Informe - Escuela de Ingeniería Eléctrica
Anuncio

Universidad de Costa Rica
Facultad de Ingeniería
Escuela de Ingeniería Eléctrica
IE – 0502 Proyecto Eléctrico
Diseño e implementación de un dispositivo transmisor y receptor para la comunicación de dos computadoras por medio de radiofrecuencia por
modulación FSK (Segunda Parte)
Por:
Manuel de Jesús Campos Salazar
Ciudad Universitaria Rodrigo Facio
Julio del 2007
Diseño e implementación de un dispositivo transmisor y receptor para la comunicación de dos computadoras por medio de radiofrecuencia por
modulación FSK (Segunda Parte)
Por:
Manuel de Jesús Campos Salazar
Sometido a la Escuela de Ingeniería Eléctrica
de la Facultad de Ingeniería
de la Universidad de Costa Rica
como requisito parcial para optar por el grado de:
BACHILLER EN INGENIERÍA ELÉCTRICA
Aprobado por el Tribunal:
_________________________________
Ing. Peter Zeledón Méndez
Profesor Guía
_________________________________
Ing. Víctor H. Chacón Prendas, MSc
Profesor lector
_________________________________
Ing. Lucía Acuña Avendaño
Profesora lectora
ii
DEDICATORIA
A mis padres y mi hermano por toda la ayuda brindada a lo largo de todos estos años.
RECONOCIMIENTOS
Un agradecimiento muy especial a don Gerardo Herrera Herrera y a Ana Catalina Villalobos Gonzáles del Laboratorio de Electrónica y Circuitos Impresos del ICE por toda la ayuda brindada en la realización de este proyecto.
ÍNDICE GENERAL
ÍNDICE DE FIGURAS..................................................................................vii
ÍNDICE DE TABLAS......................................................................................x
NOMENCLATURA........................................................................................xi
RESUMEN.....................................................................................................xiv
CAPÍTULO 1: Introducción ...........................................................................1
1.1
Objetivos.................................................................................................................2
Objetivo general..............................................................................................2
Objetivos específicos ......................................................................................2
Metodología ............................................................................................................3
1.1.1
1.1.2
1.2
CAPÍTULO 2: Desarrollo teórico ..................................................................5
2.1
Modulación .............................................................................................................5
Modulación FSK.............................................................................................8
El puerto RS-232 ..................................................................................................11
2.2.1
Hardware.......................................................................................................11
2.2.2
Protocolos de Control de Información..........................................................15
Moduladores .........................................................................................................17
2.3.1
Osciladores....................................................................................................17
2.3.2
Osciladores de cristal ....................................................................................19
2.3.3
Moduladores basados en PLL, VCO y cristales osciladores ........................22
Receptores FSK ....................................................................................................23
2.4.1
Receptores super-heterodinos .......................................................................23
Antenas .................................................................................................................25
2.5.1
Aspectos generales........................................................................................25
2.5.2
Parámetros de antenas...................................................................................26
2.5.3
Tipos de antenas............................................................................................32
2.5.4
Antenas en recepción ....................................................................................32
2.1.1
2.2
2.3
2.4
2.5
CAPÍTULO 3: Diseño del sistema de comunicación ..................................35
3.1
3.2
Diagrama General del Sistema de Comunicación ................................................37
Diseño de los Moduladores...................................................................................41
3.2.1
Método de Diseño.........................................................................................43
3.3
Diseño de los demoduladores ...............................................................................46
Método de Diseño .........................................................................................46
3.4
Simulación FSK....................................................................................................50
3.5
Investigación referente a equipo de radiofrecuencia ............................................55
3.5.1
Sintetizador de frecuencias ...........................................................................56
3.5.2
MAX1471 .....................................................................................................62
3.5.3
RTFQ1 y RRFQ1..........................................................................................63
3.5.4
Wmod9k6......................................................................................................65
3.3.1
CAPÍTULO 4: Construcción de los circuitos impresos .............................67
4.1
4.2
Diseño del circuito impreso ..................................................................................67
Construcción de los circuitos y montaje de los componentes ..............................76
CAPÍTULO 5: Pruebas de Laboratorio ......................................................79
5.1
5.2
Modulador.............................................................................................................79
Demodulador ........................................................................................................82
CAPÍTULO 6: Conclusiones y recomendaciones .......................................90
BIBLIOGRAFÍA............................................................................................92
APÉNDICES...................................................................................................94
ANEXOS .........................................................................................................98
ÍNDICE DE FIGURAS
Figura 2.1 Esquema general de modulación. Tomado de [5] .............................................6
Figura 2.2 Formas de onda en el dominio del tiempo para distintos tipos de modulación.
Tomado de [7].....................................................................................................................7
Figura 2.3 Señal FSK en el dominio del tiempo. Tomado de [5] .......................................8
Figura 2.4 Parámetros de una señal FSK. Tomado de [5] .................................................9
Figura 2.5 Señal sincrónica vs señal asincrónica. Tomado de [5]....................................10
Figura 2.6 Representación de un uno lógico y un cero lógico en el estándar RS232.
Adaptado de [6] ................................................................................................................12
Figura 2.7 Asignación de pines del RS-232. Tomado de [6]............................................13
Figura 2.8 Conexión Null Modem sin Handshaking. Tomado de [5] ..............................15
Figura 2.9 Esquema general de un oscilador. Tomado de [5] ..........................................18
Figura 2.10 Circuito equivalente del cristal de cuarzo. Tomado de [13]..........................19
Figura 2.11Curva de impedancia del cristal. Tomado de [5]............................................19
Figura 2.12 Estructura general del oscilador sintonizado.................................................20
Figura 2.13 Ejemplo de Oscilador Colpitts. Tomado de [5].............................................21
Figura 2.14 Modulador FSK. Tomado de [8] ..................................................................22
Figura 2.15 Diagrama de bloques del receptor super-heterodino. Tomado de [8] ...........23
Figura 2.16 Patrón de radiación de un dipolo de media longitud de onda. Tomado de [10]
..........................................................................................................................................30
Figura 2.17 Patrón de radiación en tres dimensiones de un dipolo de mitad de longitud de
onda. Tomado de [10] .......................................................................................................30
Figura 2.18 Equivalente de Thevenin de antena en recepción. Tomado de [10]..............33
Figura 3.1 Pinout del MAX232 ........................................................................................36
Figura 3.2 Esquema del sistema de comunicación. Tomado de [5] .................................37
Figura 3.3 Esquema utilizado para el modulador .............................................................42
Figura 3.4 Esquemático para el modulador de la computadora 1.....................................45
Figura 3.5 Esquemático para el modulador de la computadora 2.....................................45
Figura 3.6 Ámbitos de captura y de seguimiento de un PLL ...........................................47
Figura 3.7 Esquema del demodulador de tonos 30kHz y 50kHz......................................49
Figura 3.8 Esquema del demodulador de tonos 70kHz y 90kHz......................................49
Figura 3.9 Simulación modulación FSK...........................................................................50
Figura 3.10 Espectro de frecuencias de la señal moduladora y de la señal modulada .....51
Figura 3.11 Ampliación del espectro de frecuencias de la figura 3.10.............................52
Figura 3.12 Modulación FSK de la señal .........................................................................53
Figura 3.13 Espectro de frecuencias de la señal moduladora y de la señal modulada .....54
Figura 3.14 Señal moduladora en contraste con las señales demoduladas (con y sin ruido)
..........................................................................................................................................55
Figura 3.15 Diagrama de bloques del ML145152 ............................................................56
Figura 3.16 Esquema con lazo de realimentación del ML145152, el VCO y el prescaler
ML12017 ..........................................................................................................................57
Figura 3.17 Diagrama de Bloques del ML12017 .............................................................60
Figura 3.18 Diagrama de bloques general mostrando la conexión entre el prescaler y el
PLL ...................................................................................................................................61
Figura 3.19 Encapsulado del TOM9321...........................................................................62
Figura 3.20 Emisor RTFQ1 (arriba) y receptor RRFQ1...................................................63
Figura 3.21 Diagrama de bloques del RTFQ1 ..................................................................64
Figura 3.22 Diagrama de bloques del RRFQ1..................................................................64
Figura 3.23 Transceptor FSK de 9600baudios .................................................................65
Figura 3.24 Diagrama de Bloques del Transceptor FSK de 9600baudios........................66
Figura 4.1 Esquemático utilizado para la construcción del circuito impreso ...................68
Figura 4.2 Seleccionando la opción Edit Properties….....................................................69
Figura 4.3 Árbol del proyecto...........................................................................................70
Figura 4.4 Ventana Create Netlist.....................................................................................71
Figura 4.5 Imagen del circuito después de abrir el Netlist en el Layout ..........................72
Figura 4.6 Resultado del Ruteo. Vista de pistas y componentes ......................................74
Figura 4.7 Ventana de impresión del Orcad Layout .........................................................75
Figura 4.8 Circuitos impresos fabricados en el LECI.......................................................76
Figura 4.9 Soldadura de los componentes ........................................................................77
Figura 4.10 Circuito de transmisión y recepción terminado.............................................77
Figura 5.1 Captura del modulador de 30/50kHz. 1) Señal moduladora, 2) Señal modulada
..........................................................................................................................................80
Figura 5.2 Captura del modulador de 70/90kHz. 1) Señal moduladora, 2) Señal modulada
..........................................................................................................................................81
Figura 5.3 Captura del demodulador de 30/50kHz. 1) Señal de entrada al PLL de 30kHz,
2) salida de un 1 lógico del MAX232...............................................................................83
Figura 5.4 Captura del demodulador de 30/50kHz. 1) Señal de entrada al PLL de 50kHz,
2) salida de un 0 lógico del MAX232...............................................................................84
Figura 5.5 Captura del demodulador de 70/90kHz. 1) Señal de entrada al PLL de 70kHz,
2) salida de un 1 lógico del MAX232...............................................................................85
Figura 5.6 Captura del demodulador de 70/90kHz. 1) Señal de entrada al PLL de 90kHz,
2) salida de un 0 lógico del MAX232...............................................................................86
Figura 5.7 1) Señal enviada por la computadora 1. 2) Señal recibida en la computadora 2
..........................................................................................................................................88
Figura 5.8 1) Señal enviada por la computadora 2. 2) Señal recibida en la computadora 1
..........................................................................................................................................89
ÍNDICE DE TABLAS
Tabla 2.1 Conexión Null Modem sin Handshaking. Tomado de [5]................................16
Tabla 2.2 Clasificación de osciladores sintonizados.........................................................21
Tabla 3.1 Canales del Sintetizador. Tomado de [5]..........................................................59
Tabla 5.1 Datos obtenidos al probar el modulador 30/50kHz ..........................................80
Tabla 5.2 Datos obtenidos al probar el modulador 70/90kHz ..........................................82
Tabla 5.3 Datos obtenidos al probar el demodulador 30/50kHz ......................................84
Tabla 5.4 Datos obtenidos al probar el demodulador 70/90kHz ......................................86
NOMENCLATURA
AFSK
Audio Frequency Shift Keying
AM
Amplitud Modulation (Amplitud Modulada). Técnica de modulación en la cual se envía la información en una señal haciendo variar
la amplitud de ésta.
ASK
Amplitude Shift Keying (Modulación por cambio de Amplitud). Es
un tipo de modulación digital en el cual se cambia la amplitud de la
señal portadora entre dos valores predeterminados dependiendo del
valor de la moduladora.
BPSK
Bi-Phase Shift Keying. Modulación PSK en la cual se utiliza solamente dos fases para representar la información.
CMOS
Complementary MOS (MOS Complementario). Tecnología de circuitos digitales con la que se construye la gran mayoría de los dispositivos digitales actualmente. Consiste en la utilización de
transistores de Metal-Óxido Semiconductor de Efecto de Campo
(MOSFET) complementarios (de canal n y canal p) para producir
los valores lógicos.
DCE
Data Comunications Equipment (Equipo de Comunicación de Datos). Según el estandar RS-232, DCE es el equipo central de comunicaciones, el cual envía su información por medio del pin TX (Pin
de transmisión). Por lo general el DCE es la computadora.
DTE
Data Terminal Equipment (Equipo Terminal de Datos). Es el equipo que recibe la información, o sea, es el equipo que recibe la información a traves del pin de transmisión. Por lo general, DTE se
refiere al equipo que se conecta a la computadora (DCE).
FI
Frecuencia Intermedia. En un receptor superheterodino, se dice de
la frecuencia tomada despues de la etapa de mezcla. Generalmente
es una frecuencia de 455kHz para equipos AM y 10,7MHz para
FM.
FM
Frequency Modulation (Frecuencia Modulada). Es una técnica de
modulación en la que se varía la frecuencia de una señal de manera
que la señal se pueda recuperar en el receptor al detectar estos cambios.
FSK
Frequency Shift Keying (Modulación por Cambio de Frecuencia).
Tipo de modulación digital en la cual se cambia la frecuencia de la
portadora entre dos valores preestablecidos, dependiendo del valor
de la moduladora.
LO
Local Oscilator (Oscilador Local). En sistemas heterodinos, se dice
de la frecuencia de referencia que se utiliza para reducir la frecuencia de la señal RF.
PCB
Tarjeta de Circuito Impreso (Printed Circuit Board)
PLL
Phase Lock Loop (Lazo de Enganche de Fase). Lazo de realimentación electrónico que controla un VCO por medio de la diferencia de
fases de una señal que se intenta seguir y una señal producida por el
VCO.
PSK
Phase Shift Keying (Modulación por cambio de Fase) Modulación
digital basada en el cambio de fase de una señal para la transmisión
de datos.
QAM
Quadrature Amplitude Modulation (Modulación por amplitud en
cuadratura). Tipo de modulación que hace uso tanto de la modulación de amplitud como de la modulación de fase.
QPSK
Quadrature Phase Shift Keying (Modulación por Cambio de Fase en
Cuadratura). Modulación PSK en la cual se codifican dos bits a la
vez con una sola fase, por lo que se utilizan cuatro fases distintas
separadas 90º una de la otra.
RF
Radio Frecuencia.
RS-232
Estandar que define todas las especificaciones físicas del puerto serie de las computadoras.
TTL
Transistor-Transistor Logic (Lógica Transistor-Transistor) Familia
lógica de circuitos digitales en el que un uno lógico se toma como
un voltaje de 5V y un cero lógico se toma como un voltaje de 0V.
VCO
Oscilador Controlado por Voltaje
RESUMEN
El objetivo general del proyecto fue diseñar un dispositivo transmisor y receptor
que sirviera para comunicar dos computadoras en forma inalámbrica por medio de
radiofrecuencia usando el método de modulación FSK. El trabajo consta principalmente de tres fases: la primera fase corresponde a la investigación teórica sobre los
principales métodos de modulación, así como algunas topologías de implementación.
En la segunda parte se presentan los métodos de diseño del dispositivo transmisor y el
diseño e implementación del circuito impreso para el sistema diseñado. En la tercera
fase se construyó el circuito diseñado y además se hicieron en el laboratorio las pruebas sobre el desempeño de dicho circuito.
Al comunicar los circuitos entre sí se lograron velocidades de transmisión de
hasta 19200 bits por segundo con lo que se supera las velocidades alcanzadas en la
primera parte de este proyecto
Como en todo proyecto, se tuvo que lidiar con algunas dificultades como lo es la
falta de componentes electrónicos de radiofrecuencia en nuestro país, el cual fue el
mayor obstáculo. El mayor aporte realizado con este proyecto fue el de integrar la interfase TTL/RS232, el modulador y el demodulador en un único circuito impreso lo
cual hace que el sistema sea menos propenso a las fallas y menos sensible a la interferencia.
Se concluye que para poder transmitir se debe hacer uso de frecuencias lo suficientemente altas para que el tamaño de la antena requerida sea el adecuado. Para alcanzar estas frecuencias debe construirse el sintetizador de frecuencias que haga uso
de un prescaler. Debido a las altas frecuencias a las funciona el sintetizador, se recomienda que este también sea construido sobre una placa impresa.
CAPÍTULO 1: Introducción
A partir de la segunda mitad del siglo veinte el mundo ha sufrido una revolución
tecnológica sin precedentes en todos los campos. Los campos de la electrónica y las
telecomunicaciones han sido en gran medida promotores de esta revolución. Resulta
difícil de imaginar, por ejemplo, un viaje espacial sin la ayuda de sistemas electrónicos que controlen la navegación de la nave o la comunicación de ésta con el planeta
Tierra. Y lo más asombroso es que a pesar de todos los avances que tiene nuestra sociedad en estos campos hasta el día de hoy, pareciera que todavía no existe un límite
para que esta evolución tecnológica continúe.
Este trabajo pretende aportar un pequeñísimo grano de arena al campo de la
electrónica y las comunicaciones al diseñar e implementar un sistema que trabaja con
radiofrecuencias y que es capaz de intercomunicar dos computadoras por medio de su
puerto serial. Si bien es cierto que existen sistemas inalámbricos capaces de intercomunicar computadoras (Wi-Fi, Bluetooth, etc.), en el ámbito académico de nuestra
universidad existen pocas fuentes de información disponibles sobre sistemas de comunicación inalámbrica. Debido a esto uno de los objetivos de este proyecto es el de
realizar un documento que pueda guiar a futuros estudiantes de la ingeniería eléctrica
en el campo de la comunicación inalámbrica.
La razón que impulsó al autor a desarrollar este proyecto fue un proyecto realizado en el primer semestre del año 2006, el cual proponía la misma idea de intercomunicar dos computadoras en forma inalámbrica pero que por inconvenientes
técnicos no pudo ser completado de la manera que se pretendía en un principio.
El principal obstáculo que se pudo observar en el proyecto anterior fue que se
pretendió trabajar con radiofrecuencias por lo que se debió poner especial cuidado a
los componentes que se escogieron en la etapa de diseño pues los circuitos que trabajan en radiofrecuencias son más susceptibles al ruido y a la interferencia. Por otro lado, no todos los componentes electrónicos son aptos para trabajar en radiofrecuencias.
1
2
Un caso muy común es el de los amplificadores operacionales, los cuales atenúan la
señal cuando ésta tiene frecuencias altas.
Otro problema por resolver es de la escogencia (o el diseño, en caso de que fuera necesario) de una antena adecuada para la aplicación. Existe infinidad de tipos de
antenas en el mercado pero como es de esperarse muy pocas cumplen con las especificaciones que se buscan.
Los pasos a seguir para superar los anteriores problemas técnicos son, primero
que todo, la investigación teórica, la cual dará las bases para continuar con los siguientes pasos. El segundo paso a seguir es el de armar y poner en funcionamiento el
circuito diseñado por José David Rojas. El paso siguiente es el diseñar e implementar
las etapas de radiofrecuencia del circuito. Por último se harán pruebas al sistema diseñado tales como el alcance máximo, tasas de transmisión, entre otras.
1.1 Objetivos
1.1.1 Objetivo general
Continuar con el desarrollo de un dispositivo transmisor-receptor de radiodifusión para una comunicación FSK entre dos computadoras personales para un mediano
alcance (aproximadamente 3 Km.), proyecto iniciado por el estudiante José David
Rojas Fernández en el primer ciclo lectivo del año 2006.
1.1.2 Objetivos específicos
•
Desarrollar un dispositivo transmisor-receptor de radiodifusión para comunicación
inalámbrica FSK.
•
Desarrollar un documento sobre el funcionamiento de un transmisor (oscilador,
modulación,
etc.),
funcionamiento
de
un
receptor
(demodulación,
etc.),
amplificadores, fuentes de poder, antenas, ruido, distorsión y fidelidad.
•
Poner a disposición de los estudiantes de la escuela de ingeniería eléctrica un
documento para el desarrollo de un sistema de transmisión inalámbrico que permita
3
comprender mejor, por medio de un ejemplo práctico, el funcionamiento de los
sistemas de transmisión por radiodifusión.
•
Poner en comunicación dos computadoras personales utilizando el transmisorreceptor por medio de una comunicación serial a través del protocolo RS-232.
1.2 Metodología
La realización del proyecto incluye las siguientes etapas:
Investigación Teórica:
Esta es la primera etapa del proyecto y probablemente la más importante pues
es en esta etapa en la que se obtienen todos los conocimientos necesarios para poder
realizar los pasos siguientes. Debido a que los objetivos del proyecto son teóricoprácticos a cada objetivo de la investigación le sigue una etapa de implementación en
la que se debe investigar cuales son las configuraciones y componentes que mejor se
adaptan para cumplir con los objetivos propuestos.
Implementación del modulador y demodulador:
Para la construcción del modulador y demodulador se utilizó el diseñó realizado por José David Rojas. Se requirió hacer algunas modificaciones a éste diseño para adaptarlo a los nuevos requerimientos. Para esto se analizó cual fue la mejor
solución y se implementó dicha modificación.
Diseño de la etapa de radiofrecuencia:
La tercera fase del proyecto fue la del diseño e implementación del transmisor
de radiofrecuencia, el cual transmite en frecuencias del orden de los Megaherts. Como
en todo proyecto fue necesario realizar un diseño adecuado antes de implementar
cualquier tipo de circuito. Sin embargo un buen diseño no garantiza en un cien por
ciento el correcto funcionamiento del circuito diseñado pues pueden presentarse factores que no se consideraron en la etapa de diseño como lo es el ruido y la interferencia. Por lo tanto resultó necesario hacer ligeros ajustes al diseño durante la
implementación del mismo.
4
Implementación y pruebas del sistema:
Se implementaron todas las etapas que componen el sistema y se pusieron a funcionar en conjunto. Se hizo capturas y se obtuvo resultados del funcionamiento de las
etapas del circuito así como del funcionamiento del sistema completo. Dichos resultados y capturas se presentan en el capítulo de diseño del sistema.
CAPÍTULO 2: Desarrollo teórico
En este capítulo se hace un resumen teórico de los temas que se encuentran directamente relacionados con el proyecto realizado. Muchos de estos temas ya han sido tratados en la primera parte de este proyecto [5]. El objetivo de este capítulo es el
de hacer mención nuevamente a algunos de esos temas, ampliar otros que habían sido
tratados con menor detalle y agregar algunos nuevos que el autor consideró necesarios
para el desarrollo del proyecto.
2.1
Modulación
Esta sección ha sido adaptada de [7].
En los sistemas de comunicación, la información a transmitir por lo general no
se encuentra en una forma transmisible por el canal con el que se cuenta, pues en muchos casos la señal que porta la información pierde o ve modificadas sus características tales como amplitud o fase al ser enviada por dicho canal. Esto se debe tanto a las
características de la señal de información como de las características del canal.
Un caso muy común en la actualidad es el envío de datos digitales a través de
algún canal. Si se considera las señales digitales como ondas cuadradas, es muy probable que, dependiendo de las características del canal, durante la transmisión de los
datos los armónicos de alta frecuencia de este tipo de señales, se pierdan en el medio,
causando que los datos que llegan al receptor sean indescifrables.
Una de las principales razones para modular señales es poder enviar diferente
información que en un principio tiene la misma frecuencia (por ejemplo, señales de
voz) a través del mismo canal sin que haya interferencia, a esta característica se le
llama multiplexación en frecuencia. Otra razón de gran importancia es el de minimizar el tamaño de los aparatos electrónicos. Se busca aumentar la frecuencia de la señal
transmitida para reducir su longitud de onda. Esto permite reducir el tamaño de la antena que el equipo necesita para hacer la transmisión.
Se llama modulación al proceso de cambiar las propiedades de una señal para
poder enviar información codificada en la señal que se está enviando. El objetivo es
5
6
transmitir la información mediante señales más acordes con el medio de transmisión.
La figura 2.1 esquematiza a grandes rasgos el proceso de modulación de señales.
Figura 2.1 Esquema general de modulación. Tomado de [5]
La idea del sistema modulador es cambiar alguna propiedad de una señal portadora de manera que la información contenida de la señal moduladora se vea reflejada
en la señal portadora para transformarla en la señal modulada.
En la figura 2.1, por ejemplo, la propiedad de la señal portadora que se está
cambiando es la frecuencia. Si la frecuencia de la señal moduladora tiene un valor alto, la frecuencia de la señal modulada también será alta y viceversa. De esta manera
se logra cambiar las características de la señal portadora para tener una señal más apta
para ser transmitida. Es sistema completo de comunicación consta de un mecanismo
que provoque cambios en la señal portadora (modulador), un mecanismo que permita
enviar la señal a través del canal (por ejemplo una antena) y un sistema capaz de detectar la señal modulada y de extraer de ella la señal portadora.
Cualquier señal senoidal puede ser representada por la ecuación:
f (t ) = A(t ) ⋅ cos(ωt + φ 0 )
(2.1-1)
7
O sea, una señal senoidal es caracterizada por su Amplitud, su Frecuencia y su
Fase. Debido a esto son estas tres características las que comúnmente se manipulan a
la hora de modular una señal
Por ejemplo en la modulación de amplitud se encuentran los esquemas de modulación AM (“Amplitud Modulation”), OOK (“On-Off Keying”) y ASK (“Amplitude Shift Keying”). Para la modulación en frecuencia tenemos FM (“Frequency
Modulation”) y FSK (“Frequency Shift Keying”). En el caso de la modulación de fase
se pueden contar BPSK, QPSK. Algunos tipos de modulación que hacen variar más
de una propiedad a la vez como el QAM. En la figura 2.2, se muestra la forma de onda en el dominio de tiempo que se podría encontrar para cada una de las modulaciones.
Figura 2.2 Formas de onda en el dominio del tiempo para distintos tipos de modulación. Tomado de [7]
8
2.1.1
Modulación FSK
La modulación FSK (Frequency Shift Keying) es un tipo de modulación digital
que cambia la frecuencia de la portadora entre dos valores preestablecidos, dependiendo del valor del bit que se esté transmitiendo. Como se observa en la figura 2.3 un
valor de frecuencia corresponde a un uno y el otro valor de frecuencia corresponde a
un cero.
Figura 2.3 Señal FSK en el dominio del tiempo. Tomado de [5]
De la figura 2.3 se deducen dos hechos importantes:
•
La frecuencia de la portadora cambia de entre 2 frecuencias discretas.
•
Cada una de las frecuencias representa un 1 o un 0. Al valor lógico 1 se
le denomina Marca y se le asigna la frecuencia mayor. Al 0 lógico se le
llama espacio y se le asigna la frecuencia menor.
Parámetros de las señales FSK
Cuando se hace referencia a los parámetros de las señales FSK, se hace referencia a los aspectos que caracterizan en forma completa a una señal FSK. En la figura
2.4, se muestran los principales.
9
Figura 2.4 Parámetros de una señal FSK. Tomado de [5]
Según [6] los parámetros de la señal FSK son los siguientes:
•
Duración del Elemento (Element Length): Se refiere al tiempo mínimo que debe permanecer estable alguno de los dos valores de frecuencia,
ya sea el que corresponde a un 1 lógico o el que corresponde a un 0 lógico. Este valor depende de la aplicación en la que se esté utilizando la
modulación FSK y generalmente ronda entre los 5 y los 22 milisegundos.
•
Cambio (Shift): Se refiere a la diferencia entre la frecuencia que corresponde a un 1 lógico y la que corresponde a un 0 lógico. Por lo general se
encuentra entre los 50 y los 1000 Hz. Este valor es importante a la hora
de diseñar el equipo de comunicación, pues los dispositivos utilizados
deben tener el ancho de banda adecuado para poder captar ambas frecuencias.
•
Frecuencia Central (Central Frequency): Es el promedio de las frecuencias de marca y de espacio. Se conoce también como la frecuencia
nominal de la señal.
•
Desviación (Deviation): Es la distancia en Hz entre la frecuencia de
marca y la de espacio, con respecto a la frecuencia central.
10
•
Velocidad en baudios ("Keying Speed"): Se refiere a las veces que
una señal puede cambiar en un segundo. El valor de la velocidad corresponde al inverso de la Duración del elemento. Su unidad de medida es el
Hertz.
La señal FSK, puede ser enviada en forma sincrónica así como asincrónica.
Ambas formas tienen ventajas y desventajas. La señal sincrónica puede lograr mejores velocidades de transmisión pero resulta más cara y más difícil de implementar
pues debe lograr que se sincronicen el emisor y el receptor. Las señales asincrónicas
requieren de técnicas que indiquen a los equipos en que momento inicia y finaliza la
transmisión de datos.
Figura 2.5 Señal sincrónica vs señal asincrónica. Tomado de [5]
Las técnicas utilizadas consisten por lo general en el uso de “bits de control” para indicar el inicio de una comunicación, mediante un protocolo preestablecido. En la
señal sincrónica, los cambios en los bits se dan en los flancos de la señal de reloj
(puede ser en los flancos positivos o en los negativos). En la señal asincrónica es sigue el protocolo que se muestra a continuación:
11
•
Cuando no hay transmisión de datos, la señal del emisor se mantiene en
un 1 lógico.
•
Al llegar un flanco negativo, se indica al sistema que comenzará una
transmisión de datos en r segundos.
•
Transcurrido este tiempo, se enviarán 5 bits de información. El sistema
de recepción deberá entonces muestrear la señal cada cierto tiempo, dependiendo de la duración predefinida de los bits para lograr captar los
valores de los cinco bits.
•
Después de que se han enviado los 5 bits, se transmite el bit de fin de
transmisión. Este corresponde a un 1 lógico con una duración de por lo
menos 1.42 veces la duración de un bit normal.
•
2.2
El protocolo se repite cada vez que se desee iniciar una comunicación.
El puerto RS-232
En esta sección, se hace una breve descripción del puerto serial RS232. Esta información fue de utilidad cuando se diseño el hardware y el software que comunicaría
las computadoras con los moduladores. Para el sistema comunicación inalámbrica que
se desea desarrollar con el proyecto, la elección del puerto serial como puerto de comunicación resulta las más indicada pues es fácil de utilizar y además permite la
transmisión de datos a través de un solo cable. El nombre de RS232, se refiere al estándar que se utiliza para el puerto, y corresponde a Recommend Standard number
232.
2.2.1
Hardware
De acuerdo a [6] las especificaciones eléctricas del puerto serial son las siguientes:
12
•
Un cero lógico está representado por un voltaje entre los +5 y los +15
voltios si se trata de un cero que se está enviando. El cero lógico del receptor está representado por un voltaje entre los +3 y los +15 voltios.
•
Un uno lógico se representa por un voltaje entre los -5 y lo -15 voltios
para el emisor. Para el receptor, el uno lógico estará representado por un
voltaje entre los -3 y los -15 voltios. A este ámbito de voltaje se le denomina la “marca”.
Figura 2.6 Representación de un uno lógico y un cero lógico en el estándar
RS232. Adaptado de [6]
•
La región entre los -3 y los +3 voltios se toman como una etapa de transición y por ello representa un valor lógico indeterminado.
•
Un circuito abierto no debe exceder los 25 voltios con respecto a la tierra.
•
Un cortocircuito no debe superar 0.5 A.
•
El estándar especifica que la velocidad de transmisión de datos máxima
es de 20000 bits por segundo.
•
Para evitar interferencia en la línea el slew-rate máximo debe ser de
30V/µs.
•
La carga vista por el emisor debe estar entre los 3kΩ y los 7kΩ.
13
•
La carga capacitiva máxima en el cable que comunica al emisor y al receptor debe ser de 2500 pF.
El estándar RS232 especifica un conector de 25 pines el cual cuenta con todos
las señales definidas para este puerto. Sin embargo se cuenta también con un conector
de 9 pines en el que se encuentran solamente las señales más necesarias. Este puerto
de nueve pines es el que comúnmente se encuentra en las computadoras personales.
Figura 2.7 Asignación de pines del RS-232. Tomado de [6]
A continuación se presenta una descripción de los pines del puerto RS232 (Basada en [6]):
•
Pin TD: Pin 2 del DB25 y pin 3 del DB9: En este pin viaja la información desde el dispositivo DTE al DCE1. Sin embargo, se debe hacer una
aclaración. La nomenclatura de los pines se dispuso desde el punto de
vista del DTE, esto es, en el caso que el cable que uniera un dispositivo
DTE con uno DCE, fuera uno a uno (pin uno del DTE al pin uno DCE),
el DTE enviaría los datos por el pin TD y el dispositivo DCE recibiría el
dato también por el pin TD, es decir, el dispositivo DCE, recibe los datos
por el pin Transmitted Data. Sin embargo, en algunos casos, los diseña-
1
DTE: data terminal equipment. Corresponde a la computadora
DCE: data circuit-terminating equipment. Corresponde al periférico
14
dores de sistemas de comunicación cambian el nombre de los pines para
que sean más fácilmente identificables. Esta línea se mantiene en un 1
lógico cuando no hay comunicación entre los dispositivos.
•
Pin RD: es donde el dispositivo DTE recibe los datos. Mantiene un uno
lógico cuando no hay comunicación.
•
RTS: El dispositivo DTE pone un uno lógico para indicar que está listo
para enviar un dato.
•
CTS: El dispositivo DCE pone un 1 lógico para indicarle al DTE que
puede recibir un dato.
•
DTR y DSR: Su función es la de indicar que un dispositivo está conectado y encendido.
•
DCD: Línea usada por los MODEM para indicar que se ha hecho conexión con otro MODEM.
•
Clock Signals: Los pines 15, 17 y 24 son utilizados para comunicaciones sincrónicas.
•
Pines Secundarios: Los pines 12, 13 y 14, se usan para el manejo de
módems remotos, habilitación de cambios en la tasa de transmisión durante la comunicación, retransmisión en caso de que se detecte un error
de paridad.
•
RI (“Ring Indicator”): Cuando tiene una marca, se indica que una señal de timbrado se está recibiendo en el canal de comunicaciones. Esta
línea simula el timbrado del teléfono cuando el MODEM recibe una llamada.
15
2.2.2
Protocolos de Control de Información
En cualquier comunicación digital, es necesario que emisor y receptor sigan un
protocolo de comunicación para que la comunicación sea llevada a cabo con éxito.
Este protocolo se conoce con el nombre de “handshaking”2.
En el estándar RS-232 existen varios pines que se utilizan para el control de la
transmisión de información entre el DTE Y el DCE. Pero existe el caso de que se
quiera comunicar dos DTE, o que por alguna razón no se pueda utilizar un cable con
todos los conductores necesarios para una transmisión tal y como la establece el estándar.
Como solución a estas distintas situaciones se han creado distintos protocolos de
handshaking que permiten la comunicación por el puesto serial sin necesidad de utilizar todos los pines y que permiten también la comunicación de equipos que normalmente no podrían interconectarse entre si. Estos protocolos de handshaking pueden
implementarse tanto por medio de hardware como por medio de software. En el caso
de este proyecto se utiliza una conexión Null MODEM sin handshaking, al cual se
hace referencia en la figura 2.8 y la tabla 2.1, y se hace el control del flujo de datos
por medio de handshaking de software.
Figura 2.8 Conexión Null Modem sin Handshaking. Tomado de [5]
16
Tabla 2.1 Conexión Null Modem sin Handshaking. Tomado de [5]
Conector 1
Conector 2
Función
2
3
Rx ← Tx
3
2
Tx → Rx
5
5
Tierra
El Null Modem sin Handshaking es la forma de conexión más simple, por lo
menos desde el punto de vista de hardware. Consiste en no utilizar los bits de control,
sino solamente las líneas de datos.
Con respecto al handshaking por medio software se debe mencionar que se logra
enviando un caracter especial que representa cierto estado de la comunicación. Este
handshaking se conoce también como Xon/Xoff. Consiste en enviar un carácter especial con el cual se le indica al receptor que está listo para empezar la comunicación
(Xon) y otro caracter le indica al emisor que no está listo para recibir datos (Xoff).
El caracter elegido para el Xon es el ASCII 17 y el caracter de Xoff es el ASCII
19. Si algún dispositivo necesita detener la comunicación, mandará por la línea de
comunicaciones los bits correspondientes a Xoff. Si la comunicación puede ser reiniciada, entonces el dispositivo que está listo enviará un Xon. Este tipo de control tiene
el problema de que si hay algún error en la transmisión de datos y se pierde un solo
bit, el equipo no podrá reconocer si ha recibido un Xoff o un Xon, por lo que el equipo no se dará cuenta cuando debe empezar a enviar o recibir información. Para evitar
este tipo de errores se debe bajar la velocidad de la transmisión, por lo que se tendrán
bitrates más bajos que si se utilizan otras formas de control.
2
Handshaking se podría traducir como “apretón de manos” entre los equipos conectados.
17
2.3
Moduladores
Tal y como se dijo páginas atrás, la modulación FSK consiste básicamente en
modificar la frecuencia de la portadora dependiendo del valor lógico de la señal moduladora. Se acostumbra que la frecuencia de la señal que corresponde a un uno lógico sea más alta que la frecuencia correspondiente a un cero lógico, además la
frecuencia intermedia entre estos dos valores es la correspondiente a la señal modulada.
Teniendo esto en cuenta se procede a la búsqueda de diseños de circuitos físicamente realizables con los que se pueda realizar la modulación y que además sea
compatible con TTL.
A continuación se presenta un resumen de varios esquemas utilizados para la
modulación FSK. Cada esquema presentado varía tanto en la frecuencia máxima que
puede alcanzar como en la estabilidad de dicha frecuencia (la estabilidad es dependienta de las condiciones ambientales tales como la temperatura), en el nivel de complejidad del circuito y por consiguiente en el costo que dicho circuito puede llegar a
tener. Se ha hecho esta adaptación de [5] y [8].
2.3.1
Osciladores
Consiste en un circuito oscilante que pueda cambiar su frecuencia de oscilación
por medio de un dispositivo como por ejemplo un transistor. Su principal problema es
que es altamente susceptible a las variaciones de las condiciones ambientales como la
temperatura.
Deben cumplirse las siguientes condiciones para que el circuito oscile en forma
mantenida:
•
La magnitud del lazo de ganancia debe ser 1 a la frecuencia de oscilación.
•
La señal de realimentación debe estar en fase con la señal a la entrada del
amplificador como se muestra en la figura siguiente:
18
El siguiente es el esquema general de un oscilador:
Figura 2.9 Esquema general de un oscilador. Tomado de [5]
Antes que el interruptor se cierre, existe un voltaje “ficticio” provocado por el
ruido que normalmente se encuentra en todos los circuitos. Este voltaje es amplificado y pasa por la red de realimentación (β), provocando un voltaje Vf. Si la ganancia
de lazo (β·A) es correcta, Vf y Vi serán iguales. Una vez que se cierra el lazo, el circuito seguirá operando, dado que el voltaje a la entrada del amplificador es suficiente
para mantener la oscilación.
Puede demostrarse que la ganancia de lazo cerrado vendría dada por:
V0
A
=
Vi 1 − Aβ
(2.3-1)
Donde Aβ = 1 , por lo que la ganancia sería infinita. Precisamente es esto lo que
se busca en un oscilador. En la práctica lo que se hace es hacer la ganancia de lazo
mayor a uno con lo cual es suficiente para que el sistema comience a oscilar.
19
2.3.2
Osciladores de cristal
Los osciladores de cristal utilizan cristales de cuarzo, los cuales se utilizan para
producir una frecuencia de referencia para los elementos osciladores de los transmisores y receptores RF, como se verá más adelante.
El diagrama representativo de un cristal de cuarzo y su respectivo circuito equivalente se muestran en la figura 2.10.
Figura 2.10 Circuito equivalente del cristal de cuarzo. Tomado de [13]
Los cristales tienen dos picos de resonancia. En estos picos de resonancia, la
impedancia del cristal es resistiva. Por debajo y sobre la frecuencia de resonancia, el
cristal tiene una impedancia capacitiva y en las frecuencias entre los picos de resonancia, el cristal tiene una impedancia inductiva.
Figura 2.11Curva de impedancia del cristal. Tomado de [5]
20
A continuación se presentan algunos de los osciladores basados en cristales resonantes. A los osciladores que están basados en cristales resonantes comúnmente se
les llama osciladores sintonizados. La forma general de este tipo de osciladores se
presenta en la figura siguiente:
Figura 2.12 Estructura general del oscilador sintonizado
En la tabla 2.2 se puede apreciar la clasificación que se ha hecho para los osciladores sintonizados. Esta clasificación depende del tipo de reactancia de los parámetros X1, X2 y X3.
21
Tabla 2.2 Clasificación de osciladores sintonizados
Tipo de Oscilador
Elemento de Reactancia
X1
X2
X3
Oscilador Colpitts
C
C
L
Oscilador Hartley
L
LC
C
LC
LC
-
Entrada sintonizada, salida sintonizada
De estos tipos de osciladores, el más popular es el Colpitts, puesto que es más
sencillo utilizar capacitores en los circuitos electrónicos que inductores. El cristal en
este caso se puede utilizar como un sustituto de la reactancia inductiva en el circuito
sintonizado. El siguiente es un ejemplo de un oscilador Colpitts:
Figura 2.13 Ejemplo de Oscilador Colpitts. Tomado de [5]
Este oscilador puede utilizarse para generar señales de frecuencias desde 1MHz
hasta 20MHz y utiliza la frecuencia fundamental del cristal. Tal y como se explica en
[5] “R1 proporciona la polarización de corriente directa del transistor. El capacitor C5
22
bloquea el DC a la salida y el capacitor C4 mantiene el colector a tierra para las señales AC, mientras deja pasar el voltaje DC. Los capacitores C1 y C2 son los que proporcionan la realimentación del oscilador.”
2.3.3
Moduladores basados en PLL, VCO y cristales osciladores
En la figura 2.14 se presenta el diagrama de bloques de un modulador FSK. Su
funcionamiento se explica con detalle en [5].
Figura 2.14 Modulador FSK. Tomado de [8]
El funcionamiento del sistema es como sigue: La entrada del sistema corresponde a un oscilador de referencia de unos cuantos megahertz. El VCO es un oscilador de
alta frecuencia, oscila a la frecuencia deseada. Esta señal es realimentada por medio
de un divisor de frecuencia. La frecuencia dividida es comparada con la del oscilador
de referencia. De esta manera, el VCO cambiará de frecuencia hasta que el oscilador
de referencia y la señal realimentada estén en fase. La señal modulada con FSK se logra al hacer variar la frecuencia de referencia.
La función del filtro paso bajo es eliminar la componente AC de esta señal,
permitiendo el paso de una señal que es proporcional a la diferencia en las fases.
Cuando las dos señales estén en fase, el VCO se mantendrá oscilando a la frecuencia
deseada.
23
El divisor de frecuencia permite alcanzar frecuencias altas que no se podrían alcanzar con el cristal.
La etapa de amplificación es un amplificador de potencia que amplifica la señal
que será transmitida a través de la antena.
2.4
Receptores FSK
Luego de la etapa de modulación se transmite la señal a través de las antenas,
una de ellas emite la señal y la otra la recibe en el otro equipo. Esta señal recibida debe pasar por varias etapas para convertirla en una señal que la computadora pueda interpretar. La primera de estas etapas consiste en convertir la señal a una señal de una
frecuencia menor. Para esto se utiliza un receptor Super-Heterodino. Las siguientes
líneas tratan sobre este tipo de receptores.
2.4.1
Receptores super-heterodinos
Como se dijo anteriormente, en este tipo de receptores las señales recibidas se
convierten en señales de una magnitud menor predefinida. Su diagrama de bloques es
el siguiente:
Figura 2.15 Diagrama de bloques del receptor super-heterodino. Tomado
de [8]
24
Según [5] su funcionamiento es el siguiente:
•
La señal pasa primero por un filtro pasabanda centrado en la frecuencia deseada (frecuencia RF).
•
El bloque denominado LNA es un amplificador de bajo ruido (Low Noise
Amplifier).
•
La señal RF es multiplicada por una señal local de un frecuencia menor denominada Oscilador local (LO, Local Oscillator), en la etapa de mezcla
(Mixer). De esta etapa, se genera una señal de dos componentes, una a frecuencia RF-LO y otra de RF+LO.
•
Cualquiera de las dos señales se puede utilizar, pero se suele utilizar la frecuencia menor. De hecho, el filtro de la etapa siguiente deja pasar solamente
una de las dos señales, a la que se le suele denominar señal intermedia IF
(Intermediate Frequency), donde
IF = RF − LO
•
(2.4-1)
La señal pasa luego por un limitador que la convierte en una señal cuadrada
y elimina cualquier modulación de amplitud que haya aparecido en el proceso.
•
Esta onda pasa por el demodulador de FSK (discriminador) que emplea un
circuito resonante en la frecuencia IF, para luego pasar por un comparador
que genera los datos de salida (Data Slicer).
Una de las mayores ventajas que tienen este tipo de receptores es que tienen una
alta selectividad, pues en primer lugar la señal recibida pasa por el filtro y además de
eso las etapas posteriores al mixer solo responden a la frecuencia intermedia y las frecuencias cercanas a la frecuencia central serán ignoradas. Esto permite que el filtro
paso bandas de la entrada pueda ser diseñado con una banda más ancha para el caso
de que se deban recibir varias frecuencias a través de la misma antena.
25
2.5
Antenas
Parte de esta sección ha sido adaptada de [10] y será de utilidad a la hora de escoger una antena adecuada para el sistema de comunicación.
2.5.1
Aspectos generales
Existen fundamentalmente dos tipos de antenas. Dicha clasificación se ha hecho
haciendo referencia a un plano específico (horizontal o vertical generalmente) del espacio tridimensional:
1. Omnidireccionales (irradian ondas electromagnéticas por igual en el plano)
2. Direccionales (irradian más en una dirección que en otra en el plano)
Todas las antenas irradian algo de energía en todas las direcciones en el espacio
libre pero dependiendo del diseño hecho las antenas pueden irradiar una gran cantidad
de energía en direcciones específicas y cantidades de energía despreciables en las
otras direcciones. Esto se logra haciendo variaciones en la longitud, espaciamiento y
orientación de la antena.
Un arreglo de antenas es un conjunto de antenas interconectadas con una fuente
común (o una carga común) para producir un determinado patrón de radiación.
Usualmente la relación espacial entre estas antenas es un factor determinante en el patrón de radiación de dichas antenas.
Se conoce como un componente de la antena a una porción de la antena que realiza una función distinta y que su uso se encuentra limitado a la antena, tal como un
reflector, un director o una antena activa. En los siguientes párrafos se mencionan las
partes más importantes de una antena y se hace una breve descripción de los mismos
Se conoce como irradiador pasivo ó elemento parásito a un elemento de antena
que no tiene una entrada cableada, sino que absorbe ondas de radio irradiadas por un
elemento activo de la antena que se encuentra próximo y las re-irradia en fase con el
26
elemento activo lo cual se suma a la señal transmitida total, generalmente cambiando
el patrón de radiación de la antena.
Un refractor de onda es una estructura que se coloca con una posición y una estructura que aceleran o retardan las ondas electromagnéticas transmitidas. Los refractores alteran la dirección de propagación de las ondas emitidas. Pueden también dar a
la onda dirección hacia un foco o alterar el frente de onda (por ejemplo cambiando un
frente de onda esférico en un frente de onda plano o viceversa).
Otro elemento importante en la estructura de las antenas es el conocido como
reflector, que usualmente es una estructura metálica conductiva (por ejemplo una pantalla o plato) que irradia de vuelta hacia el espacio libre las ondas de radiación electromagnética que vienen o se dirigen hacia la antena activa. El reflector modifica la
radiación de la antena activa.
Los criterios de diseño de las antenas difieren ligeramente dependiendo si son
antenas para recepción o para emisión de ondas pero generalmente una antena puede
recibir o emitir ondas igualmente bien. Esta propiedad se conoce como reciprocidad.
La gran mayoría de las antenas son simplemente barras verticales de un cuarto
de longitud de onda de largo. Este tipo de antenas son de fácil construcción, usualmente de bajo costo y reciben e irradian ondas en todas las direcciones horizontales
(omnidireccionales). Tienen el inconveniente de que no irradian o reciben ondas en la
dirección en que se encuentra orientada la barra, esta dirección se llama el cono ciego
o cono de silencio de la antena.
2.5.2
Parámetros de antenas
Existen varios parámetros críticos que afectan el rendimiento de una antena y
deben ser tomados en cuenta durante la etapa de diseño. Estos son la frecuencia de resonancia, impedancia, ganancia, apertura (patrón de radiación), polarización, eficiencia y ancho de banda. Las antenas de transmisión también tienen un valor máximo de
potencia, y las antenas de recepción difieren en las propiedades de rechazo de ruido.
27
Frecuencia de resonancia
La frecuencia de resonancia y la resonancia eléctrica se encuentran relacionadas
a la longitud eléctrica de la antena. La longitud eléctrica de la antena generalmente se
define como la longitud física de la antena multiplicada por la proporción de la velocidad de la propagación de la onda en el cable. Normalmente las antenas se las sintoniza para trabajar a una frecuencia específica y es efectiva para un rango de
frecuencias que usualmente se encuentra centrado en la frecuencia de resonancia. Sin
embargo, las otras propiedades de las antenas (en espacial el patrón de radiación y la
impedancia) varían conforme varía la frecuencia, por lo que la frecuencia de resonancia de la antena puede estar cerca de la frecuencia central de esas otras propiedades.
Las antenas pueden ser resonantes a frecuencias armónicas con longitudes de
onda que son fracciones de la longitud de onda fundamental. Algunos diseños de antenas tienen múltiples frecuencias resonantes, y algunas de ellas son relativamente
efectivas en un rango amplio de frecuencias. El tipo más común de antenas de rango
de frecuencias ancho son las antenas logarítmicas, pero su ganancia es mucho menor
que aquellas que han sido diseñadas para un rango de frecuencias mas angosto.
Ganancia
El parámetro de ganancia mide la direccionalidad de una antena dada. Una antena con una baja ganancia emite radiación en todas las direcciones por igual, mientras
que una antena con una ganancia alta irradiará hacia direcciones predeterminadas. Específicamente, la ganancia es definida como la proporción de la intensidad (potencia
por unidad de superficie) irradiada por la antena en una dirección dada a una distancia
arbitraria dividida por la intensidad irradiada a la misma distancia por una hipotética
antena isotrópica, tal y como lo muestra la ecuación:
P
S ant
G=
P
S iso
(2.5-1)
28
La ganancia de la antena es un fenómeno pasivo. La antena no proporciona potencia al sistema, sino que simplemente la redistribuye para proporcionar más potencia en cierta dirección específica. Si la antena tiene ganancia mayor a la unidad en
cierta dirección, entonces es un hecho que en otras direcciones tendrá ganancia menor
a la unidad pues la energía en la antena se conserva. La ganancia de la antena se encuentra relacionada a la utilidad que se la va a dar a la antena. Por ejemplo, antenas
con altas ganancias tienen la ventaja de tener mayores alcances y mejor calidad en la
señal pero deben ser apuntadas cuidadosamente en una dirección específica. Por el
contrario, las antenas de ganancias bajas tienen menor alcance pero la orientación de
la antena es irrelevante. Por ejemplo una antena parabólica es una antena de alta ganancia y debe ser apuntada en una dirección específica para que sea efectiva, mientras
que una antena de Wi-Fi en una computadora personal es una antena de baja ganancia
para la cual no interesa la orientación de la antena mientras el punto de acceso (access
point) se encuentre dentro del rango de alcance.
La ganancia de la antena está dada por la siguiente ecuación:
G=
A2
30Rs
(2.5-2)
Donde:
A es una constante característica para cada antena
Rs es la parte resistiva de la impedancia en serie de la antena
Ancho de banda
El ancho de banda de una antena es el rango de frecuencias para las cuales la antena es efectiva, generalmente centrado en la frecuencia resonante. El ancho de banda
de la antena puede ser incrementado mediante varias técnicas, incluyendo el uso de
cables más densos, adelgazando los componentes de la antena, y combinando múltiples antenas en una sola estructura y permitiendo que la impedancia natural selecciones la antena correcta. Por lo general se prefieren antenas pequeñas pero la capacidad
29
de fabricar antenas pequeñas se ve limitada por la relación entre ancho de banda, tamaño y eficiencia.
Impedancia
La impedancia es análoga al índice de refracción en óptica. En el trayecto de la
onda electromagnética través de las partes de la antena, esta se encuentra con diferencias en la impedancia. En cada interfaz, dependiendo de cómo se acoplen dichas impedancias, una parte de la energía se reflejará de vuelta a la fuente, formando una
onda estacionaria en la línea de alimentación. La relación entre la mínima potencia y
la máxima potencia de la onda se conoce como Relación de onda estacionaria (Standing Wave Ratio, SWR). Lo ideal es un SWR de 1:1. Si se reducen las diferencias de
impedancia en cada interfaz de la antena se reducirá el SWR y se maximizará la transferencia de potencia a través de cada parte de la antena.
Patrón de Radiación
El patrón de radiación es una descripción gráfica de la intensidad con la que se
transmite la onda electromagnética. Si la radiación de la antena es simétrica con respecto un eje (como en el caso de un dipolo, o el de algunas antenas parabólicas), un
único gráfico es suficiente.
30
Figura 2.16 Patrón de radiación de un dipolo de media longitud de onda.
Tomado de [10]
El patrón de radiación de una antena puede definirse como el lugar de todos los
puntos donde la potencia emitida por unidad de superficie es la misma. Dado que la
potencia irradiada por unidad de superficie es proporcional al cuadrado del campo
eléctrico de la onda electromagnética, entonces el patrón de radiación es también el
lugar de puntos con el mismo campo eléctrico. Por lo general se toma como referencia el mejor ángulo de emisión.
Figura 2.17 Patrón de radiación en tres dimensiones de un dipolo de mitad
de longitud de onda. Tomado de [10]
31
Polarización
La polarización de una antena es la orientación del campo eléctrico de la onda
con respecto a la superficie de la tierra y está determinada por la estructura física de la
antena y por su orientación.
La reflexión de las ondas generalmente afecta su polarización. Para ondas de radio el reflector más importante es la ionosfera. Las ondas que son reflejadas de la ionosfera sufren un cambio impredecible en su polarización.
Sin embargo, en la construcción de antenas, la polarización es bastante predecible sobretodo en antenas direccionales, la polarización de los lóbulos laterales puede
ser bastante diferente a la del lóbulo principal. En antenas de radio la polarización corresponde a la orientación del elemento radiante de la antena. Por ejemplo una antena
vertical omnidireccional de WiFi tiene polarización vertical.
En la práctica es importante que la polarización de las antenas emisoras calce
con la de las receptoras, esto con el objetivo de evitar que la potencia de la señal recibida se reduzca dramáticamente. Así que deben usarse receptoras horizontales con
emisoras horizontales y receptoras verticales con emisoras verticales.
Eficiencia
La eficiencia es la proporción de energía en las terminales de la antena que es
irradiada. Por ejemplo una carga puede tener un SWR de 1:1 y a la vez tener una eficiencia igual cero siendo esta una carga que absorbe toda la potencia e irradia calor
pero no energía electromagnética. De esta forma se puede ver que el SWR por si solo
no es una forma efectiva de medir la eficiencia de la antena. La radiación de la antena
es provocada por la resistencia de radiación, la cual solamente puede ser medida como parte de la resistencia total la cual incluya la resistencia eléctrica. La resistencia
eléctrica provoca generación de calor en lugar de radiación, lo cual reduce la eficiencia.
32
2.5.3
Tipos de antenas
Existen muchos tipos de antenas y cada tipo cuenta con múltiples configuraciones. En las siguientes líneas se describen los dos tipos que más interesan en este proyecto.
El radiador isotrópico es una antena meramente teórica que irradia de igual
forma en todas las direcciones. Se considera como un punto en el espacio sin dimensión ni masa. Evidentemente esta antena no puede existir físicamente, pero su modelo
teórico es útil para compararlo con antenas reales. Por lo general, la ganancia de las
antenas se mide con respecto a un radiador isotrópico y se utilizan unidades dBi (decibeles con respecto a una antena isotrópica.
La antena bipolar consta simplemente de dos conductores apuntando en dirección opuesta, colocados en forma horizontal o vertical, con un extremo conectado a la
radio y otro queda en el espacio libre. Dado que esta es la antena más simple, también
es usada como modelo de referencia para otras antenas. La ganancia con respecto a un
dipolo es representada por medio de dBd. Generalmente al dipolo se le considera omnidireccional en el plano perpendicular al eje de la antena pero casi no irradia e la dirección del eje. Algunas de las variaciones del dipolo son el dipolo plegado y la
antena de mitad de onda. En el caso del dipolo de media onda la longitud de la antena
es la mitad de la longitud de onda de la señal para la cual fue diseñada.
2.5.4
Antenas en recepción
Como se dijo antes, la ganancia en una dirección dada y la impedancia a una
frecuencia dada son las mismas cuando la antena es usada en transmisión o en recepción.
El campo eléctrico de una onda electromagnética induce un pequeño voltaje en
cada pequeño segmento de conductor eléctrico. El voltaje inducido depende del campo eléctrico y del largo del conductor. Depende también de la orientación relativa del
segmento de conductor con respecto al campo eléctrico.
33
Cada pequeño voltaje induce una corriente y esas corrientes circulan a través de
una pequeña parte de la antena. El análisis de estas corrientes y voltajes en la antena
no es sencillo, sin embargo, usando el teorema de reciprocidad es posible demostrar
que el circuito equivalente de Thevenin de una antena en recepción es:
Figura 2.18 Equivalente de Thevenin de antena en recepción. Tomado de
[10]
Va =
Ra Ga λ cosψ
πZ 0
Eb
(2.5-3)
Donde:
•
Va es el voltaje equivalente de Thevenin
•
Za es la impedancia equivalente de Thevenin (es la misma que la impedancia de la antena)
•
Ra es la parte real de Za
•
Ga es la ganancia directiva de la antena (la misma que en emisión) en la
dirección de las ondas electromagnéticas recibidas
•
λ es la longitud de onda
•
Eb es el campo eléctrico de la onda electromagnética recibida
•
ψ es el ángulo de desviación del campo eléctrico recibido con respecto a
la antena. En el caso de un dipolo, el máximo voltaje inducido es obtenido cuando el campo eléctrico está paralelo al dipolo. Si ese no fuera el
34
caso y existiera un ángulo de desviación, entonces el voltaje inducido
debe multiplicarse por cos v.
•
Zo = 379,73031 ohms es la constante universal llamada impedancia al
vacío.
La ecuación (2.5-3) es valida para cualquier tipo de antena. De esta ecuación se
deducen las siguientes definiciones:
Longitud eficaz de la antena: es la longitud a la cual, multiplicada por el campo eléctrico de la onda recibida se obtiene el voltaje del circuito equivalente de Thevenin de la antena.
Longitud _ eficaz =
Ra Ga λ cosψ
πZ o
(2.5-4)
Máxima potencia disponible: es la máxima potencia que una antena puede extraer de la onda electromagnética recibida.
Máx _ Pot _ disponible =
Ga λ2 2
Eb
4πZ o
(2.5-5)
Sección transversal o superficie de captura eficaz: es la superficie que, multiplicada por la potencia por unidad de superficie de la señal recibida da la máxima potencia disponible.
Superficie _ Captura _ Eficaz =
Ga 2
λ
4π
(2.5-6)
La máxima potencia que la antena puede extraer del campo electromagnético
depende solamente de la ganancia de la antena y del cuadrado de la longitud de onda.
No depende de las dimensiones físicas de la antena.
CAPÍTULO 3: Diseño del sistema de comunicación
Hasta el momento se han presentado en éste informe las bases teóricas necesarias para el desarrollo del sistema que se desea crear. En este capítulo se resume el
proceso de diseño por medio del cual fueron realizados tanto el sistema de emisión
como el de recepción de datos.
Los componentes electrónicos del sistema de transmisión diseñado se limitan a
los componentes que se pueden encontrar en la bodega de la escuela y al mercado nacional debido a la dificultad para comprar artículos en el exterior del país.
El diseño de las etapas del sistema de transmisión se basa en los esquemas presentados en el capítulo anterior, así como en los esquemas que se proponen en las
hojas de fabricante de los componentes electrónicos y en los diseños propuestos en
[5].
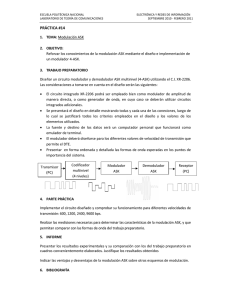
A grandes rasgos se puede mencionar que las etapas del sistema de transmisión
son las siguientes:
•
La interfase RS-232/TTL
•
El sistema modulador FSK
•
El sistema demodulador FSK
•
La etapa de radiofrecuencia (RF)
Como es de esperar todas las etapas presentan su grado de dificultad, pero en
especial la etapa de RF, pues en esta etapa se trabaja a frecuencias altas que pueden
provocar dificultades a la hora de trabajar sobre una protoboard por la interferencia
que pueden generar en las otras etapas del sistema. Además, por lo general los componentes electrónicos necesarios para trabajar en radiofrecuencias son de alto costo y
son difíciles de conseguir en nuestro país.
Para la comunicación entre las etapas de modulación y demodulación con la
computadora se escogió el MAX232 para que sirva como interfase, pues este circuito
convierte las señales digitales provenientes de la computadora (las cuales se encuen35
36
tran a niveles de voltaje de +15V y -15V), en señales digitales compatibles con la familia lógica TTL (con niveles de voltaje de 0V y +5V) y viceversa. Este circuito
cuenta con cuatro canales de comunicación, dos en cada sentido, pero se utilizó solamente un canal para los datos provenientes de la computadora y otro para los datos
que van hacia la computadora. El MAX232 tiene la ventaja de que para funcionar necesita solamente que se le adicione cinco capacitores externos tal y como se muestra
en la figura 3.1. Además, el MAX232 solamente necesita una fuente de alimentación
de +5V pues el resto de los voltajes que necesita para lograr los voltajes compatibles
con el puerto RS-232 los obtiene por medio de los capacitores externos. Dado que no
se consiguió el MAX232 se utilizó para la interfase el equivalente de NTE, o sea, el
NTE7142.
Figura 3.1 Pinout del MAX232
37
En las páginas siguientes se desarrolla con detalle los pasos seguidos en el diseño de las demás etapas del sistema de comunicación.
3.1 Diagrama General del Sistema de Comunicación
Ahora se dará un vistazo al sistema que se quiso implementar en una forma global. Primero es necesario tener una idea general del sistema tomando en cuenta cada
una de sus etapas en forma de bloques antes de entrar en detalles de lo que se quiere
diseñar para cada bloque en forma específica.
Figura 3.2 Esquema del sistema de comunicación. Tomado de [5]
El esquema general del sistema guarda bastante semejanza con los sistemas estudiados en la Nota Teórica. Según [11] una forma conveniente para comunicar computadoras es por medio de la modulación AFSK, la cual es una variante de la ya
mencionada modulación FSK en la cual las señales digitales son representadas como
cambios en la frecuencia de un tono de audio produciendo una señal codificada apta
para su transmisión vía radio o vía teléfono. Al igual que en la modulación FSK, la
transmisión varía entre dos tonos: la “marca” y el “espacio”, los cuales representan al
uno y al cero binarios respectivamente. AFSK difiere de FSK en que en AFSK la modulación es realizada en la banda base. En aplicaciones de radio como la que se quiere
desarrollar la señal modulada con AFSK normalmente es utilizada para modular una
38
señal portadora en el rango de las frecuencias de radio, utilizando técnicas de modulación como el AM y el FM.
Por lo tanto se planea diseñar un sistema basado en la modulación AFSK
haciendo uso del los elementos disponibles en la bodega de la Escuela de Ingeniería
Eléctrica y en el mercado nacional. Sin embargo, se desea que la tasa de transmisión
de datos sea lo más alta posible, por lo menos de 9600bps, por lo que la frecuencia de
los tonos en la modulación AFSK debe ir más allá del ámbito de frecuencias audibles.
Se planteó que el sistema funcionaría con cuatro frecuencias diferentes. Esto a
causa de que se tiene dos vías de comunicación, una que emite y otra que recibe.
Además, cada vía de comunicación requiere de dos frecuencias diferentes para poder
representar la “marca” y el “espacio”.
Lo anterior queda resumido de la siguiente manera:
•
30kHz para representar un cero en la computadora 1
•
50kHz para representar un uno en la computadora 1
•
70kHz para representar un cero en la computadora 2
•
90kHz para representar un uno en la computadora 2
El origen y destino de los datos son las computadoras, las cuales envían y reci-
ben los datos a través del puerto serie de nueve pines RS232-DB9. El control de la
comunicación lo realiza el programa proy.exe, creado por José David Rojas Fernández.
Como se mencionó anteriormente, el dispositivo MAX232 es el que servirá como interfase entre la computadora y el resto de los dispositivos los cuales son de tecnología TTL. Esta primera etapa es de fácil implementación.
La etapa de modulación se diseño para funcionar con el LM566, el cual es un
Oscilador Controlado por Voltaje (VCO). Cuenta con la ventaja de que su diseño es
bastante sencillo, su única dificultad es que debe tomarse muy en cuenta el valor real
de los componentes pues cualquier variación en los valores de estos se verá reflejado
en las frecuencias producidas por el VCO. Para esto se hizo uso de trimmers en lugar
39
de resistencias dado que los trimmer permiten compensar en forma fina cualquier
desajuste en los tonos que debe dar a la salida el VCO.
En el caso de los demoduladores se decidió utilizar el LM565 tal y como se recomienda en [5]. El LM565 es un PLL monolítico en el cual la frecuencia de oscilación libre alcanza los 500kHz. Tal y como lo indican las hojas del fabricante de este
dispositivo, el LM565 puede ser utilizado directamente como demodulador de FM y
FSK. Esto se debe a que se tiene un lazo de realimentación, el cual hace que la frecuencia del VCO trate de seguir la frecuencia de entrada al lazo provocando que el
voltaje del VCO varíe en forma proporcional a la frecuencia, para de este modo poder
recuperar la información contenida en la señal modulada. Sin embargo, dado que el
voltaje de salida del LM565 no es compatible con TTL se requiere del uso de un
comparador de voltaje a la salida del LM565 para que convierta la señal en una señal
con niveles de voltaje de 0V y 5V.
La siguiente etapa es la de radiofrecuencia. Es esta etapa la encargada de convertir la señal obtenida del modulador y multiplicarla hasta una frecuencia apta para
ser transmitida por medio de una antena. Luego, en el circuito receptor, la etapa de
radiofrecuencia es la encargada de percibir la señal y disminuir su frecuencia hasta
niveles en los que la señal pueda ser interpretada por el demodulador.
Tal y como se menciona en [5], una forma de alcanzar los niveles de frecuencia
adecuados para la transmisión es a través de una etapa de multiplicación por medio de
un PLL y un divisor de frecuencias. Sin embargo esto provocaría que los tonos que
representan la marca y el espacio se distancien en forma proporcional al aumento en
la frecuencia. De este modo, tomando las frecuencias que se especificaron anteriormente se sabe que la diferencia entre éstas es de 20kHz entre los cuatro tonos que se
utilizarán para la transmisión de los datos y la frecuencia central es de 40kHz. Si se
deseara aumentar esta frecuencia central hasta los 10MHz se tendría que hacer uso de
un lazo que multiplique la señal 250 veces, provocando un distanciamiento de 5MHz
entre los tonos, haciendo que el ancho de banda sea mayor al permitido para una esta-
40
ción FM. Evidentemente sería aun peor si se tratara de aumentar más la frecuencia de
la señal.
A causa de esto, se optó por una etapa de radiofrecuencia que consta de un sintetizador de frecuencia y un mixer para poder conservar el sistema de modulación que
se diseño. Se sabe que la salida de un mixer produce dos señales con frecuencias que
son la suma y la resta de las frecuencias de las señales de entrada. De este modo si se
tiene dos frecuencias f1 y f2 con una frecuencia central f0, cuando se mezcle con la señal proveniente del sintetizador de frecuencias, la señal de la modulación se eleva al
nivel de RF requerido, pero la diferencia entre f1 y f2 sigue siendo la misma. De este
modo se evita el tener que usar un ancho de banda completamente desproporcionado
como el obtenido con el método mencionado en el párrafo anterior.
El sintetizador de frecuencia consiste de un PLL el cual tiene un divisor de frecuencia en el lazo de realimentación. Por medio de un oscilador local se proporciona
una frecuencia de referencia, la cual se multiplica para lograr una frecuencia fx (ver
figura 3.1) la cual va a depender de las limitaciones de los dispositivos con los que se
cuente.
Una vez conseguida la frecuencia requerida el siguiente paso es aumentar la potencia de la señal para poder excitar la antena y lograr que el sistema tenga un alcance
adecuado. Lo más adecuado para un sistema de comunicación de frecuencias de radio
es el uso de un amplificador clase C por su alta eficiencia.
En el caso de la recepción se planea heterodinar la señal de RF por medio de un
mixer (ver figura 3.2) utilizando el mismo sintetizador de frecuencia utilizado para
aumentar la frecuencia de la señal. Cabe aclarar que los tonos utilizados en esta etapa
de recepción son los correspondientes a la etapa de transmisión de la otra computadora para que se pueda tener dos canales separados y así la comunicación full duplex sea
posible.
Solamente resta ajustar el nivel de voltaje de salida de esta etapa para que sea el
adecuado para conectarlo al demodulador. Con lo mencionado hasta el momento se
41
debe tener un sistema capaz de reconstruir la señal original y de este modo poder
completar la comunicación.
En los siguientes párrafos se describe en forma detallada el diseño de cada etapa
del sistema. El método de diseño que se presenta en las siguientes secciones se basa
en el método presentado en [5].
3.2 Diseño de los Moduladores
Tal y como se dijo anteriormente, la etapa de modulación fue diseñada para el
LM566. El LM566 es un oscilador controlado por voltaje cuyo frecuencia depende
del voltaje que se tenga en la patilla 5 (Modulation Input) del circuito integrado. Trabajar con el LM566 supone las siguientes restricciones de diseño:
•
El voltaje en la patilla 5 debe estar entre 0,75Vcc y Vcc.
•
El voltaje mínimo de Vcc es de 10V.
•
El valor de la resistencia que define la frecuencia del VCO debe estar entre 2kΩ
y 20kΩ.
•
La frecuencia de salida está dada por:
fo =
(
2.4 V + − V 5
R o C oV +
)
(3.2-1)
La anterior es una ecuación proporcionada por el fabricante. De ella puede deducirse que es bastante conveniente que la fuente de alimentación sea lo mas estable
posible pues la frecuencia de salida depende del voltaje de alimentación. El esquema
utilizado es el siguiente:
42
Figura 3.3 Esquema utilizado para el modulador
El transistor a la entrada del circuito se debe a que se requiere de una entrada
compatible con TTL. Anteriormente se dijo que el valor mínimo para Vcc debe ser de
10V y que el voltaje en la patilla 5 debe estar entre 0,75Vcc y Vcc, o sea, entre 7,5V y
10V.
Por medio del transistor se logra variar el voltaje en la patilla 5 del dispositivo
mediante el corte y la saturación del transistor controlado por medio del voltaje TTL
de la señal moduladora. Con respecto a la señal de entrada se debe analizar dos casos:
el comportamiento del circuito: cuando la señal moduladora tiene un valor de 0V y
cuando tiene el valor de 5V.Cuando la señal moduladora tiene el valor de 0V el transistor se encuentra en corte, por lo que no conduce corriente y se desconecta la resistencia Rx. Dada esta condición el voltaje en la patilla 5 será la división de voltaje
entre R1 y R2, este voltaje es el que debe dar el tono de frecuencia más baja. Cuando
la señal moduladora tiene un valor de 5V se forma el paralelo entre la resistencia R2 y
Rx, haciendo que el voltaje en la patilla 5 disminuya y de este modo aumente la frecuencia de la señal de salida de acuerdo a la ecuación (3.2-1), produciendo el segundo
tono.
43
Esta es la forma en la que funciona el modulador, ahora se debe proceder a determinar los valores de los elementos externos que consiguen los valores de frecuencia de salida deseados.
3.2.1
Método de Diseño
A continuación se presenta el diseño realizado para el modulador que funciona
con tonos de 30kHz y 50kHz. El diseño está basado principalmente en el método expuesto en [5] con ligeras alteraciones con el propósito de diseñar un circuito más pequeño y económico.
Dado que en la patilla 5 del LM566 el voltaje mínimo es de 0.75Vcc, a partir de
la ecuación (3.2-1), tomando fo=50kHz y Vcc=10V se obtiene:
Ro C o =
2,4(10 − 7,5)
50e3 ⋅ 10
RoCo = 12e − 6
(3.2-2)
(3.2-3)
Se definió Ro=2,2kΩ, el cual es un valor de resistencia que cumple con la restricción impuesta anteriormente. En ese caso, de la ecuación (3.2-3) se puede determinar el valor de Co el cual es Co=5,45nF. El valor comercial más cercano a este valor
es el de 5,6nF.
Seguidamente se define una resistencia R2’ la cual corresponde a la resistencia
equivalente del paralelo entre Rx y R2. Es necesario que el voltaje en R2’ sea 0,75Vcc,
o sea, 7,5V, por lo tanto, haciendo uso de un divisor de tensión se tiene que:
7,5 =
R2 '
⋅ 10
R1 + R2 '
(3.2-4)
Despejando se obtiene la siguiente relación entre R2’ y R1:
R2 ' = 3R1
(3.2-5)
Dado que la impedancia de entrada en el LM566 típicamente es de 1MΩ, se
despreciará la corriente de entrada. Permitiendo una corriente de 1mA a través de R1
se obtiene lo siguiente:
44
10V = (4 R1 ) ⋅ (1x10 −3 A)
(3.2-6)
De la anterior ecuación se obtiene que R1=2,5kΩ y por lo tanto R2’=7,5kΩ. El
valor para R1 se implementó colocando en serie una resistencia de 2,4kΩ y una de
100Ω.
Seguidamente, para una frecuencia de 30kHz:
30 x10 3 =
2,4(10 − V5 )
12 x10 − 6 ⋅ 10
(3.2-7)
Por lo tanto V5=8,5V.
Ahora se debe encontrar el valor de resistencia que proporcionará ese voltaje en
la patilla 5 del LM566:
8,5 =
R2
⋅ 10
R1 + R2
(3.2-8)
Lo cual implica que R2 debe tener un valor de 14,17kΩ. Este valor se implementó por medio de una resistencia fija de 12kΩ en serie con un potenciómetro de 10kΩ
entre sus patillas externas, el cual fue utilizado para alcanzar con mayor precisión el
valor de 14,17kΩ requerido.
Por otro lado, R2’ es el equivalente del paralelo entre Rx y R2, por lo que ahora
puede ser encontrado el valor de Rx:
7,5 x10 3 =
14,17 x10 3 ⋅ R x
14,17 x10 3 + R x
(3.2-9)
De la ecuación (3.2-9) se obtiene que Rx=15,93kΩ.
En la figura 3.4 se muestra el esquemático de la etapa de modulación con los
respectivos valores calculados para cada uno de los elementos pasivos.
45
+10 VDC
R1
Ro
2.2k
U1
R1
2.4k
5
C
7
6
1n
MOD
TCAP
TRES
VCC
GND
8
100
SQWOUT
TRWOUT
LM566C
3
Mod_out
4
Salida
Modulada
Rx
1
100k
R2
Co
5.6n
100k
R1
Q1
Demod_in
2N2222A
Señal de
entrada
4.7k
Figura 3.4 Esquemático para el modulador de la computadora 1
El método de diseño para el segundo modulador es exactamente el mismo que
se siguió para el modulador que se conecta a la computadora 1, sin embargo se debe
recordar que los tonos que se tiene a la salida del modulador de la computadora 2 son
de 70kHz para representar un cero lógico y de 90kHz para representar un uno lógico.
El esquema para el modulador de la computadora 2 se presenta a continuación.
+10 VDC
R1
Ro
2.2k
U1
R1
2.4k
5
C
7
6
1n
MOD
TCAP
TRES
VCC
GND
8
100
SQWOUT
TRWOUT
LM566C
3
Mod_out
4
Salida
Modulada
Rx
R2
1
100k
Co
3.3n
100k
R1
Q1
Demod_in
2N2222A
Señal de
entrada
4.7k
Figura 3.5 Esquemático para el modulador de la computadora 2
46
Como puede observarse, físicamente la única diferencia entre ambos moduladores es el capacitor C0 el cual tiene un valor de 3.3nF para el modulador de la computadora 2 a diferencia del modulador de la computadora 1 el cual tenía un valor de
5,6nF. Sin embargo la mayor diferencia entre ambos moduladores radica en el ajuste
que se hace a los potenciómetros, los cuales son los que determinan la frecuencia de
los tonos de cada modulador.
3.3 Diseño de los demoduladores
Tal y como se aconseja en [5] se construyó un demodulador tipo “FM Detector”,
el cual trata la señal FSK como una señal FM con modulación binaria. La señal es detectada como una señal FM para producir una salida positiva para una condición de
marca y una salida negativa para una condición de espacio. El demodulador consta de
un PLL monolítico (LM565) y del comparador LM311 para tomar la señal modulada
y convertirla nuevamente en una señal compatible con TTL.
3.3.1
Método de Diseño
La frecuencia central del LM565 se define mediante una resistencia y un capacitor externos, tal y como se nota en la ecuación (3.3-1):
fo =
0,3
Ro C o
(3.3-1)
La frecuencia central del demodulador de la computadora 2 debe ser de 40kHz
debido a que esta es la frecuencia central que recibe del modulador de la computadora
1. Tomando en cuenta esto y definiendo Co=1nF puede determinarse por medio de la
ecuación (3.3-1) que el valor para Ro debe ser de 7,5kΩ. Dicho valor de resistencia se
implementó por medio de un potenciómetro de 10kΩ para poder hacer un ajuste preciso de los 7,5kΩ requeridos.
47
Se elije Rx con un valor de 10kΩ para limitar el intervalo de seguimiento del
PLL a un ±50% de la frecuencia central, tal y como se indica en las hojas del fabricante del LM565.
Así que:
f l max = 1,5 f o = 60kHz
f l min = 0,5 f o = 20kHz
∆f l = 40kHz
(3.3-2)
Se define la máxima frecuencia del intervalo de captura del PLL en 55kHz, de
este modo:
∆f c
= 55kHz − 40kHz = 15kHz
2
∆f c = 30kHz
La figura 3.6 muestra la forma en la que se relacionan estos valores:
Figura 3.6 Ámbitos de captura y de seguimiento de un PLL
(3.3-3)
48
El único aspecto que queda pendiente para ser diseñado es el filtro del PLL. En
las hojas del fabricante se indica que para obtener un ancho de banda de lazo cerrado
amplio, lo cual resulta útil para la demodulación, se debe utilizar un filtro de un polo.
Sabiendo esto ahora se tiene que:
ω1 =
(∆ωc )2
2∆ωl
(3.3-4)
1
R1C1
(3.3-5)
Con
ω1 =
Donde R1 es una resistencia interna del LM565 la cual según las hojas del fabricante tiene un valor de 3,6kΩ.
Igualando (3.3-4) y (3.3-5) y despejando C1 se puede obtener el valor requerido
para C1 tal y como se muestra a continuación:
C1 =
(
2 ⋅ 2π ⋅ 40 x10 3
3
(
)
3,6 x10 ⋅ 2π ⋅ 30 x10 3
)
2
(3.3-6)
C1 = 3,9nF
Se debe colocar a la entrada del LM565 un acoplador AC-DC, el cual será conformado por un capacitor de 4,7µF y dos resistencias de 680Ω.
Es importante hacer notar que la salida del LM565 (pin 7) no está referenciada
con respecto a tierra sino que es una salida diferenciada, la cual tiene como referencia
el voltaje del pin 6. Cuando la frecuencia es menor que la frecuencia del VCO, la salida diferencial es positiva. Por el contrario, si la frecuencia es mayor que la del VCO
entonces la frecuencia diferencial es negativa. Este comportamiento es precisamente
el que se desea para poder demodular la señal, sin embargo se requiere que esta señal
demodulada sea compatible con TTL.
Es en este punto donde entra en juego el comparador LM311, el cual recibirá en
sus entradas las señales de las patillas 6 y 7 del LM565. Como se mencionó en el párrafo anterior el voltaje entre las patillas 6 y 7 del LM565 toma valores de voltaje po-
49
sitivos y negativos dependiendo de la frecuencia que reciba en su entrada. El papel
que cumple el LM311 es el de llevar estos valores de voltaje a niveles de 0V y 5V.
Se presenta en la figura siguiente el esquema del circuito de la etapa de demodulación de los tonos de 30kHz y 50kHz. Como puede verse consta de dos subetapas. La
primera de ellas es la del LM565 y le corresponde convertir los tonos de frecuencia en
niveles de voltaje positivos negativos. La segunda es la del LM311 y le corresponde
llevar esos niveles de voltaje positivos y negativos a valores de 0V y 5V.
+5 VDC
4.7u
8
5
V+
B
+
B/S
OUT
1.5n
Rx
REF
TCAP
TRES
7
1k
U6
2
IN1
IN2
6
9
8
680
VOUT
4
3
10k
-
V-
VIN
2
3
Mod_in
Señal Modulada
3.9n
C1
U5
5
G
6
7
Demod_out
1
Señal Demodulada
LM311
4
Ro
VCON
10
1
+VCC
-VCC
LM565
680
Co
1n
-5 VDC
Figura 3.7 Esquema del demodulador de tonos 30kHz y 50kHz
Para diseñar el demodulador para los tonos de 70kHz y 90kHz se debe seguir el
mismo procedimiento pero haciendo los cambios pertinentes en los parámetros del
circuito:
fo=80kHz; ∆fL=64kHz; ∆fc=30kHz; Ro=3.41kΩ
+5 VDC
2
3
Mod_in
4.7u
REF
TCAP
TRES
7
+
8
5
U6
2
B/S
OUT
1.5n
Rx
4.7k
3
-
G
6
7
Demod_out
1
Señal Demodulada
LM311
VCON
10
1
680
1k
4
IN1
IN2
6
9
8
680
VOUT
V+
B
VIN
V-
5
Señal Modulada
5.6n
C1
U5
4
Ro
+VCC
-VCC
LM565
Co
1n
-5 VDC
Figura 3.8 Esquema del demodulador de tonos 70kHz y 90kHz
50
Como puede verse en las figuras 3.7 y 3.8 el valor de Ro se aproxima por medio
de un potenciómetro lo cual da la ventaja de que puede ajustarse el valor de resistencia requerido en forma más exacta además de que permite que se le puedan realizar
ajustes al demodulador para obtener una recepción óptima.
3.4 Simulación FSK
Se muestra a continuación dos simulaciones de la modulación FSK realizada en
MATLAB® en la que se muestra claramente la forma en la que se comportan las señales en este tipo de modulación. El código de dichas simulaciones se adjunta en los
anexos.
Señal Moduladora
4
2
0
0
0.05
0.1
0.15
0.1
0.15
0.1
0.15
Tiempo
Señal Modulada
1
0
-1
0
0.05
Tiempo
Señal Portadora
1
0
-1
0
0.05
Tiempo
Figura 3.9 Simulación modulación FSK
51
Por medio de la figura 3.9, correspondiente a la primera simulación puede apreciarse la forma en la que cambia la frecuencia de la señal modulada en forma dependiente de la amplitud de la señal moduladora, que para este caso tiene amplitudes de
0V y 5V dependiendo de que se esté enviando un cero o un uno respectivamente. Nótese que la amplitud de la señal modulada es constante y que además no se da un
cambio de fase cuando la modulada cambia su frecuencia, o sea, no se producen saltos o discontinuidades en la señal modulada en el momento que cambia su frecuencia,
tal y como es característico en una señal FSK. La figura 3.10 muestra el espectro de
frecuencias tanto de la señal moduladora como de la modulada.
Espectro de la moduladora
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
-1000
-800
-600
-400
-200
0
Frecuencia
200
400
600
800
1000
200
400
600
800
1000
Espectro de la modulada
0.06
0.05
0.04
0.03
0.02
0.01
0
-1000
-800
-600
-400
-200
0
Frecuencia
Figura 3.10 Espectro de frecuencias de la señal moduladora y de la señal
modulada
El espectro de frecuencia de la moduladora muestra la forma típica para una señal cuadrada el la que la mayor amplitud se da en la frecuencia fundamental de la onda cuadrada de 10Hz con picos en las frecuencias que son múltiplos impares de la
52
fundamental que van disminuyendo de amplitud conforme va aumentando la frecuencia, tal y como se muestra en la imagen ampliada de la figura 3.11.
Espectro de la moduladora
0.5
0.4
0.3
0.2
0.1
0
20
40
60
80
100
Frecuencia
120
140
160
180
200
Espectro de la modulada
0.05
0.04
0.03
0.02
0.01
0
50
100
150
Frecuencia
200
250
300
Figura 3.11 Ampliación del espectro de frecuencias de la figura 3.10
Con respecto a la señal modulada cabe mencionar que muestra dos picos pronunciados que precisamente corresponden a las frecuencias de 75Hz y 175Hz las cuales son las frecuencias que muestra la señal modulada FSK en la figura 3.11. Además
se debe resaltar que permanecen presentes los picos a frecuencias que son múltiplos
impares de la frecuencia de la moduladora (10Hz).
La segunda simulación muestra tanto la etapa de modulación como la etapa de
demodulación y se incluye un factor que no se había tomado en cuenta pero que se
encuentra presente en mayor o menor medida en prácticamente todos los circuitos
53
electrónicos, este es el ruido. En esta simulación se asume que el ruido es ruido gaussiano.
En la figura 3.12 se muestra la etapa de modulación de la señal, tal y como se
había mostrado en la primera simulación. Nótese la variación de frecuencias de la señal modulada en forma dependiente del valor de la señal moduladora. Además la señal con ruido muestra la señal tal y como se le ve cuando se mide directamente del
circuito utilizando aparatos de medición como el osciloscopio.
Señal Moduladora
2
1
0
-1
-2
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
Tiempo (s)
Señal Modulada
0.04
0.06
0.08
0.1
-0.08
-0.06
-0.04
-0.02
0.04
0.06
0.08
0.1
-0.08
-0.06
-0.04
0.04
0.06
0.08
0.1
2
1
0
-1
-2
-0.1
0
0.02
Tiempo (s)
Señal Modulada con Ruido
2
1
0
-1
-2
-0.1
-0.02
0
0.02
Tiempo (s)
Figura 3.12 Modulación FSK de la señal
La figura 3.13 muestra el espectro de frecuencias tanto de la señal moduladora
como de la señal modulada. Al igual que en la primera simulación, el espectro de la
señal moduladora está compuesto por una frecuencia fundamental y las frecuencias
que son múltiplo de la fundamental, o sea, las armónicas. Del mismo modo, la señal
54
modulada presenta dos frecuencias fundamentales las cuales corresponden a las dos
frecuencias a las que trabaja la señal FSK, además se encuentran presentes frecuencias armónicas de ambas fundamentales.
Espectro de frecuencia de la moduladora
0.1
0.05
0
-1000
-800
-600
-400
-200
0
200
Frecuencia (Hz)
400
600
800
1000
Espectro de frecuencia de la modulada
0.05
0.04
0.03
0.02
0.01
-500
-400
-300
-200
-100
0
100
Frecuencia (Hz)
200
300
400
500
Figura 3.13 Espectro de frecuencias de la señal moduladora y de la señal
modulada
Se muestra en la figura 3.14 la fase de demodulación de la señal transmitida, en
la cual se regenera la señal moduladora, la cual es cuadrada, a partir de la señal modulada. Como puede verse la demodulación no es perfecta pues no se regenera una señal
idéntica a la transmitida en un principio. Además debe agregarse a esto que las señales, en los sistemas reales, siempre presentan ruido en mayor o menor medida. En este
caso se ha puesto como ejemplo una señal con una relación señal a ruido de 15dB.
55
Señal moduladora
2
1
0
-1
-2
-0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
Tiempo (s)
Señal demodulada
0.04
0.06
0.08
0.1
-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
Tiempo (s)
Señal demodulada con Ruido
0.06
0.08
0.1
-0.08
-0.06
-0.04
0.06
0.08
0.1
2
1
0
-1
-2
-0.1
2
1
0
-1
-2
-0.1
-0.02
0
0.02
Tiempo (s)
0.04
Figura 3.14 Señal moduladora en contraste con las señales demoduladas
(con y sin ruido)
3.5 Investigación referente a equipo de radiofrecuencia
Queda por diseñar la etapa de radiofrecuencia, de la cual se escribe en los siguientes renglones. Sin embargo en nuestro país resulta bastante difícil conseguir
componentes electrónicos de radiofrecuencia debido a que se trata de un mercado bastante reducido, por lo que se vuelve difícil la implementación de sistemas de comunicación. Las tiendas de componentes electrónicos del país se limitan a importar sólo
dispositivos de reemplazo básicos, limitando las posibilidades de construcción de sistemas de este tipo.
56
Por esta razón resultó prácticamente imposible la construcción de la etapa de radiofrecuencia que se había propuesto en un principio. Sin embargo, se muestran más
adelante algunos esquemas y circuitos integrados que normalmente se utilizan en los
equipos de comunicación con el fin primordial de orientar a los estudiantes que en un
futuro tengan la intensión de continuar con este proyecto o con algún otro proyecto en
el que les resulte necesario construir algún sistema de radiofrecuencia.
3.5.1
Sintetizador de frecuencias
Tal y como se recomienda en [5], el sintetizador de frecuencias MC145152-2 de
Freescale (empresa que actualmente comercializa los dispositivos semiconductores de
Motorota), es una buena opción para la etapa de radiofrecuencia de este proyecto. El
sintetizador consta de dos divisores de frecuencia los cuales se programan por medio
de interruptores conectados a sus pines. El dispositivo cuenta con un oscilador interno
con lo cual es suficiente para una aplicación como esta. Sin embargo cuenta con la
opción de conexión de un oscilador externo. En la figura 3.15 se muestra el diagrama
de bloques del MC145152-2.
Figura 3.15 Diagrama de bloques del ML145152
Normalmente un sintetizador de frecuencia contempla tanto un divisor de frecuencia para el oscilador de referencia como para la señal proveniente del VCO. Sin
57
embargo, en el caso del MC145152-2 se cuenta con un divisor de frecuenta adicional.
Esto se debe a que el dispositivo está contemplado para utilizar un prescaler (un divisor de frecuencia externo) entre el VCO y la realimentación, tal y como se muestra en
la figura 3.16, el cual tiene la función de aumentar la frecuencia de la señal de salida,
pues la frecuencia máxima que puede dar el MC145152-2 por si solo es de aproximadamente 22MHz, con una señal realimentada de 1Vpp y con una alimentación de 5V.
Figura 3.16 Esquema con lazo de realimentación del ML145152, el VCO y
el prescaler ML12017
Dependiendo del valor por el que divida este prescaler, así se diseña el valor total por el que se divide la frecuencia de salida. Es evidente en este punto que el VCO
es parte esencial en el sistema, y en buena parte es el responsable de que se puedan
alcanzar frecuencias en el orden de los MHz.
Una gran ventaja que tienen los sintetizadores de frecuencias basados en PLL es
que son capaces de dar una gran cantidad de magnitudes de frecuencia distintas dependiendo de las necesidades del sistema, a diferencia de otros sistemas que necesitarían un banco de cristales para poder realizar esta función. Esto lo logra a través de los
divisores de frecuencia con que cuenta el circuito. Evidentemente esta ventaja se traduce en que se tendrá un diseño más simple y seguramente más económico debido al
costo que significaría un banco de cristales.
58
La frecuencia de salida del sintetizador vendría dado por:
FSalida =
N
⋅ Freferencia
R
(3.5-1)
Donde N es el valor programado en el divisor de lazo y R es el valor programado para el divisor de referencia. Con R se define el ancho del paso en frecuencia,
mientras que con N se selecciona el canal deseado. En el caso de nuestro circuito, R
debería ser de al menos 100kHz, dado que en ese ámbito se encuentran los cuatro tonos con los que funcionan los moduladores y los demoduladores. Si por ejemplo se
cuenta con un cristal de 16 MHz se tiene que
R=
16 MHz
= 160
100kHz
(3.5-2)
Sin embargo 160 no es un valor valido para el divisor de frecuencias de R por lo
que resultaría conveniente utilizar R=128, con lo cual se tendrían pasos de 125kHz. Si
se desea que la frecuencia más baja sea de 15MHz, entonces, utilizando la ecuación
(3.5-1) se deduce que N=120. Este valor de 120 debe introducirse en forma binaria
(0001111000) en los pines N9,…,N0 donde N0 es el pin con el valor menos significativo. Si se definen 8 canales posibles, cada uno de ellos tendría un código binario distinto tal y como se muestra en la tabla 3.1. Para cambiar a otro canal de transmisión
basta con alterar los bits menos significativos (N2, N1, N0).
59
Tabla 3.1 Canales del Sintetizador. Tomado de [5]
Código de N
Frecuencia
(N9, N8,…,N0)
(MHz)
1
0001111000
15,000
2
0001111001
15,125
3
0001111010
15,250
4
0001111011
15,375
5
0001111100
15,500
6
0001111101
15,625
7
0001111110
15,750
8
0001111111
15,875
Canal
El siguiente punto corresponde a elegir un prescaler y un VCO adecuados. Aunque el MC145152-2 puede funcionar perfectamente como sintetizador de frecuencias
en nuestro circuito sin necesidad de utilizar el prescaler ni el VCO, resulta realmente
importante su uso por motivos meramente prácticos. Para demostrarlo debemos hacer
uso de la siguiente ecuación:
c
=λ
F
(3.5-3)
Donde c=3x108m/s es la velocidad de las ondas electromagnéticas en el aire, F
es la frecuencia de la señal y λ es la longitud de onda de la señal. Si usamos la ecuación (3.5-3) para determinar λ de una señal que emite a 15MHz, tal y como en el
ejemplo anterior, resulta que λ=20m. Supóngase que por ejemplo la antena utilizada
para emitir la señal fuera una antena bipolar. Tal y como se observa en la nota teórica
sobre antenas, normalmente una antena bipolar tiene la longitud de λ/2 longitudes de
onda, por lo que para este caso se necesitaría de una antena de 10m de longitud para
poder emitir la señal, lo cual resulta muy poco práctico por lo que se debe aumentar la
frecuencia de la señal emitida para poder hacer uso de una antena con un tamaño más
60
adecuado. Si se cuenta con un prescaler que permita aumentar la frecuencia del sintetizador de frecuencias en un factor de 32 ya no se emitiría a 15MHz sino a 480MHz
por lo que al utilizar la ecuación (3.5-3) resultaría que λ=0,625m y la antena necesaria
para transmitir a esa frecuencia sería de solamente de 0,313m, lo cual evidentemente
es más práctico que una antena de 10m.
Como se muestra en la figura 3.16 se recomienda utilizar un prescaler de la familia ML1201x como lo es el ML12017. Esta familia de prescaler son totalmente
compatibles con el MC145152-2 por lo que con esto se superaría el problema indicado en [5] con respecto al uso de un prescaler compatible con dicho circuito integrado.
El divisor de frecuencia del ML12017 puede dividir frecuencias entre 64 y 65. Tiene
la ventaja de que cuanta con un regulador de voltaje interno, por lo cual puede ser conectado a fuentes de alimentación desde los 4,5V hasta los 9,5V.
Figura 3.17 Diagrama de Bloques del ML12017
61
Figura 3.18 Diagrama de bloques general mostrando la conexión entre el
prescaler y el PLL
En cuanto al VCO se debe recordar que debido a las frecuencias con las que se
pretende trabajar no se puede utilizar cualquier tipo de VCO sino que debe ser apto
para radiofrecuencias. En [5] se intentó diseñar un VCO Clapp-Gouriet en forma discreta lo cual es difícil, incomodo y con bastantes posibilidades de que se falle en el intento debido a que se tuvo que lidiar con el diseño y construcción del inductor del
VCO. Sería bastante más cómodo trabajar con un VCO que tenga todos sus componentes en un solo encapsulado. Como ejemplo se podría mencionar los VCO que fabrica la empresa Spectrum Microwave la cual se dedica a construir componentes
electrónicos para circuitos de radiofrecuencia. Si se utilizara un prescaler como el
ML12017 con el cual se obtendría una frecuencia de transmisión de 480MHz sería
conveniente utilizar un VCO como el TOM9321, el cual se encuentra diseñado para
trabajar en frecuencias entre los 400MHz y los 500MHz. Tiene la ventaja de que usa
transistores bipolares por lo que pueden dar una potencia de salida más alta, por otro
62
lado, internamente cuenta con un filtro pasabajos el cual limita las armónicas; además
cuenta con termistores para controlar la temperatura. Pero tal vez la ventaja más importante puede notarse en la figura 3.19 y es que se trata de un dispositivo que ocupa
un espacio bastante menor que un VCO Clapp-Gouriet construido en forma discreta.
Figura 3.19 Encapsulado del TOM9321
3.5.2
MAX1471
Un dispositivo que podría resultar interesante para el diseño de la etapa de recepción de radiofrecuencia es el MAX1471 el cual es un receptor superheterodino que
demodula señales tanto en ASK como FSK. Este dispositivo requiere de pocos componentes externos para poder realizar una recepción de radiofrecuencia de datos digitales para las bandas de 315MHz y 434MHz. El circuito integrado incluye todos los
componentes activos requeridos por un receptor superheterodino: amplificador de bajo ruido (LNA), mixer con rechazo de imagen, PLL, oscilador local de 10,7MHz,
RSSI (Received Signal Strength Indication), demodulador FM de bajo ruido y un regulador de voltaje de 3V.
63
3.5.3
RTFQ1 y RRFQ1
Existen dispositivos electrónicos más complejos los cuales son sistemas completos de comunicación por lo que resultan muy útiles en proyectos donde la etapa de
comunicación es apenas una pequeña parte del proyecto. Tal es el caso de los dispositivos RTFQ1 y RRFQ1, los cuales son módulos de transmisión de radiofrecuencia;
uno es el emisor y el otro es el receptor. Este par de dispositivos son capaces de lograr
enlaces de hasta 40kbit/s a distancias de 75m en interiores y hasta 300m en lugares
abiertos
Figura 3.20 Emisor RTFQ1 (arriba) y receptor RRFQ1
El transmisor es un transmisor FSK con oscilador de cristal. El RTFQ1 es un
circuito híbrido el cual permite realizar una transmisión de radio completa. Se encuentra disponible tanto para 315MHz como para 433MHz.
64
Figura 3.21 Diagrama de bloques del RTFQ1
El diagrama de bloques del transmisor (RTFQ1) muestra que se consigue alcanzar radiofrecuencias por medio de un oscilador de cristal. Este se encuentra conectado
a un PLL el cual es el encargado de producir las señales con las frecuencias correspondientes a marca y espacio. Dichas señales posteriormente son amplificadas para
que puedan ser transmitidas por medio de la antena.
Figura 3.22 Diagrama de bloques del RRFQ1
El RRFQ1 tiene la característica de que necesita de solamente una fuente de
alimentación de 5V, además la salida es compatible con CMOS y TTL. Su diagrama
de bloques muestra una estructura similar a la del sistema que se pretendía construir
en el presente proyecto. Consta de un mixer encargado de reducir la frecuencia de la
señal recibida. Seguidamente se tiene un filtro en la etapa de frecuencias intermedias
el cual elimina una de las componentes de la señal que sale del mixer. El siguiente
65
bloque se encarga de la demodulación de la señal y el comparador lleva la señal a niveles de voltaje compatibles con sistemas TTL y CMOS
3.5.4
Wmod9k6
Este dispositivo es un transceptor FSK cuyas funciones son muy similares a lo
que se pretende en este proyecto por lo que se recomienda su uso en proyectos en los
que se necesita la comunicación inalámbrica pero no se desea pasar por todo el proceso de construir todo el circuito que se pretende construir en este proyecto. Algunas
de sus características son las siguientes:
•
Frecuencia: 433.92Mhz / 10mW pra. 5V.
•
Modulación: FSK, 2400 – 9600baudios
•
Salidas: Digital, Analógica, CD (Carrier Detect) y RSSI (Received Signal
Strength Indication)
•
Sensibilidad Típica: –95dBm
•
Excelente relación calidad-precio
•
Dimensiones: 40 x 50 x 5mm
Figura 3.23 Transceptor FSK de 9600baudios
El Wmod9k6 es un módulo transmisor-receptor FSK para datos digitales de
10mW de potencia máxima, que permite conseguir enlaces de hasta 300mts. Dispone
de alimentaciones separadas para el emisor y el transmisor, cuenta con un conmutador
66
de antena incorporado con filtro, en el que el tiempo de arranque del receptor es menor de 2ms.
El receptor es superheterodino de simple conversión, el cual cuenta con preamplificador a la entrada.
Figura 3.24 Diagrama de Bloques del Transceptor FSK de 9600baudios
Como puede observarse en el diagrama de bloques, este dispositivo tiene una estructura muy parecida a la del sistema diseñado en este proyecto en la que se toma la
señal digital y se le modula en frecuencia para poder se transmitida mientras que la
recepción se hace a través de un receptor superheterodino FSK el cual demodula la
señal recibida para regenerar la señal digital nuevamente.
CAPÍTULO 4: Construcción de los circuitos impresos
El capítulo anterior se dedicó al diseño de cada una de las etapas del sistema de
comunicación que se utiliza entre ambas computadoras. Este capítulo se centra en el
diseño del circuito impreso sobre el cual se colocaron y se soldaron todos y cada uno
de los componentes electrónicos elegidos durante la etapa de diseño. Mientras que en
el diseño del sistema se buscaron las topologías de circuitos que mejor cumplían los
objetivos propuestos, así como la escogencia de los componentes que hacen que el
sistema funcione de forma adecuada, en el diseño del circuito impreso se vuelven importantes otros aspectos como lo es el tamaño de cada uno de los componentes así
como la forma en que se encuentran colocadas sus patillas. Esto debido a que el componente debe calzar perfectamente en el espacio que se le reservó en el circuito impreso.
Por lo tanto resulta en extremo importante haber conseguido todos los componentes que se desean utilizar antes de comenzar el diseño del circuito impreso.
Esta etapa de diseño consta básicamente de dos pasos:
•
El primer paso se trata de construir el diagrama del circuito en algún programa
de análisis y diseño de circuitos electrónicos y circuitos integrados tales como
el OrCAD® o el Protel®. Luego debe exportarse este diagrama al programa de
creación del circuito impreso, donde se trazan las pistas del circuito impreso.
En este caso se utilizó el Orcad Family Release 9.2 Lite Edition.
•
Una vez realizado el diseño de las pistas del circuito impreso, el siguiente paso
es imprimir estas pistas sobre una placa virgen de circuito impreso y realizar
los hoyos donde se sueldan los componentes
4.1 Diseño del circuito impreso
Para el diseño del circuito impreso se hizo uso de la herramienta de diseño y
análisis de circuitos electrónicos Orcad en la versión mencionada anteriormente.
El primer paso para el diseño del circuito impreso es la construcción del esquemático del circuito en el programa Capture, el cual forma parte de la versión de Orcad
67
68
mencionada. En la figura 4.1 se visualiza el esquemático para el circuito que se desea
construir. Claramente pueden distinguirse en el las etapas de modulación y demodulación así como la interfaz RS232/TTL.
Figura 4.1 Esquemático utilizado para la construcción del circuito impreso
69
Una vez construido el esquemático lo siguiente es cargar el diseño del Capture
en el Orcad Layout. Para poder hacer esto se debe seguir un proceso de tres pasos:
•
Crear un diseño valido en el Capture con footprints que el Layout soporte
•
Correr el Design Rules Check (Chequeo de reglas de diseño)
•
Por último generar un Netlist en el formato de Layout
Es importante recalcar que cualquier conexión agregada o borrada desde el Layout no será corregida en el Capture. Por lo tanto, cuando se desee hacer una modificación resulta conveniente hacer los cambios en el Capture y enviarlos al Layout.
Para preparar el diseño del Capture para el Layout es necesario primero modificar el diseño, asignando los footprints soportados por el Layout a cada uno de los
componentes. Para realizar esto se debe seleccionar todos los componentes del diseño, hacer clic sobre ellos con el botón secundario y seleccionar Edit Properties… tal y
como se muestra en la figura 4.2
Figura 4.2 Seleccionando la opción Edit Properties…
Esto hará que se abra la ventana Property Editor, en la cual debe seleccionarse
de la parte inferior de la ventana la pestaña llamada Parts. Al hacer esto se tendrá un
listado de todos los componentes presentas en el diseño. Lo que se debe hacer es llenar el espacio PCB Footprint para cada uno de los componentes con footprints com-
70
patibles con el Layout los cuales debes ser escogidos del documento “OrCAD Layout
for Windows Footprint Libraries”. Realizar este paso es indispensable pues los footprints indican la forma o huella que tiene determinado componente en el circuito impreso. Una vez terminado este paso puede cerrarse el Property Editor.
El siguiente paso a seguir es el de correr el Design Rules Check con el fin de revisar si se ha cometido alguna infracción en el diseño que deba ser corregida. Para correrlo debe seleccionarse con un clic el icono del dibujo esquemático en el árbol del
proyecto. Luego se debe seleccionar Design Rules Check del menú Tools que se encuentra en la barra de herramientas.
Figura 4.3 Árbol del proyecto
Después de que se ha revisado el diseño con el Design Rules Check debe crearse
el Netlist que será utilizado en el Layout. Para esto se debe realizar lo siguiente:
•
En el árbol del proyecto haga clic en el archivo con extensión .dsn
•
En el menú Tools escoja Create Netlist. Esto abrirá una ventana en la cual debe escogerse la etiqueta Layout
•
En PCB Footprint, asegúrese que en la ventana de texto Combined property string
aparece{PCB Footprint}
71
•
En la ventana de texto Netlist File, asegúrese de que la trayectoria del archivo Netlist es la correcta. El Netlist toma el nombre del diseño hecho en el Capture pero
con la extensión .mnl
•
Haga clic en OK para crear el archivo Netlist en la carpeta especificada.
Figura 4.4 Ventana Create Netlist
Una vez que se ha creado el Netlist se procede a trabajar en el Orcad Layout, el
cual es el que permite trabajar directamente en el diseño de las pistas del circuito impreso pues permite crear los contornos de los componentes y los cables que los unen.
Al trabajar con el Layout, lo primero que debe realizarse es el diseño de la plantilla sobre la cual se hará el diseño del circuito impreso. En la plantilla se definen aspectos importantes como el espaciamiento entre las pistas, el espaciamiento de la
72
grilla, el número de capas del circuito, entre otras. El proceso para crear la plantilla no
se explica en el presente documento pero se trata ampliamente ese tema en [2].
Al abrir por primera vez el Netlist en el Orcad Layout se verá que los componentes tienen muchas líneas finas conocidas como ratsnest que los conectan unos con
otros representando conexiones no ruteadas, tal y como se ve en la figura 4.5.
Figura 4.5 Imagen del circuito después de abrir el Netlist en el Layout
Existen dos opciones para realizar el ruteo del circuito: en forma manual o automática. El método utilizado en este proyecto fue el de ruteo automático debido a la
velocidad y simpleza con la que se hace el ruteo.
El ruteo automático es bastante más rápido, sin embargo, al finalizar el ruteo automático deben revisarse detalles como:
•
Que no haya cruces entre pistas en una misma capa, pues esto crearía un cortocircuito.
•
Que la máquina no haya forzado mucho una pista de ruteo y ésta haya quedado
hecha a 90º lo cual no está permitido en un circuito integrado.
73
Todos estos errores deben corregirse después del ruteo automático mediante el
uso de la herramienta de ruteo manual.
Para realizar el ruteo automático se selecciona la opción New del menú File.
Luego se debe buscar el archivo con la extensión .tpl que corresponde a la plantilla
creada para el proyecto. El programa le solicitará el archivo Netlist por lo cual debe
buscarse el Netlist que anteriormente fue creado en el Capture. Una vez hecho esto
aparecerán en pantalla todos los componentes del circuito interconectados por medio
de los ratsnest, tal y como se muestra en la figura 4.5.
El siguiente paso corresponde a acomodar los componentes dentro de los límites
establecidos para el circuito impreso de forma que la posición que se le de a los componentes facilite el ruteo en lugar de complicarlo. Por ejemplo se recomienda que
componentes que se encuentran interconectados se coloquen cerca unos de otros,
puesto que si se colocaran en lugares opuestos del circuito impreso deberán crearse
rutas que atraviesen todo el circuito con tal de que dichos componentes queden conectados. En el caso del circuito impreso creado se dividió la tarjeta impresa en tres partes en las cuales se colocaron los componentes correspondientes a cada una de las
etapas (modulador, demodulador e interfaz).
Una vez colocados los componentes se procede al ruteo de las pistas. El ruteo se
realiza de la siguiente forma: en el menú Auto se debe seleccionar la opción Autoroute
y seguidamente la opción Board. Esto hará que el Orcad Layout comience a rutear en
forma automática las pistas eligiendo los mejores caminos para cada pista dependiendo de la cantidad de capas del circuito impreso, del grosor de las pistas, del espaciamiento entre pistas entre otras propiedades que se fijaron cuando se creó la plantilla
del circuito impreso. En este proyecto se utilizo un ruteo de una única capa (capa inferior o BOTTOM) donde el grosor de las pistas es de 24mils y el espacio entre las pistas es de 18mils. El resultado es representado en la figura 4.6 donde se observan los
componentes unidos entre sí por las pistas creadas por el ruteo automático.
74
Figura 4.6 Resultado del Ruteo. Vista de pistas y componentes
En la creación de un circuito impreso se manejan gran cantidad de capas, entre
ellas las de pistas, las de los componentes, las de los hoyos de taladrado entre otras.
Muchas de ellas se mantienen inhabilitadas como por ejemplo las de ruteo de la capa
superior y ruteo de las capas internas (debido a que se utilizó solamente la cara inferior para hacer el ruteo). Para poder imprimir las pistas sobre la placa de cobre y poder imprimir la capa en la que se muestra la ubicación de los componentes se puede
exportar la información de las capas a un archivo que pueda ser leído por el programa
AutoCAD®. Para esto se deben seguir los siguientes pasos:
•
Del menú Options seleccionar la opción Post Process Settings… Esto abre una ventana donde se muestran podas las capas del proyecto con algunas de sus propiedades.
•
Seguidamente se debe seleccionar la capa que se quiere exportar y hacer clic secundario sobre ella. Seleccione la opción Preview, con esto aparecerá en pantalla únicamente la capa seleccionada.
75
•
Haga clic en File y seguidamente en Print/Plot. De este modo aparecerá la ventana
de la figura 4.7. En ella se permite guardar la capa como un archivo con extensión
.dxf, los cuales son archivos que pueden ser leídos y modificados por el AutoCAD®.
•
Se debe repetir el proceso para cada capa del proyecto que resulte de interés. Para el
caso de este proyecto resulta importante efectuar este proceso para la capa
BOTTOM, la cual contiene las pistas del circuito impreso; es importante también la
capa *.AST la cual contiene la información sobre la posición de los componentes.
Figura 4.7 Ventana de impresión del Orcad Layout
La gran ventaja de tener la información de las capas como archivos que pueden
ser modificados en AutoCAD® es que se pueden hacer modificaciones que por algún
motivo no se pudieron hacer en el Orcad Layout. En los anexos se muestra una impresión de las capas utilizadas en el proyecto, cada una de ellas en su versión final y definitiva.
76
4.2 Construcción de los circuitos y montaje de los componentes
Una vez que se tiene completo el diseño de las pistas del circuito impreso se
procede a la impresión de las pistas sobre la placa de cobre. Este paso se realizó gracias a la ayuda del LECI (Laboratorio de Electrónica y Circuitos Impresos del ICE) y
en especial gracias a la ayuda de don Gerardo Herrera quien personalmente fabricó
los circuitos impresos, los cuales se muestran el la figura 4.8.
Figura 4.8 Circuitos impresos fabricados en el LECI
El paso restante es el de soldar los componentes electrónicos a los circuitos impresos teniendo cuidado de colocarlos en la posición correcta respetando las polaridades de los capacitores y teniendo cuidado de no colocar los circuitos integrados al
revés. La figura 4.9 muestra la forma en la que se fueron soldando cada uno de los
componentes del circuito.
77
Figura 4.9 Soldadura de los componentes
Por último se muestra la fotografía de los circuitos una vez que se les ha terminado de soldar los componentes.
Figura 4.10 Circuito de transmisión y recepción terminado
78
Una vez terminado el circuito lo que corresponde es probar su buen funcionamiento y hacerle pruebas de desempeño, pero de esto se hablará en el siguiente capítulo.
CAPÍTULO 5: Pruebas de Laboratorio
Una vez diseñado el circuito y la tarjeta impresa se procedió a la fabricación de
la tarjeta y al ensamble de las distintas partes. El primer paso antes de poner a funcionar el sistema es el de calibración de las distintas etapas a través de los potenciómetros que se incluyeron en el diseño del circuito. Seguidamente se procedió a poner a
funcionar los circuitos y a efectuarles pruebas, mediciones y capturas de imágenes tal
y como se detalla a continuación.
5.1 Modulador
En el caso del modulador la calibración se hizo de la siguiente manera:
•
Poniendo una entrada de 0V en la base del transistor se procedió a calibrar el tono de la frecuencia más baja del demodulador por medio del potenciómetro R2
(Ver figura 3.3). Poner una entrada de 0V en la base del transistor se logra poniendo una entrada de entre 5V y 15V en el pin 3 del puerto RS232.
•
Una vez calibrada la frecuencia baja, se procede a calibrar la frecuencia alta. Se
debe colocar un uno (5V) en la base del transistor y se procede a calibrar el potenciómetro Rx hasta alcanzar el valor de frecuencia deseado. Poner una entrada
de 5V en la base del transistor se logra poniendo una entrada de entre -5V y 15V en el pin 3 del puerto RS232
En la figura siguiente se muestra la captura por medio del osciloscopio de la se-
ñal moduladora junto con la señal modulada. Puede verse que el sistema funciona en
forma correcta a una frecuencia de la señal moduladora de 10.41kHz, puesto que para
la frecuencia más baja se obtienen por lo menos dos ciclos de la señal modulada con
una fase continua en todo momento. Esto permite que el programa de comunicación
proy.exe pueda funcionar a una velocidad de 19200 bits por segundo dado que en cada ciclo se pueden transmitir dos bits.
79
80
Figura 5.1 Captura del modulador de 30/50kHz. 1) Señal moduladora, 2)
Señal modulada
Se tomaron las siguientes mediciones:
Tabla 5.1 Datos obtenidos al probar el modulador 30/50kHz
Característica de la señal
Valor de la señal moduladora
modulada
1
0
Frecuencia (kHz)
50,10
30,15
Vpp (V)
6,80
6,80
Característica de la señal
moduladora
Frecuencia (kHz)
10,41
Vpp (V)
20,80
81
Para el caso del segundo modulador se tomo también una captura por medio del
osciloscopio, de la cual se puede obtener los datos que se muestran en la tabla 5.2.
Figura 5.2 Captura del modulador de 70/90kHz. 1) Señal moduladora, 2)
Señal modulada
82
Tabla 5.2 Datos obtenidos al probar el modulador 70/90kHz
Característica de la señal
Valor de la señal moduladora
modulada
1
0
Frecuencia (kHz)
89,29
69,54
Vpp (V)
6,40
6,40
Característica de la señal
moduladora
Frecuencia (kHz)
16,61
Vpp (V)
21,00
Como puede observarse en las figuras 5.1 y 5.2 la señal modulada tiene un voltaje DC, por lo que se requiere de un comparador de voltaje a la salida del modulador
cuyo voltaje umbral sea el valor medio de la señal modulada para así cambiar el nivel
de voltaje y obtener una señal bipolar.
5.2 Demodulador
Una vez que se tiene el demodulador montado sobre el circuito impreso se procede a ajustar la resistencia por medio del potenciómetro hasta obtener una recepción
totalmente satisfactoria.
En la figura 5.3 se muestra el comportamiento del demodulador de frecuencias
de 30/50kHz ante una entrada de 30kHz la cual representa una salida de 0V a la salida del LM311, lo cual es equivalente a un 1 lógico a la salida del MAX232, puesto
que el MAX232 invierte la señal. Se puede deducir de la figura que la demodulación
es correcta. Como se explicó en la sección de diseño del demodulador esto se debe a
que el voltaje de salida del PLL mantiene una polaridad negativa siempre y cuando la
frecuencia a la entrada del PLL sea menor que la frecuencia del VCO.
83
Figura 5.3 Captura del demodulador de 30/50kHz. 1) Señal de entrada al
PLL de 30kHz, 2) salida de un 1 lógico del MAX232
Por el contrario, si el demodulador de 30/50kHz recibe una señal de frecuencia
de 50kHz entonces la frecuencia de entrada al PLL es mayor que la frecuencia del
VCO por lo que el voltaje de salida del PLL mantiene polaridad positiva y el voltaje a
la salida del LM311 es de 5V, lo cual representa una señal de -10V (un cero lógico) a
la salida del MAX232, tal y como lo representa la figura 5.4.
84
Figura 5.4 Captura del demodulador de 30/50kHz. 1) Señal de entrada al
PLL de 50kHz, 2) salida de un 0 lógico del MAX232
Se resume en la tabla 5.3 la información obtenida de las figuras 5.3 y 5.4 y de
los equipos de medición utilizados en el laboratorio.
Tabla 5.3 Datos obtenidos al probar el demodulador 30/50kHz
Valor de la señal demodulada
1
0
Frecuencia (kHz)
30,20
50,17
Vpp (V)
1,00
1,02
Voltaje de salida del LM311 (V)
0
5
Voltaje de salida del MAX232 (V)
10
-10
Características
señal de entrada al
PLL
85
Con respecto al demodulador de frecuencias de 70/90kHz la situación es bastante similar. La figura 5.5 muestra una señal de entrada de 70kHz por lo que se tiene
una salida de 0V del comparador y un voltaje de 10V a la salida del MAX232 por las
razones explicadas anteriormente.
Figura 5.5 Captura del demodulador de 70/90kHz. 1) Señal de entrada al
PLL de 70kHz, 2) salida de un 1 lógico del MAX232
Además, para una señal de entrada de 90kHz la señal a la salida del LM311 es
de 5V por lo que a la salida del MAX232 se obtuvo una señal de -10V, como se observa en la figura 5.6.
86
Figura 5.6 Captura del demodulador de 70/90kHz. 1) Señal de entrada al
PLL de 90kHz, 2) salida de un 0 lógico del MAX232
La tabla 5.4 muestra algunos datos de interés extraídos de las mediciones hechas
al modulador de 70/90kHz.
Tabla 5.4 Datos obtenidos al probar el demodulador 70/90kHz
Valor de la señal demodulada
1
0
Frecuencia (kHz)
69,99
89,47
Vpp (V)
1,02
1,02
Voltaje de salida del LM311 (V)
0
5
Voltaje de salida del MAX232 (V)
10
-10
Características
señal de entrada al
PLL
87
Una vez que se ha construido, ajustado y probado el buen funcionamiento de las
etapas de modulación y de demodulación se procede a probar el sistema en forma
completa. Se conectan las interfases RS232 a las computadoras y se conectan los
MODEM entre sí. En este paso se debe tener un cuidado especial con respecto a la salida del modulador y la entrada del demodulador. Debe quedar claro que los dos circuitos construidos no se diseñaron para ser conectados entre ellos sino que cada uno
de ellos será conectado a las respectivas etapas de radiofrecuencia que serán las que
establezcan la comunicación entre ambos circuitos. En este proyecto se conectaron
ambos circuitos con el fin de comprobar el correcto funcionamiento de ellos, pero teniendo en mente que este no es el producto final al que se quiere llegar. Para poder
hacer la conexión entre ambos circuitos se debe tomar en cuenta que el voltaje de salida de los moduladores es alto comparado con el permitido a la entrada de los demoduladores. Como se vio anteriormente en la figuras 5.1 y 5.2 la salida del modulador
puede ser una señal con niveles de voltaje de hasta 9V pico. Sin embargo, la entrada
del LM565 permite solamente señales con un voltaje diferencial de entrada de ±1V
como máximo. También se dijo anteriormente que para eliminar el nivel DC de la señal modulada era necesario un comparador que convirtiera dicha señal en una señal
bipolar, Por lo que sería necesario el uso de un comparador de voltaje en medio del
modulador y el demodulador para poder acoplarlos satisfactoriamente. Sin embargo
en este caso, dado que lo que realmente importa en la señal que entra al demodulador
es su frecuencia y no tanto su amplitud, además del hecho de que el capacitor que se
encuentra a la entrada del LM565 tiene el objetivo de eliminar el nivel DC a la entrada del circuito integrado, se procedió a hacer un divisor de voltaje entre el modulador
y el demodulador para hacer el acople con tal de que la señal que llega al demodulador tenga un nivel de voltaje lo suficientemente bajo para que no dañe el circuito integrado, pero teniendo en el demodulador la misma frecuencia que salió del
modulador.
88
La figura 5.7 muestra la señal enviada por la computadora 1 y la señal recibida
en la computadora 2. Cabe resaltar que la señal recibida tiene un retardo de aproximadamente 25µs con respecto a la señal enviada lo que representa el tiempo que tardan
los circuitos en procesar la señal, o sea, en realizar la modulación y la demodulación
de la señal.
Figura 5.7 1) Señal enviada por la computadora 1. 2) Señal recibida en la
computadora 2
De igual forma, en el sentido contrario la comunicación presenta el mismo
tiempo de retardo de 25µs lo cual era de esperarse dado que la señal transmitida pasa
exactamente por el mismo proceso.
89
Figura 5.8 1) Señal enviada por la computadora 2. 2) Señal recibida en la
computadora 1
Las capturas expuestas en las figuras 5.7 y 5.8 se realizaron a una frecuencia de
entrada de 10kHz, lo que corresponde a 20kbit/s, por lo que se comprobó lo predicho
anteriormente con respecto a que el sistema funcionaría correctamente a una velocidad de 19200 bits por segundo. Sin embargo a una velocidad de 38400 bits por segundo el sistema todavía funciona pero algunos de sus bits no son procesados
correctamente y se pierden en el proceso por lo que algunos de los caracteres enviados son erróneamente sustituidos por otros. Si se intenta aumentar aun más la velocidad los efectos de pérdida de información serán cada vez más notorios hasta el punto
en el que simplemente la comunicación no se da.
CAPÍTULO 6: Conclusiones y recomendaciones
Como pudo observarse en los capítulos anteriores, este proyecto no pudo lograr
todos los objetivos propuestos. Sin embargo se produce un avance tanto en la construcción del sistema que se desea implementar así como en el aporte de información
sobre todo con respecto a los distintos circuitos integrados que podrían conformar la
etapa de radiofrecuencia. Posiblemente el mayor aporte realizado sea el de integrar la
interfase TTL/RS232, el modulador y el demodulador en un único circuito impreso lo
cual hace que el sistema sea menos propenso a las fallas que pueden darse en una protoboard, sea menos sensible a interferencias y además sea más fácil de manipular, sin
olvidar el beneficio para el que desee continuar con este proyecto pues no deberá
construir nuevamente el circuito.
Las principales conclusiones a las que se ha llegado después de participar en este proyecto son las siguientes:
El área de comunicaciones inalámbricas es un área de nuestra carrera a la cual
no se le ha dado el énfasis que se merece, pues son pocos los cursos que profundizan
en estos temas. Esto debería corregirse pues los avances tecnológicos que se dan día a
día hacen que los aparatos electrónicos que se intercomunicaban por medio de cables
ahora se comuniquen en forma inalámbrica, por ejemplo los teléfonos y las computadoras por mencionar solo dos de ellos.
En nuestro país resulta difícil trabajar con sistemas de comunicación de radiofrecuencia debido a que los que trabajan con este tipo de sistemas constituyen un
mercado demasiado reducido como para que despierten el interés de las compañías
que se dedican a importar componentes electrónicos a nuestro país.
Resulta mucho más conveniente trabajar con un circuito impreso que con un circuito construido en una “protoboard” pues en la “protoboard” se pueden dar fallas
como falsos contactos e interferencia. Además, como se dijo anteriormente, el circuito
impreso es más fácil de manipular.
90
91
Construir un VCO para frecuencias altas en forma discreta es bastante incomodo
y con bastantes posibilidades de que se falle en el intento debido a que se tiene que lidiar con el diseño y construcción del inductor del VCO. Es mucho más apropiado trabajar con un VCO que tenga todos sus componentes en un solo encapsulado como el
que se propone en el capítulo 3.
El uso de un prescaler en la etapa de radiofrecuencia no es un requisito esencial
para que esta funcione. Sin embargo su uso se hace necesario por motivos meramente
prácticos. Se sabe que la longitud de la antena requerida para transmitir una señal es
inversamente proporcional a la frecuencia de dicha señal, por lo que debe tenerse una
frecuencia de transmisión lo suficientemente alta para tener una antena de un tamaño
adecuado.
Una gran ventaja que se obtiene al utilizar un sintetizador de frecuencias basado
en PLL es que este es capaz de dar una gran cantidad de magnitudes de frecuencia
distintas dependiendo de las necesidades del sistema, a diferencia de otros sistemas
que necesitarían un banco de cristales para poder realizar esta función. Evidentemente
esta ventaja se traduce en un diseño más simple y económico.
Por lo tanto resulta en extremo importante haber conseguido todos los componentes que se desean utilizar antes de comenzar el diseño del circuito impreso o al
menos estar muy seguro de que componentes son los que se van a utilizar. Esto debido a que el diseño del circuito impreso depende de la distribución y colocación de las
patillas de los componentes. Si en el mercado no se consigue algún componente con
la distribución de patillas necesitada entonces el diseño del circuito impreso deberá
ser modificado.
La principal recomendación que puede hacerse es que el sintetizador de frecuencias debe ser construido sobre un circuito impreso, debido a que las frecuencias a
las que éste trabaja son altas, lo cual representa un gran efecto de las capacitancias parásitas además de toda la interferencia que pueda producirse en el circuito. Trabajar a
éstas frecuencias en una “protoboard” resulta muy poco conveniente.
BIBLIOGRAFÍA
Se deben agregar en este apartado todas las citas o referencias bibliográficas utilizadas ordenadas alfabéticamente por el apellido del autor, de la siguiente manera.
Libros:
1. The American Radio Relay League. The ARRL Antenna Book. 14ta edición.
ARRL. Estados Unidos. 1983.
2. Campos, Christian. Manual de utilización computarizada de la máquina de fabricación de circuitos impresos Quick Circuit. Universidad de Costa Rica. San
José, Costa Rica. 2000.
3. Carr, Joseph J. Radiorreceptores. Primera Edición. Paraninfo S.A. Madrid, España. 1983.
4. Losee, Ferril. RFSystems, Components, and Circuits Handbook. Primera Edición. Artech House, Inc. 1997.
5. Rojas, José D. Diseño e implementación de un dispositivo transmisor y receptor
para la comunicación de dos computadoras por medio de radiofrecuencia por
modulación FSK (Proyecto de Graduación). Universidad de Costa Rica. San Jo-
sé, Costa Rica. 2006
Páginas web:
6. Dallas Semiconductor.
Fundamentals
of
RS-232
Serial
Comunication.
http://www.lammertbies.nl/download/dallas-appl-83.pdf.
7. Hewlett Packard. Digital Modulation in Communication Systems – An introduction. Aplication Note 1298
8. Jaquenod, Guillermo. Tutorial: enlace de transmisión de RF para transmisión
de
datos
a
baja
velocidad
y
a
corta
distancia:
segunda
parte.
www.automacion.com/mercado/articulos/99a.htm
9. Moore, Clarence. Patent 2,537,191, Quad Anntena. http://www.pentodepress.com
/receiving/patents/2537191.pdf
92
93
10. Spectrum Microwave. VCO. http://www.spectrummicrowave.com/vcos.asp
11. Antenna (radio). Wikipedia. http://en.wikipedia.org/wiki/Antennas
12. Frequency Shift Keying. http://en.wikipedia.org/wiki/Frequency-shift_keying
13. Osciladores a Cristal de Cuarzo. http://huarpe.com/electronica/osc/osciladorxtal.html
14. Como
hacer
circuitos
impresos
utilizando
material
fotosensible.
http://www.webelectronica.com.ar/news08/nota04/nota04/placasfotosensibles.htm
APÉNDICES
Apéndice A: Código de las simulaciones de Matlab®
modulacion_FSK.m
%Demostración para modulación FSK. La portadora es una señal cuadrada de
%10Hz
echo on
t0=.15;
ts=0.0005;
fc=75;
kf=20;
fs=1/ts;
t=[0:ts:t0];
df=0.25;
%signal duration
%intervalo de muestreo
%frecuencia portadora
%indice de modulacion
%frecuencia de muestreo
%vector tiempo
%resolucion de frecuencia requerida
%señal moduladora
m=[5*ones(1,t0/(3*ts)),zeros(1,t0/(3*ts)),5*ones(1,t0/(3*ts)+1)];
int_m(1)=0;
for i=1:length(t)-1
%integral de m
int_m(i+1)=int_m(i)+m(i)*ts;
echo off;
end
echo on;
[M,m,dfl]=fftseq(m,ts,df);
%transformada Fourier
M=M/fs;
%escala
f=[0:dfl:dfl*(length(m)-1)]-fs/2;
%vector de frecuencia
ucos=cos(2*pi*fc*t);
%senal portadora
u=cos(2*pi*fc*t+2*pi*kf*int_m);
%senal modulada
[U,u,dfl]=fftseq(u,ts,df);
%transformada Fourier
U=U/fs
%escala
figure(1)
subplot(3,1,1)
plot(t,m(1:length(t)))
axis([0 0.15 -1 1.1*max(m)])
xlabel('Tiempo')
title('Señal Moduladora')
subplot(3,1,2)
plot(t,u(1:length(t)))
axis([0 0.15 1.1*min(u) 1.1*max(u)])
xlabel('Tiempo')
title('Señal Modulada')
subplot(3,1,3)
plot(t,ucos(1:length(t)))
axis([0 0.15 1.1*min(u) 1.1*max(u)])
xlabel('Tiempo')
94
95
title('Señal Portadora')
figure(2)
subplot(2,1,1)
plot(f,abs(fftshift(M)))
xlabel('Frecuencia')
title('Espectro de la moduladora')
subplot(2,1,2)
plot(f,abs(fftshift(U)))
title('Espectro de la modulada')
xlabel('Frecuencia')
demodulacion_FSK.m
%Demostracion para de modulacion FM. Senal moduladora es una señal
%cuadrada de 20Hz
echo on
t0=.2;
ts=0.0001;
fc=250;
snr=15;
fs=1/ts;
df=0.3;
rida
t=[-t0/2:ts:t0/2];
kf=100;
df=0.25;
rida
m=square(2*pi*20*t);
int_m(1)=0;
for i=1:length(t)-1
int_m(i+1)=int_m(i)+m(i)*ts;
echo off;
end
echo on;
[M,m,dfl]=fftseq(m,ts,df);
M=M/fs;
f=[0:dfl:dfl*(length(m)-1)]-fs/2;
u=cos(2*pi*fc*t+2*pi*kf*int_m);
unoise=awgn(u,snr);
[U,u,dfl]=fftseq(u,ts,df);
U=U/fs;
[v,phase]=env_phas(u,ts,250);
u
phi=unwrap(phase)
dem=(1/(2*pi*kf))*(diff(phi)/ts);
escala la fase
demnoise=awgn(dem,snr);
escala la fase (ruido)
%periodo de la senal
%intervalo de muestreo
%frecuencia de la portadora
%SNR en dB (logaritmico)
%frecuencia de muestreo
%resolucion de frecuencia reque%vector tiempo
%constante de desviacion
%resolucion de frecuencia reque%senal moduladora
%integral de m
%transformada de Fourier
%escala
%vector de frecuencia
%senal modulada
%Senal modulada con ruido
%transformada de fourier
%escala
%demodulacion, encuentra fase de
%restaura fase original
%salida del demodulador, resta y
%salida del demodulador, resta y
96
figure(1)
subplot(3,1,1);
plot(t,m(1:length(t)));
axis([-0.1 0.1 -2 2]);
xlabel('Tiempo (s)');
title('Señal Moduladora');
subplot(3,1,2);
plot(t,u(1:length(t)));
axis([-0.1 0.1 -2 2]);
xlabel('Tiempo (s)');
title('Señal Modulada');
subplot(3,1,3);
plot(t,unoise(1:length(t)));
axis([-0.1 0.1 -2 2]);
xlabel('Tiempo (s)');
title('Señal Modulada con Ruido');
figure(2)
subplot(2,1,1);
plot(f,abs(fftshift(M)));
xlabel('Frecuencia (Hz)');
title('Espectro de frecuencia de la moduladora');
subplot(2,1,2);
plot(f,abs(fftshift(U)));
title('Espectro de frecuencia de la modulada');
xlabel('Frecuencia (Hz)');
figure(3)
subplot(3,1,1);
plot(t,m(1:length(t)));
axis([-0.1 0.1 -2 2]);
xlabel('Tiempo (s)');
title('Señal moduladora');
subplot(3,1,2);
plot(t,dem(1:length(t)));
axis([-0.1 0.1 -2 2]);
xlabel('Tiempo (s)');
title('Señal demodulada');
subplot(3,1,3);
plot(t,demnoise(1:length(t)));
axis([-0.1 0.1 -2 2]);
xlabel('Tiempo (s)');
title('Señal demodulada con Ruido');
97
env_phas.m
function [v,phi]=env_phas(x,ts,f0)
%
[v,phi]=env_phas(x,ts,f0)
%
v=env_phas(x,ts,f0)
%ENV_PHAS
Regresa la envolvente y la fase de la señal x.
%
f0 es la frecuencia central.
%
ts esel intervalo e muestreo.
%
if nargout == 2
z=loweq(x,ts,f0);
phi=angle(z);
end
v=abs(hilbert(x));
fftseq.m
function [M,m,df]=fftseq(m,ts,df)
% [M,m,df]=fftseq(m,ts,df)
% [M,m,df]=fftseq(m,ts)
% FFTSEQ Genera M, la FFT de m.
fs=1/ts;
if nargin == 2
n1=0;
else
n1=fs/df;
end
n2=length(m);
n=2^(max(nextpow2(n1),nextpow2(n2)));
M=fft(m,n);
m=[m,zeros(1,n-n2)];
df=fs/n;
loweq.m
function xl=loweq(x,ts,f0)
%
xl=loweq(x,ts,f0)
%LOWEQ
Regresa el equivalente pasabajo de la señal x.
%
f0 es la frecuencia central.
%
ts es el intrvalo de muestreo.
t=[0:ts:ts*(length(x)-1)];
z=hilbert(x);
xl=z.*exp(-j*2*pi*f0*t);
ANEXOS
En las siguientes páginas se presentan las hojas del fabricante de los dispositivos
electrónicos utilizados en este proyecto.
98