- Ninguna Categoria
¿El problema es el transmisor, el motor o la carga?
Anuncio
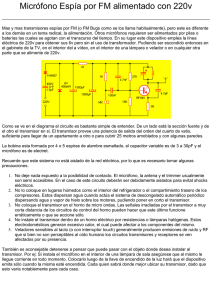
¿El problema es el transmisor, el motor o la carga? ¿Por dónde empezar a diagnosticar las fallas? A la hora de diagnosticar fallas relacionados con el motor, más de la mitad del proceso consiste simplemente en aislar el problema. Siempre que haya un motor en funcionamiento, también hay una carga y algún tipo de transmisor del motor, que tiende cada vez más a tratarse de una unidad de velocidad variable (ASD). Así que, cuando surgen problemas, ¿cómo puede saber si se trata del transmisor, del motor o de la carga? A continuación, le damos algunos consejos para que pueda diagnosticar el problema de forma rápida y sistemática, solo tiene que hacer algunas mediciones clave sobre la marcha. Mediciones del desequilibrio Un buen punto de partida consiste en medir la corriente que consume el motor. En este contexto, cuando hablamos de motores, nos referimos a motores de inducción trifásicos, el caballo de batalla de la industria. Los motores son cargas equilibradas: la corriente que consumen en cada fase debe ser prácticamente la misma (inferior Nota sobre la aplicación al diez por ciento, según el cálculo que se indica más abajo). Si no están equilibrados, podría deberse a un problema interno del motor (por ejemplo, al deterioro del aislamiento del estator) o podría ser el resultado del desequilibrio de la tensión. De modo que, si hay algún problema con el desequilibrio de la corriente, realice la medición del desequilibrio de la tensión (inferior al tres por ciento) a la salida del ASD. El siguiente cálculo sirve para el desequilibrio de la tensión o de la corriente. Las mediciones del desequilibrio de la tensión y de la corriente se deben realizar en el lado por donde se alimenta el transmisor. Los transmisores son muy sensibles al desequilibrio de la tensión, incluso más que los motores. Los transmisores utilizan la tensión máxima de cada fase para cargar las baterías internas del condensador. Si alguna de estas fases es incluso un poco baja, entonces será difícil que el transmisor consuma corriente de dicha fase. Por tanto, el desequilibrio de la tensión producirá el desequilibrio de la corriente. Aunque el transmisor siga funcionando, el ciclo de carga de los condensadores y el período de protección de los mismos disminuirán en caso de caída de tensión. Porcentaje de desequilibrio = desviación máxima de la media / media de tres fases X 100 % Ejemplo: 1.Según medidas: Fase A = 449 A, Fase B = 470 A y Fase C = 462 A 2.Cálculo de la media = (449 + 470 + 462) / 3 = 460 A 3.Cálculo de la desviación máx. = 460 – 449 = 11 A 4. Cálculo del desequilibrio = (11 / 460) x 100 % = 2,4 % Nota: los nuevos analizadores de calidad de la alimentación trifásica realizan estos cálculos automáticamente. Además de las mediciones del desequilibrio, también se deben comprobar las caídas de tensión entre conexiones sueltas. Esto se puede hacer con mediciones directas de la tensión o con termómetros infrarrojos. Las lecturas que son mucho más altas que la temperatura ambiente, o mucho más altas que otras fases, pueden indicar conexiones sueltas o defectuosas. De la Biblioteca digital Fluke en www.fluke.com/library Consejos sobre alto y bajo tensión del ASD Los transmisores tienen códigos de diagnóstico que identifican la causa del disparo. En general, se pueden clasificar como alta tensión, baja tensión o sobrecarga (sobrecorriente). Tenga en cuenta que los motores de arranque mecánicos sólo tienen disparos de sobrecarga. Por tanto, no tienen que preocuparse por casos de alta o baja tensión. ¿Qué diferencia a los transmisores? Los transmisores convierten la CA de las ondas senoidales en CC (sección del convertidor) y, posteriormente, vuelven a convertir la CC en CA (sección del inversor). Sin embargo, la CA que sale no es una onda senoidal. Se trata de una forma de onda especial conocida como señal modulada por ancho de impulso (PWM). Desde el punto de vista del motor, la PWM se acepta prácticamente como si fuera una onda senoidal (véanse las mediciones avanzadas del motor en la página 3). No obstante, vamos a centrarnos por ahora en los aspectos internos del transmisor, en concreto, en lo que se conoce comúnmente como enlace de CC. El enlace de CC no es más que una batería del condensador, que incluye normalmente un inductor (reactor) de enlace de serie para el filtrado y la protección. El transmisor controla detenidamente el enlace de CC; la alta o baja tensión hace referencia a la tensión del enlace de CC. La baja tensión puede originarse externamente a causa de caídas de tensión en la entrada del transmisor. La función de caídas y subidas en un analizador de calidad de la alimentación puede contribuir a identificar los problemas de baja tensión relacionados con la alimentación. También pueden existir problemas internos con el reactor y/o el condensador del enlace de CC. En muchos transmisores, existen puntos de prueba para medir la tensión del enlace de CC. Para comprobar los condensadores, utilice la función mín./máx. de un multímetro digital o, de ser posible, la función de tendencia de un analizador de calidad de la energía o de un osciloscopio. Compruebe si la regulación de la tensión está dentro de las especificaciones del fabricante. Para comprobar el reactor, revise la forma de onda en ambos lados. No debería haber cambios. 2 Fluke Corporation A la hora de diagnosticar las fallas en un sistema, se tiende a considerar el transmisor o al controlador lógico programable como lo más susceptible a las caídas de tensión. El relevador de control con caja transparente suele ser con frecuencia el origen de los problemas relacionados con las caídas de tensión. Los estudios han demostrado que estos componentes de bajo costo son los primeros en fallar cuando se producen caídas de tensión. Por lo tanto, cuando diagnostique fallas relacionados con paradas intermitentes del sistema, no olvide examinar los circuitos de control externos. La alta tensión puede ser indicio de problemas en los condensadores o en el reactor. También puede deberse a transiciones de tensión relacionadas con la alimentación. En un momento dado, las transiciones de cambio de los condensadores de la red de distribución se caracterizaban por causar disparos de alta tensión en los transmisores. La alta tensión también podía derivar de cargas regenerativas. Las cargas como grúas y ascensores devuelven tensión cuando frenan. La instalación de circuitos de frenado dinámicos tiene por objeto derivar esta energía del transmisor, donde, de lo contrario, se mostrarían como alta tensión en el enlace de CC. Problemas como una instalación inadecuada pueden dar lugar a disparos de alta tensión. Los problemas de sobrecarga normalmente están relacionados con la carga y se abordan a continuación. Perfil de carga Para solucionar los problemas relativos a la interacción entre la carga y el motor, es necesario comprender la relación entre el par y la corriente. Un motor no es otra cosa que un dispositivo que convierte la energía eléctrica (corriente) en energía mecánica rotativa (par), a través de los mágicos efectos del magnetismo. Lo que una carga demanda de un motor es el par. Para efectos práctico, este par es directamente proporcional a la corriente que consume el motor. Esto tiene sentido completamente, porque todos sabemos que en los motores de velocidad constante, que incluyen todos los motores de arranque directo (con motores de arranque electromecánicos), la tensión es, o debe ser, estable, y la corriente es la variable. Cuando una carga demanda más par y corriente ¿Se trata del transmisor, del motor o de la carga? de lo que puede suministrar un motor, se produce una condición de sobrecarga. La sobrecarga producirá el sobrecalentamiento del motor. Los transmisores del motor apagan el motor (y por lo tanto la carga) para impedir que se produzca un daño permanente del aislamiento del bobinado. La sobrecarga siempre depende del tiempo: una sobrecarga elevada disparará el motor en poco tiempo, mientras que, con un nivel más bajo de sobrecarga, el motor tardará más en dispararse. Cuando queramos evaluar el impacto de una carga en el sistema del transmisor del motor, debemos medir la corriente que consume. Naturalmente, este consumo de corriente varía con el tiempo conforme varía la carga. La medición de la corriente durante un período de tiempo se denomina perfil de carga. En la creación de un perfil de carga, la función de registro de alimentación de un analizador de calidad de la energía resulta ideal para capturar una línea de tendencia del consumo de corriente (y también los kW, si así lo desea). Un cursor le permite identificar los valores de corriente en diferentes puntos de la línea de tendencia, junto con una marca temporal para tales puntos. No es necesario medir las tres fases del motor de inducción porque el motor es una carga equilibrada. Antes de crear un perfil de carga, mida primero el desequilibrio de la corriente para asegurarse de que el estado del motor sea bueno. Si lo que le preocupa son los disparos inesperados, mida la fase de alta tensión (una sobrecarga en una fase disparará las tres fases). Al crear un perfil de carga, buscamos períodos de corriente especialmente altos en relación con el amperaje de la carga completa del motor. La información sobre el amperaje de la carga completa está disponible en la placa del motor. Si existe un factor de servicio, el cálculo del intervalo se debe realizar en función del amperaje de la carga completa. Mientras que la corriente alta es el principal problema, también hay que evitar la corriente baja. Un motor es más eficaz y tiene el mejor factor de potencia en el intervalo del 60 al 80 por ciento de su amperaje de carga completa. No hay una penalización inmediata por carga baja; el motor no se disparará. De hecho, muchos motores normalmente son demasiado grandes para la carga, sobre la teoría de que existe una menor probabilidad de que el motor se dispare por la sobrecarga. Sin embargo, como suele ser el caso, nada es gratis. En caso de carga muy baja, la compañía de energía le enviará una factura mayor. Dos cargas diferentes: par variable y par constante La mayoría de los sistemas de control se utilizan con cargas de par variable o de par constante. Entre las cargas de par variable se incluyen los ventiladores y las bombas giratorias. Desde el punto de vista del consumo de energía, actualmente, este es el caso de la mayoría de las cargas. Cuando se utilizan ASD con estas cargas, se puede ahorrar bastante energía. Por ejemplo, un ventilador a velocidad media (30 Hz) emplea idealmente un octavo de la potencia del mismo ventilador a 60 Hz (decimos que es lo ideal, porque siempre existe algún grado de pérdida debido a las ineficiencias del sistema de carga del motor de control). Desde el punto de vista del diagnóstico de problemas, lo más importante es que estas cargas de par variable raramente provocan problemas de sobrecarga para los transmisores (suponiendo que el tamaño de la carga se haya calculado correctamente). El motivo es que pasan gran parte del tiempo funcionando a velocidades más bajas (inferiores a 60 Hz) y consumiendo menos corriente. Si esto no fuera así, es decir, si la carga demandara velocidad (y par) completa la mayoría del tiempo o todo el tiempo, la instalación de un ASD al principio no tendría justificación económica (ahorros de energía). En ocasiones, estas cargas provocarán un disparo al inicio, pero eso suele indicar que el tamaño de la carga no se ha calculado correctamente con respecto al transmisor. Otra posibilidad es que la carga haya cambiado. Por ejemplo, un cojinete que empieza a agarrotarse demanda más par inicial para mover la carga. Las cargas de par constante pueden resultar un mayor desafío. Las cargas por fricción o gravitatorias son ejemplos de cargas de par constante. Lo que hay que comprender acerca de estas cargas es que requieren el mismo nivel de corriente (más o menos) a velocidades más bajas. Esto puede resultar peligroso para el motor. Normalmente, los motores se refrigeran con los ventiladores integrados en el rotor; cuando la velocidad del motor es 3 Fluke Corporation lenta, el ventilador enfría menos. Por lo tanto, se puede producir un calentamiento excesivo. El peligro radica en que los circuitos de sobrecarga del motor son para medir el calor midiendo indirectamente la corriente (hay motores con sensores de calor integrados en sus estatores, pero obviamente son más caros). Aquí tenemos una situación en la que el consumo de corriente normal a baja velocidad puede provocar sobrecalentamiento. La solución común consiste en instalar ventiladores alimentados externamente para enfriar el motor. Antes de dejar el tema de la solución de los problemas de carga, es necesario advertir que existe todo un campo de experiencia relacionado con las varillas mecánicas del motor y la carga. Aquí se incluye la vibración, la alineación de los ejes, el montaje del motor, etc. Si bien obviamente son problemas importantes, escapan del ámbito de este artículo. Mediciones avanzadas del motor En los sistemas de motores con ASD, es necesario realizar algunas mediciones que no se realizarían en los sistemas de motores de arranque mecánico (directo). Esto se debe a que el elemento de alta frecuencia y cambio rápido de la forma de onda de la salida PWM provoca problemas específicos que no ocasiona la onda senoidal. A primera vista, el motor como carga de consumo de corriente no parece otra cosa que un gran conjunto de inductores o bobinas (bobinados de estatores), y los inductores, por naturaleza, filtran los elementos de corriente de alta frecuencia. Este es el motivo de que la forma de onda de la corriente parezca una onda senoidal. Lamentablemente, esos elementos de alta frecuencia de la forma de onda de la tensión no se filtran y, en consecuencia, pueden ocasionar daños. Las dos primeras de estas mediciones se deben realizar con un osciloscopio o con la función de osciloscopio de un analizador de calidad de la energía: • Reflexiones de alta tensión. Mida fase a fase en los terminales del motor. Los flancos principales de los pulsos de PWM pueden tener valores máximos muy superiores (en teoría, hasta un 200 por ciento) a lo normal. Estas reflexiones de ¿Se trata del transmisor, del motor o de la carga? alta tensión pueden ocasionar daños a los bobinados del motor. Estas sobretensiones son claramente visibles en la forma de onda del osciloscopio. Las soluciones se clasifican en tres categorías: acortar la longitud del cable del motor de control, utilizar un motor con un grado de aislamiento mayor, los llamados motores en régimen de inversor, y utilizar filtros. • Tensiones del eje del motor y corrientes de los cojinetes. Mediante un alambre multifilar o una escobilla de carbón, mida la tensión del rotor al bastidor (tierra). Los motores que funcionan mediante ondas senoidales tienen una tensión “normal” del eje/cojinete al bastidor de entre 1 y 2 V. La forma de onda PWM puede dar lugar a que se produzcan tensiones disruptivas de entre 8 V y 15 V entre el eje (en particular, el cojinete) y el bastidor. Esto daña los cojinetes, haciendo que se piquen y presenten marcas. Aunque se han propuesto muchas soluciones, la más común es el dispositivo de puesta a tierra del eje. • Corriente de fugas. Con un amperímetro de gancho, mida la corriente alrededor de los conductores trifásicos. Las altas frecuencias provocan un aumento de las fugas entre los bobinados de estatores y el bastidor. Esta corriente de fugas o puesta a tierra puede interferir con las señales de control y comunicación. Algunas de las soluciones más comunes son el uso de cables de supresión de IEM o un arrancador (choke) de modo común. ¿Y qué sucede con los armónicos en la salida del transmisor? ¿La forma de onda PWM convertida en forma de onda de corriente senoidal contendrá muchos armónicos? Absolutamente, pero no tenemos que medirlos. En primer lugar, no afectan al resto del sistema de distribución de energía, sólo al motor. En concreto, provocan el calentamiento adicional del motor. Sin embargo, los fabricantes de motores y transmisores han solucionado este problema suministrando niveles más elevados de aislamiento del motor. En aquellos casos en los que un motor antiguo se actualice con un ASD, se recomienda reducir el amperaje de carga completa del motor. Resumen Seguridad en el trabajo A la hora de determinar si el problema es la carga, el motor o el transmisor, es importante proceder de forma sistemática. Comience con las mediciones básicas del motor (desequilibrio) para comprobar el estado del motor en sí. A continuación, lleve a cabo algunas mediciones sencillas para comprobar las causas de los disparos de alta o baja tensión. Realice un perfil de la carga para averiguar la causa de los disparos intermitentes de sobrecarga. Para finalizar, en el caso de fallos prematuros de los cojinetes o los bobinados del motor, así como de problemas de interferencia con la señal de control, utilice un instrumento como la herramienta de prueba Fluke ScopeMeter® para realizar mediciones adicionales del motor. Aunque con ello no se agoten todas las posibles causas de los problemas, seguro que se identificarán muchas de las más comunes. La tensión y las corrientes elevados presentes en los sistemas eléctricos pueden provocar graves lesiones o incluso la muerte por electrocución y quemaduras. Por consiguiente, la prueba y modificación de los sistemas eléctricos sólo deben llevarlas a cabo electricistas experimentados y cualificados que tengan conocimiento de los sistemas eléctricos en general y del equipo objeto de la prueba. Fluke no puede anticipar todas las posibles precauciones que hay que considerar al realizar todas las medidas indicadas en este documento. No obstante, como mínimo, debe: • Utilizar el equipo de seguridad adecuado como gafas de seguridad, guantes de protección, tapetes aislantes, etc. • Asegurarse de que toda la alimentación se haya desconectado, bloqueado y etiquetado en cualquier situación en la que vaya a estar en contacto directo con componentes de circuitos. Tener la certeza de que nadie, excepto usted, pueda activar la alimentación. • Leer y comprender todos los manuales aplicables antes de aplicar la información de esta nota de aplicación. Preste especial atención a todas las precauciones y advertencias de seguridad que se describen en los manuales de instrucciones. • No utilizar instrumentos en aplicaciones para las que no están indicados, y ser siempre consciente de que si el equipo se utiliza de una manera no especificada por el fabricante, la protección ofrecida por el equipo podría verse mermada. Fluke. Manteniendo su mundo en marcha.® Fluke Corporation PO Box 9090, Everett, WA 98206 EE. UU. Fluke Europe B.V. PO Box 1186, 5602 BD Eindhoven, Países Bajos Para obtener más información, puede llamar a: En EE. UU., (800) 443-5853 o Fax (425) 446-5116 En Europa/Oriente Medio/África, +31 (0) 40 2675 200 o Fax +31 (0) 40 2675 222 En Canadá, (800)-36-FLUKE o Fax (905) 890-6866 Desde los demás países, +1 (425) 446-5500 o Fax +1 (425) 446-5116 Sitio web: http://www.fluke.com ©2007-2011 Fluke Corporation. Las especificaciones están sujetas a cambios sin previo aviso. Impreso en EE. UU. 3/2011 4014350C A-ES-N No se permite ninguna modificación de este documento sin el permiso escrito de Fluke Corporation. 4 Fluke Corporation ¿Se trata del transmisor, del motor o de la carga?
 0
0
Anuncio
Documentos relacionados



Descargar
Anuncio
Añadir este documento a la recogida (s)
Puede agregar este documento a su colección de estudio (s)
Iniciar sesión Disponible sólo para usuarios autorizadosAñadir a este documento guardado
Puede agregar este documento a su lista guardada
Iniciar sesión Disponible sólo para usuarios autorizados