universidad nacional abierta ya distancia escuela de
Anuncio

UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA
PROGRAMA INGENIERIA ELECTRÓNICA
302526 - CAD PARA ELECTRÓNICA
JUAN OLEGARIO MONROY VÁSQUEZ
(Director Nacional)
FABIAN BOLIVAR MARIN
(Acreditador)
SOGAMOSO
Enero de 2010
1
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA This work is licensed under a Creative Commons Attribution‐NoDerivs 2.5 License.
CURSO: CAD PARA ELECTRÓNICA
@Copyright Universidad Nacional Abierta y a Distancia
ISBN
2010
Vicerrectoría de Medios y Mediaciones
2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA ASPECTOS DE PROPIEDAD INTELECTUAL Y VERSIONAMIENTO
El presente módulo fue diseñado en el año 2007 por el Ing. Juan Olegario Monroy
Vásquez con la colaboración de la Ingeniera Sandra Isabel Vargas, ingeniera
Electrónica especialista en Aprendizaje Autónomo y con mas de diez años de
experiencia en docencia universitaria.
El presente módulo ha tenido dos actualizaciones, desarrollados por el ing. Juan
Monroy en los años 2008, 2009 y 2010, quien ha sido tutor de la UNAD en el
CEAD de SOGAMOSO, desde el año 2001 y se desempeña actualmente como
director del cuso a nivel nacional.
Las actualizaciones del material incluyen aspectos de fondo y forma, e la parte de
fondo se ha incluido nuevos capítulos donde se dan explicaciones sobre el manejo
de la simulación a partir del aplicativo PROTEUS; en los aspectos de forma, se ha
adaptado a los linimientos y estándares dados por la UNAD.
Este mismo año el Ing. FABIAN BOLIVAR MARIN, tutor del CEAD de Neiva,
apoyó el proceso de revisión de estilo del módulo y dio aportes disciplinares,
didácticos y pedagógicos en el proceso de acreditación de material didáctico
desarrollado en el primer periodo de 2010.
3
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA INTRODUCCIÓN
Cad para Electrónica, es un modulo orientado a cada uno de los estudiantes y
personas interesadas en diseñar y simular circuitos electrónicos, hacer
modelamiento matemático y conocer los fundamentos de programación. Pretende
entonces cubrir cada uno de estos aspectos a partir de la teoría que los
fundamenta, con ejemplos y talleres que permitan realizar una mayor apropiación
de cada uno de los conceptos que los soportan.
En el mercado del software actualmente existe gran variedad de programas que
cubre cada una de estas temáticas de forma discriminada o general convirtiéndose
en una amplia gama de posibilidades a utilizar frente a las necesidades propias del
estudiante o persona interesada; por tanto este módulo, de igual forma pretende
orientar dentro de este conjunto de posibilidades y destacar aquel software que
mejores prestaciones ofrezca.
Se recomienda que para abordar este modulo se tenga conocimiento sobre los
conceptos de: circuitos, electrónica básica y sistemas digitales básicos, para el
manejo del diseño y simulación de los circuitos; ya que es indispensable que se
conozcan cada uno de los elementos que conforman un circuito, sus
características y comportamiento. Con estos conceptos se aborda el manejo de
software presente en el medio y con el cual se pueda estructurar un circuito y
simular su funcionamiento para observar su comportamiento y respuesta que
ofrece. Esta temática corresponde a la primera parte de la unidad número 1, que
se apoya y se soporta en el manejo de los sistemas operativos y su plena
diferenciación desde el punto de vista de usuario final.
En la siguiente parte de la unidad uno se maneja propiamente el diseño y
simulación de circuitos electrónicos desde la clasificación en circuitos DC, AC
Digitales y la generación de sus respectivos impresos, en cada uno de ellos se
dan ejemplo paso a paso de cómo hacer el esquema y posterior simulación en
software.
Con el modelamiento matemático se inicia la segunda unidad, importante para el
estudio de casos factibles de representarse a partir de funciones y/o ecuaciones
matemáticas, para ello se deben manejar los conceptos de algebra lineal y cálculo
diferencial
4
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA En la siguiente parte de la segunda unidad se centra la atención en el manejo de
los principios de la programación como herramienta para el desarrollo de software
en lenguajes de programación de alto nivel y de bajo nivel, conceptos
fundamentales en un Ingeniero Electrónico.
Esta serie de elementos concatenados y bien estructurados proveen
de
herramientas al ingeniero Electrónico en un campo donde la precisión, el análisis,
la puesta a prueba, la experimentación juegan un papel importante a la hora de
diseñar alternativas de solución a problemas en el área de la electrónica; de ahí
que estos aspectos se tomen en cuenta dentro del curso para enfocar la
evaluación en ese sentido, en descubrir y fortalecer en el estudiante esa
capacidad de análisis, ya sea de forma individual o grupal y que se ponen en
evidencia a través de la autoevaluación y heteroevaluación.
Finalmente es importante destacar que el estudiante dispone de una serie de
recursos tecnológicos dispuestos para el desarrollo y acompañamiento en el
proceso de aprendizaje, que orientados a través del tutor, buscan potenciar las
habilidades individuales y de grupo a través de un campus virtual enriquecido con
actividades, recursos, herramientas, material didáctico, fuentes documentales,
enlaces de interés y profundización de temáticas entre otros.
5
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA INDICE DE CONTENIDO
UNIDAD 1: CONCEPTOS DISEÑO Y SIMULACIÓN DE CIRCUITOS
ELECTRÓNICOS
1
CAPÍTULO 1: CONCEPTOS Y SOFTWARE
2
Lección 1. Circuito electrónico y clasificación
3
Lección 2. Descripción de Software Disponible Para Circuitos Electrónicos
7
Lección 3. Sistemas operativos
12
Lección 4. Características del sistema operativo gnu/linux
15
Lección 5. Características del sistema operativo Windows
18
CAPÍTULO 2: DISEÑO Y SIMULACIÓN DE CIRCUITOS DC,AC
20
Lección 6. Dispositivos electrónicos e interconexión circuit maker
20
Lección 7. Dispositivos electrónicos e interconexión Proteus
29
Lección 8. Guardar y cargar circuitos circuit maker, proteus
38
Leccion 9. Simulación del circuito ac/dc y ejercicios de aplicación circuit maker 43
Leccion 10. Simulación del circuito ac/dc y ejercicios de aplicación proteus
49
CAPÍTULO 3: DISEÑO Y SIMULACIÓN DE CIRCUITOS DIGITALES, CIRCUITOS
IMPRESOS
60
Lección 11. Dispositivos electrónicos e interconexión circuit maker y proteus
60
Lección 12. Simulación de circuitos y ejercicios de aplicación circuit maker
64
Lección 13. Simulación de circuitos y ejercicios de aplicación proteus
67
6
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 14. Diagrama esquemático de Circuitos impresos, importar y generar pcb
circuit maker
71
Lección 15. Diagrama esquemático de Circuitos impresos, importar y generar PCB
proteus
75
ACTIVIDAD DE UNIDAD 1
82
FUENTES DOCUMENTALES UNIDAD 1
83
UNIDAD 2: MODELAMIENTO MATEMÁTICO Y FUNDAMENTOS DE
PROGRAMACIÓN
87
CAPÍTULO 1: TRATAMIENTO MATEMÁTICO
89
Lección 1. Polinomios y operaciones.
89
Lección 2. Derivadas e integrales definidas y no definidas
93
Lección 3. Señales continuas, discretas y funciones de transferencia
96
Lección 4. Respuesta temporal
98
Lección 5. Respuesta en términos de la frecuencia.
103
CAPÍTULO 2: OPERACIONES CON ARREGLOS
107
Lección 6. Arreglos - vectores
107
Lección 7. Arreglos – matrices
110
Lección 8. Otras formas de definir matrices.
113
Lección 9. Estructuras
117
Lección 10. Aplicaciones
119
CAPÍTULO 3: FUNDAMENTOS DE PROGRAMACIÓN
121
Lección 11. Conceptos y tipos de datos
121
7
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 12. Instrucciones e/s y selección
124
Lección 13. Instrucciones repetitivas
131
Lección 14. Fundamentos de programación en matlab
137
Lección 15. Instrucciones repetitivas y funciones en matlab
141
ACTIVIDAD DE AUTOEVALUACIÓN UNIDAD 2
145
FUENTES DOCUMENTALES UNIDAD 2
146
8
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA LISTADO DE TABLAS
Tabla 1. Principales elementos electrónicos y su simbología
4
Tabla 2. Componentes electrónicos en Circuit Maker
25
Tabla 3. Componente Digitales Circuit Maker
61
Tabla 4. Componentes Digitales Proteus
62
Tabla 5. Variantes de la función diff
93
Tabla 6. Ejemplos de derivadas en Matlab
94
Tabla 7. Variantes de la función int
95
Tabla 8. Ejemplos de integrales en Matlab
95
Tabla 9. Ejemplos de operaciones con vectores
109
Tabla 10. Funciones para trabajar con vectores
110
Tabla 11. Ejemplos de operaciones con matrices
112
Tabla 12. Funciones para el trabajar con matrices
113
Tabla 13. Funciones para trabajar con matrices particulares
114
Tabla 14. Formas de generar matrices a partir de otras
115
Tabla 15. Funciones para operar con estructuras
118
Tabla 16. Palabras clave en el pseudocódigo
122
Tabla 17. Simbología utilizada en los diagramas de flujo
123
9
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 18. Valores de verdad operador “and”
126
Tabla 19. Valores de verdad operador “or”
126
Tabla 20. Operadores lógicos en Matlab
138
10
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA LISTADO DE GRAFICOS Y FIGURAS
Figura 1. Circuito Serie
6
Figura 2. Circuito Paralelo
6
Figura 3. Circuito Serie - Paralelo
6
Figura 4. Entorno general de trabajo Circuit Maker
21
Figura 5. Barra de Herramientas Circuit Maker
21
Figura 6. Dispositivos Electrónicos Circuit Maker
24
Figura 7. Selección de dispositivos Circuit Maker
26
Figura 8. Dispositivos en área de trabajo Circuit maker
27
Figura 9. Terminal de una componente Circuit Maker
28
Figura 10. Circuito amplificador
28
Figura 11. Entorno general de trabajo Proteus.
29
Figura 12. Barra de Herramientas Proteus
30
Figura 13. Dispositivos electrónicos Proteus
33
Figura 14. Listado de componentes Proteus
34
Figura 15. Interconexión de dispositivos Proteus
35
Figura 16. Dispositivos en área de trabajo Proteus
36
Figura 17. Terminal de una componente Proteus
37
11
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 18. Circuito Amplificador
37
Figura 19. Guardar circuitos Ciruit Maker
38
Figura 20. Seleccionar carpeta Circuit Maker
39
Figura 21. Guardar circuitos Proteus
39
Figura 22. Seleccionar carpeta Proteus
40
Figura 23. Cargar circuitos Circuit Maker
40
Figura 24. Seleccionar archivos Circuit Maker
41
Figura 25. Ediciones de circuitos Circuit Maker
41
Figura 26. Cargar circuitos Proteus
42
Figura 27. Seleccionar archivos Proteus
42
Figura 28. Ediciones de circuitos Proteus
43
Figura 29. Montaje de amplificador en circuit Maker
43
Figura 30. Simulación de circuitos Circuit Maker
44
Figura 31. Respuesta amplificador en términos de la frecuencia
45
Figura 32. Ejercicio de aplicación circuit maker, mallas
45
Figura 33. Medidas tomadas con instrumentos en Circuit Maker, mallas
47
Figura 34. Ejercicio de aplicación Circuit Maker, amplificador
47
Figura 35. Medidas tomadas con instrumentos en Circuit Maker, amplificador
48
Figura 36. Resultados simulación del amplificador divisor de tensión en circuit
Maker
49
12
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 37. Montaje de amplificador en Proteus
50
Figura 38. Selección de componentes Proteus
50
Figura 39. Componentes seleccionados para el amplificador en Proteus
51
Figura 40. Componentes en el área de trabajo Proteus para amplificador
51
Figura 41. interconexión del montaje de amplificador en Proteus
52
Figura 42. Ubicación de instrumentos de medida amplificador Proteus
52
Figura 43. Ubicación de elementos de visualización Proteus
53
Figura 44. Arrastrar punto reprueba al área de visualización Proteus
54
Figura 45. Edición del visualizador en Proteus
54
Figura 46. Resultados simulación del amplificador en Proteus
55
Figura 47. Ejercicio de aplicación Proteus mallas
56
Figura 48. Medidas tomadas con instrumentos Proteus, mallas
57
Figura 49. Ejercicio de aplicación Proteus, amplificador
58
Figura 50. Medidas tomadas con instrumentos Proteus, amplificador
59
Figura 51. Resultados de simulación amplificador división de tensión en
Proteus
60
Figura 52. Ejemplo para montaje de circuito digital
64
Figura 53. Resultado de simulación circuito digital Circuit Maker
65
Figura 54. Circuito astable Circuit Maker
65
Figura 55. Resultado de simulación circuito astable Circuit Maker
66
13
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 56. Circuito Contador Digital Circuit Maker
66
Figura 57. Resultado de simulación circuito contador digital Circuit Maker
67
Figura 58. Ejemplo para montaje de circuito digital
67
Figura 59. Resultado de simulación circuito digital Proteus
68
Figura 60. Circuito astable Proteus
69
Figura 61. Resultado de simulación circuito astable Proteus
69
Figura 62. Circuito contador digital Proteus
70
Figura 63. Resultado de simulación circuito contador digital Proteus
70
Figura 64. Conectores Circuit Maker
71
Figura 65. Diagrama esquemático para generar PCB Circuit Maker
72
Figura 66. Ventana para exportación PCB
72
Figura 67. Ventana de Información del PCB generado Circuit Maker
73
Figura 68. PCB generado Circuit Maker
74
Figura 69. Ventana Salvar PCB Circuit Maker
74
Figura 70. Trazado de las pistas PCB circuit Maker
75
Figura 71. Conectores PCB
76
Figura 72. Diagrama esquemático para generar PCB Proteus
76
Figura 73. Ventana de configuración del listado de elementos en la red del
PCB Proteus
77
Figura 74. Lista de red para PCB Proteus
14
78
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 75. Ventana ARES-Proteus
78
Figura 76. Área para definir la capa de trabajo PCB Ares-Proteus.
79
Figura 77. Definición del área para el PCB Ares-Proteus
79
Figura 78. Elementos y conexiones del PCB recién generado Ares-Proteus. 80
Figura 79. Pistas generadas para el PCB Ares-Proteus
80
Figura 80. Ventana para configurar las características del PCB Ares-Proteus81
Figura 81. Entorno de trabajo Matlab
91
Figura 82. Operaciones en Matlab
92
Figura 83. Ejemplo de la gráfica de una señal continua en Matlab
97
Figura 84. Ejemplo de la gráfica de una señal en tiempo discreto en Matlab 97
Figura 85. Respuesta ante una entrada escalón unitario, , para un sistema de
tiempo continuo
99
Figura 86. Respuesta ante una entrada escalón unitario modificando t,
100
Figura 87. Respuesta ante una entrada impulso unitario, para un sistema de
tiempo continuo
100
Figura 88. Respuesta ante una entrada escalón unitario, para un sistema de
tiempo discreto.
102
Figura 89. Respuesta ante una entrada impulso unitario, para un sistema de
tiempo discreto.
102
Figura 90. Diagrama de Bode
103
Figura 91. Diagrama de Bode modificando el rango de frecuencias
104
Figura 92. Diagrama de Nichols.
105
15
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 93. Diagrama de Nyquist
106
Figura 94. Resultado de usar el comando Margin
106
Figura 95. Matriz en Matlab
111
Figura 96. Circuito para manejo de mallas
119
Figura 97. Diagrama de la estructura general de un sistema.
124
Figura 98. Sintaxis diagrama de flujo de la instrucción condicional
127
Figura 99. Diagrama de Flujo para determinar el mayor de dos números
128
Figura 100. Diagrama de Flujo para determinar el mayor de tres números 129
Figura 101. Diagrama de Flujo que determina si una vocal es abierta o cerrada
130
Figura 102. Diagrama de flujo para generar los número de 1 a 20
132
Figura 103. Diagrama de Flujo para determinar la cantidad de divisores de un
número.
134
Figura 104. Diagrama de Flujo para realizar una división entera entre dos
números a partir de restas sucesivas
136
16
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA UNIDAD 1: CONCEPTOS DISEÑO Y SIMULACIÓN DE CIRCUITOS
ELECTRÓNICOS
INTRODUCCIÓN
En el mercado del software actualmente existe gran variedad de programas que
cubre cada una de estas temáticas de forma discriminada o general convirtiéndose
en una amplia gama de posibilidades a utilizar frente a las necesidades propias del
estudiante o persona interesada; por tanto este módulo, de igual forma pretende
orientar dentro de este conjunto de posibilidades y destacar aquel software que
mejores prestaciones ofrezca. Se recomienda que para abordar este modulo se
tenga conocimiento sobre los conceptos de: circuitos, electrónica básica y
sistemas digitales básicos, para el manejo del diseño y simulación de los circuitos;
ya que es indispensable que se conozcan cada uno de los elementos que
conforman un circuito, sus características y comportamiento. Con estos conceptos
se aborda el manejo de software presente en el medio y con el cual se pueda
estructurar un circuito y simular su funcionamiento para observar su
comportamiento y respuesta que ofrece. Esta temática corresponde a la primera
parte de la unidad número 1, que se apoya y se soporta en el manejo de los
sistemas operativos y su diferenciación desde el punto de vista de usuario final.
JUSTIFICACION
La simulación de sistemas, procesos, circuitos, son fundamentales dentro de la
etapa de diseño de todo ingeniero, disponer de herramientas que permitan realizar
estos procesos, sin que ello implique riesgo para la integridad del ser humano se
convierte entonces en un elemento indispensable a conocer y explorar; este
modulo permite por tanto conocer los aspectos a tener en cuenta en una
simulación y el software que puede brindar ese soporte.
INTENCIONALIDADES FORMATIVAS
Propósitos
•
Afianzar los conceptos de diseño de circuitos electrónicos a partir de
herramientas de software.
1
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA •
Fortalecer el proceso de análisis a partir de respuestas dadas por los
circuitos simulados a través de software
•
Utilizar el Computador como herramienta de análisis en el proceso de
diseño de circuitos
Objetivos
•
Dar a conocer los aspectos primordiales a tener en cuenta en el uso de
herramientas de software para diseño, simulación y puesta a punto de
circuitos electrónicos.
Competencias
•
El estudiante utiliza las herramientas de software en el diseño de circuitos
electrónicos, teniendo en cuenta los diferentes agentes que le afecten y
haciendo uso de la simulación para determinar posibles fallas.
Metas de aprendizaje
Al final del curso el estudiante:
•
Diseñará circuitos electrónicos fruto de un análisis y simulaciones que
definan su comportamiento ante diferentes circunstancias.
Denominación de Capítulos
Capítulo 1. Conceptos y Software
Capítulo 2. Diseño y simulación de circuitos DC, AC
Capítulo 3. Diseño y simulación de circuitos Digitales, Circuitos Impresos
CAPÍTULO 1: CONCEPTOS Y SOFTWARE
Introducción. En este capítulo se recuerdan los conceptos básicos a nivel de
circuitos, de manera que en el momento de abordar la etapa de diseño, se maneje
un mismo idioma, por otro lado de dan definiciones acerca de los sistemas
operativos, sus características y los principales S.O. empleados en el mercado.
2
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 1. Circuito electrónico y clasificación
Un circuito electrónico es una combinación de elementos conectados para formar
una trayectoria completa, por la cual los electrones pueden moverse. La finalidad
de un circuito es hacer uso de la energía de los electrones en movimiento. Por
tanto un circuito es también un sistema de elementos o componentes con el cual
la energía eléctrica puede cambiarse a otra forma de energía, como térmica,
luminosa o magnética. Dentro de un circuito podemos encontrar básicamente
cuatro categorías de elementos:
•
•
•
•
Fuente de Energía. La fuente en un circuito produce la energía requerida
para que los electrones se muevan. En electricidad esta energía es llamada
voltaje o fuerza electromotriz.
Conductores. Los conductores en un circuito proporcionan una trayectoria
fácil por la cual los electrones pueden moverse a través del circuito. El
cobre es el material conductor mas empleado ya sea en forma de alambre
barras o canales.
Carga. La carga es el elemento de un circuito que transforma la energía de
los electrones en movimiento en alguna otra forma útil de energía. Una
resistencia eléctrica es un elemento muy común de carga, cuando la
corriente circula a través de ella, la energía de los electrones en movimiento
se convierte en energía térmica.
Dispositivo de Control. Son aquellos elementos que nos permiten ejercer
un control del flujo de electrones.
Dentro de estas categorías encontramos un conjunto de elementos con funciones
específicas que definen el comportamiento del circuito, cada uno de ello tiene una
representación simbólica universal según la IEEE. En la Tabla 1, se hace una
breve descripción de los principales elementos y su simbología.
3
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
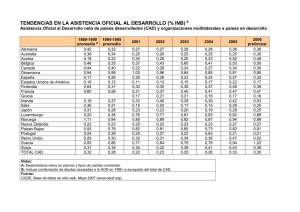
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 1. Principales elementos electrónicos y su simbología
NOMBRE
FUENTE DE
VOLTAJE
FUENTES DE ENERGÍA
SIMBOLO
DESCRIPCIÓN
Proporciona el voltaje de alimentación
+
Vs1
+
1
0
V
a un circuito
10 v
-
FUENTE DE
CORRIENTE
FUENTE
DEPENDIENT
E
Entrega la corriente necesaria de
alimentación a un circuito
Is1
100mA
+
1
Fuente cuya magnitud se establece a
partir de la corriente o voltaje del
sistema donde se encuentra, de
acuerdo a cual de ellas sea, será
fuente de corriente dependiente o
fuente de voltaje dependiente
+
-
-
+
1
-
NOMBRE
FUSIBLES
ALAMBRE
CABLE
NOMBRE
CONDUCTORES
SIMBOLO
DESCRIPCIÓN
Es un elemento que brinda una
protección a otro dispositivo de
acuerdo a un valor de intensidad
1A
establecido que circule por él durante
1A
un periodo de tiempo determinado, si
se supera dicho valor un pequeño
trozo de alambre dentro de él se
funde.
Hilo de conexión de tipo conductor
Alambre o conjunto de ellos
recubierto de un material aislante
CARGA
SIMBOLO
DESCRIPCIÓN
Elemento que ofrece cierta oposición al
paso de la corriente eléctrica
1k
RESISTOR
CONDENSADOR
1uF
BOBINA
Dispositivo que almacena energía
eléctrica, está basado en dos placa
conductora paralelas, separadas por un
dieléctrico.
Elemento que almacena energía en
forma de campo magnético.
1uF
+
1mH
4
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
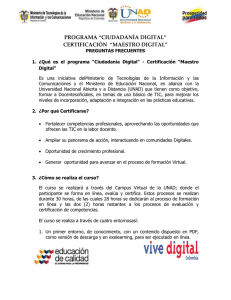
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 1. Principales elementos electrónicos y su simbología (Continuación)
DISPOSITIVOS DE CONTROL
NOMBRE
DIODO
SIMBOLO
DESCRIPCIÓN
Dispositivo que permite el flujo de
corriente en una sola dirección.
DIODE
TRANSISTOR BJT
NPN
TRANSISTOR
FET
Dispositivo que amplifica la corriente,
también es utilizado en conmutación
PNP
Dispositivo de amplificación basado en
un campo eléctrico que controla la
conductividad de un canal.
NJFET
PJFET
TIRISTOR
TRIAC
AMPLIFICADOR
OPERACIONAL
Dispositivo de cuatro capas que utiliza
la realimentación interna para producir
conmutación.
SCR
Circuito electrónico que amplifica la
diferencia de las dos señales de
entrada.
OP AMP
RELEVADORES
Dispositivo electromecánico que
funciona como un interruptor controlado
por un electroimán.
Fuente: Juan Monroy (2007).
Si desea ampliar el conjunto de símbolos electrónicos puede consultar la siguiente
página http://www.simbologia-electronica.com/
Clasificación. Los circuitos electrónicos se clasifican en tres tipos de acuerdo a la
forma como se interconectan los elementos en:
•
Circuito Serie. Un circuito serie proporciona una única trayectoria a través
de la cual los electrones pueden moverse de una Terminal de la fuente de
energía a la otra. Se caracteriza porque la corriente que fluye es igual a
través de cada uno de los elementos que lo componen mientras que el
voltaje en cada uno de ellos es función del propio elemento.
5
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 1. Circuito Serie
Fuente: Juan Monroy (2007).
•
Circuito Paralelo. Un circuito paralelo permite mas de una trayectoria a
través de las cuales pueden fluir los electrones; se caracteriza entonces
porque el voltaje en cada una de estas trayectorias es el mismo pero la
corriente depende de los elementos que la componga.
Figura 2. Circuito Paralelo
Fuente: Juan Monroy (2007).
•
Circuito Serie-Paralelo (Mixto). Estos circuitos presentan las dos
situaciones anteriores en cuanto a las trayectorias que pueden tomar los
electrones y por ende las características de cada uno.
Figura 3. Circuito Serie - Paralelo
Fuente: Juan Monroy (2007).
6
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 2. Descripción de Software Disponible Para Circuitos Electrónicos
Simuladores: Los simuladores de circuitos electrónicos son herramientas de
apoyo en el proceso de aprendizaje y diseño, dado que permiten establecer un
ambiente virtual para una situación real de un circuito, a fin que el usuario tenga la
oportunidad de participar, a través de un conjunto de herramientas, en el proceso
de diseño y prueba en un área específica de la electrónica.
En general, se puede decir que los simuladores de circuito son modelos que se
construyen a partir de especificar un número de variables relevantes internas y
también externas, las cuales deben permitir simular la operación del circuito
electrónico en un ambiente bajo diferentes condiciones, y de esta forma estudiar
su comportamiento y tomar las decisiones pertinentes.
Herramientas: Los simuladores de circuitos electrónicos deben contar con
herramientas que permitan:
• Disponer de elementos o componentes virtuales con características propias
que permitan reflejar a los mismos de la vida real.
• Probar el circuito con señales de prueba con parámetros que faciliten la
modificación de su comportamiento.
• Interactuar fácilmente con el usuario.
• Visualizar adecuadamente los resultados de la simulación.
• Generar circuitos impresos.
¿Para qué sirve un simulador?. Los simuladores de circuitos electrónicos
ofrecen a los estudiantes e ingenieros una innovadora forma de:
• Perfeccionar sus habilidades
• Aplicar conceptos fundamentales de la electrónica
• Evaluar alternativas de solución desde el punto de vista funcional y
económico.
• Generar el diseño y PCB definitivo de un circuito.
Descripción de software disponible. En el mercado existe gran variedad y gama
de software diseñado para la simulación de circuitos electrónicos, dentro de esta
variedad podemos encontrar software tipo beta, versiones profesionales,
enfocados a plataformas específicas, de alto costo, bajo costo, libres, demo,
versiones estudiantiles; sin embargo la intención aquí es conocer las
características principales del software, para así formar un criterio inicial que
permita elegir aquel que se ajuste a las necesidades y particularidades propias.
7
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA A continuación se hace una breve descripción del software propietario o libre que
se encuentra en el mercado, sin embargo en la siguiente página puede además de
la descripción del software tener la posibilidad de descargar las versiones libres o
demos, es necesario verificar que no se descargue software que no tiene licencia
ya que no es legal su uso.
http://formulagfc.galeon.com/productos771272.html
http://olmo.pntic.mec.es/jmarti50/enlaces/d-electronico.html
http://profesormolina.webcindario.com/download/enica/index.htm
http://profesormolina.iespana.es/download/soft_enica.htm
Kicad: Es un programa de código libre (GPL) software para la creación de
esquemas electrónicos y circuitos impresos. Concebido y creado por Jean-Pierre
Charras, investigador en el LIS Laboratorio de Imágenes y Señales) y profesor de
electrónica en el Instituto Universitario de Tecnología de Saint Martin d'Hères, la
suite Kicad es un conjunto de cuatro programas y un gestor de proyectos para
realizar circuitos electrónicos:
•
•
•
•
•
Eeschema: Creación de esquemas.
PcbNew: Realización de circuitos impresos.
Gerbview: Visualización de documentos generados en formato GERBER
(documentos de fototrazado).
Cvpcb: Utilidad de selección de las huellas físicas de los componentes
electrónicos utilizados en el esquema.
Kicad: Gestor de proyectos.
El gestor de proyectos, Kicad, permite seleccionar un proyecto y abrir la
herramienta deseada (Eeschema, PcbNew, ...).
Esta suite de programas se distribuye gratuitamente en open source con licencia
GPL. Es útil para cualquier persona que desee crear circuitos impresos, simples o
complejos.
Estos programas (basados en WXWIDGETS.) son MULTI-PLATAFORMA,
funcionan en LINUX y Windows y son actualizados regularmente.
La versión precompilada Linux ha sido probada en Mandrake 9.2. o 10.0 (funciona
en la 10.1)
8
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Puede ampliar la descripción i funcionalidad de ese en: http://iut-tice.ujfgrenoble.fr/kicad/Kicad_files/LogicielKicad_es.htm
Cocodrilo Clips: Programa especialmente útil para crear diseños
electromecánicos, controlar simulaciones, comprender diseños y sin fin de
posibilidades más. Para crear los circuitos con los que se quiere practicar, tan sólo
se debe elegir de entre toda la gama el componente que se desea incluir y
arrastrarlo desde la barra de herramientas con el ratón. Del mismo modo los
interruptores y botones se arrastran con el ratón. Al crear los circuitos se podrán
observar numerosas animaciones en las que se pueden incluir tensión, fuerza,
corriente y carga. También permite incluir motores y engranajes que giren
mientras se encienden las lámparas. Las lecturas eléctricas y mecánicas se
muestran en burbujas, mientras las trazas del osciloscopio revelan tensiones de
impulso.
El paquete incluye actividades para fotocopiar y ejemplos para probarlos
directamente en el ordenador. Además ofrece ayuda Online tanto para
principiantes como para expertos.
http://www.profesoresinnovadores.net/software/verSoft.asp?id=1312
gEDA(GNU Electronic Design Automation): El proyecto gEDA esta trabajando
en producir una suite completa de herramientas GPL para automatización de
diseño electrónico (EDA). El proyecto gEDA esta orientado en la creación de una
suite de Herramientas para la Automatización del Diseño Electrónico. Esta
herramienta se utiliza para el diseño de circuitos electrónicos y eléctricos,
simulación, prototipado y produccion. El proyecto gEDA se inició apartir de las
herramientas EDA que eran para UNIX, gEDA inicialmente se desarrollaron para
GNU/Linux, pero se esta empezando a desarrollar para otras plataformas UNIX.
gEDA se asemejaría al orCAD o al PSPICE. Contempla una amplia librería de
componentes. Una de las ventajas que tiene la última versión es la de poder
exportar el circuito hecho con gschem al PCB, pudiendo de esa forma generar la
placa de circuito impreso.
www.bulma.net/pdf.phtml?nIdNoticia=1161
PCB (X11 Interactive Printed Circuit Board layout system): PCB es una
herramienta para diseñar Placas de Circuito Impreso, nos permite generar el
fotolito precio antes de insolar la placa para despues revelarla.
http://pcb.ece.jhu.edu/
9
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA VIPEC: es un analizador de circuitos electricos y electronicos, parte de un fichero
de
texto
en
el
cual
describimos
el
circuito
electrico.
Le
asignamos el rango de frecuencias y caracteristicas del circuito. Generando como
resultado graficas y tablas correspondientes a la simulacion.
http://vipec.sourceforge.net/
TKGate: TKGate es un editor grafico y simulador de circuitos digitales,
desarrollado con Tcl/TK. Incluyendo componentes basicos como puertas
logicas (AND, OR, XOR, NAND, etc) Modulos estandares como sumadores,
multiplicadores, registros, memorias, etc y finalmente transistores MOS.
http://www.tkgate.org/
Xcircuit: Es un programa que permite dibujar circuitos eléctricos (aunque puede
ser utilizado también para dibujar otras cosas). Es liviano, fácil de usar y produce
resultados con calidad profesional y en formato EPS, por lo que resulta ideal para
incluir circuitos en documentos LaTeX. También permite generar archivos Spice
para simular el circuito.
http://bach.ece.jhu.edu/~tim/programs/xcircuit/
SPICE es un acrónimo inglés de Simulation Program with Integrated Circuits
Emphasis (Programa de simulación con énfasis en circuitos integrados). Fue
desarrollado por la Universidad de California, Berkeley en 1975 por Donald
Pederson. Es un estándar internacional cuyo objetivo es simular circuitos
electrónicos analógicos compuestos por resistencias, condensadores, diodos,
transistores, etc. Para ello hay que describir los componentes, describir el circuito
y luego elegir el tipo de simulación (temporal, en frecuencia, en continua,
parámetrico, Monte Carlo...).
http://www.sqi.gu.edu.au/spice/
http://www.imse.cnm.es/~rocio/DOCs_GRAL/SPICE.pdf
En 1984 nace de manos de MicroSim Corporation la primera adaptación para
ordenadores personales: PSpice. Desde entonces, PSpice ha ido renovándose
continuamente. Versiones ampliamente extendidas de PSpice son la 8.0 (última
desarrollada por MicroSim) y la 9.1 (primera tras la fusión de OrCAD y MicroSim),
hasta llegar a la 9.2, la última en el mercado. Esta revisión del simulador es la
primera desde la fusión de Cadence y OrCAD.
http://www.imse.cnm.es/~rocio/DOCs_GRAL/Design_Eval_8.pdf
10
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Electronic Workbench: Electronics Workbench brinda el software de captura
esquemática y de simulación de circuitos. Se ecuentra Disponible como
herramientas de diseño autónomas o como parte de un conjunto integral. El
producto incluye software para captura de esquemáticos, simulación de circuitos
(SPICE, VHDL y cosimulación patentada), diseño de PCBs y auto enrutado.
Electronics Workbench reduce drásticamente el tiempo de desarrollo y creación de
PCBs, con mayor precisión y con mayor costo-beneficio que otros paquetes de
diseño; cada circuito que se dibuja está listo automáticamente para su simulación,
de esta manera se puede comenzar pruebas en la etapa más temprana de su
diseño.
http://www.interactiv.com/
Altium Designer 6. Altium Designer es un sistema unificado, que incorpora todas
las tecnologías y capacidades necesarias para el comple desarrollo de productos
electrónico; se ha fortalecido y mejorado las áreas del sistema de diseño de PCBs,
FPGAs y múltiples aplicaciones para diseño de productos electrónicos
http://www.software-shop.com/Productos/Altium/altium.html
Proteus: es un programa para simular circuitos electronicos complejos integrando
inclusive desarrollos realizados con microcontroladores de varios tipos, en una
herramienta de alto desempeño con unas capacidades graficas impresionantes.
http://www.frino.com.ar/proteus.htm
Orcad: Es el programa por excelencia para la creación de circuitos. Su uso es
extremadamente sencillo (siempre y cuando se sepa lo que se quiere hacer) ya
que es muy intuitivo: plasma el circuito con sus componentes, y simula lo que se
desea obtener.
http://es.geocities.com/siderio_orion/Orcad/Contenido.htm
http://www.cadence.com/products/orcad/index.aspx
Matlab: es la abreviatura de Matrix Laboratory (laboratorio de matrices). Es un
programa de análisis numérico creado por The MathWorks en 1984.
http://www.tecnun.es/asignaturas/Informat1/AyudaInf/aprendainf/matlab60/matlab6
0.pdf
11
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 3. Sistemas operativos
Los sistemas operativos hacen parte del software que se requiere para el
funcionamiento y administración de los recursos de un computador, están
compuestos por una serie de rutinas que soportan la ejecución de otros
programas; para cumplir con estas tareas, es importantísimo que provean una
interfaz que permita la comunicación con el usuario, en parte y gracias a esta
última necesidad surgieron los sistemas operativos. Este tipo de software permite
entonces al usuario de un computador, operarlo de manera práctica.
Existen básicamente dos tipos de entornos en los cuales el usuario puede emitir
dichas instrucciones: un entorno o interfaz de línea de comando y una interfaz
gráfica
Interfaz de Línea De Comandos: Esta interfaz se caracteriza porque el usuario
escribe los comandos o instrucciones utilizando un lenguaje de comandos
especial. Los sistemas con interfaces de líneas de comandos se consideran más
difíciles de aprender y utilizar que los de las interfaces gráficas. Sin embargo, los
sistemas basados en comandos son por lo general son programables, lo que les
otorga una flexibilidad que no tienen los sistemas basados en gráficos carentes de
una interfaz de programación.
Interfaz gráfica del usuario: Este entorno permite al usuario elegir comandos,
iniciar programas y ver listas de archivos y otras opciones a través de
representaciones visuales (iconos) y listas de elementos del menú. Las
selecciones pueden activarse bien a través del teclado o del ratón.
Funciones De Los Sistemas Operativos
•
•
•
•
Interpretar los comandos que permiten al usuario comunicarse con el
ordenador.
Coordinar y manipular el hardware de la computadora, como la memoria,
las impresoras, las unidades de disco, el teclado o el ratón.
Organizar los archivos en diversos dispositivos de almacenamiento,
secundario como discos flexibles, discos duros, memorias usb, discos
compactos, etc.
Gestiona los errores de hardware y la pérdida de datos.
12
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA •
•
Servir de base para la creación del software logrando que equipos de
marcas distintas funcionen de manera análoga, salvando las diferencias
existentes entre ambos.
Configura el entorno para el uso del software y los periféricos.
Clasificación: Desde el punto de vista administrativo, podemos clasificar su labor
en 3 áreas así:
•
A nivel de Usuario
o Monousuario: El sistema operativo solamente recibe las ordenes y
ejecuta los programas de un solo usuario.
o Multiusuario: Aquí el sistema operativo da la posibilidad de la
ejecución de un programa se haga desde diferentes usuarios de
igual forma con los recursos.
•
A nivel de tareas:
o Monotarea: Significa que el sistema operativo ejecuta solamente un
proceso en un determinado momento, esto no significa que las
labores propias del sistema operativo se vean afectadas en cuanto a
su ejecución, hace referencia a tareas no propias del sistema
operativo.
o Multitarea: Varias tareas pueden ejecutarse al mismo tiempo, esta
función la logra alternando los recursos entre las tareas que los
solicitan dando la sensación de una ejecución simultánea.
•
Manejo de recursos:
o Centralizado: Los recursos del computador, como su nombre lo
indica, están centralizados de forma que solo son asequibles por un
solo usuario en un solo instante de tiempo
o Distribuido: A diferencia del anterior los recursos de mas de un
computador en el mismo instante de tiempo.
13
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Ejemplos De Sistemas Operativos: A continuación se da un listado de sistemas
operativos clasificados en las tres grandes familias presentes en el mercado.
Familia Windows
•
•
•
•
•
•
•
•
•
•
•
•
Windows 95
Windows 98
Windows ME
Windows NT
Windows 2000
Windows 2000 server
Windows XP
Windows Server 2003
Windows CE
Windows Mobile
Windows XP 64 bits
Windows Vista (Longhorn)
Familia Macintosh
•
•
•
•
Mac OS 7
Mac OS 8
Mac OS 9
Mac OS X
Familia UNIX
•
•
•
•
•
•
•
•
•
•
AIX
AMIX
GNU/Linux
GNU / Hurd
HP-UX
Irix
Minix
System V
Solaris
UnixWare
14
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA En el mercado básicamente podemos destacar dos de los sistemas operativos
mas utilizados que son: GNU/Linux y Windows
Lección 4. Características del sistema operativo gnu/linux
En 1969 aparece UNIX, como resultado del trabajo de Ken Thompson, de Bell
Labs, y posteriormente en conjunto con Dennis Ritchie y otros miembros del Bell
Labs se obtuvo l primera versión de UNÍS, que estaba desarrollada en
ensamblador, que luego fue escrita en lenguaje C lo que la hizo portable. Este se
distribuye entre la comunidad universitaria con el nombre de POSIX
Una de las características principales de este Sistema Operativo es el sistema de
tiempo compartido, esto permite a varios usuarios utilizar el sistema
simultáneamente, sin que se intervengan entre sí y sin notar la presencia de los
demás. Los párrafos siguiente hacen describen las principales características de
GNU/Linux, fueron tomadas de http://www.adrformacion.com/cursos/linux/leccion1/tutorial3.html Multitarea. Linux desde su concepción fue diseñado como un sistema
operativo multitarea, lo que le permite ejecutar varios programas a la vez,
de forma que no tiene que esperar a que termine uno para empezar otro. La
multitarea está controlada por el Sistema Operativo (S.O.) y no por las
aplicaciones, por lo que es muy difícil que el fallo de un programa "cuelgue"
el sistema por una mala utilización de los recursos del equipo.
32 bits reales. Linux permite aprovechar toda la potencia del procesador,
corre a 32 bits reales en un procesador intel o amd, y a 64 bits en los
nuevos procesadores que están llegando al mercado. Esto le confiere al
sistema rapidez, eficacia, seguridad y fiabilidad.
Multiusuario. Linux es un sistema operativo capaz de responder,
simultáneamente, a las solicitudes de varios usuarios que empleen el
mismo ordenador, incluso con necesidades distintas. Además proporciona
los elementos necesarios para garantizar la seguridad y privacidad de los
datos entre los diferentes usuarios.
POSIX. es un estándar de la industria que asegura una calidad mínima en
ciertas partes del S.O. y asegura la compatibilidad a nivel de código. De
15
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA esta forma los programas POSIX que funcionan en un UNIX no tienen
ningún problema para compilarse y ejecutarse en Linux.
Estabilidad. Linux es robusto, por lo que si un programa falla no
interrumpirá el trabajo de los demás. Entraremos al sistema,
desbloquearemos el programa y podremos seguir utilizando el sistema sin
ningún problema. Esta característica permite que el sistema funcione
durante periodos muy largos de tiempo sin necesidad de parar y volver a
arrancar.
Soporte. Si compras una de las distribuciones de Linux dispondrás de
soporte de las empresas que los distribuyen (Red Hat, Mandriva, SUSE,
Ubuntu, etc.) o de otras muchas que se han especializado en Linux (desde
gigantes como IBM o HP hasta empresas españolas como Activa Sistemas,
Esware o Andago). Si aun así no lo ves claro aquí tienes una iniciativa que
permite localizar empresas que dan soporte a aplicaciones de software
libre. http://www.findopensourcesupport.com
Es libre. Como disponemos del código fuente, podemos hacer cualquier
modificación sin tener que esperar a que alguien nos envíe un "Service
Pack" para solucionarlo. En el caso de que no sepamos arreglar el fallo
podremos contratar a cualquier empresa para que lo arregle, aún cuando la
empresa que nos vendió el programa haya cerrado o no le interese resolver
nuestro problema, ya que se conoce el código fuente.
Adaptación. Linux es un S.O. que evoluciona rápidamente adaptándose a
las novedades del mercado y solucionando rápidamente los problemas que
puedan surgir, además se puede personalizar tanto, que ahora mismo hay
comunidades autónomas como Madrid (Max), Valencia (Lliurex) o
Extremadura (Linex) que han hecho su propia distribución con fines
educativos ( quién sabe si después de este curso te animas a crear la
tuya!!!!
Sistema de archivo. Linux puede operar con una gran variedad de
sistemas de archivos, pudiéndolos leer y operar con ellos. Por ejemplo:
FAT, VFAT, OS2/FS, ISO9660, ReiserFS, etc.
Multiplataforma. Linux es soportado por los sistemas informáticos
independientemente del microprocesador que lleven instalado (386, 486,
16
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Pentium, Pentium Pro, Pentium II, Pentium III, Pentium 4, AMD 64, Amiga, ,
Atari, Alpha, PowerPC, SPARC, RISC, etc...).
Red. Linux fue desarrollado desde sus comienzos para trabajar en red. Su
protocolo principal es TCP/IP, aunque soporta una gran variedad de
protocolos como SLIP/PPP, PLIP, NFS, Telnet, TNP, SMTP, IPX,
AppleTalk, etc. Además es capaz de mediar entre todo tipo de redes,
permitiendo trabajar en red con equipos que utilicen sistemas operativos
como Windows 98 o XP sin ningún problema.
Entorno Gráfico. Linux puede trabajar con o sin entorno gráfico. Por ejemplo
para funcionar de manera óptima en equipos con poca memoria o en
servidores donde el entorno gráfico consume recursos innecesariamente. Si
por el contrario queremos usar un entorno de ventanas, existen un sinfín de
gestores (ICEwin y otros) y de entornos de escritorio (KDE y GNOME son
los más populares) que permiten al usuario doméstico trabajar de una forma
intuitiva.
Distribuciones. Una distribución es un sistema operativo GNU/Linux unido
a una serie de aplicaciones de configuración y de usuario "empaquetadas"
juntas. Todas tienen en común el núcleo del sistema. Las diferencias entre
unas y otras son las herramientas de configuración que utilizan y las
diferentes aplicaciones que se incluyen junto al sistema operativo. Estas
son algunas de las distribuciones mas comunes que hay en el mercado:
Knoppix, http://www.knoppix-es.org/
Red Hat, http://fedora.redhat.com/ o http://www.redhat.es/fedora/
Debian, http://www.gnu.org, http://www.debian.org y
http://www.es.debian.org
SUSE, http://www.suse.com, http://www.novell.com/es-es/linux/suse/
Slackware, http://www.eslack.org/
Gentoo, http://www.gentoo-es.org
Ubuntu, http:// www.ubuntu.com
Mandriva (antes Mandrake), http://www.mandriva.com/es ,
http://www.mandrakefacil.org
En el siguiente enlace puede encontrar un manual en el que debe abordar el
manejo de tareas cotidianas como crear carpetas, copiar archivos, instalar
software. http://www.ant.org.ar/cursos/curso_intro/book1.html
17
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 5. Características del sistema operativo Windows
El sistema operativo Windows inicio como el sistema operativo D.O.S (Disk
Operating System). En sus principios fue desarrollado junto con la empresa IBM,
pero diferencias entre las partes hicieron que no fuera un lanzamiento en conjunto.
Por el contrario, cada una de las empresas presentó "su" sistema operativo: PCDOS (IBM) y MS-DOS (Microsoft).
D.O.S. se presentaba como una consola o pantalla de texto con una línea de
comandos que nos indicaba en qué directorio nos encontrábamos y a partir de allí
se digitaban las ordenes a ejecutar. La última versión del producto como tal fue la
6.22, posteriormente apareció Windows 3.11 que en su corazón incluía la versión
de DOS lo que lo convertía en un entorno operativo mas que un sistema operativo
como ta, posteriormente apareció Windows 95, Windows 98/NT donde se eliminó
el DOS como sistema independiente y en cambio aparece como un emulador de
éste, además se incluía el manejo especializado de redes. Dentro de su evolución
salió al mercado Windows 2000/Windows ME, orientado a empresas; Las dos
últimas versiones en el medio son Windows XP SP2 (hace énfasis en los drivers) y
Windows Vista.
A continuación se muestra algunas de las principales características de Windows
XP que fueron tomadas de:
http://descargas.abcdatos.com/tutorial/descargarL11118.html
Protección de la red. Todos los ordenadores conectados a Internet
necesitan protección frente a ataques basados en la red, como los del
gusano Blaster. Esta protección es especialmente importante para los
clientes domésticos conectados a Internet a través de un módem por cable,
una línea ADSL o una conexión telefónica, así como para los usuarios de
portátiles que no siempre están protegidos por un firewall corporativo.
Navegación. web más segura. Para muchos clientes, la Web es algo que
proporciona código malicioso y pop-ups indeseados. Los clientes también
están preocupados por los sitios maliciosos que ofrecen descargas
diseñadas para defraudarles o dañar sus ordenadores. Todos los clientes
corren este riesgo, especialmente cuando navegan por sitios web con los
que no están familiarizados. Las tecnologías de seguridad ofrecidas por
Internet Explorer permiten una navegación web más segura, a la vez que
mantienen intacta la experiencia de navegación completamente funcional,
tanto para usuarios domésticos como corporativos de Windows XP.
18
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Protección de la memoria. Alguna aplicación maliciosa puede beneficiarse
de la sobrescritura de búfer para atacar a un ordenador. La sobrescritura de
búfer es una vulnerabilidad del software que copia demasiados datos,
sobrescribiendo áreas de memoria y permitiendo la ejecución de código
arbitrario. Los atacantes podrían aprovecharse potencial y remotamente de
esta vulnerabilidad en cualquier ordenador conectado a Internet o a
cualquier otra red (en el hogar o en la oficina) a través de ADSL, cable o
conexión telefónica. Aunque no hay una técnica sencilla para eliminar
completamente este tipo de vulnerabilidad, Microsoft está empleando
tecnologías de seguridad para reducir la probabilidad y el riesgo de un
ataque de diversas formas. Por ejemplo, Microsoft ha vuelto a compilar todo
el código modificado desde el lanzamiento de Windows XP utilizando el
último compilador Visual Studio® y el flag “/GS” para reducir la posibilidad
de ciertas vulnerabilidades por sobrescritura de búfer.
Correo electrónico y mensajería instantánea más seguros. El correo
electrónico es una vía común por la que se sufren ataques maliciosos para
infectar el ordenador y extender la infección. Las nuevas tecnologías de
seguridad de Microsoft hacen más seguros el correo electrónico y la
mensajería instantánea ayudando a detener la propagación de virus (como
Sobig.F). Este incremento de la seguridad es más aplicable a los usuarios
domésticos y pequeñas empresas que utilizan Outlook® Express o la
mensajería instantánea (IM) Windows Messenger.
Mejoras adicionales. Windows XP Service Pack 2 incluye mejoras
adicionales tendentes a proporcionar al usuario las últimas actualizaciones
tecnológicas, entre las que se incluyen las siguientes:
• Actualización automática. SP2 será más conveniente para el cliente
activando la actualización automática, que descargará e instalará
automáticamente las actualizaciones más importantes.
• Windows Media Player 9 Series. Windows Media® Player 9 Series ha
pasado por una revisión integral de la seguridad, lo que ha dado como
resultado un conjunto robusto de parámetros de seguridad (disponibles
desde el menú Herramientas seleccionando Opciones) que permiten al
usuario controlar más fácilmente los servicios disponibles en el reproductor.
• Actualización bluetooth. Windows XP SP2 incluye un soporte actualizado
para Bluetooth®, lo que permite al cliente beneficiarse de los últimos
dispositivos inalámbricos, incluyendo ratones y teclados inalámbricos,
impresoras inalámbricas y conexiones con teléfonos móviles y PDA.
19
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA • Cliente de red de área local (LAN) inalámbrica unificada. El nuevo cliente
LAN inalámbrico funcionará con un amplio abanico de inalámbricos de
ultimísimo generación (hot spots). Permite al cliente conectar con estos
últimos sin tener que instalar o actualizar un cliente de terceros. El cliente
también se beneficia de una interfaz de usuario nueva que permite una
desconexión más sencilla de los hot spots.
Puede ampliar este conjunto de características en
https://www.microsoft.com/latam/windowsxp/pro/evaluacion/caracteristicas.asp
En el siguiente enlace puede encontrar un manual introductoria al manejo de
Windows XP, http://www.unav.es/cti/manuales/pdf/IntroWinXP.pdf
CAPÍTULO 2: DISEÑO Y SIMULACIÓN DE CIRCUITOS DC,AC
Introducción. En este capítulo se da la descripción del uso de dos aplicativos
para el diseño y simulación de circuitos electrónicos, esto a través de ejemplos
que parten de lo básico hasta un ejercicio completo donde se muestran los
resultados de la simulación y se hacen las descripciones paso a paso. En cada
lección se hace uso de pantallazos que muestran las ventanas que el estudiante
debe observar en el proceso de diseño y simulación de circuitos electrónicos para
problemas determinados.
Lección 6. Dispositivos electrónicos e interconexión circuit maker
Entorno General
Como se menciono en el capitulo anterior existen múltiples programas de
simulación de circuitos de manejo comercial y de manejo libre.
Dentro del software propietario y uno de los mas utilizados hasta hace poco dentro
de sus versiones estudiantiles se encuentra Circuit Maker que es un software de
simulación de circuitos AC y DC
A continuación se da una breve descripción del entorno de este programa
20
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
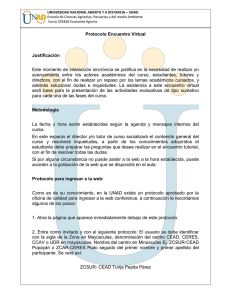
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 4. Entorno general de trabajo Circuit Maker
Panel
Barra de
Herramientas
Barra de
Menú
Diagrama
Esquemático
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Barra de Herramientas. La barra de herramientas se puede catalogar como una
representación grafica o acceso directo a las funciones de la barra de menú más
empleadas durante el desarrollo de una actividad
Los elementos que conforman esta barra y su descripción o funcionamiento se
muestran en seguida.
Figura 5. Barra de Herramientas Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
21
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Despliegue.
Panel: Muestra o esconde el panel, el panel estará visible de forma
predeterminada al iniciar la aplicación, al remover el panel se aumenta la
visibilidad del área de dibujo.
Manejo del documento.
Nuevo documento: Genera un nuevo esquemático, si se esta
trabajando en otro proyecto y se presiona este botón se le pedirá que guarde su
trabajo para empezar a trabajar en el nuevo proyecto.
Abrir documento: Abre un esquemático (diagrama del circuito)
existente. De igual forma que Nuevo documento, si se esta trabajando con un
proyecto antes de abrir el esquemático requerido se le pedirá guardar el
documento.
Guardar documento: Guarda
esquemático con el que se esta trabajando.
en
una
ruta
determinada
el
Imprimir: Imprime el esquemático que se encuentre en el área de
trabajo.
Herramientas de dibujo.
Flecha: Esta herramienta se encarga de arrastrar y editar los
componentes en el esquemático, dando la posibilidad de cambiar los valores
propios del elemento. Esta herramienta permite la manipulación del alambrado.
22
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Herramienta de alambrado: Con la herramienta alambrado, podemos
colocar alambres para conectar los dispositivos entre si y presionando la tecla
SHIFT mientras se alambra se generara un alambrado tipo BUS de datos.
Texto: Con esta herramienta se puede colocar un texto en el
esquemático.
Herramienta de borrado: Permite borrar componentes, texto y
alambrados; si se presiona la tecla SHIFT se eliminan pequeños segmentos de
alambre, de tal forma que se pueda corregir un detalle sin necesidad de eliminar
todo un alambrado.
Lupa: Da una vista del esquemático que va del 10% al 1000%.
Ajustar a la ventana: Da la ampliación o reducción correspondiente
de tal forma que se pueda ver al esquemático completo en la pantalla.
Herramientas de manejo de componentes.
Rotar: Rota en un ángulo de 90° a uno o varios componentes
seleccionados.
Reflejar: Refleja uno o más elementos seleccionados.
23
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Dispositivos Electrónicos
Figura 6. Dispositivos Electrónicos Circuit Maker
En el panel frontal se pueden encontrar todos los dispositivos
incluidos en CIRCUITMAKER, estos se encuentran contenidos
en diferentes categorías en las que se hace énfasis al tipo de
dispositivos a las que pertenecen.
Por ejemplo en la categoría .GENERAL se encuentran los
elementos de uso más común: Elementos activos
(Transistores y Diodos), elementos pasivos (resistencias,
bobinas y condensadores), elementos para energizar circuitos
(baterías, fuentes de voltaje y corriente) e instrumentos
(Generador de señales, multímetro y generador de secuencias
de datos).
En la figura se observan las demás categorías aparte de las
mencionadas, por ejemplo; en ACTIVE COMPONENTS se
encuentran transistores (NPN, PNP), diodos de diferentes
tipos y funciones (Rectificador, ZENER, Puentes de diodos,
VARACTOR, etc.), otros tipos de transistor como el FET y
MOSFET.
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
En la categoría de CAPACITORS se incluyen diferentes tipos de condensadores
(polarizado, no polarizado y variable), en la categoría RESISTORS, de igual forma
se pueden encontrar diferentes tipos o presentaciones de este componente
(Resistencia, resistencia variable, etc.).
En la siguiente tabla se observan algunos de los componentes de Circuit Maker
24
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 2. Componentes electrónicos en Circuit Maker
Resistor
Resistor Variable
Condensador
Condensador
polarizado
Condensador
variable
C1
1uF
C2
1uF
+
C3
1uF
Puente
Rectificador
Diodo Led
R1
1k
R2
10k 40%
Inductor
Inductor variable
Diodo
L1
1uH
L2
1uH
D1
DIODE
Diodo Shottky
Diodo Varactor
Diodo Zener
D3
SCHOTTKY
D5
VARACTOR
D6
ZENER
Transistor
Darlington
FET canal N
FET canal P
Q3
NJFET
Q3
NPN1
Parejas de
transistores
V2
PENTODE
IGBT
Q1
NIGBT
SCR
SCR1
SCR
PUT1
PUT
Tetrodo
Amp Operacional Fuente de voltaje
V3
TETRODE
D4
LED1
Transistor PNP
Q1
NPN
PUT
Q2
UJT
Pentodo
Transistor NPN
Q4
PJFET
UJT
U1
SSM2210
D2
BRIDGE
U3
IDEAL
+
Vs1
10V
Q2
PNP
IGBT
Q1
PIGBT
TRIAC
Q1
TRIAC
Fuente de
corriente
Is1
100mA
-
Fuente
dependiente
IcIs1
1
Fuente
dependiente
+
VCO
+
+
Generador de
funciones
-
F1
1A
V4
V2
-
V1
-1/1V
+
Fusible
-
-
1kHz
Conector
conector
Transformador
Rele
PLL
Cristal
T1
RLY1
5VCOIL
U2
PLL
XTAL1
1.000MHZ
Sig
Comp
Vout
Vss
25
Vdd
PC
Vin
Dem
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 2. Componentes electrónicos en Circuit Maker (Continuación)
Motor paso a
paso
Motor DC
M2
M1
1
2
A
3
4
B
Parlante
Antena
Cable trenzado
ANT1
CABL1
SPK1
8
Cable coaxial
Opto acoplador
CABL2
U1
OPTOISO
Multimetro
NO DATA
DC V
Fuente: Construida a partir de imágenes de Circuit Maker versión Trial Juan
Monroy (2007).
Interconexión de Dispositivos. Una vez se halla seleccionado el componente
que se desea colocar en el área de trabajo de alguna de las librerías mencionadas
anteriormente, el elemento se visualizara en la parte superior del panel y en la
parte inferior aparecerán los modelos disponibles del dispositivo para que sea
seleccionado. Por ejemplo si se desea un transistor NPN, éste se selecciona de la
librería, aparece visualizado el símbolo y las referencias disponibles, por ejemplo
2N3370, 2N3458 etc. para escoger el modelo deseado
Figura 7. Selección de dispositivos Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
26
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Los dispositivos pueden ser colocados en el área de trabajo, o haciendo doble clic
sobre el elemento de la categoría y desplazando el Mouse o presionando el botón
PLACE.
Una vez colocado el elemento en el área de trabajo, se pueden modificar las
propiedades del mismo haciendo doble clic sobre el mismo o dando clic derecho e
ingresando a la opción DEVICE PROPERTIES
Cuando se desea hacer el montaje de un circuito es importante mantener una
proporción espacial de éste para ubicar cada uno de los elemento que lo
componen, sin embargo esto no es una camisa de fuerza, ya que la mayoría de
los programas permiten mover y reubicar los elementos, incluso si ya se han
interconectado ajustando, dichas conexiones de manera automática.
En la siguiente figura se observan el área de trabajo con los componentes de un
circuito amplificador.
Figura 8. Dispositivos en área de trabajo Circuit maker
V1
10V
+V
R2
1k
R3
1k
Q1
NPN
R1
1k
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Como se observa cada uno de los elementos que forman el amplificador no se
ubicaron esperando dejarlos en su posición final, pero si de forma tal que no
queden sobrepuestos, para reubicarlos se utiliza el Mouse haciendo clic sostenido
27
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA con el botón izquierdo justo sobre el elemento que se desea mover y se
arrastrándolo a la posición deseada. En ocasiones es necesario rotar los
componentes, tarea que fácilmente se puede realizar mediante la opción ROTATE
que aparece dando clic derecho sobre el elemento.
Para realizar la interconexión se utiliza la herramienta alambrar
, para empezar
el alambrado se hace click sobre este icono y se ubica el puntero del mouse en
una de las terminales del componente, al hacer esto aparecerá un recuadro rojo
alrededor de la terminal seleccionada, como se observa en la siguiente figura.
Figura 9. Terminal de una componente Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
A continuación se mantiene presionado el botón izquierdo del mouse dirigiéndolo
a la terminal del otro componente donde se desea hacer la conexión y soltándolo
al realizar el contacto. Es importante mencionar que si por error se realiza una
interconexión entre dos elementos que originalmente no están conectados, es
posible eliminar dicha conexión haciendo clic sobre ella y presionando la tecla
delete. Una vez se hacen las interconexiones debe observarse el circuito como se
ve a continuación.
Figura 10. Circuito amplificador
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
28
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Como se observa fue necesario reubicar las resistencias, rotarlas y cambiar sus
propiedades, al igual que se modifico las propiedades de la fuente DC.
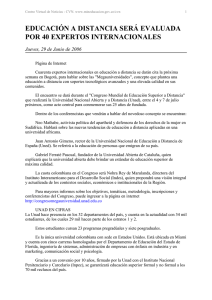
Lección 7. Dispositivos electrónicos e interconexión Proteus
Entorno General. Otro de los software tipo propietario empleado con gran
frecuencia es el Proteus, a continuación se da una breve descripción del entorno
de trabajo de este programa
Figura 11. Entorno general de trabajo Proteus.
Barra de
Herramientas
Vista Completa
Lista de
Cto
Componentes
Barra de
Menú
Diagrama
Esquemático
Controles para
Simulación
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Barra de Herramientas. La barra de herramientas se puede catalogar como una
representación grafica o acceso directo a las funciones de la barra de menú más
empleadas durante el desarrollo de una actividad
Los elementos que conforman esta barra y su descripción o funcionamiento se
muestran en seguida.
29
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 12. Barra de Herramientas Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Manejo del documento.
Nuevo documento: Genera un nuevo esquemático, si se esta
trabajando en otro proyecto y se presiona este botón se le pedirá que guarde su
trabajo para empezar a trabajar en el nuevo proyecto.
Abrir documento: Abre un esquemático (diagrama del circuito)
existente. De igual forma que Nuevo documento, si se esta trabajando con un
proyecto antes de abrir el esquemático requerido se le pedirá guardar el
documento.
Guardar documento: Guarda
esquemático con el que se esta trabajando.
en
una
ruta
determinada
el
Importar o exportar diagrama esquemático
Imprimir: Imprime el esquemático que se encuentre en el área de
trabajo.
Define área a imprimir
30
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Re-dibuja el diagrama esquemático
Visualiza/Oculta la malla guía de trabajo
Habilita/Deshabilita
la
especificación
manual
del
origen
de
coordenadas
Centra en esquemático alrededor de la posición del cursor indicada.
Acercamiento con cada pulsación del Mouse
Disminuye la escala de la ventana de edición luego de hacer clic
Muestra el esquema completo existente en la ventada de edición
Amplia la zona seleccionada
Herramientas de dibujo.
Modo selección: Esta herramienta se encarga de arrastrar y editar los
componentes en el esquemático, dando la posibilidad de cambiar los valores
propios del elemento. Esta herramienta permite la manipulación del alambrado.
31
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Modo Componente: Da acceso a las librerias de componentes que se
pueden utilizar dentro del circuito a simular, permite colocar, orientar y editar
componentes en la ventana de dispositivos.
Define un punto de unión, enlace o empalme, si se desea eliminar, se
hace doble clic con el botón derecho del mouse sobre él.
Activa el modo de etiqueta de alambrado, permitiendo así bautizar
puntos del alambrado con ciertos nombres; existen unos nombres reservados
como: VCC, VDD,GND,VSS, ya que identifican los terminales de alimentación y
tierra.
Ingresa al modo edición de texto (comentarios), para generar, editar
y mover bloques de texto.
Modo de Alambrado, permite interconectar los elementos dentro del
circuito electrónico.
Permite situar y editar sub-circuitos en el diseño.
Activa el modo de terminales, y ubica estas terminales en la ventana
de lista de componentes.
Activa el modo de pines de dispositivos, y ubica estos tipos de pines
en la ventana de lista de componentes.
32
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Activa el Modo Grafico, para visualizar señales indicadas en el
circuito.
Activa en el listado de Componentes los generadores disponibles
para usar en le circuito a simular.
Permite
respectivamente.
trabajar
con
el
probador
de
voltaje
y
corriente
Ubica en el listado de componentes los instrumentos virtuales que es
posible utilizar en el circuito electrónico.
Dispositivos Electrónicos
Figura 13. Dispositivos electrónicos Proteus
1. Componentes 2. Pick from Libraries Fuente: Tomado pantallazo Proteus versión Trial (2009)
33
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Para ingresar al listado de componentes disponibles para el diseño y simulación
de circuitos electrónicos, primero debe dar clic en el icono de componentes y
posteriormente en el botón (P) “Pick From Libraries”, una vez se da clic aparece
un listado de los elementos disponibles organizados por categorías, se selecciona
una categoría y la parte inferior aparece un listado de subcategorías, se elige una
de ellas y aparece un listado componentes en la parte central de la ventana. Por
ejemplo si deseamos insertar el transistor genérico debemos elegir la Categoría
Transistor, la subcategoría Generic y el dispositivo NPN device
Figura 14. Listado de componentes Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
34
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Interconexión de Dispositivos. Se debe seleccionar cada uno de los elementos
a utilizar desde la ventana de componentes, a medida que se eligen, estos van
generando una lista en la ventana de componentes, de allí deben ser elegidos
para ubicarlos en el área de trabajo.
La selección se hace dando clic en el listado de componentes, al elemento a
insertar, se desplaza el cursor al área de trabajo y se de clic para que aparezca la
sombra del elemento y se desplaza el cursor hasta ubicar la posición donde
aparecerá el componente en el circuito, y se imprime allí, dando una vez mas clic;
esto se muestra en el siguiente grafico
Figura 15. Interconexión de dispositivos Proteus
Clic en el listado
Clic en el área de trabajo Desplazar el cursor y hacer clic
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Mientras no se elija otro componente, cada vez que haga clic aparecerá la sombra
del elemento y podrá insertar tantos como desee.
Una vez estén dispuestos los elementos en el área de trabajo, se pueden
modificar las propiedades del mismo haciendo doble clic sobre el mismo o dando
clic derecho e ingresando a la opción “Edit Properties”
35
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Cuando se desea hacer el montaje de un circuito es importante mantener una
proporción espacial de éste para ubicar cada uno de los elemento que lo
componen, sin embargo esto no es una camisa de fuerza, ya que la mayoría de
los programas permiten mover y reubicar los elementos, incluso si ya se han
interconectado ajustando, dichas conexiones de manera automática.
En la siguiente figura se observan el área de trabajo con los componentes de un
circuito amplificador.
Figura 16. Dispositivos en área de trabajo Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Como se observa cada uno de los elementos que forman el amplificador no se
ubicaron esperando dejarlos en su posición final, pero si de forma tal que no
queden sobrepuestos, para reubicarlos se utiliza el Mouse haciendo clic se elige el
elemento, luego haciendo clic pero sostenido, se arrastra a la posición deseada.
En ocasiones es necesario rotar los componentes, tarea que fácilmente se puede
realizar mediante la opción ROTATE CLOCKWISE (rotar sentido horario),
ROTATE ANTI-CLOCKWISE (rotar sentido anti-horario) que aparece dando clic
derecho sobre el elemento.
Para realizar la interconexión se utiliza la herramienta Bus
, para empezar el
alambrado se hace click sobre este icono y se ubica el puntero del mouse en una
de las terminales del componente, al hacer esto aparecerá un recuadro rojo
alrededor de la terminal seleccionada, como se observa en la siguiente figura.
36
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 17. Terminal de una componente Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
A continuación se hace clic en la terminal, presionado el botón izquierdo del
mouse y se desplaza dirigiéndolo a la terminal del otro componente donde se
desea hacer la conexión y se hace clic en el contacto. Es importante mencionar
que si por error se realiza una interconexión entre dos elementos que
originalmente no están conectados, es posible eliminar dicha conexión haciendo
clic derecho sobre ella y seleccionando “delete wire” del menú contextual que
aparece. Una vez se hacen las interconexiones debe observarse el circuito así:
Figura 18. Circuito Amplificador
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Como se observa fue necesario reubicar las resistencias, rotarlas y cambiar sus
propiedades, al igual que se modifico las propiedades de la fuente DC.
37
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 8. Guardar y cargar circuitos circuit maker, proteus
Guardar (Circuit Maker). Una vez tenemos el circuito terminado, podemos
salvarlo utilizando la opción SAVE o SAVE AS del menú File tal como se observa
en la siguiente figura
Figura 19. Guardar circuitos Ciruit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Realice el montaje que se ve en la anterior figura y grabe dicho circuito para
simularlo posteriormente con las indicaciones dadas en el próximo tema.
Una vez se ha elegido la opción save se despliega la ventana que nos permite
seleccionar la ruta donde se guardará el archivo, se coloca el nombre y se da clic
en guardar, es importante notar que este archivo se almacena con extensión .ckt
38
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 20. Seleccionar carpeta Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Guardar (Proteus). Armamos el circuito mostrado a continuación, (fuentes las
encuentra dando clic en componente en “Simulator Primitives”, componente
VSOURCE, y los instrumentos en “Virtual Instruments”. Una vez tenemos el
circuito terminado, podemos salvarlo utilizando la opción SAVE DESIGN o SAVE
DESIGN AS del menú File tal como se observa en la siguiente figura
Figura 21. Guardar circuitos Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
39
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Una vez se ha elegido la opción save se despliega la ventana que nos permite
seleccionar la ruta donde se guardará el archivo, se coloca el nombre y se da clic
en guardar, es importante notar que este archivo se almacena con extensión .dsn
Figura 22. Seleccionar carpeta Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Cargar (Circuit Maker). Circuit Maker permite llamar o abrir circuitos existentes,
mediante la opción open ubicada en el menú File, como se observa en la siguiente
figura
Figura 23. Cargar circuitos Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
40
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Seleccionada esta opción, se despliega una ventana donde escogemos la ruta y
específicamente el archivo con el cual deseamos trabajar, dando clic en abrir se
carga automáticamente el circuito en el área de trabajo.
Figura 24. Seleccionar archivos Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Teniendo el archivo en el área de trabajo se pueden realizar ediciones sobre ese
circuito.
Figura 25. Ediciones de circuitos Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
41
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Cargar (Proteus). Proteus permite llamar o abrir circuitos existentes, mediante la
opción OPEN DESIGN ubicada en el menú File, como se observa en la siguiente
figura
Figura 26. Cargar circuitos Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Seleccionada esta opción, se despliega una ventana donde escogemos la ruta y
específicamente el archivo con el cual deseamos trabajar, dando clic en abrir se
carga automáticamente el circuito en el área de trabajo.
Figura 27. Seleccionar archivos Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
42
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Teniendo el archivo en el área de trabajo se pueden realizar ediciones sobre ese
circuito.
Figura 28. Ediciones de circuitos Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Leccion 9. Simulación del circuito ac/dc y ejercicios de aplicación circuit
maker
Simulación de Circuito Ac/Dc. Para simular el circuito debemos tener la totalidad
de los componentes en el área de de trabajo y deben estar alambrados
correctamente. En la siguiente figura se muestra un ejemplo de un amplificador,
antes de realizar el montaje observe cuidadosamente los elementos que lo
componen guiándose por la tabla de dispositivos que aparece para circuit maker,
determine su ubicación y agréguelos al área de trabajo, Posteriormente realice el
alambrado de forma tal que se observe así:
Figura 29. Montaje de amplificador en circuit Maker
V1
20V
+V
R3
20k
V2
-500m/500mV
R2
2k
1.105 V
AC V
C2
0.47uF
C1
1uF
Q1
NPN
R5
1k
1kHz
R4
3k
R1
220
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
43
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Para iniciar la simulación pulsamos F10 o en la barra de menú Simulación/Run.
Si el circuito se simula correctamente aparece un pantallazo como el siguiente
Figura 30. Simulación de circuitos Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
En la parte inferior de la pantalla hay dos pestañas: Operating point y Transient
Análisis. La primera nos permite observar en la pantalla los valores numéricos de
voltajes, corrientes y potencias en cualquier lugar del circuito, el punto donde
deseamos hacer la medición lo seleccionamos con la herramienta punto de prueba
. La segunda permite observar la forma de onda de una señal de voltaje,
corriente o potencia en el circuito. La selección del punto de medida se hace con
la herramienta punto de prueba.
Otra opción de simulación es el Análisis en frecuencia (Análisis de Bode), que se
activa en la barra de menú con la opción Simulation/Análisis setup, activando la
casilla A.C., allí se configuran los parámetros de frecuencia en los cuales se
realiza la simulación. Esta opción permite hacer un análisis del comportamiento
del circuito en función de la frecuencia, para ello es necesario conocer como
responden cada uno de los elementos en función de dicha frecuencia.
44
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA A continuación se muestra un ejemplo del mismo amplificador mirando su
respuesta en términos de la frecuencia.
Figura 31. Respuesta amplificador en términos de la frecuencia
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Ejercicios se Aplicación
1. Encontrar las corrientes de malla I1, I2 e I3 del siguiente circuito:
Figura 32. Ejercicio de aplicación circuit maker, mallas
R1
10
I1
R2
4
+
-
Vs1
10V
I2
R3
8
R4
5
I3
Fuente: Juan Monroy (2007)
45
R5
10
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Primero definimos el sistema de ecuaciones de malla del circuito.
22 ⋅ I 1 − 4 ⋅ I 2 − 8 ⋅ I 3 = 0
− 4 ⋅ I 1 + 9 ⋅ I 2 − 5I 3 = 10
− 8 ⋅ I 1 − 5 I 2 + 23 ⋅ I 3 = 0
Para resolver el sistema proseguimos a encontrar el determinante de la matriz A:
22
− 4 −8
Δ = − 4 9 − 5 = 2740
− 8 − 5 23
Una vez que hemos encontrado el determinante de la matriz A hallamos el valor
de cada incógnita del sistema en este caso I1, I2 e I3.
I1 =
0 −4 −8
10 9 − 5
0 − 5 23
Δ
=
1320
= 0.4848 A
2740
=
4420
= 1.61A
2740
=
1420
= 0.51A
2740
22 0 − 8
− 4 10 − 5
I2 =
I3 =
−8
0
23
Δ
22 − 4 0
− 4 9 10
−8 −5 0
Δ
46
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Los resultados se comprueban haciendo el siguiente montaje en Circuit Maker
Figura 33. Medidas tomadas con instrumentos en Circuit Maker, mallas
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
2. En el circuito de la siguiente figura calcular los VCE e IC en DC. En AC medir la
ganancia de voltaje AV
Figura 34. Ejercicio de aplicación Circuit Maker, amplificador
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
47
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tenemos que:
VTH = V1 * 22 KΩ /( 22 KΩ + 82 KΩ) = 3.8V
RTH =
IB =
22 KΩ * 82 KΩ
= 17.34 KΩ
22 KΩ + 82 KΩ
VTH − VBE
= 22 μA
RTH + ( β + 1) * RE
I C = βI B = 2.2 mA
VCE = V1 − I c RC − I C RE = 3.04 V
AV =
RC II RE
=3
RE
Haciendo el siguiente montaje podemos comprobar los resultados, observe los
datos que muestran los indicadores de corriente y voltaje
Figura 35. Medidas tomadas con instrumentos en Circuit Maker, amplificador
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
48
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Finalmente haciendo la grafica de Transient Análisis, se puede observar el voltaje
de salida, y calculando la ganancia de voltaje de este circuito como V0/ Vi y que
da como resultado 3.
Figura 36. Resultados simulación del amplificador divisor de tensión en circuit
Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Leccion 10. Simulación del circuito ac/dc y ejercicios de aplicación proteus
Simulación de Circuito Ac/Dc. El primer paso de la simulación es colocar los
componentes en el área de trabajo, como ejemplo vamos a trabajar un circuito
amplificador BJT en la configuración divisor de tensión.
49
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 37. Montaje de amplificador en Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Realizamos un listado de los componentes que se necesitan en el circuito, para el
ejercicio: Resistencias de diversos valores, condensadores, transistor BJT, fuente
DC y fuente AC. Haciendo clic en “Pick Devices” e ingresando en cada una de las
categorías encontramos los dispositivos requeridos como se observa en la
siguiente figura.
Figura 38. Selección de componentes Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
50
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Los resistores se encuentran en la Categoría Resitors, en subcategorias existen
diversas opciones en cuanto al valor nominal, potencia etc. De igual manera en la
Categoria capacitors se tienen los Condensadores, en Transistors están las
diversas clase de transistores como BJT, FET etc, en Simulator primitives
tenemos las fuentes senosoidales como VSINE. Una vez estén los elementos en
la lista de componentes podemos empezar a ubicarlos en el área de trabajo.
Figura 39. Componentes seleccionados para el amplificador en Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Se selecciona el componente y se lleva al área de trabajo, ubicándolo con el
mouse de manera que la interconexión pueda hacerse de manera fácil.
Figura 40. Componentes en el área de trabajo Proteus para amplificador
Fuente: Tomado pantallazo Proteus versión Trial (2009)
51
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Se procede a hacer la conexión de los dispositivos con la herramienta Selection
Mode, o con la herramienta buses mode.
Figura 41. Interconexión del montaje de amplificador en Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Para realizar la simulación y observar los diferentes valores e corrientes y voltajes,
se colocan dispositivos de medida como son voltímetros AC y amperímetros AC.
Estos elementos se encuentran en Virtual Instruments Mode en la parte inferior
izquierda de la barra de herramientas.
Figura 42. Ubicación de instrumentos de medida amplificador Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
52
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Para lograr una visualización del comportamiento de la señal en el tiempo, es
en la salida del circuito, y
necesario adicionar una punta de prueba de voltaje
establecer un área donde se visualice la señal, para ello se usa la herramienta de
modo grafico
, como se muestra a continuación
Figura 43. Ubicación de elementos de visualización Proteus
Área definida para visualizar la señal
Ubicación punta de prueba voltaje
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Para utilizar la punta de prueba se da clic en el icono
, y se elige un punto en el
alambrado de salida donde se pretende visualizar la señal; para ubicar el área de
, y
visualización de la señal, se da clic en la herramienta modo gráfico
posteriormente se da clic en la esquina superior izquierda del área elegida para
ver la señal (dentro del área de trabajo), y se cierra dando clic en la esquina
inferior derecha de dicha área.
Definida el área, es posible visualizar la señal dando clic en el punto de prueba
ubicado y luego con un nuevo clic se arrastra al área de visualización.
53
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 44. Arrastrar punto reprueba al área de visualización Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Para que Proteus realice el trazo de la señal de salida se debe presionar la barra
espaciadora, provocando el cálculo de la salida y su grafica.
Figura 45. Edición del visualizador en Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
54
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Es posible editar el modo grafico, dando clic derecho sobre él y eligiendo la opción
“Edit Properties” y modificar por ejemplo el tiempo de parada “Stop time” digitando
10m (10 milisegundos, esto para una frecuencia de señal de 1 khz, frecuencia de
la señal de entrada, en este caso).
Figura 46. Resultados simulación del amplificador en Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Ejercicios de Aplicación
Aplicando los mismos ejercicios planteados para desarrollar con circuit maker
tenemos:
1. Encontrar las corrientes de malla I1, I2 e I3 del siguiente circuito:
55
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 47. Ejercicio de aplicación Proteus mallas
R1
10
I1
R2
4
+
Vs1
10V
I2
-
R3
8
R4
5
I3
R5
10
Fuente: Juan Monroy (2007)
Primero definimos el sistema de ecuaciones de malla del circuito.
22 ⋅ I 1 − 4 ⋅ I 2 − 8 ⋅ I 3 = 0
− 4 ⋅ I 1 + 9 ⋅ I 2 − 5I 3 = 10
− 8 ⋅ I 1 − 5I 2 + 23 ⋅ I 3 = 0
Para resolver el sistema proseguimos a encontrar el determinante de la matriz A:
22
− 4 −8
Δ = − 4 9 − 5 = 2740
− 8 − 5 23
Una vez que hemos encontrado el determinante de la matriz A hallamos el valor
de cada incógnita del sistema en este caso I1, I2 e I3.
I1 =
0 −4 −8
10 9 − 5
0 − 5 23
Δ
=
1320
= 0.4848 A
2740
56
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA 22 0 − 8
− 4 10 − 5
I2 =
I3 =
−8
0
23
Δ
22 − 4 0
− 4 9 10
−8 −5 0
Δ
=
4420
= 1.61A
2740
=
1420
= 0.51A
2740
Los resultados se comprueban haciendo el siguiente montaje en Proteus
Figura 48. Medidas tomadas con instrumentos Proteus, mallas
Fuente: Tomado pantallazo Proteus versión Trial (2009)
2. En el circuito de la siguiente figura calcular los VCE e IC en DC. En AC medir la
ganancia de voltaje AV
57
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA De igual manera como se simulo en Circuit Maker. En el circuito de la siguiente
figura calcular los VCE e IC en DC. En AC medir la ganancia de voltaje AV
Figura 49. Ejercicio de aplicación Proteus, amplificador
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Tenemos que:
VTH = V1 * 22 KΩ /( 22 KΩ + 82 KΩ) = 3.8V
RTH =
IB =
22 KΩ * 82 KΩ
= 17.34 KΩ
22 KΩ + 82 KΩ
VTH − VBE
= 22 μA
RTH + ( β + 1) * RE
I C = βI B = 2.2 mA
VCE = V1 − I c RC − I C RE = 3.04 V
AV =
RC II RE
=3
RE
58
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Haciendo el siguiente montaje podemos comprobar los resultados, observe los
datos que muestran los indicadores de corriente y voltaje
Figura 50. Medidas tomadas con instrumentos Proteus, amplificador
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Finalmente haciendo la grafica de Analogue Analysis, se puede observar el voltaje
de salida, y calculando la ganancia de voltaje de este circuito como V0/ Vi y que
da como resultado 3.
59
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 51. Resultados de simulación amplificador división de tensión en Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
CAPÍTULO 3: DISEÑO Y SIMULACIÓN DE CIRCUITOS DIGITALES,
CIRCUITOS IMPRESOS
Introducción. En esta parte se aborda el proceso de diseño y simulación de
circuitos electrónicos de tipo digital, al igual que el manejo de los diagramas
esquemáticos para la generación del PCB o circuito impreso, necesario para
conocer la disposición física y forma de conectar los elementos del circuito,
Lección 11. Dispositivos electrónicos e interconexión circuit maker y proteus
Dispositivos Electrónicos. Podemos encontrar componentes de circuitos
digitales como compuertas (GATES), multiplexores (MUX), contadores entre otros.
Los circuitos digitales se encuentran en la mayoría de los sistemas electrónicos
modernos, ya que con el avance en las tecnologías de integración de elementos
en circuitos integrados se puede tener al alcance una gran cantidad de funciones
que van desde: compuertas lógicas (SSI), sumadores binarios (MSI) y unidades de
manejo de datos (LSI) y otros niveles de integración más elevados. Los
componentes electrónicos digitales en Circuit Maker se encuentran en el panel
frontal en las categorías DIGITAL ANIMATED, DIGITAL BASIC, DIGITAL BY
FUNCTION, DIGITAL BY NUMBER, se pueden trabajar tanto en la presentación
60
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA individual o en circuito integrado. En la siguiente tabla se encuentran relacionados
algunos de los elementos digitales que se trabajan en Circuit Maker.
Tabla 3. Componente Digitales Circuit Maker
Indicador animado
Indicador animado
CAR1
S
F
Indicador animado
OC
Reset
NO
C
NC
Display 7
segmentos
Diodo Led
DISP4
Display 7
segmentos
DISP1
WND1
CAR1
S
F
Reset
Display ASCII
7
6
5
4
3
2
1
CP
V+
DISP2
abcdefg.
Lámpara
Display Lógico
Semáforo
L1
L2
SEM1
Compuerta NAND
Compuerta NOR
Compuerta OR
D1
LED1
4321
switch
Compuerta AND
V2
5V
U9A
Compuerta XNOR
Compuerta XOR
U13A
U10A
U11A
Buffer
U14A
U12A
Inversor
U1A
Sumador
U18
74LS83
U3A
A4
A3
A2
A1
B4
B3
B2
B1
s4
s3
s2
s1
Cin
Flip flor tipo D
Flip flor tipo JK
D
CP
Flip flor topo RS
U7A
U4
Q
_
Q
J
CP
K
Q
_
Q
S
Q
_
Q
R
A3
A2
A1
A0
B3
B2
B1
B0
R
Multiplexor
Memoria PROM
Memoria Ram
U3
74LS373
U1
PROM32
U1
PROM32
OE
D7
D6
D5
D4
D3
D2
D1
D0
E
Q7
Q6
Q5
Q4
Q3
Q2
Q1
Q0
CS
A4
A3
A2
A1
A0
CS
O7
O6
O5
O4
O3
O2
O1
O0
A4
A3
A2
A1
A0
Comparador
U1
74LS85
74LS85
U8
O7
O6
O5
O4
O3
O2
O1
O0
IA<B
IA=B
IA>B
A<B
A=B
A>B
Registro
Latch
U3
74LS373
OE
D7
D6
D5
D4
D3
D2
D1
D0
U20
4017
DS
PL
CE
CP
CP1
CP0
Q7N
Q7
E
Q7
Q6
Q5
Q4
Q3
Q2
Q1
Q0
Contador
U1
74LS165
D7
D6
D5
D4
D3
D2
D1
D0
Cout
MR
Q5-9
Q9
Q8
Q7
Q6
Q5
Q4
Q3
Q2
Q1
Q0
Fuente: Construida con imágenes Circuit Maker versión Trial Juan Monroy (2007).
61
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Los elementos una vez seleccionados se colocan en el área de trabajo y se ubican
en una posición favorable para su posterior conexión.
Los componentes electrónicos digitales en Proteus no se encuentra clasificados
de manera específica como en Circuit Maker, se encuentra en diferentes
categorías a las que se puede llegar pulsando el icono de componentes
En la siguiente tabla se encuentran relacionados algunos de los elementos
digitales que se trabajan en Proteus.
Tabla 4. Componentes Digitales Proteus
Indicador animado
Indicador animado
Indicador animado
Display ASCII
Display 7
segmentos
Display 7
segmentos
Diodo Led
Lámpara
Display Lógico
Semáforo
switch
Compuerta AND
Compuerta NAND
Compuerta NOR
Compuerta OR
Buffer
Compuerta XOR
Buffer
Inversor
Sumador
62
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 4. Componentes Digitales Proteus (Continuación)
Flip flor tipo D
Flip flor tipo JK
Flip flor topo RS
Comparador
Latch
Multiplexor
Memoria PROM
Memoria Ram
Registro
Contador
Fuente: Construida con imágenes de Proteus versión Trial Juan Monroy (2009).
Interconexión de Dispositivos. Como ya se había mencionado en las lecciones
anteriores, para realizar la interconexión se utiliza la herramienta alambrar
circuit Maker y la herramienta Bus
en
en Proteus.
Para Circuit Maker se inicia el alambrado haciendo clic sobre este icono y
ubicando el puntero del mouse en una de las terminales del componente, al hacer
esto recuerde que aparecerá un recuadro rojo alrededor de la terminal
seleccionada; enseguida y manteniendo presionado el botón izquierdo del mouse
se arrastra a la terminal del otro componente donde se desea hacer la conexión y
soltándolo al realizar el contacto. Es importante mencionar que si por error se
realiza una interconexión entre dos elementos que originalmente no están
conectados, es posible eliminar dicha conexión haciendo clic sobre ella y
presionando la tecla delete.
Para empezar el alambrado en Proteus, se hace clic sobre este icono y se ubica el
puntero del mouse en una de las terminales del componente, al hacer esto
aparecerá un recuadro rojo alrededor de la terminal seleccionada; a continuación
se hace clic en la terminal, presionado el botón izquierdo del mouse y se desplaza
dirigiéndolo a la terminal del otro componente donde se desea hacer la conexión y
se hace clic en el contacto. Es importante mencionar que si por error se realiza
63
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA una interconexión entre dos elementos que originalmente no están conectados, es
posible eliminar dicha conexión haciendo clic derecho sobre ella y seleccionando
“delete wire” del menú contextual que aparece.
Lección 12. Simulación de circuitos y ejercicios de aplicación circuit maker
A manera de ejemplo haga el montaje del siguiente circuito usando Circuit Maker
Figura 52. Ejemplo para montaje de circuito digital
V1
0V
U1A
U1C
V2
5V
L1
U1B
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Simulación De Circuitos. Antes de realizar la simulación se debe seleccionar
Modo Digital en la barra de menú Simulation/Digital Mode/Run.
De esta manera puede distinguir en el led los estados del la salida del circuito en
función de las señales de entrada.
A Continuación observe el pantallaza que se genera al momento de realizar la
simulación del circuito digital seleccionado.
64
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 53. Resultado de simulación circuito digital Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Ejercicios De Aplicación
1. Realizar un circuito astable con el Integrado LM555, observar la forma de onda
producida y la frecuencia de la misma.
Figura 54. Circuito astable Circuit Maker
+12V
RA
1k
1
2
3
4
Vcc
Dis
Thr
Ctl
8
7
6
5
RB
1k
.IC
+
RL
10k
555
Gnd
Trg
Out
Rst
C1
.01uF
+
R1
2k
CT
.1uF
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
65
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Para observar la forma de onda activamos el modo de simulación Transient
Analysis en Simulation/Analog Mode, y se ejecuta la simulación mediante el
comando Run.
Figura 55. Resultado de simulación circuito astable Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
2. Diseñe un circuito contador digital de 0 a 9, que responda a la señal de un
pulsador como activación del conteo
Figura 56. Circuito Contador Digital Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
66
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Al realizar la simulación del circuito, se observa a través del display siete
segmentos el conteo que se esta llevando a cabo y la forma de control elegida
Figura 57. Resultado de simulación circuito contador digital Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Lección 13. Simulación de circuitos y ejercicios de aplicación proteus
A manera de ejemplo haga el montaje del siguiente circuito usando Circuit Maker
Figura 58. Ejemplo para montaje de circuito digital
V1
0V
U1A
U1C
V2
5V
L1
U1B
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
67
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Simulación De Circuitos. Una vez seleccionados los componentes a utilizar en
el circuito, se colocan en el área de trabajo y se procede a la simulación.
En la siguiente gráfica observe el pantallazo generado para la simulación de un
circuito lógico
Figura 59. Resultado de simulación circuito digital Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Ejercicios de Aplicación
1. Realizar el circuito astable con el Integrado LM555, observar la forma de onda
producida y la frecuencia de la misma.
Realice el siguiente montaje
68
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 60. Circuito astable Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Para observar la forma de onda colocamos una punta de prueba y seleccionamos
el espacio donde se desea mostrar la señal, se ejecuta la simulación con el botón
Play y se visualiza la grafica haciendo clic en la barra espaciadora.
Figura 61. Resultado de simulación circuito astable Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
69
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA 2. Diseñe un circuito contador digital de 0 a 9, que responda a la señal de un
pulsador como activación del conteo
Figura 62. Circuito contador digital Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Se seleccionan las componentes necesarias en el circuito y se llevan al área de
trabajo. El tren de pulsos lo encuentra en la categoría “Generators” en la opción
DPATTERN, y la frecuencia de los pulsos los ajusta editando las propiedades del
dispositivo.
Figura 63. Resultado de simulación circuito contador digital Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
70
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 14. Diagrama esquemático de Circuitos impresos, importar y
generar pcb circuit maker
Diagrama Esquemático. La realización de un circuito impreso requiere que
previamente se halla hecho el diagrama esquemático. Como se ha visto
anteriormente el diagrama esquemático se realiza en Circuit maker colocando los
componentes en el área de trabajo, se debe tener cuidado con las conexiones al
exterior de la placa tales como entradas de señal, conexiones de fuentes de
alimentación, micrófonos, salidas a parlantes etc. Estas conexiones se colocan en
el diagrama esquemático seleccionando en el panel frontal en la categoría
CONNECTORS, en donde se encuentran diversos tipos de conectores como:
Figura 64. Conectores Circuit Maker
J3
J6
J2
J4
ent 1
P1
J5
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Un ejemplo de estas conexiones se muestra en el siguiente diagrama
esquemático, donde se reemplazo la fuente de alimentación por un conector de
dos entradas al cual se le asignaron nombres a los pines (Vcc y GND), y la señal
de entrada al circuito como otro conector donde será conectada posteriormente la
señal a ser amplificada.
71
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 65. Diagrama esquemático para generar PCB Circuit Maker
R1
1k
R3
1k
C1
1uF
J2
Q1
NPN
J1
R4
1k
Vcc
GND
R2
1k
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Importar Circuitos y Generación del PCB. Una vez se tenga el diagrama
esquemático se procede a exportar el circuito a un programa de elaboración de
PCB, Circuit Maker trae la conexión directa a estos programas a través del
. Pulsando este icono aparece la ventana de exportación
siguiente icono
para crear el PCB, en la pestaña se puede seleccionar el programa mediante el
cual se desea crear el impreso, aparecen Traxmaker que es el programa asociado
por defecto a Circuit Maker y otros como Protel, Tango y Orcad entre otros.
Figura 66. Ventana para exportación PCB
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
72
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tomamos el programa por defecto TraxMaker y activamos todas las opciones que
aparecen en la parte izquierda de la ventana. En la parte derecha tenemos la
oportunidad de seleccionar el tamaño de la placa en largo y ancho (este valor esta
dado en mils: milésimas de pulgada), presionamos OK y aparece una ventana de
salvar PCB, se da un nombre al archivo y se guarda.
Una vez se ha exportado el circuito, automáticamente se abre el programa
traxmaker y aparece el grafico de la placa impresa con los componentes y una
ventana de información del proceso, damos OK en esta ventana y nos da un
informe de errores so lo solicitamos, en caso contrario desaparece la ventana y
nos permite observar solamente la placa de circuito impreso. Si esta aparece muy
pequeña la ampliamos con la herramienta zoom.
Figura 67. Ventana de Información del PCB generado Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Como se observa en la siguiente figura los componentes aparecen organizados
automáticamente. El enrutado de las pistas se puede realizar manual o
automáticamente, seleccionando la opción en la barra de menú ROUTE.
73
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 68. PCB generado Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Si se elige la opción manual se debe realizar cada una de las conexiones entre los
componentes, si se escoge la opción board el trazado se realiza automáticamente
y aparece una ventana para salvar el trabajo realizado hasta el momento damos
OK y el trazado de las pistas aparece automáticamente.
Figura 69. Ventana Salvar PCB Circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
74
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 70. Trazado de las pistas PCB circuit Maker
Fuente: Tomado pantallazo Circuit Maker versión Trial (2007)
Se puede guardar el archivo del pcb, con la opción save en la subdivisión de la
opción File de la barra de menú.
Lección 15. Diagrama esquemático de Circuitos impresos, importar y
generar PCB proteus
Diagrama Esquemático. Al igual que en Circuit maker para la realización de un
circuito impreso es necesario que previamente se haya hecho el diagrama
esquemático. Como se dijo anteriormente es necesario tener cuidado con las
conexiones al exterior de la placa, tales como: entradas de señal, conexiones de
fuentes de alimentación, micrófonos, salidas a parlantes etc. Estas conexiones se
colocan en el diagrama esquemático seleccionando de la lista de componentes los
CONNECTORS, en donde se encuentran diversos tipos de conectores como:
75
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 71. Conectores PCB
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Un ejemplo de estas conexiones se muestra en el siguiente diagrama
esquemático, donde se reemplazo la fuente de alimentación DC por un conector
de dos entradas, la señal de entrada AC y la tierra del circuito como otro conector
de dos entradas, donde será conectada posteriormente la señal a ser amplificada
y finalmente otro conector de dos entradas para la salida amplificada del cto.
Figura 72. Diagrama esquemático para generar PCB Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
76
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Importar Circuitos y Generar el PCB
Una vez se tenga el diagrama esquemático se abre procede a exportar el circuito
a un programa de elaboración de PCB, primero se genera un listado de la red del
circuito diseñado, para eso se selecciona la opción Tools/Netlist Compiler, aparece
una ventana donde permite modificar algunos parámetros para al generación del
listado.
Figura 73. Ventana de configuración del listado de elementos en la red del PCB
Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Se hace clic en OK y parece una ventana con la lista de red así:
77
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 74. Lista de red para PCB Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Seleccionamos Close.
Para ingresar a la herramienta que maneja el PCB, damos clic en el icono del
botón Ares
, se abre la ventana para la generación del PCB, en ella
Figura 75. Ventana ARES-Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
78
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA En esta ventana de Ares, es necesario definir el área de la placa que contendrá
los elementos del circuito electrónico, entonces, primero se define como capa de
trabajo Board Edge,
Figura 76. Área para definir la capa de trabajo PCB Ares-Proteus.
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Luego, se hace clic en el icono 2D Graphics Box
y dentro del área de trabajo se
marca un rectángulo (clic esquina superior izquierda, arrastrar el Mouse y clic en la
esquina inferior derecha) que indica el tamaño de la placa que contendrá los
componentes.
Figura 77. Definición del área para el PCB Ares-Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Se da clic en botón de AUTO-PLACER
y automáticamente adiciona los
componente en su formato PCB mostrando una las conexiones entre los
elementos así:
79
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 78. Elementos y conexiones del PCB recién generado Ares-Proteus.
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Posteriormente se da clic en el botón de AUTOROUTER
pistas así:
y Ares genera las
Figura 79. Pistas generadas para el PCB Ares-Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
Antes de utilizar estas herramientas es necesario caracterizar el grosor de las
pistas y el lado de la placa en el que van a aparecer. Estas características se
modifican en la opción Set Strategies del menú System
80
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 80. Ventana para configurar las características del PCB Ares-Proteus
Fuente: Tomado pantallazo Proteus versión Trial (2009)
De estas opciones es necesario definirlas de acuerdo al tipo de circuito a
implementar, por ejemplo, si el alambrado maneja señales considerables de
corriente (circuitos de potencia), se debe utilizar la opción Power del grupo Tactics.
81
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA ACTIVIDAD DE UNIDAD 1
Se plante el siguiente problema para que a través de él se haga un ejercicio de
autoevaluación para poder identificar aquella temática en la cual se debe reforzar
el trabaja o hacer mayor profundización y consulta
Realice el diseño y montaje de un amplificador clase C, de forma tal que se logre
sintonizar una frecuencia de 2,56 Mhz y verifique que:
a. Sintonice solo esa frecuencia
b. Verifique el factor de calidad
c. Duplique el valor de la capacitancia y mantenga el valor de la inductancia,
observe la frecuencia de resonancia
d. Duplique el valor de la inductancia y mantenga el valor inicial de la
capacitancia, observe la frecuencia de resonancia
e. De los dos ejercicios anteriores concluya
82
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA FUENTES DOCUMENTALES UNIDAD 1
BIBLIOGRAFIA
Circuitos
Johnson D. (1996). Análisis básico de circuitos eléctricos
Prentice Hall.
(5ta. Ed). Mexico:
Richard Dorf. (1997). Circuitos eléctricos Introducción al análisis y diseño (2da.
Ed). Colombia: Alfaomega.
Richard Dorf (2000). Circuitos eléctricos introducción al análisis y diseño (3ra Ed.).
Mexico: Alfaomega.
Comunicaciones
Andrew Hopper. (1989). Diseño de redes locales. USA: Addison-Wesley.
Carlson (1997). Sistema de comunicación.
Colombia: McGraw Hill.
Stremler (1993). Introducción a los sistemas de comunicación. USA: Addison
Wesley.
Tanenbaum. (1997). Redes de computadoras (3ra Ed). Mexico: Prentice Hall.
Tomasi: (1996). Sistemas de comunicaciones electrónicas (2da Ed). Mexico:
Prentice.
Electrónica Análoga
Horestein. (1997). Microelectrónica, circuitos y dispositivos (2da Ed). Mexico:
Prentice Hall.
Malvino. (1999). Principios de electrónica (6ta Ed). España: McGraw Hill.
Millman and Grabel. (1988). Microelectronics. USA: Mc. Graw Hill.
Robert Boylestad. (1997). Electrónica Teoría de circuitos. Mexico: Prentice Hall.
83
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Electrónica Digital
Floyd. (1993). Fundamentos de sistemas digitales (6ta Ed). España: Prentice Hall.
Mano. (1987). Diseño Digital. Mexico: Prentice Hall.
Malvino. (1993). Principios y aplicaciones digitales. España: Marcombo.
Tocci. (1993). Sistemas digitales, Principios y aplicaciones (5ta Ed). Mexico:
Prentice Hall.
Microprocesadores y Microcontroladores
Barry Brey. (1994). Los microprocesadores Intel avanzados. Mexico: Noriega.
Herbert Tabú. (1983). Circuitos digitales y microprocesadores. España: McGraw
Hill.
José Adolfo González Vásquez.(1994). Introducción a los microcontroladores de
16 Bits. España: McGraw Hill.
Peter Abel. (1996). Lenguaje ensamblador y programación para PC IBM y
compatibles. Mexico: Pearson.
Simulación
Hilario Pérez. (2000). Simulación y electrónica analógica. Prácticas y problemas.
Colombia: Alfaomega.
Raczynski (1993). Simulación por Computadoras. Mexico: Noriega.
Ross. (1999). Simulación (2da Ed). Mexico: Prentice Hall.
Stanley Wolf. (1980). Guía para mediciones electrónicas y practicas de laboratorio.
Mexico: Prentice Hall.
Simulación, Un enfoque practico. Coss. Limusa. 1992. Mexico
84
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA SITIOS WEB
Circuitos
Francisco Jose Molina Lopez. (2004). Electrónica Fácil. (2004). [en línea].
Recuperado el 19 de julio de 2009, de http://www.electronicafacil.net/circuitos/
Universidad de Santiago de Chile, Departamento de Física. [en línea].
Recuperado el 19 de julio de 2009, de
http://fisica.usach.cl/~iolivare/guia11_bateriasycircuitosdc.pdf
Simbología Electrónica. (1998). [en línea]. Recuperado el 19 de julio de 2009, de
http://www.simbologia-electronica.com/
Microprocesadores microcontroladores
The EE compendion. (2009). [en línea]. Recuperado el 19 de Julio de 2009, de
http://ee.cleversoul.com/
Arquitectura RISC, Vs Cisc. (). [en línea]. Recuperado El 19 de Julio de 2009, de
http://www.azc.uam.mx/publicaciones/enlinea2/num1/1-2.htm
Microprocesadores. [en Línea]. Recuperado el 19 de julio de 2009, de
http://www.duiops.net/hardware/micros/micros.htm
Microcontroladores. (). [en Línea]. Recuperado El 19d e julio de 2009, de
http://www.geocities.com/TheTropics/2174/micro.html
Electrónica
Advances in electronics. (2000). [en línea]. Recuperado el 19 de julio de 2009, de
http://www.electronica2000.250x.com/
Sección de Electrónica. [en Línea]. Recuperado el 19 de julio de 2009, de
http://www.pablin.com.ar/electron/
Francisco Jose Molina Lopez. (2004). Electrónica Fácil. (2004). [en línea].
Recuperado el 19 de julio de 2009, de http://www.electronicafacil.net/
Circuitos Electrónicos Curiosos. [en Línea]. Recuperado el 19d e julio de 2009, de
http://perso.wanadoo.es/v.dominguez/
85
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Circuitos Electrónicos útiles (2000). [en Línea]. Recuperado el 19 de julio de 2009,
de http://www.creatronica.com.ar/circuitos.htm
Circuitos Electrónicos formato PDF. (2000). [en Línea]. Recuperado El 19 de Julio
de 2009, de http://www.electronica2000.com/pdf/circuitospdf.htm
Circuitos Digitales. (1997). [en Línea]. Recuperado El 19 de Julio de 2009, de
http://www.monografias.com/trabajos14/circuidigital/circuidigital.shtml
Sistemas operativos
Conceptos de Sistemas Operativos. [en Línea]. Recuperado el 19 de julio de 2009,
de http://iie.fing.edu.uy/~vagonbar/unixbas/sisop.htm
¿Qué es un sistema operativo? (2009). [en Línea]. Recuperado el 19 de julio de
2009, de http://www.masadelante.com/faqs/sistema-operativo
Descripción del sistema operativo (2009). [en Linea]. Recuperado el 19 de julio de
2009, de http://es.kioskea.net/contents/systemes/sysintro.php3
Descargas
Scilab 5.1.1. (2009). [en Línea]. Recuperado el 19 de julio de 2009 de,
http://scilab.softonic.com/
TheMathWorks. (2009). [en Línea]. Recuperado el 19 de julio de 2009, de
http://www.mathworks.com/products/matlab/
Aprenda matlab 7.0. (2005). [en Línea] . Recuperado el 19 de julio de 2009, de
http://mat21.etsii.upm.es/ayudainf/aprendainf/Matlab70/matlab70primero.pdf
Proteus. (2009). [en Línea]. Recuperado el 19 de julio de 2009, de
http://www.ieeproteus.com/descarga.html
Altium Designer. (2009). [en Línea]. Recuperado el 19 de Julio de 2009, de
http://www.altium.com/index.cfm?03CC4A65-7E95-D748-0AD7-16EDFB1812AE
86
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA UNIDAD 2: MODELAMIENTO MATEMÁTICO Y FUNDAMENTOS DE
PROGRAMACIÓN
INTRODUCCIÓN
Con el modelamiento matemático se inicia la segunda unidad, importante para el
estudio de casos factibles de representarse a partir de funciones y/o ecuaciones
matemáticas, para ello se deben manejar los conceptos de algebra lineal y cálculo
diferencial En la siguiente parte de la segunda unidad se centra la atención en el
manejo de los principios de la programación como herramienta para el desarrollo
de software en lenguajes de programación de alto nivel y de bajo nivel, conceptos
fundamentales en un Ingeniero Electrónico.
JUSTIFICACION
La representación del mundo real a través de un modelo matemático es una
herramienta fundamental en la ingeniería, ya que a partir de estos modelos se
pueden hacer estudios de comportamiento de los sistemas y de alguna manera
llegar a predecir los efectos o respuestas de estos ante determinados estímulos,
de ahí la necesidad de conocer aplicativos que permitan manejar esos modelos
matemáticos.
La programación de elementos microprocesados o microcontrolados cada vez
cobra mayor importancia, derivada de la necesidad de ejercer un control sobre un
sistema o procesos a través de código y circuitos, razón por la cual es necesario
manejar los conceptos que fundamentan la programación y a través de un
aplicativo hacer visible los algoritmos de control.
87
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA INTENCIONALIDADES FORMATIVAS
Propósitos
•
Desarrollar soluciones que den respuestas a problemas que involucren
programación de microprocesados y microcontrolados y de la interacción
entre un circuito externo y el computador.
Objetivos
•
Desarrollar en el estudiante la habilidad de diseñar e implementar
soluciones a problemas que involucren el uso de la microprogramación y el
modelamiento matemático.
Competencias
•
•
El estudiante maneja el modelamiento matemático en la solución de
problemas que así lo requieran.
El estudiante elabora una solución completa a problemas que requieran
manejo de programación a bajo nivel.
Metas de aprendizaje
Al final del curso el estudiante:
•
Aplicará herramientas de modelamiento matemático en la solución de
problemas determinados
Denominación de Capítulos
Capítulo 1. Tratamiento Matemático
Capítulo 2. Operaciones con arreglos
Capítulo 3. Fundamentos de Programación
88
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA CAPÍTULO 1: TRATAMIENTO MATEMÁTICO
Introducción. En este capítulo se muestra la forma como a través de un aplicativo
se puede resolver algunas de las operaciones matemáticas frecuentes al diseñar
circuitos o hacer modelamiento de sistemas
Lección 1. Polinomios y operaciones.
El modelamiento matemático es parte fundamental dentro de la ingeniería, ya que
los problemas que se intentan resolver son diversos, algunos muy complejos y
particulares, con este modelamiento se busca encontrar una representación
matemática de una situación para hallar su solución, en la mayoría de los casos
los modelos planteados no se pueden resolver por métodos analíticos, o a su vez
la resolución de estos es rutinaria y fácilmente se puede recurrir a herramientas
computacionales que realicen esta tarea. El proceso que se lleva a cabo al
representar matemáticamente un problema de ingeniería, involucra tareas como
las de discretizar el problema, es decir, en vez de usar una ecuación que describa
el comportamiento a través de todo el tiempo, se formulan muchas ecuaciones
(algebraicas) que describen el comportamiento en un punto en particular o para un
instante en particular del tiempo. Luego todas estas ecuaciones, se ingresan a un
software que resuelve y entrega las soluciones de estas ecuaciones; estas
soluciones deben ser válidas por datos esperados por los ingenieros, si
concuerdan, se garantiza entonces que el modelo es una buena representación
de la situación, si por el contrario no son los resultados esperados, se debe
revalidar el modelo, ajustarlo e iniciar el proceso nuevamente.
Dentro del software con mayor acogida en ingeniería está el MATLAB que es un
entorno de computación y desarrollo de aplicaciones para llevar a cabo proyectos
en donde se encuentren implicados elevados cálculos matemáticos y la
visualización gráfica de los mismos. MATLAB integra análisis numérico, cálculo
matricial, proceso de señal y visualización gráfica y un lenguaje de programación
de alto nivel.
Aunque existen otros programas de calculo, los ejemplos tratados en este capitulo
se desarrollan en MATLAB versión estudiantil debido a su gran versatilidad y
amplia difusión.
89
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Antes de entrar en el manejo que le da Matlab a la solución de las ecuaciones,
miremos el siguiente párrafo que muestra la importancia del modelamiento
matemático dentro de la industria:
El matemático Carlos Conca fue precursor en acercar el modelamiento
matemático a la industria. A comienzos de la década del ’80, mientras hacía su
Doctorado de Estado en Matemáticas, en la Universidad Pierre et Marie Curie,
Paris VI, fue requerido por un equipo de ingenieros de la empresa “Electricité de
France” (EDF) para que investigara un problema de resonancia, que presentaba el
haz de tubos de los condensadores e intercambiadores de calor en las centrales
nucleares francesas. Carlos Conca recuerda que por aquel entonces no era bien
visto que un matemático se ocupara de problemas de origen industrial. Sin
embargo, a raíz de esta solicitud, se originó un debate en el departamento de
matemáticas donde se desempeñaba, que terminó con una solución salomónica:
se creó en forma independiente una pequeña unidad de matemáticas aplicadas al
interior de su departamento.
Regresa a Chile en 1987, con el interés de plasmar este tipo de experiencias en el
país, e intentar vincular la matemática más fundamental con las aplicaciones
industriales. Se asocia a otros ingenieros del Departamento de Ingeniería
Matemática de la Universidad de Chile, y en Abril del 2000, fundan el Centro de
Modelamiento Matemático (CMM). Desde aquí, se propone la tarea de consolidar
una capacidad mecánico matemática de primer nivel, capaz de afrontar los
problemas de la metalurgia del cobre chileno a nivel competitivo mundial.
http://www.bioplanet.net/magazine/bio_mayjun_2004/bio_2004_mayjun_cmm.htm
Polinomios. Con un polinomio a=
m −1
s n + s n −1 + s n−2 + ...s + 1 = 0 y un polinomio
m−2
+s
+ ...s + 1 = 0 pueden realizarse las operaciones básicas
b= s + s
tales como suma, resta, multiplicación, división etc.
m
En el entorno de Matlab se introducen los polinomios expresados como vectores,
es decir incluyendo solamente los coeficientes del polinomio. Por ejemplo el
polinomio
p(s) = s 2 + 2s + 4
Se introduce en Matlab como
p= [1 2 4]
90
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Donde las componentes del vector p corresponden a los coeficientes del
polinomio, dichas componentes deben ir separadas por espacios o por comas.
En la siguiente a se muestra el entorno de trabajo de Matlab, allí se puede por
ejemplo, ingresar el polinomio anterior.
Figura 81. Entorno de trabajo Matlab
Fuente: Tomado pantallazo Matlab versión Trial (2007)
Operaciones. Matlab permite realizar la suma, resta, multiplicación, división y
evaluación de polinomios con los siguientes comandos. Las operaciones como
suma y resta se trabajan directamente como p1+p2 o p1-p2, habiendo definido
previamente los polinomios. Otras funciones útiles en la manipulación de
polinomios son:
•
•
•
•
•
•
•
•
poly
Inicia un polinomio. Si el argumento es una matriz cuadrada devuelve
el polinomio característico, si es un vector devuelve un polinomio cuyas raíces
son los elementos del vector.
roots
Devuelve las raíces del polinomio cuyos coeficientes son los
elementos del vector argumento.
polyval Calcula el valor del polinomio en el punto dado
polyder Deriva un polinomio.
polyint Integra analíticamente un polinomio.
conv
Multiplica dos polinomios.
deconv Divide dos polinomios
Roots
Encuentra las raíces de un polinomio
91
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Por ejemplo dado los polinomios
p1 = 2s 3 + 4s 2 + s + 6
p 2 = 3s 2 + 4 s + 1
Se pueden realizar las operaciones básicas como
p1 + p 2 = 2 s 3 + 7 s 2 + 5s + 7
p1 − p 2 = 2s 3 + s 2 − 3s + 5
p1* p 2 = 6s 5 + 20s 4 + 21s 3 + 26 s 2 + 25s + 6
p1 / p 2 = 0.666 s + 0.44
En matlab se realizan como se observa en la siguiente figura
Figura 82. Operaciones en Matlab
Fuente: Tomado pantallazo Matlab versión Trial (2007)
92
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 2. Derivadas e integrales definidas y no definidas
Derivadas
Para determinar la derivada simbólica de una expresión simbólica se usa la
función diff, la cual tiene cuatro variantes:
Tabla 5. Variantes de la función diff
Variante
diff(f)
diff(f,n)
diff(f,'t')
diff(f,'t',n)
Descripción
Derivada ordinaria: Devuelve la derivada de la
expresión f respecto de la variable independiente
por omisión.
Derivada de orden superior n: Devuelve la n-ésima
derivada de la expresión f respecto de la variable
independiente por omisión.
Derivada parcial ordinaria: Devuelve la derivada de
la expresión f respecto a la variable t.
Derivada parcial de orden superior n: Devuelve la nésima derivada de la expresión f respecto a la
variable t.
Fuente: Juan Monroy (2009)
Para realizar la derivada en Matlab se debe definir la variable como una variable
simbólica esto se realiza con el comando syms o a través de apóstrofos, por
ejemplo:
>> syms x, y;
>> y='x^2';
Una vez definida la variable se puede utilizar alguno de los comandos
mencionados anteriormente. A continuación se muestran algunos ejemplos
93
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 6. Ejemplos de derivadas en Matlab
Operación
(
1.
d
8 x 4 − 3x 2 + 6 x − 2
dx
2.
d
cos x
dx
3.
d 2 x
(x e )
dx
Instrucción en Matlab
)
>> syms x;
>> f=8*x^4-3*x^2+6*x-5;
>> diff(f)
ans =
32*x^3-6*x+6
>> syms x;
>> f=cos(x);
>> diff(f)
ans =
-sin(x)
» syms x;
» f=x^2*exp(x);
» diff(f)
ans =
2*x*exp(x)+x^2*exp(x)
Derivadas de orden superior
d2
4.
8x 4 − 3x 2 + 6 x − 2
>> syms x;
dx 2
>> f= f=8*x^4-3*x^2+6*x-5;
>> diff(f,2)
ans =
96*x^2-6
(
)
Fuente: Juan Monroy (2009)
Integrales definidas y no definidas.
Para integrar una función simbólica f en MATLAB se utiliza la función int, la cual
busca una expresión simbólica F tal que diff(F)=f. Sin embargo, es posible que
dicha integral no exista o que MATLAB no pueda encontrarla, en este caso
devuelve la expresión sin evaluarla. La función int tiene cinco variantes
94
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 7. Variantes de la función int
Variante
Descripción
Devuelve la integral de la expresión f respecto a la
variable independiente por omisión.
Devuelve la integral de la expresión f respecto a la
variable t.
Devuelve la integral de la expresión f respecto a la
variable independiente por omisión evaluada en el
intervalo [a,b], donde a y b son expresiones
numéricas.
Devuelve la integral de la expresión f respecto a la
variable t evaluada en el intervalo [a,b], donde a y b
son expresiones numéricas.
Devuelve la integral de la expresión f respecto a la
variable independiente por omisión evaluada en el
intervalo [m,n], donde m y n son expresiones
simbólicas.
int(f)
int(f,'t')
int(f,a,b)
int(f,'t',a,b)
int(f,'m','n')
Fuente: Juan Monroy (2009)
Al igual que con las derivadas, para realizar el proceso de integración se debe
definir la variable como simbólica, y se procede a utilizar el comando int. A
continuación se presentan algunos ejemplos:
Tabla 8. Ejemplos de integrales en Matlab
Operación
1.
∫ (x
2.
∫ ( xe
2
)
+ 2 x + 1 dx
2x
)dx
Instrucción en Matlab
Integral indefinida
» syms x;
» f=x^2+2*x+1;
» int(f)
ans =
1/3*x^3+x^2+x
» syms x;
» f=x*exp(2*x);
» int(f)
ans =
1/2*x*exp(2*x)-1/4*exp(2*x)
95
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 8. Ejemplos de integrales en Matlab (Continuación)
Operación
π
3.
∫ sen x dx
0
α
4.
∫
−α
1
dx
1+ x2
b
5.
∫
a
3x + 1 dx
Instrucción en Matlab
Integral definida
» syms x;
» f=sin(x);
» int(f,0,pi)
ans =
2
» syms x;
» f=1/(1+x^2);
» int(f,-inf,inf)
ans =
Pi
» syms x;
» f=sqrt(3*x+1);
» int(f,'a','b')
ans =
2/9*(3*b+1)^(3/2)-2/9*(3*a+1)^(3/2)
Fuente: Juan Monroy (2009)
Lección 3. Señales continuas, discretas y funciones de transferencia
Señales Continuas y Discretas. Las señales son funciones del tiempo que
representan la evolución de una determinada variable, como puede ser el voltaje
en los extremos de un condensador, la temperatura de un horno, o la actividad
eléctrica del corazón. Se clasifican en señales continuas y discretas. Si deseamos
graficar una señal continua, por ejemplo una onda senoidal con una frecuencia f=5
hertz (un periodo T=1/5=0.2 s), se debe definir:
•
•
Un vector t, que contenga el rango de valores dentro del cual se va a
graficar la función, vector tiempo.
La sintaxis de este vector es t=valor inicial:incremento:valor final;
Para este caso el valor inicial es 0 s;
El valor final se puede elegir de forma tal que permita mostrar los
ciclos de la señal según la frecuencia, por lo que se selecciona de 1s.
El incremento se sugiere que sea 1/100 del valor final.
t=0:0.01:1;
Otro vector con los valores de la función, A seno (2π f t); A=amplitud =1
f=5;
y=1*sin (2*pi*f*t);
96
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA •
Emplear el comando para graficarla
plot(t,y);
Figura 83. Ejemplo de la gráfica de una señal continua en Matlab
Fuente: Tomado pantallazo Matlab versión Trial (2009)
Para graficar una señal senoidal discreta, en lugar de definir el vector t, se define
un vector del número de muestras que se desea graficar. La señal senosoidal
discreta se define como A seno (2*pi*F*n) (F=frecuencia de la señal discreta que
es la relación entre la frecuencia de la señal que se va a muestrear, 5 Hz y la
frecuencia de muestreo, por ejemplo 100 Hz), y se utiliza el comando stem para
realizar la grafica.
n=0:100; % número de muestra
F= 5/100;
y=1*sin(2*pi*F*n); % A=1
stem(n,y);
Figura 84. Ejemplo de la gráfica de una señal en tiempo discreto en Matlab
Fuente: Tomado pantallazo Matlab versión Trial (2009)
97
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Funciones de Transferencia. La función de transferencia es la relación entre la
señal de salida y la señal de entrada a un sistema. En tiempo continuo esta
relación se da en Transformada de Laplace, es decir en términos de la variable s,
y en tiempo discreto se da en Transformada Z, en términos de la variable z.
Por ejemplo:
G ( s) =
Y ( s)
1
= 2
X ( s) s + 6s + 2
Función de transferencia de un sistema continuo
G( z) =
Y ( z)
z
= 2
X ( z) z + 6z + 2
Función de transferencia de un sistema discreto
Lección 4. Respuesta temporal
Para obtener la respuesta de un sistema en el tiempo ante una entrada estándar,
debe primero definirse el sistema. Para ello puede establecerse en MatLab la
función de transferencia propia del sistema o las ecuaciones de estado. La función
de transferencia de un sistema es una relación formada por un numerador y un
denominador. El numerador Num(s) y el denominador Den(s) deben determinarse
como vectores, cuyos elementos son los coeficientes de los polinomios del
numerador y del denominador en potencias decrecientes de s. Por ejemplo, para
definir la función de transferencia:
G ( s) =
1
s + 3s + 4
2
En matlab
>>num=[1];
>>den=[1 3 4];
Para determinar la respuesta en el tiempo para una entrada escalón unitario de
este sistema se usa el comando step indicando el vector del numerador y del
denominador entre paréntesis. step(num,den)
98
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA >>step(num,den)
MatLab presenta la respuesta en el tiempo en la ventana de figuras:
Figura 85. Respuesta ante una entrada escalón unitario, , para un sistema de
tiempo continuo
Fuente: Tomado pantallazo Matlab versión Trial (2007)
Puede definirse el tiempo en el cual se desea la respuesta al escalón, mediante un
vector de tiempo t, step(num,den,t)
>>t=0:0.1:20;
>>step(num,den,t)
Se define t como un vector cuyo elemento inicial es 0, su elemento final es 20 y
existen elementos que son el incremento desde 0 hasta 20 de 0.1 en 0.1. Al
ejecutar el comando step se obtiene en la ventana de figuras la respuesta escalón
para los primeros 20 segundos.
99
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 86. Respuesta ante una entrada escalón unitario modificando t,
Fuente: Tomado pantallazo Matlab versión Trial (2007)
Para obtener la respuesta en el tiempo para una entrada impulso unitario se usa el
comando impulse. Si se define el sistema en MatLab por los polinomios del
numerador y denominador de la función de transferencia tenemos:
» num=[1 ];
» den=[1 3 4];
» impulse(num,den)
MatLab presenta la respuesta en el tiempo en la ventana de figuras:
Figura 87. Respuesta ante una entrada impulso unitario, para un sistema de
tiempo continuo
Fuente: Tomado pantallazo Matlab versión Trial (2007)
100
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Para los sistemas de tiempo discreto Matlab permite calcular la respuesta
temporal ante diferentes señales de entrada
Debe definirse el numerador Num(z) y el denominador Den(z) como vectores,
cuyos elementos son los coeficientes de los polinomios del numerador y del
denominador en potencias decrecientes de z. Por ejemplo, para definir la función
de transferencia:
G( z) =
0.5 z + 0.3
z − 1.5 z + 0.8
2
En matlab
>>num=[0.5 0.3];
>>den=[1 -1.5 0.8];
Para determinar la respuesta en el tiempo para una entrada escalón unitario de
este sistema se usa el comando filter(num,den, u) indicando el vector del
numerador y del denominador y la señal escalón definida como u(k) entre
paréntesis.
» num=[0.5 0.3];
» den=[1 -1.5 0.8];
» u= ones(1,41);
» y=filter(num,den,u);
» plot(y,'o')
El comando filter hace un calculo numérico, pero no realiza la grafica
directamente, por lo cual hay que utilizar el comando plot para obtener un
resultado grafico.
MatLab presenta la respuesta en el tiempo en la ventana de figuras:
101
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 88. Respuesta ante una entrada escalón unitario, para un sistema de
tiempo discreto.
Fuente: Tomado pantallazo Matlab versión Trial (2007)
Para determinar la respuesta en el tiempo para una entrada impulso unitario se
usa el comando filter(num,den, u) indicando el vector del numerador y del
denominador y la señal impulso definida como u(k) entre paréntesis.
» num=[0.5 0.3];
» den=[1 -1.5 0.8];
» u= [1 zeros(1,40)];
» y=filter(num,den,u);
» plot(y,'o')
Y se obtiene en la ventana de figuras
Figura 89. Respuesta ante una entrada impulso unitario, para un sistema de
tiempo discreto.
Fuente: Tomado pantallazo Matlab versión Trial (2007)
102
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 5. Respuesta en términos de la frecuencia.
Para el estudio de un sistema en el dominio de la frecuencia existen tres
herramientas disponibles en MatLab que son: los diagramas de Bode, de Nyquist y
de Nichols.
Para obtener el diagrama de Bode de una función de transferencia, se definen dos
vectores cuyos elementos son los coeficientes de los polinomios del numerador y
del denominador en potencias decrecientes de s. Estos vectores son usados en el
comando bode con la siguiente sintaxis: bode(num,den).
Por ejemplo, se define la función de transferencia:
G ( s) =
1
s + 3s + 4
2
En Matlab
>>num=[1];
>>den=[1 3 4];
>>bode(num,den)
En el diagrama de figuras se observa el diagrama de Bode
Figura 90. Diagrama de Bode
Fuente: Tomado pantallazo Matlab versión Trial (2007)
103
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Para especificar un rango deseado de frecuencias en las cuales se desea obtener
el diagrama de Bode, se emplea un vector de frecuencias en el que se especifica
la frecuencia inicial, el incremento y la frecuencia final. Por ejemplo:
>>W=0:0.1:100;
>>bode(num,den,W)
Este comando muestra el diagrama de Bode entre 0 y 100 rad/s.
Figura 91. Diagrama de Bode modificando el rango de frecuencias
Fuente: Tomado pantallazo Matlab versión Trial (2007)
Otra herramienta de análisis en el dominio en la frecuencia que ofrece MatLab es
el diagrama de Nichols. Para obtener el diagrama de Nichols se utiliza el comando
nichols, cuya sintaxis es igual a la del comando bode.
Si se define num como el vector de los coeficientes del polinomio del numerador y
den como el del denominador:
>>num=[1];
>>den=[1 3 4];
>>nichols(num,den)
104
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA MatLab presenta en la ventana de figuras el diagrama de Nichols:
Figura 92. Diagrama de Nichols.
Fuente: Tomado pantallazo Matlab versión Trial (2007)
Otra herramienta de análisis en el dominio en la frecuencia que ofrece MatLab es
el diagrama de Nyquist. Para obtenerlo se utiliza el comando nyquist, con sintaxis
igual a la de los dos comandos anteriores
>>num=[1];
>>den=[1 6 5];
>>nyquist(num,den)
MatLab presenta en la ventana de figuras el diagrama de Nyquist:
105
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 93. Diagrama de Nyquist
Fuente: Tomado pantallazo Matlab versión Trial (2007)
Para obtener el margen de ganancia, el margen de fase, la frecuencia de cruce de
ganancia y la frecuencia de cruce de fase MatLab dispone del comando margin.
Margin (num,den) devuelve el diagrama de Bode con el calculo de margen de fase
y margen de ganancia. Por ejemplo
» num=[1];
» den=[1 0.5 2];
» margin(num,den)
Figura 94. Resultado de usar el comando Margin
Fuente: Tomado pantallazo Matlab versión Trial (2007)
106
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA El comando [Gm,Pm,Wcg,Wcp] = margin(num,den) devuelve los valores
numericos de margen de fase, margen de ganancia y las frecuencias en las cuales
se dan estos cruces. Por ejemplo
» num=[1];
» den=[1 0.5 2];
» [Gm,Pm,Wcg,Wcp]=margin(num,den)
Gm =
Inf
Pm =
53.6248
Wcg =
NaN
Wcp =
1.6103
CAPÍTULO 2: OPERACIONES CON ARREGLOS
Lección 6. Arreglos - vectores
Concepto. En la mayoría de lenguajes de programación las matrices y los
vectores se constituyen como un conjunto de datos del mismo tipo que son
agrupados bajo un mismo nombre y donde se especifica la cantidad de elementos
que los componen, en Matlab para definir una matriz o un vector no es necesario
establecer su tamaño, el programa determina el numero de filas y de columnas de
acuerdo al número de elementos que se proporcione.
Los vectores se definen por filas o por columnas, por ejemplo un vector fila x se
expresa:
>>x=[1 5 6]
La respuesta de matlab es
x=
1
5
6
Un vector columna se expresa como
107
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA y=[1; 3; 6]
se observa en la pantalla como
y=
1
3
6
Operación con Vectores. Matlab permite realizar operaciones con vectores y con
matriz de datos. Las siguientes instrucciones nos permiten la manipulación de
vectores.
Dado los vectores p1 y p2, tenemos
•
p1+p2, p1-p2
Operaciones básicas con vectores
•
p’
Transpuesta de un vector
•
p=a:n:b
Genera un vector cuyas componentes van desde a hasta b
con intervalos de n
•
p(n)
Accede a la componente n del vector p
•
k*p1
Multiplica el vector p1 por el escalar k
•
p1.*p2
Multiplica elemento a elemento los vectores p1 y p2
•
p1.^n
Eleva a la enésima cada componente de p1.
En la siguiente tabla se muestran algunos ejemplos de las operaciones con
vectores.
108
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 9. Ejemplos de operaciones con vectores
Operación
1. [1 3 5 7] + [2 4 6 4]
1. Calcular
transpuesta
siguiente vector
[1 3 5 7]
Instrucción en Matlab
» p1=[1 3 5 7];
» p2=[2 4 6 4];
» p1+p2
ans =
3 7 11 11
» p1=[1 3 5 7];
» p1'
ans =
1
3
5
7
p1=[1 3 5 7];
» p1(3)
ans =
5
» p1=[1 3 5 7];
» 5*p1
ans =
5 15 25 35
» p1=[1 3 5 7];
» p2=[2 4 6 4];
» p1.*p2
ans =
2 12 30 28
la
del
2. Hallar el componente
número 3 del siguiente
vector
[1 3 5 7]
4. Calcular 5*[1 3 5 7]
3. Multiplicar
componente
a
componente
los
siguientes vectores
[1 3 5 7]
[2 4 6 4]
4. Elevar al cuadrado las » p1=[1 3 5 7];
componentes de
» p1.^2
[1 3 5 7]
ans =
1 9 25 49
Fuente: Juan Monroy (2007)
Funciones que actúan sobre Vectores
En la siguiente tabla se muestran algunas de las funciones que permiten trabajar
con vectores exclusivamente, tomando a x como un vector tenemos:
109
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 10. Funciones para trabajar con vectores
Función
[max,pos]=max(x)
min(x)
sum(x)
Mean(x)
prod(x)
[y,i]=sort(x)
Descripción
Devuelve el valor máximo de x y la posición que
ocupa
Devuelve el valor mínimo y la posición que ocupa
Suma los elementos de un vector
Retorna el valor medio de los elementos de un
vector
Producto de los elementos de un vector
Ordena de menor a mayor los elementos del vector
x. Devuelve el vector ordenado en y, y un vector i
con las posiciones iniciales en x de los elementos
ordenados
Fuente: Juan Monroy (2007)
Estas funciones se pueden aplicar a los vectores columna que componen una
matriz, si estas funciones se quieren aplicar a las filas de la matriz basta aplicar
dichas funciones a la matriz traspuesta.
Lección 7. Arreglos – matrices
Concepto. En Matlab la matriz es un conjunto de datos del mismo tipo al cual
debe asignársele un nombre. Para definir una matriz no hace falta establecer
previamente su tamaño ya que Matlab lo determina de acuerdo al número de
elementos que se ingresan. Las matrices se definen por filas, los elementos de
una misma fila están separados por espacios o comas, y las filas están separadas
por enter o punto y coma (;).
Por ejemplo la matriz
⎡ 1 2 3⎤
A = ⎢⎢4 5 6⎥⎥
⎢⎣7 8 9⎥⎦
Se define e ingresa en Matlab como
>> A=[1 2 3; 4 5 6; 7 8 9]
110
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA A=
123
456
789
Y lo muestra así:
Figura 95. Matriz en Matlab
Fuente: Tomado pantallazo Matlab versión Trial (2007
Operación Con Matrices. Matlab permute realizar las operaciones básicas al
igual que con los vectores y además proporciona comandos adicionales para
desarrollar otras operaciones.
Los comandos básicos son los siguientes. Dados las matrices a1 y a2:
•
•
•
•
•
•
•
•
•
•
•
•
a1+a2, a1-a2
a’
a(n,m)
k*a
a1.*a2
a.^n
Inv (a)
Det (a)
reshape(a,x,y)
b=a(:)
ones (n)
unos
eye (n)
Operaciones básicas con matrices
Transpuesta de la matriz a
Accede a la componente n,m de una matriz a
Multiplica la matriz a por el escalar k
Multiplica elemento a elemento las matrices a1 y a2
Eleva a la enésima cada componente de a1.
Calcula la inversa de una matriz
halla el determinante de a
cambia el orden de una matriz
convierte la matriz a en un vector
Crea una matriz cuadrada de orden n cuyos componentes son
Crea una matriz diagonal de orden n
111
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA A continuación se presentan algunos ejemplos
Tabla 11. Ejemplos de operaciones con matrices
Operación
Instrucción en Matlab
1.
⎡ 2 4 8 ⎤ ⎡ 1 7 − 1⎤
⎢ 1 6 7⎥ + ⎢ 8 4 6 ⎥
⎢
⎥ ⎢
⎥
⎢⎣− 3 9 5⎥⎦ ⎢⎣− 5 2 3 ⎥⎦
» a1=[2 4 8;1 6 7; -3 9 5];
» a2=[1 7 -1;8 4 6;-5 2 3];
» a1+a2
ans =
3 11 7
9 10 13
-8 11 8
2. Calcular la transpuesta » a1=[2 4 8;1 6 7; -3 9 5];
de
» a1'
ans =
2
4
8
⎡
⎤
2 1 -3
⎢ 1 6 7⎥
⎢
⎥
4 6 9
⎢⎣− 3 9 5⎥⎦
8 7 5
2. Calcular la inversa de
» a1=[2 4 8;1 6 7; -3 9 5];
» inv(a1)
⎡ 2 4 8⎤
ans =
⎢ 1 6 7⎥
⎢
⎥
-0.7174 1.1304 -0.4348
⎢⎣− 3 9 5⎥⎦
-0.5652 0.7391 -0.1304
0.5870 -0.6522 0.1739
3. Encontrar
el » a1=[2 4 8;1 6 7; -3 9 5];
componente (2,3) de » a1(2,3)
la matriz
ans =
7
⎡ 2 4 8⎤
⎢ 1 6 7⎥
⎢
⎥
⎢⎣− 3 9 5⎥⎦
4. Cambiar el orden de la a=[2 4 8 6;1 6 7 3; -3 9 5 1];
siguiente matriz
» reshape(a,2,6)
ans =
⎡ 2 4 8 6⎤
2 -3 6 8 5 3
⎢ 1 6 7 3⎥
⎢
⎥
1 4 9 7 6 1
⎢⎣− 3 9 5 1⎥⎦
7. Crear una matriz
diagonal de orden 4
» eye(4)
ans =
1 0 0 0
0 1 0 0
0 0 1 0
0 0 0 1
Fuente: Juan Monroy (2007)
112
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Funciones que actúan sobre Matrices. En la siguiente tabla se muestran
algunas de las funciones para el manejo de matrices, por supuesto que exige que
sus argumentos sean matrices (A).
Tabla 12. Funciones para el trabajar con matrices
Función
V = poly(A)
Descripción
Devuelve un vector v con los coeficientes del
polinomio característico de la matriz cuadrada A
t = trace(A)
Retorna la traza t (suma de los elementos de la
diagonal) de una matriz cuadrada A
[m,n] = size(A)
Devuelve el número de filas m y de columnas n de
una matriz rectangular A
N = size(A)
Devuelve el orden de una matriz cuadrada A
nf = size(A,1)
Devuelve el número de filas de A
nc = size(A,2)
Retorna el número de columnas de A
Exp(A)
Calcula la exp a cada uno de los elementos de la
matriz A
Sqrt(A)
Calcula la raíz cuadrad a cada uno de los
elementos de la matriz A
log(A)
Calcula el logaritmo en base diez a cada uno de los
elementos de la matriz A
B = inv(A)
Calcula la inversa de A.
D = det(A)
Retorna el determinante d de la matriz cuadrada A
X = linsolve(A,b) La función linsolve permite resolver sistemas de
ecuaciones lineales. Esta función no trata de
averiguar las características de la matriz que
permitan hacer una resolución más eficiente: se fía
de los datos suministrados por el usuario. Si son
incorrectos arrojara datos de igual tipo sin ningún
mensaje de error.
Fuente: Juan Monroy (2007)
Lección 8. Otras formas de definir matrices.
Además de la alternativa de definir una matriz a partir del teclado, es posible en
MATLAB utilizar otras formas más potentes y generales de definir y/o modificar
matrices.
Tipos De Matrices Predefinidos.
MATLAB dispone de varias funciones
orientadas que permiten definir fácilmente matrices de tipos particulares.
113
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Algunas de estas funciones son las siguientes:
Tabla 13. Funciones para trabajar con matrices particulares
Función
eye(3)
zeros(3,2)
Ones(2)
linspace(x1,x2,n)
Descripción
forma la matriz unidad de tamaño (3×3)
forma una matriz de ceros de tamaño (3×2)
forma una matriz de unos de tamaño (2×2)
genera un vector con n valores igualmente
espaciados entre x1 y x2
logspace(d1,d2,n) genera un vector con n valores espaciados
logarítmicamente entre 10^d1 y 10^d2. Si d2 es pi,
los puntos se generan entre 10^d1 y pi
Rand(4)
forma una matriz de números aleatorios entre 0 y 1,
con distribución uniforme, de tamaño (4×4)
randn(3)
forma una matriz de números aleatorios de tamaño
(3×3), con distribución normal, de valor medio 0 y
varianza 1.
magic(4)
crea una matriz (4×4) con los números 1, 2, ... 4*4,
con la propiedad de que todas las filas y columnas
suman lo mismo
produce una matriz con todos los productos de los
elementos del vector x por los elementos del vector
y. Equivalente a x'*y, donde x e y son vectores fila
Kron(x,y)
compan(pol)
construye una matriz cuyo polinomio característico
tiene como coeficientes los elementos del vector
pol (ordenados de mayor grado a menor)
Fuente: Juan Monroy (2007)
Existen otras funciones que puede consultar en el archivo matlab70primero.pdf de
la documentación anexa
Formación De Una Matriz A Partir De Otras. MATLAB permite crear una nueva
matriz a partir de otra o de otras, pero requiere de dos funciones auxiliares:
•
•
[m,n]=size(A) devuelve el número de filas y de columnas de la matriz A. Si
la matriz es cuadrada basta recoger el primer valor de retorno
n=length(x) calcula el número de elementos de un vector x
114
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 14. Formas de generar matrices a partir de otras
Función
zeros(size(A))
ones(size(A))
A=diag(x)
x=diag(A)
diag(diag(A))
blkdiag(A,B)
Triu(A)
Tril(A)
Descripción
Forma una matriz de ceros del mismo orden de la
matriz A previamente creada
Crea una matriz de unos del mismo orden de la
matriz A previamente creada
Forma una matriz diagonal A cuyos elementos
diagonales son los elementos del vector existente x
Genera un vector x a partir de los elementos de la
diagonal de la matriz A ya existente
Crea una matriz diagonal a partir de la diagonal
principal de la matriz A
Genera una matriz diagonal de submatrices a partir
de las matrices A y B
Forma una matriz triangular superior a partir de una
matriz A.
Forma una matriz triangular inferior a partir de una
matriz A.
Fuente: Juan Monroy (2007)
Operador dos Puntos (:). Este operador se puede usar de varias formas.
Ejemplos:
•
Definir un vector x de forma tal que sus elementos estén compuestos por
los números dados en un rango. El incremento por defecto es de 1,
>> x=5:10
x=
5 6 7 8 9 10
•
Definir un vector en un rango dado, con un incremento específico
>> x=5:1.5:10
x=
5.0000 6.5000 8.0000 9.5000
115
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA •
Extraer los elementos de una fila de la matriz A
>> A=magic(3)
A=
15 0 6
7 32 7
1 22 20
•
El siguiente comando extrae los 2 primeros elementos de la segunda fila:
>> A(2, 1:2)
ans =
7 32
•
El siguiente comando extrae todos los elementos de la primera fila:
>> A(1, :)
ans =
15 0 6
•
Los elementos de la última fila se extraen con el comando
>> A(end, :)
ans =
1 22 20
•
Extraer los elementos de determinadas filas
>> A([1 3],:)
ans =
15 0 6
1 22 20
Reemplazar los elementos de determinadas filas de una matriz B por las de otra
matriz A
>> B([1 2 3],:)=A(1:3,:)
116
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA B=
15 0 6
7 32 7
1 22 20
Lección 9. Estructuras
Concepto. Las estructuras son elementos que pueden almacenar variables de
diferente tipo bajo un mismo nombre, por ejemplo podemos crear una estructura
que contenga el nombre del estudiante, código y genero. A diferencia de los
lenguajes de programación, no hace falta definir previamente el modelo o patrón
de la estructura.
Una posible forma de hacerlo es crear uno a uno los distintos campos, como en el
ejemplo siguiente:
>> estudiante.nombre='Pedro'
estudiante =
nombre: 'Pedro'
>> estudiante.codigo=123456789
estudiante =
nombre: 'Pedro'
codigo: 123456789
>> estudiante.genero=’M’
estudiante =
nombre: 'Pedro'
codigo: 123456789
genero=’M’
Para el acceso a los miembros o campos de una estructura se utiliza el operador
punto (.), este se ubica entre el nombre de la estructura y el nombre del campo
(por ejemplo: estudiante.nombre).
También puede crearse la estructura por medio de la función struct():
>> estudiante = struct('nombre', 'Pedro', 'codigo', 76589,’genero’,’M’)
estudiante =
nombre: 'Pedro'
codigo: 123456789
genero=’M’
117
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Pueden crearse vectores y matrices (e hipermatrices) de estructuras. La siguiente
instrucción da un ejemplo:
>> estudiante (8) = struct('nombre', 'Pedro', 'codigo', 76589,’genero’,’M’)
Por medio de esta instrucción se crea un vector de 8 elementos donde el octavo
elemento es inicializado con los argumentos de la función struct(); el resto de los
campos se inicializan con valores vacios
Para añadir nuevos campos a la estructura simplemente se realiza como si se
accediera a él para darle un valor
>> estudiante(5).edad=44;
Funciones para operar con estructuras. Algunas de las funciones que se
pueden utilizar en Matlab para el manejo de las estructuras son las siguientes:
Tabla 15. Funciones para operar con estructuras
Función
fieldnames()
isfield(E,s)
isstruct(E)
rmfield(E,s)
getfield(E,s)
setfield(E,s,v)
Descripción
Devuelve un vector de celdas con cadenas de
caracteres que recogen los nombres de los campos
de una estructura
Determina si la cadena s es un campo de una
estructura E
Permite determinar si E es o no una estructura
Elimina el campo s de la estructura E
Retorna el valor del campo especificado s. de la
estructura E.
Asigna el valor v al campo s de la estructura E.
Fuente: Juan Monroy (2007)
Estructuras Anidadas. MATLAB permite definir estructuras anidadas, es decir
estructuras con campos que a la vez son estructuras. Para acceder a los campos
de la estructura más interna se utiliza dos veces el operador punto (.), como puede
verse en el siguiente ejemplo
118
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA >> clase=struct('Zona','Boyacá','Cead','Sogamoso', ...
'estudiante', struct('nombre','Maria', 'edad',25))
clase =
Zona: 'Boyacá'
Cead: 'Sogamoso'
estudiante: [1x1 struct]
>> clase.estudiante(2).nombre='José';
>> clase.estudiante(2).edad=27;
>> clase.estudiante(2)
ans =
nombre: 'José'
edad: 27
>> clase.alum(1)
ans =
nombre: 'Maria'
edad: 25
Lección 10. Aplicaciones
Retomando el ejercicio de la lección 9 y 10 en donde se pedía encontrar las
corrientes de malla I1, I2 e I3 del circuito:
Figura 96. Circuito para manejo de mallas
R1
10
I1
R2
4
+
-
Vs1
10V
I2
R3
8
R4
5
I3
Fuente: Juan Monroy (2007)
Se Define el sistema de ecuaciones de malla del circuito.
22 ⋅ I 1 − 4 ⋅ I 2 − 8 ⋅ I 3 = 0
− 4 ⋅ I 1 + 9 ⋅ I 2 − 5I 3 = 10
− 8 ⋅ I 1 − 5I 2 + 23 ⋅ I 3 = 0
119
R5
10
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Resolviendo el sistema proseguimos a encontrar el determinante de la matriz A:
22
− 4 −8
Δ = − 4 9 − 5 = 2740
− 8 − 5 23
Una vez que hemos encontrado el determinante de la matriz A procedemos a
buscar las incógnitas del sistema en este caso I1, I2 e I3.
I1 =
0 −4 −8
10 9 − 5
0 − 5 23
Δ
=
1320
= 0.4848 A
2740
=
4420
= 1.61A
2740
=
1420
= 0.51A
2740
22 0 − 8
− 4 10 − 5
I2 =
I3 =
−8
0
23
Δ
22 − 4 0
− 4 9 10
−8 −5 0
Δ
Matlab nos permite el cálculo de las corrientes mediante el cálculo de los
determinantes de la siguiente forma
» a=[22 -4 -8;-4 9 -5;-8 -5 23];
» det(a)
ans =
2740
» b=[0 -4 -8;10 9 -5;0 -5 23];
» I1=det(b)/det(a)
120
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA I1 =
0.4818
» a=[22 -4 -8;-4 9 -5;-8 -5 23];
» c=[22 0 -8;-4 10 -5;-8 0 23];
» I2=det(c)/det(a)
I2 =
1.6131
» d=[22 -4 0;-4 9 10;-8 -5 0];
» a=[22 -4 -8;-4 9 -5;-8 -5 23];
» I3=det(d)/det(a)
I3 =
0.5182
CAPÍTULO 3: FUNDAMENTOS DE PROGRAMACIÓN
Introducción. Este último capítulo esta dedicado a conocer los fundamentos de
programación, de forma tal que se conviertan en herramientas valiosas en el
momento de crear código para ejerce control sobre ciertos procesos o sistemas a
partir de elementos microprocesados o micrcontrolados.
Lección 11. Conceptos y tipos de datos
En esta unidad se busca conocer los elementos básicos en la programación y a
partir de ellos definir soluciones a problemas de programación a bajo nivel,
conceptos fundamentales para el manejo de circuitos programables.
Conceptos. Un algoritmo es un conjunto de pasos lógicos, exentos de
ambigüedad, que buscan solucionar un problema determinado.
Los algoritmos se pueden representar a partir de diagramas de flujo o de
pseudocódigo.
Pseudocódigo: El pseudocódigo utiliza palabras del lenguaje cotidiano para
reasentar así el conjunto de pasos a seguir. Dentro de las palabras están:
121
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 16. Palabras clave en el pseudocódigo
PALABRA
DESCRIPCIÓN
Inicio
Determina el punto de partida del algoritmo, o de una
subrutina
Fin
Finaliza el algoritmo, o una subrutina
Leer
Representa la captura de información a través de
cualquier medio o dispositivo de entrada.
Imprimir
Representa la visualización de información a través de
cualquier medio o periférico de salida.
SI..Entonces
SI..Entonces..De
contrario
Permite diseñar condicionales
lo
Además de la condición permite determinar las
instrucciones a ejecutar si la condición no se cumple.
Y, O
Permiten realizar operaciones lógicas al diseñar una
condición
En caso de
Evalúa el valor de una variable dentro de un conjunto
de posibles alternativas.
Para
Determina el número de veces a repetir un conjunto
de instrucciones.
Mientras
Hacer..mientras
Repite un grupo de instrucciones tantas veces como
se cumpla una condición evaluada al inicio de cada
ciclo repetitivo.
Repite un grupo de instrucciones tantas veces como
se cumpla una condición evaluada al final de cada
ciclo repetitivo.
Fuente: Juan Monroy (2007)
Diagrama de Flujo: El diagrama de flujo utiliza símbolos gráficos para representar
el conjunto de pasos del algoritmo. Dentro de estos símbolos básicos y que se
requieren para estructurar algoritmos para programación a bajo nivel tenemos:
122
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 17. Simbología utilizada en los diagramas de flujo
SÍMBOLO
DESCRIPCIÓN
Determina el punto de partida del algoritmo
Finaliza el algoritmo, o permite definir el inicio de una
subrutina
Representa la captura de información a través de
cualquier medio o dispositivo de entrada.
Representa la visualización de información a través de
cualquier medio o periférico de salida.
Permite diseñar condicionales
Permite estructurar el desarrollo de una operación
aritmética o lógica.
Indica el sentido en el que se ejecutan las
instrucciones
Fuente: Juan Monroy (2007)
Tipos de datos. Aunque para la programación abajo nivel se manejan únicamente
representaciones binarias de la información, es importante reconocer que a nivel
de computadores existen los siguientes tipos de datos:
•
Numéricos: Aquel conjuntos de datos que representa cifras numéricas ya
sea su parte entera únicamente (números enteros), o su parte entera y
decimal (números reales).
Ejemplo
Enteros: 45; 56;
78;
-34
Reales: 23.56;
5789.09;
0.00000067;
123
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA •
Alfanuméricos: Conjunto de datos formados por información de tipo
carácter, la cual puede agruparse para formar las cadena de caracteres, o
presentarse de manera individual formando el carácter.
Ejemplo
Caracteres: ‘4’;
‘i’;
Cadenas: “hola Mundo”;
•
‘A’
“Unad”;
“Cad Electrónica 1911”
Boléanos: Son datos que pueden presentar únicamente dos valores
posibles, ya se un 1 lógico o un cero lógico, los cuales representan la
presencia o ausenta de voltaje y dependiendo del contexto pueden
significar la presencia de 5 voltios y 0 voltios respectivamente, 3.3 v y 0 v,
Lección 12. Instrucciones e/s y selección
Instrucciones de Entrada/Salida. Como se mostró con anterioridad, existen
elementos que permiten definir el procedimiento para la captura de información y
la visualización de resultados, en cada uno de estos procesos interviene
elementos tanto para la captura de los datos, así como para su visualización,
estos elementos pueden ser por ejemplo sensores, interruptores, pulsadores,
cualquier elementos que permita realizar la captura de una señal, de igual forma
para la visualización podemos utilizar: leds, display siete segmentos, matriz de
leds, motores, etc, es decir cualquier elemento que permita reflejar el resultado de
la información procesada; sin embargo a nivel de algoritmo esto no tiene
relevancia ya que solo necesitamos representar la operación, esto cobra
importancia en el momento del diseño del circuito.
Figura 97. Diagrama de la estructura general de un sistema.
•
•
•
•
Sensores Interruptores Pulsadores Salida Ctos •
•
•
•
PROCESAMIENTO
ENTRADA SALIDA Pseudocódigo: LEER Pseudocódigo: IMPRIMIR
Diagrama Diagrama de Flujo Fuente: Juan Monroy (2007)
Leds Display Siete Segmentos Matriz de leds Motores 124
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Instrucciones de Selección. Este tipo de instrucciones permite decidir entre
ejecutar un grupo de instrucciones o no, dependiendo de que se cumpla o no una
condición. La condición se evalúa para determinar si es cierta, es decir si su valor
de verdad es verdadero.
Comparadores. La condición se diseña comparando dos elementos a parir de los
siguientes comparadores:
•
Mayor que
>
•
Menor que
<
•
Mayor o igual
>=
•
Menor o igual
<=
•
Igual
=
•
Diferente
<>
Ejemplo
•
a>b
•
A>=56
•
78<=B
; no se puede determinar su valor de verdad ya que se
desconoce el valor de la variable B
•
34<>56
;su valor de verdad (verdadero) se puede determinar ya que
se están comparando dos constantes
; la respuesta a esta comparación solo puede ser verdadera o falsa
;se compara una variable con una constante
Operadores lógicos. Si se necesita hacer más de una comparación, se requiere
el uso de operadores lógicos, los cuales operan los valores de verdad de cada
comparación para así llegar a un único valor.
Los operadores lógicos utilizados son el “y” y el “o”, cuyas tablas de verdad se
relacionan a continuación.
125
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA •
Operador “y”, “^”, “and”
Tabla 18. Valores de verdad operador “and”
C1
V
V
F
F
C2
V
F
V
F
C1 y C2
V
F
F
F
Fuente: Juan Monroy (2007)
•
Operador “o”, “v”, “or”
Tabla 19. Valores de verdad operador “or”
C1
V
V
F
F
C2
V
F
V
F
C1 o C2
V
V
V
F
Fuente: Juan Monroy (2007)
Condicionales. Una vez tratados los comparadores y operadores lógicos vamos a
trabajar con la condicional a partir de un ejemplo y mostrando el algoritmo en
pseudocódigo y en diagramas de flujo, pero antes vamso a considerar la sintaxis
de cada uno de ellos
Sintaxis Diagrama de Flujo
126
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 98. Sintaxis diagrama de flujo de la instrucción condicional
•
•
•
Condición No Si Instrucciones a ejecutar si se cumple la condición
Instrucciones a ejecutar si NO se cumple la condición
•
•
•
•
•
•
Fuente: Juan Monroy (2007)
La ubicación del “Si” o el “No”, pueden ir en cualquiera de las puntas de rombo, lo
importante es definir claramente cada uno de los caminos a tomar dad la
respuesta cierta ó falsa de la condición.
Sintaxis Pseudocódigo
Si (Condición) entonces
_______
_______ Instrucciones a ejecutar si se cumple la condición
_______
De lo contrario
_______
_______ Instrucciones a ejecutar si no se cumple la condición
_______
Fin si
Es importante aclarar que no es posible que exista un “De lo contrario” sin la
presencia de un Si… entonces
127
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Ejemplos
Ejemplo 1. Suponga que s requiere realizar un programa que determine cuales el
mayor de dos números:
Solución.
Es necesario tener en cuenta que los dos números deben ser leídos (ingresar a
través de cualquier dispositivo de entrada), los vamos a denominar N1 y N2
Pseudocódigo
Inicio
Leer N1
Leer N2
Si N1>N2 entonces
Imprimir N1
De lo contrario
Imprimir N2
Fin Si
Fin
Figura 99. Diagrama de Flujo para determinar el mayor de dos números
Inicio N1, N2 Si N1>N2 No N1 N2 Fin Fuente: Juan Monroy (2007)
128
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Ejemplo 2. Realizar un algoritmo para determinar el mayor de tres números.
Pseudocódigo
Inicio
Leer N1,N2,N3
Si (N1>N2) y (N1>N3) entonces
Imprimir N1
De lo contrario
Si (N2>N3)
Imprimir N2
De lo contrario
Imprimir N3
Fin si
Fin si
Fin
El primer Si determina si el mayor de los tres número es N1, si esto no es cierto,
queda por evaluar cual de los otros dos números es mayor, N2 o N3.
Figura 100. Diagrama de Flujo para determinar el mayor de tres números
Inicio N1, N2,N3 Si N1>N2 y N1>N3
No N1 Si N2>N3 No N2 Fin Fuente: Juan Monroy (2007)
129
N3 UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Ejemplo 3. Realice un algoritmo que determine si una vocal leída es abierta o
cerrada
Pseudocódigo
Inicio
Leer vocal
Si (vocal=’a’) o (vocal=‘e’) o (vocal=’o’) entonces
Imprimir “Vocal Abierta”
De lo contrario
Imprimir “Vocal Cerrada”
Fin si
Fin
Es necesario utilizar el operador “o” ya hay tres posibilidades de que la vocal sea
abierta, por tanto al evaluar cada una de ellas “a”, “e” y “o” se debe llegar a la
misma respuesta.
Figura 101. Diagrama de Flujo que determina si una vocal es abierta o cerrada
Inicio vocal Si (vocal = ‘a’) O (vocal = ‘e’) O No “Vocal Abierta Vocal Cerrada Fin Fuente: Juan Monroy (2007)
130
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 13. Instrucciones repetitivas
Ordenes que permiten repetir un número determinado de veces la ejecución de un
grupo de instrucciones. Básicamente encontramos tres tipos de instrucciones:
PARA. Se recomienda su uso cuando se conoce de antemano el número de
veces a repetir.
Sintaxis
Para variable=valor inicial, hasta valor final, variable=variable+incremento
_________
_________ Instrucciones a repetir
_________
Fin para
La variables es la que lleva el conteo del número de veces que se ha repetido las
instrucciones, por ello debe tener un valor inicial y un valor final, para poder llevar
el conteo es necesario determinar de cuanto en cuanto se cuenta, de ahí que sea
necesario definir el “incremento” de la variable
Ejemplo Realice un algoritmo para imprimir los número de 1 hasta 20
Pseudocódigo
Inicio
Para i=1, hasta 20, i=i+1
Imprimir i
Fin para
Fin
131
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 102. Diagrama de flujo para generar los número de 1 a 20
Inicio i=1 i i=i+1 i=20 No Si Fin Fuente: Juan Monroy (2007)
MIENTRAS. Se utiliza cuando es necesario verificar una condición antes de
ejecutar cada uno de los ciclos posibles de repeticiones.
Sintaxis
Mientras (Condición)
_________
_________ Instrucciones a repetir
_________
Fin Mientras
Ejemplo. Realice un programa que determine el número de divisores de un
número m. Suponemos la existencia de una función Residuo que calcula el resto
de una división.
132
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Pseudocódigo
Inicio
Leer m
Divisor=1
Cantidad_divisores=0
Mientras (Divisor<=m)
If (Residuo(m,Divisor)=0) entonces
Cantidad_divisores=Cantidad_divisores+1
Fin si
Divisor=Divisor+1
Fin Mientras
Imprimir (Cantidad_divisores)
Fin
En la siguiente figura se muestra el diagrama de flujo correpsondiente
133
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 103. Diagrama de Flujo para determinar la cantidad de divisores de un
número.
Inicio m
Divisor=1 No Divisor<=m Si
Residuo(m,Divisor) =0 Si
Cantidad_divisores=Cantidad_divisores+1 Divisor=Divisor+1 Cantidad_divisores Fin Fuente: Juan Monroy (2007)
134
No UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA HACER .. MIENTRAS. Se usa cuando es necesario repetir un grupo de
instrucciones y al final de cada ciclo determinar si es necesario volver a repetir o
no.
Sintaxis
Hacer
_________
_________ Instrucciones a repetir
_________
Mientras (Condición)
Ejemplo.
Realice un programa que realice una división entera entre dos números A y B a
partir de restas sucesivas. Suponemos A mayor que B
Pseudocódigo
Inicio
Leer A
Leer B
Cociente=0
Hacer
A=A-B
Cociente=Cociente+1
Mientras (A>B)
Imprimir (Cociente)
Fin
En la siguiente figura se muestra el diagrama de flujo correspondiente
135
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Figura 104. Diagrama de Flujo para realizar una división entera entre dos números
a partir de restas sucesivas
Inicio A,B Cociente=0 A=A‐B Cociente=Cociente+1 A>B Si
No
Cociente Fin Fuente: Juan Monroy (2007)
136
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Lección 14. Fundamentos de programación en matlab
MATLAB es una aplicación en la que se puede programar, es decir configurar una
serie de instrucciones para que se realice una tarea específica, no es tan potente
como un lenguaje de Programación como C++ o Java, pero ofrece un buen
número de posibilidades y se convirtiéndose en una herramienta importante de
aprendizaje en los fundamentos de programación, esenciales en la
implementación de circuitos programables.
Operadores Relacionales. MATLAB utiliza la siguiente simbología para el
manejo de operadores relacionales:
< menor que
> mayor que
<= menor o igual que
>= mayor o igual que
== igual a
~= diferente a
Al igual que en C, si una comparación se cumple el resultado es 1 (true), mientras
que si no se cumple es 0 (false). Recíprocamente, cualquier valor distinto de cero
es considerado como true y el cero equivale a false.
Ejemplo
>> A=[5 -3;2 1]; B=[0 -3;1 7];
>> A==B
ans =
01
00
Operadores Lógicos. La simbología que utiliza MATLAB para los operadores
lógicos son:
137
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Tabla 20. Operadores lógicos en Matlab
Operador
&
&&
|
||
~
xor(A,B)
Descripción
(y). Se evalúan siempre el valor de verdad de los dos
operandos, el resultado es true sólo si ambos son true.
(y breve). No necesariamente termina evaluando los dos
operandos, si el primer operando es false ya no se
evalúa el segundo, esto porque el resultado final ya no
puede ser más que false. Es muy útil sobre todo cuando
se trabaja con matrices, reduciendo el tiempo de cálculo
y proceso
(o) Retorna false si al evaluar ambos operandos cada
uno de ellos es false de lo contrario devuelve true.
(o breve). si el primer operando es true ya no se evalúa
el segundo, pues el resultado final no puede ser más
que true.
Negación lógica, si el operando es true retorna false
Realiza un "o exclusivo", es decir, devuelve false si
ambos operandos tienen el mismo valro de verdad de lo
contrario retorna trae
Fuente: Juan Monroy (2007)
El siguiente ejemplo muestra como se utilizan los operadores y a la vez como
filtrar un posible error de división por cero al usar un operador breve
r = (b~=0) && (a/b>0);
Condicionales. MATLAB dispone de instrucciones sentencias para realizar las
condicionales, vistas en las lecciones anteriores
Instrucción If
Sintaxis general
if condicion
sentencias
end
138
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Sintaxis de bifurcación múltiple es decir se concatenan las condiciones en función
de lo que se desea evaluar o ejecutar
if condicion1
bloque1
elseif condicion2
bloque2
elseif condicion3
bloque3
else % opción por defecto para cuando no se cumplan las condiciones 1,2,3
bloque4
end
Ejemplo
>>r=30000;
>>if r==10000
disp (‘Resistencia de 10 kilo ohmios’)
elseif r==20000
disp (‘Resistencia de 20 kilo ohmios’)
elseif r==30000
disp (‘Resistencia de 30 kilo ohmios’)
end
Resistencia de 30 kilo ohmios
Instrucción Switch
La instrucción switch realiza una tarea análoga a los if...else if concatenados.
Sintaxis
switch expresion
case Valor1,
bloque1
case {Valor2, Valor3, Valor4}
bloque2
...
otherwise, % opción por defecto
bloque3
end
139
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Los bloques de instrucciones deben ubicarse hacia la derecha según la
dependencia de la instrucción anterior a ella, esto se hace para que el programa
resulte más legible, resultando más fácil ver dónde empieza y termina la
bifurcación o el bucle. Es muy recomendable seguir esta práctica de
programación.
En la sintaxis la palabra expresión hace referencia a la variable o resultado de
operación que se pretende evaluar, este se compara con casa uno de los posibles
valores ubicados como Valor1, Valor2, etc, si resulta ser igual a uno de ellos, se
ejecuta el bloque de instrucciones que dependan de ello, si no resulta ser igual a
alguno de estos valores se ejecutar lo que dependa de otherwise.
>>r=30000;
>>switch r
case 10000
disp (‘Resistencia de 10 kilo ohmios’)
case 20000
disp (‘Resistencia de 20 kilo ohmios’)
case 30000
disp (‘Resistencia de 30 kilo ohmios’)
end
Resistencia de 30 kilo ohmios
Lectura Y Escritura Interactiva De Variables. A continuación se da una
explicación de cómo utilizar una forma sencilla de leer variables desde teclado y
escribir mensajes en la pantalla.
Función Input. La función input permite capturar un valor digitado por el usuario,
para ello permite imprimir un mensaje en la línea de comandos de MATLAB, con el
fin de guiar al usuario en el proceso; después de imprimir el mensaje, el programa
espera que el usuario teclee el valor numérico o la expresión; el usuario puede
teclear los valores de un vector o matriz o en general cualquier expresión, esta es
evaluada con los valores actuales de las variables de MATLAB y el resultado se
devuelve como valor de retorno.
Ejemplo
>> semestre = input('Por favor digite el semestre que cursa')
140
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA La variable semestre almacenará un valor de tipo numérico
Otra forma de emplear la función es estableciendo que no evalúe la expresión
introducida por el usuario (a través del parámetro 's') así:
>> nombre = input('¿Digite su nombre?','s')
Acá la expresión digitada por el usuario no es evaluada y se almacena en la
cadena nombre como texto.
Función Disp La función disp permite imprimir en pantalla un mensaje de texto o
el valor de una matriz, pero sin imprimir el nombre de la variable. En realidad, disp
siempre imprime vectores y/o matrices: las cadenas de caracteres son un caso
particular de vectores. Considérense los siguientes ejemplos de cómo se utiliza:
>> disp('Gracias por su atención ')
>> nombre = input('¿Digite su nombre?','s')
>> disp(nombre)
Lección 15. Instrucciones repetitivas y funciones en matlab
Instrucciones Repetitivas
Instrucción For. La instrucción for repite un conjunto de instrucciones un número
predeterminado de veces. A continuación se muestra su sintaxis en Matlab
for i=1:n
Instrucciones a repetir
end
Esto hace que la variable i tome los valores desde 1 hasta n, incrementándose de
a uno en uno por cada repetición que ejecute.
Es posible hacer que los valores que tome la variable i, se asignen desde un
vector (vector_de_valores) así:
141
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA for i=vector_de_valores
Instrucciones a repetir
end
También es posible determinar el valor del incremento así:
for i=m:-0.5:10
Instrucciones a repetir
end
La variable i toma valores desde m, decrementándose de -0.5 en -0.5 hasta que
sea menor a 10.
Una última sintaxis para la instrucción for es la siguiente (tenga en cuenta que A
es una matriz). Aca la variable i es un vector que va tomando en cada iteración el
valor de una de las columnas de A.
for i=A
Instrucciones a repetir
end
Cuando se introducen interactivamente en la línea de comandos, los for se
ejecutan sólo después de introducir la sentencia end que los completa.
A continuación mostramos el código en Matlab para el algoritmo ejemplo de la
instrucción Para dado en el Tema 17.
>> for i=1:10
disp (i)
end
1
2
3
4
5
6
7
8
9
10
142
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA Instrucción While. La estructura de la instrucción tiene la siguiente sintaxis
while condicion
Instrucciones a repetir
end
Los ciclos repetitivos terminan cuando todos los elementos de condicion sean
false (es decir, cero).
A continuación mostramos el código en Matlab para el algoritmo ejemplo de la
instrucción Mientras dado en el Tema 17.
>> m = input('Por favor digite un número ');
Por favor digite un número 8
>>Divisor=1;
>>Cantidad_divisores=0;
>>while Divisor<=m
If mod(m,Divisor)==0
Cantidad_divisores=Cantidad_divisores+1;
end
Divisor=Divisor+1;
end
>>disp (Cantidad_divisores)
4
Funciones En Matlab. Una función es un conjunto de instrucciones que cumplen
una tarea específica y que se agrupan bajo un nombre, una función tiene nombre,
valor de retorno y argumentos; se invoca utilizando su nombre en una expresión
o como un comando más. Las funciones se pueden definir en ficheros de texto *.m
como se explica mas adelante.
Considérense los siguientes ejemplos de llamada a funciones:
>> n=length(x);
calcula el número de elementos de un vector x
>> a = cos(ang);
Calcula el coseno del ángulo almacenado en ang
143
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA En MATLAB es posible manejar funciones que no tienen argumentos, éstas no
llevan paréntesis, por lo que a simple vista no es fácil diferenciarlas de simples
variables.
Definición de Funciones. Para definir las funciones es necesario digitar el código
como un archivo ASCII, es decir un archivo tipo texto sin formato, para ello se
puede utilizar cualquier editor de texto y grabando el archivo sin formato y con
extensión .m. La primera línea de un archivo que contenga el código o
instrucciones de una función debe tener la forma: function [lista de valores de
retorno] = name(lista de argumentos) donde name es el nombre de la función.
Entre corchetes y separados por comas van los valores de retorno (siempre que
haya más de uno), y entre paréntesis también separados por comas los
argumentos. Puede haber funciones sin valor de retorno y también sin
argumentos. Los argumentos son los datos de la función y los valores de
retorno sus resultados. La ejecución de una función termina cuando se llega a su
última sentencia ejecutable. Si se quiere forzar el que una función termine de
ejecutarse se puede utilizar la sentencia return, que devuelve inmediatamente el
control al entorno de llamada.
A continuación se muestra un ejemplo de la forma como quedaría la típica primer
función a realizar cuando se aprende a programar
function holamundo()
dispo (‘hola Mundo’)
end
Para ampliar el tema de la definición o creación de funciones consulte la página 76
de el archivo anexo ‘matlab70primero.pdf’ donde se explica con mayor detalle
cada uno de los pasos a seguir, antes de hacer dicha consulta debe inspeccionar
la temática del debugger para conocer el editor de texto de Matlab
144
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA ACTIVIDAD DE AUTOEVALUACIÓN UNIDAD 2
Se plante el siguiente problema para que a través de él se haga un ejercicio de
autoevaluación para poder identificar aquella temática en la cual se debe reforzar
el trabaja o hacer mayor profundización y consulta
1. Grafique las funciones sinusoidales del ejercicio de autoevaluación de la Unidad
uno, duplicando su amplitud.
2. Realice un programa en Matlab que permita leer dos matrices y promediar el
valor de sus diagonales. Las matrices deben ser de 4x4.
3. Realice un programa en Matlab que capture el valor en ohmios de una
resistencia, y exprese dicho valor en la unidad mas conveniente, la unidad mas
conveniente es aquella en la que menor cantidad de cifras se utilice, por ejmplo
10000000 ohmios equivale a 10 Megaohmios
Tabajar hasta el rango de Gigaohmios.
145
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA FUENTES DOCUMENTALES UNIDAD 2
BIBLIOGRAFIA
Microprocesadores y Microcontroladores
Barry Brey. (1994). Los microprocesadores Intel avanzados. Mexico: Noriega.
Herbert Tabú. (1983). Circuitos digitales y microprocesadores. España: McGraw
Hill.
José Adolfo González Vásquez.(1994). Introducción a los microcontroladores de
16 Bits. España: McGraw Hill.
Peter Abel. (1996). Lenguaje ensamblador y programación para PC IBM y
compatibles. Mexico: Pearson.
Modelamiento Matemático
Allen Angel. (1992). Álgebra intermedia. Mexico: Prentice Hall.
Ayres, Jr. (1991). Cálculo diferencial e integral (3ra Ed). España: McGraw Hill.
Granville. (1996). Cálculo diferencial e integral. Mexico: Limusa.
Grossman (1996). Álgebra lineal. Colombia: McGraw Hill.
Larson. (1994). Introducción al Algebra Lineal. Mexico: Limusa.
Señales y Sistemas
Papoulis (1986). Sistemas digitales y analógicos, transformadas en FOURIER,
estimación espectral. España: Marcombo.
Arnold. (1992). Sistema moderno de procesamiento de datos.
Irarrazaval. (1999). Análisis de señales. Chile: McGraw Hill.
146
Mexico: Limusa.
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA SITIOS WEB
Microprocesadores microcontroladores
The EE compendion. (2009). [en línea]. Recuperado el 19 de Julio de 2009, de
http://ee.cleversoul.com/
Arquitectura RISC, Vs Cisc. (). [en línea]. Recuperado El 19 de Julio de 2009, de
http://www.azc.uam.mx/publicaciones/enlinea2/num1/1-2.htm
Microprocesadores. [en Línea]. Recuperado el 19 de julio de 2009, de
http://www.duiops.net/hardware/micros/micros.htm
Microcontroladores. (). [en Línea]. Recuperado El 19d e julio de 2009, de
http://www.geocities.com/TheTropics/2174/micro.html
Programación
Técnicas de Diseño de Algorimos. (2000). [en Línea]. Recuperado el 19 de julio de
2009, de http://www.lcc.uma.es/~av/Libro/indice.html
Algoritmos. (1997). [en línea]. Recuperado el 19 de julio de 2009 de,
http://www.monografias.com/trabajos15/algoritmos/algoritmos.shtml
Ensamblador Lenguaje de Bajo Nivel (2004). [en Línea]. Recuperado el 19 de julio
de 2009, de http://mx.geocities.com/alfonsoaraujocardenas/ensamblador.html
Conceptos de Lenguajes de Programación. (2005). [en Línea]. Recuperado el 19
de julio de 2009, de
http://www.mailxmail.com/curso/informatica/programacionestructurada/capitulo4.ht
m
Arquitectura de Ordenadores I. [en Línea]. Recuperado el 19 de Julio de 2009, de
http://www-gist.det.uvigo.es/~martin/ao1/lec11.pdf
Descargas
Scilab 5.1.1. (2009). [en Línea]. Recuperado el 19 de julio de 2009 de,
http://scilab.softonic.com/
147
UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA – UNAD
ESCUELA DE CIENCIAS BÁSICAS TECNOLOGÍA E INGENIERÍA CONTENIDO DIDÁCTICO DEL CURSO: 302526 – CAD PARA ELECTRÓNICA TheMathWorks. (2009). [en Línea]. Recuperado el 19 de julio de 2009, de
http://www.mathworks.com/products/matlab/
Aprenda matlab 7.0. (2005). [en Línea] . Recuperado el 19 de julio de 2009, de
http://mat21.etsii.upm.es/ayudainf/aprendainf/Matlab70/matlab70primero.pdf
Proteus. (2009). [en Línea]. Recuperado el 19 de julio de 2009, de
http://www.ieeproteus.com/descarga.html
Altium Designer. (2009). [en Línea]. Recuperado el 19 de Julio de 2009, de
http://www.altium.com/index.cfm?03CC4A65-7E95-D748-0AD7-16EDFB1812AE
148