ES 2 532 523 A1 - Universidad Politécnica de Madrid
Anuncio

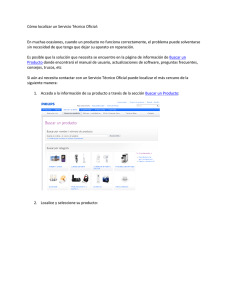
OFICINA ESPAÑOLA DE PATENTES Y MARCAS 19 ESPAÑA Número de publicación: 21 Número de solicitud: 201431446 51 Int. CI.: A61B 6/12 A61B 18/20 A61B 17/34 A61B 10/00 Fecha de presentación: 71 01.10.2014 43 (2006.01) (2006.01) (2006.01) (2006.01) SOLICITUD DE PATENTE 12 22 2 532 523 11 UNIVERSIDAD POLITÉCNICA DE MADRID (100.0%) Ramiro de Maeztu, Nº 7 28040 Madrid ES Fecha de publicación de la solicitud: 27.03.2015 Solicitantes: 72 Inventor/es: GARCÍA CENA, Cecilia Elisabet; AL-HADITHI, Basil Mohammed y MARTÍN GONZÁLEZ, Antonio 74 Agente/Representante: CARVAJAL Y URQUIJO, Isabel ES 2 532 523 A1 54 Título: Mecanismo electromecánico localizador de lesiones no palpables en mamografías 57 Resumen: Mecanismo electromecánico localizador de lesiones no palpables en mamografías. El mecanismo incluye un puntero señalador láser (1) desplazable linealmente sobre la correspondiente región a estudio de la mama de la paciente, deteniéndose en un punto correspondiente a unas coordenadas (x,y) previamente determinadas, en función del punto exacto de la lesión a localizar, de manera que una vez localizada la lesión en el plano, el mecanismo o dispositivo volverá a la posición (0’0). Básicamente el mecanismo comprende una base (2) con dos guías lineales (3) y un puente (4) desplazable sobre esas guías y portador de otra guía y del puntero señalador láser (1), de manera que mediante dos servomotores (16) y (17) podrán realizarse los desplazamientos en cualquier sentido, controlados por una unidad de control (14), conectada a una estación de visualización (11) de imagen digital, que con una pantalla (12) y el correspondiente PC (13) recibirán las coordenadas exactas mediante una aplicación informática. La imagen que muestra la lesión es proporcionada por un mamógrafo digital (6). A1 ES 2 532 523 A1 P201431446 01-10-2014 MECANISMO ELECTROMECÁNICO LOCALIZADOR DE LESIONES NO PALPABLES EN MAMOGRAFÍAS DESCRIPCIÓN 5 OBJETO DE LA INVENCIÓN La presente invención se refiere a un mecanismo localizador de lesiones no palpables en 10 mamografía. El objeto de la invención es establecer una correlación de una lesión obtenida mediante una imagen digital de una mamografía con la propia región a examinar, mediante un mecanismo capaz de desplazarse a un punto previamente determinado de interés, de forma automática, el marcaje de dicho punto se realizará con un indicador señalador; una vez localizado el punto se realizará el procedimiento radiológico correspondiente y el 15 mecanismo volverá a la posición de partida, a la posición (0,0). El efecto final de la invención está desarrollado para servir como instrumento de posicionamiento. ANTECEDENTES DE LA INVENCIÓN 20 En tareas de mecanismos localizadores de este tipo para aplicaciones médicas existen diversos dispositivos, unos de utilización directa y otros constituidos por dos componentes. La evolución de patentes de mecanismos constituidos por dos componentes es la siguiente: 25 La primera patente registrada de un mecanismo posicionador y plato de compresión fenestrado data de marzo de 1981, la cual es registrada con número de patente conjunta US4259585. La segunda de Junio de 1994 para el posicionador con número US005320111A, y para el plato de compresión de junio de 2003, con número 30 US6507748B2, y una patente posterior también de plato de compresión de Diciembre de 2013 con numero US8611491B2. Con respecto a los dispositivos de utilización directa la primera patente registrada data de septiembre de 1987, con número de patente 2 ES 2 532 523 A1 P201431446 01-10-2014 US4691333, compresor de multiorificios adaptable al sistema de obtención de imagen mediante rejilla y cincho y la segunda de Julio de 1990, plato de compresión con multiorificios adaptable a cuerpo de mamógrafo, con número de patente US4943986. Posteriormente en 2010 se han desarrollado compresores de multirejilla radiotransparente 5 en disposición de raqueta de tenis. La patente US4259585 presenta un mecanismo localizador constituido por dos componentes. El localizador propiamente dicho, ubicado a la salida del haz de rayos X mediante un anclaje mecánico, consta de un sistema de corredera con dos grados de 10 libertad pudiéndose mover en el plano (x,y). Mediante su accionamiento manual, la corredera desplaza desde sus extremos, dos varillas metálicas coincidentes 90º, que bajo la luz del colimador del propio mamógrafo, nos marcan en forma de ejes coordenados el punto sobre la lesión a señalar. Este punto queda proyectado a través de la ventana del compresor fenestrado. En dicho compresor están grabados caracteres alfanuméricos sobre 15 el borde de la ventana del mismo para facilitar la localización. Este dispositivo ha sido utilizado para aplicaciones en mamografía analógica convencional, hasta a aparición de los mamógrafos digitales directos. Las patentes US005320111A y US006507748B2 describen un mecanismo localizador 20 también constituido por dos componentes, localizador y compresor fenestrado con caracteres alfanuméricos, ubicado igualmente a la salida del haz de rayos X, mediante un anclaje mecánico, consta de un sistema de engranajes planos, para desplazar en ambos ejes coordenados una cabeza portadora de un dispositivo laser, dicho dispositivo es alimentado desde el propio mecanismo. El accionamiento del mecanismo para su 25 desplazamiento a través del plano (x,y) se realiza de forma manual al igual que el accionamiento del laser, el cual una vez posicionado en el punto que nos interesa, este queda proyectado a través de la ventana del compresor fenestrado. Este tipo de mecanismo algo más sofisticado que el anterior, está adaptado para mamógrafos digitales es utilizado actualmente pero dadas sus características no interactúa con las aplicaciones que nos 30 brindan los equipos de mamografía digital. La patente US4691333 describe un dispositivo de utilización directa, su característica principal es que a la hora de realizar la técnica radiológica de localización, solo necesitamos 3 ES 2 532 523 A1 P201431446 01-10-2014 un componente, se trata de una rejilla multiperforadora radiopaca, adaptable a un sistema porta-chasis utilizados en su día en mamógrafos analógicos, en los que el procesado de la imagen se obtenía por procedimientos químicos y más recientemente mediante tecnología digital CR (Computer Radiography), la paciente era colocada sobre la rejilla multiperforadora 5 y a su vez sobre el porta-chasis, a través de los orificios de dicho compresor se localiza el punto de interés, pudiendo de esta forma realizar el procedimiento radiológico de localización de la lesión. La patente US4943986 describe otro dispositivo de utilización directa con compresor de 10 multiorificios, mejorado, y su ubicación es sobre el cuerpo del mamógrafo como el resto de compresores. La localización de la lesión se realiza de forma análoga al anterior, haciendo coincidir la lesión entre alguno de los orificios del mismo, este puede ser utilizado tanto en mamógrafos analógicos como en digitales, la desventaja de este tipo de dispositivos está en la dificultad en hacer coincidir la lesión entre un agujero y no entre el vano del mismo y 15 sobre todo cuando el abordaje es por vía posterior, el procedimiento de localización resulta laborioso. DESCRIPCIÓN DE LA INVENCIÓN 20 El mecanismo electromecánico localizador, de dos grados de libertad de lesiones no palpables en una mamografía de la invención está previsto para ser utilizado en un mamógrafo digital. Dicho mecanismo se colocaría a la salida del haz de rayos del equipo mediante un anclaje mecánico de fácil montaje-desmontaje ya que sólo lo utilizaremos para señalizar la lesión. El mecanismo se podrá adaptar a cualquier mamógrafo a través de la 25 ranura de una visera de protección, situada a ambos lados de la ventana del colimador, o mediante un adaptador sobre la misma. El mecanismo está constituido por una base, sobre la cual irán fijadas dos guías lineales de precisión para aplicaciones médicas, sobre su cara lateral y de un puente en él que irá 30 fijada otra guía de similares características portadora del indicador señalador, ambas se desplazarán de forma automática en cualquier dirección del plano, mediante el accionamiento de dos servomotores de corriente continua, controlados por una unidad de 4 ES 2 532 523 A1 P201431446 01-10-2014 control esta se conectará a una estación de visualización de imagen digital, a un ordenador desde donde se enviarán las coordenadas exactas, por lo que esto se realizaría a través de una aplicación informática. Los componentes de accionamiento, los servomotores, se ubicaran en el propio mecanismo, la unidad de control y la alimentación en las proximidades 5 del mismo, ambos adoptaran un especial diagrama general de conexión. El mecanismo electromecánico localizador, va acompañado para la realización del procedimiento radiológico de un plato de compresión fenestrado, como el descrito anteriormente, no objeto de la invención ya que puede utilizarse cualquiera de los existentes 10 ya patentados, con la salvedad que deberá colocarse sobre el borde externo de la ventana del mismo, una marca indicará que el punto para la calibración del mecanismo electromecánico localizador. La calibración del localizador consistirá en desplazar el puntero localizador a la posición (0,0) del plato de compresión fenestrado. 15 Un aspecto a tener en cuenta con respecto a la calibración, es el grado de compresión de la mama, ya que esta es variable según las características de la misma, por lo que una vez que la mama está comprimida, el objeto en este caso la ventana del plato de compresión fenestrado se amplía en la razón FD/FO, (FD distancia foco detector) y (FO distancia foco objeto), desplazando a (+X ó –X) y a (+Y ó –Y) el punto de inicio (0,0) del localizador en la 20 imagen, con respecto al (0,0) de la mama de la paciente. Esto tiene su importancia en la propia calibración y por tanto en la precisión del mecanismo a la hora de localizar la lesión en la imagen y su correlación con la propia región a examinar. El accionamiento automático de este mecanismo, en la localización del punto de la lesión 25 que nos interesa presenta una serie de ventajas con respecto a sus predecesores. Una de ellas es que el posicionamiento de las coordenadas del punto de la lesión, se realiza desde la aplicación en la estación de visualización y no desde el lado del paciente, se puede elegir o modificar la posición de dicho punto de forma rápida y una vez decidido, enviar la orden al localizador. Podrá ser guardado en la aplicación en el fichero de la paciente y estar 30 disponible para verlo en el momento que se desee, no siendo necesario retirar el mecanismo hasta la finalización del procedimiento, gracias a su diseño. La principal aplicación de este mecanismo sirve de ayuda en los siguientes procedimientos 5 ES 2 532 523 A1 P201431446 01-10-2014 radiológicos: Localización Prequirúrgica para Biopsia de lesión no palpable con sistema aguja-arpón y plato de compresión fenestrado; con el mecanismo localizador, se determinarán las coordenadas del punto elegido por el radiólogo dónde se colocará el arpón en el punto de la lesión. Otra aplicación será la localización de lesiones no palpables, para 5 su marcaje mediante clip marcador previo a tratamiento posterior. En la localización y marcaje de la radiografía de la pieza quirúrgica secundaria a la cirugía de las lesiones incluidas en la misma mediante una aguja para facilitar su identificación por el patólogo en el estudio macroscópico. En piezas quirúrgicas a lo largo del estudio anatomopatológico, en el caso de que el patólogo no identifique la lesión en el estudio macro y/o microscópico, 10 mediante la localización y marcado de la lesión mediante una aguja. En este caso las piezas son radiografiadas tras su fijación en formol. Dada la dificultad de la localización de la lesión/ lesiones, en este caso, con el mecanismo localizador se realizaría de inmediato. Otra aplicación destinada para este dispositivo, es la localización de lesiones en la imagen 15 de la mamografía y su correlación con la propia región a examinar que nos servirán como ayuda para realizar la localización de dichas lesiones en otros equipos estereotáxicos para la realización de biopsias por procedimientos estereotáxicos, ya que se puede realizar la mamografía y marcar sobre la paciente el punto exacto que interese una vez determinado con el localizador, facilitando de esta forma la localización de lesiones de interés en los 20 casos más complejos. El localizador descrito está diseñado para su utilización en mamógrafos digitales y sirve como instrumento de posicionamiento, haciendo corresponder la correlación entre una lesión obtenida en mamografía y la propia mama de la paciente, de forma precisa, mediante 25 la interconexión de los elementos correspondientes a una aplicación informática, a una unidad de control, a un actuador lineal y a dos servo-motores de corriente continua. El mecanismo electromecánico localizador puede ser montado en cualquier mamógrafo 30 digital, sobre la ranura de la visera de protección o mediante un pequeño adaptador sobre la base del mismo. Dada las características del diseño preliminar (dimensiones, tamaño, características físicas) se trata de un mecanismo sencillo, de fácil montaje/desmontaje y de sencilla calibración. 6 ES 2 532 523 A1 P201431446 01-10-2014 DESCRIPCIÓN DE LOS DIBUJOS Para complementar la descripción que seguidamente se va a realizar y con objeto de ayudar 5 a una mejor comprensión de las características del invento, de acuerdo con un ejemplo preferente de realización práctica del mismo, se acompaña como parte integrante de dicha descripción, un juego de dibujos en donde con carácter ilustrativo y no limitativo, se ha representado lo siguiente: 10 Figura-1. Muestra una vista en perspectiva del mecanismo electromecánico localizador, en el que se muestra la salida del haz de rayos X, y todos los componentes del mecanismo. Figura-2 Muestra una vista en perspectiva de la ubicación del mecanismo electromecánico 15 localizador, sobre un mamógrafo digital genérico, con sus elementos principales ensamblados. Figura-3 Muestra una vista explosionada de los componentes del mecanismo. 20 Figura-4. Muestra una vista en perspectiva del mecanismo electromecánico localizador y del plato de compresión fenestrado. Figura-5. Muestra el diagrama general de conexión del mecanismo electromecánico localizador, los componentes que lo integran y la interrelación entre ellos. 25 Figura-6. Muestra el diagrama de flujo de la aplicación informática instalada en la estación de visualización, donde partimos de un archivo en el que se encuentra la misma. Figura-7. Muestra la estación de visualización, una vez dentro de la aplicación de 30 localización. Figura-8. Muestra la aplicación de localización, en la que podemos ver el punto de calibración (14) impreso sobre la mamografía en las dos proyecciones igualmente. 7 ES 2 532 523 A1 P201431446 01-10-2014 Figura-9. Muestra una mama comprimida apoyada sobre un detector de un mamógrafo con un plato de compresión fenestrado. 5 Figura-10. Muestra un diagrama de flujo de interconexión de la aplicación, donde interviene el mecanismo localizador, con otros equipos estereotáxicos. Figura-11. Muestra el aspecto de un servomotor de corriente continua. 10 Figura-12. Muestra el aspecto de la unidad de control. REALIZACIÓN PREFERENTE DE LA INVENCIÓN En base a las figuras comentadas se va a realizar una descripción de la forma de 15 realización preferente del mecanismo electrónico localizador, que según la figura 1, comprende una base (2) del conjunto del mecanismo, en la que están establecidas dos guías lineales a ambos lados, es decir en cada uno de los laterales longitudinales, correspondiendo dichas guías a la referencia (3) de esa figura 1. 20 Sobre esas guías lineales (3) se mueven, según un desplazamiento lineal en el eje X, un puente (4) con su guía lineal correspondiente (5), y sobre cuyo puente (4) va asimismo montado el puntero señalador láser (1), sirviendo éste para marcar el punto de la lesión que interese. 25 En la figura 2 se muestra el mecanismo electromecánico localizador sobre un mamógrafo digital genérico (6), con sus elementos principales ensamblados. Sobre dicho cuerpo del mamógrafo digital (6) se dispone un plato de compresión fenestrado (7), el cual es desplazable en sentido ascendente/descendente a lo largo de dicho mamógrafo (6). 30 Sobre la ranura de la visera de protección (8), a la salida del haz de rayos X (9), se coloca el mecanismo electromecánico localizador para realizar el procedimiento radiológico. 8 ES 2 532 523 A1 P201431446 01-10-2014 En la figura 3 se muestran en explosión los distintos componentes de cada mecanismo, las guías lineales y longitudinales (3), con las oportunas guías (3’) en esas guías longitudinales (3), el puente (4) así como la guía (5) y el puntero señalador láser (1). 5 En la figura 4 se muestra una vista en perspectiva del mismo mecanismo electromecánico localizador con los componentes ya descritos, así, como el plato de compresión fenestrado (7) mostrado en la figura 2, correspondiendo el punto (10) el correspondiente al punto de calibración del mecanismo con respecto al plato de compresión fenestrado (7), permitiendo 10 así obtener el punto de partida a la hora de hacer la correlación de la lesión vista en la imagen, con el punto exacto donde se encuentra en la mama a estudiar, de manera que el punto de calibración (10) comentado, estará ubicado en el borde superior derecho de la ventana (11) correspondiente al plato de compresión fenestrado (7), tal y como a parece en esa figura 4. 15 En la figura 5 se muestra el diagrama general de conexión del mecanismo electromecánico localizador que se está describiendo, con los componentes que lo integren y la interrelación entre ellos, incluyendo lo que puede considerarse una estación de visualización (11), con monitor (12) y PC (13) viéndose la unidad de control (14), el actuador de lineal (15), 20 alimentado a través de tensión de control de corriente alterna (16) y mostrando igualmente los bloques correspondientes a los servomotores (16) y (17), todo ello relacionado con el considerado mecanismo electromecánico localizador representado, en esta figura 5, por el bloque (18). 25 Es decir, para poner en funcionamiento el mecanismo localizador descrito y de forma automática, se hará a partir de la estación de visualización (11) comentada con la aplicación informática instalada y responsable de llevar el localizador al punto deseado, siendo la unidad de control (14) la responsable del accionamiento de los servomotores (16) y (17), que permitirán desplazamiento de las guías (3), y como última finalidad llevar el puntero 30 señalador (1) al punto deseado. Lógicamente el conjunto referido tendrá una tensión de alimentación controlada por la unidad de control (14) y por la propia aplicación. 9 ES 2 532 523 A1 P201431446 01-10-2014 En la figura 6 se muestra un diagrama de flujo de la aplicación informática instalada en la estación de visualización (11), partiendo de un archivo (19) en el que se encuentra esa estación de visualización (11). Previamente se habrá colocado el mecanismo en el 5 mamógrafo, sobre la correspondiente ranura de la visera de protección (8) mostrada en la figura 2. En esta figura 6, puede verse el bloque correspondiente a la aplicación (20), el bloque correspondiente a la calibración (21), el bloque (22) correspondiente al puntero en posición 10 (0’0) el bloque de sincronización (23) del mecanismo, el bloque de información (24) al localizador, así como el bloque de localización de la lesión (25) y el bloque correspondiente al comienzo del examen (26). De esta manera, una vez colocado el mecanismo en el mamógrafo según lo dicho con 15 anterioridad, se continua con la calibración del localizador, consistente en desplazar el puntero localizador a la posición (0’0) del plato de compresión (7), siendo esta información enviada al localizador vía WIFI, comenzado a continuación el examen y realizándose la localización guiada de la lesión, mediante una rejilla que corresponde al bloque (27) de esa figura 6, rejilla (27) que está grabada en la aplicación, enviándose al localizador la posición 20 deseada, a través del bloque (28), continuándose con los procedimientos radiológicos, según el bloque (29), desplazándose con la última mamografía (30) para que el localizador quede fuera del campo de radiación, según el bloque (31), finalizando, mediante el bloque (32), lo que es el procedimiento realizado. 25 En la figura 7 se muestra la estación de visualización que había sido referenciada con (11) en la figura 5, una vez dentro de la aplicación de localización, viéndose en el fondo de la pantalla, la rejilla de localización (32) que corresponden lógicamente al bloque (27) correspondiente al diagrama de la figura 6. Sobre esa rejilla de localización (32) se realizará la mamografía de la mama (33), comprimida con el plato de compresión fenestrado (7). 30 En la figura 7 comentada, se ha querido representar la lesión (33) quedando dentro del mismo, en las dos proyecciones distintas CC (cráneo-caudal) y ML (medio-lateral) de la mamografía, de manera que haciendo un clic con el ratón sobre la lesión (33), se fijaran las 10 ES 2 532 523 A1 P201431446 01-10-2014 coordenadas de dicha lesión sobre la imagen digital de la mama (33), para poder ser enviada al mecanismo localizador y determinar el punto exacto al que corresponde en la mama (33) de la paciente. 5 En la figura 8 se muestra la aplicación de localización, en la que se puede ver el punto de calibración (34) impreso sobre la mamografía, en las dos proyecciones igualmente. En la figura 9, se muestra una mama (35) comprimida, apoyada sobre un detector (36) de un mamógrafo digital, con el plato de compresión fenestrado (7). En esta figura se puede 10 ver el punto focal F, la distancia entre F y D entre dicho punto focal F y el detector, y la distancia FO entre el punto focal F y el objeto, así como el punto de inicio (0’0) del localizador. La ventana (11) del plato de compresión fenestrado (7), se amplia en la razón FD/FO, 15 factor importante en la calibración y en la precisión del mecanismo a la hora de localizar la lesión. En la figura 10 se muestra el diagrama de flujo de interconexión de la aplicación, donde termina el mecanismo de flujo localizador con los equipos estereotáxicos, de manera que la 20 localización y el marcado de una lesión, con el mecanismo localizador, facilitará la tarea a la hora de realizar otros procedimientos radiológicos como biopsias por estereotáxia en los caso más complejos. En este diagrama de bloques de la figura 10 se muestra el bloque, el equipo de estereotáxia 25 (39), el monitor (12) con el PC (13) ya referidos en la figura 6, la estación de estereotáxia (40) la estación (41) del mamógrafo, el bloque de información (42), el localizador de lesión (43) y el correspondiente marcador (44), y el servomotor de corriente continua y la unidad de control que corresponden a las referencias (17) y (14) respectivamente de la figura 5. 30 11 ES 2 532 523 A1 P201431446 01-10-2014 REIVINDICACIONES 1ª.- Mecanismo electromecánico localizador de lesiones no palpables en mamografías, previsto para su utilización en mamógrafos digitales para servir como instrumento de 5 posicionamiento y para hacer corresponder la correlación entre una lesión obtenida en una mamografía y la propia mama de la paciente, se caracteriza porque incluye una aplicación informática (20), una unidad de control (14), un actuador lineal y unos servomotores (16) y (17) de corriente continua, comprendiendo estructuralmente una base (2), con guías laterales y longitudinales (3) para desplazamiento en ambos sentidos, de un puente (4) con 10 una guía (5) y un puntero señalador láser (1), con la particularidad de que dichas guías longitudinales (3), son de precisión y van fijadas sobre la base (2) y sobre el propio puente (4), formando un conjunto para facilitar el desplazamiento del puntero señalador láser (1), tanto en el eje X como en el eje Y. 15 2ª.- Mecanismo electromecánico localizador de lesiones no palpables en mamografías, según reivindicación 1ª, caracterizado porque el conjunto que constituye el mecanismo electromecánico localizador propiamente dicho, va montado sobre un mamógrafo digital genérico (6), dotado de un plato de compresión fenestrado (7), desplazable en sentido ascendente y descendente, sobre la ranura de la visera de protección (8) a la salida del 20 haz del Rayos X (9). 3ª.- Mecanismo electromecánico localizador de lesiones no palpables en mamografías, según reivindicaciones anteriores, caracterizado porque el puntero señalador (1) se 25 posiciona sobre el plato de compresión fenestrado (7). 4ª.- Mecanismo electromecánico localizador de lesiones no palpables en mamografías, según reivindicaciones anteriores, caracterizado porque la aplicación informática (20) incluye medios de sincronización tanto el mecanismo en su conjunto, como de la calibración 30 y preparación del mismo para comenzar el examen o procedimiento radiológico correspondiente. 12 ES 2 532 523 A1 13 P201431446 01-10-2014 ES 2 532 523 A1 14 P201431446 01-10-2014 ES 2 532 523 A1 15 P201431446 01-10-2014 ES 2 532 523 A1 16 P201431446 01-10-2014 ES 2 532 523 A1 17 P201431446 01-10-2014 ES 2 532 523 A1 18 P201431446 01-10-2014 OFICINA ESPAÑOLA DE PATENTES Y MARCAS 21 N.º solicitud: 201431446 ESPAÑA 22 Fecha de presentación de la solicitud: 01.10.2014 32 Fecha de prioridad: INFORME SOBRE EL ESTADO DE LA TECNICA Ver Hoja Adicional 51 Int. Cl. : DOCUMENTOS RELEVANTES Categoría 56 Documentos citados Reivindicaciones afectadas X US 5320111 A (LIVINGSTON TROY W) 14.06.1994, todo el documento. 1-4 X WO 0044281 A1 (ULTRATOUCH CORP et al.) 03.08.2000, descripción; figuras. 1-4 X US 4259585 A (NOVAK ROBERT et al.) 31.03.1981, todo el documento. 1-3 A US 2009299218 A1 (HOLLER WOLFGANG et al.) 03.12.2009, descripción; figuras. 1-4 A JP H0880295 A (TOSHIBA CORP) 26.03.1996, BASE DE DATOS PAJ en EPOQUE, resumen; figuras. 1-4 A Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica 4 O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado para todas las reivindicaciones Fecha de realización del informe 20.03.2015 para las reivindicaciones nº: Examinador M. P. López Sabater Página 1/4 INFORME DEL ESTADO DE LA TÉCNICA Nº de solicitud: 201431446 CLASIFICACIÓN OBJETO DE LA SOLICITUD A61B6/12 (2006.01) A61B18/20 (2006.01) A61B17/34 (2006.01) A61B10/00 (2006.01) Documentación mínima buscada (sistema de clasificación seguido de los símbolos de clasificación) A61B Bases de datos electrónicas consultadas durante la búsqueda (nombre de la base de datos y, si es posible, términos de búsqueda utilizados) INVENES, EPODOC Informe del Estado de la Técnica Página 2/4 OPINIÓN ESCRITA Nº de solicitud: 201431446 Fecha de Realización de la Opinión Escrita: 20.03.2015 Declaración Novedad (Art. 6.1 LP 11/1986) Reivindicaciones Reivindicaciones 1-4 SI NO Actividad inventiva (Art. 8.1 LP11/1986) Reivindicaciones Reivindicaciones 1-4 SI NO Se considera que la solicitud cumple con el requisito de aplicación industrial. Este requisito fue evaluado durante la fase de examen formal y técnico de la solicitud (Artículo 31.2 Ley 11/1986). Base de la Opinión.La presente opinión se ha realizado sobre la base de la solicitud de patente tal y como se publica. Informe del Estado de la Técnica Página 3/4 OPINIÓN ESCRITA Nº de solicitud: 201431446 1. Documentos considerados.A continuación se relacionan los documentos pertenecientes al estado de la técnica tomados en consideración para la realización de esta opinión. Documento D01 Número Publicación o Identificación US 5320111 A (LIVINGSTON TROY W) Fecha Publicación 14.06.1994 2. Declaración motivada según los artículos 29.6 y 29.7 del Reglamento de ejecución de la Ley 11/1986, de 20 de marzo, de Patentes sobre la novedad y la actividad inventiva; citas y explicaciones en apoyo de esta declaración Reivindicación 1: El documento del estado de la técnica anterior considerado más cercano a esta reivindicación independiente es D01. En este documento se divulga un mecanismo electromecánico localizador de lesiones no palpables en mamografías, previsto para su utilización en mamógrafos digitales, que sirve como instrumento de posicionamiento y para hacer corresponder la correlación entre una lesión obtenida en una mamografía y la propia mama de la paciente. El mecanismo incluye una aplicación informática y una unidad de control (descripción, columna 16, líneas 51 a 55), un actuador lineal y unos servomotores. Además, está formado por una base (30a), con guías laterales y longitudinales (48, 50) para desplazamiento en ambos sentidos. Consta asimismo de un puente (30) con una guía (32) y un puntero señalador láser (46). El puente y las guías forman un conjunto para facilitar el desplazamiento del puntero señalador láser (46) tanto en el eje X como en el eje Y. A la vista de lo anterior, D01 anula la novedad de esta primera reivindicación según el artículo 6 de la Ley de Patentes 11/86. Reivindicación 2: El mecanismo electromecánico localizador de lesiones en mamografías descrito en D01 va montado en un mamógrafo genérico, como puede leerse en la descripción de este documento, columna 7, líneas 35 a 38. Dicho mamógrafo cuenta con un plato de compresión fenestrado desplazable en sentido ascendente y descendente. (Figura 2 y descripción de D01, columna 8, líneas 7 a 10) Por lo tanto, esta reivindicación dependiente tampoco es nueva. Reivindicación 3: Según se ilustra en la figura 5 de D01, el puntero señalador del aparato que describe también va montado sobre el plato de compresión fenestrado. Así pues, D01 también anula la novedad de esta reivindicación dependiente 3. Reivindicación 4: En la descripción de D01, columna 5, líneas 52 a 60, se explica el método de calibración del aparato. También son interesantes a este respecto las líneas 51 a 55 de la columna 16 del documento y las líneas 12 a 16 de su columna 3. Según puede verse, D01 también anula la novedad de esta última reivindicación dependiente. Informe del Estado de la Técnica Página 4/4