Tesis Doctoral Modelización Proyectiles Base Burn Fernando Aguirre Estevez
Anuncio

ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
I.-1
I.-2
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO I
ÍNDICE
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
I.-3
I.-4
I.-ÍNDICE
I. Índice
II. Introducción
III. Estado del arte
IV. Aerodinámica de un proyectil base burn
V. Análisis de un proyectil base burn
VI. Cálculo numérico de un proyectil base burn
VII. Evaluación del centro de masas y del momento de inercia de un
proyectil asistido
VIII. Optimización
IX. Algoritmo de recocido simulado
X. Algoritmos genéticos
XI. Recocido simulado frente a algoritmo genético
XII. Modelización de proyectiles base burn método 1
XIII. Modelización de proyectiles base burn método 2
XIV. Conclusiones
XV. Bibliografía
XVI. Programas
I.-5
I.-6
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO II
INTRODUCCIÓN
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
II.-1
II.-2
II.-INTRODUCCIÓN
1. Resumen
El aumento del alcance sin el aumento del calibre ha supuesto la incorporación de
determinados dispositivos a los proyectiles de artillería. En este punto, se han formulado
dos tendencias fundamentales; en primer lugar, el incorporar sistemas de propulsión
adicional a los proyectiles lo cual ha provocado el nacimiento de los cohetes y de los
proyectiles de propulsión adicional (RAP); y en segundo lugar, se han incorporado
dispositivos que permiten disminuir la resistencia de los proyectiles inyectando algún
fluido por el culote del proyectil lo que se ha denominado como proyectiles base burn o
proyectiles base bleed (BB).
Los fundamentos teóricos que sostienen la modelización numérica en la que se basa un
proyectil base burn se encuentra en forma de STANAG´s, artículos y los códigos de
software de NABK (NATO Armaments Ballistic Kernel). Estos documentos contienen
la información necesaria para modelizar el vuelo de un proyectil base burn pero para
ello es necesario el conocimiento de una serie de coeficientes balísticos.
En este trabajo se intentará clarificar la tecnología asociada a un proyectil base burn, su
modelización y tratamiento matemático. La primera dificultad que aparece es que la
modelización de proyectiles base burn se ha incluido en el STANAG 4355 de dos
formas diferentes. Por un lado, se tiene el método 1 (método empleado por los países
francófonos) y por el otro, el método 2 (método desarrollado por los EE.UU. y
empleado por los países anglófonos). Estos dos métodos difieren totalmente entre si,
siendo las bases de datos muy diferentes. La utilización de uno u otro modelo va a
depender del país propietario de la munición y cada uno de ellos tiene sus
inconvenientes y sus ventajas. El método 1 resulta más intuitivo al utilizar conceptos
como velocidad de combustión, densidad del propulsante y superficie de quemado
sumando al sistema de siete ecuaciones del Modelo Modificado de Masa Puntual una
ecuación de variación de la masa mientras que el método 2 incorpora tres ecuaciones
más: la ecuación de variación de la masa, la del pseudotiempo y la del tiempo de
apagado del motor. Aún existe otro modelo más del que se tiene noticia, modelo
II.-3
desarrollado por Suecia, y que no aparece en el STANAG 4355.
Se comenzará este estudio considerando la resistencia aerodinámica de un proyectil así
como una descripción física de la unidad base burn. A continuación se analizará
detalladamente el Modelo Modificado de Masa Puntual para proyectiles base burn,
donde se construirá una aplicación informática en lenguaje C++ que mostrará las
trayectorias balísticas de diferentes proyectiles.
El cálculo de trayectorias balísticas efectuado numéricamente de un proyectil base burn
necesita del conocimiento de los coeficientes aerodinámicos, los coeficientes base burn
y los factores de ajuste. Los coeficientes aerodinámicos pueden obtenerse a través de
programas informáticos, de ensayos en túneles de viento o bien de bases de datos
suministradas por el fabricante del proyectil. No obstante, al aplicar el Modelo
Modificado de Masa Puntual para proyectiles base burn existe un conjunto de
coeficientes adicionales relativos al proceso de quemado del propulsante así como a la
disminución de la resistencia producida por el aumento de la presión en la base. Estos
coeficientes pueden obtenerse de ensayos en laboratorio o bien de bases de datos
suministradas por el fabricante del proyectil. La obtención del paquete aerodinámico no
supone un problema en la actualidad a través de aplicaciones informáticas, si bien la
obtención de los coeficientes adicionales base burn constituye un problema superior. La
principal aportación de esta tesis ha sido la determinación de estos coeficientes a través
de resultados de alcance, deriva y tiempo de extinción del motor base burn obtenidos de
experiencias realizadas mediante la resolución de un problema de optimación complejo,
desarrollando para ello una serie de herramientas numéricas.
Finalmente, y a efectos de ajustes finales en el cálculo de trayectorias se deben
encontrar cuatro parámetros denominados factores de ajuste, como se indica en los
STANAG 4355 y STANAG 4144, para la correcta modelización numérica según el
Modelo Modificado de Masa Puntual para proyectiles base burn.
II.-4
2. Palabras clave
Ácido desoxirribonucleico (ADN)
Deoxyribonucleic acid (DNA)
Acuerdo de estandarización
Standardization Agreement (STANAG)
Alcance
Range
Aleatorio
Random
Algoritmo de descenso
Descent algorithm
Algoritmo genético
Genetic algorithm (GA)
Altura de quemado
Height of burst (HOB)
Ángulo de ataque
Angle of attack
Ángulo de tiro
Quadrant elevation (QE)
Búsqueda en zonas próximas
Neighbourhood search
Búsqueda local
Local search
Búsqueda taboo
Taboo search
Capa de cortadura
Shear layer
Capa límite
Boundary layer
Centro de masas
Center of mass
Coeficiente balístico
Ballistic coefficient
Combustión
Combustion
Condición de parada
Stopping criterion
Condición de parada
Termination criterion
Corriente libre
Freestream
Cruce
Crossover
Deriva
Drift
Encendido
Igniter
Entradas de control de fuego
Fire control inputs (FCI)
Estela
Wake
Estocástico
Stochastic
Finalización de quemado
Burnout
Factor de ajuste
Fitting factor
Flujo másico
Mass flow
Fuerza de resistencia
Drag force
II.-5
Fuerza lateral
Lift force
Fuerza Magnus
Magnus force
Función objetivo
Fitness
Función objetivo
Objective function
Generador de gas
Gas generator
Heurística
Heuristic
Integración
Integration
Inyección de propulsante
Fuel injection
Masa de propulsante
Fuel mass
Mecánica de fluidos computacional
Computational Fluid Dynamics (CFD)
Mecánica estadística
Statistical mechanics
Mínimo global
Global minima
Mínimo local
Local minima
Momento de giro
Overturning moment
Momento de inercia
Axial moment of inertia
Mutación
Mutation
Núcleo Balístico de Armamento de la OTAN
NATO Armaments Ballistic Kernel (NABK)
Número de Mach
Mach number
Número de Reynolds
Reynolds number
Obús
Howitzer
Onda de choque
Shock wave
Onda de expansión
Expansion wave
Optimización
Optimization
Optimización combinatoria
Combinatorial optimization
Parámetro de inyección
Injection parameter
Presión de base
Base pressure
Presión en la cámara
Chamber pressure
Proyectil con resistencia de culote atenuada
Base bleed projectile (BB)
Proyectil con resistencia de culote atenuada
Base burn projectile (BB)
Proyectil de propulsión adicional
Rocket assisted projectile (RAP)
Punto de remanso
Stagnation point
Recocido simulado
Simulated annealing (SA)
II.-6
Reproducción
Reproduction
Retraso a la ignición
Ignition delay
Runge Kutta Fehlberg
Runge Kutta Fehlberg
Solución óptima
Optimal solution
Soplado
Bleeding
Temperatura adaptativa
Adaptive temperature
Temperatura del propulsante
Propellant temperature
Trayectoria
Trajectory
Tubo
Gun
Turbulencia
Turbulence
Vector de ataque
Yaw of repose
Velocidad de enfriamiento
Cooling schedule
Velocidad de rotación axial
Axial spin rate
Velocidad del sonido
Speed of sound
Velocidad en boca
Muzzle velocity
II.-7
II.-8
AGRADECIMIENTOS
Ante todo, debo expresar mi más profundo
agradecimiento
al
Coronel
del
Cuerpo
de
Ingenieros Politécnicos D. Francisco Cucharero
Pérez, gracias al cual se ha podido llevar a efecto
esta Tesis.
II.-9
II.-10
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO III
ESTADO DEL ARTE
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
III.-1
III.-2
III.-ESTADO DEL ARTE
1. Estado actual
Aunque en la actualidad se conoce la tecnología asociada a un proyectil base burn, su
modelización e interpretación desde un punto de vista matemático es una cuestión
aparte. La mayoría de la información existente se encuentra en forma de STANAG´s y
artículos siendo la principal fuente de información los STANAG 4355 y 4144 si bien el
estudio de los códigos de software de NABK (NATO Armaments Ballistic Kernel)
constituye una importante referencia a la hora de completar la información de los
propios STANAG´s. Estos documentos proporcionan la información necesaria para
modelizar el vuelo de un proyectil base burn, siempre que se hayan podido obtener los
coeficientes balísticos necesarios para ello.
El STANAG 4355, en su cuarta edición, trabaja con el Modelo Modificado de Masa
Puntual y con el Modelo de Masa Puntual, los cuales han sido completados para
modelar los proyectiles base burn. El modelo de seis grados de libertad resulta
demasiado complicado, siendo su principal inconveniente, más que su complejidad, la
ausencia de información, y la dificultad de obtenerla, que permita alimentar su
extensísima a la vez que espinosa base de datos. Este hecho, unido a que las ventajas de
este método en cuanto mejoras son prácticamente nulas, ha provocado que, en estos
momentos, se trabaje con el Modelo Modificado de Masa Puntual en un noventa por
ciento dejando el restante diez por ciento para el Modelo de Masa Puntual.
A esto hay que añadir que la modelización de proyectiles base burn se ha incorporado
en el STANAG 4355 de dos maneras. Por un lado, se tiene el método 1 (método
empleado por los países francófonos) y por otro, el método 2 (método desarrollado por
los EE.UU. y empleado por los países anglófonos). Estos dos métodos son
completamente diferentes siendo la comunalidad de las bases de datos prácticamente
cero. La utilización de uno u otro modelo depende del desarrollador y cada uno de ellos
tiene sus inconvenientes y sus ventajas. El método 1 resulta más intuitivo al utilizar
conceptos como velocidad de combustión, densidad del propulsante y superficie de
quemado adicionando al sistema de siete ecuaciones del Modelo Modificado de Masa
III.-3
Puntual una ecuación de variación de la masa mientras que el método 2 incorpora tres
ecuaciones más: la ecuación de variación de la masa, la del pseudotiempo y la del
tiempo de apagado del motor.
El cálculo de trayectorias balísticas efectuado numéricamente de un proyectil base burn
necesita del conocimiento de los coeficientes aerodinámicos, los coeficientes base burn
y los factores de ajuste.
Los coeficientes aerodinámicos pueden obtenerse a través de programas informáticos
existentes, de ensayos en túneles de viento o bien de bases de datos suministradas por el
fabricante del proyectil. Existen aplicaciones informáticas como PRODAS o McDrag
que proporcionan los coeficientes aerodinámicos a partir de la geometría del proyectil
en base a ciertos ajustes fenomenológicos obtenidos a partir de ensayos; o bien a partir
de la integración numérica de las ecuaciones de Navier Stokes, proceso conocido
abreviadamente como CFD (Computational Fluid Dynamics).
La modelización de un modo pormenorizado de la combustión del propulsante así como
de la reducción de la resistencia al aumentar la presión en la base se materializa en el
STANAG 4355 a través de una serie de funciones que caracterizan el comportamiento
del proyectil. Esto implica un conocimiento muy exhaustivo de la reacción química que
ocurre al quemarse el propulsante en la cámara de combustión y que provoca una
disminución de la resistencia al incrementarse la presión en la base por la inyección de
los gases procedentes de la combustión del propulsante.
Además, para describir apropiadamente el comportamiento de un proyectil base burn es
necesario conocer cuatro parámetros denominados "fitting factors" o factores de ajuste,
como se indica en los STANAG 4355 y STANAG 4144, en orden a crear
correspondencia entre los resultados obtenidos computacionalmente y las experiencias
observadas.
Actualmente la tecnología puntera en la modelización de proyectiles base burn está
representada para el método 1 por los estudios realizados por Chargelegue y Couloumy
de la Direction de Armaments Terrestres y para el método 2 por los trabajos
desarrollados por Gunners, Andersson y Hellgren, y por Danberg.
III.-4
En el método 1, Chargelegue y Couloumy implementaron un programa informático
conectado a un radar doppler de seguimiento de proyectiles que obtenía el coeficiente
de reducción de resistencia base burn en función del número de Mach de los proyectiles.
El coeficiente de reducción de resistencia base burn CxBB fue obtenido mediante la
diferencia de dos coeficientes de reducción de resistencia base burn medidos con el
radar en dos situaciones diferentes. Estos trabajos fueron expuestos en el 11º Simposio
Internacional de Balística celebrado en Bruselas en 1989.
En el método 2, los trabajos desarrollados por Gunners, Andersson y Hellgren, así como
por Danberg mostraron los mecanismos de reducción de resistencia de base para
proyectiles base burn. A partir de ciertas hipótesis de trabajo se llegó a la conclusión
final de que el coeficiente de resistencia de un proyectil base burn puede considerarse
igual al coeficiente de resistencia de un proyectil con la unidad base burn desactivada
menos la diferencia en la componente de resistencia de base entre un motor inerte y un
motor con la unidad base burn activa C D0 = C D0 − ΔC D0 . A partir de esta teoría, se
bb
bb
desarrolló un procedimiento que los investigadores aplicaron a la modelización del
proyectil M864 US CBL/DUP BB2 utilizando para ello una serie de complejos ensayos
en túnel de viento. Estos estudios fueron mostrados en el 13º Simposio Internacional de
Balística celebrado en Estocolmo en 1992; teniendo en cuenta, además la contribución
en lo relativo a la integración numérica de las ecuaciones de Navier Stokes, realizada
por Nietubicz y Sahu (1988), y expuesta en el 1º Simposio Internacional en Propulsión
Química celebrado en Grecia en 1989.
En este apartado también cabe destacar los trabajos actualmente en desarrollo realizados
por General Dynamics Santa Bárbara Sistemas (GDSBS) y Explosivos Alaveses S.A.
(EXPAL) en relación con la caracterización balística del proyectil ER-02/BB SP HEA
BB1 disparado por un obús 155/52 APU SBT, empleando el método 1; y utilizando para
ello una combinación de ensayos en laboratorio y experiencias. Determinando la
velocidad de quemado del propulsante en el laboratorio, Explosivos Alaveses calculó el
área de combustión del propulsante base burn SC a partir de la geometría de la unidad
base burn. También calculó el exponente n que afecta a la velocidad de combustión de
propulsante base burn VC a partir de ensayos en laboratorio. El coeficiente de reducción
III.-5
de resistencia base burn CxBB fue obtenido por General Dynamics SBS computando el
coeficiente de la fuerza de resistencia total con un radar. El coeficiente CxBB se obtuvo
comparando la diferencia existente en el coeficiente de la fuerza de resistencia entre un
proyectil con la unidad base burn activa y el mismo con la unidad base burn
desactivada. Los factores de ajuste se obtuvieron mediante un procedimiento
matemático a partir de los datos de alcance y deriva obtenidos de experiencias.
Finalmente, se deben reseñar los trabajos de investigación desarrollados en esta tesis.
No es objeto de este trabajo la determinación de los coeficientes aerodinámicos dado
que este problema se encuentra resuelto en la actualidad, de una forma u otra, como se
ha descrito antes. El Modelo Modificado de Masa Puntual para proyectiles base burn
necesita un conjunto de coeficientes adicionales relativos al proceso de quemado del
propulsante así como a la disminución de la resistencia producida por el aumento de la
presión en la base. Estos coeficientes base burn pueden obtenerse de ensayos en
laboratorio o bien de bases de datos suministradas por el fabricante del proyectil. Las
aportaciones de esta tesis abarcan la implementación de un método capaz de obtener los
coeficientes base burn necesarios para el cálculo a partir de alcance, deriva y tiempo de
extinción del motor base burn obtenidos de experiencias realizadas.
III.-6
2. Aportaciones
Ya se ha comentado anteriormente que para la modelización de una forma detallada del
proceso de quemado del propulsante así como de la reducción de la resistencia al
aumentar la presión en la base aplicando el Modelo Modificado de Masa Puntual para
proyectiles base burn es necesario conocer una serie de funciones que caracterizan el
comportamiento del proyectil. Esto conlleva un estudio muy preciso de la reacción
química que ocurre al quemarse el propulsante en la cámara de combustión y que
ocasiona una disminución de la resistencia al incrementarse la presión en la base por la
inyección de los gases procedentes de la combustión del propulsante.
Generalmente, el conocimiento de esta información se efectúa mediante ensayos en
laboratorios especializados. Estos ensayos conllevan el disponer de un equipamiento
muy costoso y únicamente se lo pueden permitir países con gran capacidad económica.
Una de las aportaciones de esta tesis es la construcción de un método más asequible
económicamente. Este método permitirá el cálculo de estas funciones de
caracterización a través de resultados de alcance, deriva y tiempo de extinción del
motor base burn obtenidos de experiencias.
Posteriormente podrá comprobarse cómo con los datos extraídos de experiencias se
construirá una función objetivo cuyo óptimo será la solución buscada. De este modo, el
problema de determinación de los coeficientes balísticos necesarios para modelizar
numéricamente un proyectil base burn de acuerdo al STANAG 4355 del Modelo
Modificado de Masa Puntual se reducirá a un problema de optimización que aunque
complicado y laborioso podrá resolverse empleando una serie de herramientas
numéricas desarrolladas a los efectos. El incremento del número de parámetros de los
que dependen las funciones a optimizar confieren un entorno de resolución muy árido
por lo que se han desarrollado una serie de procedimientos de búsqueda de soluciones
en un proceso iterativo de cálculo.
Como la modelización de proyectiles base burn se ha incorporado en el STANAG 4355
de dos maneras; método 1 (método empleado por los países francófonos) y método 2
(método desarrollado por los EE.UU. y empleado por los países anglófonos); siendo
III.-7
ambos métodos completamente diferentes, es necesario desarrollar dos metodologías
que, aunque nacen del mismo origen común, calculan coeficientes de caracterización
diferentes. Otra de las aportaciones de esta tesis es un procedimiento para calcular los
coeficientes de uno cualquiera de los dos métodos a partir de los coeficientes del otro
método.
2.1. Método 1
En el caso del método 1; inicialmente, será preciso calcular para diferentes ángulos de
tiro y cargas, el parámetro de inyección de eficiencia óptima I0, el área de combustión
del propulsante base burn SC, el coeficiente de reducción de resistencia base burn CxBB y
el exponente n que afecta a la velocidad de combustión de propulsante base burn VC a
partir de alcance, deriva y tiempo de extinción del motor base burn obtenidos de
resultados de experiencias.
Una vez configurados adecuadamente los coeficientes base burn, se deben determinar a
efectos de ajustes finales los factores de ajuste para la correcta modelización numérica
según el Modelo Modificado de Masa Puntual para proyectiles base burn método 1; a
partir de alcance, deriva y tiempo de extinción del motor base burn obtenidos de
experiencias. Para ello, deberá tenerse en cuenta que para cada carga; únicamente el
factor base burn f(iBB,MT) y el factor de sustentación fL son funciones del ángulo de tiro
siendo el tiempo de retraso a la ignición del motor base burn tDI función de la
temperatura de propulsante del motor MT y el factor de quemado con la velocidad de
rotación axial del proyectil K(p) una función lineal de la velocidad de rotación axial del
proyectil p.
2.2. Método 2
En el caso del método 2; inicialmente, será preciso calcular para diferentes ángulos de
tiro y cargas, el tiempo de referencia de apagado del motor t B* , el tiempo de referencia
*
de retraso a la ignición del motor base burn t DI
y la derivada de referencia de la masa de
propulsante del motor m& *f . A continuación, para cada carga, se calcula el tiempo de
retraso a la ignición del motor base burn tDI y la duración del motor base burn tB - tDI.
III.-8
Todos ellos a partir de alcance, deriva y tiempo de extinción del motor base burn
obtenidos de resultados de experiencias.
Una vez configurados adecuadamente los coeficientes base burn, se deben determinar a
efectos de ajustes finales los factores de ajuste para la correcta modelización numérica
según el Modelo Modificado de Masa Puntual para proyectiles base burn método 2; a
partir de alcance, deriva y tiempo de extinción del motor base burn obtenidos de
experiencias. Para ello, deberá tenerse en cuenta que para cada carga; únicamente el
factor base burn f(iBB,MT) y el factor de sustentación fL son funciones del ángulo de tiro
siendo el factor del tiempo de quemado de la velocidad de rotación axial del proyectil
base burn fBTp y el factor del tiempo de quemado de la presión del aire atmosférico local
del proyectil base burn fBTP constantes.
III.-9
III.-10
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO IV
AERODINÁMICA DE UN PROYECTIL BASE
BURN
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
IV.-1
IV.-2
IV.-AERODINÁMICA DE UN PROYECTIL BASE BURN
Existen diferentes tipos de resistencia aerodinámica. Básicamente, hay resistencias de
origen potencial y de origen viscoso, no calculables mediante teoría potencial.
El movimiento es irrotacional o potencial en una región del campo fluido cuando el
rotacional de la velocidad es nulo en todos los puntos de la región. El teorema de Stokes
asegura, entonces, la ausencia de circulación para toda línea cerrada, interior al dominio
de irrotacionalidad, reducible a un punto por deformación continua de la misma. La
circulación de la velocidad a lo largo de cualquier línea que une dos puntos cualesquiera
del dominio es independiente de la línea, para líneas reducibles unas a otras por
deformación continua.
Si el dominio de irrotacionalidad es simplemente conexo, toda línea cerrada interior al
dominio es reducible y el potencial de velocidades es unívoco. Si el dominio de
irrotacionalidad es múltiplemente conexo (como es el caso de un cuerpo sumergido en
un fluido), existirán líneas cerradas no reducibles que pueden tener circulación distinta
de cero. El potencial de velocidades es, en ese caso, multiforme. La multiplicidad de
conexión del dominio fluido irrotacional está ligada a la existencia de regiones de
vorticidad no nula, como capas de torbellinos, que aparecen en la estela en el
movimiento alrededor de cuerpos a grandes números de Reynolds.
El teorema de Bjerkness-Kelvin dice que la variación en la unidad de tiempo de la
circulación alrededor de una línea fluida cerrada, es igual a la circulación de la
aceleración. Si la aceleración deriva de un potencial, la circulación de la aceleración a lo
largo de la línea cerrada es nula y la circulación de la velocidad se mantiene constante.
Si inicialmente, el movimiento es irrotacional, se mantiene irrotacional como es el caso
de una corriente uniforme.
Las resistencias de origen potencial se dividen en resistencia inducida, calculable
mediante el plano de Trefftz, y la debida a las ondas de presión producidas por un móvil
que se desplaza en régimen supersónico (resistencia de onda).
IV.-3
El plano de Trefftz es un plano perpendicular a la corriente incidente no perturbada que
se encuentra en zonas muy alejadas aguas abajo. El movimiento inducido por los
torbellinos de la estela, en puntos muy alejados corriente abajo, de una superficie
sustentadora es plano y la teoría potencial demuestra que la vorticidad se encuentra
concentrada en esta estela. La resistencia inducida está relacionada con la huella que
deja la superficie sustentadora en el plano de Treffz y se calcula, conocida la
distribución de sustentación a lo largo de la envergadura. La interpretación física se
debe a herraduras de torbellinos, cuyas cabezas están situadas en la superficie
sustentadora y cuyas colas se extienden hasta el infinito formando la estela.
La siguiente expresión refleja, con carácter general, la dependencia de la sustentación
con la resistencia inducida, donde Λ es el alargamiento de la superficie sustentadora y τ
un factor mayor o igual que cero (es cero para una distribución de fuerza lateral
elíptica).
C Di =
C L2
(1 + τ )
π ⋅Λ
De entre las resistencias de origen viscoso, la resistencia de rozamiento se debe a la
viscosidad del fluido que desliza sobre la superficie del obstáculo y se adhiere a él, y es
calculable usando la aproximación de capa límite mientras que la resistencia de forma o
presión requiere un análisis más complejo, ya que en este caso, la capa límite se
encuentra parcialmente desprendida, lo que obliga a recurrir a ensayos experimentales o
análisis numéricos.
El espacio del movimiento puede dividirse en dos: uno, de pequeño espesor, formado
por el fluido que rodea al obstáculo, denominado, capa límite donde las fuerzas de
inercia y las de viscosidad son del mismo orden, y otro formado por el fluido exterior al
propio obstáculo, llamada región exterior, donde la viscosidad no cuenta y el fluido es
ideal.
En los fluidos perfectos o ideales, se desprecia la viscosidad al ser el número de
Reynolds muy grande. Cuando se aplica esta teoría al cálculo de la sustentación o fuerza
normal a la dirección del movimiento de un obstáculo, en el seno de una corriente fluida
IV.-4
uniforme, los resultados obtenidos coinciden con los experimentales. Sin embargo, si se
quiere calcular la resistencia o componente paralela a la dirección del movimiento, ésta
teoría es inaplicable, ya que de acuerdo con la paradoja de D´Alembert la resistencia es
nula para cualquier obstáculo finito. Es necesario tener en cuenta la capa límite.
La presión sufre variaciones muy pequeñas a través de la capa límite, por lo que las
presiones sobre el objeto pueden analizarse sin la capa límite. Pero la capa límite se
encuentra sometida a gradientes de presión adversos fuertes que pueden provocar su
desprendimiento.
La distribución de presiones sobre el obstáculo se aproxima bien salvo en la zona de
presión mínima, en la parte posterior. Las presiones medidas experimentalmente son
inferiores a las teóricas. La resistencia debida a este fenómeno, es la denominada
resistencia de forma, ya que depende de la forma del obstáculo. Esto se debe a que la
corriente se desprende de la superficie del obstáculo dando lugar a una fuerte estela de
torbellinos. La presión en la base del obstáculo influye fuertemente en la frecuencia de
desprendimiento de torbellinos. Generalmente, al aumentar la presión de base,
disminuye la frecuencia de desprendimiento.
La estela tiene su origen en la capa límite desprendida. Analizando la corriente exterior,
se presenta como una capa de torbellinos (discontinuidad tangencial de velocidades en
una superficie fluida). La capa límite al separarse, se enrolla formando anillos o líneas
de torbellinos que se desprenden alternativamente. En el límite, cuando el número de
Reynolds crece hasta el infinito, el espesor de estas regiones es nulo.
IV.-5
A continuación se va a considerar la resistencia de un proyectil sin resistencia inducida,
es decir, el ángulo de ataque es el apropiado para que la sustentación sea nula.
IV.-6
En las siguientes figuras puede observarse la zona de baja presión, en la parte posterior
de un proyectil, responsable en gran parte de la resistencia de forma. El aumento de la
presión en la base proporciona energía a la capa límite, retrasando su desprendimiento y
disminuyendo la resistencia de forma o de base.
IV.-7
La separación entre la zona turbulenta y potencial es clara, sugiriendo una forma
inclinada en la parte posterior del proyectil.
Una inclinación suave en la parte posterior del proyectil da como resultado el retraso en
el desprendimiento de la capa límite, disminuyendo la zona turbulenta y a su vez la
resistencia de base. Sin embargo, una inclinación muy grande en la parte posterior del
proyectil puede ocasionar el desprendimiento de la capa límite, al no tener la corriente
energía suficiente para acometer esa inclinación, lo cual resulta en un aumento de la
región turbulenta y consecuentemente de la resistencia, perdiendo la inclinación por el
culote la ventaja inicial.
IV.-8
No obstante, si esta forma inclinada, en la parte posterior, se continuará indefinidamente
terminando en un cono puntiagudo, se provocaría una reducción en la resistencia pero
una fuerte inestabilidad del proyectil, dado que la capa límite terminaría
desprendiéndose en algún punto, al estar sometida a un gradiente adverso de presión y
los torbellinos se desprenderían alternativamente, produciendo sacudidas en el proyectil.
De este modo, existe una configuración óptima de diseño de un proyectil:
Base burn o base bleed constituye un procedimiento, mediante el cual, se expulsa algún
tipo de gas, sin empuje, por la base del proyectil durante el vuelo. Este gas reduce la
resistencia de base, disminuyendo el vacío creado en la parte posterior del proyectil e
incrementando el alcance de una forma importante. La ausencia de propulsión adicional
tiene la ventaja de que no aumenta la dispersión del proyectil como ocurre en los
proyectiles RAP.
IV.-9
De acuerdo a la reducción de resistencia, característica de un dispositivo base bleed,
este proceso puede dividirse en tres fases: fase inicial transitoria, fase de quemado
estable y fase de quemado final. El coeficiente de resistencia correspondiente a cada
fase puede verse en la siguiente figura:
IV.-10
IV.-11
IV.-12
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO V
ANÁLISIS DE UN PROYECTIL BASE BURN
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
V.-1
V.-2
V.-ANÁLISIS DE UN PROYECTIL BASE BURN
La separación del flujo en la base de un proyectil conduce a la formación de una región
de recirculación a baja velocidad, cerca de la base. La presión en esta región es inferior
que la presión de la corriente libre. La resistencia de base causada por esta diferencia de
presión puede ser superior a dos terceras partes de la resistencia total de un cuerpo de
revolución. Técnicas como inducir una ligera inclinación por el culote, el base bleed o el
base burn se han usado para reducir la resistencia de base; sin embargo, se han aplicado
tradicionalmente de una forma empírica debido a la carencia de datos detallados o del
conocimiento suficiente de las interacciones fluidodinámicas que ocurren en la base.
La inyección de gases a baja velocidad, cerca de la estela del proyectil, reduce la
resistencia de base de un proyectil. Esto provoca un incremento del alcance en los
proyectiles de artillería. Esta técnica se denomina base bleed cuando no se considera
reacción en la transferencia de masa. El concepto base burn se refiere a la inyección de
masa por combustión de un propulsante situado en la base del proyectil. El propulsante
se aloja en una cámara y la inyección de masa ocurre a través de un orificio de la
cámara. Este agujero no es una tobera de forma que el empuje proporcionado por este
dispositivo es muy pequeño.
Los modelos numéricos son poco comunes en la determinación de flujos por la base,
debido a su complejidad. Las medidas en laboratorio no son muy exactas, por lo que los
sistemas que reducen la resistencia de base son difíciles de diseñar.
Un esquema de una unidad base burn puede verse en las siguientes figuras, donde se
esquematiza el dispositivo de ignición. Activado su encendido, el propulsante arde a
través de una membrana y los gases son expulsados por un orificio de gran diámetro,
practicado en la parte posterior del proyectil. Los gases arden en la cámara, durante un
tiempo del orden de treinta segundos, y el chorro generado sale por el orificio a
velocidad subsónica.
V.-3
En la figura siguiente se muestra un esquema fluidodinámico de un flujo supersónico
sobre un proyectil romo cilíndrico con base bleed. La corriente supersónica libre se
expande en la esquina de la base, al producirse la separación de la capa límite, y
apareciendo una capa libre de cortadura. Esta capa de cortadura se recomprime
V.-4
realineándose y desarrollándose alrededor del eje de simetría. La capa de cortadura
arrastra fluido de la zona posterior de la base, que es acelerado, retornando este fluido a
la región de la base, formando una zona de recirculación en el proceso. La inyección de
fluido a baja velocidad, por la base, desplaza los puntos de remanso aguas abajo,
correspondiendo su localización a un equilibrio entre la cantidad de movimiento de gas
inyectado y la cantidad de movimiento de fluido recirculado. La cantidad de fluido
inyectado se cuantifica a través del parámetro de inyección adimensional I
I=
4 ⋅ m& f
π ⋅ d b2 ⋅ ρ ⋅ v
donde m& f es la derivada de la masa de propulsante del motor, db el diámetro de la base
del proyectil, ρ la densidad del aire y v la velocidad aerodinámica.
Esta definición del parámetro de inyección no tiene en cuenta el espesor de la capa
límite y la cantidad de movimiento del fluido inyectado, los cuales afectan a la presión
en la base.
La dependencia de la relación de presión en la base respecto a la presión de la corriente
libre (Pb/P1), con el parámetro de inyección I muestra, desde un punto de vista
experimental, tres regímenes distintos de operación determinados por la cantidad de
masa inyectada. La relación Pb/P1 se incrementa casi linealmente para bajos valores de I
V.-5
(régimen 1). Un pico en Pb/P1 aparece para un valor intermedio de I (I = 0.01 en el aire),
el cual depende de varios factores, como el número de Mach de la corriente libre, el
tamaño y geometría del orificio de salida del fluido de sangrado, el parámetro de
inyección I, el peso molecular y la temperatura del gas soplado. Es posible obtener
incrementos en el valor máximo Pb/P1 de entre 10 y 90 %. Sobrepasado el valor óptimo
de Pb/P1, este disminuye (régimen 2) hasta alcanzar un mínimo relativo. Si se continua
aumentando el flujo de sangrado se alcanzaría la zona supersónica (régimen 3),
resultando en un incremento de Pb/P1.
De los resultados experimentales, la efectividad de los dispositivos base-bleed se
incrementa con el número de Mach de la corriente libre. A altos números de Mach, el
pico en la presión de base ocurre para un parámetro de inyección I inferior, siendo el
incremento en la presión de base superior.
Para bajos regímenes de sangrado, el incremento en la presión de base con el sangrado
es casi independiente del área de salida del gas, pero para regímenes altos de sangrado,
la efectividad del dispositivo base bleed aumenta con el área de salida del gas. La
inyección con bases porosas es también más efectiva.
Análisis efectuados con aire, hidrógeno, helio, argón y nitrógeno han mostrado que el
base bleed es más eficaz en la medida que el gas expelido tiene un peso molecular más
V.-6
bajo. El pico en la presión de base es más alto y ocurre para valores inferiores del
parámetro de inyección I, usando un gas más liviano. También se ha observado un
incremento en la presión de base calentando el gas sangrado. Para bajos regímenes de
inyección, la elevación de la presión de base es casi proporcional a la entalpía del gas.
El pico de la presión de base es mayor y ocurre para valores inferiores del parámetro de
inyección I, que para el caso correspondiente al sangrado del gas en frío. La inyección
de hidrógeno en combustión ha mostrado presiones en la base, mayores que con
sangrado en caliente, y el sangrado de gases con partículas combustibles sólidas es aún
más efectivo.
Aunque es conocida la efectividad del base bleed como una técnica de reducción de la
resistencia, los detalles exactos en cuanto a interacciones fluidodinámicas causadas por
el sangrado por el culote no son claramente comprendidos.
A continuación pueden observarse fotografías del flujo de inyección, para diferentes
parámetros de inyección I. Para sangrado nulo, se produce una fuerte onda de choque de
recompresión cerca del punto de remanso. De I = 0 a I = 0.0033 el ángulo de la capa de
cortadura se hace más pequeño, la expansión en la esquina de la base se debilita, la
estela se hace más ancha y las ondas de recompresión se debilitan. La onda de
recompresión se debilita, aún más, cerca de I = 0.0131 , cuando el flujo de sangrado
proporciona más fluido que el que requiere la capa de cortadura. Cuando el flujo de
sangrado se incrementa más allá de I = 0.0199, la onda de recompresión se desplaza
ligeramente aguas arriba. Para I = 0.0279, la garganta se bloquea al alcanzar la
velocidad de sangrado las condiciones sónicas. Una onda, que forma un disco de Mach,
surge del orificio de sangrado e interactúa con las ondas de choque oblicuas de
recomprensión, que vienen de la corriente exterior, formando una compleja interacción
de ondas de choque. Este sistema es altamente inestable.
Para I = 0.0148 se produce el sangrado óptimo, desde un punto de vista de presión de
base, donde la región de recirculación casi desaparece. En este punto, la presión de base
se maximiza, la estela se ensancha, el ángulo de la capa de cortadura se hace más
pequeño y la velocidad de reversa, a lo largo de la línea central, se hace muy pequeña.
Para I = 0.0226, no se detecta velocidad aguas arriba, a lo largo de la línea central, lo
que indica la penetración del chorro de sangrado hacia la zona de readherencia.
V.-7
V.-8
A continuación puede observarse un resultado computacional, resolviendo las
ecuaciones de Navier Stokes, para el proyectil M864, para flujo másico caliente y frío,
con valores del parámetro de inyección I superior a 0.04 .
V.-9
V.-10
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO VI
CÁLCULO NUMÉRICO DE UN PROYECTIL
BASE BURN
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
VI.-1
VI.-2
VI.-CÁLCULO NUMÉRICO DE UN PROYECTIL BASE BURN
1. Índice
1. Índice
2. Introducción
3. Modelo Modificado de Masa Puntual
4. Términos adicionales para proyectiles base burn método 1
5. Términos adicionales para proyectiles base burn método 2
6. Movimiento del proyectil referido al centro de gravedad
7. Vector de ataque
8. Cálculo numérico
8.1.
Datos aerodinámicos
8.2.
Datos base burn método 1
8.3.
Datos base burn método 2
8.4.
Factores de ajuste
8.5.
Datos varios
8.6.
Algoritmo de integración
8.7.
Ordenada máxima
8.8.
Condición de parada
8.9.
Atmósfera
9. Presentación de resultados
9.1.
Proyectil OE155F2RTC FR HEA BB1
9.2.
Proyectil OE155BONUS FR CBL/DUP BB1
9.3.
Proyectil M864 US CBL/DUP BB2
VI.-3
VI.-4
2. Introducción
Para la confección de este trabajo es necesario disponer de un algoritmo de cálculo
numérico, que sea capaz de describir matemáticamente la trayectoria balística de un
proyectil de artillería base burn. En este punto, se mostrará el desarrollo matemático
necesario para el cálculo de las diferentes trayectorias balísticas. Para ello se utilizará el
Modelo Modificado de Masa Puntual, según se describe en el STANAG 4355, por el
método 1 (método empleado por los países francófonos) y por el método 2 (método
desarrollado por los EE.UU. y empleado por los países anglófonos).
Con las bases matemáticas consideradas, se procederá a construir una serie de
aplicaciones informáticas de cálculo en lenguaje C++, empleando un compilador
Microsoft Visual Studio.NET. Las gráficas se construirán utilizando MATLAB R2006a.
Estas herramientas informáticas se aplicarán al cálculo de las trayectorias balísticas de
una serie de proyectiles de artillería.
Proyectil
calibre tubo
carga
MV
QE
OE155F2RTC FR HEA BB1
155
155AUF1
DLE-CE-155F1/7 C7
825.0
878.0
OE155BONUS FR CBL/DUP BB1
155
155
DLE-CE-B0/7 C7
DM52/8 CH8
808.0
698.0
891.3
OEF3BB NO HEA BB1
155AUF1
M109A3G
M864 US CBL/DUP BB2
155
DM662 NO CBL BB2
155
M198
M109A3G
M232/5H CH5H
DM52/8 CH8
810.0
670.0
En el cuadro se describe la designación del proyectil, indicando la nacionalidad, el tipo
de proyectil y el método de cálculo que emplea el país fabricante, el calibre, el tubo
empleado en el disparo, la carga, la velocidad en boca del arma MV correspondiente a la
carga referenciada y el ángulo de tiro QE que proporciona el máximo alcance.
Aunque hay dos proyectiles que son portadores de submunición, el objeto de este
apartado es el desarrollo de una capacidad matemática que permita calcular trayectorias
balísticas individuales de diferentes proyectiles, por lo que a efectos académicos se
considera, en estos proyectiles, una altura de quemado (HOB) de cero metros,
considerándose como proyectiles rompedores a los efectos de interés.
VI.-5
814.0
907.0
840.0
La experiencia acumulada en estos cálculos permite afirmar que los fenómenos de
interés aparecen a medida que las trayectorias son más amplias en tiempo, por lo que el
análisis presentado en este apartado se ha efectuado con la velocidad en boca más alta
con la que se pueden disparar dichos proyectiles, y con el ángulo de tiro QE con el que
se obtiene el máximo alcance.
El proyectil noruego OEF3BB NO HEA BB1 se corresponde con el proyectil francés
OE155F2RTC FR HEA BB1, pero disparado desde un tubo norteamericano M109A3G
y con una carga norteamericana DM52/8 CH8. Análogamente, el proyectil noruego
DM662 NO CBL BB2 se corresponde con el proyectil norteamericano M864 US
CBL/DUP BB2. Aunque físicamente son los mismos proyectiles con los mismos
coeficientes balísticos, algunos coeficientes se han adaptado a las estrictas condiciones
climatológicas de Noruega.
VI.-6
3. Modelo Modificado de Masa Puntual
Las siguientes ecuaciones constituyen un modelo matemático representativo del vuelo
de un proyectil estabilizado por rotación, dinámicamente estable (proyectil de artillería
convencional) y con simetría axial. La modelización matemática incluye solamente las
fuerzas y momentos esenciales despreciando los efectos transitorios.
Todos los vectores se referirán a un sistema de ejes a derechas, ortonormal y situado fijo
en el suelo. El sistema de coordenadas cartesianas con vectores unitarios se muestra en
la siguiente figura.
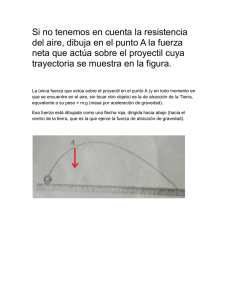
Las leyes de Newton referidas al centro de masas del proyectil son:
r
r
r
r
r
r
r
F = mu&& = DF + LF + MF + mg + mΛ
siendo u la velocidad del proyectil.
La aceleración debida a la fuerza de resistencia es:
VI.-7
(
))
⎛π ⋅ ρ ⋅i ⋅ d 2 ⎞
r
DF
⎟⎟ C D0 + C D 2 QD ⋅ α e2 ⋅ vv
= −⎜⎜
α
m
8m
⎠
⎝
(
siendo i y QD factores de ajuste, ρ la densidad del aire, d el diámetro del proyectil, m la
masa del proyectil, αe el ángulo de ataque, v la velocidad aerodinámica, y, CD0 y CDα2
coeficientes aerodinámicos.
La aceleración debida a la fuerza lateral es:
(
)
r
LF ⎛ π ⋅ ρ ⋅ d 2 ⋅ f L ⎞
⎟⎟ C Lα + C L 3 α e2 ⋅ v 2α e
= ⎜⎜
α
m ⎝
8m
⎠
r
siendo fL un factor de ajuste denominado factor de sustentación, α e el vector de ataque,
y, CLα y CLα3 coeficientes aerodinámicos.
La aceleración debida a la fuerza Magnus es:
3
MF d ⋅ QM ⋅ p ⋅ ρ ⋅ Cmag − f r r
(α e ∧ v )
=
8m
m
siendo QM un factor de ajuste denominado factor de la fuerza Magnus, p la velocidad de
rotación axial del proyectil y Cmag-f un coeficiente aerodinámico.
La aceleración debida a la gravedad es:
⎡ X1 ⎤
⎢ R ⎥
⎢ 2X ⎥
r
r
2
g = − g 0 R 2 r 3 ⋅ r = − g 0 ⎢1 −
⎥
R ⎥
⎢
⎢ X3 ⎥
⎢⎣ R ⎥⎦
(
)
g 0 = 9.80665[1 − 0.0026 cos(2 ⋅ lat )]
VI.-8
r r r
r = X −R
⎡ 0 ⎤
r ⎢ ⎥
R = ⎢− R ⎥
⎢⎣ 0 ⎥⎦
y
R = 6.356766 106 metros
con X1, X2 y X3 las coordenadas del proyectil y lat la latitud.
La aceleración debida a los efectos de la fuerza de Coriolis es:
v r
Λ = −2(ω ∧ u )
⎡ Ω cos(lat ) cos( AZ ) ⎤
⎥
Ω sin (lat )
ω = ⎢⎢
⎥
⎢⎣− Ω cos(lat ) sin ( AZ )⎥⎦
r
Ω = 7.292115 10-5 rad/s
siendo ω la velocidad de rotación de la tierra y AZ el acimut. Para el hemisferio Sur, lat
es negativa.
La magnitud de la aceleración de rotación axial del proyectil viene dada por:
p& =
π ⋅ ρ ⋅ d 4 ⋅ p ⋅ v ⋅ Cspin
8I x
siendo IX el momento de inercia axial del proyectil y Cspin un coeficiente aerodinámico.
El momento de inercia axial puede aproximarse por la siguiente expresión:
VI.-9
I X = 0.14 ⋅ m ⋅ d 2
La velocidad de rotación axial del proyectil en el instante inicial viene dada por:
p0 =
2 ⋅ π ⋅ u0
tc ⋅ d
donde el proyectil da una vuelta en tc calibres.
El vector de ataque viene dado por:
(
)
r r
8 ⋅ I x ⋅ p v ∧ u&
αe = −
π ⋅ ρ ⋅ d 3 CM α + CM 3 ⋅ α e2 ⋅ v 4
r
(
α
)
⎡0 ⎤
α e0 = ⎢⎢0⎥⎥
⎢⎣0⎥⎦
r
r
siendo α e0 el valor inicial del vector de ataque, y, CMα y CMα3 coeficientes
aerodinámicos.
La velocidad del proyectil en el instante inicial viene dada por:
⎡u0 cos(QE ) cos( AZ )⎤
r ⎢
⎥
u0 = ⎢
u0 sin (QE )
⎥
⎣⎢ u0 cos(QE )sin ( AZ )⎦⎥
La velocidad aerodinámica se obtiene de la expresión
r r r
v =u−w
r
siendo w la velocidad del viento.
VI.-10
La posición del proyectil en el instante inicial se toma el origen del sistema de
coordenadas.
El número de Mach
M=v/a
siendo a la velocidad del sonido que se puede tomar como:
a = 20.046 a (m/s)
La corrección por esfericidad terrestre se obtiene de:
X1
⎡
⎤
2
2 ⎥
r ⎢
(X + X 3 )⎥
E = ⎢X2 + 1
2R
⎢
⎥
X3
⎢⎣
⎥⎦
VI.-11
Los coeficientes aerodinámicos vienen dados como funciones del número de Mach.
Esas funciones están dadas en forma de polinomios de cuarto grado o inferior. Se
definen en regiones de números de Mach, desde M MAX i−1 hasta M MAX inclusive.
Cada coeficiente aerodinámico se describe como polinomios de la forma:
Ci = a0 + a1 ⋅ M + a2 ⋅ M 2 + a3 ⋅ M 3 + a4 ⋅ M 4
donde Ci es un coeficiente aerodinámico particular y M el número de Mach.
Símbolo
CD0
CDα2
CLα
CLα3
CMα
CMα3
Cmag-f
Cspin
Descripción
Unidad
Coeficiente de la fuerza de resistencia
para ángulo de ataque cero
Coeficiente cuadrático de la fuerza de
1/rad2
resistencia
Coeficiente de la fuerza de
1/rad
sustentación
Coeficiente cúbico de la fuerza de
1/rad3
sustentación
Coeficiente del momento de giro
1/rad
Dependencia
Mach
Coeficiente cúbico del momento de
giro
Coeficiente de la fuerza Magnus
1/rad3
Mach
1/rad2
-
Mach
Coeficiente
del
momento
amortiguamiento de rotación
de
Mach
Mach
Mach
Mach
Mach
En orden a crear correspondencia entre los resultados obtenidos computacionalmente y
las experiencias observadas, se definen los factores de ajuste.
En cuanto a los factores de ajuste dependientes del ángulo de tiro, se tienen el factor de
forma i y el factor de sustentación fL, que vienen dados para cada carga como:
VI.-12
f = a0 + a1 ⋅ (QE ) + a 2 ⋅ (QE ) + a3 ⋅ (QE )
2
3
siendo QE el ángulo de tiro.
El factor de resistencia de ataque QD y el factor de la fuerza Magnus QM se toman como
constantes.
Parámetro
Símbolo
i
Unidad
-
Factor de sustentación
fL
-
0.8<fL<1.2
Factor de resistencia de ataque
QD
-
0.5<QD<1.5
Factor de la fuerza Magnus
QM
-
QM=1.0
Factor de forma
Límites típicos
0.95<i<1.05
Los cálculos realizados muestran que i y fL afectan principalmente a la deriva y al
alcance, siendo los efectos de QM y QD menos destacables. Los efectos son que cuando
fL aumenta, el alcance y la deriva aumentan; cuando i disminuye, el alcance y la deriva
aumentan; cuando QM aumenta, el alcance disminuye y la deriva crece; y cuando QD
crece, el alcance y la deriva disminuyen. El alcance viene afectado fundamentalmente
por i mientras que la deriva viene afectada principalmente por fL; no obstante, todos los
parámetros se encuentran acoplados por lo que un análisis detallado requiere un proceso
iterativo.
El tiempo de vuelo computado t puede necesitar una corrección para cada carga, que
viene dada por:
T = t + a0 + a1 ⋅ t + a2 ⋅ t 2 + a3 ⋅ t 3
siendo T el tiempo de vuelo.
VI.-13
4. Términos adicionales para proyectiles base burn método 1
Este apartado proporciona las ecuaciones requeridas para simular el vuelo de proyectiles
base burn, empleando el método 1.
El cambio en aceleración, debida a la reducción de resistencia de base de un motor base
burn BB& , durante la fase de quemado ( t DI ≤ t y m ≥ mB , siendo tDI el tiempo de retraso
a la ignición del motor base burn y mB la masa del proyectil al finalizar el quemado del
propulsante), se adiciona a la ecuación del movimiento del centro de masas del proyectil
r
r
F = mu&& :
⎡⎛ π ⎞
⎤
2
2
⎢ ⎜ 8 ⎟ ⋅ ρ ⋅ d ⋅ v ⋅ C xBB ⋅ f (I ) ⋅ f (iBB , MT ) ⎥⎛ vr ⋅ cos α
r ⎞
e
⎥⎜
BB& = ⎢ ⎝ ⎠
+ αe ⎟
m
v
⎠
⎢
⎥⎝
⎢⎣
⎥⎦
El coeficiente CxBB es el coeficiente de reducción de resistencia durante la fase de
quemado. Se conceptúa como cualquier otro coeficiente aerodinámico; los valores de
estos coeficientes vienen dados por funciones polinómicas de orden cuatro (o inferior)
del número de Mach.
La función de variación del flujo del motor base burn viene dada por:
f (I ) = I I 0 si I ≤ I 0
f (I ) = 1 si I ≥ I 0
donde I es el parámetro de inyección de propulsante en el motor base burn
I=
4 ⋅ m& f
π ⋅ d b2 ⋅ ρ ⋅ v
VI.-14
donde m& f es la derivada de la masa de propulsante del motor y db el diámetro de la base
del proyectil. I0 es el parámetro de inyección de eficiencia óptima del motor base burn,
que es función del número de Mach y que se puede tomar como un polinomio de un
grado o inferior. Se define sobre regiones de números de Mach, desde M MAX i−1 hasta
M MAX i inclusive.
El coeficiente iBB es un factor de ajuste que se utiliza para ajustar la reducción de
resistencia y que se expresa como una función polinómica del ángulo de tiro, QE, de
tercer grado o inferior. De este modo, la función f(iBB,MT) se denomina factor base burn
y depende del ángulo de tiro QE y de la temperatura de propulsante del motor MT, para
cada carga.
iBB( MT = 21) = a0 + a1 ⋅ (QE ) + a2 ⋅ (QE ) + a3 ⋅ (QE )
2
3
y
f (iBB , MT ) = iBB( MT =21) + b1 ⋅ (MT − 21) + b2 ⋅ (MT − 21) + b3 ⋅ (MT − 21)
2
3
La masa del proyectil viene dada por:
para 0 ≤ t < t L (tL es el tiempo de salida del proyectil por la boca del arma)
m = m0 − mCB0
siendo m0 la masa inicial del proyectil y mCB0 la masa de propulsante del motor
quemada en el tubo.
Para t DI ≤ t y m ≥ mB
m& = −m& f
VI.-15
m& = −VC ⋅ ρ p ⋅ SC (mCB )
donde
mB = m0 − m f
mCB = m0 − m
siendo mCB la masa de propulsante quemada en el motor.
VC es la velocidad de combustión del propulsante base burn, ρ p la densidad del
propulsante del motor base burn y SC(mCB) el área de combustión del propulsante base
burn en el tiempo t, que se expresará en la forma de una función de la masa de
propulsante quemado:
SC = ai + bi ⋅ mCB
mCBi < mCB ≤ mCBi+1
donde ai y bi se definen sobre regiones de mCB, desde mCBi=0 hasta mCBi=n inclusive. La
velocidad de combustión viene dada por:
VC = VC0 ⋅ f (MT ) ⋅ g (P ) ⋅ K ( p )
siendo VC0 la velocidad de combustión obtenida en la rama del quemador a presión y
temperatura estándar.
f (MT ) = e β ( MT − 21)
g (P ) = k ⋅ P n
VI.-16
P es la presión del aire atmosférico local y p la velocidad de rotación axial del proyectil.
K(p) se denomina factor de quemado con la velocidad de rotación axial del proyectil y
se determina de experimentos, para tener en cuenta la influencia de la velocidad de
rotación axial en la velocidad de combustión, y se considera como una función lineal de
p para cada carga. El tiempo de extinción del motor base burn tB, es el tiempo para el
que m=mB.
La localización del centro de masas del proyectil viene dada por
X CG = X CG0 +
(X
CG0
)
− X CGB (m − m0 )
(m0 − mB )
siendo X CG0 la distancia inicial del centro de masas a la ojiva y X CGB la distancia del
centro de masas a la ojiva al finalizar el quemado del propulsante.
El momento de inercia axial del proyectil viene dado por
I X = I X0 +
(I
X0
)
− I X B (m − m0 )
(m0 − mB )
siendo I X 0 el momento de inercia axial inicial y I X B el momento de inercia axial al
finalizar el quemado del propulsante.
El coeficiente de momento de giro del proyectil viene dado por
CM α = CM* α +
(X
CG
)(
− X CG0 C D0 + C Lα
)
d
siendo C M* α el coeficiente de momento de giro inicial del proyectil.
Para compensar la aproximación por los términos adicionales usados en proyectiles base
burn se aplican ciertos factores de ajuste en orden a crear correspondencia entre los
VI.-17
resultados obtenidos computacionalmente y las experiencias observadas:
Parámetro
Símbolo
Tiempo de retraso a la
tDI
ignición del motor base burn
Factor de quemado con la
K(p)
velocidad de rotación axial
Factor base burn
f(iBB,MT)
Unidad
Límites típicos
s
-
-
-
-
-
El alcance viene afectado por los tres parámetros anteriores; el alcance disminuye al
aumentar tDI, al aumentar K(p) o/y al disminuir f(iBB,MT), aunque la contribución más
importante es esta última por lo que puede decirse que el alcance viene afectado
fundamentalmente por el factor base burn. La deriva es muy poco sensible a tDI (aunque
disminuye al aumentar tDI) disminuyendo al aumentar K(p) o/y al disminuir f(iBB,MT).
De cualquier forma, numéricamente, todos los parámetros se encuentran acoplados.
Dado que K(p) depende de cada carga, es necesario disponer de un factor de ajuste que
sea capaz de ajustar la deriva para cada ángulo de tiro. El STANAG 4355 indica que i
debe considerarse la unidad mientras que fL se utilizará para ajustar la deriva, siendo QM
y QD parámetros constantes.
El tiempo de extinción del motor base burn tB será un valor muy útil en el futuro, por lo
que es necesario conocer su evolución con los factores de ajuste. Si K(p) aumenta,
disminuye el tiempo extinción del motor siendo ésta la contribución más importante. Si
f(iBB,MT) aumenta, disminuye tB, pero de manera imperceptible. Si tDI aumenta, tB crece
prácticamente como una traslación y si fL aumenta, tB crece pero sin percepción
aparente.
El tiempo de retraso a la ignición del motor base burn tDI viene dado como una función
de la temperatura de propulsante del motor, para cada carga.
t DI = a0 + a1 ⋅ (MT − 21) + a2 ⋅ (MT − 21) + a3 ⋅ (MT − 21)
2
VI.-18
3
5. Términos adicionales para proyectiles base burn método 2
Este apartado proporciona las ecuaciones requeridas para simular el vuelo de proyectiles
base burn, empleando el método 2.
r
La reducción de resistencia de base, debida al motor base burn D , durante la fase de
quemado ( t DI ≤ t ≤ t B , siendo tDI el tiempo de retraso a la ignición del motor base burn y
tB el tiempo de apagado del motor), se adiciona a la ecuación del movimiento del centro
r
r
de masas del proyectil F = mu&& (obsérvese que se ha incluido la aceleración debida a la
fuerza de resistencia):
⎛
⎡
⎤
⎜
⎛ δBP ⎞
⎢
⎥
I
⎜
⎟
r
⎛ π ⋅ ρ ⋅ i ⋅ d 2 ⎞⎜
δI ⎠
⎢
⎥
⎝
⎟⎟⎜ C D0 − f (iBB , MT )⎢
+ C D 2 QD ⋅ α e2
D = −⎜⎜
2⎥
α
8m
⎝
⎠⎜
⎢ ⎛⎜ γ ⎞⎟ ⋅ M 2 ⋅ ⎛⎜ d ⎞⎟ ⎥
⎜
⎜d ⎟ ⎥
⎢⎣ ⎝ 2 ⎠
⎝ b⎠ ⎦
⎝
(
⎞
⎟
⎟ r
⎟vv
⎟
⎟
⎠
)
donde I es el parámetro de inyección de propulsante en el motor base burn
I=
4 ⋅ m& f
π ⋅ d b2 ⋅ ρ ⋅ v
donde m& f es la derivada de la masa de propulsante del motor y db el diámetro del
proyectil en su base.
⎡
⎛ δBP ⎞
⎢
I⎜
⎟
⎢
⎝ δI ⎠
f (i BB , MT )⎢
⎢ ⎛ γ ⎞ ⋅ M 2 ⋅ ⎛⎜ d
⎜d
⎢ ⎜⎝ 2 ⎟⎠
⎝ b
⎣
⎤
⎥
⎥
2 ⎥
⎞ ⎥
⎟⎟
⎥
⎠ ⎦
se usa para representar la reducción de resistencia debido al flujo de masa ( m& f ) del
motor base burn. El factor f(iΒΒ,MT) se denomina factor base burn, que depende del
ángulo de tiro QE y de la temperatura de propulsante del motor MT, para cada carga.
VI.-19
iBB( MT = 21) = a0 + a1 ⋅ (QE ) + a2 ⋅ (QE ) + a3 ⋅ (QE )
2
3
y
f (iBB , MT ) = iBB( MT =21) + b1 ⋅ (MT − 21) + b2 ⋅ (MT − 21) + b3 ⋅ (MT − 21)
2
3
δBP δI es el cambio en la presión de base adimensional para cambios en el parámetro
de inyección de propulsante en el motor base burn, como una función del número de
Mach y del parámetro de inyección.
La derivada δBP δI viene dada para diferentes valores de I, como una función del
número de Mach en la forma de polinomios de cuarto grado o inferior. Se definen sobre
regiones de números de Mach, desde M MAX i−1 hasta M MAX i inclusive.
⎛ δBP ⎞
2
3
4
⎜
⎟ = a0 + a1 ⋅ M + a2 ⋅ M + a3 ⋅ M + a4 ⋅ M
⎝ δI ⎠ I
La masa del proyectil viene dada por:
En t=0
m = m0
m& = 0
siendo m0 la masa inicial del proyectil.
para 0 < t < t DI (tDI es el tiempo de retraso a la ignición del motor)
m& = −
mDI
t DI
siendo mDI la masa de retraso a la ignición.
VI.-20
para t DI ≤ t < t B (tB es el tiempo de apagado del motor)
m& = − m& f
⎛ t B* − t (*t ) ⎞ *
⎟ ⋅ m&
m& f = ⎜
⎜ tB − t ⎟ f
⎝ (t )
⎠
siendo t B* el tiempo de referencia de apagado del motor, t(*t ) el pseudotiempo de
quemado del motor y m& *f la derivada de referencia de la masa de propulsante del motor
como función del pseudotiempo de quemado del motor t*. Esta última viene dada como
m& *f = a0 + a1 ⋅ ti* + a2 ⋅ t i*2 ; para t i* < t * ≤ t i*+1
siendo a0, a1 y a2 definidas sobre regiones de t*, desde t i*=0 hasta t i*=n inclusive.
t&(*t ) =
(
t B* − t(*t )
t B(t ) − t
)
⎡
⎛ P& ⎞⎤
⎛ p& ⎞
t&B(t ) = t B(t ) − t ⎢ f BTp ⎜⎜ ⎟⎟ + f BTP ⎜⎜ ⎟⎟⎥
⎝ p⎠
⎝ P ⎠⎦
⎣
siendo P la presión del aire atmosférico local, p la velocidad de rotación axial del
proyectil, fBTp el factor del tiempo de quemado de la velocidad de rotación axial del
proyectil base burn y fBTP el factor del tiempo de quemado de la presión del aire
atmosférico local del proyectil base burn. Estos dos últimos factores vienen dados como
constantes para cada carga.
ΔP ΔP
P& =
=
u2
Δt ΔE2
VI.-21
y en tDI
*
t(*t DI ) = t DI
t B(t
DI
)
= t DI
f BTp
f BT
⎡
⎛ p(t DI ) ⎞ ⎛ P(t DI ) ⎞ P ⎤
⎟⎟ ⎜⎜
⎟⎟ ⎥
+ ⎢(t B − t DI )⎜⎜
⎢⎣
⎝ pr ⎠ ⎝ Pr ⎠ ⎥⎦
*
el tiempo de referencia de retraso a la ignición del motor, Pr la presión de
siendo t DI
referencia del aire atmosférico local, pr la velocidad de rotación axial del proyectil de
referencia.
Para t ≥ t B
m = m0 − mDI − m f
m& = 0
con mf la masa de propulsante del proyectil. Cuando t = tB se corresponde con el instante
en que finaliza el quemado del propulsante en la unidad base burn.
La localización del centro de masas del proyectil viene dada por
X CG = X CG0 +
(X
CG0
)
− X CGB (m − m0 )
(m0 − mB )
siendo X CG0 la distancia inicial del centro de masas a la ojiva, X CGB la distancia del
centro de masas a la ojiva al finalizar el quemado del propulsante y mB la masa del
proyectil al finalizar el quemado del propulsante.
mB = m0 − mDI − m f
El momento de inercia axial del proyectil viene dado por
VI.-22
I X = I X0 +
(I
X0
)
− I X B (m − m0 )
(m0 − mB )
siendo I X 0 el momento de inercia axial inicial y I X B el momento de inercia axial al
finalizar el quemado del propulsante.
El coeficiente de momento de giro del proyectil viene dado por
CM α = CM* α +
(X
CG
)(
− X CG0 C D0 + C Lα
)
d
siendo C M* α el coeficiente de momento de giro inicial del proyectil.
El coeficiente cúbico del momento de giro del proyectil viene dado por
CM 3 = CM* 3 +
α
siendo C M*
α3
(X
CG
)(
− X CG0 C L 3 + C D 2 − 1 2 ⋅ C Lα
α
α
)
d
α
el coeficiente cúbico de momento de giro inicial del proyectil.
Para compensar la aproximación por los términos adicionales usados en proyectiles base
burn, se aplican ciertos factores de ajuste, en orden a crear correspondencia entre los
resultados obtenidos computacionalmente y las experiencias observadas:
Parámetro
Símbolo
Factor del tiempo de quemado de la velocidad
fBTp
de rotación axial del proyectil base burn
Factor del tiempo de quemado de la presión del
fBTP
aire atmosférico local del proyectil base burn
Factor base burn
f(iBB,MT)
Unidad
Límites típicos
-
− 0.5 < f BTp < −0.1
-
− 0.9 < f BTP < −0.5
-
0.9<f(iBB,MT)<1.1
El alcance viene afectado por los tres parámetros anteriores; el alcance disminuye al
disminuir f(iBB,MT), fBTP o/y fBTp. La principal contribución es la correspondiente al
VI.-23
primer término, siendo el peso del término debido a la presión superior al de rotación.
La deriva es muy poco sensible a estos tres parámetros siendo el comportamiento el de
reducirse al disminuir cualquiera de los tres parámetros; no obstante, numéricamente
todos los parámetros se encuentran acoplados.
El STANAG 4355 indica que i debe considerarse la unidad mientras que fL se utilizará
para ajustar la deriva, siendo QM y QD parámetros constantes.
El tiempo de extinción del motor base burn tBOFF será un elemento muy útil en el
desarrollo posterior, por lo que es preciso conocer su comportamiento con los factores
de ajuste. Si f(iBB,MT) aumenta, tBOFF aumenta pero de manera imperceptible. Si fBTP o/y
fBTp disminuyen, tBOFF aumenta, siendo el efecto debido a la presión muy importante y el
de rotación algo más débil. Si fL aumenta, tBOFF crece pero sin percepción aparente.
El tiempo de retraso a la ignición del motor base burn tDI así como la duración del motor
base burn tB - tDI vienen dadas como funciones de la temperatura de propulsante del
motor, para cada carga.
t DI = a0 + a1 ⋅ (MT − 21) + a2 ⋅ (MT − 21) + a3 ⋅ (MT − 21)
2
3
(t B − t DI ) = a0 + a1 ⋅ (MT − 21) + a2 ⋅ (MT − 21)2 + a3 ⋅ (MT − 21)3
Los mecanismos de reducción de resistencia de base para proyectiles base burn se deben
a los trabajos desarrollados por Gunners, Andersson y Hellgren (1988); así como por
Danberg (1990). Importantes avances realizados con el proyectil M864 US CBL/DUP
BB2 se mostraron en el 13º Simposio Internacional de Balística celebrado en Estocolmo
en 1992. En esos trabajos, se asume como hipótesis de trabajo que la inyección de masa
cerca de la estela solo afecta a la distribución de presión en la base del proyectil y por
tanto solo a la resistencia de base. La resistencia debida a la distribución de presión en
la zona de la ojiva del proyectil así como la debida a la resistencia viscosa no resultan
afectadas. De esta forma, el coeficiente de resistencia de un proyectil base burn puede
considerarse igual al coeficiente de resistencia de un proyectil con la unidad base burn
VI.-24
desactivada C D0 , menos la diferencia en la componente de resistencia de base ΔC D0bb
entre un motor inerte y un motor con la unidad base burn activa.
C D0bb = C D0 − ΔC D0bb
(
))
r
⎛π ⋅ ρ ⋅i ⋅ d 2 ⎞
r
⎟⎟ C D0 + C D 2 QD ⋅ α e2 vv
D = −⎜⎜
bb
α
8m
⎠
⎝
(
La componente de resistencia de base de un proyectil ΔC Db viene relacionada
directamente con la presión promedio en la base del proyectil Pb:
Pb
P
=
2
⎛γ ⎞
2 ⎛ d ⎞
⎜ ⎟ ⋅ M ⋅ ⎜⎜ ⎟⎟
⎝2⎠
⎝ db ⎠
1−
C Db
donde P es la presión del aire atmosférico local y γ la relación de calores específicos.
De esta relación, la diferencia teórica en la componente de resistencia de base para un
proyectil con un motor base burn inerte (presión de base promedio Pbi ) y un motor base
burn activo (presión de base promedio Pbb ), puede escribirse como:
Pbb
ΔC D0 =
bb
−
P
Pbi
P
2
⎛γ ⎞
2 ⎛ d ⎞
⎜ ⎟ ⋅ M ⋅ ⎜⎜ ⎟⎟
⎝2⎠
⎝ db ⎠
Rellamando
ΔBP =
Pbb
P
−
VI.-25
Pbi
P
A través de ensayos en túnel de viento, Danberg (1990) mostró que ΔBP es una
función lineal del parámetro de inyección de propulsante en el motor base burn I para
valores de I < 0.005 , M < 2.5 y temperaturas del orden de 300 K.
(
)
⎡ δ Pbb P ⎤
ΔBP = I ⎢
⎥
⎣ δI ⎦ I = 0
[(
) ]
Los ensayos en el túnel de viento encontraron que la pendiente δ Pbb P δI
I =0
únicamente depende del número de Mach de la corriente libre.
Integrando numéricamente las ecuaciones de Navier Stokes, proceso conocido
abreviadamente como CFD (Computational Fluid Dynamics), Nietubicz y Sahu (1988)
confirmaron los resultados para temperaturas del orden de 300 K y obtuvieron datos
para temperaturas usuales de combustión del propulsante del motor base burn. Estos
investigadores analizaron el flujo de un proyectil M864 US CBL/DUP BB2 para un
amplio espectro de flujos de masas de inyección y de temperaturas. Estos estudios
fueron mostrados en el 1º Simposio Internacional en Propulsión Química celebrado en
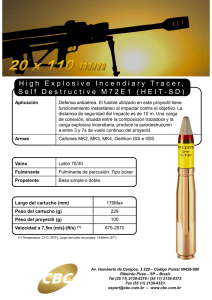
Grecia en 1989. La siguiente figura muestra el cambio en la presión de base promedio
en función del parámetro de inyección de propulsante para diferentes números de Mach.
Estos datos corresponden a una temperatura de remanso de gas inyectado de 1500 K.
VI.-26
De la figura anterior se desprende que esas curvas pueden ser representadas por una
línea que pasa por el origen con una pendiente que se incrementa con el número de
Mach para I < 0.002 . Esta pendiente se ha representado en la siguiente figura para una
serie de números de Mach y temperaturas de inyección del gas. Con los puntos
obtenidos mediante CFD, se ha ajustado un polinomio cúbico del número de Mach,
cuyos coeficientes son funciones lineales de la temperatura de inyección del gas (para I
< 0.002).
VI.-27
Para parámetros de inyección de propulsante en el motor superiores, la diferencia de
presión en la base no es lineal con I. Sin embargo, ΔBP se puede representar en
términos de una nueva variable
⎛ δBP ⎞
ΔBP = I ⎜
⎟
⎝ δI ⎠
Para parámetros de inyección de propulsante en el motor bajos y temperatura fija del
gas, δBP δI se aproxima al límite mostrado en la figura anterior. Para valores de I más
altos, se produce una disminución de δBP δI como puede observarse en la figura
siguiente:
VI.-28
6. Movimiento del proyectil referido al centro de gravedad
El movimiento del centro de gravedad del proyectil se representa en la siguiente figura.
El sistema X Y Z es fijo y ligado a tierra en el origen de la trayectoria. El eje X es la
intersección del plano de tiro con el plano horizontal, el eje Y tiene la dirección de la
vertical y el eje Z se elige de manera que forme con los otros dos un triedro
trirrectángulo dextrórsum. El plano horizontal está determinado por los ejes X Z, en
tanto que el plano de tiro está definido por los ejes X Y.
El punto G es el centro de gravedad del proyectil. La trayectoria es alabeada y su
proyección sobre el plano horizontal es la línea OG1, siendo G1 la proyección del centro
de gravedad. En el punto G se ha representado el triedro x´ y´ z´. El eje x´ tiene la
dirección de la tangente a la trayectoria y sentido el de la velocidad del proyectil. El eje
y´ es perpendicular a x´, y está contenido en el plano vertical, siendo su sentido hacia
arriba. El eje z´ forma con los otros dos un triedro trirrectángulo dextrórsum. Sobre el
plano horizontal se han representado las proyecciones de los ejes x´ y z´, que son,
respectivamente, los ejes x1′ y z1′ .
La siguiente figura representa el movimiento del eje del proyectil en torno a su centro
de gravedad. El sistema x y z, ligado al centro de gravedad, tiene el eje x en la dirección
del eje del proyectil y sentido hacia la punta del mismo. Los otros dos ejes son
cualesquiera con tal de que formen con el eje x un sistema trirrectángulo dextrórsum.
VI.-29
Los vectores unitarios correspondientes al sistema x´ y´ z´ son {I, J, K} y los
correspondientes al sistema x y z son {x, y, z}. El vector unitario x se toma de forma
que su origen esté sobre el centro de gravedad y su extremo coincida con la punta del
proyectil. El plano π es perpendicular al eje x´ por el extremo del vector I. Suponiendo
que el ángulo de ataque, α, es pequeño, la punta del vector x se puede considerar sobre
el plano π. El vector a = x-I se denomina vector de ataque y su movimiento describe el
movimiento del eje del proyectil en torno a su centro de gravedad. Los ejes u y v sobre
el plano π, paralelos a los ejes x´ y z´, serán considerados, respectivamente como ejes
real e imaginario para la representación del vector de ataque sobre el plano π.
En los trabajos desarrollados por Cucharero (1992) puede verse en detalle el
movimiento del proyectil referido al centro de gravedad y la aplicación del teorema del
momento cinético.
Obsérvese el sistema de ecuaciones que expresan el movimiento general del eje del
proyectil en torno a su centro de gravedad.
ω& = −Γω
⎡ ⎛I
⎤
⎞
⎡μ
⎤
I
I
&a& − ⎢iω ⎜ x + λ ⎟ − (h + χ )⎥ ⋅ a& − ⎢ + i x ω (χ − λ ) + λ x ω 2 − h(χ − iλω )⎥ ⋅ a =
⎟
⎜
Iy
Iy
⎢⎣ ⎝ I y
⎥⎦
⎠
⎣⎢ I y
⎦⎥
⎛
I ⎞ g ⋅ cosθ ⎛ g ⋅ cosθ ⎞
+⎜
= ⎜h − i x ω⎟
⎟
⎟
⎜
I
v
v
⎝
⎠
y
⎠
⎝
VI.-30
Introduciendo un cambio de notación a efectos de simplificación:
⎡
⎤
⎞
+ λ ⎟ − (h + χ )⎥
⎟
⎝ Iy
⎠
⎦⎥
⎛ Ix
α = − ⎢iω ⎜⎜
⎣⎢
⎡μ
β = −⎢
⎣⎢ I y
+i
⎛
⎤
Ix
I
ω (χ − λ ) + λ x ω 2 − h(χ − iλω )⎥
Iy
Iy
⎦⎥
I
⎞ g ⋅ cosθ
δ = ⎜⎜ h − i x ω ⎟⎟
Iy
⎝
⎠
v
⎛ g ⋅ cosθ ⎞
+⎜
⎟
v
⎠
⎝
queda
&a& + α ⋅ a& + β ⋅ a = δ
Si &a& = 0 se obtiene el Modelo Modificado de Masa Puntual Dinámico. Si &a& = 0 y a& = 0
se obtiene el Modelo Modificado de Masa Puntual Estático tal como aparece en el
STANAG 4355 y si &a& = 0 , a& = 0 y a = 0 se obtiene el Modelo de Masa Puntual.
En la aproximación efectuada en el Modelo Modificado de Masa Puntual Estático se ha
supuesto que el vector de ataque es prácticamente constante durante el movimiento. Eso
es cierto en la mayor parte de la trayectoria; sin embargo, en el momento del disparo, el
proyectil avanza guiado por el ánima con ángulo de ataque nulo, y en el instante de
abandonar el arma, el proyectil es sometido a perturbaciones locales que producen un
ángulo de ataque inicial dando como resultado el fenómeno de reelevación
aerodinámica. Este fenómeno es un efecto muy débil, consecuencia del movimiento de
nutación del proyectil y que desaparece cuando la nutación se amortigua (Cucharero,
1992).
Otra zona a tener en cuenta es el vértice de la trayectoria. La componente del peso que
equilibra la sustentación aumenta en la rama ascendente y disminuye en la rama
VI.-31
descendente, con lo que el ángulo de ataque crece en la rama ascendente y disminuye en
la rama descendente sufriendo una variación brusca en la zona del vértice.
En resumen, la aproximación efectuada en el Modelo Modificado de Masa Puntual
Estático es valida, excepto en zonas donde el ángulo de ataque puede variar fuertemente
como el momento del disparo y el vértice de la trayectoria.
Realizando un análisis de órdenes de magnitud entre el término en derivada primera y el
término en vector de ataque, se tiene que si el vector de ataque sufre variaciones del
orden de él mismo en un tiempo característico tc
α⋅
ac
≈ β ⋅ ac
tc
Si el tiempo característico en el que el vector de ataque sufre variaciones es muy grande,
los términos en derivadas desaparecen y se tiene el Modelo Modificado de Masa
Puntual Estático; pero si este tiempo es tan pequeño como t c ≈ α β , la aproximación
del Modelo Modificado de Masa Puntual Estático no es válida y es necesario retener los
términos en derivadas.
El Modelo Modificado de Masa Puntual Estático es válido en la mayor parte de la
trayectoria, excepto en el instante inicial y en el vértice de la trayectoria donde el vector
de ataque sufre variaciones importantes en tiempos pequeños, dando lugar a saltos en
escalón ya que las derivadas que suavizan estas zonas han sido eliminadas.
Este fenómeno podrá observarse posteriormente en los resultados experimentales
obtenidos.
VI.-32
7. Vector de ataque
Partiendo de las ecuaciones que describen el vuelo de un proyectil, según aparecen en el
STANAG 4355, se van a obtener unas expresiones simples del vector de ataque
proyectado sobre el plano π en ejes u y v. Considerando las dos últimas figuras y
obteniendo los vectores unitarios, correspondientes a los vectores u y v, respecto al
sistema de referencia ligado a tierra, las proyecciones del vector de ataque sobre estos
dos versores permiten obtener la representación del vector de ataque en el plano π.
En el plano vertical formado por x1´ e Y se puede observar que, como el eje u es
paralelo al eje y´, el vector u puede expresarse como combinación lineal de los vectores
(0,1,0), en el sistema X Y Z, y el vector velocidad. El vector velocidad se va a designar
como vel en este apartado, para diferenciarlo del vector v.
r
u = λ1 ⋅ (0,1,0) + λ2 ⋅ vel
r
y como u ⋅ vel = 0 , se tiene un sistema de ecuaciones que proporciona u:
λ1 = −λ2 ⋅
velx2 + vel y2 + vel z2
vel y
⎞
⎛ vel 2 + vel z2 ⎞
r ⎛
⎟, vel z ⎟
u ≡ ⎜ vel x ,−⎜ x
⎟
⎜
⎜
⎟
vel y
⎠
⎝
⎝
⎠
El vector v se obtiene de
r
r
v = vel ∧ u
Dividiendo cada uno de estos vectores, u y v, por su módulo, se obtienen finalmente los
versores correspondientes a los vectores u y v.
VI.-33
8. Cálculo numérico
Para la integración del sistema de ecuaciones diferenciales, se han generado una serie de
aplicaciones informáticas de cálculo en lenguaje C++, empleando un compilador
Microsoft Visual Studio.NET. Las gráficas se construirán utilizando MATLAB R2006a.
El proyecto se inicializa abriendo una serie de ficheros de textos, desde donde se lee
toda la información necesaria para efectuar los cálculos. Estos ficheros presentan
algunas diferencias entre el método 1 y el método 2, por lo que a continuación se
mostraran ejemplos de estos ficheros, volcados de los propios ficheros de texto, para un
proyectil calculado por el método 1 y para otro proyectil calculado por el método 2.
8.1. Datos aerodinámicos
Fichero de datos aerodinámicos, denominado aerodinamica.txt, que presenta la misma
estructura para el proyectil base burn método 1 y método 2.
Símbolo
CD0
CDα2
CLα
CLα3
CMα
CMα3
Cmag-f
Cspin
Descripción
Coeficiente de la fuerza de resistencia
para ángulo de ataque cero
Coeficiente cuadrático de la fuerza de
resistencia
Coeficiente de la fuerza de
sustentación
Coeficiente cúbico de la fuerza de
sustentación
Coeficiente del momento de giro
Texto
Coeficiente cúbico del momento de
giro
Coeficiente de la fuerza Magnus
CMA3
Coeficiente
del
momento
amortiguamiento de rotación
CSPIN
de
CD0
CDA2
CLA
CLA3
CMA
CMAG
Los coeficientes aerodinámicos son adimensionales y vienen dados como función del
número de Mach. Estas funciones aparecen en la forma de polinomios consecutivos de
cuarto grado o inferior, definidos sobre regiones de números de Mach, desde M MAX i−1
VI.-34
hasta M MAX inclusive. Cada coeficiente aerodinámico se describe como polinomios de
la forma:
Ci = a0 + a1 ⋅ M + a2 ⋅ M 2 + a3 ⋅ M 3 + a4 ⋅ M 4
para diferentes intervalos de número de Mach, que deben introducirse con el siguiente
formato para cada coeficiente
Ci
Mmin (el número de Mach debe darse en orden ascendente)
Mach(1)
a0(1)
a1(1)
a2(1)
a3(1)
a4(1)
.....
.....
Mach(n)
a0(n)
a1(n)
a2(n)
a3(n)
a4(n)
Los polinomios deben ser continuos al cruzar los intervalos y los números de Mach
deben incrementarse de un intervalo al siguiente. El número de Mach inferior del primer
intervalo es opcional y cuando no figura, la aplicación lo asume como cero. El número
de Mach superior del último intervalo debe ser más alto que el número de Mach
correspondiente a la velocidad inicial máxima. Las relaciones de continuidad para el
primer y el segundo intervalo pueden expresarse como
1) Mmax,1 < Mmax,2
2) a0,1 + a1,1Mmax,1 + a2,1M2max,1 + a3,1M3max,1 + a4,1M4max,1 =
a0,2 + a1,2Mmax,1 + a2,2M2max,1 + a3,2M3max,1 + a4,2M4max,1
Estas relaciones son similares para el segundo y siguientes intervalos. A modo de
ejemplo, el coeficiente CLα con dos intervalos debe escribirse como:
CLA Mmin
Mmax,1 a0,1
Mmax,2 a0,2
a1,1
a1,2
a2,1
a2,2
a3,1
a3,2
a4,1
a4,2
Obsérvese que aunque los polinomios deben ser continuos al cruzar los intervalos, no se
exige que la derivada sea continua.
Esta estructura comentada aquí, se repetirá sucesivamente para otros parámetros y
coeficientes, y es fundamental para acometer el cálculo con proyectiles base burn.
VI.-35
Símbolo
K(p)
mCB0
mf
ρp
SC
tDI
VC
XCG0
XCGB
Texto
CXBB
Descripción
Factor de quemado con la
velocidad de rotación axial
Masa de propulsante del
motor quemada en el tubo
Masa de propulsante del
motor
Densidad del propulsante
del motor base burn
Área de combustión del
propulsante base burn
Tiempo de retraso a la
ignición del motor base
burn
Velocidad de combustión
del propulsante base burn
Distancia inicial del centro
de masas a la ojiva
Distancia del centro de
masas a la ojiva al finalizar
el quemado del propulsante
Texto
KP
Unidad
-
MCB0
kg
MFUEL
kg
RHOP
kg/m3
SC
m2
TDI
s
VC
m/s
XCG0
m
XCGB
m
Dependencia
carga, p
carga
propulsante
quemado
MT, carga
MT, p,
presión
Nota
Polinomio función del número de Mach
a0 + a1M + a2M2 + a3M3 + a4M4
para diferentes intervalos del número de Mach. Los intervalos deben
introducirse en orden ascendente con el formato
FIBB
CXBB Mmin
Mmax
a0
a1
a2
a3
a4
Polinomio función de la temperatura de propulsante del motor y del ángulo de
tiro, para cada carga
a0 + a1QE + a2QE2 + a3QE3 + b1(MT-21) + b2(MT-21)2 + b3(MT-21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en °C)
y QE (ángulo de tiro en milésimas), para una carga dada. Los intervalos de
temperatura deben introducirse en orden ascendente con el formato
FIBB MTmin
MTmax a0
a1
a2
a3
VI.-38
b1
b2
b3
Texto
I0
Nota
Polinomio lineal función del número de Mach
a0 + a1M
para diferentes intervalos del número de Mach. Los intervalos deben
introducirse en orden ascendente con el formato
KP
I0 Mmin
Mmax
a0
a1
Polinomio lineal función de la velocidad de rotación axial del proyectil, para
cada carga
a0 + a1p
Donde p es la velocidad de rotación axial (rad/s). El formato es
MCB0
SC
KP
a0
a1
Es una constante para cada carga con el formato
MCB0
a
Polinomio lineal función de la masa de propulsante quemada en el motor
(mCB)
a0 + a1 mCB
para diferentes intervalos de mCB. Los intervalos deben introducirse en orden
ascendente con el formato
TDI
SC mCB,min
mCB,max
a0
a1
Polinomio función de la temperatura de propulsante del motor, para cada carga
a0 + a1 (MT - 21) + a2 (MT - 21)2 + a3 (MT - 21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en
°C), para una carga dada. Los intervalos de temperatura deben introducirse en
orden ascendente con el formato
VC
TDI MTmin
MTmax
a0
a1
a2
a3
La velocidad de combustión viene dada por
VC0eβ(MT-21) kPnK(p)
donde MT es la temperatura de propulsante del motor (°C), P es la presión
ambiente (Pascal) y p es velocidad de rotación axial del proyectil (rad/s). K(p)
tiene una entrada separada. El rango de temperaturas validas puede
introducirse con el formato
VC
VC0
β
k
n
MTmin
VI.-39
MTmax
Símbolo
∂BP
∂I
fBTP
fBTp
f(iΒΒ,MT)
IXB
mDI
m& *f
mf
Pr
pr
t B* , tBST
tB - tDI
tDI
*
t DI
, tDIST
XCG0
XCGB
Descripción
Cambio en la presión de base
adimensional para cambios
en el parámetro de inyección
de propulsante
Factor del tiempo de
quemado de la presión del
aire atmosférico
Factor del tiempo de
quemado de la velocidad de
rotación axial
Factor base burn
Texto
Momento de inercia axial al
finalizar el quemado del
propulsante
Masa de retraso a la
ignición.
Derivada de referencia de la
masa de propulsante del
motor
Masa de propulsante del
motor
Presión de referencia del aire
atmosférico local
Velocidad de rotación axial
de referencia
Tiempo de referencia de
apagado del motor
Duración del motor base
burn
Tiempo de retraso a la
ignición del motor base burn
Tiempo de referencia de
retraso a la ignición del
motor base burn
Distancia inicial del centro
de masas a la ojiva
Distancia del centro de
masas a la ojiva, al finalizar
el quemado del propulsante
VI.-41
DBPDI
Unidad
-
Dependencia
Mach,
parámetro de
inyección
FBTPRES
-
carga
FBTSPIN
-
carga
FIBB
-
MT, QE, carga
IXB
kgm2
MDI
kg
MFDOTST
kg/s
MFUEL
kg
PRESREF
Pa
SPINREF
rad/s
pseudotiempo
TBST
s
TBURN
s
MT, carga
TDI
s
MT, carga
TDIST
s
XCG0
m
XCGB
m
Texto
DBPDI
Nota
Polinomio función del número de Mach
a0 + a1M + a2M2 + a3M3 + a4M4
para diferentes intervalos del número de Mach y para un valor dado (b) del
parámetro de inyección de propulsante en el motor base burn (I). Los
números de Mach deben introducirse en orden ascendente con el formato
FBTPRES
DBPDI Mmin
I
b
a0
a1
a2
a3
a4
Mmax
Esta secuencia puede repetirse para diferentes valores del parámetro de
inyección de propulsante, que debe introducirse en orden ascendente.
Es una constante para cada carga, con el formato
FBTSPIN
FBTPRES
a
Es una constante para cada carga, con el formato
FIBB
FBTSPIN
a
Polinomio función de la temperatura de propulsante del motor y del ángulo
de tiro, para cada carga
a0 + a1QE + a2QE2 + a3QE3 + b1(MT-21) + b2(MT-21)2 + b3(MT-21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en
°C) y QE (ángulo de tiro en milésimas), para una carga dada. Los intervalos
de temperatura deben introducirse en orden ascendente con el formato
MFDOTST
FIBB MTmin
MTmax a0
a1
a2
a3
Polinomio función del pseudotiempo t*
b1
b2
b3
a0 + a1t* + a2t*2
para diferentes intervalos de t*. Los intervalos deben introducirse en orden
ascendente con el formato
TBURN
MFDOTST t*min
a1 a2
t*max a0
Polinomio función de la temperatura de propulsante del motor, para cada
carga
a0 + a1 (MT - 21) + a2 (MT - 21)2 + a3 (MT - 21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en
°C), para una carga dada. Los intervalos de temperatura deben introducirse en
orden ascendente con el formato
TBURN MTmin
MTmax
a0
a1
a2
VI.-42
a3
Texto
FL
Nota
Polinomio función del ángulo de tiro
a0 + a1M + a2M2 + a3M3 + a4M4
para diferentes intervalos de QE (ángulo de tiro en milésimas), para una carga
dada. Los intervalos de ángulo de tiro deben introducirse en orden ascendente
con el formato
IFORM
FL QEmin
a1
a2
a3
QEmax a0
Polinomio función del ángulo de tiro
a0 + a1M + a2M2 + a3M3 + a4M4
para diferentes intervalos de QE (ángulo de tiro en milésimas), para una carga
dada. Los intervalos de ángulo de tiro deben introducirse en orden ascendente
con el formato
IFORM QEmin
a1
QEmax a0
a2
a3
PROYECTIL OE155F2RTC FR HEA BB1
GUN 155AUF1
MADRID, MAYO DE 2005
CARGA DLE-CE-155F1/7 C7
FL
1599.0 1.0
IFORM
1599.0 1.0
QD 1.0
QM 1.0
PROYECTIL M864 US CBL/DUP BB2
GUN M198
MADRID, AGOSTO DE 2005
CARGA M232/5H CH5H
FL
1599.0 1.0087 0.0 0.0
IFORM
1599.0 1.0000 0.0 0.0
QD 1.2
QM 1.2
8.5. Datos varios
Fichero de datos, denominado canon.txt, que presenta la misma estructura para el
proyectil base burn método 1 y método 2.
VI.-46
Símbolo
u
Descripción
Velocidad en boca del arma
tc
Número de calibres de TWIST
longitud de tubo, recorridos
por cada revolución del
proyectil
Diámetro de referencia del D
proyectil
IX0
Momento de inercia axial
d
IX
m0
upT
t
Texto
MV
Masa del proyectil de MREF
referencia
incluida
la
espoleta (masa inicial)
Corrección de la velocidad DELUPT
en boca por temperatura de
propulsante de la carga
TCORR
Corrección del tiempo
Unidad
m/s
cal/rev
m
kgm2
kg
m/s
s
AZ
Temperatura de propulsante PT
de la carga
Temperatura de propulsante MT
del motor
ACIMUT
Acimut
mil
lat
Latitud del punto de disparo
LATITUD
deg
AltW
Altitud del arma sobre el
nivel del mar
Parámetro del proceso de
integración
Parámetro del proceso de
integración
ALTITUD
m
PT
MT
h
eRK
Texto
DELUPT
Dependencia
PT, carga
tiempo de
vuelo, carga
ºC
ºC
PASO
ERROR
Nota
Polinomio función de la temperatura del propulsante
a0 + a1 (PT - 21) + a2 (PT - 21)2 + a3 (PT - 21)3
para diferentes intervalos de PT (temperatura de propulsante de la carga en
°C), para una carga dada. Los intervalos de temperatura deben introducirse en
orden ascendente con el formato
DELUPT PTmin
PTmax a0 a1
a2
a3
VI.-47
8.6. Algoritmo de integración
La elección del algoritmo de integración numérica constituye una importante decisión
en cualquier problema de resolución de ecuaciones diferenciales. A la hora de tener en
cuenta la decisión final, cabe citar el siguiente párrafo del Numerical Recipes “…el
método Runge Kutta de cuarto orden no es sólo la primera palabra en esquemas de
integración para ecuaciones diferenciales ordinarias, si no que es la última también.
De hecho, usted puede ir bastante lejos con este viejo caballito de batalla,
especialmente si lo combina con un algoritmo de paso adaptativo…”.
La resolución del problema empleando un esquema de integración con paso adaptativo
ha representado un importante proceso de análisis e investigación para la consecución
de este trabajo. Dentro de los métodos Runge Kutta con paso adaptativo, un método
ampliamente estudiado es el ideado por Fehlberg, también conocido como Runge Kutta
45 o Runge Kutta Fehlberg. Existen varias variantes a este método aunque todas ellas
proporcionan un error de truncamiento del mismo orden.
Para el caso de una ecuación diferencial ordinaria, el método Fehlberg de cuarto orden
emplea las siguientes expresiones
y j +1 = y j +
25
1408
2197
1
k1 +
k3 +
k 4 − k5
216
2565
4104
5
siendo
k1 = h ⋅ f (t j , y j )
1
1 ⎞
⎛
k 2 = h ⋅ f ⎜ t j + h, y j + k1 ⎟
4
4 ⎠
⎝
3
3
9 ⎞
⎛
k3 = h ⋅ f ⎜ t j + h, y j + k1 + k 2 ⎟
8
32
32 ⎠
⎝
12
1932
7200
7296 ⎞
⎛
k 4 = h ⋅ f ⎜ t j + h, y j +
k1 −
k2 +
k3 ⎟
13
2197
2197
2197 ⎠
⎝
439
3680
845 ⎞
⎛
k5 = h ⋅ f ⎜ t j + h, y j +
k1 − 8k 2 +
k3 −
k4 ⎟
216
513
4104 ⎠
⎝
VI.-49
Este esquema requiere una evaluación más que el método clásico Runge Kutta de orden
cuatro. Otra evaluación permite obtener un método Runge Kutta de orden cinco
1
8
3544
1859
11 ⎞
⎛
k 6 = h ⋅ f ⎜ t j + h, y j − k1 + 2k 2 −
k3 +
k 4 − k5 ⎟
2
27
2565
4104
40 ⎠
⎝
z j +1 = y j +
16
6656
28561
9
2
k1 +
k3 +
k 4 − k5 + k 6
135
12825
56430
50
55
La diferencia entre yj+1 y zj+1 proporciona una estimación del error de truncación local
en el método de orden cuatro y permite ajustar el paso de tiempo.
Aunque este método implica un aumento del esfuerzo computacional, se espera
disminuir el tiempo de cálculo, aumentando el paso de integración en aquellas zonas
donde el comportamiento de la función así lo permita.
El modelo a resolver es un sistema de ecuaciones diferenciales. En el Modelo
Modificado de Masa Puntual se tienen siete ecuaciones; la que proporciona la
velocidad, la de posición, la de velocidad de rotación axial, y si se está aplicando el
método 1 para proyectiles base burn, la ecuación de variación de la masa. Para
proyectiles base burn empleando el método 2, se tiene la ecuación de variación de la
masa, la del pseudotiempo y la del tiempo de apagado del motor. En síntesis, para
proyectiles base burn método 1, un sistema de ocho ecuaciones diferenciales ordinarias
y para proyectiles base burn método 2, un sistema de diez ecuaciones diferenciales
ordinarias.
El problema a resolver es un sistema del tipo
y& 1 = f 1 (t , y 1 , y 2 ,..., y n )
y& 2 = f 2 (t , y1 , y 2 ,..., y n )
M
y& n = f n (t , y1 , y 2 ,..., y n )
VI.-50
Adoptando una concepción tensorial, se puede escribir
r r r
y& = f (t , y )
siendo
⎧ y1 ⎫
⎧ f 1⎫
⎪ ⎪
⎪ ⎪
r ⎪y2 ⎪ r ⎪ f 2 ⎪
y=⎨ ⎬ y f =⎨ ⎬
⎪M⎪
⎪ M ⎪
n
⎪⎩ y ⎪⎭
⎪⎩ f n ⎪⎭
Generalizando
r
r
25 r 1408 r 2197 r 1 r
y j +1 = y j +
k1 +
k3 +
k 4 − k5
216
2565
4104
5
16 r 6656 r 28561 r
9 r
2 r
r
v
z j +1 = y j +
k1 +
k3 +
k 4 − k5 + k 6
135
12825
56430
50
55
siendo
r
r r
k1 = h ⋅ f (t j , y j )
s
r⎛
1 r 1r⎞
k2 = h ⋅ f ⎜ t j + h, y j + k1 ⎟
4
4 ⎠
⎝
r
k3 = h ⋅
r⎛
3 r
3 r 9 r⎞
f ⎜ t j + h, y j + k1 + k2 ⎟
8
32
32 ⎠
⎝
r
r⎛
12 r 1932 r 7200 r 7296 r ⎞
k4 = h ⋅ f ⎜ t j + h, y j +
k1 −
k2 +
k3 ⎟
13
2197
2197
2197 ⎠
⎝
r
r⎛
r 3680 r
r 439 r
845 r ⎞
k5 = h ⋅ f ⎜ t j + h, y j +
k1 − 8k2 +
k3 −
k4 ⎟
216
513
4104 ⎠
⎝
r
r⎛
r 3544 r 1859 r 11 r ⎞
1 r
8 r
k6 = h ⋅ f ⎜ t j + h, y j − k1 + 2k2 −
k3 +
k 4 − k5 ⎟
2
27
2565
4104
40 ⎠
⎝
VI.-51
r
r
r
Dado un paso inicial h y un valor inicial y j , el algoritmo permite obtener y j +1 y z j +1 .
⎧ z1j +1 ⎫
⎧ y1j +1 ⎫
⎪ 2 ⎪
⎪ 2 ⎪
r
⎪ z j +1 ⎪
⎪ y j +1 ⎪ r
y j +1 = ⎨
⎬ z j +1 = ⎨ ⎬
⎪ M ⎪
⎪ M ⎪
⎪ z nj+1 ⎪
⎪ y nj+1 ⎪
⎭
⎩ ⎭
⎩
r
Calculando el vector e y definiendo la componente máxima de dicho vector em
(
(
)
)
(
)
⎧ z 1j +1 − y 1j +1 z 1j +1 ⎫
⎪ 2
⎪
2
2
r ⎪ z j +1 − y j +1 z j +1 ⎪
e =⎨
⎬
M
⎪
⎪
⎪ z nj+1 − y nj+1 z nj+1 ⎪
⎩
⎭
em = max{e1 , e 2 , L, e n }
Para el ajuste del paso de tiempo se han analizado dos estrategias. La primera de ellas
emplea la siguiente expresión, donde si para un paso h1 se produce un error Δ1 , para una
exactitud deseada Δ 0 se estima un paso de tiempo h0
Δ
h0 = h1 0
Δ1
α
con Δ1 = y j +1 − z j +1 y α = 0.2 cuando aumenta el tamaño de paso, y α = 0.25 cuando
disminuye. Los análisis efectuados empleando este método muestran que si Δ1 resulta
muy diferente a Δ 0 , el paso de tiempo nuevo es muy diferente con respecto al anterior
lo que puede llevar a fuertes variaciones en las variables, lo cual presenta un
comportamiento totalmente asimétrico de los resultados al pasar de un paso de tiempo al
siguiente. Este fenómeno aparece fuertemente en el inicio de la trayectoria. Esto ha
conducido a limitar el paso de tiempo entre un valor mínimo y un valor máximo.
Realmente, el límite más importante a imponer es el mínimo siendo el límite superior
VI.-52
más un valor de seguridad, dado que el propio método de ajuste del paso de tiempo
limita el crecimiento del propio paso de tiempo.
Considerando un parámetro de error eRK , se tiene
e
h0 = h1 RK
em
α
El paso de tiempo obtenido ha de quedar limitado entre dos valores hmin y hmax.
Para evaluar el método Fehlberg se ha recurrido a la resolución del mismo problema
empleando un método Runge Kutta de cuarto orden. El objetivo es obtener una
precisión del mismo orden con el método Fehlberg y el RK4, reduciendo de una manera
importante el tiempo de cálculo.
(
r
r r
r
r 1 r
y j +1 = y j + k1 + 2k 2 + 2k 3 + k 4
6
)
r
r r
k1 = h ⋅ f (t j , y j )
s
r⎛
1 r 1r⎞
k 2 = h ⋅ f ⎜ t j + h, y j + k1 ⎟
2
2 ⎠
⎝
r
r⎛
1 r 1r ⎞
k 3 = h ⋅ f ⎜ t j + h, y j + k 2 ⎟
2
2 ⎠
⎝
r
r
r r
k 4 = h ⋅ f t j + h, y j + k3
(
)
Inicialmente se resolvió el problema y& = y 2 , donde se comprobó que los métodos de
integración RK4 y RK45 proporcionaban un resultado ampliamente aceptable, para a
continuación acometer el problema balístico de los proyectiles base burn.
En la elección del paso mínimo debe tenerse en cuenta que cuanto más pequeño sea el
paso, mayor es el tiempo de cálculo de ordenador; si bien, este paso es el que permite
obtener buenas aproximaciones en situaciones de alta variabilidad como el vértice de la
trayectoria. La elección del paso de tiempo mínimo viene especificada por el criterio de
VI.-53
alcanzar precisiones del orden de decímetros en alcance y deriva, para alcances
máximos (del orden de treinta kilómetros).
Los análisis efectuados revelaron que con pasos de integración superiores a diez
segundos, los errores se hacían muy grandes aunque no se salía de la zona de estabilidad
del método. Se ha considerado un límite en el paso de integración máximo; sin
embargo, este valor solo es necesario por motivos de seguridad ya que el propio
parámetro de error eRK limita el crecimiento del paso de tiempo.
La investigación realizada utilizando el método RK45 ha permitido extraer que
inicialmente el método demanda un paso de tiempo muy pequeño, por lo que se ha
considerado como condición inicial para el paso de tiempo el más desfavorable, el paso
de tiempo mínimo ya que el propio método ajustará el paso de tiempo de acuerdo a
como se demande.
Empleando un ordenador Intel Pentium 4 a 3.00GHz, con 1016MB de memoria RAM; y
para el caso del proyectil base burn método 1, se ha computado una trayectoria balística
en diez segundos para alcances máximos, utilizando un algoritmo de integración RK4,
con un paso de integración h = 0.02 s; elegido apropiadamente para conseguir
precisiones del orden de decímetros. Realizando el mismo análisis con un algoritmo de
integración RK45, los parámetros eRK, hmin y hmax se ajustaran considerando como
patrón la deriva y el alcance, siendo el objetivo obtener precisiones del orden de
decímetros, para alcances máximos. En este supuesto, se ha computando una trayectoria
balística en 1.4 segundos con los siguientes valores:
hmin = 0.02 s
hmax = 6.0 s
eRK = 0.12
Estos tiempos son meramente estimativos a efectos de comparación, dado que el tiempo
de computación de una trayectoria individual incluye el tiempo de acceso a ficheros,
que en un cálculo masivo de trayectorias no se produciría. Es decir, en un cálculo
numeroso de trayectorias, el tiempo por trayectoria sería muy inferior a los valores
mostrados anteriormente.
VI.-54
Realizando el mismo análisis referido anteriormente, con un algoritmo de integración
RK45, para el proyectil base burn método 2, los parámetros eRK, hmin y hmax se ajustaran
considerando como patrón la deriva y el alcance, siendo el objetivo obtener precisiones
del orden de decímetros, para alcances máximos. Se ha computando una trayectoria
balística en 37.0 segundos con los siguientes valores:
hmin = 0.01 s
hmax = 6.0 s
eRK = 0.002
La mayor complejidad matemática del método 2, unido a que necesita pasos de tiempos
más pequeños para alcanzar la precisión requerida, hace que el proyectil base burn
método 2 necesite un mayor tiempo de cálculo. Este hecho condiciona su aplicación
para resolver problemas donde se requiera un cálculo masivo de trayectorias, siendo
preferible el método 1.
La elección de eRK constituye un equilibrio entre precisión y tiempo de cálculo. Si se
disminuye eRK, aumentan los tramos donde predomina la utilización de un paso de
tiempo mínimo, aumentando el tiempo de computación y naturalmente la precisión.
El paso de tiempo comienza con el valor mínimo al comienzo de la trayectoria, para ir
aumentando paulatinamente en la rama ascendente, conforme a la regla establecida
anteriormente, para al llegar a la zona cercana al vértice de la trayectoria empezar a
disminuir nuevamente, hasta que se sale de dicha zona y acomete la rama descendente,
donde el paso de tiempo vuelve a aumentar hasta que llega a la zona final, donde
nuevamente vuelve a disminuir. En las inmediaciones del vértice de la trayectoria, el
paso de tiempo se hace mínimo, a la par que em aumenta fuertemente y de manera muy
rápida. Este punto constituye el valor más crítico de toda la trayectoria y ha supuesto un
serio inconveniente a la hora de acometer un cálculo masivo de trayectorias. De hecho,
al efectuar un cálculo intensivo de trayectorias, ha aparecido un error en una de cada
quinientas trayectorias, en términos de media estadística. En la medida que em se
incrementa drásticamente y de forma muy rápida en el vértice, el paso de tiempo tiene
que disminuir de manera igual de rápida. En algunas ocasiones (un dos por mil,
VI.-55
aproximadamente, de las trayectorias), em aumenta de modo tan rápido que el paso de
tiempo no es capaz de disminuir con la misma celeridad, apareciendo un error por
inestabilidad numérica.
A continuación se va a evaluar la segunda estrategia para el ajuste del paso de tiempo.
Recordando el parámetro de error eRK, así como el paso mínimo hmin y máximo hmax
definidos anteriormente, se va a aplicar el siguiente procedimiento.
¾ Si em < eRK , se substituye h por 2h teniendo que ser, además 2h ≤ hmax .
¾ Si em ≥ eRK , se substituye h por h/2 teniendo que ser, además h 2 ≥ hmin .
Esta velocidad de crecimiento y decrecimiento del paso de tiempo representa un criterio
conservativo, ya que limita la velocidad a la que el paso de tiempo cambia, lo cual
aunque aumenta el tiempo de cálculo, también proporciona un resultado más uniforme
en la forma en que las magnitudes varían; que de otra forma, podría ocasionar fuertes
oscilaciones en las variables. Empleando esta técnica, resulta más importante si cabe
limitar el paso de tiempo entre un valor mínimo y un valor máximo. Aunque, al igual
que ocurrió anteriormente al emplear la primera estrategia de ajuste del paso de tiempo,
el límite más importante a imponer es el mínimo, siendo el límite superior un valor de
seguridad, dado que el propio método de ajuste del paso de tiempo limita el crecimiento
del propio paso.
Con respecto al análisis del paso de tiempo mínimo y máximo, y a su velocidad de
cambio, cabe extraer las mismas conclusiones cualitativas que se comentaron
anteriormente, al analizar la primera estrategia.
Se va a repetir el mismo análisis de trayectorias que se efectuó anteriormente con la
primera estrategia de ajuste del paso de tiempo, pero empleando la segunda estrategia de
ajuste del paso de tiempo para el proyectil base burn método 1. Los parámetros eRK, hmin
y hmax se ajustaran considerando como patrón la deriva y el alcance, siendo el objetivo
obtener precisiones del orden de decímetros, para alcances máximos. Se ha computando
una trayectoria balística en 1.4 segundos con los siguientes valores:
VI.-56
hmin = 0.04 s
hmax = 6.0 s
eRK = 0.1
Realizando el mismo análisis anterior para el proyectil base burn método 2, los
parámetros eRK, hmin y hmax se ajustaran considerando como patrón la deriva y el alcance,
siendo el objetivo obtener precisiones del orden de decímetros, para alcances máximos.
Se ha computando una trayectoria balística en 45 segundos con los siguientes valores:
hmin = 0.01 s
hmax = 6.0 s
eRK = 0.001
Al igual que ocurrió al analizar la primera estrategia de ajuste del paso de tiempo, la
mayor complejidad del método 2, unido a que necesita pasos de tiempos más pequeños
para alcanzar la precisión requerida, hace que el proyectil base burn método 2 necesite
un mayor tiempo de cálculo. Este hecho condiciona su aplicación para resolver
problemas donde se requiera un cálculo masivo de trayectorias, siendo preferible el
método 1.
Recordando el problema que había aparecido con la primera estrategia de ajuste del
paso de tiempo; en el vértice de la trayectoria el paso de tiempo se hace mínimo a la par
que em aumenta fuertemente y de manera muy rápida, constituyendo el vértice el punto
más complicado de toda la trayectoria. Cuando em aumenta fuertemente y de forma muy
rápida en el vértice, el paso de tiempo tiene que disminuir de manera igual de rápida. No
obstante, el problema de inestabilidad numérica, que se había manifestado
anteriormente, no ocurre al emplear la segunda estrategia de ajuste del paso de tiempo.
Esto es debido a que cuando em es superior a eRK, el paso de tiempo disminuye
dividiéndose por dos, aunque em sea muy similar a eRK, mientras que si se hubiese
utilizado la primera estrategia de ajuste, el paso de tiempo habría variado muy poco.
Esto conlleva a que cuando em aumente rápidamente, y el paso de tiempo se vea forzado
a disminuir con la misma urgencia, al haber empleado la segunda estrategia, se tiene un
remanente debido a que durante una serie de pasos de tiempo anteriores, el paso de
tiempo se ha ido dividiendo por dos teniendo un valor mucho más inferior.
VI.-57
Este hecho condiciona la elección de la segunda estrategia de ajuste del paso de tiempo,
para un procedimiento que necesite del cálculo de un gran número de trayectorias. Es
cierto que al emplear la primera estrategia, el tiempo de computación por trayectoria es
inferior, aunque la diferencia solo es de una décima de segundo o lo que es lo mismo,
un seis por ciento únicamente.
8.7. Ordenada máxima
Durante el proceso de integración de la trayectoria, el punto en el cual el proyectil
alcanza su ordenada máxima se obtiene en el momento en el cual se detecta que el
proyectil ha comenzado a descender. Para detectar el momento en el que el proyectil
comienza a descender, se analiza la componente vertical de la velocidad, que es positiva
durante la rama ascendente de la trayectoria y negativa durante la rama descendente. El
inicio del descenso del proyectil queda fijado, por lo tanto, por el cambio de signo de
dicha componente.
Una vez detectado que el proyectil ha comenzado a descender, se construye la siguiente
parábola:
1
E 2 (t ) = E2 + E& 2 ⋅ t + E&&2 ⋅ t 2
2
siendo
E2 = X 2 +
(X
+ X 32 )
2R
2
1
( X ⋅ u + X 3 ⋅ u3 )
E& 2 = u 2 + 2 1 1
2R
( X ⋅ u& + u ⋅ u + X 3 ⋅ u&3 + u3 ⋅ u3 )
E&&2 = u& 2 + 2 1 1 1 1
2R
VI.-58
Obtenida la parábola que aproxima la trayectoria del proyectil en las cercanías del punto
de ordenada máxima, su valor máximo viene determinado por
E 2max = E2 −
1
2
(E& )
2
2
E&&2
8.8. Condición de parada
La condición de parada, incorporada en el procedimiento, ocurre cuando se ha
alcanzado la altura cero en la rama descendente de la trayectoria. Esa zona tiene la
particularidad de demandar un paso de tiempo pequeño por lo que una vez superada esta
condición se detiene el proceso, y se retrotrae hacia atrás, realizando una aproximación
lineal de la trayectoria hasta el punto de corte con la altura cero. A continuación, se
interpola para obtener el valor de tiempo de vuelo computado correspondiente a altura
cero.
t final = t −
E2
u2
Análogamente, se corrigen las coordenadas del proyectil en el punto final de la
trayectoria
⎛E ⎞
X 1 final = X 1 − u1 ⎜⎜ 2 ⎟⎟
⎝ u2 ⎠
⎛E ⎞
X 3 final = X 3 − u3 ⎜⎜ 2 ⎟⎟
⎝ u2 ⎠
El alcance se obtiene de
R = X 12final + X 32final
VI.-59
Por criterios de seguridad se ha instalado una segunda condición de parada por tiempo
de vuelo. Cuando el tiempo de vuelo computado alcanza los quinientos segundos, el
proceso de cálculo se detiene.
8.9. Atmósfera
Los cálculos termodinámicos se realizan a partir de la altura del proyectil, corregida por
esfericidad terrestre. Para ello se utiliza la aproximación de atmósfera ICAO: humedad
nula, atmósfera en equilibrio y se cumple la ley de los gases perfectos.
En la troposfera se asume una variación lineal de la temperatura con la altura y en la
estratosfera se considera que la temperatura es constante. Empleando la ecuación de los
gases perfectos se obtiene la densidad y la presión, y finalmente la velocidad del sonido
y el número de Mach (Cucharero, 1992). Así, se tiene en la Troposfera:
y < 11000 m.
T = T0 − ay
T0 =288,16 K
a = 0.0065 K/m
P ⎛T ⎞
=⎜ ⎟
P0 ⎜⎝ T0 ⎟⎠
K a
P0 = 1.0133·105 Pa
K = 0.034165 K/m
Y en la Estratosfera:
11000 m. < y < 20000 m.
T = T1
T1 =216,66 K
P ⎛ T1 ⎞
=⎜ ⎟
P0 ⎜⎝ T0 ⎟⎠
K a
⎧ K
⎫
⋅ exp⎨− ( y − 11000)⎬
⎩ T1
⎭
Y la densidad, tanto en la Troposfera como en la Estratosfera, se obtiene de:
VI.-60
P T
ρ
=
ρ 0 P0 T0
ρ0 = 1.225 Kg./m3
VI.-61
9. Presentación de resultados
Calculada la aceleración del proyectil, se obtiene el vector de ataque, y se realiza una
nueva iteración para obtener mejoras en el cálculo de la fuerza de resistencia directa y
de la fuerza lateral del proyectil. Tras esto, se obtiene el vector de ataque mejorado y la
proyección del vector de ataque en el plano π. En los cálculos no se ha considerado el
efecto del viento.
La salida de resultados es a través de un fichero de texto denominado trayectoria donde
se escribe
-
TIEMPO (tiempo de vuelo en segundos)
-
POSICIÓN_X
-
VELOCIDAD_X VELOCIDAD_Y VELOCIDAD_Z (vector velocidad del proyectil en m/s)
-
ATAQUE_X
ATAQUE_Y
-
ATAQUE_U
ATAQUE_V (vector de ataque proyectado sobre el plano π)
-
F.R.D._X
F.R.D._Y
-
F. LAT._X
F. LAT._Y
-
F. MAG._X
-
CORIOLIS_X CORIOLIS_Y CORIOLIS_Z (fuerza de Coriolis en m/s2)
-
GRAVEDAD_X
-
F. B.B._X
-
MACH (número de Mach)
-
SPIN (velocidad de rotación axial del proyectil en rad/s)
POSICIÓN_Y POSICIÓN_Z (vector de posición del proyectil en metros)
ATAQUE_Z (vector de ataque del proyectil en rad)
F.R.D._Z (fuerza de resistencia en m/s2)
F. LAT._Z (fuerza lateral en m/s2)
F. MAG._Y
F. MAG._Z (fuerza Magnus en m/s2)
GRAVEDAD_Y
F. B.B._Y
GRAVEDAD_Z (aceleración de la gravedad en m/s2)
F. B.B._Z (fuerza base burn en m/s2)
Las gráficas se han construido utilizando MATLAB R2006a. Se han incluido las
gráficas más significativas: la trayectoria del proyectil bidimensional y tridimensional,
el módulo de la velocidad, el vector de ataque proyectado sobre el plano π, el ángulo de
ataque, el módulo de la fuerza total, el número de Mach y la velocidad de rotación axial.
Estas gráficas se han combinado con otras, en la que se ha supuesto que la unidad base
burn se encontraba desactivada, con lo que se puede contrastar el efecto base burn en las
variables de cálculo.
VI.-62
Asimismo, también se visualizarán las gráficas relativas a parámetros aerodinámicos y
base burn de aquellas magnitudes representativas.
9.1. Proyectil OE155F2RTC FR HEA BB1
El proyectil OE155F2RTC FR HEA BB1, disparado desde un tubo 155AUF1, se
resolverá aplicando el método 1, con una carga DLE-CE-155F1/7 C7.
TRAYECTORIA
VI.-63
VELOCIDAD:
VI.-64
Puede observarse como el módulo de la velocidad presenta un mínimo cerca del punto
de ordenada máxima, ya que la velocidad disminuye en la rama ascendente y aumenta
en la descendente. La componente vertical de la velocidad aumenta en la rama
ascendente y disminuye en la rama descendente, siendo nula en el vértice de la
trayectoria, si bien no tiene porque coincidir con el mínimo del módulo de la velocidad,
ya que este es una combinación de las tres componentes de la velocidad y viene
afectado por todas ellas.
ÁNGULO DE ATAQUE
La representación del vector de ataque en el plano π presenta una importante
discontinuidad asociada al punto de ordenada máxima. Como ya se comentó con
anterioridad, ésta discontinuidad aparece debido a que se han eliminado los términos en
derivadas de la ecuación del vector de ataque.
VI.-65
FUERZA
VI.-66
Se ha dibujado la gráfica con la unidad base burn desactivada (BB off) así como con la
unidad base burn activada, indicando en este caso el efecto de todas las componentes
del vector fuerza (con BB), y de todas las componentes del vector fuerza excepto la
debida a la unidad base burn (sin BB), con lo que puede observarse el porcentaje debido
a la componente base burn.
NÚMERO DE MACH
VI.-67
VELOCIDAD DE ROTACIÓN AXIAL
VI.-68
COEFICIENTE DE LA FUERZA DE RESISTENCIA PARA ÁNGULO DE ATAQUE
CERO CD0
COEFICIENTE CUADRÁTICO DE LA FUERZA DE RESISTENCIA CDα2
VI.-69
COEFICIENTE DE LA FUERZA DE SUSTENTACIÓN CLα
COEFICIENTE CÚBICO DE LA FUERZA DE SUSTENTACIÓN CLα3
VI.-70
COEFICIENTE DEL MOMENTO DE GIRO CMα
COEFICIENTE DE LA FUERZA MAGNUS Cmag-f
VI.-71
COEFICIENTE DEL MOMENTO DE AMORTIGUAMIENTO DE ROTACIÓN Cspin
COEFICIENTE DE REDUCCIÓN DE RESISTENCIA BB CxBB
VI.-72
PARÁMETRO DE INYECCIÓN DE EFICIENCIA ÓPTIMA DEL MOTOR BASE
BURN I0
ÁREA DE COMBUSTIÓN DEL PROPULSANTE BASE BURN SC
VI.-73
9.2. Proyectil OE155BONUS FR CBL/DUP BB1
El proyectil OE155BONUS FR CBL/DUP BB1, disparado desde un tubo 155AUF1, se
resolverá aplicando el método 1, con una carga DLE-CE-B0/7 C7.
TRAYECTORIA
VI.-74
VELOCIDAD:
VI.-75
ÁNGULO DE ATAQUE
VI.-76
FUERZA
VI.-77
Se ha dibujado la gráfica con la unidad base burn desactivada (BB off) así como con la
unidad base burn activada, indicando en este caso el efecto de todas las componentes
del vector fuerza (con BB), y de todas las componentes del vector fuerza excepto la
debida a la unidad base burn (sin BB), con lo que puede observarse el porcentaje debido
a la componente base burn.
NÚMERO DE MACH
VELOCIDAD DE ROTACIÓN AXIAL
VI.-78
COEFICIENTE DE LA FUERZA DE RESISTENCIA PARA ÁNGULO DE ATAQUE
CERO CD0
VI.-79
COEFICIENTE CUADRÁTICO DE LA FUERZA DE RESISTENCIA CDα2
COEFICIENTE DE LA FUERZA DE SUSTENTACIÓN CLα
VI.-80
COEFICIENTE CÚBICO DE LA FUERZA DE SUSTENTACIÓN CLα3
COEFICIENTE DEL MOMENTO DE GIRO CMα
VI.-81
COEFICIENTE DE LA FUERZA MAGNUS Cmag-f
COEFICIENTE DEL MOMENTO DE AMORTIGUAMIENTO DE ROTACIÓN Cspin
VI.-82
COEFICIENTE DE REDUCCIÓN DE RESISTENCIA BB CxBB
PARÁMETRO DE INYECCIÓN DE EFICIENCIA ÓPTIMA DEL MOTOR BASE
BURN I0
VI.-83
ÁREA DE COMBUSTIÓN DEL PROPULSANTE BASE BURN SC
9.3. Proyectil M864 US CBL/DUP BB2
El proyectil M864 US CBL/DUP BB2, disparado desde un tubo M198, se resolverá
aplicando el método 2, con una carga M232/5H CH5H.
TRAYECTORIA
VI.-84
VI.-85
VELOCIDAD:
Puede observarse como el módulo de la velocidad presenta un mínimo cerca del punto
de ordenada máxima, ya que la velocidad disminuye en la rama ascendente y aumenta
en la descendente. La componente vertical de la velocidad aumenta en la rama
ascendente y disminuye en la rama descendente, siendo nula en el vértice de la
trayectoria, si bien no tiene porque coincidir con el mínimo del módulo de la velocidad,
ya que este es una combinación de las tres componentes de la velocidad y viene
afectado por todas ellas.
ÁNGULO DE ATAQUE
VI.-86
La representación del vector de ataque en el plano π presenta una importante
discontinuidad asociada al punto de ordenada máxima. Como ya se comentó con
anterioridad, ésta discontinuidad aparece debido a que se han eliminado los términos en
VI.-87
derivadas de la ecuación del vector de ataque.
FUERZA
VI.-88
Se ha dibujado la gráfica con la unidad base burn desactivada (BB off) así como con la
unidad base burn activada, indicando en este caso el efecto de todas las componentes
del vector fuerza (con BB), y de todas las componentes del vector fuerza excepto la
debida a la unidad base burn (sin BB), con lo que puede observarse el porcentaje debido
a la componente base burn.
NÚMERO DE MACH
VELOCIDAD DE ROTACIÓN AXIAL
VI.-89
COEFICIENTE DE LA FUERZA DE RESISTENCIA PARA ÁNGULO DE ATAQUE
CERO CD0
VI.-90
COEFICIENTE CUADRÁTICO DE LA FUERZA DE RESISTENCIA CDα2
COEFICIENTE DE LA FUERZA DE SUSTENTACIÓN CLα
VI.-91
COEFICIENTE CÚBICO DE LA FUERZA DE SUSTENTACIÓN CLα3
COEFICIENTE DEL MOMENTO DE GIRO CMα
VI.-92
COEFICIENTE DE LA FUERZA MAGNUS Cmag-f
COEFICIENTE DEL MOMENTO DE AMORTIGUAMIENTO DE ROTACIÓN Cspin
VI.-93
CAMBIO EN LA PRESIÓN DE BASE ADIMENSIONAL PARA CAMBIOS EN EL
PARÁMETRO DE INYECCIÓN DE PROPULSANTE ∂BP ∂I
VI.-94
VI.-95
DERIVADA DE REFERENCIA DE LA MASA DE PROPULSANTE DEL MOTOR
m& *f
VI.-96
VI.-97
VI.-98
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO VII
EVALUACIÓN DEL CENTRO DE MASAS Y
DEL MOMENTO DE INERCIA DE UN
PROYECTIL ASISTIDO
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
VII.-1
VII.-2
VII.-EVALUACIÓN DEL CENTRO DE MASAS Y DEL MOMENTO
DE INERCIA DE UN PROYECTIL ASISTIDO
1. Estimación del centro de masas
La localización del centro de masas (medido desde la ojiva) de un proyectil asistido,
viene dada por
X CG = X CG0 +
(X
CG0
)
− X CGB (m − m0 )
(m0 − mB )
siendo X CG0 la distancia inicial del centro de masas a la ojiva, X CGB la distancia del
centro de masas a la ojiva al finalizar el quemado del propulsante, m la masa del
proyectil, m0 la masa inicial del proyectil y mB la masa del proyectil al finalizar el
quemado del propulsante.
Recordando la definición de centro de masas:
X CG0 =
1
m0
∫ X ⋅ dm
proyectil
y separando las componentes debidas al proyectil sin propulsante y al propio
propulsante
X CG0 =
1
m0
∫ X ⋅ dm
proyectil − propulsante
+
1
m0
1
∫ X ⋅ dm = m ∫ X ⋅ dm
propulsante
X CG0 = X CGB +
0
proyectil − propulsante
+
1
X f ⋅ mf
m0
1
X f ⋅mf
m0
La última integral se ha evaluado introduciendo la masa de propulsante del proyectil mf
y una distancia que se ha denominado Xf. Para estimar esta magnitud se va a hacer uso
de este mismo valor para proyectiles asistidos semejantes. Se denominan proyectiles
VII.-3
asistidos a los proyectiles base burn BB y a los proyectiles de propulsión adicional RAP
(rocket assisted projectiles). Estos últimos son proyectiles que incorporan un motor
cohete de propulsante sólido en la base del proyectil lo que aumenta la velocidad del
proyectil y permite incrementar notablemente el alcance. Es como si a un proyectil base
burn se le hubiera sustituido la unidad base burn por un motor cohete. Aunque desde un
punto de vista de funcionamiento, los proyectiles BB y RAP son distintos, a efectos
másicos la diferencia es mínima y permite ampliar el número de proyectiles semejantes
para estimar el factor Xf. Generalmente, la masa de propulsante que transporta un
proyectil RAP es superior a la que transporta un proyectil BB del mismo calibre.
PROYECTIL
OE155F2RTC FR HEA
OE155BONUS FR CBL/DUP
OEF3BB NO HEA
M864 US CBL/DUP
DM662 NO CBL BB2
M549A1 US HEA
OE120F2AP FR HEA
M548 US HEA
M913 US HEA
M927 US HEA
Tipo
BB
BB
BB
BB
BB
RAP
RAP
RAP
RAP
RAP
d (m)
0.155
0.155
0.155
0.155
0.155
0.155
0.120
0.105
0.105
0.105
m0 (Kg)
43.95
45.140
43.670
46.947
46.950
43.545
15.700
12.927
14.923
14.923
mf (Kg) XCG0 (m) XCGB (m)
1.350
0.5348
0.5256
0.927
0.5590
0.5535
1.350
0.5348
0.5256
1.211
0.5913
0.5852
1.211
0.5913
0.5852
2.880
0.5465
0.5340
1.335
0.3380
0.3290
0.454
0.3703
0.3685
0.998
0.3777
0.3663
0.998
0.3777
0.3663
En la siguiente tabla se ha calculado la expresión X CG − X CG , donde se ha despejado
0
B
Xf, con la que se ha calculado un valor promedio que se ha introducido en la fórmula
que se escribe a continuación, y con la que se ha calculado la última columna.
PROYECTIL
OE155F2RTC FR HEA
OE155BONUS FR CBL/DUP
OEF3BB NO HEA
M864 US CBL/DUP
DM662 NO CBL BB2
M549A1 US HEA
OE120F2AP FR HEA
M548 US HEA
M913 US HEA
M927 US HEA
XCG0 - XCGB
0.0092
0.0055
0.0092
0.0061
0.0061
0.0125
0.0090
0.0018
0.0114
0.0114
VII.-4
Xf
0.2995
0.2678
0.2976
0.2365
0.2365
0.1890
0.1058
0.0513
0.1705
0.1705
Xf /d
1.93
1.73
1.92
1.53
1.53
1.22
0.88
0.49
1.62
1.62
XCG0 - XCGB (for)
0.0069
0.0046
0.0069
0.0058
0.0058
0.0149
0.0148
0.0053
0.0102
0.0102
X CG0 = X CGB + 1.45 ⋅ d
mf
m0
Finalmente, se ha confeccionado una gráfica en la que se ha representado la expresión
X CG0 − X CGB real y la obtenida de la fórmula estimada.
XCG0-XCGB
XCG0-XCGB (m)
0.016
0.014
0.012
0.01
real
fórmula
0.008
0.006
0.004
0.002
0
EA
H
S
U
A
7 HE
92
M US A
E
EA
3
91 S H R H
M
F
U
8
AP A
54
M 0F2 HE 2
B
2
S
E1 U L B
O A1
B
C
P
9
U
O
54
P
M 2 N L/ D
U
D
66 C B A
L/
M
D US HE CB
4
NO R
F
86
M BB S
EA
3 NU
H
EF BO FR
O
55 T C
R
E1
O 5F2
5
E1
O
PROYECTIL
VII.-5
2. Estimación del momento de inercia
El momento de inercia axial de un proyectil asistido viene dado por
I X = I X0 +
(I
X0
)
− I X B (m − m0 )
(m0 − mB )
siendo I X 0 el momento de inercia axial inicial, I X B el momento de inercia axial al
finalizar el quemado del propulsante, m la masa del proyectil, m0 la masa inicial del
proyectil y mB la masa del proyectil al finalizar el quemado del propulsante.
El momento de inercia axial puede aproximarse por la siguiente expresión:
I X = 0.14 ⋅ m ⋅ d 2
Si bien se ha podido comprobar que esta expresión da una buena aproximación en las
estimaciones de IX0, el resultado obtenido para IXB no es tan satisfactorio como el
obtenido para IX0, por lo que se va a realizar un análisis para estimar IXB.
Recordando la definición de momento de inercia:
I X 0 = ∫ R 2 ⋅ dm
proyectil
y separando las componentes debidas al proyectil sin propulsante y al propio
propulsante
I X 0 = ∫ R 2 ⋅ dm = ∫ R 2 ⋅ dm
proyectil
proyectil − propulsante
+ ∫ R 2 ⋅ dm = I X B + m f ⋅ R 2f
propulante
La última integral se ha evaluado introduciendo la masa de propulsante del proyectil mf
y una distancia de inercia que se ha denominado Rf. Para estimar esta magnitud se va a
hacer uso de este mismo valor para proyectiles asistidos semejantes, análogamente a
VII.-6
como se hizo para estimar anteriormente el centro de masas.
PROYECTIL
OE155F2RTC FR HEA
OE155BONUS FR CBL/DUP
OEF3BB NO HEA
M864 US CBL/DUP
DM662 NO CBL BB2
M549A1 US HEA
OE120F2AP FR HEA
M548 US HEA
M913 US HEA
M927 US HEA
Tipo
BB
BB
BB
BB
BB
RAP
RAP
RAP
RAP
RAP
d (m)
0.155
0.155
0.155
0.155
0.155
0.155
0.12
0.105
0.105
0.105
m0 (Kg)
43.950
45.140
43.670
46.947
46.950
43.545
15.700
12.927
14.923
14.923
mf (Kg)
1.350
0.927
1.350
1.211
1.211
2.880
1.335
0.454
0.998
0.998
IX0
(kgm2)
0.1491
0.1500
0.1491
0.1580
0.1580
0.1490
0.0302
0.0203
0.0239
0.0239
IXB
(kgm2)
0.1461
0.1480
0.1461
0.1547
0.1547
0.1413
0.0291
0.0199
0.0229
0.0229
En la siguiente tabla se ha calculado la expresión I X 0 − I X B , para despejar R 2f , con la
que se ha estimado la siguiente fórmula
I X B = I X 0 − 0 .1 ⋅ m f ⋅ d 2
En la siguiente tabla se ha referenciado como IX0 (for1) e IXB (for1) los momentos de
inercia IX0 e IXB calculados con la expresión I X = 0.14 ⋅ m ⋅ d 2 . El momento de inercia
axial IXB (for2) se ha calculado empleando la expresión I X B = I X 0 − 0.1 ⋅ m f ⋅ d 2 (IX0 es el
valor real) y el momento de inercia IXB (for3) se ha calculado usando la expresión
I X B = 0.14 ⋅ m0 ⋅ d 2 − 0.1 ⋅ m f ⋅ d 2 .
PROYECTIL
OE155F2RTC FR HEA
OE155BONUS FR CBL/DUP
OEF3BB NO HEA
M864 US CBL/DUP
DM662 NO CBL BB2
M549A1 US HEA
OE120F2AP FR HEA
M548 US HEA
M913 US HEA
M927 US HEA
IX0 - IXB
R 2f
R 2f d 2
0.0030
0.0020
0.0030
0.0033
0.0033
0.0077
0.0011
0.0004
0.0010
0.0010
0.0022
0.0022
0.0022
0.0027
0.0027
0.0027
0.0008
0.0009
0.0010
0.0010
0.0925
0.0898
0.0925
0.1134
0.1134
0.1113
0.0572
0.0839
0.0936
0.0936
VII.-7
IX0
(for1)
0.1478
0.1518
0.1469
0.1579
0.1579
0.1465
0.0317
0.0200
0.0230
0.0230
IXB
(for1)
0.1433
0.1487
0.1423
0.1538
0.1538
0.1368
0.0290
0.0193
0.0215
0.0215
IXB
(for2)
0.1459
0.1478
0.1459
0.1551
0.1551
0.1421
0.0283
0.0198
0.0228
0.0228
IXB
(for3)
0.1446
0.1496
0.1436
0.1550
0.1550
0.1395
0.0297
0.0195
0.0219
0.0219
A continuación, se pueden observar estos mismos resultados en forma de gráficas. Para
poder ver los detalles de manera más clara se han separado los proyectiles de 155 mm
de los de 105 mm. Así, se puede comprobar como IXB (for2) e IXB (for3) dan un
resultado más exacto.
IX0
0.18
0.16
IX0 (Kgm2)
0.14
0.12
0.1
real
fórmula (1)
0.08
0.06
0.04
0.02
0
A
HE
US A
7 HE
92
M US A
E
EA
3
91 S H R H
M
U
F
8
AP A
54
M 0 F2 HE 2
B
2
S
E1 U L B
O A1
B
C
P
9
54 NO /DU
P
M
L
2
DU
6 6 CB A
L/
M
D US HE CB
4
O
86 B N FR A
M
S
E
3B NU H
R
EF
O 5 BO C F
5
T
E1 2R
O 5F
5
E1
O
PROYECTIL
VII.-8
IX0 (Kgm2)
IX0
0.16
0.158
0.156
0.154
0.152
0.15
0.148
0.146
0.144
0.142
0.14
real
fórmula (1)
BL
2
BB
A
HE
C
EA
L
CB
P
EA
DU
H
/
BL
S
O
C
NO
U
N
S
1
U
2
9A
4
66
M
54
M
D
86
M
H
FR
FR
S
TC
NU
R
F2
BO
B
3B
55
55
EF
O
E1
O
E1
O
/D
U
P
PROYECTIL 155 mm
IX0
0.0350
IX0 (Kgm2)
0.0300
0.0250
0.0200
real
fórmula (1)
0.0150
0.0100
0.0050
0.0000
92
M
91
M
54
M
7
3
U
U
S
S
S
EA
EA
EA
FR
H
EA
VII.-9
H
H
H
AP
F2
U
20
8
E1
O
PROYECTIL 120 Y 105 mm
0.18
0.16
0.14
real
fórmula (1)
fórmula (2)
fórmula (3)
0.12
0.1
0.08
0.06
0.04
0.02
0
IXB (Kgm2)
IXB
EA
H
S A
U
7 HE
92
M US EA EA
3 H
H
91
M U S FR
8
P
A
54 2A
M 0F HE B2
2
S B
E1 1 U B L
O
P
9A C
O
DU
54
P
M 2 N BL/
U
/D
66 C
EA L
M
D US H CB
4
O R
86 B N F A
S
E
M
H
3B NU
R
EF O
O 5B C F
5
T
E1 2R
O 5F
5
E1
O
PROYECTIL
VII.-10
IXB
0.16
IXB (Kgm2)
0.155
0.15
real
fórmula (1)
fórmula (2)
fórmula (3)
0.145
0.14
0.135
0.13
0.125
BL
2
BB
A
HE
C
EA
L
CB
P
EA
DU
H
/
BL
S
O
C
NO
H
FR
FR
S
TC
NU
U
N
S
1
U
2
9A
4
66
M
54
M
D
86
M
BO
R
F2
B
3B
55
55
EF
O
E1
O
E1
O
/D
U
P
PROYECTIL 155 mm
IXB
0.0350
IXB (Kgm2)
0.0300
0.0250
real
fórmula (1)
fórmula (2)
fórmula (3)
0.0200
0.0150
0.0100
0.0050
0.0000
92
M
91
M
54
M
3
8
U
U
U
S
S
S
EA
EA
EA
FR
H
EA
VII.-11
H
H
H
AP
F2
20
7
E1
O
PROYECTIL 120 Y 105 mm
VII.-12
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO VIII
OPTIMIZACIÓN
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
VIII.-1
VIII.-2
VIII.-OPTIMIZACIÓN
Las técnicas de optimización tienen como objetivo encontrar el óptimo (o los óptimos)
globales de cualquier problema. Desafortunadamente, sólo en algunos casos puede
garantizarse la convergencia hacia el óptimo global. Las técnicas clásicas pueden
localizar solo óptimos locales por lo que se debe recurrir a la optimización no lineal,
pero estas técnicas no garantizan la convergencia hacia el óptimo global, a menos que se
usen técnicas exhaustivas o que se consideren tiempos infinitos de convergencia. A
menudo, no hay manera de saber si una cierta solución a un problema es el óptimo
global o sólo un óptimo local muy alto.
El término heurística proviene de la palabra griega heuriskein relacionado con el
concepto de encontrar. Un algoritmo heurístico es un procedimiento de búsqueda de
soluciones casi optimales a un coste computacional razonable, sin ser capaz de
garantizar la optimalidad o factibilidad de las soluciones empleadas, ni determinar a que
distancia de la solución óptima nos encontramos (Reeves, 1995).
Las heurísticas son métodos para resolver problemas complejos de forma aproximada,
son flexibles y tiene como objetivo, encontrar soluciones de buena calidad en un tiempo
computacional razonable.
En los últimos años ha habido un crecimiento en el desarrollo de procedimientos
heurísticos para resolver problemas combinatorios, debido a la necesidad de disponer de
herramientas que permitan ofrecer soluciones rápidas a problemas reales. Los
problemas de optimización combinatoria en particular, son de gran dificultad debido a
su complejidad, ya que crece exponencialmente con el tamaño del problema, por lo cual
se pretende que los métodos heurísticos se acerquen a la solución óptima en un tiempo
razonable.
Las metaheurísticas son estrategias maestras inteligentes para diseñar o mejorar
procedimientos heurísticos muy generales, con un alto rendimiento. El término
metaheurísticas se obtiene de anteponer a heurística el prefijo meta que significa más
allá o a un nivel superior.
VIII.-3
Actualmente, el interés primordial de los investigadores es el de diseñar métodos
generales que sirvan para resolver clases o categorías de problemas. Dado que estos
métodos generales sirven para construir o guiar el diseño de métodos que resuelvan
problemas específicos, se les ha dado el nombre de metaheurísticos. La siguiente
definición fue introducida por Osman y Kelly (1995): "Los procedimientos
metaheurísticos son una clase de métodos aproximados que están diseñados para
resolver problemas difíciles de optimización combinatoria, en los que los heurísticos
clásicos no son ni efectivos ni eficientes. Los metaheurísticos proporcionan un marco
general para crear nuevos algoritmos híbridos combinando diferentes conceptos
derivados de: inteligencia artificial, evolución biológica y mecanismos estadísticos"
A lo largo de las dos últimas décadas, se han ido desarrollando diversos procedimientos
de búsqueda de soluciones que tenían un objetivo común; resolver un determinado
problema para el que era muy costoso obtener su solución exacta mediante los métodos
de optimización tradicionales. El incremento del número de parámetros de los que
dependen las funciones a optimizar ha hecho de muy difícil aplicación los algoritmos
clásicos, lo que ha dada lugar a nuevos algoritmos heurísticos. Aparejado a este hecho,
se ha producido un nuevo concepto en el que se ha renunciado a parte de la exactitud a
cambio de una mayor rapidez.
La dificultad de encontrar el mejor óptimo mediante métodos clásicos, en situaciones
donde se tienen múltiples óptimos, resulta evidente. Si a esto se le suma el hecho de que
la función a optimizar tiene un número elevado de variables de las que depende, la
complicación del problema crece radicalmente.
VIII.-4
Un problema de optimización podría formularse de la siguiente manera:
min{ f ( x ) / x ∈ X , X ⊆ S }
siendo S el espacio de soluciones, X la región factible, x una solución factible y f una
función real. Así pues, si S es finito, se tendrá un problema de optimización
n
combinatoria, mientras que si S = IR será de optimización continua. Un problema de
optimización se representa por el par (S, f), donde S representa su espacio de soluciones
y f la función objetivo.
Existen muchos problemas de optimización que son muy difíciles de resolver de manera
exacta. En ocasiones se tienen problemas NP-duros, tales que no se conoce ningún
algoritmo que pueda resolverlos exactamente y tienen complejidad polinomial (es decir,
cuyo tiempo de resolución crece polinomialmente con el tamaño del problema). En
estos casos, se plantean algoritmos que permitan obtener soluciones cercanas al valor
óptimo de la función objetivo, invirtiendo un tiempo razonable. Este tipo de algoritmos
se denominan heurísticos, siendo útiles en las siguientes situaciones:
¾ No se conoce un procedimiento exacto de resolución del problema, o bien éste
requiere mucho esfuerzo computacional.
¾ No es necesario obtener la solución óptima global del problema siendo
suficiente con conocer una solución cercana a dicho óptimo.
¾ Se prefiere resolver de forma aproximada un modelo ajustado a la realidad que
resolver de forma exacta un modelo aproximado de la realidad, aunque se
emplee un tiempo similar.
¾ No se dispone del suficiente conocimiento específico acerca del problema como
para diseñar un método exacto de resolución.
Las principales ventajas de las heurísticas pueden escribirse como:
¾ Permiten una mayor flexibilidad en el manejo de las características del
problema.
¾ Generalmente, ofrecen más de una solución permitiendo una mayor capacidad
VIII.-5
de elección.
¾ Suele ser más fácil de entender la fundamentación de las heurísticas que los
complejos métodos matemáticos que utilizan las técnicas exactas.
Siendo las desventajas:
¾ No siempre es posible conocer la calidad de la solución obtenida,
recomendándose realizar acotaciones usando relajaciones, o bien generar varias
soluciones y compararlas con la obtenida.
¾ Dependencia de la estructura del problema considerado y falta de habilidad para
adaptarse a nuevas situaciones o modificaciones del problema de partida.
Para solucionar el segundo de los inconvenientes planteados, se recomienda disponer de
procedimientos heurísticos generales que puedan usarse para resolver una amplia
variedad de problemas, adaptando convenientemente los elementos que los definen. Las
metaheurísticas deben cumplir una serie de propiedades para garantizar su interés tanto
teórico como práctico, las cuales se enumeran a continuación:
1. Adaptabilidad; adecuarse a los diferentes contextos de aplicación y a los
distintos casos que se consideran.
2. Autonomía; facilitar su funcionamiento automático global, o al menos en
alguna de las facetas que la caractericen.
3. Coherencia; los elementos característicos deben derivarse de forma
natural de los principios que la inspiran.
4. Diversidad; se permite al usuario elegir entre las distintas soluciones
alternativas.
5. Eficacia; deben obtener soluciones óptimas o cercanas al óptimo para la
mayoría o todos los problemas reales que pretenda resolver.
6. Eficiencia; característica deseable en términos de recursos; es decir, de
tiempo de ejecución, de espacio de memoria y, en definitiva, de costos de
desarrollo.
7. Facilidad de uso; deben estar expresadas de manera clara y con el menor
número de parámetros posible, y siendo fáciles de entender y de usar.
8. Generalidad; se pueden utilizar provechosamente en una gama de
VIII.-6
situaciones y problemas tan amplia como sea posible.
9. Independencia; no dependencia del marco o del agente tecnológico en el
que se vaya a desarrollar.
10. Interactividad; el usuario pueda mejorarla a partir de su experiencia y
conocimientos.
11. Robustez; el rendimiento debe ser consistente para una gran variedad de
problemas y no debe estar ajustado sólo para resolver un pequeño
conjunto de ellos.
12. Simplicidad: deben basarse en un principio simple y claro, siendo fácil
de entender y de implementar.
VIII.-7
VIII.-8
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO IX
ALGORITMO DE RECOCIDO SIMULADO
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
IX.-1
IX.-2
IX.-ALGORITMO DE RECOCIDO SIMULADO
1. Índice
1. Índice
2. Introducción
3. Velocidad de enfriamiento
4. Implementación del algoritmo
5. Constante de Boltzmann
6. Condición de parada
7. Cálculo del siguiente paso
IX.-3
IX.-4
2. Introducción
Desde que Kirkpatrick (1983), Fox (1988), Hajek (1988) y Otten (1989) introdujeron el
concepto de recocido simulado (simulated annealing, SA), ha demostrado ser una
herramienta muy apropiada para resolver una amplia gama de problemas de
optimización. El recocido simulado es una variante de la búsqueda local, que permite
movimientos ascendentes para evitar quedar atrapado prematuramente en un óptimo
local. El nombre le viene de la idea en que está basado, un algoritmo diseñado en los
años cincuenta para simular el enfriamiento de material (un proceso denominado
recocido). En este sistema se tiene una función de coste (en términos físicos un
hamiltoniano), la cual asocia un costo con un estado del sistema a temperatura T. El
algoritmo trabaja iterativamente proponiendo cambios, aceptando o rechazando los
cambios que realiza.
Este algoritmo de enfriamiento simulado es un método de búsqueda por entornos,
caracterizado por un criterio de aceptación de soluciones vecinas basado en
consideraciones termodinámicas, que se adapta a lo largo de su ejecución. La
temperatura determina en que medida se pueden aceptar soluciones peores a la actual.
Más que un algoritmo en sentido estricto, sería más apropiado considerarlo como una
estrategia heurística que necesita de varias decisiones para que quede totalmente
diseñado, las cuales tienen una gran influencia en la calidad de las soluciones generadas.
Los algoritmos tradicionales de búsqueda local parten de una solución inicial, que
paulatinamente es transformada en otras que a su vez son mejoradas al introducirles
pequeñas perturbaciones o cambios (tales como cambiar el valor de una variable o
intercambiar los valores que tienen dos variables). Si este cambio da lugar a una
solución mejor que la actual, se sustituye ésta por la nueva, continuando el proceso
hasta que no es posible ninguna nueva mejora. Esto significa que la búsqueda finaliza
en un óptimo local, que no tiene por qué ser forzosamente el global.
Un modo de evitar este problema es permitir que algunos movimientos sean hacia
soluciones peores. Pero por si la búsqueda está realmente yendo hacia una buena
solución, estos movimientos de escape deben realizarse de un modo controlado. En el
caso del SA, esto se realiza controlando la frecuencia de los movimientos de escape
IX.-5
mediante una función de probabilidad, que hará disminuir la probabilidad de esos
movimientos hacia soluciones peores conforme avanza la búsqueda (y por tanto, se está
previsiblemente más cerca del óptimo global).
Los fundamentos de este sistema se basan en el trabajo de Metropolis (1953) en el
campo de la termodinámica estadística. Básicamente, Metropolis modeló el proceso de
recocido mencionado anteriormente, simulando los cambios energéticos en un sistema
de partículas conforme decrece la temperatura, hasta que converge a un estado estable.
Las leyes de la termodinámica dicen que a una temperatura T, la probabilidad de un
incremento energético de magnitud E se puede aproximar por
⎛ ΔE ⎞
⎟⎟
P(ΔE ) = exp⎜⎜ −
k
⋅
T
⎝ B ⎠
siendo kB una constante física denominada de Boltzmann. Obviamente es una función
de densidad de probabilidad ya que siempre es mayor o igual a cero y la suma sobre
todos los valores es igual a la unidad. Se puede observar que cuando el valor de T
disminuye, la distribución de Boltzmann se concentra en los estados de menor energía
mientras que si la temperatura se aproxima a cero, únicamente los estados con mínima
energía tienen una probabilidad de ocurrencia diferente de cero. En el algoritmo de
Metropolis se genera una perturbación aleatoria o cambios en el sistema y se calculan
cambios de energía resultantes basado en una búsqueda local, donde si hay una caída
energética el cambio se acepta (movimiento de mejora); por el contrario, si se produce
un incremento energético (movimiento de no mejora), el cambio será aceptado con una
probabilidad proporcional al factor de Boltzmann. Dichas probabilidades están basadas
en la analogía con el proceso de enfriamiento y se obtiene como función de la
temperatura del sistema. El proceso se repite durante un número predefinido de
iteraciones en series decrecientes de temperaturas, hasta que el sistema se enfría. En
cada iteración se va reduciendo la temperatura, y por tanto las probabilidades son cada
vez más pequeñas conforme avanza el procedimiento y se acerca a la solución óptima.
De esta forma, inicialmente se realiza una diversificación de la búsqueda sin controlar
demasiado el coste de las soluciones visitadas. En iteraciones posteriores resulta cada
IX.-6
vez más difícil aceptar malos movimientos, y por tanto se produce un descenso en el
coste.
En cada iteración se genera un número concreto de vecinos que puede ser fijo para toda
la ejecución o depender de la iteración concreta. Cada vez que se genera un vecino, se
aplica el criterio de aceptación para ver si sustituye a la solución actual. Si la solución
vecina es mejor que la actual, se acepta automáticamente, tal como se haría en la
búsqueda local clásica. En cambio, si es peor, aún existe la probabilidad de que el
vecino sustituya a la solución actual. Esto permite al algoritmo salir de óptimos locales
que de otro modo no lo haría en un esquema de búsqueda local. A mayor temperatura,
mayor probabilidad de aceptación de soluciones peores. Así, el algoritmo acepta
soluciones mucho peores que la actual al principio de la ejecución (exploración), pero
no al final (explotación).
El método del recocido se utiliza en la industria para obtener materiales más resistentes,
o más cristalinos, en general, para mejorar las cualidades de un material. El proceso
consiste en derretir el material (calentarlo a muy alta temperatura). En esa situación, los
átomos adquieren una distribución aleatoria dentro de la estructura del material y la
energía del sistema es máxima. Inicialmente, las moléculas vibran y se desplazan
caóticamente adoptando todo tipo de configuraciones en la estructura del metal de la
que forman parte. Luego se hace descender la temperatura muy lentamente, por etapas,
dejando que en cada una de esas etapas los átomos queden en equilibrio (es decir, que
los átomos alcancen una configuración óptima para esa temperatura). A medida que la
temperatura disminuye, se va ralentizando el movimiento de las moléculas y estas, de
acuerdo con la Termodinámica, tienden a adoptar las configuraciones de menor energía,
siendo ésta nula en el cero absoluto. Al final del proceso, los átomos forman una
estructura cristalina altamente regular, el material alcanza así una máxima resistencia y
la energía del sistema es mínima. Si el proceso de enfriamiento es demasiado rápido y
no se alcanza en cada etapa el equilibrio térmico, el sólido congelará en un estado cuya
estructura será amorfa.
Experimentalmente se comprueba que si la temperatura se hace descender bruscamente
o no se espera suficiente tiempo en cada etapa, al final la estructura del material no es la
optima. La rama de la Física llamada Mecánica Estadística se encargó de desarrollar una
IX.-7
serie de métodos para estudiar el comportamiento de grandes cantidades de átomos de
un sistema. Debido a que en promedio, en un sistema hay 1023 átomos por cm3,
solamente puede estudiarse el comportamiento más probable del sistema en equilibrio a
una temperatura dada. La experimentación mostró que los átomos de un sistema en un
proceso de recocido se comportan según el factor de probabilidad de Boltzmann.
Metropolis modelo el proceso de recocido; en cada iteración, cada átomo es sometido a
un desplazamiento aleatorio que provoca un cambio global en la energía del sistema
ΔE . Si ΔE < 0 , se acepta el cambio; en caso contrario, el cambio se acepta con una
probabilidad exp(− ΔE k B ⋅ T ) . Para un número grande de iteraciones, el sistema alcanza
el equilibrio en cada temperatura, y la distribución de probabilidad del sistema sigue la
distribución de Boltzmann.
A principios de la década de los ochenta, publicaciones independientes de Kirkpatrick
(1983) mostraron cómo este proceso podría ser aplicado a problemas de optimización,
asociando conceptos clave del proceso original de simulación, con elementos de
optimización combinatoria, según se indica en la siguiente tabla.
Simulación termodinámica Optimización combinatoria
Estados del sistema
Soluciones factibles
Energía
Coste
Cambio de estado
Solución en el entorno
Temperatura
Parámetro de control
Estado congelado
Solución heurística
Por tanto, cualquier implementación de búsqueda local puede convertirse en una
implementación SA al elegir elementos del entorno de modo aleatorio, aceptar
automáticamente todos los movimientos hacia una mejor solución, y aceptar los
movimientos a una solución peor, de acuerdo con una probabilidad dada por
P(ΔE ) = exp(− ΔE k B ⋅ T ) .
En este punto se observa que en la ecuación anterior un parámetro está libre, con lo que
se puede fijar una temperatura inicial y obtener la constante de Boltzmann para que el
problema progrese apropiadamente hacia el óptimo, o bien fijar la constante de
IX.-8
Boltzmann y ajustar la temperatura inicial. Cualquiera de las dos soluciones es posible,
aunque la temperatura va variando a lo largo del problema, por lo que se ha optado por
fijar la temperatura inicial a un valor unitario y ajustar la constante de Boltzmann. El
ajuste de la constante de Boltzmann es un trabajo peliagudo en extremo como se verá
posteriormente, ya que si ésta es muy grande, P(ΔE ) tiende a la unidad, y todos los
cambios se aceptan, con lo que el algoritmo pasa a ser un mero explorador de
soluciones; pero si la constante de Boltzmann es muy pequeña, P(ΔE ) tiende a cero, y
no se acepta ningún cambio, con lo que se tiene un algoritmo de descenso incapaz de
salir de mínimos locales. La asignación de valores a la constante de Boltzmann es lo
que permite al algoritmo escapar de óptimos locales para emprender la búsqueda de
otros óptimos mejores. Igual razonamiento podría haberse hecho en el caso de que el
parámetro de elección fuese la temperatura inicial y se hubiese fijado la constante de
Boltzmann.
El parámetro T es un parámetro de control denominado generalmente temperatura,
siguiendo la analogía con el proceso de enfriamiento físico. Una solución que suponga
un incremento
ΔE
en la función de coste se aceptará con probabilidad
exp(− ΔE k B ⋅ T ) . Por tanto, si se permite que T alcance valores suficientemente
pequeños, ya no habrá más movimientos a peores soluciones y la convergencia será a un
óptimo local.
Debe extremarse el cuidado en el manejo de esta temperatura que no tiene nada que ver
con la temperatura física que pueda aparecer en el problema. Esta temperatura es un
ente matemático que controla la aleatoriedad del proceso de optimización y no debe
confundirse con un parámetro físico.
Varios estudios teóricos demuestran que si T decrece lo suficientemente lento, el
proceso converge a la solución óptima. Sin embargo, una función de reducción de la
temperatura que garantizase esa convergencia al óptimo global, requeriría unos tiempos
de cálculo prohibitivos. A pesar de todo, muchos trabajos empíricos que se han
publicado usando programas de enfriamiento más rápidos demuestran que SA es una
heurística eficiente para una gran variedad de problemas combinatorios.
IX.-9
Para poder obtener un uso eficiente del algoritmo es necesario definir apropiadamente la
temperatura inicial y la función de decrecimiento, el número de iteraciones, y las
condiciones que nos permitirán considerar que el sistema está ya frío o en condiciones
de parada. También debe tenerse en cuenta la definición del espacio de soluciones, la
función de coste, y cómo se obtendrá la solución inicial. Resultados teóricos basados en
la teoría de las cadenas de Markov han demostrado que con un programa de
enfriamiento infinitamente lento, el algoritmo de recocido convergería al óptimo global
con probabilidad la unidad, según la temperatura tiende a cero. Los detalles pueden ser
consultados en Van Laarhoven y Aarts (1988), y en Aarts y Korst (1989).
Sin embargo, no se puede garantizar esa convergencia en programas de enfriamiento
finitos, y en ese sentido, Van Laarhoven y Aarts han demostrado que para garantizar
llegar a una solución que esté a una distancia arbitrariamente próxima a la óptima, son
necesarios tiempos de computación de tipo exponencial. Hajek (1988) demostró que si
se usa un programa de enfriamiento dado por Tk = Γ ln (1 + k ) , siendo k el número de
iteraciones y Γ la máxima profundidad necesaria para escapar de cualquier óptimo
local (no global), está garantizada una convergencia asintótica al óptimo. Como por lo
general no se conoce el valor Γ , este resultado no tiene utilidad práctica pero da una
idea de cómo la velocidad del programa de enfriamiento debe estar relacionada con las
características del espacio de soluciones.
Dado que uno de los objetivos de cualquier procedimiento robusto de búsqueda es que
la calidad de la solución final sea independiente de la solución inicial de la que se parta,
la temperatura inicial debería ser independiente de la solución inicial. La constante de
Boltzmann debe ser escogida para aceptar casi libremente las soluciones del entorno. En
aquellos problemas que estén bien estructurados, por lo general hay suficiente
IX.-10
información como para estimar este valor. Cuando esto no sea posible, la razón entre
movimientos aceptados y rechazados que dé lugar a un estado inicial aceptablemente
volátil puede ser fijado de antemano, y manipulando apropiadamente la constante de
Boltzmann se puede llegar a alcanzar el valor deseado.
De cualquier forma, es necesaria una labor de determinación (y por tanto de prueba y
error) de los parámetros muy exhaustiva.
IX.-11
3. Velocidad de enfriamiento
La velocidad a la que se produce el enfriamiento es un factor clave en el éxito de la
estrategia. Viene determinado por una parte, por el número de iteraciones que se
ejecutarán a cada temperatura; y por otro, por la velocidad de enfriamiento propiamente
dicha. La teoría sugiere que se debería permitir que el sistema esté cerca de su estado
estacionario correspondiente a la temperatura, antes de reducir ésta; y que además, la
temperatura vaya gradualmente acercándose al valor cero.
A medida que va disminuyendo la temperatura, se debería aumentar el número de
iteraciones para explorar a fondo las soluciones cercanas al óptimo, pero existe una
limitación en el tiempo de computación. Lo mismo ocurre si se elige el grado de
enfriamiento próximo a la unidad. Se debe llegar a un equilibrio entre el número de
exploraciones y el tiempo de computación.
El conjunto de vecinos debe ser lo suficientemente grande como para que el sistema
llegue a alcanzar su estado estacionario para esa temperatura. Generalmente se suele
tomar un valor fijo, aunque puede definirse algún procedimiento que permite decidir
cuando finalizar la iteración y enfriar. El enfriamiento se produce cuando se produce
una de las dos situaciones siguientes; se ha generado un número máximo de vecinos
(MV) o se han aceptado un número máximo de vecinos con éxito (ME). Lógicamente,
el número máximo de vecinos MV tiene que ser mayor que el número máximo de
vecinos con éxito (ME). Un proporción generalmente aceptada suele ser ME = MV/10 .
La secuencia de enfriamiento viene dada por las temperaturas inicial y final (la primera
lógicamente más elevada que la segunda), y las sucesivas temperaturas recorridas para
llegar de una a otra. Una temperatura inicial (o constante de Boltzmann) elevada facilita
la exploración del espacio de configuraciones pues hace que casi todos los saltos de una
configuración a otra estén permitidos. Esto permite al sistema moverse a cualquier
configuración requerida, porque la configuración inicial aleatoria puede estar alejada de
la óptima. Idealmente la temperatura final tras el proceso de enfriamiento parece que
debería ser cero, sin embargo no será necesario llegar a ese extremo, pues cuando la
temperatura se haga lo suficientemente baja, la probabilidad de salto a una
IX.-12
configuración peor será virtualmente nula, con lo que el proceso quedará atrapado en el
mejor óptimo local conseguido hasta el momento y ya no se producirá apenas ninguna
mejora en el resultado alcanzado. Por otra parte, una diferencia muy acusada entre
temperatura inicial y final hará que la ejecución del algoritmo sea demasiado lenta. Si la
temperatura de parada se fija muy baja, se invertirá mucho tiempo de búsqueda en las
fases finales, que seguramente sería mejor aprovechado en temperaturas superiores. Por
el contrario, si la temperatura final se fija en un valor muy alto, es posible que la
búsqueda no consiga alcanzar ningún óptimo local lo cual hace que en la práctica se
tienda a un valor de compromiso. Para lograr un equilibrio adecuado entre todos estos
aspectos no cabe, en general, otra solución que recurrir al ensayo y error. También es
necesario determinar cuál es la secuencia de temperaturas recorridas.
Existen múltiples mecanismos de enfriamiento, de los que los más representativos son:
¾ Enfriamiento basado en sucesivas temperaturas descendentes fijadas por el
usuario.
¾ Enfriamiento con descenso constante de temperatura.
¾ Descenso con una constante proporcional Tk +1 = α ⋅ Tk , k = 1, 2, ...
¾ Criterio de Boltzmann Tk +1 = T0 (1 + log k ) , k = 1, 2, ...
¾ Esquema de Cauchy Tk +1 = T0 (1 + k ) , k = 1, 2, ...
¾ Para controlar el número de iteraciones Tk +1 = Tk (1 + β Tk )
De los esquemas de enfriamiento existentes, dos son especialmente interesantes,
habiendo sido elegidos mayoritariamente por los investigadores. El primero, establece
una velocidad de enfriamiento de la temperatura de tipo geométrico, Tk +1 = α ⋅ Tk con
0 ≤ α < 1 . Las evidencias empíricas han mostrado que valores elevados de α ,
comprendidos entre 0.8 y 0.99 (correspondientes a velocidades lentas de enfriamiento),
son los que mejor resultado proporcionan.
El número de iteraciones en cada temperatura se corresponde generalmente con el
tamaño del problema, variando según desciende la temperatura. Es importante dedicar
suficiente tiempo de búsqueda a temperaturas bajas para garantizar que se visita el
óptimo local.
IX.-13
Según el segundo programa de enfriamiento, propuesto por Lundy y Mees (1986), la
temperatura se reduce a una velocidad muy lenta según la fórmula Tk +1 = Tk (1 + β Tk ) ,
siendo ß un valor positivo muy pequeño.
La velocidad a la que se reduce la temperatura es un punto fundamental a tener en
cuenta, y se ha constatado que tanto el programa geométrico como el de Lundy y Mees
dan resultados similares, cuando el enfriamiento se produce para el mismo rango de
temperaturas y para un número total de iteraciones similares.
A continuación se va a obtener una ecuación que relaciona la temperatura inicial T0, la
temperatura final TM y el número de iteraciones M.
Ti =
Ti − Ti −1 =
Ti −1
1 + βTi −1
Ti −1
Ti −1
− Ti −1 = − βTi −1
= − βTi ⋅ Ti −1
1 + βTi −1
1 + βTi −1
TM − T0 = (TM − TM −1 ) + K + (T1 − T0 ) = − βTM ⋅ TM −1 − K − βT1 ⋅ T0
⎛ T
T
Ti ⋅ Ti −1 = ⎜⎜ i ⋅ K ⋅ M −1 ⋅ TM
TM
⎝ Ti +1
⎞⎛ Ti −1
⎞
T
⎟⎟⎜⎜
⋅ K ⋅ 1 ⋅ T0 ⎟⎟ =
T0
⎠⎝ Ti −2
⎠
= TM ⋅ T0 ⋅ (1 + βTi ) ⋅K ⋅ (1 + βTM −1 ) ⋅
1
1
⋅K ⋅
(1 + βTi −2 ) (1 + βT0 )
Considerando que β << 1 , se puede escribir
Ti ⋅ Ti −1 ≈ TM ⋅ T0
[1 + β (Ti + K + TM −1 )] ≈ T ⋅ T
[1 + β (Ti−2 + K + T0 )] M 0
TM − T0 ≈ − βTM ⋅ T0 ⋅ M
IX.-14
β≈
T0 − TM
TM ⋅ T0 ⋅ M
IX.-15
4. Implementación del algoritmo
Sea S el conjunto de soluciones posibles del sistema (a las que se identifica con los
estados del sistema) y se tiene una función de coste sobre los elementos de S (a la que se
identifica con la energía del sistema). Se quiere encontrar un elemento de S que
minimice la función de coste (análogamente, se trata de encontrar un estado en el cual la
energía del sistema sea mínima). Se asume que los estados del sistema tienen la función
de distribución de probabilidad de Boltzmann.
El algoritmo se divide en etapas. A cada etapa le corresponde una temperatura menor
que la que tenía la etapa anterior (a esto hace referencia la monotonía; después de cada
etapa la temperatura baja, se enfría el sistema). Por lo tanto hace falta un criterio de
cambio de la temperatura (cuanto tiempo hay que esperar en cada etapa para dar lugar a
que el sistema alcance su equilibrio térmico).
En cada problema concreto habrá que determinar cuáles son las variables que describen
adecuadamente la topología del espacio de configuraciones y establecer la manera de ir
saltando aleatoriamente de una configuración a otra.
Se puede establecer un esquema del algoritmo:
1. Generación de una nueva solución.
1.1
Definición del conjunto de vecinos.
1.2
Selección de un elemento de dicho conjunto.
2. Cálculo de la diferencia de costos entre la solución actual y la vecina.
3. Aplicación del criterio de aceptación.
La temperatura inicial T0 se fija a la unidad con lo que se debe ajustar la constante de
Boltzmann para permitir casi (o todo) movimiento; esto es, que el sistema tenga un alto
grado de libertad. Este análisis constituye un problema complejo y se tratará
posteriormente.
IX.-16
Se elige un punto inicial del espacio de soluciones que cumpla las condiciones del
problema y se halla el valor de la función objetivo. En el sistema se debe definir el
tamaño de paso que describe el movimiento que permite saltar de una configuración a
otra. Este tamaño debe ser un orden de magnitud menor que el tamaño característico de
óptimo local y está íntimamente ligado a la suavidad de la función objetivo. Un grado
de discretización excesivamente fino penaliza el rendimiento mientras que un grado de
discretización muy grande va ha hacer que los pasos sean inútiles, ya que no se
consideran soluciones, limitándose el algoritmo a funcionar como un mero explorador
de soluciones. Este hecho condiciona el espacio de soluciones que será capaz de
alcanzar el método.
En todo problema existe una relación entre el espacio de soluciones, el tamaño de paso,
el número de iteraciones a realizar y la velocidad de cálculo del computador. Para un
problema concreto, la velocidad de cálculo del computador condiciona el número de
iteraciones a realizar, por lo que definido el tamaño del paso se tiene el espacio de
soluciones. Evidentemente, para explorar un determinado espacio de soluciones se debe
tomar la solución inicial en ese espacio. Todo esto si el espacio de soluciones es lo
suficientemente extenso, pero puede ocurrir que el espacio de soluciones se encuentre
limitado lo que condiciona el salto de una configuración a otra.
Dado que esta función objetivo se va a asimilar a la energía, se denominará E. La
temperatura T tomará el valor unidad en el instante inicial. Se tomarán dos parámetros
de control a y b, cuyo valor inicial será nulo. Estos valores están relacionados con otros
dos A y B, que la literatura recomienda para sistemas de pequeñas dimensiones, se les
de un valor:
A = 10 * (dimensión del sistema)
B = (dimensión del sistema)
El siguiente valor se obtendría de una forma aleatoria. Para decidir si el siguiente valor
es mejor que el anterior se calcula E.
Si E j +1 ≤ E j , se sustituye la solución al ser un algoritmo de descenso.
IX.-17
Si E j +1 > E j , se recurre al proceso de recocido. Se genera una perturbación aleatoria
llamada p, que es un número real comprendido entre cero y uno, y se calcula la
distribución de probabilidad para una determinada energía:
⎛ ΔE ⎞
⎟⎟
P(ΔE ) = exp⎜⎜ −
⎝ kB ⋅T ⎠
Si P(ΔE ) > p , se acepta la nueva solución; en caso contrario, se desecha.
Para la temperatura se ha tomado la ley de enfriamiento propuesta por Lundy y Mees:
Ti =
Ti −1
1 + βTi −1
La forma de descender la temperatura es la siguiente:
¾ Si se produce innovación, b se incrementa en una unidad y al valor de a se le
asigna cero.
¾ Si no se produce innovación, b se mantiene y a se incrementa en una unidad.
Cuando ocurre que a < A ó b > B, valores prefijados inicialmente, se produce la
innovación en T y al valor de b se le asigna cero. El proceso se repite hasta alcanzar la
condición de parada.
Fijando la temperatura inicial T0, la temperatura final TM, y el número de iteraciones M,
se define ß según la ecuación obtenida anteriormente
β≈
T0 − TM
TM ⋅ T0 ⋅ M
Sin embargo, esta ecuación se ha obtenido descendiendo la temperatura en cada
iteración y la temperatura desciende cuando se cumple la condición a < A ó b > B .
IX.-18
Teniendo en cuenta los valores asignados a A y B, se tiene que A B = 10 con lo que
estadísticamente el descenso de la temperatura ocurrirá con mayor frecuencia cuando se
produzca el suceso B que cuando se produzca el A . A esto hay que añadirle que cuando
no se produzca innovación, b se mantiene y no cambia de valor. Esta complicación
debida a la aleatoriedad del método ha llevado a establecer un argumento aproximado
para la estimación de ß. Si se asume que la temperatura siempre desciende cuando
ocurre el suceso B y como A >> B se puede corregir la expresión anterior:
β ≈ fac
T0 − TM
TM ⋅ T0 ⋅ M
Como la temperatura desciende cuando b > B, el parámetro introducido debe tomar un
cierto valor tal que fac > B . Tomando una cota conservativa, el parámetro ß se puede
escribir
β = (B + 1)
T0 − TM
TM ⋅ T0 ⋅ M
De este modo, se fija la temperatura inicial T0 = 1, la temperatura final TM un cierto
porcentaje de la temperatura inicial tal como 0.1-0.3, el número de iteraciones M, y el
parámetro ß se obtiene de la ecuación anterior. La temperatura final obtenida tras el
proceso de cálculo TF constituye una cota superior de TM, muy cercana a ella, lo cual
impide que la temperatura final alcance un valor nulo lo que provocaría la aparición de
infinitos.
IX.-19
5. Constante de Boltzmann
El punto más importante para que el algoritmo funcione de manera eficaz es la
determinación de la constante de Boltzmann. Si la constante de Boltzmann es muy
grande, P(ΔE ) tiende a la unidad y todos los cambios se aceptan con lo que el
algoritmo pasa a ser un mero explorador de soluciones, pero si la constante de
Boltzmann es muy pequeña, P(ΔE ) tiende a cero y no se acepta ningún cambio, con lo
que se tiene un algoritmo de descenso incapaz de salir de mínimos locales. Un valor
apropiado de la constante de Boltzmann es aquella que permite al algoritmo salir de
óptimos locales para proceder a la búsqueda de otros óptimos mejores.
En el primer momento de la iteración, se tiene la siguiente la ecuación
⎛ ΔE ⎞
⎟⎟
P0 = exp⎜⎜ −
⋅
k
T
⎝ B 0⎠
En concreto, si se retiene únicamente el primer valor de la iteración, se tiene:
kB = −
E0
ln P0 ⋅ T0
Si se retienen los dos primeros valores
kB = −
ΔE
ln P0 ⋅ T0
Parece lógico que un valor apropiado de la constante de Boltzmann es aquella tal que
P(ΔE ) es del orden de 0.5 , a fin de permitir al algoritmo salir de óptimos locales lo
cual establece P0 = 0.5 . Generalmente, el problema es que el valor obtenido para la
constante de Boltzmann en la primera iteración no resulta útil conforme el proceso
avanza. El hecho de considerar una u otra, de las ecuaciones expuestas anteriormente,
no representa gran diferencia. La adecuada elección de la constante de Boltzmann
permite la exploración del espacio de configuraciones en los momentos iniciales, pues
IX.-20
facilita que los saltos de una configuración a otra estén permitidos, pero cuando la
temperatura se hace lo suficientemente baja, la probabilidad de salto a una
configuración peor será prácticamente nula con lo que el proceso quedará atrapado en el
mejor óptimo local.
Esto ha provocado que se haya empleado un método más elaborado consistente en fijar
un valor para la constante de Boltzmann y ejecutar el proceso de iteración un número
fijo de iteraciones, almacenando P(ΔE ) para calcular
)
P=
∑ P(ΔE )
número⋅total ⋅de⋅valores⋅ P ( ΔE )
número ⋅ total ⋅ de ⋅ valores ⋅ P (ΔE )
)
)
Como P ≈ 0.5 y dado que P(k B ) , es posible establecer un método simple que permita
)
encontrar la constante de Boltzmann tal que P sea del orden de 0.5 , ya sea el método
de la bisección, el de la secante, el de Newton, o cualquier otro. Dada la aleatoriedad
que conlleva el método de recocido simulado no se necesita mucha precisión en la
determinación de la constante de Boltzmann siendo un valor suficiente aquel que
)
proporciona P ≈ 0.5 ± 0.1 , aunque si la precisión obtenida es únicamente del 10 %, el
óptimo obtenido se puede considerar válido. El número de iteraciones no debe ser
inferior a treinta aunque para tener una mayor confianza se recomienda un valor entre
cincuenta y cien, si bien cuanto mayor sea este número más seguridad se tendrá en la
localización del óptimo. Como valor inicial para empezar la búsqueda de la constante de
Boltzmann, se puede emplear la ecuación mostrada anteriormente
kB = −
E0
ln P0 ⋅ T0
habiendo encontrado buenos resultados introduciendo P0 = 0.8-0.95 aunque no es una
regla fija. Finalmente, una vez ejecutado el método y localizado el óptimo, una
)
comprobación final es obtener el factor P ≈ 0.5 . En la inmensa mayoría de los casos
analizados, el valor obtenido es satisfactorio.
Un inconveniente que presenta el algoritmo de recocido simulado es que, además del
IX.-21
problema que supone la determinación de la constante de Boltzmann, la variación de
cualquier parámetro conlleva tener que volver a recalcularla. En ocasiones, con una
ligera modificación es suficiente pero en otras es necesario casi empezar desde el
principio.
La experiencia acumulada en este campo permite afirmar que la correcta determinación
de la constante de Boltzmann permite llegar a obtener valores óptimos con una
precisión muy elevada.
IX.-22
6. Condición de parada
La condición de parada determina cuando se llega al equilibrio térmico y finaliza el
algoritmo. En teoría, el algoritmo debería finalizar cuando T = 0. En la práctica, se para
cuando T alcanza un cierto valor final, previamente especificado, o después de cumplir
alguna de las condiciones que se enumeran a continuación.
Una buena opción es parar cuando el número de movimientos aceptados es inferior a un
cierto porcentaje. En ese caso, es muy probable que el algoritmo se haya estancado y no
vaya a mejorar la solución obtenida.
Se van a establecer cuatro condiciones de parada que detienen el algoritmo si se cumple
una cualquiera de ellas.
6.1. Condición 1
Si la solución no ha mejorado tras K1 series consecutivas de L pasos, una cierta cantidad
definida por ∈1 > 0 .
E (K1 ⋅ L + n ) > E (n ) ⋅ (1+ ∈1 ) ⇒ FIN
Lundy (1985) se ha basado en este criterio, demostrando que el número de iteraciones
para llegar a la temperatura final es polinomial.
6.2. Condición 2
Si el número de movimientos aceptados en K2 series consecutivas de L pasos, es inferior
que ∈2 ⋅L ⇒ FIN , con ∈2 > 0 .
6.3. Condición 3
Si la temperatura desciende por debajo de la temperatura final.
IX.-23
6.4. Condición 4
Si el número de iteraciones alcanza un valor superior al valor máximo establecido M.
IX.-24
7. Cálculo del siguiente paso
El siguiente valor se obtendría de una forma aleatoria. Hay investigadores que proponen
que se modifiquen todas las componentes del vector de estado, de forma que sean
aleatorias puras, aunque también se pueden modificar solamente algunas de ellas. Para
estudiar este fenómeno se va a calcular un problema tipo con diferentes
configuraciones, y se van a comparar las soluciones obtenidas.
Así, se van a localizar los factores de ajuste de un problema balístico para un proyectil
base burn, empleando el método 1 del Modelo Modificado de Masa Puntual. Utilizando
el algoritmo de recocido simulado se van a determinar los cuatro factores de ajuste tDI,
K(p) (función lineal) y f(iBB,MT) para un ángulo de tiro concreto. Se ha escogido para
ello el proyectil OE155F2RTC FR HEA BB1, disparado desde un tubo 155AUF1 con
una carga C7, por ser un proyectil muy estudiado del que se dispone abundante
información calculada mediante el método 1. Dado que en este algoritmo la velocidad
de cálculo es muy importante para obtener resultados de forma rápida, se ha recurrido al
método 1 por permitir una mayor velocidad en la computación. Inicialmente, se
realizaron una serie de cálculos empleando un ángulo de tiro de 300 milésimas pero se
ha podido comprobar que la dispersión de resultados aumenta en la medida que se
emplean ángulos de tiro superiores. Posteriormente, se podrá ver que para mejorar el
proceso de optimización del algoritmo, interesa tener una mayor dispersión en los
resultados que permitan ver claramente las diferencias de una configuración a otra. De
igual forma, se ha escogido la carga más elevada por presentar una mayor dispersión en
los datos obtenidos. Aumentando el ángulo de tiro, se han encontrando muy pocas
diferencias entre 700 y 900 milésimas por lo que finalmente los cálculos se han
efectuado con un ángulo de tiro de 700 milésimas, al objeto de evitar efectos asociados
al segundo sector que podrían enmascarar y confundir los resultados obtenidos, y
también para reducir el tiempo de cálculo.
Para cada carga, de los cuatro factores de ajuste, únicamente el factor base burn
f(iBB,MT) es función del ángulo de tiro siendo el tiempo de retraso a la ignición del
motor base burn tDI función de la temperatura de propulsante del motor MT, y el factor
de quemado con la velocidad de rotación axial del proyectil K(p) una función lineal de
IX.-25
la velocidad de rotación axial del proyectil p. En este momento se va a trabajar con un
único ángulo de tiro y no es de aplicación pero se debe tener en cuenta que mientras que
f(iBB,MT) es función del ángulo de tiro, tDI y K(p) no lo son.
Obtenido el alcance y la deriva de experiencias realizadas, se van a calcular los factores
de ajuste tDI, K(p) y f(iBB,MT) que mejor aproximen el alcance y la deriva. Se han
escogido estos parámetros por ser los más representativos del tiro de artillería. La
adición a los anteriores de la ordenada máxima ha permitido constatar un
empeoramiento en el cálculo de los factores de ajuste. Si se obtienen unos factores de
ajuste que mejor ajusten alcance y deriva y unos segundos factores de ajuste que mejor
ajusten alcance, deriva y ordenada máxima; se ha observado que si se calcula alcance y
deriva con los segundos factores de ajuste, se obtienen peores valores que usando los
primeros factores de ajuste. Esto es debido a que la ordenada máxima es un parámetro
que ante variaciones en los factores de ajuste, experimenta variaciones mucho mayores
que las apreciadas en alcance y deriva. En concreto, las variaciones en la ordenada
máxima pueden llegar a ser del orden de diez veces superiores a las encontradas para
alcance y deriva. También se ha constatado la dificultad por parte del Modelo
Modificado de Masa Puntual de proporcionar valores acertados de la ordenada máxima,
una vez ajustada la deriva y el alcance, con datos extraídos de experiencias reales.
Finalmente, se ha optado por ajustar únicamente alcance y deriva.
Si a través de experiencias realizadas se obtiene el alcance y la deriva, que se designaran
como alcanceexp y derivaexp, se define la función objetivo como:
E=
(alcance − alcance ) + (deriva − deriva )
2
exp
2
exp
siendo los términos alcance y deriva los obtenidos como resultado de haber realizado
todo el proceso de cálculo en función de los factores de ajuste tDI, K(p) y f(iBB,MT). Una
característica muy importante de este problema es que se conoce, a priori, el valor
óptimo buscado de la función objetivo. Como condiciones iniciales, se considera que
para el tiempo de retraso a la ignición del motor base burn tDI se introducirá el valor
correspondiente, en el supuesto de que se conozca. Si no se dispone de información
adicional, se considerará tDI = 0 siendo el resto de valores K(p) = 1 y f(iBB,MT) = 1 .
IX.-26
Como ya se comentó anteriormente, el algoritmo de integración utilizado ha sido el
Runge Kutta 45. Los parámetros eRK, hmin y hmax se han elegido para obtener una
precisión inferior a un metro en el cálculo de la deriva y el alcance: hmin = 0.04 s, hmax =
6.0 s y eRK = 0.1 .
Se ha considerado apropiada para este problema la siguiente condición de parada; L =
100, K1 = 4, ∈1 = 0.5 , K2 = 4, ∈2 = 0.5 y M = 1000. En el peor de los casos, cada proceso
de cálculo independiente finaliza cuando se alcanza el número máximo de iteraciones
M, que teniendo en cuenta el tiempo de ejecución de ordenador, se ha considerado
suficiente fijarlo en 1000. A fin de comprobar la calidad de los resultados obtenidos se
va a establecer un sistema en el cual, tras alcanzar la condición de parada y extraer el
óptimo correspondiente, se va a continuar calculando hasta volver a alcanzar una nueva
condición de parada con su correspondiente nuevo óptimo, y así sucesivamente. Así, se
han ejecutado veinte de estos procesos de cálculo diferentes, comprobando como
cuando el algoritmo alcanza el óptimo puede hacerlo con diferentes valores de factores
de ajuste; es decir, aunque el valor del óptimo sea muy similar, existen diferentes
combinaciones de los factores de ajuste que alcanzan ese valor del óptimo. A fin de
investigar este fenómeno, se ha considerado realizar otros diez procesos de cálculo
fijando tDI = 0 , no obteniendo grandes diferencias con respecto al caso anterior.
Finalmente, se han calculado otros diez procesos de cálculo fijando tDI = 0 y K(p) una
función constante, sin considerar la dependencia con la velocidad de rotación axial del
proyectil p, mostrando estos últimos resultados, como en los diez procesos de cálculo se
ha alcanzado aproximadamente el mismo óptimo con similares factores de ajuste.
Resumiendo, se ha establecido un número de procesos cálculo de cuarenta, los cuales se
utilizaran posteriormente a efectos de valorar los resultados proporcionados por el
algoritmo.
A partir del valor inicial es necesario definir el tamaño de paso para cada una de las
variables, que permita saltar de una configuración a otra. Con carácter general, este paso
se ha definido como
Δ = f esc ⋅ Pre ⋅ T ⋅ Rnd ⋅10
IX.-27
siendo fesc el factor de escala, Pre la precisión, T la temperatura y Rnd un número
aleatorio.
Este tamaño de paso debe ser un orden de magnitud menor que el tamaño característico
de óptimo local. Un tamaño mayor no permitirá al algoritmo funcionar como algoritmo
de optimización convirtiéndose, en un mero explorador de soluciones. Esta es la idea
inherente al introducir el parámetro precisión. En este problema se ha encontrado una
buena aproximación para Pre = 10e-4 .
Este tamaño puede ser diferente dependiendo de la variable a la que vaya a afectar ya
que la escala de cada una de las dimensiones no tiene porque ser la misma. Esto
conlleva a que es necesario definir el factor de escala que afecta a cada una de las
variables.
En cada iteración se va reduciendo la temperatura y por tanto las probabilidades son
cada vez más pequeñas conforme avanza el procedimiento y se acerca a la solución
óptima, con lo que el tamaño del paso también disminuye. Inicialmente se realiza una
diversificación de la búsqueda sin controlar demasiado el coste de las soluciones
visitadas. Cuando la temperatura se haga lo suficientemente baja la probabilidad de
salto a una configuración peor será prácticamente nula, con lo que el proceso quedará
atrapado en el mejor óptimo local conseguido hasta el momento y el tamaño de paso
será muy pequeño.
Para obtener el siguiente valor es necesario modificar alguna de las componentes del
vector de estado. Un método clásico de hacer esto es tomar el vector de estado, que en
este caso tiene cuatro componentes; tDI, K(p) y f(iBB,MT), realizar un sorteo entre todas
ellas y decrementar la elegida una cantidad dada Δ , con Rnd comprendido entre 0 y 1
.A continuación se realiza un nuevo sorteo entre las componentes restantes, que no han
variado, y se incrementa la elegida un nuevo valor Δ , con Rnd comprendido entre 0 y 1
. Esto permite conocer la calidad de soluciones que puede proporcionar el algoritmo y
comparar con otro método para obtener el siguiente valor, como puede ser elegir
aleatoriamente una componente del vector de estado y adicionarle a ésta una cantidad
dada Δ , con Rnd comprendido entre -1 y 1 .
IX.-28
En las siguientes gráficas se van a comparar las dos configuraciones descritas
anteriormente, mostrando alcance y deriva. Se ha designado como SA2 aquella que
modifica dos componentes del vector de estado y SA1 aquella que modifica una sola
componente. Definiendo el área existente entre el valor calculado y el valor exacto para
SA2 y SA1, y calculando la diferencia entre las dos áreas, puede estimarse que valor
calculado se acerca más al valor exacto. Las gráficas de alcance y deriva muestran como
es posible obtener valores realmente próximos al valor buscado, encontrándose
precisiones del orden de un metro.
IX.-29
Otra opción es modificar todas las componentes del vector de estado adicionando a cada
una de ellas una cantidad dada Δ , con Rnd comprendido entre -1 y 1, y compararla con
la descrita anteriormente que modifica únicamente dos componentes del vector de
estado. Se ha designado SA2 aquella que modifica dos componentes del vector de
estado y SA4 aquella que modifica todas las componentes.
Un problema observado cuando se modifican todas las componentes, es que una vez
introducida la constante de Boltzmann, ejecutado el método y localizado el óptimo, se
)
)
pasa a comprobar el factor P encontrándose que en algunas ocasiones P resultaba del
orden de 0.99 , como es el caso del punto número 11 de la iteración donde puede
observarse un error enorme. Este punto se ha incluido a efectos de observar lo que
ocurre cuando la constante de Boltzmann no se ha elegido apropiadamente. El problema
es que esto ha ocurrido sobre un 15 % de las veces aunque en la gráfica solo se ha
incluido en el punto número 11. Este inconveniente se agudiza al aumentar el tamaño
del vector de estado. Así, se puede afirmar que el efecto de modificar todas las
componentes del vector de estado provoca una mayor dificultad en la determinación de
la constante de Boltzmann.
IX.-30
IX.-31
Una cuestión que podría plantearse es que ocurriría si solo se retienen aquellos puntos
)
tales que P ≈ 0.5 . En este caso, el alcance ha salido ligeramente superior para SA4
mientras que la deriva resulta algo mejor para SA2. La dificultad en la determinación de
la constante de Boltzmann supone un grave inconveniente añadido y la mejora obtenida
solo se ha manifestado muy levemente en la determinación del alcance, por lo que el
efecto de modificar todas las componentes del vector de estado supone más un
inconveniente que una ventaja.
IX.-32
Como resumen, se puede afirmar que este algoritmo requiere una labor de
determinación (y por tanto de prueba y error) muy exhaustiva de los parámetros.
IX.-33
IX.-34
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO X
ALGORITMOS GENÉTICOS
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
X.-1
X.-2
X.-ALGORITMOS GENÉTICOS
1. Índice
1. Índice
2. Introducción
3. Definición
4. Codificación
5. Selección
6. Mutación
7. Cruce
8. Reducción
9. Población
10. Condición de parada
11. Implementación del algoritmo
X.-3
X.-4
2. Introducción
Esta técnica se basa en los mecanismos de selección que utiliza la naturaleza, de
acuerdo a los cuales los individuos más aptos de una población son los que sobreviven,
al adaptarse más fácilmente a los cambios que se producen en su entorno. Hoy en día se
sabe que estos cambios se efectúan en los genes de un individuo (unidad básica de
codificación de cada uno de los atributos de un ser vivo), y que sus atributos más
deseables (los que le permiten adaptarse mejor a su entorno) se transmiten a sus
descendientes cuando éste se reproduce sexualmente.
Una definición bastante completa de un algoritmo genético es la propuesta por Koza:
"Es un algoritmo matemático altamente paralelo que transforma un conjunto de objetos
matemáticos individuales con respecto al tiempo usando operaciones modeladas de
acuerdo al principio Darwiniano de reproducción y supervivencia del más apto, y tras
haberse presentado de forma natural una serie de operaciones genéticas de entre las que
destaca la recombinación sexual. Cada uno de estos objetos matemáticos suele ser una
cadena de caracteres (letras o números) de longitud fija que se ajusta al modelo de las
cadenas de cromosomas, y se les asocia con una cierta función matemática que refleja
su aptitud. "
Los primeros desarrollos en el campo de los algoritmos genéticos aparecieron a finales
de los cincuenta y principios de los sesenta, programados en computadoras por biólogos
evolutivos que buscaban explícitamente realizar modelos de aspectos de la evolución
natural. En 1962, investigadores como Box, Friedman, Bledsoe y Bremermann habían
desarrollado independientemente algoritmos inspirados en la evolución para
optimización de funciones, pero sus trabajos generaron poca reacción. En 1965,
Rechenberg de la Universidad Técnica de Berlín introdujo una técnica que él denominó
estrategia evolutiva. En esta técnica no había población ni cruzamiento; un padre
mutaba para producir un descendiente, y se conservaba el mejor de los dos,
convirtiéndose en el padre de la siguiente ronda de mutación. Versiones posteriores
introdujeron la idea de población.
X.-5
En 1966, Fogel, Owens y Walsh introdujeron una técnica que llamaron programación
evolutiva. En este método, las soluciones candidatas para los problemas se
representaban como máquinas de estado finito. Al igual que en la estrategia evolutiva de
Rechenberg, su algoritmo funcionaba mutando aleatoriamente una de estas máquinas
simuladas y conservando la mejor de las dos. Sin embargo, todavía faltaba introducir la
idea de cruce.
En 1962, el trabajo de Holland sobre sistemas adaptativos estableció las bases para
desarrollos posteriores, y fue el primero en proponer explícitamente el cruce y otros
operadores de recombinación. El trabajo fundamental en el campo de los algoritmos
genéticos apareció en 1975, con la publicación del libro “Adaptación en Sistemas
Naturales y Artificiales”. Basado en investigaciones y artículos anteriores del propio
Holland y de colegas de la Universidad de Michigan, este libro fue el primero en
presentar la mutación, la selección y el cruce, simulando el proceso de la evolución
biológica como estrategia para resolver problemas.
Al principio, estas aplicaciones eran principalmente teóricas. Sin embargo, al seguir
proliferando la investigación, los algoritmos genéticos se aplicaron en otros sectores en
la medida que los ordenadores incrementaban su potencia de cálculo. Actualmente, la
computación evolutiva es un campo emergente, y los algoritmos genéticos están
resolviendo problemas de interés. No hay más que recordar las palabras de Charles
Darwin: “que el azar en la variación, junto con la ley de la selección, es una técnica de
resolución de problemas de inmenso poder y de aplicación casi ilimitada”.
X.-6
3. Definición
Los algoritmos genéticos (GA´s) son métodos adaptativos que pueden usarse para
resolver problemas de búsqueda y optimización. Están basados en el proceso genético
de los organismos vivos. A lo largo de las generaciones, las poblaciones evolucionan en
la naturaleza de acuerdo con los principios de la selección natural y supervivencia de los
más aptos, postulados por Darwin, donde solo los mejor adaptados tienen mayores
posibilidades de reproducirse. Por imitación de este proceso, los algoritmos genéticos
son capaces de ir creando soluciones para problemas del mundo real. Dado un problema
específico a resolver, la entrada del GA es un conjunto de soluciones potenciales a ese
problema, codificadas de alguna manera, y una métrica llamada función de aptitud que
permite evaluar cuantitativamente a cada candidata. Estas candidatas pueden ser
soluciones que ya se sabe que funcionan, con el objetivo de que el GA las mejore, pero
que suelen generarse aleatoriamente.
Inmediatamente, el GA evalúa cada candidata de acuerdo con la función de aptitud. En
el conjunto de candidatas, generadas aleatoriamente, la mayoría no funcionarán en
absoluto, y serán eliminadas. Sin embargo, algunas pueden resultar interesantes o
pueden mostrar actividad, aunque sólo sea actividad débil e imperfecta, hacia la
solución del problema. Estas candidatas prometedoras se conservan y se les permite
reproducirse. Se realizan múltiples copias de ellas, pero las copias no son perfectas; se
introducen cambios aleatorios durante el proceso de copia. Luego, esta descendencia
digital prosigue con la siguiente generación, formando un nuevo conjunto de soluciones
candidatas, y son sometidas a una ronda de evaluación de aptitud. Las candidatas que
han empeorado o no han mejorado con los cambios en su código son eliminadas otra
vez; pero, de nuevo, las variaciones aleatorias introducidas en la población pueden
haber mejorado a algunos individuos, convirtiéndolos en mejores soluciones del
problema, más completas o más eficientes. Nuevamente, se seleccionan y copian estos
individuos vencedores hacia la siguiente generación con cambios aleatorios, y el
proceso se repite. Las expectativas son que la aptitud media de la población se
incrementará en cada ronda y, por tanto, repitiendo este proceso cientos o miles de
rondas, pueden descubrirse soluciones muy buenas del problema.
X.-7
Los algoritmos genéticos han demostrado ser una estrategia enormemente poderosa para
resolver problemas, demostrando de manera espectacular el poder de los principios
evolutivos. Aunque no se garantiza que el algoritmo genético encuentre la solución
óptima del problema, se encuentran soluciones de un nivel aceptable en un tiempo
competitivo comparado con otros algoritmos.
Una particularidad de los algoritmos genéticos es que son paralelos. La mayoría de los
otros algoritmos son serie y sólo pueden explorar el espacio de soluciones hacia una
solución en una dirección al mismo tiempo, y si la solución que descubren resulta
subóptima, no se puede hacer otra cosa que abandonar todo el trabajo hecho y empezar
de nuevo. Sin embargo, dado que los GA´s tienen descendencia múltiple, pueden
explorar el espacio de soluciones en múltiples direcciones a la vez. Si un camino resulta
ser poco útil, se puede eliminar fácilmente y continuar el trabajo en otras direcciones.
Esta idea puede verse desde otro punto de vista. Considérese el concepto de esquema o
patrón que describe un conjunto cromosomas. Para ser preciso un esquema es una
cadena compuesta de ceros, unos y asteriscos. Cada esquema representa al conjunto de
cromosomas que contienen los ceros y los unos en la misma posición en la que se
encuentran en el esquema y cualquier valor en la posición de los asteriscos. Sean todas
las cadenas binarias (cadenas de ceros y unos) de n dígitos que forman un espacio de
búsqueda, que puede representarse como ******** (donde * significa 0 o 1). La cadena
01101010 es un miembro de este espacio pero también es un elemento del espacio
0*******, del espacio 01******, del espacio 0******0, del espacio 0*1*1*1*, del
espacio 01*01**0, etc. Evaluando esta cadena concreta, un algoritmo genético estaría
explorando cada uno de los espacios a los que pertenece. Tras muchas evaluaciones, iría
obteniendo un valor cada vez más preciso de la aptitud media de cada uno de estos
espacios, cada uno de los cuales contiene muchos elementos. Por tanto, un algoritmo
GA que evalúe explícitamente un número pequeño de individuos, está evaluando
implícitamente un grupo de individuos mucho más grande. Este concepto se conoce
como teorema del esquema en el campo de los algoritmos evolutivos.
Debido al paralelismo que les permite evaluar implícitamente muchos esquemas a la
vez, los algoritmos genéticos funcionan particularmente bien resolviendo problemas
cuyo espacio de soluciones potenciales es muy amplio como para hacer una búsqueda
X.-8
exhaustiva en un tiempo razonable. La mayoría de los problemas que caen en esta
categoría se conocen como no lineales. En un problema lineal, la aptitud de cada
componente es independiente, por lo que cualquier mejora en alguna parte dará como
resultado una mejora en el sistema completo. La no linealidad es más habitual en la vida
real, donde cambiar una componente puede tener efectos en todo el sistema, y donde
cambios múltiples que por separado son perjudiciales, en combinación pueden conducir
hacia mejoras en la aptitud.
Los algoritmos genéticos son especialmente útiles en problemas con un paisaje
adaptativo complejo, aquéllos en los que la función de aptitud es discontinua, ruidosa,
cambia con el tiempo, o tiene muchos óptimos locales. La mayoría de los problemas
reales tienen un espacio de soluciones enorme que es imposible de explorar
exhaustivamente. En este caso, se deben tener herramientas que sean capaces de obviar
los óptimos locales y no quedar atrapados en ellos, para acometer la búsqueda del
óptimo global.
El cruce es el factor esencial de los algoritmos genéticos. Sin el cruce, cada solución
individual explora el espacio de búsqueda sin información de lo que el resto de
individuos puedan haber descubierto. El cruce permite transmitir información entre los
mejores individuos para producir una descendencia que tenga las virtudes de sus padres
y ninguna de sus debilidades.
En ocasiones es necesario modelizar un problema en términos de múltiples objetivos.
Los GA´s presentan una estructura que se adapta muy bien a estos problemas donde una
solución optimiza un parámetro y otra optimiza otro distinto. Cuando una solución
particular a un problema, con múltiples objetivos, optimiza un parámetro pero ese
parámetro no puede mejorarse más sin causar una pérdida de calidad en otro parámetro,
esa solución se denomina óptimo paretiano o no dominado.
Al crear un algoritmo genético se debe realizar una representación del problema.
Aunque se pueden idear diferentes formas de hacer esto, lo más común es definir a los
individuos como cadenas de números binarios, enteros o reales; donde cada número
representa algún aspecto determinado de la solución. Si los individuos son cadenas
binarias, un 0 o 1 podría significar la ausencia o presencia de una cierta característica. Si
X.-9
son listas de números, estos números podrían representar diferentes cosas. Así, la
mutación implica cambiar estos números, cambiar bits o sumar o restar valores
aleatorios.
La definición de la función de aptitud debe ser analizada cuidadosamente para conseguir
una mejora en la resolución del problema en cuestión. Si se elige mal la función de
aptitud o se define de manera inexacta, puede que el algoritmo genético sea incapaz de
encontrar una solución al problema, o puede acabar resolviendo un problema
equivocado. El algoritmo genético únicamente maximiza, pero la minimización puede
realizarse fácilmente utilizando el recíproco de la función maximizante.
Además de elegir bien la función de aptitud, también deben elegirse cuidadosamente los
otros parámetros de un GA; el tamaño de la población, el ritmo de mutación, el cruce y
el tipo de selección. Si el tamaño de la población es demasiado pequeño, puede que el
algoritmo genético no explore suficientemente el espacio de soluciones para encontrar
buenas soluciones consistentemente. Si el ritmo de cambio genético es demasiado alto o
el sistema de selección se escoge inadecuadamente, puede alterarse el desarrollo de
esquemas beneficiosos y la población cambia demasiado deprisa antes de que la
selección llegue a producir convergencia.
Si el tamaño de una población es pequeño, los ritmos de mutación son muy altos o la
presión selectiva es demasiado fuerte (una situación así podría ser resultado de un
cambio ambiental drástico), entonces la especie puede extinguirse. La solución ha sido
la evolución de la evolutividad, las adaptaciones que alteran la habilidad de una especie
para adaptarse. La mayoría de los seres vivos comprueba y corrige errores, a nivel
celular, durante el proceso de replicación del ADN, manteniendo su ritmo de mutación a
unos niveles aceptablemente bajos. En otro sentido; en tiempos de fuerte presión
ambiental, algunas especies de bacterias entran en un estado de hipermutación en el que
el ritmo de errores en la replicación del ADN aumenta bruscamente, aumentando la
probabilidad de que se descubra una mutación compensatoria.
Un problema que puede surgir con un GA se conoce como convergencia prematura (los
biólogos la llaman deriva genética). Si un individuo, que es más apto que la mayoría de
sus competidores, emerge muy pronto en el curso de la ejecución, se puede reproducir
X.-10
tan abundantemente que merme la diversidad de la población demasiado pronto,
provocando que el algoritmo converja hacia el óptimo local que representa ese
individuo, en lugar de rastrear el paisaje adaptativo lo bastante a fondo para encontrar el
óptimo global. Esto es un problema especialmente común en las poblaciones pequeñas,
donde incluso una variación aleatoria en el ritmo de reproducción puede provocar que
un genotipo se haga dominante sobre los otros. Los métodos más comunes
implementados por los investigadores en GA´s para solucionar este problema implican
controlar la fuerza selectiva para no proporcionar tanta ventaja a los individuos
excesivamente aptos. La selección escalada, por rango o por torneo, son tres de los
métodos principales para conseguir esto. Algunos métodos de selección escalada son el
escalado sigma, en el que la reproducción se basa en una comparación estadística de la
aptitud media de la población y la selección obtenida por la función de Boltzmann, en la
que la fuerza selectiva aumenta durante la ejecución controlando de una manera similar
a como lo hace la variable temperatura en el recocido simulado.
X.-11
4. Codificación
Los individuos (posibles soluciones del problema), pueden representarse como un
conjunto de parámetros (que se denominan genes), los cuales agrupados forman un
conjunto de valores (a menudo referida como cromosoma). El conjunto completo de
material genético se denomina genoma. La evolución es un proceso que opera a nivel de
cromosomas y no a nivel de individuos. Cada individuo es codificado como un conjunto
de cromosomas por lo que se necesita un método para codificar las soluciones
potenciales del problema, de forma que un ordenador pueda procesarlos. Un enfoque
común es codificar las soluciones como cadenas binarias: secuencias de 1s y 0s, donde
el dígito de cada posición representa el valor de algún aspecto de la solución. Otro
método similar consiste en codificar las soluciones como cadenas de enteros o números
decimales, donde cada posición, de nuevo, representa algún aspecto particular de la
solución. Este método permite una mayor precisión y complejidad que el método
comparativamente restringido de utilizar sólo números binarios, y a menudo está
intuitivamente más cerca del espacio de problemas; sin embargo, la teoría en la que se
fundamentan los algoritmos genéticos se comprende mejor desde un punto de vista
binario. Un tercer método consiste en representar a los individuos de un GA como
cadenas de letras, donde cada letra, otra vez, representa un aspecto específico de la
solución. Esta técnica se ha usado para generar redes neuronales.
La virtud de estos tres métodos es que facilitan la definición de los operadores que
provocan los cambios aleatorios en los candidatos seleccionados: cambiar un 0 por un 1
o viceversa, sumar o restar al valor de un número una cantidad elegida al azar, o
cambiar una letra por otra. Otra estrategia, desarrollada principalmente por Koza y
denominada programación genética, representa a los programas como estructuras de
datos ramificadas llamadas árboles. En este método, los cambios aleatorios pueden
generarse cambiando el operador o alterando el valor de un cierto nodo del árbol, o bien
sustituyendo un subárbol por otro.
En términos biológicos, el conjunto de parámetros representando un cromosoma
particular se denomina fenotipo. El fenotipo contiene la información requerida para
construir un organismo, el cual se refiere como genotipo. Los mismos términos se
X.-12
utilizan en el campo de los algoritmos genéticos. La adaptación al problema de un
individuo depende de la evaluación del genotipo que puede obtenerse a partir del
fenotipo. La función de adaptación debe ser diseñada para cada problema de manera
específica. Dado un cromosoma particular, la función de adaptación le asigna un
número real, que se supone refleja el nivel de adaptación al problema del individuo
representado por ese cromosoma.
X.-13
5. Selección
Durante la fase reproductiva se seleccionan los individuos de la población para cruzarse
y producir descendientes, que constituirán, una vez mutados, la siguiente generación de
individuos. Una vez seleccionados los padres (generalmente dos), sus cromosomas se
combinan utilizando habitualmente los operadores de cruce y mutación.
Un algoritmo genético puede utilizar muchas técnicas diferentes para seleccionar a los
individuos que deben copiarse hacia la siguiente generación, pero abajo se indican
algunos de los más comunes. Algunos de estos métodos son mutuamente exclusivos,
pero otros pueden utilizarse en combinación.
¾ Selección elitista: los miembros más aptos de cada generación son seleccionados
(La mayoría de los GA´s no utilizan elitismo puro, sino que usan una forma
modificada por la que el individuo mejor, o algunos de los mejores, son
copiados hacia la siguiente generación, en caso de que no surja nada mejor).
Esta técnica tiene el problema de que no permite al algoritmo salir de óptimos
locales para buscar óptimos globales.
¾ Selección proporcional a la aptitud: los individuos más aptos tienen más
probabilidad de ser seleccionados, pero no la certeza.
¾ Selección por rueda de ruleta: forma de selección proporcional a la aptitud en la
que la probabilidad de que un individuo sea seleccionado es proporcional a la
diferencia entre su aptitud y la de sus competidores. Conceptualmente, esto
puede representarse como un juego de ruleta; cada individuo obtiene una sección
de la ruleta, pero los más aptos obtienen secciones mayores que las de los menos
aptos. Luego la ruleta se hace girar y cada vez se elige el individuo que posea la
sección en la que se para la ruleta.
¾ Selección escalada: al incrementarse la aptitud media de la población, la fuerza
de la presión selectiva también aumenta y la función de aptitud se hace más
discriminadora. La técnica propuesta por Goldberg traza una recta entre el
X.-14
menor valor de aptitud y el mayor valor de aptitud de la población, y luego
prolonga o trunca los valores de aptitud de cada individuo al valor de la recta
que le corresponda. Este método puede ser útil para seleccionar más tarde,
cuando todos los individuos tengan una aptitud relativamente alta y sólo les
distingan pequeñas diferencias en la aptitud.
¾ Selección por torneo: se eligen subgrupos de individuos de la población al azar,
y los miembros de cada subgrupo compiten entre ellos en un torneo del que
resultará ganador el que tenga la mejor aptitud. Sólo se elige a un individuo de
cada subgrupo para la reproducción. Generalmente, suele inferirse un torneo
binario.
¾ Selección por rango: a cada individuo de la población se le asigna un rango
numérico basado en su aptitud y la selección se basa en este ranking, en lugar de
las diferencias absolutas en aptitud. La ventaja de este método es que puede
evitar que individuos muy aptos ganen dominancia al principio a expensas de los
menos aptos, lo que reduciría la diversidad genética de la población y podría
obstaculizar la búsqueda de una solución aceptable.
¾ Selección generacional: la descendencia de los individuos seleccionados en cada
generación se convierte en toda la siguiente generación. No se conservan
individuos entre generaciones.
¾ Selección por estado estacionario: la descendencia de los individuos
seleccionados en cada generación vuelven al conjunto genético preexistente,
reemplazando a algunos de los miembros menos aptos de la siguiente
generación. Se conservan algunos individuos entre generaciones.
¾ Selección jerárquica: los individuos atraviesan múltiples rondas de selección en
cada generación. Las evaluaciones de los primeros niveles son más rápidas y
menos discriminatorias mientras que los que sobreviven hasta niveles más altos
son evaluados más rigurosamente. La ventaja de este método es que reduce el
tiempo total de cálculo al utilizar una evaluación más rápida y menos selectiva
para eliminar a la mayoría de los individuos que se muestran poco o nada
X.-15
capacitados, y sometiendo a una evaluación de aptitud más rigurosa y
computacionalmente más costosa sólo a los que sobreviven a esta prueba inicial.
Una dificultad en el comportamiento del algoritmo genético puede ser la existencia de
gran cantidad de óptimos locales, así como el hecho de que el óptimo global se
encuentre muy aislado.
Un problema habitual en las ejecuciones de los algoritmos genéticos surge debido a la
velocidad con la que el algoritmo converge. En algunos casos la convergencia es muy
rápida lo que suele denominarse convergencia prematura, en la cual el algoritmo
converge hacia óptimos locales mientras que en otros casos el problema es justo el
contrario; es decir, se produce una convergencia lenta del algoritmo. El problema de la
convergencia prematura surge a menudo cuando la selección de individuos se realiza de
manera proporcional a su función objetivo. En tal caso, pueden existir individuos con
una adaptación al problema muy superior al resto, que a medida que el algoritmo avanza
dominan a la población y acaban con la diversidad genética del problema. Se debe
efectuar algún tipo de artificio para que dichos superindividuos no lleguen a dominar a
la población o lo que es lo mismo salir del óptimo local para encontrar otros óptimos
que faciliten la localización del óptimo global.
La función de selección de padres más utilizada es la denominada función de selección
proporcional a la función objetivo, en la cual cada individuo tiene una probabilidad de
ser seleccionado como padre proporcional al valor de su función objetivo. Esto coincide
generalmente con la suposición de que si en el conjunto generado, la aptitud de cada
individuo viene dada por la función objetivo, los individuos con un valor mayor de la
función objetivo tienen más probabilidad de ser seleccionados para el cruce.
Denominando E a la función objetivo y λ el número de individuos que constituyen la
población, la probabilidad de que el individuo j sea seleccionado como padre es:
pj =
Ej
λ
∑E
j =1
X.-16
j
Esta función de selección es invariante ante un cambio de escala, pero no ante una
traslación.
Una de las maneras de superar el problema relacionado con la rápida convergencia
proveniente de los superindividuos, que surge al aplicar la anterior función de selección,
es efectuar la selección proporcional al rango del individuo, con lo cual se produce una
repartición más uniforme de la probabilidad de selección. Los individuos de la
población han sido ordenados de menor a mayor; es decir, al peor individuo se le asigna
el rango uno mientras que el individuo con mejor función objetivo tiene rango el
número de individuos de la población, y la probabilidad de que un individuo sea
seleccionado como padre cuando la selección se efectúa proporcional al rango del
individuo, se tiene como
pj =
rango(E j )
λ (λ + 1) 2
La suma de los rangos, λ (λ + 1) 2 constituye la constante de normalización. La función
de selección basada en el rango es invariante frente a translaciones y a cambios de
escala.
Cuando las probabilidades de selección varían de generación a generación (por ejemplo,
la selección proporcional a la función objetivo), es lo que se denominan métodos de
selección dinámicos frente a métodos de selección estáticos, en los cuales dichas
probabilidades permanecen constantes (por ejemplo, la selección basada en rangos).
Otro posible refinamiento es el modelo de selección del valor esperado, el cual
)
)
introduce un contador cj inicializado en E j E (t ) siendo E (t ) la media de la función
objetivo en la generación t. Cada vez que el individuo resulta seleccionado para el
cruce, dicho contador decrece en una cantidad Δc , con Δc ∈ [0.1,0.5] . El individuo en
cuestión dejará de poder ser seleccionado cuando su contador sea negativo. La
dificultad de este método es la elección del valor del contador que además puede ser
diferente de unos individuos a otros.
X.-17
Si se asegura que todos los individuos tienen asignada una probabilidad de selección
distinta de cero, el método de selección se denomina preservativo. En caso contrario se
denomina extintivo.
X.-18
6. Mutación
Una vez que la selección ha elegido a los individuos aptos, éstos deben ser alterados
aleatoriamente con la esperanza de mejorar su aptitud para la siguiente generación.
Existen dos estrategias básicas para llevar esto a cabo.
La primera y más sencilla se llama mutación. En la naturaleza, una mutación es un
suceso bastante poco común (sucede aproximadamente una de cada mil replicaciones).
En la mayoría de los casos las mutaciones son letales, pero en promedio, contribuyen a
la diversidad genética de la especie. Al igual que una mutación en los seres vivos, se
realiza un cambio a uno de los genes de un cromosoma elegido aleatoriamente. Cuando
se usa una representación binaria, un bit se sustituye por su complemento (un cero
cambia en uno y viceversa). Este operador permite la introducción de nuevo material
cromosómico en la población tal y como sucede en situaciones biológicas. En un
algoritmo genético, una mutación causa pequeñas alteraciones en puntos concretos del
código de un individuo. El operador mutación se aplica a cada descendiente de manera
individual y consiste en la alteración aleatoria (normalmente con probabilidad pequeña)
de cada gen componente del cromosoma. La mutación es la causante de que los
cromosomas de los hijos puedan ser diferentes a los de los padres.
No conviene abusar de la mutación ya que aunque es un mecanismo generador de
diversidad, y por tanto proporciona una salida cuando un algoritmo genético está
estancado, reduce el algoritmo genético a una búsqueda aleatoria. Siempre es más
conveniente usar otros mecanismos de generación de diversidad como aumentar el
tamaño de la población o garantizar la aleatoriedad de la población inicial.
fenotipo
genotipo
gen mutado
Descendiente
↓
1 0 1 0 0 1 0 0
164
Descendiente mutado
1 0 1 0 1 1 0 0
172
Como ocurre en el cruce, la mutación se maneja como un porcentaje que indica con qué
frecuencia se producirá, aunque a diferencia de la primera sucede de forma más
X.-19
esporádica (el porcentaje de cruce es normalmente de más del 60 % mientras que el de
mutación nunca suele superar el 5 %).
Se puede considerar diferentes técnicas de mutación dependiendo de si la mutación
afecta a un bit, un grupo de bits, a un gen o a un grupo de genes:
¾ Mutación de bit: existe una única probabilidad de que se produzca una mutación
de algún bit. De producirse, el algoritmo toma aleatoriamente un bit y lo
invierte.
¾ Mutación multibit: cada bit tiene una probabilidad de mutarse que es calculada
por el operador de mutación multibit.
¾ Mutación de gen: igual que la mutación de bit, solo que en vez de cambiar un
bit, cambia un gen completo. Puede sumar un valor aleatorio, un valor constante
o introducir un gen aleatorio nuevo.
¾ Mutación multigen: igual que la mutación de multibit, solo que en vez de
cambiar un conjunto de bits, cambia un conjunto de genes. Puede sumar un valor
aleatorio, un valor constante, o introducir un gen aleatorio nuevo.
¾ Mutación de intercambio: existe una probabilidad de que se produzca una
mutación. De producirse, toma dos bits/genes aleatoriamente y los intercambia.
¾ Mutación de barajado: existe una probabilidad de que se produzca una mutación.
De producirse, toma dos bits o dos genes aleatoriamente y baraja de forma
aleatoria los bits o genes.
X.-20
7. Cruce
El segundo método de alteración aleatoria se llama cruce e implica elegir a dos
individuos para que intercambien segmentos de su código, produciendo una
descendencia cuyos individuos son combinación de sus padres. Este proceso simula el
proceso de recombinación que se da en los cromosomas durante la reproducción sexual.
Las formas comunes de cruzamiento incluyen el cruzamiento de un punto, en el que se
establece un punto de intercambio en un lugar aleatorio del genoma de los dos
individuos y uno de los individuos contribuye con todo su código anterior a ese punto y
el otro individuo contribuye con todo su código a partir de ese punto para producir una
descendencia; y el cruzamiento uniforme, en el que el valor de una posición dada en el
genoma de descendencia corresponde al valor en esa posición del genoma de uno de los
padres o al valor en esa posición del genoma del otro padre, elegidos todos ellos con
una cierta probabilidad.
Si se emparejan dos descendientes de los mismos padres; ello garantiza la perpetuación
de un individuo con buenas características (es una práctica utilizada en la cría de ganado
y destinada a potenciar ciertas características frente a otras). Sin embargo, si esto sucede
demasiado a menudo puede crear problemas, toda la población puede aparecer
dominada por los descendientes de algún gen que además puede tener caracteres no
deseados. Esto se corresponde con un estancamiento en un mínimo local.
Considerando el operador de cruce basado en un punto, se toman dos padres
seleccionados y se cortan sus ristras de cromosomas en una posición escogida al azar
para producir dos subristras iniciales y dos subristras finales. Después se intercambian
las subristras finales produciendo dos nuevos cromosomas completos. Ambos
descendientes heredan genes de cada uno de los padres.
fenotipo
genotipo
punto de cruce↓
Progenitores
fenotipo
genotipo
punto de cruce↓
1 1 1 1 0 0 0 1
241
0 0 1 0 1 1 1 1
47
Descendientes 1 1 1 1 1 1 1 1
255
0 0 1 0 0 0 0 1
33
X.-21
Considerando el ejemplo anterior visto desde el punto de vista del genotipo, se tiene un
descendiente dados dos progenitores:
255 = Rnd1 ⋅ 241 + Rnd 2 ⋅ 47
siendo Rnd1 y Rnd2 números generados aleatoriamente comprendidos entre 0 y 1. Es
evidente que es posible encontrar dos valores Rnd1 y Rnd2 que cumplan la relación
anterior. Mas restrictivo sería
255 = Rnd ⋅ 241 + (1 − Rnd ) ⋅ 47
Se han investigado otros operadores de cruce, habitualmente teniendo en cuenta más de
un punto de cruce. De Jong investigó el comportamiento del operador de cruce basado
en múltiples puntos concluyendo que el cruce basado en dos puntos representaba una
mejora, mientras que añadir más puntos de cruce no beneficiaba el comportamiento del
algoritmo. La ventaja de tener más de un punto de cruce radica en que el espacio de
búsqueda puede ser explorado de manera más fácil siendo la principal desventaja el
hecho de aumentar la probabilidad de romper buenas estructuras.
fenotipo
punto de cruce↓
gen.
↓
fenotipo
punto de cruce↓
gen.
↓
Progenit. 1 0 1 0 0 0 1 1 1 0 654
0 0 1 1 0 1 0 0 1 0 210
Descend. 1 0 1 0 0 1 0 1 1 0 662
0 0 1 1 0 0 1 0 1 0 202
Tomando el punto de vista del genotipo; se tiene un descendiente dados dos
progenitores:
662 = Rnd1 ⋅ 654 + Rnd 2 ⋅ 210
En el operador de cruce uniforme de Syswerda, cada gen, en la descendencia se crea
copiando el correspondiente gen de uno de los dos padres, escogido de acuerdo a una
máscara de cruce generada aleatoriamente. Cuando existe un 1 en la máscara de cruce,
X.-22
el gen es copiado del primer padre, mientras que cuando exista un 0, el gen se copia del
segundo padre.
Máscara de cruce
1 0 0 1 0 0 1
Progenitor 1
1 1 0
↓
1 0 0
↑ ↑
0 0 0
Descendiente
Progenitor 2
1 1 0
↓
1 1 1
↑ ↑
1 1 1
1
↓
1
0
Existen diversas variantes a la idea de máscara de cruce al introducir el concepto de
probabilidad de herencia. Si esta probabilidad es alta se heredan mayores características
de los padres. Esta probabilidad puede depender de una gran variedad de parámetros.
Aunque podría pensarse que el operador cruce es más importante que el operador
mutación ya que proporciona una exploración rápida del espacio de búsqueda, éste
último se considera un operador básico que proporciona un pequeño elemento de
aleatoriedad en la vecindad de los individuos de la población. Si bien se admite que el
operador de cruce es el responsable de efectuar la búsqueda a lo largo del espacio de
posibles soluciones, varios investigadores piensan que el operador mutación va ganando
en importancia a medida que la población va convergiendo. Utilizando la denominada
evolución primitiva, en la cual el proceso evolutivo consta tan sólo de selección y
mutación, Schaffer encontró que dicha evolución primitiva supera con creces a una
evolución basada exclusivamente en selección y cruce.
Es importante introducir la definición de convergencia introducida por De Jong. Si el
algoritmo genético ha sido correctamente implementado, la población evolucionará a lo
largo de generaciones sucesivas de tal manera que la adaptación media de todos los
individuos de la población, así como la adaptación del mejor individuo se irán
incrementando hacia el óptimo global. El concepto de convergencia está relacionado
con la progresión hacia la uniformidad, un gen ha convergido cuando un elevado
porcentaje de los individuos de la población comparten el mismo valor para dicho gen.
Se dice que la población converge cuando todos los genes han convergido.
X.-23
Normalmente el cruce se emplea dentro de la implementación del algoritmo genético
como un porcentaje que indica con qué frecuencia se efectuará. Esto significa que no
todas las parejas de cromosomas se cruzarán sino que habrá algunas que pasen intactas a
la siguiente generación. De hecho existe una técnica, denominada elitismo, en la que el
individuo más apto a lo largo de las distintas generaciones no se cruza con nadie y se
mantiene intacto hasta que surge otro individuo mejor que él, que lo desplazará.
X.-24
8. Reducción
Una vez obtenidos los individuos descendientes de una determinada población, el
proceso de reducción al tamaño original consiste en escoger la nueva generación de
población entre los progenitores y los descendientes de los mismos.
Existen dos planteamientos fundamentales a este respecto, en el primero los individuos
generados sustituyen a sus progenitores con lo que un individuo no convive nunca con
sus antecesores (reducción simple). En el segundo planteamiento se sustituyen los
individuos peor adaptados de toda la población (por eso se dice que este modelo sigue
una política elitista), con lo que existirá convivencia entre un individuo y sus ancestros.
No obstante, se han planteado otras consideraciones sustitutivas a fin de evitar la
aparición de elitismo como sustituir una tasa de la población o incluso otros.
El concepto de reducción está ligado con el de tasa de reemplazamiento generacional; es
decir, el porcentaje de descendientes generados con respecto del tamaño de la
población.
Aunque habitualmente suele considerarse un tamaño fijo de población, puede
establecerse un aumento de población o una reducción como sucede en biología
pudiendo llegar a extinguirse la población en cuestión.
X.-25
9. Población
Una interesante pregunta es cual es el tamaño idóneo de la población. Las poblaciones
pequeñas corren el riesgo de no cubrir adecuadamente el espacio de búsqueda mientras
que el trabajar con poblaciones de gran tamaño puede acarrear problemas relacionados
con excesivo costo computacional.
Goldberg efectuó un estudio teórico obteniendo como conclusión que el tamaño óptimo
de la población para ristras de longitud dada, con codificación binaria, crece
exponencialmente con el tamaño de la ristra. Este resultado traería como consecuencia
un tamaño enorme de la población con lo que la aplicabilidad de los algoritmos
genéticos en problemas reales sería muy limitada, ya que resultarían poco competitivos
con otros métodos de optimización combinatoria. Alander, basándose en evidencias
empíricas sugirió que un tamaño de población no superior a 21 individuos sería
suficiente para atacar con éxito los problemas.
Habitualmente la población inicial se escoge generando datos al azar, pudiendo contener
cada gen uno de los posibles valores del alfabeto, con probabilidad uniforme. En los
pocos análisis acerca de que sucedería si los individuos de la población inicial se
obtuviesen como resultado de alguna técnica heurística o de optimización local, se ha
constatado que esta inicialización no aleatoria de la población inicial puede acelerar la
convergencia del algoritmo genético, aunque en algunos casos la desventaja resulta ser
la prematura convergencia del algoritmo o lo que es lo mismo la convergencia hacia
óptimos locales.
Generalmente, salvo poblaciones iniciales realmente degeneradas en los que el operador
de mutación va a tener mucho trabajo, la convergencia es poco sensible a la población
inicial si esta se escoge de forma aleatoria y es lo suficientemente grande.
X.-26
10. Condición de parada
Básicamente, la condición de terminación debe ser la convergencia del algoritmo
genético hacia una solución estable o alcanzar un número prefijado de generaciones.
Como el algoritmo genético opera con una población en cada iteración, se espera que el
método converja de manera que al final del proceso la población sea muy similar y en el
infinito se reduzca a un sólo individuo.
Para cadenas binarias existe una compleja teoría para demostrar la convergencia de los
algoritmos genéticos. Básicamente, esta teoría se basa en considerar que una cadena es
un representante de una clase de equivalencia o esquema focalizando la búsqueda entre
esquemas en vez de entre cadenas. A partir de este resultado el teorema de esquemas
demuestra que la población converge a unos esquemas que cada vez son más parecidos
y en el límite teórico a una única cadena.
En el caso de cadenas no binarias, el problema está menos estudiado y aparecen los
conceptos de forma y conjunto de similitud que intentan generalizar al de esquema.
Exigiendo que al cruzar dos cadenas de la misma clase se obtenga otra de esta misma
clase, y asumiendo la selección de los progenitores bajo ciertas condiciones, es posible
demostrar la convergencia del algoritmo.
La realidad es que las condiciones impuestas suelen ser muy estrictas y no se suelen
cumplir, por lo que en ocasiones los algoritmos genéticos resuelven satisfactoriamente
un problema y otras se quedan más lejos del óptimo.
La curva de convergencia asociada al algoritmo suele presentar una convergencia rápida
al principio, para casi enseguida bloquearse. Esto se debe a que el algoritmo genético es
excelente descartando subespacios realmente malos. Cada cierto tiempo, la población
vuelve dar el salto evolutivo y se produce un incremento mayor en la velocidad de
convergencia. La razón de esto es que algunas veces aparece una mutación altamente
beneficiosa, o un individuo excepcional, que propaga algún conjunto de cromosomas
excepcional al resto de la población.
X.-27
Se van a establecer tres condiciones de parada que detienen el algoritmo si se cumple
una cualquiera de ellas.
10.1.
Condición 1
Si la solución no ha mejorado, tras K1 series consecutivas de L pasos, una cierta
cantidad definida por ∈1 > 0 .
E (K1 ⋅ L + n ) > E (n ) ⋅ (1+ ∈1 ) ⇒ FIN
10.2.
Condición 2
La convergencia de la población se espera en la medida que al final del proceso la
población sea muy similar, y en el infinito se reduzca a un sólo individuo. Con esta
condición, se comprobará el grado de semejanza de la población para lo cual se va a
emplear un análisis estadístico.
Cada individuo se codifica como un conjunto de cromosomas. El conjunto de
parámetros representando un cromosoma particular se denomina fenotipo y a partir del
fenotipo se obtiene el genotipo. Finalmente, un individuo concreto se representa como
un conjunto de genotipos. El análisis que se va a realizar a continuación se reseña para
un genotipo concreto. La condición de parada deberá cumplirse para cada uno de los
genotipos que representa un individuo.
Considérese el genotipo a analizar de una población concreta compuesta por N
individuos e imagínese que esta población concreta es una muestra extraída
aleatoriamente de una población madre compuesta por una colección de genotipos
mucho mayor. Con esta hipótesis de partida, es posible aplicar la Teoría de la
Estimación. Considerando el estadístico media y el estadístico varianza:
a=
x1 + K + x N
N
X.-28
s
2
2
2
(
x1 − a ) + K + ( x N − a )
=
N
Se considera que se ha alcanzado la condición de parada cuando un alto porcentaje de la
población se encuentra dentro del intervalo de confianza elegido. Se ha tomado un
intervalo de confianza del 90 %, aunque el análisis puede efectuarse para cualquier otro
intervalo de confianza. De este modo, se considera que la población converge cuando el
90 % de los individuos se encuentran dentro del intervalo de confianza de la
distribución estadística. Asumiendo que la población madre presenta una distribución
normal, se puede estimar la media y la desviación típica. Para una gran muestra (N >
30), la media se estima como:
α = a ± w90 [N (0,1)]
s
N
siendo w90 [N (0,1)] el valor que define el intervalo de confianza de la distribución
normal N(0,1), de tal forma que el 90 % de los individuos se encuentran dentro del
intervalo de confianza de la campana de Gauss.
Para una pequeña muestra (N < 30):
α = a ± w90 (t N −1 )
s
N −1
siendo w90(tN-1) el valor que define el intervalo de confianza de la distribución t de
Student con N-1 grados de libertad, de tal forma que el 90 % de los individuos se
encuentran dentro del intervalo de confianza de la distribución.
La desviación típica se estima de la siguiente expresión:
χ N2 −1 =
N ⋅ s2
σ2
X.-29
siendo χ N2 −1 la distribución chi-cuadrado con N-1 grados de libertad.
N ⋅ s2
σ2 =
(
)
(
)
w0.05 χ N2 −1
N ⋅ s2
w0.95 χ N2 −1
Los dos valores de σ 2 definen el intervalo de confianza de la distribución chi-cuadrado
con N-1 grados de libertad, de tal forma que el 90 % de los individuos se encuentran
dentro del intervalo de confianza de la distribución.
Esta condición se comprobará tras K2 series consecutivas de L pasos.
10.3.
Condición 3
Si el número de iteraciones alcanza un valor superior al valor máximo establecido M.
X.-30
11. Implementación del algoritmo
Los algoritmos genéticos son métodos de optimización que tratan de hallar (xi,...,xn)
tales que E(xi,...,xn) sea máximo. En un algoritmo genético, tras parametrizar el
problema en una serie de variables, (xi,...,xn), se codifican en forma de cromosomas.
Todos los operadores utilizados por un algoritmo genético se aplicarán sobre estos
cromosomas o sobre poblaciones de ellos. Un algoritmo genético es independiente del
problema a resolver lo cual lo hace un algoritmo robusto, por ser útil para cualquier
problema, pero a la vez débil pues no está especializado en ninguno.
Se elige un punto inicial del espacio de soluciones que cumpla las condiciones del
problema. En el sistema se debe definir el tamaño de paso que permite definir el resto
de individuos de la población inicial. Este tamaño debe ser un orden de magnitud menor
que el tamaño característico de óptimo local y está íntimamente ligado a la suavidad de
la función objetivo. Un grado de discretización excesivamente fino penaliza el
rendimiento mientras que un grado de discretización muy grande va ha hacer que los
pasos sean inútiles, ya que no se consideran soluciones, limitándose el algoritmo a
funcionar como un mero explorador de soluciones. Este hecho condiciona el espacio de
soluciones que será capaz de alcanzar el método.
En todo problema existe una relación entre el espacio de soluciones, el tamaño de paso,
el número de iteraciones a realizar y la velocidad de cálculo del computador. Para un
problema concreto, la velocidad de cálculo del computador condiciona el número de
iteraciones a realizar, por lo que definido el tamaño del paso se tiene el espacio de
soluciones. Evidentemente, para explorar un determinado espacio de soluciones se debe
tomar la solución inicial en ese espacio. Todo esto si el espacio de soluciones es lo
suficientemente extenso, pero puede ocurrir que el espacio de soluciones se encuentre
limitado lo que condiciona los individuos de la población.
En el problema que se está analizando, la obtención de la función objetivo requiere un
elevado tiempo de cálculo de ordenador ya que implica el cálculo de una trayectoria
balística completa. Este inconveniente condiciona el concepto de tasa de
reemplazamiento generacional; es decir, la reducción de la población. De este modo, al
X.-31
efecto de reducir el tiempo de ordenador sustancialmente, solo se va a considerar un
único descendiente de dos progenitores. En cada generación, se localiza el individuo
menos apto que desaparecerá siendo sustituido por un descendiente de dos padres. Así,
la población estará formada por todos los ancestros y el único descendiente que se ha
generado.
La gran cantidad de opciones que se pueden elegir al utilizar un algoritmo genético hace
necesario establecer algún criterio que permita identificar que características son más
apropiadas para el problema concreto a resolver. La forma de elegir la población inicial,
el número de individuos de los que consta la población, el tipo de selección, etc. son
cuestiones difusas a priori. Para estudiar este fenómeno se va a calcular un problema
tipo con diferentes configuraciones y se van a comparar las soluciones obtenidas de
forman análoga a como ya se realizó al aplicar el método de recocido simulado
Así, se van a localizar los factores de ajuste de un problema balístico para un proyectil
base burn, empleando el método 1 del Modelo Modificado de Masa Puntual. Utilizando
el algoritmo de recocido simulado se van a determinar los cuatro factores de ajuste tDI,
K(p) (función lineal) y f(iBB,MT) para un ángulo de tiro concreto. Se ha escogido para
ello el proyectil OE155F2RTC FR HEA BB1, disparado desde un tubo 155AUF1 con
una carga C7, por ser un proyectil muy estudiado del que se dispone abundante
información calculada mediante el método 1. Dado que en este algoritmo la velocidad
de cálculo es muy importante para obtener resultados de forma rápida, se ha recurrido al
método 1 por permitir una mayor velocidad en la computación. Inicialmente, se
realizaron una serie de cálculos empleando un ángulo de tiro de 300 milésimas pero se
ha podido comprobar que la dispersión de resultados aumenta en la medida que se
emplean ángulos de tiro superiores. Posteriormente, se podrá ver que para mejorar el
proceso de optimización del algoritmo, interesa tener una mayor dispersión en los
resultados que permitan ver claramente las diferencias de una configuración a otra. De
igual forma, se ha escogido la carga más elevada por presentar una mayor dispersión en
los datos obtenidos. Aumentando el ángulo de tiro, se han encontrando muy pocas
diferencias entre 700 y 900 milésimas por lo que finalmente los cálculos se han
efectuado con un ángulo de tiro de 700 milésimas, al objeto de evitar efectos asociados
al segundo sector que podrían enmascarar y confundir los resultados obtenidos, y
también para reducir el tiempo de cálculo.
X.-32
Para cada carga, de los cuatro factores de ajuste, únicamente el factor base burn
f(iBB,MT) es función del ángulo de tiro siendo el tiempo de retraso a la ignición del
motor base burn tDI función de la temperatura de propulsante del motor MT, y el factor
de quemado con la velocidad de rotación axial del proyectil K(p) una función lineal de
la velocidad de rotación axial del proyectil p. En este momento se va a trabajar con un
único ángulo de tiro y no es de aplicación pero se debe tener en cuenta que mientras que
f(iBB,MT) es función del ángulo de tiro, tDI y K(p) no lo son.
Obtenido el alcance y la deriva de experiencias realizadas, se van a calcular los factores
de ajuste tDI, K(p) y f(iBB,MT) que mejor aproximen el alcance y la deriva. Se han
escogido estos parámetros por ser los más representativos del tiro de artillería. La
adición a los anteriores de la ordenada máxima ha permitido constatar un
empeoramiento en el cálculo de los factores de ajuste. Si se obtienen unos factores de
ajuste que mejor ajusten alcance y deriva y unos segundos factores de ajuste que mejor
ajusten alcance, deriva y ordenada máxima; se ha observado que si se calcula alcance y
deriva con los segundos factores de ajuste, se obtienen peores valores que usando los
primeros factores de ajuste. Esto es debido a que la ordenada máxima es un parámetro
que ante variaciones en los factores de ajuste, experimenta variaciones mucho mayores
que las apreciadas en alcance y deriva. En concreto, las variaciones en la ordenada
máxima pueden llegar a ser del orden de diez veces superiores a las encontradas para
alcance y deriva. También se ha constatado la dificultad por parte del Modelo
Modificado de Masa Puntual de proporcionar valores acertados de la ordenada máxima,
una vez ajustada la deriva y el alcance, con datos extraídos de experiencias reales.
Finalmente, se ha optado por ajustar únicamente alcance y deriva.
Si a través de experiencias realizadas se obtiene el alcance y la deriva, que se designaran
como alcanceexp y derivaexp, se define la función objetivo como:
E=
(alcance − alcance ) + (deriva − deriva )
2
exp
2
exp
siendo los términos alcance y deriva los obtenidos como resultado de haber realizado
todo el proceso de cálculo en función de los factores de ajuste tDI, K(p) y f(iBB,MT). Una
X.-33
característica muy importante de este problema es que se conoce, a priori, el valor
óptimo buscado de la función objetivo. Como condiciones iniciales, se considera que
para el tiempo de retraso a la ignición del motor base burn tDI se introducirá el valor
correspondiente, en el supuesto de que se conozca. Si no se dispone de información
adicional, se considerará tDI = 0 siendo el resto de valores K(p) = 1 y f(iBB,MT) = 1 .
Como ya se comentó anteriormente, el algoritmo de integración utilizado ha sido el
Runge Kutta 45. Los parámetros eRK, hmin y hmax se han elegido para obtener una
precisión inferior a un metro en el cálculo de la deriva y el alcance: hmin = 0.04 s, hmax =
6.0 s y eRK = 0.1 .
Inicialmente, se va a efectuar una selección de padres al azar favoreciendo a los
individuos mejor adaptados, asignando a cada individuo una probabilidad de ser
seleccionado proporcional a la función objetivo. Este procedimiento está basado en la
ruleta sesgada. Según dicho esquema, los individuos bien adaptados se escogerán
probablemente varias veces por generación mientras que los pobremente adaptados al
problema no se escogerán más que de vez en cuando.
Esta función de selección de padres es más utilizada y se denomina función de selección
proporcional a la función objetivo. Siendo E la función objetivo y λ el número de
individuos que constituyen la población, la probabilidad de que el individuo j sea
seleccionado como padre es:
pj =
Ej
; 0 ≤ pj <1
λ
∑E
j =1
j
Definiendo para cada individuo el parámetro qj como
i
qi = ∑ p j
j =1
Generando un número aleatorio Rnd, comprendido entre 0 y 1; si qk −1 < Rnd ≤ qk el
X.-34
individuo seleccionado es el k siendo q0 = 0 .
El segundo progenitor se elige de igual modo aunque se debe tener en cuenta que si un
Ej fuese muy grande comparado con el resto de individuos, este individuo sería
seleccionado siempre y sería imposible elegir un segundo progenitor, por lo que en este
caso el segundo progenitor se elige de forma aleatoria pura.
Una vez elegidos los progenitores se va a proceder a combinar el material genético para
obtener un descendiente. Considerando la dificultad del problema balístico elegido para
aplicar el algoritmo genético, se va a emplear una codificación mediante números
decimales. Este enfoque permite una mayor precisión y complejidad que el método de
utilizar sólo números binarios, y está intuitivamente más cerca del espacio de
problemas. Recordando la expresión de cruce analizada anteriormente
descendiente = Rnd1 ⋅ progenitor1 + Rnd 2 ⋅ progenitor 2
siendo Rnd1 y Rnd2 números generados aleatoriamente comprendidos entre 0 y 1.
Una vez seleccionada la población inicial, el operador de cruce es el encargado de
efectuar la búsqueda a lo largo del espacio de posibles soluciones, pero el operador
mutación es el responsable de introducir nuevo material genético en la población tal y
como sucede en biología. De ahí, la gran importancia del operador mutación. En los
algoritmos genéticos, una mutación es un suceso muy poco habitual aunque su
frecuencia es mayor que en la naturaleza. Se recomienda que dicho porcentaje no sea
superior al 5 %. En biología, la mayoría de las mutaciones no sobreviven aunque el
pequeño porcentaje de las que si lo hacen introducen información genética adicional que
permite mejorar la especie. En los algoritmos genéticos, la situación es análoga ya que
si la mutación representa una mejora para alcanzar el óptimo, el individuo pasa a formar
parte de la población pero si no lo hace, el individuo termina por desaparecer. Este
razonamiento permite justificar la utilización del operador mutación en un porcentaje no
superior al máximo definido, que es el que se ha empleado finalmente.
Se ha considerado apropiada para este problema la siguiente condición de parada; L =
X.-35
100, K1 = 4, ∈1 = 0.5 , K2 = 4, ∈2 = 0.5 y M = 1000. En el peor de los casos, cada proceso
de cálculo independiente finaliza cuando se alcanza el número máximo de iteraciones
M, que teniendo en cuenta el tiempo de ejecución de ordenador, se ha considerado
suficiente fijarlo en 1000. A fin de comprobar la calidad de los resultados obtenidos se
va a establecer un sistema en el cual, tras alcanzar la condición de parada y extraer el
óptimo correspondiente, se va a continuar calculando hasta volver a alcanzar una nueva
condición de parada con su correspondiente nuevo óptimo, y así sucesivamente. Así, se
han ejecutado veinte de estos procesos de cálculo diferentes, comprobando como
cuando el algoritmo alcanza el óptimo puede hacerlo con diferentes valores de factores
de ajuste; es decir, aunque el valor del óptimo sea muy similar, existen diferentes
combinaciones de los factores de ajuste que alcanzan ese valor del óptimo. A fin de
investigar este fenómeno, se ha considerado realizar otros diez procesos de cálculo
fijando tDI = 0 , no obteniendo grandes diferencias con respecto al caso anterior.
Finalmente, se han calculado otros diez procesos de cálculo fijando tDI = 0 y K(p) una
función constante, sin considerar la dependencia con la velocidad de rotación axial del
proyectil p, mostrando estos últimos resultados, como en los diez procesos de cálculo se
ha alcanzado aproximadamente el mismo óptimo con similares factores de ajuste.
Resumiendo, se ha establecido un número de procesos cálculo de cuarenta, los cuales se
utilizaran posteriormente a efectos de valorar los resultados proporcionados por el
algoritmo.
A partir del valor inicial es necesario definir el conjunto de individuos que componen la
población inicial. Como cada individuo se encuentra representado por un conjunto de
genotipos, es necesario producir variaciones en estos genotipos que permitan obtener la
población. A tenor de esta idea, se va a definir un tamaño de paso que con carácter
general permitirá extender la población:
Δ = f esc ⋅ Pre ⋅ Rnd ⋅10
siendo fesc el factor de escala, Pre la precisión y Rnd un número aleatorio.
Este tamaño de paso debe ser un orden de magnitud menor que el tamaño característico
de óptimo local. Un tamaño mayor no permitirá al algoritmo funcionar como algoritmo
X.-36
de optimización convirtiéndose, en un mero explorador de soluciones. Esta es la idea
inherente al introducir el parámetro precisión. En este problema se ha encontrado una
buena aproximación para Pre = 10e-4 .
Este tamaño puede ser diferente dependiendo de la variable a la que vaya a afectar ya
que la escala de cada una de las dimensiones no tiene porque ser la misma. Esto
conlleva a que es necesario definir el factor de escala que afecta a cada una de las
variables.
A partir del valor inicial es necesario especificar el conjunto de individuos que
componen la población inicial. Precisado el tamaño de paso, se va a proceder a definir
cada uno de los individuos que componen la población inicial para lo cual se va a
emplear un método puramente aleatorio consistente en tomar el vector de estado o lo
que es lo mismo, el conjunto de genotipos que en este caso son cuatro genotipos; tDI,
K(p) y f(iBB,MT), e introducir una pequeña perturbación a partir de las condiciones
iniciales sumando una cantidad dada Δ a cada genotipo, con Rnd comprendido entre -1
y 1 . Esto se efectuara para cada uno de los individuos que componen la población
inicial.
En cuanto al número de individuos que componen la población, haciendo referencia a
consideraciones estadísticas que establecen como infinito estadístico el valor de treinta,
se ha considerado inicialmente una población constituida por treinta individuos.
Una vez definido el tamaño de paso, es posible definir el concepto de mutación de
acuerdo a la forma de codificación elegida mediante números decimales.
Δ m = f esc ⋅ Pre ⋅ Rnd ⋅10 n
siendo fesc el factor de escala, Pre la precisión, Rnd un número aleatorio comprendido
entre -1 y 1, y n un número aleatorio comprendido entre 1 y 3. Los elementos fesc y Pre
toman los mismos valores que los introducidos en Δ .Como ya se indico anteriormente
la frecuencia con la que aparece la mutación no debe superar el valor reseñado. De este
modo, cuando surge el individuo candidato a sufrir una mutación, se elige al azar uno de
X.-37
los genotipos que compone dicho individuo y se le adiciona una cantidad dada Δ m .
La gran cantidad de condicionantes que tiene este algoritmo permite imaginar tantas
posibilidades que resulta materialmente impensable mostrarlas todas. No obstante, una
primera pregunta que surge y que ya se comentó con anterioridad es que incidencia
puede tener la utilización del método de cruce. Si se comparan las expresiones escritas a
continuación, se puede observar a priori que la segunda es más restrictiva que la
primera; no obstante, para el problema a resolver cabe preguntarse cual proporcionará
mejores resultados.
descendiente = Rnd1 ⋅ progenitor1 + Rnd 2 ⋅ progenitor 2
descendiente = Rnd ⋅ progenitor1 + (1 − Rnd ) ⋅ progenitor 2
En las siguientes gráficas se van a comparar las dos configuraciones descritas
anteriormente mostrando alcance y deriva. Se ha designado como GA2 aquella que
introduce dos valores Rnd y GA1 aquella que introduce un único valor Rnd. Definiendo
el área existente entre el valor calculado y el valor exacto para GA2 y GA1, y
calculando la diferencia entre las dos áreas, puede estimarse que valor calculado se
acerca más al valor exacto. Así, se ha obtenido que en alcance GA2 resulta mucho
mejor que GA1 ya que un 50 % de los puntos que se obtienen empleando GA1
presentan un error bastante elevado. En cuanto a la deriva se tiene que GA1 presenta
una ligera mejoría frente a GA2; sin embargo, porcentualmente hablando, esta mejoría
es muy pequeña y no compensa el empeoramiento que se obtiene en alcance. Esto
condiciona la elección de GA2, empleando dos valores de Rnd diferentes, como método
más eficaz de cálculo debido a que aunque en deriva GA1 presenta ligeras mejoras, al
comparar el alcance se puede observar que GA1 muestra errores muy elevados.
X.-38
Otra opción sería variar el número de individuos que componen la población inicial para
X.-39
conocer si existe alguna mejora por el hecho de emplear una población de un número de
individuos determinado. Anteriormente, se estableció una población constituida por
treinta individuos. Una población inicial mayor introducirá un mayor contenido
genético lo cual constituye una ventaja a la hora de intentar salir de mínimos locales,
por lo que se va a comparar el tamaño de población original de treinta individuos con
una población formada por cien individuos. Este valor viene condicionado por el
número máximo de iteraciones a realizar establecido en las condiciones de parada ya
que en este método la población debe evolucionar hacia la convergencia y se debe
permitir que las generaciones se crucen y tengan descendencia. De este modo y teniendo
en cuenta el número máximo de iteraciones establecido anteriormente, se ha
considerado como apropiado poder llegar a tener una población del orden del 10 % el
número máximo de iteraciones.
Analizando los resultados obtenidos, puede observarse como en general se obtiene una
ligera mejoría al utilizar una población mayor.
X.-40
Anteriormente se definió la población inicial tomando el vector de estado o lo que es lo
mismo, el conjunto de genotipos; tDI, K(p) y f(iBB,MT), e introduciendo una pequeña
perturbación a partir de las condiciones iniciales sumando una cantidad dada Δ a cada
genotipo, con Rnd comprendido entre -1 y 1 , para cada uno de los individuos que
componen la población inicial.
No obstante, se plantea definir la población inicial empleando otro método de claras
influencias en las técnicas de recocido simulado, consistente en tomar el vector de
estado para cada individuo y realizar un sorteo entre todas las componentes para
decrementar la elegida una cantidad dada Δ , con Rnd comprendido entre 0 y 1 .A
continuación se realizará un nuevo sorteo entre las componentes restantes, que no han
variado, y se incrementa la elegida un nuevo valor Δ , con Rnd comprendido entre 0 y 1
. Esto se hará para cada uno de los individuos que componen la población inicial. Esta
última forma de definir la población se ha designado como GA pob2 mientras que la
primera se ha designado como GA pob1.
Analizando los resultados obtenidos, puede observarse como en general se obtiene una
X.-41
ligera mejoría con GA pob1.
X.-42
Un problema usual que puede surgir es la velocidad con que el algoritmo converge
pudiendo aparecer la convergencia prematura, en la cual el algoritmo converge hacia
óptimos locales. El problema de la convergencia prematura, nace a menudo cuando la
selección de individuos se realiza de manera proporcional a su función objetivo. En tal
caso, pueden existir individuos con una adaptación al problema muy superior al resto,
que a medida que avanza el algoritmo dominan a la población y acaban con la
diversidad genética del problema. Se debe efectuar algún tipo de ardid para que dichos
superindividuos no lleguen a dominar a la población; es decir, salir del óptimo local
para encontrar otros óptimos que faciliten la localización del óptimo global.
Una de las maneras de soslayar el problema relacionado con la rápida convergencia
proveniente de los superindividuos, que surge al aplicar la función de selección
proporcional a la función objetivo, es efectuar la selección mediante torneo. Se eligen
dos subgrupos de individuos de la población al azar, y los miembros de cada subgrupo
rivalizan entre ellos en un torneo del que resultará ganador el que tenga mejor aptitud.
Sólo se elige un individuo de cada subgrupo para la reproducción.
En las siguientes gráficas se va a comparar las dos configuraciones relatadas
anteriormente. Se ha designado como GA PFO aquella que incorpora la selección
proporcional a la función objetivo y GA torneo aquella que utiliza la selección como su
propio nombre indica. Analizando los resultados, puede observarse como GA torneo
presenta mejorías respecto a GA PFO en cuanto a un mayor agrupamiento de resultados
en torno al valor exacto.
X.-43
X.-44
Otra forma de superar el problema relacionado con la rápida convergencia proveniente
de los superindividuos, que surge al aplicar la función de selección proporcional a la
función objetivo, es efectuar la selección proporcional al rango del individuo con lo que
se produce una repartición más uniforme de la probabilidad de selección. Los
individuos de la población han sido ordenados de menor a mayor; es decir, al peor
individuo se le asigna el rango uno, mientras que el individuo con mejor función
objetivo tiene rango el número de individuos de la población, y la probabilidad de que
un individuo sea seleccionado como padre cuando la selección se efectúa
proporcionalmente al rango del individuo, se tiene como
pj =
rango(E j )
λ (λ + 1) 2
La suma de los rangos, λ (λ + 1) 2 , constituye la constante de normalización. La función
de selección basada en el rango es invariante frente a translaciones y a cambios de
escala.
En las siguientes gráficas se va a comparar las dos configuraciones descritas
anteriormente. Se ha designado como GA rango y GA torneo los que utilizan la
selección como su propio nombre indica. Analizando los resultados, puede observarse
como la diferencia entre ambos es muy pequeña aunque puede asegurarse sin ningún
género de dudas que son superiores a la selección proporcional a la función objetivo.
X.-45
X.-46
X.-47
X.-48
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO XI
RECOCIDO SIMULADO FRENTE A
ALGORITMO GENÉTICO
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
XI.-1
XI.-2
XI.-RECOCIDO
SIMULADO
FRENTE
A
ALGORITMO
GENÉTICO
Se van a comparar los resultados obtenidos anteriormente empleando el algoritmo de
recocido simulado frente al algoritmo genético. Para ello se va a continuar el estudio
iniciado en los capítulos anteriores, analizando el problema balístico para un proyectil
base burn empleando el método 1, en el cual se van a determinar los factores de ajuste
tDI, K(p) (función lineal) y f(iBB,MT). Se ha utilizado el proyectil OE155F2RTC FR
HEA BB1, disparado desde un tubo 155AUF1, con una carga C7 y un ángulo de tiro de
700 milésimas. Obtenido el alcance y la deriva de experiencias realizadas, se han
calculado los factores de ajuste tDI, K(p) y f(iBB,MT) que mejor aproximen alcance y
deriva. Supóngase que a través de experiencias realizadas se obtiene el alcance y la
deriva, que se designaran como alcanceexp y derivaexp, con lo que la función objetivo se
define como
E=
(alcance − alcance ) + (deriva − deriva )
2
exp
2
exp
siendo los términos alcance y deriva los obtenidos como resultado de haber realizado
todo el proceso de cálculo en función de los factores de ajuste tDI, K(p) y f(iBB,MT).
Se ha considerado apropiada para este problema la siguiente condición de parada; L =
100, K1 = 4, ∈1 = 0.5 , K2 = 4, ∈2 = 0.5 y M = 1000. En el peor de los casos, cada proceso
de cálculo independiente finaliza cuando se alcanza el número máximo de iteraciones
M, que teniendo en cuenta el tiempo de ejecución de ordenador, se ha considerado
suficiente fijarlo en 1000. A fin de comprobar la calidad de los resultados obtenidos se
va a establecer un sistema en el cual, tras alcanzar la condición de parada y extraer el
óptimo correspondiente, se va a continuar calculando hasta volver a alcanzar una nueva
condición de parada con su correspondiente nuevo óptimo, y así sucesivamente. Así, se
han ejecutado veinte de estos procesos de cálculo diferentes, comprobando como
cuando el algoritmo alcanza el óptimo puede hacerlo con diferentes valores de factores
de ajuste; es decir, aunque el valor del óptimo sea muy similar, existen diferentes
combinaciones de los factores de ajuste que alcanzan ese valor del óptimo. A fin de
investigar este fenómeno, se ha considerado realizar otros diez procesos de cálculo
XI.-3
fijando tDI = 0 , no obteniendo grandes diferencias con respecto al caso anterior.
Finalmente, se han calculado otros diez procesos de cálculo fijando tDI = 0 y K(p) una
función constante, sin considerar la dependencia con la velocidad de rotación axial del
proyectil p, mostrando estos últimos resultados, como en los diez procesos de cálculo se
ha alcanzado aproximadamente el mismo óptimo con similares factores de ajuste.
Resumiendo, se ha establecido un número de procesos cálculo de cuarenta, los cuales se
utilizaran posteriormente a efectos de valorar los resultados proporcionados por el
algoritmo.
En las siguientes gráficas se van a comparar los resultados obtenidos en los capítulos
anteriores utilizando el algoritmo de recocido simulado frente al algoritmo genético. En
cada uno de ellos, ya se efectuó un extenso proceso de investigación y mejora de
manera independiente, para ser capaz de obtener los mejores resultados aprovechando la
infraestructura de cálculo disponible. En este punto, ha llegado el momento de comparar
uno contra el otro mostrando el alcance y la deriva. En el caso del algoritmo genético, se
ha utilizado la configuración de torneo. Analizando los resultados obtenidos, puede
observarse como el algoritmo de recocido simulado presenta una mejoría enorme frente
al algoritmo genético.
XI.-4
Si bien el algoritmo de recocido simulado resulta mejor que el algoritmo genético, el
primero presenta el inconveniente de que requiere una labor de determinación (y por
tanto de prueba y error) muy exhaustiva de ciertos parámetros, en concreto la constante
de Boltzmann debe reajustarse en cuanto se cambia cualquier otro parámetro que afecte
al problema. Esto implica un mayor tiempo de cálculo al tener que realizar ajustes
constantes para obtener buenos resultados. Este inconveniente no lo presenta el
algoritmo genético que es más robusto en ese aspecto, si bien menos preciso.
XI.-5
XI.-6
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO XII
MODELIZACIÓN DE PROYECTILES BASE
BURN MÉTODO 1
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
XII.-1
XII.-2
XII.-MODELIZACIÓN DE PROYECTILES BASE BURN MÉTODO
1
1. Índice
1. Índice
2. Introducción
3. Proyectiles base burn método 1
3.1.
Área de combustión del propulsante base burn SC
3.2.
Coeficiente de reducción de resistencia base burn CxBB
3.3.
Parámetro de inyección de eficiencia óptima I0
3.4.
Implementación del método de cálculo
XII.-3
XII.-4
2. Introducción
El cálculo de trayectorias balísticas efectuado numéricamente de un proyectil base burn
necesita del conocimiento de los coeficientes aerodinámicos, los coeficientes base burn
y los factores de ajuste.
Los coeficientes aerodinámicos pueden obtenerse a través de programas informáticos
existentes, de ensayos en túneles de viento o bien de bases de datos suministradas por el
fabricante del proyectil. Existen aplicaciones informáticas como PRODAS o McDrag
que proporcionan los coeficientes aerodinámicos a partir de la geometría del proyectil
en base a ciertos ajustes fenomenológicos obtenidos a partir de ensayos; o bien, a partir
de la integración numérica de las ecuaciones de Navier Stokes, proceso conocido
abreviadamente como CFD (Computational Fluid Dynamics).
La modelización de una forma detallada del proceso de quemado del propulsante así
como de la reducción de la resistencia al aumentar la presión en la base, se materializa
en el STANAG 4355 a través de una serie de funciones que caracterizan el
comportamiento del proyectil. Esto implica un conocimiento muy detallado de la
reacción química que ocurre al quemarse el propulsante en la cámara de combustión, y
que ocasiona una disminución de la resistencia al incrementarse la presión en la base
por la inyección de los gases procedentes de la combustión del propulsante.
De este forma, al aplicar el Modelo Modificado de Masa Puntual para proyectiles base
burn existe un conjunto de coeficientes adicionales relativos al proceso de quemado del
propulsante, así como a la disminución de la resistencia producida por el aumento de la
presión en la base. Estos coeficientes base burn pueden obtenerse de ensayos en
laboratorio o bien de bases de datos suministradas por el fabricante del proyectil. No es
objeto de este trabajo la determinación de los coeficientes aerodinámicos, dado que este
problema se encuentra resuelto en la actualidad de una forma u otra, como se ha descrito
antes. No obstante, la obtención de los coeficientes base burn representa un problema
importante y, constituye el objeto y las aportaciones de esta tesis.
No obstante, en pocas ocasiones se tiene conocimiento de esta información que el
XII.-5
fabricante se reserva como oro en paño siendo la única alternativa posible el obtener
tales funciones de ensayos en laboratorios especializados. Estos ensayos son muy
costosos y únicamente se lo pueden permitir países con elevados presupuestos. Una
alternativa a esto, mucho más barata y que puede resultar adecuada para Unidades
Militares con bajos presupuestos, es la determinación de un método que permita el
cálculo de estos factores de ajuste a través de los resultados obtenidos de experiencias.
Con los datos obtenidos de experiencias realizadas, se van a calcular unas funciones que
mejor aproximen estos mismos datos de experiencias. El alcance y la deriva constituyen
los parámetros prioritarios a ajustar en el proceso de optimización, los cuales han sido
escogidos por ser los más representativos del tiro de artillería. Como ya se comentó con
anterioridad, la adición a los anteriores de la ordenada máxima ha permitido constatar
un empeoramiento en el cálculo de los coeficientes. Si se obtienen unos coeficientes que
mejor ajusten alcance y deriva, y unos segundos coeficientes que mejor ajusten alcance,
deriva y ordenada máxima; se ha observado; que si se calcula alcance y deriva con los
segundos coeficientes, se obtienen peores valores que usando los primeros coeficientes.
Esto es debido a que la ordenada máxima es un parámetro que ante variaciones en los
coeficientes, experimenta variaciones mucho mayores que las apreciadas para alcance y
deriva. También se ha constatado la dificultad por parte del Modelo Modificado de
Masa Puntual de proporcionar valores acertados de la ordenada máxima, una vez
ajustada la deriva y el alcance, con datos extraídos de experiencias reales.
El alcance y la deriva son los parámetros más representativos del tiro de artillería y por
tanto el principal objetivo en este trabajo es su ajuste; no obstante, con posterioridad se
podrá comprobar como va a ser necesario otro parámetro obtenido de experiencias, el
tiempo de extinción del motor base burn. Sin este dato no se podrá determinar
apropiadamente la velocidad de combustión del propulsante base burn y habría que
recurrir a algún otro tipo de artificio.
Así, el Modelo Modificado de Masa Puntual para proyectiles base burn involucra el
conocimiento de una serie de funciones que modelizan el comportamiento del proyectil,
y que implican un conocimiento preciso del proceso de quemado del propulsante así
como de la reducción de la resistencia al incrementar la presión en la base. La
determinación de un método que permita el cálculo de estas funciones a través de los
resultados obtenidos de experiencias realizadas constituye un problema de optimación
XII.-6
complejo para lo cual se han desarrollado una serie de herramientas numéricas. El
incremento del número de parámetros de los que dependen las funciones a optimizar
hace de ardua aplicación los algoritmos clásicos, lo que ha dado lugar a la utilización de
algoritmos heurísticos. De este modo, se han implementado diversos procedimientos de
búsqueda de soluciones que tenían un objetivo común; resolver un determinado
problema para el que era muy costoso obtener su solución exacta mediante los métodos
de optimización puramente analíticos.
La dificultad de encontrar el mejor óptimo mediante métodos clásicos en situaciones
donde se tienen múltiples óptimos resulta evidente. Si a esto se le añade el hecho de que
la función a optimizar tiene un número elevado de variables de las que depende, la
complicación del problema crece substancialmente.
Existen muchos problemas de optimización que son muy difíciles de resolver de manera
exacta. En estos casos, se plantean algoritmos que permitan obtener soluciones cercanas
al valor óptimo de la función objetivo, invirtiendo un tiempo razonable. Este tipo de
algoritmos se denominan heurísticos, siendo útiles en contextos tales que no se conoce
un procedimiento exacto de resolución del problema, o bien éste requiere un gran
esfuerzo computacional. En ocasiones no es necesario obtener la solución óptima global
del problema, siendo suficiente con conocer una solución cercana a dicho óptimo.
Finalmente, y a efectos de ajustes finales en el cálculo de trayectorias se deben
encontrar cuatro parámetros denominados factores de ajuste, como se indica en los
STANAG 4355 y STANAG 4144, para la correcta modelización numérica según el
Modelo Modificado de Masa Puntual para proyectiles base burn. Este ejercicio se
resolverá
aplicando
los
mismos
algoritmos
comentados
anteriormente
pero
particularizados a esta situación aunque, como puede preverse, constituye un problema
de rango inferior.
XII.-7
3. Proyectiles base burn método 1
Se enumeran a continuación los coeficientes base burn para proyectiles base burn
método 1. Estos coeficientes se han separado en dos grupos atendiendo a su dificultad,
los primeros de ellos son los más simples y se reflejan a continuación. Los segundos
merecen un estudio más exhaustivo.
Símbolo
IXB
mCB0
mf
ρp
XCG0
XCGB
Descripción
Momento de inercia axial al
finalizar el quemado del
propulsante
Masa de propulsante del
motor quemada en el tubo
Masa de propulsante del
motor
Densidad del propulsante
del motor base burn
Distancia inicial del centro
de masas a la ojiva
Distancia del centro de
masas a la ojiva, al finalizar
el quemado del propulsante
Texto
IXB
Unidad
Dependencia
kgm2
MCB0
kg
MFUEL
kg
RHOP
kg/m3
XCG0
m
XCGB
m
carga
Si no se conocen los momentos de inercia, tanto el momento de inercia axial IX como el
momento de inercia axial al finalizar el quemado del propulsante IXB, pueden estimarse
a partir de proyectiles asistidos semejantes, como ya se estudió en análisis previos.
La masa de propulsante del motor quemada en el tubo mCB0 puede estimarse de
proyectiles asistidos semejantes; no obstante, su valor es muy pequeño y puede
considerarse nulo en primera aproximación. El ajuste del resto de coeficientes absorberá
la diferencia mínima que se produzca.
Usualmente, la masa de propulsante del motor mf es dato pero si no lo fuera, podría
estimarse dentro del proceso de optimización con el resto de coeficientes; no obstante,
la masa de propulsante del motor depende del tiempo de extinción del motor base burn.
Este dato resulta fácilmente medible mediante diversos dispositivos empleados en las
experiencias.
XII.-8
La densidad del propulsante del motor base burn ρp es dato una vez conocido el tipo de
propulsante. Si no se conociera, se puede estimar de proyectiles base burn semejantes o
bien de tablas:
XII.-9
La distancia inicial del centro de masas a la ojiva XCG0 y la distancia del centro de masas
a la ojiva al finalizar el quemado del propulsante XCGB, pueden estimarse a partir de
proyectiles asistidos semejantes, como ya se estudió en análisis previos
Los coeficientes base burn que se relatan a continuación son los más complejos de
determinar y ya en si mismos constituyen un estudio de relevancia mayor, por lo que se
examinaran cada uno por separado a fin de efectuar un estudio exhaustivo.
Símbolo
CxBB
I0
Descripción
Texto
Coeficiente de reducción de CXBB
resistencia BB
Parámetro de inyección de I0
eficiencia óptima del motor
base burn
XII.-10
Unidad
-
Dependencia
Mach
Mach
Símbolo
SC
Descripción
Texto
Área de combustión del SC
propulsante base burn
Velocidad de combustión VC
del propulsante base burn
VC
Texto
CXBB
Unidad
2
m
m/s
Dependencia
propulsante
quemado
MT, p,
presión
Nota
Polinomio función del número de Mach
a0 + a1M + a2M2 + a3M3 + a4M4
para diferentes intervalos del número de Mach. Los intervalos deben
introducirse en orden ascendente con el formato
I0
CXBB Mmin
Mmax
a0
a1
a2
a3
Polinomio lineal función del número de Mach
a4
a0 + a1M
para diferentes intervalos del número de Mach. Los intervalos deben
introducirse en orden ascendente con el formato
I0
SC
Mmin
Mmax
a0
a1
Polinomio lineal función de la masa de propulsante quemada en el motor
(mCB)
a0 + a1 mCB
para diferentes intervalos de mCB. Los intervalos deben introducirse en orden
ascendente con el formato
VC
SC mCB,min
a0
a1
mCB,max
La velocidad de combustión viene dada por
VC0eβ(MT-21) kPnK(p)
donde MT es la temperatura de propulsante del motor (°C), P es la presión
ambiente (Pascal) y p es velocidad de rotación axial del proyectil (rad/s). K(p)
tiene una entrada separada. El rango de temperaturas validas puede
introducirse con el formato
VC
VC0
β
k
n
MTmin
MTmax
Para establecer correspondencia entre los resultados obtenidos computacionalmente y
las experiencias observadas, se aplican los factores de ajuste.
XII.-11
Símbolo
f(iBB, MT)
Descripción
Factor base burn
K(p)
Factor de quemado con la KP
velocidad de rotación axial
Tiempo de retraso a la TDI
ignición del motor base
burn
tDI
Texto
FIBB
Texto
Unidad
-
FIBB
-
Dependencia
MT, QE,
carga
carga, p
s
MT, carga
Nota
Polinomio función de la temperatura de propulsante del motor y del ángulo de
tiro, para cada carga
a0 + a1QE + a2QE2 + a3QE3 + b1(MT-21) + b2(MT-21)2 + b3(MT-21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en °C)
y QE (ángulo de tiro en milésimas), para una carga dada. Los intervalos de
temperatura deben introducirse en orden ascendente con el formato
KP
FIBB MTmin
MTmax a0
a1
a2
a3
b1
b2
b3
Polinomio lineal función de la velocidad de rotación axial del proyectil, para
cada carga
a0 + a1p
Donde p es la velocidad de rotación axial (rad/s). El formato es
TDI
KP
a0
a1
Polinomio función de la temperatura de propulsante del motor, para cada carga
a0 + a1 (MT - 21) + a2 (MT - 21)2 + a3 (MT - 21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en
°C), para una carga dada. Los intervalos de temperatura deben introducirse en
orden ascendente con el formato
TDI MTmin
MTmax
a0
a1
a2
a3
Parámetro
Símbolo
Tiempo de retraso a la
tDI
ignición del motor base burn
Factor de quemado con la
K(p)
velocidad de rotación axial
Factor base burn
f(iBB,MT)
XII.-12
Unidad
Límites típicos
s
-
-
-
-
-
3.1. Área de combustión del propulsante base burn SC
El área de combustión del propulsante base burn consiste en el conjunto de todas las
superficies del propulsante que estén expuestas a la combustión (y que no están
inhibidas de alguna manera). El área de combustión del propulsante base burn depende
de la geometría del grano y del uso de inhibidores.
El propulsante utilizado puede ser una composición simple con dos constituyentes
principales; combustible y oxidante, aunque pueden encontrarse propulsantes
compuestos con una composición más compleja y contener oxidantes de varios tipos.
Pueden existir otros aditivos en pequeños porcentajes que pueden controlar la velocidad
de quemado, acelerándola o ralentizándola.
Sin importar su composición, todos los propulsantes son procesados en una forma
geométrica similar llamada grano propulsante. Como regla, los granos propulsantes son
de forma cilíndrica para encajar perfectamente dentro de la unidad base burn con el fin
de maximizar la eficiencia volumétrica.
El núcleo puede tener una amplia variedad de formas como circular, estrella, cruz,
hueso, etc. aunque la forma más común es la circular. La forma del núcleo tiene una
profunda influencia en la forma del perfil de la derivada de la masa de propulsante del
motor en función del tiempo.
La derivada de la masa de propulsante del motor m& f es proporcional al área de
combustión del propulsante base burn en cualquier instante de tiempo. El área de
combustión del propulsante en cualquier punto sigue la dirección normal a la superficie
en ese punto y ocurre de manera uniforme a lo largo de toda el área superficial expuesta
a la combustión, siendo el resultado una relación entre el área de combustión del
propulsante y la distancia de avance quemada, la cual depende casi exclusivamente de la
forma inicial del grano y de los inhibidores.
Así, conocida la geometría de la unidad base burn y la velocidad de quemado del
propulsante, es posible calcular el área de combustión del propulsante base burn en
XII.-13
función de la masa de propulsante quemado SC(mCB):
SC = ai + bi ⋅ mCB
mB = m0 − m f
mCB = m0 − m
mCBi < mCB ≤ mCBi+1
donde ai y bi se definen sobre regiones de mCB desde mCBi=0 hasta mCBi=n inclusive.
Si no se conoce la geometría de la unidad base burn, puede estimarse el área de
combustión del propulsante base burn SC(mCB) de proyectiles base burn semejantes,
partiendo de la hipótesis de que las unidades base burn son similares. Dado que el
objetivo prioritario es encontrar los parámetros que mejor ajusten alcance y deriva
dentro de un proceso de optimización, cabe preguntarse hasta que punto el hecho de
sustituir virtualmente una unidad base burn por otra de un proyectil base burn semejante
afectará al alcance y a la deriva.
Dado que la masa de propulsante del proyectil mf varía de unos proyectiles a otros y que
el área de combustión del propulsante vendrá afectado por la masa de propulsante del
proyectil, es necesario aplicar la teoría de análisis dimensional a la ecuación que expresa
el área de combustión del propulsante base burn como función de la masa de
propulsante quemado. Aplicando el teorema π de Vaschy y Buckingham, lo más lógico
es adimensionalizar la masa de propulsante quemada en el motor mCB con la masa de
propulsante del proyectil mf. En cuanto al área de combustión del propulsante base burn,
se va a adimensionalizar con una superficie de referencia que se analizará
posteriormente.
⎛ b
⎞ m
SC
a
= i + ⎜ i m f ⎟ ⋅ CB
⎟ m
S ref S ref ⎜⎝ S ref
f
⎠
XII.-14
Reescribiendo la ecuación anterior en términos de magnitudes adimensionales:
S C = S C* ⋅ S ref , ai* =
b
ai
m
*
, bi* = i m f , mCB
= CB
S ref
S ref
mf
( )
*
*
S C* mCB
= ai* + bi* ⋅ mCB
Si la unidad base burn se concentra en el culote del proyectil en forma de disco, la
superficie de referencia Sref debería ser el diámetro de la base del proyectil al cuadrado.
S ref = d b2
Aplicando la anterior ecuación a los proyectiles base burn semejantes, se tiene:
La separación mostrada por el proyectil OE155BONUS FR CBL/DUP hace pensar que
la unidad base burn no se concentra en un disco en el culote. Dado que no se conoce
XII.-15
como es la geometría de las unidades base burn y que se desea obtener una expresión
que, con carácter general, sirva para todos los proyectiles base burn, se va a repetir el
proceso anterior suponiendo que la unidad base burn no tiene una dimensión
predominante presentando un aspecto de cuasiesfera. Así, considerando la superficie de
referencia Sref como
S ref
⎛ mf
=⎜
⎜ρ
⎝ p
⎞
⎟
⎟
⎠
2
3
y aplicando esta superficie de referencia a los proyectiles base burn semejantes, se tiene:
Donde se puede comprobar que el resultado obtenido presenta una agrupación más
uniforme. El siguiente paso es investigar como afectaría el sustituir virtualmente una
unidad base burn por otra de un proyectil base burn semejante en el cálculo del alcance
y la deriva, dado que el objetivo prioritario es determinar los parámetros que mejor
ajusten alcance y deriva al aplicar un algoritmo de optimación. Considerando todas las
unidades base burn disponibles (se ha descartado la del proyectil noruego OEF3BB NO
XII.-16
HEA BB1 ya que es la misma que la del proyectil francés OE155F2RTC FR HEA BB1)
y disparando con todas las cargas y a cinco ángulos de tiro distintos (300, 500, 700, 900
y 1200 milésimas), se ha calculado la diferencia porcentual en alcance y deriva al
intercambiar las unidades base burn: (alcance – alcanceBB)/alcance y (deriva –
derivaBB)/deriva. Estos resultados se han resumido en la tabla que se anexa a
continuación reflejando únicamente el mayor valor encontrado para todas las cargas y
ángulos de tiro analizados:
Alcance
Proyectil
OE155F2RTC
Unidad base burn
OE155BONUS
OE155F2RTC FR HEA BB1
0.00 %
0.68 %
OE155BONUS FR CBL/DUP BB1
1.12 %
0.00 %
ER-02/BB SP HEA BB1
- 0.79 %
0.34 %
Deriva
Proyectil
OE155F2RTC
Unidad base burn
OE155BONUS
OE155F2RTC FR HEA BB1
0.00 %
1.29 %
OE155BONUS FR CBL/DUP BB1
-1.25 %
0.00 %
ER-02/BB SP HEA BB1
- 1.69 %
0.48 %
A la vista de las diferencias obtenidas y del aspecto que presentan las diferentes áreas de
combustión del propulsante base burn SC(mCB), se plantea reducir aún más estas
diferencias efectuando una homotecia de dirección el eje vertical sobre la curva del área
de combustión del propulsante base burn adimensional de un proyectil base burn
semejante introduciendo un nuevo coeficiente que deberá ser ajustado.
( )
( )
*
*
S C* mCB
= S C0 ⋅ S C* mCB
proyectil⋅semejante
Aunque pudiera parecer que es necesario disponer de información proporcionada por
proyectiles base burn semejantes; sin embargo, la robustez del método permite trabajar
XII.-17
sobre otro tipo de curva que se plantee como área de combustión de propulsante base
burn.
Avanzando sobre este concepto y recordando la definición de la derivada de la masa de
propulsante del motor m& f
m& = − m& f
m& = −VC ⋅ ρ p ⋅ SC (mCB )
VC = VC0 ⋅ f (MT ) ⋅ g (P ) ⋅ K ( p )
f (MT ) = e β ( MT − 21)
g (P ) = k ⋅ P n
Rearreglando, se tiene
m& = −VC0 ⋅ e β ( MT − 21) ⋅ k ⋅ P n ⋅ K ( p ) ⋅ ρ p ⋅ S C (mCB )
donde no se conocen los factores VC0, β, k, y n. K(p) es un factor de ajuste y se tratará
posteriormente y ρp ya se trató anteriormente. El factor β tiene en cuenta la desviación
producida cuando la temperatura de propulsante del motor MT se separa de los 21 º C y
su análisis requiere del conocimiento de experiencias efectuadas a diferentes
temperaturas de propulsante del motor, por lo que no ha sido objeto de este trabajo,
pudiendo estimarse de proyectiles base burn semejantes aunque si se dispara a
temperaturas cercanas a 21 º C el efecto es nulo.
Si se considera, análogamente a como se hizo antes, introducir dos nuevos coeficientes
basados en proyectiles base burn semejantes
XII.-18
( )
VC0 = VC00 ⋅ VC0
proyectil ⋅semejante
k = k0 ⋅ k proyectil ⋅ semejante
Obsérvese que esto únicamente constituye un cambio en la escala, dado que VC0 y k son
escalares y se introducen únicamente para identificar más apropiadamente el factor SC0.
Introduciendo las expresiones anteriores, se tiene
( )
m& = −VC 00 VC 0
proyectil ⋅ semejante
( )
*
⋅ e β ( MT − 21) ⋅ k0 ⋅ k proyectil ⋅ semejante ⋅ P n ⋅ K ( p ) ⋅ ρ p ⋅ SC0 ⋅ S ref ⋅ SC* mCB
proyectil ⋅ semejante
Agrupando los términos a ser ajustados en uno único
S C0 = VC00 ⋅ k 0 ⋅ S C0
{( )
m& = − SC0 VC 0
p⋅s
[
]
} [
( ) ]
*
⋅ e β ( MT − 21) ⋅ k p ⋅ s ⋅ P n ⋅ K ( p ) ⋅ ρ p ⋅ S ref ⋅ SC* mCB
p⋅s
Así, finalmente se tiene que el área de combustión del propulsante base burn depende
directamente de los términos SC0 y n. Estos dos elementos constituyen los parámetros a
ser ajustados en el proceso de optimización posterior que han sido aportados por el área
de combustión del propulsante base burn. Los análisis efectuados con la información
existente muestran que el término SC0 puede sufrir variaciones del orden del 10 %
mientras que n toma valores del orden de 0.76 , si bien estos valores son valores típicos
únicamente ya que al aplicar el algoritmo de optimización correspondiente se debe
permitir un mayor movimiento para aumentar la probabilidad del éxito. La velocidad de
combustión de propulsante base burn VC es muy sensible al efecto del término n,
condicionando enormemente el tiempo de extinción del motor base burn. Este efecto
será necesario tenerlo en cuenta a la hora de seleccionar apropiadamente la función
objetivo en el proceso de optimación posterior.
XII.-19
3.2. Coeficiente de reducción de resistencia base burn CxBB
El cambio en aceleración, debida a la reducción de resistencia de base de un motor base
burn BB& , durante la fase de quemado ( t DI ≤ t y m ≥ mB , siendo tDI el tiempo de retraso
a la ignición del motor base burn y mB la masa del proyectil al finalizar el quemado del
propulsante), se adiciona a la ecuación del movimiento del centro de masas del proyectil
r
r
F = mu&& :
⎤
⎡⎛ π ⎞
2
2
⎢ ⎜ 8 ⎟ ⋅ ρ ⋅ d ⋅ v ⋅ C xBB ⋅ f (I ) ⋅ f (iBB , MT ) ⎥⎛ vr ⋅ cos α
r ⎞
e
⎥⎜
BB& = ⎢ ⎝ ⎠
+αe ⎟
m
v
⎥⎝
⎢
⎠
⎥
⎢
⎦
⎣
El coeficiente CxBB es el coeficiente de reducción de resistencia durante la fase de
quemado. Se conceptúa como cualquier otro coeficiente aerodinámico, los valores de
estos coeficientes vienen dados por funciones polinómicas de orden cuatro (o inferior)
del número de Mach.
Resultan de gran interés los estudios realizados por Chargelegue y Couloumy de la
Direction de Armaments Terrestres a finales de los ochenta. Empleando un radar
doppler de seguimiento se dispararon setenta y cuatro proyectiles base burn con
diferentes cargas, ángulos de tiro y temperaturas de propulsante del motor. Mediante un
programa informático se obtenía el coeficiente de reducción de resistencia base burn en
función del número de Mach. Estos trabajos fueron expuestos en el 11º Simposio
Internacional de Balística celebrado en Bruselas en 1989.
En este aspecto, debe tenerse en cuenta que estos estudios se realizaron en 1986 y 1987,
siendo precursores del STANAG 4355, y empleando una expresión ligeramente
simplificada del cambio en aceleración debida a la reducción de resistencia de base del
motor base burn durante la fase de quemado BB& :
BB& =
r
1
ρ ⋅ S ⋅ v ⋅ v ⋅ C xBB (M , I , P, MT ,K)
2m
XII.-20
Designando como CxBB(M,I,P,MT,…) el coeficiente de reducción de resistencia base
burn manejado por Chargelegue y Couloumy y CxBB el coeficiente de reducción de
resistencia base burn que aparece en el STANAG 4355, se pueden comparar ambos
términos.
r
r
v
⎛ v ⋅ cos α e r ⎞
C xBB (M , I , P, MT ,K) = C xBB ⋅ f (I ) ⋅ f (iBB , MT )⎜
+ αe ⎟
v
v
⎝
⎠
siendo M el número de Mach, I el parámetro de inyección de propulsante en el motor
base burn, P la presión del aire atmosférico local y MT la temperatura de propulsante
del motor en °C. A efectos simplificatorios se ha supuesto que la superficie de
referencia S se corresponde con π d 2 4 .
Si se considera el ángulo de ataque αe suficientemente pequeño, se tiene en primera
aproximación
C xBB (M , I , P, MT ,K) ≈ C xBB ⋅ f (I ) ⋅ f (iBB , MT )
Puede observarse como el coeficiente de reducción de resistencia base burn empleado
por Chargelegue y Couloumy CxBB(M,I,P,MT,…) constituye un coeficiente “global” de
reducción de resistencia base burn. Estos investigaron ya indicaron entonces la
existencia de un flujo de masa óptimo, por encima del cual, este coeficiente “global” de
reducción de resistencia base burn CxBB(M,I,P,MT,…) solo depende del número de
Mach.
Chargelegue y Couloumy obtuvieron la siguiente figura que presenta el coeficiente
global de reducción de resistencia base burn CxBB(M,I,P,MT,…), para un proyectil DTC,
con temperatura de propulsante del motor de 21 º C, mostrando la dependencia que
presenta CxBB(M,I,P,MT,…) con el número de Mach.
XII.-21
Chargelegue y Couloumy pensaron que como la velocidad de combustión de
propulsante base burn VC está afectada por la temperatura de propulsante del motor,
podría ocurrir que el coeficiente global de reducción de resistencia base burn
CxBB(M,I,P,MT,…) también estuviese afectado por la temperatura de propulsante del
motor. Por ello, representaron el coeficiente global de reducción de resistencia base
burn CxBB(M,I,P,MT,…) a diferentes temperaturas de propulsante del motor, mostrando
que el efecto de la temperatura modifica muy débilmente la dispersión del coeficiente
global de reducción de resistencia base burn. Separando este efecto, Chargelegue y
Couloumy sugirieron que existe un flujo de masa óptimo por encima del cual, el
coeficiente global de reducción de resistencia base burn CxBB(M,I,P,MT,…) solo
depende del número de Mach.
XII.-22
Finalmente, Chargelegue y Couloumy obtuvieron el coeficiente global de reducción de
resistencia base burn CxBB(M,I,P,MT,…) a través de un procedimiento mediante la
diferencia de dos términos obtenidos de experimentos; Cx(M,I,P,MT,…) con bloque
propulsante a 21 º C (CxABB) y Cx(M,I,P,MT,…) sin bloque propulsante (CxSBB)
C x BB (M , I , P, MT ,K) = C x SBB − C x ABB
Las tres gráficas CxBB(M,I,P,MT,…), CxABB y CxSBB, como función del número de Mach,
pueden verse en la siguiente figura. CxBB(M,I,P,MT,…) se expresa como un conjunto de
funciones polinómicas del número de Mach con grado inferior a cuatro.
A continuación se puede examinar el coeficiente de reducción de resistencia base burn
CxBB de los proyectiles de artillería OE155F2RTC FR HEA BB1, OE155BONUS FR
CBL/DUP BB1 y OEF3BB NO HEA BB1.
XII.-23
XII.-24
En las anteriores gráficas puede observarse el incorrecto acoplamiento de las curvas en
la zona intermedia próxima al número de Mach unidad con el consiguiente problema de
valores anómalos. Con el método desarrollado en esta tesis, este problema no se
producirá.
Si no se conoce el coeficiente de reducción de resistencia base burn CxBB, puede
efectuarse una estimación de esta función a partir de alguna función similar conocida. El
método de Rayleigh Ritz plantea sustituir la función buscada por una combinación
lineal de funciones linealmente independientes bien condicionadas y conocidas, que
están ponderadas por unos coeficientes a determinar mediante métodos variacionales
ψ = c1 ⋅ f1 + K + cn ⋅ f n
Para la determinación de los n coeficientes hay que imponer n condiciones.
Primeramente debe decidirse acerca de cual es el valor más adecuado para el número n.
Téngase en cuenta que si bien incrementar este valor mejorará la definición de la curva,
XII.-25
también impondrá unas penalizaciones excesivas al necesitar más ecuaciones para
determinar los coeficientes.
El incremento del número de parámetros de los que depende la función a optimizar,
provoca de una manera casi indefectible la aplicación de algoritmos heurísticos, dada la
enorme dificultad que supone el obtener la solución exacta mediante métodos de
optimización puramente analíticos. No obstante, debe tenerse en cuenta que aunque
estas herramientas tienen una gran potencia, el entorno de búsqueda es tremendamente
hostil con múltiples óptimos cercanos. Esto permite asegurar que el procedimiento de
resolución será mucho más favorable en la medida que el número de parámetros de los
que depende la función a optimizar sea lo más reducido posible.
Así, se debe establecer una solución de compromiso de forma que la curva se encuentre
suficientemente bien definida y representada con un número no muy elevado de
parámetros. Finalmente se ha optado por una representación definida por cuatro puntos;
(M0, CxBB0), (M1, CxBB1), (M2, CxBB2), y (M3, CxBB3) como se indica en la figura. La
elección de los números de Mach M0, M1, M2 y M3 dependerá del problema concreto a
resolver; no obstante, M0 se toma un número de Mach ligeramente inferior a la unidad y
M1 un número de Mach ligeramente superior a la unidad.
La curva se ajusta entre M1 y M3 con una parábola que pasa por los puntos 1, 2 y 3.
Entre M0 y M1 se emplea otra parábola que pasa por los puntos 0 y 1 y tenga la misma
pendiente en el punto 1 que la primera parábola. Para números de Mach inferiores a M0
se toma un valor constante y en el punto 0 se utiliza un radio de acuerdo que suavice el
cambio de tramo.
El objetivo prioritario es encontrar los parámetros que mejor ajusten alcance y deriva,
dentro de un proceso de optimización. No obstante, el número de parámetros a ajustar
en el proceso de optimización posterior puede resultar ligeramente alto lo que va a
provocar que la función de optimización presente un entorno complicado con múltiples
óptimos cercanos.
XII.-26
XII.-27
El incremento del número de parámetros de los que depende la función de optimización
configura un entorno de búsqueda complejo con múltiples óptimos cercanos. Esto
direcciona a la necesidad de utilizar algoritmos heurísticos, ante la gran dificultad de
aplicar métodos clásicos analíticos. En este sentido, aunque las herramientas heurísticas
tienen una gran capacidad para resolver problemas, es necesario establecer medidas de
apoyo a la resolución. Se debe limitar cuidadosamente el campo de actuación de cada
uno de los parámetros de los que depende la función objetivo, así como las condiciones
iniciales de iteración, para lo cual es necesario disponer de una extensa experiencia,
disponiendo de un grupo de proyectiles base burn semejantes convenientemente bien
caracterizados. En este sentido, se han instalado una serie de filtros a fin de definir más
apropiadamente la naturaleza del problema; CxBB3 < CxBB2, CxBB2 < CxBB1, CxBB0 < CxBB1,
la pendiente del segmento CxBB1CxBB2 debe ser inferior a la pendiente del segmento
CxBB2CxBB3 (parábola 123 cóncava) y la pendiente entre el número de Mach cero y el M0
es nula.
Elegidos los números de Mach M0, M1, M2 y M3 de acuerdo al problema concreto a
resolver, que vendrá influenciado por la propia experiencia que se tenga en la
XII.-28
configuración proyectil arma carga, se deben encontrar los parámetros CxBB0, CxBB1,
CxBB2, y CxBB3 que mejor se adapten a los datos extraídos de experiencias en un proceso
de optimización.
El siguiente punto es investigar hasta que punto el hecho de sustituir la curva original
correspondiente al coeficiente de reducción de resistencia base burn CxBB por una curva
parabólica por tramos similar, afectará al alcance y a la deriva. Considerando los
proyectiles OE155F2RTC FR HEA BB1 y OE155BONUS FR CBL/DUP BB1 (no se
ha considerado el proyectil noruego OEF3BB NO HEA BB1 ya que es el mismo que el
proyectil francés OE155F2RTC FR HEA BB1) y disparando con todas las cargas y a
cinco ángulos de tiro distintos (300, 500, 700, 900 y 1200 milésimas), se ha calculado la
diferencia porcentual entre utilizar el coeficiente de reducción de resistencia base burn
CxBB por la curva parabólica por tramos indicada anteriormente; (alcance –
alcancepol)/alcance y (deriva – derivapol)/deriva. Estos resultados se han resumido en la
tabla que se anexa a continuación reflejando únicamente el mayor valor encontrado para
todas las cargas y ángulos de tiro analizados:
Proyectil
Alcance
Deriva
OE155F2RTC FR HEA BB1
0.08 %
0.22 %
OE155BONUS FR CBL/DUP BB1
- 0.49 %
- 0.40 %
Con respecto a las diferencias obtenidas en la tabla anterior, se debe indicar que son
meramente ilustrativas, dado que la curva parabólica por tramos con la que se han
efectuado los cálculos es una curva obtenida geométricamente a partir de las curvas
originales. Realmente, la determinación de los parámetros CxBB0, CxBB1, CxBB2, y CxBB3
que mejor ajusten alcance y deriva, empleando el algoritmo de optimización
desarrollado, mostrará posteriormente que estas diferencias son prácticamente nulas.
3.3. Parámetro de inyección de eficiencia óptima I0
La función de variación del flujo del motor base burn viene dada por:
XII.-29
f (I ) = I I 0 si I ≤ I 0
f (I ) = 1 si I ≥ I 0
donde I es el parámetro de inyección de propulsante en el motor base burn
I=
4 ⋅ m& f
π ⋅ d b2 ⋅ ρ ⋅ v
donde m& f es la derivada de la masa de propulsante del motor y db el diámetro de la base
del proyectil. I0 es el parámetro de inyección de eficiencia óptima del motor base burn,
que es función del número de Mach y que se puede tomar como un polinomio de un
grado o inferior. Se define sobre regiones de números de Mach, desde M MAX i−1 hasta
M MAX i inclusive.
Como ya se comentó anteriormente, los estudios realizados por Chargelegue y
Couloumy apuntaron que existe un flujo de masa óptimo por encima del cual, el
coeficiente global de reducción de resistencia base burn CxBB(M,I,P,MT,…) solo
depende del número de Mach. Estos investigadores utilizan el primer grupo de disparos
para calcular el parámetro de inyección de eficiencia óptima del motor base burn I0.
XII.-30
Cuando el parámetro de inyección de propulsante en el motor base burn I es mayor que
el parámetro de inyección de eficiencia óptima I0, el coeficiente “global” de reducción
de resistencia base burn solo depende del número de Mach. Cuando empieza a agotarse
el propulsante, el parámetro de inyección de propulsante en el motor base burn I se
vuelve más pequeño que el parámetro de inyección de eficiencia óptima I0, y este
coeficiente “global” de reducción de resistencia base burn cae rápidamente. La función
de variación del flujo del motor base burn f(I) se usa para modelizar este
comportamiento de caída brusca del coeficiente “global” de reducción de resistencia
base burn:
C xBB (M , I , P, MT ,K) ≈ C xBB ⋅ f (I ) ⋅ f (iBB , MT )
A continuación se puede examinar el parámetro de inyección de eficiencia óptima I0 de
los proyectiles de artillería OE155F2RTC FR HEA BB1 y OE155BONUS FR
CBL/DUP BB1 (no se ha considerado el proyectil noruego OEF3BB NO HEA BB1 ya
que es el mismo que el proyectil francés OE155F2RTC FR HEA BB1).
XII.-31
Donde puede apreciarse como el parámetro de inyección de eficiencia óptima I0 toma la
forma de una poligonal con pendientes negativas.
Al principio de la trayectoria, inmediatamente después del momento del disparo, el
parámetro de inyección de propulsante en el motor base burn I es mayor que el
parámetro de inyección de eficiencia óptima I0, de forma que la función de variación del
flujo del motor base burn es la unidad siendo el coeficiente global de reducción de
resistencia base burn una función dependiente únicamente del número de Mach. Cuando
el propulsante empieza a agotarse, el parámetro de inyección de propulsante en el motor
base burn I se vuelve más pequeño que el parámetro de inyección de eficiencia óptima
I0, y el coeficiente global de reducción de resistencia base burn cae rápidamente, siendo
la función de variación del flujo del motor base burn f(I) la que refleja este
comportamiento de caída brusca del coeficiente global de reducción de resistencia base
burn. Esta forma de actuar viene regulada por el parámetro de inyección de eficiencia
óptima I0 que debe proceder de la manera que se ha relatado anteriormente para todas
las cargas y todos los ángulos de tiro. Una mala elección del parámetro de inyección de
XII.-32
eficiencia óptima I0 puede provocar que al comienzo de la trayectoria el parámetro de
inyección de propulsante en el motor base burn I se vuelva más pequeño que el
parámetro de inyección de eficiencia óptima I0 para alguna carga o algún ángulo de tiro,
produciendo una caída abrupta al comienzo de la trayectoria totalmente contraria a lo
que se pretendía.
Al separar el coeficiente “global” de reducción de resistencia base burn
CxBB(M,I,P,MT,…) en tres términos; el coeficiente de reducción de resistencia base burn
CxBB, la función de variación del flujo del motor base burn f(I) y el factor base burn
f(iΒΒ,MT) (factor de ajuste que será calculado en un proceso posterior), se debe calcular
primeramente la función de variación del flujo del motor base burn f(I) cumpliendo las
condiciones que se han descrito en el párrafo anterior, para posteriormente determinar el
coeficiente de reducción de resistencia base burn CxBB.
C xBB (M , I , P, MT ,K) ≈ C xBB ⋅ f (I ) ⋅ f (iBB , MT )
De este modo, la función de variación del flujo del motor base burn f(I) sirve para
expresar la caída brusca que sufre el coeficiente global de reducción de resistencia base
burn cuando el propulsante del motor empieza a agotarse. Así, el coeficiente de
reducción de resistencia base burn CxBB es el encargado de expresar un ajuste exacto a lo
largo de la trayectoria del proyectil a partir de la función de variación del flujo del
motor base burn f(I). Esto no significa que la determinación de la función de variación
del flujo del motor base burn f(I) sea un trabajo simple ya que la caída abrupta que
soporta el coeficiente global de reducción de resistencia base burn debe ocurrir para
todas las cargas y todos los ángulos de tiro, y nunca al comienzo de la trayectoria.
Una vez analizado el comportamiento del parámetro de inyección de eficiencia óptima
I0, la acepción óptima no parece la más apropiada para el parámetro I0 dado su
funcionamiento de regulación que ejerce sobre el coeficiente global de reducción de
resistencia base burn CxBB(M,I,P,MT,…). Este calificativo puede provenir de una
traducción poco apropiada dado que Chargelegue y Couloumy lo designan como
parámetro de inyección característico I0, mucho más apropiado para la función
realizada.
XII.-33
A continuación se puede observar la comparativa entre el parámetro de inyección de
propulsante en el motor base burn I y el parámetro de inyección de eficiencia óptima I0
a lo largo de la trayectoria. En estas figuras puede apreciarse el fenómeno comentado
anteriormente. Al principio de la trayectoria, el parámetro de inyección de propulsante
en el motor base burn I es superior que el parámetro de inyección de eficiencia óptima
I0, de forma que la función de variación del flujo del motor base burn es la unidad.
Cuando el propulsante empieza a terminarse, el parámetro de inyección de propulsante
en el motor base burn I se vuelve más pequeño que el parámetro de inyección de
eficiencia óptima I0, y el coeficiente global de reducción de resistencia base burn cae
velozmente.
Estas gráficas se han impreso para los proyectiles de artillería OE155F2RTC FR HEA
BB1 y OE155BONUS FR CBL/DUP BB1 para la carga más alta, la más baja y una
intermedia, así como para cinco ángulos de tiro distintos (300, 500, 700, 900 y 1200
milésimas).
XII.-34
XII.-35
XII.-36
XII.-37
XII.-38
XII.-39
XII.-40
XII.-41
XII.-42
XII.-43
XII.-44
XII.-45
XII.-46
XII.-47
XII.-48
3.4. Implementación del método de cálculo
A continuación se va ha habilitar un método original de cálculo que constituye una de
las aportaciones de esta tesis, con el objeto de determinar los diferentes parámetros
necesarios para caracterizar apropiadamente el vuelo de un proyectil base burn
empleando el método 1.
Aunque el algoritmo de recocido simulado (SA) resulta mejor que al algoritmo genético
(GA) en cuanto a la precisión de los resultados obtenidos, presenta el inconveniente de
que requiere una labor de determinación (y por tanto de prueba y error) muy exhaustiva
de los parámetros. Esto implica un mayor tiempo de cálculo al tener que realizar ajustes
constantes para obtener buenos resultados. Este inconveniente no lo presenta el
algoritmo genético que aunque es menos preciso, es más robusto en este sentido, lo cual
condiciona la aplicación de ambos algoritmos. El algoritmo genético es más apropiado
para una fase incipiente del problema, cuando se tiene un mayor desconocimiento de los
resultados a obtener. Entonces, las soluciones obtenidas utilizando el algoritmo genético
se utilizan como valor de entrada para la aplicación del algoritmo de recocido simulado.
XII.-49
La sinergia de ambos algoritmos produce los efectos más potentes en la determinación y
resolución del problema.
El proceso de determinación de los diferentes parámetros que modelan el proceso de
quemado del propulsante así como de la reducción de la resistencia al aumentar la
presión en la base, constituye un procedimiento multipaso e iterativo donde
determinados unos parámetros (A), se debe acometer el cálculo de los siguientes (B),
con el consiguiente problema de que cuando se comienza el cálculo a la búsqueda de los
parámetros A es necesario presuponer los parámetros B, los cuales obviamente no se
disponen. He aquí donde es necesario acudir en ayuda de los proyectiles base burn
semejantes para estimar estos parámetros B previos. Cuanto más semejante sean estos
proyectiles, menor será el número de iteraciones a realizar. Este proceso debe repetirse
hasta alcanzar la precisión deseada.
Si no fuera dato la masa de propulsante del motor mf, podría estimarse dentro del
proceso de optimización con el resto de coeficientes; no obstante, la masa de
propulsante del motor depende del tiempo de extinción del motor base burn; es decir, de
la duración de la fase asistida, hecho que está íntimamente relacionado con la velocidad
a la que se consume el propulsante en el motor. La velocidad de combustión de
propulsante base burn VC es muy sensible al efecto del término n, condicionando
enormemente el tiempo de extinción del motor base burn. Un valor grande de n provoca
el apagado prematuro del motor base burn mientras que un valor pequeño produce un
apagado tardío. Este hecho habrá que tenerlo en cuenta a la hora de seleccionar
apropiadamente la función objetivo en el proceso de optimización. En definitiva, la
masa de propulsante del motor mf, el tiempo de extinción del motor base burn y el
término n que aparece en la expresión de la velocidad de combustión de propulsante
base burn VC se encuentran acoplados. Afortunadamente, el tiempo de extinción del
motor base burn es un dato fácilmente medible mediante diversos dispositivos
empleados en experiencias.
Se va a esquematizar todo el proceso de resolución en los siguientes pasos, suponiendo
que la masa de propulsante del motor mf es dato:
1. Inicialmente, se introduce el parámetro de inyección de eficiencia óptima
XII.-50
I0, teniendo en cuenta que al comienzo de la trayectoria el parámetro de
inyección de propulsante en el motor base burn I es mayor que el
parámetro de inyección de eficiencia óptima I0, lo cual ocurre hasta que
el propulsante del motor empieza a agotarse. En ese momento, el
parámetro de inyección de propulsante en el motor base burn I se vuelve
más pequeño que el parámetro de inyección de eficiencia óptima I0 y el
coeficiente global de reducción de resistencia base burn cae rápidamente.
Este comportamiento debe ocurrir para todas las cargas y todos los
ángulos de tiro. El resto de parámetros se pueden estimar de un proyectil
base burn semejante en la primera etapa del cálculo, si no se disponen de
otros datos.
2. Aplicar el algoritmo de optimación para determinar los términos SC0
(para ello se ha estimado previamente un área de combustión del
propulsante base burn S C* adimensional), n y 4CxBB (CxBB0, CxBB1, CxBB2,
y CxBB3). Obtenido el alcance, la deriva y el tiempo de extinción del
motor base burn de experiencias realizadas, se calculan los parámetros
SC0, n y 4CxBB que mejor aproximen el alcance, la deriva y el tiempo de
extinción del motor base burn. A través de experiencias realizadas se
obtiene el alcance, la deriva y el tiempo de extinción del motor base
burn, que se designaran como alcancei-exp, derivai-exp y tBi-exp para
diferentes ángulos de tiro y cargas, definiendo la función objetivo como
i=m
(
E = ∑ walc (alcancei − alcancei −exp ) + wder (derivai − derivai −exp ) + wt B t Bi − t Bi−exp
2
2
i =1
alcancei −exp = alcancei −exp (QEi , MVi )
derivai −exp = derivai −exp (QEi , MVi )
t Bi−exp = t Bi−exp (QEi , MVi )
(
alcancei = alcancei QEi , MVi , S C0 , n,4C xBB
(
derivai = derivai QEi , MVi , S C0 , n,4C xBB
XII.-51
)
)
)
2
(
t Bi = t Bi QEi , MVi , SC0 , n,4C xBB
)
siendo los términos alcancei, derivai y tBi los obtenidos como resultado
de haber realizado todo el proceso de cálculo en función de los
parámetros SC0, n y 4CxBB. Los parámetros walc, wder y wtB son factores de
peso que pueden ser diferentes dependiendo del paréntesis al que vayan a
afectar y que permiten favorecer un requisito en perjuicio de los otros.
Esto conlleva a que es necesario seleccionar el peso que afecta a cada
uno de los paréntesis.
Una característica muy importante de este problema es que se conoce a
priori el valor óptimo buscado de la función objetivo.
3. Volver al paso 1. y finalizar el proceso cuando se haya alcanzado la
precisión requerida.
La función objetivo se calcula como un sumatorio que depende de las triada de valores
alcancei-exp, derivai-exp y tBi-exp, función a su vez del ángulo de tiro y la carga, siendo m el
número total de triadas. Aunque puede preverse a simple vista que cuantos más valores
se dispongan de las experiencias realizadas, mejor será el procedimiento de ajuste,
también se debe tener en cuenta que mayor será el tiempo de cálculo. No obstante se
debe tener en cuenta que el coeficiente de reducción de resistencia base burn CxBB es
una función del número de Mach y que alcancei-exp, derivai-exp y tBi-exp dependen del
ángulo de tiro y la velocidad en boca del arma. Si se dispara con velocidades iniciales
elevadas y el ángulo de tiro no es muy grande, el proyectil no alcanzará números de
Mach bajos con lo que se habrá ajustado la parte de la curva CxBB correspondientes a
número de Mach altos pero no la parte correspondientes a números de Mach bajos; o
dicho de otra forma, en el proceso de optimización los números altos de Mach tendrán
un peso de ponderación mucho mayor que los números de Mach bajos pudiendo llegar
el caso que el peso de los números bajos de Mach sea muy pequeño. En esta situación,
los coeficientes CxBB0 y CxBB1 serán los más afectados ya que el valor obtenido no tendrá
mucha precisión en los resultados. Así, se debe intentar que la batería de triada de
valores alcancei-exp, derivai-exp y tBi-exp correspondan a ángulos de tiro y cargas tales que
XII.-52
los números de Mach altos tengan un peso de ponderación similar a los números de
Mach bajos. Esto también conlleva un inconveniente que es preciso evitar; si la
trayectoria es corta porque la carga y el ángulo de tiro son bajos, la unidad base burn
puede no llegar a su extinción ya que el impacto se produce antes de que se haya
consumido todo el propulsante con lo que el tiempo de extinción del motor base burn
será erróneo y el procedimiento de optimización funcionará de manera inexacta.
Ya se comentó anteriormente que la inclusión de la ordenada máxima en la función
objetivo introduce un empeoramiento en los coeficientes ajustados de esta forma. Si con
estos segundos coeficientes se calcula alcance y deriva, estos resultados son inferiores a
los obtenidos empleando coeficientes ajustados prescindiendo de la ordenada máxima
en la función objetivo. La razón es que la ordenada máxima es un parámetro que ante
variaciones en los coeficientes, experimenta variaciones mucho mayores que las
advertidas para alcance y deriva. Otro factor es que el Modelo Modificado de Masa
Puntual presenta dificultades para determinar la ordenada máxima, una vez ajustada la
deriva y el alcance, con datos obtenidos de experiencias reales.
Si no fuera dato la masa de propulsante del motor mf, el problema se abordaría
incorporando a los términos SC0, n y 4CxBB (CxBB0, CxBB1, CxBB2, y CxBB3) el propio mf y
realizando todo el proceso de la misma forma.
La experiencia adquirida en la realización de este trabajo advierte que el número de
parámetros a ajustar de los que depende la función objetivo resulta ligeramente alto (67). En la medida que se incrementan el número de parámetros de los que depende la
función a optimizar, el entorno de búsqueda se vuelve más complejo con múltiples
óptimos cercanos. Esto establece la necesidad de utilizar nuevos algoritmos ante la casi
imposibilidad de aplicar métodos clásicos tipo analíticos. En este sentido, aunque las
herramientas heurísticas tienen una gran potencia es necesario establecer normas de
apoyo en la resolución. Se debe limitar cuidadosamente el campo de actuación de cada
uno de los coeficientes de los que depende la función objetivo así como las condiciones
iniciales de iteración, para lo cual es necesario disponer de una amplia experiencia, por
lo que es tan importante disponer de una panoplia de proyectiles base burn semejantes
convenientemente bien caracterizados. Una vez abordado el problema y en un estadio
incipiente de resolución, es más conveniente atacar su resolución empleando el
XII.-53
algoritmo genético que aunque no es tan preciso como el algoritmo de recocido
simulado requiere una menor carga de trabajo. Es entonces cuando la solución obtenida
empleando el algoritmo genético se utiliza como valor de entrada en el algoritmo de
recocido simulado, con el objetivo de obtener una mayor precisión en la resolución del
problema, ya que aunque este algoritmo es más preciso requiere una mayor labor de
determinación (y por tanto de prueba y error) de determinados parámetros, lo que
implica mayor tiempo de cálculo al tener que realizar ajustes constantes para obtener
buenos resultados.
Esta fase es previa a la determinación de los factores de ajuste pero es necesario
introducir valores para proceder al cálculo, por lo que para el tiempo de retraso a la
ignición del motor base burn tDI se introducirá el valor correspondiente en el supuesto
de que se conozca. Sino se conociera, se considerará tDI = 0 siendo el resto de valores
K(p) = 1 , f(iBB,MT) = 1 y fL = 1 . Téngase en cuenta que el tiempo de retraso a la
ignición del motor base burn tDI es un valor fácilmente medible en experiencias.
Como ya se comentó anteriormente, el algoritmo de integración utilizado ha sido el
Runge Kutta 45, los parámetros eRK, hmin y hmax se han elegido para obtener una
precisión inferior a un metro en el cálculo de la deriva y el alcance: hmin = 0.04 s, hmax =
6.0 s y eRK = 0.1 .
Se ha considerado apropiado para este cálculo la siguiente condición de parada; L =
200, K1 = 5, ∈1 = 0.5 , K2 = 5, ∈2 = 0.5 y M = 5000.
Una vez configurados adecuadamente los coeficientes base burn, se deben determinar a
efectos de ajustes finales los factores de ajuste, para la correcta modelización numérica
según el Modelo Modificado de Masa Puntual para proyectiles base burn método 1.
Aplicando el algoritmo de optimación, se deben determinar los factores de ajuste tDI,
K(p), f(iBB,MT) y fL utilizando para ello datos de experiencias.
En este trabajo no se ha tenido en cuenta la dependencia con la temperatura de
propulsante del motor MT, utilizando como valor de referencia MT = 21 . La obtención
de valores de temperatura de propulsante del motor extraídos de experiencias es una
labor ardua, dado que estos valores están sujetos a las condiciones climatológicas del
XII.-54
momento, y es necesario disponer de un amplio abanico de valores, por lo que no ha
sido objeto de este trabajo, pudiendo estimarse de proyectiles base burn semejantes,
aunque si se dispara a temperaturas de propulsante del motor cercanas a 21 º C, el efecto
es nulo.
Para cada carga; únicamente el factor base burn f(iBB,MT) y el factor de sustentación fL
son funciones del ángulo de tiro, siendo el tiempo de retraso a la ignición del motor base
burn tDI función de la temperatura de propulsante del motor MT y el factor de quemado
con la velocidad de rotación axial del proyectil K(p) una función lineal de la velocidad
de rotación axial del proyectil p.
El alcance disminuye al aumentar tDI, al aumentar K(p) o/y al disminuir f(iBB,MT),
aunque la contribución más importante es esta última por lo que puede decirse que el
alcance viene afectado fundamentalmente por el factor base burn. La deriva es muy
poco sensible a tDI (aunque disminuye al aumentar tDI) disminuyendo al aumentar K(p)
o/y al disminuir f(iBB,MT). De cualquier forma, numéricamente, todos los parámetros se
encuentran acoplados.
Dado que K(p) depende de cada carga, es necesario disponer de un factor de ajuste que
sea capaz de ajustar la deriva para cada ángulo de tiro. El STANAG 4355 indica que i
debe considerarse la unidad mientras que fL se utilizará para ajustar la deriva, siendo QM
y QD parámetros constantes.
En cuanto al tiempo tras la finalización del quemado del propulsante tB; si K(p)
aumenta, disminuye el tiempo extinción del motor siendo ésta la contribución más
importante. Si f(iBB,MT) aumenta, disminuye tB, pero de manera imperceptible. Si tDI
aumenta, tB crece prácticamente como una traslación y si fL aumenta, tB crece pero sin
percepción aparente.
Así, para cada carga, se aplica el algoritmo de optimación para determinar los factores
de ajuste tDI y K(p) (si se conoce el tiempo de retraso a la ignición del motor base burn
tDI, se fijará este valor). En este punto, los análisis efectuados han mostrado como los
mejores resultados se obtienen definiendo la función objetivo únicamente como función
del tiempo de extinción del motor base burn.
XII.-55
A continuación, para cada carga y ángulo de tiro, se vuelve a aplicar el algoritmo de
optimación para determinar los factores de ajuste f(iBB,MT) y fL definiendo aquí la
función objetivo función del alcance y la deriva únicamente, ya que se ha determinado
que así se obtienen los mejores resultados.
Se va a esquematizar todo el proceso de resolución en los siguientes pasos:
1. Para cada carga, se aplica el algoritmo de optimación para determinar los
factores de ajuste tDI y K(p) (si se conoce el tiempo de retraso a la
ignición del motor base burn tDI, se fijará este valor). Obtenido el tiempo
de extinción del motor base burn de experiencias realizadas, se calculan
los factores de ajuste tDI y K(p) que mejor aproximen el tiempo de
extinción del motor base burn. A través de experiencias realizadas se
obtiene el tiempo de extinción del motor base burn, que se designará
como tBi-exp para diferentes ángulos de tiro, definiendo la función objetivo
como
i=m
E = ∑ t Bi − t Bi −exp
i =1
t Bi −exp = t Bi −exp (MVi )
t Bi −exp = t Bi −exp (MVi , t DI , K ( p ))
siendo los términos tBi los obtenidos como resultado de haber realizado
todo el proceso de cálculo en función de los factores de ajuste tDI y K(p).
En este paso se tomará f(iBB,MT) = 1 y fL = 1 .
2. A continuación, para cada carga y ángulo de tiro, se aplica el algoritmo
de optimación para determinar los factores de ajuste f(iBB,MT) y fL.
Obtenido el alcance y la deriva de experiencias realizadas, se calculan los
XII.-56
factores de ajuste f(iBB,MT) y fL que mejor aproxime el alcance y la
deriva. A través de experiencias realizadas se obtiene el alcance y la
deriva, que se designaran como alcanceexp y derivaexp, para cada ángulo
de tiro, definiendo la función objetivo como
E = walc (alcancei − alcancei −exp ) + wder (derivai − derivai −exp )
2
2
alcancei −exp = alcancei −exp (QEi , MVi )
derivai −exp = derivai −exp (QEi , MVi )
alcancei = alcancei (QEi , MVi , f (iBB , MT ), f L )
derivai = derivai (QEi , MVi , f (iBB , MT ), f L )
siendo los términos alcance y deriva los obtenidos como resultado de
haber realizado todo el proceso de cálculo en función de los factores de
ajuste f(iBB,MT) y fL. Los parámetros walc y wder son factores de peso que
pueden ser diferentes dependiendo del paréntesis al que vayan a afectar y
que permiten favorecer un requisito en perjuicio de los otros. Esto
conlleva a que es necesario seleccionar el peso que afecta a cada uno de
los paréntesis.
Los factores de ajuste tDI y K(p) se han calculado en el apartado anterior
para cada carga.
Obtenido los factores de ajuste f(iBB,MT) y fL para cada ángulo de tiro, se
pueden determinar los siguientes polinomios mediante un ajuste por
mínimos cuadrados
f (iBB , MT ) = iBB( MT =21) + b1 ⋅ (MT − 21) + b2 ⋅ (MT − 21) + b3 ⋅ (MT − 21)
2
iBB( MT = 21) = a0 + a1 ⋅ (QE ) + a2 ⋅ (QE ) + a3 ⋅ (QE )
2
XII.-57
3
3
f L = a0 + a1 ⋅ (QE ) + a2 ⋅ (QE ) + a3 ⋅ (QE )
2
3
Se ha considerado apropiado para este cálculo la siguiente condición de parada: L =
100, K1 = 4, ∈1 = 0.5 , K2 = 4, ∈2 = 0.5 y M = 1000.
Se ha aplicado el anterior procedimiento para localizar los términos SC0, n y 4CxBB de los
proyectiles de artillería OE155F2RTC FR HEA BB1 y OE155BONUS FR CBL/DUP
BB1, y compararlos con los correspondientes coeficientes de reducción de resistencia
base burn CxBB de dichos proyectiles. El proyectil OE155F2RTC FR HEA BB1 se ha
disparado desde un tubo 155AUF1 y el proyectil OE155BONUS FR CBL/DUP BB1
desde un tubo 155AUF1, con tres cargas (la más alta, la más baja y una intermedia) y a
cinco ángulos de tiro diferentes (300, 500, 700, 900 y 1200 milésimas).
XII.-58
El siguiente punto es investigar hasta que punto el hecho de sustituir la curva original
correspondiente al coeficiente de reducción de resistencia base burn CxBB por una curva
parabólica por tramos similar, afectará al alcance y a la deriva. Disparando con todas las
cargas y a cinco ángulos de tiro diferentes (300, 500, 700, 900 y 1200 milésimas), se ha
obtenido una diferencia máxima de unos quince metros al intercambiar el coeficiente de
reducción de resistencia base burn CxBB por la curva parabólica por tramos calculada.
Estos valores suponen un error porcentual de alrededor de un 0.05 %. No obstante, no
debe olvidarse que aún no se ha hecho uso de los factores de ajuste. Una vez ajustados
los factores de ajuste para cada carga y ángulo de tiro se obtienen precisiones del orden
de un metro, aplicando este método.
Se ha aplicado el anterior procedimiento al proyectil de artillería M864 US CBL/DUP
BB2, el cual había sido calculado originalmente por el método 2, y ahora se resolverá
aplicando el método 1. El proyectil M864 US CBL/DUP BB2 se ha disparado desde un
tubo M198 con tres cargas (la más alta, la más baja y una intermedia) y a cinco ángulos
de tiro diferentes (300, 500, 700, 900 y 1200 milésimas).
XII.-59
Inicialmente se define un parámetro de inyección de eficiencia óptima I0, teniendo en
cuenta que al comienzo de la trayectoria el parámetro de inyección de propulsante en el
motor base burn I debe ser mayor que el parámetro de inyección de eficiencia óptima I0,
lo cual ocurre hasta que el propulsante del motor empieza a agotarse. En ese momento,
el parámetro de inyección de propulsante en el motor base burn I se vuelve más
pequeño que el parámetro de inyección de eficiencia óptima I0, y el coeficiente global
de reducción de resistencia base burn cae rápidamente. Este comportamiento debe
ocurrir para todas las cargas y todos los ángulos de tiro, por lo que el resto de
parámetros necesarios para el cálculo deben estimarse de un proyectil base burn
semejante, en esta primera etapa del cálculo. Como proyectil base burn semejante se ha
considerado en esta fase el proyectil OE155F2RTC FR HEA BB1, considerando el área
de combustión del propulsante base burn SC adimensional, n y el coeficiente de
reducción de resistencia base burn CxBB.
XII.-60
A continuación, se aplica el algoritmo de optimación para determinar los términos SC0, n
y 4CxBB (CxBB0, CxBB1, CxBB2, y CxBB3).
XII.-61
semejante seleccionado, podría ocurrir que se produjese este efecto, aunque como se
verá a continuación los resultados han sido plenamente satisfactorios. Si por desgracia
hubiese ocurrido esta circunstancia resultando en una caída abrupta al comienzo de la
trayectoria, sería necesario volver a definir un nuevo parámetro de inyección de
eficiencia óptima I0 y repetir todo el cálculo de nuevo. La habilidad para elegir el
parámetro de inyección de eficiencia óptima I0 es crucial, dado que una mala elección
conlleva un cálculo computacional muy importante.
XII.-65
XII.-66
XII.-67
XII.-68
XII.-69
XII.-70
XII.-71
XII.-72
Se ha aplicado el procedimiento definido anteriormente al proyectil de artillería ER
(Extended Range)-50/BB SP HEA BB1, empleando el método 1. Para aumentar las
prestaciones en el campo de la artillería de 105 mm, EXPAL (Explosivos Alaveses
S.A.), ha desarrollado este nuevo proyectil disparado con una carga L36, obteniendo
alcances del orden de 20.1 kilómetros. La unidad de corrimiento baja es un conjunto
atornillado en la base del proyectil actuando como generador del gas sin empuje. La
ignición es activada por la carga propulsiva en el momento del disparo. El gas generado
llena el volumen normal de la base donde hay turbulencia, aumentando el alcance hasta
un 17%. Las bandas de forzamiento han sido adaptadas para poder disparar el proyectil
desde un obús L118 Light Gun.
Las experiencias fueron realizadas en el Centro de Ensayos Torregorda los días 21 y 22
de mayo de 2002. Se disparó con una carga L36, desde un obús L118 y a cinco ángulos
de tiro diferentes (400, 525, 650, 750 y 850 milésimas).
XII.-73
XII.-75
XII.-76
XII.-77
Inicialmente se define un parámetro de inyección de eficiencia óptima I0, teniendo en
cuenta que al comienzo de la trayectoria el parámetro de inyección de propulsante en el
motor base burn I debe ser mayor que el parámetro de inyección de eficiencia óptima I0,
lo cual ocurre hasta que el propulsante del motor empieza a agotarse. En ese momento,
el parámetro de inyección de propulsante en el motor base burn I se vuelve más
pequeño que el parámetro de inyección de eficiencia óptima I0, y el coeficiente global
de reducción de resistencia base burn cae rápidamente. Este comportamiento debe
ocurrir para todas las cargas y todos los ángulos de tiro, por lo que el resto de
parámetros necesarios para el cálculo deben estimarse de un proyectil base burn
semejante, en esta primera etapa del cálculo. Como proyectil base burn semejante se ha
considerado en esta fase el proyectil OE155F2RTC FR HEA BB1, considerando el área
de combustión del propulsante base burn SC adimensional, n y el coeficiente de
reducción de resistencia base burn CxBB.
XII.-78
A continuación, se aplica el algoritmo de optimación para determinar los términos SC0, n
y 4CxBB (CxBB0, CxBB1, CxBB2, y CxBB3).
XII.-79
QM 1.0
Finalmente se debe comprobar que al comienzo de la trayectoria, el parámetro de
inyección de propulsante en el motor base burn I no se vuelva más pequeño que el
parámetro de inyección de eficiencia óptima I0 para alguna carga o algún ángulo de tiro,
como se explicó en detalle anteriormente. Dado que inicialmente se había definido un
parámetro de inyección de eficiencia óptima I0 basándose en el proyectil base burn
semejante seleccionado, podría ocurrir que apareciese este efecto, aunque como se verá
a continuación los resultados han sido enteramente satisfactorios. Si por desventura
hubiese ocurrido esta circunstancia resultando en una caída abrupta al comienzo de la
trayectoria, sería necesario volver a definir un nuevo parámetro de inyección de
eficiencia óptima I0 y repetir todo el cálculo de nuevo.
XII.-81
XII.-82
XII.-83
XII.-84
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO XIII
MODELIZACIÓN DE PROYECTILES BASE
BURN MÉTODO 2
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
XIII.-1
XIII.-2
XIII.-MODELIZACIÓN
DE
PROYECTILES
BASE
BURN
MÉTODO 2
1. Índice
1. Índice
2. Proyectiles base burn método 2
2.1.
Cambio en la presión de base adimensional para cambios en el
parámetro de inyección de propulsante δBP δI
2.2.
Derivada de referencia de la masa de propulsante del motor m& *f y
tiempo de referencia de apagado del motor t B*
2.3.
Duración del motor base burn tB - tDI, tiempo de referencia de
*
, presión de
retraso a la ignición del motor base burn t DI
referencia del aire atmosférico local Pr y velocidad de rotación
axial de referencia pr
2.4.
Implementación del método de cálculo
XIII.-3
XIII.-4
2. Proyectiles base burn método 2
Se enumeran a continuación los coeficientes base burn para proyectiles base burn
método 2. Estos coeficientes se han separado en dos grupos atendiendo a su dificultad,
los primeros de ellos son los más simples y se reflejan a continuación. Los segundos
merecen un estudio más exhaustivo.
Símbolo
IXB
mDI
mf
tDI
XCG0
XCGB
Texto
TDI
Descripción
Momento de inercia axial al
finalizar el quemado del
propulsante
Masa de retraso a la
ignición.
Masa de propulsante del
motor
Tiempo de retraso a la
ignición del motor base burn
Distancia inicial del centro
de masas a la ojiva
Distancia del centro de
masas a la ojiva, al finalizar
el quemado del propulsante
Texto
Unidad
IXB
kgm2
MDI
kg
MFUEL
kg
TDI
s
XCG0
m
XCGB
m
Dependencia
MT, carga
Nota
Polinomio función de la temperatura de propulsante del motor, para cada
carga
a0 + a1 (MT - 21) + a2 (MT - 21)2 + a3 (MT - 21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en
°C), para una carga dada. Los intervalos de temperatura deben introducirse en
orden ascendente con el formato
TDI MTmin
MTmax
a0
a1
a2
a3
Si no se conocen los momentos de inercia, tanto el momento de inercia axial IX como el
momento de inercia axial al finalizar el quemado del propulsante IXB, pueden estimarse
a partir de proyectiles asistidos semejantes, como ya se estudió en análisis previos.
El tiempo de retraso a la ignición del motor base burn tDI viene dado como una función
de la temperatura de propulsante del motor para cada carga:
XIII.-5
t DI = a0 + a1 ⋅ (MT − 21) + a2 ⋅ (MT − 21) + a3 ⋅ (MT − 21)
2
3
Es un valor pequeño por lo que si no se conociera, lo más simple es considerarlo nulo.
El ajuste del resto de coeficientes absorberá la diferencia mínima que se produzca.
La masa de retraso a la ignición mDI es la masa de las componentes del proyectil que se
han desprendido hasta el tiempo de retraso a la ignición. Su valor es muy pequeño y
puede considerarse nula en primera aproximación. El resto de coeficientes absorberá la
pequeña diferencia que se produzca.
Usualmente, la masa de propulsante del motor mf es dato pero si no lo fuera, podría
estimarse dentro del proceso de optimización con el resto de coeficientes; no obstante,
la masa de propulsante del motor depende del tiempo de extinción del motor base burn.
Este dato resulta fácilmente medible mediante diversos dispositivos empleados en las
experiencias.
La distancia inicial del centro de masas a la ojiva XCG0 y la distancia del centro de masas
a la ojiva al finalizar el quemado del propulsante XCGB, pueden estimarse a partir de
proyectiles asistidos semejantes, como ya se estudió en análisis previos
Los coeficientes base burn que se relatan a continuación son los más complejos de
determinar y ya en si mismos constituyen un estudio de relevancia mayor, por lo que se
examinaran cada uno por separado a fin de efectuar un estudio exhaustivo.
Símbolo
∂BP
∂I
m& *f
Pr
Descripción
Cambio en la presión de base
adimensional para cambios
en el parámetro de inyección
de propulsante
Derivada de referencia de la
masa de propulsante del
motor
Presión de referencia del aire
atmosférico local
XIII.-6
Texto
Unidad
-
Dependencia
Mach,
parámetro de
inyección
MFDOTST
kg/s
pseudotiempo
PRESREF
Pa
DBPDI
Símbolo
pr
t B* , tBST
tB - tDI
*
t DI
, tDIST
Texto
DBPDI
Descripción
Velocidad de rotación axial
de referencia
Tiempo de referencia de
apagado del motor
Duración del motor base
burn
Tiempo de referencia de
retraso a la ignición del
motor base burn
Texto
SPINREF
Unidad
rad/s
TBST
s
TBURN
s
TDIST
s
Dependencia
MT, carga
Nota
Polinomio función del número de Mach
a0 + a1M + a2M2 + a3M3 + a4M4
para diferentes intervalos del número de Mach y para un valor dado (b) del
parámetro de inyección de propulsante en el motor base burn (I). Los
números de Mach deben introducirse en orden ascendente con el formato
MFDOTST
DBPDI Mmin
I
b
Mmax
a0
a1
a2
a3
a4
Esta secuencia puede repetirse para diferentes valores del parámetro de
inyección de propulsante que debe introducirse en orden ascendente.
Polinomio función del pseudotiempo t*
a0 + a1t* + a2t*2
para diferentes intervalos de t*. Los intervalos deben introducirse en orden
ascendente con el formato
TBURN
MFDOTST t*min
t*max a0 a1 a2
Polinomio función de la temperatura de propulsante del motor, para cada
carga
a0 + a1 (MT - 21) + a2 (MT - 21)2 + a3 (MT - 21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en
°C), para una carga dada. Los intervalos de temperatura deben introducirse en
orden ascendente con el formato
TBURN MTmin
MTmax
a0
a1
a2
a3
Para establecer correspondencia entre los resultados obtenidos computacionalmente y
las experiencias observadas, se aplican los factores de ajuste.
XIII.-7
Símbolo
fBTP
fBTp
f(iΒΒ,MT)
Texto
Descripción
Factor del tiempo de
quemado de la presión del
aire atmosférico
Factor del tiempo de
quemado de la velocidad de
rotación axial
Factor base burn
Texto
FBTPRES
Dependencia
carga
FBTSPIN
-
carga
FIBB
-
MT, QE, carga
FBTPRES
Nota
Es una constante para cada carga, con el formato
FBTSPIN
FBTPRES
a
Es una constante para cada carga, con el formato
FIBB
Unidad
-
FBTSPIN
a
Polinomio función de la temperatura de propulsante del motor y del ángulo
de tiro, para cada carga
a0 + a1QE + a2QE2 + a3QE3 + b1(MT-21) + b2(MT-21)2 + b3(MT-21)3
para diferentes intervalos de MT (temperatura de propulsante del motor en
°C) y QE (ángulo de tiro en milésimas), para una carga dada. Los intervalos
de temperatura deben introducirse en orden ascendente con el formato
FIBB MTmin
MTmax a0
a1
a2
a3
b1
Parámetro
Símbolo
Factor del tiempo de quemado de la velocidad
fBTp
de rotación axial del proyectil base burn
Factor del tiempo de quemado de la presión del
fBTP
aire atmosférico local del proyectil base burn
Factor base burn
f(iBB,MT)
b2
b3
Unidad
Límites típicos
-
− 0.5 < f BTp < −0.1
-
− 0.9 < f BTP < −0.5
-
0.9<f(iBB,MT)<1.1
2.1. Cambio en la presión de base adimensional para cambios en el parámetro de
inyección de propulsante δBP δI
r
La reducción de resistencia de base, debida al motor base burn D , durante la fase de
quemado ( t DI ≤ t ≤ t B , siendo tDI el tiempo de retraso a la ignición del motor base burn y
tB el tiempo de apagado del motor), se adiciona a la ecuación del movimiento del centro
XIII.-8
r
r
de masas del proyectil F = mu&& (obsérvese que se ha incluido la aceleración debida a la
fuerza de resistencia):
⎛
⎡
⎤
⎜
⎛ δBP ⎞
⎢
⎥
I⎜
⎟
r
⎛ π ⋅ ρ ⋅ i ⋅ d 2 ⎞⎜
δI ⎠
⎢
⎥
⎝
⎟⎟⎜ C D0 − f (iBB , MT )⎢
+ C D 2 QD ⋅ α e2
D = −⎜⎜
2⎥
α
8m
⎝
⎠⎜
⎢ ⎛⎜ γ ⎞⎟ ⋅ M 2 ⋅ ⎛⎜ d ⎞⎟ ⎥
⎜
⎜d ⎟ ⎥
⎢⎣ ⎝ 2 ⎠
⎝ b⎠ ⎦
⎝
(
⎞
⎟
⎟ r
⎟vv
⎟
⎟
⎠
)
δBP δI viene dada para diferentes valores de I, como una función del número de Mach
en la forma de polinomios de cuarto grado o inferior. Se definen sobre regiones de
números de Mach, desde M MAX i−1 hasta M MAX i inclusive.
⎛ δBP ⎞
2
3
4
⎜
⎟ = a0 + a1 ⋅ M + a2 ⋅ M + a3 ⋅ M + a4 ⋅ M
⎝ δI ⎠ I
Si no se conociera δBP δI , podría estimarse de proyectiles base burn semejantes. Dado
que el objetivo prioritario es encontrar los parámetros que mejor ajusten alcance y
deriva dentro de un proceso de optimización, cabe preguntarse hasta que punto el hecho
de sustituir virtualmente la derivada δBP δI por otra de un proyectil base burn
semejante afectará al alcance y a la deriva.
El término anterior δBP δI constituye el cambio en la presión de base adimensional
para cambios en el parámetro de inyección del propulsante. Esta derivada es
adimensional tanto en el numerador como en el denominador. Analizando el término
δBP δI para proyectiles base burn semejantes: M864 US CBL/DUP BB2, DM662 NO
CBL BB2 y XM982 US HEA BB2 (este es un proyectil guiado con canard desplegables
que originalmente fue calculado aplicando el Modelo de Masa Puntual, debido a las
dificultades que aparecieron al aplicar el Modelo Modificado de Masa Puntual), se tiene
que δBP δI es el mismo para todos ellos.
XIII.-9
XIII.-10
XIII.-11
2.2. Derivada de referencia de la masa de propulsante del motor m& *f y tiempo de
referencia de apagado del motor t B*
Para t DI ≤ t < t B (siendo tDI el tiempo de retraso a la ignición del motor base burn y tB el
tiempo de apagado del motor)
m& = − m& f
⎛ t B* − t (*t ) ⎞ *
⎟ ⋅ m&
m& f = ⎜
⎜ tB − t ⎟ f
⎝ (t )
⎠
siendo m& f la derivada de la masa de propulsante del motor, t B* el tiempo de referencia
de apagado del motor, t(*t ) el pseudotiempo de quemado del motor y m& *f la derivada de
referencia de la masa de propulsante del motor como función del pseudotiempo de
quemado del motor t*. Esta última viene dada como
XIII.-12
m& *f = a0 + a1 ⋅ ti* + a2 ⋅ t i*2 ; para t i* < t * ≤ t i*+1
siendo a0, a1 y a2 definidas sobre regiones de t*, desde t i*=0 hasta t i*=n inclusive.
Si no se conoce la derivada de referencia de la masa de propulsante del motor m& *f ,
puede estimarse de proyectiles base burn semejantes. Debe tenerse en cuenta que se van
a localizar los parámetros que mejor ajusten alcance y deriva dentro de un proceso de
optimización. Tras esto, debe examinarse como afectará al alcance y a la deriva la
sustitución de la derivada de referencia de la masa de propulsante del motor m& *f por
otra de un proyectil base burn semejante. La masa de propulsante del proyectil mf varía
de unos proyectiles a otros y obviamente su derivada también, por lo que para poder
efectuar la sustitución virtual enunciada anteriormente, es necesario pasar a variables
adimensionales.
La derivada de referencia de la masa de propulsante del motor m& *f es una función del
pseudotiempo de quemado del motor t*. Todos los proyectiles base burn semejantes
presentan la particularidad de que m& *f es nula para t * ≥ t B* siendo t B* el tiempo de
referencia de apagado del motor. A fin de efectuar una comparativa de proyectiles base
burn semejantes se va a aplicar la teoría de análisis dimensional a la ecuación
m& *f = m& *f (t * ), adimensionalizando el pseudotiempo de quemado del motor t* con el
tiempo de referencia de apagado del motor t B* . Aplicando el teorema π de Vaschy y
Buckingham, se va a adimensionalizar la derivada de referencia de la masa de
propulsante del motor m& *f con un valor m& *f ref a determinar.
(
)
(
t*
m& = a0 + a1 ⋅ t * + a2 ⋅ t B*2
tB
*
f
⎛ a
m& *f
⎜ 0
=
*
&
m f ref ⎜⎝ m& *f ref
*
B
⎛ t* ⎞
⎜⎜ * ⎟⎟
⎝ tB ⎠
)
2
⎞ ⎛ a * ⎞ t * ⎛ a *2 ⎞⎛ t * ⎞ 2
⎟ + ⎜ 1 t ⎟ + ⎜ 2 t ⎟⎜ ⎟
⎟ ⎜ m& *f B ⎟ t B* ⎜ m& *f B ⎟⎜⎝ t B* ⎟⎠
⎠
⎝ ref
⎠ ⎝ ref ⎠
XIII.-13
Reescribiendo la ecuación anterior en términos de magnitudes adimensionales:
a
t*
a
a
m& *f = m& *f ⋅ m& *f ref ; a0 = *0 ; a1 = *1 t B* ; a2 = *2 t B*2 ; t * = *
m& f ref
tB
m& f ref
m& f ref
( )
m& *f t * = a0 + a1 ⋅ t * + a2 ⋅ t *2
Considerando m& *f ref = 1.0 y aplicando la anterior ecuación a los proyectiles base burn
semejantes: M864 US CBL/DUP BB2, DM662 NO CBL BB2 y XM982 US HEA BB2,
se tiene que m& *f = m& *f (t * ) es la misma para todos ellos.
A fin de flexibilizar el método, se plantea introducir un nuevo coeficiente que deberá ser
ajustado:
XIII.-14
⎧⎛
m& *f
* ⎪⎜ a0
&
=
m
⎨⎜ *
f
0
m& *f ref
⎪⎩⎝ m& f ref
⎞ ⎛ a * ⎞ t * ⎛ a *2 ⎞⎛ t * ⎞ 2 ⎫⎪
⎟ + ⎜ 1 t ⎟ + ⎜ 2 t ⎟⎜ ⎟ ⎬
⎟ ⎜ m& *f B ⎟ t B* ⎜ m& *f B ⎟⎜⎝ t B* ⎟⎠ ⎪
⎠ ⎝ ref ⎠
⎝ ref
⎠
⎭
{
m& *f = m& *f 0 a0 + a1 ⋅ t * + a2 ⋅ t *2
}
Así, se tiene que los parámetros a ser ajustados en el proceso de optimización posterior,
que aporta este apartado, son m& *f0 y el tiempo de referencia de apagado del motor t B* .
Obsérvese que también podría haberse aplicado un coeficiente a ser ajustado que
multiplicase al parámetro δBP δI pero esa misión ya la cumple el factor base burn
f(iΒΒ,MT).
2.3. Duración del motor base burn tB - tDI, tiempo de referencia de retraso a la
*
ignición del motor base burn t DI
, presión de referencia del aire atmosférico
local Pr y velocidad de rotación axial de referencia pr
Para t DI ≤ t < t B (siendo tDI el tiempo de retraso a la ignición del motor base burn y tB el
tiempo de apagado del motor)
t&(*t ) =
(
t B* − t(*t )
t B(t ) − t
)
⎡
⎛ P& ⎞⎤
⎛ p& ⎞
t&B(t ) = t B(t ) − t ⎢ f BTp ⎜⎜ ⎟⎟ + f BTP ⎜⎜ ⎟⎟⎥
⎝ p⎠
⎝ P ⎠⎦
⎣
siendo t(*t ) el pseudotiempo de quemado del motor , P la presión del aire atmosférico
local, p la velocidad de rotación axial del proyectil, fBTp el factor del tiempo de quemado
de la velocidad de rotación axial del proyectil base burn y fBTP el factor del tiempo de
quemado de la presión del aire atmosférico local del proyectil base burn. Estos dos
últimos factores vienen dados como constantes para cada carga.
XIII.-15
La condición inicial en tDI es
*
t(*t DI ) = t DI
t B(t
DI
)
= t DI
f BTp
f BT
⎡
⎛ p(tDI ) ⎞ ⎛ P(tDI ) ⎞ P ⎤
⎟⎟ ⎜⎜
⎟⎟ ⎥
+ ⎢(t B − t DI )⎜⎜
⎢⎣
⎝ pr ⎠ ⎝ Pr ⎠ ⎥⎦
*
el tiempo de referencia de retraso a la
siendo tB - tDI la duración del motor base burn, t DI
ignición del motor, Pr la presión de referencia del aire atmosférico local y pr la
velocidad de rotación axial del proyectil de referencia.
La duración del motor base burn tB - tDI, también conocida como TBURN, constituye un
parámetro a ser ajustado en el proceso de optimización posterior; no obstante,
analizando la expresión que proporciona la condición inicial en tDI para la ecuación del
tiempo de apagado del motor tB, puede observarse como los términos en potencia
constituyen un factor de escala para tB - tDI:
( p(
t DI )
pr
) (P(
f BTp
t DI )
Pr
)
f BTP
Si se selecciona la presión de referencia del aire atmosférico local Pr así como la
velocidad de rotación axial del proyectil de referencia pr, como valores muy próximos a
P(tDI ) y a p(t DI ) , respectivamente
pr ≈ p(t DI ) (1+ ∈)
Pr ≈ P(t DI ) (1+ ∈)
siendo ∈ un valor muy pequeño
t B(t
DI
)
[
(
)]
≈ t DI + (t B − t DI ) (1 − f BTp ∈) 1 − f BTP ∈
XIII.-16
t B(t
DI
)
[
(
≈ t DI + (t B − t DI ) 1− ∈ f BTp + f BTP
)]
con lo que finalmente se tiene
t B(t
DI
)
(
≈ t DI + (t B − t DI )− ∈ (t B − t DI ) f BTp + f BTP
)
No obstante, la presión de referencia del aire atmosférico local Pr y la velocidad de
rotación axial del proyectil de referencia pr son valores únicos en el problema, pero
P(tDI ) y p(tDI ) dependen del disparo concreto de que se trate (ángulo de tiro, carga y
tiempo de retraso a la ignición del motor base burn) por lo que será necesario considerar
el valor más apropiado que cumpla las condiciones anteriores.
Considerando la ecuación diferencial que describe el tiempo de apagado del motor t B(t )
(
)
⎡
⎛ P& ⎞⎤
⎛ p& ⎞
t&B(t ) = t B(t ) − t ⎢ f BTp ⎜⎜ ⎟⎟ + f BTP ⎜⎜ ⎟⎟⎥
⎝ p⎠
⎝ P ⎠⎦
⎣
Recordando
4
p& π ⋅ ρ ⋅ d ⋅ v ⋅ C spin
=
p
8I x
P
ΔP ΔP
P& =
u2 = − K u2
=
Δt ΔE2
T
La velocidad de rotación axial del proyectil p es positiva y decreciente, con lo que su
derivada p& es negativa en todo el dominio de existencia de la función. Análogamente,
la derivada respecto al tiempo de la presión P& es negativa hasta que el proyectil alcanza
la ordenada máxima en la rama ascendente de la trayectoria.
A partir de los proyectiles base burn semejantes, es posible asignar valores típicos al
factor del tiempo de quemado de la velocidad de rotación axial del proyectil base burn
XIII.-17
fBTp y al factor del tiempo de quemado de la presión del aire atmosférico local del
[
]
proyectil base burn fBTP. De este modo, el término f BTp ( p& p ) + f BTP (P& P ) es positivo
en la rama ascendente de la trayectoria, y como t < t B(t ) , t&B(t ) es positiva en esta rama y
t B(t ) es creciente. Una vez que se ha sobrepasado la ordenada máxima y el proyectil
comienza a descender, P& es positiva con lo que f BTp ( p& p ) continua siendo positivo,
pero
f BTP (P& P ) cambia de signo y puede ocurrir que t&B(t ) se vuelva negativa
dependiendo del valor numérico de cada término. Cuando t = t B(t ) se produce el apagado
del motor definiendo el tiempo de extinción del motor base burn tBOFF siendo
t B(t
DI
)
≤ t B(t ) ≤ t BOFF . Si el motor base burn se apaga antes de alcanzar la ordenada
máxima, t&B(t ) es positiva en todo el dominio.
Considerando la ecuación diferencial que describe el pseudotiempo de quemado del
motor t(*t )
t&(*t ) =
t B* − t(*t )
t B(t ) − t
Dado que m& *f es nula para t * ≥ t B* , debido a que se ha consumido el propulsante ( t * = t B*
define el pseudotiempo de extinción del motor base burn), y dada la ecuación que
refiere la derivada de la masa de propulsante del motor m& f como función de la derivada
de referencia de la masa de propulsante del motor m& *f
⎛ t B* − t (*t ) ⎞ *
⎟ ⋅ m& = t&* ⋅ m& *
&
mf = ⎜
(t )
f
⎜ tB − t ⎟ f
⎠
⎝ (t )
puede afirmarse que la función pseudotiempo de quemado del motor t* solo tiene
*
sentido para t DI
≤ t * ≤ t B* . Y como t < t B , t&(*t ) es positiva en todo el dominio de
existencia de la función, con lo que t (*t ) es creciente.
XIII.-18
Integrando la ecuación diferencial que describe el pseudotiempo de quemado del motor
t(*t )
dt(*t )
dt
=
*
*
t B − t( t ) t B( t ) − t
*
e imponiendo la condición inicial t(*t DI ) = t DI
⎛ t B* − t(*t ) ⎞
t
dτ
ln⎜⎜ * * ⎟⎟ = − ∫
t
DI t
B( t ) − τ
⎝ t B − t DI ⎠
t B* − t(*t )
*
t B* − t DI
=e
− ∫tt
DI
dτ
t B( t ) −τ
Si se considera que el tiempo de apagado del motor t B(t ) es una función muy suave del
tiempo
t B* − t(*t )
t −t
*
B
*
DI
=
tB − t
t B − t DI
rearreglando, se tiene
*
+
t * = t DI
*
t B* − t DI
(t − tDI )
t B − t DI
Esta expresión podría haberse obtenido integrando aproximadamente la ecuación
original para tiempos muy cercanos a tDI .
*
) (t B − t DI ) . Si se
Un factor muy importante en este análisis es el término λ = (t B* − t DI
dan valores típicos a cada uno de los parámetros que componen λ, utilizando para ello
los proyectiles base burn semejantes, puede comprobarse como λ ≈ 1+ ∈ siendo ∈ un
valor muy pequeño.
XIII.-19
*
El tiempo de referencia de retraso a la ignición del motor t DI
constituye la condición
inicial para integrar la ecuación diferencial que determina el pseudotiempo de quemado
del motor t(*t ) . Como la duración del motor base burn tB - tDI (TBURN) constituye un
parámetro a ser ajustado en el proceso de optimización posterior, puede escribirse
*
t DI
= t B* − (t B − t DI ) ⋅ λ
*
t DI
≈ t B* − (t B − t DI )− ∈ (t B − t DI )
El tiempo de retraso a la ignición del motor base burn tDI es una función que depende de
la temperatura de propulsante del motor MT para cada carga, mientras que el tiempo de
*
es una constante. No obstante, para los
referencia de retraso a la ignición del motor t DI
*
≈ t DI , dado que la dependencia de
proyectiles base burn semejantes suele ocurrir que t DI
tDI con MT suele ser pequeña y asumirse el mismo valor de tDI para todas las cargas.
*
Así, puede estimarse t DI
a partir de un valor promedio de todos los tDI´s
correspondientes a todas las cargas.
Como cuando t = tB y t * = t B* se produce el apagado del motor base burn, la derivada del
pseudotiempo de quemado del motor t&(*t ) presenta una indeterminación cero partido por
cero. El cálculo del límite requiere el conocimiento de las funciones que describen el
tiempo de apagado del motor t B(t ) y del pseudotiempo de quemado del motor t(*t ) . No
obstante, si se considera que el tiempo de apagado del motor t B(t ) es una función muy
suave del tiempo
t&(*t ) =
t B* − t (*t )
t B(t ) − t
→
*
t B* − t DI
=λ
t B − t DI
Analizando un ejemplo típico de un proyectil base turn y obteniendo gráficas del tiempo
de apagado del motor t B(t ) , del pseudotiempo de quemado del motor t(*t ) , y sus
XIII.-20
correspondientes derivadas t&B(t ) y t&(*t ) , así como de la derivada de la masa de propulsante
del motor m& f .
XIII.-21
Aunque todo el sistema de ecuaciones diferenciales se encuentra acoplado, del análisis
previo puede determinarse que el tiempo de apagado del motor t B(t ) presenta una fuerte
dependencia con la duración del motor base burn tB - tDI mientras que el pseudotiempo
de quemado del motor t(*t ) depende fuertemente del tiempo de referencia de apagado del
motor t B* .
Si t B* aumenta, m& f = t&(*t ) ⋅ m& *f aumenta, y el propulsante se consume más rápidamente
con lo que al continuar integrando las ecuaciones se llega a un tiempo t = t B(t ) en el que
se ha consumido una masa de propulsante superior a mf, lo cual no es posible.
Análogamente, si t B* disminuye, m& f disminuye, y el propulsante se consume más
lentamente con lo que al continuar integrando las ecuaciones se llega a un tiempo t = tB
en el que se ha consumido una masa de propulsante inferior a mf. Así, como ya se ha
comentado anteriormente m& f depende fuertemente del tiempo de referencia de apagado
del motor t B* mientras que el tiempo de apagado del motor t B(t ) depende fuertemente de
la duración del motor base burn tB - tDI.
El acoplamiento entre t B* y tB - tDI conviene de que dado un valor determinado de t B* , se
integra m& = −m& f = −t&(*t ) ⋅ m& *f , función de este tiempo de referencia de apagado del
motor, y cuando se alcanza el tiempo t = t B(t ) se obtiene de la primera ecuación un valor
que se va a definir como mBOFF, que debe cumplir la primera condición
mBOFF = mB = m0 − mDI − m f . Obsérvese que t = t B(t ) proviene de la integración de la
ecuación diferencial que describe el tiempo de apagado del motor t B(t ) que depende de la
duración del motor base burn tB - tDI. Análogamente, el tiempo de extinción del motor
base burn tBOFF debe coincidir con el tiempo de extinción del motor base burn medido
en las experiencias (segunda condición). Estas dos condiciones deben tenerse en cuenta
a la hora de seleccionar apropiadamente la función objetivo en el proceso de
optimización.
XIII.-22
2.4. Implementación del método de cálculo
A continuación se va ha habilitar un método original de cálculo que constituye una de
las aportaciones de esta tesis, con el objeto de determinar los diferentes parámetros
necesarios para caracterizar apropiadamente el vuelo de un proyectil base burn
empleando el método 2.
Aunque el algoritmo de recocido simulado (SA) resulta mejor que al algoritmo genético
(GA) en cuanto a la precisión de los resultados obtenidos, presenta el inconveniente de
que requiere una labor de determinación (y por tanto de prueba y error) muy exhaustiva
de los parámetros. Esto implica un mayor tiempo de cálculo al tener que realizar ajustes
constantes para obtener buenos resultados. Este inconveniente no lo presenta el
algoritmo genético que aunque es menos preciso, es más robusto en este sentido, lo cual
condiciona la aplicación de ambos algoritmos. El algoritmo genético es más apropiado
para una fase incipiente del problema, cuando se tiene un mayor desconocimiento de los
resultados a obtener. Entonces, las soluciones obtenidas utilizando el algoritmo genético
se utilizan como valor de entrada para la aplicación del algoritmo de recocido simulado.
La sinergia de ambos algoritmos produce los efectos más potentes en la determinación y
resolución del problema.
El proceso de determinación de los diferentes parámetros que modelan el proceso de
quemado del propulsante así como de la reducción de la resistencia al aumentar la
presión en la base, constituye un procedimiento multipaso e iterativo donde
determinados unos parámetros (A), se debe acometer el cálculo de los siguientes (B),
con el consiguiente problema de que cuando se comienza el cálculo a la búsqueda de los
parámetros A es necesario presuponer los parámetros B, los cuales obviamente no se
disponen. He aquí donde es necesario acudir en ayuda de los proyectiles base burn
semejantes para estimar estos parámetros B previos. Cuanto más semejante sean estos
proyectiles, menor será el número de iteraciones a realizar. Este proceso debe repetirse
hasta alcanzar la precisión deseada.
Si no fuera dato la masa de propulsante del motor mf, podría estimarse dentro del
proceso de optimización con el resto de coeficientes; no obstante, la masa de
propulsante del motor depende del tiempo de extinción del motor base burn; es decir, de
XIII.-23
la duración de la fase asistida, hecho que está íntimamente relacionado con la velocidad
a la que se consume el propulsante del motor. El tiempo de extinción del motor base
burn se obtiene integrando la ecuación diferencial que describe el tiempo de apagado
del motor t B(t ) , e imponiendo la condición t = t B(t ) , que depende fuertemente de la
duración del motor base burn tB - tDI. El tiempo de extinción del motor base burn tBOFF,
obtenido integrando la ecuación diferencial, debe coincidir con el tiempo de extinción
del motor base burn medido en las experiencias. Paralelamente, integrando la ecuación
diferencial que define la masa del proyectil m& = −m& f = −t&(*t ) ⋅ m& *f a través de la ecuación
que describe el pseudotiempo de quemado del motor, que a su vez depende fuertemente
del tiempo de referencia de apagado del motor t B* ; se obtiene un valor de la masa del
proyectil en el momento de extinción del motor base burn, que se ha denominado
mBOFF. Este valor debe coincidir con la masa del proyectil al finalizar el quemado del
propulsante mBOFF = mB = m0 − mDI − m f .
Para cada carga; el tiempo de retraso a la ignición del motor base burn tDI así como la
duración del motor base burn tB - tDI vienen dadas como funciones de la temperatura de
propulsante del motor.
t DI = a0 + a1 ⋅ (MT − 21) + a2 ⋅ (MT − 21) + a3 ⋅ (MT − 21)
2
3
(t B − t DI ) = a0 + a1 ⋅ (MT − 21) + a2 ⋅ (MT − 21)2 + a3 ⋅ (MT − 21)3
El resto de términos; el tiempo de referencia de apagado del motor t B* , el tiempo de
*
y el parámetro m& *f0 son
referencia de retraso a la ignición del motor base burn t DI
constantes.
Se va a esquematizar todo el proceso de resolución en los siguientes pasos, suponiendo
que la masa de propulsante del motor mf es dato:
1. Inicialmente, considerando los proyectiles base burn semejantes, se
introduce el cambio en la presión de base adimensional para cambios en
XIII.-24
el parámetro de inyección de propulsante δBP δI y la derivada de
referencia de la masa de propulsante del motor m& *f adimensional. La
presión de referencia del aire atmosférico local Pr y la velocidad de
rotación axial de referencia pr se calculan aplicando las relaciones
obtenidas anteriormente. El resto de parámetros se pueden estimar de un
proyectil base burn semejante en la primera etapa del cálculo, si no se
disponen de otros datos.
2. Aplicar el algoritmo de optimación para determinar el tiempo de
referencia de apagado del motor t B* , el tiempo de referencia de retraso a
*
y el parámetro m& *f0 . Obtenido el
la ignición del motor base burn t DI
alcance, la deriva y el tiempo de extinción del motor base burn de
*
y m& *f0 que
experiencias realizadas, se calculan los parámetros t B* , t DI
mejor aproximen el alcance, la deriva y el tiempo de extinción del motor
base burn.
Se integra m& = −m& f = −t&(*t ) ⋅ m& *f , función del tiempo de referencia de
apagado del motor t B* , y cuando se alcanza el tiempo t = t B(t ) se obtiene
un valor para la masa que se va a definir como mBOFF, que debe cumplir
mBOFF = mB.
A través de experiencias realizadas se obtiene el alcance, la deriva y el
tiempo de extinción del motor base burn, que se designaran como
alcancei-exp, derivai-exp y tBi-exp para diferentes ángulos de tiro y cargas,
definiendo la función objetivo como
i =m
(
E = ∑ walc (alcancei − alcancei −exp ) + wder (derivai − derivai −exp ) + wt B t Bi − t Bi −exp
2
2
i =1
alcancei −exp = alcancei −exp (QEi , MVi )
derivai −exp = derivai −exp (QEi , MVi )
XIII.-25
) +w
2
mB
(mBOFF − mB )2
t Bi−exp = t Bi−exp (QEi , MVi )
[
(
]
)
*
alcancei = alcancei QEi , MVi , t B* , t DI
, m& *f 0 , {t DI , t B − t DI }
[
(
]
)
*
derivai = derivai QEi , MVi , t B* , t DI
, m& *f 0 , {t DI , t B − t DI }
[
(
]
)
*
t Bi = t Bi QEi , MVi , t B* , t DI
, m& *f 0 , {t DI , t B − t DI }
siendo los términos alcancei, derivai y tBi los obtenidos como resultado
de haber realizado todo el proceso de cálculo en función de los
*
y m& *f0 (no considerar en esta fase en la función de
parámetros t B* , t DI
optimación los términos { }). Los parámetros walc, wder, wtB y wmB son
factores de peso que pueden ser diferentes dependiendo del paréntesis al
que vayan a afectar y que permiten favorecer un requisito en perjuicio de
los otros. Esto conlleva a que es necesario seleccionar el peso que afecta
a cada uno de los paréntesis.
El tiempo de retraso a la ignición del motor base burn tDI así como la
duración del motor base burn tB - tDI pueden estimarse de un proyectil
base burn semejante en la primera etapa del cálculo, si no se disponen de
otros datos.
Si se conoce el tiempo de referencia de retraso a la ignición del motor
*
o se considera asumir su estimación, se fijará este valor.
base burn t DI
A continuación, para cada carga, se aplica el mismo procedimiento
expuesto en el punto anterior pero esta vez para determinar el tiempo de
retraso a la ignición del motor base burn tDI (si se conoce el tiempo de
retraso a la ignición del motor base burn tDI, se fijará este valor) y la
*
y m& *f0 los calculados
duración del motor base burn tB - tDI siendo t B* , t DI
en el punto anterior (no considerar en esta fase en la función de
optimación los términos [ ]).
No obstante, si con el conocimiento disponible del problema puede
XIII.-26
admitirse que los parámetros tDI y tB - tDI toman el mismo valor para cada
carga, algo que sucede con frecuencia, este paso del proceso puede
suprimirse y el paso anterior se consideraría de la misma forma, pero
*
y m& *f0 , los propios tDI y tB - tDI.
incorporando a los términos t B* , t DI
3. Volver al paso 1. y finalizar el proceso cuando se haya alcanzado la
precisión requerida.
Debe tenerse en cuenta que el tiempo de retraso a la ignición del motor base burn tDI es
un valor fácilmente medible en experiencias.
La función objetivo se calcula como un sumatorio que depende de las triadas de valores
alcancei-exp, derivai-exp y tBi-exp, función a su vez del ángulo de tiro y la carga, siendo m el
número total de triadas. Aunque puede preverse a simple vista que cuantos más valores
se dispongan de las experiencias realizadas, mejor será el procedimiento de ajuste,
también se debe tener en cuenta que mayor será el tiempo de cálculo.
Ya se comentó anteriormente que la inclusión de la ordenada máxima en la función
objetivo introduce un empeoramiento en los coeficientes ajustados de esta forma. Si con
estos segundos coeficientes se calcula alcance y deriva, estos resultados son inferiores a
los obtenidos empleando coeficientes ajustados prescindiendo de la ordenada máxima
en la función objetivo. La razón es que la ordenada máxima es un parámetro que ante
variaciones en los coeficientes, experimenta variaciones mucho mayores que las
advertidas para alcance y deriva. Otro factor es que el Modelo Modificado de Masa
Puntual presenta dificultades para determinar la ordenada máxima, una vez ajustada la
deriva y el alcance, con datos obtenidos de experiencias reales.
Si no fuera dato la masa de propulsante del motor mf, el problema se abordaría
*
, m& *f0 , tDI y tB - tDI el propio mf y realizando todo el
incorporando a los términos t B* , t DI
proceso de la misma forma.
La experiencia adquirida en la realización de este trabajo advierte que el número de
parámetros a ajustar de los que depende la función objetivo resulta ligeramente alto (6-
XIII.-27
7). En la medida que se incrementan el número de parámetros de los que depende la
función a optimizar, el entorno de búsqueda se vuelve más complejo con múltiples
óptimos cercanos. Esto establece la necesidad de utilizar nuevos algoritmos ante la casi
imposibilidad de aplicar métodos clásicos tipo analíticos. En este sentido, aunque las
herramientas heurísticas tienen una gran potencia es necesario establecer normas de
apoyo en la resolución. Se debe limitar cuidadosamente el campo de actuación de cada
uno de los coeficientes de los que depende la función objetivo así como las condiciones
iniciales de iteración, para lo cual es necesario disponer de una amplia experiencia, por
lo que es tan importante disponer de una panoplia de proyectiles base burn semejantes
convenientemente bien caracterizados. Una vez abordado el problema y en un estadio
incipiente de resolución, es más conveniente atacar su resolución empleando el
algoritmo genético que aunque no es tan preciso como el algoritmo de recocido
simulado requiere una menor carga de trabajo. Es entonces cuando la solución obtenida
empleando el algoritmo genético se utiliza como valor de entrada en el algoritmo de
recocido simulado, con el objetivo de obtener una mayor precisión en la resolución del
problema, ya que aunque este algoritmo es más preciso requiere una mayor labor de
determinación (y por tanto de prueba y error) de determinados parámetros, lo que
implica mayor tiempo de cálculo al tener que realizar ajustes constantes para obtener
buenos resultados.
Esta fase es previa a la determinación de los factores de ajuste pero es necesario
introducir valores para proceder al cálculo por lo que para el factor base burn y el factor
de sustentación se tomará f(iBB,MT) = 1 y fL = 1 . El factor del tiempo de quemado de la
velocidad de rotación axial del proyectil base burn fBTp y el factor del tiempo de
quemado de la presión del aire atmosférico local del proyectil base burn fBTP toman
valores atípicos, por lo que será necesario asignar estos valores recurriendo para ello a
los proyectiles base burn semejantes.
Como ya se comentó anteriormente, el algoritmo de integración utilizado ha sido el
Runge Kutta 45. No obstante, la especial complejidad de este problema, muy superior al
método 1, debido a que incorpora dos ecuaciones diferenciales adicionales y que estas
son más complicadas, provoca que para obtener una precisión inferior a un metro en el
cálculo de la deriva y el alcance como ya se obtuvo cuando se modeló el problema
XIII.-28
empleando el método 1, es necesario aplicar los siguientes parámetros hmin = 0.01 s, hmax
= 6.0 s y eRK = 0.001 . Pero, con estos valores se computa una trayectoria balística en 45
segundos frente a 1.4 segundos que se obtuvo utilizando el método 1 (estos tiempos son
meramente estimativos a efectos de comparación dado que el tiempo de computación de
una trayectoria individual incluye el tiempo de acceso a ficheros que en un cálculo
masivo de trayectorias no se produciría) por lo que al aplicar los algoritmos de
optimación desarrollados, se obtendrían tiempos de cálculo absolutamente prohibitivos
con lo que el único recurso es disminuir la precisión exigida. Así, teniendo en cuenta los
requisitos de precisión necesarios por la Artillería y las limitaciones del método
empleado, se va a disminuir la precisión en el cálculo de la deriva y el alcance a un
orden de magnitud de diez metros, asignando los siguientes parámetros hmin = 0.04 s,
hmax = 6.0 s y eRK = 0.03 , computando una trayectoria en 4.3 segundos.
Se ha considerado apropiado para este cálculo la siguiente condición de parada: L =
100, K1 = 5, ∈1 = 0.5 , K2 = 5, ∈2 = 0.5 y M = 2500.
Una vez configurados adecuadamente los coeficientes base burn, se deben determinar a
efectos de ajustes finales los factores de ajuste, para la correcta modelización numérica
según el Modelo Modificado de Masa Puntual para proyectiles base burn método 2.
Aplicando el algoritmo de optimación, se deben determinar los factores de ajuste fBTp,
fBTP, f(iBB,MT) y fL utilizando para ello datos de experiencias.
En este trabajo no se ha tenido en cuenta la dependencia con la temperatura de
propulsante del motor MT, utilizando como valor de referencia MT = 21 . La obtención
de valores de temperatura de propulsante del motor extraídos de experiencias es una
labor ardua, dado que estos valores están sujetos a las condiciones climatológicas del
momento, y es necesario disponer de un amplio abanico de valores, por lo que no ha
sido objeto de este trabajo, pudiendo estimarse de proyectiles base burn semejantes,
aunque si se dispara a temperaturas de propulsante del motor cercanas a 21 º C, el efecto
es nulo.
Para cada carga; únicamente el factor base burn f(iBB,MT) y el factor de sustentación fL
son funciones del ángulo de tiro, siendo el factor del tiempo de quemado de la velocidad
XIII.-29
de rotación axial del proyectil base burn fBTp y el factor del tiempo de quemado de la
presión del aire atmosférico local del proyectil base burn fBTP constantes.
El alcance disminuye al disminuir f(iBB,MT), fBTP o/y fBTp. La principal contribución es la
correspondiente al primer término, siendo el peso del término debido a la presión
superior al de rotación. La deriva es muy poco sensible a estos tres parámetros siendo el
comportamiento el de reducirse al disminuir cualquiera de los tres parámetros; no
obstante, numéricamente todos los parámetros se encuentran acoplados.
El STANAG 4355 indica que i debe considerarse la unidad mientras que fL se utilizará
para ajustar la deriva, siendo QM y QD parámetros constantes.
En cuanto al tiempo de extinción del motor base burn tBOFF; si f(iBB,MT) aumenta, tBOFF
aumenta pero de manera imperceptible. Si fBTP o/y fBTp disminuyen, tBOFF aumenta,
siendo el efecto debido a la presión muy importante y el de rotación algo más débil. Si
fL aumenta, tBOFF crece pero sin percepción aparente.
Así, para cada carga, se aplica el algoritmo de optimación para determinar los factores
de ajuste fBTp y fBTP. En este punto, los análisis efectuados han mostrado como los
mejores resultados se obtienen definiendo la función objetivo únicamente como función
del tiempo de extinción del motor base burn.
A continuación, para cada carga y ángulo de tiro, se vuelve a aplicar el algoritmo de
optimación para determinar los factores de ajuste f(iBB,MT) y fL definiendo aquí la
función objetivo función del alcance y la deriva únicamente, ya que se ha determinado
que así se obtienen los mejores resultados.
Se va a esquematizar todo el proceso de resolución en los siguientes pasos:
1. Para cada carga, se aplica el algoritmo de optimación para determinar los
factores de ajuste fBTp y fBTP. Obtenido el tiempo de extinción del motor
base burn de experiencias realizadas, se calculan los factores de ajuste
fBTp y fBTP que mejor aproximen el tiempo de extinción del motor base
XIII.-30
burn. A través de experiencias realizadas se obtiene el tiempo de
extinción del motor base burn, que se designará como tBi-exp para
diferentes ángulos de tiro, definiendo la función objetivo como
i=m
E = ∑ t Bi − t Bi −exp
i =1
t Bi −exp = t Bi −exp (MVi )
(
t Bi−exp = t Bi−exp MVi , f BTp , f BTP
)
siendo los términos tBi los obtenidos como resultado de haber realizado
todo el proceso de cálculo en función de los factores de ajuste fBTp y fBTP.
En este paso se tomará f(iBB,MT) = 1 y fL = 1 .
2. A continuación, para cada carga y ángulo de tiro, se aplica el algoritmo
de optimación para determinar los factores de ajuste f(iBB,MT) y fL.
Obtenido el alcance y la deriva de experiencias realizadas, se calculan los
factores de ajuste f(iBB,MT) y fL que mejor aproxime el alcance y la
deriva. A través de experiencias realizadas se obtiene el alcance y la
deriva, que se designaran como alcanceexp y derivaexp, para cada ángulo
de tiro, definiendo la función objetivo como
E = walc (alcancei − alcancei −exp ) + wder (derivai − derivai −exp )
2
alcancei −exp = alcancei −exp (QEi , MVi )
derivai −exp = derivai −exp (QEi , MVi )
alcancei = alcancei (QEi , MVi , f (iBB , MT ), f L )
derivai = derivai (QEi , MVi , f (iBB , MT ), f L )
XIII.-31
2
siendo los términos alcance y deriva los obtenidos como resultado de
haber realizado todo el proceso de cálculo en función de los factores de
ajuste f(iBB,MT) y fL. Los parámetros walc y wder son factores de peso que
pueden ser diferentes dependiendo del paréntesis al que vayan a afectar y
que permiten favorecer un requisito en perjuicio de los otros. Esto
conlleva a que es necesario seleccionar el peso que afecta a cada uno de
los paréntesis.
Los factores de ajuste fBTp y fBTP se han calculado en el apartado anterior
para cada carga.
Obtenido los factores de ajuste f(iBB,MT) y fL para cada ángulo de tiro, se
pueden determinar los siguientes polinomios mediante un ajuste por
mínimos cuadrados
f (iBB , MT ) = iBB( MT =21) + b1 ⋅ (MT − 21) + b2 ⋅ (MT − 21) + b3 ⋅ (MT − 21)
2
3
iBB( MT = 21) = a0 + a1 ⋅ (QE ) + a2 ⋅ (QE ) + a3 ⋅ (QE )
2
3
f L = a0 + a1 ⋅ (QE ) + a2 ⋅ (QE ) + a3 ⋅ (QE )
2
3
Se ha considerado apropiado para este cálculo la siguiente condición de parada: L =
100, K1 = 4, ∈1 = 0.5 , K2 = 4, ∈2 = 0.5 y M = 1000.
Se ha aplicado el anterior procedimiento para localizar los términos t B* , m& *f0 y tB - tDI del
proyectil de artillería M864 US CBL/DUP BB2, y compararlos con los
correspondientes coeficientes de dicho proyectil. El proyectil M864 US CBL/DUP BB2
se ha disparado desde un tubo M198, con tres cargas (la más alta, la más baja y una
intermedia) y a cinco ángulos de tiro diferentes (300, 500, 700, 900 y 1200 milésimas).
Dado que se conoce el tiempo de retraso a la ignición del motor base burn tDI, se tomará
este valor tDI = 0.5 s, mientras que para el tiempo de referencia de retraso a la ignición
XIII.-32
*
*
se tomará su valor conocido t DI
= 0.5 s. Así, se ha obtenido
del motor base burn t DI
m& *f0 = 1.0 , como era de esperar, siendo t B* = 23.064 y tB - tDI = 23.303 . Considerando
los valores reales: t B* = 23.0 , tB - tDI = 22.50541 (carga M232/5H CH5H), tB - tDI =
23.50541 (carga M232/5H CH4H) y tB - tDI = 23.50541 (carga M232/5H CH3H), puede
observarse los excelentes resultados obtenidos. En este tratamiento, por simplicidad, se
ha considerado que la duración del motor base burn tB - tDI toma el mismo valor para
todas las cargas, dada la pequeña diferencia existente de una carga a otra.
Se ha utilizado el anterior procedimiento al proyectil de artillería OE155F2RTC FR
HEA BB1, el cual ha sido calculado originalmente por el método 1, y ahora se resolverá
aplicando el método 2. El proyectil OE155F2RTC FR HEA BB1 se ha disparado desde
un tubo 155AUF1, con tres cargas (la más alta, la más baja y una intermedia) y a cinco
ángulos de tiro diferentes (300, 500, 700, 900 y 1200 milésimas).
Como proyectil base burn semejante se ha considerado en esta primera fase de cálculo
el proyectil M864 US CBL/DUP BB2, considerando el cambio en la presión de base
adimensional para cambios en el parámetro de inyección de propulsante δBP δI , la
derivada de referencia de la masa de propulsante del motor m& *f , el factor del tiempo de
quemado de la velocidad de rotación axial del proyectil base burn fBTp y el factor del
tiempo de quemado de la presión del aire atmosférico local del proyectil base burn fBTP.
La presión de referencia del aire atmosférico local Pr y la velocidad de rotación axial de
referencia pr se calculan aplicando las relaciones obtenidas anteriormente. El tiempo de
retraso a la ignición del motor base burn tDI es dato y el tiempo de referencia de retraso
*
*
se tomará como t DI
= t DI .
a la ignición del motor t DI
Determinados apropiadamente los coeficientes base burn, se deben establecer a efectos
de ajustes finales los factores de ajuste para la correcta modelización numérica, según el
Modelo Modificado de Masa Puntual para proyectiles base burn método 2. A
continuación se adjuntan los ficheros bb2.txt y ff.txt para las cargas DLE-CE-155F1/7
C7 (MV = 825 m/s), DLE-CE-155F1/7 C4 (MV = 591 m/s) y DLE-CE-155F1/7 C1 (MV
= 362 m/s).
XIII.-33
1599.0 1.0
QD 1.0
QM 1.0
XIII.-54
XIII.-55
XIII.-56
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO XIV
CONCLUSIONES
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
XIV.-1
XIV.-2
XIV.-CONCLUSIONES
En este trabajo se ha mostrado la tecnología asociada a un proyectil base burn, su
modelización y tratamiento matemático. Partiendo de fuentes fundamentales como los
STANAG 4355 y 4144 e incorporando información obtenida del estudio de los códigos
de software de NABK (NATO Armaments Ballistic Kernel) se ha podido clarificar la
modelización del vuelo de un proyectil base burn.
La primera dificultad encontrada ha sido que la modelización de proyectiles base burn
se ha incluido en el STANAG 4355 de dos modos distintos. Por un lado, se tiene el
método 1 (método empleado por los países francófonos) y por el otro, el método 2
(método desarrollado por los EE.UU. y empleado por los países anglófonos). Estos dos
métodos son completamente diferentes siendo la comunalidad de las bases de datos
prácticamente cero. La utilización de uno u otro modelo depende del fabricante del
armamento y cada uno de ellos tiene sus inconvenientes y sus ventajas. El método 1
resulta más intuitivo al utilizar conceptos como velocidad de combustión, densidad del
propulsante y superficie de quemado agregando al sistema de siete ecuaciones del
Modelo Modificado de Masa Puntual una ecuación de variación de la masa, mientras
que el método 2 incorpora tres ecuaciones más: la ecuación de variación de la masa, la
del pseudotiempo y la del tiempo de apagado del motor.
Estas ecuaciones adicionales incluyen coeficientes relativos al proceso de quemado del
propulsante así como a la disminución de la resistencia producida por el aumento de la
presión en la base. En esta tesis se ha construido un procedimiento para la
determinación de estos coeficientes a través de información de alcance, deriva y tiempo
de extinción del motor base burn obtenida de experiencias realizadas mediante la
resolución de un problema de optimación complejo, desarrollando para ello una serie de
herramientas numéricas. Finalmente, el procedimiento permite calcular los cuatro
factores de ajuste exigidos en los STANAG 4355 y STANAG 4144, para la correcta
modelización numérica del Modelo Modificado de Masa Puntual para proyectiles base
burn.
Dado que se dispone de los parámetros correspondientes que modelizan el vuelo de los
XIV.-3
proyectiles de artillería OE155F2RTC FR HEA BB1 y OE155BONUS FR CBL/DUP
BB1, según el método 1; se ha validado la eficacia del algoritmo desarrollado en esta
tesis para dicho método aplicando el procedimiento a estos proyectiles y comparando
satisfactoriamente los resultados obtenidos con los correspondientes parámetros
originales que caracterizan su vuelo.
Análogamente, como se dispone de los parámetros correspondientes que modelizan el
vuelo del proyectil de artillería M864 US CBL/DUP BB2, según el método 2; se ha
validado la eficacia del algoritmo desarrollado en esta tesis para dicho método
aplicándole el procedimiento y comparando satisfactoriamente los resultados obtenidos
con los correspondientes parámetros originales que caracterizan el vuelo de dicho
proyectil.
Posteriormente, se ha validado la eficacia del algoritmo desarrollado en esta tesis para el
método 1 resolviendo el problema para el proyectil de artillería M864 US CBL/DUP
BB2, el cual había sido calculado originalmente por el método 2.
Asimismo, se ha validado la eficacia del algoritmo desarrollado en esta tesis para el
método 2 resolviendo el problema para los proyectiles de artillería OE155F2RTC FR
HEA BB1 y OE155BONUS FR CBL/DUP BB1, lo cuales habían sido calculados
originalmente por el método 1.
Finalmente, se ha validado la eficacia del algoritmo desarrollado en esta tesis tanto para
el método 1 como para el método 2 resolviendo el problema para el proyectil de
artillería ER-50/BB SP HEA BB1. EXPAL (Explosivos Alaveses S.A.) desarrolló este
nuevo proyectil para aumentar las prestaciones en el campo de la artillería de 105 mm.
Resumiendo, la principal aportación de esta tesis ha sido el desarrollo de algoritmos que
permiten la completa resolución del problema de cálculo de trayectorias base burn a
través de datos extraídos de experiencias y la consiguiente determinación de los
coeficientes necesarios para caracterizar apropiadamente el vuelo del proyectil tanto con
el método 1 como con el método 2.
Esta tesis ha abierto la visión a una nueva tecnología que puede utilizarse en un
XIV.-4
desarrollo futuro a la modelización de proyectiles de propulsión adicional (RAP) según
el Modelo Modificado de Masa Puntual o incluso también para cohetes.
En estos momentos, los códigos de software de NABK (NATO Armaments Ballistic
Kernel) constituyen la punta de lanza del cálculo balístico; sin embargo, presentan la
limitación de que solo se puede trabajar con los proyectiles existentes en su base de
datos. Los métodos desarrollados en esta tesis constituyen una base tecnológica para el
desarrollo de una aplicación que permita el cálculo de los coeficientes balísticos que
alimentan las FCI (Fire Control Inputs) de NABK.
XIV.-5
XIV.-6
ESCUELA POLITÉCNICA SUPERIOR DEL EJÉRCITO
TESIS DOCTORAL
CAPÍTULO XV
BIBLIOGRAFÍA
MODELIZACIÓN DE PROYECTILES BASE
BURN
Director: Dr. Coronel Francisco Cucharero Pérez
Doctorando: Comandante Fernando Aguirre Estévez
XV.-1
XV.-2
XV.-BIBLIOGRAFÍA
14.1
Alkhamis, T. M., Hasan, M. y Ahmed, M. A., Simulated annealing for the
unconstrained quadratic pseudo-Boolean function, European Journal of
Operational Research, nº 108, pp. 641-652, 1998.
14.2
Arroyo Sánchez, J. M., Modelos y Algoritmos para la explotación óptima de la
generación en sistemas eléctricos centralizados y competitivos mediante
algoritmos genéticos y programación lineal entera mixta, Tesis Doctoral
Universidad de Castilla-La Mancha, 2000.
14.3
Bölte, A. y Thonemann, U. W., Optimizing Simulated annealing Schedules with
genetic Programming, European Journal of Operational Research, nº 92, pp.
402-416, 1996.
14.4
Canales Cano, S., Métodos Heurísticos en problemas geométricos Visibilidad,
Iluminación y Vigilancia, Tesis Doctoral Universidad Politécnica de Madrid,
2004.
14.5
Casillas, A., González de Lena, M. T. y Martínez R., Algoritmo de Clustering
On Line utilizando Metaheurísticas y Técnicas de Muestreo, XIX Congreso de
SEPLN, 2004.
14.6
Chambers, L., Practical handbook of genetic algorithms, CRC Press, 1995.
14.7
Chapra, S. C. y Canale, R. P., Métodos Numéricos para Ingenieros, McGraw
Hill, 1999.
14.8
Chargelegue, D. y Couloumy, M. T., Base Burn Projectile Trajectory Model,
11th International Symposium on Ballistics, pp. FD-10/1-FD-10/9, 1989.
14.9
Cheney, W. y Kincaid, D., Numerical Mathematics and Computing, Brooks
Cole, 2004.
14.10 Clark, J. C., Optimisation Heuristic for Cryptology, Tesis Doctoral Queensland
University of Technoloy, 1998.
14.11 Cucharero Pérez, F., Balística Exterior, Ministerio de Defensa, 1992.
14.12 Da Riva, I., Aerodinámica, Escuela Técnica Superior de Ingenieros
Aeronáuticos, Madrid, 1996.
14.13 Danberg, J. E., y Nietubicz, C. J., Predicted Flight Performance of Base Bleed
Projectiles, Journal of Spacecraft and Rockets , Vol. 29, nº 3, pp. 366-372,
mayo-junio 1992.
XV.-3
14.14 Danberg, J. E., y Nietubicz, C. J., Predicted Flight Performance of Base Bleed
Projectiles, 13th International Symposium on Ballistics, pp. 163-170, 1992.
14.15 Davis, L., Handbook of Genetic Algorithms, Van Nostrand Reinhold, 1991.
14.16 Díaz, A. y Glover, F., Optimización Heurística y Redes Neuronales, Paraninfo,
1996.
14.17 Dowsland, K. A. y Adenso Díaz, B., Heuristic design and fundamentals of the
Simulated Annealing, Inteligencia Artificial Revista Iberoamericana de
Inteligencia Artificial, nº 19, pp. 93-102, 2003.
14.18 Garrido, S., Identificación, Estimación y Control de Sistemas No-Lineales
mediante RGO, Tesis Doctoral Universidad Carlos III, 1999.
14.19 Goldberg, D. E., Genetic Algorithms in Search, Optimization and Machine,
Addison-Wesley Reading, 1989.
14.20 Guo, X. y Wei Y., Reasonable Design of Bleeding Drag Reduction characteristic
of Base Bleed Projectile, 15th International Symposium on Ballistics, 1995.
14.21 Hernandez López, M., Predicción económica con algoritmos genéticos:
operadores genéticos versus matriz de transición, Estadística Española, Vol. 46,
nº 157, pp. 389-407, 2004.
14.22 Ingber, L., Adaptive Simulated Annealing (ASA): Lessons learned; Technical
Report, Control and Cybernetic McLean VA 22101, 1995.
14.23 Janiga, P., Simard, M. y Lebegern, C., Substantiation of the Swedish Base Bleed
Model using 155 mm ERFB (NR265) Base Bleed Projectile data obtained from
Firing of cannons up to 52 calibers in length, 14th International Symposium on
Ballistics, 1993.
14.24 Katayama, K. y Narihisa, H., Performance of simulated annealing-based
heuristic for the unconstrained binary quadratic programming problem,
European Journal of Operational Research, nº 134, pp. 103-119, 2001.
14.25 Kayser, L. D., Ground Testing for Base Burn Projectile Systems, Tenth
International Symposium on Ballistics, 1987.
14.26 Lieske, R. F. y Danberg, J. E., Modified Point Mass Trajectory Simulation for
Base Burn Projectiles, Technical Report BRL TR 3321, Ballistic Research
Laboratory Aberdeen Proving Ground, 1992.
14.27 Lin, C. K. Y., Haley, K. B. y Sparks, C., A comparative study of both standard
and adaptive versions of threshold accepting and simulated annealing algorithms
in three scheduling problems, European Journal of Operational Research, nº 83,
XV.-4
pp. 330-346, 1995.
14.28 López de Haro, S., Sánchez Martín, P. y Conde Collado J., Secuenciación de
tareas mediante metaheurísticos, VIII Congreso de Ingeniería de Organización,
2004.
14.29 Mathur, T. y Dutton, J. C., Base-Bleed Experiments with a Cylindrical
Afterbody in Supersonic Flow, Journal of Spacecraft and Rockets , Vol. 33, nº 1,
pp. 30-37, enero-febrero 1996.
14.30 Matlab R2006a.
14.31 Melián, B., Moreno Pérez, J. A. y Moreno Vega J. M., Metaheuristics: A global
view, Inteligencia Artificial Revista Iberoamericana de Inteligencia Artificial, nº
19, pp. 7-28, 2003.
14.32 Melián, B., Optimización Metaheurística para la planificación de redes WDM,
Tesis Doctoral Universidad de la Laguna, 2003.
14.33 Michalewicz, Z., Genetic algorithms + data structures = evolution programs,
Springer Verlag, 1994.
14.34 Mitchell, M., An introduction to genetic algorithms, Morgan Kaufmann
Publishers, 1991.
14.35 Papageorgiou, G., Likas, A. y Stafylopatis, A., Improved exploration in Hopfield
network state-space through parameter perturbation driven by simulated
annealing, European Journal of Operational Research, nº 108, pp. 283-292,
1998.
14.36 Pérez Crusells, S., Cálculo de Motores Cohete con Propulsante Sólido, 2000.
14.37 Pirlot, M., General local search methods, European Journal of Operational
Research, nº 92, pp. 493-511, 1996.
14.38 Press, W. H., Numerical Recipes in C: the art of scientific computing,
Cambridge University Press, 2002.
14.39 Rawlins, G. J. E., Foundations of Genetic Algorithms, Morgan Kaufmann
Publishers, 1991.
14.40 Ríos Insua, D., Ríos Insua, S. y Martín Jiménez, J. R., Simulación: métodos y
aplicaciones, Ra-Ma, 1997.
14.41 STANAG 4144, Procedures to determine the fire control inputs for use in
indirect fire control (2ª Edición), 2002.
14.42 STANAG 4355, The modified point mass trajectory model (3ª Edición), 2007.
14.43 Steeb, W., The nonlinear workbook: chaos, fractals, cellular automata, neural
XV.-5
networks, genetic algorithms, fuzzy logic with C++, Java, Symbolic C++ and
reduce programs, World Scientific, 1999.
14.44 Villalobos Arias, M. A., Algoritmos Genéticos: algunos resultados de
convergencia, Mosaicos Matemáticos, nº 11, pp. 53-60, diciembre 2003.
14.45 Wik, T. y Gustafsson, H., A new Method to calculate Trajectories of Base Bleed
Projectiles, 14th International Symposium on Ballistics, pp. 737-744, 1993.
14.46 Zalzala, A. M. S., Genetic algorithms in engineering systems, Institution of
electrical Engineers, 1997.
XV.-6
XV.-7
XV.-8