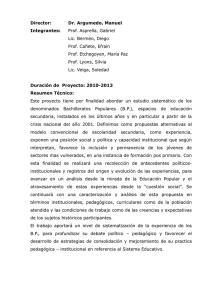
LAB. DE MECÁNICA DE SÓLIDOS 2016 “Año de la consolidación del Mar de Grau” LABORATORIO N° 2 “ESTÁTICA: SEGUNDA CONDICIÓN DE EQUILIBRIO” CARRERA : Mantenimiento y Gestión de Equipo Pesado CICLO :I SECCIÓN : “G” DOCENTE : Karol Tafur Ubillús CURSO : Laboratorio de Mecánica de Sólidos ALUMNO : FECHA DE ENTREGA : 14 de Setiembre 2016-II Prof. Karol Tafur Ubillús Página 1 LAB. DE MECÁNICA DE SÓLIDOS 2016 ÍNDICE I. OBJETIVOS…………………………………………………..……..…………… Pág.5 II. FUNDAMENTO TEÓRICO………………………………….……….……….… Pág. 5-6 2.1 CONDICIONES DE EQUILIBRIO.......................................................... Pág.5 2.2 SEGUNDA CONDICIÓN DE EQUILIBRIO……………………..………. Pág. 6 2.3 TORQUE DE UNA FUERZA………………………………..….….……... Pág.6 III. MATERIALES, HERRAMIENTAS Y EQUIPOS……………………….…….. Pág.7 IV. PROCEDIMIENTO………………………………………………………..……… Pág.8 V. DATOS…………………………………………………………………….…….. Pág.9-15 VI. OBSERVACIONES…………………………………………….……….………. Pág.16 VII. RECOMENDACIONES………………………………………………..……… Pág.16 VIII. CONCLUSIONES……………………………………………….………..….. Pág.16 IX. LINKOGRAFÍA…………………………………………………….….………… Pág.16 Prof. Karol Tafur Ubillús Página 2 LAB. DE MECÁNICA DE SÓLIDOS 2016 INTRODUCCIÓN En el presente informe daremos a conocer lo que se desarrolló en el laboratorio con ayuda del docente y la teoría brindada, para así lograr experimentar y anotar los diferentes resultados obtenidos. La Estática estudia el equilibrio de los cuerpos, es decir, aquellos cuerpos que se encuentran tanto en reposo como en movimiento y a una velocidad constante. En esta práctica de estática y segunda condición de equilibrio, se pretende llegar a comprobar experimentalmente la segunda condición de equilibrio, para fuerzas coplanarias y no concurrentes. Con ayuda de sensores, algunas pesas dadas por el docente y mediante el programa Pasco Casptone pudimos observar en el software los diferentes comportamientos que se produce según el peso o fuerza aplicada por los sensores. Por lo tanto este laboratorio será útil para verificar los datos obtenidos por métodos teóricos con los resultados obtenidos experimentalmente y contrastarlos con los procedimientos dados que nos deben dar respuestas parecidas. Este laboratorio nos ayudará mucho para despejar todas nuestras dudas sobre estos temas tratados en clase. Prof. Karol Tafur Ubillús Página 3 LAB. DE MECÁNICA DE SÓLIDOS 2016 LABORATORIO DE MECÁNICA DE SÓLIDOS LABORATORIO 2 “ESTÁTICA: SEGUNDA CONDICIÓN DE EQUILIBRIO” Prof. Karol Tafur Ubillús Página 4 LAB. DE MECÁNICA DE SÓLIDOS 2016 I. OBJETIVOS: Comprobar experimentalmente la segunda condición de equilibrio, para fuerzas coplanares no concurrentes. Verificar los resultados obtenidos experimentalmente y contrastarlos con los procedimientos teóricos. Establecer las diferencias. II. FUNDAMENTO TEÓRICO: 2.1 CONDICIONES DE EQUILIBRIO: Esta condición de equilibrio implica que una fuerza aislada aplicada sobre un cuerpo no puede producir por sí sola equilibrio y que, en un cuerpo en equilibrio, cada fuerza es igual y opuesta a la resultante de todas las demás. Así, dos fuerzas iguales y opuestas, actuando sobre la misma línea de acción, sí producen equilibrio. El equilibrio puede ser de tres clases; estable, inestable e indiferente. SI un cuerpo está suspendido, el equilibrio será estable si el centro de gravedad está por debajo del punto de suspensión; inestable si está por encima, e indiferente si coinciden ambos puntos. Si un cuerpo está apoyado, el equilibrio será estable cuando la vertical que pasa por el centro de gravedad caiga dentro de su base de sustentación; inestable cuando pase por el límite de dicha base, e indiferente cuando la base de sustentación sea tal que la vertical del centro de gravedad pase siempre por ella. FIGURA 2.1: CONDICIONES DE EQUILIBRIO Prof. Karol Tafur Ubillús Página 5 LAB. DE MECÁNICA DE SÓLIDOS 2016 2.2 SEGUNDA CONDICIÓN DE EQUILIBRIO: La suma algebraica de las torcas aplicadas a un cuerpo con respecto a un eje cualquiera perpendicular al plano que los contiene es igual a cero. Momento de fuerza o torca; produce una rotación de un cuerpo alrededor de un punto fijo físicamente llamado eje. El momento de fuerza con respecto a un punto cualquiera, es el producto de la fuerza por la distancia perpendicular del centro de momento a la fuerza (brazo de momento). Los signos de este pueden ser positivos cuando el movimiento es anti-horario con respecto a su eje, y negativos cuando es horario con respecto a su eje. FIGURA 2.2: SEGUNDA CONDICIÓN DE EQUILBIRIO (FÓRMULAS) 2.3 TORQUE DE UNA FUERZA: Se define l torque T de una fuerza F que actúa sobre algún punto del cuerpo rígido, en una posición r respecto de cualquier rigen, por el que puede pasar un eje sobre el cual se produce la rotación del cuerpo, al producto entre posición r y la fuerza aplicada F. 𝛕=𝐫×𝐅 El torque es una magnitud vectorial, si q es el ángulo entre r y F, su valor numérico por definición del producto vectorial, es: 𝛕 = 𝐫 (𝐅 × 𝐒𝐞𝐧𝛉) Prof. Karol Tafur Ubillús Página 6 LAB. DE MECÁNICA DE SÓLIDOS 2016 III. MATERIALES, HERRAMIENTAS Y EQUIPOS: N° DESCRIPCIÓN CANTIDAD 01 Computadora con programa PASCO capstone 1 02 Interfase Power link 1 03 Sensor de Fuerza 2 04 Pesa de 0.5 N 5 05 Varillas 2 06 Bases soporte 1 07 Nuez doble 1 08 Grapas 2 09 Cuerda 1 10 Regla y calculadora 2 11 Botas dieléctricas 2 12 Guardapolvo blanco 1 TABLA 3: MATERIALES, HERRAMIENTAS Y EQUIPOS FIGURA 3: EPPS, MATERIALES Y HERRAMIENTAS Prof. Karol Tafur Ubillús Página 7 LAB. DE MECÁNICA DE SÓLIDOS 2016 IV. PROCEDIMIENTO: 1. Nos aseguramos de cumplir con las normas dentro del laboratorio para no tener inconvenientes con la realización de la práctica. 2. Realizamos el primer montaje, tal y como se muestra en la figura 4.1. Momento de fuerza o Torque. FIGURA 4.1: MOMENTO DE FUERZA O TORQUE 3. Luego, ingrese al programa PASCO Capstone, anote los valores obtenidos del programa y llene los cuadros correspondientes. 4. Después, realice el segundo montaje, tal y como se aprecia en la siguiente figura. Momento de Fuerza con Varias Fuerzas Aplicadas. FIGURA 4.1: MOMENTO DE FUERZA CON VARIAS FUERZAS APLICADAS 5. Anote los valores obtenidos y llene los cuadros correspondientes. 6. Finalmente, anotar las conclusiones de la práctica que se realizó. Prof. Karol Tafur Ubillús Página 8 LAB. DE MECÁNICA DE SÓLIDOS 2016 V. DATOS: PRIMER MONTAJE (MOMENTO DE FUERZA O TORQUE) PRIMER CASO SEGUNDO CASO TERCER CASO F1 N 0.64 0.64 0.64 0.64 0.23 0.87 0.64 0.64 0.64 L1 cm 12 6 3 12 4 12 5 6 6 Lf cm 12 6 3 12 4 12 5 6 6 F N 12 12 12 12 12 12 12 6 3 L1 . F1 N . cm 0.64 0.30 0.15 0.6 0.06 0.24 0.26 0.31 1.25 Lf . F N . cm 7.68 3.84 1.92 7.68 0.92 10.44 3.2 3.84 3.84 Error % 0% 6.25 % 6.25 % 6.25 % 21.05 % 3.44 % 0% 3.12 % 2.34 % Prof. Karol Tafur Ubillús Página 9 LAB. DE MECÁNICA DE SÓLIDOS 2016 PRIMER CASO Prof. Karol Tafur Ubillús Página 10 LAB. DE MECÁNICA DE SÓLIDOS 2016 SEGUNDO CASO Prof. Karol Tafur Ubillús Página 11 LAB. DE MECÁNICA DE SÓLIDOS 2016 TERCER CASO Prof. Karol Tafur Ubillús Página 12 LAB. DE MECÁNICA DE SÓLIDOS 2016 SEGUNDO MONTAJE (MOMENTO DE FUERZA CON VARIAS FUERZAS APLICADAS) PRIMER CASO SEGUNDO CASO TERCER CASO CUARTO CASO F1 N 0.23 0.23 0.23 0.23 F2 N 0.23 0.64 0.64 0.64 F3 N 0.64 0.87 F N 0.38 0.81 1.66 1.05 L1 cm 4 5 3 3 L2 cm 10 12 8 6 L3 cm 12 10 LF cm 8 10 8 12 ∑ Li . Fi N . cm 3.22 8.83 13.49 13.23 LF . F N . cm 3.04 8.1 13.28 12.6 ERROR % 5% 7.95 % 1.19 % 4.54 % Prof. Karol Tafur Ubillús Página 13 LAB. DE MECÁNICA DE SÓLIDOS 2016 PRIMER CASO Prof. Karol Tafur Ubillús SEGUNDO CASO Página 14 LAB. DE MECÁNICA DE SÓLIDOS 2016 TERCER CASO Prof. Karol Tafur Ubillús CUARTO CASO Página 15 LAB. DE MECÁNICA DE SÓLIDOS 2016 VI. OBSERVACIONES: En algunas cajas donde se encontraban las pesas estaban incompletas, lo que ocasionó un ligero retraso en el desarrollo del laboratorio. Hubo algunos inconvenientes en la regla cuando colgamos las pesas y el sensor de fuerza, debido a que el sensor de fuerza tenía mucho mayor peso, no se lograba un equilibrio por lo que tuvimos que utilizar una varilla con una nuez doble para sostenerlo. VII. RECOMENDACIONES: Seguir las instrucciones especialmente, cuando del docente realizamos los del curso montajes en y todo momento, manipulamos las herramientas. Reiniciar los sensores de fuerza cada vez que sea utilizado. Manipular con suma cautela las pesas ya que al caer pueden dañar las laptops o los sensores de fuerza. VIII. CONCLUSIONES Para que haya equilibrio en un cuerpo las 2 fuerzas deben ser iguales (mismo peso) y opuestas (sentido) actuando sobre la misma línea de acción. Un cuerpo se encuentra en equilibrio de rotación cuando la suma algebraica de todos los momentos con respecto a cualquier punto es igual a cero. En la práctica realizada, mientras más era la distancia a la que se encontraban las pesas del punto de origen, mayor eran las fuerzas de torques. ↑ 𝜏 =↑ 𝑟 × 𝐹 En la práctica realizada, el sensor de fuerza iba en sentido anti-horario y las pesas en sentido horario, las cuales se contrastaban en cuanto a fuerzas para que se llegue al equilibrio y con distintos valores de torques. IX. LINKOGRAFÍA http://segundaleydeequilibriorotacional.blogspot.pe/2011/02/segunda-condicionequilibrio-de.html http://6afisica.blogspot.pe/2011/02/condiciones-de-equilibrio-2da.html http://es.slideshare.net/LuisGonzalez95/segunda-condicion-de-equilibrio11793176?next_slideshow=1 Prof. Karol Tafur Ubillús Página 16