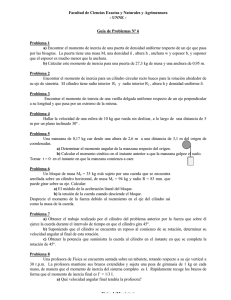
4 Sólido rígido 93 93 94 95 97 99 4.1 Sólido rígido. Rotación alrededor de un eje 4.1.1 Movimiento general de un sólido rígido 4.1.2 Momento angular del sólido rígido. Tensor de inercia 4.1.3 Cálculo de algunos momentos de inercia 4.1.4 Teorema de Steiner o de los ejes paralelos 4.1.5 Movimiento de rotación alrededor de un eje fijo 4.2 Energía cinética de rotación 100 4.3 Ejemplos de movimientos de rotación con un eje fijo 4.3.1 Máquina de Atwood 4.3.2 Movimiento combinado de traslación y rotación 4.3.3 Cuerpo que cae rodando sin deslizar por un plano inclinado 102 102 103 107 4.4 Condiciones de equilibrio. Centro de gravedad y CM 108 4.5 Ejemplos de sólidos rígidos en rotación 4.5.1 Péndulo físico o compuesto 4.5.2 Péndulo de torsión 4.5.3 Peonza simétrica 110 110 111 111 4.6 Problemas de ejemplo 4.6.1 El problema de la bola de billar 4.6.2 Cilindro, bloque y planos inclinados 4.6.3 Cilindro, polea y yoyó 112 112 115 117 91 92 4.1 Sólido rígido. Rotación alrededor de un eje 4.1.1 Movimiento general de un sólido rígido Llamaremos sólido rígido a todo sistema de partículas tal que la distancia entre cualquier par de ellas se mantiene constante. El movimiento más general de un sólido rígido, no sujeto a ligaduras, se puede descomponer en, 1. un movimiento de traslación pura del CM, para el cual las partículas que forman el sólido rígido se trasladan siguiendo trayectorias paralelas a la del CM; 2. un movimiento de rotación pura alrededor del CM, para el cual las partículas describen trayectorias circulares contenidas en planos perpendiculares al eje de rotación y con centro sobre éste. Z' mi Z ri′ ri R CM Y' X' LAB Y X Figura 4.1. Sistemas de referencia laboratorio y centro de masas para un sólido rígido. En general, el movimiento resultante es complejo, pero su estudio se puede simplificar mediante el siguiente teorema: La variación por unidad de tiempo del momento angular de un sólido rígido, calculado respecto al CM, es igual al momento resultante de las fuerzas externas respecto al CM, dL′ ′ , = ∑ ri′× Fi = M ext dt i independientemente de cuál sea el movimiento del CM (CM puede ser un sistema no inercial). Este teorema se puede demostrar fácilmente si tenemos en cuenta que en el capítulo anterior establecimos que: L = R × P + ∑ li′ = R × P + L′ i dL = M ext = ∑ ri × Fi = ∑ R + ri′ × Fi = ∑ R × Fi + ∑ ri′× Fi dt i i i i = R × Fext + ∑ ri′× Fi ( ) i 93 pero además, dP dL′ dL d dL′ = R × P + L′ = V × P + R × + = R × Fext + dt dt dt dt dt Comparando las dos expresiones para dL dt se tiene que: dL′ ′ , = ∑ ri′× Fi = M ext dt i que es justo lo que queríamos demostrar. Para describir la rotación del sólido rígido alrededor del CM necesitaremos calcular el momento angular L′ . El movimiento de traslación del sólido rígido se puede determinar a partir de la 2ª ley de Newton, MA = Fext , aplicada al CM. ( ) 4.1.2 Momento angular del sólido rígido. Tensor de inercia Consideremos un sólido que gira con velocidad angular ω alrededor de un eje que arbitrariamente supondremos que pasa por el origen de coordenadas y vamos a calcular el momento angular total L respecto a dicho punto. El cálculo que vamos a hacer es valido para cualquier sistema de referencia, en particular, para los sistemas laboratorio y centro de masas. Supongamos que el sólido está formado por un conjunto de partículas de masa mi , cada una de ellas con velocidad vi = ω × ri (rotación del sólido alrededor de un eje), el momento angular de cada partícula es: li = ri × pi = ri × ( mi vi ) = mi ri × (ω × ri ) = mi ω ( ri ⋅ ri ) − ri ( ri ⋅ ω ) = mi ri 2ω − ri ( ri ⋅ ω ) donde para desarrollar el triple producto vectorial hemos utilizado la expresión, A× B ×C = B C ⋅ A − C A⋅ B . ( ) ( ) ( ) Sumando para todas las partículas del sólido, N N L = ∑ li = ∑ mi ri 2ω − r ( ri ⋅ ω ) i =1 i =1 De esta ecuación vemos que, en general, L no es paralelo a ω . Vamos a escribir esta relación en componentes, Lx = ∑ mi ri2ωx − xi ( xiωx + yiω y + ziωz ) = ∑ mi ( ri 2 − xi2 ) ωx − xi yiω y − xi ziωz N N i =1 i =1 Ly = ∑ mi ri 2ω y − yi ( xiωx + yiω y + ziωz ) = ∑ mi − yi xiωx + ( ri 2 − yi2 ) ω y − yi ziωz N i =1 N i =1 Lz = ∑ mi ri 2ωz − zi ( xiωx + yiω y + ziωz ) = ∑ mi − zi xiωx − zi yiω y + ( ri 2 − zi2 ) ωz N N i =1 i =1 Estas tres ecuaciones se pueden escribir en forma matricial, m z 2 + yi2 ) − ∑ mi xi yi − ∑ mi xi zi ω Lx ∑ i ( i x L = − m y x 2 2 ∑ i i i ∑ mi ( xi + zi ) −∑ mi yi zi ω y y L 2 2 z − ∑ mi zi xi ωz m z y m x y − + ( ) ∑ ∑ i i i i i i que se puede escribir en forma más compacta como 94 I xy L I x xx L = Ly = I yx I yy L I z zx I zy Los términos diagonales del tensor de inercia I xz ωx I yz ω y = Iɶω . I zz ωz ( I xx , I yy , I zz ) son los momentos de inercia respecto de los ejes de coordenadas. Los términos no diagonales ( I xy , I xz , I yz ) se llaman productos de inercia. Es obvio de las definiciones anteriores que el tensor de inercia es una matriz 3 × 3 simétrica, que siempre se puede diagonalizar (sólo los términos de la diagonal serán diferentes de cero), eligiendo convenientemente los ejes coordenados de manera que coincidan con los ejes principales del sistema (ejes de simetría del sólido). Se puede demostrar que para cualquier sólido existen tres ejes mutuamente perpendiculares respecto a los cuales Iɶ es una matriz diagonal. Es importante resaltar que, aunque el sistema de referencia coincida con los ejes principales y Iɶ sea un tensor diagonal, en general, L y ω no serán vectores paralelos siempre que I xx , I yy , I zz sean diferentes. Sólo cuando el eje de giro coincida con uno de los ejes principales, L será paralelo a ω. Vamos a calcular, ahora, la proyección de L a lo largo de la dirección de ω (componente del momento angular en la dirección del vector velocidad angular). Para ello, simplemente calculamos el siguiente producto escalar: N N 2 Lω = L ⋅ ωˆ = ∑ mi ri 2ω − ri ( ri ⋅ ω ) ⋅ ωˆ = ∑ mi ri2ω − ω ( ri ⋅ ωˆ ) i =1 i =1 N N 2 = ω ∑ mi ri 2 − ( ri ⋅ ωˆ ) = ω ∑ mi ri 2 − ri2 cos2 θi i =1 i =1 = ω ∑ mi ri 2 (1 − cos2 θi ) = ω ∑ mi ri 2 sin 2 θi = ω ∑ mi d i2 = I ω Z N N N i =1 i =1 i =1 donde I = ∑ mi d i2 es el momento de inercia respecto al eje de rotación definido por ω , y d i es la distancia de la partícula i al eje de rotación (ver Figura 4.2). Es fácil comprobar que los elementos de la diagonal del tensor de inercia no son más que los momentos de inercia respecto a los ejes de coordenadas; por ejemplo, ω = ω k̂ di mi θi o ri Y X I xx = ∑ mi ( yi2 + zi2 ) = ∑ mi d i2 . N N i =1 i =1 Figura 4.2. Partícula girando respecto al eje Z . 4.1.3 Cálculo de algunos momentos de inercia Vamos a considerar algunos ejemplos del cálculo del momento de inercia para sólidos homogéneos. 95 1. Momento de inercia de una varilla de longitud l y masa M respecto a un eje perpendicular a la varilla que pasa por uno de sus extremos. ω = ω k̂ M dm = dx l l M I = ∫ x dm = l 0 2 l ∫ x dx = 2 0 1 2 Ml 3 x Figura 4.3. Cálculo del momento de inercia de una barra homogénea 2. Momento de inercia de un cilindro homogéneo de masa M y radio R respecto a su eje de revolución. ω = ω kˆ r h Descomponemos el cilindro en diferenciales de masa, dm , en forma de hojas cilíndricas de radio, r , y grosor, dr , con una masa, M dm = ρ 2π rh dr ; ρ = π R 2h El momento de inercia respecto al eje de rotación será R R 2M I = ∫ r dm = ρ 2π h ∫ r dr = 2 R 0 0 2 3 R r4 4 0 1 MR 2 2 Es importante destacar que I no depende de la altura, h , del cilindro. = Figura 4.4. Momento de inercia de un cilindro homogéneo respecto de su eje de simetría. 3. Momento de inercia de una esfera de radio R y masa M respecto un eje que pasa por el centro de la esfera. La densidad de la esfera es: M ρ= . ω = ω k̂ ( 4 3) π R 3 Para realizar el cálculo descomponemos la esfera en láminas cilíndricas delgadas de grosor, dz , perpendiculares al eje de r rotación y aplicamos el resultado anterior z para el momento de inercia de un cilindro, R dm = ρπ r 2 dz = ρπ ( R 2 − z 2 ) dz , 2 1 1 dI = r 2dm = ρπ ( R 2 − z 2 ) dz 2 2 por lo tanto, Figura 4.5. Momento de inercia de una esfera. 96 R R 1 2 I = ∫ dI = ρπ ∫ ( R 4 − 2 R 2 z 2 + z 4 ) dz = MR 2 2 5 −R −R 4.1.4 Teorema de Steiner o de los ejes paralelos El teorema de Steiner relaciona el momento de inercia I respecto de un eje cualquiera con el momento de inercia I ′ respecto de un eje paralelo al anterior que pasa Z Z' mi ri′ ri d CM YY' X X' Figura 4.6. Ejes paralelos respecto a los cuales los momentos de inercia correspondientes se relacionan a través del teorema de Steiner. por el CM. Sea I el momento de inercia respecto al eje Z de la Figura 4.6 y sea I ′ el momento de inercia respecto a un eje paralelo Z′ que pasa por el CM. Vamos a considerar los sistemas coordenados asociados a estos dos ejes, tal como se muestra en la Figura 4.6, I = ∑ mi ( xi2 + yi2 ) , pero ri = d + ri′ → xi = xi′ yi = d + yi′ , con lo que, I = ∑ mi xi′2 + ( yi′2 + d ) = ∑ mi d 2 + 2d ∑ mi yi′ + ∑ mi ( xi′2 + yi′2 ) = Md 2 + I ′ ya que ∑ m y′ es la coordenada i i y′ del CM multiplicada por M , respecto al sistema de referencia CM, que evidentemente es cero. ∑ m ( x′ 2 i i + yi′2 ) es el momento de inercia respecto al eje Z′ que pasa por el CM. Ejemplos: 1. Momento de inercia de un cilindro de masa M y radio R respecto a un eje paralelo al de simetría y que pasa por la superficie. R I = I ′ + MR 2 = 3 MR 2 2 97 2. Momento de inercia de una esfera respecto a un eje que pasa tangente a la superficie. I = Md 2 + I ′ = MR 2 + R 2 7 MR 2 = MR 2 5 5 Observaciones: 1. Si un cuerpo de masa M gira alrededor de un eje fijo o de un eje principal, el radio de giro, d G , es la distancia al eje a la que hemos de situar una partícula de masa M para que tenga el mismo momento de inercia del cuerpo, 1 ∑ mi di2 M Por ejemplo, en el caso de la esfera que gira respecto a un eje que es tangente a la superficie, 7 dG = R = 1.18R 5 2. Si se quiere calcular el momento de inercia de un cierto conjunto de cuerpos, se puede aplicar el teorema de Steiner a cada uno de ellos y luego sumar para obtener el momento de inercia total. Los huecos deben tratarse como objetos de masa negativa. Por ejemplo, si queremos calcular el momento de inercia del sistema de la figura, Md G2 = I = ∑ mi d i2 → dG = R l, m l, m R 2 M Aplicando el teorema de Steiner a los diferentes elementos que forman el sistema y tratando la cavidad como una esfera de masa negativa se obtiene: 2 2 2 2 2 M R2 M 2 2 2 2 2 I = ml + MR + M ( R + l ) + MR + M ( R + l ) − − (R + l) 3 5 5 5 8 4 8 2 31 15 2 = ml 2 + MR 2 + M ( R + l ) 3 40 8 98 4.1.5 Movimiento de rotación alrededor de un eje fijo La ecuación que determina el movimiento de rotación de un sólido es dL = ∑ ri × Fi ext = M ext dt donde el momento angular, L , y el momento de la resultante de las fuerzas externas están referidos al origen de un sistema de referencia inercial o del CM. En general, el momento angular del sólido se puede calcular a partir del tensor de inercia y el vector velocidad angular, Lx I xx I xy I xz ωx L = I I I y yx yy yz ωy L I z zx I zy I zz ωz Esta ecuación adopta una forma bastante más simple cuando los ejes de coordenadas coinciden con ejes principales del sólido y el tensor de inercia adopta una forma diagonal, L = I ω iˆ + I ω ˆj + I ω kˆ xx x yy y zz z Un caso simple muy importante es aquél en el que el eje de rotación (determinado por ω ) tiene una dirección fija, lo cual se puede conseguir mediante la acción de fuerzas de ligadura que mantengan la orientación del eje de rotación; o haciendo coincidir el eje de rotación con uno de los ejes principales. En el primer caso, en general, L y ω no serán vectores paralelos, y el vector L realizará un movimiento de precesión alrededor del eje de rotación determinado por ω . En el segundo caso, el momento angular y la velocidad angular serán siempre vectores paralelos. Para estos dos casos que dan lugar a un eje de rotación fijo, podemos suponer que ˆ ω k → Lz = I ω , donde I es el momento de inercia respecto al eje de giro. La ecuación del movimiento para la rotación alrededor del eje z es: dLz = M zext , dt donde Lz y M zext son las componentes del momento angular y de la resultante del momento de las fuerzas externas en la dirección del eje de giro (que coincide con la dirección de ω y del eje z ). Teniendo en cuenta que I es un escalar que no depende del tiempo, ya que estamos estudiando la rotación de un sólido rígido, dLz d dω = ( Iω ) = I = Iα = M zext , dt dt dt donde α es la aceleración angular. Obviamente α es un vector paralelo a ω . Esta ecuación para las rotaciones alrededor de un eje fijo es semejante a la segunda ley de Newton para un movimiento unidimensional. Observaciones: 1. Cuanto mayor sea M zext mayor será la aceleración angular, α . Es decir, M zext es la única acción externa responsable de que el cuerpo acelere en su rotación en torno a un eje fijo paralelo a k̂ . Las otras componentes que pudieran existir del momento de las fuerzas externas deben compensarse con los momentos 99 2. 3. 4. 5. realizados por las fuerzas de ligadura que realizan los soportes del eje, ya que, en otro caso, tenderían a hacer variar la dirección del eje de giro. Si el momento de las fuerzas externas en la dirección del eje de giro es nulo, la proyección Lω es una constante del movimiento y, en consecuencia, la velocidad angular también lo es. En este caso, es obvio que α = 0 . El momento de inercia es una medida de la “dificultad” existente para cambiar la velocidad angular de un sólido. En realidad, es una propiedad inercial para las rotaciones semejante a la masa para las traslaciones. Cuando la dirección del eje de rotación cambia con el tiempo y sólo hay una fuerza externa, el vector diferencial del momento angular dL = Mdt es perpendicular a la fuerza. Para calcular M z (componente del momento resultante de las fuerzas externas a lo largo del eje de giro) basta considerar las componentes de Fi perpendiculares al eje de rotación. En efecto, M z = ωˆ ⋅ ∑ ri × Fi = ωˆ ⋅ ∑ ri × Fi + Fi ⊥ = ∑ d i Fi ⊥ , i i i donde d i es la distancia mínima entre el punto de aplicación de Fi y el eje de rotación. La componente Fi da una contribución perpendicular a ω y, por lo ( ) tanto, no contribuye a M z . 4.2 Energía cinética de rotación Vamos a considerar un sólido que gira alrededor de un eje. La velocidad de una porción i del sólido es vi = ω × ri . Por lo tanto, su energía cinética es 2 1 1 Ti = mi vi2 = mi (ω × ri ) 2 2 2 2 1 2 = mi (ω y zi − ωz yi ) + (ωx zi − ωz xi ) + (ωx yi − ω y xi ) 2 1 = mi ωx2 ( yi2 + zi2 ) + ω y2 ( xi2 + zi2 ) + ωz2 ( xi2 + yi2 ) − 2ωxω y xi yi − 2ωxωz xi zi − 2ω yωz yi zi 2 Sumando las contribuciones de todas las porciones del sólido, 1 T = ∑ T i = ωx2 I xx + ω y2 I yy + ωz2 I zz − 2ωxω y I xy − 2ωxωz I xz − 2ω yωz I yz 2 1 1 1 = ω ⋅ ( Iɶω ) = ω ⋅ L = ω Lω 2 2 2 Esta ecuación adopta una forma mucho más sencilla cuando los ejes de coordenadas coinciden con los ejes principales del sólido. En ese caso, 1 T = ( I xxωx2 + I yyω y2 + I zzωz2 ) 2 Si la rotación se da alredor de un eje fijo, 1 1 T = ( ∑ mi d i2 ) ω 2 = I ω 2 2 2 Esta expresión tiene muchas similitudes con la energía cinética para un movimiento unidimensional, T = 1 2 Mv 2 . Además, dado que Lω = I ω , 100 L2 2I Vamos a obtener, ahora, una versión del teorema trabajo-energía para las rotaciones del sólido rígido alrededor de un eje. El trabajo realizado por las fuerzas externas durante un intervalo de tiempo dt es dW = ∑ ( vi dt ) ⋅ Fi ext = dt ∑ (ω × ri ) ⋅ Fi ext = dt ∑ ω ⋅ ri × Fi ext , T= ( ) donde hemos utilizado el hecho de que el producto mixto es invariante a permutaciones cíclicas de los productos escalar y vectorial. En consecuencia, dW = dt ∑ ω ⋅ ri × Fi ext = dt ω ⋅ M ext ( ) Es importante resaltar que este resultadotiene validez general. Para el caso particular de una rotación alrededor de un eje fijo, M ext ω y, por lo tanto, la expresión anterior se transforma en una simple ecuación escalar, dW = dt ω M ext = dϕ M ext , donde se ha utilizado que dϕ = ω dt es el ángulo girado durante un intervalo de tiempo dt . Por otro lado, M ext = dL dt , y, en consecuencia, 1 dW = ω dtM ext = ω dL = ω d ( I ω ) = I ω d ω = d I ω 2 = dT 2 que no es más que el teorema trabajo-energía para rotaciones. A partir de estos resultados se puede calcular la potencia desarrollada por las fuerzas externas, dW Pext = = ω ⋅ M ext , dt que es una ecuación análoga a la que se obtuvo para las traslaciones, P = F ⋅ v . Si la rotación tiene lugar alrededor de un eje fijo, Pext = ω M ext Observaciones: 1. Para rotaciones alrededor de un eje fijo, el caso más general que podemos estudiar es el correspondiente a un movimiento combinado de traslación del CM y rotación respecto a un eje principal que pase por el CM. La energía cinética total tendrá dos contribuciones, 1 1 T = MV 2 + I ω 2 2 2 Si las fuerzas externas son conservativas, la energía mecánica total será una constante del movimiento, 1 1 E = MV 2 + I ω 2 + U ext 2 2 2. Analogía entre las ecuaciones para las traslaciones y las rotaciones. dx dp 1 d 2x p = mv v = F = T = mv 2 x m a= 2 P = v⋅F ext dt dt 2 dt 2 1 dL ϕ ω = dϕ α = d ϕ P = ω ⋅ M ext T = I ω 2 M ext = I L = Iɶω 2 dt 2 dt dt 101 4.3 Ejemplos de movimientos de rotación con un eje fijo 4.3.1 Máquina de Atwood R Una máquina de Atwood está constituida por dos cuerpos que cuelgan de una polea y están unidos por una cuerda de masa despreciable. La polea rueda sin fricción con el eje y la cuerda no resbala sobre la superficie de la polea. Se trata de calcular la aceleración, a , de las dos masas. Si la cuerda no desliza sobre la polea, la aceleración angular de las dos masa y la aceleración angular de la polea están relacionadas a través de α = a R . Vamos a resolver el problema utilizando tres métodos alternativos. T1 T2 T2 T1 m2 g m1 g Figura 4.7. Máquina de Atwood. 1. Segunda ley de Newton. m1 g − T1 = m1a masas: T2 − m2 g = m2 a 1 1 a MR 2 → T1 − T2 = Ma 2 R 2 donde M es la masa de la polea. Sumando las tres ecuaciones, 1 m1 − m2 g ( m1 − m2 ) g = m1 + m2 + M a → a = 1 2 m1 + m2 + M 2 2. Momento angular. El momento angular del sistema respecto al centro de la polea es un vector perpendicular al plano de la polea que va dirigido según el eje de giro de la polea hacia adentro del papel. Su módulo es L = m1vR + m2 vR + I ω = v ( m1R + m2 R + I R ) Además, el momento de las fuerzas externas (pesos de las dos masas) respecto al centro de la polea vale M ext = m1gR − m2 gR , entonces, dL = M ext → a ( m1 R + m2 R + MR 2 ) = g ( m1 − m2 ) R , dt de donde, m1 − m2 a= g m1 + m2 + M 2 polea: (T1 − T2 ) R = Iα = 102 3. Conservación de la energía. La aceleración también puede obtenerse a través del principio de conservación de la energía. Suponiendo que en el instante inicial v = 0 , h = 0 , por lo tanto, E = 0 , 1 1 1 0 = − m1 gh + m1v12 + m2 gh + m2v22 + I ω 2 , 2 2 2 R donde hemos utilizado que: 1 v I = MR 2 ; ω = ; v1 = v2 = v , 2 R para obtener, m2 1 1 0 = − ( m1 − m2 ) gh + m1 + m2 + M v 2 , 2 2 h 2 de donde podemos despejar v , m1 − m2 v2 = 2 gh = 2ah −h 1 m1 + m2 + M 2 m1 Por lo tanto, el movimiento es uniformemente acelerado con aceleración, Figura 4.8. Origen para m1 − m2 la energía potencial a= g m1 + m2 + M 2 gravitatoria 4.3.2 Movimiento combinado de traslación y rotación - Cilindro que se desplaza sobre un plano horizontal ω Consideremos, primero, un cilindro que rueda sin deslizar por un plano horizontal. Vamos a calcular la velocidad lineal, debida a la rotación alrededor del CM, de los puntos de la periferia del cilindro. En un ∆ t , cualquier punto CM R de la periferia se desplaza una distancia ∆ s = R θ en torno al CM y, por lo tanto, su velocidad lineal θ de rotación es: ∆s θ −v v= =R = Rω ∆ s = Rθ ∆t ∆t y es constante, ya que el cilindro gira a velocidad angular constante respecto a su CM. Durante el intervalo ∆ t , el CM también se desplaza ∆ s si el cilindro rueda sin deslizar. Por lo tanto, la velocidad de traslación del CM, debida a la rotación alrededor del CM, es: vCM = ∆ s ∆ t = R ω , que coincide con la velocidad lineal en módulo de los puntos de la periferia. El movimiento total de un punto de la periferia del cilindro resulta de la composición de un movimiento de traslación con velocidad v = ( v,0) y un movimiento de rotación alrededor del CM con velocidad de módulo v , tal como se indica en la figura. 103 A + = B D C Traslación rotación en torno al CM velocidad resultante Haciendo la composición de los movimientos de rotación alrededor del CM y traslación del CM se obtiene, v A = ( v, 0 ) + ( v,0 ) = ( 2v,0 ) vB = ( v, 0 ) + ( 0, −v ) = ( v, − v ) vC = ( v,0 ) + ( −v, 0 ) = ( 0,0 ) vD = ( v,0 ) + ( 0, v ) = ( v, v ) El eje C de contacto entre el cilindro y el plano tiene una velocidad resultante nula. Por lo tanto, se puede suponer que el movimiento del cilindro es una rotación pura alrededor de este eje que llamaremos eje instantáneo de rotación. A B D C Vamos a calcular la ecuación de los puntos del cilindro que tienen la misma velocidad en módulo que el CM. Teniendo en cuenta que por C pasa el eje instantáneo de rotación, estos puntos son los que quedan sobre la circunferencia centrada en C y de radio R igual al del cilindro (circunferencia de menor radio en la figura anterior). Para obtener la ecuación de estos puntos vamos a considerar el vector velocidad resultante para un punto ( x, y ) arbitrario del cilindro. y r θ x 104 En la figura se representa la componente de la velocidad del punto ( x, y ) debida sólo a la rotación alrededor del CM . La velocidad resultante será: v v v v v ( x, y ) = ( v,0 ) + r sin θ , − r cos θ = ( v, 0 ) + y , − x R R R R y x = v 1 + , − v R R Si ahora imponemos que v ( x, y ) = v , tendremos que 2 y x2 2 y y 2 x2 v 1 + + v 2 2 = v 2 → 1 + + + =1 R R R2 R2 R 2 R 2 = 2 yR + R 2 + y 2 + x 2 → ( y + R ) + x 2 = R 2 2 Ésta es la ecuación de una circunferencia de radio R , centrada en ( 0, − R ) , que es la posición del eje instantáneo de rotación. Todos estos resultados se pueden resumir de la siguiente forma. Si el cuerpo desliza sobre la superficie sin rodar, todas las partículas tienen la misma velocidad, v , y el cilindro realiza un movimiento de traslación puro (ver Figura 4.9(a)). Si el cuerpo rueda sin deslizar, el eje en contacto con el plano tiene velocidad nula (eje instantáneo de rotación), el CM tienen velocidad v y el punto más alto se mueve con velocidad 2v (ver Figura 4.9(b)). En este caso, el movimiento es una rotación pura alrededor del centro instantáneo de rotación con velocidad angular, ω = v R . Una forma alternativa de estudiar este último caso consiste en descomponer el movimiento en una traslación del CM con velocidad v y una rotación alrededor del CM con velocidad angular ω = v R (ver Figura 4.9(c)). En los dos casos, la cantidad de movimiento total viene dada por P = Mv (es la asociada al CM ), mientras que la energía cinética total es diferente, v R ω 2v v −v ω v v (a) (b) (c) Figura 4.9. a) Cilindro que desliza sin rodar; b) Cilindro que rueda sin deslizar visto como una rotación pura alrededor del centro instantáneo de rotación; c) Traslación del CM más rotación alrededor del CM para un cilindro que rueda sin deslizar. 1 Mv 2 2 2 1 2 13 3 2 v Tb = I ω = MR 2 = Mv 2 2 22 4 R → Tb = Tc 2 1 1 1 11 3 v Tc = Mv 2 + I ′ω 2 = Mv 2 + MR 2 2 = Mv 2 2 2 2 22 4 R Ta = 105 Nótese que Tb > Ta , ya que, en este caso, además de la energía cinética de traslación existe energía cinética de rotación; sin embargo, la velocidad del CM es la misma en ambos casos. - Barra y disco moviéndose sobre una superficie horizontal M L CM d v Una barra de longitud L y masa M descansa sobre una mesa horizontal lisa. La barra se puede mover de cualquier forma sobre la mesa. Un disco de masa m se acerca deslizando sobre la mesa con velocidad v , como se indica en la figura, y choca elásticamente contra la barra. a) ¿Qué magnitudes se conservan en el choque? b) ¿Cuál ha de ser la masa del disco para que quede en reposo después del choque? a) Dado que no actúan fuerzas externas, se conserva la cantidad de movimiento total del sistema formado por la barra y el disco. Como no actúan fuerzas externas, tampoco habrá momento realizado por las fuerzas externas y, por lo tanto, también se conservará el momento angular total. Por último, como el choque entre el disco y la barra es elástico, se conservará la energía cinética total. b) Vamos a imponer la conservación de estas magnitudes, suponiendo que el disco se queda en reposo después de la colisión. i) ii) Cantidad de movimiento: Inicial: mv m v → vb = Final: Mvb M Momento angular: Inicial: mv d mv d →ω = Final: I CM ω I CM iii) Energía cinética: 1 2 1 1 mv = I CM ω 2 + mvb2 2 2 2 2 mvd 1 m 1 1 ⇒ mv 2 = I CM + M 2 2 I CM 2 M Cálculo de I CM 2 m 2d 2 m 2 v → m = + I CM M respecto a un eje perpendicular a la barra: 3 1 M L 1 M 2 = ∫ r dm = ∫ r dr = 2 = ML 3 L 2 12 L −L 2 L2 I CM 2 2 106 Por lo tanto, m= d2 12d 2 1 m2d 2 m2 1 + →1 = m + = m + 2 I CM M M ML I CM M m = 1 12d 2 1 + ML2 M = ML2 12d 2 + L2 4.3.3 Cuerpo que cae rodando sin deslizar por un plano inclinado Supongamos un cilindro de masa m y radio R que cae por un plano inclinado rodando sin deslizar, debido a la acción de la fuerza de rozamiento, f r . En realidad, la fuerza de rozamiento no realiza trabajo disipativo si el cuerpo no desliza, pero es necesaria para producir la rotación. Si f r no pudiera adoptar un valor “suficiente”, el cilindro bajaría por el plano inclinado siguiendo un movimiento combinado de rotación y deslizamiento. En el caso de que ruede sin deslizar, la velocidad y la aceleración del CM pueden calcularse a partir de las ecuaciones, v ≡ velocidad del CM v dω a = ; α= ω= R dt R a ≡ aceleración del CM El problema se puede resolver de tres formas alternativas. fr R mg sin θ mg cos θ mg θ Figura 4.10. Esquema de fuerzas para un cilindro que rueda sin deslizar por un plano inclinado. 1) Eje instantáneo de rotación. Si adoptamos como origen de coordenadas el centro instantáneo de rotación, el momento de las fuerzas externas es: CIR M ext = mgR sin θ , de forma que se puede escribir la igualdad, dL d ( I ω ) 3 a 2 = = Iα = mR 2 = mgR sin θ → a = g sin θ dt dt 2 R 3 Esta aceleración es menor que la que adquiriría si bajara deslizando, ad = g sin θ . 2) Centro de masas. Si elegimos el origen de coordenadas coincidiendo con el CM, el movimiento es el resultado de la composición de la traslación del CM más la rotación alrededor del CM. Las ecuaciones que determinan esas dos contribuciones son las siguientes: 107 ma = mg sin θ − f r f r R = I ′α = a 1 mR 2 R 2 1 2 → ma = mg sin θ − ma → a = g sin θ 2 3 → fr = 1 ma → 2 1 f r = mg sin θ 3 Este valor de f r es el mínimo necesario para que el cilindro ruede sin deslizar. Es importante tener en cuenta que, como no hay desplazamiento relativo entre el plano inclinado y el punto de contacto del cilindro, el rozamiento que actúa es el estático. Para que ruede sin deslizar se debe cumplir la siguiente condición 1 f r ≤ µe N → mg sin θ ≤ µe mg cos θ → tan θ ≤ 3µe (cilíndro) 3 3) Resolución mediante la conservación de la energía. Teniendo en cuenta que f r no realiza trabajo disipativo, todas las fuerzas externas que actúan sobre el cilindro son conservativas y, en consecuencia, la energía mecánica es una constante del movimiento. Si el cuerpo parte del reposo y recorre un cierto espacio l durante el tiempo t , desciende una altura h = l sin θ , por lo tanto, tendremos que, 1 1 1 1 v2 3 2 mgl sin θ = mv 2 + I ω 2 = mv 2 + mR 2 2 = mv 2 → v 2 = 2 g sin θ l 2 2 2 4 R 4 3 2 → a = g sin θ 3 Si en lugar de un cilindro tuviéramos una esfera, la aceleración sería aesfera = 5 7 g sin θ , ya que I esfera < I cilindro . 4.4 Condiciones de equilibrio. Centro de gravedad y CM Un cuerpo rígido está en equilibrio mecánico si al ser analizado desde un sistema de referencia inercial se cumple que: i) la aceleración lineal de su CM es nula; y ii) la aceleración angular α es también nula. Esta definición de equilibrio no implica necesariamente que el cuerpo esté en reposo respecto al observador, sino únicamente que no esté acelerado. Es decir, el cuerpo se puede mover con velocidad lineal constante o puede girar alrededor de un eje con velocidad angular constante. Si el cuerpo está realmente en reposo, se habla de equilibrio estático (velocidades lineal y angular nulas). Sin embargo, las condiciones para que se dé el equilibrio son las mismas en ambos casos, Fext i) A = =0 m M ext ii) α = =0 I Es decir, la resultante de las fuerzas externas y el momento resultante de las fuerzas externas deben ser ambos nulos. Estas dos ecuaciones vectoriales nos dan seis ecuaciones escalares para establecer las condiciones de equilibrio, una para cada grado de libertad del sólido (tres de traslación y tres de rotación). Sin embargo, falta indicar respecto a que punto debe calcularse M ext . En caso de equilibrio, el punto de referencia para calcular los momentos puede elegirse arbitrariamente. En efecto, si Fext = 0 , vamos 108 a calcular el momento de las fuerzas externas para dos puntos arbitrarios o y o′ que están conectados por el vector d , o o′ M ext = ∑ ri × Fi = ∑ d + ri′ × Fi = d × Fext + ∑ ri′× Fi = M ext , i i i ya que la resultante de las fuerzas externas es igual a cero, Fext = 0 , en condiciones de equilibrio. Consideremos un sólido rígido en un campo gravitatorio uniforme. El peso total del sólido valdrá: P = ∑ mi g = Mg , siendo éste resultado de la composición de los pesos de las partículas que forman el sólido. Supongamos que se aplica una fuerza − P en el CM del cuerpo. En ese caso, observamos que el cuerpo se encuentra en equilibrio ya que, ∑ mi g − P = 0 y eligiendo como origen de referencia de los momentos de las fuerzas externas el CM, ′ = ∑ ri′× ( mi g ) + 0 × − P = ∑ ( mi ri′) × g = 0 , M ext ya que ∑ mi ri′ es proporcional a las coordenadas del CM respecto al CM. En consecuencia, la fuerza gravitatoria que actúa sobre un cuerpo rígido en un campo uniforme, g , es equivalente a una única fuerza, Mg , aplicada en el CM. Es por esta razón que el CM se llama también centro de gravedad. Acabamos de demostrar que un sistema de fuerzas paralelas es equivalente a una única fuerza aplicada en un punto determinado del sólido rígido. Sin embargo, en general, un sistema de fuerzas arbitrario no es equivalente a la acción de una única fuerza, ya que una sola fuerza no puede producir rotaciones alrededor de su recta de acción. Vamos a ver que todo sistema de fuerzas que actúan sobre un sólido rígido es equivalente a la fuerza resultante, Fext , aplicada en el CM más un par de fuerzas que ′ de las fuerzas produzca un momento neto respecto al CM igual al momento M ext externas respecto al CM. De esta forma produciremos sobre el sólido rígido el mismo movimiento que el sistema de fuerzas. Un par de fuerzas es una pareja de dos fuerzas de igual F módulo y sentidos opuestos que tienen rectas de acción r1 − r2 Z diferentes. Aunque la fuerza resultante de un par es siempre cero, la acción combinada de r1 las dos fuerzas tiende a producir una rotación. El momento neto −F r2 del par de fuerzas es: M par = r1 × F − r2 × F o Y = ( r1 − r2 ) × F X Es importante hacer notar que Figura 4.11. Acción de un par de fuerzas sobre un M par es perpendicular al plano sólido rígido determinado por las fuerzas que forman el par y no depende del punto o de referencia, ya que la fuerza resultante del par es cero. ( ) ( ) 109 Ejemplo: Hallar la fuerza F ejercida por la articulación sobre la viga. Para que la viga se encuentre en equilibrio estático es necesario que se anulen simultáneamente la suma de fuerzas y momentos que actúan sobre ella. T1 = mg T ∑ F = 0 → T − F cos β = 0 F sin β − mg − Mg = 0 β T1 l ∑ M = 0 ( respecto a la articulación ) F Mg −T1 mg l Tl sin β − mgl cos β − Mg cos β = 0 2 A partir de las tres ecuaciones anteriores se pueden obtener las componentes de la fuerza F que la articulación ejerce sobre la viga, 1 1 T = mg + Mg = Fx ; Fy = mg + Mg 2 tan β 4.5 Ejemplos de sólidos rígidos en rotación 4.5.1 Péndulo físico o compuesto Un péndulo físico es un cuerpo de masa M y momento de inercia I respecto a un eje fijo o , alrededor del cual puede girar libremente bajo la acción de su peso. Si desplazamos el cuerpo de su posición de equilibrio, de forma que el CM se aparte de la vertical un cierto ángulo θ m y dejamos el cuerpo libre, el movimiento posterior será oscilatorio entre θ m y −θ m . La ecuación del movimiento es: dL d ( I ω ) d 2θ = = Iα = M ext → I 2 = − Mgd sin θ dt dt dt Para pequeñas oscilaciones, sin θ ≃ θ , entonces, Iα = − ( Mgd ) θ = − kθ , por lo tanto, el péndulo seguirá un movimiento armónico simple de periodo, T = 2π θ d CM Mg Figura 4.12. Péndulo físico. I Mgd El péndulo físico se utiliza para hacer determinaciones precisas de g , si se conoce el momento de inercia del cuerpo, o para medir el momento de inercia del cuerpo a partir de la determinación experimental del periodo de oscilación. Si aplicamos estos resultados al caso de una barra de masa M y longitud l que oscila alrededor de uno de sus extremos, y tenemos en cuenta que I = 1 3 Ml 2 , el periodo de las oscilaciones es: I 2l T = 2π = 2π Mg l 2 3g 110 y el radio de oscilación, 2 I 2l = , Ml 3 que corresponde a la longitud que debería tener un péndulo simple con la masa M y que tuviera el mismo periodo. Si se aplica una fuerza impulsora, F , en un punto de la barra que está a una cierta distancia d del Fe eje de giro, éste ejerce una fuerza Fe de signo contrario sobre la barra, de tal forma que dP d ( M ω l 2 ) Ml d = = F − Fe → ω = ∫ ( F − Fe ) dt dt dt 2 dL d ( I ω ) CM = = Fd → I ω = d ∫ Fdt dt dt do = F Vamos a ver en qué punto d se ha de aplicar F , para que el impulso de la fuerza de reacción que hace el eje sobre la barra se anule, Ml I Ml 2 I 2l ∫ Fedt = ∫ Fdt − 2 ω = d ω − 2 ω = 0 → d = Ml = 3 = do Es decir, el eje no ejerce ningún impulso sobre la barra cuando se aplica la fuerza F en un punto que está a una distancia d o del eje de rotación. A este punto se le llama centro de percusión. Por ejemplo, los jugadores de béisbol conocen perfectamente donde se encuentra el centro de percusión en el bate y así minimizan el esfuerzo que deben hacer con la muñeca en el momento del impacto con la bola. 4.5.2 Péndulo de torsión Cuando un cuerpo elástico se somete a una torsión, el ángulo de deformación es proporcional al momento de la fuerza aplicada sobre el cuerpo (ley de Hooke), de tal manera que, M = − kθ , y por lo tanto, d 2θ Iα = I 2 = − kθ , dt donde k es la constante recuperadora. Los muelles metálicos de torsión (por ejemplo, los de los relojes mecánicos) satisfacen con mucha aproximación la ley de Hooke. La solución de la ecuación diferencial anterior es: θ ( t ) = θ m sin (ω t + ϕ 0 ) , donde ω = k I , y por lo tanto, el movimiento es armónico simple. El periodo de este movimiento oscilatorio es: T = 2π I k 4.5.3 Peonza simétrica Una peonza es un cuerpo que gira apoyándose en una región muy estrecha que podemos considerar puntual. Vamos a considerar una peonza que gira respecto a su eje de simetría, que es un eje principal, 111 L = Iω Si la peonza gira inclinada, el peso resultante, mg , que podemos considerar como aplicado en el CM, realiza un momento que respecto al origen (que supondremos en el Z L ω L sin θ dL ϕ CM θ Ω d mg o Y X Figura 4.13. Movimiento de precesión de una peonza simétrica. punto de contacto entra la peonza y la mesa, ya que este es un punto fijo) es: M = mgd sin θ En el intervalo de tiempo dt , el momento angular varía en dL = Mdt , en la dirección que se muestra en la Figura 4.13. En consecuencia, el momento del peso da lugar a que L y la peonza, en conjunto, giren alrededor del eje Z con velocidad angular, dϕ dL 1 M mgd Ω= = = = dt L sin θ dt L sin θ L A este movimiento de giro alrededor del eje Z se le llama movimiento de precesión. En realidad, el cálculo que hemos hecho es sólo aproximado, ya que al existir un movimiento de precesión con velocidad angular Ω , L es sólo aproximadamente igual a I ω cuando ω ≫ Ω . En el movimiento real, el ángulo θ también varía siguiendo un movimiento de nutación. Es importante resaltar que Ω no depende del ángulo de precesión θ , tal como demuestra la ecuación anterior. Sin embargo, la velocidad angular de precesión, Ω , es inversamente proporcional a la velocidad angular ω ( L ≈ I ω ), y esto hace que Ω aumente rápidamente a medida que la peonza se va parando en su rotación sobre sí misma. 4.6 Problemas de ejemplo 4.6.1 El problema de la bola de billar Consideremos una bola de billar de masa m y radio R . Preparamos unas condiciones iniciales v0 y ω0 para el movimiento de la bola (por ejemplo, dándole con el palo), donde v0 es la velocidad inicial de traslación de la bola y ω0 la velocidad angular inicial de rotación respecto a su CM , y estudiamos el movimiento posterior de la bola, suponiendo que se mueve por una superficie con coeficiente de rozamiento cinético µ . 112 1) v0 > 0, ω0 > 0, ω0 R > v0 ⇒ la bola desliza ya que gira demasiado rápido para la velocidad a la que se está trasladando. ω0 N v0 ω0 R mg v0 f r = µ N = µ mg El punto de contacto entre la bola y la superficie se desplaza respecto a ésta hacia atrás, ya que ω0 R > v0 . En consecuencia, la fuerza de rozamiento trata de evitar este desplazamiento relativo y actúa dirigida hacia delante, tal como se indica en el dibujo. El momento que realiza f r respecto al CM de la bola “frena” la rotación de ésta, disminuyendo ω . Vamos a escribir las ecuaciones del movimiento. - Rotación respecto al CM: 5 µg 2 − µ mgR = mR 2 α → α = − 2 R 5 5 µg ω ( t ) = ω0 − α t = ω0 − t 2 R - Traslación del CM: f r = µ N = ma N − mg = 0 → µg = a v ( t ) = v0 + at = v0 + µ gt Por lo tanto, la velocidad angular de rotación disminuye linealmente con el tiempo, mientras que la velocidad de traslación aumenta linealmente con t . Cuando se alcanza la condición ω ( t ′) R = v ( t ′) , la fuerza de rozamiento pasa a ser estática y adopta el valor cero. A t′ se alcanza la condición de rodadura y la bola rueda sin deslizar a velocidad de traslación constante. ω0 R ωR fr = 0 v0 v t′ t 2) v0 > 0, ω0 > 0, ω0 R < v0 ⇒ la bola desliza porque se traslada demasiado rápido para que se verifique la condición de rodadura. En este caso, el rozamiento estático actúa hacia atrás, tratando de frenar el avance de la bola. 113 ω0 N v0 ω0 R v0 fr = µN mg El momento que realiza f r respecto al CM tiende a aumentar ω y, a la vez, produce una deceleración en la traslación de la bola que tiende a disminuir v . Las ecuaciones del movimiento serán: 5 µg ω ( t ) = ω0 + t 2 R v ( t ) = v0 − µ gt v0 v ω0 R fr = 0 ωR = v ωR t′ t 3) v0 > 0, ω0 < 0, − ω0 R > v0 ⇒ la rotación y la traslación dan lugar a que el punto de contacto de la bola con la superficie tenga una velocidad lineal positiva respecto a la superficie. La fuerza de rozamiento actuará hacia atrás, tendiendo a disminuir, a la vez, la velocidad de traslación y el módulo de la velocidad angular de rotación. ω0 N v0 ω0 R v0 fr = µ N mg Cuando se alcance la condición de rodadura ( ω R = v ) se podrán dar dos casos diferentes, que dependerán de los valores concretos de los parámetros del problema. ω0 v0 v0 ω0 v v0 ωR = v t′ t ωR ω0 R 114 En el primer caso, se invierte el sentido de rotación de la bola antes de alcanzar la condición de rodadura, tal como se indica en la figura. ω0 v0 v0 ω0 v0 v t′ ωR = v ωR t ω0 R En el segundo caso, se produce un “efecto de retroceso” en la bola y antes de que se alcance la condición de rodadura se invierte el sentido de avance del CM de la bola, tal como se puede ver en la figura. 4) v0 > 0, ω0 < 0, − ω0 R < v0 ⇒ es análogo al caso anterior. 4.6.2 Cilindro, bloque y planos inclinados m1 = m2 2 m2 µc = 0.5 h = 3R µe = µ c = 0 α = 30º Un cilindro de masa m2 y radio R rueda sin deslizar por un plano inclinado con α = 30º , arrastrando, mediante una cuerda sin masa (inextensible) unida a su eje de giro, un bloque de masa m1 = m2 2 que se mueve por un plano horizontal con coeficiente de rozamiento cinético µc = 0.5 (ver la figura adjunta). Si suponemos que la polea tiene una masa despreciable, a) calcular la aceleración a la que se traslada el conjunto. b) Cuando se inicia el movimiento el CM del cilindro se encuentra a una altura igual a 3R respecto al punto más bajo del plano inclinado. Encontrar la velocidad de traslación del CM del cilindro cuando éste llega a la base del plano inclinado. c) En este punto, se rompe la cuerda que une el cilindro con el bloque y el cilindro comienza a subir por la ladera opuesta del plano inclinado, que no tiene rozamiento. ¿A qué altura llegará el cilindro antes de pararse? a) Aceleración a la que se traslada el conjunto. Consideraremos por separado el movimiento de los dos cuerpos. 115 - Para el bloque aplicaremos la segunda ley de Newton al movimiento de su centro de masas: m f rc = µc m1 g = µc 2 g + 2 N m m T T − f rc = T − µc 2 g = m1a1 = 2 a1 2 2 f rc m1 = m2 2 m m m T = µc 2 g + 2 a1 = 2 ( µc g + a1 ) 2 2 2 m1 g El cilindro rueda sin deslizar. En consecuencia, el movimiento se puede tratar como una rotación pura respecto al eje instantáneo de rotación (eje de contacto entre el cilindro y el plano inclinado): 1 3 T ω I = I ′ + m2 R 2 = m2 R 2 + m2 R 2 = m2 R 2 2 2 3 a m2 g sin α R − TR = Iα = I 2 = m2 Ra2 m2 g sin α R 2 fr y de aquí se obtiene que: + 3 3 m2 g cos α m2 g sin α − T = m2 a2 → T = m2 g sin α − m2a2 2 2 m2 g - Teniendo en cuenta que toda la cuerda se mueve con la misma aceleración, a1 = a2 = a , y que las tensiones de la cuerda sobre el cilindro y el bloque son iguales, dado que la polea no tiene masa, entre las dos ecuaciones anteriores se puede eliminar la tensión, m2 3 ( µc g + a ) = m2 g sin α − a 2 2 3 2 g sin α − a = µc g + a 2 2 g sin α − µc g g = 2 g sin α − µc g = 4a → a = 4 8 b) Velocidad del CM del cilindro en la base del plano inclinado. La variación de la energía mecánica total entre elo instante iniial y el momento en el que el cilindro llega a la base del plano inclinado es igual al trabajo de la fuerza de rozamiento que actúa sobre el bloque. Por lo tanto, Ei = m2 g 3R + m1 gh 1 1 1 E f = m2 gR + m1 gh + m1v 2 + m2 v 2 + I ′ω 2 2 2 2 2 1 m2 2 1 11 v = m2 gR + m1 gh + v + m2 v 2 + m2 R 2 2 2 2 2 22 R 1 1 1 = m2 gR + m1 gh + m2 v 2 + m2 v 2 + m2 v 2 = m2 gR + m1 gh + m2 v 2 4 2 4 además, W = − µc m1 g 2R m 2R = −0.5 2 g = − m2 gR sin α 2 0.5 entonces, E f − Ei = W → − m2 gR = m2 gR + m2v 2 − m2 g 3R 116 0 = v 2 − gR → v = gR Como el CM del cilindro se desplaza siguiendo un movimiento uniformemente acelerado, con aceleración g 8 , la velocidad que tiene cuando ha recorrido la distancia 2 R sin α también se puede calcular utilizando la ecuación: v = 2 ( g 8)( 2 R sin α ) = gR c) Altura a la que sube el cilindro por la ladera opuesta del plano inclinado, que no tiene rozamiento. Dado que el plano inclinado no tiene rozamiento, el cilindro desliza sin rodar y, por lo tanto, su energía cinética de rotación no varía (no actúa ningún momento externo que modifique la velocidad angular del cilindro). En este caso, tendremos que: 1 1 1 1 E f = m2 gR + m2 v 2 + I ′ω 2 = m2 gR + m2 gR + I ′ω 2 2 2 2 2 1 E f ′ = m2 gh′ + I ′ω 2 2 y en consecuencia, 3 E f = E f ′ → m2 gh′ = m2 gR → h′ = 3R 2 2 Ésta es la altura que alcanza el CM del cilindro antes de volver a caer. 4.6.3 Cilindro, polea y yoyó m1 , R m2 , R Un yoyó de masa m2 i radio R cae verticalmente bajo la acción de la gravedad al irse desenrollando la cuerda que supondremos sin masa. Tal como se muestra en la figura, la cuerda pasa a través de una polea de masa despreciable, y estira del eje de un cilindro macizo de masa m1 y del mismo radio R que el yoyó, que rueda sobre la superficie horizontal sin deslizar. El coeficiente de rozamiento estático entre el cilindro y la superficie horizontal es µe . a) Calcular las aceleraciones del cilindro y el yoyó. b) Calcular la tensión de la cuerda. c) Si m2 = 3m1 , determinar el valor de µe para que el cilindro ruede sin deslizar. a) Aceleraciones del yoyó y el cilindro. Sean a1 y a2 son las aceleraciones, en el sistema de referencia laboratorio, del cilindro y el yoyó, respectivamente. Al desenrollarse la cuerda, el yoyó rueda sin deslizar sobre ésta, de tal forma que por el punto P pasa un eje instantáneo de rotación. Teniendo en cuenta que la cuerda cae con la misma aceleración a1 a la que se a1 desplaza el cilindro, la aceleración del CM del yoyó respecto al punto P CM es a2 − a1 . Por lo tanto, la aceleración angular del CM respecto a P es: P a −a α2 = 2 1 a2 R Ésta será también la aceleración angular con la que gira el yoyó alrededor del CM, ya que se cumple la condición de rodadura. Consideraremos por 117 separado las ecuaciones del movimiento del cilindro y del yoyó. Las fuerzas que actúan sobre cada uno de estos objetos se indican en la figura siguiente. N α1 T a1 α2 T fr a1 m2 g m1 g a2 - Ecuaciones del movimiento para el cilindro. (1) : T − f r = m1 a1 N − m1 g = 0 1 a 1 f r R = m1R 2α1 ; α1 = 1 → (2) : f r = m1 a1 2 2 R - Ecuaciones del movimiento para el yoyó: (3) : m2 g − T = m2 a2 1 1 m2 R 2α 2 ; α 2 = ( a2 − a1 ) R → (4) : T = m2 ( a2 − a1 ) 2 2 La ecuación que describe la rotación del yoyó respecto a su CM es válida aunque el yoyó constituye un sistema no inercial, ya que está aplicada a un eje que pasa por el CM. Sumando las ecuaciones (1) y (3) por un lado, y (2) y (4) por otro, se eliminan la tensión entre ellas y se obtiene: m2 g − f r = m1a1 + m2 a2 3 (5) : m2 g = m1a1 + m2 a2 1 2 f r = m1a1 2 1 3 1 m2 g − m2 ( a2 − a ) = m2 a2 → (6) : m2 g = m2 a2 − m2 a1 2 2 2 Si ahora sumamos la ecuación (5) con la (6) multiplicada por − 2 3 obtendremos una ecuación que sólo depende de a1 , TR = 2 3 1 m2 g − m2 g = m1a1 + m2a1 → 3 2 3 a1 = 2m2 g 9m1 + 2m2 Sustituyendo la expresión para a1 en la ecuación (5), podemos obtener una expresión para a2 , 3m1 a2 = 1 − g 9m1 + 2m2 b) Tensión de la cuerda. De la ecuación (3) podemos despejar T y sustituir a2 , m2 g = 3 2m2 m1 g + m2 a2 2 9m1 + 2m2 T = m2 g − m2 a2 → → T= 3m1m2 9m1 + 2m2 c) Valor mínimo de µe para que el cilindro ruede sin deslizar cuando m2 = 3m1 . La fuerza de rozamiento estática máxima valdrá f r = µe N = µe m1 g . Por lo tanto, de la ecuación (1) tendremos que: 118 f r = T − m1a1 = 3m1m2 2m1m2 m1m2 f m1 g− g= g → µe = r = 9m1 + 2m2 9m1 + 2m2 9m1 + 2m2 m1 g 9m1 + 2m2 Si m2 = 3m1 → µe = 1 5 . 119