Control de Flujo Refrigerante en una Bomba de Calor por
Anuncio

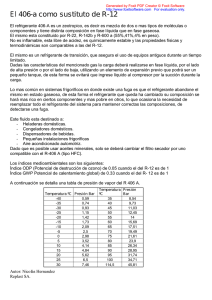
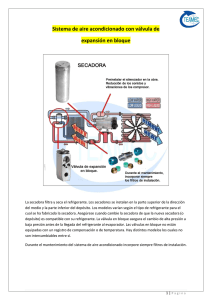
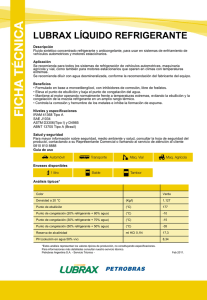
1 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 Encuentro de Investigación en Ingeniería Eléctrica Zacatecas, Zac, Abril 5 — 7, 2006 Control de Flujo Refrigerante en una Bomba de Calor por Absorción de una Etapa José Andrés Alanís Navarro1, Dario Carlos Labastida del Toro1, Maribel Fernández Resenos1, Rosenberg J. Romero2,* 1 Instituto Nacional de Astrofísica, Óptica y Electrónica, Enrique Erro s/n, Col. Centro, Sta Ma. Tonantzinta, Puebla 2 Centro de Investigación en Ingeniería y Ciencias Aplicadas – UAEM, Av. Universidad 1001, Chamilpa, 62209, Cuernavaca, Morelos: +(777)3297084, correo-e: [email protected] Resumen — En este trabajo se explica la necesidad de control de flujo refrigerante en las bombas de calor por absorción. Se determina el comportamiento del flujo en el sistema y con base en éste se diseña una estrategia de control del flujo refrigerante, por medio del uso de LabView© y variadores de frecuencia acoplados a motores de bombas. Se describen los elementos electrónicos mínimos para realizar el control y se concluye con una interfaz de usuario para el control por medio de una computadora personal usando el puerto de comunicación DB25. Abstract — In this work, necessity of control of coolant flow is explained in the absorption heat pumps. The behavior of the flow is defined in the system, based on this behavior a strategy of control of the coolant flow is designed by means of the LabView© software and frequency controllers coupled to motors of pumps. The elements electronic minima are described to carry out the control and it concludes with user's interface for the control by means of a personal computer using the DB25 communication port. Palabras clave – Bombas de calor, control, flujo, LabView© I. INTRODUCCIÓN U NA bomba de calor por absorción es un sistema termodinámico que posee la capacidad de incrementar el nivel térmico de un efluente, a una temperatura mayor por medio del potencial químico obtenido de la reacción exotérmica de la dilución de un absorbente en un fluido [1]. La operación de estos sistemas es compleja por el número de variables involucradas en el proceso que conduce a un estado permanente de equilibrio. El equilibrio térmico es alcanzado por medio del control de los flujos circulantes internos, de los cuales existe un flujo limitante denominado “flujo refrigerante” que es constante en 3 de las 5 principales líneas de flujo másico. II. BOMBAS DE CALOR Las bombas de calor por absorción operan en ciclos continuos para extraer energía térmica, por medio de un fluido refrigerante; éste fluido refrigerante es calentado a una temperatura T1 en donde alcanza el estado de saturación a una presión constante definida P1. Esto se puede apreciar en la figura 1. En esta figura la P1 corresponde a la presión de evaporación y la P7 a la de condensación, respectivamente. En el sistema se pueden considerar dos zonas de presión la zona de presión idéntica a la presión de evaporación PEV = P1 = P2 = P3 = P8 y la zona de presión de condensación PCO = P4 = P 5 = P6 = P 7 La diferencia de presiones entre P7 y P8, requiere de bombeo de fluido refrigerante (indicado en el esquema con líneas entrecortadas). Este flujo es una variable en la eficiencia del sistema. La eficiencia del sistema se ha denominado Coeficiente de Operación (COP) y es una función de la cantidad de energía con mayor temperatura, obtenida consecuentemente del equilibrio termodinámico en el absorbedor (QAB) en relación a la energía suministrada en el generador (QGE) y evaporador (QEV). 205 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 COP = Q AB QGE + QEV función de las entalpías y QEV’ es la potencia del evaporador de la bomba de calor. (1) Con base en lo propuesto, el control se ha limitado a restringir las revoluciones por minuto de un motor. Esta relación es inversamente proporcional a la relación de flujo (FR): COP = f-1(FR) (2) Donde FR se define [1] como el flujo del absorbedor entre el flujo del refrigerante: FR = M AB M EV (3). V. PROCEDIMIENTO Y ALCANCE En éste proyecto en particular, se utilizó el software LabVIEW [2] por su sencilla interfaz de usuario, y de sus recursos se utilizó la comunicación por el puerto paralelo ‘DB25’. Los objetivos son a) Diseñar un sistema de control automático para estabilizar la temperatura mediante control de flujo, b) Controlar el flujo de un líquido, a partir del control de la velocidad de un motor de DC. Los materiales empleados son: En la figura 1, esta relación corresponde a M3 / M1. Por lo anterior, concluimos que la eficiencia del sistema tiene una dependencia con el flujo del refrigerante M1. III. CONTROL DEL FLUJO REFRIGERANTE El flujo refrigerante en la bomba de calor (M1) está limitado por la potencia de evaporación por medio de la siguiente relación termodinámica. M1 = QEV , h1 − h8 (4) Donde h1 y h8 corresponden a la entalpía de vaporización del fluido refrigerante y a la entalpía del líquido sub-enfriado, respectivamente. Estas funciones fisicoquímicas han sido tomadas de un trabajo previo [1]. IV. ESTRATEGIA DE CONTROL Partiendo de la suposición que los valores h1 y h8 son constantes, el inverso de la diferencia de entalpías es la constante de proporcionalidad de la potencia QEV para el valor de flujo refrigerante. El control del flujo refrigerante está basado en un motor que responde de 0 a 3,600 rpm, que está a su vez acoplado a una bomba de engranes que dosifica 1.12 mg/rpm. A partir de estas dos condiciones reales y las suposiciones de las entalpías, se tiene la siguiente restricción de control: (M1’) (Φ) = k QEV’ (5) Donde M1’ es el flujo controlado en función de las revoluciones por minuto, Φ es el número de revoluciones por minuto inducidas, k es una constante de proporcionalidad Transformador con derivación central [120ca/24Vca] a 1.2 amperes Regulador a 5Vcd [7805] Regulador a 15Vcd [7815] Capacitor electrolítico 2200 µF a 50 Vcd Cable paralelo [DB25] Conector DB25 macho Motor 1 a pasos 7.5° por paso a 36 Vcd Controlador 1 para motores en circuito integrado [L293B] Motor 2 de corriente directa [0-90]Vcd de [1/10]hp Controlador 2 de potencia de motor 2 VI. RESULTADOS El control de flujo se consigue controlando la velocidad de giro del motor, para éste control de velocidad se empleó un controlador (existente) diseñado específicamente para este motor, el cual compensa su velocidad debido a la presencia externa de cargas. El controlador cuenta con un botón de encendido y una perilla (potenciómetro 10 KΩ) que permite regular la velocidad del motor en un rango que va de 0-3600 rpm. El motor se conecta a la tubería de enfriamiento mediante un cilindro, una vez unidos, la velocidad del giro del motor se verá reflejado proporcionalmente en la cantidad de flujo circulante, lo que permitirá la estabilización de la temperatura del sistema. En esta etapa se realizó el programa del sistema de control, esencialmente consta de un acumulador ascendente / descendente el cual lleva el conteo de los pasos del motor 1, con el fin de conocer su posición en todo momento, 2 perillas de control, para la selección de las revoluciones por minuto a las que operará el motor 2 y otra para seleccionar el tiempo de respuesta del sistema, aprovechando su respuesta lineal entre el potenciómetro y el flujo refrigerante. 206 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 Cuenta además, con una etapa de lectura de archivos de texto, lo cual le permite la operación automática, por medio del software de adquisición de datos. El suministro eléctrico se consiguió a partir de la alimentación [Vca] del controlador 2. Mediante rectificación de onda completa de la señal de corriente alterna, y regulación con circuitos integrados. En la etapa de potencia para el control del motor a pasos se empleó el circuito integrado L293B el cual consta de 4 compuertas con una señal de activación independiente, sus entradas son manejadas con pulsos TTL, y puede entregar a la salida de cada compuerta de [4.5-36] Vcd para la potencia requerida para su movimiento [3]. Implementamos un mecanismo que permite modificar físicamente la posición angular de la perilla del potenciómetro del controlador 2, el motor se colocó en posición invertida al eje (denominado como cañón) del potenciómetro, quedando unidos rotor-cañón para conseguir que el movimiento del motor sea proporcional al movimiento del potenciómetro. El programa LabView© para este control se muestra en la figura 2, este diagrama muestra la lógica utilizada para el control de los motores. En la figura 3 se muestra el diagrama eléctrico de la etapa de potencia implementada y en la figura 4 el panel de control de la interfaz de usuario. Las características del sistema de control demandadas [4] por la bomba de calor y que se han cumplido son: Tensión de alimentación [24, 15 y 5] Vcd Interfaz DB25 Tiempo de respuesta [40 - 500]ms Modo de operación ‘manual’ desde la PC / controlador ó automática VII. CONCLUSIONES Y TRABAJOS FUTUROS Diseñamos y construimos un sistema de control de flujo refrigerante en una bomba de calor por absorción de una etapa. Se calculó y correlacionó el flujo refrigerante por medio de un sistema lineal con las rpm como variable de control y se realiza el control por medio de potenciómetro manual o por medio del puerto de impresoras de una computadora personal. Este sistema se ampliará al control de 3 mecanismos similares utilizando los mismos recursos, una interfaz DB25 de la PC y el software LabVIEW. REFERENCIAS [1] Romero R. J.; Rivera W; Best R. Comparison of the theoretical performance of a solar air conditioning system operating with water / lithium bromide and an aqueous ternary hydroxide; Solar Energy Materials & solar Cells, Vol. 63, pp 387 – 399, 2000 [2] Manual de Referencia de LabView 6i, 2000 [3] Boylestad, Robert y Nashelsky, Louis; Electrónica: Teoría de circuitos, Pp 805 – 826, 1994 [4] Romero R. J.; Rivera W.; Pilatowsky I.; Best R.; Comparison of the modeling of a solar absorption system for simultaneous cooling and heating operating with an aqueous ternary hydroxide and with water / lithium bromide; Solar Energy Materials & solar Cells, Vol. 70, pp 301 – 308, 2001 AGRADECIMIENTOS Al proyecto PROMEP – UAEMOR - PTC73 por el apoyo financiero. 207 Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 Ln (P) Presión atmosférica PEV 1 Evaporador Absorbedor 3 2 8 4 7 PCO 6 Condensador 5 Generador (-1 / T) Figura 1. Diagrama esquemático de una bomba de calor por absorción 4 0 1 10 ---- Sistema de control de flujo ---- 100 1000 Salida de datos por el puerto paralelo bits[0:3] 378 1 3 10 Control del giro del motor 100 0 C:\ posicion.txt 1 -1 0 -1 0 0 4 Selección de Giro del motor 1 = Derecha -1 = Izquierda 0 = Ninguno -4 Acumulador de pasos de motor 0 Lógica que indica demanda alcanzada: posición motor = posición demandada 0 Posibles posciones demandadas para motor a pasos 0 3 6 9 12 15 18 21 257 Selector de 'rpm' 24 27 30 Demanda de revoluciones desde C:\ posicion.txt 33 36 39 41 10 3600 14 Tiempo de respuesta (ms) Selector de funcionamiento archivo/ perilla Figura 2. Programa en LabView para control del flujo. Encuentro de Investigación en IE, 5 — 7 de Abril, 2006 Figura 3. Diagrama eléctrico para conexión y control de rotor. Figura 4. Interfaz de usuario para control de flujo refrigerante. 208