Segundo Parcial
Anuncio

GEOMETRÍA I 23 de septiembre del 2011
1. En el espacio ordinario se consideran las rectas
½
x−y+z =1
`1 :
2x + y − z = 2
`2 :
x−2
y+1
z
=
= .
3
2
a
Hallar a ∈ IR para que exista un plano π que contenga a `1 y sea perpendicular a `2 . Calcular la
ecuación del plano π que lo verifica.
Resp.: a = −2 y π : 3x + 2y − 2z = 3.
2. En un espacio ordinario hallar la ecuación del plano que pasa por el punto A(1, 0, −1), es perpendicular al plano π : x − y + 2z + 1 = 0 y es paralelo a la recta ` dada por las ecuaciones
x − 2y = 0; z = 0.
Resp.: 2x − 4y − 3z = 5.
3. Considerar la familia de planos 2λx + (λ + 1)y − 3(λ − 1)z + 2λ − 4 = 0 en el espacio ordinario.
Determinar el plano de esta familia que es paralelo a la recta ` : x + 3z − 1 = 0, y − 5z + 2 = 0.
Resp.: 4x + 3y − 3z = 0.
4. Hallar la ecuación de la recta que pasa por A(1, 1, 1), es paralela al plano π : x − y + z − 3 = 0 y
corta la recta ` : x = 1, y = 3.
Resp.: x = 1, y = z.
(Soluciones en la página siguiente)
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
1
SOLUCIÓN GEOMETRÍA I 23 de septiembre del 2011:
1) La dirección de la recta `1 está dada por el vector ~v1 = (1, −1, 1) × (2, 1, −1) = (0, 3, 3).
El vector director de la recta `2 es ~v2 = (3, 2, a).
Las rectas `1 y `2 han de ser perpendiculares, pues `1 ha de estar contenida en el plano π que además
debe ser perpendicular a `2 . Luego,
~v1 · ~v2 = (0, 3, 3) · (3, 2, a) = 0 ⇔ 6 + 3a = 0 ⇔ a = −2.
Para determinar un punto de π tomamos uno cualquiera de la recta `1 , contenida en él. Por ejemplo,
P (1, 0, 0).
Ası́, la ecuación del plano π, que pasa por P (1, 0, 0) y de vector perpendicular (3, 2, −2), es:
3(x − 1) + 2(x − 0) − 2(z − 0) = 0 ⇔ 3x + 2y − 2z = 3.
2) El plano que pasa por A(1, 0, −1) y contiene a los vectores ~u = (1, −1, 2), perpendicular al plano
π, y al vector ~v = (2, 1, 0), director de la recta `, es:
¯
¯
¯ x−1 y z+1 ¯
¯
¯
¯ = −2x + 4y + 3z + 5 = 0.
¯ 1
−1
2
¯
¯
¯ 2
1
0 ¯
3) Un vector perpendicular al plano a determinar ha de ser perpendicular a vector director de la recta
`. Es decir,
(2λ, λ + 1, −3(λ − 1)) · (−3, 5, 1) = 0 ⇔ −6λ + 5λ + 5 − 3λ + 3 = −4λ + 8 = 0 ⇒ λ = 2
El plano pedido tiene de ecuación:
4x + 3y − 3z = 0.
4) Un vector perpendicular al plano π es ~u = (1, −1, 1). La dirección de la recta ` viene dada por el
vector ~v = (0, 0, 1).
Un punto genérico de la recta ` es de la forma (1, 3, t), t ∈ IR.
La recta que se busca pasa por el punto A(1, 1, 1) y por algún punto de `; por lo que su vector director
será de la forma ~a = (0, 2, t − 1). Al ser paralelo a π, se tiene ~u · ~a = 0, porque ~u ⊥ ~a.
(1, −1, 1) · (0, 2, t − 1) = −2 + λ − 1 = 0 ⇒ λ = 3.
Luego, ~a = (0, 2, 2) y la ecuación de la recta que se busca es:
x−1
y−1
z−1
=
=
.
0
2
2
O sea x = 1, y = z.
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
2
GEOMETRÍA I 14 de octubre del 2011
1. Dadas las rectas x − y − 2 = 0, 3x − y + 2 = 0, determı́nese la ecuación de la recta que, pasando
por el punto P (1, 0), corte a las rectas dadas en los puntos A y B, tales que P A = P B.
√
2. Ecuaciones de la semejanza con centro (punto fijo) en S(6, 0) y en la que A(0, 0) y A0 (0, 6 3) son
homólogos.
Comprobar que es la composición del giro de centro S y en el que son homólogas las rectas SA y
SA0 con la homotecia de centro S y razón 2.
3. Hallar las coordenadas del centro del giro g2 = g1 t~v . siendo t~v la traslación que lleva el origen de
coordenadas al punto A(4, 4), y g1 el giro de centro A y amplitud 90◦ . Determinar las coordenadas
del punto B 0 homólogo de B(2, −2) en el giro g2 .
4. Se tiene un giro g1 de centro C1 el origen de coordenadas y de amplitud 45◦ , y otro giro g2 de centro
C2 (6, 6) y amplitud 90◦ . Calcular las coordenadas del centro C del giro g = g2 g1 , producto de los
anteriores, y la posición del punto A00 , homólogo del punto A(6, 0) en este nuevo giro.
5. En una traslación t~v , el punto A(4, 0) tiene por imagen el punto A0 (4, 6). ¿Qué magnitud ha de
tener un giro g de centro O(0, 0) para que la transformación producto t~v g sea una simetrı́a central?
Hallar el centro de esta simetrı́a y las coordenadas del punto imagen de A en dicha simetrı́a.
(Soluciones en la página siguiente)
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
3
SOLUCIÓN GEOMETRÍA I 14 de octubre del 2011:
1) Las ecuaciones de la simetrı́a central de centro en P (1, 0) son
x0 = −x + 2, y 0 = −y;
x = −x0 + 2, y = −y 0 .
Mediante esta simetrı́a la recta de ecuación x − y − 2 = 0 se transforma en la recta −x + y = 0. La
intersección de esta recta con la segunda del enunciado, 3x − y + 2 = 0, da el punto B(−1, −1).
El simétrico de B respecto a P nos da el punto A(3, 1) en la primera recta.
2) Teniendo en cuenta que las ecuaciones de una semejanza (directa) son:
x0 = ax + by + m,
y = −bx + ay + n,
√
y usando que S(6, 0) →
7 S(6, 0) y que A(0, 0) 7→ A0 (0, 6 3), resultan las ecuaciones de la semejanza
pedida:
√
√
√
σ : x0 = x + 3y, y = − 3x + y + 6 3.
De las ecuaciones de un giro de centro (a, b) y amplitud θ:
x0 = (x − a) cos θ − (y − b) sen θ + a
y 0 = (x − a) sen θ + (y − b) cos θ + b,
y teniendo en cuenta que el ángulo que forman las semirrectas SA
ecuaciones del giro de centro S(6, 0) y amplitud θ = −60◦ :
√
√
1
3
3
g : x0 = x +
y + 3, y 0 = −
x+
2
2
2
y SA0 es θ = −60◦ , se obtienen las
√
1
y + 3 3.
2
Las ecuaciones de la homotecia de centro A(a, b) y razón k, son:
x0 = k(x − a) + a
y 0 = k(y − b) + b.
La de razón 2 y centro S(6, 0) son:
x0 = 2x − 6,
h:
y 0 = 2y.
Sustituyendo estos valores en la ecuación del giro g se obtienen las ecuaciones de la semejanza σ.
3) La traslación dada está determinada por el vector ~v = (4, 4), y sus ecuaciones son:
x0 = x + 4,
t~v :
y 0 = y + 4.
Las del giro de centro A(4, 4) y amplitud 90◦ son:
g:
Ası́, el producto g t~v es:
x0 = −y + 8,
x0 = −y + 4,
y 0 = x.
y 0 = x + 4.
El punto fijo de este giro, (0, 4), es su centro. La imagen de B(2, −2) es B 0 (6, 6).
4) El giro de centro el origen y amplitud π/4 es:
g1 :
y
x
x0 = √ − √ ,
2
2
4
x
y
√ +√ .
2
2
El giro de centro en (6, 6) y amplitud π/2 es:
g2 :
x0 = −y + 12,
y 0 = x.
El producto de los giros g2 g1 es un giro de amplitud 3π/4:
x
y
x
y
x0 = − √ − √ + 12,
y0 = √ − √ .
2
2
2
2
Ã
√ !
³
√ √ ´
6 2
√ . La imagen del punto A(6, 0) es 12 − 3 2, 3 2 .
Su centro es su punto fijo: 6,
2+ 2
5) Las ecuaciones de la traslación son t~v : x0 = x, y 0 = y + 6. Las de un giro de amplitud θ y centro
en el origen son
g:
x0 = x cos θ − y sen θ, y 0 = x sen θ + y cos θ.
Para que la composición t~v ◦ g se una simetrı́a central de centro (a, b) se ha de verificar que:
(x cos θ − y sen θ, x sen θ + y cos θ + 6) = (−x + 2a, −y + 2b).
Es decir θ = π y (a, b) = (0, 3).
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
5
GEOMETRÍA I 28 de octubre del 2011
x−1
= y + 1 = z y el plano π : x + 3y + z − 4 = 0, hallar [3] la ecuación de la
1. Dados la recta ` :
2
recta proyección ortogonal de ` sobre π.
2. (a) Sea λX 0 = AX la ecuación matricial de una homografı́a en el plano ordinario ampliado con
los puntos del infinito, donde λ es un número real arbitrario, X y X 0 son matrices columna
formadas por las tres coordenadas homogéneas de un punto X y las tres de su imagen X 0 y A
es una matriz cuadrada de coeficientes reales reales, de orden 3 × 3, con determinante no nulo.
Si u0 x0 + u1 x1 + u2 x2 = 0 es la ecuación de una recta de coeficientes (u0 , u1 , u2 ), obtener [1]
la ecuación matricial que relaciona estos coeficientes con los de su recta imagen.
(b) Encontrar
√ [2] la ecuación de todos los giros en el plano que transforman la recta y = 0 en la
recta 3x + y = 0. ¿Cuál [1] es el lugar geométrico de los centros de tales giros?
3. Consideremos el plano ordinario ampliado con la recta del infinito. Demostrar [2] que si una
homografı́a del plano en sı́ mismo (aplicación biyectiva que que transforma puntos alineados en
puntos alineados), conserva la recta del infinito (afinidad) y además transforma cada punto de una
recta concreta en sı́ mismo (tiene una recta de puntos fijos) entonces, las rectas que unen cualquier
punto con su imagen por tal homografı́a son paralelas entre sı́.
Citar [1] algún ejemplo de transformación geométrica en el plano que sea de este tipo.
(Soluciones en las páginas siguientes)
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
6
SOLUCIÓN GEOMETRÍA I 28 de octubre del 2011:
1)
Sólo debemos determinar, para obtener la recta proyección ortogonal de la recta ` sobre el plano π,
el plano que contiene a ` y sea perpendicular al plano π.
Vectores paralelos a este plano son ~v = (3, 1, 1), que determina la dirección de recta `, y ~a = (1, 3, 1),
que da dirección perpendicular a π. Un punto de este plano es el punto (1, −1, 0) de la recta `, por lo
que su ecuación es:
(~v × ~a) · (x − 1, y + 1, z) = 0
⇒
2x + y − 5z − 1 = 0.
Luego las ecuaciones de la recta proyección son:
x + 3y + z − 4 = 0,
2x + y − 5z − 1 = 0
⇒
x−3
y
z−1
=
=
.
16
−7
5
2)
— Como el centro de un giro, que transforma una recta en otra, equidista de las dos rectas, dicho
centro ha de estar en una de las bisectrices de ambas rectas.
— Utilizando coordenadas, sean las ecuaciones de un giro son de la forma
x0 = ax + by + p
y 0 = −bx + ay + q
(a2 + b2 = 1).
La√imagen de un punto arbitrario P (t, 0) de la recta y = 0 es (at + p, −bt + q), que debe estar en la
recta 3x + y = 0; por lo que:
√
√
√
3(at + p) + (−bt + q) = 0 ⇒ ( 3a − b)t + 3p + q = 0.
Como esta última relación se debe verificar para todo t, se sigue que:
√
√
b = 3a, q = − 3p.
√
Como a2 + b2 = 1 se tiene que a = ±1/2, b = √
± 3/2 y, por tanto, las ecuaciones de los dos giros
genéricos que transforma la recta y = 0 en la recta 3x + y = 0, son de los tipos:
√
√
1
3
1
3
x0 = x +
x0 = − x −
y+p
y+p
2√ 2
2
√2
√
√
3
1
3
1
y0 = −
y0 =
x + y − 3p
x − y − 3p
2
2
2
2
El centro de cada uno de los giros es su punto fijo, que lo determinamos resolviendo cada uno de los
sistemas de ecuaciones lineales siguientes:
(
(
√
√
−x + 3y + 2p = 0
−3x − 3y + 2p = 0
√
√
√
√
− 3x − y − 2 3p = 0
3x − 3y − 2 3p = 0
Obteniéndose respectivamente los centros:
³
¶
µ
p
.
p, − √
3
√ ´
−p, − 3p ,
Al considerar todos los giros, sus centros recorren, respectivamente, las rectas:
√
√
3
y = 3x,
y=−
x,
3
7
rectas por el origen de pendientes 60◦ y 150◦ : bisectrices de las rectas dadas.
3)
— Si la recta de puntos fijos NO es la del infinito y si tomamos un sistema de coordenadas tal que
la recta de puntos fijos es x = 0, todo punto (t, 0) va en sı́ mismo. De la ecuación de una afinidad, que
transforma un punto X(x, y) en el punto X 0 (x0 , y 0 ):
x0 = ax + by + p,
y 0 = cx + dy + q,
(1)
se tiene que: t = at + p, 0 = ct + q ⇒ p = 0, q = 0, c = 0, a = 1.
Con lo que la afinidad queda de la forma:
x0 = x + by,
y 0 = dy.
−−→
Entonces, XX 0 = (x + by, dy) − (x, y) = y(b, d − 1) es un vector de dirección constante.
En el caso particular de b = 0 y d = −1, se trata de una simetrı́a axial.
En general es una homologı́a de eje y = 0 y centro el punto del infinito en la dirección del vector
(b, d − 1).
— Si la recta de puntos fijos es la del infinito, un punto de coordenadas homogéneas (0, 1, m) se
transforma en sı́ mismo. De las ecuaciones de una afinidad (1), se sigue que:
1 = a + bm,
m = d + cm.
Y como estas relaciones se han de verificar para todo m, se tiene:
a = 1,
b = 0,
d = 0,
c = 1.
Con lo que la afinidad queda de la forma:
x0 = x + p,
y 0 = y + q.
Se trata de una traslación y la recta que une un punto X con X 0 tiene la dirección del vector (p, q), de
la traslación.
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
8
GEOMETRÍA I 10 de noviembre del 2011
1. Obtener la ecuación de la hipérbola con ası́ntotas las rectas x = 1, x + y − 2 = 0, y tangente al eje
OX.
Sol.: 4x2 + 4xy − 12x − 4y + 9 = 0.
2. Deducir que x2 + 2xy + y 2 − 3x − 5y + 4 = 0 es la ecuación de la parábola que pasa por el punto
(0, 1), cuya tangente en el punto (1, 1) es la recta y = x y su eje es paralelo a la recta x + y = 0.
3. En el plano euclı́deo, la ecuación general de una cónica a11 x2 +a22 y 2 +2a12 xy+2a01 x+2a02 y+a00 =
0, representa una circunferencia si y sólo si a11 = a22 y a12 = 0.
Si tenemos dos circunferencias C1 y C2 , establecer que la combinación lineal C1 + λC2 constituye
un haz de circunferencias. Verificar que para λ = −a11 /b11 degenera en una recta (llamada eje
radical), que pasa por los puntos de intersección (reales o imaginarios) de C1 con C2 .
Dadas dos circunferencias de centros en (a1 , b1 ) y (a2 , b2 ), y radios r1 y r2 , respectivamente,
comprobar que la recta que pasa por los puntos de intersección de ambas tiene por ecuación:
2(a2 − a1 )x + 2(b2 − b1 )y + a21 − a22 + b21 − b22 + r22 − r12 = 0.
4. Determinar la ecuación de la hipérbola con centro (1, 0), que tiene a la recta y − x + 1 = 0 como
una ası́ntota y que pasa por los puntos (2, 2) y (0, 2).
Sol.: x2 − y 2 − 2x + 4 = 0.
5. Siendo x2 − y 2 − 2x + 4 = 0 la ecuación de la hipérbola del ejercicio (4), obtener la otra ası́ntota,
sus ejes y la ecuación de la hipérbola referida a los ejes.
6. Determinar el valor de λ para que t1 t2 + λp2 = 0 sea la ecuación de la cónica C ≡ x2 − 6xy + 2x +
2y − 1 = 0, donde t1 = 0 y t2 = 0 son las ecuaciones de las tangentes a C desde el punto P (1, 1) y
p = 0 es la ecuación de la polar de P respecto a C.
7. Determinar la ecuación de la cónica tangente a los ejes coordenados en los puntos (2, 0) y (0, 3) y
que pasa por el punto (1, −1).
Sol.: 9x2 + 37xy + 4y 2 − 36x − 24y + 36 = 0.
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
9
GEOMETRÍA I 17 de noviembre del 2011
1. Hallar las ecuaciones de la recta situada en el plano x − 3y − z + 4 = 0 y que es perpendicular a la
recta de ecuaciones x − 2z − 3 = 0, y − 2z = 0, en el punto en que ésta corta al plano.
2. Justificar que existen exactamente dos isometrı́as en el plano, una directa y otra inversa, que
transforman un segmento en otro. En el caso de que un segmento sea AB de extremos A(0, 0)
y B(0, 1) y su transformado sea A0 B 0 con A0 (1, 0) y B 0 (2, 0). ¿cuáles son las ecuaciones de tales
transformaciones? y especificar de qué isometrı́as se trata. Indicar cuáles son los elementos fijos
(puntos y rectas) de cada una, si los tienen.
3. Establecer las condiciones para que una afinidad sea una semejanza directa. Demostrar que una
semejanza directa es o bien una traslación o bien una homologı́a (homografı́a en al plano con un
punto doble y una recta de puntos dobles no incidentes).
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
10
GEOMETRÍA I 5 de diciembre del 2011
1.
Si tXAX + λ tXBX = 0 es la ecuación de un haz de cónicas determinado por dos cónicas de
matrices asociadas A y B, ¿cómo [0.5] se procede para obtener las cónicas degeneradas del haz?
En un haz de cónicas (no todas degeneradas) ¿cuál [0.5] es el número máximo de cónicas degeneradas
que pueden haber?
Si en un haz de cónicas los cuatro puntos base están dos confundidos y los otros dos son distintos
o bien están confundidos por pares, ¿cuántas [0.5] cónicas degeneradas posee?
Considérense en el plano real las cónicas
√
C1 : x2 + y 2 − 2xy − 2(x + y) + a = 0
C2 : x2 + y 2 + xy − 3 = 0.
y
Determinar [2.5] los valores de a para los cuales C1 y C2 tengan puntos comunes en los que las
tangentes a ambas coincidan.
4
2
2
-4
4
-2
-2
-4
Applet GeoGebra
2.
¿Qué [0.5] ángulo forma la tangente a una cónica en un vértice, con el eje que lo contiene?
Hallar [2] la ecuación de la hipérbola de vértices los puntos (1, 1) y (3, 3) y que pasa por (3/2, 0).
Determinar [0.5] centro, ejes y ası́ntotas.
Hipérbola: xy − 2x − 2y + 3 = 0.
3.
En el espacio ordinario considérense las rectas
r : y = 0, z = −1;
s : y = 0, z = 1.
Hallar [2] el lugar geométrico de las rectas de intersección de los pares de planos perpendiculares,
cada uno de los cuales contiene a una de las rectas anteriores. ¿De qué [1] se trata?
S.: y 2 + z 2 = 1.
(Soluciones en las página siguiente)
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
11
SOLUCIÓN GEOMETRÍA I 5 de diciembre del 2011:
1)
Para que el haz de cónicas
x2 + y 2 − 2xy −
√
2(x + y) + a + λ(x2 + y 2 + xy − 3) = 0
tenga exactamente dos cónicas degeneradas, la siguiente ecuación ha de tener una raı́z doble:
¯
¯
¯ a − 3λ − √1
¯
√1
−
¯
2
2 ¯
¡
¢
1
1
¯ − √1
¯
λ + 1 λ−2
¯
¯ = − (9λ3 − 3aλ2 + 36λ2 − 12aλ + 2λ + 8) = − (λ + 4) 9λ2 − 3aλ + 2 = 0.
2
2
¯
¯
4
4
λ−2
¯ − √1
¯
λ
+
1
2
2
Siendo las soluciones:
λ1 = −4,
λ2 =
´
p
1³
a − a2 − 8 ,
6
λ3 =
´
p
1³
a + a2 − 8 ,
6
habrá dos soluciones coincidentes si:
√
λ2 = λ3 ⇒ a = ±2 2
ó
λ1 = λ2 ⇒ a = −
73
.
6
No hay valores reales de a para los que λ1 = λ3 . Tampoco hay valores de a para los que λ1 = λ2 = λ3 ,
es decir, no es un haz osculatriz o hiperosculatriz.
2)
La hipérbola pedida pertenece al haz de cónicas bitangentes a las rectas perpendiculares a su eje en
sus vértices:
x+y−6=0
y
x + y − 2 = 0.
Tal haz de cónicas es:
(x + y − 6)(x + y − 2) + λ(y − x)2 = 0.
La cónica de este haz que pasa por (3/2, 0) se obtiene para λ = −1 y es la hipérbola equilátera:
xy − 2x − 2y + 3 = 0,
de centro en (2, 2), ejes x − y = 0, x + y − 4 = 0 y ası́ntotas x = 2, y = 2.
Para determinar la cónica en cuestión podemos proceder obteniendo cinco de sus puntos.
Como el centro es el punto medio de sus vértices (1, 1) y (3, 3), él es (2, 2). El simétrico de (3/2, 0)
respecto al centro es (5/2, 4), que pertenece a la cónica. Y el simétrico de (3/2, 0) respecto al eje que une
los vértices dados, x = y, es el punto (0, 3/2), que también es de la cónica. Tenemos ası́ cinco puntos de
la cónica: (1, 1), (3, 3), (3/2, 0), (5/2, 4) y (0, 3/2).
3)
Planos genéricos que pasan por las rectas r y s son:
y + λ(z + 1) = 0
y
y + µ(z − 1) = 0.
Pares de estos planos serán perpendiculares si el producto escalar de sus vectores directores es cero:
(0, 1, λ) · (0, 1, µ) = 1 + λµ = 0.
Luego, la ecuación del lugar geométrico pedido es:
¶µ
¶
µ
y
y
−
+1=0
−
z+1
z−1
⇔
y 2 + z 2 = 1.
Se trata de un cilindro elı́ptico (circular) de generatrices paralelas al el OX.
12
GEOMETRÍA I 13 de diciembre del 2011
(Ejercicios Cuarto Seguimiento)
1.
Justificar la siguiente construcción geométrica del baricentro G de los cinco puntos A, B, C, D y
E que se expresa en la siguiente figura, siendo L, M, N, P y Q los puntos medios de los segmentos
AB, BC, CD, DE y EA, respectivamente:
2.
Consideremos tres puntos A, B y C en el plano y sean D, E y F puntos en las rectas BC, CA
y AB, respectivamente. Si las tres rectas AD, BE y CF son concurrentes establecer que, para
segmentos orientados:
AP
AF
AE
=
+
.
PD
FB
EC
Sugerencia: Aplicar el teorema de Menelao a los triángulos ABD y ADC, cortados por las rectas CP y BP ,
respectivamente.
3.
Consideremos tres puntos A, B y C en el plano y sean D, E y F puntos en las rectas BC, CA
y AB, respectivamente. Si las tres rectas AD, BE y CF son concurrentes establecer que, para
segmentos orientados:
DP
EP
FP
+
+
= 1.
DA EB
FC
Sugerencia: Utilizar el Ejercicio 2 y aplicar el teorema de Ceva al triángulos P BC y al punto A.
13
4.
5.
En el plano afı́n se consideran las referencias cartesianas R = {O; ~u, ~v } y R0 = {O; ~u0 , ~v 0 }. Hallar
la condición necesaria y suficiente para que existan otros puntos distintos de O que tengan las
mismas coordenadas respecto de R y R0 . Hallar el lugar geométrico de estos puntos.
Consideremos el espacio afı́n real de dimensión 3.
(a) Si en un sistema de referencia R = {O; ~e1 , ~e2 , ~e3 } un plano tiene por ecuación x + y + z = 2,
¿cuál será su ecuación en la referencia R0 = {P ; ~u1 , ~u2 , ~u3 } cartesiana si P (1, 1, 0) y
~u1 = −~e1 + ~e3 ,
~u2 = −~e2 + ~e3 ,
~v3 = ~e1 + ~e2 + ~e3 .
(b) Encontrar una referencia R00 respecto a la cual el plano x − y + z = 3 tenga por ecuación y 00 = 0.
6.
Dadas las rectas en el plano afı́n real en una cierta referencia cartesiana que tiene por ecuaciones:
r1 : 3x − 2y + 3 = 0;
r2 : y = 4
r3 : 3x − y = 1,
encontrar un triángulo ABC tal que A esté en r1 , el punto (1, 0) esté en la recta BC y que sus
medianas sean las rectas dadas.
(3.6)
(2,5)
(1,4)
(5/3,4)
r2
(2,4)
y-4=0
(1,3)
(1,2)
3x - 2y + 3 = 0
r3
(1,0)
r1
3x - y - 1 = 0
7.
Sean los r puntos P1 , P2 , . . . , Pr en un espacio afı́n y G su baricentro.
(1) Probar que si Gi es el baricentro de los puntos P1 , P2 , . . . , Pi−1 , Pi+1 , . . . , Pr , entonces G es la
intersección de las rectas Pi Gi (i = 1, . . . , r).
(2) Probar que para cada i ∈ {1, 2, . . . , r}, se tiene el siguiente valor de la razón simple:
(Pi Gi G) =
r−1
.
r
Geometrı́a I. Angel Montesdeoca. La Laguna, 2011
14
GEOMETRÍA I 19 de enero del 2012
(Examen Final. Primera Convocatoria)
1. Establecer que no se cortan la rectas
½
`1 :
½
3x − y + z = 3
x − y − 2z = −2
`2 :
x + 2y = 1
2x − y + 2z = 2
Hallar la ecuación de la recta que pasa por el punto P (1, 0, 1) y que corta a `1 y a `2 . Hallar
también los puntos de intersección de esta recta con las rectas `1 y `2 .
2. Establecer que mediante una homotecia una recta y su imagen son paralelas.
Dado el triángulo ABC, con A(0, 0), B(12, 0) y C(9, 6), utilizar una adecuada homotecia de
centro en C, para construir un cuadrado DEF G inscrito en ABC, con DE en el lado AB y los
vértices F y G sobre BC y CA, respectivamente. ¿Cuáles son las coordenadas de D, E, F y G?
———————————–
3. Describir la posición de una recta y una cónica. Ecuación de la recta tangente a una cónica y
de las tangentes desde un punto a una cónica.
Dada la parábola 3y 2 + 2x = 0 averiguar la posición relativa de las rectas
`1 : x + 6y = 6,
`2 : 2x − 3y = −18,
`3 : x + y = 1.
con respecto a dicha parábola.
4. Encontrar la ecuación de la cónica tangente a las rectas x + y = 0, x = 1 en los puntos de
intersección con la recta x + y + 1 = 0 y que pasa por el punto (1/2, 1/2). Se trata de una hipérbola,
determinar sus ası́ntotas.
———————————–
−−→
−−→
5. Dados tres puntos A, B, C alineados en un espacio afı́n se tiene que AC = ρAB; al escalar ρ se
le denomina razón simple de los puntos A, B, C y ponemos ρ = (A B C).
Sean A, B, C, D cuatro puntos alineados, demostrar que:
(A B C) (A D B) (A C D) = 1.
(2)
Sean P1 , P2 , P3 tres puntos no alineados en el plano afı́n y ` una recta que no pasa por ninguno de
ellos. Sean Q1 , Q2 , Q3 los punto en que ` cortan a las rectas P2 P3 , P3 P1 y P1 P2 , respectivamente.
Demostrar el resultado siguiente, llamado Teorema de Menelao:
15
(Q3 P1 P2 ) (Q1 P2 P3 ) (Q2 P3 P1 ) = 1.
(Considerar el punto P de intersección de la recta paralela a ` por el punto P3 con la recta P1 P2 y aplicar el
Teorema de Tales para obtener (Q2 P3 P1 ) = (Q3 P P1 ) y (Q1 P2 P3 ) = (Q3 P2 P ); luego, aplicar (2).) :
6. Sea {O; ~e1 , ~e2 } un referencia cartesiana en el plano afı́n real y sean las rectas
r : x + y = 1,
s : x − y = 1.
Hallar una referencia cartesiana tal que las ecuaciones de r y s sean
r : y 0 = 0,
s : x0 = 0.
Dar las expresiones del cambio de coordenadas respecto a las dos referencias.
———————————–
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
16
GEOMETRÍA I 26 de enero del 2012
(Examen Final. Segunda Convocatoria)
1. Dados en el espacio ordinario un punto P y dos rectas no paralelas que no se cortan y que no
pasan por P , justificar que por P pasa una única recta que corta a las rectas dadas.
Encontrar la recta ` que para por el origen (0, 0, 0) de coordenadas que se apoya en las recta
`1 : x = 1, y = 1 y `2 : x = −1, z = 1.
2. ¿Qué tipo de transformaciones da la composición de giros? Justificar la respuesta.
Dados los puntos P (1, 0) y Q(0, 1) en plano, consideremos la composición del giro de centro P
y amplitud 90◦ con el giro de centro Q y amplitud 90◦ ; establecer que el resultado es una simetrı́a
central con respecto al centro de un cuadrado de lado P Q.
———————————–
3. Clasificar la cónica x2 −y 2 +2x+6y −13 = 0. Dar su ecuación reducida utilizando sus invariantes
métricos. Encontrar, si es el caso, su centro, sus ejes y sus ası́ntotas. Hacer una gráfica aproximada.
4. a) Determinar el lugar geométrico de los puntos de intersección de las rectas y = mx, (2m −
2)x + (5m + 1)y = 2m − 2, cuando m varı́a. ¿De qué se trata?
b) Hallar la ecuación de la cónica (coincide con el lugar geométrico del apartado anterior) que
pasa por el punto (3, 1), tangente a la recta y = x en el origen de coordenadas, y a la recta
−2x + y + 2 = 0 en el punto (1, 0).
———————————–
5. Dar definiciones equivalentes de espacio afı́n y establecer la equivalencia entre ellas.
Demostrar que el conjunto de las matrices simétricas de orden 2 × 2, con coeficientes reales es
un espacio afı́n asociado al espacio vectorial IR3 con la siguiente ley externa
µ
¶
µ
¶
a11 a12
a11 + 2x1 a12 + x2
1
2
3
+ (x , x , x ) =
.
a12 a22
a12 + x2
a22 + 3x3
6. En el plano afı́n real se dan tres puntos A, B, C no alineados. Se consideran los puntos Aα , Bα , Cα
tales que se tiene las siguientes expresiones para las razones simples:
(A B Cα ) = (A C Bα ) = (B C Aα ) = α.
−−→ −−→
¿Cuáles son las coordenadas de los puntos Aα , Bα y Cα en la referencia cartesiana {A; AB , AC }.
Demostrar que los baricentros de los triángulos Aα Bα Cα , cuando α varı́a, están en una recta
(paralela a AC por el baricentro de ABC)
———————————–
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
17
GEOMETRÍA I Junio-Julio del 2012
1. Entre las recta del espacio afı́n ordinario que pasan por el punto P (−2, 1, 1) y cortan a la recta
4x − y + z = 13, 2x − y − z = 1 determinar si existe una que pasa por el punto Q(2, 1, 3), dando en
caso afirmativo la ecuación de dicha recta.
2. Obtener las expresiones del cambio de coordenadas entre dos referencias cartesianas en un espacio
afı́n.
En el espacio afı́n real tridimensional se considera una referencia cartesiana R = {O; ~e1 , ~e2 , ~e3 }.
Sea R0 = {O0 ; ~v1 , ~v2 , ~v3 } una nueva referencia cartesiana con origen en el punto O0 (2, 3, 1), sus ejes
cortan a los ejes de R, respectivamente, en los puntos de coordenadas (3, 0, 0), (0, 2, 0), (0, 0, 4), de
modo que el punto P (1, 1, −5) tenga coordenadas (1, 1, 1) en R0 . Obtener los vectores ~v1 , ~v2 , ~v3 y
las ecuaciones del cambio de referencia.
3. Describir geométricamente, en el plano afı́n, la trasformación homotecia. ¿Cuáles son sus ecuaciones cuando el centro de homotecia no es el origen de coordenadas? ¿Es una homotecia la
composición de homotecias? ¿Es conmutativa la composición de homotecias?
¿Dónde está el punto P si su imagen mediante la homotecia η1 de centro O1 y razón k1 , coincide
con su imagen mediante la homotecia η2 de centro O2 y razón k2 (k1 6= k2 )?
4. En una cónica con centro, obtener la ecuación que permite determinar las pendientes de los ejes.
Hallar la ecuación de la hipérbola que pasa por el origen, tiene por ası́ntota la recta x−2y −1 = 0
y uno de sus ejes es la recta x − y − 1 = 0. (Sol.: 2x2 + 2y2 − 5xy − 4x + 5y = 0.)
Obtener su ecuación reducida en el plano euclı́deo.
Es necesario trabajar cada una de las preguntas.
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
18
GEOMETRÍA I 9 de Julio del 2012
1. Hallar [1] las ecuaciones de la recta paralela al plano π : x−y+z−3 = 0, corta la recta ` : x = 1, y = 3
y que pasa por A(1, 1, 1).
2. Obtener [1] las ecuaciones de la transformación T que resulta de componer la traslación de vector
~u = (3, 4) con la simetrı́a axial de eje de simetrı́a la recta 4x−3y = 1. ¿Cuáles son sus elementos fijos
[0.5] (puntos y rectas propios o impropios)? ¿Cuáles son las ecuaciones [0.5] de T si tomamos el eje
de simetrı́a como un nuevo eje de coordenadas?
3. ¿Qué es un diámetro [0.5] de una cónica? Dado un diámetro d, sea d0 el diámetro que pasa por el
polo de d (se dice que d y d0 son diámetros conjugados), ¿Obtener [1] la relación que existe entre
las pendientes de d y d0 ? A partir de la esta relación, deducir [0.5] qué condición deben verificar las
pendientes de los ejes de una cónica con centro. ¿Es válida la condición anterior para una parábola?
¿Por qué [0.5]?
4. Ecuación de la parábola [1] que pasa por los puntos de coordenadas (1, 0), (0, 0), (5, 3) y de eje
paralelo a la recta de ecuación x + y = 1. Obtener [1] su eje de simetrı́a.
5. Definir [0.5] coordenadas baricéntricas en un espacio afı́n y establecer [0.5] su relación con las coordenadas cartesianas. Sean A = (1, 1, 1), B = (1, 2, 3), C = (2, 3, 1) y D = (3, 1, 2) las coordenadas
de cuatro puntos en el espacio ordinario, respecto a una referencia cartesiana R = {O, ~e1 , ~e2 , ~e3 }.
Demostrar [0.5] que < = {A, B, C, D} es una referencia baricéntrica. Hallar [1] las coordenadas
baricéntricas de O respecto a <.
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
19
GEOMETRÍA I 21 de Septiembre del 2012
1. Hallar las ecuaciones de la recta que es paralela al plano π : x − y + z − 3 = 0, que corta la recta
` : x = 1, y = 3 y que pasa por A(1, 1, 1).
Resp.: x = 1, y = z.
2. ¿Es posible trazar un plano paralelo al plano de ecuación 2x − y + z = 2, por los puntos A(1, 1, −1)
y B(0, 3, 2)? ¿Y uno perpendicular? Cuando sea posible obtener su ecuación.
Resp.: No es posible trazar un plano paralelo. Plano perpendicular: −5x − 7y + 3z + 15 = 0.
3. Posición relativa del eje OX y del plano que pasa por la recta ` : x − y + 1 = 0, 2x − z = 0 y que
contiene al punto P (2, 0, 2).
Resp.: Se cortan en el punto (1/2, 0, 0).
4. Ecuación de un plano genérico paralelo a las rectas `1 : 6x = 3y − 3 = 2z − 4, `2 : x = y + 1 = z + 1.
De los planos obtenidos, encontrar el que equidista de ambas rectas.
Resp.: 2x − 4y + 2z = 1.
5. Encontrar la recta paralela al plano x + y = 0, contenida en el plano x + y + z = 1 y que pasa por
el punto (1, 0, 0).
Resp.: x + y = 1, z = 0.
y−1
z−3
=
. Hallar otra recta s que se apoye en
2
3
`1 y `2 y además sea paralela a la recta r : x = y = z.
6. Dadas las rectas `1 : x = y, z = 0 y `2 : x =
Resp.: x + 1 = y + 1 = z.
x+1
y−1
=
= z. Calcular la ecuación del plano
2
−2
que pasa por el origen O(0, 0, 0) y es perpendicular a la recta que pasa por O y corta a las rectas
7. Dadas las rectas `1 : x − 1 = 2y = 3z y `2 :
`1 y `2 .
Resp.: 3x − 3y − 2z = 0.
8. Sean el punto P (1, 1, 0) y el plano π : 4x − y − z = 1. Calcular las coordenadas del punto P 0
simétrico de P , respecto a π.
Resp.: (1/9, 11/9, 2/9).
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
20
GEOMETRÍA I 11 de octubre del 2012
(Segundo seguimiento)
1. Se considera la transformación σ en el plano que resulta de componer el giro de centro en el punto
A(1, 0) y amplitud 60◦ , con la homotecia de centro en el origen de coordenadas O(0, 0) y razón 2.
Clasificar la transformación σ. Expresarla como composición de una homotecia con un giro, ambos
con el mismo centro. Y expresarla como composición de un giro con una homotecia, ambos con el
mismo centro. Determinar la transformada `0 la recta ` : x = 1, mediante la transformación σ?
¿Puedes decir cuál es el valor del ángulo α que forman las recta ` y `0 , sin determinar ésta?
2. Se considera la transformación σ en el plano que resulta de componer la homotecia de centro en el
origen de coordenadas (0, 0) y razón 2 con el giro de centro en el punto A(1, 0) y amplitud 60◦ .
Clasificar la transformación σ. Expresarla como composición de una homotecia con un giro, ambos
con el mismo centro. Y expresarla como composición de un giro con una homotecia, ambos con el
mismo centro. Determinar la transformada `0 la recta ` : x = 1/2, mediante la transformación σ?
¿Puedes decir cuál es el valor del ángulo α que forman las recta ` y `0 , sin determinar ésta?.
Respuestas:
Giro de centro A(1, 0) y amplitud 60◦ ,G(A,60◦ ) :
√
x−1
3y
−
+ 1,
x0 =
2
2
y0 =
1√
y
3(x − 1) + .
2
2
Homotecia de centro O(0, 0) y razón 2, H(O,2) : x0 = 2x, y 0 = 2y.
√
√
√
Semejanza directa σ1 = H(O,2) ◦ G(A,60◦ ) : x0 = x − 3y + 1, y 0 = 3x + y − 3.
√
√
√
1
3
0
0
Semejanza directa σ2 = G(A,60◦ ) ◦ H(O,2) : x = x − 3y + , y = 3x + y −
.
2
µ
¶2
1
Centro de la semejanza σ1 (punto fijo propio): C1 1, √ .
3 ¶
µ
1 1
Centro de la semejanza σ2 (punto fijo propio): C2
, √ .
2 2 3
σ1 = H(C1 ,2) ◦ G(C1 ,60◦ ) = G(C1 ,60◦ ) ◦ H(C1 ,2) . σ2 = H(C2 ,2) ◦ G(C2 ,60◦ ) = G(C2 ,60◦ ) ◦ H(C2 ,2) .
´
√
√ ´
1³
1³ √
x − 3y + 2 , y 0 =
3 3x + 3y − 2 3 .
2
6
´
³
√ ´
√
1
1³ √
G(C2 ,60◦ ) : x0 =
x − 3y + 1 , y 0 =
3 3x + 3y − 3 .
2
6
³
´
√
√ ´
1³
1
1
H(C1 ,2) : x0 = 2x − 1, y 0 =
6y − 3 . H(C2 ,2) : x0 = (4x − 1), y 0 =
12y − 3 .
3
2
6
√
`1 : x = 1 7−→ σ1 (`1 ) : x + 3y
√ − 2 = 0.
`2 : x = 1/2 7−→ σ2 (`2 ) : x + 3y − 1 = 0.
G(C1 ,60◦ ) :
x0 =
Las trasformadas de una recta ` por las semejanzas σ1 y σ2 son rectas tales que `,\
σ1 (`) = `,\
σ2 (`) = 60◦ .
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
21
GEOMETRÍA I 19 de octubre del 2012
1. Obtener la recta que corta a la recta r : x − 2y + z = 0, x + y + z = 0 y que pasa por el punto
P (1, −2, 3), formando con ella un ángulo de 60◦ .
2. Ecuación del plano que pasando por el origen de coordenadas sea paralelo a las rectas:
½
y+1
x−1
x=3
=
= z,
y =z+1
2
2
3. Sean `1 y `2 dos rectas en el plano que forman un ángulo α (medido desde `1 a `2 , en sentido
contrario a las agujas del reloj, p.ej. α = 15◦ ). Dado un punto X, sea X1 el punto que resulta
de hallar el simétrico de X respecto a `1 y luego el simétrico de éste respecto a `2 ; por otra parte,
sea X2 el punto que resulta de hallar el simétrico de X respecto a `2 y luego el simétrico de éste
respecto a `1 . ¿Coinciden los puntos X1 y X2 ? Si no coinciden X1 con X2 , ¿cómo se puede obtener
X2 a partir de X1 , con un sólo movimiento?
4. Una afinidad que tiene una recta fija ` y un par de puntos P y Q fijos, no pertenecientes a `, tiene
una recta de puntos fijos. Si tomamos las rectas ` y P Q como ejes coordenados, ¿cuáles son las
ecuaciones de la afinidad?
5. Ecuaciones de la semejanza directa que transforma los puntos A(0, 0) y B(1, 2) en A0 (15, −1) y
B 0 (−7, 5) respectivamente. Expresarla como la composición de un giro con una homotecia, ambos
con el mismo centro.
6. Hallar la ecuaciones del giro de centro B(1, −1) y ángulo π/4 y de la homotecia de centro B(1, 1)
√
y razón − 2. Determinar las ecuaciones de la semejanza que resulta de componer el giro con la
homotecia anteriores. Encontrar el punto que puede tomarse como centro común de un giro y una
homotecia, que compuesto en cualquier orden, den lugar a la semejanza obtenida anteriormente.
Ecuaciones de estas últimas transformaciones.
(Soluciones en la página siguiente)
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
22
1) El vector director de la recta r es (1, −2, 1) × (1, 1, 1) = (−3, 0, 3) || ~v = (−1, 0, 1). Un punto
genérico de la recta r es de la forma Q(t, 0, −t).
−−→
El vector P Q = (t − 1, 2, −t − 3) ha de formar con el vector ~v un ángulo de 60◦ :
−−→
−−→
~v · P Q = ||~v || ||P Q || cos 60◦ .
√ p
−2 − 2t = 2 (−t − 3)2 + (t − 1)2 + 4 (1/2).
Elevando al cuadrado los dos miembros de esta ecuación:
3(−1 + 2t + t2 ) = 0 =⇒ t = −1 ±
√
2.
Luego, las ecuaciones paramétricas de las rectas que cumple las condiciones pedidas son:
³
³
√ ´
√ ´
x = −2 ∓ 2 λ + 1,
y = 2λ − 2,
z = −2 ± 2 λ + 3.
2) El plano pedido es paralelo a los vectores directores de las rectas dadas: ~u = (2, 2, 1) y ~v = (0, 1, 1).
Luego, un vector perpendicular al plano pedido es ~a = ~u × ~v = (1, −2, 2): ası́, su ecuación, al pasar por
(0, 0, 0), es x − 2y + 2z = 0.
3) Tomemos la recta `1 como eje de abscisas y la recta `2 por el origen de coordenadas y formando
un ángulo α con con `1 , medido en sentido contrario a las agujas del reloj.
La composición de la simetrı́a axial s1 , respecto a `1 , con la simetrı́a axial s2 , respecto a `2 , es un giro
g(O,2α) de centro el en origen de coordenadas y amplitud 2α.
La composición de la simetrı́a axial s2 , respecto a `2 , con la simetrı́a axial s1 , respecto a `1 , es un giro
g(O,2(π−α)) de centro el en origen de coordenadas y amplitud 2(π − α), pues el ángulo que forma la recta
`2 con `1 , medido en el sentido contrario de las agujas del reloj es π − α.
Dado un punto X en el plano, sean:
X1 = (s2 ◦ s1 )(X) = g(O,2α) (X),
X2 = (s1 ◦ s2 )(X) = g(O,2(π−α)) (X).
Luego, g(O,−2α) (X1 ) = X y g(O,2(π−α)) (g(O,−2α) (X1 )) = X2 , esto es:
X1 7−→ X2 = g(O,2(π−α)−2α) (X1 ) = g(O,−4α) (X1 ).
Es decir, la transformación que lleva X1 en X3 es un giro de centro en el punto de intersección de
las rectas `1 y `2 y amplitud −4α, siendo α el ángulo que forma la recta `1 con `2 medido en el sentido
contrario de las agujas del reloj.
A este mismo resultado podemos llegar haciendo los cálculos partiendo de las ecuaciones de simetrı́a
axial, respecto a una recta x cos α + y sen α − p = 0, siendo p la distancia de la recta al origen de
coordenadas y α el ángulo que forma la normal a la recta con el eje de abscisas:
x0 = −x cos 2α − y sen 2α + 2p cos α
y 0 = −x sen 2α + y cos 2α + 2p sen α,
Las simetrı́as respecto a `1 : y = 0 y a `2 : y = (tag α)x ó x cos(α − π/2) + y sen(α − π/2) = 0, son
respectivamente:
³π
´
³π
´
½ 0
x0 = −x cos 2
+ α − y sen 2
+α
x =x
2
³π
´
³ π2
´
s1 :
s2 :
0
y = −y
y 0 = −x sen 2
+ α + y cos 2
+α .
2
2
Por tanto, las ecuaciones de la transformación producto s2 ◦ s1 son:
½ 0
x = x cos 2α − y sen 2α
s2 ◦ s1 :
y 0 = x sen 2α + y cos 2α,
23
que representan las ecuaciones de un giro g(O,2α) , de centro el origen y amplitud 2α.
Y las ecuaciones de la transformación producto s1 ◦ s2 las podemos obtener paso a paso como sigue:
³
³π
´
³π
´
³π
´
³π
´´
s2
s1
(x, y) 7→
−x cos 2
+ α − y sen 2
+ α , −x sen 2
+ α + y cos 2
+ α 7→
2´
2´´
³
³π 2 ´
³π 2 ´
³π
³π
−x cos 2
+ α − y sen 2
+ α , x sen 2
+ α − y cos 2
+α =
2
2
2
2
(x cos 2α + y sen 2α, −x sen 2α + y cos 2α) .
Con lo que las ecuaciones de s1 ◦ s2 son:
½ 0
x = x cos(−2α) − y sen(−2α)
◦
s1 s2 :
y 0 = x sen(−2α) + y cos(−2α),
Que representan las ecuaciones de un giro g(O,−2α) , de centro el origen y amplitud −2α.
En consecuencia, teniendo en cuenta que el inverso de un giro es un giro con el mismo centro y
amplitud opuesta y que la composición de giros con el mismo centro es un giro de amplitud la suma de
amplitudes y mismo centro, resulta que:
³
´
¡
¢
−1
−1
◦
◦
◦
◦
X2 = (s1 s2 ) (s2 s2 )
(X1 ) = g(O,−2α) g(O,2α) (X1 ) = g(O,−4α) (X1 ).
4) El punto de intersección de las rectas P Q y `, que denotamos por O, se trasforma en un punto O0
que ha de estar en la recta `, al ser ésta fija. Además, como los puntos P y Q son fijos, la recta P Q es
fija, luego el punto O0 ha de estar también en la recta P Q. En consecuencia, O0 = P Q ∩ `, es decir, O es
fijo y la recta P Q es de puntos fijos.
Tomando como O como origen de coordenadas, la recta ` como eje abscisas y P Q como eje de
ordenadas y teniendo en cuenta que esta afinidad O(0, 0) 7→ O(0, 0), P (0, p) 7→ P (0, p) y A(u, 0) 7→
A0 (v, 0) (u 6= v), resulta fácilmente que:
x0 = ax,
y = y.
24
GEOMETRÍA I 9 de noviembre del 2012
Todas las respuestas han de ser justificadas
1. Dada una cónica de matriz asociada A y rango(A) = 2. ¿Puede ocurrir que la cónica carezca de
puntos? ¿Puede tener cualquier recta que se considere un sólo punto común con la cónica?
a) NO. Pues posee al menos un punto, que es el punto singular solución del sistema homogéneo:
fx0 ≡ a00 x0 + a01 x1 + a02 x2 = 0
fx1 ≡ a01 x0 + a11 x1 + a12 x2 = 0
fx2 ≡ a02 x0 + a12 x1 + a22 x2 = 0
b) NO.
Hagamos una demostración por reducción al absurdo.
Sabemos que: “Si P es un punto singular y el punto Q es otro punto cualquiera de la cónica, la recta determinada
por ellos está enteramente contenida en la cónica”. En efecto, los tres coeficientes de la ecuación que determinan
los puntos comunes con la recta P Q:
λ2 tQAQ + 2λ tP AQ + tP AP = 0,
son en este caso nulos.
Ası́, si Q es el único punto común de la cónica con una recta `, la cónica NO posee puntos fuera de la recta P Q;
pues, si existiera otro punto R, la recta P R forma parte de la cónica. Y existirá otro punto (` ∩ P R) común de
la cónica con la recta `.
Por tanto, la cónica se reduce a la recta P Q (doble) y tendrı́a rango 1, en contradicción con las hipótesis.
2. ¿Tienen puntos singulares la cónicas imaginarias?
Las únicas cónicas con puntos singulares son las degeneradas; además, las cónicas imaginarias son de género
elipse. Luego, debe tratarse del producto de rectas imaginarias (un punto).
3. Si una cónica tiene tres puntos comunes con una recta dada, ¿qué cónica puede ser?
Proposición 4.9.- Una recta y una cónica pueden tener comunes dos puntos, uno sólo o ninguno, o la recta
forma parte de la cónica.
En consecuencia, la recta pertenece a la cónica y la cónica es el producto de rectas.
4. ¿En una cónica, pueden ser paralelas las polares de tres puntos no alineados?
NO.
Proposición 4.11.- Las polares de los puntos de una recta pasan por el polo de esta recta.
Es decir, las polares de puntos alineados son concurrentes. O equivalentemente, los polos de rectas concurrentes
están alineados.
Ası́, si las rectas son paralelas (un punto impropio común) sus polos están alineados.
5. En una elipse, se toma dos diámetros conjugados como ejes de coordenadas. Respecto a este sistema
de coordenadas, ¿su ecuación puede ser de la forma ax2 + by 2 − 2cx + d = 0, con c > 0?
NO, debe ocurrir que c = 0
Diámetros conjugados son dos rectas que pasan por el centro de la cónica, tales que el polo de cada uno de ellas
está en la otra.
Si se toman dos diámetros como ejes coordenados, ha de ocurrir que el polo del eje OX, y = 0, ha de ser el
punto del infinito (0 : 0 : 1) del eje OY ; y que el polo del eje OY , x = 0, ha de ser el punto del infinito (0 : 1 : 0)
del eje OX.
Imponiendo estas condiciones a la ecuación general de una cónica, queda de la forma:
a11 x2 + a22 y 2 + a00 = 0.
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
25
GEOMETRÍA I 30 de noviembre del 2012
Segundo Parcial
1. Definir [1] una cónica como un lugar geométrico en términos de uno de sus focos y de la directriz
correspondiente. Establecer [2] que la polar de un foco es la directriz correspondiente. (Podrı́a tomarse
el foco como origen de coordenadas y como directriz una recta paralela a uno de los ejes, y utilizar la definición pedida
para encontrar la ecuación de la cónica).
2. Determinar [2] la ecuación del haz de cónicas del cual se sabe que:
— La cónica no degenerada de ecuación 2x + y 2 = 0 pertenece al haz.
— Todas las cónicas del haz son tangentes en el mismo punto a la recta ` de ecuación 2x+2y−1 = 0.
— Todas las cónicas, salvo las degeneradas, son parábolas que intersecan con la recta del infinito
en un punto común.
Hallar la cónica de haz que pasa [1] por P (1, 0) y la no degenerada que es tangente [1] a x−2y+1 = 0.
3. Dadas las rectas r : y = 0, z = 1 y s : z + 1 = 0, x + y + 1 = 0, una recta ` se mueve cortando a los
dos dadas en los punto P y Q, de tal modo que el segmento P Q se ve desde el origen de coordenadas
\
bajo una ángulo recto, es decir el ángulo P
OQ es de 90◦ . Hallar [2] la superficie engendrada por la
recta móvil `. ¿De qué [1] se trata?
En la página siguiente aparecen una sugerencia a las soluciones.
26
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
27
1) Una cónica es el lugar geométrico de los puntos del plano cuyo cociente de distancias a un punto
fijo (foco) y a una recta fija (directriz) es constante.
Si el punto fijo (foco) es el origen de coordenadas O(0, 0) y la recta fija es x = a, se de debe verificar
que para un punto genérico de la cónica P (x, y)
p
x2 + y 2
=e
(cte.)
|x − a|
Por lo que la ecuación de la cónica es x2 + y 2 − e2 (x − a)2 = 0. La polar del foco O(0, 0) es la recta
x = a, directriz correspondiente:
ae2
−e2
0
1
ae2
−e2 1 − e2 0 0 = −e2 .
0
0
0
1
0
Obsérvese que la cónica es elipse si 0 < e < 1, parábola si e = 1 e hipérbola si e > 1.
———————————
2) (Tomado de: http://personal.us.es/meneses/rela11-12.pdf, Ejercicio 91.)
En el ”blog” del Departamento de Algebra de La Universidad de Sevilla, puedes encontrar una demostración de que
”La dimensión de los reales como espacio vectorial racional es infinita”:
http://blogs.algebra.us.es/blog/la-dimension-de-los-reales-como-espacio-vectorial-racional-es-infinita/
A parte de la cónica no degenerada dada, 2x + y 2 = 0, otra cónica del haz que se pide es la formada
por el producto de la recta tangente dada, 2x + 2y − 1 = 0, y la recta del infinito que es tangente a todas
las parábolas del haz en un mismo punto; luego, el haz lo podemos escribir de la forma:
2x + y 2 + λ(2x + 2y − 1) = 0,
y 2 + 2(1 + λ)x + 2λy − λ = 0,
que son todas parábolas, que solo degeneran para λ = 1, en la recta doble y = 1.
Construcción con GeoGebra
La parábola del haz que pasa por P (1, 0) se obtiene para λ = −2; siendo su ecuación:
y 2 − 2x − 4y + 2 = 0.
28
Para encontrar la parábola tangente a la recta x − 2y + 1 = 0, ésta debe tener con la cónica un sólo
punto común, por lo que al sustituir en la ecuación del haz la variable ”x”, despejada de la ecuación de
la recta, se obtiene la ecuación de segundo grado en ”y”:
y 2 + 8(λ + 4)y − λ − 1 = 0,
que debe tener una única solución. Para lo que ha de verificarse que:
(3λ + 2)2 + 3λ + 2 = 0,
o sea
λ = −1 ó λ = −2/3.
La cónica del haz que se obtiene para λ = −1 es la recta doble (y − 1)2 = 0, y para λ = −2/3 se tiene
la parábola:
3y 2 + 2x − 4y + 2 = 0.
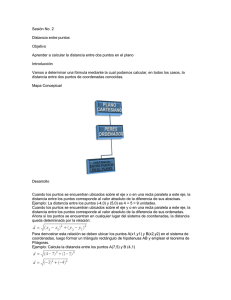
Otra forma de expresar el haz de parábolas:
Como se trata de un haz de cónicas bitangente, también podemos formar el haz de cónicas tomado
como cónicas base la parábola dada, 2x + y 2 = 0, y la recta (tomada dos veces) que une los puntos de
tangencia de todas las cónicas del haz: la paralela a OX (eje de la parábola) por (−1/2, 1), punto de
tangencia de la recta ` : 2x + 2y − 1 = 0 y la parábola dada. Quedando la ecuación del haz de la forma:
2x + y 2 + µ(y − 1)2 = 0.
———————————
3) Un punto genérico de la recta r : y = 0, z = 1 es P (t, 0, 1) y el plano que pasa por el origen y
perpendicular a OP , tx + z = 0, corta la recta s : z + 1 = 0, x + y + 1 = 0 en:
µ
¶
1 t+1
Q
,−
, −1 .
t
t
Un punto genérico de la recta ` es:
(x, y, z) =
µ
µ
t+
¶
¶
1
(t + 1)λ
− t λ, −
, 1 − 2λ .
t
t
Eliminando t y λ entre estas ecuaciones se obtiene la cuádrica:
−2y 2 − 2xy + 2zy + xz − 2y − x + z − 1 = 0,
se trata de un hiperboloide
−2
−1
−2
1
0
−2
1
reglado o de una hoja:
−1 −2 1
Rango A= 4
0 −2 1
|A|= 4
−2 −4 2
Ptos. Hiperb.
1
2 0
−2 1
−4 2
Rango (A00 )= 3
2 0
Elipsoide
Hiperboloide
Paraboloide
Elipsoide
Hiperboloide
A la ecuación del hiperboloide también podemos llegar tomando un punto P (t, 0, 1) en la recta r y el
−−→ −−→
punto Q(u, −1 − u, −1) en la recta s e imponer que OP · OQ = 0; o sea que, tu − 1 = 0.
Eliminado t, u, λ, entre tu − 1 = 0 y las ecuaciones de la recta variable `:
x = t + (u − t)λ,
y = (−u − 1)λ,
z = 1 − 2λ,
se obtiene la cuádrica con determinate de la matriz asociada igual 4 > 0 (sus puntos son hiperbólicos) y
la cónica del infinito es no degenerada; por tanto, se trata de un hiperboloide de una hoja.
−2y 2 − 2xy + 2zy + xz − 2y − x + z − 1 = 0,
Geometrı́a I. Angel Montesdeoca. La Laguna, 2012
29
GEOMETRÍA I 9 de enero del 2013
Primera Convocatoria
1a) Calcular [6] el punto simétrico del punto P (2, 0, 1) respecto de la recta r : x + 2y = 6, z = 2. Resp.:
(18/5, 16/5, 3).
1b) Una colineación u homografı́a en el plano real, ampliado con los puntos del infinito, es una aplicación biyectiva que transforma puntos alineados en puntos alineados. Respecto a un sistema de
coordenadas homogéneas, deducido de un sistema de coordenadas cartesianas en el plano, escribir
[1] las ecuaciones de una homografı́a.
Una afinidad es una homografı́a que conserva la recta del infinito. Probar [6] que una afinidad
que transforma una recta en otra paralela a ella es una homotecia.
Si k1 y k2 (k1 k2 6= 1) son las razones de dos homotecias, establecer [6] que el producto de dos
homotecias de centros distintos, C1 y C2 , es una homotecia de centro C alineado con los centros de
−−→
−−−→
ambas y razón el producto de las razones. Obtener [?] que −
C1 C = (1 − k2 )/(1 − k1 k2 )C1 C2 .
2a) Dada una cónica C no degenerada, sean P y p un punto y su recta polar respecto a la cónica.
¿Puede ocurrir [3], que según sea el tipo de la cónica no degenerada C, exista otro punto P 0 cuya
polar sea la recta p? Dado un punto Q sobre la recta p, ¿su polar q contiene [3] al punto P ?
Justificar las respuestas.
2b) Consideremos la familia F de cónicas que pasan por los puntos A(1, 0), B(2, 0) y C(0, 1) y son
tangentes en este último al eje OY . Determinar [5] (2x2 − 4y 2 − 3x + 4y = 0), clasificar [1] y hallar
(si es posible) su centro [1], ejes [2] y ası́ntotas [2] del lugar geométrico de los centros de las cónicas
de la familia F. ¿Qué cónica [4] de la familia F es la que tiene por polar del punto D(0, 2) la recta
x + y = 1? (2x2 + 4y 2 + 7xy − 6x − 8y + 4 = 0).
—————————————
3a) En el plano afı́n ordinario sean los puntos P (1, 2), A(3, 1), B(2, 3) y C(1, 0) respecto a una referencia
−−→
−−→
canónica R0 . En la referencia R = {P ; ~u = P A , ~v = P B } un punto E tiene por coordenadas (2, 2);
−−→
−−→
encontrar [4] las coordenadas, respecto a R0 , del punto D tal que R0 = {P ; ~u0 = P C , ~v 0 = P D }
sea una referencia, respecto a la cual el punto E también tenga las coordenadas (2, 2); y comprobar
−−→ −−→
[2] que AC y BD son paralelos.
Si ahora E es un punto arbitrario del plano, no situado sobre la recta AP , que tiene las mismas coordenadas
respecto a R y R0 , deducir [?] que D está en la paralela a AC por B.
3b) Dados tres puntos A, B y C se considera una poligonal BCa A0 Ba C (en forma de ”M”) con cuatro
segmentos de la misma longitud, `a , cuyo primer segmento BCa queda sobre la recta BA, el punto
A0 esta sobre BC y el último segmento queda sobre la recta AC. De forma similar se construyen
sendas ”M”, CAb B 0 Cb A y ABc C 0 Ac B con `b = CAb = Ab B 0 = B 0 Cb = Cb A y `c = ABc = Bc C 0 =
C 0 Ac = Ac B.
Demostrar [4] que las rectas AA0 , BB 0 y CC 0 son concurrentes (puede aplicarse el teorema de
Ceva).
30
¿Sabrı́as encontrar [?] las coordenadas baricéntricas de P en la referencia {A, B, C}?
Geometrı́a I. Angel Montesdeoca. La Laguna, 2013
31
GEOMETRÍA I 21 de enero del 2013
Segunda convocatoria
1a. Sea la recta r : x + y + 1 = 0, 2x − z + 3 = 0. Para cada punto P de r, determinar [6] la ecuación
de la recta que pasa por P y corta perpendicularmente al eje OZ.
1b. ¿Cuándo [2] una afinidad (aplicación biyectiva del plano ampliado en sı́ mismo que transforma
puntos alineados en puntos alineados y lleva rectas paralelas en rectas paralelas) es una semejanza?
Obtener [3] las ecuaciones de la semejanza, a partir de las de una afinidad.
Ecuación [4] de la semejanza directa que aplica el punto de coordenadas (0, 0) en (15, −1) y
(1, 0) en (9, 7). Determinar [1] su centro y razón de semejanza. Expresar [2] esta semejanza como
producto de un giro por una homotecia ambos con el mismo centro.
2a. Un punto (real o imaginario) de intersección de dos cónicas es [1] común a todas las cónicas del
haz que ellas dos determinan. Por un punto no básico de un haz de cónicas pasa [1] una y solo una
cónica del haz. Un haz de cónicas contiene [2] siempre una cónica degenerada (producto de rectas).
2b. Hipérbolas [5] con una ası́ntota la recta y = x y la otra variable paralela al eje OY , y que son
tangentes a la recta t : y = 2. Ecuación [2] del diámetro de cada hipérbola que pasa por el punto de
contacto T con la tangente t. Si T 0 es el punto de contacto de cada hipérbola con la otra tangente
horizontal (distinta de t), ¿cuál [3] es el lugar geométrico que describen los puntos T 0 ?
—————————————
3a. Un subconjunto F de un espacio afı́n A asociado a un espacio vectorial E es una variedad lineal si
−−→
{P Q ∈ E /P, Q ∈ F } es un subespacio vectorial de E. Dar [1] otra definición de variedad lineal y
establecer [3] la equivalencia entre las dos.
3b. Sea F el subespacio vectorial de IR4 generado por los vectores {~u = (1, 0, 1, 0), ~v = (−1, 1, 1, 2),
w
~ = (0, 1, 2, 2)}. Obtener unas ecuaciones paramétricas [2] y unas ecuaciones cartesianas [2] o
implı́citas de la variedad lineal F que pasa por el punto P (1, 0, 0, 2) y de subespacio director F .
Geometrı́a I. Angel Montesdeoca. La Laguna, 2013
32