Contador de objetos - Facultad Regional San Nicolás
Anuncio

Técnicas digitales III –Problema de ingeniería-
UNIVERSIDAD TECNOLÓGICA NACIONAL
FACULTAD REGIONAL SAN NICOLÁS
INGENIERIA ELECTRÓNICA
TÉCNICAS DIGITALES III
Problema de ingeniería
“Seguimiento y conteo de botellas mediante visión artificial”
Integrantes:
Villarruel, Cristian
Correa, Sergio
Serra, Pedro E.
Docentes:
Ing. Poblete, Felipe
Ing. González, Mariano
AÑO 2015
1
Técnicas digitales III –Problema de ingeniería-
Seguimiento y conteo de botellas mediante visión artificial.
Objetivos:
En éste trabajo practico, implementaremos la detección, reconocimiento de botellas y
seguimiento en tiempo real, sobre una imagen de cámara de video, para ser contadas
por unidad, a los fines de conocer la producción de la planta.
Convengamos que se le puede dar mas usos además de conteo (como ser grabación
de las imágenes para usos de control de calidad, medición de velocidad, etc), frente a
un sistema de conteo por sensores industriales. También se puede adaptar para contar
vehículos sobre una carretera, gente en un centro comercial, otras piezas de producción
en movimiento, etc.
2
Técnicas digitales III –Problema de ingeniería-
Introducción
Para simular el sistema, se utilizó una maqueta de la cinta transportadora, una PC con
windows XP, una webcam Genius , y como software específico, Visual Studio Express y
OpenCV 2.4.9 para el lenguaje de programación C/C++.
La cámara de video Genius tipo webcam de 640x480 pixeles , es usada en la maqueta
por su bajo costo, pero puede mejorarse.
3
Técnicas digitales III –Problema de ingeniería-
Diagrama de bloques del sistema de conteo:
Uno de los aspectos más importantes de la visión artificial es sin duda el reconocimiento
de objetos, de patrones, o identificación de figuras y formas. Este reconocimiento puede
ir desde ejemplos muy simples (reconocer en una imagen el único objeto de color rojo),
hasta posibilidades muy complejas y útiles que aún hoy son prácticamente imposibles
(como cámaras de aeropuerto que detecten terroristas automáticamente reconociendo
su cara). Este problema plantea un gran reto, pero son infinitas sus posibilidades y
aplicaciones. En un futuro se plantea que los robots humanoides tengan un sistema
avanzado de reconocimiento de objetos, siendo capaz como los humanos de reconocer
a las personas por sus caras, y los demás objetos de su entorno.
4
Técnicas digitales III –Problema de ingeniería-
1. Breve funcionamiento de la cámara:
La luz de la imagen pasa por la lente, esta se refleja en un filtro RGB (Red-Green-Blue),
el cuál descompone la luz en tres colores básicos: rojo, verde y azul.
Esta división de rayos se concentra en un chip sensible a la luz denominado CCD
("Charged Coupled Device"), el cuál asigna valores binarios a cada píxel y envía los
datos digitales para su codificación en video y posterior almacenamiento ó envío a
través de Internet.
2. OpenCV
OpenCV (Open Source Computer Vision Library) es un marco de trabajo de código
abierto y software de aprendizaje desarrollado por Intel. Fue construido para
proporcionar una infraestructura común para aplicaciones de visión por computador y
para acelerar el uso de la percepción de la máquina en los productos comerciales. Al ser
un producto con licencia libre, OpenCV hace que sea fácil para las empresas a utilizar y
modificar el código.
La biblioteca cuenta con más de 2.500 algoritmos optimizados, que incluye un amplio
conjunto para el aprendizaje. Estos algoritmos se pueden utilizar para detectar y
reconocer rostros, identificar objetos, clasificar las acciones humanas en los videos,
rastrear los movimientos de cámara, seguimiento de objetos en movimiento, extraer
modelos 3D de objetos, encontrar imágenes similares a partir de una base de datos de
5
Técnicas digitales III –Problema de ingeniería-
imágenes, eliminar los ojos rojos de las imágenes tomadas con flash, siguir los
movimientos del ojo, reconocer paisajes, etc
OpenCV cuenta con muchos usuarios y el número estimado de descargas superiores a
7 millones. La biblioteca se utiliza ampliamente en las empresas, grupos de
investigación y los organismos gubernamentales.
Empresas bien establecidas como Google, Yahoo, Microsoft, Intel, IBM, Sony, Honda,
Toyota, hacen un amplio uso de OpenCV.
Aplicaciones desplegadas de OpenCV abarcan desde streetview, detección de
intrusiones en video de vigilancia en Israel, los equipos de vigilancia de minas en China,
ayudando a los robots navegar y recoger objetos, la detección en la piscina de
accidentes por ahogamiento en Europa, corriendo arte interactivo en España y Nueva
York, comprobando pistas de escombros en Turquía, la inspección de las etiquetas de
los productos en las fábricas de todo el mundo ,etc.
Bibliotecas de software
Una biblioteca de software consiste en un conjunto de funciones descritas en un
lenguaje de programación en específico que permiten agilizar el trabajo y brindar una
interface de desarrollo al programador o API ―Application Program Interface en el tema
de visión por computadora existen distintas de estas bibliotecas, en nuestro grupo de
investigación la biblioteca usada es OpenCV .
OpenCV es un conjunto de bibliotecas de código abierto u Open Source desarrolladas
en un principio por Intel. Están desarrolladas en lenguaje C, con puertos a C++, phyton y
octave. Además, se pueden ejecutar desde diversos sistemas operativos como
6
Técnicas digitales III –Problema de ingeniería-
Windows, GNU/Linux y Mac OS X y desde diversas plataformas de hardware basadas
en procesadores x86, ARM y PowerPC.
Estas bibliotecas ofrecen código diseñado eficientemente, orientado a aplicaciones
capaces de ejecutarse en tiempo real en procesadores modernos. Estas bibliotecas
tienen como objetivo proveer las funciones más usadas en Visión por computadora y
tiene más de 500 funciones implementadas. Se usan ampliamente en Vigilancia,
imágenes médicas, inspección industrial, interfaces de usuario, calibración de cámaras y
recientemente se han usado estas bibliotecas en imágenes aéreas y mapas de calles,
por ejemplo en la herramienta Google’s Street View. Se hace uso de la calibración de
cámara y de funciones de OpenCV para hacer el proceso de stitching, que consiste en
combinar múltiples imágenes para producir una imagen panorámica o una imagen de
alta resolución.
3. Introducción a Visual Studio Express
Visual Studio es un conjunto completo de herramientas de desarrollo para la generación
de aplicaciones web ASP.NET, Servicios Web XML, aplicaciones de escritorio y
aplicaciones móviles. Visual Basic, Visual C# y Visual C++ utilizan todos el mismo
entorno de desarrollo integrado (IDE), que habilita el uso compartido de herramientas y
facilita la creación de soluciones en varios lenguajes. Asimismo, dichos lenguajes
utilizan las funciones de .NET Framework, las cuales ofrecen acceso a tecnologías clave
para simplificar el desarrollo de aplicaciones web ASP y Servicios Web XML.
4. ¿Qué es una imagen?:
Aunque una imagen es la reproducción de la figura de un objeto por la combinación de
los rayos de luz que inciden en el, dentro de un ordenador una imagen no es más que
una gran secuencia de ceros y unos que podemos leer y modificar a nuestro antojo.
Como ya sabemos, el tamaño de las imágenes se mide en píxeles, que es precisamente
la superficie homogénea más pequeña de las que componen una imagen, que se define
por su brillo y color. Si cambiamos la resolución de nuestra pantalla veremos la misma
imagen (de 600×400 píxeles) más pequeña o más grande.
7
Técnicas digitales III –Problema de ingeniería-
Cada píxel está además definido por su color o brillo. Las imágenes en blanco y negro
son las más básicas, pudiendo tomar sus píxeles valores entre 0 (completamente negro)
y 255 (completamente blanco). Sin embargo las imágenes de color contienen tres
canales de colores distintos (los famosos RGB (R : rojo, G : verde, B : Azul). Cada canal
puede tomar un valor entre 0 y 255, por ejemplo un R = 255, G = 0, y B = 0 será un píxel
completamente rojo. Si los tres valores son 255 el píxel será blanco, y si los tres valen 0
el píxel será negro. Existe además el sistema HSB (Hue, Saturation, Brightness (Matiz,
Saturación, Luminosidad)), con el que también se puede crear cualquier color, y que
tiene transformación directa a su representación en el sistema RGB:
Por tanto, ¿cuántos valores hay en una imagen?: el cálculo es sencillo: altura x anchura
x canales. Para recorrer una imagen en OpenCV se va de izquierda a derecha, y de
arriba a abajo. Teniendo en cuenta además que los canales están ordenados en BGR
(azul, verde y rojo), si quisiésemos acceder al valor rojo del píxel número 40 de la fila 24
tendríamos que acceder al dato: anchura_fila*23 + numero_canales*39 + 2, donde
anchura_fila será la anchura de la imagen multiplicada por el número de canales. Está
8
Técnicas digitales III –Problema de ingeniería-
es la única forma de recorrer imágenes, y se implementa con bucles anidados como
veremos posteriormente.
Estimación de primer plano
En visión por computador es común tener el caso del análisis de un video proveniente
de una cámara fija en la que los pixeles de la imagen pueden ser separados en dos
clases: el fondo y el primer plano.
La primera clase correspondería a el fondo de la imagen que corresponde a los objetos
estáticos en la imagen o objetos que presentan un movimiento constante, por ejemplo
en una escena de un bosque los arboles harían parte del fondo, sus troncos totalmente
fijos y sus hojas que son movidas por el viento, o en una escena del interior de un centro
comercial, si una cámara ve hacia unas escaleras eléctricas, estas harían parte del
fondo junto con el piso y las barandas.
La segunda clase corresponde al primer plano, que son pixeles distintos al fondo de la
escena que presenten un movimiento deseable a analizar.
Del fondo y el primer plano es posible crear una imagen lógica, se acostumbra asignar
un uno lógico al primer plano y un cero lógico al fondo. Existen técnicas distintas para
obtener esta máscara de primer plano, las más básicas consisten en encontrar una
imagen que corresponde al fondo, realizar una resta en valor absoluto entre esta imagen
de fondo y el cuadro de video y umbralizar el resultado.
Este tipo de algoritmo de obtención del primer plano mediante una imagen de fondo
tiene la desventaja de solo poder modelar un fondo de la escena, por ejemplo en la
escena del bosque, los troncos de los arboles serian bien modelados, pero las hojas
movidas por el viento no, además se generan falsos positivos de primer plano con los
cambios bruscos de iluminación o con las sombras de los objetos móviles.
Se puede llegar a un modelo más complejo que el anterior usando imágenes creadas a
partir de la media, de la varianza y la covarianza por pixel de las imágenes del video.
9
Técnicas digitales III –Problema de ingeniería-
5. Primer programa con OpenCV:
Una vez que lo hemos instalado podemos comenzar a crear nuestra primera aplicación,
en opencv (una librería de computación visual) trabajaremos la mayoría del tiempo con
imágenes y videos por lo cual lo primero que veremos será como mostrar imágenes y
videos en nuestros proyectos.
Mostrar una imagen en OpenCV
Lo primero es crear un proyecto opencv con la plantilla que previamente creamos.
#include <opencv2\opencv.hpp>
using namespace cv;
int main( int argc, char** argv ) {
//crea una ventana llamada ‘ventana’ de tamaño automático o ajustable
namedWindow( "ventana", CV_WINDOW_AUTOSIZE);
//Espera a que se presione una tecla
10
Técnicas digitales III –Problema de ingeniería-
waitKey(0);
//destruye la ventana
destroyWindow( "ventana" );
}
Con este código creamos una ventana vacía. Lo siguiente que debemos hacer es cargar
la imagen y mostrarla en la pantalla que acabamos de crear, algunos formatos admitidos
son: jpg, png, tiff.
#include <opencv2\opencv.hpp>
using namespace cv;
int main( int argc, char** argv ) {
namedWindow( "ventana", CV_WINDOW_AUTOSIZE);
//carga la imagen indicada y la devuelve en una matriz
Mat m1 = imread("imagen.jpeg");
//Muestra la imagen la ventana indicada
imshow("ventana", m1);
waitKey(0);
destroyWindow( "ventana" );
}
11
Técnicas digitales III –Problema de ingeniería-
Con esto tenemos nuestro primer programa listo, el cual muestra una imagen en una
ventana, debemos presionar una tecla para salir, en nuestro caso la imagen debe estar
en el proyecto si se encuentra fuera debemos indicar la ruta completa.
6. ¿Cómo detectar un objeto de determinado color?:
Para detectar un objeto de determinado color necesitaremos detectar todos los píxeles
que lo componen. Para ello iremos buscando en todos los píxeles de la imagen,
calculando si son o no del color deseado. ¿Como sabemos si por ejemplo es rojo?. En
primer lugar tenemos que ver qué datos característicos tiene dicho color. En este caso
es sencillo, su dato más característico será que el canal con mayor valor será el del rojo.
También deberíamos tener en cuenta que los valores de los demás canales no deberían
ser muy altos, por lo menos no lo suficiente como para acercarse al valor del canal del
rojo, ya que estos valores podrían corresponder a colores como el morado o el naranja.
Con un color que no sea de los tres básicos la cosa se complica un poco; en este caso
lo mejor es abrir la imagen con un editor de imágenes (el Paint por ejemplo), y mirar que
valores RGB tienen los píxeles del color deseado. Así podremos sacar las
características que nos determinarán dicho color.
Una vez tengamos todos los píxeles del objeto podemos hacer varias cosas: podríamos
cambiar de color los píxeles y mostrar la imagen resultante por pantalla para ver si ha
detectado bien el objeto.
Podemos además llevar un contador de cuantos píxeles llevamos, y una suma de sus
posiciones, lo que nos serviría para calcular lo que sería el punto medio de nuestro
objeto. Estás coordenadas del punto medio serán bastante precisas si contamos con
una gran cantidad de píxeles del objeto, y ésto será de gran utilidad para emplazar dicho
objeto con respecto a un robot por ejemplo.
7. Dibujar formas y texto :
12
Técnicas digitales III –Problema de ingeniería-
Opencv posee varias funciones con las que podemos crear figuras geométricas o
formas más complejas, dibujar textos sobre las imágenes, vamos a ver cuáles son estas
funciones y cómo usarlas en nuestros proyectos con opencv.
Lo primero que necesitamos es donde dibujar por lo que crearemos una imagen (Mat)
vacía sobre la cual representaremos nuestros dibujos, el siguiente código crea un objeto
de la clase Mat que representa nuestra imagen en opencv de 800x600 pixeles, de 3
canales BGR, e inicializada en 0 o sea color negro.
Mat img(rows, cols, CV_8UC3, Scalar::all(0));
rows: cantidad de filas o pixeles de alto que tendrá nuestra imagen 600.
cols: cantidad de columnas o pixeles de ancho de nuestra imagen 800.
CV_8UC3: puede ser alguno de los valores mencionados abajo seguido de C3 para tres
canales, o C1, C2, C4 para 1, 2, 4, canales respectivamente:
CV_8U - 8-bit unsigned integers ( 0..255 )
CV_8S - 8-bit signed integers ( -128..127 )
CV_16U - 16-bit unsigned integers ( 0..65535 )
CV_16S - 16-bit signed integers ( -32768..32767 )
CV_32S - 32-bit signed integers ( -2147483648..2147483647 )
CV_32F - 32-bit floating-point numbers ( -FLT_MAX..FLT_MAX, INF, NAN )
CV_64F - 64-bit floating-point numbers ( -DBL_MAX..DBL_MAX, INF, NAN )
Scalar::all(0): Scalar representa el color de la imagen en formato BGR, podemos
establecer un color diferente estableciendo los diferentes canales de este modo:
13
Técnicas digitales III –Problema de ingeniería-
Scalar(azul, verde, rojo), podemos usar el macro CV_RGB(rojo, verde, azul) si nos
resulta más cómodo.
Ahora podemos comenzar a dibujar, la primera función que veremos es circle la cual
nos sirve para dibujar un circulo, es muy sencilla veamos cómo se usa:
circle(img, Point(cols / 2, rows / 2), 250, Scalar(255,0,0), 3);
Para usar esta función debemos indicar en qué imagen vamos a dibujar, el punto donde
se ubicara el centro del circulo seguido del radio y el color, existen otros parámetros de
esta función pero son opcionales, en este caso el ultimo 3 indica el grosor de la línea de
dibujo.
Además existen la funciones line, rectangle, entre otras cuyo uso es muy similar.
Otra función interesante de dibujo es la función putText la cual dibuja en texto, para la
misma debemos especificar la imagen donde vamos a dibujar, el texto a representar, el
punto donde será dibujado el texto (la parte izquierda inferior), el tipo de letra , el
tamaño, color, y grosor del texto.
putText(img, "OpenCV 2", Point(180,320), FONT_HERSHEY_SCRIPT_COMPLEX, 3,CV_RGB(125,12,145), 2);
Código de ejmplo:
#include <opencv2\opencv.hpp>
using namespace cv;
void main()
{
14
Técnicas digitales III –Problema de ingeniería-
int rows = 600;
int cols = 800;
int rec = 150;
//crear una imagen de 800x600 pixeles
//canal BGR de tipo CV_8U( valores de 0 a 255)
//inicializamos a 0 (color negro)
Mat img(rows, cols, CV_8UC3, Scalar::all(0));
//dibuja un circulo en el centro de la imagen de un radio de 250
circle(img, Point(cols / 2, rows / 2), 250, Scalar(255,0,0), 3);
//dibuja una linea
line(img, Point(), Point(cols, rows), CV_RGB(255,0,0), 2, CV_AA);
//dibuja un rectangulo
rectangle(img, Point(rec, rec), Point(cols - rec, rows - rec),CV_RGB(0,255,255));
//dibuja el texto Opencv 2
putText(img, "OpenCV 2", Point(180,320), FONT_HERSHEY_SCRIPT_COMPLEX, 3, CV_RGB(125,12,145), 2);
imshow("Drawing", img);
waitKey(0);
}
15
Técnicas digitales III –Problema de ingeniería-
8. Ejemplo de funciones :
Operaciones morfológicas : “Erode” y “Dilate”
Visualmente realizan lo siguiente en la imagen
Erode
erode(img, dst, krl);
A medida que se explora la imagen, se calcula el valor mínimo de píxeles solapado y se
reemplaza la imagen en el punto de anclaje con ese valor mínimo.
Dilate
dilate(img,
dst, krl);
erode
Como
se
puede deducir, esta operación hace la maximización de las regiones luminosas en una
imagen para hacerla "crecer" (por lo tanto el nombre de dilatación). :
16
Técnicas digitales III –Problema de ingeniería-
9. Codigo fuente de nuestro proyecto:
#include
#include
#include
#include
#include
#include
<sstream>
<string>
<iostream>
<opencv\highgui.h>
<opencv\cv.h>
<windows.h>
int cont = 0;
int bandera = 0;
using namespace cv;
//inicializo valores de filtrado min and max HSV .
//los modificamos usando las barras de seguimiento
int H_MIN = 0;
int H_MAX = 256;
int S_MIN = 0;
int S_MAX = 256;
int V_MIN = 0;
int V_MAX = 256;
//defino por defecto ancho y altura
const int FRAME_WIDTH = 640;
const int FRAME_HEIGHT = 480;
//numero maximo de objetos a ser detectados en la pantalla
const int MAX_NUM_OBJECTS=50;
//maximo y minimo del objecto
const int MIN_OBJECT_AREA = 20*20;
const int MAX_OBJECT_AREA = FRAME_HEIGHT*FRAME_WIDTH/1.5;
//nombres de las pantallas
const string windowName = " Imagen Original";
const string windowName1 = "Imagen HSV ";
const string windowName2 = "Imagen Objeto filtrado";
const string windowName3 = "Despues de Operaciones Morfologicas ";
const string trackbarWindowName = "Barras de seguimiento";
void on_trackbar( int, void* ){
}
string intToString(int number){
std::stringstream ss;
17
Técnicas digitales III –Problema de ingenieríass << number;
return ss.str();
}
void createTrackbars(){
//crea la pantalla de barras de seguimiento
namedWindow(trackbarWindowName,0);
//Almaceno memoria
char TrackbarName[50];
sprintf( TrackbarName, "H_MIN", H_MIN);
sprintf( TrackbarName, "H_MAX", H_MAX);
sprintf( TrackbarName, "S_MIN", S_MIN);
sprintf( TrackbarName, "S_MAX", S_MAX);
sprintf( TrackbarName, "V_MIN", V_MIN);
sprintf( TrackbarName, "V_MAX", V_MAX);
//creo barras e inserto en pantalla
//con 3 parametros: la direccion de la variable que cambia cuando muevo la barra (ejemplo
H_LOW),
//el valor maximo que se puede lograr (ejemplo H_HIGH),
//y la funcion que se llama al mover la barra ( on_trackbar)
//
---->
---->
---->
createTrackbar( "H_MIN", trackbarWindowName, &H_MIN, H_MAX, on_trackbar );
createTrackbar( "H_MAX", trackbarWindowName, &H_MAX, H_MAX, on_trackbar );
createTrackbar( "S_MIN", trackbarWindowName, &S_MIN, S_MAX, on_trackbar );
createTrackbar( "S_MAX", trackbarWindowName, &S_MAX, S_MAX, on_trackbar );
createTrackbar( "V_MIN", trackbarWindowName, &V_MIN, V_MAX, on_trackbar );
createTrackbar( "V_MAX", trackbarWindowName, &V_MAX, V_MAX, on_trackbar );
}
void drawObject(int x, int y,Mat &frame){
//uso funciones de openCV para dibujar la mira
//sobre la imagen original
//se usa 'if' y 'else' para prevenir errores de memoria
// (ejemplo (-25,-25) no existe en pantalla)
circle(frame,Point(x,y),20,Scalar(0,255,0),2);
if(y-25>0)
line(frame,Point(x,y),Point(x,y-25),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(x,0),Scalar(0,255,0),2);
if(y+25<FRAME_HEIGHT)
line(frame,Point(x,y),Point(x,y+25),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(x,FRAME_HEIGHT),Scalar(0,255,0),2);
if(x-25>0)
line(frame,Point(x,y),Point(x-25,y),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(0,y),Scalar(0,255,0),2);
if(x+25<FRAME_WIDTH)
line(frame,Point(x,y),Point(x+25,y),Scalar(0,255,0),2);
else line(frame,Point(x,y),Point(FRAME_WIDTH,y),Scalar(0,255,0),2);
putText(frame,intToString(x)+","+intToString(y),Point(x,y+30),1,1,Scalar(0,255,0),2);
//Codigo para conteo que pasen por la linea
if(x>300 && x<340 && bandera == 0){
cont++;
18
Técnicas digitales III –Problema de ingenieríabandera = 1;}
if(x<300)
bandera = 0;
}
void morphOps(Mat &thresh){
//creo estructura
para "dilatar" y "erosionar" la imagen.
Mat erodeElement = getStructuringElement( MORPH_RECT,Size(3,3));
//dilata para hacerlo visible
Mat dilateElement = getStructuringElement( MORPH_RECT,Size(8,8));
erode(thresh,thresh,erodeElement);
erode(thresh,thresh,erodeElement);
dilate(thresh,thresh,dilateElement);
dilate(thresh,thresh,dilateElement);
}
void trackFilteredObject(int &x, int &y, Mat threshold, Mat &cameraFeed){
Mat temp;
threshold.copyTo(temp);
//vectores necesitados para la salida de " findContours"
vector< vector<Point> > contours;
vector<Vec4i> hierarchy;
//Halla contornos de la imagen filtrada usando la funcion de openCV "findContours"
findContours(temp,contours,hierarchy,CV_RETR_CCOMP,CV_CHAIN_APPROX_SIMPLE );
//para hallar nuestro objeto filtrado
double refArea = 0;
bool objectFound = false;
if (hierarchy.size() > 0) {
int numObjects = hierarchy.size();
//si el numero de objetos es mayor que MAX_NUM_OBJECTS tenemos mucho ruido
if(numObjects<MAX_NUM_OBJECTS){
for (int index = 0; index >= 0; index = hierarchy[index][0]) {
Moments moment = moments((cv::Mat)contours[index]);
double area = moment.m00;
//si el area es menor que 20 x20 px es probable que sea ruido
//si el area es igual que
3/2 del tamaño de la imagen, probablemente
sea mal filtrado
//nosotros queremos el objeto con mayor area asi que nos aseguramos un
area de referencia
//que interactua y se compara con el area de la proxima iteracion
if(area>MIN_OBJECT_AREA && area<MAX_OBJECT_AREA && area>refArea){
x = moment.m10/area;
y = moment.m01/area;
objectFound = true;
refArea = area;
}else objectFound = false;
19
Técnicas digitales III –Problema de ingeniería-
}
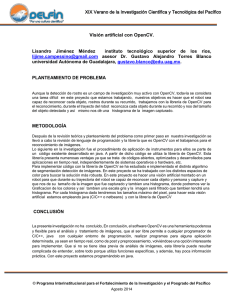
//dejo saber al usuario que se encontro el objeto
putText(cameraFeed,"cantidad de objetos
="+intToString(cont),Point(10,450),1,1,Scalar(0,0,255),2);
line(cameraFeed,Point(FRAME_WIDTH/2,0),Point(FRAME_WIDTH/2,480),Scalar(0,255,0),2);
if(objectFound == true){
putText(cameraFeed,"objeto trackeado",Point(0,50),2,1,Scalar(0,255,0),2);
//dibujo ubicacion de objeto en pantalla
drawObject(x,y,cameraFeed);}
}else putText(cameraFeed,"MUCHO RUIDO...AJUSTE EL
FILTRO",Point(0,50),1,2,Scalar(0,0,255),2);
}
}
int main(int argc, char* argv[])
{
//variables buleanas para diferentes usos
bool trackObjects = true;
bool useMorphOps = true;
//Matriz para guardar cada imagen que proviene de la webcam
Mat cameraFeed;
//Matriz para guardar imagen HSV
Mat HSV;
//Matriz para guardar imagen threshold
Mat threshold;
//coordenadas x e y para ubicacion de objeto
int x=0, y=0;
//crea barras deslizantes para filtraje HSV
createTrackbars();
//objeto de captura de video, para la alimentacion de webcam
VideoCapture capture;
//abrir el objeto de captura en ubicacion 0 (ubicacion por default de webcam)
capture.open(0);
//setea ancho y alto de la trama de captura
capture.set(CV_CAP_PROP_FRAME_WIDTH,FRAME_WIDTH);
capture.set(CV_CAP_PROP_FRAME_HEIGHT,FRAME_HEIGHT);
//lazo infinito donde la alimentacion de webcam se copia a la matriz cameraFeed
//all of our operations will be performed within this loop
while(1){
//guarda imagen en la matriz
capture.read(cameraFeed);
//convierte la trama de BGR a HSV
cvtColor(cameraFeed,HSV,COLOR_BGR2HSV);
//filtrado de la imagen HSV entre los valores y guarda la imagen filtrada en la matriz
threshold
inRange(HSV,Scalar(H_MIN,S_MIN,V_MIN),Scalar(H_MAX,S_MAX,V_MAX),threshold);
//realiza operaciones morfologicas sobre la imagen filtradapara eliminar ruido y
enfatizar el objeto filtrado
if(useMorphOps)
morphOps(threshold);
//pasa la trama filtrada a nuestra funcion de seguimiento de objetos
//esta funcion retornara las coordenadas x e y de nuestro objeto trackeado
if(trackObjects)
trackFilteredObject(x,y,threshold,cameraFeed);
//displayar pantallas
20
Técnicas digitales III –Problema de ingenieríaimshow(windowName2,threshold);
imshow(windowName,cameraFeed);
imshow(windowName1,HSV);
waitKey(30);
}
return 0;
}
Captura de pantalla de nuestro proyecto funcionando:
21
Técnicas digitales III –Problema de ingeniería-
10.Conclusión:
Con éstas funciones de OpenCV y muchas mas (existen miles disponibles), mas las
creadas por el usuario, podemos trabajar la imagen de video original, y así implementar
sistemas de reconocimiento de figuras o cuerpos, de distintos maneras, por color,
forma, etc.
Esto lo aplicamos en control de tránsito, tele vigilancia, producción industrial,
robótica,etc.
La selección de hardware de la plataforma permite uno o más configuraciones, como ser
velocidad en cuadros por segundo de cámaras, pc utilizada y demás, que serán
elegidas de acuerdo a las prestaciones que se requieran y su presupuesto.
Con éste trabajo se pretendió incursionar en el ámbito de digitalización y procesamiento
de imagen en tiempo real, lo cual tiene gran auge y aplicaciones.
Anexos:
1) Video de ensayos de nuestro sistema, montado en una maqueta, simulando la
planta de envasado (ver archivo en DVD provisto)
2) Algunas consideraciones prácticas de iluminación y alarmas.
3) Instalación y configuración del software
22
Técnicas digitales III –Problema de ingeniería-
Anexo 2: Algunas consideraciones prácticas de iluminación y alarmas
El ambiente de la línea de producción debe ser tal que nuestro sistema se encuentre en
un ambiente preferentemente cerrado con una iluminación dedicada y constante, para
poder lograr un preciso filtrado del objeto, y seguimiento del mismo.
La falla de iluminación puede producir errores en la medición, por esto, además de
construir un ambiente propicio, en nuestro sistema pueden adicionarse funciones de
alarmas.
Se pueden programar múltiples alarmas, por parada de producción y falencias en la
línea de producción, iluminación, etc generando un registro histórico y señales en la
pantalla del panel de control.
Un cartel de aviso en el sistema, lo programamos en la línea de código:
putText(cameraFeed,"MUCHO RUIDO...AJUSTE EL FILTRO",Point(0,50),1,2,Scalar(0,0,255),2);
23
Técnicas digitales III –Problema de ingeniería-
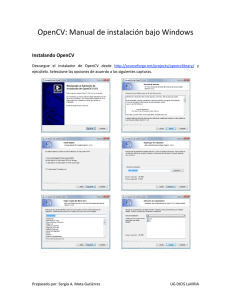
Anexo 3: Instalación y configuración del software
Instalar OpenCV 2.4.9 en Windows 7/x86/x64
Procedimiento:
1.- Descargar OpenCV 2.4.9 desde el siguiente link:
https://sourceforge.net/projects/opencvlibrary/files/opencv-win/2.4.9/opencv-2.4.9.exe/download
2.- Dar doble clic en el ejecutable descargado y extraer OpenCV en el directorio raíz:
“C:\” (ESTO ES IMPORTANTE)
3.- Después de terminada la extracción se creará una carpeta llamada “opencv” en “C:\”
que contendrá las librerías de OpenCV 2.4.9.
24
Técnicas digitales III –Problema de ingeniería-
4.- Abrir el Panel de Control -> Sistema y seguridad -> Sistema
5.- En la parte izquierda dar clic en “Configuración avanzada del sistema”.
6.- Dar clic en “Variables de entorno”. Se
abrirá una nueva ventana.
7.- Ubicar la variable “Path” en las
“Variables del sistema”
8.- Dar clic en “Editar”
25
Técnicas digitales III –Problema de ingeniería-
9.- Las variables del entorno se separan por puntos y coma. Como se va agregar una
nueva variable se debe situar al final de la cadena e ingresar “;”, después agregar la
variable según se indica en el siguiente paso.
10.- Ingresar la dirección de donde se encuentren ubicadas las bibliotecas dinámicas
según la versión:
•
para compilar en x86, Visual 2010 agregar: C:\opencv\build\x86\vc10\bin;
•
•
•
para compilar en x86, Visual 2012 agregar: C:\opencv\build\x86\vc11\bin;
para compilar en x64, Visual 2010 agregar: C:\opencv\build\x64\vc10\bin;
para compilar en x64, Visual 2012 agregar: C:\opencv\build\x64\vc11\bin;
11.- En nuestro caso utilizaremos el Visual Studio Express compilando en x64.
11.- Dar clic en aceptar en las ventanas abiertas y reiniciar la computadora.
26
Técnicas digitales III –Problema de ingeniería-
Configurar un proyecto de OpenCV 2.4.9
en Visual Studio Express.
Procedimiento:
En los siguientes pasos se muestra como configurar un proyecto de Visual Studio
Express con OpenCV 2.4.9.
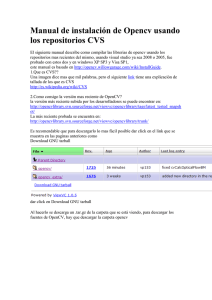
1.- Abrir el Visual Studio Express y crear un nuevo proyecto de “Aplicación de Consola
Win32”. Colocar nombre del proyecto. Aceptar.
Figura 1.- Nueva aplicación de consola en Visual Studio Express
27
Técnicas digitales III –Problema de ingeniería-
2.- Teclear Alt + F7 para abrir las propiedades de proyecto (figura 2).
Figura 2.- Menu -> Proyecto -> Propiedades del proyecto
Tener en cuenta seleccionar “Debug Win32” (B) antes de seleccionar “proyecto” en el
menú, debido a que puede desplegarse otra ventana con opciones diferentes o faltantes
en la opción “propiedades”. Lo mismo es para el “Release Win 32” del pto 7.
28
Técnicas digitales III –Problema de ingeniería-
3.- En “Propiedades de configuración (Configuracion
Propiedades)” -> “C/C++”, > “General” seleccionar “Directorios de inclusión adicionales (Additional Include Directories)”
y escribir C:\opencv\build\include como se muestra en la figura 3.
Figura 3.- Directorios de inclusión adicionales
29
Técnicas digitales III –Problema de ingeniería-
4.En “Propiedades
de
configuración”
-> “Vinculador
(Linker)”
>“General”, seleccionar“Directorios de bibliotecas adicionales (Additional Library
Directories)” y escribir C:\opencv\build\x64\vc10\lib si se desea compilar y se configuro en
x64 o C:\opencv\build\x86\vc10\lib si fue en x86.
Figura 4.- Directorios de bibliotecas adicionales x86 en Visual 2010
30
Técnicas digitales III –Problema de ingeniería-
5.-En “Propiedades
de
configuración”
-> “Vinculador
(Linker)”
->“Entrada
(Input)”, seleccionar “Dependencias adicionales (Additional Dependencies)”. Seleccionar la
flecha que apunta hacia abajo y después “<Editar…>” (figura 5).
Figura 5.- Dependencias adicionales
6.- En la ventana que se abre escribir las siguientes bibliotecas:
opencv_core249d.lib
opencv_calib3d249d.lib
opencv_imgproc249d.lib
opencv_objdetect249d.lib
opencv_highgui249d.lib
opencv_contrib249d.lib
opencv_ml249d.lib
opencv_legacy249d.lib
opencv_video249d.lib
opencv_flann249d.lib
opencv_features2d249d.lib
31
Técnicas digitales III –Problema de ingeniería-
7. -Dar clic en OK y cambiar la configuración de “Active(Debug)” a “Release” aceptando el
mensaje que a continuación aparece (Figura 6).
Figura 6.- Cambiar configuración de Active(Debug) a Release. Igual que en el punto 2 pero con “Release”
8.- Como en el paso 5 en “Propiedades de configuración” -> “Vinculador (Linker)” >“Entrada (Input)”, seleccionar “Dependencias adicionales (Additional Dependencies)”.
Técnicas digitales III –Problema de ingeniería-
Seleccionar la flecha que apunta hacia abajo y después “<Editar…>” y agregar las siguientes bibliotecas:
opencv_core249.lib
opencv_imgproc249.lib
opencv_highgui249.lib
opencv_ml249.lib
opencv_video249.lib
opencv_features2d249.lib
opencv_calib3d249.lib
opencv_objdetect249.lib
opencv_contrib249.lib
opencv_legacy249.lib
opencv_flann249.lib
9.- Dar clic en OK y después Aceptar.
10.- Escribir el siguiente ejemplo para cargar y mostrar una imagen con OpenCV:
#include "stdafx.h"
#include "opencv2/opencv.hpp"
int main()
{
IplImage* img = cvLoadImage("C:/Tulum.jpg",1
cvWaitKey();
return 0;
}
33
cvShowImage("Tulum",img);
Técnicas digitales III –Problema de ingeniería-
Crear programa C++
1.- En la pestaña de “explorador de soluciones”, en “archivos de código fuente”
apretamos botón derecho del mouse, “agregar” y luego según corresponda “nuevo
elemento” o “elemento ya existente”4
34
Técnicas digitales III –Problema de ingeniería-
2.- Nótese que:
3.- En la pestaña de “administrador de propiedades”, sobre “debug Win32”, botón derecho
del mouse, “agregar hoja4”
35
Técnicas digitales III –Problema de ingeniería-
4.- Buscar en tu PC el Archivo (anexado en el cd):
5.- En la misma pestaña del punto 2 elegir ahora “Release Win32”, botón derecho del
mouse, “agregar hoja4”
6.- Buscar en tu PC el Archivo (anexado en el cd):
36
Técnicas digitales III –Problema de ingeniería-
Listo, ya está todo listo para programar y simular.
NOTA: Todo esto llevo tiempo de investigación, puesto que casi en ningún sitio aclara
todos los pasos anteriormente nombrados. Al igual que la necesidad de los dos archivos
“OPENCV_DEBUG” Y “OPENCV_RELEASE”, los cuales fueron una de las principales
causas de retraso al proyecto. Ambos archivos son adjuntados en el CD.
NOTA2: Con respecto a la instalación del Visual Studio Express, es normal como
cualquier otro programa por lo cual no vimos la necesidad de explicarlo.
37