ) X 3 ( z ) + z − 2 / 3 e − j 8π / 3 H ( z ) X 3 ( z )
3
= H ( z) X1 (z),
1
Y2 ( z ) = z −1 / 3V ( z1 / 3 ) + z −1 / 3 e j 2 π / 3V ( z1 / 3 e − j 2π / 3 ) + z −1 / 3 e j 4 π / 3V ( z1 / 3 e − j 4π / 3 )
3
1
−
= z H ( z) X 3 ( z),
1
Y3 ( z ) = z −1 / 3V ( z1 / 3 ) + z −1 / 3 e j 4 π / 3V ( z1 / 3 e − j 2π / 3 ) + z −1 / 3 e j8π / 3V ( z1 / 3 e − j 4 π / 3 )
3
−
2
= z H ( z ) X 2 ( z ).
Now, X 3 ( z) = Y3 ( z) and X 2 ( z) = Y1 ( z). Hence,
=
[
[
]
]
[
]
[
]
Y2 ( z ) = z −1H ( z) X 3 ( z ) = z −1H ( z)Y3 ( z ) = z −1 H ( z )[ z −1 H ( z ) X 2 ( z )] = z −2 H 2 ( z )Y1 ( z )
= z −2 H 3 ( z ) X1 ( z ). Therefore, Y ( z) = −2Y2 ( z) + 3z −(C +1)Y3 ( z)
= −2 z −2 H 3 ( z ) X1 ( z ) + 3z − (C + 1) z −1 H 2 ( z ) X1 ( z ) = z −2 [3H 2 ( z ) − 2 H 3 ( z )]X1 ( z ) for
C = 0. Thus, the transfer function of the system of Figure P13.12 is
G ( z ) = z −2 [3H 2 ( z ) − 2 H 3 ( z )].
M13.1 (a) (i)
Not for sale
527
Input Sequence
Output sequence up-sampled by5
2
2
1.5
1
Amplitude
Amplitude
1
0
0.5
0
-1
-0.5
-2
0
20
40
60
Time index n
80
-1
100
0
20
40
60
Time index n
80
100
(ii)
Input Sequence
Output sequence up-sampled by5
1
0.2
0.15
Amplitude
Amplitude
0.8
0.6
0.4
0.05
0.2
0
0.1
0
10
20
30
Time index n
40
0
50
0
10
20
30
Time index n
40
50
M13.2 (a) (i)
Output sequence down-sampled by 5
2
1
1
Amplitude
Amplitude
Input Sequence
2
0
-1
-2
0
-1
0
10
20
30
Time index n
40
50
-2
0
10
20
30
Time index n
40
50
(ii)
Not for sale
528
Output sequence down-sampled by 5
1
0.8
0.8
Amplitude
Amplitude
Input Sequence
1
0.6
0.4
0.2
0
0.6
0.4
0.2
0
10
20
30
Time index n
40
0
50
0
2
4
6
Time index n
8
10
M13.3 (a)
Output spectrum
1
0.8
0.8
Magnitude
Magnitude
Input spectrum
1
0.6
0.4
0.6
0.4
0.2
0
0.2
0
0.2
0.4
0.6
0.8
0
1
0
0.2
0.4
ω/ π
0.6
0.8
1
ω/ π
(b)
Output spectrum
1
0.8
0.8
Magnitude
Magnitude
Input spectrum
1
0.6
0.4
0.2
0
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
0
1
0
0.2
ω/ π
0.4
0.6
0.8
1
ω/ π
M13.4 (a)
Output spectrum
1
0.8
0.8
Magnitude
Magnitude
Input spectrum
1
0.6
0.4
0.2
0
0.6
0.4
0.2
0
0.2
0.4
0.6
0.8
1
ω/ π
0
0
0.2
0.4
0.6
0.8
1
ω/ π
Not for sale
529
(b)
Output spectrum
1
0.8
0.8
Magnitude
Magnitude
Input spectrum
1
0.6
0.4
0.6
0.4
0.2
0
0.2
0
0.2
0.4
0.6
0.8
0
1
0
0.2
0.4
ω/ π
0.6
0.8
1
ω/ π
M13.5 (a)
Output spectrum
0.25
0.8
0.2
Magnitude
Magnitude
Input spectrum
1
0.6
0.4
0.2
0
0.15
0.1
0.05
0
0.2
0.4
0.6
0.8
0
1
0
0.2
0.4
ω/ π
0.6
0.8
1
ω/ π
(b)
Output spectrum
0.14
0.8
0.12
Magnitude
Magnitude
Input spectrum
1
0.6
0.4
0.2
0
0.1
0.08
0.06
0
0.2
0.4
0.6
0.8
1
0.04
0
ω/ π
0.2
0.4
0.6
0.8
1
ω/ π
M13.6 (a)
Not for sale
530
Output sequence
2
1
1
Amplitude
Amplitude
Input sequence
2
0
0
-1
-2
-1
0
20
40
60
80
Time index n
100
-2
120
0
10
20
Time index n
30
40
M13.7 (a)
Output sequence
2
1
1
Amplitude
Amplitude
Input sequence
2
0
-1
-2
0
-1
0
10
20
30
Time index n
40
-2
50
0
50
100
Time index n
150
M13.8 (a)
Output sequence
2
1
1
Amplitude
Amplitude
Input sequence
2
0
-1
-2
0
-1
0
10
20
Time index n
30
40
-2
0
5
10
15
Time index n
20
25
M13.9 Using Program 13_9.m we arrive at the transfer function of the desired elliptic half1
band lowpass filter: H 0 ( z ) = A0 ( z 2 ) + z −1A1 ( z 2 ) , where
2
−
0.0192 + 0.3903z 2 + 1.2456 z −4 + z −6
A0 ( z 2 ) =
and
1 + 1.2456 z − 2 + 0.3903z − 4 + 0.0192 z − 6
0.1206 + 0.8884 z −2 + 1.7442 z −4 + z −6
A1 ( z 2 ) =
. The power-complentary half1 + 1.7442 z − 2 + 0.8884 z − 4 + 0.1206 z − 6
1
band highpass transfer function is given by H 0 ( z ) = A0 ( z 2 ) − z −1A1 ( z 2 ) . A plot
2
[
]
[
Not for sale
]
531
of the magnitude responses of the above half-band lowpass and highpass filters is
shown below:
H0(z)
Magnitude
1
H1(z)
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
M13.10 (a) A digital lowpass half-band filter can be designed by applying a bilinear
transformation to an analog lowpass Butterworth transfer function with a 3-dB cutoff
frequency at 1 rad/sec. The 3-dB cutoff frequency of the digital lowpass Butterworth
half-band filter is therefore at ωc = 2 tan −1 (1) / π = 0.5.
To design a 3rd-order digital lowpass Butterworth half-band filter we use the MATLAB
statement [num,den] = butter(3,0.5); which yields
0.1667(1 + z −1 ) 3
H ( z) =
. As can be seen from the pole-zero plot of given below all
1 + 0.3333z − 2
poles are on the imaginary axis:
Imaginary Part
1
0.5
3
0
-0.5
-1
-1.5
-1
-0.5
0
0.5
Real Part
1
1.5
Using the MATLAB statement
[d1,d2] = tf2ca([1 3 3 1]/6, [1 0 1/3 0]);
we arrive at the parallel allpass decomposition of H (z ) as
H ( z) =
1
[ A ( z 2 ) + z −1 A1 ( z 2 )],
2 0
where A0
(z 2 ) =
1
3
+ z−2
1+
1 −2
z
3
and A1 ( z 2 ) = 1. Hence,
the power-complementary highpass transfer function is given by
0.1667(1 − 3z −1 + 3z −2 − z −3 )
1
G( z) = [ A0 ( z 2 ) − z −1 A1 ( z 2 )] =
.
2
1 + 0.3333z − 2
Not for sale
532
1
Magnitude
0.8
0.6
0.4
G(z)
H(z)
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
(b) To design a 5th-order digital lowpass Butterworth half-band filter we use the
MATLAB statement [num,den] = butter(5,0.5); which yields
0.0528(1 + z −1 ) 5
H (z) =
. As can be seen from the pole-zero plot of given
1 + 0.6334 z − 2 + 0.0557z − 4
below all poles are on the imaginary axis:
Imaginary Part
1
0.5
0
-0.5
-1
-1
-0.5
0
0.5
Real Part
1
Using the MATLAB statement
[d1,d2] =
tf2ca(0.0528*[1 5 10 10 5 1], [1 0 0.6334 0 0.0557]);
we arrive at the parallel allpass decomposition of H (z ) as
H ( z) = [ A0 ( z 2 ) + z −1 A1 ( z 2 )], where A0 ( z 2 ) =
2
1
A1 ( z 2 ) =
0.5279 + z −2
1 + 0.5279z − 2
0.1056 + z −2
1 + 0.1056 z − 2
and
. Hence, the power-complementary highpass transfer function
is given by G( z) = [ A0 ( z 2 ) − z −1 A1 ( z 2 )] =
2
0.0528(1 − z −1 ) 5
1
1 + 0.6334 z − 2 + 0.0557 z − 4
Not for sale
.
533
1
Magnitude
0.8
0.6
G(z)
0.4
H(z)
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
M13.11
M13.12
L-th band Nyquist Filter, L = 5
0
Gain, dB
-20
-40
-60
-80
0
0.2
0.4
0.6
0.8
1
ω/π
Not for sale
534
Chapter 14
14.1 (a) 2-band polyphase decomposition – Using P ( z ) = 1 − c z −1 , we express
H (z) =
H ( z) =
a + bz −1
as
1 + cz −1
(a + bz −1 )(1 − cz −1 )
(1 + cz −1 )(1 − cz −1 )
=
a + (b − ac)z −1 − bcz −2
1 − c2 z−2
−2
⎛ a − bcz − 2 ⎞
⎟ + z −1 ⎛⎜ b − ac ⎞⎟. Hence, E 0 ( z 2 ) = a − bcz
and
= ⎜⎜
⎜
⎟
2 −2 ⎟
1 − c2 z−2
⎝ 1 − c2z−2 ⎠
⎝ 1− c z ⎠
b − ac
E1 ( z 2 ) =
.
1 − c2z −2
(b) 3-band polyphase decomposition – Using P ( z ) = 1 − cz −1 + c 2 z −2 , we rewrite H (z )
as
(a + bz −1 )(1 − cz −1 + c 2 z −2 ) a + (b − ac)z −1 + c(ac − b)z −2 + bc 2 z −3
H (z) =
=
(1 + cz −1 )(1 − cz −1 + c 2 z − 2 )
1 − c3z −3
2 −3
⎛ a + bc 2 z − 3 ⎞
⎟ + z −1 ⎛⎜ b − ac ⎞⎟ + z − 2 ⎛⎜ c(ac − b) ⎞⎟. Hence, E 0 ( z 3 ) = a + bc z ,
= ⎜⎜
⎜
⎟
⎜
⎟
3 −3 ⎟
1 − c3z −3
⎝ 1 − c3z −3 ⎠
⎝ 1 − c3z −3 ⎠
⎝ 1− c z
⎠
b − ac
c(ac − b)
E1 ( z 3 ) =
, E 2 (z 3 ) =
.
3
−
3
1− c z
1 − c3z −3
a − bz −1
. H a ( zW21 ) = H a (− z ) =
. Thus,
1 + cz −1
1 − cz −1
1
1 ⎛ a + bz −1 a − bz −1 ⎞⎟ a − bcz − 2
and
E 0 ( z 2 ) = [ H a ( z ) + H a (− z )] = ⎜⎜
+
=
2
2 ⎝ 1 + cz −1 1 − cz −1 ⎟⎠ 1 − c 2 z − 2
1
1 ⎛ a + bz −1 a − bz −1 ⎞⎟ (b − ac)z −1
z −1 E 1( z 2 ) = [ H a ( z ) − H a (− z )] = ⎜⎜
−
.
=
2
2 ⎝ 1 + cz −1 1 − cz −1 ⎟⎠ 1 − c 2 z − 2
Hence, a 2-band polyphase decomposition of H a (z ) is given by
14.2 (a) H a ( z ) =
a + bz −1
⎛ a − bcz − 2 ⎞
⎟ + z −1 ⎛⎜⎜ b − ac ⎞⎟⎟.
H a ( z ) = ⎜⎜
⎟
2
−
2
⎝ 1 − c2z −2 ⎠
⎝ 1− c z ⎠
3 − 4 z −1 + 2.1z −2
3 + 4 z −1 + 2.1z −2
(b) H b ( z ) =
. H b ( zW21 ) = H b (− z ) =
.
1 − 0.8 z −1 + 0.7 z − 2
1 + 0.8 z −1 + 0.7 z − 2
Thus,
1
1 ⎛ 3 − 4 z −1 + 2.1z − 2
3 + 4 z −1 + 2.1z − 2 ⎞⎟
+
E 0 ( z 2 ) = [ H b ( z ) + H b (− z )] = ⎜⎜
2
2 ⎝ 1 − 0.8 z −1 + 0.7 z − 2 1 + 0.8 z −1 + 0.7 z − 2 ⎟⎠
Not for sale
535
=
3 + z −2 + 1.47 z −4
1 + 0.76 z − 2 + 0.49 z − 4
.
1
1 ⎛ 3 − 4 z −1 + 2.1z − 2
3 + 4 z −1 + 2.1z − 2 ⎞⎟
−
[ H b ( z ) − H b (− z )] = ⎜⎜
2
2 ⎝ 1 − 0.8 z −1 + 0.7 z − 2 1 + 0.8 z −1 + 0.7 z − 2 ⎟⎠
− 1.6 z −1 − 1.12 z −3
− 1.6 − 1.12 z −2
. Hence, E1 ( z 2 ) =
.
=
1 + 0.76 z − 2 + 0.49 z − 4
1 + 0.76 z − 2 + 0.49 z − 4
z −1 E1 ( z 2 ) =
Hence, a 2-band polyphase decomposition of H b (z ) is given by
⎛ 3 + z − 2 + 1.47 z − 4 ⎞
⎛
⎞
− 1.6 − 1.12 z − 2
⎟ + z −1 ⎜
⎟
H b ( z ) = ⎜⎜
⎜ 1 + 0.76 z − 2 + 0.49 z − 4 ⎟.
−2
−4 ⎟
⎝ 1 + 0.76 z + 0.49 z ⎠
⎝
⎠
(c) H c ( z ) =
E 0 (z 2 ) =
=
=
4 + 2.5z −1 − 3.5z −2 + 2 z −3
1 − 0.4 z −1 + 0.78z − 2 + 0.18z
. H c (− z) =
−3
4 − 2.5z −1 − 3.5z −2 − 2 z −3
1 + 0.4 z −1 + 0.78z − 2 − 0.18z − 3
.
1
[ H c ( z ) + H c (− z )]
2
1 ⎛⎜ 4 + 2.5z −1 − 3.5z − 2 + 2 z − 3
4 − 2.5z −1 − 3.5z − 2 − 2 z − 3 ⎞⎟
+
2 ⎜⎝ 1 − 0.4 z −1 + 0.78 z − 2 + 0.18 z − 3 1 + 0.4 z −1 + 0.78 z − 2 − 0.18 z − 3 ⎟⎠
4 + 0.62 z −2 − 2.38 z −4 − 0.36 z −6
.
1 + 1.4 z − 2 + 0.7524 z − 4 − 0.0324 z − 6
1
z −1 E1 ( z 2 ) = [ H c ( z ) − H c (− z )] =
2
1 ⎛ 4 + 2 .5 z − 1 − 3 .5 z − 2 + 2 z − 3
4 − 2.5z −1 − 3.5z − 2 − 2 z − 3 ⎞⎟
= ⎜⎜
−
2 ⎝ 1 − 0.4 z −1 + 0.78 z − 2 + 0.18 z − 3 1 + 0.4 z −1 + 0.78 z − 2 − 0.18 z − 3 ⎟⎠
=
4.1z −1 + 1.83z −3 + 2.19z −5
. Thus,
1 + 1.4 z − 2 + 0.7524 z − 4 − 0.0324 z − 6
4.1 + 1.83z −2 + 2.19z −4
.
E1 ( z 2 ) =
1 + 1.4 z − 2 + 0.7524 z − 4 − 0.0324 z − 6
Hence, a 2-band polyphase decomposition of H c (z ) is given by
⎞
⎛
⎛ 4 + 0.62 z − 2 − 2.38 z − 4 − 0.36 z − 6 ⎞
4.1 + 1.83z − 2 + 2.19 z − 4
⎟
⎟ + z −1 ⎜
H c ( z ) = ⎜⎜
⎜ 1 + 1.4 z − 2 + 0.7524 z − 4 − 0.0324 z − 6 ⎟.
− 2 + 0.7524 z − 4 − 0.0324 z − 6 ⎟
z
1
1
.
4
+
⎠
⎝
⎠
⎝
14.3 (a) H1 ( z ) =
3 − 4 z −1
1 − 0.5z −1
=
2
∑ z − k E k (z 3 ).
We can write,
k =0
Not for sale
536
⎡ H1 ( z ) ⎤ ⎡1
1
⎢
⎥ ⎢
1
−1
⎢ H1 (W3 z ) ⎥ = ⎢1 W3
⎢ H (W 2 z )⎥ ⎢1 W − 2
3
⎣ 1 3 ⎦ ⎣
3
1 ⎤ ⎡ E 0 (z ) ⎤
⎥⎢
⎥
W3− 2 ⎥ ⎢ z −1 E1 ( z 3 ) ⎥. Thus,
W3−1 ⎥⎦ ⎢⎣ z − 2 E 2 ( z 3 )⎥⎦
⎡ E 0 ( z 3 ) ⎤ ⎡1
1
⎢ −1
⎥ ⎢
−1
3
⎢ z E1 ( z ) ⎥ = ⎢1 W3
⎢ z − 2 E 2 ( z 3 )⎥ ⎢1 W − 2
3
⎣
⎦ ⎣
Therefore,
1 ⎤
⎥
W3− 2 ⎥
W3−1 ⎥⎦
−1
⎡ H1 ( z ) ⎤
⎡1 1
⎥
⎢
1
⎢
1
1
⎢ H1 (W3 z ) ⎥ = 3 ⎢1 W3
⎢ H (W 2 z )⎥
⎢1 W 2
3
⎣ 1 3 ⎦
⎣
1 ⎤ ⎡ H1 ( z ) ⎤
⎥
⎥⎢
W32 ⎥ ⎢ H1 (W31 z ) ⎥.
W31 ⎥⎦ ⎢⎣ H1 (W32 z )⎥⎦
1
E 0 ( z 3 ) = [ H1 ( z ) + H1 ( zW31 ) + H1 ( zW32 )]
3
=
1 ⎛⎜ 3 − 4 z −1
3 − 4e j 2 π / 3 z −1
3 − 4e j 4 π / 3 z −1 ⎞⎟
3 − z −3
=
,
+
+
3 ⎜⎝ 1 − 0.5z −1 1 − 0.5e j 2 π / 3 z −1 1 − 0.5e j 4 π / 3 z −1 ⎟⎠ 1 − (0.5) 3 z − 3
z −1 E1 ( z 3 ) = [ H1 ( z ) + W31 H1 ( zW31 ) + W32 H1 ( zW32 )]
3
1
=
j 4π / 3 z −1 ⎞
j 2π / 3 z −1
1 ⎛⎜ 3 − 4 z −1
j 4 π / 3 3 − 4e
j 2 π / 3 3 − 4e
⎟
e
e
+
+
3 ⎜⎝ 1 − 0.5z −1
1 − 0.5e j 2π / 3 z −1
1 − 0.5e j 4 π / 3 z −1 ⎟⎠
⎞
⎛
− 2.5
⎟,
= z −1⎜⎜
⎟
3
−
3
⎝ 1 − (0.5) z ⎠
z − 2 E 2 ( z 3 ) = [ H1 ( z ) + W32 H1 ( zW31 ) + W31 H1 ( zW32 )]
3
1
=
j 4π / 3 z −1 ⎞
j 2 π / 3 z −1
1 ⎛⎜ 3 − 4 z −1
j 2 π / 3 3 − 4e
j 4 π / 3 3 − 4e
⎟
e
e
+
+
3 ⎜⎝ 1 − 0.5z −1
1 − 0.5e j 2π / 3 z −1
1 − 0.5e j 4 π / 3 z −1 ⎟⎠
⎛
⎞
− 1.25
⎟.
= z − 2 ⎜⎜
3 z −3 ⎟
−
1
(
0
.
5
)
⎝
⎠
Hence, E 0 ( z ) =
(b) H 2 ( z ) =
3 − z −1
1 − 0.125z −1
, E1 ( z ) =
4 + 2.1z −1 − 3.4 z − 2
1 − 0.8z −1
+ 0.6 z − 2
⎡ H 2 ( z ) ⎤ ⎡1
1
⎢
1 z ) ⎥ = ⎢1 W −1
H
W
(
⎢ 2 3 ⎥ ⎢
3
⎢ H (W 2 z )⎥ ⎢1 W − 2
3
⎣ 2 3 ⎦ ⎣
⎡ E 0 ( z 3 ) ⎤ ⎡1
1
⎢ −1
3 ) ⎥ = ⎢1 W −1
(
z
E
z
1
⎢
⎥ ⎢
3
⎢ z − 2 E 2 ( z 3 )⎥ ⎢1 W − 2
3
⎣
⎦ ⎣
=
− 2.5
1 − 0.125z
, E 2 ( z) =
−1
− 1.25
1 − 0.125z −1
.
2
∑ z − k E k (z 3 ).
We can write,
k =0
3
1 ⎤ ⎡ E0 (z ) ⎤
⎥
⎢
⎥
W3− 2 ⎥ ⎢ z −1 E1 ( z 3 ) ⎥. Thus,
W3−1 ⎥⎦ ⎢⎣ z − 2 E 2 ( z 3 )⎥⎦
1 ⎤
⎥
W3− 2 ⎥
W3−1 ⎥⎦
−1
⎡ H 2 ( z) ⎤
⎡1 1
⎥
⎢
1
⎢
1
1
⎢ H 2 (W3 z ) ⎥ = 3 ⎢1 W3
⎢ H (W 2 z )⎥
⎢1 W 2
3
⎣ 2 3 ⎦
⎣
1 ⎤ ⎡ H 2 (z) ⎤
⎥
⎥⎢
W32 ⎥ ⎢ H 2 (W31 z ) ⎥.
W31 ⎥⎦ ⎢⎣ H 2 (W32 z )⎥⎦
1
Therefore, E 0 ( z 3 ) = [ H1 ( z ) + H1 ( zW31 ) + H1 ( zW32 )]
3
Not for sale
537
=
=
1 ⎛⎜ 4 + 2.1z −1 − 3.4 z − 2 4 + 2.1e j 2 π / 3 z −1 − 3.4e j 4π / 3 z − 2 4 + 2.1e j 4 π / 3 z −1 − 3.4e j 2 π / 3 z − 2
+
+
3 ⎜⎝ 1 − 0.8 z −1 + 0.6 z − 2 1 − 0.8e j 2π / 3 z −1 + 0.6e j 4 π / 3 z − 2 1 − 0.8e j 4 π / 3 z −1 + 0.6e j 2π / 3 z − 2
4 − 0.716 z −3 − 1.224 z −6
1 + 0.928z − 3 + 0.216 z − 6
,
1
1 4 + 2.1z −1 − 3.4 z −2
z −1 E1 ( z 3 ) = [ H 2 ( z ) + W31 H 2 ( zW31 ) + W32 H 2 ( zW32 )] = (
3
3 1 − 0.8 z −1 + 0.6 z − 2
4 + 2.1e j 2π / 3 z −1 − 3.4e j 4π / 3 z −2
4 + 2.1e j 4π / 3 z −1 − 3.4e j 2π / 3 z −2
+ e j 2π / 3
+ e j 4π / 3
)
1 − 0.8e j 2π / 3 z −1 + 0.6e j 4π / 3 z − 2
1 − 0.8e j 4π / 3 z −1 + 0.6e j 2π / 3 z − 2
− 1.56 z −3 − 0.876 z −6
=
,
1 + 0.928z − 3 + 0.216 z − 6
1
1 4 + 2.1z −1 − 3.4 z −2
z −1 E 2 ( z 3 ) = [ H 2 ( z ) + W32 H 2 ( zW31 ) + W31 H 2 ( zW32 )] = (
3
3 1 − 0.8 z −1 + 0.6 z − 2
4 + 2.1e j 2π / 3 z −1 − 3.4e j 4π / 3 z −2
4 + 2.1e j 4π / 3 z −1 − 3.4e j 2π / 3 z −2
+ e j 4π / 3
+ e j 2π / 3
)
1 − 0.8e j 2π / 3 z −1 + 0.6e j 4π / 3 z − 2
1 − 0.8e j 4π / 3 z −1 + 0.6e j 2π / 3 z − 2
5.3z −3 + 2.312 z −6
=
.
1 + 0.928z − 3 + 0.216 z − 6
4 − 0.716 z −1 − 1.224 z −2
− 1.56 z −1 − 0.876 z −2
Hence, E 0 ( z ) =
, E1 ( z ) =
,
1 + 0.928 z −1 + 0.216 z − 2
1 + 0.928 z −1 + 0.216 z − 2
5.3z −1 + 2.312 z −2
E 2 (z) =
.
1 + 0.928z −1 + 0.216 z − 2
14.4 H 0 ( z) = h[0] + h[1]z −1 + h[2]z −2 + h[3]z −3 + h[ 4]z −4 + h[5]z −5 , and
H 1( z ) = H 0 (− z ) = h[0] − h[1]z −1 + h[2]z −2 − h[3]z −3 + h[ 4]z −4 − h[5]z −5 . A
realization of H 0 ( z ) and H1 ( z) in the form of Figure P14.1 using 5 delays and 6
multipliers is shown below:
z–1
h[5]
h[4]
z–1
h[3]
z–1
h[2]
z–1
h[1]
z
–1
y[n]
h[0]
x 0[n]
_1
_1
_1
x 1[n]
14.5 H 0 ( z) = h[0] + h[1]z −1 + h[2]z −2 + h[3]z −3 + h[ 4]z −4 + h[5]z −5 , and
H 1( z) = z −5 H 0 ( z −1 ) = h[5] + h[ 4]z −1 + h[3]z −2 + h[2]z −3 + h[1]z −4 + h[0]z −5 .
Not for sale
538
⎞
⎟
⎟
⎠
H 1( z ) = H 0 (− z ) = h[0] − h[1]z −1 + h[2]z −2 − h[3]z −3 + h[ 4]z −4 − h[5]z −5 . A
realization of H 0 ( z ) and H1 ( z) in the form of Figure P14.1 using 6 multipliers is
shown below:
y[n]
h[0]
x 0[n]
h[1]
h[2]
z–1
z
–1
z–1
z
–1
h[3]
h[5]
–1
z
–1
z–1
–1
z–1
z–1
z
z
h[4]
x 1[n]
14.6 (a) The structure of Figure P14.2(a) with internal variables labeled is shown below:
V0 (z)
X 0(z)
V 1(z)
X 1(z)
D
X2 (z)
X 3(z)
V 2(z)
V3 (z)
R 0(z 4 )
R 1(z 4 )
R 2(z 4 )
R3 (z 4 )
_
z1
_
z1
_
z1
Y(z)
⎡V0 ( z )⎤ ⎡1 1
1
1 ⎤ ⎡ X 0 ( z )⎤
⎢ V1 ( z ) ⎥ ⎢1 − j − 1 j ⎥ ⎢ X1 ( z ) ⎥
=
,
Analyzing the above structure we arrive at ⎢
V ( z )⎥ ⎢1 − 1 1 − 1⎥ ⎢ X ( z )⎥
⎢ 2 ⎥ ⎢1 j − 1 − j ⎥ ⎢ 2 ⎥
⎦ ⎣ X 3 (z)⎦
⎣V3 ( z ) ⎦ ⎣
and Y ( z ) = R3 ( z 4 )V3 ( z) + z −1 R2 ( z 4 )V2 ( z) + z −2 R1 ( z 4 )V1 ( z ) + z −3 R0 ( z 4 )V0 ( z).
The first equation leads to
V0 ( z) = X 0 ( z) + X1 ( z) + X 2 ( z) + X 3 ( z), V1 ( z) = X 0 ( z ) − jX1 ( z ) − X 2 ( z) + jX 3 ( z),
V2 ( z) = X 0 ( z) − X1 ( z) + X 2 ( z) − X 3 ( z), V4 ( z) = X 0 ( z) + jX1 ( z ) − X 2 ( z) − jX 3 ( z).
Substituting these 4 equations in the equation for Y (z ) and solving for the transfer
functions Gi ( z ) = Y ( z) / X i ( z ), 0 ≤ i ≤ 3, we arrive at
G0 ( z) = R3 ( z 4 ) + z −1 R2 ( z 4 ) + z −2 R1 ( z 4 ) + z −3 R0 ( z 4 ),
G1 ( z ) = jR3 ( z 4 ) − z −1 R2 ( z 4 ) − jz −2 R1 ( z 4 ) + z −3 R0 ( z 4 ),
G2 ( z) = − R3 ( z 4 ) + z −1 R2 ( z 4 ) − z −2 R1 ( z 4 ) + z −3 R0 ( z 4 ),
G3 ( z) = − jR3 ( z 4 ) − z −1 R2 ( z 4 ) + jz −2 R1 ( z 4 ) + z −3 R0 ( z 4 ).
Not for sale
539
Substituting the expressions for Ri ( z), 0 ≤ i ≤ 3, we finally arrive at
G0 ( z) = 2 + z −1 + 4 z −2 + z −3 − 1.5z −4 + 0.3z −5 − 0.9z −6 + 3.7z −7 + 3.1z −8 − 0.8z −9
+ 2.3z −10 + 1.7 z −11 ,
G1 ( z ) = j 2 − z −1 − j 4 z −2 + z −3 − j1.5z −4 − 0.3z −5 + j 0.9 z −6 + 3.7 z −7 + j 3.1z −8
+ 0.8 z −9 − j 2.3z −10 + 1.7 z −11 ,
G 2 ( z ) = −2 + z −1 − 4 z −2 + z −3 + 1.5z −4 + 0.3z −5 + 0.9 z −6 + 3.7 z −7 − 3.1z −8
− 0.8 z −9 − 2.3z −10 + 1.7 z −11 ,
G3 ( z ) = − j 2 − z −1 + j 4 z −2 + z −3 + j1.5z −4 − 0.3z −5 − j 0.9 z −6 + 3.7 z −7 − j 3.1z −8
+ 0.8 z −9 + j 2.3z −10 + 1.7 z −11 .
(b) The magnitude responses of all 4 analysis filters are shown below:
G1(e jω )
G0(e jω )
1
1
0
π_
4
3π
__
4
π
7π
_
4
2π
ω
0
π_
4
3π
__
4
π
π_
4
3π
__
4
π
2π
ω
G3(e jω )
G2(e jω )
1
1
0
π_
4
3π
__
4
π
7π
_
4
2π
ω
0
14.7 Y ( z ) = [H 0 ( z )G0 ( z) + H1 ( z )G1 ( z)]X ( z). Now, H 0 ( z ) =
5π
_
4
7π
_
4
2π
1 + z −1
1 − z −1
and H1 ( z ) =
.
2
2
1 − z −1
1 + z −1
and G1 ( z ) = −
. Then,
2
2
1
1
1
Y ( z) = ⎛⎜ (1 + z −1 ) 2 − (1 − z −1 ) 2 ⎞⎟ X ( z) = (1 + 2 z −1 + z − 2 − 1 + 2 z −1 − z − 2 ) X ( z )
4
4
4
⎝
⎠
= z −1 X ( z ). Or in other words, y[ n] = x[ n − 1] indicating that the structure of Figure
P14.3 is a perfect reconstruction system with the above choices of filters.
Choose G0 ( z ) =
14.8 (a) Since H 0 ( z) and H1 ( z) are power-complementary,
H 0 ( z)H 0 ( z −1 ) + H1 ( z )H1 ( z −1 ) = 1. Now,
Y ( z) = (H 0 ( z)G0 ( z) + H1 ( z )G1 ( z))X ( z)
(
)
= z − N H 0 ( z )H 0 ( z −1 ) + H1 ( z)H1 ( z −1 ) X ( z) = z − N X ( z). Or in other words,
y[ n] = x[ n − N ] indicating that the structure of Figure P14.3 is a perfect reconstruction
system with the above choices of filters.
Not for sale
540
ω
(b) If H 0 ( z) and H1 ( z) are causal FIR transfer functions of order N each, H 0 ( z)
and H1 ( z) are polynomials in z −1. As a result, H 0 ( z −1 ) and H1 ( z −1 ) are
polynomials in z with the highest power being z N . Hence, z − N H 0 ( z −1 ) and
z − N H1 ( z −1 ) are polynomials in z −1 , making the synthesis filters G 0 ( z ) and G1 ( z)
causal FIR transfer functions of order N each.
(c) From Figure P14.3, for perfect reconstruction we require
H 0 ( z)G 0 ( z) + H 1( z)G1( z ) = z − N . From Part (a) we note that the perfect
reconstruction condition is satisfied with G0 ( z) = z − N H 0 ( z −1 ) and
G1 ( z ) = z − N H1 ( z −1 ), if H 0 ( z )H 0 ( z −1 ) + H1 ( z )H1 ( z −1 ) = 1, i.e., if H 0 ( z ) and
H1 ( z) are power-complementary. The last condition is satisfied if and only
z − N / 2 − no
z − N / 2 − no
(z
+ z n o ) and H1 ( z ) =
(z
− z n o ). As a result,
2
2
z − N / 2 − no
G 0 ( z ) and G1 ( z) are also of the form G0 ( z ) =
(z
+ z n o ) and
2
z − N / 2 − no
G1 ( z ) =
(z
− z n o ).
2
if H 0 ( z ) =
14.9 (a) G ( z ) =
=
0.0985(1 + z −1 ) 3
(1 − 0.1584 z −1 )(1 − 0.4189 z −1 + 0.3554 z − 2 )
1 0.3554 − 0.4189 z −1 + z −2 − 0.1584 + z −1
[
]. Hence,
+
2 1 − 0.4189 z −1 + 0.3554 z − 2 1 − 0.1584 z −1
A0 ( z ) =
0.3554 − 0.4189 z −1 + z −2
1 − 0.4189 z −1 + 0.3554 z − 2
and A1 ( z ) =
− 0.1584 + z −1
1 − 0.1584 z −1
.
(b) G (z ) can be realized with only 3 multipliers as a parallel connection of two
allpass filters in the form of Figure 8.43, where the allpass filter A0 ( z ) is realized
using any one of the Type 2 or Type 3 second-order allpass structures requiring 2
multipliers and the allpass filter A1 (z ) is realized using any one of the Type 1
first-order allpass structures requiring 1 multiplier.
(c) H ( z ) =
1
2
[A0 ( z ) − A1 ( z )] =
0.2564 (1 − z −1 ) 3
(1 − 0.1584 z −1 )(1 − 0.4189 z −1 + 0.3554 z − 2 )
.
(d) A plot of the magnitude responses of G (z ) and H (z ) is shown on top of the
next page:
Not for sale
541
jω
Magnitude
jω
|G(e )|
1
|H(e )|
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
14.10 (a) G ( z ) =
=
0.1868(1 + 1.0902 z −1 + 1.0902 z −2 + z −3 )
(1 − 0.3628 z −1 )(1 − 0.5111z −1 + 0.7363 z − 2 )
1 0.7363 − 0.5111z −1 + z −2 − 0.3628 + z −1
+
[
]. Hence,
2 1 − 0.5111z −1 + 0.7363 z − 2 1 − 0.3628 z −1
A0 ( z ) =
0.7363 − 0.5111z −1 + z −2
1 − 0.5111z −1 + 0.7363 z − 2
and A1 ( z ) =
− 0.3628 + z −1
1 − 0.3628 z −1
.
(b) G (z ) can be realized with only 3 multipliers as a parallel connection of two
allpass filters in the form of Figure 8.43, where the allpass filter A0 ( z ) is realized
using any one of the Type 2 or Type 3 second-order allpass structures requiring 2
multipliers and the allpass filter A1 (z ) is realized using any one of the Type 1
first-order allpass structures requiring 1 multiplier.
(c) H ( z ) =
1
2
[A0 ( z ) − A1 ( z )] =
0.5495(1 − 1.7866 z −1 − 1.7866 z −2 + z −3 )
(1 − 0.3628 z −1 )(1 − 0.5111z −1 + 0.7363 z − 2 )
.
(d) A plot of the magnitude responses of G (z ) and H (z ) is shown below:
|G(e ω )|
|H(e ω )|
j
Magnitude
1
j
0.8
0.6
0.4
0.2
0
0
0.2
0.4
0.6
0.8
1
ω/π
14.11 An N-th order, with N odd, elliptic lowpass transfer function H (z ) satisfies the
condition
Not for sale
542
H ( z ) H ( z −1 ) =
1
1 + ε 2 R N ( z ) R N ( z −1 )
,
(A)
where R N ( z ) is a rational function of the form
N −1
−1 ⎞ 2
⎛1− z
(1 − z −1e jφ l )(1 − z −1e − jφ l )
⎟
.
RN ( z) = ⎜
− 1 jξ l
−1 − jξ l
⎜ 1 − z −1 ⎟
(
)(
)
1
−
z
e
1
−
z
e
⎝
⎠ l =0
In the above equation, the frequencies ξ l are the transmission zeros at which
∏
(B)
H (e jω ) is equal to 0, i.e., H (e jξ l ) = 0, and the frequencies φ l are the reflection
zeros at which H (e jω ) is equal to the maximum value of 1, i.e., H (e jφ l ) = 1.
From Eq. (B) it follows that
R N ( z ) = − R N ( z −1 ).
Now, as H (z ) satisfies the power-symmetric condition, we have
(C)
H ( z ) H ( z −1 ) + H (− z ) H (− z −1 ) = 1, i.e.,
H ( z ) H ( z −1 ) = 1 − H (− z ) H (− z −1 ).
(D)
From the above equation it follows that the transmission zeros of H ( − z ) are at
frequencies π − φ l and its reflection zeros are at π − ξ l . As a result, φ l + ξ l = π.
Hence, it follows that R N (− z ) = 1 / R N ( z ), or equivalently,
R N ( z ) R N (−z ) = 1.
(E)
1
From Eq. (A) we have H ( − z ) H ( − z −1 ) =
, which when
2
1 + ε R N ( − z ) R N ( − z −1 )
substituted in Eq. (D) yields
1
1
. In view of
=
H ( z ) H ( z −1 ) = 1 −
1
1 + ε 2 R N ( − z ) R N ( − z −1 ) 1 +
ε 2 R N ( − z ) R N ( − z −1 )
Eq. (E), the above equation reduces to
1
(F)
H ( z ) H ( z −1 ) =
.
1
−1
1+
RN ( z)RN ( z )
ε2
Comparing Eqs. (A) and (F) we thus conclude that ε 2 = 1, and hence,
1
. Now at a pole z = λ of H (z ),
H ( z ) H ( z −1 ) =
1 + R N ( z ) R N ( z −1 )
R N (λ ) R N (λ−1 ) = −1. From this relation, and Eqs. (C) and (E), it follows then that
R N (λ )
= 1. Also, for a lowpass power-symmetric transfer function, ξ l > π / 2
R N ( −λ )
Not for sale
543
and φ l < π / 2. Consequently, the poles of the rational function R N ( z ) / R N (− z )
must lie on the left half of the z-plane.
Since, the magnitude of the rational function R N ( z ) / R N (− z ) on the imaginary
axis is 1, using maximum-modulus theorem it can be shown that
R N ( z ) / R N (− z ) < 1 for Re z > 0. In a similar manner by replacing z with − z , it
can be shown that R N (− z ) / R N ( z ) < 1 for Re z > 0, or, equivalently,
R N ( z ) / R N (− z ) > 1 for Re z < 0. Thus,
⎧< 1, Re z > 0,
⎪
⎨= 1, Re z = 0,
⎪⎩> 1, Re z < 0,
or, in other words, all poles of H (z ) lie on the imaginary axis of the z-plane.
RN ( z)
R N (− z )
14.12 Now the magnitude-square function of an N-th order analog lowpass Butterworth
1
2
, where Ω c is the 3-dB
function G a (s) is given by G a ( jΩ) =
1 + (Ω / Ω c ) 2 N
1
2
. The
cutoff angular frequency. For Ω c = 1, then G a ( jΩ) =
1 + Ω2N
corresponding transfer function of of an N-th order analog highpass Butterworth
function is simply G a (1 / s ), whose the magnitude-square function is given by
⎛ 1 ⎞
⎟⎟
G a ⎜⎜
⎝ jΩ ⎠
2
=
Ω2N
1 + Ω2N
. As a result,
2
1
Ω2N
1
G a ( jΩ) + G a ⎛⎜ ⎞⎟ =
+
= 1. Now the bilinear transformation
⎝ jΩ ⎠
1 + Ω2N 1 + Ω2N
maps the analog angular frequency Ω to the digital angular frequency ω through the
1 − jΩ
1 − (1 / jΩ)
relation e jω =
. As − e jω =
, the analog angular frequency 1/Ω is
1 + jΩ
1 + (1 / jΩ)
mapped to the digital angular frequency π + ω. Hence, the relation
2
2
1
G a ( jΩ) + G a ⎛⎜ ⎞⎟
j
⎝ Ω⎠
2
2
2
2
= 1, becomes H 0 (e jω ) + H 0 (e j (π + ω) ) =
2
2
2
H 0 (e jω ) + H 0 (−e jω ) = H 0 (e jω ) + H1 (e jω ) = 1, where H0 (e jω ) is the
frequency response of the digital lowpass filter H 0 ( z) obtained by applying the bilinear
transformation to G a (s) and H1 (e jω ) is the frequency response of the digital highpass
filter H 0 ( z) obtained by applying the bilinear transformation to Ga (1 / s ). Note that a
2
2
digital transfer function satisfying the condition H 0 (e jω ) + H1(e jω ) = 1, is called
power-symmetric.
Not for sale
544
Moreover, from the relation it follows that the analog 3-dB cutoff angular frequency
Ω c = 1 is mapped into the digital 3-dB cutoff angular frequency ωc = π / 2. Hence,
H 0 ( z) is a digital half-band lowpass filter.
P (z)
, where P0 ( z ) and D0 ( z ) are polynomials in z −1. Hence,
Let H 0 ( z) = 0
D0 ( z )
H 0 ( e jω ) =
H 0 ( − e jω )
=
P0 (e jω )
P ( − e jω )
and H 0 (− e jω ) = 0
. Now,
D 0 ( e jω )
D 0 ( − e jω )
2
=
P0 (− e jω )P0* (− e jω )
= 1 − H 0 ( e jω )
j
ω
j
ω
*
D0 ( − e ) D0 ( − e )
D0 (e jω ) D0* (e jω ) − P0 (e jω )P0* (e jω )
D0 (e jω ) D0* (e jω )
2
= 1−
P0 (e jω )P0* (e jω )
D0 (e jω ) D0* (e jω )
. Note that there are no common factors between
P0 (e jω ) and D0 (e jω ) , and between P0* (e jω ) and D0* (e jω ). As a result, there are no
common factors between P0 (−e jω )P0* (−e jω ) and D0 (−e jω ) D0* (−e jω ). This implies
then D0 (e jω ) D0* (e jω ) = D0 (−e jω ) D0* (−e jω ). Consequently, D0 (e jω ) = D0 (−e jω ), or
P (z)
P (z)
D0 (e jω ) = d 0 (e j 2ω ). Hence, D0 ( z ) = d 0 ( z 2 ). Since H 0 ( z ) = 0
= 0
, it
D0 ( z ) d 0 ( z 2 )
P (− z )
follows then H1 ( z ) = 0
. We have shown earlier that H 0 ( z) and H1( z) are powerd0 (z 2 )
complementary. Also, P0 ( z ) is a symmetric polynomial of odd order and P1 ( z) is an
anti-symmetric polynomial of odd order. As a result, we can express
H 0 (z) =
1
2
[ A0 (z) + A1 (z)] and H1 (z) = 12 [ A0 (z) − A1 (z)], where
A0 ( z) and A1 ( z) are
stable allpass functions for stable H 0 ( z) and H1 ( z). But, H1 ( z) = H 0 (− z). Hence,
H 0 (z) =
1
2
[ A0 (− z) − A1 (− z)]. It therefore follows that
A0 ( z ) = A0 (− z ) = A0 ( z 2 ), and
1
A1 ( z ) = − A1 ( − z ) = z −1A1 ( z 2 ). Thus, H 0 ( z ) = [A0 ( z 2 ) + z −1A1 ( z 2 )].
2
14.13 From Eq. (14.18), Y ( z ) = T ( z ) X ( z ) + A( z ) X ( − z ). Let Z −1{T ( z )} = t[ n], and
Z −1{A( z )} = a[ n]. Then, an inverse z-transform of Eq. (14.18) yields
y[ n] =
∞
∑
t[l]x[ n − l] +
l = −∞
Define f 0 [ n] =
∞
∑
a[l](−1) n − l x[ n − l] =
l = −∞
t[ n] + (−1) − n a[ n]
and
∞
∑ (t[l] + (−1) n − l a[l])x[n − l].
l = −∞
f1[ n] = t[ n] − (−1) − n a[ n].
Not for sale
Then we can write
545
⎧ ∞
f 0 [l]x[n − l], for n even,
⎪
The corresponding equivalent
y[n] = ⎨ l∞= −∞
f1[l]x[n − l], for n odd.
⎪
⎩ l = −∞
realization of the 2-channel QMF bank is therefore as indicated below:
∑
∑
n even
f 0[n]
y[n]
x[n]
f 1[n]
n odd
As can be seen from the above representation, the QMF bank is, in general, a timevarying system with a period 2. Note that A( z ) = 0, if then it becomes a linear,
time-invariant system.
1
14.14 G a (s) =
. The digital transfer function H 0 ( z ) obtained by a
(s + 1)(s 2 + s + 1)
bilinear transformation is given by
( z + 1) 3
( z + 1) 3
=
H 0 ( z ) = G a ( s ) s = z −1 =
( z − 1 + z + 1)[( z − 1) 2 + ( z 2 − 1) + ( z + 1) 2 ]
2 z(3z 2 + 1)
z +1
=
(1 + z −1 ) 3
6 + 2z − 2
=
1 + 3z −1 + 3z − 2 + z − 3
6 + 2z − 2
=
⎞ 1
1 ⎛⎜ 1 + 3z − 2
+ z −1 ⎟⎟ = [A0 ( z 2 ) + z −1A1 ( z 2 )],
⎜
2 ⎝ 3 + z−2
⎠ 2
1 + 3 z −1
and A1 ( z) = 1.
3 + z −1
The corresponding power-complementary transfer function is given by
⎞ (1 − z −1 ) 3
1
1 ⎛ 1 + 3z − 2
.
H1 ( z ) = [A0 ( z 2 ) − z −1A1 ( z 2 )] = ⎜⎜
− z −1 ⎟⎟ =
−2
2
2 ⎝ 3 + z−2
6
+
2
z
⎠
A realization of the analysis part of the QMF bank is as shown in Figure 14.11
where the first-order allpass transfer function A0 (z ) is realized using any one of
the single-multiplier structure of Figure 8.24 and the zero-th order allpass transfer
function A1 (z ) is replaced with a direct connection between the input and the
output.
where A0 ( z) =
1
. The digital
14.15 G a (s) =
s 5 + 3.2361 s 4 + 5.2361 s 3 + 5.2361 s 2 + 3.2361 s + 1
transfer function H 0 ( z) obtained by a bilinear transformation is given by
H 0 (z) =
(1 + z −1 ) 5
18.9443 + 12 z − 2 + 1.0557 z − 4
=
0.0528(1 + z −1 ) 5
1 + 0.6334 z − 2 + 0.0557 z − 4
Not for sale
546
=
=
=
0.0528 + 0.5279 z −2 + 0.2639 z −4
1 + 0.6334 z − 2 + 0.0557 z − 4
0.0528(1 + 9.4704 z −2 )
1 + 0.1056 z − 2
1
2
+ z −1
+
+ 0.2639 z −1 + +0.5279 z −3 + 0.0528 z −5
1 + 0.6334 z − 2 + 0.0557 z − 4
0.2639(1 + 1.8948 z −2 )
1 + 0.5278 z − 2
[A0 (z 2 ) + z −1A1 (z 2 )], where A0 (z) =
A1 ( z ) =
0.1056 + z −1
1 + 0.1056 z −1
and
0.5278 + z −1
.
1 + 0.5278 z −1
Its power-complementary transfer function is given by
0.5278 + z −2
1 0.1056 + z −2
1
− z −1
].
H1 ( z) = [A0 ( z 2 ) − z −1A1 ( z 2 )] = [
2
2 1 + 0.1056 z − 2
1 + 0.5278 z − 2
In the realization of a magnitude-preserving QMF bank as shown in Figure 14.11,
the realization of the allpass filters A0 ( z ) and A1 (z) require 1 multiplier each,
and hence, the realization of the analysis (and the synthesis) filter bank requires a
total of 2 multipliers.
14.16 (a) Total number of multipliers required is 4(2 N − 1). Hence, the total number of
multiplications per second is equal to 4(2 N − 1) FT = 4(2 N − 1) / T , where
FT = 1 / T is the sampling frequency in Hz.
[A0 (z 2 ) + z −1A1 (z 2 )] and
1
H1 ( z) = [A0 ( z 2 ) − z −1A1 ( z 2 )]. If the order of A0 ( z ) is K and the order of
2
(b) In Figure 14.11, H 0 ( z ) =
1
2
A1 (z) is L, then the order of H 0 ( z) is 2 K + 2 L + 1 = N . Hence,
K + L = ( N − 1) / 2. The total number of multipliers needed to implement is K,
while the total number of multipliers needed to implement is L. Hence, the total
number of multipliers required to implement the QMF bank of Figure 14.11 is
2( K + L ) = N − 1. However, the multipliers here are operating t half of the
sampling rate of the input x[ n]. As a result, the total number of multiplications per
second in this case is ( N − 1) FT / 2 = ( N − 1) / 2T .
14.17 The 4 filters of the 2-channel QMF bank are: H 0 ( z) = 4 z −2 , H1 ( z ) = z −1 ,
G0 ( z) = 0.25z −1 , G1 ( z) = z −1. Substituting these transfer functions in Eq. (14.21)
we get H 0 (− z)G0 ( z) + H1 (− z)G1 ( z ) = 4 z −2 × 0.25z −1 − z −1 × z −2
= z −3 − z −3 = 0, implying aliasing cancellation condition holds. Next, substituting
the transfer functions in Eq. (14.27) we get
Not for sale
547
H 0 ( z)G0 ( z ) + H1 ( z)G1 ( z) = 4 z −2 × 0.25z −1 + z −1 × z −2 = 2 z −3 . Hence, it is a
perfect reconstruction QMF bank.
14.18 The aliasing cancellation condition is satisfied if the synthesis filters satisfy Eq.
(14.37). Hence, we choose H1 ( z) = G0 (− z ) = d − e z −1 + f z −2 − g z −3 + h z −4 ,
and G1 ( z ) = − H 0 (− z) = −(a − bz −1 + cz −2 ) = − a − bz −1 − cz −2 .
14.19 The 4 filters satisfy the aliasing cancellation condition of Eq. (14.21) and the
perfect reconstruction condition of Eq. (14.27). Interchanging H 0 ( z) and G 0 ( z ),
and interchanging H1 ( z) and G1 ( z) in Eq. (14.21) we arrive at the new aliasing
term A( z ) = G0 (− z)H 0 ( z) + G1 (− z)H1 ( z). Hence,
A(− z ) = G0 ( z )H 0 (− z) + G1 ( z)H1 (− z ) = 0, implying that the aliasing condition is
still satisfied after interchanging the analysis and synthesis filters. It also follows
from Eq. (14.27), an interchange of the analysis and synthesis filters does not
change the expression for the distortion transfer function and as a result the perfect
reconstruction condition is still satisfied.
14.20 From Eq, (14.73), it can be seen that the normalized product filter P ( z ) is of odd
length 2 L + 1. Let the degrees of H 0 ( z ) and G0 ( z) be N and K , respectively.
Hence, it follows from Eq. (14.76), N + K = 2 L. Therefore, either N and K are
both even or both odd. As a result, H 0 ( z ) and G0 ( z) cannot be of even and odd
lengths, respectively.
Moreover, P (z ) is a symmetric polynomial. If H 0 ( z ) is a symmetric polynomial
and G0 ( z) is an antisymmetric polynomial, their product cannot be a symmetric
polynomial.
14.21 P ( z ) = (1 + z −1 ) 3 (1 + z ) 3 ( az 2 + bz + c + bz −1 + az −2 ) = az 5 + (6 a + b) z 4
+ (15a + 6b + c ) z 3 + (20 a + 16b + 6c) z 2 + (16 a + 26 b + 15c) z + (12 a + 30b + 20c )
+ (16 a + 26 b + 15c ) z −1 + (20 a + 16 b + 6c ) z −2 + (15a + 6b + c ) z −3 + (6 a + b) z −4 + az −5 .
Since the even powers of P ( z ) must be zeros and the coefficient of z 0 be equal to
1, we must have 6 a + b = 0, 20 a + 16 b + 6c = 0, and 12a + 30b + 20c = 1. Solving
these 3 equations we arrive at a = 0.01171875, b = −0.0703125, c = 0.1484375 .
Hence, P ( z ) = (1 + z −1 ) 3 (1 + z ) 3 (0.1171875 z 2 − 0.0703125 z + 0.1484375
− 0.0703125 z −1 + 0.1171875 z 2 ) = 0.1171875 z 5 (1 + z −1 ) 6 (1 − 5.4255 z −1 + 9.4438 z −2 )
× (1 − 0.5745 z −1 + 0.1059 z −2 ) .
One possible factorization of P ( z ) is given by
Not for sale
548
H 0 ( z) = 0.01171875(1 + z −1 )(1 − 5.4255z −1 + 9.4438z −2 )(1 − 0.5745z −1 + 0.1059z −2 ),
and G0 ( z) = (1 + z −1 ) 5 . Thus, the highpass analysis filter is given by
H1 ( z) = G0 (− z) = (1 − z −1 ) 5 .
14.22 Without any loss of generality, let N = 4. Let
H 0( z ) = h[0] + h[1] z −1 + h[2] z −2 + h[3] z −3 + h[ 4] z −4 . Then,
H 1( z ) = z −4 H 0(− z −1 ) = z −4 (h[0] − h[1]z + h[2]z 2 − h[3]z 3 + h[4]z 4 )
= h[4] − h[3]z −1 + h[2]z −2 − h[1]z −3 + h[0]z −4 . A realization of the analysis filter
bank using N + 1 = 5 multipliers and 2 N = 8 two-input adders is shown on top of
the next page:
z–1
z–1
h[4]
h[3]
z–1
z–1
h[2]
h[1]
y 0[n]
h[0]
x[n]
_1
_1
z–1
y 1[n]
z–1
z–1
z–1
14.23 For an orthogonal filter bank, the two analysis filters H 0 ( z ) =
and H 1 ( z ) =
∑
N
n=0
∑=
N
n 0
h0 [n]z − n
h1[ n] z − n are causal FIR filters satisfy the power
complementary property, i.e., H 0 ( z ) H 0 ( z −1 ) + H 1 ( z ) H 1 ( z −1 ) = γ , where γ > 0.
We assume h0 [0] ≠ 0 and h1[0] ≠ 0. It follows from Section 7.3 that a linearphase FIR filter has either a symmetric or an anti-symmetric impulse response. As
a result, if H 0 (z ) and H 1 (z ) are linear-phase transfer functions, then they are of
the form H 0 ( z ) = e − jβ 0 z − N H 0 ( z −1 ) and H 1 ( z ) = e − jβ 0 z − N H 1 ( z −1 ).
Substituting the expressions for H 0 ( z −1 ) and H1 ( z −1 ) in the powercomplementary condition we arrive at e jβ 0 z N H 02 ( z ) + e jβ1 z N H 12 ( z ) = γ, which
can be rewritten as
[e jβ 0 / 2 H 0 ( z ) + je jβ1 / 2 H 1 ( z )][e jβ 0 / 2 H 0 ( z ) − je jβ1 / 2 H 1 ( z )] = γ z − N . Both
quantities inside the square brackets are causal FIR transfer functions. Hence, we
have
e jβ 0 / 2 H 0 ( z ) + je jβ1 / 2 H 1 ( z ) = α 0 z − N 0 ,
(G)
e jβ 0 / 2 H 0 ( z ) − je jβ1 / 2 H 1 ( z ) = α1 z − N 1 ,
(H)
and
Not for sale
549
where α 0 α1 = γ and N 0 + N1 = N . Adding Eq. (H) from Eq. (G) we get
H 0 ( z ) = e − jβ 0 / 2 (α 0 z − N 0 + α1 z − N 1 ) and
H 1 ( z ) = − je − jβ1 / 2 (α 0 z − N 0 − α1 z − N 1 ). Hence, as the analysis filters have
transfer functions that are weighted sum of two delays, they can not be used to
design filters with any practical frequency response specifications.
14.24 From Eq. (14.90) we have H 0 ( z) = − z −3 H1 (− z −1 ) = − z −3 (a − bz + cz 2 − dz 3 )
= d − cz −1 + bz −2 − az −3 . Next, from Eq. (14.92) we get
G0 ( z ) = z −3 H 0 ( z −1 ) = z −3 (d − cz + bz 2 − az 3 ) = − a + bz −1 − cz −2 + dz −3 and
G1 ( z ) = z −3 H1 ( z −1 ) = z −3 ( a + bz + cz 2 + dz 3 ) = d + cz −1 + bz −2 + az −3 .
14.25 Substituting the transfer functions in Eq. (14.21) we get
H 0 (− z )G0 ( z) + H1 (− z)G1 ( z) = (3 − 4 z −1 )(−0.5 + z −1 ) + (1 − 2 z −1 )(1.5 − 2 z −1 )
= ( −1.5 + 5z −1 − 4 z −2 ) + (1.5 − 5z −1 + 4 z −2 ) = 0 implying that the aliasing
cancellation condition is satisfied. Next, substituting the transfer functions in Eq.
(14.27) we get
H 0 ( z)G0 ( z ) + H1 ( z)G1 ( z) = (3 + 4 z −1 )(−0.5 + z −1 ) + (1 + 2 z −1 )(1.5 − 2 z −1 )
= (−1.5 + z −1 + 4 z −2 ) + (1.5 + z −1 − 4 z −2 ) = 2 z −1 implying that the perfect
reconstruction condition is satisfied.
14.26 H 0 ( z ) = a + bz −1 + cz −2 + dz −3 + ez −4 + fz −5 . From Eq. (14.90) we get
H 1 ( z ) = z −5 H 0 ( − z −1 ) = z −5 ( a − bz + cz 2 − dz 3 + ez 4 − fz 5 )
= − f + ez −1 − dz −2 + cz −3 − bz −4 + az −5 . From Eq. (14.92), we arrive at
G0 ( z ) = z −5 H 0 ( z −1 ) = f + ez −1 + dz −2 + cz −3 + bz −4 + az −5 and
G1 ( z ) = z −5 H 1 ( z −1 ) = a − bz −1 + cz −2 − dz −3 + ez −4 − fz −5 .
14.27 To develop the realization of the synthesis filter bank we redraw Figure P14.4 as
shown below:
2
_
_
z 1
k1
2
_1
_k
k1
_
z 1
k3
_
3
_
z 1
kN
kN
The i-th stage of the above analysis filter bank is of the form shown below:
Not for sale
550
(i)
V0 (z)
(i)
X 0 (z)
(i)
_
(i)
X 1 (z)
_1
z
Y0 (z)
ki
ki
(i)
Y1 (z)
(i)
V1 (z)
The input-output relation of the lattice part of the above figure is given by
(i )
⎡Y (i ) ( z )⎤ ⎡ 1
k i ⎤ ⎡V0 ( z )⎤
0
⎥ which can be solved for the input variables
⎢
⎥=
⎢
⎢⎣Y1(i ) ( z )⎥⎦ ⎢⎣− k i 1 ⎥⎦ ⎢⎣V1(i ) ( z )⎥⎦
(i )
(i )
−1
⎡U (i ) ( z )⎤ ⎡ 1
1 ⎡ 1 − k i ⎤ ⎡Y0 ( z )⎤
k i ⎤ ⎡Y0 ( z )⎤
⎥, a
⎢
⎥
⎢
leading to ⎢ 0(i ) ⎥ = ⎢
=
1 ⎥⎦ ⎢Y (i ) ( z )⎥
⎢⎣U 1 ( z )⎥⎦ ⎣− k i 1 ⎥⎦ ⎢⎣Y1(i ) ( z )⎥⎦ 1 + k i2 ⎢⎣k i
⎦
⎣ 1
realization of which is indicated below:
(i)
(i)
Y0 (z)
si
(i)
_s
i
Y1 (z)
U0 (z)
s i = k i /(1+k i2)
(i)
U1 (z)
where si = k i /(1 + k i2 ). A cascade of the above two lattice structures thus has an
input-output relation given by
(i )
(i )
⎡U (i ) ( z )⎤
1 ⎡ 1 − ki ⎤ ⎡ 1
k i ⎤ ⎡V0 ( z )⎤ ⎡1 0 ⎤ ⎡V0 ( z )⎤
0
⎥.
⎢
⎥=
⎢
⎥=
⎢
1 ⎥⎦ ⎢⎣− k i 1 ⎥⎦ ⎢V (i ) ( z )⎥ ⎢⎣0 1 ⎥⎦ ⎢V (i ) ( z )⎥
⎢⎣U 1(i ) ( z )⎥⎦ 1 + k i2 ⎢⎣k i
⎦
⎣ 1
⎦
⎣ 1
Likewise, the input-output relation of the delay part of the i-th stage of the analysis
⎡V (i ) ( z )⎤ ⎡1 0 ⎤ ⎡ X (i ) ( z )⎤
0
⎥ which can be solved for the
filter bank is given by ⎢ 0(i ) ⎥ = ⎢
−1 ⎥ ⎢ ( i )
0
z
⎣
⎦
⎢⎣ X 1 ( z )⎥⎦
⎢⎣V1 ( z )⎥⎦
⎡ (i ) ⎤
⎡W (i ) ( z )⎤ ⎡ −1
0 ⎤ ⎢V0 ( z )⎥, a realization of which is
input variables leading to ⎢ 0(i ) ⎥ = ⎢ z
⎢⎣W1 ( z )⎥⎦ ⎣ 0 1 ⎥⎦ ⎢⎣V1(i ) ( z )⎥⎦
indicated below:
(i)
V0 (z)
_
z 1
(i)
V1 (z)
(i)
W0 (z)
(i)
W1 (z)
Hence, the cascaded-lattice realization of the synthesis filter bank of the twochannel orthogonal filter bank is as shown below where si = k i /(1 + k i2 ). :
Not for sale
551
_
z 2
_
z 2
2
2
sN
s3
s1
_s
N
_s
_s
3
_
z 1
1
_1
14.28 Figure P14.4 with the down-samplers removed and internal variables labeled is
shown below:
(N _ 2)
Y0
X(z)
_
_
z 1
_k
k1
k1
(N)
Y 0 (z)
_
3
k3
_2
z
_1
(z)
(N _ 2)
Y1
(z)
kN
kN
_2
(N)
Y 1 (z)
z
(r )
(r )
(r )
(r )
Denoting the transfer functions H 0 ( z ) = Y0 ( z ) / X ( z ) and H 1 ( z ) = Y1 ( z ) / X ( z ),
we arrive at an equivalent representation of the above analysis filter bank as indicated
below:
X(z)
(N _ 2)
H0
(N)
H 0 (z)
(z)
_
(N _ 2)
H1
(z)
_
z 2
kN
kN
(N)
H 1 (z)
(N )
( N − 2)
( z ) + k N z − 2 H1( N − 2) ( z ) and
Analysis yields H 0 ( z ) = H 0
H1( N ) ( z ) = −k N H 0( N − 2) ( z ) + z − 2 H1( N − 2) ( z ). Solving these two equations, we get
2
(1 + k N
) H 0( N − 2) ( z ) = H 0( N ) ( z ) − k N H1( N ) ( z ) and
2 − 2 ( N − 2)
(1 + k N
) z H1
( z ) = k N H 0( N ) ( z ) + H 1( N ) ( z ). Choose k N such that the highest power of
z −1 in H 0( N ) ( z ) − k N H1( N ) ( z ) is eliminated. By construction, the next highest power of z −1
( N − 2)
( z ) to N − 2. Moreover, the coefficients of z 0
also is removed reducing the order of H 0
and z −1 in k N H 0( N ) ( z ) + H1( N ) ( z ) are also zero for the above choice of k N , resulting in a
( N − 2)
( z ) of order N − 2. Continuing this process, we arrive at a cascaded lattice
causal H1
realization of the analysis filter bank of an orthogonal QMF bank.
(3)
From Eq. (14.87) we have H 0 ( z ) = 0.3415 + 0.5915z −1 + 0.1585z − 2 − 0.0915z − 3 and
(3)
from Eq. (14.89a) we have H1 ( z ) = −0.0915 − 0.1585z −1 + 0.5915z − 2 − 0.3415z − 3
(1)
(3)
(3)
We now form (1 + k 32 ) H 0 ( z ) = H 0 ( z ) − k 3 H1 ( z ) = (0.3415 + 0.0915k 3 )
+ (0.5915 + 0.1585 k3 ) z −1 + (0.1585 − 0.5915 k 3 ) z −2 + ( −0.0915 + 0.3415k 3 ) z −3 .
Not for sale
552
(1)
(3)
(3)
Choose k 3 = 0.0915 / 0.3415 = 0.2679. Then 1.0718H 0 ( z ) = H 0 ( z ) − k 3 H1 ( z )
(1)
= 0.366 + 0.634 z −1 , implying, H 0 ( z ) = 0.3415 + 0.5915z −1 = 0.3415(1 + 1.7321z −1 ).
(1)
(3)
(3)
We next form (1 + k 32 ) z − 2 H1 ( z ) = [k 3 H 0 ( z ) + H1 ( z )] or,
1.0718 z − 2 H 1(1) ( z ) = [0.2679H 0(3) ( z ) + H1(3) ( z )] = 0.634 − 0.366 z −1 , implying,
H1(1) ( z ) = 0.5915 − 0.3415z −1 = 0.3415(1.7321 − z −1 ). Hence, k1 = 1.7321. A cascaded
lattice realization of the analysis filter bank is as shown below:
2
_
z 1
_1.7321
_ 0.2679
1.7321
0.2679
_
z 2
_1
2
From the solution of Problem 14.27 we arrive at the structure of the synthesis filter
bank shown on the next page to ensure the realization of the orthogonal perfect
reconstruction QMF bank.
_
z 2
2
0.25
0.433
_
_
0.25
2
_
z 1
0.433
_1
14.29 (a) H 0 ( z ) = 1 + 3 z −1 + 14 z −2 + 22 z −3 − 12 z −4 + 4 z −5 . Hence,
H 1 ( z ) = − z −5 H 0 ( − z −1 ) = 4 + 12 z −1 + 22 z −2 − 14 z −3 + 3 z −4 − z −5 .
(b) To develop the cascade lattice realization of the analysis filter bank, we rewrite
(5)
(5)
the analysis transfer functions as H 0 ( z ) = H 0 ( z ) and H1 ( z ) = H1 ( z ). Next,
(3)
(3)
(5)
(5)
we determine H 0 ( z ) using the relation (1 + k 52 ) H 0 ( z ) = H 0 ( z ) − k 5 H1 ( z )
and choose k5 so that the coefficient of z −5 is eliminated. Now,
(1 + k 52 ) H 0(3) ( z ) = (1 − 4k 5 ) + (3 − 12k 5 ) z −1 + (14 − 22k 5 ) z − 2 + (22 + 14k 5 ) z − 3
+ (−12 − 3k 5 ) z −4 + (4 + k 5 ) z −5 . We choose k 5 = −4. Then (1 + k 52 ) H 0 ( z ) =
(3)
= 17 H 0(3) ( z ) = 17 + 51z −1 + 102 z − 2 − 34 z − 3 . Note that as expected the above
choice of k 5 also cancels the coefficient of z −4 . We thus have,
H 0(3) ( z ) = 1 + 3 z −1 + 6 z − 2 − 2 z − 3 . Next we determine H1(3) ( z ) using the relation
(1 + k 52 ) z − 2 H1(3) ( z ) = k 5 H 0(5) ( z ) + H1(5) ( z ) which leads to
17 z − 2 H 1(3) ( z ) = −34 z − 2 − 102 z − 3 + 51z − 4 − 17 z − 5 . It should be noted that here,
Not for sale
553
as expected, the choice of k 5 has resulted in zero-valued coefficients of z 0 and
z −1 . Hence, H1 ( z ) = −2 − 6 z −1 + 3 z − 2 − z − 3 . It can be verified that the same
(3)
(3)
(3)
expression for H1(3) ( z ) is obtained from H 1 ( z ) = − z − 3 H 0 (− z −1 ).
(1)
Next, we determine H 0 ( z ) using the relation
(1 + k 32 ) H 0(1) ( z ) = H 0(3) ( z ) − k 3 H1(3) ( z ) and choose k 3 = 2 so that the coefficient
(1)
(1)
of z −3 is eliminated. This results in H 0 ( z ) = 1 + 3 z −1 and H1 ( z ) = 3 − z −1.
(1)
Analysis of the structure of Figure P14.4 yields H 0 ( z ) = 1 + k1 z −1 and
H1(1) ( z ) = k1 − z −1. Hence, k1 = 3. The final realization of the analysis filter bank
is shown below:
2
_2
_3
_
z 1
3
4
_
2
_
z 2
_1
_
z 2
4
2
From the solution of Problem 14.27 we arrive at the structure of the synthesis filter
bank shown below to ensure the realization of a paraunitary perfect reconstruction
QMF bank.
_
z 2
_
z 2
2
4/17
_ 2/5
_ 3/10
_ 4/17
2/5
3/10
2
_
z 1
_1
14.30 (a) H 0 ( z ) = 0.5 − z −1 + 10.5 z −2 − 13.5 z −3 − 5 z −4 − 2.5 z −5 . Hence,
H 1 ( z ) = − z −5 H 0 ( − z −1 ) = −2.5 + 5 z −1 − 13.5 z −2 − 10.5 z −3 − z −4 − 0.5 z −5 .
(b) To develop the cascade lattice realization of the analysis filter bank, we rewrite
(5)
(5)
the analysis transfer functions as H 0 ( z ) = H 0 ( z ) and H1 ( z ) = H1 ( z ). Next,
(3)
(3)
(5)
(5)
we determine H 0 ( z ) using the relation (1 + k 52 ) H 0 ( z ) = H 0 ( z ) − k 5 H1 ( z )
and choose k5 so that the coefficient of z −5 is eliminated. Now,
(1 + k 52 ) H 0(3) ( z ) = (0.5 + 2.5k 5 ) + (−1 − 5k 5 ) z −1 + (10.5 + 13.5k 5 ) z − 2 + (−13.5 + 10.5k 5 ) z − 3
+ ( −5 + k 5 ) z −4 + ( −2.5 + 0.5k 5 ) z −5 . We choose k 5 = 5. Then (1 + k 52 ) H 0 ( z ) =
(3)
= 26 H 0(3) ( z ) = 13 − 26 z −1 + 78 z − 2 + 39 z − 3 . Note that as expected the above
choice of k 5 also cancels the coefficient of z −4 . We thus have,
Not for sale
554
H 0(3) ( z ) = 0.5 − z −1 + 3 z − 2 + 1.5 z − 3 . Next we determine H1(3) ( z ) using the
(3)
(5)
(5)
relation (1 + k 52 ) z − 2 H1 ( z ) = k 5 H 0 ( z ) + H1 ( z ) which leads to
26 z − 2 H1(3) ( z ) = 39 z − 2 − 78 z − 3 − 26 z − 4 − 13 z − 5 . It should be noted that here, as
expected, the choice of k 5 has resulted in zero-valued coefficients of z 0 and z −1 .
(3)
Hence, H1 ( z ) = 1.5 − 3 z −1 − z − 2 − 0.5 z − 3 . It can be verified that the same
(3)
(3)
expression for H1(3) ( z ) is obtained from H 1 ( z ) = − z − 3 H 0 (− z −1 ). Next, we
(1)
(1)
(3)
(3)
determine H 0 ( z ) using the relation (1 + k 32 ) H 0 ( z ) = H 0 ( z ) − k 3 H1 ( z ) and
choose k 3 = −3 so that the coefficient of z −3 is eliminated. This results in
H 0(1) ( z ) = 0.5 − z −1 = 0.5(1 − 2 z −1 ) and H1(1) ( z ) = −1 − 0.5 z −1 = 0.5(−2 − z −1 ).
(1)
Analysis of the structure of Figure P14.4 yields H 0 ( z ) = 1 + k1 z −1 and
H1(1) ( z ) = k1 − z −1. Hence, k1 = −2. The final realization of the analysis filter
bank is shown on top of next page:
2
3
2
_
z 1
_5
_2
_1
_3
_
z 2
5
_
z 2
2
From the solution of Problem 14.27 we arrive at the structure of the synthesis filter
bank shown below to ensure the realization of a paraunitary perfect reconstruction
QMF bank.
_
z 2
_
z 2
2
_ 2/5
5/26
_
_ 3/10
2/5
5/26
_
z 1
3/10
2
_1
14.31 (a) The input-output relation of the l –th two-pair is given by
⎡ Rl ( z ) ⎤ ⎡ 1 k l ⎤ ⎡ Rl − 1 ( z ) ⎤
⎢⎣ S l ( z ) ⎥⎦ = ⎢⎣ kl 1 ⎥⎦ ⎢ z − 2 S ( z)⎥ , from which we obtain
l −1 ⎦
⎣
Rl ( z) = Rl −1 ( z ) + kl [ z −2 S l −1 ( z)] and S l ( z) = kl Rl −1 ( z) + [ z −2 S l −1 ( z)]. The
realization of the two-pair is thus as shown below:
Rl _ 1(z)
R l (z)
kl
_
z 2Sl _ 1(z)
kl
S l (z)
(b) The portion of Figure P14.5 upto the m-th stage is then as shown below:
Not for sale
555
Pm _ 1 (z)
Pm(z)
km
Q m _ 1(z)
km
_2
Qm(z)
z
Analysis of the above structure yields Pm ( z ) = Pm −1 ( z ) + k m z −2 Qm −1 ( z ) and
Qm ( z ) = k m Pm −1 ( z ) + z −2 Qm −1 ( z ).
(c) Analysis of the structure of Figure P14.5 yields H 0 ( z) = PM ( z ) + Q M ( z )
= PM ( z ) + z − (2 M + 1) PM ( z −1 ). Hence, H 0 ( z −1 ) = PM ( z −1 ) + z (2 M +1) PM ( z ).
Therefore, z −(2 M +1) H 0 ( z −1 ) = z − (2 M +1) PM ( z −1 ) + PM ( z) = H 0 ( z). Since the
order of H 0 ( z) is 2 M + 1, H 0 ( z) is a Type 2 linear-phase FIR transfer function.
Similarly, analysis of the structure of Figure P14.5 yields H1 ( z) = PM ( z) − Q M ( z)
= PM ( z ) − z − (2 M + 1) PM ( z −1 ). Hence, H1 ( z −1 ) = PM ( z −1 ) − z (2 M + 1) PM ( z ).
Therefore, z − (2 M + 1) H1 ( z −1 ) = z − (2 M + 1) PM ( z −1 ) − PM ( z ) = − H1 ( z ). Since the
order of H1 ( z) is 2 M + 1, H1 ( z) is a Type 4 linear-phase FIR transfer function.
It follows from Figure P14.5 that
⎡ 1 k M ⎤ ⎡1 0 ⎤ ⎡ 1 k1 ⎤ ⎡1 0 ⎤ ⎡ 1 k 0 ⎤
E( z ) = ⎡1 1 ⎤ ⎢
L
⎢⎣1 − 1⎥⎦ ⎣ k M
1 ⎥⎦ ⎢⎣0 z −1 ⎥⎦ ⎢⎣ k1 1 ⎥⎦ ⎢⎣0 z −1 ⎥⎦ ⎢⎣ k 0 1 ⎥⎦
1 0 ⎤
= D 2 Γ (z)TM KT1 Γ (z)T0 , where D 2 = ⎡1 1 ⎤ and Γ ( z) = ⎡⎢
−1 . We
⎢⎣1 − 1⎥⎦
⎣0 z ⎥⎦
determine the synthesis bank for perfect reconstruction by choosing
−1 K T −1 Γ −1 ( z )T −1 . The final
R ( z ) = αz − M E −1 ( z ) = αz − M D 2−1 Γ −1 ( z)TM
1
0
realization of the synthesis filter bank is shown below which satisfies the perfect
reconstruction condition within a scale factor.
(c)
_
z 2
_
z 2
2
_
_
2
_
kM
k1
_
kM
k1
_
k0
_
_
z 1
k0
_1
14.32 From Figure P14.5 we observe that H 0 ( z ) = PM ( z ) + QM ( z ) and
H 1 ( z ) = PM ( z ) − QM ( z ). Solving these equations we get
1
2
1
2
PM ( z ) = [ H 0 ( z ) + H 1 ( z )] and QM ( z ) = [ H 0 ( z ) − H 1 ( z )]. Next, from the
Not for sale
556
solution of Problem 14.31, Part (b), we have Pm ( z ) = Pm −1 ( z ) + k m z −2 Qm −1 ( z )
and Qm ( z ) = k m Pm −1 ( z ) + z −2 Qm −1 ( z ). Solving these two equations we get
1
1
Pm −1 ( z ) =
[ Pm ( z ) − k m Qm ( z )] and Qm −1 ( z ) =
[Qm ( z ) − k m Pm ( z )].
2
2 −2
1 − km
(1 − k m
)z
To synthesize the analysis filter bank, choose k m so that the coefficient of the highest
power of Pm −1 (z ) in z −1 is equal to 0. It can be shown that this choice of also guarantees
that the coefficient of the second highest power of is also 0. Hence, the order of Pm −1 (z ) is
2 less that of Pm (z ).
(a) Here M = 2. Hence, P2 ( z ) = [ H 0 ( z ) + H 1 ( z )] = 1 + 2 z −1 + 12 z −2 + 15 z −3
2
1
+ 4 z −4 + z −5 and Q2 ( z ) = [ H 0 ( z ) − H1 ( z )] = 2 + 4 z −1 + 15z −2 + 12z −3 + 2 z −4 + z −5 .
1
2
We form
P2 ( z ) − k 2 Q2 ( z ) = (1 − 2 k 2 ) + (2 − 4 k 2 ) z −1 + (12 − 15k 2 ) z −2 + (15 − 12 k 2 ) z −3
+ ( 4 − 2 k 2 ) z −4 + (2 − k 2 ) z −5 . Choose k2 = 2. Then
P2 ( z ) − k 2 Q2 ( z ) = −3 − 6 z −1 − 18 z −2 − 9 z −3 . Thus,
1
P1 ( z ) =
[ P2 ( z ) − k 2 Q2 ( z )] = 1 + 2 z −1 + 6 z −2 + 3z −3 . Likewise,
2
1 −k 2
Q1 ( z ) =
1
(1 − k 22 ) z − 2
[Q2 ( z ) − k 2 P2 ( z )] = 3 + 6 z −1 + 2 z − 2 + z − 3 . Next, we form
P1 ( z ) − k1Q1 ( z ) = (1 − 3k1 ) + (2 − 6 k1 ) z −1 + (6 − 2 k1 ) z −2 + (3 − k1 ) z −3 . Choose k1 = 3.
1
Then, P0 ( z ) =
[ P1 ( z ) − k1Q1 ( z )] = 1 + 2 z −1 . Likewise,
2
1 −k 1
Q0 ( z ) =
1
(1 − k 21) z − 2
[Q1 ( z ) − k1 P1 ( z )] = 2 + z −1 . From Figure P14.5 we have
P0 ( z ) = 1 + k0 z −1 and Q0 ( z) = k0 + z −1 . Hence, it follows that k0 = 2. As a result, the
analysis filter bank is as shown below:
P 0(z)
X(z)
_
z 1
3
2
_
z 2
Q 0 (z)
H0 (z)
2
2
3
2
P 2(z)
P 1(z)
2
_
z 2
Q 1 (z)
Q 2 (z)
_1
H1 (z)
2
The corresponding synthesis filter bank for a perfect reconstruction filter bank is as shown
below:
Not for sale
557
_
_
2
_
z 2
_
z 2
2
2
_3
_
2
2
_3
_
2
_
z 1
_1
(b) Here M = 2. Hence, P2 ( z ) = [ H 0 ( z ) + H 1 ( z )] = 1 − 2.5z −1 − 13.5z −2 + 18z −3
2
1
+ 5z −4 − 2 z −5 and
Q2 ( z ) = [ H 0 ( z ) − H1 ( z )] = −2 + 5z −1 + 18z −2 − 13.5z −3 − 2.5z −4 + z −5 . We form
2
1
P2 ( z ) − k 2 Q2 ( z ) = (1 + 2 k 2 ) − (2.5 + 5k 2 ) z −1 − (13.5 + 18k 2 ) z −2 + (18 + 13.5k 2 ) z −3
1
+ (5 + 2.5k 2 ) z −4 − (2 + k 2 ) z −5 . Choose k 2 = −2. Then P1 ( z ) =
[ P2 ( z ) − k 2 Q2 ( z )]
1 − k 22
= 1 − 2.5z −1 − 7.5z −2 + 3z −3 . Likewise,
1
Q1 ( z ) =
[Q2 ( z ) − k 2 P2 ( z )] = 3 − 7.5z −1 − 2.5z − 2 + z − 3 . Next, we form
(1 − k 22 ) z − 2
P1 ( z ) − k1Q1 ( z ) = (1 − 3k1 ) − (2.5 − 7.5k1 ) z −1 − (7.5 − 2.5k1 ) z −2 + (3 − k1 ) z −3 . Choose
1
k1 = 3. Then, P0 ( z ) =
[ P1 ( z ) − k1Q1 ( z )] = 1 − 2.5z −1 . Likewise,
1 − k 21
Q0 ( z ) =
1
(1 − k 21) z − 2
[Q1 ( z ) − k1 P1 ( z )] = −2.5 + z −1 . Hence, k 0 = −2.5. As a result, the
analysis filter bank is as shown below:
P 0(z)
X(z)
P 1(z)
_ 2.5
_
z 1
P 2(z)
_2
3
_
z 2
_
z 2
Q 0 (z)
2
_2
3
_ 2.5
H0 (z)
Q 2 (z)
Q 1 (z)
_1
H1 (z)
2
The corresponding synthesis filter bank for a perfect reconstruction filter bank is as shown
below:
2
_
z 2
_
z 2
2
2
_3
2.5
2
_3
2.5
_
z 1
_1
(c) Here M = 2. Hence, P2 ( z ) = [ H 0 ( z ) + H 1 ( z )] = 1 − 2.5z −1 + 0.75z −2 + 6 z −3
2
1
Not for sale
558
− 5z −4 + 2 z −5 and Q2 ( z ) = [ H 0 ( z ) − H1 ( z )]
1
2
= 2 − 5z −1 + 6 z −2 + 0.75z −3 − 2.5z −4 + z −5 . We form
P2 ( z ) − k 2 Q2 ( z ) = (1 − 2 k 2 ) − (2.5 − 5k 2 ) z −1 − (0.75 − 6 k 2 ) z −2 + (6 − 0.75k 2 ) z −3
1
− (5 − 2.5k 2 ) z −4 + (2 − k 2 ) z −5 . Choose k2 = 2. Then P1 ( z ) =
[ P2 ( z ) − k 2 Q2 ( z )]
1 − k 22
= 1 − 2.5z −1 + 3.75z −2 − 1.5z −3 . Likewise,
1
Q1 ( z ) =
[Q2 ( z ) − k 2 P2 ( z )] = −1.5 + 3.75z −1 − 2.5z − 2 + z − 3 . Next, we form
2
2
−
(1 − k 2 ) z
P1 ( z ) − k1Q1 ( z ) = (1 + 1.5k1 ) − (2.5 − 3.75k1 ) z −1 + (3.75 + 2.5k1 ) z −2 − (1.5 + k1 ) z −3 .
1
Choose k1 = −1.5. Then, P0 ( z ) =
[ P1 ( z ) − k1Q1 ( z )] = 1 − 2.5z −1 . Likewise,
2
1 −k 1
Q0 ( z ) =
1
(1 − k 21) z − 2
[Q1 ( z ) − k1 P1 ( z )] = −2.5 + z −1 . Hence, k 0 = −2.5. As a result, the
analysis filter bank is as shown below:
P 0(z)
X(z)
_
z 1
P 2(z)
P 1(z)
_ 2.5
_ 1.5
_ 2.5
_ 1.5
_
z 2
2
2
2
_
z 2
Q 0 (z)
H0 (z)
Q 2 (z)
Q 1 (z)
_1
H1 (z)
2
The corresponding synthesis filter bank for a perfect reconstruction filter bank is as shown
below:
2
_
z 2
_
z 2
2
_2
1.5
2.5
_2
1.5
2.5
_
z 1
_1
14.33 To show the system of Figure 14.18 is, in general, periodic with a period L, we need to
show that if Xˆ 1 ( z ) is the output for an input X1 ( z), and Xˆ 2 ( z ) is the output for an input
X 2 ( z), then if X 2 ( z ) = z − L X1 ( z ), i.e., x 2 [n] = x1[n − L ], then the corresponding output
satisfies Xˆ 2 ( z ) = z − L Xˆ 1 ( z ), i.e., xˆ 2 [n] = xˆ1[n − L ]. Now,
⎡ X (z) ⎤
⎢ X ( zW ) ⎥
Xˆ ( z ) = g T ( z)H ( m ) ( z) ⎢
⎥ , where g (z ) is the vector composed of the synthesis
M
⎢ X ( zW L −1 )⎥
⎣
⎦
bank filters given by Eq. (14.98) and H ( m ) ( z ) is the analysis filter bank modulation
Not for sale
559
⎡ X 2 ( z) ⎤
⎢ X 2 ( zW ) ⎥
matrix given Eq. (14.102). Now, Xˆ 2 ( z) = g T ( z)H ( m ) ( z ) ⎢
⎥
M
⎢
⎥
L
−
1
)⎦
⎣ X 2 ( zW
⎡ z − L X1 ( z ) ⎤
⎡ X1 ( z ) ⎤
⎢ −L
⎥
⎢ X1 ( zW ) ⎥
−L
= g T ( z )H ( m ) ( z ) ⎢ z X1 ( zW ) ⎥ = z − L g T ( z)H ( m ) ( z ) ⎢
⎥ = z Xˆ 1 ( z ). As a
M
M
⎢
⎥
⎢
L −1 ) ⎥
⎢⎣ z − L X1 ( zW L −1 )⎥⎦
⎣ X1 ( zW
⎦
result, the structure of Figure 14.18 is, in general, a time-varying system with a period of L.
14.34 H 0 ( z) = E 00 ( z 2 ) + z −1E 01 ( z 2 ), H1 ( z) = E10 ( z 2 ) + z −1E11 ( z 2 ). Thus,
⎡ E ( z ) E 01 ( z )⎤
E( z ) = ⎢ 00
.
⎣ E10 ( z ) E11 ( z ) ⎥⎦
(a) H 0 ( z) = E 0 ( z 2 ) + z −1E1 ( z 2 ). Hence, H1 ( z ) = H 0 (− z ) = E 0 ( z 2 ) − z −1E1 ( z 2 ).
Thus, E 00 ( z ) = E 0 ( z ), E 01 ( z ) = E1 ( z), E10 ( z) = E 0 ( z ), and E11 ( z) = − E1 ( z).
⎡ E ( z ) E1 ( z ) ⎤
Therefore, E( z ) = ⎢ 0
.
⎣ E 0 ( z ) − E1 ( z )⎥⎦
(b) Two cases need to be considered – N odd and N even. Consider first the N odd
case. For simplicity let H 0 ( z) = a 0 + a1z −1 + a2 z −2 + a3 z −3 . Then,
H1 ( z) = z −3 H 0 ( z −1 ) = z −3 (a 0 + a1z + a2 z 2 + a3 z 3 ) = a3 + a 2 z −1 + a1z −2 + a0 z −3 .
Thus, E 00 ( z) = E 0 ( z) = a0 + a 2 z −1 , E 01 ( z ) = E1 ( z) = a1 + a3 z −1 , and
E10 ( z ) = a3 + a1z −1 , E11 ( z) = a2 + a0 z −1 ⇒ E10 ( z) = z −1E1 ( z −1 ) and
E11 ( z) = z −1E 0 ( z −1 ).
Next, consider the N even case. Assume H 0 ( z ) = a0 + a1z −1 + a2 z −2 + a3 z −3 + a 4 z −4 .
Then,
H1 ( z) = z −4 H 0 ( z −1 ) = z −4 (a0 + a1z + a 2 z 2 + a3 z 3 + a 4 z 4 )
= a 4 + a3 z −1 + a2 z −2 + a1z −3 + a 0 z −4 . Thus,
E 00 ( z) = E 0 ( z) = a0 + a2 z −1 + a 4 z −2 , E 01 ( z) = E1 ( z) = a1 + a3 z −1 , and
E10 ( z ) = a 4 + a2 z −1 + a 0 z −2 , E11 ( z) = a3 + a1z −1 ⇒ E10 ( z ) = z −2 E 0 ( z −1 ) and
E11 ( z ) = z −1 E1 ( z −1 ).
In the general case, for N odd with N = 2 K + 1, E11 ( z) = z − K E 0 ( z −1 ) and
E (z)
E1 ( z )
⎡
⎤
E10 ( z ) = z − K E1 ( z −1 ) ⇒ E( z) = ⎢ − ( N −1) 0/ 2
.
−
1
−
(
N
−
1
)
/
2
−
1
E1 ( z ) z
E 0 ( z )⎥⎦
⎣z
Not for sale
560
Likewise, for N even with N = 2 K , E10 ( z) = z − K E 0 ( z −1 ) and
E ( z)
E1 ( z)
⎡
⎤
.
E11 ( z ) = z − ( K −1) E1 ( z −1 ) ⇒ E( z ) = ⎢ − N / 20
−
1
−
(
N
−
2
)
/
2
−
1
E 0 (z ) z
E1 ( z )⎥⎦
⎣z
14.35 (a) H 0 ( z ) = [A0 ( z 2 ) + z −1A1 ( z 2 )] and H1 ( z) = [A0 ( z 2 ) − z −1A1 ( z 2 )].
4
4
⎡A ( z ) A1 ( z ) ⎤
⎡ A ( z ) A1 ( z ) ⎤
Hence, E(z ) = ⎢ 0
, and R (z ) = ⎢ 1
.
⎥
−
A
z
A
z
(
)
(
)
1
⎣A0 ( z ) − A0 ( z )⎥⎦
⎣ 0
⎦
(b) To prove E(z ) is lossless, we need to show E† (e jω )E(e jω ) = c 2 I for some
1
1
constant c: E† (e jω )E(e jω ) =
⎡ A0* (e jω ) A0* (e jω )⎤ ⎡A0 (e jω ) A1 (e jω ) ⎤
⎢
jω
jω ⎥ ⎢
jω
jω ⎥
⎢⎣ A 1 (e ) − A1 (e ) ⎥⎦ ⎣A0 (e ) − A1 (e )⎦
⎤
⎡
jω ) 2 + A (e jω ) 2
A
(
e
0
0
0
⎥
⎢
=⎢
⎥ = 2I. Hence, E(z) is
2
2
j
ω
j
ω
0
A1 (e ) + A1 (e ) ⎥
⎢⎣
⎦
lossless.
(c) R ( z )E( z ) =
R ( z) =
1 ⎡ 2A 1( z )A 0 ( z )
0
4 ⎢⎣
0
⎤ A 1( z )A 0 ( z )
=
I. Therefore,
2A 1( z )A 0 ( z )⎥⎦
2
A1 ( z)A0 ( z) −1
E ( z).
2
(d) As in part (c), R ( z)E( z ) =
A1 ( z )A0 ( z)
I.
2
⎡ E ( z) E 01 ( z)⎤ ⎡ − 2 z − 2 + 8z −1 − 6 2 − z −1 ⎤
. Hence,
=⎢
14.36 E( z ) = ⎢ 00
− 3 + 2 z −1
1 ⎥⎦
⎣ E10 ( z) E11 ( z) ⎥⎦ ⎣
H 0 ( z) = E 00 ( z 2 ) + z −1E 01 ( z 2 ) = −6 + 2 z −1 + 8z −2 − z −3 − 2 z −4 and
H1 ( z) = E10 ( z 2 ) + z −1E11 ( z 2 ) = −3 + z −1 + 2 z −2 .
Now, det(E(z)) = ( −2 z −2 + 8 z −1 − 6) − (2 − z −1 )( −3 + 2 z −1 ) = z −1 . From Eq.
(14.133) we have
−K ⎡
⎡ R ( z ) R01 ( z )⎤
− 2 z − 2 + 8 z −1 − 6 − 2 + z −1 ⎤
− K E −1 ( z ) = cz
cz
R ( z ) = ⎢ 00
=
⎥
⎢
3 − 2 z −1
1
⎣ R10 ( z ) R11 ( z ) ⎥⎦
z −1 ⎣
⎦
−2
−1
−1 ⎤
⎡
= ⎢ − 2 z + 8z−1 − 6 − 2 + z ⎥ for K = 1 and c = 1. Therefore,
3 − 2z
1
⎦
⎣
G0 ( z) = R00 ( z 2 ) + z −1 R01 ( z 2 ) = −6 − 2 z −1 + 8z −2 + z −3 − 2 z −4 and
G1 ( z) = R10 ( z 2 ) + z −1 R11 ( z 2 ) = 3 + z −1 − 2 z −2 .
Not for sale
561
⎡2 − 2 1 ⎤
14.37 P = ⎢3 1 − 2⎥. From Eqs. (14.121) and (14.122a) to (14.122c), we thus get
⎢⎣2 4
2 ⎥⎦
⎡ H 0 ( z )⎤ ⎡2 − 2 1 ⎤ ⎡ 1 ⎤
⎢ H1 ( z ) ⎥ = ⎢ 3 1 − 2 ⎥ ⎢ z −1 ⎥ , resulting in the analysis filters
⎢ H ( z )⎥ ⎢⎣2 4
2 ⎥⎦ ⎢⎣ z − 2 ⎥⎦
⎣ 2 ⎦
H 0 ( z ) = 2 − 2 z −1 + z −2 , H1 ( z) = 3 + z −1 − 2 z −2 , H 2 ( z) = 2 + 4 z −1 + 2 z −2 .
0.64 0.24⎤
⎡ 0.8
Now, 4P −1 = ⎢ − 0.8 0.16 0.56⎥. Using Eqs. (14.124) and (14.125a) to (14.125c),
⎢⎣ 0.8 − 0.96 0.64⎥⎦
0.64 0.24⎤
⎡ 0.8
we arrive at [G0 ( z ) G1 ( z ) G2 ( z)] = z − 2 z −1 1 ⎢ − 0.8 0.16 0.56⎥ , leading to
⎢⎣ 0.8 − 0.96 0.64⎥⎦
the synthesis filters G0 ( z ) = 0.8 − 0.8z −1 + 0.8z −2 , G1 ( z) = −0.96 + 0.16 z −1 + 0.64 z −2 ,
[
]
G 2 ( z ) = 0.64 + 0.56 z −1 + 0.24 z −2 .
⎡1 − 2 3 − 1⎤
1
0 ⎥. For y[ n] = 4 x[ n − 3] to hold, we require
14.38 R ( z) = ⎢2 1
⎢0 3 − 1 1 ⎥
⎢⎣1 1 − 1 2 ⎥⎦
R ( z )E( z ) = 4I. Hence,
⎡ − 1.4118 2.5882
0.2353
= ⎢ 0.2353
⎢ 2.5882 − 1.4118
⎢⎣ 1.8824 − 2.1176
14.39
⎡1 − 2 3 − 1⎤
1
0⎥
E( z ) = 4[R ( z )] −1 = 4 ⎢2 1
⎢0 3 − 1 1 ⎥
⎢⎣1 1 − 1 2 ⎥⎦
− 1.8824 0.2353 ⎤
1.6471 − 0.7059⎥.
2.1176
0.2353 ⎥
1.1765
2.3529 ⎥⎦
−1
⎡1 2 2 ⎤
z −1 1 ⎢3 − 3 1⎥. Therefore,
⎢⎣2 1 2⎥⎦
H 0 ( z ) = 2 + 3z −1 + z −2 , H1 ( z) = 1 − 3z −1 + 2 z −2 , H 2 ( z) = 2 + z −1 + 2 z −2 . The
[H 0 (z)
[
H1 ( z) H 2 ( z)] = z − 2
]
⎡2 3 1 ⎤
corresponding Type 1 polyphase component matrix is thus given by E( z) = ⎢1 − 3 2⎥.
⎢⎣2 1 2⎥⎦
For perfect reconstruction we require the Type 2 polyphase component matrix to be given
5 / 3 − 3⎤
⎡ 8/3
by R ( z ) = [E( z)]−1 = ⎢ − 2 / 3 − 2 / 3 1 ⎥. Hence, the synthesis filters are obtained from
⎢⎣ − 8 / 3 4 / 3
3 ⎥⎦
Not for sale
562
[G 0 (z)
5 / 3 − 3⎤
⎡ 8/3
z −1 1 ⎢ − 2 / 3 − 2 / 3 1 ⎥ resulting in
⎢⎣ − 8 / 3 4 / 3
3 ⎥⎦
[
]
G1 ( z ) G 2 ( z )] = z − 2
G 0 ( z) = − − z −1 + z − 2 , G1 ( z ) =
8
3
2
3
8
3
4
3
− z −1 + z − 2 , and G 2 ( z ) = 3 + z −1 + 3z −2 .
3
3
2
5
1 1
2 ⎤
1 − 1 − 2⎥. For perfect reconstruction we require
1 2 − 1⎥
3 1
2 ⎥⎦
0.5
0
− 0.5 ⎤
⎡ 1
1
1
0
25
0
1.25 ⎥. Thus,
.
−
⎢
R ( z ) = E −1 ( z ) =
⎢
0
4
0
95
1
2
0.05 ⎥
.
.
.
−
−
3
⎢⎣ 1.2 − 0.15 − 0.6 − 0.15⎥⎦
⎡2
14.40 E( z) = ⎢ 3
⎢3
⎢⎣1
[G 0 (z)
G 1 ( z ) G 2 ( z ) G 3 ( z )] =
1
3
[
z−3
z−2
z −1
0.5
0
− 0.5 ⎤
⎡ 1
1
0
25
0
1.25 ⎥.
.
−
⎢
1
⎢ − 0.4 − 0.95 1.2
0.05 ⎥
⎢⎣ 1.2 − 0.15 − 0.6 − 0.15⎥⎦
]
Hence,
G0 ( z) = (1.2 − 0.4 z −1 − z − 2 + z − 3 ), G1 ( z ) = (−0.15 − 0.95z −1 + 0.25z − 2 + 0.5z − 3 ),
G2 ( z )
1
3
1
= (−0.6 + 1.2 z −1 ), G3 ( z )
3
1
3
= (−0.15 + 0.05z −1 + 1.25z − 2 − 0.5z − 3 ).
1
3
14.41 G0 ( z) = −2 + 3z −1 + 2 z −2 , G0 ( z ) = 3 + z −1 − 2 z −2 , G0 ( z ) = 2 − z −1 + z −2 .
Rewriting these equations in an matrix form we get
⎡ 2 −2 2 ⎤
[G 0 (z) G1(z) G 2 (z)] = z − 2 z −1 1 ⎢ 3 1 − 1⎥. This implies,
⎢⎣ − 2 3
1 ⎥⎦
⎡ 2 −2 2 ⎤
R ( z) = ⎢ 3
1 − 1⎥. For perfect reconstruction we require
1 ⎦⎥
⎣⎢ − 2 3
[
]
0.25
0 ⎤
⎡ 0.125
E( z ) = R −1 ( z) = ⎢ − 0.0313 0.1875 0.25⎥. Hence,
⎣⎢ 0.3438 − 0.0625 0.25⎥⎦
⎡ H 0 ( z)⎤ ⎡ 0.125
0.25
0 ⎤⎡ 1 ⎤
⎢ H1 ( z) ⎥ = ⎢ − 0.0313 0.1875 0.25⎥ ⎢ z −1 ⎥ implying
⎢ H ( z)⎥ ⎢⎣ 0.3438 − 0.0625 0.25⎥⎦ ⎢ z − 2 ⎥
⎣ 2 ⎦
⎦
⎣
H 0 ( z) = 0.125 + 0.25z −1 , H1 ( z ) = −0.0313 + 0.1875z −1 + 0.25z −2 ,
H1 ( z ) = 0.3438 − 0.0625 z −1 + 0.25z −2 .
14.42 If the filter bank is alias-free, then
Not for sale
563
H1 ( z )
H L −1 ( z) ⎤ ⎡ G0 ( z) ⎤ ⎡T ( z )⎤
L
⎡ H 0 ( z)
⎢ H 0 ( zW )
H1 ( zW )
H L −1 ( zW ) ⎥ ⎢ G1 ( z) ⎥ ⎢ 0 ⎥
L
⎥⎢
⎢
⎥ = ⎢ M ⎥ The above
M
M
O
M
M
⎢
⎥ ⎢
⎥
L −1 ) H ( zW L −1 ) L H
L − 1 ) ⎥ ⎢G
1
L −1 ( zW
⎦ ⎣ L −1 ( z )⎦ ⎣ 0 ⎦
⎣ H 0 ( zW
L equations are
(1): H 0 ( z)G0 ( z) + H1 ( z)G1 ( z) + K + H L −1 ( z )G L −1 ( z) = T ( z),
(2): H 0 ( zW r )G0 ( z) + H1 ( zW r )G1 ( z) + K + H L −1 ( zW r )G L −1 ( z) = 0, 1 ≤ r ≤ L − 1.
Replacing z by zW L − r in the above equation we get
H 0 ( zW L )G0 ( zW L − r ) + H1 ( zW L )G1 ( zW L − r ) + K + H L −1 ( zW L )G L −1 ( zW L − r ) = 0,
or equivalently,
(3): H 0 ( z )G0 ( zW L − r ) + H1 ( z)G1 ( zW L − r ) + K + H L −1 ( z )G L −1 ( zW L − r ) = 0,
0 ≤ r ≤ L − 1. Rewriting Eqs. (1) and (3) in matrix form we get
G1 ( z )
G L −1 ( z) ⎤ ⎡ H 0 ( z ) ⎤ ⎡T ( z)⎤
L
⎡ G0 ( z )
⎢ G0 ( zW )
G1 ( zW )
G L −1 ( zW ) ⎥ ⎢ H1 ( z ) ⎥ ⎢ 0 ⎥
L
⎢
⎥⎢
⎥ = ⎢ M ⎥.
M
M
O
M
M
⎢
⎥ ⎢
⎥
L −1 ) G ( zW L −1 ) L G
L −1 )⎥ ⎢ H
L −1 ( zW
1
⎣G0 ( zW
⎦ ⎣ L −1 ( z ) ⎦ ⎣ 0 ⎦
Thus, if an L-channel filter bank is alias-free with a given set of analysis and synthesis
filters, then the filter bank is still alias-free if the analysis and synthesis filters are
interchanged.
14.43 An equivalent representation of the structure of Figure P14.6 is shown below
⎡1 0 L 0 ⎤
⎢0 1 L 0 ⎥
where Γ m = ⎢ M M O M ⎥ .
⎢⎣0 0 L z −1 ⎥⎦
X(z)
L
_
z1
L
_1
z
_1
Γ1
S0
S1
Γ2
ΓK
SK
L
z
L
The corresponding synthesis bank for designing an L-channel perfect
−1
and
reconstruction bank is thus as shown below where Tm = S m
⎡ z −1
⎢
Λ m = z −2 Γ −m1 = ⎢ 0
⎢ M
⎣ 0
0
z
−1
M
0
L
L
O
L
0⎤
⎥
0⎥.
M⎥
1⎦
Not for sale
564
L
_1
z
+
L
ΛK
TK
_1
Λ2
Λ1
T1
z
T0
+
L
_1
z
L
+
⎡ H 0 ( z ) ⎤ ⎡1 − 2 3 ⎤ ⎡1 0 0 ⎤ ⎡ 3 − 5 3 ⎤ ⎡ 1 ⎤
14.44 ⎢ H 1 ( z ) ⎥ = ⎢0 1 − 2⎥ ⎢0 1 0 ⎥ ⎢− 1 3 − 2⎥ ⎢ z −1 ⎥
⎢ H ( z )⎥ ⎣⎢0 0
1 ⎦⎥ ⎢0 0 z −1 ⎥ ⎣⎢ 0 − 1 1 ⎦⎥ ⎢ z − 2 ⎥
⎣ 2 ⎦
⎦
⎣
⎣
⎦
⎡ 5 − 11 − 3 z −1 7 + 3 z −1 ⎤ ⎡ 1 ⎤
⎢
⎥
= ⎢ − 1 3 + 2 z −1
− 2 − 2 z −1 ⎥ ⎢ z −1 ⎥. Hence, H 0 ( z ) = 5 − 11z −1 + 4 z −2 + 3 z −3 ,
⎢
⎥
− z −1
z −1 ⎥ ⎣ z − 2 ⎦
⎢⎣ 0
⎦
H 1 ( z ) = −1 + 3 z −1 − 2 z −3 , H 2 ( z ) = − z −2 + z −3 .
[G0 ( z )
[
= z −2
[
G1 ( z ) G2 ( z )] = z
]
⎡1 − 2 3 ⎤
z −1 1 ⎢0 1 − 2 ⎥
1 ⎥⎦
⎢⎣0 0
−2
− 1 ⎡ z −1
⎢
⎢ 0
⎢⎣ 0
0
z
−1
0
0 ⎤ ⎡ 3 − 5 3 ⎤ −1
⎥
0⎥ ⎢− 1 3 − 2⎥
1 ⎥ ⎢⎣ 0 − 1 1 ⎥⎦
⎦
⎡3 z −1 + 1 8 z −1 + 3 7 z −1 + 4 ⎤
⎥
⎢
z −1 1 ⎢ z −1 + 2 3 z −1 + 6 3 z −1 + 8 ⎥. Hence,
3
4
⎥⎦
⎢⎣ 1
]
G0 ( z ) = 1 + 2 z −1 + 2 z −2 + 3 z −3 , G1 ( z ) = 3 + 6 z −1 + 6 z −2 + 8 z −3 ,
G 2 ( z ) = 4 + 8 z −1 + 7 z − 2 + 7 z −3 .
14.45 Figure 14.20 with internal variables labeled is shown below:
x[n]
L
_1
z
L
c0 [n]
b 0[n]
c1 [n]
b 1[n]
L
L
_1
z
L
cL _ 1[n]
+
_
z1
P(z)
_
z1
_
z1
bL _ 1[n]
Not for sale
_
z1
L
+
y[n]
565
From the above figure it follows that we can express the z-transforms of {cl [ n]} as
C l ( z) =
L −1
∑
1
( z1 / L W k ) − l X (( z1 / L W k ), 0 ≤ l ≤ L − 1, where W = e − j 2π / L .
L l=0
Likewise, the z-transforms of {b s [n]} can be expressed as
Bs ( z ) =
L −1
∑ Ps, l (z)Cl (z), 0 ≤ s ≤ L − 1, where Ps,l (z) denotes the z-transforms the
s=0
( s, l ) –th element of P (z ). Finally, the z-transform of the output y[n] is given by
Y (z) =
L −1
∑
z − ( L −1− s ) B
s
(z L )
=
L −1
∑
z − ( L −1− s )
L −1
∑ Ps, l (z L )Cl (z L )
s=0
s=0
l=0
L −1
L −1
L −1
1
=
z − ( L −1− s )
Ps , l ( z L ) ( zW k ) − l X ( zW k )
L s=0
k =0
l=0
L −1
L −1
L −1
1
=
X ( zW k ) W − kl
z − ( L −1− s ) z − l Ps, l ( z L ).
L k =0
l=0
s=0
In the above expression, terms of the form X ( zW k ), k ≠ 0,
∑
∑
∑
∑
∑
∑
represent the
contribution coming from aliasing. Hence, the expression for Y (z ) is free from
these aliasing terms for any arbitrary input x[n ] if and only if
L −1
L −1
l=0
s=0
∑
W − kl
∑ z − ( L −1− s) z − l Ps, l (z L ) = 0, k ≠ 0.
⎡ V0 ( z ) ⎤ ⎡T ( z)⎤
⎥ ⎢
⎥
The above expression can be written in a matrix form as D ⎢ V1 ( z ) ⎥ = ⎢ 0 ⎥ ,
M
M
⎢V
⎥ ⎢
⎥
⎣ L −1 ( z )⎦ ⎣ 0 ⎦
where D is the DFT matrix, T (z ) is transfer function of the alias-free system, and
†⎢
Vl ( z) =
L −1
∑ z − l z − (L −1− s) Ps, l (z L ). Since DD
†
= LI, the above matrix equation can
s=0
⎡ V0 ( z ) ⎤
⎡T ( z)⎤
⎢ V1 ( z) ⎥
⎥
⎢
be alternately written as ⎢
= D⎢ 0 ⎥. This implies that
M
M ⎥
⎢V
⎥
⎢⎣ 0 ⎥⎦
⎣ L −1 ( z )⎦
Vl ( z) = V ( z ), 0 ≤ l ≤ L − 1, as the first column of D has all elements equal to 1. As
a result, the L-channel QMF bank is alias-free if and only if Vl ( z) is the same for
all l.
The two figures below show the polyphase realizations of V0 ( z ) and V1 ( z) :
Not for sale
566
P 0,0 (z L )
P 0,1 (z L )
_1
z
P1,0 (z L )
_
z1
P1,1 (z L )
_1
z
_
z1
_
z1
_
z1
PL _ 1,0(z L )
y[n]
PL _ 1,1(z L )
y[n]
(b) V1 ( z)
(a) V0 ( z)
The realization of V1 ( z) can be redrawn as indicated below:
P1,1 (z L )
_
z1
P 2,1 (z L )
_
z1
_
z1
_
z LP 0,1 (z L )
y[n]
(c) V1 ( z)
Because of the constraint V0 ( z) = V1 ( z ), the polyphase components in Figures (a)
and (c) should be the same. From these two figures it follows that the first column
of P (z ) is an upwards-shifted version of the second column, with the topmost
element appearing with a z −1 attached. This type of relation holds for the k-th
column and the (k + 1) –th column of P (z ) . As a result, P (z ) is a pseudo-circulant
matrix of the form of Eq. (14.155).
14.46 H 0( z ) = E 0 ( z 2 ) + z −1 E 1( z 2 ), H 1( z ) = E 0 ( z 2 ) − z −1 E 1( z 2 ). Hence,
⎡ E ( z ) E1 ( z ) ⎤
E( z ) = ⎢ 0
. Likewise,
⎣ E 0 ( z ) − E1 ( z )⎥⎦
G 0 ( z ) = E 0 ( z 2 ) + z −1 E 1( z 2 ) = z −1 R 00 ( z 2 ) + R10 ( z 2 ),
G 1 ( z ) = − E 0 ( z 2 ) + z −1 E 1( z 2 ) = z −1 R 01 ( z 2 ) + R11 ( z 2 ). Hence,
⎡ R ( z ) R01 ( z )⎤ ⎡ E1 ( z ) E1 ( z ) ⎤
R ( z ) = ⎢ 00
. Therefore,
=
⎣ R10 ( z ) R11 ( z ) ⎥⎦ ⎢⎣ E0 ( z ) − E 0 ( z )⎥⎦
Not for sale
567
0
⎤
⎡ E ( z ) E1 ( z ) ⎤ ⎡ E0 ( z ) E1 ( z ) ⎤ ⎡2 E0 ( z ) E1 ( z )
=⎢
P ( z ) = R ( z ) E( z ) = ⎢ 1
⎢
⎥
⎥⎦.
⎥
E
z
E
z
(
)
(
)
−
−
E
z
E
z
0
2
E
z
E
z
(
)
(
)
(
)
(
)
0
1
0
1
⎣ 0
⎦⎣ 0
⎦ ⎣
Here, P0 ( z ) = 2 E0 ( z ) E1 ( z ) and P1 ( z ) = 0. As a result, P(z) is pseudo-circuluant.
14.47 (a) H 0 ( z ) = 1 − 2 z −1 + 4.5 z −2 + 6 z −3 + z −4 + 0.5 z −5 ,
H 0 ( z −1 ) = 0.5 z 5 + z 4 + 6 z 3 + 4.5 z 2 − 2 z + 1. Therefore,
H 0 ( z ) H 0 ( z −1 ) = 0.5 z 5 + 6.25 z 3 + 22.5 z + 62.5 + 22.5 z −1 + 6.25 z −3 + 0.5 z −5 . Thus,
H 0 ( z ) H 0 ( z −1 ) + H 0 ( − z ) H 0 ( − z −1 ) = 125. Hence, H 0 (z ) is a power-symmetric function.
The highpass analysis filter is given by
H 1 ( z ) = z −5 H 0 (− z −1 ) = −0.5 + z −1 − 6 z −2 + 4.5 z −3 + 2 z −4 + z −5 . The two synthesis
filters are time-reversed versions of the analysis filters as per Eq. (14.92):
G0 ( z ) = 2 z −5 H 0 ( z −1 ) = 1 + 2 z −1 + 12 z −2 + 9 z −3 − 4 z −4 + 2 z −5 and
G1 ( z ) = 2 z −5 H 1 ( z −1 ) = 2 + 4 z −1 + 9 z −2 − 12 z −3 + 2 z −4 − z −5 .
1
15
15
1
(b) H 0 ( z ) = 1 + z −1 + z − 2 − z − 4 + 2 z − 5 , H 0 ( z −1 ) = 2 z 5 − z 4 + z 2 + z + 1.
2
4
4
2
Therefore,
H 0 ( z ) H 0 ( z −1 ) = 2 z 5 + 10.75 z 3 − 3.375 z + 20.3125 − 3.375 z −1 + 10.75 z −3 + 2 z −5 . Thus,
H 0 ( z ) H 0 ( z −1 ) + H 0 (− z ) H 0 (− z −1 ) = 40.625. Hence, H 0 (z ) is a power-symmetric
function. The highpass analysis filter is given by
1
15
H 1 ( z ) = z − 5 H 0 (− z −1 ) = −2 − z −1 + z − 3 − z − 4 + z − 5 . The two synthesis filters are
2
4
time-reversed versions of the analysis filters as per Eq. (14.92):
G0 ( z ) = 2 z − 5 H 0 ( z − 1 ) = 4 − 2 z − 1 +
G1 ( z ) = 2 z − 5 H 1 ( z −1 ) = 2 − z −1 +
15 − 3
z
2
+ z − 4 + 2 z − 5 and
15 − 2
z − 2z −4 − 4z −5.
2
14.48 H 0 ( z) = 1 + az −1 + z −2 and H1 ( z ) = 1 + az −1 + bz −2 + az −3 + z −4 . The corresponding
synthesis filters are given by G0 ( z) = H1 (− z) = 1 − az −1 + bz −2 − az −3 + z −4 , and
G1 ( z) = − H 0 (− z) = −1 + az −1 − z −2 .
To show that the filter bank is alias-free and satisfies the perfect reconstruction property we
⎡ H ( z ) H 0 (− z )⎤ ⎡G0 ( z )⎤ ⎡cz − K ⎤
need to show that ⎢ 0
=
, where c ≠ 0. Now,
⎣ H 0 (− z ) H1 (− z ) ⎥⎦ ⎢⎣ G1 ( z ) ⎥⎦ ⎢⎣ 0 ⎥⎦
H 0 ( z )G0 ( z) + H1 ( z)G1 ( z) = (1 + az −1 + z −2 )(1 − az −1 + z −2 − az −3 + z −4 )
+ (−1 + az −1 − z −2 )(1 + az −1 + z −2 + az −3 + z −4 ) = 2 a (b − 2) z −3 , and
H 0 (− z)G0 ( z ) + H1 ( z)G1 (− z) = H 0 (− z ) H1 (− z) − H 0 (− z ) H1 (− z) = 0. Thus, if a ≠ 0 and
Not for sale
568
b ≠ 2, the above filter bank is alias-free and also satisfies the perfect reconstruction
property.
14.49 If H 0 ( z) is required to have 2 zeros at z = −1, then it is of the form
H 0 ( z) = (1 + z −1 ) 2 C ( z), where C (z ) is a first-order polynomial. Now,
P ( z) = H 0 ( z) H 0 ( z −1 ) = (1 + z −1 ) 2 (1 + z) 2 R( z), where R (z ) is a zero-phase
polynomial of the form R ( z ) = az + b + az −1 . For perfect reconstruction we
require, P ( z ) + P (− z ) = 2, i.e.,
(1 + z −1 ) 2 (1 + z ) 2 ( az + b + az −1 ) + (1 − z −1 ) 2 (1 − z ) 2 ( − az + b − az −1 ) = 2. Since
the above equation must hold for all z, we observe that at z = 1, we get
1
8
1
4
2a + b = . Likewise, at z = j , we get b = . Hence, a = −
P ( z) = (1 + z −1 ) 2 (1 + z) 2 (−
1
16
z+
1
4
−
1 −1
z ).
16
1
.
16
Therefore,
The analysis filter H 0 ( z) is
obtained by a spectral factorization of P(z). Three choices of spectral factorization
resulting in linear-phase analysis filters are given in Section 14.3.3.
14.50
14.51 (a) An orthogonal perfect reconstruction filter bank is obtained by choosing the
minimum-phase spectral factor of P(z) as the lowpass analysis filter H 0 ( z ) and then
determining the lowpass synthesis filter G0 ( z ) using the relation
G0 ( z) = z −5 H 0 ( z −1 ). The minimum-phase spectral factor of P(z) is given by
H 0 ( z) = 0.33267(1 + z −1 ) 3 (1 − 0.5745z −1 + 0.1059z −2 ). Hence,
G0 ( z ) = z −5 H 0 ( z −1 ) = 0.33267(1 + z −1 ) 3 (0.1059 − 0.5745z −1 + z −2 ).
(b) A perfect reconstruction filter bank with symmetric lowpass analysis and
synthesis filters of even length is given by
H 0 ( z ) = (1 + z −1 )(a + bz −1 + cz −2 + bz −3 + az −4 ) and G0 ( z) = (1 + z −1 ) 5 .
Another possible design of a perfect reconstruction filter bank with symmetric
lowpass analysis and synthesis filters of even length is given by
H 0 ( z ) = (1 + z −1 ) 3 (a + bz −1 + cz −2 + bz −3 + az −4 ) and G0 ( z) = (1 + z −1 ) 3 .
(c) A perfect reconstruction filter bank with symmetric lowpass analysis and
synthesis filters of odd length is given by
H 0 ( z ) = (a + bz −1 + cz −2 + bz −3 + az −4 ) and G0 ( z) = (1 + z −1 ) 6 . Another
possible design of a perfect reconstruction filter bank with symmetric lowpass
analysis and synthesis filters of odd length is given by
H 0 ( z) = (1 + z −1 ) 2 (a + bz −1 + cz −2 + bz −3 + az −4 ) and G0 ( z) = (1 + z −1 ) 4 .
Not for sale
569
14.52
14.53
14.54 The polyphase matrices for the structure of Figure P14.7(a) are given by
0⎤. Therefore,
0⎤ and R ( z) = ⎡ 1
E( z ) = ⎡ 1
⎢⎣ − P ( z) 1⎥⎦
⎢⎣ P ( z) 1⎥⎦
0⎤ ⎡ 1
0⎤ = ⎡1 0⎤. Hence, the structure of Figure
R ( z ) E( z ) = ⎡ 1
⎢⎣ − P ( z) 1⎥⎦ ⎢⎣ P ( z ) 1⎥⎦ ⎢⎣0 1⎥⎦
P14.7(a) is a perfect reconstruction QMF bank.
14.55 The polyphase matrices for the structure of Figure P14.7(b) are given by
1 Q( z )⎤ ⎡ 1
0⎤ and R ( z) = ⎡ 1
0⎤ ⎡1 − Q( z)⎤. Therefore,
E( z ) = ⎡⎢
⎥
1
(
)
−
P
(
z
)
P
z
1⎥⎦ ⎢⎣0
⎢
⎥
⎢
0
1
1 ⎥⎦
⎦
⎣
⎣
⎦⎣
0 ⎤ ⎡1 − Q( z )⎤ ⎡1 Q( z )⎤ ⎡ 1
0⎤ = ⎡ 1
0⎤ ⎡1 0⎤ ⎡ 1
0⎤
R ( z ) E( z ) = ⎡ 1
⎢⎣ − P ( z) 1⎥⎦ ⎢⎣0
1 ⎥⎦ ⎢⎣0
1 ⎥⎦ ⎢⎣ P ( z ) 1⎥⎦ ⎢⎣ − P ( z) 1⎥⎦ ⎢⎣0 1⎥⎦ ⎢⎣ P ( z) 1 ⎥⎦
= ⎡1 0⎤ Hence, the structure of Figure P14.7(b) is a perfect reconstruction QMF
⎢⎣0 1⎥⎦
bank.
14.56 If the 2-channel QMF banks in the middle of the structure of Figure 14.24 are of
perfect reconstruction type, then each of these two filter banks have a distortion
transfer function of the form αz − M , where M is a positive integer.
H10 (z)
2
2
G10(z)
_
H11(z)
2
2
_
αz M
G11(z)
Likewise, the 2-channel analysis filter bank on the left with the 2-channel synthesis
filter bank on the right form a perfect reconstruction QMF bank with a distortion
transfer function βz − L , where L is a positive integer:
HL (z)
2
2
GL (z)
__
HH(z)
2
2
_
βz L
GH(z)
Hence, an equivalent representation of Figure 14.24 is as indicated below:
Not for sale
570
HL (z)
2
_
αz M
2
GL (z)
HH(z)
2
_
αz M
2
GH(z)
which reduces to
HL (z)
2
GL (z)
2
_
αz 2M
_
αz 2M
2
HH(z)
_
βz L
GH(z)
2
Thus, the overall structure is also of perfect reconstruction type with have a
distortion transfer function given by αβz − (2 M + L ) .
14.57 We analyze the 3-channel filter bank of Figure 14.27(b). If the 2-channel QMF
bank of Figure 14.27(a) is of perfect reconstruction type with a distortion transfer
function βz − L , the structure of Figure 14.27(b) should be implemented as indicated
below to ensure perfect reconstruction:
H 0 (z)
H 0 (z)
H1 (z)
*
2
G 0 (z)
2
+
H1 (z)
x[n]
2
2
2
G 0 (z)
2
G1 (z)
G1 (z)
_
βz L
2
2
+
y[n]
An equivalent representation of the above structure is as shown below:
x[n]
H 0 (z)
2
_
βz L
2
G 0 (z)
H1 (z)
2
_
βz L
2
G1 (z)
+
y[n]
+
y[n]
which reduces to
x[n]
_
βz 2L
H 0 (z)
2
2
G 0 (z)
H1 (z)
2
2
G1 (z)
verifying the perfect reconstruction property.
In a similar manner, the perfect reconstruction property of Figure 14.27(c) can be
proved.
Not for sale
571
M14.1 The specifications of the corresponding zero-phase half-band filter are as follows:
stopband edge ωs = 0.65π and a minimum stopband attenuation of
α s = 2 × 30 + 6.02 = 66.02 dB. The desired stopband ripple is therefore
δs = 10 − α s / 20 = 10 −3.301 = 0.0005. The passband edge of the half-band filter is at
ω p = π − 0.6π = 0.4π. Using the function remezord we then estimate the order
of F(z) and using the function remez we next design Q(z). To this end the code
fragments used are
[N,fpts,mag,wt]=remezord([0.4 0.6],[1 0],[0.0005 0.005]);
The order of F(z) is found to be 30 which is of the form 4 K + 2 = N for K = 4. The
order of H 0 ( z) is therefore 15. The filter Q(z) is designed using the statement
[q,err]=remez(N,fpts,mag,wt);
To determine the coefficients { f [ n]} of the filter F(z) we add err to the central
coefficient q[16]. Next using the statement h0 = firminphase(f); we
determine the minimum-phase spectral factor of F(z) which are the coefficients of
the lowpass analysis filter H 0 (z ) :
Columns 1 through 7
0.2818
0.5076
0.3582
0.0083
0.1047
Columns 8 through 14
-0.0089
-0.0663
0.0122
0.0319
0.0335
Columns 15 through 16
-0.0121
0.0008
-0.0386
-0.1749
0.0418
-0.0134
-
The highpass analysis filter H 1 (z ) is obtained using the code fragments
k = 0:15;
h1 = ((-1).^k).*h0;
The synthesis filters G0 (z ) and G1 (z ) can be found from the analysis filters using
the code fragments
G0 = fliplr(h0);
G1 = fliplr(h1);
Plots of the roots of and the gain responses of the two analysis filters are shown
below:
Not for sale
572
H0(z)
0
0.5
Gain, dB
Imaginary Part
1
15
0
-0.5
H1(z)
-20
-40
-1
-1
-0.5
0
0.5
Real Part
1
-60
0
0.2
0.4
0.6
0.8
1
ω/π
M14.2 The following MATLAB programs can be used to design the analysis filters
corresponding to a two-channel QMF paraunitary lattice filter bank. (The program uses
the function fminu from the MATLAB Optimization Toolbox, which in turn uses the
functions cubici2, cubici3, optint, searchq, and updhess.)
% Program for the design of a two-channel QMF
% lattice filter bank.
Len = input('The length of the filter = ');
if (mod(Len,2) ~= 0)
sprintf('Length has to be an even number')
Len = Len+1;
end
ord = Len/2-1;
ws = 0.55*pi;
kinit = [1;zeros([ord,1])];
% set the parameters for the optimization routine
options = optimset('MaxIter', 2500, 'Display', 'off');
kfin = fminunc('filtopt',kinit,options,Len,ws);
e00old = 1;
e01old = kfin(1);
e10old = -kfin(1);
e11old = 1;
for k = 2:length(kfin)
e00new = [e00old 0]-kfin(k)*[0 e01old];
e01new = kfin(k)*[e00old 0]+[0 e01old];
e10new = [e10old 0]-kfin(k)*[0 e11old];
e11new = kfin(k)*[e10old 0]+[0 e11old];
e00old = e00new;
e01old = e01new;
e10old = e10new;
e11old = e11new;
end
E1 = [e00old;e01old];
h0 = E1(:);
scale_factor = abs(sum(h0));
h0 = h0/scale_factor;
E2 = [e10old;e11old];
h1 = E2(:);
Not for sale
573
h1 = h1/scale_factor;
[H0,W] = freqz(h0,1,1024);
[H1,W] = freqz(h1,1,1024);
plot(W/pi,20*log10(abs(H0)), W/pi, 20*log10(abs(H1)));
grid on
title('Gain response of the analysis filters');
xlabel('\omega/\pi'); ylabel('Gain, dB');
function val = filtopt(kval,Len,ws)
e00old = 1;
e01old = kval(1);
e10old = -kval(1);
e11old = 1;
for k = 2:length(kval)
e00new = [e00old 0]-kval(k)*[0 e01old];
e01new = kval(k)*[e00old 0]+[0 e01old];
e10new = [e10old 0]-kval(k)*[0 e11old];
e11new = kval(k)*[e10old 0]+[0 e11old];
e00old = e00new;
e01old = e01new;
e10old = e10new;
e11old = e11new;
end
E1 = [e00old;e01old];
h0 = E1(:);
[H0,W] = freqz(h0,1,1024);
val = 0;
for k = 1:length(W)
if (W(k) > ws)
val = val+abs(H0(k))^2;
end
end
Due to the non-linear nature of the function to be optimized, different values of kinit
should be used to optimize the analysis filter's gain response. The gain responses of the
two analysis filters is as shown below. From the gain responses, the minimum
stopband attenuation of the analysis filters is observed to be about 23 dB.
Gain response of the analysis filters
10
H0(z)
Gain, dB
0
H1(z)
-10
-20
-30
-40
0
0.2
0.4
0.6
0.8
1
ω/ π
Not for sale
574
M14.3 The MATLAB program used to generate the prototype lowpass filter and the analysis
filters of the 4-channel uniform DFT filter bank is given below:
L = 19; f = [0 0.15 0.35 1]; m = [1 1 0 0]; w = [10 1];
N = 4; WN = exp(-2*pi*j/N);
plottag = ['- ';'--';'-.';': '];
h = zeros(N,L);
n = 0:L-1;
h(1,:) = remez(L-1, f, m, w);
for i = 1:N-1
h(i+1,:) = h(1,:).*(WN.^(-i*n));
end;
clf;
for i = 1:N
[H,w] = freqz(h(i,:), 1, 256, 'whole');
plot(w/pi, abs(H), plottag(i,:));
hold on;
end;
grid on;
hold off;
xlabel('\omega/\pi');ylabel('Magnitude');
title('Magnitude responses of the analysis filter bank');
The plots generated by the above program is given below:
Magnitude responses of the analysis filter bank
Magnitude
1
H0(z) H1(z)
H2(z)
H3(z)
H0(z)
0.8
0.6
0.4
0.2
0
0
0.5
1
1.5
2
ω/ π
M14.4 The first 8 impulse response coefficients of Johnston's 16A lowpass filter H L (z ) are
given by
0.001050167, –0.005054526, –0.002589756, 0.0276414, –0.009666376, –0.09039223,
0.09779817, 0.4810284
The remaining 8 coefficients are given by flipping the coefficients left to right, From Eq.
(14.98), the highpass filter in the tree-structured 3-channel filter bank is given by
H 2 ( z ) = H H ( z ) = z −15 H L ( z −1 ). The two remaining filters are given by
H 0 ( z ) = H L ( z ) H L ( z 2 ) and H 1 ( z ) = H L ( z ) H H ( z 2 ). The MATLAB program used to
generate the gain plots of the 3 analysis filters is given by:
Not for sale
575
G1 = [0.10501670e-2 -0.50545260e-2 -0.25897560e-2
0.27641400e-1 -0.96663760e-2 -0.90392230e-1 0.97798170e-1
0.48102840];
G = [G1 fliplr(G1)];
n = 0:15;
H0 = (-1).^n.*G;
Hsqar = zeros(1,31); Gsqar = zeros(1,31);
Hsqar(1:2:31) = H0; Gsqar(1:2:31) = G;
H1 = conv(Hsqar,G); H2 = conv(Gsqar,G);
[h0,w0] = freqz(H0,[1]); [h1,w1] = freqz(H1,[1]); [h2,w2] =
freqz(H2,[1]);
g0 = 20*log10(abs(h0));g1 = 20*log10(abs(h1));
g2 = 20*log10(abs(h2));
plot(w0/pi,g0,'b-',w1/pi,g1,'r-',w2/pi,g2,'g-.');
axis([0 1 -120 20]);
grid on;
xlabel('\omega/\pi');ylabel('Gain, dB');
The plots generated are given below:
20
H0(z)
Gain, dB
0
H1(z)
H2(z)
-20
-40
-60
-80
0
0.2
0.4
0.6
0.8
1
ω/π
M14.5
Not for sale
576