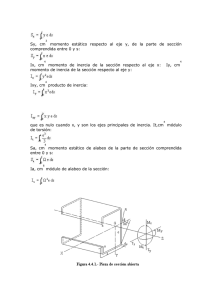
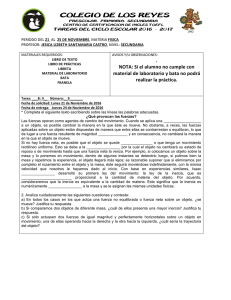
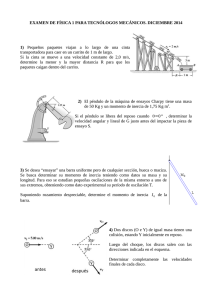
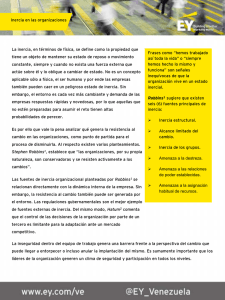
Capítulo VIII MOMENTOS DE INERCIA 8.1 INTRODUCCIÓN En este capítulo desarrollaremos un método para determinar el momento de inercia de un área y de un cuerpo que tenga una masa específica. El momento de inercia de un área es una propiedad importante en ingeniería, puesto que ésta debe determinarse o especificarse si uno va a analizar o diseñar un miembro de una estructura o parte mecánica. Por otro lado, se debe conocer el momento de inercia del cuerpo si se estudia el movimiento del mismo cuerpo. 8.2 MOMENTOS DE INERCIA PARA ÁREAS Cuando se determina el centroide de un área se considera el primer momento de área con respecto a un eje, es decir, para el cálculo se evalúa una integral de la forma: x dA Las integrales del segundo momento de un área tal como: x 2 dA son llamadas momentos de inercia del área. El momento de inercia de un área se origina siempre al tener que calcular el momento de una carga distribuida, variable en forma lineal, del eje de momentos. y x dA Si consideramos un área A, en el plano xy, los momentos de inercia de esta área con respecto a los ejes x e y se define por: A I x y 2 dA K x2 A A r O I y x 2 dA K y2 A y A Dónde: K x = radio de giro con respecto al eje x x K y = radio de giro con respecto al eje y Asimismo podemos formular el segundo momento del área con respecto al polo O, o eje z. Esto se conoce como momento polar de inercia J0 y se define por: J o r 2 dA I x I y ; Donde: r 2 x 2 y 2 A 126 Notas: - I x , I y y J o son siempre positivos. - Las unidades del momento de inercia son: m4, cm4, mm4, pulg4. 8.3 TEOREMA DEL EJE PARALELO PARA UN ÁREA (TEOREMA DE STEINER) “El momento de inercia de un área con respecto a un eje es igual al momento de inercia del área con respecto a un eje paralelo que atraviesa su centroide, más el producto del área y el cuadrado de la distancia perpendicular entre los ejes” y y y! dx dx I x I x! Ad y2 x! dA x! ! dA y y! c x! c d d I y I y! Ad x2 x! dy J o J c Ad 2 dy o x x O Donde: dx y dy son distancias perpendiculares entre los ejes. 8.4 RADIO DE GIRO DE UN ÁREA El radio de giro de un área plana se utiliza en el diseño de columnas en mecánica de estructuras. Siempre y cuando se conozcan las áreas y los momentos de inercia, el radio de giro se determina con las fórmulas: Kx 8.5 Ix A Ky Iy A K0 J0 A MOMENTOS DE INERCIA DE ÁREAS COMPUESTAS El momento de inercia de un área compuesta es igual a la suma algebraica de los momentos de inercia de todas sus partes componentes. Método de cálculo: - Divide el área compuesta en sus partes componentes e indique la distancia perpendicular existente desde el centroide de cada parte hasta el eje de referencia. 127 - Determine el momento de inercia de cada parte con respecto a su eje centroidal, paralelo al eje de referencia, utilizando el Teorema de Steiner. - Calcule el momento de inercia del área total, con respecto al eje de referencia, sumando los resultados de sus partes componentes. Si una parte componente tiene un “agujero”, su momento de inercia se obtiene restando el momento de inercia del agujero al momento de inercia de la parte completa, incluyendo al agujero. 8.6 PRODUCTO DE INERCIA DE UN ÁREA Para algunas aplicaciones de diseño mecánico o estructural es necesario primero calcular el producto de inercia del área así como también sus momentos de inercia para los ejes x y y dados. Para un área A, el producto de inercia y A x viene dado por: dA I xy xy dA A Las unidades del producto de inercia y son: m4, mm4, pie4, pulg4. x TEOREMA DE STEINER PARA EL PRODUCTO DE INERCIA DE UN ÁREA y y! dx Para el área sombreada que se muestra en la figura, se cumple que: x! dA y! c I XY I X 'Y ' A d x d y x! Dónde: I dy o X 'Y ' representa el producto de inercia del área con respecto al eje centroidal. x 128 8.7 MOMENTOS DE INERCIA DE MASAS El momento de inercia de masa es una propiedad que mide la resistencia del cuerpo a una aceleración angular. Se define como la integral del “segundo momento” con respecto a un eje de todos los elementos de masa dm que componen el cuerpo. Para el cuerpo rígido mostrado en la figura, su momento de inercia de masa con respecto al eje z, viene dado por: z I r 2 dm m r dm r = distancia perpendicular desde el eje hasta el elemento diferencial “ dm ”. * El eje que generalmente se elige para el análisis atraviesa el centro de masa del cuerpo. OBSERVACIONES: a) Si el cuerpo se compone de un material cuya densidad es variable, entonces el momento de inercia de masa “ I ” está dado por: I r 2 dV V b) Si es constante, entonces “ I ” se halla por: I r 2 dV V Nota: El teorema de Steiner (o del eje paralelo) para el momento de inercia de masa, viene dado por la siguiente expresión: I IG m d 2 dónde: I G = momento de inercia con respecto al eje z´ que atraviesa el centro de masa G. m = masa del cuerpo d = distancia perpendicular entre los ejes paralelos. 129 8.7.1 MOMENTOS DE INERCIA DE MASA PARA UN DISCO CIRCULAR DELGADO DE MASA “m” Y RADIO “r” z Para calcular los momentos de inercia del disco circular delgado se debe recordar que en coordenadas cilíndricas, el volumen para el elemento diferencial de r’ r dm ϕ y z masa “dm”, mostrado en la figura, viene dado por: dV r ' dr ' d dz x Cálculo de I z (momento de inercia del disco circular delgado, respecto al eje z) Por definición, el momento de inercia del disco circular delgado, respecto al eje z que atraviesa su centro de masa, viene dado por: I z (r ' ) dm 2 , r ' = distancia perpendicular del eje z al elemento “dm” m Se cumple: dm dV (r ' dr ' d dz) Reemplazando “ dm ”, la ecuación de Iz queda: Resolviendo la integral y reemplazando la densidad “ ” del disco circular: m m , V r2 z obtenemos que: 1 Iz mr2 2 Cálculo de I x (momento de inercia del disco circular delgado, respecto al eje x) Por definición, el momento de inercia del disco circular delgado, respecto al eje x que atraviesa su centro de masa, viene dado por: 2 I x (r ' ' ) dm , r ' ' = distancia perpendicular del eje x al elemento “dm” m 130 Al trazar la distancia perpendicular r ' ' , desde el eje x hasta el elemento diferencial “dm”, se obtiene que: r ' ' r ' sen Si esta distancia r ' ' y el diferencial de masa “dm” se reemplazan en la ecuación del momento de inercia I x , tenemos: z 2 r IX (r ' sen ) 2 ( r ' dr ' d dz ) 0 0 0 Resolviendo la integral y reemplazando la densidad “ ” del disco circular: m m , V r2 z obtenemos que: IX 1 m r2 4 NOTA.- debido a la simetría de la figura, el momento de inercia del disco circular delgado, respecto al eje y que atraviesa su centro de masa, es igual al momento de inercia respecto al eje x. Es decir: IY I X 1 m r2 4 131 8.7.2 MOMENTOS DE INERCIA DE MASA PARA UN CILINDRO DE MASA “m”, ALTURA “h” Y SECCIÓN TRANSVERSAL DE RADIO “r” z r Para calcular los momentos de dz r inercia y’ h/2 z del recomienda cilindro elegir se como elemento diferencial un disco circular delgado de masa “dm”, y radio “r” y espesor “dz”, tal como se observa en la figura. h/2 x Cálculo de I z (momento de inercia del cilindro, respecto al eje z) El momento de inercia para el cilindro, respecto al eje z que atraviesa su centro de masa, se halla a partir del valor conocido del momento de inercia para un disco delgado. Se cumple: dI z (CILINDRO ) 1 (dm) r 2 2 Dónde: dm dV ( r dz ) 2 * Como el elemento diferencial (disco circular delgado) y el cilindro son del mismo material, entonces su densidad es la misma. Esta densidad la hallo dividiendo la masa del cilindro entre su respectivo volumen, es decir: Reemplazando “ dm ” m m V ( r 2 h) en la ecuación del momento de inercia “ dI z (CILINDRO ) ” e integrando, obtenemos: I z (CILINDRO ) 1 mr 2 2 132 Cálculo de I Y (momento de inercia del cilindro, respecto al eje y) El momento de inercia para el cilindro, respecto al eje y que atraviesa su centro de masa, se halla a partir del valor conocido del momento de inercia para un disco delgado y aplicando el teorema de Steiner o teorema del eje paralelo. Por lo tanto, se cumple: dI Y ( CILINDRO ) 1 (dm) r 2 (dm) z 2 4 Reemplazando “ dm ” e integrando, obtenemos: I Y (CILINDRO ) 1 m (3 r 2 h 2 ) 12 NOTA.- debido a la simetría de la figura, el momento de inercia del cilindro, respecto al eje x que atraviesa su centro de masa, es igual al momento de inercia respecto al eje y. Es decir: I X (CILINDRO ) IY (CILINDRO ) 1 m (3 r 2 h 2 ) 12 8.7.3 MOMENTOS DE INERCIA DE MASA PARA UNA ESFERA DE MASA “m” Y RADIO “r” z r’ Al igual que en el caso del dz cilindro, para calcular los momentos de inercia de la r esfera se recomienda elegir como elemento diferencial y un disco circular delgado de masa “dm”, radio “r ‘ ” z y espesor “dz”, tal como se observa en la figura. x 133 Debido a la simetría de la figura, los momentos de inercia para la esfera, respecto a los tres ejes coordenados que atraviesan su centro de masa, son iguales. En consecuencia es suficiente calcular sólo uno de ellos. Cálculo de I X (momento de inercia de la esfera, respecto al eje x) El momento de inercia para la esfera, respecto al eje x que atraviesa su centro de masa, se halla a partir del valor conocido del momento de inercia para un disco delgado y aplicando el teorema de Steiner o teorema del eje paralelo. Por lo tanto, se cumple: dI X ( ESFERA ) 1 (dm) (r ' )2 (dm) z 2 4 De la figura se observa que: z 2 (r ' ) 2 r 2 (r ' ) 2 r 2 z 2 dm dV (r ' )2 dz dm (r 2 z 2 ) dz * Como el elemento diferencial (disco circular delgado) y la esfera son del mismo material, entonces su densidad es la misma. Esta densidad la hallo dividiendo la masa de la esfera entre su respectivo volumen. Es decir: m m 4 V r3 3 2 Reemplazando “ dm ” y “ (r ' ) ” en la ecuación del momento de inercia “ dI X (ESFERA ) ” e integrando, obtenemos: I X ( ESFERA ) 2 m r2 5 Nota.- se cumple que: I X ( ESFERA ) I Y ( ESFERA ) I Z ( ESFERA ) 2 m r2 5 134 8.7.4 MOMENTOS DE INERCIA DE MASA PARA UNA PLACA DELGADA DE MASA “m” Y LADOS “a” Y “b” z y x r dm a y b x Para calcular los momentos de inercia de la placa delgada elegimos un elemento diferencial de masa “dm”, ubicado a una distancia perpendicular “r”, respecto al eje z, tal como se aprecia en la figura. De ella también se concluye que las componentes de r : “x” e “y”, son distancias perpendiculares del elemento diferencial a los ejes coordenados. Además, asumiremos que la placa delgada tiene espesor “z”. Cálculo de I z (momento de inercia de la placa delgada, respecto al eje z) Por definición, el momento de inercia de la placa delgada, respecto al eje z que atraviesa su centro de masa, viene dado por: I z r 2 dm , r = distancia perpendicular del eje z al elemento “dm” m Se cumple: dm dV (dx dy dz) De la figura se observa que: r x y 2 2 2 2 Reemplazando “ r ” y “ dm ”, la ecuación de z/2 Iz b/2 a/2 (x 2 Iz queda: y 2 ) ( dx dy dz ) z / 2 b / 2 a / 2 Resolviendo la integral y reemplazando la densidad “ ” de la placa delgada: m m , V a b z obtenemos que: Iz 1 m (a 2 b 2 ) 12 135 Cálculo de I X (momento de inercia de la placa delgada, respecto al eje x) Por definición, el momento de inercia de la placa delgada, respecto al eje x que atraviesa su centro de masa, viene dado por: 2 I x (r ' ) dm , r ' = distancia perpendicular del eje x al elemento “dm” m Al trazar la distancia perpendicular r ' , desde el eje x hasta el elemento diferencial “dm”, se observa que esta distancia es igual a la distancia “y”. Es decir: r ' y Si esta distancia “ r ' ” y el diferencial de masa “dm” se reemplazan en la ecuación del momento de inercia I x , tenemos: z/2 IX b/2 a/2 (y) 2 ( dx dy dz ) z / 2 b / 2 a / 2 Resolviendo la integral y reemplazando la densidad “ ” de la placa delgada: m m , V a b z obtenemos que: IX 1 m b2 12 Cálculo de I Y (momento de inercia de la placa delgada, respecto al eje y) Para calcular el momento de inercia I Y se procede de manera similar al cálculo de I X . En este caso, la distancia perpendicular del eje y que atraviesa su centro de masa, al elemento diferencial, es “x”. Al evaluar la ecuación del momento de inercia I Y se obtiene que: IY 1 m a2 12 136 8.7.5 MOMENTOS DE INERCIA DE MASA PARA UN PRISMA RECTANGULAR DE MASA “m” Y LADOS “a”, “b” y “c” z a y c dy y b x Cálculo de I X (momento de inercia del prisma rectangular, respecto al eje x) El momento de inercia para el prisma rectangular, respecto al eje x que atraviesa su centro de masa, se halla a partir del valor conocido del momento de inercia para una placa delgada, y además aplicando el teorema de Steiner o teorema del eje paralelo. Por lo tanto, se cumple: dI X ( PRISMA) 1 (dm) (c) 2 (dm) y 2 12 El elemento diferencial tiene masa: dm dV (a c dy ) * Como el elemento diferencial (placa delgada) y el prisma rectangular son del mismo material, entonces su densidad es la misma. Esta densidad la hallo dividiendo la masa del prisma entre su respectivo volumen. Es decir: m m V a b c Reemplazando “ dm ” en la ecuación del momento de inercia “ dI X (PRISMA) ” e integrando, obtenemos: I X ( PRISMA) 1 m (c 2 b 2 ) 12 137 Cálculo de I Y (momento de inercia del prisma rectangular, respecto al eje y) El momento de inercia para el prisma rectangular, respecto al eje y que atraviesa su centro de masa, se halla a partir del valor conocido del momento de inercia para una placa delgada. Por lo tanto, se cumple que: dI Y ( PRISMA ) donde: dm dV (a c dy ) ; 1 (dm) (a 2 c 2 ) 2 siendo: m m V a b c Reemplazando “ dm ” en la ecuación del momento de inercia “ dI Y ( PRISMA) ” e integrando, obtenemos: IY ( PRISMA) 1 m (a 2 c 2 ) 12 NOTA.- para calcular el momento de inercia del prisma rectangular, respecto al eje z que atraviesa su centro de masa, se procede de manera similar al cálculo del momento de inercia con respecto al eje x. Procediendo de esta forma, se obtiene que: I z ( PRISMA) 1 m (a 2 b 2 ) 12 138 8.8 TABLA 8.1 – Momentos de inercia de formas corrientes 139 TABLA 8.1 – Momentos de inercia de formas corrientes (Continuación) Fuente: RILEY W. y STURGES L. Estática. Editorial Reverté. 2005 140 8.9 PROBLEMAS RESUELTOS DE MOMENTOS DE INERCIA PROBLEMA Nº 1 Determine el momento de inercia de masa Iz del sólido que se forma al girar el área sombreada 3 alrededor del eje z. La densidad del material es 7,85 Mg/m . z z 2 8y 4m y x Resolución Al girar el área sombreada alrededor del eje z, se obtiene el sólido mostrado a continuación. Para calcular el momento de inercia de dicho sólido elijo como elemento diferencial un disco circular delgado porque se conoce sus momentos de inercia de masa, respecto a los ejes x, y, z. z Se sabe que: Disco circular delgado de masa “m” 1 I x I y m r 2 4 r 1 I z m r 2 2 y x 141 z R=2m r dz z 2 8y 4m z y y x Para el problema dado, el momento de inercia del disco será un diferencial del momento de inercia del sólido, es decir: dI Z ( SOLIDO) 1 (dm) r 2 . . . (1) 2 Dónde: ry z2 r 8 z4 dm dV ( r dz ) dm dz 64 2 ; Reemplazamos en (1): dI Z ( SOLIDO) 1 z4 z4 dz 2 64 64 Integrando tenemos: 4 I Z ( SOLIDO) 1 z 8 dz 2(64)(64) 0 I Z ( SOLIDO) 87 685,546 kg m 2 142 PROBLEMA Nº 2 El cilindro circular mostrado está hecho de aluminio con densidad de 2 700 kg/m 3 y hierro con densidad de 7 860 kg/m3. Determine sus momentos de inercia con respecto a los ejes x´ e y´. Resolver el problema tomando como referencia los valores conocidos de los momentos de inercia de un disco circular delgado. y y’ Al C.M. z Fe 60 cm 10 cm 60 cm z’ x, x’ Resolución Primero hallo masa del aluminio m Al , masa del hierro m Fe y la coordenada “x” del centro de masa del cilindro compuesto ( x ). Las masas m Al y m Fe se determinan utilizando la ecuación m V , dado que la densidad del cuerpo ( ) es dato del problema y el volumen V se halla multiplicando el área de la sección transversal y la altura. Es decir: mAl Al VAl 2700 kg / m3 ( 0,12 )(0,6) m3 m Al 50,8938 kg mFe Fe VFe 7860 kg / m3 ( 0,12 )(0,6) m3 mFe 148,1575 kg Para calcular x (coordenada “x” del centro de masa) aplico la ecuación siguiente: x x m x m Al m Al x Fe mFe m Al mFE * De la figura dada se obtiene que: x Al 0,3 m x 0,7466 m y xFe 0,9 m Cálculo de I x ' (TOTAL ) (momento de inercia para el cilindro compuesto, respecto al eje x ' ) Por tratarse de un cilindro compuesto se cumple el principio de superposición, es decir que el momento de inercia total, respecto al eje x ' , es igual a la suma de los momentos de inercia del cilindro de aluminio y del cilindro de hierro, con respecto al mismo eje x ' . 143 I x ' (TOTAL ) I x ' ( Al ) I x ' ( Fe ) . . . (1) Hallo I x ' ( Al ) (momento de inercia del cilindro de aluminio, respecto al eje x ' ): Si consideramos como elemento diferencial un disco circular delgado de radio r, masa dm y espesor dx, se sabe que su momento de inercia, respecto al eje x ' , está dado por: dI x ' ( Al ) 1 (dm) r 2 2 ; donde: dm Al ( r ) dx 2 Reemplazamos “ dm ”: dI x ' ( Al ) 1 ( Al r 2 dx) r 2 2 Integrando, tenemos: I x ' ( Al ) Al r 4 2 0, 6 I x ' ( Al ) 0,25497 kg m 2 dx 0 Hallo I x ' ( Fe ) (momento de inercia del cilindro de hierro, respecto al eje x ' ): En este caso, se cumple: dI x ' ( Fe ) 1 (dm) r 2 2 ; donde: dm Fe ( r ) dx 2 Reemplazamos “ dm ” : dI x ' ( Fe ) 1 ( Fe r 2 dx) r 2 2 Integrando, tenemos: I x ' ( Fe ) Fe r 4 2 1, 2 dx I x ' ( Fe ) 0,740789 kg m 2 0, 6 Reemplazando en la ecuación (1), tenemos: I x ' (TOTAL ) 0,94526 kg m 2 Cálculo de I y ' (TOTAL ) (momento de inercia para el cilindro compuesto, respecto al eje y ' ) En este caso debemos recordar que el momento de inercia para un cilindro de masa “m”, altura “h” y sección transversal de radio “r”, respecto al eje centroidal “y”, el cual es perpendicular al eje del cilindro, viene dado por la ecuación siguiente: r I y (Cilindro) 1 m (3 r 2 h 2 ) 12 h Eje centroidal y 144 Aplicando esta ecuación y el principio del eje paralelo, tenemos que el momento de inercia del cilindro de aluminio, respecto al eje y ' , está dado por: 1 2 m Al (3 r 2 h 2 ) m Al d1 12 I y ' ( Al ) I y ' ( Al ) 1 m Al (3 r 2 h 2 ) m Al (0,7466 0,3) 2 12 I y ' ( Al ) 11,804896 kg m 2 Para comprender mejor la ecuación anterior, ver la figura siguiente: y Eje centroidal para el aluminio y’ Al Eje centroidal para el hierro d1 d2 0,3 m C.M. z Fe 10 cm x 0,7466 m 0,9 m x, x’ z’ Para el cilindro de hierro, tenemos: I y ' ( Fe ) I y ' ( Fe ) 1 2 mFe (3 r 2 h 2 ) mFe d 2 12 1 (148,1575) (3 0,12 0,6 2 ) 148,1575 (0,9 0,7466) 2 12 I y ' ( Fe ) 8,307495 kg m 2 Para calcular I y ' (TOTAL ) aplicamos principio de superposición. Es decir: I y ' (TOTAL ) I y ' ( Al ) I y ' ( Fe ) I y ' (TOTAL ) 20,106391 kg m 2 145