1036-1st Report-modified
Anuncio

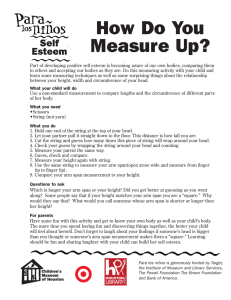
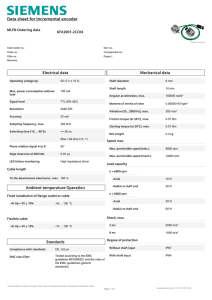
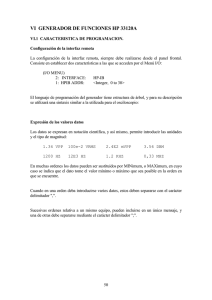
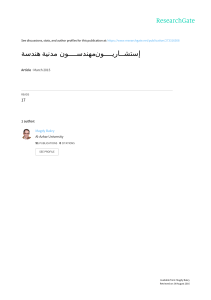
Subject: EM1036 - Dynamics of Machines & Vibrations Lab session 1: Introduction to vibration measurement. Free vibration. Curso: 2018/2019 Names: Pablo Martínez Andrés Husam Alsaqqa Duwairi Juan Manuel Escrig Beltrán Joan Arin Beltran We have to remark that all the obtained signals correspond to harmonic motion although it is not expressly said. 15. Obtain the fundamental period of the signals by measuring the distance between two consecutive peaks or valleys. Check whether the period is independent of the measurement point (A1 or A2). Figure 1. Waveform measurement from regular system (both channels) Input A (accelerometer in the middle of the ruler) u1 = 10.62 t1 = 0.001953 u2 = 6.48 t2 = 0.073 T a = 0.073 − 0.001953 = 0.071 s Input B (accelerometer in the end of the ruler) u1 = 14.6845 t1 = 0.008789 u2 = 12.316 t2 = 0.0781 T b = 0.0781 − 0.008789 = 0.069 s Observing the obtained results it can be said that although there it is a slightly difference between boths periods Ta and Tb, Ta-Tb= 0.002s, the period is constant in any point of the whole beam. That result was already expected because the vibration of the beam is represented by the same harmonic signal for all the beam so we always obtain the same period. 16. Is the registered vibration damped or undamped? Where can the damping come from? Obtain the natural frequency of the vibration using the period. Looking at the waveform graphic it can be affirmed that the registered vibration is damped because the amplitude of the vibration decreases with the pass of time. The registered vibration is damped despite that the system itself that is being analyzed doesn't have damping element. The damping effect is mostly caused by the effect of the hysteretic damping related to the material and the friction produced by the clamping of the beam. Natural frequency of the vibration using the period ωn= 2π Ta → 2*π 0.071 → 88, 49 rad s 17. Obtain the damping coefficient applying both logarithmic decrement and half amplitude methods in both points (A1 & A2). Input A (accelerometer in the middle of the ruler) ● logarithmic decrement method u δ = ln u1 = ln 10.62 = 0.5 → ζ ≃ 6.48 2 ● = 0.5 2Π = 0.078 1 half amplitude method For u ≃ 1 δ 2Π u1 2 = 7.36→ N = 3 cycles → ζ ≃ 0.11 N = 0.11 2 = 0.055 The values of the damping coefficient in point A are pretty big probably because of measurements accuracy. Input B (accelerometer in the end of the ruler) ● logarithmic decrement method u δ = ln u1 = ln 14.684 = 0.175 → ζ ≃ 12.316 2 ● δ 2Π = 0.175 2Π = 0.028 half amplitude method For u ≃ u1 2 = 7.36→ N = 3 cycles → ζ ≃ 0.11 N = 0.11 3 = 0.037 22. Compare the natural frequency obtained from the waveform with the peaks in the spectrum representation. Is there more than one peak? What might this represent? Compare the measured frequencies with the theoretical value for a cantilever beam, and with the natural frequency estimated using a 1 DoF model. Figure 2. Spectrum measurement from regular system (both channels) ω n = 88, 49 rad s obtained from the waveform Input A Amplitude-1: 0.52 G’s →w1 = 13.50 Hz→ 84.82 rad s Amplitude-2: 0.314 G’s →w2 = 87 Hz→ 546.6 rad s Input B Amplitude-1: 1.536 G’s →13.5 Hz → 84.82 rad s Amplitude-2: 0.248 G’s →87 Hz → 546.6 rad s These data represents that there are two different waves (harmonic motion) in the same graph. One with high frequency but small amplitude (In the graph of the Input A frequency of 87Hz and amplitude of 0,314 G’s and in the graph of the Input B frequency of 87Hz and amplitude of 0,248 G’s) and the other with less frequency but higher amplitude (In the graph of the Input A frequency of 13.5Hz and amplitude of 0.52 G’s and in the graph of the Input B frequency of 13.5Hz and amplitude of 1.536 G’s). This secondary response belongs to a second vibration mode with a different natural frequency. This is caused by the fact that our system is not a real 1 DoF but a real system with infinite degrees of freedom, so the excitation has induced two of all these DoF. Theoretical value of the natural frequency for a cantilever beam Theoretical expression for the natural frequency of a cantilever beam ω n = 1.8752 √ E *I m*l3 L= 48e −2 m E=6.867e10 Pa I= 1 12 1 · w · e3 → I = 12 · 0.02 · 0.005 V= 48 · 2 · 0.5 → 48cm 3 → 2.083e −10 m 4 3 m=2.7 · 48 → 129.6 g → 0.1296 kg ω n = 1.8752 * √ 6.867*1010 *2.083*10−10 3 0,1296*(48*10−2 ) = 111, 06 rad s Value of the natural frequency estimated using a 1 DoF model ωn= d= m V √ K m k= where 3·E·I L3 and I= 1 12 · w · e3 →m=d·V V=L · w · e V= 48 · 2 · 0.5 → 48cm 3 m=2.7 · 48 → 129.6 g → 0.1296 kg For this model we will just take to account half2 mass of the beam to obtain more precise results. m → 0.1296 → 0.0648 kg 2 2 This is because the beam is considered built-in so not all the mass of the beam contributes the motion. 1 I= 12 · 0.02 · 0.005 3 → 2.083e K= 3·6.867e10·2.083e−10 → 388.019 3 (48e−2) −10 m 4 N m L=48e-2 m E=6.867e10 Pa d= 2.7 g/c m3 ωn= √ 388.019 0.0648 → 77.38 rad s ω n (estimated) = 77.38 rad s ω n (theoretical) = 111, 06 rad s Comparing both values we can observe that there it is a big difference between both values. This result is caused because the theoretical method take into account ideal conditions but the estimated method is a more realistic one, observing that the estimated method is quite more similar to the experimental one. 23. Obtain the adjusted mass for a 1 DoF model of the system for studying the displacement of the free endpoint of the beam, from the experimental data obtained. ωn= √ k= 3·E·I L3 I= 1 12 K m →m = w2n K 2 →m=0.04778 kg 1 · w · e3 → I = 12 · 0.02 · 0.005 E=6.867e10 Pa L=48e-2 m K= 3·6.867e10·2.083e−10 → 388.019 3 (48e−2) N m 3 → 2.083e −10 m 4 m= w2n K 2 → m=0.04778 kg 24. Check the effect of increasing the system damping on both the waveforms and the spectra. To do so, mount the plastic wing between both accelerometers. Waveform from increased damping system Figure 3. Waveform measurement from increased damping system (both channels) Input A (consecutive peaks) Amplitud: 3.20102 G’s→t = 0.001953 s Amplitud: 2.50281 G’s→t = 0.060547 s Input A (Nº ciclos) Amplitud: 3.20102 G’s→t = 0.001953 s Amplitud: 1.75446 G’s→t = 0.141602 s N=2 Input B (consecutive peaks) Amplitud: 5.65574 G’s→t = 0.067383 s Amplitud: 3.89215 G’s→t = 0.148438 s Input B (Nº ciclos) Amplitud: 5.65574 G’s→t = 0.067383 s Amplitud: 2.51962 G’s→t = 0.219727 s N=2 Spectrum from increased damping system Figure 4. Spectrum measurement from increased damping system (both channels) Input A Amplitud: 0.55197 G’s→13 Hz→ 81.68 rad s Amplitud: 0.20313 G’s→86 Hz→ 540.35 rad s Input B Amplitud: 1.7984 G’s→13 Hz→ 81.68 rad s Amplitud: 0.15741 G’s→86 Hz→ 540.35 Comparison rad s F1.Regular system F3.Increased damping system Watching boths waveform measurements we can notice that in the regular system we can observe that the vibration of the increased damping system decreases faster than the vibration of the regular system. As expected, the increase of the damping has result in a vibration of smaller amplitude and faster decreasing of the amplitude. F2.Regular system 1.536 G’s → 84.82 rad s F4.Increased damping system 1.7984 G’s→ 81.68 rad s Observing both spectrum measurements we can can see that we obtain two oscillations with a very similar frequencies but with some differences due to the damping effects. As expected the increase of damping has changed the value of the frequency, decreasing it, due to: But as the difference between boths frequencies is not very big we can assume that the damping factor has had a very small increase meaning that the plastic wing has barely changed the damping of the system. The frequency of the increased damping system if smaller than the regular system verifying the increase of damping. Obtaining the new damping factor: 81.68 = 84.82 * √1 − ζ 2 → ζ = 0.0726 ζ 1 = 0.028 ζ 2 = 0.0726 The new damping factor ( ζ 2 = 0.0726 ) is 1.5 times bigger than the first damping factor ζ 1 = 0.028 ) but it is not considered that the system has much damping. 25. Check the effect of modifying the system stiffness on both the waveforms and the spectra. To do so, reduce the free length of the beam (this will also change the system mass, though). ( Waveform from decreased stiffness system Figure 5. Waveform measurement from decreased stiffness system (both channels) Input A Amplitud: 4.75996 G’s→t = 0.005859 s Amplitud: 3.95248 G’s→t = 0.055664 s Input A (Nº ciclos) Amplitud: 4.75996 G’s→t = 0.005859 s Amplitud: 2.31629 G’s→t = 0.105469 s N=2 Input B Amplitud: 10.9173 G’s→t = 0.003906 s Amplitud: 10.727 G’s→t = 0.051758 s Input B (Nº ciclos) Amplitud: 10.9173 G’s→t = 0.003906 s Amplitud: 4.79541 G’s→t = 0.212891 s N=4 Spectrum from decreased stiffness system Figure 6. Spectrum measurement from decreased stiffness system (both channels) Input A Amplitud: 0.2948 G’s → 19 Hz→ 119.38 rad s Amplitud: 0.28895 G’s → 123 Hz→ 772.83 Amplitud: 0.15G’s → 342 Hz → 2148.85 rad s rad s Input B Amplitud: 1.56628 G’s→19 Hz→ 119.38 rad s Amplitud: 0.26882 G’s → 122.5 Hz→ 769.69 Comparison rad s F1.Regular system F5.Decreased stiffness system Watching boths waveform measurements we can notice that in the regular system we can observe that both vibrations decrease just as fast . As expected, the decrease of the stiffness has result in a vibration of bigger amplitude. The decreasing of the amplitude is the same in both signals due to that the stiffness does not affect to that. We have to mark out that in this case the stiffness decrease has not increased the amplitude in a big way because there has been a decrease of the mass. F2.Regular system 1.536 G’s → 84.82 rad s F6.Decreased stiffness system 1.56628 G’s→ 119.38 rad s Observing both spectrum measurements we can can see that we obtain two oscillations with a different frequencies but similar amplitudes. In this case, the decrease of both stiffness and mass has changed the value of the frequency making it bigger due to: The result expected of a less stiffness system is a lower frequency but the decrease of the mass has affected to oscillation obtaining a higher frequency. 26. Check the effect of modifying the system mass on both the waveforms and the spectra. To do so, hang the weight close to the beam endpoint. Waveform from increased mass system Figure 7. Waveform measurement from increased mass system (both channels) Input A Amplitud: 1.527 G’s → t = 0.003406 s Amplitud: 0.4587 G’s→t = 0.2363 s Input A (Nº ciclos) Amplitud: 1.527 G’s→t = 0.0.003406 s Amplitud: 0.4587 G’s→t = 0.2363 s N=1 Input B Amplitud: 1.37176 G’s→t = 0.006836 s Amplitud: 1.00524 G’s→t = 0.2294 s Input B (Nº ciclos) Amplitud: 1.37176 G’s→t = 0.006836 s Amplitud: 0.61112 G’s→t = 0.7207 s N=3 Spectra from increased mass system Figure 8. Spectrum measurement from increased mass system (both channels) Input A Amplitud: 0.0637 G’s → 4.5 Hz → 28.27 rad s Amplitud: 0.06114 G’s → 76.5 Hz → 480.66 rad s Amplitud: 0.02126 G’s → 246.5 Hz → 1548.80 Input B Amplitud: 0.23017 G’s → 4 Hz → 25.13 rad s Amplitud: 0.01291 G’s → 76.5 Hz → 480.66 Comparison rad s rad s F1.Regular system F5.Increased mass system A increase of the mass should derive to a signal with higher amplitudes and not smaller like the obtained. This is because the mass added to the system acts like a brake to the move of the ruler and makes the vibration to end very fast. F2.Regular system 1.536 G’s → 84.82 rad s F8.Increased mass system 0.23017 G’s → 4 Hz → 25.13 rad s Observing both spectrum measurements we can can see that we obtain two oscillations with a different frequencies and amplitudes. As expected, the increase of mass has changed the value of the frequency making it smaller due to: