CAPITULO 2 ADQUISICION DE DATOS
Anuncio

Universidad Veracruzana
Facultad de Ingeniería en Electrónica y Comunicaciones
“Circuitos electrónicos para propósito de control y monitoreo de temperatura vía PC ”
Tesis
Que para aprobar la Experiencia Recepcional
Presenta:
Dzul May Yarely Sac Nic Teh
Olmedo Garcia Mario
PozaRica., Ver.
2007
INDICE
CAPITULO 1 INTRODUCCION
1.1 Introducción……………………………………………………………………………..1
1.2 Justificación……………………………………………………………………………...1
1.3 Objetivo………………………………………………………………………………….2
1.4 Alcance…………………………………………………………………………………..2
CAPITULO 2 ADQUISICION DE DATOS
2.1 DATOS…………………………………………………………………………………3
2.1.1 Datos Analógicos……………………………………………………………...3
2.1.2 Datos Digitales…...…..……………………………………………………….5
2.2 Puerto serial……………………………………………………………………………..6
2.3 Puerto paralelo……………………………………………………………. …………..11
2.4 Diferencia entre el puerto serial y el puerto paralelo………………………………. …17
2.5 La UART…………………………………………………………………………... ….18
2.5.1 Detección del tipo de UART…………………………………………………20
2.5.2 Comprobación de la UART…………………………………………………..21
2.6 Puerto USB……………………………………………………………………………..22
2.6.1 Estándares del USB……………………………………………………… ….23
2.6.2 Topología……………………………………………………………………..24
2.6.3 Funcionamiento del USB………………………………………………... ….26
2.6.4 Cables y conectores…………………………………………………………..27
2.7 Modos de transmisión………………………………………………………………….29
2.7.1 Transmisión asíncrona…………………………………………………… ….29
2.7.2 Transmisión síncrona……………………………………………………..….31
2.8 Control de los datos…………………………………………………………………....33
CAPITULO 3 CONVERTIDORES ADC Y DAC
3.1 La digitalización…………………………………………………………………… ….35
3.1.1Ventajas de la señal digital……………………………………………………35
3.1.2 Desventajas de la señal digital………………………………………………..36
3.2 Convertidor analógico a digital………………………………………………………...36
3.2.1Características básicas de un convertidor A/D……………………………….36
3.2.2 Procesos que intervienen en la conversión analógico a digital………………38
3.2.3 Errores en los convertidores analógicos/digital………………………………46
3.2.4 Etapa de acondicionamiento de la señal…………………………………...…47
3.3 Tipos de convertidores A/D…………………………………………………………....49
3.3.1Convertidor de aproximaciones sucesiva s…………………………………...49
3.3.2 Convertidor flash……………………………………………………………..51
3.3.3 Convertidor A/D con comparadores…………………………………….. …..51
3.3.4 Convertidor A/D con contadores……………………………………………..52
3.3.5 Convertidor A/D con integrador……………………………………………...53
3.3.6 ADC de doble pendiente.…..………………………………………………...53
3.3.7 ADC de voltaje a frecuencia……………….. ..………………………………54
3.4 El ADC 0804……………………………………………………………………..…….55
3.4. 1 Aplicaciones y características generales del ADC 0804…………………….56
3.4.2 Configuración del ADC 0804………………………………………………..57
3.4.3 Diagrama a bloques del ADC0804…………………………………………..60
3.5 Convertidor digital /analógico. ………………………………………………………...61
3.5.1 Clasificación de los convertidores digital/ analógico...……………….……...61
3.5.2 Convertidores seriales……………………………………………………..…62
3.5.3 Convertidores paralelo……………………………………………………….63
3.5.4 Aplicaciones de un DAC…………………………………………………….64
3.5.5 Características de funcionamiento de un DAC………………………………64
3.5.6 Código de entrada BCD para el DAC………………………………………..69
3.5.7 Parámetros para los convertidores DAC……………………………………..70
3.6 Tipos de convertidores D/A…………………………………………………………....73
3.7 El DAC 0808…………………………………………………………………………...79
3.7.1 Estructura interna del DAC 0808…………………………………………….82
3.7.2 Características generales del DAC 0808…………………………………..…83
CAPITULO 4 SENSORES DE TEMPERATURA
4.1 Introducción....................................................................................................................84
4.2 Instrumentos usuales para medición de la temperatura…..……………………………85
4.2.1 Termómetro de vidrio………………………………………………………...87
4.2.2 Termómetros bimetalitos……………………………………………………..88
4.2.3 Termopares…………………………………………………………………...89
4.2.4 Termoresistencia……………………………………………………………..92
4.2.5 Pirómetro de radiación……………………………………………………….95
4.2.6 Termocuplas………………………………………………………………….98
4.2.7 Termistores…………………………………………………………………..99
4.2.8 LM35.……………………………………………………………………….101
4.2.9 Sensor de temperatura a resistencia de carbono…………………………….102
CAPITULO 5 IMPLEMENTACIÓN DEL SISTEMA DE CONTROL DE
TEMPERATURA
5.1 Objetivo del circuito sensor de temperatura…………………………………………..105
5.2 Dispositivos electrónicos utilizados…………………………………………………..105
5.2.1 LM35………………………………………………………………………..105
5.2.2 ADC0804……………………………………………………………………106
5.2.3 PIC16f84A………………………………………………………………..…107
5.2.4 MAX232…………………………………………………………………….108
5.3 Códigos fuente para el sensor de temperatura………………………………………...109
5.3.1 Código fuente en lenguaje ensamblador para programar el PIC 16F84A….109
5.3.2 Código fuente en delphi para crear la interfase entre el sensor y la PC…….112
5.4 Diagrama eléctrico del sensor de temperatura monitoreado vía PC………………….115
CONCLUSIONES......................…………….…………………………………………...116
GLOSARIO…………………………………………………….……………………..….117
BIBLIOGRAFIA…………………………………………………………………………118
Capitulo 1
INTRODUCCION
1.1 INTRODUCCION
En la actualidad la mayoría de
los procesos utilizados en la industria están
controlados y monitoreados por una computadora para una mayor eficacia y rapidez en la
producción. Dicho control y monitoreo se realizan mediante varios circuitos integrados
activos y pasivos que hacen de las señales analógicas y digitales un proceso complejo para
un fin determinado. La señal controlada mediante estos circuitos pueden ser monitoreados
mediante display’s, pantallas LCD o PC’s.
En este caso especifico que es el control y monitoreo de la temperatura vía PC, se
utilizaran circuitos convertidores analógico/digital para convertir el valor de la temperatura
en un formato digital; también se utilizara el PIC16F84A que será el encargado de procesar
la señal digital para su visualización en la PC; y el circuito integrado MAX232 que es el
encargado de solucionar los problemas de niveles de voltaje cuando se envían señales
digitales hacia el puerto serial. El MAX232 se usa en aquellas aplicaciones donde no se
dispones de fuentes dobles de +12V.
1.2 JUSTIFICACIÓN
Uno de los campos de la ingeniería que se ha visto beneficiado con la introducción
de los microprocesadores y las PC’s es el área de la instrumentación y control, donde el
gran potencial de las computadoras y su relativa facilidad de programación permite diseñar
circuitos y sistemas para el control de los procesos en la industria. La evolución de las
PC’s ha sido muy rápida, quizás se pueda considerar que su evolución ha sido exponencial
mas que lineal en los últimos años, el procesamiento de datos ha venido ha ser la
integración por parte de varios sistemas, involucrando la transferencia de información en
forma de datos hacia y desde las PC’s vía dispositivos de entrada/salida. Hoy en día la
tecnología y el procesamiento de señales es con frecuencia acompañado de la utilización de
métodos de conversión digital, y la señal procesada es con frecuencia convertida
nuevamente a la forma analógica. Por lo anterior, se hace necesario desarrollar un trabajo
recepcional en donde se consideren ampliamente estos circuitos.
1.3 OBJETIVO
Presentar el desarrollo completo de los circuitos necesarios para el control y
monitoreo de la temperatura controlada a través de la PC.
1.4 ALCANCE
Con este trabajo pretendemos demostrar la gran utilidad que tienen los circuitos
electrónicos para propósitos de control y monitoreo de la temperatura, analizando el
comportamiento de los componentes en función de la respuesta del circuito a implementar.
Capitulo 2
ADQUISICION DE DATOS
2.1 DATOS
Un dato es una representación simbólica, ya sea numérica, alfabética, grafica, etc.
de un atributo o característica de una entidad. El dato no tiene valor semántico en si mismo,
pero convenientemente tratado se puede utilizar en la realización de cálculos o toma de
decisiones para
un fin determinado. El dato es utilizado comúnmente en el ámbito
informático.
2.1.1 Datos Analógicos
Un dato analógico es una onda producida por la oscilación o la aceleración de una
carga eléctrica y que conforme transcurre el tiempo tiene un valor. Se refiere a la
transmisión electrónica que se consigue añadiendo señales de frecuencia
o amplitud
variables a ondas transportadoras de corriente electromagnética alterna con una frecuencia
dada.
Las ondas electromagnéticas tienen componentes eléctricas y magnéticas. La radiación
electromagnética se puede ordenar en un espectro que se extiende desde ondas de
frecuencias muy elevadas con longitudes de onda pequeña hasta frecuencias muy bajas con
longitudes de onda altas. Las ondas electromagnéticas no necesitan un medio material para
propagarse; pueden atravesar el espacio desplazándose en el vació a una velocidad
aproximada de 300.000 Km. /s a la que se denomina con la letra c. Todas las radiaciones
del espectro electromagnético presentan la propiedades típicas del movimiento ondulatorio,
como la difracción y la interferencia. Las longitudes de onda van desde billonesimas de
metro hasta muchos kilómetros. La longitud de onda λ
la frecuencia f de las ondas
electromagnéticas, relacionadas mediante la expresión λ
· f = c, son importantes para
determinar su energía, su visibilidad, su poder de penetración y otras características.
Figura 2.1 Señal analógica
Un dato analógico se diferencia por ciertas características que a continuación se enlistan:
Los datos analógicos toman valores continuos.
Una señal analógica es una señal continua que se propaga por ciertos medios
Los datos analógicos se pueden representar por una señal electromagnética con el
mismo espectro que los datos.
La transmisión analógica es una forma de transmitir señales analógicas (que pueden
contener datos analógicos o datos digitales).
2.1.2 Datos Digitales
Se dice que una señal es digital cuando las magnitudes de la misma se representan
mediante valores discretos en lugar de variables continuas como por ejemplo un interruptor
de la luz ya que solo puede tomar valores o estados de abierto o cerrado, o la lámpara
misma es un ejemplo claro de una señal digital ya que toma los valores de encendida o
apagada.
En una señal digital se puede transportar información por una representación de código
en donde cada señal individual o pulso es llamado bit por lo tanto la unidad básica de un
dato digital es llamado bit.
En los sistemas digitales, como por ejemplo el computador, usan lógica de dos
estados: la corriente pasa o no por los componentes electrónicos del sistema. Estos estados
son en realidad dos niveles de tensión, uno alto H, y otro bajo L.
Por abstracción dichos niveles se sustituyen por ceros y unos, lo que facilita la
aplicación de la lógica y la aritmética binaria. Si el nivel alto se representa por 1 y el bajo
por 0, se habla de lógica positiva y en caso contrario de lógica negativa.
Un dato digital se puede distinguir por ciertas características que continuación se enlistan:
Los datos digitales toman valores discretos.
Los datos digitales se suelen representar por una serie de pulsos de tensión que
representan los valores binarios de la señal.
La transmisión digital tiene el problema de que la señal se atenúa y distorsiona con
la distancia, por lo que a cada cierta distancia hay que introducir repetidores de
señal.
Figura 2.2 Señal digital
2.2 PUERTO SERIAL
Un puerto serie es una interfaz de comunicaciones entre computadores y periféricos en
donde la información es transmitida bit a bit enviando un solo bit a la vez en contraste con
el puerto paralelo que envía varios bits a la vez.
El puerto serie por excelencia es el RS-232 que utiliza cableado simple desde tres hilos
hasta 25 y que conecta computadores o microcontroladores a todo tipo de periféricos,
desde terminales a impresoras y módems pasando por ratones y otros hardware.
El RS-232 original tenía un conector tipo D de 25 pines, sin embargo la mayoría de
dichos pines no se utilizaban, por lo que IBM incorporo desde su PS/2 un conector mas
pequeño de solamente 9 pines que es el que actualmente se utiliza.
Uno de los defectos del puerto serie iniciales eran su lentitud en comparación con los
puertos paralelos, sin embargo, con el paso del tiempo aparecieron multitud de puertos serie
de alta velocidad que los hacen muy interesantes ya que utilizan las ventajas de menor
cableado y solucionan el problema de la velocidad y mas barato usando la técnica de par
trenzado. Por ello, el puerto RS-232 e incluso multitud de puertos paralelos están siendo
remplazados por nuevos puertos serie como USB, firewire o el serial ATA.
Como ya se ha mencionado el puerto serie consiste en un conector tipo DB-25 de 25
pines, aunque es normal encontrar la versión de 9 pines DB-9 como se muestra en la figura
2.3, mas barato e incluso mas extendido para cierto tipo de periféricos. Las señales con las
que trabaja el puerto
de
+12V
lógico),
para
(cero
serie son digitales,
CONECTOR DB25
CONECTOR DB9
la
lógico) y -12V (1
entrada y salida de
datos, y a la inversa
en las
control. El estado de
reposo en la entrada
y la salida de datos
es
Dependiendo de la
velocidad
transmisión
empleada, es posible
tener cables de hasta 15 metros.
Figura 2.3 Conector de tipo DB25 y DB9
señales de
-12V.
de
Cada pin puede ser de entrada o de salida, teniendo una función específica cada uno
de ellos, de las cuales las más importantes son los que se muestran en la figura 2.4, con su
respectiva función establecida en la tabla 2.1.
TXD
RXD
DCD
DTR
CTS
RTS DSR
Figura 2.4 Conector tipo DB9 (serial)
PIN
TXD
RXD
DTR
DSR
RTS
CTS
DCD
FUNCION
TRANSMITIR DATOS
RECIBIR DATOS
TERMINAL DE DATOS LISTO
EQUIPO DE DATOS LISTO
SOLICITUD DE ENVIO
LIBRE PARA ENVIO
DETECCION DE PORTADORA
Tabla 2.1 Función de cada pin del puerto serial
Las señales TXD, DTR y RTS son de salida, mientras que RXD, DSR, CTS y DCD
son de entrada. La masa de referencia para todas las señales es SG (tierra de señal), pero
también existen otras señales como RI (indicador de llamada), y otras poco comunes como
las que se anexan en la tabla 2.2.
NUMERO
DE PIN
DB-25 DB-9
SEÑAL
DESCRIPCION
E/S
1
2
3
4
5
6
7
8
15
17
20
22
24
1
3
2
7
8
6
5
1
4
9
-
GND
TXD
TRANSMISION DE DATOS
RXD
RECEPCION DE DATOS
RTS
SOLICITUD DE ENVIO
CTS
AUTORIZACION DE ENVIO
DSR
DATOS LISTOS PARA ENVIAR
SG
TIERRA SEÑALADA
CD/DCD (DATO)DETECTOR DE ACARREO
TXC(*)
RELOJ DEL TRANSMISOR
RXC(*)
RELOJ DEL RECEPTOR
DTR
DATOS LISTOS PARA ENVIAR
RI
INDICADOR DE TERMINADO
RTXC(*) RELOJ TRANSMISOR/RECEPTOR
S
E
S
E
E
E
S
E
S
E
S
Tabla 2.2 Descripción de conectores DB-25 y DB-9
(*) Normalmente no conectados en el DB 25
A continuación se describe la función de cada pin del puerto serial ya sea en el conector
DB9 o el conector DB-25.
Transmisión de datos (TD): esta línea es utilizada para trasmitir datos desde el DTE
(equipo terminal de datos) al DCE (equipo transmisor de datos).Es mantenida en
estado de 1 lógico cuando nada se trasmite. La terminal comenzara a transmitir
cuando un 1 lógico este presente en las siguientes líneas:
*autorización de envió
*terminal de datos lista
*datos listos para enviar
*detector de acarreo
Recepción de datos (RXD): es utilizada para recibir datos desde la DCE al DTE. La
terminal comenzara a trasmitir cuando un 1 lógico este presente en las siguientes
líneas:
*autorización de envió
*terminal de datos lista
*datos listos para enviar
*detector de acarreo
El estándar especifica que los niveles de salida son -5 a -15 volts para el 1 lógico y
+5 a +15 volt para el 0 lógico, mientras que los niveles de entrada son -3 a -15volt para
un 1 lógico y +3 a +15 volt para un 0 lógico. Esto asegura que los bits puedan ser leídos
correctamente aun con grandes distancias entre la DTE y la DCE, especificados como 16.5
metros o 50 pies, aun cuando estas señales soportan mayores distancias dependiendo de la
calidad del cableado y el blindaje.
Solicitud de envío (RTS): en esta línea el DTE envía una señal cuando esta listo
para recibir datos del DCE. El DCE revisa esta línea para conocer el estado del DTE
y saber si puede enviar datos.
Autorización de envío (CTS): aquí el DCE envía una señal cuando esta listo para
recibir datos del DTE.
Datos listos para enviar (DSR): cuando se esta en un 1 lógico indica al DTE que el
DCE esta listo para enviar datos.
Tierra señalada: esta es la tierra lógica que es utilizada como punto de referencia
por todas las señales recibidas y transmitidas. Esta señal es indispensable y debe de
estar presente para todas las comunicaciones.
Detector de acarreo (CD): en esta línea el DCE indica al DTE que ha establecido
una línea portadora (una conexión) con un dispositivo remoto.
Datos listos para enviar (DTR): cuando esta línea esta en estado de 1 lógico se
puede comenzar a enviar y recibir datos. Cuando esta línea esta en nivel de 0
lógico, el DCE terminara la comunicación.
Indicador de terminado (RI): esta línea es utilizada, comúnmente, por el software
de comunicaciones cuando el dispositivo no esta en modo de auto responder para
indicarle que un dispositivo remoto esta llamando. Esta señal es optativa cuando no
se utiliza software que contestara la llamada automáticamente.
2.3 PUERTO PARALELO
El puerto paralelo envía datos a una tasa de n números de bits a través de n números de
cables a un tiempo. Seria fácil pensar que un sistema en paralelo es n veces mas rápido que
un sistema en serie, sin embargo esto no se cumple, básicamente el impedimento principal
es el tipo de cable que se utiliza para interconectar los equipos. Si bien un sistema de
comunicación en paralelo puede utilizar cualquier número de cables para transmitir datos,
la mayoría de los sistemas en paralelo utilizan ocho líneas de datos para transmitir un byte
a la vez.
Un típico sistema de comunicación en paralelo puede ser de una
dirección
(unidireccional) o de dos direcciones (bidireccional). El más simple mecanismo utilizado
en un puerto paralelo de una PC es de tipo unidireccional.
El puerto paralelo de una típica PC utiliza un conector hembra de tipo D de 25
pines (DB-25), este es el caso mas común, sin embargo también es importante conocer los
tres tipos de conectores definidos por el estándar IEEE 1284, el primero llamado 1284 tipo
A que es un conector hembra
de 25 pines de tipo D como el que se menciono al
principio y el que se muestra en la figura 2.5.
Figura 2.5 Conector del puerto paralelo DB25
El segundo conector se llama 1284 tipo B que es un conector de 36 pines de tipo
centronics que se encuentran en la mayoría de las impresoras; el tercero se denomina 1284
tipo C que se trata de un conector similar al 1284 tipo B pero más pequeño, además tiene
mejores propiedades eléctricas y mecánicas, este conector es el recomendado para nuevos
diseños. La función de cada pin del conector 1284 tipo A se describe en la tabla siguiente:
PIN
E/S
POLARIDAD
ACTIVA
DESCRIPCION
1
SALIDA
0
STROBE
2-9
SALIDA
-
LINEAS DE DATOS
(bit0/pin2,bit7/pin9)
10
ENTRADA
0
LINEA DE RECONOCIMIENTO
(activa cuando el sistema remoto toma datos)
11
ENTRADA
0
LINEA OCUPADA
(si esta activa, el sistema remoto no acepta datos)
12
ENTRADA
1
LINEA FALTA DE PAPEL
(si esta activa, falta papel en la impresora)
13
ENTRADA
1
SELECCIÓN DE LINEA
(si esta activa, la impresora se ha seleccionado)
LINEA AUTOFEED
14
SALIDA
0
15
ENTRADA
0
( si esta activa, la impresora inserta una nueva línea por cada retorno de carro)
LINEA DE ERROR
(si esta activa, hay un error en la impresora )
16
SALIDA
0
LINEA INIT
(si esta activa al menos 50µ segundos esta señal auto inicializa la impresora)
17
SALIDA
0
SELECCION DE LINEA DE ENTRADA
(cuando esta, inactiva obliga a la impresora a salir de línea)
18-25
-
TIERRA ELECTRICA
Tabla 2.3 Configuración del puerto paralelo estándar
En la tabla 2.3 se puede observar que el puerto paralelo tiene 12 líneas de salida (8
líneas de datos, strobe, autofeed, init, y select input) y 5 de entrada (acknowledge, busy,
falta de papel, select y error).
El objetivo del estándar es diseñar nuevos dispositivos que sean totalmente
compatibles con el puerto paralelo estándar (SSP) definido originalmente por la IBM. Hay
tres direcciones de E/S asociadas con un puerto paralelo de la PC, estas direcciones
pertenecen a registros de datos, el registro de estado, y el registro de control. El registro de
datos es un puerto de lectura escritura de ocho bits. Leer el registro de datos retorna el
último valor escrito en el registro de datos. Los registros de control y estado proveen la
interfase a las otras líneas de E/S. La distribución de las diferentes señales para cada uno
de los tres registros de un puerto paralelo esta dada en las siguientes tablas:
DIRECCION
NOMBRE
LECTURA /ESCRITURA
NO. DE BIT
Bit 7
PROPIEDADES
dato 7
Base+0
Puerto de
datos
Bit 6
Bit 5
Bit 4
Bit 3
Bit 2
Bit 1
Bit 0
Escritura
dato 6
dato 5
dato 4
dato 3
dato 2
dato 1
dato 0
Tabla 2.4 Registro de datos
DIRECCION
NOMBRE
LECTURA/ESCRITURA
Base +1
Puerto de estado
Solo lectura
NO. DE BIT
Bit7
Bit6
Bit5
Bit4
Bit3
Bit2
Bit1
Bit0
PROPIEDADES
Ocupado
Reconocimiento
Falta de papel
Selección de entrada
Error
IRQ (not)
Reservado
reservado
Tabla 2.5 Registro de estado
DIRECCION
Base+2
NOMBRE
Puerto de
control
LECTURA/ESCRITURA
NO.DE
BIT
Bit7
Bit6
Bit5
Bit4
Lectura/escritura
Bit3
Bit2
Bit1
Bit0
PROPIEDADES
No usado
No usado
Permite puerto bidireccional
Permite IRQ a través de la línea
de reconocimiento
Selecciona impresora
Inicializa impresora
Nueva línea automática
strobe
Tabla 2.6 Registro de control
Una PC soporta hasta tres puertos paralelos separados, por tanto puede haber hasta
tres juegos de registros en un sistema en un momento dado. Existen tres direcciones base
para el puerto paralelo asociadas con tres posibles puertos paralelo: 0x3BCh, 0x378h y
0x278h, nos referimos a estas como las direcciones base para el puerto paralelo LPT1,
LPT2 y LPT3, respectivamente. El registro de datos se localiza siempre en la dirección base
de un puerto paralelo, el registro de estado aparece en la dirección base +1, y el registro de
control aparece en la dirección base+2. Por ejemplo, para un puerto LPT2 localizado en
0x378h, esta es la dirección del registro de datos, al registro de estado le corresponde la
dirección 0x379h y su respectivo registro de control esta en la dirección 0x37Ah. Cuando
la PC se enciende, el BIOS ejecuta una rutina para determinar el número de puertos
presentes en el sistema asignando la etiqueta LPT1 al primer puerto localizado, si existen
mas puertos entonces se asignaran consecutivamente las etiquetas LPT2 y LPT3 de acuerdo
a la tabla 2.7.
Dirección inicial
Función
0000:0408
Dirección base para LPT1
0000:040 A
Dirección base para LPT2
0000:040C
Dirección base para LPT3
0000:040E
Dirección base para LPT4
Tabla 2.7 Direcciones base en el BIOS
Para trabajar con el puerto paralelo necesitamos en primer lugar conocer la
dirección base asignada por el BIOS (hablando de una PC compatible con IBM), podemos
utilizar un programa llamado Debug.exe que nos indique las direcciones asignadas.
En la plataforma de Windows vamos al menú inicio, seleccionamos programas y
luego MS-DOS y aquí podemos introducir los comandos indicados mas abajo. Si se trabaja
en ambiente DOS basta con teclear en la línea de comandos la palabra debug, el programa
responde colocando un signo de menos en donde tecleamos sin dejar espacios en blanco
d040:08L8 y presionamos la tecla entrar, entonces el programa Debug.exe nos indica en
una serie de números que significan las direcciones de los puertos paralelos disponibles en
nuestro sistema, la siguiente imagen muestra el resultado obtenido en la maquina.
Figura 2.6 Ventana de direcciones para el puerto paralelo
Se puede observar una serie de números de dos dígitos (ocho en total), se trata del
estado de memoria que empieza en la dirección 40:0008h. Los primeros seis pares de
numero representan las direcciones base para los puertos paralelos instalados, en la imagen
de arriba se aprecia que el único puerto paralelo de la maquina esta en la dirección 0x378h
(78 03). Los números están invertidos por que intel almacena tal información en un formato
de “byte de bajo orden – byte de alto orden”. Una ves que obtenemos la información
deseada cerramos el programa debug.exe simplemente tecleando la letra q y presionando la
tecla entrar.
2.4 DIFERENCIA ENTRE EL PUERTO SERIAL Y EL PUERTO
PARALELO
Los puertos seriales integrados usan conectores tipo D subminiatura de 9 patas en el
panel posterior. Estos puertos son compatibles con dispositivos como módems externos
impresoras, graficadores y los Mouse que requieren transmisión de datos en serie que hace
referencia a la transmisión de la información de un bit en una línea. La mayoría del
software utiliza el termino COM derivado del termino comunicaciones seguido de un
numero para designar un puerto serie como por ejemplo COM1 o COM2. Por lo tanto las
opciones predeterminadas para los puertos serie integrados del sistema son COM1 y
COM2.
El puerto paralelo integrado usa un conector tipo D subminiatura de 25 pines en el
panel posterior del sistema. Este puerto de E/S envía datos en formato paralelo (ocho bits
de datos) formando un byte, se envían simultáneamente sobre ochos líneas individuales en
un solo cable. El puerto paralelo se utiliza principalmente para impresoras. La mayoría de
los software usan el termino LPT derivado del termino impresor en línea. Por lo tanto la
opción predeterminada del puerto paralelo integrado del sistema es LPT1.
En la siguiente imagen se aprecian los diferentes puertos por los que se puede
realizar una comunicación entre un componente externo y la CPU. Dichos componentes
son los siguientes:
*Conector de video
*Conector del puerto paralelo
*Conector de teclado
*Conector para Mouse
*Conector del puerto serie
*Conector del puerto USB
Figura 2.7 Tipos de puertos
2.5 LA UART
El corazón de un sistema de comunicaciones serie es la UART, acrónimo de
Universal Asynchronous Receiver- Transmiter. Es un chip cuya misión principal es
convertir los datos recibidos del bus del PC en formato paralelo, a un formato serie que será
utilizado en la transmisión hacia el exterior. También realiza el proceso contrario:
transformar los datos serie recibidos del exterior en un formato paralelo entendible por el
bus.
La UART es un dispositivo programable en el que se pueden establecerse las
condiciones que se utilizaran para la transmisión como son la velocidad, la paridad,
longitud y bits de parada.
Los UART más significativos son:
1. NS 8250: la UART de IBM PC original; este circuito tenia un pequeño bug que fue
corregido mediante las oportunas modificaciones en las rutinas BIOS y fue sustituido por el
8250-B.
2. NS 8250A: este chip corregía los problemas de los predecesores, sin embargo no podía
ser utilizado en algunos modelos precisamente por que el BIOS trataba de corregir un
problema inexistente. En cualquier caso este chip no funcionaba más allá de los 9600bps.
3. NS 8250B: este chip fue el último de la saga de los 8250, y reinstalo el antiguo bug, de
forma que pudiera funcionar correctamente con las BIOS de los TX. Todos los de esta serie
tenían un acceso muy lento, lo que obligaba a incluir estados de espera en el procesador.
Tampoco funcionaba por encima de 9600 bps.
4. NS 16450: fue el chip elegido para acompañar a los procesadores 286 de clase AT.
Funcionaban bien a 9600 bps, e inauguro la época de módems de alta velocidad. Sin
embargo no funcionaba bien en los sistemas XT, debiendo ser sustituido por el 16550.
5. NS 16550: fue el primer chip de su clase dotado con búferes FIFO para su transmisión y
recepción de 16 bytes, que le hacen especialmente indicado para comunicaciones rápidas.
Era mas rápido que el 16450, operando encima de los 9600 bps, pero seguía adoleciendo
de algunos problemas, especialmente en los búferes, por lo que también fue sustituido.
6. NS 16550 A: es la más rápida y fiable de las UARTs; adecuada para operar con módems
de alta velocidad, puede operar a 115 Kbps. Su lógica es compatible pin a pin con el 16450,
al que puede sustituir.
7. A partir de aquí existen versiones mejoradas de NS o compatibles con el 16550 A de
otros fabricantes.
El correcto funcionamiento y velocidad de la UART es fundamental para la comunicación
serie; con independencia de la velocidad del MODEM o del adaptador RDSI que tengamos,
la comunicación no será mas rápida que la que permita la UART.
2.5.1 Detección de Tipo de UART
Los programas de diagnostico suelen informar el tipo de UART utilizada por los
puertos serie. En MS DOS puede utilizarse el programa de diagnostico de Microsoft msd.
Exe; este programa
viene incluido en el directorio tools/old MSDOS del CD de
distribución de Windows 98.
En Windows 98 seleccionar menú de inicio/configuración/panel de control/módems y
se selecciona la pestaña diagnostico, seguido del botón mas información. Si existe un
MODEM instalado, después de una pausa se muestran las características del MODEM y la
UART del puerto.
En la figura 2.8 se muestra la información correspondiente a un puerto serie al que se
le ha conectado un MODEM PC card de ejecución combinada (combo) junto con una
tarjeta de red Ethernet 10/100.
Figura 2.8 Detección de la UART
2.5.2 Comprobación de la UART
Los programas de diagnostico que comprueban la UART utilizan un sistema de
realimentación para verificar que los datos se envíen y se lean correctamente. La ejecución
practica utiliza un conector con algunos pines puenteados para simular las señales de un
interlocutor aunque este no este presente, y que las señales emitidas por la patilla TX se
reciban por la patilla de recepción RX. Este conector se denomina circuito cerrado (loop
back), y su utilización permite que la UART reciba los datos que ella misma envía, en una
situación análoga a la que tendría dialogando con otro dispositivo, con lo que puede
verificarse la corrección del proceso.
En la tabla 2.8 se muestran las conexiones necesarias para construir conectores de
prueba para salidas DB9 y DB25.
CONECTOR LOOPBACK PARA DB9
RECEPCION DE DATOS
2-3
TRANSMISION DE DATOS
DATOS LISTOS PARA ENVIAR 4-6-1
DATOS LISTOS PARA ENVIAR + DETECTOR DE
ACARREO
SOLICITUD DE ENVIO
7-8
AUTORIZACION DE ENVIO
CONECTOR LOOPBACK PARA DB25
RECEPCION DE DATOS
3-2
TRASMISION DE DATOS
DATOS LISTOS PARA ENVIAR 20-6-8
DATOS LISTOS PARA ENVIAR + DETECTOR DE
ACARREO
SOLICITUD DE ENVIO
4-5
AUTORIZACION DE ENVIO
Tabla 2.8 Conexiones de prueba para DB9 y DB25
2.6 PUERTO USB
Anteriormente demasiados usuarios utilizaban
los puertos paralelos y seriales:
gruesos conectores con múltiples contactos que se sujetaban a la parte posterior de la
computadora con tornillos o a presión. Impresoras, escáneres, ratones, módems y otros
dispositivos usaban esos tipos de interfaz para enviar o recibir información de la
computadora. Durante años fueron suficientes, pero las velocidades requeridas por
elementos como las cámaras digitales, los discos duros externos, quemadores de DVD y
CD’s, así como la cantidad de estos aparatos que una sola computadora requiere soportar,
obligaron al desarrollo de nuevas interfaces, más simples, más rápidas y más económicas,
entre las que destacan USB y FireWire.
USB (Bus en Serie Universal) comenzó a desarrollarse en 1994 a partir de diversos
estudios que realizaron las empresas Compaq©, Intel©, Microsoft© y NEC©, partiendo de
tres elementos clave:
La conexión de la computadora personal a los servicios de telefonía, que hasta
ese año había sido una industria por separado, previniendo la expansión de las
telecomunicaciones e Internet en todos los ámbitos.
La facilidad de uso, en contraposición a las interfaces de esa época que
implicaban el uso de diversos controladores, constantes configuraciones y un
bajo rendimiento.
La expansión de puertos, hasta entonces limitada a la inserción de tarjetas de
circuitos en la propia computadora personal y, en consecuencia, una muy
limitada flexibilidad de elementos, dispositivos y programas compatibles.
La primera especificación comercial de USB (conocida como 1.1) fue liberada el 23
de septiembre de 1998. Un año después, USB era ya una interfaz común en la mayoría de
los equipos de cómputo personal. El objetivo se cumplió: permitir que dispositivos de
diversos fabricantes pudieran comunicarse entre sí en una arquitectura abierta. USB
Universal Serial Bus es una interfase plug & play entre la PC y ciertos dispositivos tales
como teclados, Mouse, scanner, impresoras, módems, placas de sonido, cámaras, etc.
Una característica importante es que permite a los dispositivos trabajar a
velocidades mayores, en promedio a unos 12 Mbps, esto es más o menos de 3 a 5 veces
más rápido que un dispositivo de puerto paralelo y de 20 a 40 veces más rápido que un
dispositivo de puerto serial.
2.6.1 Estándares del USB
La tecnología USB ha sido promovida principalmente por intel, auque le han seguido
todos los grandes fabricantes, de forma que se ha convertido en un estándar muy
importante. En sus comienzos los interesados en esta tecnología se agruparon en un foro, el
USB implementers forum inc. USB-IF, que agrupa a más de 450 compañías y ha publicado
diversas revisiones de la norma:
USB 0.9: el primer borrador publicado en noviembre de 1995.
USB 1.0: publicada en 1996 y establece dos tipos de conexión, la primera
denominada velocidad baja (low speed), ofrece 1.5 Mbps, y esta pensada para
periféricos que no requieren un gran ancho de banda, como ratones o joysticks. La
segunda denominada velocidad completa (full speed), ofrece 12 Mbps, y esta
destinada a los dispositivos más rápidos.
USB 1.1: publicada en 1998, añade detalles y precisiones a la norma inicial; es el
estándar mínimo que debe cumplir un dispositivo USB.
USB 2.0: su versión final fue publicada en abril del 2000; es una extensión de la
norma compatible con las anteriores. Permite velocidades de hasta 480 Mbps,
denominada alta velocidad (high speed).
2.6.2 Topología
Los dispositivos USB adoptan una topología de estrella y se organizan por niveles
apartir de un controlador host instalado en la placa base, que actúa de interfaz entre el bus
de esta y el primer dispositivo USB, denominado concentrador raíz (root hub), instalado
también en la placa. El controlador de host es único; suele ser un chip intel con una
denominación como 8237 1AB/EB; 8280 1DB, etc. Dada la proliferación de este tipo de
dispositivos, las placas modernas pueden disponer de varios concentradores raíz, cada uno
con su propia salida. Cada uno de estos concentradores se consideran el origen de un bus
(numerados sucesivamente a partir del 0), del que cuelgan los dispositivos en el orden de
que son detectados por el sistema.
El bus USB soporta intercambio simultáneo de datos entre un computador anfitrión
y un amplio conjunto de periféricos. Todos los periféricos conectados comparten el ancho
de banda del bus por medio de un protocolo de arbitraje basado en testigos (tokens). El bus
permite conexión y desconexión dinámica, es decir, que los periféricos se conecten,
configuren, manipulen y desconecten mientras el sistema anfitrión y otros periféricos
permanecen en funcionamiento.
En un bus USB existen dos tipos de elementos: Anfitrión (host) y dispositivos; a su vez,
los dispositivos pueden ser de dos tipos: concentradores y funciones.
Los concentradores (hubs) son el centro de una estrella, y sirven para conectar con
el sistema anfitrión, con otro hub o con una función. Cada hub puede conectar hasta
7 dispositivos, aunque lo normal es que sean de cuatro salidas, y proporcionar 500
mA de energía de alimentación (hasta 2.5 W) a cada uno de ellos, ya que el cable de
conexión tiene hilos de señal (datos) y de alimentación (5VCC ± 0.25V).
Una función es un dispositivo capaz de transmitir o recibir datos o información de
control en un bus USB, suele conectarse como un dispositivo independiente
enlazado por un cable de menos de 5 metros, a un puerto del hub o directamente al
sistema anfitrión.
De esta descripción se desprende que cada segmento del bus representa una conexión punto
a punto de alguno de los tipos siguientes:
Sistema anfitrión
Función
Sistema anfitrión
Concentrador
Concentrador
Concentrador
Concentrador
Función
Cuando se dice que un hub esta conectado a otro hub, significa que pueden
conectarse dispositivos en cascada; el sistema soporta un total de 127 dispositivos. Una
característica importante es que el concentrador (hub) proporciona la energía necesaria a la
función por el cable de conexión lo que evita la necesidad de fuentes de alimentación
independientes a las funciones.
2.6.3 Funcionamiento del USB
El bus serie es síncrono, y utiliza el algoritmo de codificación NRZI (non return to
zero inverted). En este sistema existen dos voltajes opuestos; una tensión de referencia
corresponde a un 1 pero no hay retorno a cero entre bits, de forma que una serie de unos
corresponde a un voltaje uniforme; en cambio los ceros se marcan como cambios de nivel
de tensión, de modo que una sucesión de ceros produce sucesivos cambios de tensión entre
los conductores de señal.
A partir de las salidas proporcionadas por los concentradores raíz y utilizando
concentradores adicionales, pueden conectarse mas dispositivos hasta el limite señalado.
El protocolo de comunicación utilizado es de testigo, que guarda cierta similitud con el
sistema token-ring de IBM. Puesto que todos los periféricos comparten el bus y pueden
funcionar de forma simultánea, la información es enviada por paquetes; cada paquete
contiene una cabecera que indica el periférico a que va dirigido. Existen cuatro tipos de
paquetes distintos: token; datos; handshake, y especial; el máximo de datos por paquetes es
de 8; 16; 32 y 64 bytes. Se utiliza un sistema de detección y corrección de errores bastante
robusto tipo CRC (cyclical redundancy check).
El funcionamiento esta concentrado en el host, todas las transacciones se originan
en el. Es el controlador host el que decide todas las acciones, incluyendo el número
asignado a cada dispositivo, su ancho de banda, etc. Cuando se detecta un nuevo
dispositivo es el host el encargado de cargar los drivers oportunos sin necesidad de
intervenir por el usuario.
El sistema utiliza cuatro tipos de transacciones que resuelven todas las posibles
situaciones de comunicación. Cada transacción utiliza un mínimo de tres paquetes, el
primero es siempre un token que avisa al dispositivo que puede iniciar la transmisión.
Transferencia de control (control tranfer): ocurre cuando un dispositivo se conecta por
primera vez. En este momento el controlador del host envía un paquete token al
periférico notificándole el número que le ha asignado.
Transferencia de pila de datos (bulk data transfer): este proceso se utiliza para enviar
gran cantidad de datos de una sola vez. Es útil para dispositivos que tienen que
enviar gran cantidad de datos a la vez, como escáneres o maquinas de fotografía
digital.
Transferencia por interrupción (interrupt data transfer): este proceso se utiliza cuando
se solicita enviar información por el bus en una sola dirección (de la función al host).
Transferencia de datos isócrona (isochronous data transfer): este proceso se utiliza
cuando es necesario enviar datos en tiempo real. Los datos son enviados con una
cadencia precisa ajustada a un reloj, de modo que la transmisión es a velocidad
constante.
2.6.4 Cables y Conectores
El cable del bus USB es de cuatro hilos y comprende líneas de señal (datos) y
alimentación, con lo que las funciones pueden utilizar un único cable.
Existen dos tipos de cable: apantallado y sin apantallar. En el primer caso el par de
hilos de señal es trenzado; los de tierra y alimentación son rectos, y la cubierta de
protección (pantalla) solo puede conectarse a tierra en el anfitrión. En el cable sin apantallar
todos los hilos son rectos. Las conexiones a 15 Mbps y superiores exigen cable apantallado.
Se utilizan diámetros estándar para los hilos de alimentación de bus. Para cada
sección se autoriza una longitud máxima del segmento en donde el calibre de los
conductores destinados a alimentación de los periféricos varía desde 20 a 26 AWG,
mientras que el de los conductores de señal es de 28 AWG. La longitud máxima de los
cables es de 5 metros.
En la tabla 2.9 (a) se muestran estas distancias; y en la tabla 2.9 (b) se muestran la
disposición de pines y colores de identificación.
AWG
28
26
24
22
20
Mm. Ø
0.321
0.405
0.511
0.644
0.812
a
Long. Max
0.81m
1.31m
2.08m
3.33m
5.00m
Pin
1
2
3
4
Nombre
VBUS
DD+
GND
Descripción
+5VCC
Dato Dato +
Tierra
Color
rojo
Azul
Amarillo
verde
b
Tabla 2.9 a) Características del cable; b) distribución de pines USB.
Se usan dos tipos de conectores, A y B. ambos son polarizados (solo pueden
insertarse en una posición) y utilizan sistemas de presión para sujetarse. Los de tipo A
utilizan la hembra en el sistema anfitrión, y suelen usarse en los dispositivos en los que la
conexión es permanente (ratones y teclados). Los de tipo B utilizan la hembra en el
dispositivo USB (función) y se utilizan en sistemas móviles (cámaras fotográficas,
altavoces). En general podemos afirmar que la hembra de los conectores A están en el lado
del host (PC) o de los concentradores (hubs), mientras las de tipo B están del lado de los
periféricos.
Conector tipo A
Conector tipo B
Figura 2.9 Tipos de conectores USB
2.7 MODOS DE TRANSMISION
2.7.1 Transmisión Asíncrona
La comunicación asíncrona consiste en introducir un bit de inicio que indica el
comienzo de una transmisión de un dato. La posición de cada bit puede ser determinada
cronometrando los bits a intervalos irregulares, tomemos en cuenta que los dos sistemas
(transmisor y receptor) pueden no estar sincronizados por una señal de reloj, es decir que
en este método las terminales de la comunicación no están sincronizadas por una línea de
señal, por eso es importante que ambos sistemas estén configurados a la misma velocidad
de transmisión. Cuando el dispositivo receptor de la comunicación recibe el bit de inicio,
comienza un temporizador de corto tiempo, y ya que los datos son una pequeña cantidad de
bits, es difícil que el reloj salga de sincronía.
Comúnmente en las computadoras se usan datos de 7 a 8 bits que representan símbolos
o letras (caracteres). Estos caracteres son interpretados como código ASCII (código
estándar americano para el intercambio de información) para acomodar todas las letras
mayúsculas y minúsculas del alfabeto, dando un total de 256 caracteres de 8 bits, aunque
algunas computadoras aun usan el código ASCII con 127 caracteres de 7 bits utilizando el
octavo como bit de paridad. Por convención el bit menos significativo de la palabra es
enviado primero y el más significativo al final.
Cuando se establece una comunicación, el dispositivo transmisor codifica cada dato
trasmitido agregándole un bit de inicio al principio y 1 o 2 bits al final. En algunas
ocasiones se agrega un bit de paridad entre el último bit de dato y el primer bit de paro, esto
es utilizado como verificación de integridad de datos.
Pueden ser utilizados 5 tipos diferentes de bits de paridad, los cuales son los siguientes:
Bit marcador de paridad (siempre es un 1 lógico).
Bit de paridad de espacio (siempre es un 0 lógico).
Bit de paridad par es puesto en 1 lógico, si cuando al contar el número de bits en la
palabra el resultado es par.
Bit de paridad non es puesto en 1 lógico, si cuando al contar el número de bits
en la palabra, el resultado es non.
Dato sin bit de paridad, o sin paridad, es cuando se elimina el bit de paridad del
dato.
Según se conforme el marco de datos, es la forma como se da referencia al marco
mismo. Con marco nos referimos a un carácter transmitido, es decir el conjunto de bits
que conforman a dicho carácter.
Por ejemplo: un dato de 8 bits, con paridad non y un bit de paro es conocido como 8N1 y
la trama será como se muestra en la figura 2.10.
Marco de datos de comunicación serial asíncrona
Figura 2.10 Trama de un dato 8N1
Otro factor importante de toda señal serial asíncrono es la velocidad de
comunicación, que es la velocidad a la que los datos son trasmitidos. Las velocidades a las
que se envía la información comienzan en los 50bps y casi de manera estándar, se van
duplicando hasta los 384 000bps.
2.7.2 Transmisión Síncrona
La transmisión es síncrona cuando se efectúa sin atender a las unidades de
comunicación básicas, normalmente caracteres. Los bits se envían a una cadencia constante
sin discriminar los caracteres que componen.
Emisor y receptor se encargan de la sincronización de modo que sean capaces de
reconstruir la información original. Esto exige que los dos extremos de la comunicación
sincronicen correctamente sus relojes con objeto de asegurar una duración del bit constante
e igual en ambos extremos. En las transmisiones síncronas se suelen utilizar caracteres
especiales para evitar los problemas de pérdidas de sincronía en los caracteres informativos
transmitidos.
El modo de transmisión síncrona permite velocidades de transmisión mayores que la
asíncrona. En primer lugar, porque es menos sensible al ruido y, en segundo lugar, porque
obtiene un mejor rendimiento de la línea de datos. En este modo de transmisión no son
necesarios los bits de inicio y fin que acompañan a cada carácter en la transmisión
asíncrona.
En el caso de la transmisión síncrona no tendremos la sobreexplotación overhead
que suponen los bits de inicio y fin. Esta sobreexplotación consiste en que se transmiten
más bits que los estrictamente necesarios para transportar los datos; por ejemplo, en la
transmisión asíncrona se transmiten los bits de inicio y fin acompañando a cada carácter de
los datos de usuario. Efectivamente, habrá que poner algunos caracteres de sincronía pero
en menor medida que en la transmisión asíncrona.
Normalmente se utilizan tres tipos de sincronismo:
Orientada a carácter:
El sincronismo de carácter se ocupa de determinar cuáles son los bits que componen cada
palabra transmitida en el código elegido para efectuar la transmisión, es decir, debe
establecer las fronteras entre caracteres, saber cuál es el primer y el último bit de cada
carácter. En la transmisión asíncrona esta sincronía de carácter la realizan los bits de inicio
y fin, mientras que en las transmisiones síncronas los caracteres especiales enviados,
normalmente caracteres SYN, son los encargados de establecer las divisiones entre los
distintos bloques informativos. A partir de estos bloques el receptor averigua las fronteras
entre caracteres.
Orientada a bit:
El sincronismo de bit se encarga de determinar el momento preciso en que comienza o
acaba la transmisión de un bit. Así, en las transmisiones asíncronas el sincronismo de bit se
consigue arrancando el reloj del receptor en el mismo momento en que le llega el bit de
inicio de cada carácter. Si la base de tiempos de los relojes del emisor y del receptor es
aproximadamente la misma, cada bit quedará determinado por su duración temporal. Esta
exigencia en la coincidencia de las bases de tiempos en el emisor y en el receptor obliga en
muchos casos a predeterminar la velocidad de transferencia o a negociarla en la etapa
inicial de la transmisión.
En el caso de la transmisión síncrona es la propia señal de reloj, transmitida por la línea
junto con los datos, la que se encarga de efectuar el sincronismo de bit.
Sincronismo de bloque:
El sincronismo de bloque es un proceso de sincronismo de carácter más avanzado. Para ello
se define un conjunto de caracteres especiales, tomados usualmente entre los caracteres de
control del código ASCII, que fragmentan el mensaje en bloques y que deben llevar una
secuencia determinada. Las faltas de sincronía se detectan cuando se rompe esta secuencia
previamente fijada por el protocolo de comunicaciones.
2.8 CONTROL DE LOS DATOS
El RS-232 puede transmitir los datos en grupos de 5, 6,7 u 8 bits, a unas velocidades
determinadas (normalmente 9600 bps o más). Después de la transmisión de los datos, le
sigue un bit opcional de paridad (indica si el numero de paridad de bits transmitidos es par
o impar, para detectar fallos), y después 1 o 2 bits de stop. Normalmente, el protocolo
utilizado es 8N1 (que significa, 8 bits de datos, sin paridad y con un bit de stop).
Una vez que se ha comenzado la transmisión de un dato, los bits tienen que llegar uno
detrás de otro a una velocidad constante y en determinados instantes de tiempo. Por eso se
dice que el RS-232 es asíncrono por carácter y síncrono por bit. Los pines que portan los
datos son RXD y TXD. Las demás se encargan de otros trabajos: DTR indica que el
computador esta encendido, DSR que el aparato conectado a dicho puerto esta encendido,
RTS que el computador puede recibir datos ya que no se encuentra ocupado, CTS que el
aparato conectado puede recibir datos, y DCD detecta que existe una comunicación,
presencia de datos.
Tanto el aparato a conectar como el computador(o el programa terminal) tienen que
usar el mismo protocolo serie para comunicarse entre si. Puesto que el estándar RS-232 no
permite indicar en que modo se esta trabajando, es el usuario quien tiene que decidirlo y
configurar ambas partes. Como ya se ha visto, los parámetros que hay que configurar son:
protocolo serie (8N1), velocidad del puerto serie, y protocolo de control de flujo. Este
último puede ser por hardware o bien por software. La velocidad del puerto serie no tiene
por que ser la misma que la de transmisión de los datos, de hecho debe ser superior. Por
ejemplo, para transmisiones de 1200 baudios es recomendable usar 9600 baudios, y para
9600 se pueden usar 38400 o bien 19200 baudios.
La figura 2.11 muestra la transmisión de un dato con formato 8N1. El receptor indica al
emisor que puede enviarle datos activando la salida RTS. El emisor envía un bit de START
(nivel alto) antes de los datos, y un bit de stop (nivel bajo) al final de estos.
___________________________________
Emisor ===== Receptor
____________________________________
CTS <- | | <- RTS
TXD -> | | 1 | 0 0 | 1 | 0 | 1 1 | 0 | -> RXD
START STOP
_____________________________________
Figura 2.11 Transmisión de un dato con formato 8N1
Capítulo 3
CONVERTIDORES ADC Y DAC
3.1 LA DIGITALIZACION
La digitalización supone un cambio radical en el tratamiento de la información.
Permite su almacenamiento en grandes cantidades en objetos de tamaño reducido o lo que
es más revolucionario, liberarlas de los propios objetos y de sus características materiales y
hacerla residir en espacios no topológicos, como las redes informáticas accesibles desde
cualquier lugar del mundo en tiempo real. También podemos reproducirlas sin merma de
calidad de modo indefinido, enviarla instantáneamente a cualquier lugar de la tierra y
poder manipularla.
3.1.1 Ventajas de la Señal Digital
1) La señal digital es más resistente al ruido. La señal digital es menos sensible que la
analógica a las interferencias.
2) Ante la perdida de cierta cantidad de información, la señal digital puede ser reconstruida
gracias a los sistemas de regeneración de señales. También cuenta, con
sistemas de
detección y corrección de errores que por ejemplo permiten introducir el valor de una
muestra dañada obteniendo el valor medio de las muestras adyacentes (interpolación).
3) Facilidad en el procesamiento de la señal.
4) La señal digital permite la multigeneración infinita sin perdidas de calidad. Esta ventaja
solo es aplicable a los formatos de disco óptico, la cinta magnética digital, aunque en menor
medida que la analógica (solo soporta como mucho 4 o 5 generaciones).
3.1.2 Desventajas de la Señal Digital
1) La señal digital requiere mayor ancho de banda para ser transmitida que la analógica.
2) Se necesita una conversión analógica a digital previa y una decodificación posterior, en
el momento de la recepción.
3) La transmisión de señales digitales requiere una sincronización precisa entre los tiempos
de reloj de transmisor, con respecto a los del receptor. Un desfase, por mínimo que sea,
cambia por completo la señal.
3.2 CONVERTIDOR ANALOGICO-DIGITAL
Un convertidor analógico a digital es un dispositivo electrónico capaz de convertir un
voltaje determinado en un valor binario, en otras palabras, es el encargado de transformar
señales análogas a digitales (0’s y 1’s) con el propósito de facilitar su procesamiento y
hacer la señal resultante mas inmune al ruido y otras interferencias a las que son mas
sensibles las señales analógicas.
3.2.1 Características Básicas de un Convertidor A/D
Las características principales que se han de tener en cuenta a la hora de la conversión
analógica a digital son:
Numero de bits
Resolución
Tiempo de conversión
* Número de bits: es el número de bits que tiene la palabra de salida del convertidor, y por
tanto es el número de pasos que admite el convertidor. Así un convertidor de 8 bits solo
podrá dar a la salida 28=256 valores posibles.
* Resolución: es el mínimo valor que puede distinguir el convertidor en su entrada
analógica, o dicho de otro modo, la mínima variación Vi, en el voltaje de entrada que se
necesita para cambiar en un bit la salida digital.
Resumiendo tendremos que:
Vi
Vfe
(2 n 1)
(3.1)
Donde n es el número de bits del convertidor, y Vfe la tensión de fondo de escala, es decir,
aquella para la que salida digital es máxima. La tensión de fondo de escala depende del
tipo de convertidor, pero normalmente se fija a nuestro gusto, en forma de una tensión de
referencia externa. Por ejemplo un convertidor de 8 bits con una tensión de fondo de escala
de 2V tendrá una resolución de:
2V
mV
7,84
8
paso
2 1
(3.2)
En cambio, para el mismo convertidor, si cambiamos la tensión de referencia, y por tanto la
de fondo de escala, la resolución será de:
5V
mV
19,6
8
paso
2 1
(3.3)
* Tiempo de conversión: es el tiempo que tarda en realizar una medida el convertidor en
concreto, y dependerá de la tecnología de medida empleada. Evidentemente nos da una cota
máxima de la frecuencia de la señal a medir.
Este tiempo se mide como el transcurrido desde que el convertidor recibe una señal de
inicio de conversión, hasta que en la salida aparece un dato valido. Para que tengamos
constancia de un dato valido tenemos dos caminos:
Esperar el tiempo de conversión máximo que aparece en la hoja de características.
Esperar a que el convertidor nos envié una señal de fin de conversión.
Si no respetamos el tiempo de conversión, en la salida tendremos un valor, que
dependiendo de la constitución del convertidor será:
Un valor aleatorio, como consecuencia de la conversión en curso.
El resultado de la última conversión.
3.2.2 Procesos que intervienen en la Conversión Analógico a Digital
* Muestreo
Para convertir una señal analógica en digital, el primer paso consiste en realizar un
muestreo de esta, o lo que es igual, tomar diferentes muestras de tensiones o voltajes en
diferentes puntos de la onda senoidal. La tasa o frecuencia de muestreo es el número de
muestras por unidad de tiempo que se toman de una señal continua para producir una señal
discreta. Como todas las frecuencias generalmente se expresa en hercios o múltiplos suyos.
En algunos casos como en el de una grabación digital de audio, a mayor cantidad de
muestras tomadas, mayor calidad y fidelidad tendrá la señal digital resultante.
Durante el proceso de muestreo se asignan valores numéricos equivalentes a la
tensión o voltaje existente en diferentes puntos de la señal senoidal con la finalidad de
realizar a continuación el proceso de cuantización.
Señal Analógica
Muestreo De La Señal Analógica
Figura 3.1 Muestreo de la señal analógica
Por la tanto, una señal cuyo muestreo se realiza a 24 kHz tendrá menos calidad y
fidelidad que otra realizada a 48 kHz. Sin embargo, mientras mayor sea el número de
muestras tomadas, mayor será también el ancho de banda necesario para transmitir una
señal digital.
* Teorema de Nyquist
Según el teorema de muestreo de nyquist –shannon, para poder replicar con
exactitud la forma de una onda es necesario que la frecuencia de muestreo sea como
mínimo el doble de la máxima frecuencia a muestrear. El teorema de nyquist solo indica el
valor mínimo necesario para que el muestreo resulte eficaz. Por encima de ese valor, cuanto
mayor sea el número de niveles de comparación (muestras), mas fiel será la conversión
analógico a digital, lo que se traduce en una mayor calidad de la señal resultante. Cuantas
mas muestras se tengan, será posible reconstruir mejor la señal: no obstante, a mayor
frecuencia de muestreo, mayor será el ancho de banda necesario.
En términos informáticos, una mayor frecuencia de muestreo requiere una mayor
resolución (numero de bits). Un numero mayor de bits implica, en la practica que la señal
se procese mas lentamente y por lo general un encarecimiento del equipo que requiere
interfaces mas potentes, mas memoria etcétera. Además aunque se siga aumentando la
frecuencia de muestreo, la calidad no continua incrementándose indefinidamente.
Matemáticamente se ha demostrado que, llegado un determinado punto la calidad ya no
aumenta debido al principio general de rendimientos marginales decrecientes.
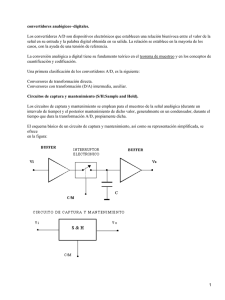
* Circuitos de Muestreo y Retención (S/H: Sample And Hold)
Los circuitos de muestreo y retención se emplean para el muestreo de la señal
analógica (durante un intervalo de tiempo) y la posterior retención de dicho valor,
generalmente es un condensador, durante el tiempo que dura la transformación A/D,
propiamente dicha.
El esquema básico de un circuito de muestreo y retención, así como su
representación simplificada se muestra en la figura 3.2.
a)
b)
Figura 3.2 Esquema básico (a) y representación simplificada (b) de un circuito de muestreo y
retención (S&H).
El convertidor A/D manda un impulso de anchura t w por la línea C/M, que activa el
interruptor electrónico, cargándose el condensador C, durante el tiempo tw. En el caso ideal,
la tensión en el condensador sigue la tensión de entrada. Posteriormente el condensador
mantiene la tensión adquirida cuando se abre el interruptor.
En la figura 3.3 se muestran las formas de las señales de entrada, salida y control del
interruptor.
Figura 3.3 Señal de entrada, salida y control del interruptor.
El grafico tiene un carácter ideal, puesto que tanto la carga como la descarga del
condensador están relacionadas estrechamente con su valor y con el de las resistencias y
capacidades parásitas asociadas al circuito.
Se recalca el hecho de que el control de la señal C/M procede del convertidor A/D, que es
el único que conoce el momento en que finaliza la conversión de la señal.
* Cuantificación
El proceso de cuantificación es uno de los pasos que se siguen para lograr la
digitalización de una señal analógica. Básicamente la cuantificación lo que hace es
convertir una sucesión de muestras de amplitud continua en una sucesión de valores de
amplitudes discretas, o lo que es lo mismo una señal digital aunque no binaria.
Durante el proceso de cuantificación se mide el nivel de voltaje de cada una de las
muestras, obtenidas en el proceso de muestreo y se les atribuye a un valor finito de
amplitud, seleccionado por aproximación dentro de un margen de niveles previamente
fijado. Los valores preestablecidos para ajustar la cuantificación se eligen en función de la
propia resolución que utilice el código empleado durante la codificación. Si el nivel
obtenido no coincide exactamente con ninguno, se toma como valor el inferior más
próximo.
En este momento, la señal analógica (que puede tomar cualquier valor) se convierte
en una señal digital, ya que los valores que están preestablecidos, son finitos. No obstante,
todavía no se traduce al sistema binario. La señal ha quedado representada por un valor
finito que durante la codificación será cuando se transforme en una sucesión de unos y
ceros.
Así pues la señal digital que resulta tras la cuantificación es sensiblemente diferente
a la señal eléctrica analógica que la origino, por lo que siempre va a existir una cierta
diferencia entre ambas que es lo que se conoce como error de cuantificación que se produce
cuando el valor real de la muestra no equivale a ninguno de los escalones disponibles para
su aproximación y la distancia entre el valor real y el que se toma como aproximación es
muy grande. Un error de cuantificación se convierte en un ruido cuando se reproduzca la
señal tras el proceso de decodificación digital.
Figura 3.4 Cuantificación de la señal analógica
* Tipos de Cuantificación
Para minimizar los efectos negativos del error de cuantificación, se utilizan distintas
técnicas de cuantificación:
1. Cuantificación uniforme o lineal: se utiliza un bit rate constante. A cada muestra se le
asigna el valor inferior mas próximo independientemente de lo que ocurra con las muestras
adyacentes.
2. Cuantificación
no uniforme o no lineal: se estudia la propia entropía de la señal
analógica y se asignan niveles de cuantificación de manera no uniforme (bit rate variable)
de tal modo que, se asigne un mayor número de niveles para aquellos márgenes en que la
amplitud del voltaje cambia más rápidamente.
3. Cuantificación logarítmica: se hace pasar la señal por un compresor logarítmico antes de
la cuantificación. Como en la señal resultante la amplitud del voltaje sufre variaciones
menos abruptas la posibilidad que se produzca un ruido de cuantificación
grande
disminuye. Antes de reproducir la señal digital, esta tendrá que pasar por un expansor.
4. Cuantificación vectorial: en lugar de cuantificar las muestras obtenidas individualmente,
se cuantifica por bloques de muestras. Cada bloque de muestras será tratado como si se
tratara de un vector, de ahí, el nombre de esta tipologia.
* Codificación
La codificación es el ultimo de los procesos que tiene lugar durante la conversión
analógico a digital. Consiste en la traducción de los valores de tensión eléctrica analógicos
que ya han sido cuantificados al sistema binario, mediante códigos preestablecidos. La
señal analógica va a quedar transformada en un tren de impulsos digital que no es más que
nada una sucesión de unos y ceros. La codificación que se realiza mediante el sistema
binario esta basada en el álgebra de boole.
En la figura 3.5 es posible observar como se ha obtenido una señal digital y el
código binario correspondiente a los niveles de voltaje que posee la señal analógica.
Figura 3.5 Codificación de la señal
En la tabla 3.1 se puede observar que utilizando solo tres bits por cada número en
código binario, se pueden representar ocho niveles o estados de cuantización.
Valor de la señal
Equivalente
analógica
en sistema
binario
0
000
2
010
3
011
4
100
6
110
7
111
7
111
5
101
4
100
3
011
0
000
Tabla 3.1 Equivalencias Decimal – Binario.
3.2.3 Errores en los Convertidores Analógicos/ Digital.
Un convertidor no es un circuito perfecto, si no que presenta una serie de errores
que se deben de tener en cuenta como son:
* Error de offset: es la diferencia entre el punto nominal de offset (cero) y el punto real de
offset. Concretamente, para un convertidor A/D este punto es el punto central de todos
aquellos valores de la entrada que nos proporcionan un cero en la salida digital del
convertidor. Este error afecta a todos los códigos de salida por igual, y puede ser
compensado por un proceso de ajuste.
Figura 3.6 Valor analógico de salida
*Error de cuantificación: es el error debido a la división en escalones de la señal de
entrada, de modo que para una serie de valores de entrada, la salida digital será siempre la
misma. Este valor se corresponde con el escalonado de la función de transferencia real,
frente a la ideal.
* Error de linealidad (linealidad integral): este error es la manifestación de la desviación
entre la curva de salida teórica y la real, de modo que para iguales incrementos en la
entrada, la salida indica distintos incrementos.
* Error de apertura: es el error debido a la variación de la señal de entrada mientras se esta
realizando la conversión. Este error es uno de los más importantes cuando se están
muestreando señales alternas de una frecuencia algo elevada (por ejemplo muestra de voz)
pero tiene poca importancia cuando medimos señales casi continuas, como temperatura
presión, o nivel de líquidos. Para minimizar este tipo de error se usan los circuitos de
muestreo y retención. Este error es importante, ya que si no lo tenemos en cuenta raramente
podemos digitalizar adecuadamente señales alternas.
Si consideramos un error que no afecte a la precisión total de la conversión, la frecuencia
máxima de muestreo deberá ser:
F max
1
Ta * * 2 n 1
(3.4)
En esta formula Ta es el tiempo de apertura del circuito de muestreo y retención. El
circuito de muestreo puede estar a veces integrado dentro de la misma cápsula del
convertidor, lo que nos puede facilitar el diseño enormemente.
3.2.4 Etapa de Acondicionamiento de la Señal
El acondicionamiento de la señal consta de las siguientes etapas:
1. Amplificación
4. Multiplexado
2. Excitación
5. Aislamiento
3. Filtrado
6. Linealización
1. Amplificación: es el tipo más común de acondicionamiento. Para conseguir la mayor
precisión posible la señal de entrada debe ser amplificada de modo que su máximo nivel
coincida con la máxima tensión que el convertidor pueda leer.
2. Excitación: la etapa de acondicionamiento de señal a veces genera excitación para
algunos transductores, como por ejemplo las galgas extesometricas, termistores o RTD, que
necesitan de la misma, bien por su constitución interna (como el termistor, que es una
resistencia variable con la temperatura) o bien por la configuración en que se conectan
(como el caso de las galgas que se suelen montar en un puente de wheatstone).
3. Filtrado: el fin del filtro es eliminar las señales no deseadas de la señal que estamos
observando. Por ejemplo, en las señales casi continuas (como la temperatura) se usa un
filtro de ruido de unos 4Hz, que eliminara interferencias, incluidos los 50/60 Hz de la red
eléctrica.
4. Multiplexado: es la conmutación de las entradas del convertidor, de modo que con un
solo convertidor podemos medir los datos de diferentes canales de entrada. Puesto que el
mismo convertidor esta midiendo diferentes canales, su frecuencia máxima de conversión
será la original dividida por el número de canales muestreados.
Las señales alternas, tales como la vibración, necesitan un tipo distinto de filtro,
conocido como filtro antialiasing, que es un filtro pasabajo pero con un corte muy brusco,
que elimina totalmente las señales de mayor frecuencia que la máxima a medir, ya que si no
se eliminasen aparecerían superpuestas a la señal medida, con el consiguiente error
5. Aislamiento: otra aplicación habitual en el acondicionamiento de la señal es el
aislamiento eléctrico entre el transductor y el ordenador, para proteger al mismo de
transitorios de alta tensión que puedan dañarlo. Un motivo adicional para usar aislamiento
es garantizar que las lecturas del convertidor no sean afectadas por diferencias en el
potencial de masa o por tensiones en modo común.
Cuando el sistema de adquisición y la señal a medir están ambas referidas a masa pueden
aparecer problemas si hay una diferencia de potencial entre ambas masas, apareciendo un
bucle de masa que puede devolver resultados erróneos.
6. Linealización: muchos transductores, como los termopares, presentan una respuesta no
lineal ante cambios lineales en los parámetros que están siendo medidos. Aunque la
linealizacion puede realizarse mediante métodos numéricos en el sistema de adquisición de
datos, suele ser una buena idea el hacer esta corrección mediante circuiteria externa.
3.3 TIPOS DE CONVERTIDORES A/D
Una primera clasificación de los ADC es como se muestra a continuación:
ESCALERA
REALIMENTADOS
SEGUIMIENTO
APROXIMACIONES SUCESIVAS
A
D
C
INTEGRADORES
UNA RAMPA
DOBLE RAMPA
TENSION
FRECUENCIA
PARALELO
FLASH
3.3.1 Convertidor de Aproximaciones Sucesivas
Es el empleado comúnmente, apto para aplicaciones que no necesitan grandes
resoluciones ni velocidades. Debido a su bajo costo se suele integrar en la mayoría de
microcontroladores permitiendo una solución de bajo costo en único chip para numerosas
aplicaciones de control.
Tiene una circuiteria mas compleja que el que el ADC de rampa digital, pero un
tiempo de conversión mas pequeño. Además los convertidores de aproximaciones sucesivas
(CAS) tienen un tiempo fijo de conversión que no depende del valor de la señal analógica.
La configuración básica del ADC de aproximaciones sucesivas es mostrada en la
figura 3.7, que a comparación al de rampa digital es que no utiliza un contador para generar
la entrada al DAC si no que emplea un registro. La lógica de control modifica bit por bit el
contenido del registro hasta que el contenido de este se convierte en el equivalente digital
de la entrada analógica VA dentro de la resolución del convertidor.
Figura 3.7 Diagrama a bloques del ADC de aproximaciones sucesivas
3.3.2 Convertidor Flash
Este convertidor se destaca por su elevada velocidad de funcionamiento y esta
formado por una cadena de divisores de tensión y comparadores, realizando la conversión
de manera inmediata en una única operación. Su principal desventaja es su elevado costo.
3.3.3 Convertidor A/D con Comparadores
Es el único caso en que los procesos de cuantificación y codificación están
claramente separados. El primer paso se lleva acabo mediante comparadores que
discriminan entre un numero finito de niveles de tensión. Estos comparadores reciben en
sus entradas la señal analógica de entrada junto con una tensión de referencia, distinta para
cada uno de ellos. Al estar las tensiones de referencia escalonadas, es posible conocer si la
señal de entrada esta por encima o por debajo de cada uno de ellas, lo cual permitirá
conocer el estado que le corresponde como resultado de la cuantificación. A continuación
será necesario un codificador que nos entregue la salida digital.
Figura 3.8 Convertidor A/D con comparadores
Este convertidor es de alta velocidad, ya que el proceso de conversión es directo en
lugar de secuencial, reduciendo el tiempo de conversión necesario a la suma de los de
propagación en el comparador y el codificador. Sin embargo, su utilidad queda reducida a
los casos de baja resolución, dado que para tener una salida de N bits son necesarios 2N-1
comparadores, lo que lleva a una complejidad y encarecimiento excesivo en cuanto se
desee obtener una resolución alta.
3.3.4 Convertidor A/D con Contadores
Llamado también convertidor con rampa en escalera. Usa el circuito más sencillo de
los convertidores A/D y consta básicamente de los elementos reflejados en la figura 3.9.
Figura 3.9 Comparador, reloj, circuito de muestreo y retención (s&h), contador,
convertidor D/A y buffers de salida.
Una vez que el circuito de muestreo y retención (S/H), ha muestreado la señal
analógica, el contador comienza a funcionar contando los impulsos procedentes del reloj. El
resultado de este conteo se transforma en una señal analógica mediante un convertidor
D/A, proporcional al número de impulsos de reloj recibidos hasta este instante.
La señal analógica obtenida se introduce al comparador en el que se efectúa una
comparación entre la señal de entrada y la señal digital convertida en analógica. En el
momento en que esta ultima alcanza el mismo valor que la señal de entrada, el comparador
bascula su salida y se produce el paro del contador. El valor del contador pasa a los buffers
y se convierte en la salida digital correspondiente a la señal de entrada.
Pero este convertidor tiene dos inconvenientes:
1. Escasa velocidad
2. Tiempo de conversión variable.
3.3.5 Convertidor A/D con Integrador
Este tipo de convertidores son mas sencillos que los anteriores ya que no utilizan
convertidores D/A. Se emplean en aquellos casos en los que no se requieren una gran
velocidad, pero en los que es importante conseguir una buena linealidad. Son muy usados
en los voltímetros digitales. Existen dos tipos:
1.-Una rampa
2.-Doble rampa.
3.3.6 ADC de Doble Pendiente
El convertidor de doble pendiente es uno de los que tienen mayor tiempo de
conversión (por lo general de 10 a 100ms), pero ofrece la ventaja de un costo relativamente
bajo ya que no requiere de componentes de precisión tales como un DAC o un VCO. La
operación básica de este convertidor se apoya en la carga y la descarga, ambas en forma
lineal, de un capacitor del uso de corrientes de valor constante. El primer paso consiste en
cargar el capacitor durante un intervalo de tiempo fijo con una corriente que se obtiene del
voltaje analógico de entrada VA. De este modo al final del intervalo de tiempo, el voltaje en
el capacitor es proporcional a VA. En este momento el capacitor se descarga, también de
manera lineal, con ayuda de una corriente que se obtiene de una fuente de voltaje de
precisión que sirve como referencia VREF. El proceso de descarga lineal termina cuando el
voltaje a través del capacitor es cero. Durante el intervalo de descarga, se envía una
frecuencia digital de referencia hacia un contador. La duración del intervalo de descarga es
proporcional al voltaje inicial del capacitor. Es así como al final del intervalo de descarga,
el contador tiene en cuenta que es proporcional al voltaje inicial del capacitor que, como
indicamos, es proporcional a VA.
Además de su bajo costo, otra ventaja del ADC de doble pendiente es su baja
sensibilidad al ruido y a las variaciones en los valores de sus componentes causados por los
cambios de temperatura. Debido al tiempo de conversión tan grande, el ADC de doble
pendiente no se emplea en ninguna aplicación de adquisición de datos. Sin embargo, esta
característica no representa un problema en aplicaciones tales como los voltímetros o
multímetros digitales, que es su campo más importante de aplicación.
3.3.7 ADC de Voltaje a Frecuencia
El ADC de voltaje a frecuencia es más sencillo que los otros ADC, debido a que no
hace uso de un DAC. En lugar de este, emplea un oscilador lineal controlado por voltaje
(VCO) que produce como salida una frecuencia que es proporcional al voltaje aplicado a su
entrada. En este caso, el voltaje analógico que se desea convertir se conecta a la entrada del
VCO para generar una frecuencia de salida. Esta frecuencia se envía a un contador, que
cuenta durante un intervalo de tiempo fijo. El conteo final es proporcional al valor del
voltaje analógico.
Para ilustrar lo anterior, suponga que el VCO genera una frecuencia de 10kHz por
cada volt de entrada (esto es, 1Vproduce 10kHz, 1.5V produce 15kHz, 2.73V producen
27.3 kHz). Si el voltaje analógico de entrada es de 4.54 V, entonces la salida del VCO es de
45.4 kHz; esta salida se envía a un contador durante 10ms, por ejemplo. Después de dicho
lapso, el contador tendrá una cuenta de 454, que es la representación digital de 4.54V.
Aunque este método de conversión es muy sencillo, resulta difícil alcanzar un alto
grado de exactitud dada la dificultad de diseñar VCO’s con una exactitud mayor que 0.1%.
Una de las principales aplicaciones de este tipo de convertidor se encuentra en ambientes
industriales con mucho ruido y donde se tienen que trasmitir señales analógicas de poca
amplitud desde los circuitos transductores hasta la computadora de control. Estas señales se
pueden ver afectadas de manera drástica por el ruido si son transmitidos de manera directa
hacia la computadora. Un mejor enfoque es alimentar la señal analógica hacia un VCO, que
genera una señal digital cuya frecuencia cambia de acuerdo con la entrada analógica. Esta
señal digital es la que se trasmite hacia la computadora y los efectos que tiene el ruido
sobre ella son mucho menores. La circuiteria de la computadora de control cuenta los
pulsos (esto es, realiza una función de conteo de frecuencia) para producir un valor digital
equivalente a la entrada analógica original.
3.4 EL ADC 0804
El ADC0804 es un dispositivo electrónico capaz de convertir un voltaje determinado
en un valor binario, en otras palabras, este se encarga de transformar señales análogas a
digitales. Poseen dos señales de entrada llamadas Vref+ y Vref- y determinan el rango en el
cual se convertirá una señal de entrada.
El dispositivo establece una relación entre su entrada (señal analógica) y su salida
(Digital) dependiendo de su resolución. Esta resolución se puede saber, siempre y cuando
conozcamos el valor máximo que la entrada de información utiliza y la cantidad máxima de
la salida en dígitos binarios. A manera de ejemplo, el convertidor análogo digital ADC0804
tiene la capacidad de convertir una muestra analógica de entre 0 y 5 voltios y su resolución
es:
Resolución = valor analógico / (2^8)-1
Resolución = 5 V / 255
Resolución = 0.0196v o 19.6mv.
Lo anterior quiere decir que por cada 19.6 milivoltios que aumente el nivel de
tensión entre las entradas nomencladas como "Vref+" y "Vref-" que ofician de entrada al
convertidor, éste aumentará en una unidad su salida (siempre sumando en forma binaria bit
a bit). Por ejemplo:
0 V - 00000000
0.02 V - 00000001
0.04 V - 00000010
1 V - 00110011
5 V – 11111111
3.4.1 Aplicaciones y Características Generales del ADC0804
Algunas aplicaciones
1. Termómetro digital
2. Termostato digitalmente controlado.
3. Monitoreo y sistemas de control basados con un microprocesador
4. Es un interfaz entre un transductor y el microprocesador
Características generales
1. El ADC0804 es compatible con muchos microprocesadores
2. El ADC0804 tiene entradas diferenciales
3. Contiene 3 estados de salida
4. Niveles lógicos compatibles con TTL y MOS.
5. Puede ser usado con reloj interno o externo.
6. Necesita solamente 5V
7. Garantizado para trabajar con 1MHz de reloj
3.4.2 Configuración del ADC0804
Figura 3.10 Esquema general del ADC0804
1. Tiene dos entradas analógicas: VIN (+) y
VIN (-) que permite tener entradas
diferenciales. En otras palabras el voltaje real de entrada VIN es la diferencia entre los
voltajes aplicados en dichas terminales [VIN analógico =VIN (+)-VIN (-)]. En mediciones
echas en un solo punto, la entrada analógica se aplica en VIN (+) mientras que VIN (-) se
conecta a la tierra analógica.
Durante la operación normal, el convertidor utiliza VCC =+5V como voltaje de referencia
y la entrada analógica puede variar desde 0 a 5V, que es el valor de escala completa.
2. Convierte el voltaje analógico de entrada en una salida digital de 8 bits. La salida es de
tres estados, lo que permite conectar el convertidor con facilidad en canales de datos. Con 8
bits de resolución es de 5V/255=19.6mV.
3. Tiene un circuito de reloj interno que produce una frecuencia igual con f =1/(1.1RC), don
de R y C son los valores de los componentes conectados al convertidor de manera externa.
Una frecuencia típica de reloj es 606 kHz y se obtiene con R = 10k y C=150pF. Si se desea
también puede utilizarse un reloj externo; este se conecta a la terminal CLK IN del CI.
4. Tiene conexiones a tierra por separados para los voltajes analógicos y digitales. La
terminal ocho corresponde a la tierra analógica y se conecta al punto común que sirve como
referencia en el circuito analógico que genera el voltaje analógico. La terminal 10 es la
tierra digital, que es la que utilizan todos los dispositivos digitales que integran el sistema.
La tierra digital es inherentemente ruidosa como consecuencia de los rápidos cambios de
corriente que tienen su origen cuando los dispositivos digitales cambian de estado. Aunque
no es necesario utilizar una tierra analógica aparte, hacerlo asegura que el ruido de la tierra
digital no sea la causa de un cambio prematuro en la salida del comparador analógico que
se encuentra dentro del ADC.
Este CI esta
diseñado para ser conectado con facilidad al canal de datos de un
microprocesador. Por esta razón, los nombres de algunas entradas y salidas del ADC0804
tienen su origen en las funciones que son comunes en los sistemas basados en un
microprocesador.
* Funciones de entradas y salidas
a) CS habilitación del microcircuito (chip select).- esta entrada debe encontrarse en su
estado activo BAJO para que las entradas (RD) o (WR) tengan efecto.
b) RD habilitación de salida (output enable).- esta entrada se emplea para habilitar los
buffers de las salidas digitales.
c) WR inicio de conversión (Start conversión).- en esta entrada se aplica un pulso bajo para
dar inicio a un nuevo proceso de conversión.
d) INTR fin de conversión (end of conversión).- esta señal cambia hacia el estado ALTO al
inicio de la conversión cuando la conversión termina, regresa al estado BAJO.
e) Salida de reloj (CLK OUT).-para utilizar el reloj interno, se conecta un resistor en esta
terminal. La señal del reloj interno aparece en esta terminal.
f) Entrada de reloj (CLK IN).- se utiliza como entrada de reloj externo o para conectar un
capacitor cuando se hace uso del reloj interno.
3.4.3 Diagrama a Bloques del ADC0804
3.5 CONVERTIDOR DIGITAL-ANALOGICO
Cuando un circuito digital requiere procesar información debe estar dotado de dos
interfaces o circuitos de entrada y salida: uno para convertir la señal analógica a digital
(interfase de entrada) y otro para convertir la señal digital (interfase de salida), como
podemos verlo en la figura 3.12.
Convertidor
A/D
Circuito
Digital
Convertidor
D/A
Figura 3.12 Diagrama de bloques del proceso de conversión digital-analógico
A los circuitos que convierten las señales digitales a analógica se les llama
convertidores digitales /analógicos o de manera abreviada, convertidores D/A o DAC
(Digital to analog Converters).
3.5.1 Clasificación de los Convertidores Digital- Analógico
Los convertidores digital-analógicos se pueden clasificar según la forma en que se
aplica la información digital a su entrada.
Serie
Convertidores
digital- analógico
Paralelo
Conversión simultanea
o
Directa
Conversión secuencial o
Indirecta
3.5.2 Convertidores Seriales
Son aquellos en los que la combinación a convertir se aplica a través de un único
terminal en el que aparecen en secuencia los diferentes bits que lo constituyen. Su
diagrama de bloques esta representado en la figura 3.13.
Figura 3.13 Diagrama general de un convertidor serie
El circuito de conversión serie resulta mas complejo que el de conversión en
paralelo. Ello unido a que la mayoría de los procesadores digitales, en particular los
programables, proporcionan a su salida un cierto número de bits en paralelo, a hecho que
los convertidores serie no sean muy utilizados.
3.5.3 Convertidores Paralelo
Son aquellos en los que la combinación binaria a convertir se aplica en paralelo a su
entrada.
Figura 3.14 Diagrama general de un convertidor paralelo.
Proporcionan a la salida una tensión o corriente cuyo valor es igual al número
decimal equivalente al binario aplicado a su entrada.
Los convertidores paralelos pueden a su vez clasificarse en dos clases de acuerdo
con la forma en que se realiza la conversión:
a) convertidores de conversión simultánea o directa.
La información digital se convierte de manera directa analógica sin realizar ningún paso
intermedio.
b) convertidores digital-analógicos de conversión secuencial o indirecta.
En estos convertidores la conversión digital se convierte en una secuencia de
impulsos que, a su vez, se transforma en una señal analógica. Estos convertidores son más
lentos, es decir, poseen un mayor tiempo de conversión. Por ello el progreso de la
microelectrónica ha hecho que estos métodos se hayan dejado de utilizar en la práctica.
3.5.4 Aplicaciones de un DAC
Los DAC se usan cuando la salida de un circuito digital debe proporcionar un
voltaje o corriente analógica para
excitar un dispositivo analógico. Algunas de las
aplicaciones más comunes son los que se mencionan a continuación.
* Control: la salida digital de una computadora se puede convertir a una señal analógica de
control para ajustar la velocidad de un motor o la temperatura de un horno, o para controlar
casi cualquier variable física.
* Pruebas automáticas: las computadoras se pueden programar con el fin de generar las
señales analógicas (mediante un DAC) necesarias para probar circuiteria analógica. La
respuesta de salida analógica del circuito de prueba por lo general se convierte a un valor
digital por medio de un ADC y se alimenta a la computadora para su almacenamiento,
visualización y a veces análisis.
* Reconstrucción de la señal: en muchas aplicaciones se digitaliza una señal analógica; es
decir varios puntos en la señal se convierten a sus equivalentes digitales y se almacenan en
memoria. Esta conversión se lleva a cabo mediante un convertidor analógico-digital
(ADC). Luego se puede usar un DAC para convertir los datos digitalizados almacenados de
regreso a analógico-un punto a la vez- y así se reconstruye la señal original. Esta
combinación de digitalización y reconstrucción se usa en osciloscopios de almacenamiento
digital, sistema de audio de discos compactos y grabación digital de audio y video.
3.5.5 Características de Funcionamiento de un DAC
Las características reales de un convertidor difieren a las ideales debido a las
imperfecciones de los componentes que lo constituyen. Las características de
funcionamiento se definen como entre diferencias entre el comportamiento real y el ideal
de un convertidor.
En la figura 3.15 se representa la característica ideal de un convertidor digitalanalógico unipolar en el que se supone que utiliza el código binario natural. El paso de una
combinación binaria a la siguiente supone un incremento de la variable analógica de salida
en un valor igual a la resolución. La relación entre los códigos de entrada y los valores de
salida esta constituida por una escalera cuyos vértices superiores forman una línea que
constituye la bisectriz del primer cuadrante.
Figura 3.15 Característica ideal de un convertidor digital-analógico unipolar
En la figura 3.16 se representa la característica de un convertidor digital analógico
bipolar ideal, en el que el código utilizado es el binario natural con bit de signo y valor
absoluto.
La imperfección de los componentes utilizados en la construcción del convertidor
da lugar a diferencias entre esta característica ideal y la real.
Figura 3.16 Característica ideal de un convertidor digital-analógico bipolar
* Error de Asimetría (Offset)
La imperfección de los amplificadores operacionales utilizados en la construcción
del convertidor hace que, cuando en la entrada de este se aplique la combinación nula, el
valor de la variable analógica de salida no sea nulo. Al valor de dicha variable en las
citadas circunstancias se le suele denominar error de asimetría (offset) por que es debido a
la tensión de asimetría de los amplificadores operacionales y representa un desplazamiento
de la característica real con respecto a la ideal, tal como se representa en la figura 3.17.
Figura 3.17 Características de un convertidor digital-analógico con error de asimetría
* Error de Ganancia
Este error recibe también el nombre de error de escala y se representa de forma
grafica en la figura 3.18. La característica real corresponde a una recta que pasa por el
origen pero no coincide con la bisectriz de primer cuadrante. Puede ser especialmente
debido a errores en la tensión de referencia y se puede corregir mediante un ajuste de
ganancia del amplificador operacional utilizado a la salida del convertidor.
Figura 3.18 Característica de un convertidor digital-analógico con error de ganancia
* Error de linealidad
Se produce este error cuando la característica que une a los extremos de la escalera
que indica gráficamente la conversión no forma una línea recta. Se presenta en la figura
3.19. Es debido a que los incrementos de la variable analógica de salida no son idénticos
para todos los cambios entre combinaciones sucesivas del código de entrada.
Se define también la no linealidad diferencial como la diferencia entre el valor de
la resolución ΔV y la máxima variación entre dos combinaciones sucesivas.
La no linealidad del convertidor puede incluir también la falta de monotonicidad.
Se dice que el convertidor digital analógico es monótono cuando la aparición de su entrada
de combinaciones binarias crecientes produce siempre incrementos positivos de la variable
analógica de salida; en este caso la pendiente de la curva característica es siempre positiva.
En caso contrario cuando la curva característica presente zonas de pendiente negativa el
convertidor no es monótono.
Una de las principales causas de no linealidad es la diferencia entre el valor ideal y
real, debido a la falta de precisión de las resistencias del sumador resistivo.
Figura 3.19 Característica de un convertidor digital-analógico con error de linealidad.
3.5.6 Código de Entrada BCD para el DAC
Los DAC’s normalmente hacen uso de un código binario de entrada. Muchos
DAC’s utilizan un código de entrada BCD donde se emplean grupos de códigos de cuatro
bits para cada digito decimal. La figura 3.20 muestra el diagrama de un convertidor de ocho
bits (dos dígitos) de este tipo. Cada grupo de código de cuatro bits puede variar de 0000 a
1001, de manera que las entradas BCD representan cualquier número decimal de 00 a 99.
Dentro de cada grupo de códigos los factores de ponderación de los diferentes bits se
proporcionan igual que el código binario (1,2, 4,8), pero los factores de ponderación
relativos para cada grupo son diferentes por un factor de 10.
Figura 3.20 DAC que emplea código de entrada BCD. Este convertidor acepta una entrada de dos
dígitos y genera como salida 100 posibles valores analógicos.
En esta figura se muestran los factores de ponderación relativos para cada uno de los
diferentes bits. Obsérvese que los bits que forman el código BCD para el digito más
significativo (MSB) tienen un factor de ponderación que es 10 veces mayor que el
correspondiente a los bits del LSB.
3.5.7 Parámetros de los Convertidores DAC
Un DAC tiene varios parámetros que deben considerarse en el momento de una
selección para una aplicación determinada, cuatro son las más importantes y son:
Resolución
Tiempo de estabilización
Exactitud
Tiempo de conversión
* Resolución
La resolución de un DAC esta dada por el número de niveles de voltaje análogo que
es capaz de generar. Este parámetro esta relacionado directamente con el número de bits de
entrada que conforman una palabra binaria, un convertidor D/A de cuatro bits tiene una
resolución de 4. El numero de niveles de voltaje (análogo) que es capaz de generar es de
2 N 24 16 .
Lo anterior significa que la salida análoga debe de estar representada por 16 niveles
de voltaje. Un DAC de 8 bits proporciona 256 niveles diferentes de voltaje. Un DAC de 12
bits puede entregar hasta 4096 niveles de voltaje análogo. En general, cuantos más bits
tenga un convertidor D/A, mas exactitud se lograra en la salida análoga. El concepto de
resolución se ilustra en la siguiente figura:
Figura 3.21 Resolución de un DAC
* Tiempo de estabilización
La velocidad de operación de un DAC por lo general se especifica dando su tiempo
de establecimiento, el cual es el tiempo requerido para que la salida del DAC pase de cero a
límite de escala cuando la entrada binaria se cambia de ceros a unos. En realidad el tiempo
de establecimiento se mide como el tiempo que le toma al DAC estabilizarse dentro de ±1/2
del tamaño del escalón (resolución) de su valor final. Por ejemplo si un DAC tiene una
resolución de 10mV, el tiempo de establecimiento se mide como el tiempo que le toma a la
salida estabilizarse dentro de 5mV de su valor a plena escala.
Los valores típicos para el tiempo de su establecimiento varían de 50ns a 10 µs.
Hablando en términos generales los DAC con salida de corriente tendrán tiempos de
establecimiento menores que los que tienen salida de voltaje. Por ejemplo el DAC 1280
puede operar como salida de corriente o salida de voltaje. En el modo de salida de corriente
su tiempo de establecimiento es 300ns; en el modo de voltaje la salida su tiempo de
establecimiento es 2.5 µs. la razón principal de esta diferencia es el tiempo de respuesta del
amplificador operacional que se usa como convertidor de corriente a voltaje.
* Exactitud
La exactitud se define como la variación positiva o negativa, desde la mitad (1/2)
hasta 2 veces el valor de un LSB. Por ejemplo, para un DAC con una exactitud de 1 LSB, el
voltaje de salida análogo puede variar tanto como el valor equivalente a un BIT.
Si el DAC tiene una salida entre 0V y 5V y 12 bits de resolución, el valor del LSB
es 5V/212= 5V/4096, es decir 0.00122 V. Para cualquier entrada binaria, el voltaje de salida
puede ser mayor o menor que el valor esperado en una cantidad igual a 0.00122V. Si el
mismo DAC tiene una exactitud de +/- ½ LSB. La salida se puede desviar en una cantidad
igual a +/- 0.00061 V.
Por lo tanto cuanto menor sea el valor de la exactitud, más fielmente la salida
análoga corresponderá a la que se espera.
* Tiempo de conversión
Es el tiempo que transcurre desde que una combinación binaria aparece a la entrada
del convertidor hasta que su variable analógica de salida adquiere el nivel
que le
corresponde, con una diferencia no superior a la resolución. Naturalmente, el tiempo de
conversión depende del escalón de variación de la variable analógica que se produce al
cambiar la combinación digital de entrada. Por ello el tiempo de conversión se define para
el caso mas desfavorable en que la excursión de la variable analógica es máxima.
El inverso del tiempo de conversión expresa la frecuencia máxima de conversión
definida como el máximo numero de conversiones por unidad de tiempo.
3.6 TIPOS DE CONVERTIDORES D/A
*Convertidor D/A usando escala binaria de resistencias.
La técnica de utilizar una escala binaria de resistencias es uno de los métodos más
antiguos y simples para convertir métodos binarios o bits en una señal análoga. En la figura
3.22 podemos ver el circuito básico de un convertidor D/A de 4 bits, el cual consta de un
sumador análogo con amplificador operacional, un registro de almacenamiento y un juego
de interruptores.
Figura 3.22 Convertidor D/A de 4 bits
El amplificador/sumador posee tantas entradas como bits tiene la palabra binaria
que se quiere convertir (4, en este caso). El registro memoriza la señal digital de entrada y
sus salidas comandan la apertura y cierre de los interruptores análogos. Un 0 aplicado a la
entrada de control de cada interruptor lo abre y un 1 lo cierra.
Cuando se almacena en el registro de entrada un 0000 binario, todos los
interruptores análogos se abren. En estas condiciones, no hay voltaje aplicado a la entrada
de las resistencias del amplificador/sumador. Por consiguiente, el voltaje de salida de este
último es igual a 0V.
Cuando se aplica un 0001, el interruptor S1 se cierra. Esto provoca que se apliquen 10V a la resistencia R1 puesto que la entrada (-) del amplificador operacional es una tierra
virtual, efectivamente hay -10 V sobre la resistencia de 8K.
Como resultado, a través de la resistencia de realimentación (Rf= 800ohms) circula
una corriente de 10V/8K ohms, es decir de 1.25 mA. Aplicando la Ley de Ohm, el voltaje
de la resistencia Rf debe ser, por tanto, igual a 800X1.25mA, es decir 1V. Cuando la
palabra binaria de entrada cambia a 0010, se abre el interruptor S1 y se cierra el interruptor
S2. Esto causa una corriente de 2.5 mA (10V/4K ohms) que fluya por R2 y Rf. El voltaje
a través de Rf es, ahora, 800 ohms X 2.5 mA=2V.
De igual manera una palabra binaria igual a 0100 generara 4V en la salida y la palabra
binaria 1000 causara 8 V de salida.
Observe como los valores de las resistencias de entrada y salida se seleccionan
cuidadosamente para generar una progresión binaria (16, 8, 4, 2,1). Los interruptores deben
operarse en todas las combinaciones para lograr una salida análoga desde 0 hasta 15 y en
incrementos de 1V (0000=0V, 0001=1V,…,0111=7V, 1111=15V), como lo ilustra la
figura 3.23.
Figura 3.23 Conversión D/A
Aunque el tipo de convertidor digital-analógico es muy sencillo, no es práctico
cuando se usan palabras binarias de más de 4 bits, ya que la cantidad de resistencias
requeridas para obtener la progresión regresiva es muy grande. El DAC que usa una red de
resistencias en escalera (ladder), utiliza únicamente dos valores normalizados de
resistencias.
*Convertidor D/A usando resistencias conectadas en escalera.
Esta emplea una red de resistencias en escalera (ladder) conocida como red “R-2R”
y se aprecia en la figura 3.24(a) donde podemos ver el principio de funcionamiento de esta
red.
La figura mencionada nos muestra dos resistencias de valor 2R conectadas en
paralelo. Ya que ellas son iguales, cualquier corriente que entre por el nodos A, se dividirá
en dos partes iguales. Además, como son iguales, pueden ser remplazadas por una sola
resistencia de valor R.
Figura 3.24 a) Red “R-2R”
Ahora al ver la figura 3.24 (b), veremos que las dos resistencias de valor 2R de la
derecha tienen una resistencia equivalente de valor igual a R. Esta resistencia equivalente se
encuentra en serie con otra resistencia de R+R=2R entre el punto B y tierra.
Figura 3.24 b) Red “R-2R” equivalente
Ahora el punto B, de esta figura presenta la misma situación del punto A de la
figura 3.24 (a), esto es, dos resistencias a tierra, cada una de valor igual 2R. Por la razón
anterior, cualquier corriente que entre por el nodo B se divide, en este nodo, en dos partes
iguales y además, la resistencia que hay entre B y tierra es de valor R.
En la figura 3.25 podemos ver un circuito de un DAC con red R-2R que hace uso
del principio anterior. La fuente de referencia (Vref) observa una resistencia de valor R
(equivalente a toda la red R-2R) conectada a tierra y por consiguiente emite una corriente
de entrada Iin igual Vref/R.
Figura 3.25 DAC con red R-2R
La corriente Iin se divide en dos partes iguales: una que circula por la primera
resistencia de valor 2R y otra que se dirige hacia el interior de la red. En el siguiente nodo
de la red sucede lo mismo, es decir la mitad de la corriente se encamina a tierra por la
resistencia 2R y lo que resta se interna más en la red. Como resultado el conjunto de
resistencias 2R tiene corrientes de valores iguales a ½ Iin, ¼ Iin, 1/8 Iin, 1/16 Iin, etc.
Cada uno de los interruptores conectados a la entrada de la red R-2R simula un BIT
en las entradas digitales al convertidor. Cuando el bit es 0 el interruptor correspondiente
lleva la corriente que circula por la resistencia 2R a tierra. Cuando el bit es 1, la enruta a la
entrada de suma del amplificador.
Para un convertidor de este tipo (DAC R-2R) de 4 bits, la corriente que entra al
punto de suma del amplificador operacional (Iin) puede evaluarse analíticamente mediante
la siguiente expresión:
lin linX 1 / 2B3 1 / 4B2 1 / 8B1 1 / 16B0
(3.5)
Las letras B3, B2, B1 y B0 representan los valores binarios (0 y 1) de la señal digital
de entrada. La corriente que resulta, para cada palabra binaria se multiplica por la
resistencia de realimentación Rf y se obtiene el voltaje de salida del convertidor.
Figura 3.26 Estructura interna del DAC de 4 bits
En la figura 3.26 podemos ver la estructura interna de un DAC de cuatro bits. El
registro de almacenamiento se utiliza para memorizar la palabra digital que se desea
convertir y además como excitación de los interruptores electrónicos de alta velocidad que
conmutan las corrientes de la red R-2R. La palabra binaria 0000, por ejemplo, abre todos
los interruptores y, por tanto, coloca 0V en la salida del convertidor. Del mismo modo 1000
cierra el interruptor S1 y produce 5V; 0100 cierra S2 y produce 2.5V; 0010 cierra S3 y
produce 1.25V; 0001 cierra S4 y produce 0.625V; etc. Note que la salida corresponde a una
progresión binaria. Lo anterior permite a la salida variar entre 0 y 10V en incrementos de
0.625V; la gran ventaja de este tipo de DAC con dos valores de resistencias (R y 2R) es que
organiza todo el proceso de conversión. La simplicidad del circuito permite construir
DAC’s integrados de buena exactitud y bajo costo.
3.7 EL DAC 0808
El DAC0808 es un convertidor de digital a análogo monolítico de 8bits, este ofrece
una escala que coloca una corriente completa en la salida en 150ns, mientras que disipa
solamente 33mW con las fuentes de ± 5V.
DAC0808
Figura 3.27 DAC0808
Numero de
Descripción
PIN
1
NC: no conecta
2
GND: tierra
3
Vee: voltaje negativo
4
Iout: Corriente de salida
5
A1: entrada digital, Bit 1
6
A2: entrada digital, Bit 2.
7
A3: entrada digital, Bit 3.
8
A4: entrada digital, Bit 4.
9
A5: entrada digital, Bit 5.
10
A6: entrada digital, Bit 6.
11
A7: entrada digital, Bit 7.
12
A8: entrada digital, Bit 8.
13
Vcc: Voltaje positivo.
14
Vref+ :Voltaje de
referencia +
15
Vref- : Voltaje de
referencia -
16
COMP: compensación.
Tabla 3.5 Descripción de Pines DAC0808.
No se requiere ningún ajuste actual de la referencia (IREF) para la mayoría de los
usos, puesto que la corriente de salida a escala completa es típicamente ±1 LSB de
255(IREF/256).
Las exactitudes relativas son de ±0.19% y aseguran 8 bits y linealidades, mientras
que la corriente de salida a un nivel cero es menos de 4μA, lo que a su vez proporciona la
exactitud de 8bits para IREF ≤ 2mA. Esta es la corriente máxima, dictaminada por la fuente
de voltaje de 10V a través del resistor de 5KΩ conectado al pin 14, como se ilustra en el
diagrama de conexiones de la figura 3.28. Las corrientes de la fuente de alimentación del
DAC0808 son independientes de los bits y exhiben esencialmente características constantes
del dispositivo sobre la escala entera del voltaje de la fuente.
Figura 3.28 Diagrama de conexiones del DAC0808.
3.7.1 Estructura Interna del DAC0808
El DAC0808 se interconectara con los niveles de la lógica popular del TTL, del
DTL o el CMOS, y es un reemplazo directo para MC1508/MC1408, si se requiere utilizar
para rangos mas altos de la velocidad es convenirte verificar la hoja de datos del DAC800.
Figura 3.29 Estructura interna DAC0808
El DAC 0808 esta compuesto de una red de resistencias R-2R, el voltaje aplicado a
estas resistencias se puede alterar externamente por medio de los terminales Vref(+) pin14
y Vref(-)pin 15. El DAC entrega, por el pin14 una corriente Iin. Para convertir este
componente a voltaje hay que colocar en la salida un sistema apropiado, por ejemplo de un
amplificador operacional o una resistencia.
Puede alimentarse con fuentes duales desde +/-5V hasta +/-18V.
3.7.2 Características Generales del DAC0808
Características eléctricas
Vcc: +18Vdc
Vee: -18Vdc
Voltaje digital de entrada, V5-V12: -10Vdc a +18Vdc
Voltaje de salida aplicado, Vo: -11Vdc a +18Vdc
Corriente de referencia, I14: 5mA
Entradas de amplificación de referencia, V14, V15 Vcc, Vee
Poder de disipación: 1000mW
Rango de temperatura: -65 ºC a +150 ºC
Capitulo 4
SENSORES DE TEMPERATURA
4.1 INTRODUCCION
La temperatura es un estado relativo del ambiente, de un fluido o de un material
referido a un valor patrón definido por el hombre, un valor comparativo de uno de los
estados de la materia. por otra parte, si , positivamente podemos definir los efectos que los
cambios de temperatura producen sobre la materia, tales como los aumentos o disminución
de la velocidad de las moléculas de ella, con consecuencia palpable, tales como el aumento
o disminución del volumen de esa porción de materia o posibles cambios de estado.
Existen dos escalas de temperatura o dos formas de expresar el estado relativo de la
materia, estas son:
Temperaturas absolutas
Temperaturas relativas
Las escalas absolutas expresan
la temperatura de tal forma que su valor cero, es
equivalente al estado ideal de las moléculas de esa porción de materia en estado estático o
con energía cinética nula. Las escalas relativas, son aquellas que se refieren a los valores
preestablecidos o patrones en base los cuales fue establecida una escala de uso común.
En sistema métrico decimal. Las escalas relativas y absolutas son:
La escala Celsius o de grados centígrados (relativa)
La escala kelvin(absoluta)
La equivalencia entre las dos escalas es:
Grados kelvin = grados centígrados + 273
En el sistema de medida inglés, su equivalencia será:
-la escala Fahrenheit (relativa)
-la escala ranking (absoluta)
La equivalencia entre estas dos escalas es:
Grados rankine =grados Fahrenheit + 460
Por otra parte las escalas Celsius y Fahrenheit están referidas al mismo patrón, pero
sus escalas son diferentes. El patrón de referencia usado para su definición fueron los
cambios de estado del agua. Estos puntos son:
CAMBIO DE ESTADO CELSIUS FAHRENHEIT
SÓLIDO –LIQUIDO
0
32
LIQUIDO-GAS
100
212
Tabla 4.1 Equivalencias de cambios de estado
Como se puede deducir de la tabla 4.1, por cada grado Celsius de cambio térmico
tendremos 1,8 grados Fahrenheit de cambio equivalente. De todo esto, la equivalencia entre
estas dos escalas será:
Grados Fahrenheit= grados Celsius *1,8 + 32
4.2 INSTRUMENTOS USUALES PARA MEDICION DE
TEMPERATURA
Los tipos de instrumentos usuales que son usados para la medición de la
temperatura son básicamente los siguientes:
1. Termómetro de vidrio
2. Termómetro bimetalico
3. Termopares
4. Termorresistencia (RTD)
5. Pirómetro de radiación
6. Termocuplas
7. Termistores
8. LM35
9. Sensor de temperatura a resistencia de carbono
Esta clasificación de sensores de temperatura se diferencian por el material del cual
están hechos, por la forma en que censan la temperatura, y por los rangos que pueden
alcanzar a registrar.
4.2.1 Termómetro de Vidrio
Este tipo de instrumento, es el mas conocido por nosotros; consta de un tubo de
vidrio hueco, con un deposito lleno de fluido muy sensible volumétricamente a los cambios
de temperatura.
Dependiendo del fluido usado, tendremos diferentes rangos de temperatura para este
tipo de instrumento, los cuales, vendrán limitados, por los puntos de solidificación y de
ebullición de los antes citados fluidos. Algunos de estos son:
Mercurio -35 a 280 ºC
Mercurio (tubo de gas) -35 a 450 ºC
Pentano -200 a 20 ºC
Alcohol -110 a 50 ºC
Tolueno -70 a 100 ºC
Fig. 4.1 Termómetro de vidrio
Estos son frágiles, requieren de una posición específica para funcionar, además de tener un
rango muy limitado de la variable.
4.2.2 Termómetros Bimetalicos
El bimetal termoestático se define como un material compuesto que consta de
tiras de dos o mas metales unidos entre si, al ser estos materiales diferentes, tendrán
necesariamente, que
tener diferentes coeficientes de dilatación lineal. Debido a los
diferentes índices de expansión de sus componentes, esta composición tiende a cambiar de
curvatura cuando se somete a una variación de temperatura.
Cuando se mantiene fijo un extremo de la franja recta, el otro sufre una deflexión
proporcional al cambio de temperatura y el cuadrado de la longitud, y en sentido inverso al
espesor, a lo largo de la porción lineal de la curva característica de deflexión.
Si una cinta bimetálica se enrolla en forma helicoidal o como espiral y se fija uno de
sus extremos, el otro girara al aplicársele calor. Para un termómetro con divisiones de
escala uniformes, el elemento bimetalico se debe diseñar de tal manera que tenga una
deflexión lineal a lo largo de la gama de temperatura deseada.
Fig. 4.2 Termómetro bimetalico
* Tipos de Elementos en Termómetros Bimetalicos
Los tres tipos de elementos más usados en termómetros bimetálicos son la espiral
plana, la hélice simple y la hélice múltiple.
Los termómetros bimetálicos se destinan a utilizarse a temperaturas que oscilan
entre 1000 ºF hasta -300 ºF e incluso a niveles inferiores. Sin embargo, a temperaturas
bajas, el índice de deflexión se reduce con suma rapidez. Los termómetros bimetálicos no
tienen una estabilidad muy prolongada a temperaturas superiores a 800 ºF.
Tanto las cintas como las espirales bimetálicas constituyen la base sensora para una gran
variedad de conmutadores y controles termostáticos. La expansión diferencial entre dos
metales, que no están totalmente unidos en toda su longitud, constituye la base de otro
grupo de conmutadores de temperatura y controles termostáticos.
4.2.3 Termopares
Un termopar es un circuito formado por dos metales distintos que produce un
voltaje siempre y cuando los metales se encuentren a temperaturas diferentes. En
electrónica, los termopares son ampliamente usados como sensores de temperatura. Son
baratos, intercambiables, tiene conectores estándar y son capaces de medir un amplio rango
de temperatura. Pero su principal limitación es la exactitud ya que los errores de los
sistemas inferiores a un grado centígrado son difíciles de obtener. El grupo de termopares
conectados en serie recibe el nombre de termopila. Tanto los termopares y las termopilas
son muy usadas en aplicaciones de calefacción de gas.
El termopar se basa en el principio, del defecto que fuera descubierto en 1821 por
Seebeck, que establece que cuando la unión de dos materiales diferentes se encuentra a una
temperatura diferente que la del medio ambiente, a través de esos materiales circulara una
corriente.
El uso de termopares en la industria se ha popularizado, ya que son altamente
precisos y mucho más económicos que las termorresistencias.
Existen muchos métodos para realizar mediciones prácticas de temperatura. De
todos ellos, unos fueron desarrollados para aplicaciones particulares mientras que otros han
ido cayendo en el desuso.
* Funcionamiento del Termopar
En 1882 el físico Estoniano Thomas Seebeck descubrió accidentalmente que la
unión entre dos metales genera un voltaje que es función de la temperatura. Los termopares
funcionan bajo el principio llamado efecto Seebeck si bien casi cualquier par de metales
pueden ser usados para crear un termopar, se usa un cierto numero debido a que producen
voltajes predecibles y amplios gradientes de temperatura.
El la figura 4.3 se muestra un diagrama de un termopar del tipo K, que es el mas popular.
Fig. 4.3 Diagrama de un termopar tipo K.
Este termopar de tipo K producirá 12,2 mV a 300 ºC. Desafortunadamente no es
posible conectar un voltímetro al termopar para medir este voltaje por que la conexión a las
guías del voltímetro hará una segunda unión no deseada. Para realizar mediciones precisa
se debe compensar al usar una técnica conocida como compensación de unión fría (CUF).
La ley de los metales intermedios dice que un tercer metal introducido entre dos
metales distintos de una unión termopar no tendrá efecto siempre y cuando las dos uniones
estén a la misma temperatura. Esta ley es importante en la construcción de uniones de
termopares. Es posible hacer una unión termopar al estañar dos metales, ya que la
estañadura no afectara la sensibilidad.
Por lo general la temperatura de la unión fría es detectada por un termistor de
precisión en buen contacto con los conectores de salida del instrumento de medición. Esta
segunda lectura de temperatura, junto con la lectura del termopar es usada por el
instrumento de medición para calcular la temperatura verdadera en el extremo del termopar.
Para aplicaciones menos criticas, la CUF es usada por un sensor de temperatura
semiconductor. Al combinar la señal de este conductor con la señal del termopar, la lectura
correcta puede ser obtenida sin la necesidad o esfuerzo de registrar dos temperaturas. La
comprensión de la compensación de unión fría es importante; cualquier error en la
medición de la temperatura de la unión fría terminara en el error de la temperatura medida
en el extremo del termopar.
* Tipos de Termopares
Tipo K: (cromo (níquel-Cr)/aluminio (aleación de Ni-Al): con una amplia variedad de
aplicaciones esta disponible a un bajo costo y en una variedad de sondas. Tiene un rango de
temperatura de -200 ºC a +1.200 ºC y una sensibilidad de 41μV/ºC aproximadamente.
Tipo E (cromo/constantán (aleación de Cu-Ni)): no son magnéticos y gracias a su
sensibilidad, son ideales para el uso en bajas temperaturas, en el ámbito criogénico. Tiene
una sensibilidad de 68 μV/ºC.
Tipo J (hierro /constantán): debido a su limitado rango el tipo J es menos popular que el K.
son ideales para usar en viejos equipos que no aceptan el uso de termopares más modernos.
El tipo J no puede usarse a temperaturas superiores a
760ºC
ya que una abrupta
transformación magnética causa una descalibraciòn permanente. Tienen un rango de -40ºC
a +750ºC.
Tipo N (nicrosil (Ni-Cr-si/misil (ni-si)): es adecuado para mediciones de alta temperatura
gracias a su elevada estabilidad y resistencia a la oxidación de altas temperaturas y no
necesita del platino utilizado en los tipos B, R y S que son más caros.
Tipo B (platino (Pt)-rodio (Rh)): son adecuado para la medición de altas temperaturas
superiores a 1.800 ºC. El tipo B por lo general presentan el mismo resultado a 0ºC y 42ºC
debido a su curva de temperatura/voltaje.
Tipo R (platino (Pt)-rodio (Rh)): adecuados para la medición de temperaturas de hasta
1.600ºC, con una baja sensibilidad (10 μV/ºC).
Tipo S (hierro/constantán): ideal para mediciones de altas temperaturas hasta los 1.600ºC
pero su baja sensibilidad (10μV/ºC) y su elevado precio lo convierten en un instrumento no
adecuado para el uso general. Debido a su elevada estabilidad el tipo S es usada para la
calibración universal del punto de fusión del oro (1064,43ºC).
Tipo T: es un termopar adecuado para mediciones en el rango de -200ºC a 0ºC. El
conductor positivo esta hecho de cobre y el negativo de constantán.
4.2.4 Termoresistencia
Se basa en el hecho de que la resistencia eléctrica de los metales aumenta al crecer
la temperatura. El termómetro se compone de un alambre fino, generalmente de platino,
arrollado sobre una armadura de mica y encerrado dentro de un tubo de plata de paredes
delgadas que sirve de protección. Mediante hilos de cobre se une el termómetro a un
dispositivo para medir resistencias, el cual pude estar colocado en un sitio conveniente.
Puesto que la resistencia puede medirse con mucha precisión, el termómetro de resistencia
es uno de los instrumentos más precisos para la medida de temperaturas, pudiendo
alcanzarse una aproximación de 0,001 ºC. El intervalo de utilización de este termómetro de
resistencia de platino abarca, aproximadamente, de -250 ºC hasta 1760 ºC, que es el punto
de fusión del platino.
TMR5
Fig. 4.4 Termoresistencia armada completa, con cabezal de conexión tipo Din vaina de protección
y zócalo para conectar al cable.
* Principio de Funcionamiento de la Termoresistencia
Las termoresistencias trabajan según el principio de que en la medida que varia la
temperatura, su resistencia se modifica, y la magnitud de esta modificación puede
relacionarse con la variación de temperatura.
Las termoresistencias de uso más común se fabrican de alambres finos soportados
por un material aislante y luego encapsulados. El elemento encapsulado se inserta luego
dentro de un tubo metálico cerrado en un extremo que se llena con un polvo aislante y se
sella con cemento para impedir que absorba humedad.
La relación fundamental para el funcionamiento será la siguiente:
Rt = Ro * (1 +
* t)
(4.1)
Donde:
Ro: resistencia en ohmios a 0 grados Celsius
Rt: resistencia a la temperatura t grados Celsius
: coeficiente de temperatura de la resistencia. Los materiales utilizados para los
arrollamientos de termorresistencias son fundamentalmente platino, níquel, níquel-hierro,
cobre y tungsteno.
Como se puede observar, se esta suponiendo de antemano, que el material que será
usado debe tener un comportamiento lineal, dentro del rango de trabajo asignado, de no ser
así, la función debería tener más términos.
El método de medición de la temperatura no es directo, ya que lo que se mide es una
resistencia mediante un puente de Wheastone, luego se lee el valor de la temperatura
correspondiente de tabla de comportamiento de la citada resistencia. Este proceso, en la
actualidad, ya esta automatizado, gracias a los sistemas de control avanzados y la
electrónica digital.
El platino encuentra aplicación dentro de un amplio rango de temperaturas y es el
material más estable y exacto. En efecto, la relación resistencia-temperatura
correspondiente al alambre de platino es tan reproducible que la termoresistencia de platino
se utiliza como estándar internacional de temperatura desde - 260 ºC hasta 630 ºC.
Desde 1871, año en que William Siemens utilizó por primera vez una
termoresistencia, hasta hoy día han sido desarrolladas numerosas calibraciones resistencia temperatura correspondientes al platino, y varias de ellas se han transformado en estándares
nacionales en distintos países.
Además del hecho de que la termoresistencia de platino está siendo utilizada como
estándar internacional, el alambre de platino es el material elegido con más frecuencia para
las termoresistencias de uso industrial. Las termoresistencias de platino pueden medir el
rango más amplio de temperaturas, son las mas exactas y estables por no ser fácilmente
contaminadas por el medio en que se encuentran, y su relación resistencia -temperatura es
más lineal que la de cualquier otro material con la excepción del cobre. Este tipo de
sensores tiene una ventaja fundamental; son sumamente precisos y producen medidas
altamente reproducibles.
METAL
RANGO DE OPERACIÓN ºC PRESICION( GRADOS)
PLATINO -200 A 950
0.01
NIQUEL
-150 A 300
0.50
COBRE
-200 A 120
0.10
Tabla 4.2 Rangos de operación y precisión de diferentes metales.
4.2.5 Pirómetro de Radiación
Un pirómetro en un instrumento utilizado para medir, por medios eléctricos,
elevadas temperaturas por encima del alcance de los termómetros de mercurio. Este
término abarca a los pirómetros ópticos, de radiación, de resistencia y termoeléctricos.
Los pirómetros de radiación se fundan en la ley de Stefan - Boltzman y se destinan a
medir elevadas temperaturas, por encima de 1600°C. Las medidas pirométricas, exactas y
cómodas, se amplían cada vez más, incluso para temperaturas relativamente bajas (del
orden de 800 °C).
* Principio Físico
Los pirómetros de radiación se fundamentan en la ley de Stefan - Boltzman que dice
que la energía radiante emitida por la superficie de un cuerpo negro aumenta
proporcionalmente a la cuarta potencia de la temperatura absoluta del cuerpo, es decir:
W = σ T4
(4.2)
Donde:
W: (potencia emitida): es el flujo radiante por unidad de área,
σ: es la constante de Stefan - Boltzman (cuyo valor es 5.67 10-8 W / m2 K4) y
T: es la temperatura en Kelvin
Si el cuerpo radiante de área A está dentro de un recinto cerrado que está a la temperatura
To, su pérdida neta de energía por segundo, por radiación está dada por:
U = σA (T4 - To4)
(4.3)
La ley de Stefan fue establecida primeramente en forma experimental por Stefan en
1879; Boltzman proporcionó su demostración termodinámica en 1884. Desde el punto de
vista de la medición de temperaturas industriales, las longitudes de onda térmicas abarcan
desde las 0.1 micras para las radiaciones ultravioletas, hasta las 12 micras para las
radiaciones infrarrojas. La radiación visible ocupa un intervalo entre la longitud de onda de
0.45 micras para el valor violeta, hasta las 0.70 micras para el rojo.
* Estructura de los Pirómetros de Radiación
Los pirómetros de radiación para uso industrial, fueron introducidos hacia 1902 y
desde entonces se han construido de diversas formas. El medio de enfocar la radiación que
le llega puede ser una lente o un espejo cóncavo; el instrumento suele ser de "foco fijo" o
ajustable en el foco, y el elemento sensible puede ser un simple par termoeléctrico en aire o
en bulbo de vacío o una pila termoeléctrica de unión múltiple en aire. La fuerza
electromotriz se mide con un milivoltímetro o con un potenciómetro, con carácter
indicador, indicador y registrador o indicador, registrador y regulador.
El espejo cóncavo es a veces preferido como medio para enfocar por dos razones:
a) la imagen de la fuente se enfoca igualmente bien en el receptor para todas las longitudes
de onda, puesto que el espejo no produce aberración cromática, en tanto que la lente puede
dar una imagen neta para una sola longitud de onda.
b) los lentes de vidrio o de sílice vítrea absorben completamente una parte considerable de
la radiación de largas longitudes de onda. La radiación reflejada por el espejo difiere poco
en longitud de onda media de la que en él incide.
Fig. 4.5 Sensor de temperatura mediante pirómetro de radiación
4.2.6 Termocuplas
Si se presenta un gradiente de temperatura en un conductor eléctrico, el flujo de
calor creara un movimiento de electrones y con ello se generara una fuerza electromotriz
(FEM) en dicha región. La magnitud y dirección de la FEM será dependiente de la
magnitud y dirección del gradiente de temperatura del material que conforma el conductor.
Las termocuplas se basan para su funcionamiento en el efecto SEEBEK.
Fig. 4.6 FEM creada por un gradiente de temperatura.
Calentado la juntura de dos materiales distintos que componen un circuito cerrado, se
establece una corriente. Las leyes principales que rigen su funcionamiento son:
1. ley de homogeneidad del circuito: no se puede obtener corriente calentando un solo
metal.
2. ley de metales intermedios: la sumatoria de las diferencias de potencial térmicas es cero
en un circuito con varios metales, si estos están a temperatura uniforme.
En la figura 4.7 ambos instrumentos marcaran igual, es decir la corriente circulante
dependerá en ambos casos de T1 y T2 exclusivamente.
Fig. 4.7 Corriente circulante dependerá de T1 y T2
3.-ley de temperaturas intermedias: la fuerza electromotriz térmica de una termocupla no
depende de las temperaturas- intermedias.
4.2.7 Termistores
Compuesto de una mezcla sintetizada de óxidos metálicos, el termistor es
esencialmente un semiconductor que se comporta como un "resistor térmico" con un
coeficiente térmico de temperatura negativo de valor muy elevado.
Los Termistores también se pueden encontrar en el mercado con la denominación NTC
(Negative Temperature Coeficient) habiendo casos especiales de coeficiente positivo
cuando su resistencia aumenta con la temperatura y se los denomina PTC (Positive
Temperature Coeficient).
En algunos casos, la resistencia de un termistor a la temperatura ambiente puede
disminuir en hasta 6% por cada 1ºC de aumento de temperatura. Esta elevada sensibilidad a
variaciones de temperatura hace que el termistor resulte muy adecuado para mediciones
precisas de temperatura, utilizándose ampliamente para aplicaciones de control y
compensación en el rango de 150ºC a 450ºC.
El termistor se fabrica a partir de óxidos metálicos comprimidos y sintetizados y los
metales utilizados son níquel, cobalto, manganeso, hierro, cobre, magnesio y titanio, como
típicas se pueden considerar las preparaciones de óxido de manganeso con cobre y óxido de
níquel con cobre. Modificando las proporciones de óxido se puede variar la resistencia
básica de un termistor; se dispone de termistores con resistencias básicas a 25 ºC desde
unos pocos cientos hasta varios millones de ohms.
Los termistores sirven para la medición o detección de temperatura tanto en gases,
como en líquidos o sólidos. A causa de su muy pequeño tamaño, se los encuentra
normalmente montados en sondas o alojamientos especiales que pueden ser
específicamente diseñados para posicionarlos y protegerlos adecuadamente en cualquiera
que sea el medio donde tengan que trabajar.
Las configuraciones constructivas del termistor de uso más común son los glóbulos,
las sondas y los discos. Los glóbulos se fabrican formando pequeños elipsoides de material
de termistor sobre dos alambres finos separados unos 0,25 mm. Normalmente recubiertos
con vidrio por razones de protección, son extremadamente pequeños (0,15 mm a 1,3 mm de
diámetro) y ofrecen una respuesta extremadamente rápida a variaciones de temperatura.
Fig. 4.8 Formas constructivas del termistor NTC: a) glóbulo con diferentes tipos de terminales
b) tipo disco c) tipo barra.
4.2.8 LM35
El LM35 es un circuito integrado sensor de temperatura de precisión, cuyo voltaje
de salida es directamente proporcional a la temperatura en Celsius. Así el LM35 tiene una
ventaja. El LM35 no requiere ninguna calibración externa o ajuste para proporcionar
exactitudes típicas de ±1/4 ºC en la temperatura ambiente y ±3/4 ºC sobre un rango de
temperatura entre -55 a +150 ºC. El bajo costo es debido al ajuste y la calibración del nivel
de la oblea. La baja impedancia de salida, salida lineal y la calibración exacta inherente
del LM35 son características eficientes para una salida de lectura y un control del circuito
relativamente fácil. Este puede ser usado con una sola fuente de poder o con más o menos
fuentes. El LM35 es nominal para operar entre un rango de temperatura de -55 a +150 ºC
mientras que el LM35C es nominal para un rango de -40 a +110 ºC.
* Características
Calibrada directamente en º Celsius
Factor de linealidad de +10 mV/ºC
Exactitud garantizada de 0.5 ºC (en +25 ºC)
Nominal para un rango de -55 a +150 ºC
Conveniente para aplicaciones remotas
Bajo costo debido al nivel de ajuste de la oblea
Opera entre 4 y 30 volts
Necesita menos de 60 μA de corriente
No lineal, solo ± ¼ ºC típico
Baja impedancia de salida, 0.1 Ω para 1mA
* Aplicaciones
El LM35 puede ser aplicado fácilmente de la misma manera como otros circuitos
integrados sensores de temperatura; eso puede ser pegado o unido a una superficie y su
temperatura será entre 0.01 ºC de la temperatura superficial. Esto supone que la temperatura
de aire ambiental es casi la misma que la temperatura de la superficie; si la temperatura del
aire fuera mucho más alta o mas baja que la temperatura superficial, la temperatura real del
LM35 debería ser una temperatura intermedia entre la temperatura superficial y la
temperatura del aire.
El modo mas fácil para minimizar el problema de la buena lectura de la temperatura
es cubrir estos cables, que asegurara que el conductor y los cables estén todos a la misma
temperatura como la superficie, y que el LM35 no se afectada por la temperatura del aire.
Fig. 4.9 Esquema del sensor de temperatura LM35.
4.2.9 Sensor de Temperatura a Resistor de Carbono
Los sensores de resistencia de carbono: son los que transforman la variación de la
magnitud a medir en una variación de su resistencia eléctrica. Un ejemplo puede ser un
termistor, que sirve para medir temperaturas.
Las resistencias semiconductoras pueden ser utilizadas como termómetros a rangos
muy bajos en la escala de temperaturas. Para la medición de muy bajas temperaturas por
medio de la utilización de elementos resistivos se debe tener en cuenta que las corrientes
empleadas en la medición no deben provocar calentamientos a la muestra, es decir que es
muy crítica la disipación de calor del dispositivo que mide la temperatura dentro del
sistema a ser medido.
Fig. 4.10 Características de los resistores de carbono.
Existe, entonces, una relación muy grande entre calor disipado hacia el sistema y
magnitud de la señal a medir, esto nos obliga a la utilización de pequeñas corrientes de
alimentación acompañadas de instrumentos de medición muy sensibles. Es conveniente la
utilización de señales de corriente alterna (a.c.) frente a las de corriente continua (c.c.), pues
la tecnología de técnicas de detección para este tipo de señales es mucho más sensible.
Sumado a esto contamos con que es mas fácil detectar fem's inducidas por temperatura al
trabajar con señales del tipo a.c. Un detalle a tener en cuenta al trabajar con resistencias a
muy bajas temperaturas es el calentamiento debido a campos de altas frecuencias.
Señales de radiofrecuencia pueden interactuar con el dispositivo e intervenir en la
medición generando calentamiento sin ninguna fuente aparente de calor. Para evitar esto se
instalan filtros (tales como capacitores en paralelo al dispositivo resistivo) que se montan,
incluso, dentro del mismo termómetro.
* Resistencias de carbón
Las resistencias de carbón son muy utilizadas para mediciones de muy bajas
temperaturas. Ellas cubren sin ningún problema el rango de temperaturas que abarca un
crióstato refrigerado por helio-3. La relación entre la resistencia y la temperatura para estos
dispositivos se la puede expresar como:
A log10 R B C / log10 R 1 / T
(4.4)
Una vez determinadas las constantes A, B y C, estas no deben ser recalculadas luego
de haber calentado el termómetro hasta temperatura ambiente, esto es realmente una
ventaja. La sensibilidad de las resistencias de carbón a los efectos del campo magnético no
es crítica. Algunos dispositivos pueden llegar a presentar un cambio del 2 % en la
resistencia bajo la acción de campos de 1/T e independientemente de la orientación del
mismo.
Capitulo 5
IMPLEMENTACION DEL SISTEMA DE CONTROL
DE TEMPERATURA
5.1 OBJETIVO DEL CIRCUITO SENSOR DE TEMPERATURA
El objetivo del circuito construido consiste en un sensor de temperatura
monitoreado vía PC, el cual consta de cuatro integrados cuya función es la siguiente:
1. LM35
2. ADC0804
3. PIC 16f84A
4. MAX232
El LM35 otorga al PIC el valor de la temperatura ambiente, para tal propósito el
LM35 y el PIC 16f84A se encuentran interconectados mediante un conversor
analógico/digital ADC0804. Una vez procesada la temperatura a datos digitales el PIC lo
envía a la PC vía serial mediante el integrado MAX232 para su visualización.
5.2 DISPOSITIVOS ELECTRÓNICOS UTILIZADOS
5.2.1 LM35
Este integrado es un sensor de temperatura cuya tensión de salida es linealmente
proporcional con la temperatura en la escala de Celsius, el cual posee una precisión
aceptable para la aplicación requerida, no necesita calibración externa, posee solo tres
terminales y es de bajo costo.
Sus características principales son las siguientes:
1. factor de escala: 10mV/ºC
2. rango de utilización: -55 ºC a 150ºC
3. precisión: ≈ 1.5ºC
4. no linealidad: ≈0.5ºC
5.2.2 ADC 0804
Como ya se había mencionado, es un integrado que convierte señales analógicas en
datos binarios 0’s y 1`s. El convertidor analógico/digital ADC0804 es capaz de convertir
una muestra analógica entre 0 y 5 V, en un valor binario de 8 dígitos binarios.
Distribución de pines:
Vcc: voltaje positivo de alimentación
AGND: tierra del sistema análogo
DGND: tierra del sistema digital
Vin(+): terminal positiva del voltaje de entrada
Vin(-): terminal negativa del voltaje de entrada
DB7-DB0: salidas de la conversión digital, con DB7 el MSB y el DB0 el LSB
CLKin: entrada de reloj
CLKr: salida de reloj cuya frecuencia depende de una resistencia y un condensador
externos.
CS: chip select, para que el ADC 0804 funcione debe estar en low.
RD: esta entrada se usa para habilitar los buffers de las salidas digitales.
WR: cuando va a low el proceso de conversión se inicia.
INTR: genera una interrupción de nivel low cuando finaliza el proceso de conversión.
Vref/2: este pin debe ser alimentado con la mitad del rango de voltaje analógico máximo
que se va a recibir.
5.2.3 PIC 16f84A
Este PIC esta fabricado con la tecnología CMOS y encapsulado en plástico de 18
pines.
Vdd: se aplica la tensión positiva de alimentación.
Vss: pin conectado a tierra o negativo de la alimentación.
OSC1/CLKIN: pin por el que se aplica la entrada del circuito oscilador externo que
proporciona la frecuencia de trabajo del microcontrolador.
OSC2/CLKOUT: pin auxiliar del circuito oscilador.
MCLR #: este pin esta activado con un nivel lógico bajo, lo que se representa con el
símbolo 3. Su activación origina la reinicialización o reset del PIC. También se usa este pin
durante la grabación de la memoria de programa para introducir por ella la tensión Vpp,
que esta comprendida entre 12 y 14V.
RA0-RA4: son 5 líneas de E/S digitales correspondientes a la puerta A. la línea RA4
multiplexa otra función expresado por TOCK1. En este segundo caso sirve para recibir una
frecuencia externa para alimentar al temporizador interno TMR0.
RB0-RB7: estos 8 pines corresponde a las 8 líneas de E/S digitales de la puerta B. la línea
RB0 multiplexa otra función que es la de servir como entrada a una petición externa de una
interrupción por eso se le denomina RB0/INT
5.2.4 MAX232
Este circuito integrado soluciona los problemas de niveles de voltaje cuando se
requiere enviar señales digitales sobre una línea RS232. El MAX232 se usa en aquellas
aplicaciones donde no se dispone de fuentes dobles de 12V; por ejemplo en aplicaciones
alimentados con baterías de una polaridad. El MAX232 necesita solo una fuente de 5V
para su operación, un elevador de voltaje interno convierte el voltaje de 5V al doble de
polaridad de ±12V.
5.3 CÓDIGOS FUENTE PARA EL SENSOR DE TEMPERATURA
5.3.1 Código Fuente en Lenguaje Ensamblador para Programar el PIC 16f84A
; Universidad Veracruzana
; Sensor digital de temperatura
;Yarely Sac Nic Teh Dzul May, Mario Olmedo Garcia
LIST
P=16F84A
; Declaración de registros
status equ
0x03
PORTA equ
0x05
PORTB equ
0x06
carry
equ
0
TX
equ
1
WR
equ
2
CLK
equ
3
INTR
equ
4
loops
equ
0x0c
r0d
equ
0x0d
r0e
equ
0x0e
trans
equ
0x0f
org
0
goto
inicio
org
5
;Subrutina reloj, que se encarga de dar pulsos al ADC0804
reloj
bsf
PORTA,CLK
;sube la linea del reloj
movlw 0x1F
movwf loops
;retardo
reloj2 decfsz loops
goto
reloj2
bcf
PORTA,CLK
;baja la linea de reloj
movlw 0x1F
movwf loops
;retardo
reloj3 decfsz loops
goto
reloj3
return
;Subrutina delay para transmitir un bit
delay movlw .166
;cargar para 833 microseg aproximadamente
startup movwf r0e
;llevar a cabo el retardo
redo
nop
;limpiar circuito de vigilancia
nop
decfsz r0e
goto
redo
retlw 0
;Fin de la subrutina delay
;Subrutina enviar, envia el valor de la temperatura
;al PC de manera serial
enviar movwf trans
;llevar el contenido de w a transmision
xmrt movlw 8
;cargar con el numero de bits
movwf r0d
;el contador
bcf
PORTA,TX
call
delay
xnext bcf
;colocar la linea de transmision en bajo
;para generar bit de arranque
PORTA,TX
;colocar la linea de transmision en bajo
bcf
status,carry ;limpiar el carry
rrf
trans
;rotar registro de transmision
btfsc status,carry ;preguntar por el carry
bsf
PORTA,TX
call
delay
;si es uno, colocar linea en alto
decfsz r0d
;decrementar el contador, saltar si cero
goto
xnext
;repetir hasta transmitir el dato
bsf
PORTA,TX
call
delay
;colocar la linea de transmision en alto
;llamar retardo 1 bit -bit de parada-
retlw 0
;Final de la subrutina enviar
;Inicio del programa
inicio bsf
status,5
movlw 0x11
movwf PORTA
movlw 0xFF
movwf PORTB
bcf
status,5
bsf
PORTA,TX
bcf
PORTA,WR
;colocar la linea de transmision en alto
;colocar en bajo WR para resetear el ADC
movlw 0x1F
movwf loops
;retardo
salto1 decfsz loops
goto
salto1
bsf
PORTA,WR
;colocar en alto WR para iniciar la conversion
movlw 0x1F
movwf loops
;retardo
salto2 decfsz loops
goto
pulsos call
salto2
reloj
;llamar a la subrutina reloj
btfsc PORTA,INTR
goto
;preguntar se INTR es cero, si lo es saltar
pulsos
movf
PORTB,w
call
enviar
goto
inicio
;cargar el dato binario en w
;llamar a la subrutina enviar
end
5.3.2 Código Fuente en Delphi para crear la Interfase entre el Sensor y la PC
unit pctermo;
interface
uses
Windows, Messages, SysUtils, Classes, Graphics, Controls, Forms, Dialogs,
Buttons, ComPort, ExtCtrls, StdCtrls, Gauges;
type
TForm1 = class(TForm)
Label1: TLabel;
Label2: TLabel;
Label3: TLabel;
GroupBox1: TGroupBox;
Gauge1: TGauge;
GroupBox2: TGroupBox;
shPortOpen: TShape;
shError: TShape;
StaticText1: TStaticText;
StaticText2: TStaticText;
cbPorts: TComboBox;
Image1: TImage;
ComPort1: TComPort;
StaticText3: TStaticText;
SpeedButton1: TSpeedButton;
SpeedButton2: TSpeedButton;
SpeedButton3: TSpeedButton;
Label4: TLabel;
Label5: TLabel;
procedure FormCreate(Sender: TObject);
procedure FormDestroy(Sender: TObject);
procedure ComPort1Open(Sender: TObject);
procedure ComPort1Close(Sender: TObject);
procedure ComPort1ReceiveCallBack(Data: String);
procedure btnOpenClick(Sender: TObject);
procedure btnCloseClick(Sender: TObject);
procedure btnSalirClick(Sender: TObject);
procedure ComPort1Error(Sender: TObject);
private
{ Private declarations }
public
{ Public declarations }
end;
var
Form1: TForm1;
implementation
{$R *.DFM}
procedure TForm1.FormCreate(Sender: TObject);
begin
EnumPorts( cbPorts.Items );
if cbPorts.Items.Count > 0 then
cbPorts.ItemIndex := 0;
end;
procedure TForm1.FormDestroy(Sender: TObject);
begin
ComPort1.Free;
end;
procedure TForm1.ComPort1Open(Sender: TObject);
begin
shPortOpen.Brush.Color := clYellow;
end;
procedure TForm1.ComPort1Close(Sender: TObject);
begin
shPortOpen.Brush.Color:=clwhite;
end;
procedure TForm1.ComPort1ReceiveCallBack(Data: String);
var
i,temperatura: longint;
begin
Temperatura:=Ord(Data[1]);
Temperatura:= (Temperatura*38) div 256;
Image1.Visible := not Image1.Visible;
label1.Caption:=IntToStr(Temperatura);
Gauge1.Progress:=Temperatura;
for i:=0 to 100000000 do
begin
end;
end;
procedure TForm1.btnOpenClick(Sender: TObject);
begin
cbPorts.Enabled := false;
ComPort1.Port := cbPorts.Items[cbPorts.ItemIndex];
ComPort1.Open;
end;
procedure TForm1.btnCloseClick(Sender: TObject);
begin
ComPort1.Close;
cbPorts.Enabled := true;
label1.Caption:='0';
Gauge1.Progress:=0;
end;
procedure TForm1.btnSalirClick(Sender: TObject);
begin
close;
end;
procedure TForm1.ComPort1Error(Sender: TObject);
begin
shError.Brush.Color := clRED;
end;
end.
5.4 DIAGRAMA ELÉCTRICO DEL SENSOR DE TEMPERATURA
MONITOREADO VIA PC
Conclusiones
En este trabajo recepcional, se desarrollaron los circuitos electrónicos para
propósitos de control y monitoreo de temperatura a través de la computadora. La
adaptación efectuada por CI MAX232 para la adecuación de los niveles de voltaje del
puerto serie permitió la comunicación entre el circuito de control y la PC. Con el sensor de
temperatura y después del procesamiento de la señal, se logro visualizar los cambios de la
temperatura en la PC.
Es importante mencionar, que realizando los ajustes de programa para la
interpretación de los datos es posible lograr que la medición de la temperatura en tiempo
real, sea la más próxima a la que provee el medidor virtual de la PC, mejorando con esto la
confiabilidad del proceso de medición del control de temperatura.
Por último, la continuidad de este proyecto es evidente, ya que en la industria
actualmente requieren de la PC para el control y monitoreo de sus procesos de
automatización.
Glosario
LCD: pantalla de cristal liquido (liquid crystal display)
USB: bus serial universal (universal serial bus)
ATA: tecnología avanzada de enlace (advanced technology attachment).
IEEE: istituto de ingenieros eléctricos y electrónicos (institute of electrical and electronics
engineers).
BIOS: sistema básico de entrada y salida (Basic input-output system).
UART: transmisor-receptor asincrono universal (universal asynchronous receivetransmitter).
RDSI: red digital de servicios integrados.
NRZI: sin retorno a cero invertido (non return to zero inverted).
CRC: análisis de redundancia cíclica (cyclical redundancy check).
ASCII: código estándar Americano para el intercambio de información.
Galga: dispositivo electrónico que aprovecha el efecto piezoresistivo para medir
deformaciones.
ADC: convertidor analógico- digital (analog digital converter).
DAC: convertidor digital- analógico (digital analog converter).
CAS: convertidor de aproximaciones sucesivas.
MSB: bit más significativo (most significant bit).
LSB: bit menos significativo (least significant bit).
CUF: compensación de unión fría.
FEM: fuerza electromotriz.
NTC: coeficiente de temperatura negativa (negative temperatura coeficient).
PTC: coeficiente de temperatura positiva (positive temperatura coeficient).
Bibliografía
Diseño de Sistemas Digitales y Microprocesadores
John P. Hayes
Mc Graw Hill
Instrumentación Electrónica
a.j. Diefenderfer
Interamericana
Electrónica: teoría de los circuitos
Robert L. Boylestad – Louis Nashelsky
Prentice- Hall Hispanoamericana, s.a
Circuitos Electrónicos Discretos e Integrados
Donald L. Schilling- Charles Belove
Mc Graw- Hill
Sistemas Digitales
Principios y aplicaciones
Ronald J. Tocci
Neal S. Widmer
Sistemas Electrónicos Digitales
Enrique Mandado
Alfaomega marcombo
Se consultaron diversas páginas de Internet.
Revistas consultadas
Saber Electrónica No.187
Comando de dispositivos por computadora
Saber electrónica
Edición especial
Curso de microcontroladores PICS