diseño de un dispositivo electrónico para el manejo de una interfaz
Anuncio

UNIVERSIDAD SIMÓN BOLÍVAR
DECANATO DE ESTUDIOS PROFESIONALES
COORDINACIÓN DE INGENIERÍA ELECTRÓNICA
DISEÑO DE UN DISPOSITIVO ELECTRÓNICO PARA EL
MANEJO DE UNA INTERFAZ MIOELÉCTRICA.
Por:
Dixi Beatriz González Cruz
INFORME FINAL DE CURSOS EN COOPERACIÓN
TÉCNICA Y DESARROLLO SOCIAL
Presentado ante la Ilustre Universidad Simón Bolívar
como requisito parcial para optar al título de
Ingeniero Electrónico
Sartenejas, Abril de 2010
UNIVERSIDAD SIMÓN BOLÍVAR
DECANATO DE ESTUDIOS PROFESIONALES
COORDINACIÓN DE INGENIERÍA ELECTRÓNICA
DISEÑO DE UN DISPOSITIVO ELECTRÓNICO PARA EL
MANEJO DE UNA INTERFAZ MIOELÉCTRICA.
Por:
Dixi Beatriz González Cruz
Realizado con la asesoría de:
Tutor Académico: Prof. Ricardo Silva
Tutor Industrial: Ing. Juan José Garate Pirela
INFORME FINAL DE CURSOS EN COOPERACIÓN
TÉCNICA Y DESARROLLO SOCIAL
Presentado ante la Ilustre Universidad Simón Bolívar
como requisito parcial para optar al título de
Ingeniero Electrónico
Sartenejas, abril de 2010
UNIVERSIDAD SIMÓN BOLÍVAR
DECANATO DE ESTUDIOS PROFESIONALES
COORDINACIÓN DE INGENIERÍA ELECTRÓNICA
DISEÑO DE UN DISPOSITIVO ELECTRÓNICO PARA EL MANEJO DE UNA
INTERFAZ MIOELÉCTRICA.
INFORME FINAL DE CURSOS EN COOPERACIÓN
TÉCNICA Y DESARROLLLO SOCIAL
Realizado Por:
Dixi Beatriz González Cruz, Carnet 03-35970
Realizado con la asesoría de:
Tutor Académico: Prof. Ricardo Silva
Tutor Industrial: Ing. Juan José Garate Pirela
RESUMEN
El presente trabajo de pasantía está enmarcado en el concepto de vanguardia que suponen los
proyectos de bioingeniería y en respuesta a los requerimientos exigidos por la Unidad de Gestión
en Tecnologías de Salud (UGTS), foco activo y proactivo de bioingeniería en Venezuela, plantea
la realización del diseño de un dispositivo electrónico que funcione como interfaz mioeléctrica
promoviendo alternativas en lo que se refiere al campo de prótesis y proyecciones del nexo
humano-máquina en general. El diseño se dividió en cinco bloques de desarrollo: Adquisición,
Amplificación, Filtrado, Rectificación y Procesamiento. Según las pautas determinadas en cada
uno de los bloques y con el apoyo del Sierra Wave Unit, que es un equipo avanzado y certificado
por la Comisión Internacional Electrotécnica (IEC, por sus siglas en inglés International
Electrotechnical Comision) se realizaron pruebas en ambientes virtuales y reales que permitieron
la recepción satisfactoria de señales del músculo o señales EMG (entrada del dispositivo) y con
éstas arrojar nuevas señales: envolvente, cuadrada y triangular (salida del dispositivo) que pueden
ser utilizadas para controlar otras aplicaciones.
PALABRAS CLAVES: Bioingeniería, Dispositivo electrónico, EMG, Sierra Wave Unit,
Interfaz mioeléctrica.
Aprobado con mención: __X_____
Sartenejas, Abril de 2010
iv
DEDICATORIA
A todos los que creen en la sensibilidad de los ingenieros y que a través de proyectos
engendrados en la ciencia late un corazón que busca mejorar, con las herramientas que posee, la
calidad de vida de todos los seres sintientes.
A todos los que creen que aun siendo novatos podemos contribuir con el desarrollo de la
bioingeniería en nuestro país
Dedico la culminación de este trabajo a todos los que me apoyaron incondicionalmente y
creyeron siempre en mí, a mi familia, en especial a Dizzy Cruz de González: mi madre y mi
amiga, que siempre a nutrido en mí la serenidad y el amor incondicional por aquello que nos
llena y a mi padre José Luis González que desde muy temprana edad me inculcó el valor del
trabajo, la exigencia y la pasión por lo que se hace.
A mis hermanas, porque sé que lo están esperando, porque siempre creen en mí, porque quiero
ser motivo de impulso y de inspiración para que más allá de los obstáculos logren todos tus
sueños y metas, así como ustedes fueron clave para mí durante la culminación de la carrera.
Dedico hoy este trabajo a quien me ha dedicado mucho tiempo, paciencia y cariño, en la
universidad y en la calle, a quien me enseñó el significado de la frase “sobreponerse a uno
mismo”, a mi roomie , Durly Padilla. Te quiero Mucho.
A mis amigos, mis compañeros, con los que pude aprender mil maneras de vivir la carrera y la
vida y encontrar el estímulo para levantarnos cuando fuera necesario. En especial a mi
compañero de mil laboratorios y amigo Angel Gruber, a Eliana Iannece, Barbara Rodríguez y a
Andrés Terán –el gocho-. Me sigue pareciendo mentira que seamos de la misma especie. Sin
ustedes la carrera hubiese sido un plano de mil circuitos y muchos ‘trasnochos’ solitarios nada
más. Los quiero mucho.
v
AGRADECIMIENTOS
A mis padres, pues, obviamente, nada de esto estaría pasando sin el apoyo de ustedes.
A mi familia pues es allí donde formé parte fundamental de quien soy ahora, en especial tengo
que agradecer a la Sra. Justina, por haberse ocupado y ocuparse, tantas veces de mí, porque
siempre cree y confía en mí, porque –a su manera- es una barra infinita de cariño.
Agradezco a un personaje utópico formado por profesores, compañeros, trabajadoras
sociales, obreros y jardineros, llamado Universidad Simón Bolívar, que me albergó a mí y a
muchos otros estudiantes del interior para que nos sintiéramos cómodos, tranquilos, seguros y
lográramos volvernos profesionales sinceros y de alta competencia para enaltecer a nuestro país.
Al Prof. Ricardo Silva, por ser mi tutor Académico y ser quien nutrió en mí la curiosidad
por la bioingeniería y la intención de crear en un país donde muchos han perdido la fe.
A Zhayda Sierra y Suzanne Armengol por sus orientaciones, su humor, su motivación y
su bienvenida, a Carlos Valero y Juan Garate, por sus valiosos concejos. A todo el equipo de la
UGTS.
A la Sra. Margarita Bello y la familia Escobar Delgado, por todo su apoyo durante la
carrera y permitirme ser parte de su familia.
A Neisa y Elkis por sus concejos y simpatía y por hacer de la Coordinación de Ing.
Electrónica un ente fluído para los estudiantes.
A Durly Padilla mil gracias, por siempre estar allí. A Angel Gruber por luchar juntos en
esta exigente Alma Mater. A ambos por ser mis compañeros “pasantes” de la UGTS y
contagiarme y contagiarnos de ganas por ser mejores personas y mejores estudiantes terminando
esta etapa.
vi
ÍNDICE GENERAL
RESUMEN ...................................................................................................................................................................iv
DEDICATORIA ...........................................................................................................................................................v
AGRADECIMIENTOS ..............................................................................................................................................vi
ÍNDICE GENERAL.................................................................................................................................................. vii
ÍNDICE DE TABLAS ................................................................................................................................................xi
ÍNDICE DE FIGURAS ............................................................................................................................................. xii
LISTA DE ABREVIATURAS Y TÉRMINOS ........................................................................................................xv
INTRODUCCIÓN........................................................................................................................................................1
CAPÍTULO 1: PLANTEAMIENTO DEL PROBLEMA .........................................................................................4
1.1 ANTECEDENTES ....................................................................................................................................................4
1.2 JUSTIFICACIÓN ......................................................................................................................................................5
1.3 OBJETIVO GENERAL .............................................................................................................................................6
1.4 OBJETIVOS ESPECÍFICOS .......................................................................................................................................6
1.5 ALCANCE Y LIMITACIONES:..................................................................................................................................7
1.5.1 Alcance.........................................................................................................................................................7
1.5.2 Limitaciones.................................................................................................................................................7
CAPÍTULO 2: ENTORNO EMPRESARIAL ...........................................................................................................9
2.1 LA EMPRESA.........................................................................................................................................................9
2.2 RESEÑA HISTÓRICA ..............................................................................................................................................9
2.3 MISIÓN ...............................................................................................................................................................10
2.4 VISIÓN ................................................................................................................................................................10
2.5 OBJETIVOS Y PRINCIPIOS ....................................................................................................................................10
2.5.1 Objetivos ....................................................................................................................................................10
2.5.2 Principios : ................................................................................................................................................11
2.6 LOGROS ..............................................................................................................................................................11
CAPÍTULO 3: MARCO TEÓRICO: FUNDAMENTOS DE COMUNICACIONES..........................................13
3.1 SEÑAL.................................................................................................................................................................13
3.1.1 Principales características de las señales .................................................................................................13
3.2 SEÑALES ESTACIONARIAS ...................................................................................................................................13
3.3 SEÑALES CONTINUAS ..........................................................................................................................................14
3.4 SEÑALES DISCRETAS ...........................................................................................................................................16
vii
3.5 RUIDO EN UNA SEÑAL .........................................................................................................................................17
3.5.1 Tipos de ruidos...........................................................................................................................................17
3.6 ATENUACIÓN ......................................................................................................................................................19
3.7 AMPLIFICACIÓN ..................................................................................................................................................20
3.8 FILTROS ..............................................................................................................................................................20
3.8.1 Filtro Butterworth......................................................................................................................................20
CAPÍTULO 4: MARCO TEÓRICO: FUNDAMENTOS DE ELECTROFISIOLOGÍA ....................................22
4.1 ELECTROFISIOLOGÍA ...........................................................................................................................................22
4.2 REGISTRO ELECTROFISIOLÓGICO ........................................................................................................................23
4.3 VELOCIDAD DE PROPAGACIÓN ELECTROFISIOLÓGICA ........................................................................................24
4.4 MÚSCULO ESQUELÉTICO .....................................................................................................................................24
4.5 CARACTERÍSTICAS FUNCIONALES DEL MÚSCULO ...............................................................................................26
4.5.1 Excitabilidad..............................................................................................................................................26
4.5.2 Elasticidad .................................................................................................................................................26
4.5.3 Extensibilidad ............................................................................................................................................26
4.5.4 Plasticidad .................................................................................................................................................26
4.5.5 Contractibilidad.........................................................................................................................................27
4.6 ELECTROMIOGRAFÍA ..........................................................................................................................................27
4.7 POTENCIAL DE UNIDAD MOTORA .......................................................................................................................29
4.8 SEÑAL ELECTROMIOGRAFICA (EMG).................................................................................................................32
4.8.1 Características de la señal EMG ...............................................................................................................32
4.9 TIPOS DE ELECTRODOS: ......................................................................................................................................33
4.9.1 Electromiografía convencional (electrodo concéntrico): ..........................................................................33
4.9.2 Electromiografía cuantitativa:...................................................................................................................33
4.9.3 Electromiografía de Fibra Simple (EMGFS): ...........................................................................................34
4.9.4 Macro EMG:..............................................................................................................................................34
4.9.5 EMG de superficie y estudio del espectro de frecuencias:.........................................................................34
4.10 EXTRACCIÓN DE CARACTERÍSTICAS Y RECONOCIMIENTO DE PATRONES. ..........................................................36
4.11 APROXIMACIÓN TEMPORAL..............................................................................................................................36
4.11.1 Valor Medio Absoluto ..............................................................................................................................37
4.11.2 Cruces por cero........................................................................................................................................37
4.11.3 Cambio de pendiente................................................................................................................................37
4.11.4 Longitud de la onda .................................................................................................................................38
4.12 MODELO AR (AUTOREGRESIVE MODEL O MODELO AUTOREGRESIVO) .............................................................38
4.13 APROXIMACIÓN ESPECTRAL. ............................................................................................................................38
4.13.1 Periodograma ..........................................................................................................................................39
4.13.2 Espectrograma.........................................................................................................................................39
4.14 APROXIMACIÓN CON WAVELET PACKETS ........................................................................................................40
viii
CAPÍTULO 5: INGENIERÍA CONCEPTUAL ......................................................................................................42
5.1 INTERFACES DISPONIBLES ..................................................................................................................................42
5.2 NUEVOS EQUIPOS ...............................................................................................................................................43
5.2.1 Componentes Principales ..........................................................................................................................43
5.2.1.1 Tareas Destacadas ........................................................................................................................................................ 45
5.2.1.2 Características .............................................................................................................................................................. 45
5.2.2 Principios Básicos para trabajar con Señales EMG en el Sierra Wave ...................................................46
5.2.3 Manipulando la información que provee el SW.........................................................................................49
CAPÍTULO 6: INGENIERÍA BÁSICA ...................................................................................................................51
6.1 BLOQUE I: ADQUISICIÓN ....................................................................................................................................52
6.1.1 Selección del grupo muscular ....................................................................................................................52
6.1.2 Criterios de adquisición.............................................................................................................................52
6.1.2.1 Ubicación de los electrodos......................................................................................................................................... 52
6.1.3 Acondicionamiento de EMG’s recibidas por los electrodos......................................................................53
6.2 BLOQUE II: AMPLIFICACIÓN ...............................................................................................................................55
6.2.1 Requerimientos ..........................................................................................................................................55
6.2.2 Propuestas para el amplificador................................................................................................................56
6.2.2.1 Propuesta N°1: Amplificador de instrumentación de 3 Operacionales con seguidores de voltaje........................ 56
6.2.2.2 Propuesta N°2: Amplificador diferencial de 3 Operacionales (3 etapas)................................................................ 58
6.2.2.3 Propuesta N° 3: Amplificador de instrumentación integrado .................................................................................. 59
6.2.3 Propuesta final...........................................................................................................................................60
6.3 BLOQUE III: FILTRADO .......................................................................................................................................60
6.3.1 Ruidos e interferencias ..............................................................................................................................60
6.3.2 Propuestas de filtrado................................................................................................................................61
6.3.2.1 Propuesta N° 1: Pasa banda (Pasa alto+Pasa bajo). Primer Orden. ......................................................................... 61
6.3.2.2. Propuesta N° 2: Pasa banda basado en OpAmp + Filtro Notch............................................................................... 62
6.3.2.3 Propuesta N° 3: Pasa banda basado en Circuitos Integrados (CI) ........................................................................... 66
6.3.3 Propuesta final...........................................................................................................................................67
6.3 BLOQUE IV: PROCESAMIENTO ............................................................................................................................68
CAPÍTULO 7: INGENIERÍA DE DETALLES ......................................................................................................70
7.1 BLOQUE I: ADQUISICIÓN ....................................................................................................................................70
7.1.1 Selección de electrodos..............................................................................................................................70
7.1.1.1 Características principales ........................................................................................................................................... 71
7.2 BLOQUE II: AMPLIFICACIÓN ...............................................................................................................................72
7.2.1 Selección del Amplificador ........................................................................................................................72
7.2.2 Características principales del Amplificador ............................................................................................72
7.2.3 Diseño del montaje para el bloque de Amplificación ................................................................................73
7.3 BLOQUE III: FILTRADO .......................................................................................................................................74
ix
7.3.1 Selección del CI .........................................................................................................................................74
7.3.2 Características principales del CI .............................................................................................................75
7.3.3 Diseño del montaje para el bloque de Filtrado. ........................................................................................76
7.4 BLOQUE IV: RECTIFICACIÓN ..............................................................................................................................77
7.5 BLOQUE V: PROCESAMIENTO .............................................................................................................................77
7.5.1. Características principales del PIC..........................................................................................................77
7.5.2. El Seudocódigo .........................................................................................................................................79
7.5.3. Fase Inicial ...............................................................................................................................................79
7.5.3.1 Calibración del Mínimo ............................................................................................................................................... 79
7.5.3.2 Calibración del Máximo .............................................................................................................................................. 80
7.5.4. Desarrollo.................................................................................................................................................81
7.5.5. Simulación del Seudocódigo .....................................................................................................................81
CAPÍTULO 8: ANÁLISIS DE RESULTADOS ......................................................................................................84
CONCLUSIONES Y RECOMENDACIONES .......................................................................................................90
REFERENCIAS .........................................................................................................................................................93
APÉNDICES...............................................................................................................................................................95
x
ÍNDICE DE TABLAS
Tabla 6.1 Parámetros guía para el diseño del filtro ....................................................................... 63
Tabla 6.2 Parámetros guía para el diseño del filtro G=10V/V ...................................................... 66
Tabla 7.1 Dimensiones en el electrodo 4040M[26] ...................................................................... 71
Tabla 7.2 Materiales en el electrodo 4040M[26] .......................................................................... 71
Tabla 7.3 Características eléctricas en el electrodo 4040M[26].................................................... 72
Tabla 7.4 Valores del par RG - G................................................................................................... 74
Tabla 7.5 Datos del TL084 [28] .................................................................................................... 76
Tabla 8.1 Valor promedio de los Parametros Medidos en la Aplicación ...................................... 87
xi
ÍNDICE DE FIGURAS
Figura 3.1 Ruido blanco gaussiano. [ 8]........................................................................................ 17
Figura 3.2. Ruido Artefacto – EMG. [ 8] ...................................................................................... 18
Figura 3.3 Ruido respiratorio. [ 8]................................................................................................. 18
Figura 3.4. Ruido red eléctrica [ 8]............................................................................................... 19
Figura 3.5. Atenuación de una señal[ 5]........................................................................................ 19
Figura 3.6. Amplificación de una señal. [ 8] ................................................................................ 20
Figura 4.1. Bomba Sodio-Potasio . [10] ........................................................................................ 23
Figura 4.2 Anatomía del músculo estriado esquelético. [11] ........................................................ 25
Figura 4.3. Acoplamiento excitación contracción del músculo esquelético.................................. 27
Figura 4.4. Elecromiografía con aguja[13].................................................................................... 28
Figura 4.5. Fibrilación de Unidad Motora .[13] ............................................................................ 29
Figura 4.6. Onda de respuesta de una unidad motora[13] ............................................................. 30
Figura 4.7. Formación de la señal EMG.[15]................................................................................ 32
Figura 4.8. Señal Electromiografica EMG vista es un osciloscopio ............................................. 33
Figura 4.9. Electrodos superficiales de ranura. ............................................................................. 35
Figura 4.10. Diagrama esquemático de los electrodos de aguja.[ 17]. .......................................... 35
Figura 4.11. Señal EMG típica durante una contracción muscular. .............................................. 36
Figura 5.1 Amplificador Diferencial de AM Systems................................................................... 42
Figura 5.2 Osciloscopio Digital..................................................................................................... 43
Figura 5.3 Base SW, Amplificador SW e ícono de acceso directo al Programa........................... 44
Figura 5.4 Conjunto de elementos del Sierra Wave [ 18] ............................................................. 44
Figura 5.5 Ventana de Recolección de datos del paciente ............................................................ 47
Figura 5.6 Elección del Músculo bajo estudio .............................................................................. 48
Figura 5.7 Ajuste del Amplificador del SW .................................................................................. 49
Figura 5.8 Importando desde el SW a otros programas. Izquierda: Archivo ASCII generado por el
programa SW abierto en Microsoft Excel. Derecha: Ploteo de los puntos leídos del archivo .wav
en Matlab....................................................................................................................................... 50
Figura 6.1 Diagrama de Bloques ................................................................................................... 51
Figura 6.2. Cable trenzado para evitar el ruido inductivo.[ 5] ...................................................... 54
Figura 6.3 Visualización de los electrodos en el Bíceps ............................................................... 54
xii
Figura 6.4 Principio de un Amplificador diferencial..................................................................... 56
Figura 6.5 Amplificador de instrumentación con seguidores de Voltaje ...................................... 57
Figura 6.6 Amplificador diferencial de 3 AO’s............................................................................. 58
Figura 6.7 Efecto del Offset en la entrada de cada etapa [25]. ...................................................... 59
Figura 6.8 Redes STC de tipo pasa alto y pasa bajo...................................................................... 61
Figura 6.9 Filtro Pasa Alto de 1er orden. Con fc=100 rad/seg...................................................... 62
Figura 6.10 Filtro Pasa alto ........................................................................................................... 63
Figura 6.11 Diagrama de Bode de Filtro Pasa Alto de 2do. Orden............................................... 64
Figura 6.12 Diagrama de Bode de un Filtro Pasa Bajo de 2do. Orden ......................................... 65
Figura 6.13 Filtro Notch @ 60hz................................................................................................... 66
Figura 6.14 Filtro Pasa banda. 4to. Orden Vs. 2do. Orden ........................................................... 67
Figura 7.1 Electrodos de Superficie Utilizados ............................................................................. 70
Figura 7.2 Circuito de prueba para el AD620 ............................................................................... 74
Figura 7.3 Resultado de la Simulación con RG=49.45 .................................................................. 74
Figura 7.4 Respuesta a un Pulso Cuadrado de 1V. de Tl084 Vs. LM 324. En la parte superior se
observan superpuestas la repuesta del Tl084 (azul) y la del LM324 (verde). ............................... 75
Figura 7.5 Pasabanda de 4to. Orden . (Fcinf= 100Hz Fcsup=500Hz).............................................. 76
Figura 7.6 Respuesta del Filtro con R y C comercial. Se observa la respuesta del filtro utilizando
el eje de ordenadas en decibeles (rojo) y la respuesta del filtro utilizando el eje de ordenadas
lineal (verde).................................................................................................................................. 77
Figura 7.7 Calibración a) Mínimo b) Máximo .............................................................................. 80
Figura 7.8 Obtención de Envolvente, Onda cuadrada y Triangular .............................................. 81
Figura 7.9 Resultado de la simulación: Salidas Ideales En Out1 y Out3 para una EMG real
rectificada. ..................................................................................................................................... 82
Figura 7.10 Envolvente de la Señal ............................................................................................... 83
Figura 7.11 Visualización ilustrada de la alimentación del futuro encapsulado y de cómo este no
funciona si la batería no es colocada en posición correcta. ........................................................... 83
Figura 8.1 Tres Esfuerzos consecutivos con filtro Pasabanda de 20-500Hz + Notch................... 85
Figura 8.2 Cuatro Esfuerzos consecutivos con filtro Pasabanda de 100-500Hz ........................... 85
Figura 8.3 Señal EMG del sujeto X1 a través del circuito final.................................................... 87
Figura 8.4 Estudio EMG del Sujeto X1 durante contracción muscular. El filtro pasabanda del SW
se fijó de 1-1KHz para que la comparación fuera lo más fiel posible, tomando en cuenta que para
la primera etapa de amplificación (AD620) la señal no ha pasado por el filtro diseñado............ 88
xiii
xiv
LISTA DE ABREVIATURAS Y TÉRMINOS
AAMI
Association
for
Advancement
of
Medical
Instrumentation
(Asociación para el avance de la instrumentación Médica)
AC
Alternate Current (Corriente Alterna)
ADC
Analog To Digital Converter (Conversor Digital Analógico)
ANSI
American National Standar Institution (Instituto Americano
Nacional de Estandares)
AO
Amplificador Operacional
AO's
Amplificadores Operacionales
CI
Circuito Integrado
CI’s
Circuitos Integrados
CMOS
MOS Complementario
CMRR
Commom Mode Rejection Ratio (Razón de Rechazo Modo Común)
DC
Direct Current (Corriente Directa)
DFT
Discret Fourier Transform (Transformada discreta de Fourier)
IEC
International Electrotechnical Commission (Comisión Internacional
Electrotécnica)
ECG
Electrocardiográficas
EMG
Electriomiográfica
EMG’s
Electriomiográficas
FUNINDES
Fundación de Investigación y Desarrollo de la Universidad Simón
Bolívar
G
Ganancia
Gd
Ganancia Diferencial
PB
Pasa Banda
PUM
Potencial de Unidad Motora
PVC
Policloruro de Vinilo
RISC
Reduced Instruction Set Computer ( Juego reducido de instrucciones
para el computador)
xv
SENIAM
Surface EMG for the Non-Invasive Assessment of Muscles
(Electomiografía de superficie para la evaluación no invasiva de los
músculos)
STC
Single Time Constant (Redes de una constante de tiempo)
SW
Sierra Wave
UGTS
Unidad de Gestión de Tecnologías en Salud
UM
Unidades Motoras
Vr
potenciales resultantes de ruido añadido
xvi
INTRODUCCIÓN
En los últimos años y alrededor del mundo se ha invertido un capital humano significativo en
la investigación, diseño y puesta en marcha de proyectos concernientes a la bioingeniería. Una de
las definiciones más aceptadas de Bioingeniería es aquella propuesta en 1972 por el "Committes
of the Engineer's Joint Council" de los Estados Unidos y dice que la Bioingeniería es la
aplicación de los conocimientos recabados de una fértil cruza entre la ciencia ingenieril y la
médica, tal que a través de ambas pueden ser plenamente utilizados para el beneficio del hombre
[1]. La bioingeniería se conoce como una de las disciplinas más jóvenes de la ingeniería en la que
los principios y herramientas de la ingeniería, ciencia y tecnología se aplican a los problemas
presentados por la biología y la medicina [2] y su desarrollo ha aportado grandes soluciones a la
humanidad en los diferentes aspectos que la componen. Pueden visualizarse cuatro ramas
mayores en el campo de la Bioingeniería: Biónica, Biología Aplicada, Ingeniería Biomédica,
Ingeniería Ambiental [3] y como resultado vemos ya en el mercado productos como prótesis para
extremidades superiores e inferiores, reemplazos o correcciones de ciertos aparatos biológicos
como los implantes de cóclea, implantes de retina, intervenciones quirúrgicas más rápidas y
precisas realizadas por robots (cirugía robótica), amplia evolución en equipos médicos para la
asistencia de rehabilitación de pacientes, entre otros avances que han mejorado la calidad de vida
de las personas beneficiadas. Es importante resaltar que los diversos trabajos de investigación se
han ido descentralizando cada vez más, apareciendo numerosos focos de producción en los
diferentes niveles (investigación, planteamiento, desarrollo, diseño, ejecución, pruebas,
mantenimiento) que lo requieren.
El presente trabajo de pasantía está enmarcado en este concepto de vanguardia y en respuesta a
los requerimientos exigidos por la Unidad de Gestión de Tecnologías en Salud, foco activo y
proactivo de bioingeniería en Venezuela, se plantea la realización del diseño de un dispositivo
electrónico que funcione como interfaz mioeléctrica. Dada la importancia del libre
desenvolvimiento que requiere el hombre para vivir, la presencia de alguna lesión del sistema
nervioso, amputaciones u otras discapacidades, puede traducirse, en muchos casos, en una cadena
degenerativa de su calidad de vida. Para solventar las dificultades de una amputación, desde hace
algún tiempo se utilizan prótesis electromecánicas, que constan principalmente de un cuerpo
mecánico que simula el movimiento natural asistido de sensores y/u otros componentes
electrónicos específicos para la parte del cuerpo en cuestión, a los que el usuario debe adaptarse
para hacer uso óptimo de la pieza. El dispositivo a diseñarse forma parte de una cadena de
investigación en el que se trabajará con señales del músculo utilizando hardware (circuito físico).
Eslabones anteriores de la cadena contemplan el trabajo con señales del músculo pero de forma
no simultanea (post procesamiento) a nivel de software (programas). El dispositivo como sistema
consta de dos elementos primordiales: entrada y salida, y permite la recepción de señales del
músculo (entrada) y con éstas arrojar señales (salida) que se puedan usar para controlar otras
aplicaciones promoviendo nuevas maneras de comunicarse y/o desenvolverse y estableciendo la
línea por la cual deben desarrollarse los próximos eslabones de dicha cadena. Las diferencias
fundamentales de este proyecto con otros de la misma índole, es que no limita (especifica) la
aplicación de la salida a obtener, permitiendo así manipularla de acuerdo a lo que requiera la
circunstancia, es adaptable al
usuario y no viceversa como es más común y se basa en
parámetros sencillos físicos y lógicos que favorezcan la reproducción a bajo costo y la
portabilidad del dispositivo
El trabajo de pasantía se basará y desarrollará siguiendo la siguiente estructura o pasos
planteados, con el objetivo de poder satisfacer las necesidades del mismo.
Ingeniería Conceptual (Fase de conceptualización): La ingeniería conceptual es la primera
etapa de un proyecto, después de que se ha planteado su necesidad. Contempla tanto el estudio de
la estructura del sistema, sus características principales, funcionamiento, el o los problemas a
resolver etc.
Ingeniería Básica (Fase de definición): A continuación se debe realizar una caracterización
del funcionamiento del sistema en base a conocimientos prácticos y teóricos previos, para así
obtener información que permita establecer modelos, parámetros y propuestas de diseño (en
todos sus sentidos) que contemplen la solución del problema planteado.
Ingeniería de Detalle (Fase de implantación): Contempla llevar las soluciones de diseño
propuestas en la ingeniería básica, al plano real; es decir, configurar dichas soluciones en
plataformas de software, hardware etc. Y adaptar el modelo establecido a las exigencias de los
sistemas a emplear.
2
3
CAPÍTULO 1
PLANTEAMIENTO DEL PROBLEMA
1.1 Antecedentes
Al surgir el planteamiento del diseño de un dispositivo que permitiese desarrollar una interfaz
electromiográfica (EMG), se debió realizar un estudio sobre trabajos con características similares
en donde los autores hayan expuesto experiencias en su desarrollo.
Es extensa la cantidad de estudios y proyectos realizados por particulares e instituciones
públicas y privadas entorno al procesamiento, adquisición y aplicación de señales EMG. En la
búsqueda de antecedentes, se encuentran muchos trabajos orientados al control de prótesis
transfemorales y ‘del brazo’ a partir de EMG’s:
Grupos de investigación del Centro de Investigación Biomédica de la Universidad de
Delaware y el grupo de Ciencias de Ejercicio y Movimiento Humano de la Universidad de Oeste
de Australia (University of Western Australia), en esta investigación plantean y desarrollan un
control en tiempo real de un brazo virtual (flexión y extensión del codo) a través de la señal EMG
del brazo de una persona sana, como propósito del estudio del control neuromuscular de los
movimientos del brazo, logrando la interacción de manera artificial con la imagen mostrada en la
pantalla del computador, concluyendo con la propuesta de implementar este trabajo para
examinar cómo el sistema neuromuscular compensa la pérdida parcial o total de la habilidad de
los músculos para generar la fuerza después de un trauma. [4]
La tesis de postgrado presentada en la Universidad Simón Bolívar en el año 2007 y
denominada “Desarrollo de un algoritmo para generar una señal de control para una prótesis,
basado en el procesamiento y análisis de una señal EMG” desarrollado por el Ing. Omar
Leonardo Tolosa Rodríguez, resulta base importante de este trabajo, pues en ella se aclaran y
utilizan distintas características de las EMG como amplitud, filtraje y rango de frecuencia
eficiente para su manipulación. Entre las conclusiones a las que se llegan en dicha tesis se
encuentran que:
Una señal EMG obtenida de cualquier músculo del cuerpo del paciente puede emplearse
como medio de control, no sólo de un sistema eléctrico para activar o desactivar un bloqueo
de una prótesis de pierna, sino de cualquier sistema en general, siempre y cuando se tenga
control voluntario sobre el músculo.
Haciendo uso del algoritmo planteado en la investigación, es posible generar una señal de
control de cualquier sistema, usando las señales EMG de los músculos del recto femoral y del
bíceps femoral.
Basta con obtener la envolvente de una señal EMG y un punto umbral para activar la salida
del sistema de control planteado. El algoritmo propuesto, se considera un algoritmo sencillo
por la matemática básica utilizada, lo que hace que se pueda almacenar en un
microcontrolador de uso común, tal como un Atmel o PIC18Fxxxx.[ 5]
Actualmente se está desarrollando una prótesis de pierna electro-mecánica como tesis doctoral
en la Universidad Simón Bolívar por el Ing. Rafael Torrealba, por lo que el diseño planteado en
este trabajo pudiera servir como complemento del bloque que contempla la interfaz humanoprótesis.
1.2 Justificación
Las señales electromiográficas (EMG) no solamente contienen una gran variedad de
información, sino que también poseen un potencial enorme para controlar dispositivos
electromecánicos (por ejemplo, prótesis); al mismo tiempo se ha encontrado que se presentan
varios problemas asociados a la adquisición y procesamiento de dichas señales; en este aspecto
recae la importancia de su estudio.
Existen en el mercado dispositivos que ya trabajan y/o controlan otros aparatos a partir de
señales EMG, pero estos tienden a ser herramientas sofisticadas que requieren alto entrenamiento
5
del usuario para un resultado eficiente, en este trabajo de grado se plantea la realización de un
diseño de bajo costo en el que el usuario tiene control en la manipulación del dispositivo,
adaptándose siempre este último al primero y no viceversa y que además continúe la cadena
investigativa de la empresa en torno a este tema iniciada con la tesis de postgrado del Ing. Omar
Tolosa.
1.3 Objetivo General
Diseñar un dispositivo electrónico capaz de generar una señal de control para manejar una
interfaz mioeléctrica a partir de la recepción de señales electromiográficas (EMG)
1.4 Objetivos Específicos
Recopilar información sobre señales electromiográficas (EMG’s), (definiciones, orígenes
adquisición, procesamiento…).
Recopilar información de investigaciones diversas realizadas entorno a la adquisición de
EMG’s para el control de dispositivos electromecánicos como prótesis.
Estudiar las características de diversos componentes electrónicos involucrados en la
realización de interfaces mioeléctricas disponibles en la actualidad.
Comparar de acuerdo a sus características las ventajas o desventajas de cada componente y así
definir cuál de éstos se adecua mejor a las necesidades de la UGTS.
Estudiar el manejo del microprocesador PIC16f877 y el lenguaje PICbasic que utiliza para ser
programado.
Estudiar el manejo de los softwares o programas y equipos disponibles en la UGTS para
realizar pruebas y simulaciones relacionadas con la adquisión de biopotenciales (SierraWave
Unit, SierraWave Software).
Seleccionar los componentes a utilizar para el montaje.
6
Diseñar el diagrama circuital a utilizar para realizar el montaje del dispositivo.
Simular la respuesta del diseño obtenido para el dispositivo mediante utilización de softwares
de simulación.
1.5 Alcance y Limitaciones:
1.5.1 Alcance
Con el presente trabajo se pretende obtener un diseño de un dispositivo electrónico lo más
sencillo posible, el cual pueda ser versátil en cuanto a la aplicación de la salida de control que se
obtenga a partir de procesar una señal EMG.
Además se pretende adquirir las señales EMG realizando tensión y relajación del brazo para
definir el momento en el que se realiza el esfuerzo usando únicamente la señal EMG a través de
hardware (circuito físico), puesto que en trabajos anteriores se ha trabajado con señales EMG
pero de forma no simultanea (post procesamiento) a nivel de software (programas).
Se espera llevar acabo el procesamiento y análisis de las señales EMG adquiridas, a través de
diversos softwares adecuados para esto y luego establecer las posibilidades reales de controlar
otros dispositivos como prótesis.
1.5.2 Limitaciones
Entendiendo la teoría de propagación de las señales EMG y sabiendo que la misma se
caracteriza por ser una señal ruidosa, se hace complicado estudiar la morfología de la señal, por
lo que se tomó únicamente como estudio la envolvente de la onda en las fases de reposo y
esfuerzo.
7
Entre las limitaciones de la investigación estuvo la imposibilidad de hacer pruebas de
aplicación en físico con la salida de control obtenida.
8
CAPÍTULO 2
ENTORNO EMPRESARIAL
2.1 La Empresa
La Unidad de Gestión de Tecnología en Salud (UGTS), es una unidad operativa orientada a
desarrollar de manera integral y exclusiva, la ejecución de proyectos de Ingeniería en el área de
salud, adscrita a la Fundación de Investigación y Desarrollo (FUNINDES) de la Universidad
Simón Bolívar (USB).
Conformada por un equipo de profesionales responsables en la promoción, negociación,
coordinación y ejecución de proyectos en las áreas de Ingeniería Clínica, Ingeniería Biomédica,
Biofísica y Física Médica a nivel Nacional, fomentando así el vínculo inter y transdisciplinario
entre la Biología, la Física, la Medicina y la Ingeniería .
Bajo estas premisas la UGTS promueve el convertir a la Universidad Simón Bolívar en un
ente promotor de cambio dentro del Sector Salud Venezolano.
2.2 Reseña Histórica
La UGTS se constituyo en el año 1993, iniciando su actividad como Unidad de Gestión con un
proyecto denominado Plan de Equipamiento para los Ambulatorios de la Red Programa de
Atención Materno Infantil (PAMI), luego continuó con el Hospital de Niños J.M de los Ríos.
Desde 1993, la UGTS ha ejecutado más de 32 proyectos de Ingeniería Clínica para
instituciones públicas y privadas por un monto total que sobrepasa los mil millones de bolívares.
Vale la pena destacar que parte de los ingresos obtenidos a través de estos proyectos se han
reinvertido en la dotación de equipos para el Laboratorio de Biofísica, así como la adecuación y
amoblado del espacio físico de la Unidad.
Mediante convenios suscritos con el Ministerio de Salud y Desarrollo Social (MSDS), el
Instituto Venezolano de los Seguros Sociales (IVSS) y la Corporación de Salud (estado Miranda
y Aragua), entre otros; la UGTS ha liderizado la ejecución y dirección de diversos proyectos en
los hospitales adscritos a las instituciones antes citadas. Además, continuamente brinda asesoría y
apoyo en el área de salud en pro de garantizar servicios de calidad y con un alto compromiso
social.
2.3 Misión
Promover la modificación radical de la estructura organizacional de las instituciones médicoasistenciales, siguiendo el planteamiento de clasificación de los factores que inciden en el
funcionamiento de los sistemas de salud en (a) factores médico-biológicos, (b) factores médicoadministrativos y (c) factores médico-tecnológicos.
2.4 Visión
Implantar la Gestión Tecnológica (Ingeniería Clínica) como parte indiscutible e insustituible
de la organización de toda Institución prestataria de Salud.
2.5 Objetivos y Principios
2.5.1 Objetivos
Brindar asistencia técnica y asesoría a las instituciones prestarías de salud (públicas o
privadas), aportándoles soluciones a los problemas que enfrentan en relación con las
tecnologías que disponen (infraestructura, instalaciones industriales, equipamiento médico,
redes de comunicación, hotelería clínica o servicios públicos, entre otros).
Garantizar, desde el punto de vista de ingeniería, la calidad de la atención médica prestada
mediante el uso seguro y eficiente de cada una de las tecnologías usadas para el diagnóstico,
monitoreo y tratamiento de los pacientes atendidos en dichos centros.
10
Difundir los conocimientos en el área a través de postgrados, diplomados, cursos o talleres
para el personal del área de ingeniería o áreas conexas, exhortándolos a velar por el óptimo
funcionamiento del equipamiento industrial y la planta física, de los centros de salud del país.
Todo lo anterior se sustenta en la implantación de una adecuada gestión de tecnologías a
través de la Ingeniería Clínica.
2.5.2 Principios :
La Unidad de Gestión de Tecnología en Salud se sustenta en los siguientes principios:
¢
¢
¢
Enfoque en el cliente.
Liderazgo en el mercado mediante el mejoramiento continúo de nuestros conocimientos.
Participación de los diversos actores que hacen vida en el sistema de salud, tanto nacional
como internacional.
¢
¢
Enfoque basado en procesos por evidencia.
Relaciones mutuamente beneficiosas con nuestros clientes y proveedores.
2.6 Logros
Algunos de los logros más significantes de la UGTS son:
¢
Definición del Sistema Nacional de Gestión Tecnológica y estructuración de la Dirección
de Gestión Tecnológica como ente rector del Sistema para el Ministerio de Salud y
Desarrollo Social.
¢
Definición e implantación de la Subdirección de Ingeniería Clínica, acorde al nuevo
Reglamento General de Hospitales para el IVSS.
¢
¢
¢
Definición de la Dirección Regional de Gestión Tecnológica en el Estado Miranda.
Diseño de un hospital de TraumaShock, para el Estado Aragua.
Convenios internacionales con la Organización Panamericana de la Salud y con el
American College of Clinical Engineering.[6]
11
12
CAPÍTULO 3
MARCO TEÓRICO: FUNDAMENTOS DE COMUNICACIONES
3.1 Señal
Es la variación cuantitativa de una dimensión o variable en el transcurso del tiempo, la cual
puede ser representada por una forma de onda.
3.1.1 Principales características de las señales
Existen diversos factores que afectan y pueden estar presentes en una señal, entre las más
comunes tenemos:
¢
Frecuencia de la señal, es el número de ocurrencias de un evento repetido en una unidad de
tiempo.
¢
¢
¢
¢
¢
¢
Potencia de la señal.
Continuidad de una señal.
Pueden ser periódicas y aperiódicas.
Simetría.
Dimensionalidad de la señal.
Otras.
3.2 Señales estacionarias
Son aquellas que se observan cuando se mide una determinada propiedad o característica de
un sistema, con cuya medida se construye una función en el tiempo. Es muy importante
determinar algunas propiedades básicas de dicha función, una de ellas es la estacionariedad.
Estrictamente hablando, para poder concluir la estacionariedad de una señal es necesario hacer
distintas mediciones sobre el mismo fenómeno (por ejemplo, grabación simultánea de varios
canales electrocardiográfos), constituyendo entonces un proceso {x(t)} formado por un conjunto
de funciones x1(t),….,xn(t). El proceso sería estacionario si al determinar cualquier propiedad
estadística el tiempo no influye en el resultado. Si esta condición sólo se cumple para la media y
la autocorrelación el proceso se denominará débilmente estacionario, mientras que si se cumple
también para los momentos de mayor orden entonces será fuertemente estacionario.
De esto se deduce, que para poder concluir la estacionariedad de una señal se necesita realizar
varias medidas simultáneas del mismo fenómeno ¿Qué ocurre entonces cuando esto no es
posible? En este caso la interpretación del concepto de estacionariedad es diferente. En
conclusión, una señal se considerará estacionaria cuando las propiedades calculadas sobre
intervalos pequeños no varían significativamente de un intervalo a otro. Por lo que, el término
significativamente debe interpretarse como “mayor de lo esperado desde un punto de vista
estadístico”.
3.3 Señales continuas
Dada una función de varias variables es posible, mediante una transformación matemática,
expresarla como una función de otras variables sin perder en absoluto la información
proporcionada por dicha señal. Esto ocurre, por ejemplo, cuando se hace un cambio de
coordenadas cartesianas a polares. Uno de estos cambios, es el que permite transformar una
función del tiempo x(t) en una función de la frecuencia X(f).
Cuando Fourier (1768-1830) postuló que cualquier función del tiempo continua y periódica
podía ser representada como la suma de una serie de sinusoides, creó una herramienta de trabajo
muy útil para analizar las características de una señal.
Matemáticamente esto se puede expresar diciendo que si x(t) es una función del tiempo
continua y periódica, con período T, entonces admite la siguiente expresión:
14
siendo:
x(t ) =
∞
∑F
k = −∞
1
Fk =
T
K
e j 2πkfot
T /2
∫ x(t )e
− j 2πkfot
Ecuación 3.1.a
dt
Ecuación 3.1.b
−T / 2
y teniendo en cuenta que e jx = cos( x ) + jsen( x ) y que fo = 1 / T
Este desarrollo de una función continua y periódica se denomina desarrollo en serie de
Fourier. Sin embargo, dentro de las funciones continúas del tiempo, las funciones periódicas no
son más que un subgrupo, ya que existen otras muchas funciones que carecen de esta propiedad.
A estas señales no es posible aplicarles directamente el desarrollo en serie de Fourier para tratar
de conocer su espectro, debido a que para ello es condición indispensable la existencia de un
período finito, T, para la señal. En cierto modo se puede considerar que las señales no periódicas
son aquellas cuyo período es 1.
Para obtener el espectro de una señal arbitraria continua en el tiempo se debe aplicar la
denominada transformada de Fourier, que no es más que la extensión de las series de Fourier al
caso T = 1, con lo cual las integrales que antes iban desde –T/2 hasta T/2 ahora irán desde -∞
hasta ∞ y kf0 se transforma en la variable continua f. La expresión correspondiente a dicha
transformada será:
∞
F( f ) =
∫ x(t )e
− j 2πft
dt
Ecuación 3.1.a
−∞
x(t ) =
∞
∫ F ( f )e
j 2πft
df
Ecuación 3.2.b
−∞
La primera ecuación corresponde a la transformada directa, que permite obtener el espectro de
una función x(t), y la segunda corresponde a la transformada inversa, que permite reconstruir una
señal a partir de su espectro de frecuencia.
La función [F(f)]2 se conoce normalmente como función de densidad espectral, ya que puede
interpretarse como la energía de la señal asociada con el rango de frecuencias (f; f + df) o,
15
hablando en un sentido estadístico, correspondería a la contribución de la varianza de x(t) para
frecuencias en el rango (f; f + df).
3.4 Señales discretas
Se definen como la adquisición de una muestra de datos en tiempo igualmente espaciados. En
el caso que se desee usar el ordenador para el análisis de señales la única forma de poder
introducir una señal analógica en el ordenador para su posterior procesado es tomando muestras
y digitalizándolas, es decir, guardando el valor digital de la señal cada cierto tiempo Tm,
denominado período de muestreo.
En realidad el proceso de muestreo puede interpretarse como la multiplicación de la señal
continua de partida, x(t), por una serie de funciones delta de Dirac desplazadas en el tiempo en
múltiplos de Tm. Es decir:
∞
x (t ) =
∑ x(n)δ (t − nΤ
m
n = −∞
)
Ecuación 3.2
y a esta señal continua se le puede aplicar la transformada de Fourier. Haciendo el
correspondiente desarrollo matemático quedará para la expresión de la transformada de Fourier
de señales discretas la siguiente expresión:
∞
∑ x ( k )e
X(f )=
− jk 2πf / fm
k = −∞
Ecuación 3.3
siendo fm = 1/Tm. Para la transformada inversa se obtendría la expresión:
1
x( k ) =
2π
fm
jk 2πf / f
∫ X ( f )e m df
Ecuación 3.4
0
Utilizando esta propiedad en las ecuaciones 3.1.a y 3.1.b llegaríamos a obtener para este caso
las expresiones:
x ( n) =
fm
N
N −1
∑ F ( k )e
k =0
j
2πfm
kn
N
Ecuación 3.5.a
16
Ecuación 3.6.b
N −1
F ( k ) = ∑ x( n)e
−j
2πfm
kn
N
n =0
donde se ha sustituido f0, la frecuencia fundamental, por su valor, en este caso, fm/N. Este par de
expresiones se conocen como transformada de Fourier discreta o por sus siglas en inglés DFT
(Discrete Fourier Transform).
El cálculo directo de la DFT es bastante costoso computacionalmente. Si se analiza con detalle
su implementación se obtendrá que para calcular una DFT de n puntos se necesita realizar N2
multiplicaciones complejas y N(N – 1) sumas complejas. Esto hace que éste sea un algoritmo de
complejidad O(n2). [7]
3.5 Ruido en una señal
El ruido es una fluctuación inducida en la señal por factores externos. Para ello, se aplican
filtros sobre la señal que posee ruido para eliminar los armónicos no deseados, también conocido
como cancelación de ruido.
3.5.1 Tipos de ruidos
¢
Ruido blanco gaussiano, es una señal aleatoria que se caracteriza porque sus valores de
señal en dos instantes de tiempo diferentes no guardan correlación estadística (Figura 3.1).
Figura 3.1 Ruido blanco gaussiano. [ 8].
17
¢
Artefacto o Ruido EMG: es la señal producto del movimiento del paciente, derivada de la
señal EMG (Figura 3.2).
Figura 3.2. Ruido Artefacto – EMG. [ 8]
¢
Ruido respiratorio, se genera en el momento que se lleva acabo dicho proceso, su incidencia
ocurre sobre la frecuencia de la línea de base de la señal fisiológica en estudio. Su frecuencia
se encuentra entre los :0,1 – 2 Hertz [Hz] (Figura 3.3).
Figura 3.3 Ruido respiratorio. [ 8]
18
¢
Ruido de la Red Eléctrica, es una señal inducida por la red eléctrica a través de la
alimentación del sistema de adquisición de las señales fisiológica, por lo general su
frecuencia está entre los (50 – 60)Hz (Figura 3.4).
Figura 3.4. Ruido red eléctrica [ 8]
3.6 Atenuación
Es la perdida de potencia de la señal, puede ser inducida por un ruido, así como también por el
medio por donde viaja la señal, ya que el mismo resta potencia a la señal debido a su resistividad
(Figura 3.5).
Figura 3.5. Atenuación de una señal[ 5]
19
3.7 Amplificación
El proceso de amplificación de una señal, consiste en aumentar n-veces su valor cuantitativo,
logrando de esta manera el incremento del potencial, obteniendo una ganancia en la señal (Figura
3.6).
Figura 3.6. Amplificación de una señal. [ 8]
3.8 Filtros
Los filtros son redes que dejan pasar o detienen el paso de una gama de frecuencias específica.
La terminología utilizada indica sus funciones esenciales, así existen filtros pasabanda, rechaza
banda, pasa altos, pasa bajos, etc.
3.8.1 Filtro Butterworth
Este filtro exhibe una transmisión que decrece en forma monótona con todos los ceros de
transmisión en ω=∞, haciéndolo un filtro para todo polo. La función de magnitud para un filtro
Butterworth de N-ésimo orden con un borde de banda pasante ωp está dado por: [9]
T ( jω ) =
1
ω 2N
1+ ε 2(
)
ωp
Ecuación 3.6
Entonces el parámetro ε determina la máxima variación en transmisión de banda pasante,
Amáx, según Amáx = 20 log 1 + ε 2 Por el contrario, dada Amáx el valor de ε se puede
20
determinar con ε = 10 Amáx / 10 − 1 . En la respuesta de Butterworth, la máxima desviación en la
transmisión de banda pasante ocurre sólo en el borde de la banda pasante. Esta propiedad hace la
respuesta del filtro Butterworth muy plana cerca de ω=0 y da a la respuesta el nombre de
respuesta máximamente plana. El grado de planeidad de la banda pasante aumenta a medida que
aumenta el orden B, como se puede ver en la figura X, también a medida que N aumenta, la
respuesta del filtro se aproxima a la respuesta del tipo de pared de ladrillo.
La siguiente ecuación se puede utilizar para determinar el orden del filtro requerido de filtro,
que es el mínimo valor entero de N que produce A(ω s ) ≥ Amin [9].
ω
A(ω s ) = 10 log 1 + ε 2 ( ) 2 N
ωp
21
Ecuación 3.7
CAPÍTULO 4
MARCO TEÓRICO: FUNDAMENTOS DE ELECTROFISIOLOGÍA
4.1 Electrofisiología
La base de toda exploración electrofisiológica es el registro de los potenciales de las células
excitables. La electromiografía se ocupa del registro de dichos potenciales evocados
voluntariamente en el músculo y la electroneurografía de los potenciales evocados tanto sobre el
músculo como sobre los troncos nerviosos por estimulación, en general eléctrica, sobre los
nervios que mantienen conexión anatómica o funcional con la zona de registro.
Las propiedades eléctricas de las fibras excitables, nerviosas y musculares, derivan de la
existencia de una membrana semipermeable que separa fluidos intracelulares y extracelulares con
diferente concentración iónica que origina un potencial transmembrana. El espacio intracelular
del axón contiene una alta concentración de ión potasio K+ y otros aniones así como de
aminoácidos y proteínas de carga negativa y en el espacio extracelular predomina el ión sodio
(Na+) y el ión cloro (Cl-). Así mismo, la membrana celular en reposo presenta impermeabilidad,
tanto para las moléculas proteicas como para algunos iones, lo que causa el mantenimiento de la
diferencia de potencial entre ambos lados, negativa en el interior, de unos -70 a -90 milivoltios
[mV]. Potenciales electrotónicos de suficiente intensidad en la membrana axonal inducen
cambios en la actividad de los canales específicos lo que permite el paso de los iones,
fundamentalmente del Na+, a través de la membrana.
Se generan de este modo, potenciales de acción que suceden a la inversión de la carga eléctrica
entre ambos lados de la membrana, situándose en los +30mV, correspondientes al potencial de
equilibrio para el Na+. Así, la bomba de Na+-K+ es capaz posteriormente, de reequilibrar la
concentración iónica transportándolos contra gradiente en un sistema que consume energía. El
potencial de acción creado es capaz entonces, de inducir corrientes electrotónicas en la membrana
que generan en las zonas inmediatamente cercanas al mismo, procesos de cambios estructurales
en los canales iónicos que dependen del voltaje (Figura 4.1). Se produce así, un nuevo potencial
de acción que de esta forma se propaga a lo largo del axón o de la fibra muscular.
Fisiológicamente, la propagación sólo puede desarrollarse en un sentido, puesto que la zona
despolarizada permanece incapaz de sufrir el mismo cambio, durante un periodo refractario
absoluto de 1 milisegundo aproximadamente. Por otro lado, la excitación artificial en un punto
mediante un estímulo eléctrico por ejemplo, es capaz de causar propagación de dicha excitación
en los dos sentidos, el drómico y el antidrómico, puesto que, los potenciales de acción sobre los
tejidos excitables pueden ser registrados mediante electrodos cercanos y amplificarse las señales
en un osciloscopio para su medición. En conclusión, todo potencial registrado es siempre una
diferencia de potencial entre dos áreas de captación que observan el foco generador desde
perspectivas distintas.
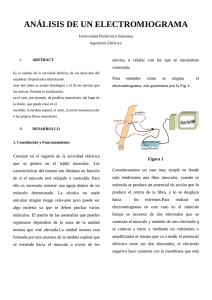
Figura 4.1. Bomba Sodio-Potasio . [10]
4.2 Registro Electrofisiológico
El registro electrofisiológico se emplea para capturar el potencial eléctrico de un sistema
fisiológico. Existen distintos modos de registro, se dice que un registro se llama “monopolar”
cuando uno de los electrodos no es influenciado por el foco generador y “bipolar” cuando ambos
23
lo son de modo idéntico, aunque de forma sucesiva al medir un potencial que se propaga a lo
largo de un axón o de una fibra por debajo de ellos. Ambos electrodos, otorgan una polaridad
inversa al potencial captado. Se ha convenido en llamar “negativo” al primero (registro bipolar) o
al único (monopolar) que capta dicho potencial. Asimismo, se ha convenido en neurofisiología en
otorgar al electrodo “negativo” la entrada en el amplificador que determina movimientos hacia
arriba de la línea del osciloscopio y lo inverso para el “positivo”.
4.3 Velocidad de Propagación Electrofisiológica
La velocidad de propagación del impulso depende de la resistencia interna de la fibra, de
su capacitancia y de su conductancia. La resistencia está muy relacionada con su diámetro y la
facilidad para el flujo de corriente (capacitancia, conductancia) con las características de
excitabilidad de la membrana. En las fibras amielínicas, entre 0,4 y 3 micras, la velocidad de
conducción depende casi exclusivamente de su diámetro, siendo ésta muy lenta al producirse en
continuidad. En las fibras mielinizadas la disminución de capacitancia y conductancia en las
zonas internodales, cubiertas de mielina, permite que la velocidad de conducción no dependa
solamente del diámetro de la fibra y que pueda ser muy alta con diámetros relativamente
pequeños. La propagación en este caso se produce a saltos entre los segmentos "amielínicos" de
los nodos. Existe una proporción ideal entre el tamaño del axón y el grosor de la mielina
(diámetro de la fibra nerviosa completa) que permite una conducción óptima, expresada como el
cociente entre ambos o constante "g" cuyo valor es de 0,6. La relación entre la velocidad de
conducción y el diámetro de la fibra nerviosa también guarda fisiológicamente una relación
(metros por segundo/micras) que es de 4,5 para las fibras de pequeño diámetro (menos de 8
micras) y de 5,7 para las mayores. [10]
4.4 Músculo esquelético
Los músculos estriados esqueléticos, están constituidos por células alargadas: las fibras
musculares, estas fibras, que se organizan en fascículos, se unifican por medio de envolturas
elásticas. Cada fibra muscular presenta numerosos núcleos distribuidos en la periferia de la
célula. Está delimitada por una membrana (sarcolema) y contiene en su citoplasma (sarcoplasma)
unas miofibrillas responsables de la contracción muscular. Las miofibrillas presentan una
24
estructura filamentosa regular (miofilamentos) que confiere al músculo ese aspecto estriado que
se observa al microscopio. Una fibra muscular es el resultado de la unión de varias células no
diferenciadas con un único núcleo denominada mioblasto. El miotubo, formado por la unión de
los mioblastos, se caracteriza por presentar sus núcleos en posición central. Después, durante la
diferenciación del miotubo en fibra muscular, los núcleos van a situarse en la periferia de la
célula muscular.
El cuerpo humano está formado aproximadamente de un 40% de este tipo de músculo y un
10% de músculo cardíaco y visceral. Son, generalmente, de contracción voluntaria (a través de
inervación nerviosa), aunque pueden contraerse involuntariamente. Cada músculo se inserta en el
hueso por medio de los tendones (Ver Figura 4.2), que están constituidos básicamente por tejido
fibroso, elástico y sólido. [11]
Figura 4.2 Anatomía del músculo estriado esquelético. [11]
25
4.5 Características funcionales del Músculo
4.5.1 Excitabilidad
Es la facultad de percibir un estímulo y responder al mismo. Por lo que se refiere a los
músculos esqueléticos, el estímulo es de naturaleza química: la acetilcolina liberada por la
terminación nerviosa motora. La respuesta de la fibra muscular es la producción y la propagación
a lo largo de su membrana de una corriente eléctrica (potencial de acción) que origina la
contracción muscular.
4.5.2 Elasticidad
La elasticidad es una propiedad física del músculo. Es la capacidad que tienen las fibras
musculares para acortarse y recuperar su longitud de descanso, después del estiramiento. La
elasticidad desempeña un papel de amortiguador cuando se producen variaciones bruscas de la
contracción.
4.5.3 Extensibilidad
Es la facultad de estiramiento. Si bien las fibras musculares cuando se contraen, se acortan,
cuando se relajan, pueden estirarse más allá de la longitud de descanso.
4.5.4 Plasticidad
El músculo tiene la propiedad de modificar su estructura en función del trabajo que efectúa. Se
adapta al tipo de esfuerzo en función del tipo de entrenamiento (o de uso). Así, se puede hacer un
músculo más resistente o más fuerte. Los velocistas, tienen en los miembros inferiores un
predominio de fibras musculares de tipo «rápido», mientras que en los corredores de maratón,
prevalecen las fibras musculares de tipo «lento».
26
4.5.5 Contractibilidad
Es la capacidad de contraerse con fuerza ante el estímulo apropiado. Esta propiedad es
específica del tejido muscular. [11]
Se observa en la figura (Figura 4.3) que al ocurrir un potencial de acción, el impulso viaja a
través del túbulo transverso (T-tubule), existe una estructura que censa la despolarización
ocurrida, el receptor de Dihidropiridina (DHP) por su juntura mecánica con el receptor de
Rianodina (Ry1, tipo 1 porque es músculo esquelético), da la ‘orden’ a éste último de abrirse y al
abrirse libera Ca2+ del retículo sarcoplásmático y viaja a la maquinaria contráctil, originándose así
la contracción muscular.[12].
Figura 4.3. Acoplamiento excitación contracción del músculo esquelético.
4.6 Electromiografía
Es el estudio de la actividad eléctrica propagada a través de las fibras musculares. Para
realizar dicho estudio es necesario emplear electrodos, pudieran ser de agujas, los cuales son
totalmente invasivos o electrodos de superficies no invasivos.
27
Salvo para el llamado “ruido de placa” y para la actividad de inserción de la aguja, no debe
existir actividad eléctrica en el músculo relajado (Figura 4.4).
Figura 4.4. Elecromiografía con aguja[13]
La fibrilación y las ondas positivas son descargas espontáneas anormales que se producen en
cualquier situación en la que una fibra muscular está denervada.
Aparecen habitualmente en los trastornos neurogénicos (enfermedades de neurona motora
inferior, radiculopatías, plexopatías y neuropatías) y señalan la presencia de degeneración axonal,
pero también pueden verse en miopatías, especialmente en las inflamatorias y distróficas.
Las fibrilaciones consisten en potenciales de una sola fibra muscular que bate de forma
repetida a una frecuencia regular decreciente, por lo que las características morfológicas y de su
sonido en el instrumento de EMG permiten su reconocimiento indudable. Su duración, registrada
con aguja coaxial, se halla entre 1 y 5 milisegundos (mseg.). Su deflexión inicial es positiva
(Figura 4.5).
Las ondas positivas, por su parte, tienen el mismo significado fisiopatológico, su ritmo es
similar, el sonido característico y consisten en una deflexión positiva brusca con una muy lenta
recuperación a la isoleléctrica. Corresponden a la fibrilación de una fibra muscular degenerada en
uno de sus extremos. La hiperexcitabilidad de la membrana sarcolémica que causa este tipo de
actividad espontánea, puede ser también responsable de las descargas de alta frecuencia
28
(descargas bizarras o pseudomiotónicas) debidas al cierre de circuitos de excitación efáptica entre
fibras.
Figura 4.5. Fibrilación de Unidad Motora .[13]
4.7 Potencial de Unidad Motora
Las Unidades Motoras (UM ó mu por sus siglas en ingles) están constituidas por la neurona
motora, su axón y ramificaciones dístales, las placas motoras y todas las fibras musculares que
dependen de ella. Se activa por completo en una respuesta de todo o nada.
El número de fibras por Unidad Motora (razón de inervación) varía entre 1-10 en los músculos
extraoculares, faringeos o craneales a varios cientos para los músculos tónicos axiales. La
actividad eléctrica de todas las fibras musculares se suma en el registro con la aguja coaxial para
constituir el Potencial de Unidad Motora (PUM).
El tamaño de un PUM está relacionado con el diámetro del axón motor, su grosor de
mielina y con la velocidad de conducción de la fibra nerviosa, umbral de despolarización y tipo
de fibras musculares inervadas. Las UM pequeñas se asocian a fibras musculares del tipo I
(contracción lenta, metabolismo oxidativo, resistentes a la fatiga) que tienen un bajo umbral de
excitación y se contraen precozmente en la actividad voluntaria. Las UM de tamaño
progresivamente mayor se reclutan también a grados mayores de contracción de forma que
raramente en una exploración electrofisiológica pueden ser observados aisladamente potenciales
pertenecientes a UM del tipo II (contracción rápida, metabolismo glicolítico, fácilmente
fatigables).
29
La frecuencia de disparo de las UM lentas está por debajo de los 30Hz, en tanto las UM
fásicas pueden alcanzar frecuencias mucho mayores. Los estudios EMG no permiten valorar
habitualmente este dato, puesto que el incremento de frecuencia de una UM activa pronto es
ocultado por la detección de otras UM vecinas batiendo a su propia frecuencia (Figura 4.6).
Figura 4.6. Onda de respuesta de una unidad motora[13]
Las características morfológicas de los PUM deben ser analizadas durante el estudio
electrofisiológico.
La duración se define como el tiempo desde la deflexión inicial al retorno a la línea de base y
refleja el número y dispersión espacial de las fibras musculares de la UM. Los valores normales
medios se hallan entre 5 y 15 mseg., pero varían para cada músculo, edad y temperatura.
La amplitud del PUM se mide entre pico y pico y corresponde a la actividad de un relativo
escaso número de fibras musculares cercanas a la punta de la aguja. Normalmente mide entre 0,2
y 3 milivoltios. Sin embargo, cuando existe reinervación colateral (agrupación por tipos en el
estudio histoquímico del músculo), el mayor número de fibras de la misma UM agrupadas en un
territorio causa un aumento de la amplitud del PUM. En los estudios con electrodo de monofibra
se observa en este caso un aumento de la Densidad de Fibras.
30
Las fases del PUM corresponden al número de cruces por la isoeléctrica mas uno, es decir, la
cantidad de porciones a uno y otro lado de la línea de base. La polifasia se asocia a UM con
distribución espacial irregular, tanto por crecimientos axonales reinervantes (neurógeno, amplitud
aumentada) como por pérdida parcial de fibras musculares (miopatías, amplitud disminuida).
En el músculo normal, el número de PUM polifásicos no deben sobrepasar el 10-15%. El
número de puntas, Turns o cambios en la dirección del potencial que no llegan a cruzar la línea
de base tienen el mismo significado que la polifasia y pueden ser cuantificados por métodos
automáticos relacionándolos con la amplitud media del trazado EMG.
La estabilidad de un PUM consiste en la constancia en su morfología en sus sucesivas
excitaciones. Disminuye en los casos en que existen trastornos en la propagación del impulso en
las arborizaciones terminales (fases iniciales de la reinervación, denervacion en curso) o en la
transmisión neuromuscular (Miastenia Gravis).
Puede ser observada fácilmente aplicando filtraje de bajas frecuencias en el registro con aguja
coaxial y mediante el uso de línea de disparo y retraso de señal. Sin embargo, su cuantificación
ha sido establecida mediante la aguja de monofibra y la medición sistematizada del jitter
(variabilidad en la interlatencia entre dos potenciales de sendas fibras de la misma UM activadas
voluntariamente) o a partir de microestimulación axonal con determinación de la variabilidad de
latencia entre la estimulación y la contracción de las fibras musculares (jitter por estimulación).
En los trastornos neurogénicos con pérdida axonal, la denervación seguida de reinervación
produce cambios en la morfología de los PUM que dependen del tiempo. Tras la fase activa de
denervación se produce crecimiento de colaterales con conducción inestable. Los PUM
reestructurados, tendrán mayor amplitud y duración al adoptar fibras musculares hasta entonces
pertenecientes a otras UM. Su inicial inestabilidad y polifasia, tenderán a disminuir con el
tiempo, hasta constituirse en PUM grandes y estables que corresponden a los procesos de
reinervación crónica.
31
4.8 Señal Electromiografica (EMG)
La señal electromiográfica es el potencial eléctrico generado por la suma de todos los
potenciales de las unidades motoras producto actividad muscular (contracción y relajación). En la
figura 4.7 puede observarse la formación de la señal EMG, partiendo del reclutamiento de un
grupo de unidades motoras. La señal EMG es una señal bioeléctrica que se detecta directamente
en la superficie de la piel a través del uso de electrodos de superficie.[14].
Figura 4.7. Formación de la señal EMG.[15]
4.8.1 Características de la señal EMG
Entre las características de una señal EMG (Ver Figura 4.8) se puede decir:
¢
Su principal característica radica en que es una señal muy ruidosa, debido a la dispersión de la
sumatoria de múltiples unidades motoras.
¢
La fuente eléctrica es el potencial de la membrana muscular, aproximadamente -70mV.
¢
Los métodos utilizados en la medición de los potenciales se encuentran en un rango que va
desde poco menos de 20-2000µV en cada unidad motora, y medidos en la superficie de la
piel no mayor de 5mV.
¢
La frecuencia de las señales EMG se encuentra en el rango de 20-200 Hz. [ 5]
32
Figura 4.8. Señal Electromiografica EMG vista es un osciloscopio
adquirida de la zona tibial anterior[16].
4.9 Tipos de Electrodos:
Existen cinco tipos de electromiografía, en función de los distintos tipos de electrodos:
4.9.1 Electromiografía convencional (electrodo concéntrico):
Consiste en el registro de la actividad bioeléctrica generada por músculo mediante el electrodo
concéntrico (EC) de Adrian y Bronk o con electrodo monopolar (EM). El EC tiene una superficie
de registro de forma helicoidal de 150 x 580 mm que equivale a 0,07 mm2; la del EM es de forma
cónica y mide 0,25 mm2; este tamaño es el adecuado para el estudio de los PUM. La EMG de
aguja está indicada cuando se sospecha la presencia de trastornos miógenos o neurógenos, sean
estos primarios o secundarios. Con esta técnica se explora en primer lugar el músculo en reposo
para detectar la presencia de actividad espontánea.
4.9.2 Electromiografía cuantitativa:
Se realiza midiendo manualmente los Potenciales de Unidad Motora sobre un registro gráfico
realizado en papel durante una contracción con esfuerzo ligero moderado.
33
4.9.3 Electromiografía de Fibra Simple (EMGFS):
Se trata de una técnica diseñada y desarrollada por Stalberg y Cols desde comienzos de los
años 60. Se utiliza una aguja especial con un área de registro muy pequeña (25 micras de
diámetro) que, empleando filtros (bajas: 500 Hz, altas: 10 kHz) que atenúan las bajas frecuencias,
permite registrar y estudiar la actividad aislada de una sola fibra muscular. Las dos indicaciones
fundamentales son la detección de cambios en la estructura de la unidad motora y el estudio de la
transmisión neuromuscular.
4.9.4 Macro EMG:
Lo característico de esta técnica es el electrodo “macro” que consiste en un electrodo con una
cánula desnuda en una longitud de 15 milímetros que le permite captar la actividad de
virtualmente todas las fibras de una unidad motora. El barrido es disparado mediante la técnica
del “trigger” por un electrodo de fibra simple instalado en el centro de la superficie de registro del
electrodo macro. La técnica precisa de 2 canales: Uno, que capta la actividad EMG mediante una
aguja de Fibra Simple y dispara el barrido del osciloscopio; otro, que promedia la señal capturada
por el electrodo macro. Los filtros del electrodo fibra simple se sitúan a 500 Hz y 10 kHz y los de
la macro a 8 Hz y 8 kHz.
4.9.5 EMG de superficie y estudio del espectro de frecuencias:
La primera es una técnica preferentemente utilizadas en los laboratorios de kinesiología para
valorar los patrones de marcha, para lo cual se procede a menudo al rectificado de la señal. Para
estos casos se utilizan electrodos superficiales que van unidos a la piel sobre el segmento
muscular a estudiar. Los electrodos de superficie suelen ser de ranura, con pasta o gel de
electrodo llenando la cavidad para conseguir más contacto con la piel y reducir así la impedancia
de los electrodos. Su diámetro va de 2 a 10 mm. en su parte activa (Figura 4.9).
34
Figura 4.9. Electrodos superficiales de ranura.
En ocasiones se emplean electrodos profundos de hilo metálico que son más estables. Estos
electrodos son muy selectivos y no se observan los cruces (registros de músculos activos
adyacentes) que pueden ocurrir con electrodos superficiales. Estos electrodos consisten en dos
cables de acero inoxidable aislado con teflón, fino y altamente maleable, de un diámetro de 25 a
50 micrómetros pasados por una aguja hipodérmica. Las puntas se descubren un milímetro y se
doblan unos milímetros sobre la cánula de la aguja, con una porción doblada de 1 milímetro más
larga que la otra para evitar el cortocircuito del circuito eléctrico. Cuando la aguja se clava en el
músculo y después se retira, los cables permanecen en su sitio porque las porciones dobladas
hacen las veces de gancho (Figura 4.10). [ 17].
Figura 4.10. Diagrama esquemático de los electrodos de aguja.[ 17].
35
4.10 Extracción de características y reconocimiento de patrones.
La extracción de características es un paso importante en el proceso de reconocimiento de
patrones. En el caso de las señales EMG, un patrón esta representado por una señal x(t) en el
dominio del tiempo, como la que se muestra en la Figura 4.11.
Figura 4.11. Señal EMG típica durante una contracción muscular.
Se pueden considerar generalmente dos métodos para la extracción de características:
aproximación paramétrica y no paramétrica. Dentro de la aproximación paramétrica se tienen
modelos tales como AR (por sus siglas en inglés: autoregresive model, modelo autoregresivo),
MA (moving average o promedio de movimiento) y ARMA, que es la union de estas dos últimas.
En la aproximación no paramétrica se consideran generalmente dos métodos: aproximación
temporal y aproximación espectral, aunque también pueden ser considerados métodos de
aproximación tiempo-frecuencia.
4.11 Aproximación Temporal.
El comportamiento de una señal en el dominio del tiempo puede entregar características
significativas que dan una idea del comportamiento frecuencial de la señal y de su intensidad.
¢
Valor Medio Absoluto
36
¢
Cruces por cero
¢
Cambio de pendiente
¢
Longitud de la onda
4.11.1 Valor Medio Absoluto
Un estimado del valor medio absoluto de la señal x en el segmento i de N muestras está dado
por:
xi =
1
N
N
∑x
k =1
k
Ecuación 4.1
4.11.2 Cruces por cero
Una idea de la frecuencia de una señal puede ser obtenida a partir del número de veces que la
señal pasa por cero. Un umbral ε debe ser definido para reducir los cruces por cero por
consecuencia del ruido. Dadas dos muestras consecutivas xk y xk+1 se incrementa el conteo de
cruces por cero si: xk > 0 y xk+1 < 0 ó xk < 0 y xk+1 > 0 y |xk − xk+1| ≥ ε
4.11.3 Cambio de pendiente
Otra característica que puede dar idea del contenido de frecuencia de una señal puede ser el
número de veces que cambia la pendiente de una señal. De nuevo, es recomendable seleccionar
un umbral para reducir los cambios de pendiente inducidos por el ruido. Dadas tres muestras
consecutivas xk−1, xk y xk+1, el cambio de pendiente es incrementado si: xk > xk−1 y xk > xk+1 ó xk
< xk−1 y xk > xk+1 y |xk − xk−1| ≥ ε ó |xk − xk+1| ≥ ε
37
4.11.4 Longitud de la onda
Una característica que provee información acerca de la complejidad de una señal en un
segmento, esta definida por la longitud de la onda. Esto es simplemente el acumulado de la
distancia entre dos muestras consecutivas definidas como:
N
lo = ∑ x k − x k − 1
Ecuación 4.2
k =1
Asumiendo que el tiempo entre muestras es muy pequeño. El valor resultante da una idea de la
amplitud, frecuencia y duración de la onda en un solo valor.
4.12 Modelo AR (Autoregresive Model o Modelo Autoregresivo)
El modelo AR se encuentra definido como:
P
x (n) = ∑ a i +1 x (n − i ) + e(n)
Ecuación 4.3
i =1
donde x(n) es la señal EMG, ai son los coeficientes, P denota el orden del modelo, y e(n) un
término de error. También puede ser definido como:
P
A( z ) = 1∑ ai +1 z − i
Ecuación 4.4
i =1
Donde A(z) tiene los coeficientes normalizados del modelo. Este modelo es igual al de un
filtro FIR, por lo que tanto los coeficientes de este modelo como los de un filtro FIR del mismo
orden son iguales.
4.13 Aproximación Espectral.
Las señales electromiográficas presentan un contenido espectral que puede dar una idea del
tipo de movimiento que se está realizando. Una forma tradicional para caracterizar una señal x es
a través de la función P(f) conocida como la densidad del espectro de potencia (PSD). Para la
obtención de las características de las señales EMG se pueden utilizar dos métodos:
38
¢
¢
Periodograma
Espectrograma
4.13.1 Periodograma
Una forma de estimar la densidad del espectro de potencia (PSD) de una señal es simplemente
encontrar la transformada discreta de Fourier (usualmente hecha con FFT) y tomar la magnitud al
cuadrado del resultado. Este estimado es llamado periodograma.
El periodograma estimado del PSD de una señal x de longitud N es:
2
X (k )
P(k ) =
, k = 1,..., N
N
Ecuación 4.5
donde X(k) son los coeficientes de la FFT y están definidos como:
N
X ( k ) = ∑ x[n]e
− j 2π ( k −1)
n −1
N
Ecuación 4.6
n =1
y donde la frecuencia fk para cada componente del PSD se puede hallar como:
fk =
k. f S
N
Ecuación 4.7
donde fs es la frecuencia de muestreo. A partir de este cálculo se extraen dos características:
¢
¢
Potencia promedio.
Potencia máxima.
4.13.2 Espectrograma
Debido a la estructura temporal que poseen las señales EMG, se calculó la transformada de
Fourier dependiente del tiempo para una señal, usando una ventana deslizante. Esta forma de
transformada de Fourier, también se conoce como STFT (Short Time Fourier Transform). La
STFT puede ser expresada usando una ventana más corta que la longitud total de la señal, y que
puede ser posicionada arbitrariamente a lo largo de la secuencia de tiempo, así: [ 20]
39
N −1
S ( f , t ) = ∑ x[n]ω[n − t ]e − j 2πft
Ecuación 4.8
n =0
donde x es la señal de longitud N, y w es la ventana. El espectrograma es la magnitud de esta
función. A partir de este cálculo se extraen dos características para cada ventana
¢
¢
Energía media.
Energía máxima.
4.14 Aproximación con Wavelet Packets
La transformada de Fourier de una señal f(t) está generalmente definida por:
F (ω ) = ∫
∞
−∞
f (t )e− jωt dt
Ecuación 4.9
Cuando f(t) es medida sobre un intervalo finito de tiempo T, y muestreada cada intervalo de
tiempo τ . La transformada de Fourier puede ser vista también como un banco de N filtros (donde
N=T/τ). Los filtros cubren la región de frecuencia [−π/τ, π/τ], cada uno con ancho de banda de
∆ω=2π/T. La distribución de energía de f(t) sobre el intervalo de frecuencia es |F(ω)|,
es la energía de f(t). Note que F(ω) no contiene ninguna información en el
tiempo.
La transformada Wavelet (TW) fue desarrollada para mantener tanto las propiedades
frecuenciales como las temporales de una señal. Este análisis es basado en un conjunto completo
de funciones (llamadas wavelets) que se pueden ubicar tanto en el dominio del tiempo como en el
de la frecuencia. La TW de f(t) está dada en función de dos parámetros a y b, donde a representa
la escala de frecuencia, y b indica la ubicación en el tiempo de la wavelet, así:
W (a, b) = ∫
∞
−∞
f (t )
1
ψ a ,b (t )dt
a
con
t −b
Ecuación 4.11
a
ψ a ,b (t ) = ψ
40
Ecuación 4.10
donde ψ(t) es llamada wavelet madre y ψa,b(t) es la wavelet escalada y trasladada. Note que
ψa,b(t) reemplaza el término
en la transformada de Fourier. Sin embargo, a diferencia de la
transformada de Fourier, existen numerosas wavelets madre, y ψ(t) puede ser escogida de
acuerdo al problema.
Para una señal f(t) medida sobre un intervalo finito de tiempo T, y muestreada cada intervalo
de tiempo τ, la TW puede ser vista también como un banco discreto de filtros.[ 21]
41
CAPÍTULO 5
INGENIERÍA CONCEPTUAL
5.1 Interfaces Disponibles
En este apartado se describirán algunos elementos disponibles en el laboratorio de la Unidad
de Gestión de Tecnologías en Salud (UGTS) orientados a la realización de experiencias entorno
al proyecto desarrollado.
Para experiencias de adquisición de señales de baja amplitud se ha utilizado un amplificador
diferencial: el modelo 1700 de A-M Systems (Ver Figura 5.1), este es un equipo robusto que se
conecta a la red de 120V y que permite establecer frecuencia de corte baja y alta, ganancia
deseada y activación de un filtro Notch (Rechaza banda a 60 Hz).
Figura 5.1 Amplificador Diferencial de AM Systems
Para visualizar las señales obtenidas en tiempo real se ha utilizado un Osciloscopio Digital
(Ver Figura 5.2) con alta sensibilidad y ganancia de hasta 100X, Marca Tektronix modelo TDS
210.
Figura 5.2 Osciloscopio Digital
5.2 Nuevos Equipos
Un equipo nuevo en la UGTS especial para medir biopotenciales es la unidad Sierra Wave
(SW) de laboratorios CADWELL. En la fase inicial del trabajo en la empresa se invirtió un
tiempo importante en lo que se refiere al uso del Sierra Wave orientado a la Electromiografía es
por esto que se dedicarán los apartados subsiguientes de este capítulo a este equipo dado que su
manejo juega especial protagonismo en la convalidación del diseño que se desea proponer.
5.2.1 Componentes Principales
El equipo electromiógrafo consta básicamente de:
¢
Unidad base Sierra Wave (Ver Figura 5.3)
¢
Amplificador de dos canales (Ver Figura 5.3)
¢
Software (programa) Sierra Wave para visualizar los biopotenciales (es necesario un
computador).
43
Figura 5.3 Base SW, Amplificador SW e ícono de acceso directo al Programa.
En la Figura 5.4 puede observarse los elementos nombrados anteriormente incluyendo el software
funcionando en un computador portátil.
Figura 5.4 Conjunto de elementos del Sierra Wave [ 18]
44
5.2.1.1 Tareas Destacadas
Con el Sierra Wave se pueden hacer reportes a partir de:
¢
EMG/NCV/EP
¢
Onda F
¢
Reflejo H
¢
Estudio de nervios y músculos
¢
Potenciales evocados auditivos, visuales y somatosensitivos
¢
Electrococleograma
¢
ERG Electroretinograma
¢
ERG Respuesta de conos
¢
ERG Respuesta de bastones
¢
Patrón Interferencial
5.2.1.2 Características
El Sierra Wave posee múltiples características, en este apartado se han extraído aquellas que
se han ajustado a las necesidades del proyecto desarrollado, para otras características y
especificaciones ver APÉNDICE C, al final de este informe.
¢
Marcas de tiempo y amplitud disponibles en todas las pruebas, incluyendo Potenciales
Evocados.
¢
Posee una ventana de Controles del Amplificador que reemplaza a las barras de herramientas.
¢
No es necesario ingresar la información del paciente antes de iniciar el estudio, puede
ingresarse en cualquier momento durante el transcurso del estudio o aún cuando el examen se
cerró.
45
¢
Compatibilidad con múltiples usuarios usando el nombre de usuario de Windows XP. Cada
usuario puede tener su propia configuración y Directorios de Datos.
¢
El generador de informes “QuickReport” utiliza Microsoft Word.
¢
Los informes se guardan como documentos de Word.
¢
Las plantillas de informes se pueden editar y salvar durante la generación de un reporte.
¢
Se pueden almacenar los últimos 30 segundos de EMG en Vivo y audio.
¢
Se pueden almacenar trazos en Captura EMG (de 10 hasta 50)
¢
Las puntas del estimulador eléctrico pueden doblarse desde +90 a -45 grados. La punta del
Ánodo (+) se puede mover a otra posición más cercana al Cátodo (-).
¢
Uso del menú desplegable del botón derecho del ratón para un acceso rápido a funciones
como división de pantalla, marcas, smoothing, limpiar pantalla, borrar trazados y autocursores. Estás funciones también están disponibles utilizando las teclas de función y perillas.
¢
Análisis de Unidad Motora Simple
¢
Valores anormales señalados en rojo o con negrita.
¢
Característica de PrtScreen (Imprimir Pantalla) incorporada
¢
En EMG, el estimulador eléctrico puede usarse para iniciar/detener el EMG, almacenar una
instantánea y anotar un músculo. La perilla de intensidad puede usarse para cambiar la
ganancia de EMG en Vivo y para adelantar o atrasar el trazado en el modo de revisión de
EMG.
¢
Configuración de todos los protocolos en una sola pantalla.[ 19].
5.2.2 Principios Básicos para trabajar con Señales EMG en el Sierra Wave
Luego de que se instala el software en el computador y configurado la tarjeta de red del mismo
con la Dirección IP del equipo especificada en el Manual de instrucciones, se ubican los
46
electrodos sobre el sujeto y se procede a abrir el programa. Se despliega una ventana en la que se
llenan los datos del paciente, Ver Figura 5.5, (esto se puede hacer al comienzo o al final del
estudio), luego
Figura 5.5 Ventana de Recolección de datos del paciente
se especifica el tipo de estudio a realizar: EMG, y se despliega otra ventana en la que se indica el
músculo bajo estudio, Ver Figura 5.6.
47
Figura 5.6 Elección del Músculo bajo estudio
Se puede visualizar el programa ejecutándose y sólo falta ajustar las características del
amplificador según lo deseado, Ver Figura 5.7. Los parámetros que aquí se presentan son
modificables de acuerdo a una serie de valores predeterminados en el programa, destacan:
¢
Ganancia o Gain (horizontal, cuántos µV por división),
¢
Frecuencia de corte Baja o Locut,
¢
Frecuencia de corte Alta o Hicut,
¢
Activación o desactivación de un filtro Notch,
¢
Barrido o Sweep (vertical, Cuántos mseg. por división)
48
Figura 5.7 Ajuste del Amplificador del SW
5.2.3 Manipulando la información que provee el SW
Todos los parámetros pueden modificarse simultáneos a la captura, permitiendo así ver la
señal EMG desde distintas perspectivas así como también utilizar marcadores para visualizar las
unidades de un punto de interés. La captura puede ser en vivo, puede congelarse y también se
puede variar el tipo de análisis realizado, por ejemplo pasar de análisis de Multi-Motor Unit
Analysis (Análisis de Múltiples unidades motoras) a Single Motor Unit Analysis (Análisis de
Unidad Motora Individual) El estudio puede guardarse en archivos con diferente extensión
incluyendo .wav y .avi (la señal puede guardarse como un archivo de audio o como un archivo de
video reproducibles en otros programas que soporten estas extensiones, ver Figura 5.8).
Utilizando la opción de Save Traces To ASCII (Guardar trazos a ASCII) podemos ver un archivo
con extensión .txt que contiene valores numéricos que corresponden a cada punto muestreado
durante el estudio y puede abrirse en otros programas como Microsoft Excel, ver Figura 5.8,
Notepad o al seleccionar los valores de interés exportarlos como un arreglo de valores para
análisis posteriores.
49
Figura 5.8 Importando desde el SW a otros programas. Izquierda: Archivo ASCII generado por el
programa SW abierto en Microsoft Excel. Derecha: Ploteo de los puntos leídos del archivo .wav
en Matlab.
50
CAPÍTULO 6
INGENIERÍA BÁSICA
Para diseñar la interfaz electromiográfica se empleó un diagrama de bloques (Ver Figura 6.1)
general que se fue desglosando para alcanzar el detalle del diseño y con ello el fin del proyecto.
BLOQUE I
BLOQUE II
BLOQUE III
Figura 6.1 Diagrama de Bloques
BLOQUE IV
6.1 Bloque I: Adquisición
6.1.1 Selección del grupo muscular
Las mediciones se realizarán en el bíceps, que junto con el tríceps son los músculos de mayor
representación en los movimientos de extensión y flexión del brazo respectivamente[22],
permitiendo así una fase de prueba más cómoda por la fácil identificación gráfica y por el ahorro
de tiempo que representa para el paciente a prueba hacer sólo contracción y relajación del
músculo (movimiento central de estudio en este trabajo).
6.1.2 Criterios de adquisición
Para la adquisición de las señales EMG se debe seleccionar los sensores adecuados de acuerdo
a la medición a realizar pues esto está altamente relacionado con la señal observada. Para este
caso los electrodos a utilizar serán de superficie de acuerdo con las recomendaciones de
Electromiografía de superficie para la evaluación no invasiva de los músculos o SENIAM (por
sus siglas en inglés Surface EMG for the Non-Invasive Assessment of Muscles)
SENIAM es un consenso multinacional que aborda los aspectos más importantes relacionados
con la adquisición y el análisis de señales EMG de superficie.
6.1.2.1 Ubicación de los electrodos
La ubicación de los electrodos puede ser longitudinal o transversal y debe ser consistente en
sesiones consecutivas de estudio y sobre diferentes pacientes. El objetivo al ubicar los electrodos
es conseguir un sitio estable para obtener una buena señal electromiográfica. Para el desarrollo de
este proyecto se utilizarán electrodos superficiales, de acuerdo con las recomendaciones de la
SENIAM.
¢
Longitudinal: la recomendación SENIAM es ubicar el electrodo bipolar en la zona media
del músculo, esto es, entre la terminación de la neurona motora que envía el impulso
eléctrico al músculo (aproximadamente línea media del músculo) y el tendón distal.
52
¢
Transversal: la recomendación SENIAM es ubicar el electrodo bipolar sobre la zona media
del músculo, de tal forma que la línea que une los electrodos, sea paralela con el eje
longitudinal del músculo.
La normatividad SENIAM define la distancia entre electrodos como “la distancia entre centros
de las áreas de conductividad de los electrodos.
Con respecto a la distancia entre electrodos, la normatividad SENIAM recomienda que:
¢
Los electrodos bipolares EMG de superficie tengan una distancia entre electrodos de entre
20mm y 30mm.
¢
Cuando los electrodos bipolares están siendo aplicados sobre músculos relativamente
pequeños, la distancia entre electrodos no debe superar 1/4 de la longitud de la fibra
muscular. De esta forma se evitan los efectos debidos a tendones y terminaciones de las
fibras musculares. [23]
6.1.3 Acondicionamiento de EMG’s recibidas por los electrodos
Para llevar la información recibida por los electrodos al amplificador se necesitará un cable
par trenzado que es óptimo para eliminar el ruido inductivo puesto que crea un efecto de
cancelación de señales inducidas (Ver Figura 6.2).[ 5].
53
Figura 6.2. Cable trenzado para evitar el ruido inductivo.[ 5]
Finalmente se colocan tres electrodos en el paciente (Figura 6.3). El área de interés deberá estar
libre de grasa o cualquier tipo de sucio. Dos de ellos, recibirán las señales que serán la entrada de
un amplificador diferencial y el tercero será utilizado como referencia virtual, que además de
cumplir la función de indicador de voltaje de referencia o tierra analógica, el mismo por medio
del conector establece contacto con el chasis del amplificador, lo que evita los efectos
triboeléctricos o electrostáticos.
Figura 6.3 Visualización de los electrodos en el Bíceps
54
6.2 Bloque II: Amplificación
Las EMG se encuentran en rangos de voltaje variables pero no mayores a 5mV por lo que para
poder trabajar con ellas es indispensable seleccionar un amplificador con una ganancia aceptable
para los equipos disponibles de medición.
6.2.1 Requerimientos
Para la selección del amplificador de instrumentación es necesario tomar las siguientes
consideraciones:
¢
Las EMG no pueden ser cuantificadas directamente: al medirlas usando los electrodos, la
actividad de múltiples fibras musculares puede ser modelada como un proceso estocástico
variante en el tiempo con media cero. Ha sido observado que la desviación estándar de la
señal EMG (sin procesar) está monotónicamente relacionada al número de unidades motoras
activadas y a la velocidad de su activación. Esta desviación estándar es usada para aproximar
la magnitud de la actividad eléctrica muscular, referida como la amplitud EMG.[24]
¢
De acuerdo a la unidad en la que viene dada la amplitud de la EMG el amplificador debe
tener una ganancia de al menos 1000.
¢
Existen inconvenientes tales como el cross-talk, definido como la interferencia debida a la
actividad eléctrica de músculos alrededor.
¢
La impedancia de entrada del amplificador puede ser por lo menos el doble de la magnitud de
la impedancia esperada en el electrodo.
¢
¢
El amplificador debe tener alta razón de rechazo en modo común (CMRR).
El amplificador debe caracterizarse por bajo ruido (Vrms/√Hz)
55
Es necesario que el amplificador sea diferencial, porque además de ser versátil, por ejemplo,
puede conectarse como inversor o no-inversor, es ideal para eliminar los potenciales resultantes
de ruido añadido (Vr), dado que la señal de salida es la amplificación de la diferencia de las
señales de entrada (V1 y V2), es decir, Vo=G[(V1+Vr1)-(V2-Vr2)], con Vr1 = Vr2, obtenemos
exactamente la diferencia amplificada.
Figura 6.4 Principio de un Amplificador diferencial
6.2.2 Propuestas para el amplificador
Una vez que se ha definido que el amplificador a utilizar debe ser diferencial, pueden ser
propuestas distintas implementaciones dentro de este marco:
6.2.2.1 Propuesta N°1: Amplificador de instrumentación de 3 Operacionales con seguidores
de voltaje
56
Figura 6.5 Amplificador de instrumentación con seguidores de Voltaje
Los amplificadores operacionales (AO) AO1 y AO2 están conectados como seguidores de
ganancia=1, el AO3 es quien determina el voltaje de salida (Vo).
Obviando AO1 yAO2 (lado derecho de la línea punteada), Vo queda como
VO = −
R2
R + R2 R4
V1 + 1
V2
R1
R1 R3 + R4
Ecuación 6.1
para ser del tipo diferencial (Vo=G[V1-V2]), debemos elegir R1=R3 y R2=R4 quedando:
R
VO = − 2 (V1 − V2 )
Ecuación 6.2
R1
Las resistencias poseen una tolerancia, entonces sus valores nominales no son exactamente los
teóricos, por lo que es parcialmente diferencial.
La Razón de Rechazo en Modo Común o CMRR, Por sus siglas en inglés: Common Mode
Rejection Ratio, de este amplificador es:
CMRR =
GD
=
GCM
−
R2
R1
R
1+ 2
R
R1
− 2+
R1 1 + R3
R4
57
Ecuación 6.3
Manteniendo la elección de R1=R3 y R2=R4, el CMRR es infinito, pero una vez más debemos
considerar la no idealidad de las resistencias y al mismo tiempo perseguir un alto valor de CMRR
(mayor de 120db) que no puede obtenerse con esta configuración. Considerando todo el montaje
(los 3 AO), mejora el problema de tener resistencia de entrada baja pero sigue teniendo una
aplicación bastante limitada pues persisten problemas de CMRR bajo y ganancia no modificable,
pues para esto último se necesita hacer la dificilísima y poco práctica tarea de modificar las
resistencias por pares.
6.2.2.2 Propuesta N°2: Amplificador diferencial de 3 Operacionales (3 etapas)
Figura 6.6 Amplificador diferencial de 3 AO’s.
A la derecha de la línea punteada encontramos la misma configuración descrita en el apartado
anterior pero a la izquierda se añade una configuración diferente, muy típica en instrumentación y
que mejora en distintos aspectos la configuración anterior. Para esta configuración la salida queda
como:
R3
R
R2
VO = − 3 Va +
V
R '2 b
R2
1+
R '3
1+
Ecuación 6.4
En donde Va y Vb:
R
R
Va = V1 1 + 1 − V2 1
RG
RG
58
Ecuación 6.5
R
R
Va = V1 1 + 1 − V2 1
RG
RG
Ecuación 6.6
Para garantizar la condición de diferencial, hacemos R2= R’2 y R3= R’3 y
R
R
R'
VO = − 3 1 + 1 + 1 (V1 − V2 )
Ecuación 6.7
R2 RG RG
Se puede utilizar R1= R’1 y esto no afecta el carácter diferencial quedando finalmente:
R
R
VO = − 3 1 + 2 1 (V1 − V2 )
Ecuación 6.8
R2
RG
Para el cálculo del CMRR, debemos considerar la ganancia diferencial del amplificador de una
etapa AO3 (Gd2) y la ganancia diferencial del resto del circuito (Gd1):
CMRR =
Gd
G .G
= d 1 d 2 = Gd 1.CMRR2
GCM
GCM 2
Ecuación 6.9
Para obtener una diferencia importante respecto a la configuración anterior, debemos hacer
Gd1 mayor que la unidad. Esto podemos lograrlo variando Gd1 a través de la variación de RG, que
se encuentra sola y por tanto resulta fácil su ajuste, obteniendo un CMRR deseable, además con
esta configuración se logra una ganancia ajustable, resistencia infinita y un efecto positivo sobre
errores debidos al Offset. Para ver el efecto del offset suponemos dos fuentes (VIO1 y VIO2) antes
de cada etapa, conviene que Gd1 sea mayor que Gd2 para obtener el menor error (Ver Figura
6.7).[25].
Figura 6.7 Efecto del Offset en la entrada de cada etapa [25].
6.2.2.3 Propuesta N° 3: Amplificador de instrumentación integrado
Para
instrumentación
médica
son
ampliamente
utilizados
los
amplificadores
de
instrumentación, ya que abarcan las consideraciones requeridas, utilizando el principio de la
configuración anterior. Así, son amplificadores diferenciales optimizados principalmente porque
la precisión de las resistencias es mucho mejor, tienen un CMRR alto, muchos de ellos con
59
ganancia variable por un juego sencillo de resistencias externas, alta impedancia de entrada y
bajo ruido.
6.2.3 Propuesta final
Una vez analizadas las configuraciones propuestas se puede concluir que la que se adapta
mejor a las condiciones requeridas y representa un ahorro en costos de espacio, tiempo, dinero y
ajustes circuitales es la propuesta N°3, por ende sobre esta configuración se basará la selección de
componentes a utilizar en la etapa de Amplificación.
6.3 Bloque III: Filtrado
Debido a que las señales mioeléctricas son de bajísima amplitud, ruidos e interferencias, como
el ruido de línea (60Hz para Venezuela) o el ocasionado por la respiración en diversas
mediciones, pueden provocar una falsa interpretación de resultados. Por lo tanto es indispensable
considerar la aplicación de filtros que discriminen frecuencias o bandas de frecuencias que
pudieran influenciar significativamente la actividad electromiográfica.
6.3.1 Ruidos e interferencias
Antes de elegir cualquier topología existente para la función de filtrado se debe definir la
banda de frecuencias en la que se evidencian las EMG y de acuerdo a esto listar otras fuentes
cuya frecuencia de trabajo se encuentre en el mismo rango definido para determinar si pueden ser
discriminadas o ignoradas.
Para el desarrollo de este trabajo y siguiendo la investigación previa a éste realizada por el Ing.
Omar Leonardo Tolosa, el rango frecuencial para las EMG es de 20-500Hz en este mismo marco
se encuentra:
¢
Movimiento en la interfaz electrodo-piel
60
¢
¢
¢
Ruido inherente en equipos electrónicos (0 a miles de Hz).
Ruido de la red eléctrica (60 Hz).
Respiración y señales ECG
6.3.2 Propuestas de filtrado
Debido a que el rango de trabajo es finito, el filtro debe ser pasabanda (PB). El movimiento en
la interfaz electrodo-piel no debe ser considerado en esta etapa puesto que ya fue abordado en el
Bloque II.
Para la topología PB se pueden hacer muchísimas proposiciones y combinaciones entre ellas.
Tomando en cuenta que el eje del trabajo contempla circuitería básica y de bajo costo se
describen brevemente las siguientes propuestas.
6.3.2.1 Propuesta N° 1: Pasa banda (Pasa alto+Pasa bajo). Primer Orden.
Figura 6.8 Redes STC de tipo pasa alto y pasa bajo
Con este sencillo par de redes de una sola constante de tiempo (STC) puede conseguirse un
filtro pasa alto y pasa bajo para construir el filtro pasabanda deseado. La frecuencia de corte (fo)
puede calcularse según la siguiente formula:
fo =
1
2πRC
Ecuación 6.10
Se utilizó la función Bode, predeterminada en el software (programa) Matlab para graficar la
respuesta en frecuencia de expresiones introducidas por el usuario y así simular la respuesta en
61
frecuencia de un circuito pasa alto (Ver Figura 6.9), el problema con esta configuración es que se
obtiene la falda de filtro con menor pendiente (20dB/década), esto no es deseable puesto que
suprimirá información valiosa a pesar de cortar el eje de frecuencia en fo teórica.
Figura 6.9 Filtro Pasa Alto de 1er orden. Con fc=100 rad/seg.
Se observa la pendiente de 20 dB/dec y el comportamiento asintótico y real (3dB) del filtro.
6.3.2.2. Propuesta N° 2: Pasa banda basado en
PAEP + Filtro Notch
De igual forma usando Amplificadores Operacionales se puede construir un filtro pasa alto y
pasa bajo de mayor orden y con más ventajas que el descrito en el apartado anterior, por ejemplo
el filtro puede ser más selectivo (mayor pendiente). Primero se trabajará con el filtro pasa alto de
la Figura 6.10.
62
Figura 6.10 Filtro Pasa alto
Cuya Función de transferencia (Vo/Vin) se deduce de la expresión:
Vo
sC
(1 + R1 sC ) 2sCR1 + 1 Vo VosC
− −
= Vin
2
R
sC
R
1
1
R1 2
f
g
Ecuación 6.11
h
La ganancia a altas frecuencias se puede calcular de acuerdo a la siguiente ecuación:
G=
R1 + R2
R2
Ecuación 6.12
Esta configuración se montará de acuerdo a los parámetros descritos en la Tabla 6.1
Tabla 6.1 Parámetros guía para el diseño del filtro
Ba s e
Pasa alto
Pasa bajo
OpAmp
Ancho de
Orden
Ganancia
20Hz –
2
2
500Hz
2
2
banda
Utilizando el valor del factor de polo para máxima respuesta plana (Q=0.707) [9] y
sustituyendo valores para el condensador y la resistencia, con R1=R2 (ganancia=2=6dB),
podemos escribir en el Command Windows (Ventana de Comandos) de Matlab:
63
Utilizando el comando Bode(TF), vemos el comportamiento del filtro en Figura 6.11:
Bode Diagram
8
7
System: pa
Frequency (Hz): 128
Magnitude (dB): 6.02
6
5
Magnitude (dB)
4
3
2
1
System: pa
Frequency (Hz): 15.3
Magnitude (dB): 0.00968
0
-1
-2
50
100
150
200
250
Frequency (Hz)
Figura 6.11 Diagrama de Bode de Filtro Pasa Alto de 2do. Orden
Los cálculos para el filtro pasa bajo (Ver Figura 6.12) son análogos a los del filtro pasa alto y
tomando las mismas consideraciones del filtro pasa alto anterior (R1=R2 y Q=0.707) se obtiene :
64
Bode Diagram
8
7
System: pb
Frequency (Hz): 45.5
Magnitude (dB): 6.02
6
5
Magnitude (dB)
4
3
2
1
System: pb
Frequency (Hz): 654
Magnitude (dB): 0.0222
0
-1
-2
2
10
Frequency (Hz)
Figura 6.12 Diagrama de Bode de un Filtro Pasa Bajo de 2do. Orden
De aquí respecto a la 1era. Propuesta mejoramos el aspecto de la pendiente del filtro y
podemos manipular la ganancia del filtro a conveniencia.
Además se agregará a este montaje un filtro Notch, que es un caso especial de rechaza banda,
para eliminar la banda de 60Hz.
65
Bode Diagram
50
System: notch
Frequency (Hz): 2.5
Magnitude (dB): 6.01
0
System: notch
Frequency (Hz): 40.8
Magnitude (dB): -0.281
System: notch
Frequency (Hz): 89.3
Magnitude (dB): -0.0798
Magnitude (dB)
-50
-100
-150
-200
-250
-300
0
10
1
10
2
3
10
4
10
10
Frequency (Hz)
Figura 6.13 Filtro Notch @ 60hz
6.3.2.3 Propuesta N° 3: Pasa banda basado en Circuitos Integrados (CI)
El montaje se basará en la construcción de un pasabanda basado en circuitos integrados (CI)
que albergan más de un amplificador operacional. Teóricamente estos CI responden al análisis
realizado en el apartado anterior para las funciones de transferencia de un filtro pasa alto y pasa
bajo.
Por el diseño compacto del componente se podrá incrementar el orden del filtro, sin dificultad
alguna, para hacerlo más selectivo. La Figura 6.14 muestra el comportamiento del filtro simulado
en Matlab, cuyos parámetros se muestran en la Tabla 6.2.
Tabla 6.2 Parámetros guía para el diseño del filtro G=10V/V
Ba s e
Pasa alto
Circuito
Ancho de
banda
100Hz –
66
Orden
Ganancia
2
3.1
Pasa bajo
integrado
500Hz
2
3.1
Bode Diagram
Pasabanda 4to. Orden Vs. 2do. Orden
12
untitled1
untitled2
10
Magnitude (abs)
8
6
4
X: 42.43
Y: 2
X: 92.77
Y: 1.896
X: 970.1
Y: 1.896
X: 2121
Y: 2
2
0
1
10
2
10
Frequency (Hz)
10
3
4
10
Figura 6.14 Filtro Pasa banda. 4to. Orden Vs. 2do. Orden
El rango frecuencial de trabajo forma parte de la selectividad en la que está enmarcada esta
propuesta. Este rango si bien descarta información EMG contenida en bandas de frecuencia
menores que 100Hz, no discrimina el efecto observado en el espectro EMG cada vez que se hace
un esfuerzo.
6.3.3 Propuesta final
Los detalles del diseño para el bloque de Filtrado se harán de acuerdo a la propuesta N°3
puesto que es el filtro más selectivo teoricamente. Además colocando la frecuencia de corte baja
en 100Hz se ahorra espacio y circuitería, que a su vez se traduce en disminución de costos, al
suprimir la topología notch, cuyo montaje tiende a ser tedioso ya que la exactitud de la banda a
rechazar depende de la precisión con la que se ajusten resistencias externas variables (en circuitos
67
de costo similar a los contemplados en este trabajo). A pesar de que la banda de 60Hz se
encuentra en medio del espectro de una EMG, la información arrojada por el esfuerzo muscular
no se pierde en el rango frecuencial elegido, la validación determinante de este rango se realizará
de forma experimental partiendo de la bibliografía consultada y de otros experimentos que
corroboran el uso de estas frecuencias para trabajar con señales EMG.
6.3 Bloque IV: Procesamiento
Es necesaria, para los fines de este trabajo, la introducción de un microcontrolador en el que a
través de un algoritmo sencillo se pueda obtener información y crear nuevas señales a partir de la
EMG conseguida analógicamente.
El microcontrolador a utilizar debe satisfacer dos condiciones: 1) que posea en su arquitectura
un conversor analógico digital (por sus siglas en inglés, ADC) y 2) que permita un muestreo de
por lo menos 1000 muestras por segundo (recordar el teorema de Nyquist que exije que para que
una señal pueda ser muestreada, la frecuencia de muestreo debe ser al menos dos veces la
frecuencia de su armónico más alto).
El chip disponible es de la familia PIC. El PIC16F877 de Microchip pertenece a una gran
familia de microcontroladores de 8 bits (bus de datos) que tienen las siguientes características
generales que los distinguen de otras familias:
¢
¢
¢
Arquitectura Harvard
Tecnología RISC
Tecnología CMOS
Estas características se conjugan para lograr un dispositivo altamente eficiente en el uso de la
memoria de datos y programa y por lo tanto en la velocidad de ejecución. Además puede
programarse en varios lenguajes. Se utilizará por su sencillez, PicBasic puesto que tanto el
68
lenguaje como sus compiladores son poco exigentes y engorrosos permitiendo al programador
hacer un programa y sus correcciones de forma rápida.
69
CAPÍTULO 7
INGENIERÍA DE DETALLE
En este capítulo, y siguiendo la estructura del diagrama de bloques de la Figura 4.9 se
describirán los detalles de las decisiones tomadas en el Capítulo anterior para completar el diseño
del dispositivo final.
7.1 Bloque I: Adquisición
7.1.1 Selección de electrodos
Los electrodos de superficie disponibles en la Unidad de Gestión de Tecnologías en Salud
(UGTS) son modelo 4040M marca Unilect™ . Los productos Unilect™ son probados de
acuerdo al estándar ANSI/AAMI EC 12:2000 y son diseñados especialmente para el contacto
con la piel y así ser cómodos y agradables en el paciente, no se utiliza látex ni Policloruro de
Vinilo (PVC) en su fabricación.
Figura 7.1 Electrodos de Superficie Utilizados
7.1.1.1 Características principales
Están cubiertos con un gel que facilita la obtención de señales de alta calidad y minimiza el
riesgo de irritación en la piel después de incluso pasado varios días de uso. Además las
propiedades del adhesivo ajustan los electrodos para que no se desprendan y asegurar así señales
estables. Otras características pueden observarse en la Tabla 7.1, Tabla 7.2 y Tabla 7.3
Tabla 7.1 Dimensiones en el electrodo 4040M[26]
Tamaño
Electrodo
Dimensiones
Área adhesiva
Altura del
conector
mm
60
2540 mm2
0.5
Tabla 7.2 Materiales en el electrodo 4040M[26]
Parte
Soporte
Adhesivo
Materiales
Material
Tejido
Acrílico
Conector
Níquel o plata
Esponja
Polyurethane
foam (PU)
Sensor
71
Plata, Cloruro de
plata (AgCl)
Tabla 7.3 Características eléctricas en el electrodo 4040M[26]
Parámetro
Valor
Típico
Impedancia AC
200Ω
Características Eléctricas
Voltaje de Offset
0.5mV
-in vitro ANSI/AAMI--
Inestabilidad de Offset y ruido
interno
Recuperación por sobrecarga
de defibrilación
0 mV
11mv
7.2 Bloque II: Amplificación
7.2.1 Selección del Amplificador
El AD620 de Analog Devices (Dispositivos Analógicos), es un amplificador que cumple con
todos los requisitos y está especialmente construido para propósitos de precisión en adquisición
de data, aplicaciones médicas como electrocardiograma (ECG) y monitoreo no invasivo de
presión sanguínea, es de bajo costo, fácil obtención y acceso en el mercado.
7.2.2 Características principales del Amplificador
¢
¢
¢
Fácil de usar (Ver Figura 7.2)
Pequeño encapsulado que ahorra espacio y reduce costos en el montaje
Impedancia de entrada de 10GΩ (supera la condición de doblar la impedancia esperada en
los electrodos -ver página 55-)
¢
¢
La ganancia se ajusta mediante una resistencia externa (RG) de 1 a 1000.
Acepta voltajes de alimentación en este rango: + 2,3 v – +18v
72
¢
Necesita máximo 1,3mA, haciéndolo ideal para aplicaciones portables y/o alimentadas
por baterías.
¢
¢
¢
Bajo voltaje de offset: máximo 50µV
Bajo ruido de entrada: 9 nV/√Hz @ 1kHz
0,28 µV pico-pico en la banda de frecuencias: 0.1Hz-10 Hz.[27]
7.2.3 Diseño del montaje para el bloque de Amplificación
El montaje es sencillo, como ya hemos dicho que se necesita una ganancia que permita
visualizar y trabajar con más facilidad la señal de entrada, ajustaremos RG para obtener la
máxima ganancia (G) del amplificador, G=1000, que corresponde (de acuerdo a la hoja del
fabricante) a un CMRR=130 dB. Recordando que el AD620 está basado en el modelo típico de 3
Amplificadores Operacionales, RG puede calcularse así:
RG =
49 . 4 k Ω
G −1
Ecuación 7.1
De acuerdo a las recomendaciones de la Hoja de Datos del amplificador se realizó la
simulación del montaje en el software ISIS Proteus , (Ver Figura 7.2 para el montaje y 7.5 para el
resultado de la simulación). En la Tabla 7.4 se observa el valor de RG obtenido teóricamente y el
valor de G de acuerdo al valor de RG comercial disponible.
73
Figura 7.2 Circuito de prueba para el AD620
1v
1mv
Figura 7.3 Resultado de la Simulación con RG=49.45
Tabla 7.4 Valores del par RG - G
RG (Ω)
G (v/v)
Teórico
49.45
1000
Comercial
50
989
7.3 Bloque III: Filtrado
7.3.1 Selección del CI
Existe gran variedad de integrados que pueden adaptarse a los requerimientos planteados, y
guardan gran similitud entre ellos. Los integrados TL084 y LM324 son de uso común y de fácil
adquisición, después de un protocolo de prueba (Ver Figura 7.4) el TL084 fue seleccionado por
tener la respuesta más rápida o el mejor Slew Rate.
74
Figura 7.4 Respuesta a un Pulso Cuadrado de 1V. de Tl084 Vs. LM 324. En la parte superior se
observan superpuestas la repuesta del Tl084 (azul) y la del LM324 (verde).
El circuito integrado TL084 es muy común en aplicaciones medias de electrónica y ofrece dos
ventajas prácticas principales: 1) posee 4 Amplificadores Operacionales 2) Se alimenta con poco
voltaje, haciéndolo ideal para montajes portables y de bajo consumo.
7.3.2 Características principales del CI
Además de las ventajas referenciadas en el apartado anterior y su fácil conexión (ver Figura
7.6), otras características determinantes para el montaje se pueden ver en la
Tabla 7.5
75
Tabla 7.5 Datos del TL084 [28]
Parámetro
Características Eléctricas
-Amplificador
Operacional de Propósito
General --
Voltaje de Alimentación
Voltaje de Entrada
Entrada de Voltaje Diferencial
Potencia Disipada
Voltaje de Offset
Corriente de Offset
CMR
Slew Rate
Resistencia de Entrada
Valor
Máximo
+ 18
+15
+30
680
3
0.1
86
16
1000
Unidad
V
V
V
mW
mv
nA
dB
V/us
GΩ
7.3.3 Diseño del montaje para el bloque de Filtrado.
Los componentes se eligieron para tener la máxima respuesta plana del filtro, el montaje a
realizar debe corresponder al diseño teórico de la Figura 7.5
Figura 7.5 Pasabanda de 4to. Orden . (Fcinf= 100Hz Fcsup=500Hz)
En la Figura 7.6 se observa la respuesta del filtro al colocar en el simulador de circuitos
AIMSpice los valores de resistencia comerciales disponibles considerando el error asociado a
ellas mismas
76
Magnitud
24.2
db('v(30)')
'v(30)'
13.6
2.9
-7.7 1
10
10 2
10 3
10 4
frequency [Hz]
Figura 7.6 Respuesta del Filtro con R y C comercial. Se observa la respuesta del filtro utilizando
el eje de ordenadas en decibeles (rojo) y la respuesta del filtro utilizando el eje de ordenadas
lineal (verde).
7.4 Bloque IV: Rectificación
De acuerdo a la característica unipolar que tienen la mayoría de los puertos de entrada de los
microprocesadores, antes de poder pasar la señal filtrada al mismo es necesario rectificarla. Un
rectificador de onda completa poco sofisticado pero fiable es un puente de diodos cuya caída de
voltaje sea igual en todos los diodos; idealmente la caída es de 1,4V por lo que debemos agregar
una subetapa de amplificación (identificado como Bloque IV.i en el resto del escrito) para
asegurar que la señal no se caiga al pasar por el puente de diodos. Encapsulados de la familia
RS2XXL responden al requerimiento y consisten en un bloque pequeño de Silicon ideal para
circuitos impresos con 4 pines (2 para la entrada a rectificar-alterna- y 2 de salida para la carga).
7.5 Bloque V: Procesamiento
7.5.1. Características principales del PIC
¢
CPU RISC o Reduced Instruction Set Computer ( Juego reducido de instrucciones para el
computador).
¢
Máximo 35 instrucciones que aprender para su programación
77
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
¢
Todas las instrucciones se ejecutan en un ciclo de reloj, excepto los saltos que requieren dos
Frecuencia de operación de 0 a 20 MHz (DC a 200 nseg de ciclo de instrucción)
Hasta 8k x 14 bits de memoria Flash de programa
Hasta 368 bytes de memoria de datos (RAM)
Hasta 256 bytes de memoria de datos EEPROM
Hasta 4 fuentes de interrupción
Stack de hardware de 8 niveles
Reset de encendido (POR)
Timer de encendido (PWRT)
Timer de arranque del oscilador (OST)
Sistema de vigilancia de “perro Guardián” (Watchdog timer).
Protección programable de código
Modo SLEEP (“Dormido”) de bajo consumo de energía
Opciones de selección del oscilador
Programación y depuración serie In-Circuit (En circuito) a través de dos pines
Lectura/escritura de la CPU a la memoria flash de programa
Rango de voltaje de operación de 2,0 a 5,5 volts
Bajo consumo de potencia: Menos de 0,6mA a 3V, 4 Mhz, 20 µA a 3V, 32 Khz, menos de
1µA corriente de standby.
¢
Conversor A/D de 10 bits, hasta 8 canales.
¢
Puerto Serie Síncrono Master (MSSP) con SPI e I2C (Master/Slave).
¢
USART/SCI (por sus siglas en ingles Universal Synchronus Asynchronous Receiver
Transmitter , Transmisor Receptor Universal Asíncrono y síncrono) con 9 bit.
¢
Puerto Paralelo Esclavo (PSP) .[ 29]
78
7.5.2. El Seudocódigo
El código en el Microcontrolador debe ser capaz de extraer información útil de la EMG, en
este caso nuevas señales, y así dejar al operador la tarea de utilizarlas para diversas aplicaciones.
Para esto es importante definir la frecuencia de muestreo y los canales o pines del PIC a utilizar.
La frecuencia estará fijada en 1KHz (siguiendo el Teorema de Nyquist) y la masa de pines o
patas del integrado a utilizar en el período de pruebas de conceptos (antes de finiquitar y validar
el diseño), estará compuesta por cuatro pines: El pin 0 del ADC, los pines 0, 1 y 2 del Puerto B.
Cabe resaltar que una vez concluido dicho período, la masa de pines puede multiplicarse hasta 8
veces, haciendo uso de los 3 primeros pines del puerto E.
El seudocódigo planteado toma de la señal de esfuerzo analógica de entrada (pines del
conversor analógico/digital del PIC) datos para arrojar en pines de salida, previamente
seleccionados, tres señales: señal envolvente, señal cuadrada y señal triangular. Las tres señales
estarán escaladas entre 0V y 5V, donde el nivel 0 corresponde al estado de reposo y el nivel 5
corresponde a un máximo esfuerzo realizado, para esto el “programa” debe registrar ambos
niveles individualmente, y así, como ya se sabe, aunque las referencias entre individuo e
individuo no sean iguales la amplitud de la salida queda independizada de la potencia muscular
del usuario.
7.5.3. Fase Inicial
El escalamiento es producto de una fase inicial de Calibración de corta duración que el usuario
debe considerar. Esta consta de dos bloques: Calibración del Mínimo y Calibración del Máximo.
7.5.3.1 Calibración del Mínimo
Una vez ubicado correctamente los electrodos, el usuario deberá permanecer en reposo por un
tiempo indicado. En este estado existe una señal alterna de baja amplitud de voltaje y es
particular entre persona y persona. El “programa” registrará el valor aproximado del máximo
79
punto de la señal de reposo y este será la referencia que utilizará para diferenciar el estado de
reposo con algún otro estado. A este valor lo llamaremos Set point (como es denominado el punto
de referencia en muchos sistemas de control de diversas topologías).
7.5.3.2 Calibración del Máximo
Análogamente al desarrollo del apartado anterior, el usuario deberá realizar un máximo
esfuerzo por un tiempo indicado. Se registrará el valor aproximado del máximo punto de la señal
y este será la referencia que en el futuro indicará al programa que se ha alcanzado el Umbral
Máximo ante un esfuerzo.
a)
b)
Figura 7.7 Calibración a) Mínimo b) Máximo
80
7.5.4. Desarrollo
Una vez que se han registrado el Setpoint y el Umbral Máximo el usuario podría visualizar,
por ejemplo: en un osciloscopio o utilizando algún software de interfaz gráfica en una
computador con puerto serial, una señal que envuelve la señal EMG, en otro pin una señal
triangular y en otro una cuadrada, todas entre 0V y 5V si es que la señal de entrada es diferente
de cero, es decir, si es que lo leído en el pin de entrada es mayor que Setpoint.
Figura 7.8 Obtención de Envolvente, Onda cuadrada y Triangular
7.5.5. Simulación del Seudocódigo
Se utilizó el software del Sierra Wave para guardar cuatro archivos correspondientes a cuatro
personas distintas, siguiendo los mismos parámetros anteriormente manejados para la medición.
Todos los sujetos hicieron reposo y esfuerzo en un tiempo máximo de 10 segundos. Los archivos
se transformaron en documentos compatibles con Microsoft Excel. Se eligió para la simulación el
patrón correspondiente a la persona cuyos registros fueron los de menor amplitud, ya que casos
81
como este son críticos por la baja relación de amplitud Señal Esfuerzo/Señal Reposo y pueden
determinar la viabilidad y eficacia del seudocódigo planteado.
En la Figura 7.9 y 7.10 se observan todas las señales escaladas, incluso la señal de entrada
(rectificada) que además está sobre cero dado que el Setpoint ya fue calculado y es el “nuevo”
cero de la señal observada.
5
EMG original con linea de reposo=0
Triangulo Envolvente
Cuadrado Envolvente
4.5
4
Amplitud (volts)
3.5
3
2.5
2
1.5
1
0.5
0
0
1
2
3
4
Tiempo (0.0001 seg)
5
6
7
Figura 7.9 Resultado de la simulación: Salidas Ideales En Out1 y Out3 para una EMG real
rectificada.
82
4
x 10
5
4.5
4
Amplitud (volts)
3.5
3
2.5
2
1.5
1
0
20
40
60
80
100
120
140
160
180
Eje X
Figura 7.10 Envolvente de la Señal
De acuerdo a lo obtenido, todos los módulos del montaje se pueden ensamblar, en el ensamble se
deben integrar baterías como fuente de alimentación por lo que hay que agregar un componente,
como por ejemplo un diodo, que no cierre el circuito si las baterías no han sido colocadas
correctamente. También se colocarán diodos LED o Light Emisor Diode (Diodo emisor de Luz)
entre modulo y modulo para indicar su correcto funcionamiento así como también un pasador o
Switch de encendido y apagado para activar o desactivar el circuito (Ver figura 7.11).
Figura 7.11 Visualización ilustrada de la alimentación del futuro encapsulado y de cómo este no
funciona si la batería no es colocada en posición correcta.
83
CAPÍTULO 8
ANÁLISIS DE RESULTADOS
Después de haber diseñado el dispositivo siguiendo el desarrollo de los bloques: Adquisición,
Amplificación, Filtrado, Rectificación y Procesamiento dentro de los alcances y limitaciones
establecidos con anterioridad para el presente trabajo de pasantía se adquirieron señales alternas
confiables en sus diferentes etapas, asimismo por medio del algoritmo desarrollado se logró
obtener señales envolventes a partir de señales EMG (Electromiográficas) reales que pueden ser
utilizadas en diversas aplicaciones.
Si bien el montaje final del diseño no se contempló entre los objetivos de este trabajo, se hizo
imperiosa la necesidad de corroborar el correcto funcionamiento del montaje en un ambiente no
virtual, para esto se realizaron diversas pruebas con los equipos disponibles en el laboratorio cuyo
objetivo fue validar o descartar el funcionamiento óptimo de los bloques del circuito en cuestión.
Antes de proceder a adquirir los componentes correspondientes al bloque de filtrado, se evaluó
individualmente las decisiones tomadas respecto a este bloque en el Capítulo 7 utilizando el
equipo Sierra Wave (SW).
En la Figura 8.1, se observa la señal EMG resultante de realizar tres contracciones
consecutivas del bíceps, eligiendo un filtro pasabanda de 20-500Hz con un filtro Notch activado.
84
Figura 8.1 Tres Esfuerzos consecutivos con filtro Pasabanda de 20-500Hz + Notch
En la Figura 8.2, se observa la señal EMG resultante de realizar cuatro contracciones
consecutivas del bíceps, utilizando el filtro pasabanda elegido para este diseño: 100-500Hz con
un filtro Notch desactivado.
Figura 8.2 Cuatro Esfuerzos consecutivos con filtro Pasabanda de 100-500Hz
85
Se observa menos información (muestras capturadas) a la misma amplitud en µV (el eje
horizontal que corresponde a 291,5 µV) en el segundo caso (100-500Hz), o lo que es lo mismo,
los picos que sobrepasan el eje señalado tienen menor amplitud en el segundo escenario, sin
embargo el momento de esfuerzo sigue diferenciándose con claridad y los momentos
correspondientes al reposo son más estables ya que el filtro es más selectivo, por lo que el rango
elegido permite proceder con garantía en el desarrollo del dispositivo.
Una vez realizado el montaje, se hicieron pruebas con cuatro sujetos. Las mediciones se
realizaron con un Osciloscopio digital tomando como referencia horizontal siempre el mismo
momento en la señal (Ver Figura 8.3) para estimar las ganancias en las diferentes etapas del
circuito. Los valores promedio obtenidos se aprecian en la Tabla 8.1.
86
Figura 8.3 Señal EMG del sujeto X1 a través del circuito final
Tabla 8.1 Valor promedio de los Parametros Medidos en la Aplicación
Alimentación
+9v,-9v
Ganancia Total
15 000 v/v
Amplitud
.
Bloque I
Bloque II
Bloque III
Bloque IV.i
Bloque IV.ii
-*
200mv
2v
4v
3v
87
*Valor
pequeño
muy
Las diferencias observadas tanto en la visualización como en la cuantificación de la amplitud
de las señales obtenidas está relacionada con el carácter no ideal de los componentes y con el
criterio utilizado para promediar la ganancia entre etapa y etapa. Se verifica también el
funcionamiento de la primera etapa de amplificación (AD620), en donde la ganancia teórica es
1000V/V, en la cual la amplitud promedio alcanzada en la contracción muscular es de 200mv,
correspondiente a los 200µV estimados según el registro del Sierra Wave durante la contracción
para el mismo sujeto bajo las mismas condiciones, Ver Figura 8.4.
Figura 8.4 Estudio EMG del Sujeto X1 durante contracción muscular. El filtro pasabanda del SW
se fijó de 1-1KHz para que la comparación fuera lo más fiel posible, tomando en cuenta que para
la primera etapa de amplificación (AD620) la señal no ha pasado por el filtro diseñado.
Cabe resaltar que el ruido observado en las señales obtenidas (mejor cuantificado en el estado
de reposo ajustando la escala del osciloscopio) se debe al ruido introducido por la alimentación
del circuito. La alimentación consistió en dos fuentes de voltaje de un modelo antiguo, con una
salida AC y una DC, conectadas en serie con una tierra común, las fuentes estaban en estado de
abandono dentro del laboratorio por lo que se le hicieron varias limpiezas así como también
empalmes previos en algunos cables.
88
Para el futuro encapsulado del dispositivo es importante incluir algún componente de
protección, al usuario y al circuito ante desvíos de corriente que no se consideraron en este
montaje pues las pruebas y simulaciones se realizaron en un ambiente sobre seguro, premeditado
y dirigido por el operador y por el usuario. Los típicos diodos son ideales para esta función pues
consumen poca potencia pero no conducen si la corriente no va en el sentido adecuado.
A pesar de que aun así el objetivo se alcanza con este montaje, se mejorará cambiando la
alimentación por baterías, que le da la particularidad y el requisito de ser portable y mantiene al
dispositivo en el perfil de bajo costo y fácil reproducción.
89
CONCLUSIONES Y RECOMENDACIONES
Existen escenarios en los cuales es de interés adquirir y registrar la actividad eléctrica de la
persona (electromiografía, electrocardiografía, electrooculograma, etc.), en sincronía con las
mediciones cinemáticas y dinámicas asociadas al movimiento humano. En este trabajo se ha
presentado un sistema de adquisición de señales electromiográficas (EMG’s) orientado a la
electromiografía no invasiva, que forma parte de una importante cadena de investigación dentro
de la empresa, proporciona una herramienta valiosa para utilizarse en otros estudios y
aplicaciones del entorno de la bioingeniería así como también provee mayor claridad en los
lineamientos de los eslabones subsiguientes de la cadena. Así mismo, han sido discutidas diversas
técnicas para la adquisición de señales EMG’s y las consideraciones que deben ser tomadas antes
de emplear alguna de ellas.
En el desarrollo del trabajo se utilizaron algunas de las técnicas más comunes de procesado de
señales EMG’s como la rectificación de onda completa, el filtraje con topología pasabanda y la
detección de la envolvente de la señal.
En línea con la validación del diseño planteado para la obtención de señales de control a partir
de señales EMG’s se realizaron simulaciones en programas específicos para esta aplicación,
experimentos reales a nivel del bíceps izquierdo observando las señales obtenidas en un
Osciloscopio Digital y también convalidaciones con la unidad Sierra Wave.
Todo proceso electromiográfico se ve afectado por variables que van desde el tipo de unidad
muscular que se está estudiando, sea un fibra muscular donde la señal mostrada es la de unidad
motora (UM) o un conjunto de fibras, el material con el cual están construidos los electrodos,
incluyendo su medida y la disposición y orientación de estos al ser colocados en el músculo, el
proceso de colocación de los electrodos, que aunque parece muy obvio exige una serie de pasos y
cuidados rigurosos y la integración de los cables al primer amplificador. Para este trabajo se unen
a estas variables la diferenciación de los bloques concatenados que constituyen la arquitectura
modular del diseño final, los criterios y requisitos manejados en cada bloque, la elección y
evaluación de cada uno de los componentes contenidos en cada uno de los bloques, el efectivo
90
acoplamiento de la cadena y la protección o seguridad del usuario, el dispositivo y otros posibles
componentes que pudieran conectarse al conjunto. En la evolución del diseño planteado se debe
incluir el detalle de los bloques correspondientes a la seguridad del usuario y también la
protección del circuito ante descargas indeseadas provenientes de la red, si la alimentación no se
realiza con baterías y/o si la visualización de señales se realiza utilizando un computador como
interfaz, así como también los estándares regionales para este tipo de implementación (si existen).
De los resultados obtenidos se pueden especificar las siguientes conclusiones:
Las señales bioeléctricas del ser humano suelen tener amplitudes inferiores al ruido de 60Hz.
Aún cuando se utilicen amplificadores y electrodos específicamente diseñados para minimizar
este ruido, el mismo igualmente es captado. Pero este ruido puede ser filtrado, siempre y cuando
no interese medir un potencial a la frecuencia de 60 Hz.
Es válida la reducción del ancho de banda del filtro pasabanda utilizado para evitar mayor
cantidad de componentes en la circuitería y mayor selectividad, ya que el esfuerzo o señal
producto de la contracción muscular no se pierde en el rango elegido, y el uso de baterías reduce
los armónicos de la red de 120V, en el caso de que la aplicación o las pruebas se realicen con
alimentación directa de la red hay que considerar, como ya se ha dicho, el desarrollo del bloque
de seguridad.
La ganancia del circuito total contemplado en procesos electromiográficos es una
característica crítica, porque si no es adecuada (suficiente) el diseño podría arrojar resultados no
deseados para usuarios con bajísima intensidad registrada en sus procesos de contracción
muscular. En este trabajo el funcionamiento está garantizado para personas cuya amplitud en la
fase de contracción es, en promedio, 0.1mV. En el futuro se debe agregar en el modulo que
involucre ganancia un control con acceso al fabricante para manipular la ganancia deseada en un
rango más flexible para evitar resultados no deseados bien sea por la baja amplitud de la EMG
del usuario o el caso contrario que podría ocasionar saturación en los operacionales.
91
El diseño modular permite detectar las fallas con certeza y reemplazar los bloques dañados
en caso de ser necesario. También en una arquitectura modular, la principal ventaja está en la
posibilidad de que los componentes evolucionen de manera independiente sin afectar el sistema
global, de esta forma por ejemplo el PIC puede ser sustituido por otro microcontrolador con más
o menos ventajas, se pueden agregar más canales de entrada (en este caso bastaría con aumentar
los bloques establecidos en la misma proporción de los canales extra y activar los pines
correspondientes del conversor analógico digital o por sus siglas en inglés ADC en el código).
El seudocódigo desarrollado no solo provee la información necesaria para llevar a cabo el
objetivo sino que también suministra señales de salida en la misma escala de amplitud
independizando por completo las señales de control que se pueden obtener con la intensidad del
esfuerzo de cada individuo.
El proyecto en cuestión posee un gran potencial de crecimiento y desarrollo, pudiéndose
integrar a productos exitosos de la UGTS existentes como el Medicarro y redes de telemedicina
para diversos centros de salud, colocándose así a la par de sistemas de alta tecnología,
traduciéndose esto en prestigio para la empresa y mayor valor agregado al producto que ofertan.
Una vez estandarizado el producto, se puede proceder a su reproducción autofinanciada, pues el
precio a terceros puede ser muy competitivo, ya que la inversión no es muy alta (todos los
componentes contemplados son de fácil acceso económico).
Es importante señalar también que el presente informe posee como intención servir de base y
guía para futuros interesados en esta área, los cuales podrán ahorrar horas de trabajo y búsqueda
de información al consultar los capítulos referidos al marco teórico, ingeniería conceptual, básica
y de detalle, a fin de canalizar sus propuestas y obtener más rápidamente la solución a los
problemas que se les presenten. En definitiva, con la metodología de trabajo implementada, el
número de componentes considerados en el diseño y los resultados obtenidos se puede lograr el
encapsulado de un dispositivo electrónico de bajo costo y portátil, logrando así el alcance óptimo
de los objetivos planteados, y la implantación de una base promotora y enriquecedora de futuros
trabajos.
92
REFERENCIAS
[1] Documento Rector Elaborado por el Programa de Bioingeniería. Medellín Antioquia.2006.
[2]Bioingeniería. Disponible en Internet: http://www.bioingenieria.edu.ar/extension/la_facultad/
carreras/qesbioing. htm. Consultado el 10 de septiembre de 2009.
[3] Áreas de la bioingeniería. Disponible en Internet: http://www.bioingenieros.com.ar/areas.asp>
consultado el 10 de septiembre de 2009.
[4] Manal, K; González, R; Lloyd, D; Buchanan, T. A real-time EMG-driven virtual arm.
Computers in Biology and Medicine. Vol.32, 2002, pp. 25-36.
[ 5] TOLOSA, L. Desarrollo de un algoritmo para generar una señal de control para una prótesis,
basado en el procesamiento y análisis de una señal EMG, USB. 2007.
[6] La UGTS. Disponible en Internet: http://www.ugts.usb.ve. Consultado el 25 de Enero de 2010
[7] R. E. Challis y R. I. Kitney. Biomedical signal processing: Part 2: The frecuency transforms
and their inter-relationships. Med. & Biol. Eng. & Comput.29. Enero 1991. pp. 1-17
[ 8] Disponible en Internet: http:// www.wmich.edu/ece.Consultado el 03 de septiembre de 2009.
[9] Sedra, A; Smith, K. “Circuitos Microelectrónicos”.Oxford. México.pp 884-894 (1998)
[10] Dr. Klaus W. Beyenbach, Profesor de fisiología. Disponible en Internet:
http://www.people.cornell.edu/pages/kwb1/ . Consultado el 03 de septiembre de 2009.
[11] El Músculo esquelético. Saber y Entender. Junio 2003. pp. 8.
[12] GONZALEZ, D. Patologías Asociadas a desordenes en el canal iónico del Cloro. USB.
2009.
[13] Unidad de Electrocardiografía –Hospital Sant Pere Claver – Barcelona. Disponible en
Internet: http://personales.ya.com/emgnm/indexcas.htm Consultado el 03 de septiembre de 2009.
[14] Brown WF. “The physiological and technical basis of electromyography”. Boston:
Butterworth-Heinemann. (1984)
[15] Reaz, H.;.Mohd-Yasin, F. Techniques of EMG signal analysis: detection, processing,
classification and applications. March 23, 2006. Biol. Proced. 2006; pp. 11-35.
[16] Rodríguez,D.; Blanco, R.; Díaz, C.; Naranjo, J. Electromiografo Digital de ocho canales. VII
Congreso de la Sociedad Cubana de Bioingeniería. Centro de Biofísica Médica. Habana
2007.pp. 3.
[ 17] GARATE, J. Instrumentación en Electromiografía. USB. 2008.
[ 18]Cadwell Laboratories. Sierra II.Brochure, Junio 2006. pp. 4
[ 19]Cadwell Laboratories. Sierra Wave Getting Started Guide, Junio 2008. pp. 113
[ 20] Hannaford,B. Lehman, S. Short Time Fourier Analysis of the Electromyogram: Fast
Movements and Constant Contraction. IEEE Transactions on Biomedical Engineering. Vol.
BME-33. December 1986. pp.1173-1181.
[ 21] DORADO, L; A. ORTEGA; BOLAÑOS, G; CASAS, J. Acquisition and Monitoring
System of the Electrical Signals Generated in Cerebral Activity. Departamento de Física –
93
Universidad del Cauca, Popayán, Colombia.
[22] A. Orjuela, L. Calôba. Clasificación de Movimientos en Extremidades Usando Redes
Neuronales:I. Proceso Supervisado. 21° Congresso Brasileiro de Engenharia Biomédica. Rio de
Janeiro, Brasil.
[23]Recomendaciones del proyecto SENIAM. Disponible en Internet: http://www.seniam.org
consultado el 05 de Octubre de 2009.
[24] Ruiz ,A; Brunetti, F; Rocon, E; Forner-Cordero, A.; Pons, J.; Adquisición y procesado de
Información EMG en el modelado de sistemas biológicos.Grupo de Bioingeniería. Instituto de
Automática Industrial – CSIC.Arganda del Rey.Madrid. España.
[25] ESCUDERO, J;
Instrumentación.USB.
.PARADA,
M.;
SIMÓN,
F.
Tema
2_Amplificadores
de
[26] Electrodes for Stress, Holter and Event tests. Unomedical .Ver3 /UK..2006, pp. 2.
[27] Low Cost, Low Power Instrumentation Amplifier AD620. Disponible en Internet:
www.alldatasheets/analogdevices/ad620ar.pdf. Consultado el 02 de octubre de 2009.
[28] General Purpose J-Fet Quad Operational Amplifiers. Disponible en internet: http://www.
datasheetcatalog.org/datasheet/texasinstruments/tl084.pdf'. Consultado el 02 de octubre de 2009.
[ 29] Microchip Technology. 28/40-Pin 8-Bit CMOS FLASH Microcontrollers. 2001.pp. 218.
94
APÉNDICES
APENDICE A – Músculos en Cuestión (localización de un electrodo monopolar)
95
APENDICE B Localización 3D de los músculos (Visión Anatómica del Sierra Wave)
En la herramienta incluída en el Software del Sierra Wave se puede obtener una vista 3D de los
músculos bajo estudio. Para este trabajo imágenes como las siguientes fueron desplegadas:
96
APÉNDICE C – Especificaciones técnicas del Sierra Wave
97
98
APENDICE D – AD620 HOJA DE DATOS
99
100
APENDICE E – TL084 HOJA DE DATOS
101
102
APENDICE F – Código AIMSPICE para Validación de Filtro
103
APENDICE G – Validación del Seudocódigo
104
Paperbueno.pdf
http://www.todonatacion.com/Articulos/Articulos%20de%20musculacion/funcion%20motriz%2
0simple.htm
2.
84934095.pdf (en la laptop mia)
1er. Tipo: consta de dos amplificadores operacionales (AO) en la configuración de seguidor de voltaje.
2do. Tipo: es una configuración clásica de tres AO de instrumentación
3er. Tipo: es una configuración clásica de dos AO de instrumentación
SEGÚN http://redalyc.uaemex.mx/redalyc/pdf/849/84934095.pdf PÁG.4 LA IMPEDANCIA
DE ENTRADA DEBE SER AL MENOS EL DOBLE DE LA IMPEDANCIA ESPERADA EN
EL ELECTRODO.
AQUI http://www.cea-ifac.es/actividades/jornadas/XXVIII/documentos/1731-JA07_Ruiz.pdf
Se dice q la amplitud de una EMG:es 0-10mv y el rango de frec.:5hz a 2khz
Usan un filtro pasabanda 20-500hz.
Filtrado
Debido a que las señales mioeléctricas son de bajo valor, ruidos o artefactos como el ruido ambiente o en mayor
medida el ruido de línea (50hz/60hz) pueden provocar una falsa interpretación de los resultados. Por lo tanto, el
amplificador de la unidad de procesamiento necesita ser no solo lo suficientemente sensible como para detectar y
amplificar las pequeñas señales sino que también debe discriminar los ruidos o artefactos de manera de visualizar
solo actividad electromiográfica.
De anteproyecto_latex.pdf : El la fase de mantenimiento y evoluci_on del sistema, en
una arquitectura modular,
la principal ventaja est_a en la posibilidad de que los componentes evolucionen
de manera independiente sin afectar el sistema global. En un sistema con un alto
acoplamiento entre los componentes se di_cultan las tareas de mantenimiento
y evoluci_on modular del sistema, debido a que, al realizar alguna modi_caci_on
en cualquiera de ellos, implica necesariamente un cambio en por lo menos otro
componente.[.
105
No olvidaar: considerando que la resistencia tiene + 5% de tolerancia
PONER ENTRE LAS CONSIDERACIONES A DEMAS DE LO DE PROTEGER LA
ALIMENTACIÓN CON UN DIODO TAMBIEN PROTEGER AL CODIGO DE GENTE Q
USE EL APARATO PARA JUGAR O SIN HABER HECHO LA CALIBRACIÓN
PORQ EL LADO IZKIERDO??
ESTA BUENO LO Q DICE EL IP ANÁLISIS.PDF
Representative EMG signal with five turns (T1-T5) which define four
segments (S1-S4), whose durations (D1-D4) and amplitudes (A1-A4)
are indicated.
------Cap.3: Marco teórico:
Distintos capitulos:
106
Ing. Conceptual:
Ing. Basica:todas las propuestas
Ing. De detalle: las decisiones que se toman a partir de la ing. Básica. Como va a ser la
configuración. Parte de cálculos. Como implementar la propuestas.
Objetivos logrados, metodología fue eficiente y que a futuro puede ser la base para proximos
trabajos. Recomendaciones.
La parte de cómo funciona el musculo y que de alli se obtienen señales y tal van en el marco
teorico la parte del modelo electronico y de cómo funciona electrónicamente las EMG la
ponemos en ing. Conceptual. Que parámetros de info s pueden obtener a partir de una EMG.
ANEXOS:
COSAS DEL SIERRA WAVE
DATASHEETS
El pdf con la simulación del ad620 proteus
107