Control de temperatura de un centro de cómputo Temperature
Anuncio

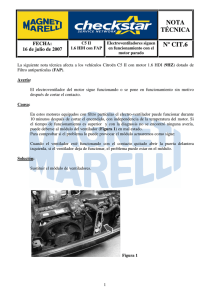
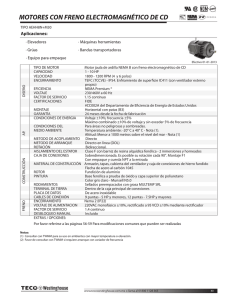
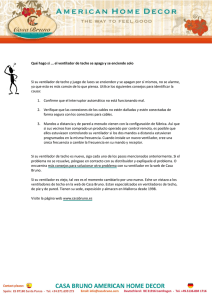
Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Control de temperatura de un centro de cómputo Temperature control of a computing center Rafael Villela Varela Aurelio Beltrán Telles Remberto Sandoval Aréchiga Miguel Eduardo González Elías Claudia Reyes Rivas Julio C. Delgado López Jacobo Montoya Becerra Oscar A. Sandoval Rodríguez Unidad Académica de Ingeniería Eléctrica Universidad Autónoma de Zacatecas E–mail: [email protected]. Resumen En un centro de cómputo se produce calentamiento debido al funcionamiento de las computadoras, lo que puede provocar fallas en el equipo electrónico y malestar e incomodidad en las personas que ahí se encuentren. Para evitar tales problemas se propone en este trabajo de investigación disminuir el calentamiento mediante el uso de ventiladores. A cada ventilador se le aplicará un voltaje proporcional al grado de enfriamiento requerido. Entre más se aleje del valor deseado la temperatura del recinto, mayor será el voltaje aplicado al motor de cada ventilador, de manera que la velocidad del motor dependerá de la cantidad de enfriamiento necesario. El nivel de temperatura se mide con un sensor LM35 que entrega 10 milivolts por cada grado centígrado; este voltaje es enviado a un Controlador Lógico Programable (PLC) que ejecuta un control PID (Proporcional, Integrador y Derivativo) que envía hacia el motor el voltaje indispensable para que gire a la velocidad requerida que mantenga la temperatura en el nivel deseado. Con este sistema se logra una reducción gradual de la temperatura hasta alcanzar el nivel propuesto, el cual es seleccionado por el usuario mediante un reóstato. Así se alcanzará una mayor eficiencia en el uso de la energía eléctrica en cada ventilador, ya que sólo se activará cuando sea necesario y se le entregará únicamente la energía requerida para la velocidad determinada por el control PID. Palabras clave: controladores lógicos programables, control de temperatura, control PID, sensor de temperatura. 1 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Abstract In a computing center is generated heat due to the computers working, which can provoke failures in the electronic equipment and discomfort in the people working there. To avoid these problems it is proposed in this research to decrease the heat by using fans. To each fan will be applied a certain voltage proportional to the required cooling degree. As the temperature of the room increases more than the desired temperature, a higher voltage will be applied to the fan motor, so the motor speed will depend on the necessary cooling degree. The temperature level is measured with a LM35 sensor which delivers 10 mV for each centigrade degree; this voltage is sent to a Programmable Logic Controller (PLC) which executes a PID Control (Proportional, Integrating and Derivative) that sends to the motor the necessary voltage to work at the required speed to keep the temperature at the desired level. The PID temperature control was found experimental and analytically. With this system is accomplished a gradual reduction until the desired level is reached, which is selected by the user with a rheostat. It is accomplished a higher efficiency in the use of electric energy in each fan, since it will only be activated when necessary and it will be delivered only the required energy for the speed determined by the PID Control. Keywords: programmable logic controllers, temperature control, PID control, temperature sensor. 2 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Introducción Para disminuir el calentamiento en un recinto se pueden usar ventiladores y sistemas de aire acondicionado. Desde el punto de vista económico es más conveniente utilizar ventiladores, ya que son de menor costo y emplean menos energía eléctrica que los sistemas de aire acondicionado, además se instalan más fácilmente. Por lo general, los ventiladores enfrían el ambiente de una habitación a través de un sistema manual de encendido/apagado. Esto no es muy eficiente puesto que los ventiladores mantendrán su máxima velocidad. No es recomendable que un ventilador siempre esté funcionando, porque consumiría permanentemente el mismo nivel de energía eléctrica aun en los momentos en que no se requiera que funcione a su máxima velocidad. Se puede lograr un ahorro considerable de energía si sólo se le entrega a un ventilador el nivel de energía preciso para que gire a la velocidad adecuada al nivel de enfriamiento necesario. El objetivo de esta investigación fue diseñar y construir un sistema capaz de mantener la temperatura de un centro de cómputo en un valor seleccionado por el usuario. El sistema debe ser sencillo, económico, eficiente, de fácil operación y con pocos requerimientos de mantenimiento. Para ello se usó un PLC S7–200 de Siemens como dispositivo de control. Materiales y métodos Descripción del sistema Se construyó una maqueta para el diseño y las pruebas del sistema. Se simuló el calentamiento producido por una computadora con una lámpara incandescente; en total se utilizaron seis lámparas de 12 watts cada una. También se agregó un ventilador con un voltaje nominal de 24 volts de corriente directa (CD), y un sensor de temperatura LM35. Cabe mencionar que el motor contaba con tacogenerador para convertir la velocidad en pulsos digitales de determinada frecuencia. 3 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 En la Figura 1 se muestran las partes principales del sistema de control. La temperatura del recinto es detectada por el sensor LM35 que entrega un voltaje entre 0 y 1 volt de CD en el rango de 0–100 ºC («National Semiconductor Corporation», 2007); este voltaje analógico es amplificado diez veces en la etapa de acondicionamiento (Figura 2) para quedar en el rango de 0–10 volts y es aplicado a una entrada analógica del PLC. Tal voltaje es proporcional al nivel de temperatura existente en el recinto, de igual modo puede leerse el correspondiente al valor deseado de temperatura, el cual es seleccionado por el operador del sistema desde un reóstato (Figura 3). Este voltaje debe estar en el rango de 0–10 volts. El programa utiliza las lecturas de dichos voltajes para determinar la velocidad del motor del ventilador en el rango de 0–100%, y entrega la correspondiente señal de salida analógica de voltaje en el rango de 0–10 volts que se aplica a la etapa de potencia del motor de la Figura 4 («Datasheet Catalog», 2007). Misma que proporciona un voltaje de 0–24 volts al motor, y su velocidad será proporcional al nivel de enfriamiento requerido. Al girar las aspas del ventilador se enfría el ambiente del recinto y esto afecta a la lectura del sensor de temperatura, repitiéndose el ciclo de control permanentemente. Los voltajes analógicos del sensor de temperatura y del valor deseado de temperatura están en el rango de 0–10 volts y son aplicados al módulo de entradas analógicas del PLC que los digitaliza en el rango de 0–32000 («Manual del PLC S7–200», 2000). El valor de cada lectura debe ser normalizado por el programa para que quede en el rango de 0 a 1 y pueda ser utilizado en la rutina PID. En forma similar, el programa determina la velocidad del motor en el rango de 0 a 1, siendo 1 la velocidad máxima, y este valor debe ser desnormalizado para que esté en el rango de 0–32000 que en el módulo de salida analógica del PLC corresponde a un voltaje de 0–10 volts que es enviado hacia la etapa de potencia. 4 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Figura 1. Diagrama esquemático del sistema de control de temperatura Figura 2. Amplificador del sensor de temperatura LM35. 5 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Modelado del sistema Una vez construida la maqueta se procedió a obtener el modelo matemático del sistema que consiste en una ecuación que represente su comportamiento. Para determinar el modelo matemático fue necesario analizar la parte eléctrica y mecánica de dicho sistema (Castro Chaírez y Carreón Gaytán, 2003). + 11 V Rx R1 100 ohms 1K +V Voltaje analógico hacia el PLC Figura 3. Reóstato para el valor deseado de temperatura Figura 4. Etapa de potencia del motor 6 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 El comportamiento del sistema es representado por la ecuación siguiente: y (t ) = −V1 d f 1 − e − bt ) + ya + V2 (1 − e − gt ) ( b g Donde: • y (t ) es la respuesta del sistema (temperatura alcanzada en el recinto en el tiempo t ) • V1 es el voltaje escalón aplicado al circuito del ventilador (12 volts de CD) • V2 es el voltaje escalón aplicado al circuito de las lámparas (127 volts de CA) • b y d son los parámetros del modelo del ventilador • f y g son los parámetros del modelo de las lámparas (calefactores) • el comportamiento del enfriamiento provocado por el ventilador se representa como: −V1 • d 1 − e − bt ) ( b el comportamiento del calentamiento provocado por las fuentes de calor (lámparas en la maqueta, computadoras en el caso real) se representa como: V2 • f 1 − e − gt ) ( g ya es la temperatura ambiente 7 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Para la parte experimental del modelado se obtuvieron tres gráficas de la respuesta de temperatura del sistema, utilizando la tarjeta procesadora de señales TM320LF2407 de Texas Instruments y el programa VisSim. Las pruebas fueron: 1. El calentamiento que ocasionan las fuentes de calor 2. El enfriamiento con el ventilador una vez que se alcanzó 29 ºC 3. El comportamiento de ambos factores juntos: las fuentes de calor y el ventilador En la primera prueba del modelado se analizó el calentamiento que ocasionan las fuentes de calor sin usar el ventilador. Se aplicó un voltaje escalón de 127 volts de C.A. En la Figura 5 se observa que la temperatura de estado estacionario fue de 27.096 ºC en 1132.69 segundos. Mientras que en la gráfica de la Figura 6 se determinó que el sistema necesitó un tiempo de 293.71 segundos para que la temperatura alcanzara el 63.3 % de su valor final (26.08 ºC). Figura 5. Temperatura estacionaria para las fuentes de calor, sin usar ventilador 8 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Figura 6. Tiempo para que la temperatura alcanzara el 63.3 % de su valor final en la prueba 1 del modelado. El modelo de la respuesta de los calefactores es: w( s ) = f s+g Donde: g= 1 tb y f = T final g V2 Siendo tb el tiempo necesario para que la temperatura alcance el 63.3 % de su valor final T final . Entonces: tb = 293.87 ; g = 0.003402 y f = 0.0007263 Y el modelo matemático de los calefactores queda como: 9 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 W ( s) = 0.0007263 s + 0.003402 En la segunda prueba del modelado se analizó la respuesta de enfriamiento del ventilador. Una vez que se alcanzó una temperatura de 29 ºC con los focos encendidos, se apagaron éstos y se encendió el ventilador, usando un voltaje escalón de 12 volts de CD. El sistema de enfriamiento del ventilador estabilizó la temperatura en 25.066 ºC en un tiempo de 604.669 segundos. El tiempo en que la temperatura alcanzó el 63.3 % de su valor final fue 91.963 segundos. Parecido al cálculo realizado en la prueba 1, se obtuvo el modelo de enfriamiento del ventilador: W (s) = 0.03466 s + 0.01666 En la tercera prueba del modelado se encendieron los calefactores hasta alcanzarse una temperatura de 29 ºC y después se activó el ventilador sin apagar los calefactores. En esta última prueba se alcanzó una temperatura estacionaria de 26.644 ºC en un tiempo de 1119.843 segundos, y en un tiempo de 27.4793 segundos se logró que la temperatura llegara al 63.3 % de su valor final. En forma similar al cálculo realizado en la prueba 1, se obtuvo el modelo del sistema completo: W (s) = 0.048186 s + 0.02047 Controlador PID Un controlador P (Proporcional) entrega una señal de salida proporcional al error o diferencia entre el valor deseado de temperatura y el valor medido; es de respuesta rápida y da estabilidad al sistema pero no puede alcanzar el valor deseado. Un controlador I (Integral) entrega una señal de salida proporcional al error acumulado, ya que integra la señal de error y así obtiene información del comportamiento del sistema a lo largo del proceso, y la respuesta no sólo 10 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 depende del valor instantáneo del error como en el controlador P; es un modo lento de control pero obliga al sistema a llegar al valor deseado. Un controlador D (Derivativo) retarda la respuesta del sistema produciendo una respuesta suave; la salida de este controlador es proporcional a la velocidad de cambio en la medición del error (Ortega Cárdenas, 1993). Un controlador PI (Proporcional e Integral) es una combinación de los controles Proporcional e Integral que elimina al error que el control Proporcional en muchos sistemas no puede corregir. Un controlador PID (Proporcional, Integral y Derivativo) combina los tres tipos de controladores y ofrece muchas alternativas de ajuste en la respuesta del sistema (Kuo, 2001). Como el modelo del sistema de este proyecto es de primer orden, no existe parte derivativa y por lo tanto se utilizó un controlador PI para el control de temperatura (Cabrera Villalobos, 1998). Con base en el diagrama de lazo cerrado con un controlador PI (Figura 7) y el modelo matemático de la planta o sistema, se consiguió la función de transferencia general: 0.048186 K p s + 0.048186 K i W (s) = 2 Wd ( s ) s + ( 0.02047 + 0.048186 K p ) s + 0.048186 K i Figura 7. Diagrama de bloques del sistema controlado Para calcular las ganancias proporcionales ( K p ) e integral ( K i ) se aplicó el método denominado «cancelación de polos» (Ogata, 1998), obteniéndose: 11 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 K p = 0.110682 y K i = 0.002266 En la Figura 8 se muestra el diagrama de bloques del sistema de control completo, con las ganancias proporcional e integral, y con los modelos matemáticos de las fuentes de calor y del ventilador. Figura 8. Controlador PI con el modelo completo Programa en el PLC El PLC se puede programar en lenguaje escalera o KOP. El programa se realizó para tener un controlador PI de temperatura. El programa consta de: • Una interrupción que se encarga de leer a la temperatura del recinto y al valor deseado de temperatura, además manda llamar a la rutina PID y envía el valor de la señal analógica de salida hacia la etapa de potencia del motor del ventilador. También realiza el paro del proceso de control de temperatura cuando así lo indique el usuario. • Una subrutina que carga los valores de las ganancias del controlador PI y controla a la interrupción (Grey, 2006). • Un bloque principal que manda llamar a la subrutina. Para ilustrar la manera en que se hace un programa en lenguaje KOP en el PLC, en la Figura 9 se muestra una parte del programa que corresponde al bloque de la interrupción. 12 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 En el segmento o network 1 comienza el proceso de control cuando el usuario oprime el botón de inicio, y en el segmento 2 se activa un temporizador cada cuatro segundos para sincronizar al sistema de control (Figura 9.a). En el segmento 3 el PLC lee al valor deseado de temperatura en el rango 0–32000 y lo normaliza al rango 0–1 (Figura 9.b), y en el segmento 4 se hace algo similar con la lectura del sensor de temperatura (Figura 9.c). El PLC S7–200 cuenta con una subrutina para el control PID, la que es llamada en el segmento 5 de la Figura 9.d; esta subrutina procesa la información del valor deseado y del valor de la temperatura del recinto detectada por el sensor, así como los parámetros del modelo PID que se introdujeron previamente en la memoria del PLC, entregando como resultado un valor entre 0 y 1 que representa la proporción de la velocidad que debe tener el ventilador para que el enfriamiento obtenido permita alcanzar la temperatura deseada. Figura 9a. Inicio de proceso Figura 9b. Normalización del valor deseado 13 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Figura 9c. Lectura del sensor Figura 9d. Control PID La señal de salida de la subrutina PID es desnormalizada para que esté en el rango 0–32000 que corresponde a un voltaje de 0–10 volts en el canal de salida analógica del PLC, esto se hace en el segmento 6 del programa de interrupción (Figura 9.d). Resultados Se realizaron cuatro pruebas y al inicio de cada una de ellas se activaron las lámparas (permaneciendo así durante toda la prueba) y se mantuvo apagado al ventilador hasta alcanzarse el valor inicial de temperatura, y después se ejecutó el programa de control PID desde el PLC para determinar el nivel de velocidad del ventilador en el rango de 0–100 % según se requiriera para alcanzar el valor deseado de temperatura. 14 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Prueba 1 Consistió en obtener el valor deseado de temperatura (23 ºC) a partir de un valor inicial mayor (30 ºC). El sistema detectó el error entre la temperatura medida y la deseada, y trató de reducirlo enviando al inicio el máximo voltaje al motor del ventilador, pero al hacerse más pequeño el error fue disminuyendo el voltaje, reduciéndose la velocidad del motor. Sí se alcanzó con muy pocas oscilaciones el valor deseado de temperatura en aproximadamente 300 segundos y se mantuvo estable. En la Figura 10 se observa la respuesta del sistema en esta prueba. Prueba 2 La prueba inició con una temperatura de 23.5 ºC y se pretendía alcanzar un valor deseado de 25.5 ºC. Después se activó el PLC y como la temperatura deseada era mayor al valor inicial de temperatura, el control PID no envió voltaje al ventilador y éste no operó sino hasta que se superó el valor deseado. Se observa en la Figura 11 que se incrementó la temperatura hasta el valor deseado en aproximadamente 200 segundos, pero después la temperatura siguió aumentando a causa de las fuentes de calor, y aunque se activó el ventilador para tratar de bajarla y estabilizarla en el valor deseado, esto no fue posible, ya que la temperatura se mantuvo oscilando por encima de este valor. Figura 10. Respuesta de la prueba 1 15 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Figura 11. Respuesta de la prueba 2 Prueba 3 La temperatura inicial (26.5 ºC) fue mayor al valor deseado (24 ºC). En la Figura 12 se observa que el sistema sí fue capaz de enfriar hasta un valor muy cercano al deseado en aproximadamente 200 segundos pero después se registró un pequeño aumento en la temperatura y se estabilizó en el valor de la temperatura ambiente del exterior de la maqueta (24.5 ºC). No fue posible alcanzar el valor deseado por ser menor a esa temperatura ambiente. Figura 12. Respuesta de la prueba 3 16 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Prueba 4 El valor deseado de temperatura fue igual al valor de la temperatura ambiente del exterior del recinto (25 ºC). Figura 13. Respuesta de la prueba 4 Se esperaba que el sistema de control mantuviera el recinto a la temperatura ambiente pero el calentamiento producido por las fuentes de calor impidió que la temperatura se estabilizara en ese valor, aunque se observa en la Figura 13 que el sistema intentaba llegar al valor deseado. Discusión de resultados El sistema tiene una muy buena respuesta cuando la temperatura que se persigue es menor a la temperatura inicial del recinto (se necesita enfriamiento); no obstante, presenta muy mala respuesta de temperatura cuando el valor deseado es superior a la temperatura inicial (se necesita calentamiento). Lo anterior debido a que el sistema fue diseñado para enfriar al recinto con el uso del ventilador y no se agregaron calefactores para incrementar la temperatura, puesto que en un centro de cómputo el problema a resolver es enfriar el ambiente y para esto no se necesitan calefactores. 17 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Costo del sistema Este sistema tiene un costo relativamente bajo, ya que la parte más cara es el PLC con un precio de $7000, incluyendo un módulo de CPU y un módulo de entradas / salidas analógicas. El sensor de temperatura y el ventilador, junto con la circuitería y cableado de las etapas de acondicionamiento, de potencia y de valor deseado poseen un costo no mayor a $500. Éste aumentará al implementar el sistema de control de temperatura en un centro de cómputo real, porque será necesario usar varios sensores y ventiladores, incrementándose los requerimientos de circuitería y cableado. Cabe mencionar que la inversión realizada para este sistema se puede recuperar con el ahorro de energía que produce. Conclusiones • El sistema alcanza y mantiene la temperatura en un nivel muy cercano al valor deseado, en un tiempo relativamente corto. • El sistema es más eficiente cuando el valor deseado es menor a la temperatura inicial. Es decir, el sistema está diseñado para disminuir la temperatura no para aumentarla, por lo que la respuesta del sistema es deficiente cuando el valor deseado es superior a la temperatura inicial. • El valor que se persigue no debe ser menor a la temperatura exterior del recinto, ya que no será posible enfriar por debajo de la temperatura exterior, pero en caso de requerirse esta condición será necesario usar sistemas de aire acondicionado, incrementándose los costos del equipo y de la energía. • Este sistema se puede usar para el control del enfriamiento de cualquier recinto como talleres, almacenes o salones de clase, haciendo los ajustes necesarios de acuerdo con los requerimientos de cada caso. • El sistema de control de temperatura es relativamente barato. • Se ahorra energía eléctrica, debido a que el ventilador sólo gira a la velocidad necesaria para el nivel indispensable de enfriamiento. 18 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 Trabajo futuro • Utilizar varios sensores de temperatura y varios ventiladores. • Incluir sistemas de aire acondicionado. • Diseñar y construir un modelo para un recinto real. • Monitorear el comportamiento del sistema de ventilación durante periodos prolongados para verificar su eficiencia. • Determinar el ahorro de energía que produce este sistema. Bibliografía [1] Cabrera Villalobos, Ernesto (1998). «Control electrónico de temperatura para equipo de laboratorio». Tesis de Ingeniería en Comunicaciones y Electrónica, Facultad de Ingeniería de la Universidad Autónoma de Zacatecas. [2] Castro Chaírez, Clara Arcelia y Carreón Gaytán, Raúl (2003). «Control Proporcional con saturación de temperatura». Tesis de Ingeniería en Comunicaciones y Electrónica, Unidad Académica de Ingeniería Eléctrica de la Universidad Autónoma de Zacatecas. [3] «Datasheet Catalog». Datos técnicos de circuitos electrónicos, consultada en abril de 2007 en la dirección: http://www.datasheetcatalog.net/ [4] Grey, Salvador (2006). «Control de una banda transportadora por el PLC S7– 200». Tesis de Ingeniería en Comunicaciones y Electrónica, Unidad Académica de Ingeniería Eléctrica de la Universidad Autónoma de Zacatecas. [5] «Manual del PLC S7–200 Programmable Controller de SIEMENS», edición 2000. [6] Kuo, Benjamín (2001). «Sistemas de control automático». Editorial Prentice Hall, séptima edición. México. [7] «National Semiconductor Corporation». Página electrónica con datos técnicos de componentes electrónicos. Consultada en marzo de 2007 en la dirección: http://www.national.com [8] Ogata, Katzuhiko (1998). «Ingeniería de Control Moderna». Editorial Prentice Hall, tercera edición. México. 19 Revista Investigación Científica Vol. 3, No. 3, Nueva época. Septiembre - Diciembre 2007. ISSN 1870-8196 [9] Ortega Cárdenas, Rubén (1993). «Control electrónico de temperatura basado en PC». Tesis de Ingeniería en Comunicaciones y Electrónica, Facultad de Ingeniería de la Universidad Autónoma de Zacatecas. 20