sistema de riego articulo finaaal
Anuncio

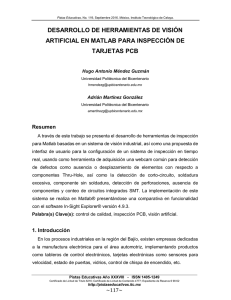
Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. Sistema de riego automatizado controlado por sensores de humedad Kristhian Omar Olmeda Millán Universidad Autónoma de Sinaloa, Facultad de Ingeniería, Teléfono: (52667) 7134053, Fax: (52667) 7134053,Dirección: Ave. De Las Américas Y Blvd. Universitarios s/n (Culiacán) [email protected] Nexar Daniel Figueroa Norzagaray Universidad Autónoma de Sinaloa, Facultad de Ingeniería, Teléfono: (52667) 7134053, Fax: (52667) 7134053,Dirección: Ave. De Las Américas Y Blvd. Universitarios s/n (Culiacán) [email protected] Máximo Héctor Benítez Medina Universidad Autónoma de Sinaloa, Facultad de Ingeniería, Teléfono: (52667) 7134053, Fax: (52667) 7134053,Dirección: Ave. De Las Américas Y Blvd. Universitarios s/n (Culiacán) [email protected] Manuel de Jesús Camacho Moreno Universidad Autónoma de Sinaloa, Facultad de Ingeniería, Teléfono: (52667) 7134053, Fax: (52667) 7134053,Dirección: Ave. De Las Américas Y Blvd. Universitarios s/n (Culiacán) [email protected]. Gerzo Alejandro Machado Castro Universidad Autónoma de Sinaloa, Facultad de Ingeniería, Teléfono: (52667) 7134053, Fax: (52667) 7134053,Dirección: Ave. De Las Américas Y Blvd. Universitarios s/n (Culiacán) Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~1~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. Resumen El proyecto consiste en un sistema de riego automatizado, el cual es contralado por sensores de humedad los cuales envían señales a un microcontrolador el cual dirigirá un mecanismo móvil de aspersión. Este sistema permite controlar un nivel de humedad deseado en el área que se requiere. El objetivo de este prototipo tiene la finalidad de ser usado en áreas verdes y jardines, mediante este sistema de riego se pretende disminuir el impacto ambiental que causa el desperdicio del agua, lo que a su vez también se manifiesta en un ahorro económico significativo. Este nuevo diseño que ahora se describe es una mejora de un sistema creado anteriormente que funciona con sensores de humedad, las mejorías implementadas a este prototipo son: el PIC 16F877A y un mecanismo de aspersión móvil accionado por un motor paso a paso, el cual es regido por el microcontrolador. Este componente ejecutara una rutina programada la cual será activada al recibir una determinada señal proveniente de los sensores de humedad. Palabra(s) Clave(s): ahorro de agua, control automático, electroválvulas, motores, PIC16f877A, Sensor de humedad, sistema de riego. Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~2~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. 1. Introducción Este documento expresa la realización y análisis hecho por los autores respecto al funcionamiento del sistema de riego, tanto diseños mecánicos, eléctricos y todo el diagrama general del sistema de riego, así como los métodos utilizados para la obtención de los resultados, los cuales se expresaran en nuestras conclusiones generales. Se denomina sistema de riego al conjunto de estructuras que hace posible que una determinada área pueda ser irrigada con la aplicación de agua necesaria para las plantas. Entre los sistemas de riego automatizados que existen, están los que se controlan programándolos con un tiempo de riego determinado y los que funcionan en base a sensores que controlan una cierta variable, la que puede ser de humedad o temperatura. Utilizando sensores para medir la humedad del suelo, en lugar de un programa de riego pre-determinado a una hora del día y con duración específica. El sistema de riego que a continuación presentamos consta principalmente de un sensor capaz de captar la humedad en el suelo, la información recabada por este dispositivo enviara una señal analógica al PIC 16F877A [1], el cual ya tendrá un parámetro establecido para descifrarlos niveles de voltaje de la señal y dependiendo de estos se efectuara una opción la cual será transmitida por este componente a una serie de relevadores, para así activar los componentes tales como, electroválvulas, bomba de agua y un motor. Una vez encendidos el motor producirá un movimiento que será transmitido a una varilla roscada, la cual permitirá que haya un desplazamiento lineal del aspersor, a comparación de sistemas actuales [2], la ventajas de este sistema es que con la retroalimentación arrojada por los sensores de humedad, podremos saber la zona que requiere regarse. La bomba de agua nos proporcionaría la presión adecuada para cubrir mayores extensiones de suelo a diferencia de otros sistemas que solo utilizan la presión suministrada por el servicio de agua potable [3]. Todo con la finalidad de atender el problema relacionado con la optimización del agua ya que la mayoría de los sistemas no controlan la cantidad de uso de esta. Nuestro sistema de riego presenta un sensor de humedad el cual se encargara del control de esta variable en comparación de otros sistemas de riego [4], el nuestro se muestra más completo y con una mejor eficacia al estar con más tendencia a lo moderno. Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~3~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. El artículo se compone de la siguiente manera, los métodos que está compuesto por mecanismo, sistema eléctrico y posteriormente la programación de microcontrolador, ya por último se exponen los resultados y conclusiones del proyecto. 2. Métodos 2.1 Mecanismos Esta parte de nuestro sistema de riego es la que permitirá tener un control sobre un mecanismo móvil, lo cual nos proporciona un mayor alcance de área para el riego. El mecanismo consta de una varilla roscada de 3/4 de pulgada de diámetro, esta apoyada con una base a cada extremo en las cuales se encuentra un balero tipo Ohm, que permite el movimiento angular de la varilla, a uno de los extremo tenemos el motor acoplado a la varilla roscada que proporciona el giro de desplazamiento. Se tiene una varilla paralela a la varilla roscada que sirve como apoyo para el desplazamiento de la tuerca que está unida con la base del aspersor a la varilla roscada, este acoplamiento, aparte de servir como apoyo, nos permitirá que se gire la base del aspersor. (Ver Fig. 1). Figura 1. Mecanismo Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~4~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. 2.2 Eléctrico Conformando el apartado eléctrico del sistema de riego se encuentran una serie de sensores de humedad de tipo resistivo (Ver tabla 1), los cuales mediante un par de electrodos insertados en el suelo logran detectar la existencia o la falta de humedad, dependiendo del nivel de voltaje que se tenga entre sus dos puntas de prueba (Ver Fig. 2), el voltaje de salida que obtenemos de estos sensores será enviando hacia un microcontrolador, el cual determina el encendido de nuestro sistema de riego. Dependiendo de la señal enviada por el sensor de humedad será lo que dará inicio a una serie de instrucciones programadas en el microcontrolador, las cuales se explicaran con más a detalle en el apartado dedicado para el mismo. A su vez en el sistema eléctrico intervienen una serie de relevadores, los cuales funcionan con una fuente de alimentación de 5 volts, los relevadores activaran o desactivaran una serie de mecanismos tales como una electroválvula, la cual funciona con 24v AC, un motor eléctrico y una bomba de agua la cual nos proporcionara la presión suficiente para nuestras labores de riego. Para mover el motor hacia derecha e izquierda requerimos de un circuito para controlador su polaridad y avance en ambos sentidos (Ver Fig. 3).Basados en libros pudimos aprender a realizar este circuito de control para cambiar la polaridad del motor según se desee [5]. Cantidad Materiales 2 Transistores 2n2222a 1 Led 4 Resistencias 1kΩ 2 Baquelita Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~5~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. Tabla.1 Material del sensor Fig. 2 Esquemático Sensor Fig. 3 Control del Motor 2.3 Programación El microcontrolador que usamos en este proyecto es el PIC 16F877A [1] de la marca Microchip, el cual fue elegido por tener buenas prestaciones y ser de un costo accesible para este tipo de proyectos, se programo en lenguaje ensamblador utilizando la herramienta de software de programación MPLAB 8.89v [6], el cual es desarrollado también bajo la marca Microchip. Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~6~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. Para su programación se aprovecharon las capacidades técnicas del microcontrolador, donde se pueden procesar datos de entrada para obtener una salida deseada, que en nuestro caso serviría para el propósito del riego (Ver Fig. 4). El microcontrolador es alimentado con una señal de entrada proveniente de los sensores de humedad, los cuales tienen una salida de 5 volts, que llega a los puertos de entrada del PIC lo que inicia el proceso de control enviando unas señales para la activación de los relevadores lo que permitirá que se ponga en marcha una bomba de agua, una electroválvula y el mecanismo de desplazamiento que mueve el aspersor. (Ver Fig. 5). La lógica de programación funciona de la siguiente manera, el PIC está a la espera de una señal del entrada lo que es un 1 lógico de cualquiera de los sensores que estén disponibles, los cuales estarán distribuidos en zonas, después de esto el PIC procesa esa señal y envía la señal a la salida correspondiente según la zona en la cual fue requerido el riego.(Ver Fig. 6)., por ejemplo si la señal del sensor se origino del lado izquierdo del mecanismo, este se moverá hacia ese lado ejecutando la rutina de riego que tenga programa hacia el lado izquierdo, esto activara la electroválvula y la bomba de agua haciendo que el motor se active y el motor gire hacia el lado requerido, haciendo mover la plataforma del aspersor sobre la varilla roscada.(Ver Fig. 7). Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~7~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. Fig. 5 Esquemático del circuito Fig. 6 Diagrama de Flujo Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~8~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. Figura 7. PIC 16F877A 3. Resultados Los resultados obtenidos fueron similares a los planteados en la fase del diseño del sistema de riego automatizado, se observo que el sistema cumplía adecuadamente con las rutinas programadas en el microcontrolador, permitiendo el riego en la zonas donde se tenía un sensor de humedad, el sistema mecánico permite cubrir una mayor área de riego utilizando solo un aspersor, lo que lo hace más fácil en su uso y también a permite el ahorro d agua ya que este sistema solo riega en el momento de que detecta una ausencia de humedad en el suelo, lo que inicia el proceso del sistema. 5. Conclusiones Con la implementación del sistema de riego automatizado se lograra un ahorro de agua, así como también el cuidado de los jardines, para llevar a cabo este proceso utilizaremos tecnologías fáciles de implementar y de costo accesible para cualquier usuario. Este sistema en los próximos meses con un mecanismo móvil de aspersión que regara por coordenadas donde se requiere, lo que permitirá tener un mejor desempeño en el riego ya que el sistema podrá desplazarse libremente por toda la zona de a regar. Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~9~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. 6. Referencias [1] PIC16F877A DATASHEET http://www.microchip.com/downloads/en/DeviceDoc/39582C.pdf, Mayo 2014. [2] CONTROL DE RIEGO INTELIGENTE CON EL PIC 12F675, https://www.youtube.com/watch?v=ERr6tpf8Cak, Mayo 2014 [3] Manual de diseño de un sistema de riego residencial, http://www.hunterindustries.com/sites/default/files/DG_ResidentialSprinklerSyste mDesignHandbook_sp.pdf, Mayo 2014. [4]Diseño de un sistema de riego por aspersión, http://ing.unne.edu.ar/pub/hidro12.pdf, Mayo 2014 [5]CHAPMAN, Stephen J.: "Máquinas eléctricas". México, Ed. McGrawHill/Interamericana, 2005 [6] MPLAB 8.9 IDE http://mplab-ide.software.informer.com/8.9/ , Mayo 2014 7. Autores Kristhian Omar Olmeda Millán, estudiante de sexto semestre de la carrera ingeniería en procesos industriales en la Facultad de ingeniería de la Universidad autónoma de Sinaloa. Nexar Daniel Figueroa Norzagaray, estudiante de sexto semestre de la carrera ingeniería en procesos industriales en la Facultad de ingeniería de la Universidad autónoma de Sinaloa. Manuel de Jesús Camacho Moreno estudiante de sexto semestre de la carrera ingeniería en procesos industriales en la Facultad de ingeniería de la Universidad autónoma de Sinaloa. Máximo Héctor Benítez Medina estudiante de sexto semestre de la carrera ingeniería en procesos industriales en la Facultad de ingeniería de la Universidad autónoma de Sinaloa. Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~10~ Pistas Educativas, No. ###, #####-##### 20##. México, Instituto Tecnológico de Celaya. Gerzo Alejandro Machado Castro estudiante de sexto semestre de la carrera ingeniería en procesos industriales en la Facultad de ingeniería de la Universidad autónoma de Sinaloa. Pistas Educativas Año ###### - ISSN 1405-1249 Certificado de Licitud de Título 6216; Certificado de Licitud de Contenido 4777; Expediente de Reserva 6 98 62 http://pistaseducativas.itc.mx ~11~