Manual LADCP del IEO A Coruña - Unidades de gestión de la ULPGC
Anuncio

Manual LADCP IEO
SISTEMA LADCP WH300 DUAL PARA EL IEO. MANUAL DE MONTAJE, UTILIZACIÓN,
MANTENIMIENTO Y PROCESAMIENTO
Con las contribuciones de Ricardo Sánchez, Manuel Ruiz Villarreal y Miguel Ángel Zorita y
aportaciones del Grupo de Física IEO-Norte
Introducción
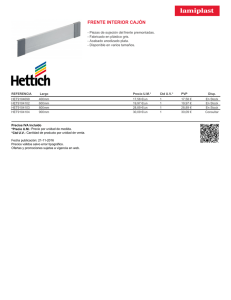
Existen varios métodos para obtener perfiles de velocidades en el océano. Uno de los más
empleados es el LADCP (lowered acoustic doppler current profiler), que permite obtener perfiles
durante una estación hidrográfica. El perfilador forma parte del bloque CTD/Roseta y conlleva un
esfuerzo operacional relativamente pequeño en relación a la información obtenida.
Tradicionalmente el sistema consiste en un ADCP de 150 o 300 kHz mirando hacia abajo
montado en una roseta. Configuraciones más recientes permiten incluir 2 o más instrumentos para
mejorar la precisión (modo Dual). Cada aparato envía un pulso acústico (ping) por segundo de cada
uno de los cuatro transductores y procesa la señal reflejada. La intensidad del eco permite medir la
velocidad de las partículas en movimiento a través del efecto doppler de la señal, así como estimar la
calidad de la medida. El rango de datos útiles para cada uno de los haces (beams) es normalmente de
100-300 m contados a partir del instrumento, a lo largo del cual es posible estimar un perfil de
velocidades. Conociendo la inclinación, giro y balance así como la posición del norte (brújula del
ADCP) es posible transformar esas velocidades en coordenadas cartesianas.
Figura 1. Esquema mostrando el principio de funcionamiento del LADCP (de http://ladcp.ldeo.columbia.edu/ladcp/)
Para obtener la velocidad absoluta de la corriente, el movimiento de la roseta durante el perfil
(desconocido, pero estimable) debe ser eliminado durante el post-procesado. Existen varios métodos
para esto, siendo los más comúnmente utilizados el de la Universidad de Hawai (Eric Firing) y del
LDEO (Martin Visbeck). El método de Firing aisla el movimiento de la roseta al superponer, y
promediar los perfiles de las cizallas verticales para construir un super-perfil. Éste es integrado
verticalmente para obtener la velocidad baroclina, siendo la constante de integración la velocidad
barotrópica (incógnita a priori), que se computa como la suma de la velocidad media y la deriva del
barco, menos una corrección para tener en cuenta la velocidad de descenso. El método de Visbeck
soluciona un problema inverso para aislar el movimiento de la roseta usando una técnica de mínimos
Manual LADCP IEO
cuadrados. Este método permite aplicar condiciones de contorno, como pueden ser las velocidades
referenciadas en el fondo (bottom-tracked), y datos de navegación y de doppler de casco, para
mejorar los perfiles. Éste método permite además incluir más de un instrumento durante el
procesado. Ambos métodos difieren en los algoritmos de cálculo pero, si los datos son buenos, deben
proporcionar resultados razonablemente similares.
Un factor clave en la calidad de las medidas es la abundancia de reflectores pasivos en la
columna de agua. Frecuentemente ocurre que por debajo de los 1500 m de profundidad los
instrumentos de 300 kHz no consiguen recuperar un número satisfactorio de ecos y arrojan
velocidades poco realistas. Una opción para mejorar las medidas es emplear el sistema Dual así
como incrementar el número de ecos en cada bin de profundidad. Otra opción sería disponer de un
instrumento de menor frecuencia, típicamente un BoadBand 150 kHz, que asegura un mejor reflejo,
sobre todo en aguas profundas 1 . De todas formas, el BroadBand ya no se fabrica y la comunidad
LADCP está esperando un 150 kHz que aguante el estrés de los ciclos continuados de presión.
Configuración, puesta en funcionamiento y descarga de datos.
El sistema LADCP del IEO consiste en dos perfiladores doppler Workhorse (WH) RDI 300
kHz sincronizados y configurados en modo LADCP. El que funciona como Los instrumentos se
montan en la roseta en unas estructuras metálicas especialmente diseñadas para esta configuración,
que consiste en uno de los instrumentos apuntando hacia abajo (sentinnel MASTER, MWH) y otro
hacia arriba (monitor SLAVE, SWH). La denominación MASTER/SLAVE hace referencia a cuál de
ellos se encarga de sincronizar la emisión de los pings, para evitar interferencias de las señales de
ambos instrumentos. Para ello, es necesario conectar físicamente ambos correntómetros según se
indica en la sección de montaje. Ambos instrumentos tienen sensores de presión, temperatura,
heading, pitch, roll, pueden descender hasta 6000 m y pueden ser configurados como LADCP.
Apenas el instrumento MASTER (s/n 2908) está dotado de Bottom Track. Si se desconfigurasen
estas opciones existen programas para actualizar el firmware y aprovechar estas actualizaciones (ver
más abajo).
Para conectar y programar los equipos con el PC tenemos que haber instalado todo el
software de manejo (WinADCP, PlanADCP, RDITools). Es interesante disponer de la
documentación de comandos avanzados de RDI (Workhorse Expert Command Guide en
http://www.rdinstruments.com/cc_documents.html). Una vez se han introducido todos los
parámetros para que el ADCP pueda trabajar correctamente en cada perfil, el proceso es mecánico:
Picamos acceso directo a BBTalk (esta es una herramienta de RDITools).
-
Connect To: “Device: WorkHorse” y “COM Port: COM1/COM2” 2 .
Port Settings: “Baud Rate: 115200 (máximo); Parity: None; Stop Bits: 1; Flow
Control: 1”
“Send Break On New Connection: activado; Send CK On Baud Rate Change (CB
Command): activado“
Finish. En la consola debe aparecer el siguiente mensaje:
[BREAK Wakeup A]
1
En los informes de campaña de B. King que nos descargamos de la red, relacionan especulativamente este hecho con la
física de los “deep backscatterers” que reflejen más efectivamente la frecuencia de 150 kHz que la de 300 kHz
2
El número de puerto COMx depende de la configuración/autodetección de la tarjeta PC-MCIA. En caso de duda se
puede correr el ‘Autodetect ADCP’
Manual LADCP IEO
WorkHorse Broadband ADCP Version 16.28
RD Instruments (c) 1996-2005
All Rights Reserved
Esperamos el mensaje de conexión en el que nos aparece la verificación de la misma. En caso de
que no se produzca la conexión pulsamos sobre el icono B de la barra de herramientas (send break;
manualmente se puede hacer pulsando la tecla ‘Fin’, o ‘End’) y esperamos la conexión; si continúa
el problema activamos el icono que está al lado del anterior (en él aparece una mano señalando con
un dedo sobre una hoja escrita) y pulsamos “ Auto Detect ADCP ...” Si no se consigue solucionar el
problema habrá que buscarlo en otra parte del equipo o instalación.
De forma previa al montaje hay que verificar:
1- Calibración de la brújula de los ADCPs. Preferentemente se efectúa en modo terminal con
BBtalk. Alternativamente podemos emplear WinSc. Aunque este paso es indispensable, hasta
la fecha nunca se ha conseguido el correcto calibrado de la brújula de ambos, habiendo
empleado siempre los parámetros de calibración de fábrica3 . La calibración no se debe hacer
en el barco. Tanto el movimiento como los campos magnéticos generados por el casco y las
máquinas distorsionan la correcta calibración. Además, si el armazón que sujeta los
correntómetros puede generar algún tipo de campo magnético es necesario calibrar los WH
una vez montados 4 . En función de la complejidad e intensidad de este, la calibración podrá
corregirlo.
Figura 2. Imagen mostrando la calibración de la brújula de un ADCP sobre una mesa no ferromagnética.
2- Una vez conectados con BBTalk debemos ejecutar el comando OL<ENTER> para comprobar
la configuración, principalmente si tienen la capacidad de funcionar en LADCP y si el
Bottom-track (BT) está activo. Si no etán activados como LADCP, debemos actualizar el
firmware de esta ejecutando ‘Activate_LADCP WH 2908.exe’ o ‘Activate_LADCP WH
3912.exe’. Para el BT (opción disponible sólo en el MASTER), habría que ejecutar ‘Activate
bottom track on WH 300 kKz SN 2908.exe’. Para el correcto funcionamiento es
FUNDAMENTAL QUE EL MÓDULO LADCP ESTÉ ACTIVO EN AMBOS
INSTRUMENTOS, Y QUE EL BOTTOM TRACK LO ESTÉ EN EL MASTER.
3
Durante la reparación del sentinnel (SLAVE) en San Diego se llevaron a cabo las calibraciones correspondientes (julio
de 2006)
4
En principio la roseta que empleamos está construida con materiales no ferromagnéticos, por lo que no deberían afectar
de forma importante a la brújula de los ADCPs.
Manual LADCP IEO
>ol
FEATURES
--------------------------------------------------------------------Feature
Installed
--------------------------------------------------------------------Bottom Track
Yes
Water Profile
Yes
High Resolution Water Modes
No
Lowered ADCP
Yes
Wave Gauge Acquisition
No
Shallow Bottom Mode
No
High Rate Pinging
No
See your technical manual or contact RDI for information on how to
install additional capability in your WorkHorse.
3- Los instrumentos utilizan baterías no recargables originales RDI (degaussed). Conviene
comprobar la carga necesaria para la campaña. Existe una aplicación Excel para tal efecto
‘LADCP Time Calculator.xls’
4- Para realizar estas operaciones necesitamos un ordenador con 2 puertos series. Actualmente
tenemos 2 PC-MCIA RS232. Las 2 Quatech DSP-100 funcionan bien. También hemos
adquirido adaptadores USB-RS232, pero no hemos conseguido que vayan.
Montaje
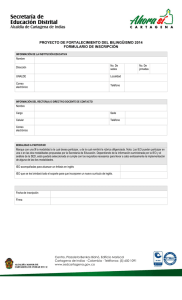
El procedimiento detallado para el montaje está ilustrado en las siguientes fotos. El MASTER
mirando para abajo (Sentinel 2908) y el SLAVE (Monitor 3912) mirando para arriba (Figura 3).
MASTER
Figura 3. Detalle de los instrumentos una vez montados en la roseta.
SLAVE
Manual LADCP IEO
Las piezas de anclaje a la roseta normalmente estarán ya colocadas. Si se hubiesen
desmontado las sujeciones de la roseta 5 hay que recordar que MASTER y SLAVE deben coincidir
en la vertical, tal y como se muestra en la Figura 4.
Figura 4. Detalle de la alineación vertical de ambos instrumentos en la roseta.
La distribución de estas piezas es simple. En todos los casos cuentan con tres puntos de unión
a la estructura de la roseta, consistentes en pares de espigas que con una horquilla y tuercas
amordazan los tubos de la roseta. El MASTER y las cajas estancas de baterías van sujetos a estas
estructuras con unas abrazaderas. El SLAVE descansa en una jaula, no tiene abrazaderas para fijarlo.
Una placa constituye el anclaje, y cuenta con cuatro agujeros que coinciden con los de la caja
estanca del instrumento. Entre el ADCP y el anclaje se colocara la protección y una lámina de
neopreno. Todo se asegura bien con tornillos pasantes. En este momento, es bueno intentar que
maestro y esclavo queden alineados tomando como referencia el beam 3 que tiene un puntito al lado
del haz y teniendo en cuenta que el esclavo queda fijo y el maestro el que se gira. Como se indica
después, una vez hecho el cableado se puede realizar una comprobación con un perfil en seco.
ES IMPORTANTE QUE ENTRE TODAS LAS SUPERFICIES DE CONTACTO ENTRE
LAS CAJAS ESTANCAS Y LAS ESTRUCTURAS DE ANCLAJE SE COLOQUE UNA LÁMINA
DE NEOPRENO DE 5mm DE ESPESOR. Esto afianza la sujeción y asegura el correcto
funcinamiento de los instrumentos acústicos. Para facilitar el montaje es recomendable sujetar cada
una de las láminas a las abrazaderas de acero con una cinta adhesiva (americana o aislante).
Las sujeciones o ‘cunas’ de las baterías se colocan en la base, sobre el aro inferior y la barra
que lo atraviesa diametralmente. Cada una de las dos sólo encaja en uno de los lados, como se
muestra en la Figura 5.
5
En la última campaña -RadProf0206- no utilizamos el SLAVE y se desmontó su sujeción, funcionando el sistema como
de forma clásica. Esto repercute en la calidad de los perfiles de velocidades al aumentar la desviación típica de la
observaciones, pero permitió equilibrar la roseta y redujo notablemente los giros durante la estación.
Manual LADCP IEO
.
Figura 5. Detalle de la instalación de las baterías en la parte baja de la roseta.
Una vez terminada la fijación de los equipos se debe proceder al cableado. Si izamos la
roseta para facilitar el montaje de los instrumentos se debe tener especial cuidado de no pisar
ninguno de los cables con la estructura del carrusel. Los cables se aseguran a la estructura teniendo
en cuenta no formar grandes curvaturas ni producir fuertes ligaduras que comprometan, con el uso
prolongado, la vida útil del cable. Si sólo empleamos el MASTER, se conecta el cable en ‘T’ con el
tramo corto a batería, la terminación ♀ a ADCP y terminación ♂ a cable I/O. Si las configuración es
Dual debemos seguir el esquema de la “LADCP User’s guide” de RD Instruments (pag. 24;
diagrama 1 ADCP a cada batería), como indica en la Figura 6:
Manual LADCP IEO
Figura 6. Conexiones MASTER/SLAVE usando baterías externas.
De cara a una rápida maniobra, resulta útil que los dos conectores de comunicación se fijen
en el borde de la roseta, así como que marquemos los cables del MASTER (abajo) y SLAVE (arriba)
en los dos extremos del cable en ‘X’ en la roseta y en los cables WH estándar (cables de datos y
alimentación al PC). Es importante la correcta colocación de los cables de datos que van desde los
instrumentos hasta el PC de control y descarga. Deben poder llegar hasta los conectores en la roseta
donde esta descanse entre perfil y perfil, teniendo en cuenta que la roseta nunca se posa en la misma
orientación (Figura 7).
Manual LADCP IEO
Figura 7. Detalle con la posición final de los terminales de comunicación de los ADCPs.
Una vez acabado el montaje de los instrumentos tenemos que verificar el equilibrado de la
roseta. Esto se debería conseguir con la correcta distribución de unos contrapesos de plomo a lo
largo del aro inferior de la estructura.
En segundo lugar es importante que los ADCPs estén alineados. La orientación (heading)
debe ser la misma para los dos instrumentos, contando con un punto al lado del transductor nº 3
(“Norte”del instrumento) como referencia. Para verificar la correcta alineación se recomienda hacer
perfiles en seco 6 e inspeccionarlos rápidamente con WinADCP para comprobar en la tabla generada
que la orientación (en grados) es la misma para los dos instrumentos.
Figura 8. Detalle del sentinel (SLAVE) en el armazón superior.
Configuración.
Si utilizamos la configuración Dual, los instrumentos deben estar conectados en modo
MASTER/SLAVE, de forma que el primero coordine la emisión de los pings para evitar
interferencias entre ambos. En cada perfil se transmiten los parámetros de configuración a cada uno
de los instrumentos. La calidad de los datos va a depender de su correcta configuración. Típicamente
debemos especificar el intervalo de emisión de pulsos, el retraso en la sincronización de
MASTER/SLAVE, el tamaño y número de celdas (bins), los filtros para outliers, etc. Estos
parámetros se transmiten al instrumento a través de ‘deployment command files’, que se ejecutan
6
Para que el esclavo grabe datos en un perfil en seco hay que hacer un perfil de unos 15 minutos o más.
Manual LADCP IEO
mediante el ‘F2’ una vez conectado el instrumento. En configuración Dual debemos tener dos
ficheros: M*.scr para el MASTER y S*.scr para el SLAVE. Copias de estos ficheros se adjuntan al
final del documento.
En la campaña de febrero de 2006 los parámetros empleados eran los siguientes (con un solo
instrumento – el MASTER):
RN MLADCP ; Name data file
ED0000 ; Set transducer depth to zero
ES35 ; Set salinity to 35ppt
EX11111 ; Set system coordinate.
TE00000100 ; Set one ensemble/sec
TP000100 ; Set one second between pings
LD111100000 ; Set LADCP to output Velocity, Correlations, Amplitude, and Percent Good
LP1 ; Set one ping per ensemble. Use WP if LADCP option is not enabled.
LN020 ; Set to record 20 bins. Use WN if LADCP option is not enabled.
LS1000 ; Set bin size to 1000 cm. Use WS if LADCP option is not enabled.
LF0176 ; Set blank to 176 cm (default value)
LV170 ; Set max radial (along the axis of the beam) water velocity to 176 cm/sec.
LW1 ; Set ADCP to narrow bandwidth and extend range by 10%
EZ0111111 ; Set to use a fixed speed of the sound
EC1500 ; Set speed of sound value.
1500 m/sec is default.
EA00000 ; Heading alignment set to 0 degrees
EB00000 ; Heading bias set to 0 degrees
CF11101 ; Record data internally
CK ; Save set up
CS ; Start pinging
$D3 ; Delay 3 seconds
Recientemente y basándonos en los resultados adquiridos hasta la fecha y aprovechándonos
de la experiencia de los técnicos del Southampton Oceanographic Centre, hemos introducido algunas
modificaciones a estos ficheros con objeto de mejorar la calidad de los datos. En general los ecos
recibidos por ambos WH (300 kHz) sufren bastante en estaciones profundas a partir de los 1500 m.
Este problema parece estar relacionado con la física de las partículas profundas, especialmente en
aguas profundas limpias.
En principio se debería poder minimizar el error en cada celda al incrementar la frecuencia de
emisión de los ping. Una posible solución podría ser configurar los instrumentos para emitir cada
0.95 s. Esto se puede hacer configurando el MASTER ‘ping interval’ a cero (comando TP00:00.00), e
imponer un tiempo de espera de ping asíncrono a 0.3 s (SW00300; el MASTER manda un pulso al
SLAVE para que éste dé su ping. Debido a la configuración particular de cada instrumento existe un
tiempo diferente para iniciar el ping. Al añadir el atraso de 0.3 s, se pueden acompasar las dos
unidades). No obstante parece comprobado que esta opción proporciona apenas mejoras marginales.
En función del ancho de banda los ADCP pueden configurarse bien en modo 0 (LW0) o modo
1 (LW1). El esquema recomendado es el modo 1, que proporciona un pulso con el ancho de banda más
estrecho, permite un incremento del 10% en el rango a expensas del incremento en la desviación
estándar. En teoría, si el MASTER pierde tanta calidad en profundidad, podría ser ventajoso obtener
celdas con menor error a expensas del alcance. Sin embargo la opción de configurar los instrumentos
en modo 0 experimentada por los técnicos del SOC arrojó resultados negativos, siendo por tanto
preferible la opción del modo 1.
Instrucciones para el encendido de los LADCP y la descarga de datos
El presente protocolo está basado en el informe de campaña JR67 (Brian King et al.) y su
adaptación al equipo LADCP del IEO. Se recomienda usar este protocolo en conjunción con el
estadillo incluidos al final del presente manual.
Manual LADCP IEO
Si no hay posibilidad de tener NMEA (GPS) integrado en el CTD es imprescindible grabar
un fichero de navegación. Aunque el software de post-procesamiento en principio es capaz de
corregir el desfase, un aspecto crítico es la sincronización del reloj de los ADCPs con el CTD
(preferiblemente sincronizado con NMEA con un GPS), y que los dos ADCP estén perfectamente
sincronizados.
Conexión física. Generalidades.
1- Al iniciar la campaña debemos sincronizar la fecha y hora de los equipos a utilizar en la
adquisición de datos. Además, sincronizaremos los ADCP con el CTD. Esto requiere
sincronizar primero el PC de la roseta y el/los CTDs con la hora científica (típicamente
GMT) del NMEA, y posteriormente el PC del LADCP con el de la roseta. Finalmente
sincronizamos ADCP y PC con el comando <Ctrl. T> en la consola del BBTalk.
2- Instalar el cableado comunicando PC con roseta a lo largo de la cubierta, procurando
resguardar los cables para interferir lo menos posible con el trabajo a bordo de los demás
equipos. Conectar los instrumentos (cables de las terminaciones de la roseta) al PC. EL
MASTER tiene que conectarse al puerto COM1, el SLAVE al puerto COM2 7 . Se marcará
uno de los cables para agilizar la operación. Normalmente el del MASTER es el de más
abajo y puede marcarse con una brida o una cinta de color.
3- Control de la carga de las baterías. No es necesario hacerlo cada estación, pero conviene
tener una estimativa diaria del consumo y vigilar que éste no cae por debajo de 31 V. Con un
pack de baterías originales RDI nuevas debemos tener para toda la campaña. Su voltaje
nominal es de 45 V. Para medir la carga de las baterías puede emplearse un polímetro en los
dos agujeros del cable de conexión que están opuestos a los situados formando el 5 del dado.
En Radprof0904 el voltaje inicial era de 43V y quedó en 39 V.
MASTER/SLAVE: comunicación y puesta en funcionamiento.
1- Picar BBTalk en la consola del PC y abrir una ventana para el puerto COM1/COM2. La
velocidad de conexión es de 115200 baudios. En la 3ª ventana marcamos las casillas “Send
Break on new connection” y “Send CK on Baud Rate Change” Ha de aparecer un mensaje
conforme se ha enviado un break y luego el símbolo de introducir comandos:
[BREAK Wakeup A]
WorkHorse Broadband ADCP Version 16.21
RD Instruments (c) 1996-2002
All Rights Reserved
>
Si no se despierta, mandar un break para despertar al ADCP pulsando el icono B de la barra
de herramientas o con la tecla <Fin> o <End>. Si falla la conexión, chequear el cable de
comunicaciones o los parámetros de conexión (baud rate, puerto COM, paridad, …) Si sigue
sin conectar o aparecen símbolos extraños, hay que ir a la ventana a la derecha del B (que
tiene una hoja y un dedo) y pinchar “auto detect ADCP” 8 . Si sigue sin conectar, cerrar todos
7
Recordar que el orden de los puertos, aunque es configurable, depende de la detección automática de la tarjeta PCMCIA
8
Algunas veces puede haber algún problema con el firmware, de forma que los parámetros de conexión
(definibles por el usuario) y el reloj se vuelven a unos defaults. Para restablecer la velocidad a 115200 bd
debemos modificarlo manualmente con el comando CB811 (ver ayuda tecleando CB? en la consola de BBTalk o
Manual LADCP IEO
los BBTalk y comprobar que los conectores están bien conectados a los puertos serie del
ordenador. Si sigue sin comunicar desconectar todo y esperar 5 minutos (es el protocolo de
comunicación). Si aún así no comunica, verificar baterías. Si el problema no es de las baterías
no debemos limpiar los conectores ni cables con CRC u otro producto abrasivo. Con estos
productos, aunque vuelva la conexión en cubierta, bajo presión el cable y conexiones pueden
quedar más desprotegidos. Entonces debemos sustituir el cableado. Debemos llevar juegos de
cables de sustitución.
NOTA: SI ALGUNO DE LOS INSTRUMENTOS NO HA RECIBIDO ÓRDENES EN MÁS DE 5
MINUTOS SE DESCONECTA AUTOMÁTICAMENTE; EN ESTE CASO TENEMOS QUE VOLVER A
EMPEZAR TODO EL PROCESO
2- Ejecutar <F3> para crear un archivo de registro ‘log’ donde se almacenarán todas las órdenes
y demás incidencias de este instrumento. Podemos dar un nombre del tipo
C:\VACLAN06\ladcp\logfiles\cast###M.txt. o C:\VACLAN06\ladcp\logfiles\cast###S.txt. La raiz
‘cast###’ (donde ### es el número de cast) es útil si el almacenamiento se hace por orden de
cast. Las terminaciones ‘*M.txt’ y ‘*S.txt’ hacen referencia al MASTER/SLAVE.
3- El reloj del ADCP suele derivar bastante. Por tanto es necesario verificar el reloj del
MASTER/SLAVE con el reloj científico. Éste es normalmente el reloj del PC, que, por
costumbre, debe estar previamente sincronizado con la hora GMT. Esta hora debe ser la
misma hora que la del CTD y su PC. Para efectuar este control teclear TS?<ENTER> en la
consola del BBTalk. Si existe desfase debemos resetear el reloj de cada uno de los LADCP
tecleando TSyyyMMdddhhmmss<ENTER>, o bien con el comando <Ctrl T>.
4- Comprobar la memoria disponible mediante RS?<ENTER>. El SLAVE tiene más memoria
que el MASTER (500 frente a 120 MB), lo cual debería dar para una campaña casi completa
(los datos del MASTER de la RadProf0206 ocuparon 153 MB). No obstante, para evitar
posibles conflictos debemos limpiar con cierta frecuencia la memoria aplicando RE
ErAsE<ENTER> (case sensitive). Ésto debemos hacerlo sólo una vez los datos hayan sido
transferidos, verificados y salvaguardados. Una práctica habitual es borrar la memoria
cuando ésta esté ocupada al 50%.
5- (opcional). Teclear PA<ENTER> para realizar los controles de diagnóstico. Esto lleva un
tiempo. Nota: el Receive Path (PT3) y el Bandwidth (PT6) pueden fallar para los tests
realizados en seco. Los demás controles deberían pasar.
6- Presionar <F2> para cargar el fichero de comandos SLAVE.scr y MASTER.scr empezando por el
esclavo. El informe detallado de los contenidos de estos archivos se pueden encontrar al final
del presente documento. A partir de la ejecución de los *.scr los LADCP deberían comenzar
a ‘pingear’
7- Presionar <F3> para detener los archivos de registro. (no es necesario, se paran solos).
8- Desconectar cables de conexión de los ADCPs y poner los conectores ciegos o “dummies”
9- Quitar las tapas amarillas.
en el manual ‘WH commands and output data format’) seguido de CK (aunque esto es redundante si marcamos
en la ventana inicial “Send CK on Baud Rate Change”)
Manual LADCP IEO
10- Comunicar por walkie o teléfono con el puente que ya se puede bajar la roseta.
Deberíamos verificar que las acciones de los puntos 1-4 se registran en papel, según el estadillo
incluido al final del presente documento. Esto, además de facilitar la posterior organización y
renombramiento de los archivos, permite asegurar el correcto desarrollo de todos los pasos y que
no omitimos ninguno.
Detención de la adquisición. Descarga de los datos.
1- Al acabar el perfil, llevar un papel para secar. Se secan los cables antes de quitar los
conectores ciegos o ‘dummies’. Si hubiese entrado agua se vuelve a secar con cuidado antes
de conectar los cables de datos a la terminaciones en la roseta. Recordar que normalmente la
del MASTER es la de más abajo, y que previamente hemos marcardo con una brida o una
cinta de color.
2- Después de cada perfil es recomendable aclarar con agua dulce los instrumentos y colocar las
tapas de plástico a cada ADCP, para proteger a los transductures del sol y de posibles
arañazos.
3- Ejecutar BBTalk según se indica en el punto 1 del epígrafe anterior.
4- Comenzar con el SLAVE. Verificar el número de estaciones con RA?<ENTER> y examinar
los contenidos de la memoria con RR<ENTER>. Es preciso tener en cuenta que, algunas
estaciones debido a la larga duración o el excesivo tamaño pueden aparecer como más de un
archivo. En este caso debemos volcar ambos ficheros. P. ej. puede aparecer una pantalla de
este modo:
MLADC000.000
MLADC000.001
MLADC002.000
MLADC003.000
MLADC003.001
En este caso hay 3 casts: los 1 y 3 tienen dos
archivos distintos, mientras el 2 solo tiene
uno.
5- Volcado. En la barra de herramientas ir a File –> Recover Recorder. A veces hay que repetir
este proceso hasta que realmente comienza a bajar los ficheros. Seleccionamos la carpeta
dónde queremos archivar. Seleccionar C:\VACLAN06\ladcp\MASTER\ para los perfiles del
MASTER y C:\VACLAN06\ladcp\SLAVE\ para los del SLAVE. Después de confirmar una pantalla
nos muestra los archivos que tiene en memoria el ADCP. Seleccionamos el archivo para
volcar (normalmente será el último el que queremos descargar). El volcado puede llevar
varios minutos.
6- Comprobación de volcado correcto: En la ventana del BBTalk tecleamos el comando
RR<ENTER>. Con él comprobamos lo que hay en memoria y el tamaño de los archivos, para
asegurarnos si hemos descargado totalmente el fichero correspondiente ver el estado de la
memoria (espacio ocupado/libre).
7- Verificar con WinADCP que el número de ensembles y la calidad de los datos son
razonables. Esto no es esencial, ya que los errores de fondo se detectan realmente durante el
procesamiento posterior, pero puede ayudar a detectar errores en la adquisición o en la
Manual LADCP IEO
comunicación. Hemos detectado a veces problemas en alguno de los haces al comprobar la
intensidad del eco de cada uno (En Options/Chart Options/Contour).
8- Una vez finalizado el volcado apagamos los instrumentos con CZ<ENTER> hasta la siguiente
estación. Posteriormente hacemos una copia del archivo en otro directorio (y a ser posible
hacemos un back-up en otra unidad física) renombrando, ese mismo fichero, de acuerdo con
la nomenclatura que se adopte en la campaña. Típicamente los renombramos en función del
cast: para el MASTER podría ser C:\VACLAN06\ladcp\MASTER\cast###d.txt mientras que el
SLAVE podemos renombrarlo como C:\VACLAN06\ladcp\SLAVE\cast###u.txt (‘d’: downwardlooking; ‘u’: upward-looking). Así tendremos ya dos copias de cada perfil.
Nociones sobre el control del funcionamiento y el procesamiento
Inspección visual con WinADCP
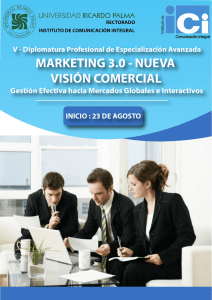
Una vez acabado el perfil se puede controlar el funcionamiento de los equipos con la ayuda
de WinADCP. Abriendo el fichero podemos detectar si el BT ha funcionado correctamente en el
MASTER. En los ejemplos de la Figura 9 (RadProf0206) vemos en cuál de los ficheros el ping del
BT detecta el fondo. Asimismo la intensidad de eco permite evaluar de un modo general la calidad
de la señal.
Figura 9. Intensidad promedio de eco para el cast012 (izquierda) y cast040 (derecha) de la RadProf0206. En ambos perfiles se ha especificado como
opción de mapeado ‘BT Depth’ en ‘Contour/appearance’, y ‘Processing/End of Profile’, dentro de ‘Charting options’.
Si en la inspección visual no observamos el fondo debemos cerciorarnos que está
configurado con el comando <OL> en BBTalk, y proceder a la actualización del firmware en caso
negativo.
Aunque la roseta tiene una aleta estabilizadora es conveniente indicar al puente que intente
que el cable baje vertical. A pesar de esto, es posible que haya balanceos de la roseta o rotaciones
que deben evitarse. Es posible evaluar el funcionamiento, tirones y giros de la roseta, como muestra
la Figura 10. Recordemos que un número excesivo de rotaciones puede afectar a la calidad de los
datos, así como a la seguridad a bordo y la vida del cable.
Manual LADCP IEO
Figura 10. Ancillary data para el cast012 (arriba) y cast040 (abajo) de la RadProf0206. En ambos perfiles se ha especificado como opción ‘options/max
ensembles’ 9000, incluyendo heading, pitch, roll, y pressure. Para conseguir esta gráfica marcar en Windows/subset y en Options/Max Ensembles subir
el número máximo de sub-set ensembles.
Software de inversión de datos de LADCP de Martin Visbeck
Este software está desarrollado en el Lamont-Doherty Earth Observatory (Earth Institute,
Columbia University). Está escrito por Martin Visbeck y se basa en una serie de funciones y scripts
escritos en Matlab. El paquete así como documentación puede obtenerse en
(http://ladcp.ldeo.columbia.edu/ladcp//software/). La versión 8b tiene bastantes cambios menores y
algunas modificaciones significativas con respecto a la versión 7. Por ejemplo, los archivos
‘comunes’ están agrupados en un directorio específico, mientras que los archivos ‘locales’ se
organizan en otra localización específica que se ajusta para cada campaña.
Además, el ‘weigthing’ de la solución inversa se ha alterado notablemente. El cambio más
significativo ha sido que la v8 utiliza los datos de BT para constreñir las U_ctd, mientras que las
versiones anteriores los utilizaban para constreñir las estimaciones de U_ocean directamente a lo largo
del rango donde existen datos de BT. Otros cambios tienen que ver con el modelo de arrastre,
aunque de momento está en fase beta y no se aconseja su uso incontrolado. Existe además una nueva
constraint que permite restringir la energía proyectada en cualquiera de los modos verticales
ps.smallfac. Para perfiles muy profundos esto reduce shears anómalos debido al ‘random walk’
esperado para estas cizallas. Esta constraint se incluye por defecto, aunque con bajo peso. También
se han modificado varios aspectos de la función de carga de datos (loadrdi.m). El cambio más
significativo es que para construir datos de BT a lo largo del perfil se ha trasladado a una rutina
dedicada (getbtrack.m), que también guarda los datos de BT para un aplicar test de consistencia.
Finalmente la v8 tiene compatibilidad completa con datos georeferenciados de RDI. Otro cambio
significativo es el esquema más elaborado para detectar los desfases entre CTD y LADCP
(loadctd.m).
La estructura del procesamiento de los datos de LADCP es como sigue:
Primero tenemos que configurar un fichero para el procesamiento por lotes de toda una
campaña, de forma que no es necesario construir un fichero-m para cada estación y permite el
reprocesamiento de todos los perfiles (ladcpbatch.m). Éste está en principio sujeto a unos parámetros
iniciales estándar. Éste está detallado en el siguiente epígrafe. En este fichero los nombres de entrada
de cada campaña se asignan en la estructura ‘f’: uno para el MASTER/SLAVE, otro para la serie
temporal de CTD, otro para la serie temporal de navegación (en nuestro caso el mismo que el CTD),
otro para el perfil de CTD procesado (un .mat en nuestro caso), y el perfil de SADCP (todavía no se
ha aplicado en ninguna de nuestras configuraciones). Algunos parámetros específicos para cada
campaña vienen por defecto, por ejemplo la resolución vertical de los datos de salida (ps.dz = 10
[m]).
El procesamiento principal de los datos de LADCP se inicializan llamando a
script realiza las siguientes acciones:
LAPROC.
Este
Manual LADCP IEO
1-
loadrdi.m:
carga los datos de ADCP y fusiona los datos del MASTER/SLAVE en una única
matriz
23-
456-
7-
getserial.m:
asigna el número de serie al instrumento, bien a partir del log de la estación o de
una tabla que descodifica el NS de la CPU
loadnav.m: es un fichero local quue codifica la navegación del barco y obtiene su posición en
función del tiempo. Esta función asume que los tiempos del ADCP y de la navegación son
los mismos (importancia de sincronizar los equipos). La posición media de la estación se
calcula y se aplica la deriva magnética si no se especifica anteriormente en loadrdi.m
getbtrack.m. Controla los datos de BT de RDI y realiza un cálculo alternativo basado en datos
de ‘water-track’. Se puede seleccionar cuál queremos usar, aunque se almacenan ambos para
diagnósticos a posteriori
loadctdprof.m. Es un archivo local que carga los datos procesados de CTD para el cálculo de
la velocidad del sonido y de la estratificación. En nuestro caso tenemos un archivo que lee
los datos de matlab, que es loadctdprofieo.m. Para usarlo tenemos que configurar f.ieo = 1.
loadctd.m. fichero local para cargar la serie temporal de CTD. Posteriormente calcula la w_ctd
a partir de dz/dt y la compara con la w del ADCP. Basados en la comparación de las series de
ambas w, en esta nueva versión se realizan varios tests diferentes para determinar cuál es el
mejor ‘lag’ entre ambos perfiles. Esta elección se justifica si los datos de navegación vienen a
partir de la serie de NMEA integrados y sincronizados con los datos de CTD (en el cnv). Si
la navegación es externa, sería preferible ajustar los tiempos del CTD.
getdepthi.m. Calcula la profundidad a partir de la distancia estimada por el BT y por la serie
temporal de ADCP, bien basada en la integración temporal de w, o preferiblemente a partir de
la serie temporal de presión del CTD.
En este punto se presentan algunos plots de los voltajes, para posteriormente llamar a la
segunda tanda de procesados incluidos en PRESOLVE.m.
1-
prepinv.m.
Condensa los datos ‘raw’ en un número reducido de ‘super-ensembles’, que
elegimos para recopilar todos los datos en intervalos de 10 m. Antes de promediar ambos
registros de velocidad (MASTER/SLAVE) tienen que rotarse sobre una base común (la
alineación promedio de ambos instrumentos).
2- loadsadcp.m. Carga los datos de sadcp si los hubiera
3- lanarrow.m. Es un conjundo de órdenes para ontener una primeria estimativa de la solución y
eliminar el 1% de los datos más inconsistentes.
4- Se vuelve a llamar a prepinv.m para re-ajustar los datos de ambos instrumentos. Primero se
realiza una primer estimativa de el perfil de velocidades, la cual se substrae de cada ensemble
‘raw’. Nos queda nbin realizaciones de U_ctd, las cuales deberían ser idénticas para ambos
instrumentos y para cada bin. También se elimina el offset medio, lo cual debe reducir el
desfase entre los dos instrumentos, el cual es interpretable como errores en la
brújula/inclinómetro. Posteriormente se recalculan las super-ensembles.
En este punto los datos están cargados, controlados y preparados para los pasos de
procesamiento finales agrupados en RESOLVE.m.
establece y resuelve la inversión. En esta versión 8 se incluyen un número de
cambios en relación con la ponderación de las diversas constraints. Se produce una tabla con
la fuerza relativa de cada una de las constraints posibles.
2- checkinv.m: realiza las gráficas de la contribución relativa de cada una de las dos soluciones
(U_ocean y U_ctd). Listado de la certidumbre y la diferencia real entre la constraint y la
solución
1-
getinv.m:
Manual LADCP IEO
345678-
checkbtrk.m:
evalúa las diferencias entre los datos de BT de RDI y aquéllos derivados a partir
del water-track
getshear2.m: lleva a cabo la solución clásica basada en la integración del shear vertical y hace
conincidir la media vertical del perfil con la velocidad obtenida a partir de la solución
inversa.
getkxprof.m: es una implementación experimental del método de Polzin-Gregg-Haney para
computar las difusividades verticales a partir del espectro de cizallas de las ondas internas.
Este método no está completamente validado, siendo por tanto ‘experimental’.
battery.m: proporciona el ‘mejor estimador’ del voltaje de las baterías. Se permiten
calibraciones específicas para cada instrumento.
savearch.m: proporciona las salidas en formato mat, ASCII y NetCDF.
saveprot.m: guarda algunas de las informaciones más determinantes usadas durante el
procesamiento.
El ladcpbatch.m finaliza con la llamada a cruise.m, que lee todos los ficheros NetCDF
individuales y genera un único NetCDF para toda la campaña, así como una serie de ficheros
índices en html y una tabla para la rápida visualización de los resultados.
Se recomienda guardar 13 figuras para cada cast: (Figs 1-10, 12,13). A continuación se detalla el
contenido de cada una de ellas:
1- Perfil principal de velocidades junto con otras gráficas adicionales: velocidad de error,
alcance, intensidad del blanco y posición del CTD.
2- Plot de datos ‘raw’ La v8 ya puede presentar los voltajes correctos y puede computar rangos
para cada beam.
Manual LADCP IEO
3- Resultados detallados de la inversión: el panel izquierdo presenta la velocidad en función de
los bins y la velocidad de la super-ensemble. Este plot debería dar un ruido blanco, junto con
el rms del error de la super-ensemble. Cualquier tipo de organización o estructura en estas
figuras sugiere una mala inversión. Los plots de los paneles centrales presentan la estimación
de la velocidad (a color) en la super-ensemble en función de la profundidad y tiempo. El
fondo detectado se ilustra como puntos negros. Este plot debería propocionar franjas
horizontales de un solo color. Si vemos franjas verticales también indican una mala inversión
(inclinación, brújula, BT). El panel de la derecha es similar al central, excepto que plotea un
punto por cada bin individual de velocidades (negro SLAVE, azul MASTER). La línea verde
da una estimación de la incertidumbre. La roja son los resultados a partir de la inversión
mientras que la negra da los resultados a partir del perfil de cizallas (si estuviera disponible).
4- El panel superior es el inicio/fin del cast en coordenadas de tiempo/profundidad. Los puntos
azules representan la detección de la superficie. El panel central es la parte inferior de cast,
cerca del fondo. Una línea negra es la integral temporal de w, la roja es la mejor estimativa de
z(t) (si tenemos la profundidad a partir del CTD), y los puntos azules es la distancia al fondo.
La línea negra es la mejor estimación del fondo en el punto más profundo del CTD. El panel
inferior muestra la profundidad del CTD en función del tiempo si disponemos de presión a
partir del CTD. El panel inferior derecho muestra una muestra de la serie de w después de
realizar los ajustes entre las series de CTD y ADCP.
5- Diferencia entre las brújulas de ambos instrumentos. La línea superior es el ‘ajuste’ aplicado.
El panel central es la diferencia entre ambos. El panel inferior da la rotación necesaria para la
concordancia óptima entre las velocidades de referencia de ambos instrumentos.
6- Diferencia entre heading, pitch y roll entre los MASTER/SLAVE, en función de los
parámetros del MASTER.
Manual LADCP IEO
7- Los paneles superiores dan las series temporales de U_ctd, U_ocean en función de la
profundidad del CTD y U_ship a partir de la navegación del barco. Si ps.dragfac > 0 se indica
la U_ctd esperada a partir del modelo de arrastre con una línea roja. El panel central izquierdo
indica la distancia horizontal entre el CTD y el barco. El panel central derecho indica la w del
CTD. El panel inferior muestra la posición del CTD y el barco en relación a la posición de
comienzo de la estación.
8- Perfil de la difusividad vertical (experimental)
9- Panel superior: perfiles sadcp en la estación. Panel inferior: posición del barco donde existe
datos de sadcp.
10- Panel superior: offset medio aplicado a la U para reducir la diferencia entre
MASTER/SLAVE. Panel central: idem para V. Panel inferior: error de inclinación implícito si
la diferencia fuese debida apenas a una falsa proyección de w en la componente u/v.
Manual LADCP IEO
11- Resumen de los errores/avisos surgidos durante el procesamiento. Para guiar al operador
acerca de problemas potenciales (no mostrada).
12- Factores de ponderación empleados en la inversión. Panel superior: peso para constreñir
U_ocean. Panel inferior: peso para constreñir U_ctd. Interesa ver principalmente datos de
velocidad y apenas algunas constraints determinadas.
13- Efectividad del BT. Panel superior izquierdo: u. Los putos negros representan U_adcp y U_ctd a
partir de la solución para perfiles donde existen datos de BT. Los puntos rojos marcan el
alcance de cada bin que se usó para el cálculo de los datos de water-track. Histrograma verde
U_brk_RDI-U_ctd. Panel central: idem para el BT a partir de pings de agua (algoritmo propio).
Panel inferior: datos de BT para la super-ensemble (puede ser bien a partir del algoritmo
propio o a partir del de RDI [por defecto]). Panel superior derecho: idem que el superior
izquierdo pero para la componente v. Panel inferior izquierdo: idem que el superior izquierdo
pero para la componente w. Panel inferior derecho: abs(w) normalizada por w de la capa de
referencia, lo cual muestra el bias en los bins bajo la superficie debido al mayor ángulo de
haz esperado, para los centros de los haces procedentes del fondo.
Manual LADCP IEO
Procesamiento con LADCP-Visbeck
Hasta la fecha hemos procesado los datos de LADCP-IEO con el paquete de Visbeck. Dado
el carácter beta y la continua evolución de estas distribuciones hemos desarrollado un importante
esfuerzo para compatibilizar e integrar los programas de Visbeck a nuestros formatos, así como para
automatizar el procesamiento con un mínimo de atención por parte del operador.
El procesamiento requiere unos ficheros de entrada y unos formatos establecidos.
Necesitamos:
cast###d.000
cast###u.000
cast###.mat
cast###.cnv
% Ping files, MASTER
% Ping files, SLAVE
% CTD files, formato *.mat
% CTD files, datos NMEA (navegación)
Este último es generado por SBE-DataProcessing-win32. Tiene el siguiente formato:
* Sea-Bird SBE 9 Data File:
* FileName = C:\RadProf0206\CTD\Datos\Raw\Sbe911_0726\cast007.dat
* Software Version Seasave Win32 V 5.22
* Temperature SN = 4641
* Conductivity SN = 3148
* Number of Bytes Per Scan = 37
* Number of Voltage Words = 4
* Number of Scans Averaged by the Deck Unit = 1
* System UpLoad Time = Feb 05 2006 17:26:53
* NMEA Latitude = 42 59.99 N
* NMEA Longitude = 009 43.10 W
* NMEA UTC (Time) = Feb 05 2006 17:26:53
* Store Lat/Lon Data = Append to Every Scan
** Ship:
Cornide de Saavedra
Manual LADCP IEO
** Cruise:
RadProf0206
** Station: 008
** Cast: 007
** Latitude:
43 00.00 N
** Longitude: 009 43.00 W
** Depth: 2232
** Date: 05/02/06
** Time: 17:23
# nquan = 10
# nvalues = 4764
# units = specified
# name 0 = scan: Scan Count
# name 1 = t068C: Temperature [ITS-68, deg C]
# name 2 = c0S/m: Conductivity [S/m]
# name 3 = prDM: Pressure, Digiquartz [db]
# name 4 = latitude: Latitude [deg]
# name 5 = longitude: Longitude [deg]
# name 6 = timeJ: Time, Elapsed [julian days]
# name 7 = sal00: Salinity [PSU]
# name 8 = potemp068C: Potential Temperature [ITS-68, deg C]
[.
.
.]
*END*
13
37
61
13.3328
13.3324
13.3327
4.227810
4.227776
4.227808
3.649
3.937
3.995
42.99984
42.99996
42.99996
-9.71833
-9.71840
-9.71840
36.727008
36.727019
36.727031
35.9418
35.9418
35.9417
13.3323 0.0000e+00
13.3318 0.0000e+00
13.3321 0.0000e+00
Actualmente empleamos la última versión disponible del software (versión 8b), a la cual le
hemos realizado varias modificaciones, algunas importantes. Para que el paquete funcione tenemos
que copiar los siguientes directorios y ficheros al directorio de trabajo donde estemos haciendo el
procesamiento 9 :
./loaddata
loadnav.m
loadctd.m
loadctdprof_ieo.m
Si además hubiese datos de sadcp, incluir el fichero correspondiente:
./loaddata
loadsadcp.m
El script que realiza el proceso por lotes se encuentra:
./batchprocess
ladcpbatch.m
Este fichero está bien documentado. En él debemos modificar las rutas de acceso a los datos,
las etiquetas de cada campaña y otros parámetros necesarios para afinar el procesado. El fichero
tiene la siguiente forma:
%
%
%
%
ladcpbatch.m
LADCP PROCESSING SOFTWARE
Martin Visbeck, LDEO, 2004
batch processing sample command file
cc
% Path donde se encuentra el paquete de procesamiento de LADCP
p1='F:\Documents and Settings\rleal\Mis documentos\ladcp\IFREMER\matlab\ladcp_visbeck_v7\m';
p11='F:\Documents and Settings\rleal\Mis documentos\ladcp\IFREMER\matlab\ladcp_visbeck_v7\m\otros';
addpath(p1)
addpath(p11)
% Path donde se encuentran los archivos para cargar los datos (especificos para cada campaña)
p2='F:\Documents and Settings\rleal\Mis documentos\VACLAN\RadProf0206\LADCP\mlocal\loaddata';
addpath(p2)
% Cruiseid
cruiseid='RadProf0206';
% output files preface
fresult='../process/cast';
% preface and postface for CTD time series: Ruta (y extension) donde se encuentran los cnv
fctdpre='F:\Documents and Settings\rleal\Mis documentos\VACLAN\RadProf0206\CTD\Datos\Cnv_LADCP\cast';
fctdpost='.cnv';
% Ruta donde se encuentran los ficheros de LADCP, con prefijo
fladcpdir='F:\Documents and Settings\rleal\Mis documentos\VACLAN\RadProf0206\LADCP\datos\cast';
9
Estos ficheros están hechos para tratar específicamente con los formatos de salida de datos de CTD que actualmente
empleamos en el IEO.
Manual LADCP IEO
% Ruta (y extension) donde se encuentran los perfiles (mat)
fctdprof='F:\Documents and Settings\rleal\Mis Documentos\VACLAN\RadProf0206\CTD\Datos\Mat\NoCalibrados\cast';
fctdmatpost='.mat';
% SADCP cruise file, si hubiese datos de doppler de casco
fsadcp=' ';
% which plots to save
saveplot=[1:10];
% number of digits for station number
ndigits=3;
% force rerun even if processed before
overwrite=1;
% Output resolution: every pdz meters
pdz=16;
save batch
tic
clear
% Casts a procesar
vals=[1 2 3 4 5 6 8 12 13 14 15 16 17 18 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50];
for Prof = 1:length(vals)
prof=vals(Prof);
clearallbut('prof','vals')
load batch
close all
proftxt = num3str(prof,ndigits,0,'0');
disp('')
disp(['Profile ' proftxt]);
% file names: output files
f.res=[fresult proftxt];
if overwrite | ~exist([f.res '.nc'])
try
% ctd file to read depth from SEABIRD CTD file
% f.ctd=' '; % uses W to obtain ADCP depth
f.ctd=[fctdpre proftxt fctdpost];
% nav file with continous navigation data
f.nav=f.ctd;
% RDI raw data files
f = getfile([fladcpdir proftxt], f);
% set to f.ladcpup=' '; if only down looking instrument is used results written to this base filename (without extension)
% CTD profile
f.ctdprof = [fctdprof proftxt fctdmatpost];
f.sadcp=fsadcp;
% parameter: station name
p.name=[cruiseid '-' proftxt];
p.cruise_id = cruiseid;
p.ladcp_station=prof;
p.saveplot = saveplot; % (Which figures to save)
% special handling of "dubious profile"
if 0
switch prof
case 1
f.ladcpdo=f.ladcpup;
f.ladcpup=' ';
case 3
f.ladcpdo=f.ladcpup;
f.ladcpup=' ';
otherwise
end
end
% set output resolution
ps.dz=pdz;
% pre average the data to dz of p.dz
p.avdz=ps.dz;
% Para las estaciones dificiles, seleccionar aqui los parametros...
sta_peq=[1 2 3 4 31 32 33 34 35 36 37 46 47 48 49];
if (prof <=4 | (prof >=31&prof<=37) | (prof >=49&prof<=49))
p.cut=5;
else
p.cut=15;
end
if prof==21
% Añadir un offset al tiempo
p.timoff=datenum(2006,02,08,20,54,08)-datenum(1994,01,01,17,56,43);
end
p.pglim=90.0;
p.elim=0.1;
p.wlim=0.08;
p.weighbin1=0.5;
p.vlim=2.5;
p.zpar=[5 nan 5];
f.ieo=1;
if prof <=18
p.btrk_mode=2; %1: RDI; 2: OWN; 3: RDI or OWN if not; 0: no bottom track
else
p.btrk_mode=3; %1: RDI; 2: OWN; 3: RDI or OWN if not; 0: no bottom track
Manual LADCP IEO
%
end
p.ctddepth=1;
p.ctdtime=1;
ps.botfac=0 (tenemos =1)
p.btrk_range=200;
p.btrk_ts=3;
laproc
catch
disp(['PROBLEM WITH PROFILE ' proftxt ': ' lasterr char(10)])
fid = fopen([mfilename '.err'], 'a');
fprintf(fid, ['PROBLEM WITH PROFILE ' proftxt ': ' lasterr char(10)]);
end
end
end
compile_all
De una forma general procedemos al tratamiento de todos los datos con el máximo de
información posible, lo que llamamos el ‘tratamiento estándar’. Una vez detectados los posibles
problemas podemos jugar con los parámetros disponibles (editar default.m para ver las opciones)
Problemas típicos: En algunas estaciones la detección del fondo es complicada, o la
velocidad referenciada a él es malinterpretada. Otro error común es la malinterpretación de las
profundidades a partir de la integración de la w del doppler. Uno de los ficheros integrantes del
paquete (loadctd.m) calcula la profundidad máxima a partir del calculo del bestlag entre la integral de
la velocidad vertical (w) del doppler y del CTD. En estaciones donde el backscatter es débil se
malinterpreta la profundidad máxima y se introduce una gran confusión. Para evitar esto se ha
omitido el cálculo del bestlag.m, de forma que la profundidad máxima viene siempre impuesta por el
CTD. Es equivalente a especificar p.zpar = [4 ProfMax 4] en lugar de p.zpar = [4 NaN 4];
El paquete de Visbeck aplica un algoritmo propio para mejorar la detección del fondo en caso
que no exista BT de RDI. Permite jugar con el rango (p.btrk_range) y/o el umbral de detección del
ping reflejado por el fondo (p.btrk_ts). Una modificación que hemos añadido es variar en getdepthi.m
el valor de 200 a 100 m para eliminar las reflexiones en la superficie. De momento esto se hace
manualmente; más adelante se introducirá un p.getdepthi_threshold.
Para estaciones difíciles puede ser necesario aplicar una serie de condicionantes más severos.
Parece que algunos parámetros importantes para esto son:
f.ladcpup = ’ ‘;
p.cut = ’ ‘; p.cut = 15
p.btrk_mode = 0,1,2;
p.barofac = 0;
% No empleamos los datos del SLAVE
% Despreciar valores cerca de la superficie; puede haber errores
% sobre todo en el SLAVE.
% Se puede inicializar esta variable a 0 para no considerar los
% datos cercanos al fondo. Con 3 se aplica el algoritmo de
% Visbeck y con p.btrk_range=50 apenas se usan los datos
% hasta 50 m de distancia del fondo, así como jugar con la
% detección del mismo con p.btrk_ts.
% Se puede inicializar esta variable a 0 para suprimir la
constante barotrópica en caso de existir algún error notable en
la navegación.
Los parámetros de detección del fondo son importantes en el caso de una batimetría
fuertemente variable. El test con p.btrk_mode = 0 permite evaluar el efecto de utilizar o no el BT. En
cualquier caso es preferible utilizar el algoritmo de Visbeck para detectar el fondo jugando con el
rango y el threshold, mejor que eliminar la constraint del BT en la inversión. Este algoritmo estima
las amplitudes de cada uno de los beams y localiza los ecos correspondientes al fondo. Parece ser
que el BT de RDI es más exacto que el algoritmo de Visbeck, aunque esta manifestación no es
concluyente (B. King).
Manual LADCP IEO
Frecuentemente durante el procesamiento observamos velocidades excesivamente elevadas
en las capas profundas, cerca del fondo (Figura 11). Esto es producto de la falta de ecos de calidad
en aguas limpias, y la constraint de las velocidades de BT puede dar shears totalmente artificiales.
En estos casos conviene desactivar la condición de las velocidades BT (botfac = 0) para estimar las
diferencias.
Figura 11. Procesamiento para el cast022 de la RadProf0206. Observamos velocidades realistas cerca del fondo (RDI BT) pero velocidades anómalas,
así como una velocidad de error elevada (>0.5 m/s) en el resto de la columna.
ANEXO I
SCR files.
MASTER.scr
$P *************************************************************************
$P ******************* LADCP Master. Usually looking down ****************
$P *************************************************************************
; Send ADCP a BREAK
$B
; Wait for command prompt (sent after each command)
$W62
;**Start**
; Display SYSTEM parameters
PS0
$W62
; Display SYSTEM configuration
OL
$W62
; Display real time clock setting
tt?
$W62
; Set to factory defaults
CR1
$W62
; Save settings as User defaults
CK
$W62
; Name data file
RN MVA06.
$W62
; Set transducer depth to zero
ED0000
$W62
Manual LADCP IEO
; Set salinity to 35ppt
ES35
$W62
;Set system coordinate.
EX11111
$W62
; SET AS MASTER ADCP
SM1
$W62
; TRANSMITS SYNCHRONIZING PULSE BEFORE EACH WATER PING
SA001
$W62
; SYNCHRONIZING PULSE SENT ON EVERY PING
SI0
$W62
; WAIT 75 MILLISECONDS or 500 MILLISECONDS (Choose only one command)
SW75 ;or SW500
$W62
; Set one ensemble/sec
TE00:00:01.00
$W62
; Set one second between pings
TP00:01.00
$W62
; Set LADCP to output Velocity, Correlations, Amplitude, and Percent Good
LD111100000
$W62
; Set one ping per ensemble. Use WP if LADCP option is not enabled.
LP1
$W62
; Set to record 20 bins. Use WN if LADCP option is not enabled.
LN020
$W62
; Set bin size to 1000 cm. Use WS if LADCP option is not enabled.
LS1000
$W62
; Set blank to 176 cm (default value) Use WF if LADCP option is not enabled.
LF0176
$W62
; Set max radial (along the axis of the beam) water velocity to 170 cm/sec. ; Use WV if LADCP option is not enabled.
LV170
$W62
; Set ADCP to narrow bandwidth and extend range by 10%
LW1
$W62
; Set amplitude and correlation thresholds (defaults: 030 correlation magnitude, 220 counts treshold)
LZ30,220
$W62
; Set to use a fixed speed of the sound
EZ0111111
$W62
; Set speed of sound value. 1500 m/sec is default.
EC1500
$W62
; Heading alignment set to 0 degrees
EA00000
$W62
; Heading bias set to 0 degrees
EB00000
$W62
; Record data internally
CF11101
$W62
; Save set up
CK
$W62
; Display ALL settings
LN?
LP?
LS?
LV?
LZ?
TE?
TF?
TP?
TS?
EA?
EB?
ED?
ES?
EX?
EZ?
CF?
CK?
CR?
CB?
CP?
RR?
RF?
$W62
; Start pinging
CS
; Delay 3 seconds
$D3
$p *************************************************************************
$P Please disconnect the ADCP from the computer.
$P *************************************************************************
; Exit BBTalk
$X
SLAVE.scr
Manual LADCP IEO
$P *************************************************************************
$P ******************* LADCP SLAVE. Usually looking up ********************
$P *************************************************************************
; Send ADCP a BREAK
$B
; Wait for command prompt (sent after each command)
$W62
;**Start**
; Display SYSTEM parameters
PS0
$W62
; Display SYSTEM configuration
OL
$W62
; Display real time clock setting
tt?
$W62
; Set to factory defaults
CR1
$W62
; Save settings as User defaults
CK
$W62
; Name data file
RN SVA06.
$W62
; Set transducer depth to zero
ED0000
$W62
; Set salinity to 35ppt
ES35
$W62
;Set system coordinate.
EX11111
$W62
; SET AS SLAVE ADCP
SM2
$W62
; LISTEN FOR SYNCHORINZING PULSE BEFORE EACH PING
SA001
$W62
; Wait up to 300s for FOR SYNCHORINZING PULSE
ST0300
$W62
; Set one ensemble/sec
TE00:00:01.00
$W62
; Set one second between pings
TP00:01.00
$W62
; Set LADCP to output Velocity, Correlations, Amplitude, and Percent Good
LD111100000
$W62
; Set one ping per ensemble. Use WP if LADCP option is not enabled.
LP1
$W62
; Set to record 20 bins. Use WN if LADCP option is not enabled.
LN020
$W62
; Set bin size to 1000 cm. Use WS if LADCP option is not enabled.
LS1000
$W62
; Set blank to 176 cm (default value) Use WF if LADCP option is not enabled.
LF0176
$W62
; Set max radial (along the axis of the beam) water velocity to 170 cm/sec. ; Use WV if LADCP option is not enabled.
LV170
$W62
; Set ADCP to narrow bandwidth and extend range by 10%
LW1
$W62
; Set amplitude and correlation thresholds (defaults: 030 correlation magnitude, 220 counts treshold)
LZ30,220
$W62
; Set to use a fixed speed of the sound
EZ0111111
$W62
; Set speed of sound value. 1500 m/sec is default.
EC1500
$W62
; Heading alignment set to 0 degrees
EA00000
$W62
; Heading bias set to 0 degrees
EB00000
$W62
; Record data internally
CF11101
$W62
; Save set up
CK
$W62
; Display ALL settings
LN?
LP?
LS?
LV?
LZ?
TE?
TF?
TP?
TS?
EA?
EB?
Manual LADCP IEO
ED?
ES?
EX?
EZ?
CF?
CK?
CR?
CB?
CP?
RR?
RF?
$W62
; Start pinging
CS
; Delay 3 seconds
$D3
$p *************************************************************************
$P Please disconnect the ADCP from the computer.
$P *************************************************************************
; Exit BBTalk
$X
LADCP log sheet: -VACLAN06
Nº Cast:
Fecha/hora:
Long:
Lat:
Sonda:
P. Max:
Hoja de registros LADCP
Antes de comenzar la adquisicion de datos (conectar cables)
En BBTalk:
1.
Nombre del archivo de registro (<F3>)
2.
Time check (TS?<ENTER>),
y correcion horaria si es necesario
3.
Memoria libre (RS?<ENTER>);
Mb
(borrar si es necesario, RE ErAsE<ENTER>)
4.
Pre-deployment tests (PA<ENTER>)
5.
Voltaje baterias (los 2 pines opuestos del dado)
MASTER
SLAVE
M.txt
:
S.txt
:
:
:
Mb
V
V
Puesta en marcha/adquisicion
En BBTalk:
6.
Hora de inicio/adquisición
MASTER
:
SLAVE
:
:
:
Parada/recuperacion de datos
En BBTalk:
7.
Hora de parada
8.
Voltaje baterias
MASTER
:
SLAVE
:
:
:
V
V
Transferencia de datos
En BBTalk:
9.
MASTER
SLAVE
Numero de estaciones
10. Nombre de archivo (default)
11. Archivo renombrado
12. Tamano de archivo
13. Numero de ensembles
MLADCP
.000
SLADCP
d.000
.000
u.000
kb
kb
LADCP log sheet: -VACLAN06
14. Comentarios