Cap´ıtulo 2 Representación digital de la información
Anuncio

Capı́tulo 2
Representación digital de
la información
2.1
2.2
2.3
2.4
2.5
Conceptos previos . . . . . . . . .
Representación digital de los datos
Códigos redundantes . . . . . . . .
Ejercicios . . . . . . . . . . . . . .
Comentarios bibliográficos . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
29
35
49
55
57
La representación de la información en los computadores digitales
persigue dos objetivos: en primer lugar, procesarla, permitiendo su manipulación eficiente, para lo cual se han ideado diferentes convenios, de
los que veremos los más importantes; y en segundo, asegurarla contra
errores durante su almacenamiento o durante las transmisiones, lo que
se consigue incorporando en la codificación el empleo de la redundancia
para detectar y corregir dichos errores.
2.1
2.1.1
Conceptos previos
Información analógica y digital
Las magnitudes continuas son las que pueden adoptar los infinitos
valores de un intervalo de números reales, tales como la longitud de un
segmento, velocidad, temperatura, intensidad de un sonido, etc.
30
Capı́tulo 2. Representación de la información
Las magnitudes discretas tienen naturaleza discontinua, tales como
la longitud (número de sı́labas) de una palabra, capacidad (número de
pasajeros) de un vehı́culo, etc.
En la práctica, es frecuente que las magnitudes continuas sean tratadas como discretas: el peso de una persona (que se redondea en kilos); la
temperatura (en grados y décimas de grado); la longitud de un segmento,
medida con un dispositivo de precisión hasta los milı́metros.
En relación con ambos tipos de magnitud se considera la información
analógica, que es de naturaleza continua, pudiendo tomar infinitos valores; y la información digital, que es de naturaleza discreta. Aunque esta
última puede tomar infinitos valores ( IN), en un computador digital la
información es discreta y, además, finita.
En las calculadoras, la digitalización de variables analógicas produce
un efecto de redondeo, que debe ser tenido en cuenta y tratado convenientemente para evitar errores de cálculo (véase la sección 2.3); en
el monitor de un ordenador, supone el ajuste de la imagen proyectada
sobre una matriz de puntos.
2.1.2
Unidades de información en los sistemas digitales
La razón de ser de un computador es el procesamiento de información. Para poder hablar con propiedad de este procesamiento, debemos definir unidades de medida que nos permitan cuantificar de algún
modo la acción del computador sobre la información suministrada. Consideramos las siguientes:
• Bit (BInary digiT ) es la cantidad de información que puede almacenarse en una variable binaria. No hay que confundir el bit con
la variable ni con su valor: una variable binaria es la que puede
tomar dos valores estables: 0 ó 1, blanco o negro, sı́ o no, etc.
La necesidad de codificar informaciones más complejas ha llevado
a agrupar varios bits, apareciendo ası́ las siguientes unidades:
• El byte u octeto es la cantidad de información que puede codificarse
en 8 bits; representa por tanto 28 = 256 valores.
2.1. Conceptos previos
31
• La palabra se define en relación con la máquina considerada, como
la cantidad de información que la máquina puede manejar de una
sola vez. Para evitar equı́vocos, se habla de palabras de 8 bits, 16
bits, 32 bits, etc.
• 1 Kbyte = 210 bytes = 1.024 bytes. Se suele llamar kilobyte, aunque esto puede resultar equı́voco, ya que el prefijo “kilo” significa
1.000 (y no 1.024).
• 1 Mbyte = 1.048.576 bytes (220 = 1.0242 ). Análogamente, debe
advertirse que “mega” no significa un millón en este contexto.
2.1.3
Sistemas de numeración posicionales
Aunque se conocen sistemas no posicionales, tales como el de numeración romana o el sexagesimal, que usamos para medir el tiempo y los
ángulos, el sistema de numeración más difundido en la actualidad es sin
duda el sistema decimal posicional, o sistema arábigo-hindú, inventado
hacia el siglo VIII.
Por otra parte, en el contexto de la informática se usan frecuentemente sistemas de numeración posicional en bases tales como 2 (ya que
el bit tiene dos posiciones), 16 (como compactación de palabras de 4
bits), etc.
Para aprender a manejarlos, se recurre frecuentemente a la analogı́a
con el sistema de numeración más conocido: el de base 10. Se llama
decimal porque cada cifra o dı́gito puede tomar diez posibles valores: del
0 al 9; se llama posicional porque el valor real de cada dı́gito depende
de su posición.
10475 = 1 ∗ 104 + 0 ∗ 103 + 4 ∗ 102 + 7 ∗ 101 + 5 ∗ 100
A la cantidad 10 se le llama base; las potencias de 10 son los pesos
asociados a cada posición, y los factores o coeficientes de cada peso son
las cifras de la representación. También se podrı́a haber representado
en forma polinómica del siguiente modo:
10475 = 1 ∗ 104 + 0 ∗ 103 + 47 ∗ 101 + 5 ∗ 100
32
Capı́tulo 2. Representación de la información
pero la primera forma es la única donde las cifras son todas menores
que la base. En general, esta afirmación adopta la siguiente forma, cuya
demostración se incluye al final de este capı́tulo.
Teorema 2.1 En un sistema de numeración en base b > 1, todo entero
N positivo tiene una única representación de la forma
N = cp bp + cp−1 bp−1 + . . . + c1 b1 + c0 b0
donde 0 ≤ ci < b para todo i = 0, 1, . . . , p
Conversión entre sistemas
En primer lugar, la expresión decimal de un número de cifras cp . . . c0
en base b se obtiene sencillamente sumando los valores reales correspondientes a los diferentes dı́gitos:
[cp . . . c0 ](b = cp ∗ bp + . . . + c0 ∗ b0
Por ejemplo, 275(8 = 2 ∗ 82 + 7 ∗ 81 + 5 ∗ 80 = 189(10
En segundo lugar, representar el número 241(10 en el sistema de base
5, equivale a expresarlo en forma polinómica con las sucesivas potencias
de esa base, siguiendo la idea de la demostración del teorema:
241
5
1
48
5
3
9
4
⇒
241
=
48 * 5 + 1
⇒
48
=
9*5+3
5
⇒
9
=
1*5+4
1
⇒
1
=
0*5+1
Por lo tanto,
241
=
48
∗5+1
=
(9 ∗ 5 + 3)
∗5+1
=
((1 ∗ 5 + 4) ∗ 5 + 3)
∗5+1
=
1 ∗ 53 + 4 ∗ 52 + 3 ∗ 51 + 1 ∗ 50
= 1431(5
33
2.1. Conceptos previos
Sistemas de numeración más usuales
El sistema más empleado en electrónica digital es el de base 2, llamado binario (natural). En informática tienen interés los sistemas cuya
base es una potencia de dos: 2, 4, 8, 16. La siguiente tabla recoge los
primeros números naturales, expresados en algunos de esos sistemas y
en el decimal:
dec.
binario
octal
hexad.
dec.
binario
octal
hexad.
0
1
2
3
4
5
6
7
8
0
1
10
11
100
101
110
111
1000
0
1
2
3
4
5
6
7
10
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
1001
1010
1011
1100
1101
1110
1111
10000
10001
11
12
13
14
15
16
17
20
21
9
A
B
C
D
E
F
10
11
En el sistema hexadecimal se usan los dı́gitos 0, . . . , 9, A, . . . F para las
cantidades cero, . . . , nueve, diez, . . . , quince respectivamente. Ası́ por
ejemplo, C7A(16 = 12 ∗ 162 + 7 ∗ 161 + 10 ∗ 160 = 3194(10 , ya que los
valores de A y C en el sistema de base 16 son 10 y 12, respectivamente.
Se observa que, en una base cualquiera b, con N cifras (o menos)
es posible expresar bN cantidades distintas; inversamente, para poder
componer C combinaciones distintas se necesita disponer de un número
de cifras igual a logb C, redondeado por exceso.
Como consecuencia de lo anterior, cuanto mayor sea la base adoptada
se pueden expresar más cantidades (combinaciones) para un número fijo
de cifras; inversamente, cuanto mayor sea la base, es posible usar menos
cifras para expresar una misma cantidad.
34
Capı́tulo 2. Representación de la información
Observación
La conversión de binario en octal o en hexadecimal se puede abreviar
del siguiente modo:
11 001 111 010 101 100(2
= 11 001 111 010 101 100
= 3
1
7
2
5
4 = 317254(8
= 1 1001 1110 1010 1100
= 1
9
14
10
12
= 19EAC(16
¿A qué se debe el funcionamiento de este mecanismo?
Operaciones aritméticas en base dos
Para las operaciones elementales se usan las tablas correspondientes
a la base de que se trate. Por ejemplo, para el caso binario la tabla de
sumar es la siguiente:
+ 0
1
0 0
1
1 1 10
Y entonces, son válidas las reglas conocidas para las operaciones en base
diez. Por ejemplo, en el sistema binario natural, tenemos:
+
1001
1011
10100
−
100101
11011
01010
Para la resta se usa frecuentemente el método del complemento: en
lugar de la resta propuesta, se halla la suma correspondiente complementando el sustraendo (min − sus → min + comp(sus), siendo el complemento (comp) el número resultante de cambiar cada cero por un uno
y viceversa), suprimiendo la cifra excedente, posiblemente aparecida por
el arrastre, y sumando una unidad al resultado obtenido:
−
100101
11011
→
+
100101
100100
1001001
→
001010
2.2. Representación digital de los datos
2.2
35
Representación digital de los datos
En los sistemas digitales, no resulta viable dar una representación
válida para codificar todos los números; por otra parte, los diversos
sistemas empleados dan diferentes tratamientos a números tan usuales
como el uno (según se considere como real o como entero). Estudiaremos
diversos convenios para diferentes conjuntos de números, ası́ como sus
limitaciones.
En este apartado, supondremos que disponemos de un espacio de N
bits, con lo que es posible representar 2N enteros distintos.
2.2.1
Representación de los números enteros
Números enteros positivos
Si se considera únicamente números enteros positivos, con N bits de
espacio serı́a posible representar los números de 0 a 2N −1. La forma más
natural de lograrlo consiste en interpretar cada combinación mediante
la cantidad que representa en binario. Por ejemplo, con 1 byte (es decir,
N = 8) se representarı́an los números 0, . . . , 255 en este sistema.
Números enteros con signo. Convenio del signo-magnitud
Para representar los números enteros (con signo), el sistema más
simple es el convenio de signo-magnitud, consistente en reservar el primer dı́gito binario para codificar el signo (suele representarse el signo
+ con un cero y el − con un uno) y los siguientes N − 1 para el valor absoluto. Ası́, en este sistema tienen representación las cantidades
±0, . . . , ±(2N − 1). En el caso particular de 1 byte, esas cantidades son
−127, . . . , −0, +0, . . . , +127.
En este sistema, la aritmética es bastante simple: la suma de cantidades del mismo signo y la resta de cantidades de distinto signo siguen
la regla básica en binario. Para sumar cantidades de distinto signo, o
restar cantidades del mismo signo, resulta más práctico el método del
complemento.
36
Capı́tulo 2. Representación de la información
Se observa el inconveniente de que el cero tiene una doble representación, por lo que el test de la comparación para la igualdad en este
sistema debe tenerlo en cuenta. Por otra parte, la suma/resta de signos
y valores absolutos necesita dos algoritmos distintos, que no resultan
muy eficientes. Los siguientes sistemas surgen precisamente para tratar
de paliar estas deficiencias.
Números enteros con signo. Complemento restringido
Para comprender mejor el funcionamiento de este convenio en binario, conviene introducirlo primero en base diez. Si consideramos palabras
de N = 2 dı́gitos (decimales), es posible representar 102 = 100 cantidades distintas. En este convenio se opta por considerar los números
negativos de {−49, . . . , −0}, y los positivos de {0, . . . , 49}, del siguiente
modo: los números positivos se representan en decimal natural, mientras
que para cada negativo −z se toma la cantidad 99 − z (complemento de
z respecto de 102 − 1, que es la N=2 potencia de la base menos uno).
Ası́ por ejemplo, tenemos:
2
repr(29) =
repr(−29) = 99 − 29 =
9
7
0
Con este convenio, las cantidades
−49, −48, . . . , −0, 0, 1, . . . , 48, 49
se representan respectivamente mediante
5 0 , 5 1 , ... , 9 9 , 0 0 , 0 1 , ... , 4 8 , 4 9
Aunque se observa el inconveniente de que el cero tiene dos representaciones, la ventaja de este convenio consiste en que la suma de dos
números, sea cual fuere su signo, se lleva a cabo con un mismo algoritmo,
que sólo se diferencia de la suma de enteros en que el posible arrastre se
agrega al resultado final:
+
+ 23
− 15
→
→
+
1
2
8
0
3
4
7
+1
→
0
8
37
2.2. Representación digital de los datos
Consideremos ahora esta representación con palabras de N = 4 dı́gitos
binarios: las cantidades representables son
−7, −6, . . . , −0, +0, . . . , +6, +7
→ −111(2 , −110(2 , . . . , −0(2 , +0(2 , . . . , +110(2 , +111(2
que, al complementar las negativas respecto de 1111, resulta:
→ 1000, 1001, . . . , 1111, 0000, . . . , 0110, 0111
Números enteros con signo. Complemento auténtico
Empezamos nuevamente con la base decimal como punto de partida,
y consideremos también palabras de longitud N = 2. Ahora se opta por
considerar los números negativos de {−50, . . . , −1}, y los positivos de
{0, . . . , 49}, del siguiente modo: los números positivos se representan en
binario natural, mientras que para cada negativo −z se toma la cantidad
100 − z (complemento de z respecto de 10, que es la base para N = 2).
repr(29) =
2
9
repr(−29) = 100 − 29 =
7
1
Con frecuencia se emplea otra regla equivalente para complementar
los números negativos, consistente en añadir una unidad al correspondiente complemento restringido.
Con este convenio, las cantidades
−50, −49, . . . , −1, 0, 1, . . . , 48, 49
se representan respectivamente mediante
5 0 , 5 1 , ... , 9 9 , 0 0 , 0 1 , ... , 4 8 , 4 9
Este sistema tiene las mismas ventajas que el anterior, y además el
cero se representa de un único modo.
38
Capı́tulo 2. Representación de la información
Como en el caso anterior, consideremos ahora la base dos, con palabras de N = 4 dı́gitos, donde tienen cabida las cantidades
−8, −7, . . . , −1, +0, . . . , +7
→ −1000(2 , −111(2 , . . . , −1(2 , +0(2 , . . . , +110(2 , +111(2
que, al complementar las negativas respecto de 10000, resulta:
→ 1000, 1001, . . . , 1111, 0000, . . . , 0110, 0111.
En este sistema, la suma también se lleva a cabo con un mismo algoritmo, igual al usado para el complemento restringido, pero ignorando
la posible cifra de arrastre:
+
+ 23
− 15
→
→
+
1
2
8
0
3
5
8
→
0
8
Funcionamiento de las operaciones aritméticas
Debe subrayarse que las operaciones anteriores no coinciden con las
aritméticas, debido a la posibilidad de que se produzca un desbordamiento; los diferentes sistemas responden ante esta circunstancia de diferentes modos: por ejemplo, ignorando la última cifra de arrastre, o
interrumpiendo su trabajo para delatar una condición de error. Por lo
tanto, es necesario prever esta posibilidad y conocer de qué modo reacciona nuestro sistema. Sobre este asunto volveremos más adelante,
dentro de este mismo capı́tulo.
Formatos de los números enteros en las computadoras
Entre los convenios presentados, el más frecuente es el del complemento auténtico en base dos, llamado simplemente complemento a dos.
Ahora bien, dependerá de la longitud de palabra la cantidad de combinaciones posibles y, por tanto, el rango de enteros considerado. Por
otra parte, aunque ciertos sistemas trabajan con palabras de longitud
variable, lo corriente es optar por uno o varios formatos con tamaño fijo:
simple (1 byte), doble (2 bytes), cuádruple (4 bytes) u óctuple (8 bytes).
39
2.2. Representación digital de los datos
2.2.2
Representación de los números reales
Debe resaltarse que, en general, sólo resulta posible representar aproximaciones de los números reales mediante números decimales, con sólo
unas pocas cifras significativas. En el siguiente apartado estudiaremos
los efectos de este redondeo.
En este apartado, supondremos que disponemos de un espacio de N
bits, con lo que es posible representar 2N enteros distintos.
Convenio con coma fija
Si disponemos de un espacio de N bits para representar un número
real, la caracterı́stica principal de este convenio es la reserva implı́cita
de algunos bits fijos para la parte decimal, asumiéndose la coma en una
posición fija. A su vez, existen los siguientes modos de representación
en coma fija:
• Sistema signo y valor absoluto
En este convenio se reserva un bit para codificar el signo, y del resto
se destina una cantidad fija para representar el valor absoluto de
la parte entera, y los demás para la decimal:
1
|{z}
±
0
1
0
0
1
|
0
0
{z
p. entera
1
0
1
1
}
1
1
. |
0
1
{z }
dec.
Si consideramos por ejemplo N = 16, siendo el primer bit el que
codifica el signo, los siguientes 12 los de la parte entera, y los
3 restantes los de la parte decimal, resulta que la representación
anterior significarı́a
−010010010111.101
= −(210 + 27 + 24 + 22 + 21 + 20 + 2−1 + 2−3 )
= −11750 625.
40
Capı́tulo 2. Representación de la información
• Complemento restringido y complemento auténtico
Sea D = 3 el número (fijo) de decimales asumidos. La representación de un número x, en cualquiera de estos convenios, consiste
en codificar en su lugar la parte entera de x ∗ 23 en el convenio
elegido. La cantidad despreciada al truncar los decimales de x ∗ 23
es menor que 00 125(10 (= 2−3 ).
Por ejemplo, para representar −20 8 en palabras de N = 8 y D = 3,
debemos conformarnos con una aproximación: al ser D = 3, sólo podemos representar cantidades decimales múltiplos enteros de 00 001(2 =
0
0
0
2−3
(10 = 0 125(10 . Como trunc(−2 8 ∗ 8) = trunc(−22 4) = −22, representamos −22/8 = −20 75. Comprobamos que esta cantidad es efectivamente múltiplo de 00 125, y que el siguiente múltiplo (−20 875) excede la
cantidad inicial (−20 8).
• Signo y valor absoluto:
2.75 = 2 +
1 1
+
2 4
=
1
0
|{z}
±
|
0
1
0
{z
} .
p. entera
1
1
0
| {z }
dec.
• Complemento restringido (8 dı́gitos):
(
−22 = −
11111111
10110(2
)
→ 11101001 = 1 1 1 0 1 0 0 1
• Complemento auténtico (8 dı́gitos):
(
−22 = −
100000000
10110(2
)
→ 11101010 = 1 1 1 0 1 0 1 0
Convenios con coma flotante
El principal inconveniente de la coma fija consiste en condicionar
el orden de magnitud de las cantidades codificadas. Un sistema más
general deberá adaptarse a órdenes tan distantes como los de la masa de
2.2. Representación digital de los datos
41
la tierra y la del átomo. El sistema más conocido con esta caracterı́stica
es la llamada notación exponencial (o cientı́fica):
140 = +0.14 ∗ 103 = +0.14E3
6.02215 ∗ 1023
= +0.602215E24
0.00000015
= +0.15E − 6
Los convenios con coma flotante funcionan del mismo modo, dividiendo la información sobre una cantidad en tres partes: su signo, su
mantisa (es decir, las cifras significativas de mayor orden), y el exponente
(que expresa el orden de magnitud). Ası́ por ejemplo, consideremos la
siguiente representación en palabras de N bits:
• El signo, adscrito al primer bit, donde el uno representa al signo
menos.
• El exponente (z), situado en los siguientes e bits, puede tomar los
valores de {−2e−1 , . . . , 2e−1 − 1}. Frecuentemente se representa
desplazado en +2e−1 unidades:
z ∈ {−2e−1 , . . . , 2e−1 − 1} ⇒ repr(z) ∈ {0, . . . , 2e − 1}
• Para la mantisa quedan M = N − e − 1 bits con lo que, para su
representación, se toman los primeros M dı́gitos de su escritura en
binario natural.
Como ejemplo concreto, consideremos el convenio estándar IEEE 754
(real con precisión simple, o real corto), que es una de las codificaciones
de reales más utilizadas. Su representación requiere un total de 32 bits,
de los cuales un bit se utiliza para el signo, 8 bits para el exponente
y 23 bits para la mantisa. Este convenio en concreto, utiliza un truco
llamado bit oculto: como el bit más significativo de la mantisa es un 1,
ahorramos un bit simplemente asumiéndolo. Se logra ası́ espacio para
una mantisa de 24 dı́gitos significativos. El inconveniente de emplear un
bit oculto consiste en que se requiere una representación especial para
el cero.
42
2.2.3
Capı́tulo 2. Representación de la información
Limitaciones de los sistemas de representación
digital de los números
Debido a que los sistemas de codificación considerados están inmersos en sistemas finitos, sólo pueden representar una cantidad finita de
elementos distintos. Esta limitación resulta crı́tica a la hora de representar elementos pertenecientes a conjuntos infinitos, como son los de
los números enteros o reales. Como consecuencia, pueden producirse
situaciones de error no deseables, por lo cual se hace necesario estudiar
el alcance de esas limitaciones, ası́ como la manera de afrontarlas.
Limitaciones en los enteros
En los enteros, las representaciones se limitan a un intervalo reducido
[mı́n, máx ], de cardinal no superior a 2n , siendo n el tamaño (en bits)
de la representación. Ası́, cuando surge la codificación de números fuera
del rango considerado, se produce el llamado desbordamiento (overflow
en inglés).
Por ejemplo, en una representación con 4 bits serán posibles 16 configuraciones. Si optamos por el convenio de complementación auténtica,
el intervalo considerado será [−8, 7]. Veamos qué ocurre al sumar 5 y 6.
+
5
6
→
→
+
0101
0110
1011
→
−5
El comportamiento de las operaciones de suma y resta en el sistema
de complementación auténtica para una representación de n bits se puede
describir ası́: llamemos x0 e y 0 a la representación de x e y, y +0 y −0 a las
operaciones de suma y resta en este sistema, ∀x, y ∈ [−2n−1 , 2n−1 − 1],
tenemos:
x0 ±0 y 0 =
n 0
(x ± y + 2 ) ,
(x ± y)0 ,
(x ± y − 2n )0 ,
si x ± y < −2n−1
si x ± y ∈ [−2n−1 , 2n−1 − 1]
si x ± y > 2n−1 − 1
Para paliar en cierta medida esta limitación, es frecuente incorporar tipos de datos correspondientes a rangos de enteros más amplios
2.2. Representación digital de los datos
43
(por ejemplo, duplicando la longitud de palabra de la representación),
pudiendo ası́ manipular con seguridad enteros de mayor orden. Ası́
por ejemplo, el cálculo de 8! desbordará un sistema de complemento
auténtico con 16 dı́gitos, resultando en cambio correcto para palabras
más largas. En ocasiones, el programador tiene la posibilidad de cambiar¡ de
estrategia para evitar el desbordamiento. Por ejemplo, el cálculo
8¢
8!
de 3 se puede obtener evaluando 3!∗5!
o 8∗7∗6
3∗2∗1 indistintamente; sin embargo, el primero de ellos necesita manipular números mayores, por lo
que el segundo nos permite eludir en cierta medida el error por desbordamiento.
Por otra parte, muchos de los lenguajes que se comercializan en la
actualidad ofrecen la opción de verificar o no los desbordamientos que
puedan producirse durante la ejecución, para que los consiguientes errores no pasen inadvertidos.
Finalmente, la mayorı́a de los lenguajes de alto nivel presentan sistemas de construcción de tipos de datos con capacidad para definir codificaciones (y operaciones de manipulación sobre los objetos cifrados)
a la medida de nuestras necesidades.
Limitaciones en los reales
En este caso, incluso limitándonos a los reales contenidos en un pequeño intervalo acotado, éstos serı́an infinitos, por lo cual las limitaciones
en su representación no sólo afectan al tamaño de los números considerados, sino también a la precisión. En efecto, en cualquiera de los
convenios estudiados se toma como mantisa sólo cierto número reducido
de dı́gitos(binarios) significativos, despreciándose los demás.
En otras palabras, cada codificación de un número real en coma
flotante representa en realidad un intervalo, cuyo tamaño varı́a según
la magnitud del real representante. Por consiguiente, la distribución de
representantes no es uniforme: un intervalo tan pequeño como [0’1, 1]
cuenta con tantos representantes como [1000, 10000].
Además de las limitaciones de la precisión, la representación de los
reales está limitada por su tamaño: existe un valor a partir del cual no
44
Capı́tulo 2. Representación de la información
hay representantes reales y que determina el rango de desbordamiento.
Debe observarse en este punto que existen cantidades cuya expresión
decimal es exacta, sin serlo su expresión escrita en binario natural (por
ejemplo, 00 1(10 = 00 0 0011 0011 . . .(2 ), por lo que, en principio, debe desconfiarse de la precisión en la codificación de todo número no entero.
Aunque esta diferencia entre una cantidad y su representación es en
muchos casos despreciable, su aparición puede ocasionar grandes desviaciones respecto del comportamiento teórico.
Una situación ası́ se produce cuando se comparan dos números reales
para determinar su igualdad, ya que el resultado de la comparación
ignora si esa diferencia producida es pequeña o grande, lo que puede
ocasionar una respuesta drásticamente distinta de la correcta. Ası́ por
ejemplo, la ejecución del siguiente programa escrito en Pascal
Program errores (output);
var suma: real;
begin
suma := 0;
repeat
suma := suma + 0.1;
writeln(suma);
until suma = 1
end.
no para.1 Frecuentemente esta situación puede evitarse cambiando la
expresión x = y por | x − y |< ε, siendo ε la diferencia admitida.
En realidad, la aparición de errores intolerables es posible incluso
en expresiones sencillas. Concretamente, deberı́an evitarse las operaciones de suma y resta, cuando uno de los operandos es muy pequeño
en comparación con el otro, y la división cuando el divisor es cero o
“próximo a cero”. Por ejemplo, la relación |t/x| ≤ ε deberı́a sustituirse
por |t| ≤ ε ∗ |x|.
1
Suponiendo una representación en binario puro.
2.2. Representación digital de los datos
45
Más aún, aun cuando se trate de un error despreciable, es frecuente
que ese error intervenga en cálculos repetidos, como ocurre en la manipulación de matrices, el cálculo con series recurrentes, etc.; en tales
situaciones, la propagación de un error inicial, aunque pequeño, puede
generar un error mucho mayor. El estudio y la cuantificación de los
errores, ası́ como su propagación en cálculos repetitivos y los métodos
para encontrar soluciones satisfactorias, escapan del alcance y objetivos
de este curso, siendo materia propia de los métodos numéricos.
Otros sistemas de representación (paquetes matemáticos)
Durante la pasada década, se han desarrollado y difundido paquetes
de programas matemáticos, capaces de resolver eficientemente un extenso número de problemas, manipulando expresiones tanto numéricas
como simbólicas. Para ello están provistos (aparte de otros mecanismos)
de potentes sistemas aritméticos de representación no convencionales.
Veamos dos ejemplos de estas posibilidades:
• Capacidad de representar enteros con tamaño limitado sólo por
la memoria del ordenador, fracciones y reales con una precisión
arbitraria, elegida por el usuario. Por ejemplo:
sea precisión decimales = 25
escribir pi
3.1415926535897932384626433
• Capacidad de establecer valores numéricos (reales o complejos)
mediante su definición, en lugar de su cálculo, con lo que no hay
pérdida de precisión. Ası́, es posible establecer sentencias del estilo
de las siguientes:
sea x0 := x tal que x2 + 5 = 0
escribir (1 − x0 2 )/2
cuya ejecución producirı́a la escritura de 3, exactamente.
46
Capı́tulo 2. Representación de la información
2.2.4
Representación de los caracteres
Existen otros convenios, además de los numéricos, para representar
los caracteres disponibles habitualmente en un teclado de computador:
los dı́gitos, las letras minúsculas y mayúsculas, los signos de puntuación
y de operación y otros sı́mbolos especiales, tales como #, &, @, %, etc.
Inicialmente surgieron numerosos convenios para codificar los caracteres, variando el número n de bits empleados (y con él su capacidad de
representación), ası́ como la posición, entre 0 y 2n − 1, asignada a cada
carácter. Sin embargo, en seguida se observó la necesidad de adoptar
convenios normalizados, ası́ como la conveniencia de que éstos tengan
ciertas cualidades:
• Debe incluirse el juego de letras mı́nimo internacional, en dos intervalos de posiciones consecutivas, correspondientes a las letras
minúsculas y mayúsculas.
• Los caracteres correspondientes a los dı́gitos deben ocupar también
posiciones correlativas, de “fácil” cifrado y descifrado.
Además, cuando la capacidad de representación lo permita, será deseable
que en un sistema sea posible:
• Añadir otros caracteres más especı́ficos: frecuentemente, los propios de una lengua (las “á” y “ñ” españolas, la “û” francesa, etc.)
• Destinar ese exceso de capacidad a prevenir y subsanar posibles
errores, como veremos en el siguiente apartado.
Uno de los convenios más extendidos en la actualidad es el ASCII, con
7 bits, por lo que admite hasta 27 = 128 caracteres. Damos la siguiente
tabla, omitiendo los primeros 32 caracteres, por ser caracteres de control.
47
2.2. Representación digital de los datos
32
33
34
35
36
37
38
39
40
41
42
43
!
”
#
$
%
&
’
(
)
*
+
44
45
46
47
48
49
50
51
52
53
54
55
,
.
/
0
1
2
3
4
5
6
7
56
57
58
59
60
61
62
63
64
65
66
67
8
9
:
;
¡
=
¿
?
@
A
B
C
68
69
70
71
72
73
74
75
76
77
78
79
D
E
F
G
H
I
J
K
L
M
N
O
80
81
82
83
84
85
86
87
88
89
90
91
P
Q
R
S
T
U
V
W
X
Y
Z
[
92
93
94
95
96
97
98
99
100
101
102
103
\
]
ˆ
‘
a
b
c
d
e
f
g
104
105
106
107
108
109
110
111
112
113
114
115
h
i
j
k
l
m
n
o
p
q
r
s
116
117
118
119
120
121
122
123
124
125
126
t
u
v
w
x
y
z
{
|
}
˜
En este convenio, se observa en primer lugar que los dı́gitos decimales
“0”, . . . , “9” ocupan las posiciones 48, . . . , 57: sus valores (0000, . . . ,
1001 ) coinciden con las terminaciones de sus posiciones (0110000, . . . ,
0111001 ).
Siguiendo la segunda condición, las letras mayúsculas y minúsculas
se hallan situadas en las posiciones 65 a 90 y 97 a 122, respectivamente.
En la práctica no se utilizan palabras de 7 bits, siendo frecuente
en cambio adoptar el byte (= 8 bits) como unidad. Ası́, es posible
extender el convenio anterior y dar cabida a otros caracteres de uso
también interesante en ciertas aplicaciones; he aquı́ algunos ejemplos:
Posición:
Carácter:
2.2.5
130
é
145
æ
156
£
164
ñ
165
Ñ
168
¿
248
◦
Organización de datos más complejos
Los computadores no sólo almacenan y manipulan números y caracteres, sino que también deben organizar y tratar informaciones más
complejas, tales como sucesiones de datos (por ejemplo, cadenas de caracteres), vectores, tablas, etc., ya sea formadas por datos simples o bien
por conjuntos de información con alguna organización. Con tal finalidad
se han ideado diversas estrategias; aunque su estudio excede el alcance
de este capı́tulo, veamos un ejemplo orientativo.
48
Capı́tulo 2. Representación de la información
Supongamos una máquina de 1 byte (tamaño de palabra). Si se
adopta para los números enteros un convenio de 2 bytes, cada número
ocupará dos palabras consecutivas. Una forma natural y sencilla de
organizar un vector de n enteros consiste en situarlos secuencialmente,
empezando en las posiciones m0 , m0 + 2, . . . , m0 + 2(n − 1), y la componente i-ésima del vector reside en las posiciones m0 +2(i−1) y m0 +2i−1,
para i ∈ {1, . . . , n}.
Si se tratase de una matriz de m ∗ n, cuyas componentes ocupan k
palabras de memoria, se establece fácilmente la posición inicial para la
componente i, j-ésima:
m0 + k(n(i − 1) + j − 1)
para i ∈ {1, . . . , n}, j ∈ {1, . . . , m} y siendo m0 la posición inicial de la
matriz.
2.2.6
Representación de las instrucciones
Aunque podrı́a parecer impropio considerar las instrucciones como
informaciones, lo cierto es que los programas se almacenan en la memoria
del ordenador y manipulan del mismo modo que los datos. De hecho,
desde el punto de vista de la máquina, un programa no es más que una
secuencia de elementos, cada uno de los cuales es un descriptor de una
instrucción elemental.
El formato de las instrucciones (es decir, de sus descriptores) depende
de la máquina destinada a seguirlas. Si consideramos por ejemplo una
máquina de tres direcciones (véase cap. 3), sus instrucciones se componen de cuatro campos que codifican respectivamente la operación que
debe efectuarse y las posiciones de memoria en que se encuentran los
(como máximo dos) argumentos y la de la palabra donde debe situarse
finalmente el resultado. En el capı́tulo siguiente se presenta con detalle
uno de estos formatos.
2.3. Códigos redundantes
2.3
2.3.1
49
Códigos redundantes
Información y redundancia
Información e incertidumbre.- El término información tiene en general un significado muy amplio: piénsese en la información proporcionada por una fotografı́a o un poema. Por eso, en el contexto de la informática como ciencia que trata sobre el tratamiento automático de la
información, se asocia a ésta un significado más restringido y manejable.
Para definir este significado, consideremos que deseamos determinar
un cierto fenómeno, que puede presentar una cantidad finita de estados.
Entonces, una información (sobre ese fenómeno) es una sentencia capaz
de aportar algún conocimiento sobre tal fenómeno; esto es, capaz de
delimitar en cierta medida su estado.
Ası́ por ejemplo, si consideramos el fenómeno “colores del atuendo
que llevaba anoche el asesino del callejón”, sabiendo que el pantalón
era negro o marrón, que la camisa era azul, gris o marrón, y que el
sombrero era gris o negro, resulta que el número de estados es 12. Una
información sobre este fenómeno podrı́a consistir en la sentencia “la
camisa y el pantalón eran de distinto color”; con esta información, sólo
son posibles 10 estados de nuestro fenómeno. Ahora, la afirmación “la
camisa y el pantalón no eran ambos marrones” resulta redundante puesto
que, considerándola, siguen siendo posibles los mismos 10 estados que
ignorándola.
En lugar de hablarse de cantidad de información, resulta más fácil
manipular la de incertidumbre. Una medida indirecta de ello consiste
en la cantidad de estados posibles: su grado de indeterminación. Si
cierto fenómeno ofrece 12 estados posibles, su grado de indeterminación
es 12, pero resulta más conveniente considerar como medida de la incertidumbre el logaritmo (en base dos) de esta cantidad, puesto que la
incertidumbre crece de forma exponencial (con base dos) respecto de la
longitud (número de bits) del mensaje. Esta medida de la incertidumbre
se llama entropı́a asociada a un fenómeno, y se denota mediante H:
H = log2 (número de estados posibles de un fenómeno)
50
Capı́tulo 2. Representación de la información
Entonces, la información asociada a una sentencia se define como
disminución de incertidumbre proporcionada. Siendo H0 = log2 (n0 )
y H1 = log2 (n1 ) las entropı́as correspondientes a los estados previo y
posterior a la sentencia, con n0 y n1 posibles estados, respectivamente,
tenemos:
µ ¶
n0
I = H0 − H1 = log2 (n0 ) − log2 (n1 ) = log2
.
n1
Por ejemplo, para la primera sentencia, tenemos:
I1 = log2 10 2 > 0
mientras que la segunda proporciona una cantidad de información nula,
al ser redundante.
La redundancia en la codificación.- En los convenios de codificación/decodificación estudiados hasta ahora, se ha supuesto que su transmisión o su almacenamiento se efectúa siempre sin ruido. En ellos, el
objetivo principal consiste en diseñar convenios eficaces (sin emplear más
dı́gitos que los estrictamente necesarios, minimizando ası́ la redundancia), unı́vocos (donde el cifrado es único) y sin ambigüedad, siendo única
toda decodificación.
Para prever la posibilidad de que se produzcan perturbaciones, se
han ideado métodos capaces de descubrir en ciertas condiciones cuándo
se ha alterado un mensaje (códigos detectores), ası́ como otros capaces
de restituir su estado inicial (códigos correctores).
Ambas clases de mecanismos se apoyan en el uso de la redundancia. Anticipamos un par de ejemplos para aclarar ambos tipos de mecanismos.
Adición de un bit de paridad.- Para un mensaje de n bits se añade
uno, cuyo valor consigue que haya en total un número par de unos. Se
ignora la posibilidad de que se altere más de un bit, por considerarla
extremadamente improbable. En la interpretación del mensaje se verifica
previamente la paridad, detectándose un error si se ha producido, aunque
no será posible identificar cuál para restablecer su estado.
51
2.3. Códigos redundantes
Código dos entre tres.- Este mecanismo consiste sencillamente en
triplicar las copias de cierta información. Se consideran dos posibilidades: que no se produzca ninguna alteración, o que se produzca en una de
las copias, descartándose mayores perturbaciones. En ambos casos, se
interpreta el mensaje cifrado en la mayorı́a de las copias: dos (al menos)
entre tres.
2.3.2
Códigos sólo autodetectores: p de n
Si en una palabra de n bits (que admite 2n configuraciones) establecemos la restricción de considerar válidas sólo aquéllas con exactamente
p unos (y n−p ceros), será posible detectar si se efectúa una perturbación
simple, o una múltiple, siempre que no se alteren tantos unos como ceros. En un código p de n, el grado de indeterminación es el número de
permutaciones con repetición de p unos y n − p ceros
à !
n
p
=
n!
p!(n − p)!
que alcanza su máximo cuando p = n div 2.
2.3.3
Códigos autocorrectores: Hamming
Fundamento
Consideremos un mensaje de n bits. La idea básica consiste en añadir
un cierto número p de bits, cada uno de los cuales asegura un cierto
subconjunto de los n + p dı́gitos totales mediante un control de paridad.
Se considera la posibilidad de que exista, a lo sumo, una alteración en
uno de los n + p bits y deseamos conocer si ha habido o no perturbación
y, en caso afirmativo, cuál de los n + p bits ha sido alterado. Puesto que
el mensaje debe codificarse en los n bits, la información sobre el estado
de perturbación debe cifrarse en los p bits, para poder ası́ restablecerla.
Por tanto, conocido n, p debe ser la mı́nima cantidad de bits tal que los
2p estados posibles de los p bits de paridad acepten al menos n + p + 1
estados distintos: no alteración (1) o la posición del bit alterado (n + p).
Es decir:
p = mı́n k ∈ IN tal que 2k ≥ n + k + 1
52
Capı́tulo 2. Representación de la información
Por otra parte, los p conjuntos de bits deben elegirse de modo que
el estado de los p bits de paridad asociados a esos conjuntos permita
localizar el bit alterado, en su caso y, si es posible, con facilidad.
Un modo de conseguir el objetivo descrito consiste en intercalar el
bit i-ésimo en la posición 2i−1 , para i = 1, . . . , p, siendo su conjunto
asociado el de los dı́gitos cuyo número de posición, escrito en binario
natural, tiene un 1 como cifra i-ésima.
Sea por ejemplo n = 4. Necesitamos p = 3 bits de paridad, que
colocaremos en las posiciones 1, 2 y 4:
posición :
id. en binario :
1
001
2
010
3
011
4
100
5
101
6
110
7
111
Ahora, el bit 001(2 está asociado al conjunto de los bits del mensaje
cuya posición acabe en 1 (1, 3, 5 y 7); el bit 010(2 está asociado al
conjunto de los bits del mensaje cuya posición tenga un 1 en la segunda
cifra (2, 3, 6 y 7), y el bit 100(2 está asociado al conjunto de los bits del
mensaje cuya cifra inicial sea un 1 (4, 5, 6 y 7).
Codificación
Sencillamente, se trata de ajustar los bits de paridad con respecto a
sus conjuntos asociados. Por ejemplo, si se desea transmitir el mensaje
0110
0
1
1
0
bastará con ajustar el bit 10 con los 30 , 50 y 70 (resultando un 1); el bit
20 con los 30 , 60 y 70 (resultando un 1), y el bit 40 con los 50 , 60 y 70
(resultando un 0):
1
1
0
0
1
1
0
53
Anexo
Decodificación con autocorrección
Para rectificar y descifrar un mensaje recibido, se detectan en primer lugar los bits de paridad que reflejan alguna alteración. Si no hay
ninguno, el mensaje se ha mantenido intacto durante la transmisión; en
caso contrario, la suma de las posiciones de los bits alterados señala el
bit modificado.
Por ejemplo, si el mensaje anterior se recibe ası́:
1
1
0
0
0
1
0
el control de paridad arroja el siguiente resultado:
bit 10 (+3 + 5 + 7) = 1 (impar) ⇒ alterado
bit 20 (+3 + 6 + 7) = 2 (par) ⇒ sin alterar
bit 40 (+5 + 6 + 7) = 1 (impar) ⇒ alterado
Al ser 1 + 4 = 5, concluimos que el 50 bit es erróneo, por lo que el
mensaje original era
1
1
0
0
1
1
0
Anexo: demostración del teorema 2.1
Incluimos aquı́ esta demostración por ser constructiva, mostrando
el proceso de expresar una cantidad en cualquier base mayor que uno.
Procederemos en cuatro fases: en primer lugar, la existencia de esa
representación en las condiciones del teorema se demuestra fácilmente
por inducción, dando un método para hallar esa construcción. En segundo, se demuestra (también por inducción) que ese método converge
y a continuación que la solución que proporciona equivale efectivamente
a la cantidad dada. Finalmente, se demuestra que no hay más que una
representación de un número en una base (≥ 2) dada.
54
Capı́tulo 2. Representación de la información
1. Dada la cantidad entera y positiva N , y la base b > 1, la representación de N en base b sigue el siguiente esquema:
reprb (N ) =
N
si N < b
reprb (D).R
en otro caso, donde
D = N div b y R = N mod b
donde el punto expresa la separación entre las cifras de N , expresado en la base b, y donde div y mod representan, respectivamente,
el cociente y el resto de la división entera.
2. La convergencia del método resulta obvia considerando que, partiendo de cualquier número entero positivo N , la secuencia N =
N0 , N1 , ... conduce al conjunto {0, ..., b} mediante la aplicación de
Ni = Ni−1 div b, en un número finito, trunc(logb N ), de pasos.
3. La equivalencia queda demostrada por inducción sobre el número
de cifras de la representación obtenida: cuando N < b, tenemos el
caso base reprb (N ) = N ; en caso contrario, basta considerar que
la cantidad representada por reprb (D).R es
b ∗ reprb (D) + R= b ∗ reprb (N div b) + (N mod b)
Asumiendo ahora como hipótesis inductiva que reprb (N div b) representa la cantidad N div b, podemos expresar la cantidad anterior como
= b ∗ (N div b) + (N mod b)
que es precisamente N : recuérdese que
dividendo = divisor ∗ cociente + resto
4. En las condiciones del teorema, esa representación es única. Lo demostraremos por reducción al absurdo. Supongamos que es posible
expresar una cantidad x de dos modos distintos, cuyas representaciones tienen las cifras ...a0 y ...a00 , siendo L la posición de las
cifras distintas de mayor peso, y consideremos por ejemplo que es
aL > a0L . Entonces, se tiene:
55
2.4. Ejercicios
(a) La diferencia entre aL y a0L representa al menos bL unidades:
aL ∗ bL > a0L ∗ bL ⇒ aL ∗ bL ≥ (a0L + 1) ∗ bL = a0L ∗ bL + bL
(b) Por otra parte, la cantidad máxima que pueden representar
los dı́gitos siguientes es de
L−1
X
(b − 1) ∗ bi = bL − 1.
i=0
Resulta entonces que la diferencia que supone la cifra distinta de
mayor orden (≥ bL ) no puede compensarse por ninguna combinación de las siguientes (≤ bL − 1). Por tanto, si dos representaciones son distintas en alguna cifra, también lo son las cantidades
representadas.
2.4
Ejercicios
1. Exprese los siguientes números en las demás bases:
binario puro
1001110011
decimal
hexadecimal
6723
1A9E
2. Efectúe las siguientes operaciones, en la base indicada:
• 11011101(2 + 11110000(2
• 11000101(2 ∗ 101001(2
• A2396(16 + 24BC2(16
• A2396(16 ∗ 1A(16
Para el último apartado es recomendable construir previamente la tabla
de multiplicar por A, en base hexadecimal.
3. Halle el rango de los posibles enteros,
• si consideramos palabras de tamaño medio
• si consideramos palabras de tamaño simple
56
Capı́tulo 2. Representación de la información
• si consideramos palabras de tamaño doble
4. Represente 7 y −3 en los siguientes formatos, y realizar la suma correspondiente:
• complemento restringido, en decimal
• ı́dem, en binario
• complemento auténtico, en decimal
• ı́dem, en binario
Haga lo mismo con 12 y 7.
5. Represente los números 35, 0’25 y 2’6 en los siguientes formatos:
• en coma fija, con 5 bits enteros y 3 decimales
• coma flotante: signo (1 bit), mantisa (9) y exponente (6)
6. Generalice la representación en memoria de vectores y matrices a matrices tridimensionales.
7. Se desea diseñar un código capaz de cifrar una información con 33 posibles
estados.
• ¿Cuántos bits son necesarios?
• Con ese número de dı́gitos, ¿cuántos estados son posibles?
• Un control del tipo 2 de n, ¿cuántos dı́gitos necesita?
8. Se desea transmitir mensajes de 31 bits, asegurándolos mediante un
código de Hamming.
• ¿Cuántos dı́gitos de paridad se necesitan?
• ¿En qué posiciones?
• ¿Cuáles son los dı́gitos asociados a cada uno de los de paridad?
9. Para el código de Hamming para mensajes de 4 bits introducido en el
apartado 2.3.3, se desea transmitir la información 1001.
• Cifre el mensaje que debe enviarse
• Si consideramos las cinco posibilidades: que el mensaje llegue inalterado a su destino, o que uno de sus cuatro dı́gitos haya cambiado
su valor, descifre cada uno de esos mensajes.
2.5. Comentarios bibliográficos
57
10. Para cifrar un código de Hamming para mensajes de 11 bits, construimos
un vector de 15 bits.
• Dé fórmulas apropiadas para hallar la paridad de los bits insertados.
• Ídem para la autocorrección que se efectúa en el descifrado.
2.5
Comentarios bibliográficos
El material incluido en este capı́tulo sobre la representación de los números
reales en coma flotante sólo es una aproximación conceptual. En [Gol91] se
encontrarán muchos de los detalles técnicos omitidos aquı́, tales como el tratamiento dado en la práctica a los errores (absolutos y relativos) debidos al
redondeo, el manejo de las excepciones producidas por el desbordamiento y su
concreción en los sistemas normalizados por la IEEE.
Aunque el sistema de numeración sexagesimal no puede considerarse posicional (tal como lo usamos para medir el tiempo o los ángulos) por expresarse
el peso asociado a las “cifras” de una cantidad explı́citamente, y no mediante
su posición, este sistema es probablemente el precursor de los sistemas posicionales. Para completar la referencia histórica, debe decirse que, en la antigua
Babilonia, también se conocı́a un sistema de coma flotante, que seguramente
es el primero de esta clase [Knu72].
En [For70, Rum83, KM86] puede encontrarse una gran diversidad de ejemplos sobre la aparición de discrepancias intolerables entre los resultados teóricos
y los hallados en diversas máquinas.
Los convenios presentados en este capı́tulo constituyen tan sólo una pequeña parte de los ideados para mantener o proteger la información. Se han
escogido algunos de los códigos más ilustrativos y los más difundidos, aunque faltan otros, tales como el llamado binario reflejado y los de Gray. Una
introducción a los mismos puede consultarse en [Mei73].
Un aspecto de gran interés relacionado con la protección de la información
es la criptologı́a, que estudia mecanismos para ocultarla, cifrándola en claves
secretas (criptografı́a), ası́ como para descifrarla (criptoanálisis). En [Dew88,
Dew89] puede encontrarse una sencilla introducción a estos temas.
Capı́tulo 3
Estructura fı́sica de un
computador
3.1
3.2
3.3
3.4
3.5
3.6
3.7
Componentes de un computador
Lenguajes de máquina . . . . . .
Un ejemplo de recapitulación . .
Observaciones complementarias .
Otras arquitecturas . . . . . . . .
Ejercicios . . . . . . . . . . . . .
Comentarios bibliográficos . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
60
77
80
88
95
98
99
El principal objetivo de este tema es introducir algunos conceptos
básicos acerca de la estructura fı́sica (hardware) de un computador; pero
¿es de verdad útil preocuparse por la estructura interna de un computador?
Entre las dos posiciones extremas (el simple usuario y el informático
profesional) se encuentra una gran cantidad de profesionales que requieren conocer los computadores con un cierto detalle. Al menos, siempre es
necesario conocer las caracterı́sticas del computador y los requerimientos
(fı́sicos) de los programas que deben usarse.
En las siguientes secciones estudiamos el hardware de una computadora, formado por la UCP, la memoria y los periféricos (también llamados dispositivos de entrada y salida, E/S).
60
Capı́tulo 3. Estructura fı́sica de un computador
El significado del término hardware no es fácil de expresar en español
con una sola palabra; literalmente se debe entender como “conjunto de
útiles duros”; en el contexto que nos ocupa, el hardware de un computador es el conjunto de dispositivos fı́sicos que lo componen, mientras que
otra palabra inglesa, software, designa los programas que puede ejecutar
el computador.
En cierto modo, el hardware es comparable al cerebro o, más generalmente, al cuerpo fı́sico del computador mientras que el software
serı́a lo equivalente a las ideas que pueblan el cerebro. Es conveniente
señalar, a pesar de su evidencia, que el hardware y el software son perfectamente inútiles aisladamente: de nada nos sirve un computador si
no tenemos ningún programa que ejecutar, y de nada nos sirve tener
muchos programas si no disponemos de un computador que los ejecute.
Nuestra visión del sistema formado por el hardware y el software es
funcional, y en la última parte del capı́tulo será patente esta relación
de dependencia mutua: explicaremos el funcionamiento del hardware
siguiendo la ejecución de algunos programas sencillos, escritos en su
propio lenguaje.
3.1
Componentes de un computador
Para introducir los conceptos básicos que estudiaremos dentro de
esta sección consideramos un computador como una unidad de producción. Una unidad de producción adquiere materia prima, la elabora
y, finalmente, vende la materia elaborada. Esto mismo es lo que hace un
computador: toma algunos datos, los procesa y, finalmente, devuelve el
resultado obtenido al procesar la información.
Más concretamente, consideremos una panaderı́a ideal. En esta panaderı́a se compra harina, levadura, . . . (entrada de datos) que posteriormente se elaboran (procesamiento) para producir pan que, finalmente,
se vende (salida de datos). Para comprar y vender se necesitan personas que se relacionen con el exterior; en un computador esta labor se
realiza mediante los periféricos. Dentro de la panaderı́a podemos encontrar dos zonas bien diferenciadas e indispensables: la primera es la zona
61
3.1. Componentes de un computador
U.C.P.
U.C.
U.A.L.
M.P.
BUS
Contr.
Pantalla
Contr.
Teclado
Contr.
Disco
Contr.
Serie
Contr.
Paralelo
b
b
Teclado
U. Disco
Puerto
Serie
Puerto
Paralelo
Monitor
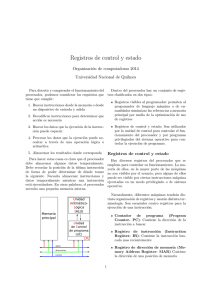
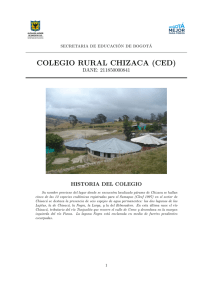
Figura 3.1. Estructura básica de un computador.
de amasado junto con el horno, y la segunda es el almacén.
En el computador el almacén lo representa la memoria y la zona
de trabajo es la unidad central de proceso o UCP que, a su vez, consta
de la unidad de control o UC (el encargado que controla los procesos
de amasado y horneado) y la unidad aritmética y lógica o UAL (zona
de amasado y horno). Naturalmente, entre las distintas zonas deben
existir pasillos de comunicación para poder sincronizar las acciones de
cada uno; en un computador esta información se envı́a y recibe a través
de los buses.
En las siguientes secciones estudiaremos cada una de las partes que
componen la estructura fı́sica de un computador. La figura 3.1 presenta
un esquema de la misma.
62
3.1.1
Capı́tulo 3. Estructura fı́sica de un computador
Memoria principal
Mencionábamos en el párrafo anterior que la memoria representa el
almacén donde se guarda la información, en esta sección estudiaremos
algunos detalles del almacenamiento de información en la memoria y de
los tipos de memoria existentes.
En la memoria principal se guarda el conjunto de instrucciones (programa) que está siendo ejecutado, junto con los datos de entrada y de
salida de la ejecución. Estudiaremos la memoria de un computador desde
un punto de vista fı́sico (distintos medios de almacenamiento) y desde
un punto de vista lógico (de tratamiento de la información).
Podemos encontrar similitudes entre la organización fı́sica de la memoria y el almacén de la panaderı́a ideal que introducı́amos al principio
del capı́tulo: en el almacén encontramos estanterı́as repletas de bandejas
iguales, y cuando un trabajador entra en el almacén, bien trae o bien
retira algunas de estas bandejas. La unidad mı́nima a la que se accede
no es una barra de pan (bit) sino una bandeja completa (palabra). La
longitud de palabra de memoria viene representada por la capacidad de
cada bandeja.
No podemos acceder a cada bit de la memoria aisladamente; la
mı́nima cantidad de memoria a la que podemos acceder está formada
por una palabra de memoria. Fı́sicamente, la memoria está dividida
en celdas (con una capacidad de información de un bit), agrupadas en
palabras de memoria.
Funcionamiento de la memoria
Para acceder a cada palabra de memoria debemos poder referirnos a
ellas. Esto se hace asignando una dirección numérica binaria a cada palabra a modo de “dirección postal”. La dirección de memoria determina
una palabra de memoria, que es la que contiene la información.
Supongamos que tenemos un computador que tiene palabras de memoria de 1 byte (8 bits) y dispone de 1 Mb (220 bytes) de memoria principal. Cada dirección de memoria tiene asignado un número en binario
3.1. Componentes de un computador
63
entre 0 y 220 − 1. Para poder denotar todas las palabras de memoria
disponibles necesitaremos al menos 20 dı́gitos ya que, en general, con
d bits es posible direccionar 2d palabras de memoria. Téngase en cuenta
que, en principio, la longitud de palabra de memoria no tiene relación
con la longitud de las direcciones de memoria; en el apartado sobre optimización de memorias tendremos la oportunidad de profundizar algo
más sobre ello.
En la memoria se realizan operaciones elementales de lectura y escritura, que escriben o leen la información contenida en una sola palabra
de memoria. Tanto la UCP como la memoria se sirven de unas cuantas
palabras de acceso muy rápido, llamadas registros. Para las operaciones de lectura y escritura, los dispositivos de memoria disponen de dos
registros: el de dirección (RD) y el de intercambio de memoria (RIM).
El RD indica la dirección de memoria que se quiere leer o en la que se
quiere escribir; puesto que debe tener capacidad para albergar cualquier
dirección de memoria, es un registro de d bits siguiendo la notación
anterior. Por su parte, el RIM alberga la palabra leı́da o que se va a
escribir en la dirección dada por el RD y, por lo tanto, tiene tantos bits
como la longitud de palabra de memoria. La memoria está conectada
con la UCP y con los periféricos a través de los buses de direcciones, de
datos y de control que describiremos más adelante.
El proceso de lectura o escritura se puede dividir en los siguientes
pasos:
1. A través del bus de direcciones llega un número de dirección de
memoria que se almacena en el RD.
2. Simultáneamente, por el bus de control, llega una señal que indica
si la operación que debe realizarse es de lectura o de escritura.
3. Si la operación es de escritura, por el bus de datos llega la palabra
que se quiere escribir. Ésta se almacena en el RIM y se escribe
donde indique RD. Si la operación es de lectura se lee la información que se encuentra en la dirección almacenada en el RD y se
escribe en el RIM.
64
Capı́tulo 3. Estructura fı́sica de un computador
4. La memoria genera, por el bus de control, una señal de control que
indica el fin de la operación.
Clasificación de las memorias
La memoria se encarga de intercambiar información con el procesador
según las necesidades de éste. Con la tecnologı́a actual los procesadores alcanzan velocidades de varios millones de cómputos por segundo,
lo que obliga a la memoria a tener una velocidad semejante a fin de
no menguar la eficiencia del computador. Por otra parte, la capacidad
de memoria es otra caracterı́stica interesante, ya que, en principio,1 no
podrı́amos ejecutar programas que no pudieran ser cargados completamente en memoria. Las caracterı́sticas de velocidad y capacidad están
reñidas entre sı́, por lo que es necesario alcanzar un compromiso entre
ambas dependiendo de la finalidad. Según el nivel de compromiso alcanzado podemos destacar varios niveles jerárquicos de memoria: de más
rápida y cara (por lo que suelen tener menor capacidad) a menos rápida
y mayor capacidad:
1. Memoria principal
2. Memoria secundaria
3. Memoria auxiliar
Los dos últimos tipos de memoria serán desarrollados en la sección de
periféricos, pues pueden ser considerados como periféricos de almacenamiento.
Hemos dicho anteriormente que las memorias son dispositivos de lectura y escritura, y esto es cierto cuando hablamos de la memoria principal de un computador. Sin embargo, existe otro tipo de memorias
de sólo lectura que hace las veces de manual de comportamiento de la
máquina que la contiene.
1
En realidad, cada programa tendrá unos requerimientos mı́nimos de memoria, aunque ello no significa que tenga que caber completo en la memoria.
3.1. Componentes de un computador
65
Las memorias de sólo lectura reciben el nombre genérico de memorias
ROM (acrónimo del inglés Read Only Memory). Los computadores vienen dotados con una memoria de este tipo donde se almacena la rutina
de arranque. Otras aplicaciones de este tipo de memoria las encontramos en las lavadoras automáticas (los programas de lavado se almacenan
en una ROM) y en los juguetes electrónicos. En este tipo de memoria
la información es almacenada de forma permanente.
Algunas variantes de la memoria ROM son la PROM (ROM programable), EPROM (PROM borrable, erasable PROM) y la EEPROM
(PROM eléctricamente borrable). Estos tipos de memoria son útiles en
la fase de desarrollo de un sistema, en la cual aún no se ha fijado el
contenido final de la ROM.
Las memorias de lectura y escritura suelen llamarse memorias RAM
(del inglés Random Access Memory). Dentro de este tipo de memorias podemos distinguir las RAM estáticas y las RAM dinámicas. Las
estáticas se caracterizan por tener un tiempo de acceso2 igual a cada dirección de memoria (cada dirección tiene su propio camino de acceso
dentro del microchip, generalmente construido con semiconductores).
Por otra parte, son memorias volátiles en el sentido de que necesitan
la alimentación eléctrica para conservar la información.
En las RAM dinámicas la información necesita ser recordada periódicamente, ya que se va descargando con el tiempo. Esta pérdida de
información es debida a que están construidas usando pequeños condensadores. La razón de ser de este tipo de memorias es la economı́a, pues
generalmente son más baratas que las estáticas.
Optimización de memorias
Sabiendo la necesidad de contar con memorias cada vez más rápidas
y con más capacidad se han ideado métodos de optimización para la memoria principal. Dependiendo del aspecto por optimizar encontramos las
2
El tiempo requerido para leer o escribir una palabra de memoria. En una memoria
estática puede ser de unos 20 ns, mientras que en una dinámica puede alcanzar los 80
ns.
66
Capı́tulo 3. Estructura fı́sica de un computador
memorias caché y la memoria virtual que, respectivamente, aumentan
la rapidez y la capacidad de la memoria principal.
Las memorias caché son memorias hasta mil veces más rápidas que
las usuales pero, debido a su alto coste, suelen tener una capacidad
muy pequeña. La idea que define las memorias caché no puede ser más
simple: se trata de guardar en registros los contenidos de las posiciones
de memoria de uso más frecuente, de modo que sea mucho más rápido
acceder a la información que hay en ellas.
El funcionamiento de la memoria caché ejerce una acción de filtro
sobre las direcciones de memoria que solicita la UCP. La secuencia de
acciones que se producen en las operaciones de lectura y escritura con
memoria caché son las siguientes:
1. La UCP genera una dirección de memoria que se envı́a a las memorias principal y caché.
2. Si la dirección se encuentra en la caché, será ésta la que devuelva
el dato e inhiba la salida de la memoria principal. De lo contrario,
será la memoria principal la que dé el dato.
3. Finalmente, se actualizan las direcciones y los datos contenidos en
la caché.
Existen distintas estrategias para seleccionar las direcciones que se guardan en la memoria caché de modo que se mantengan en ella las direcciones más usadas (obsérvese que el conjunto de direcciones de memoria
más utilizadas variará con la fase del programa que se esté ejecutando).
Una buena estrategia de selección puede conllevar una tasa de aciertos
(la dirección requerida está en la caché) muy elevada, de donde la velocidad aparente de la memoria se asemejará mucho a la velocidad de la
memoria caché.
La memoria virtual se desarrolla con el propósito de poder hacer uso
de más memoria de la que fı́sicamente se dispone. Si un programa es demasiado grande para la memoria disponible se solı́a dividir en módulos
que cupieran en memoria mediante la técnica del solapamiento (overlay). Esta técnica tiene el serio inconveniente de que los programas no
3.1. Componentes de un computador
67
son transportables, puesto que, en general, no funcionarı́an en un computador con menos memoria.
Para solventar estos problemas se desarrolló la memoria virtual como
un método automático para realizar el solapamiento. La idea consiste en
usar la memoria secundaria, generalmente un disco duro, como memoria principal. Un programador que dispone de memoria virtual tiene la
impresión de estar trabajando con un mapa de direcciones de memoria
(direcciones lógicas) mucho mayor del que fı́sicamente dispone (direcciones fı́sicas).
Existen otras técnicas para mejorar la utilización de la memoria como
son la paginación y la segmentación. Estas técnicas utilizan programas
de gestión de memoria que forman parte del sistema operativo; en el
capı́tulo 4 se presentarán más detalles sobre ellas.
3.1.2
Unidad central de proceso
La UCP representa el cerebro de la computadora y allı́ es donde se
procesa la información recibida, por lo que casi siempre nos referiremos
a ella como el procesador. La UCP está formada por la unidad de control
(UC), que clasifica y organiza las instrucciones recibidas (encargado), y
la unidad aritmética y lógica (UAL), que las ejecuta (donde se “amasa
y cuece” la información).
Fı́sicamente el procesador es un microchip y consta de unos circuitos
electrónicos que permiten realizar operaciones elementales con la información. El procesador se conecta con el resto de los componentes de
un computador mediante unas patillas metálicas, cada una de las cuales
transporta información binaria, a través de los buses de comunicación
que estudiaremos más adelante.
El cometido de la UC consiste en recibir la instrucción que se va a
ejecutar, determinar su tipo (cálculo aritmético, lógico, . . . ), determinar si esa instrucción necesita argumentos almacenados en la memoria,
leer (en su caso) las direcciones de memoria que contienen los argumentos de la instrucción y dar la orden correspondiente a la UAL. Por su
parte, la labor de la UAL es la de ejecutar las instrucciones aritméticas
68
Capı́tulo 3. Estructura fı́sica de un computador
y lógicas, una vez que la UC ha determinado su tipo y ha leı́do sus argumentos (si los hubiera). Las instrucciones que llegan a la UAL son
muy sencillas, y se reducen a un cálculo aritmético elemental (según
el tipo de procesador, “elemental” significará bien suma-resta o bien
suma-resta-multiplicación-división), un cálculo lógico (and, or, . . . ), o
una instrucción de salto o bifurcación.
Unidad de control
La UC se encarga de clasificar las instrucciones que recibe, controlar
su ejecución y leer las zonas de la memoria que almacenan los argumentos
de estas instrucciones. La UC está dotada de unos cuantos registros
internos de memoria que usa para almacenar datos elementales durante
la ejecución de una instrucción elemental. Esta memoria dispone de
un cierto número de registros con un cometido particular, entre los que
destacan el registro de instrucción y el contador de programa.
El registro de instrucción almacena aquélla que está siendo ejecutada
y, por su parte, el contador de programa almacena la dirección de la
siguiente instrucción que debe ser ejecutada. Existen, además, otros
registros que almacenan los resultados parciales de la ejecución de una
instrucción.
El funcionamiento de la UC está regido por los impulsos de un reloj
que sincroniza la realización de las distintas operaciones y determina la
velocidad del procesador. Su frecuencia se mide en MHz (megaherzios,
millones de ciclos por segundo).
El trabajo desempeñado por la unidad de control al ejecutar una
instrucción puede descomponerse en pequeños pasos como los descritos
a continuación:
1. Leer el contador de programa.
2. Almacenar en el registro de instrucción el contenido de la dirección
de memoria que aparece en el contador de programa.
3. Averiguar si la instrucción necesita argumentos y, en su caso, determinar sus direcciones de memoria.
3.1. Componentes de un computador
69
4. Leer los argumentos y almacenarlos en los registros internos.
5. Ordenar a la UAL que ejecute el cómputo necesario.
6. Almacenar el resultado de la ejecución.
7. Actualizar el contador de programa con la siguiente instrucción
por ejecutar.
La UC dispone de un dispositivo denominado secuenciador que efectúa esta descomposición en pasos elementales.
Unidad aritmética y lógica
La unidad aritmética y lógica es el horno donde se cuece la información; su tarea consiste en recibir instrucciones junto con sus argumentos y ejecutarlas, dando a cambio el resultado de su operación.
Esta unidad consta de un(os) operador(es) que ejecuta(n) fı́sicamente
las instrucciones recibidas, una serie de registros para almacenar información mientras se ejecuta una instrucción (entre estos registros destaca
el registro acumulador , al que se hará referencia de nuevo cuando estudiemos el direccionamiento de las instrucciones) y algunos señalizadores
de estado que indican resultados interesantes obtenidos al realizar un
cómputo (resultado cero, overflow o desbordamiento, . . . )
Los operadores son dispositivos fı́sicos (circuitos electrónicos) que
pueden realizar operaciones elementales sobre datos binarios. Las operaciones que son capaces de hacer estos dispositivos pueden ser de desplazamiento, lógicas o aritméticas.
Las operaciones de desplazamiento consisten en desplazar los bits de
una palabra varios lugares hacia la izquierda o hacia la derecha. Dependiendo de la acción del desplazamiento sobre los extremos de la palabra
podemos distinguir varios tipos de desplazamiento:
1. Desplz. lógico: si el extremo de la palabra que queda vacı́o tras el
desplazamiento se completa con ceros.
70
Capı́tulo 3. Estructura fı́sica de un computador
2. Desplz. aritmético: es similar al anterior, pero se mantiene el bit
de signo. Se utiliza para representar multiplicaciones y divisiones
de una potencia de 2.
3. Desplz. circular: los bits que quedan fuera tras el desplazamiento se
emplean en llenar los huecos libres del otro extremo de la palabra.
4. Desplz. concatenado: se desplaza conjuntamente el contenido de
dos o más registros.
Las operaciones lógicas tales como NOT, AND y OR se realizan bit
a bit. La primera de estas operaciones sólo depende de un argumento,
mientras que las restantes necesitan dos argumentos.
Las operaciones aritméticas más importantes que se realizan en la
UAL son las de suma, resta, multiplicación y división, la de cambio de
signo y la de extensión de signo. Esta última operación se hace necesaria cuando se transmite información a un elemento con mayor longitud
de palabra pues es necesario completar los bits restantes sin alterar la
información. En general las operaciones de multiplicar y dividir se hacen
usando sumas y restas mediante un algoritmo apropiado; sólo computadores muy potentes (y caros) disponen de operadores particulares que
las realicen directamente.
Se puede mejorar la capacidad de cálculo numérico de algunos procesadores añadiendo un coprocesador matemático. Los dispositivos de este
tipo complementan la UAL del procesador por otra más potente; con mayores y más numerosos registros operativos, con una representación interna de los datos de mayor precisión y con instrucciones numéricas más
complejas (funciones exponenciales, logarı́tmicas y trigonométricas).
Para ello, comparten el flujo de instrucciones y datos del procesador
y cuando detectan alguna instrucción numérica toman el control del
programa, ejecutan la instrucción, calculan el resultado y devuelven el
control al procesador.
3.1.3
Periféricos
Damos en esta sección una visión general de los periféricos. Podemos considerar periféricos de entrada, de salida y de almacenamiento;
3.1. Componentes de un computador
71
asimismo podemos distinguir entre periféricos locales y periféricos remotos, según su conexión al computador. Un periférico local, como el ratón,
se encuentra cerca de la UCP conectado mediante cables que hacen las
veces de prolongador de los buses del computador. Para un periférico
remoto, como una impresora láser del centro de cálculo, la conexión se
realiza a través de una red de comunicaciones.
A continuación se enumeran algunos de los periféricos más importantes:
De entrada de datos
1. Teclado. Es similar al teclado de una máquina de escribir y cuenta
además con algunas teclas de control.
2. Ratón. Es un dispositivo que al ser desplazado sobre una superficie
permite mover el cursor por la pantalla. Existen ratones de sistema
mecánico y de sistema óptico.
3. Sensores. Este tipo de periféricos incluye a las pantallas táctiles,
capaces de seleccionar distintas opciones reconociendo el tacto sobre distintas zonas de la pantalla. También podemos encontrar
otro tipo de sensores como
(a) Lápiz óptico. Cuando se posa en la pantalla reconoce la posición que ocupa mediante una medición de la luminosidad
que recibe.
(b) Tableta gráfica. Similar a una pizarra provista de un lápiz.
Los trazos sobre la tableta aparecen en la pantalla del computador.
4. Escáner. Permite digitalizar imágenes planas (fotografı́as o texto)
y archivarlas.
De salida de datos
1. Pantalla o monitor. Es el principal instrumento de comunicación
entre el computador y el usuario. Su constitución fı́sica es similar
72
Capı́tulo 3. Estructura fı́sica de un computador
a la del tubo de imagen de un televisor. Es usual llamar consola
al conjunto formado por un teclado y un monitor.
2. Plotter. Permite realizar gráficos de alta precisión como mapas o
diseños técnicos.
3. Impresora. Su misión es proporcionar copias impresas en papel de
la información guardada en el computador. Hay diversos tipos de
impresora, entre los que destacan las impresoras de margarita (ya
en desuso), de matriz de puntos, de chorro de tinta y las impresoras
láser.
De entrada y salida de datos
1. Módem. Es un dispositivo que permite la comunicación de un computador con otro a través de la lı́nea telefónica (red conmutada)
o a través de lı́neas destinadas exclusivamente a este fin (lı́neas
punto a punto). Para ello convierte los datos binarios en señales
moduladas de baja frecuencia. Existen diversos protocolos que determinan la forma de iniciar, efectuar y finalizar la transmisión,
ası́ como su velocidad y corrección de errores. Su nombre procede
de su doble función: MOdulador, DEModulador. Su velocidad se
mide en baudios, que equivalen aproximadamente a bits por segundo, al incluir las necesarias señales de control.
2. Red. Las redes permiten la interconexión de varios computadores
entre sı́, la utilización conjunta de distintos dispositivos externos
tales como un disco duro, una impresora, etc., y el uso compartido
de programas y ficheros de datos. Cada computador conectado a la
red contempla los distintos dispositivos disponibles como si fueran
propios. Por lo general uno de los computadores se dedica en
exclusiva a la gestión de la red, denominándose servidor de red. Las
redes pueden ser locales, cuando se ubican en la misma habitación
o edificio, o remotas. En general, tanto el sistema operativo como
los programas de aplicación son especı́ficos para el funcionamiento
en red.
3.1. Componentes de un computador
73
Periféricos de almacenamiento
Aunque se trata en realidad de periféricos de entrada y salida, suelen
estudiarse aparte. Los periféricos de almacenamiento son también conocidos como memorias secundarias y memorias auxiliares. La mayorı́a
de estos dispositivos almacenan la información de forma magnética. El
primero de todos los dispositivos de almacenamiento magnético fue la
unidad (lectora y grabadora) de cinta magnética, y posteriormente se
desarrollaron las unidades de discos fijos (también llamados discos duros) y las unidades de discos flexibles.
En una cinta magnética el acceso a la información es secuencial (tenemos que hacer correr la cinta hasta que aparezca la información que
buscamos); esto hace que sea un medio muy lento. Generalmente las
cintas magnéticas, debido a su gran capacidad, se utilizan para hacer
periódicamente copias de seguridad (backup) de la información almacenada en los discos duros del computador. Recientemente se han desarrollado los streamers, que son dispositivos cuya única finalidad es hacer
copias de seguridad de grandes volúmenes de información, generalmente
contenida en un disco duro.
Los discos magnéticos reciben este nombre por su forma y porque
su superficie es magnética (ciertamente no es un nombre muy original,
aunque sı́ autoexplicativo) y son dispositivos de acceso directo, esto es,
no tenemos que recorrer toda la información que hay delante de la que
necesitamos.
Los discos magnéticos necesitan organizarse lógicamente para poder albergar información de un modo ordenado; dar formato a un disco
magnético es dotarlo de la organización lógica necesaria para cada modelo de computador (no es lo mismo el formato del DOS, que usan los
compatibles con IBM, que el formato usado por los computadores Macintosh).
La información se almacena siguiendo cı́rculos concéntricos llamados
pistas que a su vez se dividen en sectores que contienen un cierto número
de palabras (celdas). Para indicar una dirección se especifica la pista y
el sector donde comienza la información, por lo cual una transferencia
74
Capı́tulo 3. Estructura fı́sica de un computador
de datos a un disco siempre empieza en la primera palabra de un sector.
Las operaciones necesarias para dar formato a un disco magnético son
bastante complejas y, por lo tanto, se suele dejar al sistema operativo
la gestión de todas las pequeñas tareas que hay que llevar a cabo, en el
capı́tulo 4 veremos que el sistema operativo es el software encargado de
facilitar este tipo de tareas a los usuarios del computador.
Entre los distintos tipos de disco destacan los discos duros (hard
disk ), que disponen de una gran capacidad de almacenamiento (de 20
a 800 Mb). Suelen ser fijos (no se pueden extraer del computador) y
suelen contener el sistema operativo y los programas de uso más común.
Los discos flexibles, diskettes o disquettes (en inglés, floppies), son
extraı́bles y por eso pueden ser usados para transferir información de
un computador a otro (que pueda leer discos flexibles). Estos discos
tienen una capacidad mucho menor que un disco duro (entre 360 Kb y
2’88 Mb) y el tiempo de acceso a la información almacenada es bastante
grande. Actualmente coexisten discos flexibles de dos tamaños distintos,
00
00
de 5 14 y de 3 12 (pulgadas), de similares prestaciones. Los computadores
00
00
compatibles con IBM pueden utilizar discos flexibles de 5 14 y de 3 12 ,
mientras que los computadores de la familia Macintosh usan exclusiva00
00
mente los de 3 12 . Este hecho hará que, probablemente, los discos de 5 14
acaben desapareciendo del mercado.
Últimamente se han desarrollado las unidades de discos duros extraı́bles, que tienen las ventajas de los discos duros en cuanto a capacidad
y a velocidad de acceso y además son intercambiables.
3.1.4
Buses de comunicación
Los componentes principales de un computador son la UCP, la memoria y los periféricos. Estas componentes intercambian información constantemente y, obviamente, la comunicación debe establecerse a través
de un medio fı́sico que conecte la UCP con los dispositivos E/S y con
el exterior. La comunicación entre los distintos componentes se realiza
a través de lı́neas que transportan información binaria. Este transporte
puede llevarse a cabo de dos modos:
3.1. Componentes de un computador
75
• En la comunicación en serie, la información se transmite un bit tras
otro. El ratón es un ejemplo tı́pico de periférico con comunicación
en serie.
• En la comunicación en paralelo, se transmite la información a
través de varias lı́neas simultáneamente, de modo comparable a
una autovı́a de varios carriles (lı́neas) por las que los vehı́culos
(información binaria) fluyen simultáneamente.
En la comunicación en paralelo con los periféricos hay ocho o nueve
lı́neas, y se transmite de byte en byte. Un periférico tı́picamente
comunicado en paralelo es la impresora.
Las lı́neas de comunicación se agrupan según el tipo de información
que transporten, y cada uno de estos conjuntos de lı́neas recibe el nombre
de bus. Un bus transmite la información en paralelo.
Atendiendo al tipo de información que transmiten, los buses de comunicación pueden ser de tres clases:
• Bus de direcciones, a través del cual la UC determina la dirección
de memoria o dispositivo de E/S con el que se intercambia información.
• Bus de datos, por el que viajan los datos para ser almacenados en
la memoria o para ser usada en algún cómputo.
• Bus de control, que, como su nombre indica, transporta información de control para la sincronización de todo el trabajo.
En general los buses de datos tienen un número de lı́neas igual a la
longitud de la palabra de máquina, aunque a veces sólo tienen la mitad,
lo que incide negativamente en la velocidad del computador pero suele
abaratar el precio. Si el número de celdas de memoria accesibles es 2d ,
los buses de direcciones suelen tener d lı́neas. Por último, los buses de
control tienen un número de lı́neas variable dependiendo de las distintas
marcas y modelos de procesador.
Por el bus de datos la UC recibe (el código binario de) una instrucción, la interpreta y prepara su ejecución. Dependiendo del tipo de
76
Capı́tulo 3. Estructura fı́sica de un computador
instrucción, la UC puede generar algunos códigos de control que serán
enviados a través del bus de control; en su caso, averiguará a través del
bus de direcciones en qué posición (de la memoria principal) encuentran
los argumentos de la instrucción, esta información viajará hasta la UC
por el bus de datos y, finalmente, el resultado del cómputo será transportado de nuevo a través del bus de datos hacia la memoria o hacia un
periférico.
Existen dispositivos electrónicos para el control de los buses que, en
ciertos casos, liberan a la UCP de este trabajo: son los controladores.
• Los controladores del sistema permiten el traslado del contenido
de bloques de memoria, a gran velocidad, a través del bus, con
independencia de la UCP. Se permite ası́ el acceso directo a la
memoria de los periféricos que puedan precisarlo (pantalla y discos
duros).
• Los controladores de dispositivo actúan como intermediarios entre los periféricos y los buses permitiendo la comunicación entre
la UCP y sus periféricos, dado que estos últimos no se conectan
directamente a los buses. Pueden ser especializados, como los que
controlan la pantalla o las unidades de disco, o de propósito general, bien en serie o en paralelo.
La comunicación entre la UCP y los controladores de dispositivo
se puede hacer de dos formas distintas: utilizando la propia memoria
principal o través de una memoria independiente para E/S. En el primer
caso cada controlador de dispositivo tiene asignada una dirección de
memoria. Cuando la UCP quiere leer o escribir en el dispositivo, lo
hace en la dirección que dicho dispositivo tiene asignada, utilizando las
mismas instrucciones de escritura o lectura de memoria. En el segundo
caso, el lenguaje máquina debe disponer de instrucciones especializadas
para el acceso a este área de E/S.
Los controladores de propósito general cumplen un determinado protocolo estándar de comunicaciones y disponen de los necesarios conectores en el exterior del computador. Cualquier periférico que se atenga a
dicho protocolo puede ser conectado a ellos, facilitando su utilización.
3.2. Lenguajes de máquina
77
Entre los protocolos más extendidos cabe citar el RS -232 para los
puertos en serie y el Centronics para los puertos paralelos.
3.2
Instrucciones en lenguaje de máquina
La información se representa dentro de un computador mediante
ceros y unos. Cada procesador es capaz de distinguir si recibe una instrucción o un dato de una forma que depende de su marca y su modelo.
El juego de instrucciones de un procesador recibe el nombre de lenguaje de máquina o código máquina. Una UCP sólo puede entender
instrucciones expresadas en su lenguaje de máquina, y cada instrucción
especifica una acción particular sobre algunos operandos. Una instrucción es una lista de ceros y unos: una parte de la lista es el código de la
operación que ha de realizarse, el resto determina dónde se encuentran
los argumentos de la instrucción (si los hubiera). Todo lo relacionado
con la especificación de dónde están los argumentos de la instrucción
recibe el nombre de direccionamiento. A las instrucciones de máquina
se les asignan nombres nemotécnicos, más fáciles de recordar que listas
de ceros y unos.
Estas instrucciones son muy elementales, por lo tanto es necesario
realizar un gran esfuerzo de traducción entre el lenguaje natural y el
código máquina. En el capı́tulo 5 estudiaremos la jerarquı́a de niveles
que permiten a un programador de aplicaciones escribir sus programas
en lenguajes a medio camino entre el lenguaje natural y la codificación
en binario.
Hay dos tendencias básicas en el diseño de juegos de instrucciones:
pocas instrucciones (algunas decenas) simples pero de ejecución muy
rápida o muchas instrucciones (unas 200) complejas, de ejecución algo
más lenta. La primera se conoce como RISC (del inglés, Reduced Instruction Set Computer : computador con juego de instrucciones reducido) y
la segunda como CISC (Complex Instruction Set Computer : computador con juego de instrucciones complejo).
78
3.2.1
Capı́tulo 3. Estructura fı́sica de un computador
Formato de las instrucciones
La elección del formato de las instrucciones de un procesador depende
en buena parte de las especificaciones fijadas por el equipo de diseño del
procesador y de otras consideraciones que veremos a continuación.
Entre las operaciones que se ejecutan en un procesador, algunas no
tienen operandos, otras tienen uno, dos o a lo sumo tres. En muchos
de los casos los operandos vienen expresados por sus direcciones de memoria, por lo que se suele hablar de instrucciones de una, dos o tres
direcciones.
Pueden existir instrucciones sin operando, bien porque el operando
no aparezca explı́citamente, siendo uno de los registros del procesador,
o porque la propia instrucción no lo necesite, como cuando se repite un
proceso o se regresa de una llamada a un subprograma.
En el otro extremo se sitúan las operaciones binarias, que precisan
tres direcciones para llevarse a cabo: las de sus dos argumentos y la de
dónde ha de colocarse el resultado obtenido.
Lo ideal en un juego de instrucciones es que todas tengan el mismo
formato. Adoptar, por ejemplo, un juego de instrucciones de tres direcciones es sencillo: basta con ignorar los argumentos añadidos para
igualar el formato.
También es posible elegir un juego de instrucciones con menos de tres
operandos. Las operaciones de tres argumentos se traducen entonces
como sigue (considerando una operación aritmética cualquiera):
Si el juego de instrucciones es de dos direcciones, éstas representan
a ambos argumentos, y el resultado de la ejecución se almacena en la
primera o segunda dirección suministrada.
En las instrucciones de una dirección sólo se especifica la de uno de
los argumentos. En el caso de que se trate de una instrucción binaria, se
hace necesario usar el registro acumulador que se encuentra en la UAL.
Entonces, se toma como primer argumento el contenido del acumulador,
como segundo argumento el contenido de la dirección de memoria dado
por la instrucción, y el resultado de la instrucción se almacena en el
registro acumulador (ver sección 3.3.2).
3.2. Lenguajes de máquina
3.2.2
79
Tipos de Instrucciones
Las instrucciones del juego de un procesador pueden ser divididas
según su cometido en los siguientes grupos:
1. De movimiento de datos. Este tipo de instrucciones transfieren
datos entre la memoria principal y los registros. Combinando las
distintas procedencias con los distintos destinos posibles obtenemos
bastantes tipos de instrucciones de movimiento de datos. Puede
tratarse de datos aislados, de bloques de datos o de cadenas de
caracteres.
2. Operaciones binarias. Estas instrucciones, aritméticas y lógicas,
realizan una operación con dos argumentos como, por ejemplo, las
operaciones aritméticas elementales y algunas operaciones lógicas
binarias tales como AND, OR y XOR.
3. Operaciones monarias. Entre estas instrucciones podemos encontrar las que desplazan o rotan los bits de una palabra. Algunas
operaciones binarias ocurren tan a menudo con un mismo argumento que, a veces, son incluidas como instrucciones de una sola
dirección. Por ejemplo, tenemos la instrucción de borrar el contenido de una palabra de memoria, que es un caso particular de “mover una palabra formada por ceros a la dirección suministrada”.
4. Instrucciones de salto. Sirven para alterar el orden de ejecución de
las instrucciones. Dentro de este grupo encontramos las instrucciones de salto condicional y las de salto incondicional:
La ejecución de una instrucción de salto incondicional obliga al
computador a “saltarse” el orden secuencial para ejecutar la instrucción contenida en la dirección determinada por el argumento
de la instrucción de salto, y el orden de ejecución sigue a partir de
la instrucción sobre la que se saltó.
Una instrucción de salto condicional necesita de instrucciones de
comparación ya que es necesario realizar una o varias comparaciones para comprobar la condición.
80
Capı́tulo 3. Estructura fı́sica de un computador
..
.
..
.
...
...
..
.
100
101
: 200
CALL
200
102
201
...
103
202
X
y
XXX
XX
...
104
203
... .
..
..
..
.
.
..
.
...
...
...
RET
..
.
Figura 3.2. Funcionamiento de una llamada a subprograma.
5. Llamada a un subprograma. Un subprograma no es más que un
grupo de instrucciones que realiza operaciones útiles y necesarias
en distintos puntos de un programa. Si, al ejecutar un programa, se
encuentra una instrucción de llamada a subprograma, se ejecutan
todas las instrucciones del subprograma y posteriormente se pasa
a la siguiente instrucción del programa (ver la figura 3.2).
6. Entrada y salida de datos. Es el tipo de instrucción que más cambia
de un procesador a otro. Sirven para gestionar el intercambio de
información entre el computador y el exterior.
3.3
Un ejemplo de recapitulación
En este apartado vamos a desarrollar un ejemplo explicativo de un
conjunto de instrucciones de máquina de una dirección con acumulador.
Consideraremos un tamaño de palabra de datos de 16 bits, las instrucciones se codifican con 4 bits, lo que permite un total de 16 instrucciones diferentes. Los restantes 12 bits se utilizarán para codificar las
direcciones, lo que permite direccionar 212 = 4096 posiciones de memoria. El bus de datos será de 16 bits y el de direcciones de 12 bits.
Para simplificar supondremos que el tamaño de palabra de memoria
es de 16 bits, es decir que en cada dirección de memoria se almacenan 16
3.3. Un ejemplo de recapitulación
81
bits, y que en cada operación de lectura o escritura de memoria se trabaja
con 16 bits. (En muchos sistemas el tamaño de palabra de memoria es
de 8 bits. Por ello, la formación de un dato de 16 bits requiere la lectura
de dos posiciones consecutivas de memoria empezando, por ejemplo, por
la posición par.)
3.3.1
UCP con acumulador
Como hemos visto (apartado 3.1.1), los registros son memorias de
gran velocidad utilizadas por la UCP y la memoria principal para realizar sus operaciones. Su tamaño depende del contenido que vayan a
almacenar. En nuestro caso, el registro de dirección de memoria tendrı́a
12 bits y el de intercambio de memoria 16 bits.
El contador de programa tiene que almacenar una dirección de memoria, luego tendrá 12 bits, mientras que el registro de instrucción, que
tiene que almacenar la instrucción completa, tendrá 16 bits. Además
existirá un registro acumulador, que desempeña en este caso un papel
fundamental en la ejecución de instrucciones.
Dado que muchas instrucciones operan sobre dos operandos y producen un resultado, como primer operando se toma el contenido actual
del registro acumulador y como segundo operando se toma el contenido
de la dirección que aparece en la instrucción y el resultado se almacena
nuevamente en el acumulador. Por lo tanto, en las instrucciones de dos
operandos el registro acumulador hace el doble papel de operando y de
destinatario del resultado.
Supongamos que queremos sumar el contenido de la posición de memoria 100 con el contenido de la 150 y almacenar el resultado en la 200.
En primer lugar cargamos el contenido de la posición 100 en el acumulador, a continuación llamamos a la operación suma con la dirección 150;
como veremos, esta instrucción suma al acumulador el contenido de la
dirección 150. Por último, el contenido del acumulador se almacena en
la posición 200 de la memoria.
El proceso serı́a el siguiente:
82
Capı́tulo 3. Estructura fı́sica de un computador
CARGAR
SUMAR
ALMACENAR
100
150
200
Si utilizásemos instrucciones de tres direcciones, simplemente se escribirı́a:
SUMAR 100 150 200
El lenguaje máquina se simplifica al tener una única dirección, pero las
operaciones se complican al tener que cargar y almacenar los operandos
del acumulador.
En las operaciones de cambio de signo o de complementación, solamente tenemos un operando. La operación se realiza sobre el contenido
del acumulador, donde se almacena también el resultado. La dirección
pasada como argumento no se tiene en cuenta.
En las operaciones de E/S, el contenido de una posición de memoria
se recibe o envı́a a un dispositivo externo. En este caso, no se utiliza el
registro acumulador.
3.3.2
Un juego de instrucciones de máquina de una
dirección
En la tabla 3.1 se relacionan las instrucciones de un lenguaje de
máquina de una dirección simplificado. La notación M [d] representa
el contenido de la dirección d de la memoria. La instrucción CARgar d
deposita el contenido de la posición de memoria d en el acumulador.
La instrucción ALMacenar d realiza el proceso contrario: guarda el
contenido del acumulador en la dirección de memoria d.
Las instrucciones IN d y OUT d se utilizan para E/S. La primera lee un
dato de una posición de memoria destinada a un dispositivo externo y lo
almacena en la dirección de memoria d; la segunda toma el contenido de
la posición de memoria d y lo envı́a a la dirección de memoria destinada
al dispositivo externo.3
3
Por ser este un modelo muy simplificado, no se tiene en cuenta la comunicación
directa con el dispositivo.
83
3.3. Un ejemplo de recapitulación
Instrucción
Efecto
Código de máquina
CAR d
Ac ← M [d]
0000
ALM d
M [d] ← Ac
0001
IN d
read(M [d])
0010
OUT d
write(M [d])
0011
SUM d
Ac ← Ac + M [d]
0100
RES d
Ac ← Ac – M [d]
0101
OP –
Ac ← –Ac
0110
MUL d
Ac ← Ac * M [d]
0111
DIV d
Ac ← Ac div M [d]
1000
NOT –
Ac ← not Ac
1001
AND d
Ac ← Ac and M [d]
1010
OR d
Ac ← Ac or M [d]
1011
COND d
If Ac > 0 then goto d
1100
GOTO d
goto d
1101
Fin de programa
1110
END
Tabla 3.1. Ejemplo de juego de instrucciones de una dirección
84
Capı́tulo 3. Estructura fı́sica de un computador
Las instrucciones SUMar d y REStar d, toman el contenido de la dirección de memoria d y lo suman y restan respectivamente con el contenido del acumulador, almacenando el resultado en dicho registro.
El mismo proceso pero aplicando la multiplicación o la división es
realizado por MULtiplicar d y DIVidir d.
Las instrucciones OPuesto – y NOT – producen el cambio de signo
(complemento a dos) o la complementación del contenido del acumulador. La dirección a la que se aplican no se utiliza.
Las instrucciones lógicas AND d y OR d toman el contenido de la
dirección de memoria d y del acumulador, efectúan la operación and u
or entre ambos operandos y almacenan el resultado en el acumulador.
La instrucción GOTO d da un salto incondicional y actúa con independencia del valor del acumulador.
La instrucción CONDición d, toma el valor del acumulador, comprueba
si es mayor que cero, y en caso afirmativo carga en el registro contador de
programa la dirección d. En consecuencia, la siguiente instrucción que
ejecutará el procesador será la contenida en la dirección d, produciéndose
una ruptura de la secuencia de ejecución. Si no se cumple la condición
prosigue la ejecución secuencial.
Por último, la instrucción END señala el final del programa.
3.3.3
Ejecución de una instrucción. Detalle
La ejecución de cada instrucción de máquina conlleva una serie de
pasos elementales y transferencias de datos de unos órganos a otros de
la UCP.
Estos pasos elementales se denominan microinstrucciones y son ejecutados por el secuenciador a partir del código de la instrucción de
máquina.
La ejecución de una instrucción comienza cuando se actualiza el registro contador de programa. La UC envı́a esta dirección a los circuitos
de selección de memoria a través del bus de direcciones y la señal de
3.3. Un ejemplo de recapitulación
85
lectura a través del bus de control. La dirección queda almacenada en
el registro de dirección de memoria y al recibir la señal de lectura, se
lee la instrucción. La instrucción se envı́a a través del bus de datos y se
recibe en el registro de instrucción de la UC. De esta forma, la UC tiene
disponible la instrucción para ser decodificada y ejecutada.
Supongamos que la instrucción para ejecutar sea:
SUM 1000(10
equivalente en binario a:
0100
001111101000
La UC separa el código de operación (0100) de la dirección del operando
(001111101000) y, a partir del código, genera las señales de control para
enviar la dirección, a través del bus de direcciones, al registro de dirección de la MP, efectuar la operación de lectura y, finalmente, enviar
el contenido de la dirección 1000 a un registro operativo de la UAL, a
través del bus de datos.
A continuación se envı́a la señal de control correspondiente a la suma
a la UAL, quien suma al contenido del acumulador el valor del registro
operativo, quedando el resultado almacenado en el acumulador.
3.3.4
Traducción y ejecución de un programa sencillo
Vamos a desarrollar un fragmento de programa para elevar un número
n a una cierta potencia a ∈ IN. El programa devolverá el valor 1 si a es
cero y na si es a > 0.
Tenemos que reservar un espacio de almacenamiento para los datos,
resultados y constantes. Llamaremos n a la base, a al exponente y r al
resultado. Usaremos una posición adicional de memoria para almacenar
la constante 1 que usaremos para decrementar la potencia.
La descripción del proceso serı́a la siguiente:
86
Capı́tulo 3. Estructura fı́sica de un computador
Datos
n
a
r
1
Dirección
d1
d2
d3
d4
d5
(entrada)
d6
d7
Contenido
n
a
r
1
multiplicar r por n
decrementar a
si a > 0 ir a la dirección d5
ir a la dirección d7
asignar a r el valor 1
si a > 0 ir a la dirección d5
continuar programa
La entrada del proceso es la dirección d6.
Para traducirlo a lenguaje máquina tenemos que fijar una dirección
inicial, por ejemplo la 100, y convertir cada instrucción en sus equivalentes, utilizando el acumulador:
Dirección
Contenido
100:
n
101:
a
102:
r
103:
1
104:
CAR 102
105:
MUL 100
106:
ALM 102
107:
CAR 101
108:
RES 103
109:
ALM 101
110:
COND 104
111:
GOTO 116
112:
CAR 103
113:
ALM 102
114:
CAR 101
(pasa a la página siguiente)
87
3.3. Un ejemplo de recapitulación
(viene de la página anterior)
Dirección
115:
116:
Contenido
COND 104
Continuar programa.
El programa comienza a ejecutarse a partir de la dirección 112, realizando la comparación a > 0. Veamos un ejemplo de ejecución del
programa para los valores n = 5 y a = 0:
Dirección
Instrucción
Acum.
112:
113:
114:
115:
116:
CAR 103
ALM 102
CAR 101
COND 104
Continuar programa
1
a (101)
0
r (102)
?
1
0
Veamos otro ejemplo con n = 5 y a = 3:
Dirección
112:
113:
114:
115:
104:
105:
106:
107:
108:
109:
110:
104:
105:
Instrucción
CAR
ALM
CAR
COND
CAR
MUL
ALM
CAR
RES
ALM
COND
CAR
MUL
103
102
101
104
102
100
102
101
103
101
104
102
100
Acum.
a (101)
3
r (102)
?
1
1
3
1
5
5
3
2
2
5
25
(pasa a la página siguiente)
88
Capı́tulo 3. Estructura fı́sica de un computador
(viene de la página anterior)
Dirección
106:
107:
108:
109:
110:
104:
105:
106:
107:
108:
109:
110:
111:
116:
Instrucción
ALM 102
CAR 101
RES 103
ALM 101
COND 104
CAR 102
MUL 100
ALM 102
CAR 101
RES 103
ALM 101
COND 104
GOTO 116
Continuar programa.
Acum.
a (101)
r (102)
25
2
1
1
25
125
125
1
0
0
El resultado, 125, queda almacenado en la dirección 102.
3.4
Observaciones complementarias
El conjunto de instrucciones de máquina presentado como ejemplo
está muy simplificado. Los lenguajes de máquina reales pueden tener
hasta cientos de instrucciones, la mayorı́a de ellas con distintas modalidades de direccionamiento.
Los procesadores disponen también de numerosos registros operativos auxiliares, que se utilizan en la ejecución de las instrucciones y en la
formación de las direcciones sobre las que se opera.
Para tener una panorámica más amplia de los lenguajes de máquina
conviene conocer los distintos modos de direccionamiento y las instrucciones para la creación de subprogramas.
También son interesantes las instrucciones del tratamiento de las
operaciones de E/S y de las situaciones de error o desbordamiento.
3.4. Observaciones complementarias
3.4.1
89
Tipos de direccionamiento
Cada procesador dispone de unas reglas precisas y determinadas para
la definición de las direcciones o registros donde se encuentran los datos.
Estas reglas constituyen los modos de direccionamiento del procesador
y pueden llegar a ser bastante complejas. Un procesador puede tener
decenas de modos de direccionamiento diferentes, en los que participan
registros especializados.
Se llama dirección absoluta al valor numérico que cada posición de
memoria tiene asignado y por el cual se accede a ella. En general, la
dirección contenida en las instrucciones de lenguaje máquina no es la dirección absoluta, sino que ésta se forma desplazando una cierta dirección
llamada dirección de base, contenida en un registro especializado.
Se llama dirección efectiva a la dirección desde la cual, una vez realizadas las necesarias operaciones sobre la dirección contenida en la instrucción, se toman los datos.
Un registro puede contener un dato para operar con él, pero también
puede contener una dirección donde se encuentre el dato. (En los ejemplos siguientes supondremos un lenguaje máquina de dos direcciones.)
• Direccionamiento inmediato
El direccionamiento inmediato consiste en incorporar el dato constante a la instrucción. En realidad no es un direccionamiento propiamente dicho, puesto que se dispone del dato:
CAR AX, 500
Esta instrucción carga el valor constante 500 en el registro acumulador.
• Direccionamiento directo
La dirección contenida en la instrucción es la dirección de memoria
de donde se debe obtener el dato. La instrucción:
CAR AX, [500]
90
Capı́tulo 3. Estructura fı́sica de un computador
carga en el acumulador el contenido de la dirección de memoria
500. Si la dirección es la absoluta se denomina direccionamiento
absoluto.
• Direccionamiento relativo
En el caso del direccionamiento relativo, la instrucción no contiene
una dirección sino un valor de desplazamiento que se aplica a una
dirección de referencia contenida normalmente en un registro, en
una pila o en el contador de programa. La instrucción:
CAR AX, [BX + 4]
carga en el acumulador el contenido de la dirección obtenida al
sumar 4 al contenido del registro BX.
• Direccionamiento indirecto
En el direccionamiento indirecto la dirección contenida en la instrucción contiene la dirección en que se encuentra el operando. La
instrucción:
CARI AX, [500]
carga en el acumulador el contenido de la posición de memoria
cuya dirección se encuentra en la dirección 500.
• Direccionamiento implı́cito
En este caso se hace referencia a un registro que, por quedar sobreentendido, no se menciona en la instrucción.
En nuestro ejemplo de lenguaje máquina (ver 3.3.2) se sobreentiende que las operaciones se realizan y almacenan en el registro
acumulador. En consecuencia, el direccionamiento de este registro
queda implı́cito.
El siguiente cuadro resume los tipos de direccionamiento descritos:
3.4. Observaciones complementarias
91
Inmediato
Directo
Absoluto
al contador de programa
Direccionamiento
Relativo a un registro
a pila
Indirecto
Implı́cito (con acumulador)
3.4.2
Subrutinas
Pilas
Las pilas son estructuras secuenciales de datos cuyo acceso se realiza
por un extremo. Es semejante a la acción de apilar una serie de libros
sobre una mesa: se puede poner un libro sobre la pila o quitar el del
extremo superior o cima, pero no insertar ni sacar libros intermedios;
para acceder a uno de los libros de la parte inferior hay que retirar
previamente los anteriores. Se dice que estas estructuras son de tipo
LIFO (Last In First Out: último en entrar primero en salir).
La mayorı́a de los procesadores disponen de una pila para almacenar
ordenadamente ciertos valores y operaciones. Sobre una pila se definen
dos operaciones básicas: meter y sacar datos. Para su funcionamiento
se utiliza un puntero que señala a la cima de la pila. Para meter un
dato en la pila se decrementa el valor del puntero para que apunte a una
posición sobre la actual, y a continuación, se transfiere el dato a esta
posición. Para sacar el dato, se envı́a su valor y después se incrementa
el valor del puntero. De esta forma la posición anteriormente ocupada
queda liberada.
Estas operaciones suelen expresarse por sus mnemotécnicos en inglés:
PUSH d y POP d. La primera introduce el valor contenido en la dirección d
en la pila, y la segunda saca el valor del extremo de la pila y lo deposita
en la dirección d.
92
Capı́tulo 3. Estructura fı́sica de un computador
..
.
..
.
cima
...
..
.
Puntero de pila
..
.
base
..
.
..
.
Figura 3.3. Una pila y el puntero de pila.
..
.
100
101
???
XXX
..
.
..
.
← p.p.
PUSH d
..
.
d
..
.
d
..
.
← p.p.
YYY
XXX
100
101
..
.
YYY
..
.
-
..
.
..
.
YYY
..
.
Figura 3.4. Interpretación gráfica de la orden PUSH.
..
.
93
3.4. Observaciones complementarias
..
.
..
.
← p.p.
YYY
XXX
99
100
101
..
.
POP d
..
.
d
YYY
XXX
99
100
101
..
.
..
.
d
???
..
.
-
..
.
..
.
← p.p.
..
.
YYY
..
.
..
.
Figura 3.5. Interpretación gráfica de la orden POP.
Llamadas a subrutinas
Un subprograma es un conjunto de instrucciones que realizan una
acción concreta que se puede repetir varias veces a lo largo del programa, como hemos visto en el ejemplo del apartado 3.3.4. En vez de
repetir la codificación de las instrucciones cada vez que se necesiten,
éstas se codifican una única vez, formando un subprograma o subrutina,
y se le llama desde los distintos puntos del programa. Los lenguajes
de máquina disponen de instrucciones para realizar las llamadas a subprograma, consiguiéndose ası́ una estructura modular con un programa
principal que llama a sus respectivos módulos cuando lo necesita.
La instrucción de llamada va acompañada de la dirección de entrada
del subprograma:
CALL d
Esta instrucción llama al subprograma situado en la dirección d. Para
ello, la carga en el registro contador de programa, en forma semejante a
las instrucciones de salto COND o GOTO.
Sin embargo, una vez que el subprograma haya sido ejecutado, hay
que volver al programa principal, por lo que se hace necesario conocer
94
Capı́tulo 3. Estructura fı́sica de un computador
y almacenar la dirección de retorno, normalmente la dirección siguiente
a la de la llamada al subprograma, en el programa principal. Esta dirección se suele almacenar en la pila.
En consecuencia, antes de producirse un salto a un subprograma, la
instrucción de llamada debe almacenar la dirección de retorno al programa principal, que es la dirección siguiente a la de llamada, en la pila.
Cuando se llega a la última instrucción del subprograma el procesador
saca la dirección de retorno de la pila y la carga en el registro contador
de programa, con lo cual prosigue la ejecución del programa principal.
Los subprogramas deben terminar en una instrucción que indique al
procesador que debe volver al programa principal. Suele expresarse con
el mnemotécnico:
RET
que indica el RETorno desde un subprograma.
3.4.3
Interrupciones
El trabajo del procesador puede verse interrumpido por distintos
motivos; operaciones de E/S, errores, paradas para depuración, etc.
Una interrupción del procesador es similar a lo que sucede cuando
estamos leyendo un libro y suena el teléfono: el dispositivo externo,
el teléfono, avisa de su disposición a realizar una operación de E/S; el
procesador, el lector, almacena su estado de proceso (se fija en la página
y el lugar de la página donde se encuentra leyendo), y pasa a ejecutar un
subprograma de servicio de la llamada telefónica (responde al teléfono,
toma notas, etc., y por último cuelga). A continuación el procesador
reanuda su estado anterior a la llamada y prosigue con su proceso (el
lector toma el libro, busca la página y continúa con su lectura).
Las interrupciones pueden programarse (interrupciones de software)
mediante las correspondientes instrucciones de máquina, o pueden producirse por los controladores del sistema y de dispositivos, a través del
bus de control (interrupciones de hardware).
3.5. Otras arquitecturas
95
Se puede establecer una jerarquı́a de interrupciones dependiente de
su prioridad; ciertas interrupciones deben ser atendidas de inmediato,
incluso deteniendo otras interrupciones en curso de ejecución.
Cada tipo de interrupción determina la llamada a un subprograma
de servicio, que contiene las instrucciones necesarias para atender la
interrupción. Antes de atender la interrupción, el procesador almacena el
contenido de los registros, generalmente en una estructura de tipo pila. A
continuación se ejecuta el subprograma, de forma similar a las llamadas
de subprogramas (subrutinas). Una vez atendida la interrupción, el
procesador recupera los contenidos de sus registros de la pila y prosigue
la ejecución del programa principal.
Para el tratamiento de las interrupciones los lenguajes de máquina
suelen disponer de instrucciones especı́ficas, que en forma nemotécnica
suelen expresarse como:
INT t
IRET
La primera genera una INTerrupción de tipo t, y entre otras acciones
llama al subprograma de servicio t. La segunda marca el fin de dicho
subprograma y provoca el retorno de la interrupción.
3.5
Otras arquitecturas
En los últimos años se ha introducido una gran variedad de nuevas arquitecturas de computadores, especialmente orientados al procesamiento
en paralelo, esto es, con capacidad para realizar varias operaciones simultáneamente. Este modo de funcionamiento contrasta con el procesamiento secuencial, en que las instrucciones se ejecutan una tras otra.
Actualmente, la mayorı́a de los computadores incorpora algunas caracterı́sticas paralelas a bajo nivel sin que por eso puedan ser llamados
con propiedad computadores paralelos. Éstos disponen en general de
varios procesadores o Unidades de Procesamiento (UP).
En esta sección se presentan, muy brevemente, algunos esquemas
básicos que siguen las distintas arquitecturas paralelas existentes en la
96
Capı́tulo 3. Estructura fı́sica de un computador
actualidad. Principalmente, estos modelos se diferencian entre sı́ en
que las distintas UP pueden estar dotadas con una memoria local o no,
compartir o no una memoria y operar sincrónicamente o no. De modo
muy general los computadores paralelos pueden clasificarse en alguna de
las tres clases siguientes:
1. Arquitecturas sincrónicas. Este tipo de computadores se caracteriza por realizar paralelamente operaciones coordinadas por un
reloj, una UCP o un controlador vectorial globales; a su vez pueden
clasificarse en algunos de los tipos siguientes:
- Procesadores Vectoriales. Caracterizados por tener varias
unidades aritmético-lógicas encadenadas, que permiten realizar cálculos aritméticos y lógicos tanto con vectores como con
escalares.
- Arquitecturas SIMD. Esta denominación (del inglés Single
Instruction Multiple Data) caracteriza a aquellos computadores con una unidad central, varios procesadores y una red
que permite la comunicación entre procesadores e intercambio
de datos con la memoria. Esta red de interconexión permite
que el resultado obtenido por un procesador sea comunicado
a otro procesador que lo necesite como argumento.
2. Arquitecturas MIMD. Este tipo de arquitecturas (del inglés Multiple Instructions Multiple Data) emplea varios procesadores que
pueden ejecutar, de forma ası́ncrona, programas independientes
que usan datos locales. Por lo tanto, los computadores MIMD son
especialmente útiles cuando el paralelismo de la solución buscada
requiere que los procesadores trabajen de manera esencialmente
autónoma.
Las arquitecturas MIMD pueden clasificarse, a su vez, dependiendo
del modelo de memoria que utilicen.
- De Memoria Compartida. Las arquitecturas de memoria compartida consiguen la coordinación entre los distintos procesadores mediante una memoria global, compartida. Es interesante observar que en este tipo de computadores se unen
3.5. Otras arquitecturas
97
varios procesadores de propósito general que comparten una
memoria global, en lugar de varias UCPs con su propia gestión
de periféricos de entrada y salida.
- De Memoria Distribuida. Las arquitecturas de memoria distribuida conectan los nodos (un procesador autónomo junto
con su memoria local) mediante una red de interconexión
entre los procesadores. Los nodos comparten datos explı́citamente pasándose mensajes a través de la red de interconexión, ya que no hay memoria compartida.
Se han propuesto varias topologı́as de interconexión para arquitecturas de memoria distribuida. Entre ellas se encuentran
las topologı́as en anillo, en red, en árbol y las topologı́as hipercúbicas.
3. Arquitecturas basadas en el paradigma MIMD. Por último, podemos encontrar un tercer grupo de arquitecturas que no encajan
en los dos grandes grupos anteriores. Esta clase de computadores
están basados en el principio de asincronı́a y manipulación paralela
de múltiples instrucciones y datos; sin embargo, cada una de las
siguientes arquitecturas tienen alguna caracterı́stica propia que la
separa de una máquina MIMD.
- Hı́bridos SIMD-MIMD. Ésta es una arquitectura experimental en la que se permite que partes de una arquitectura MIMD
puedan ser controladas de modo SIMD.
- De Flujo de Datos. La caracterı́stica fundamental de las arquitecturas de flujo de datos es su paradigma de ejecución, en
el que una instrucción se ejecuta tan pronto como sus operandos están disponibles. De este modo, la secuencia de instrucciones ejecutadas está basada en la dependencia de los datos,
permitiéndose ası́ explotar la concurrencia en los niveles de
tarea, rutina e instrucción.
- Dirigidas por la demanda (demand-driven). Este tipo de arquitecturas, también llamadas de reducción, utilizan un paradigma de ejecución en el que una instrucción se manda ejecutar sólo cuando sus resultados se necesitan como operandos
98
Capı́tulo 3. Estructura fı́sica de un computador
para otra instrucción que se está ejecutando; este paradigma
se conoce también como evaluación perezosa (del inglés lazy),
ya que se ejecutan sólo las instrucciones estrictamente necesarias para la evaluación pedida.
3.6
Ejercicios
1. Determine el número de lı́neas de los buses de datos y direcciones precisos
en un ordenador con:
(a) una memoria de 64 K palabras de 1 byte, y
(b) una memoria de 16 Mb, en palabras de 2 bytes.
2. Dado un tamaño de palabra de memoria de 2 bytes y un bus de direcciones de 20 lı́neas, calcule el tamaño de memoria direccionable.
3. A partir de los datos de un modelo de computador concreto, extraiga los
valores de las siguientes magnitudes, o indique sus caracterı́sticas:
(a) Tamaño de la memoria principal.
(b) Número de lı́neas del bus de direcciones y de datos.
(c) Tipos de memorias utilizadas (ROM, RAM, . . . ), y su velocidad de
acceso.
(d) Tamaño de memoria caché.
(e) Velocidad de reloj.
(f) Tipo de coprocesador.
(g) Número de controladores en serie y en paralelo.
(h) Unidades de disco: tipos, capacidad y velocidad de acceso.
(i) Otros periféricos disponibles.
4. Desarrolle un programa en lenguaje de máquina (usando instrucciones
mnemotécnicas) para sumar los 10 primeros números naturales.
5. Desarrolle un programa en lenguaje máquina que copie el contenido de
las posiciones 1000 a 1010 de memoria en las 2000 a 2010.
6. Amplı́e el juego de instrucciones con POP y PUSH para desarrollar un
programa en lenguaje máquina que copie el contenido de las direcciones
de memoria 1000 a 1010 en la pila, y desde la pila en las direcciones 2000
a 2010.
3.7. Comentarios bibliográficos
99
7. Amplı́e el juego de instrucciones con CALL y RET para desarrollar un un
subprograma en lenguaje máquina que, al ser llamado, sustituya el valor
almacenado en el acumulador por su opuesto.
8. Con el juego de instrucciones del ejercicio anterior, escriba un subprograma en lenguaje máquina que, al ser llamado, sustituya los valores
almacenados en las posiciones de memoria 1000 a 1010 por sus opuestos.
9. Escriba un programa en lenguaje máquina que genere un ciclo infinito.
10. Escriba un programa en lenguaje máquina que escriba copias de sı́ mismo
en la memoria disponible.
3.7
Comentarios bibliográficos
• Este capı́tulo resume, enormemente, un área vastı́sima de la informática.
Por consiguiente, sólo puede constituir una introducción sin pretensiones
de algunos conceptos básicos útiles sobre la estructura fı́sica de los computadores digitales, y de la coordinación entre éstos y el soporte lógico,
al más bajo nivel, que es el de la máquina.
• En [PLT89] puede encontrarse un enfoque muy didáctico de este tema,
presentado junto con la descripción de un modelo real, el ODE (Ordenador Didáctico Elemental), desarrollado por los autores.
• El texto [Mei73] es una obra clásica sobre los contenidos de este capı́tulo,
que ha servido para la formación de muchas generaciones de técnicos
en computación, por lo que su referencia es obligada. Se advierte, sin
embargo, que no se trata de un mero texto introductorio, aunque su clara
presentación facilita un buen número de conceptos que, por sı́ mismos,
no son sencillos.
• En [MW84] puede verse cómo se concretan muchos de los contenidos
presentados en este tema en dos procesadores concretos, el 8088 y el
8086.
• En [FM87] se presenta brevemente una visión panorámica bastante amena sobre las nuevas arquitecturas de computadores. Un enfoque más
técnico puede hallarse nuevamente en el último capı́tulo de [Mei73].