2 - Cenidet
Anuncio

911289
S.E.P.
S.E.J.T.
D.G.I.T.
CENTRO NACIONAL DE INVESTIGACION Y
DESARROLLO TECNOLOGICO
"CONTROL DIGITAL DE VELOCIDAD DE
UNA TURBINA DE VAPOR"
E
T
S
S
I
PARA OBTENER EL GRADO DE
MAESTRO
INGENlERlA
P
R
E
SALVADOR
CUERNAVACA, MOR.
EN
S
CIENCIAS
EN
ELECTRONICA
E
N
ZAZUETA
T
A
:
RUBIO
DICIEMBRE 1990
Cuernavaca, Mor.,
1 0 d e d i c i e m b r e d e 1990.
D r . Juan Manuel R i c a ñ o C a s t i l l o
Director d e l CENIDET
P r e s e n t e
At'n.:
M.C. A l e j a n d r o Dfaz S.
Coordinador de l a Maestría
en Ingenierfa Eiectr6nica
P o r este conducto, hacemos de s u conocimiento que, después d e haber sometido a r e v i s i ó n e l t r a b a j o d e tesis
t i t u l a d o "CONTROL D I G I T A L DE VELOCIDAD DE UNA TURBINA
DE VAPOR", d e s a r r o l l a d o por e l Ing. S a l v a d o r Zazueta R;
bio, y habiendo cumplido con t o d a s l a s correcciones que
se l e i n d i c a r o n , estamos d e acuerdo e n que se l e conceda l a a u t o r i z a c i d n d e impresi6n d e l a tesis y l a f e c h a
d e examen d e grado.
-
S i n otro p a r t i c u l a r , quedamos de usted.
A t e n t a m e n t e
Dr.@
u f n C o l l a d o Moctezuma
PROLONCAClON PALMlRP S / N
ICECAP M.571 A P 4 - 2 2 4
PILLMIW MORELOS C R 62 431
TELS. 12-76-13 y 1 4 - 0 6 - 3 7
OlRECClON GENERAL DE INSTITUTO$ TECNOLO[;ICOS
CENTRO NKIONAL
DE 1NVESTIOPCIO)I
Y DESPRROLLO TECNOLOQBO
Of. NO. 613-9/32077
Cuernavaca', Mor.,
diciembre 10 de 1990.
Ing. Salvador Zazueta Rubio
Candidato al Grado de Maestro
en Ciencias en Ingeniería Electrbnica
P r e s e n t e
Después de haber sometido a revisión su trabajo final
de tesis titulado
"CONTROL DIGITAL DE VELOCIDAD DE U N A TURBINA DE VAPOR"
y habiendo cumplido con todas las indicaciones que el
Jurado Revisor de Tesis le hizo, se le comunica que se
le concede autorización para que proceda a la impresión
de la misma, como requisito para la obtención del grado.
A t e n t a m e nli,te
en ingeniería Electrónica
PROLONGACION
PaLMiRa S / N
lCECAP No 57) A P 4-224
PNMIñA, MORELOS C P 6 2 431
TELS 1 2 - 7 6 - 1 3 y 1 4 - 0 6 - 3 7
AGRADECIMIENTO :
Expresando el mas sincero agradecimiento a todos
aquellos que hicieron posible la realizacidn de
al Dr.
este trabajo de tesis. Especialmente,
Edgar N. Sánchez Camperos por su dedicaci6n y
apoyo, y al DI. Hector Ocampo por su ayuda en la
parte de modelado de la turbina de vapor.
INDICE
.................................
11 H O D E L M 0 DE IJL TilñBINA DE VAPOR. .................
2.1 - Descripcidn matemática.
2.2 - Turbina de alta presión.
2.3 - Alabes de impulso.
2.4 - Algoritmo de solucidn de la etapa gobernadora.
2.5 - Cámara de impulso.
- Zona de reaccidn.
2.7 - Turbinas de presidn intermedia y presión baja.
-- Potencia
mecánica da oalida de la turbina.
Etapa de conversidn potencia velocidad.
- Sistema8 gobernadoreo para turbinas de vapor.
2.11 - Consideraciones para el estudio de estabilidad.
- Programa de computadora.
2.13 - Linealización del modelo.
I
INTRODUCCION.
1
3
2.6
2.8
2.9
2.10
2.12
............................
I11 FACMRIZACXON RACIONAL
3.1
Planteamiento del problema.
Solución de la minimización de las normas'%
3.2
3.2.1
Funciones interiores y exteriores.
3.2.2
Factorizacidn interior y exterior.
3.3
Sumario miniipización de la8 nonuas H, y I&
-
IV
-y y.
-.
DISER0 DE i0S CONTROLADORES. .......................
37
4.1 - Diseño en el punto de 50 O de operaci6n nominal
da la turbina.
4.2
V
24
- Pruebas do los controladores.
--
D I S m O ELECTñONICO DEL CONTROLADOR.
5.1
Wocripcidn de la tarjeta.
5.2
Funcionamiento de la tarjeta
-- .
................
.
45
......................................
VI CONCWSIONES.
49
6.1
Deoempeño de los controladores.
6.2
Análisis da ventajas y deeventajao del controlador
CD
6.3
Trabajos Suturos.
........................................ 52
ANEXO ..............................................
55
- -AL PARA EL DEL
(modelo no lineal de
REFERENCIAS.
A.1
A.l.l
A.1.2
A.2
A.2.1
A.2.2
pRoGRAlIA
la turbina)
Control de programa.
Variables desplegadas por el programa.
MANUAL DE USO DE TARJETA.
Especificaciones tecnicas de la tarjeta
de entrada salida.
DIAGRAEUS ELECrmONICOS DE Lk TAWETA
DE ENTRADA-SALIDA.
--
--
-
- - EjomploDEda
A.3
A.3.1
EJEHPLO
PROGRAMA DE CONTROL (PID digital).
funcidn an luiguaja H A W .
CAPITULO 1
INTRODUCCION
Este trabajo presenta el diseño de un controlador digital para
una turbina de vapor. La motivaci6n principal es sentar las bases
apropiadas para el cambio entre un sistema de control analbgico,
que es el más usado actualmente en este tipo de proceso, por un
sistema de control digitalpor computadora. Algunas justificaciones
para este cambio son :
1 : Facilidad de variad611 de los p a r h t r o s del controlador.
2 : Una interfaz con el usuario del sistema a trav&s de una sola
pantalla de computadora, con lo que ne eliiinarlan una gran
cantidad de monitores anal6gicos.
3 : un mantenimiento del sistema mucho mas sencillo, debido a la
reducción de componentes del sistema.
4 : Programación del sistema de seguridad en el mismo dispositivo.
5 : Interacci6n entre usuario y sistema en forma directa, que
permite visualizañ de distintas maneras ( gráficas en pantalla
, diagramas de barras,
) el comportamiento del sistema.
...
Es posible tambien la inplantacibn electr6nka de la interfaz del
controlador, por medio de una tarjeta insertable en una ranura del
ducto de una computadora personal compatible con IBM-=/AT; se
seleccion6 este tipo de miquina por :
.
1) Su gran difusión
2) Sus caracterlsticas de velocidad de proceso adecuadas.
3) Diseño de una interfaz entrada/salida relativamente
sencillo.
4) Compatible con una gran variedad de paquetes de disefio y
de simulaci6n, para el deearrolo de ristemas a un costo
muy accesible.
Para el diseño de los controladores sa usaron dos criterios
1 : Discretización de los sistemas de controladores anal6-
gicos usados actualmente en
.
a1 proceso.
2 : Seguimiento 6 p t i m o y rechazo de perturbaciones óptimo,
minimizando la norma .ti
El primer criterio está plenamente justificado puesto que este tipo
de controladores es el que mas se usa para el control de turbinas
de vapor. La justificación para usar el segundo criterio es aplicar
una técnica moderna para el diseño del controlador y evaluar los
resultados obtenidos.
Al concluirse la etapa anterior se evaluaron los desempeños de
aabos controladores y se emitieron la6 conclusiones pertinentes.
1
El trabajo so reali.6
de acuerdo a loo siguientoa pasos :
a) XODEDE LA TURBINA DE VAPOR, dosarrollo de las ocuaciones
que permitan su shulaci6n con computadora.
b) PROGRAMCION DEL HODELL), se program6 en Turbo Pascal versidn
5.5, usando mdtodon de integraci6n Runge-Kutta de cuarto orden,
en base a nicrocomputadora personal coiptíble con IBII-PC/AT.
C)
PROGRAMCION DE RüTINAS DE GRAFICIUX), para lograr una
visualizaci6n de la evolucidn de los experhntos realizados
con el proceso mencionado.
d) LINEñLIZACION DEL XODELO, para el diseño de los controladores.
e) DISmO DE Lo6 AiGORITIIOS DE CONTROL, do acuerdo a loa criterios
expuestos.
f) PROGRAXACION DE IDS U ; G O R I ~ O SDE CONTROL, para incorporarlos
al modelo no lineal y evaluar su desempeño.
g ) DISERO Y CONSTRUCCION DE LA INTERFAZ IBX-PC/AT.
La memoria de tesis está organizada por capítulos de la siguiente
manera :
1) INTRODUCCION.
2) XODELMO DE LA TURBINA DE VAPOR
3) FACTORIZACION RACIONAL.
.
4) DISERO DE Lo8 CONTROLMORES.
5) DISER0 ELECTRONIC0 DEL CONTROLADOR.
6) CONCLUSIONES.
ANEXO.
2
CAPITULO 2
MODELAM) DE LA TURBINA DE VAPOR
1
,
Este capitulo se aboca al estudio de un modelo no lineal, de una
turbina de vapor del tipo "tandem compound* (las etapas de presión
alta, media y baja estbn en el m i s m o eje). El objetivo de este
capitulo es, adaptar un node10 validado [1,2], para su 8imulación
en una computadora personal compatible con IBM-=/AT.
El node10
fundamental, para este fin, se basa en otros Mdelos de turbina de
vapor[l,2], probados y funcionando actualmente en siiuladorea de
plantas termoeléctricas.
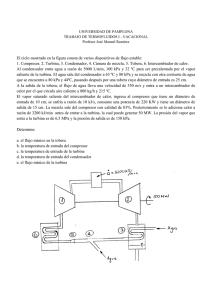
La turbina a modelar es de la clase mencionada con recalentamiento
simple; BU potencia múxima ea de 350 ~hr[ a ] . A continuaci6n se
presenta un esquema de eete tipo de turbina.
FIGURA 2 . 1
DIAGRAEU DE LA TURBINA ACTüAL.
donde :
1
1.- Cuatro válvulas eetranguladeras
2.- Ocho válvulas gobernadoras
3.- Salida al recalentador
4.- Cuatro válvulas interceptoras
5 . - Flujo de extracci6n al deaereador
6.- Flujo al condensador
7 . - Extracciones
2.1 DESCRIPCION MATEMATICA
Una turbina de vapor del t i p o "tandem compound"
se divide
generalmente en tres partes: alta presión, presión intermedia y
3
baja presi6n. El iodolo, a
U. vez, tambidn se divido en estas
partes. E1 objetivo fundamental de este modelo es simular la
potencia traneferida a1 eje por e1 vapor en expanei6r1, as1 como las
características (temperatura, energía intorna, prosión) del vapor
que fluye a través de las distintas etapas de presión. Las
variables simuladas por este modelo tienen un error
del 1%
comparados con los valores bdsicos proporcionados por las hojas de
datos y mediciones de la turbina de vapor real. La t6cnica usada
para el desarrollo del modelo es la de parbetroe concentrados, con
lo que se simplifica iucho el esfuerzo de modelado puesto que se
integran las ecuaciones resultantes solo con respecto al tiempo,
y no con respecto a la distancia. A continuaci6n se detalla cada
parte del modelo.
2.2 TVRBINA DE ALTA PRESION
La primera parte del modelo representa la turbina de alta presi6n
junto con sus valvulas gobernadoras. Para su modelado se dividí6
en tres partes : Vdlvulas gobernadoras (con difusores), Toberas de
vapor y Etapa de impulso. A continuación se presenta un esquema
global del modelo:
I
-----
FIGURA 2.2
MODEIio DE LA TURBINA DE ALIPA
PRESION.
Presi6n del Vapor da Entrada.
Temperatura del Vapor de Entrada.
Entalpla del Vapor de Entrada.
Flujo de Vapor en la Válvula Gobernadora.
wcv
RoHP
Densidad del Vapor en la Turbina de Alta Presi6n.
Energía Interna del Vapor en la Turbina de Alta
rnP
mesih.
PHP = Presidn en la Turbina de Alta Presi6n.
en la Turbina de Alta Presi6n.
hWP = Xntalaía
c _ - del
___ Vanar
- r-hHPI = Entalpía del Vapor de la Turbina de Alta ~resi6n.
Flujo del Vapor en la Turbina de Alta Presión.
WHP
Presión a la Salida de la Turbina de Alta Presi6n.
PHPE
Entalpla del Vapor a la Salida de la Turbina de
hHPE
Alta Presibn.
Temperatura del Vapor a la Salida de la Turbina
THPE
de Alta Presi6n.
Donde : PHSH
THSH
hlISH
---
-
4
Cada una de lam partes del modelo de la turbina de alta prosi6n,
se discute uisequida.
, a) Válvulas gobernadoras y Toberas de vapor.
PHSH
THSH
RoHSH
IiHw
VALVULA
4)
TTH
PHP
u
hrHP
DIFUSOR
FIGURA 2.3
ESQUEMA DE UNA VALWLA GOBENADOM
Las variables son las mismas previamente definidas en la figura
2.2.
Para modelar la dinámica de estas válvulas, se deben considerar dos
tipos de flujo: sónico y sube6nico.
Para el caso subsónico :
pTW/pWH
-
'
VC'
donde : PW = Presi6n de Vapor de Entrada.
PTi = Presidn del Vapor en el Difusor.
PCV Raz6n Critica de Presi6n de la Válvula.
El flujo a través da la válvula emtá dado por :
donde : PCV
2Pwrn
HT'
Y
....(2.1)
....( 2 . 2 )
= Raz6n Critica de Presidn de la Válvula.
= coeficiente Subs6nico de Flujo en la Válvula.
= Area Expuesta Eficaz de las Válvulas.
-
Presidn del Vapor de Entrada a la Válvula.
Densidad del Vapor de Entrada.
= Presi6n del Vapor en el Difusor.
= Flujo de Vapor a través de la Válvula.
5
J
Para flujo s6nico no sa matisfaom la mcuaci6n (2.1) y 01 flujo mot6
dado por :
--
-ñ,,*%*Piuw/( T w )
....(2.3)
donde : ñ
,,
Coeficiente S6nico de la Válvula.
Tw = Tempexatura del Vapor de Entrada a la Válvula.
P,,,,, Presión del Vapor a la Entrada de la Válvula.
Area Expuesta de la Válvula.
%
El vapor pasa del difusor a las tobera.;
el flujo a traves de esta
última depende de las condiciones de presi6n en ella.
si:
'
PdPTH
Po
donde : PW = Presi6n del Vapor en la Tobera.
Po = ñaz6n Crítica de Presión en la Tobera.
PIN= Presi6n del Vapor en el Difusor.
el flujo es subs6nico y esta dado por :
donde : A,,
d,
&"
W
W'=(dI*A,,)* *&H(PrH-Pwp)
....(2.4)
....(2.5)
= Garganta de la Tobera Normalizada.
= Coeficiente Subs6nico de Flujo en la Tobera.
= Densidad del Vapor en el Difusor.
= Flujo en la Valvula.
Si la ecuación (2.4) no se satisfacm entonceo el flujo es s6nico
y est6 definido por :
W-%*A,,*P,d
TTH
....(2.6)
donde : K,, = Coeficiente S6nico de la Tobera.
El flujo, a través de las combinaciones válvula-tobera, se analiza
como sigue.
Caso Subs6nico :
si no se ahogan las vdlvulas
PdPHS"
' pa
....(2.7)
donde : Pa = Raz6n Critica de Presidn de la Tobera.
6
si se cumpla la ecuación (2.7) la coibinación v6lvula-tobera es
subsónica y e1 flujo está dado1 por :
....(2.8)
=((n,d,)*bt(n
/C,)l)/(( y $ ) ' + ( " . d l ) ' )
....(2.9)
= m e r o de A
d vulas Regu a o con Area Reguladora
Y**
donde: c
n,
dl
C,
&
PW
,
P
b,
---
=c.Ro,(P>,-P,)
4.
Coeficiente Subsónico de Flujo en la Tobera.
= Coeficiente Subsónico de Flujo en la Válvula.
= Densidad del Vapor a la Entrada de la Válvula.
Presión del Vapor a la Entrada de la Válvula.
Presión del Vapor al Salida de la Válvula.
Constante.
El flujo subsónico a travds 'de Pas combinaciones totalmente
abiertas (n,) está dado por :
W*
....(2.10)
....(2.11)
=C1' 'RO,, ( Pwsw-P,,)
aqui : cl*= nfa .dla *bt/(l+dl' nbt)
Caso Sónico :
I
Suponga que no se satisface (2.8); as posible entonces tener tres
situaciones en las combinaciones válvula-tobera:
1) No ahogadas . I
2) Ahogadas en tobera.
3) Ahogadas en válvui8.
A continuación se muestran las ecuaciones para obtener e1 flujo en
las combinaciones vdlvula-tobera ,en cada caso.
caso 1) El flujo es subsónico y se obtieno de la ecuación (2.2).
caso 2) El flujo a traves de las n toberai está dado por la
ecuación (2.6) y por :
w = n r - q *Ro,,,* T,,-(
donde :
dl =
(1+4.C,-%'
*RoWtw*T,
I
*P&(d2))-1)/63
e...
I
d2 = 2*C,-K,,
Las demás variaüles están definidas arriba.
de esta ocuación
se deduce que si
(2.12)
is8
conoce
P,,,
se conoce v.
caso 3) El flujo a trev6e de las válvulas reguladoras sa obtiene
partir de (2.3).
Si e1 flujo en la tobera es subsónico, el eiguionte conjunto de
ecuaciones permite obtener la entalpía ideal h,que sale de la
aetá dada por (2.2) o (2.5) dependiendo de
tobera (La presión Ptii
la ecuación que defina w, dadas estas por (2.8) o (2.3)
T
se encuentra suponiendo flujo
respectivamente; el estado ,
isoentrópico a trav4s de la tobera) entonces :
s..
donde: f ( x , x )
k
--
(2.13)
....(
2.14)
....(2.15)
Estado Termodinbico Obtenido de Tablas de Vapor.
Razón de Calores Específicos.
Si el flujo es sónico, w está dado por (2.12) y PTw se obtiene de
'(2.2) entonces, las ecuaciones para calcular los estados
tennodinbnicos restantes son :
TrMPf2 (Pinil+$)
=PTn.(2/(k-l))
....(2.16)
....(2.17)
ík/(t-O>
n *,#'(2/(k-l))
Ni' =( l/ (k-1)) * (-l+ ( (kl)(k+l)(Ag-Pt/P,)
T,=Tt(k+l) / (2(1+(k-1)Nl' ) )
b = f l (PWI TW)
-
' +1)) )
....(2.18)
........(2.20)
(2.19)
....(2.21)
donde: Pt,Tt
Condiciones de Presión y Temperatura en la Tobera.
Ni'
= Número Xach (sónico).
Ag
Constante (Razón de Area. Garganta Tobera/Salida).
Una nota importante es que la caida de praiión a trav6s de una
valvula completamente abierta se puede conocer de condiciones de
diseño; en este caso es ventajoso sustituir PTn-g(PH,,J en las
ecuaciones anteriores.
2.3 ALABES DE IHFWLGO
Es un proceso de presi6n constante, con intercambio de solo
energía cindtica y no de energía potencial, la entalpía que sale
de esta etapa es la misma que entra a traves de las toberas; por
lo tanto solo es necesario tomar en cuenta la eficiencia de esta
8
etapa. Esta se obtione da dato8 de balances de calor colo una
función de1 flujo :
donde:
--
Ef,-g(w,)
....(2.22)
; i-1,2..
Ef- Eficiencia de la Etapa de Impulso.
Flujo a traves de la Etapa.
Número de la Etapa de Alabo..
rl
Entonces la entalpía que resulta, hasta esta etapa, viene dada por:
h#b-
(Vi *ñf1 (b#H-&,)+W2
*Ef2( h , , , l i - b )
....(2.23)
)/Ww
De la ecuación (2.23), es fácil notar que la entalpía i4p es un
promedio de las entalpías resultantes de los flujos sóniam y
subsónicos, w1 y w2 respectivamente.
I
2.4 AIl;oRI”HO DE SOLUCION PARA
IA ETAPA GOBERN-RA
La clave del algoritmo es conocer la condici6n del flujo en la
combinación válvula-tobera. Pueden existir tres grupos diferentes
de combinaciones dependiendo del viaje del &bolo de válvula, que
ha seguido cada grupo. Los grupos de válvulas son : F-válvula6
totalmente abierta6 (no regulan e1 flujo) , N-válvulas semiabiertas
(rango de regulación del flujo) y C-aquellas válvulas que se
encuentran en una parte muy baja de su viaje total.
Posibilidades de los g N p 0 de válvulas:
F
sin ahogar
tobera ahogada
€
N
sin ahogar
sin ahogar
valv.ahogada
tobera ahogada
Descripción del algoritmo :
I)
C
sin ahogar
sin ahogar
valv.ahogada
valv.ahogada
sin ahogar
-E val v. da
.- a) -suponga
F (válvulas totalmente abiertas) sin ahogar, N
(válvulas en rango de regulación) y C (válvulas casi
cerradas) sin ahogar.
b) -usa la ecuación subsónica (1.8)
c) -verifique P,JP,, > Pa
d) -si c) es cierto vaya a VI1
II).-a) -suponga F ahogadas en la tobera
b) -suponga N sin ahogar.10 que implica que las tOberaS Casi
cerradas (C) estan nin ahogar
c) -use (2.12) para F y (2.8) en las d d s ( C Y N
d) -calcule P
, y PTR de (2)
9
..
.
.- ...
-verifiqua P,,,/P,~ > Pa ,PI,,,,/PIII
> ,P
- X k o e)pcvu cierto vaya
ni,mi solo 01-3 es iaima
vaya a V-b)
-m&nga
de’nuevo 11-a
-muponga N ahogadam lo que implica C ahoagadam
-u- (2.12) en las P y (6) en W y C
-calcule PI de (2.5)
-verifique 9Yn/PY < pcv
ai e) es c erta vaya a VII
-suponga 11-a)
-suponga N ahogadas en la tobera
-suponga C no ahogada.
-use (2.12) en P y bl ,y (7) en C
-calcule ,
.P de (2.2)
-verifique”?,dP,&
>-pn,y PW/P,~> poi
-si f ) es cierto vaya a VI1
-suponga 11-a) y IV&)
-suponga C ahogadas
-use (2.12) en N y P y (2.3) en C
-calcule P, de (2.5)
-verifique%ld~w < ,
P
-si e) es cierto vaya a VII
-suponga 11-a) y IV-b)
-suponga C ahogadas en tobera
-use ( 9 ) en todas las combinaciones (N,P,c)
-calcule PI, de (2.2)
-calcule loo estados termodin8mico8
’
-
Debe notarse que al programa puede optimizarse y a010 se repitieron
algunas proposiciones para lograr claridad en la descripción del
algoritmo.
2.5 CAiáARA DE IMPULSO
La cámara de impulso se toma en cuenta para determinar las
dinámicas del vapor en la turbina de alta preeibn. El volumen total
de la cámara representa un posible almacenamiento de masa y
energía. Dependiendo de las constantes de tiempo de inter& en el
estudio total, es posible incluir o desechar estas dinámicas pUe8tO
que son demasiado rápidaa. Debe hacerse notar que la inclusibn de
estas dinámicas facilita elmodelado, pues rompe el bucle implícito
al tratar de solucionar Pw, puesto que eeta presi6n es una entrada
en las turbinas de impulso y reaccibn.
Esta etapa se modela como una capacitancia, representada por un
almacenamiento de masa y energía; se supone que la densidad y la
10
energía interna (Ro y U) son uniformea, 0s decir:
donde : %U
,
U
--
Row-Ron (t)
....(2.24)
....(2.25)
U,-w(t)
Densidad del Vapor en la Cámara de ~ipulso.
Energía Interna en la a r a de Impuioo.
La ecuación de continuidad es:
d (%U) /at= (VCl-yp) /v
....(2.26)
donde : vov = Flujo Válvula Gobernadora.
v, = Flujo Turbina de Alta Presi6n.
Rolp = Densidad del Vapor en la Cdmara de Impulso.
v = Volumen de la Cámara de Impulso.
La ecuación de balance de energía es:
&, -
donde : b
= Entalpía en la Turbina de Alta Presión.
Entalpía en la Entrada de la Turbina de Alta
Presión.
una vez conocidas Row y ,
U
se pueden conocer :
....(2.28)
....(2.29)
Debe notarse que esta representación de P rompe e1 bucle implícito
que se habría suscitado, pues esta presrón es una entrada en las
turbinas de hpulso y reacción.
2.6 ZONA DE REACCION
El flujo de vapor por los álabes de reacci6n de la turbina de alta
presión está representado por una forma de la ecuacidn de Stodola.
11
Esta forma se deriva do cuatro propodcionom : 1) el diferoncial
de tempratura ontre cada otapa de reaoción es muy pequoño, 2) hay
un gran ntboro de otapai de reacción, 3)la .xpaiuih del vapor es
un proceso politrópico y 4 ) la oficioncia de la otapa no cambia
para condiciones fuora de di8otio. El habor escogido la ecuación de
Stodola se basa : primero, es muy precisa para predecir 01
desempeño de la turbina en condicione8 fuera de diseño u toma on
cuenta el flujo en ambas direccionen, hacia adelante y hacia atrds
a lo largo de la turbina.
La ecuación quo resulta es :
f3(PmsTm)
hypE = hWP1-EtWP1 (hlfP,-h*,)
....(2.30)
....(2.31)
....(2.32)
....(2.33)
Entalpía Ideal que Sale de la Turbina de Alta
Presión.
Presión del Vapor de Salida de la Turbina de
Alta Presi6n.
Temperatura del Vpor a la Salida de la Turbina
de Alta Presión.
Eficiencia de la Turbina de Reacci6n.
Constante de Stodola.
2-Ef-(k-l)/k (Ef = Eficiencia de Paso Pequeño).
la eficiencia de la turbina de reacción, es una función del flujo
de las válvulas gobernadoras y se obtiene de dato8 de balancee de
calor
.
2.7 TURBINAS DE PRESION INTERMEDIA Y PRESION BAJA
Estas dos etapas se modelan juntas, por el acoplamiento directo
del flujo de vapor que existe entre ellas. El vapor que proviene
del recalentador pana por cuatro válvulae interceptoras las cuales
solo funcionan en procedimientos de arranque y paro: aun así, se
toman en cuenta en el programa del modelo para poder simular en
parte estos procedimientos (en e1 modelo solo se mimula el cierre
de este grupo de vdlvulas en el procedimiento de paro: no es
posible con este modelo simular el arranque). Estas válvulas se
modelan como reeistencias variables. Las extracciones se modelan
juntas, como una extracción concentrada. La tuberla de cruce
(crossover piping) se modela como una capacitancia pura, pues su
función es la de hacer pasar el vapor desde la turbina de presión
intermedia a la de baja presión con un minim0 en la caída de
presidn del vapor a trav4s de ella. A continuación se presenta O1
12
esquema del modelo:
FIGURA 2.4
ESQUEMA DEL MODELO DE TURBINA DE
PRESION 1NTERH.EDU Y BAJA.
Las ecuacionea que describen la etapa de presibn intermedia son :
-el flujo que fluye por la turbina de presi6n intermedia es
t
---
donde : KIv =
A*Iv
Ro,
Pm
PIP
VIPa=KIv *A* Iv
'RO, ( Pwii-Pip)
...(
2.1-ip)
Coeficiente de las Válvulas Interceptoras.
Area do las Vdlvulas Interceptoras.
Densidad del Vapor al Salir del Recalentador.
Presión del Vapor a la Salida del Recalentador.
Presión del Vapor en la Turbina de Presibn
Intermedia.
z
0
Q!
z
+
= u
!!a
z -z
nu
-las ecuacionee de balance de m e a y energía (son similares a las
del modelo de turbina de alta presión )
...(2.2-ip)
d(UlP)/dt-((~-Uip)Wv-(h,p-Ul) ~ l p ) / ( ~ ~ l p * ~ ~..P.(2.3-iP)
(2.4-ip)
)
P1p-f d (RoIp,u~p
5
.
..(2.5-ip)
T,p=f6(Ro1p,UIp)
hip47 (ROlp,UIp)
...(2.6-ip)
0
0
LI:
U
d(Ro,p)/dtP(Wiy-WIp-WIII)/ViP
donde :
---
s
.
Flujo de Vapor en las Vdlvulao Interceptoras.
Flujo de Vapor en la Turbina de Presi6n Intermedia.
wisr
Flujo de Paso (BYPASS) de la Turbina de Preei6n
Inte-dia.
v , ~ Volumen de la Turbina de Presi6n Intermedia.
Energía Interna.
U
T
Temperatura.
Entalpia.
h
Presi6n Intermedia (subindice).
IP
HR = Recalentador (subindice).
wIv
wIp
---
13
c%9
a
N
v-
aa
F
d
s
Para propbsitos genoralos PIP00 la ialida do un integradar.
-el flujo a través de la turbina de prosi6n interndia
donde :
~ I r = k I(1p (P~Pip).s’)
...
(2.7-b)
KIP = Constante de Stodola de la Turbina de Presión
Intermedia.
PW = Presión del Vapor en la Turbina de Baja Presión.
PIP= Presidn del Vapor en la Turbina de Presi6n
Intermedia.
m,, = 2
(k-l)np/k
k = Raz6n de Calores Específicom del Vapor.
np = Eficiencia de la Etapa.
-
.
Las constantes usadas en esta ecuaci6n (2.174~) son similares a
las definidas en (2.1-ip) (ecuación de Stodola).
Por las leyes de expanei6n isoentr6pica, se obtiene:
T
,*
p p (<k-l)/k>
IP(
ld
IP)
hIm-f8 (Pip,T
I
,
)
h,&lp-EfiP
(h,p-h+l,)
...(2.8-ip)
...(2.9-ip)
...(2.lOiP)
Si no se considerara la dinámica del vapor en esta etapa, se
formaría un lazo implícito al tratar de resolver (2.l-ip) y
(2.7-ip). Este lazo se forma puesto que PI, está presento en ambas
ecuaciones: el lazo se forma cuando se resuelve la ecuacidn de
entrada ( 2 . 1 4 ~ )y se modifica el valor de PI, para la segunda
(2.7-ip). Este lazo tambien se presenta
en la etapa de alta
presibn.
- W e r i a de cruce (crossover piping).
Las ecuaciones de balance de masa y onergia son semejantes a las
aplicadas en lam etapas anteriores y emtbn dadas por :
d(Rolp) /dt-(WIp-w~-Ulp)/V,
donde:
d(Uw)/dtp(
tipEl=
h,, =
U =
vcop=
h =
Ro =
w
=
(hI,-Ulp)
(W,,-~prr)-~p.w~,)/(RO~c.Vsop)
..(2.1l-ip)
..(2.12-iP)
Extracci6n de la Turbina de Presión Intermedia a
los Deaereadoros.
Entalpía qua Sale de la Etapa de Prasi6n Intermedia.
Energía Interna.
Volumen de la Tubería de Cruce.
Entalpía.
Deneidad.
Flujo.
14
I
LP
IP
donde :
P
h
s
LP
--
&ja Pre8i6n (subíndice).
Presi6n Intermedia (subíndice).
..(2.l5-ip)
= Presi6n.
= Entalpía.
= Entropía.
= Etapa de Baja Preai6n (subíndice).
-Turbina de baja presi6n :
Esta, como les anteriores, representa una capacitancia y una
resistencia
al flujo del vapor. Varias diferencias hacen el
modelado de esta parte mas sencillo: l), la ausencia de válvulas
en la entrada permite que la capacitancia de esta turbina se pueda
agregar a la capacitancia de la tubería de cruce, por lo tanto el
volumen de la turbina de baja presión debe sumarse al de esta
tubería, 2), la resistencia de esta turbina se modela diferente a
las demás por las condiciones de presi6n existentes en la salida
de ella. Se considera al condensador como un proceso de presidn
constante, lo que simplifica la ecuacidn de Stodola de la siguiente
manera:
WLPl'h
donde : ,w
*PLP
V,ig(WL,)
= Flujo al Condensador.
..(2.16-ip)
..(2.17-ip)
wlpc= Flujo que Entra a la Turbina de Baja Presi6n.
Entonces el promedio de flujo a traves de la turbina de baja
presibn está dado por :
..(2.184~)
vLP,'("LPl+wm)
La entalpia que sale de la turbina de baja preei6n es :
h+,,=f12
(sLp)
hmohp-Efi, ( ~ L P - ~ * L W )
..(2.19-ip)
..(2.20-ip)
15
Con esto se cowlota la doriveción da las ocuacionos quo dofinon
los estados del vapor en los puntos da interlis, on las turbiws de
presión alta, intermedia y baja. Solo rosta calcular 01 trabajo
realizado por la turbina complota. Las variables mas importantoo
simuladas por el modelo son las presionos, taiperaturas, flujos de
vapor y entalpías en la6 entradas y salida6 do las diferontes
etapas. A partir de ostas últimas ( mtalpias) os posible
determinar la potencia impartida al eje por a1 flujo do vapor an
expansi6n.
2.8 POTENCIA UECANICA DE SALIDA DE LA TVRBINA
Esta secci6n presenta las ecuciones usadas on 01 programa para
calcular la potencia de salida de cada etapa de la tUrbiM y las
pérdidas mecánicas de todo el conjunto. Las ecuaciones se derivan
del concepto de cambio de energía del vapor a trav6s de las
diferentes etapas de Alabes.
Entonces :
....(2.1-pm)
(2.2-pm)
..
....(2.3-pi)
(2.4-pm)
(2.5-pm)
donde : Ihr,,,- Potencia Impartida al Ej. por los Alabes de
Impulso.
Uw,- Potencia Impartida por los Alabes de Reaccibn.
W,,= Potencia Impartida por la Turbina de Presi6n
Intermedia.
MuLp= Potencia Impartida por la Turbina de Baja Presi6n.
Uw,= Pérdidas Totales de la Turbina. Estas se reetan a
lam anteriores para obtener la potencia que mueve
al generador el4ctrico.
= Flujo en las Válvulas Gobernadorasi.
= Entalpla.
v
Flujo.
HP = Alta Praiibn (oubíndico).
IP
Presi6n Intermedia (subíndice).
Le = Baja Presi6n (subíndice).
BPI
Entrada de Alta Presi6n (subíndice).
Salida de Alta Prsoión (oubíndice).
HPE
LPo = Salida de Baja Preei6n (subíndice).
P
---
16
-.
2.9 ETAPA DE CONVKRSION POTENCIA VEWIDAD
De la ley de newton (Riereaimasa~acoloracibn),
rotatorio no describo por:
_"
- .
..
...
un sistema
FIGURA 2.5
SIsTapLrnXmKto
donde : J
a
T
--
'Ja
Momento de Inercia.
Aceleración Angular.
Par
.
-
-
ZT
Se sigue entonces, por analogia :
donde : Tturb
Tgen
Perd
v'
J
--
--
Jv'
Tturb
- Tgen - Pord
w ' -(Tturb-Tgen-Perd)/J
..(2.1-pv)
..(2.2-pv)
Par Gonerado por la Turbina.
Par Demandado por el Generador Elóctrico.
Pérdidas Mecánicas en e1 Sistema TurbinaGenerador.
Aceloracibn Angular del Rotor de la Turbina.
Inercia del Rotor de la Turbina.
De aquí, al integrar la ecuación de la aceleracibn, os posible
obtener la velocidad con que gira la turbina, que 08 e1 objetivo
principal del modelo.
El generador eléctrico se considera como una carga Conotante, gue
puede variar su valor. En otros términos, se considera al generador
como una perturbacibn de entrada a la ecuación para el cálculo de
la velocidad del eje de la turbina.
17
(i
PXSH-J
THSH-
Val-las
RoHSHmSH-
Wgv turb. -roaa- PHR turb WLFO
de
hHPE lon- - de .
hHP alta -tador hHR pros. WCD
-pres. THPE turb. -baja
int.
1
generador
pérdidas
mecdnicas
donde :
Las primera letra del nombre de las variable usadas significan :
--
P
Presi6n del Vapor.
T = Temperatura del Vapor.
h
Entalpía.
W
Flujo de Vapor.
H
Potencia Uecánica.
Ro = Densidad del Vapor.
Las letras restantes :
XSH
gv
IIP
HPE
€IR
-
Entrada de la Vdlvula Gobernadora.
.
= Vdlvulas Gobernadoras.
= Alta Presión
= Salida de la Turbina de Alta Presión
= Salida del Recalentador.
* Condensador.
= Presión Intermedia.
Lp
= Baja Presi6n.
HLPO
Salida de la Turbina de Baja Presión.
CD
IP
.
-
El bloque nombrado C W = conversión potencia mecánica a velocidad.
18
'
2.10 SISTEMAS GOBERNADORES PARA TüRBINAS DE VAPOR
El actuador, servorntor posicionador de válvulas, diulado por el
program u
t del tipo electro-hidraúlico. La justificación para usar
este tipo da acoplaiiento entre las parte da baja y alta potencia,
es que es el medio mas natural de acoplar un controlador
electrónico a la turbina. Un gobernador de velocidad electrohidraúlico proporciona una gran fluribilidad para el uso de
circuitos elactrónicoe y para acoplarse con computadoras, en lugar
de piezas mechicas en los lugares de baja potencia [ I ] .
El diagrama de bloquee de la figura muestra la configuración típica
de estos gobernadores. La retroalimentación de la presión de la
primera etapa (flujo de vapor, opcional) y la retroalimntacidn de
la posición de válvula en el lazo del servomotor dan una ventaja
de linealidad sobre los sistemas mecánico-hidraulicos. (grhfica)
Cvop
C p x
cv
SR
I
FIGURA 2 . 7
"h.
HODELO LINEAL DE
HXDRAULICO (EHC)
I
cvclort
tvnin
UN CONTROLAM>R ELECTRO-
en la gráfica (2.7):
SR = Valor de la Velocidad de Referencia.
w = Velocidad de la T u r b h .
mhp = Plujo de Vapor an la Cámara de Impulso.
Kpr,Ti = Pardmetros del Controlador.
CvoPn Y
Cvcloee = Valor de Saturación del Servomotor Posicionador de
Vdlvula Gobernadora.
cvmax y
Posiciones Límites de la Válvula Gobernadora.
cvmin
El bloque en blanco es un acondicioador de eefial.
-
19
2.11 CONSIDERACIONES PARA EL ESTUDIO DE EBTABILXDAD
Todas la6 turbinas d. vapor, dol tipo modelado, utiliaan válvula.
controladas por un gobernador de velocidad para controlar el flujo
de vapor en la ontrada de la turbina de alta preeibn. La chara de
vapor, el recalentador y las tuberías do cruce introducon retardos
entre el movimiento de las válvulas y 01 cambio do flujo de vapor.
Para los ostudios de astabilidad es donablo incluir estos
retardos.
Los cambios do presión a la entrada de las válvulas pueden ser
ímportantes an los estudios de ostabflidad. Los controladores de
presión del generador de vapor son diseñados para mantener esta
presión constante; sin embargo, la respuesta del generador de vapor
controlado, no es lo suficientemente r6pida para compensar las
variaciones de presi6n debidas al movimiento de válvulas. Entonces
es posible suponer que la presi6n del generador de vapor permanece
constante para el intervalo de tiempo del estudio de estabilidad.
El modelo no lineal de la turbina se sometió a pruebas con el
modelo de controlador (un proporcional integral ) mostrado en [3],
consiguiéndose los resultados mostrados en el capítulo de pruebas
a los controladores en forma de gráficas. Los tipos de experimentos
a los que se sometió este controlador fueron principalmente
rechazos repentinos de carga y cambios en escalón del valor de
referencia.
2.12 PROGRAMA DE
QJwpuTMoRA
El modelo matemdtico no lineal de la turbina, presentado
anteriormente se progra~6 en TURBO-PASCAL versión 5 . 5 , para
realizar la simulación del proceso en cualquier computadora
personal compatiblo con IEW-PC/AT. El programa muestra las
variable6 importantes del proceso en forma qrdfica; esto can e1 fin
de lograr una mejor visualización de 18 respuesta del sistema a las
diferentes clases de experimentos. Principalmente so consideran
variaciones on la apertura y cierra de las válvulas gobernadoras
( ocho válvulas distribuidas en cuatro grupos de dos) y variaciones
repentinas 4. carga. A este programa so le sometió a los distintos
tipos de prwribu promentados por el reporte Drexxel [ 2 ] lográndose
los mismos resultados; por lo que sa concluye que 01 modelo predice
satisfactoriamente el desempeño de de la turbina en cuestión.
--
u s unidades de las variables usadas en el programa son :
PlUjO
mm/.
Presión
= mia
Temperatura
= ‘R
Entalpía
Btu/ibm
Energía Interna Btu/Lbm
20
Llanoidad
Entropía
Area
Volumen
Potencia
-
-
W F t S
I
0
BtY/Ih-*R
etu/s
2.13 LINEALIZACION DEL MODELO
Para los efecto8 de disefio dol controlador @tia0 quo minimize 01
error y e1 seguinionto do referencias, casos que aa resuelven
minimizando la norpa y, eo necesario un modelo lineal; por io
tanto, el BodQlO no lineal se someti6 a una lfnealizaci6n numérica.
Se realiz6 una identificaci6n de los parhetros usando el Atodo
de mínimos cuadrados, del paquete de programaci6n MATLAB *control
toolbox*, siguiendo las recomendaciones de [3,4,5]. Este programa
utiliza los archivos de datos generados con el programa TURBINA.PAS
(modelo no lineal). Se *di6
un término de primer orden al modelo
presentado por [3], 6n la etapa de v&lvuias, con el fin de
minimizar el error entre las respuestas del sistema lineal y la
respuesta del modelo no lineal. A d d s , se tomaron en cuenta las
dindmicas del recalentador, recomendaci6n de [s]. Finalmente el
modelo se linealiz6 en tres puntos de operaci6n 50% (191500 Btu/s) ,
759(287250 Btu/s) y 1008(375000 Btu/s) El modelo lineal de turbina
tiene la estructura siguiente :
.
I
donde :
Gl(s), G2(s)
---
Modelo Lineal de Vdlvulas.
Modelo Lineal Turbina de Alta Premibn.
Nodelo Lineal de la Turbina de Presibn
Intermedia y Recalentador.
C5(S)
Modelo Lineal de la Turbina de Premibn Baja.
Gb(s)
Modelo Lineal Etapa de Conversi6n Potencia
a Velocidad.
imp = Constante de Converoi6n Flujo a Potencia de
la Turbina de Alta Presi6n.
G3(s)
G4(s)
--
21
Kip
Klp
-
Constante de Conversi6n Flujo a Potencia de
la Etapa de Presi6n Intermedia.
Constante de Conversion Flujo a Potencia
Etapa de Baja Presión.
Los resultados obtenidos, para los distintos puntos en los que se
linealizó el sistema, son:
Linealización en 100% :
Gl(s)-
0.35507
G2 (E)=
193.12
G3(s)=
-LlQ&L-
S+0.00440
s+l. 115
8
+
0.10415
G4(s)= 3 1 4 9
s+O. 15830
65 (SI=
G6(s)=
3.5287
m+4.1603
-
0.7672e 7
s+8.7090e-4
Khp=Ol. 192
KipP110.89
Klp208.81
donde:
e-n = .lo-"
la funci6n de transferencia global es :
5.098e48 '+2.303e -3s+1.4554e 3
ylal
U(S)
-
s6+5.6232s'+6.513s5+1.8208s'+1.8033e-lsL+6.627e-3s+5.6304e-6
-
donde: V(s) = Velocidad.
U(S)
Apertura de Válvula Gobernadora.
~inealizaci6nen 759 :
G~(S)- 0.23316
s+O. 00547
G2(s)5
43.387
s+O .22 135
22
-
G6(e)-
5.4371e 7
s+4.2045e-3
Khp95.019
Kiplll6.55
Klpl222.44
la funci6n de transferencia es:
YlaL
W(s)
-
5.81e -6s2+4.47e-6s+6.48e 7
se+9.65e-ls’+2. 07e-ls~+1.01e-2eJ+l.49e-4sL+8.25e-7s+l.51e-9
Linaializacibn en 50% :
63 i s ) =
G4(s)=
G5(m)G6(s)=
-
3.8479
s
+
3.8531
8+3.5073
9.61699
s+0.709311
s
-
1.8172e 6
9.1347e-4
+
Khpl94.92
la función ds transferencia es:
ylal
U(s)
Kip125.95
Klp-24 1.21
-
1.29e -3s2+i.86e -38+1.3
se+5.38118’+6.6354~*+3.0022s~+4.67e-llsL+3.16e-3e+2.50e-6
23
CAPITUIO 3
PACTORIZACION RACIONAL
El problema de control que se debe resolver, para una turbina de
vapor, es el diseño de un algoritmo que cumpla con lo siguiente:
estabilidad, seguimiento de referencias e insensibilidad a
perturbaciones. Este tipo de problema se puede transformar en uno
de mininización de una norma. Los espacios de Hardy proveen una
herramienta adecuada para la eolución de estos problemas.
Multiplicando la n o m a a minimizar, como se ver& mas tarde, por las
inversas de las matrices interiores, el problem se convierte en
A
s cercano a un sistema no
uno de encontrar el sistema estable m
necesariamente estable. Si la planta OS de fase mínima, el valor
absoluto resultante de la ainimización da la n o m a se aproxima a
cierto valor mínimo.
Si se utiliza una transformación bilineal de la forma
-
z=(s-a) (s+al-'
donde: a = Cualquier número positivo.
s Variable compleja de Laplace.
(3.1)
se preservan las normas: esto hace que solo sea necesario un solo
método de diseño, para los casos continuo y diecreto. A
continuación
se presenta el desarrollo para el disefio de
controladores en el espacio discreto (el desarrollo para el espayio
continuo es similar). Durante el desarrollo se define a q = z- ,
es decir se usa la unidad de atraso.
3.1 PLANTEAMIENTO DEL PROBLEMA
En esta sección solo se trata el probloma de los sistemas con una
entrada y una salida, como el caso del control de velocidad de la
turbina de vapor (para mayor información sobre los mistemas
multivariables vease [24,25,26]). El denarrollo que se presenta a
continuación se tomó de [25].
Se debe minimizar una función de costo de la forma :
-OD
donde :
R = Parametro de Youla (parhetro libre de diseño)
P,G y H = Dados por las caracteristicas de la planta y las
entradas al sistema (incluyendo el ruido).
24
ConsidOrese el siguiante sistema :
u1
I
1
FIGURA 3.1
SISTEMA DE CONTROL ENTRADA-SALIDA
El conjunto de todas las matrices de transferencia de (ul, i)a
(e,, %) está dado por :
El sistema mostrado anteriormente est& descrito por las siguientes
ecuaciones :
-
(3.4)
resolviendo estas ecuaciones las relaciones entre las entradas y
salidas ,son:
e
H(p,c)u
(3.5)
donde :
25
se define esto si8tua coa0 internamento ostablo si H(p,c)rZDLZ.
Entendiendose por estabilidad: entradas acotadas producen salidas
acotadas. Estabilidad en 01 sentido genoral implica que el
polinomio característico (en eote caso l+pc) tiene todas SUS
raices en el semiplano izquierdo caso continuo o fuera del círculo
unitario para el caso discreto. 2 es el conjunto de todas las
funciones estables en el sentido general.
Notese que ne puede definir la matriz de transferencia entre las
entrada6 externas y las salidas como:
donde:
Ambas definiciones son equivalentes y estan relacionadas por
I
H
- FW
,W
F-'(I
- H)
(3.10)
donde:
(3.11)
estas ecuaciones mueatran que
H es una matriz estable.
w
es una matriz estable si y solo si
Se puede demostrar que el conjunto de todos los controladores para
los cuales el sistema mostrado es estable, está dado por [ 2 5 ] :
S(P)
-
(
(q,+rdp)/(yo-q.) :
2 1
(3.12)
La ecuaci6n anterior recibe el nombre de parametrisacibn de Youla.
Si dos funciones polinomiales a y b en 2 son coprimas, entonces
existen las funciones x e y en Z tal que :
ats)x(q) + b(q)y(q) = 1
(3.13)
llamada por algunos identidad de Bexout, mientras otros la llaman
ecuaci6n Diofantina [ 2 5 ] . Como corolario se debe notar que la
soluci6n de (3.13) no es única cuando existe, como lo establece el
siguiente teorema:
26
'MDRENA 3.1:
Suponga que a y b pertenecen a Z y .on coprinos.
Suponga que x, ,yo son una solución particular de
(3.13).
ayO + by0
1
(3.14)
entonces el conjunto de todas la8 soluciones da (3.13) ostan dadas
por
t xl Y 1 =
(
[ x g , yo] + rtb ,-al: rcZ)
Esto implica dos cosas :
(3.15)
- si(s+rb,yo-ra)
r es cualquier función an Z , entonces el par
una solución de (3.13).
- Cada soluciónesde tambien
es de esta forma para algunas rrZ.
A
Lo anterior quiere decir que una vez encontrada una solución de
(3.13) , todas las soluciones están parametrizadas y son de la forma
(3.12).
Por calculos de rutina se puede demostrar que el sistema que nos
ocupa (sistema realimentado) está definido por :
(3.16)
--
donde: dc = Polinomio Denominador de el Controlador.
dp = Polinomio Denominador de la Planta.
Polinomio Numerador del Controlador.
nc
Polinomio Numerador de la Planta.
np
~(P,c) dc(q)dp(q) + nc(q)np(q)
A 6(p,c) se le llama ecuación característica del sistema de lazo
cerrado. ~l sistema es estable sitodas las raíces de 6(p,c) están
fuera del círculo unitario en el espacio dimreto (recuerde que se
usa la unidad de atraso para el desarrollo) lo que implica en
continuo que todas las raices de 6(p,c) están ubicadas en el
semiplano izquierdo. Para hacer que H sea estable y no contenga
polos en el circulo unitario, se seleccionan funciones xc, yc, xp,
y, tal que:
(3.17)
a7
Esta ecuación os idhtiaa para 01 caso oontinuo. La ocuación (3.17)
os del tipo identidad do Bezout y PU ~ l u c i ó nes (3.12) y sb puede
notar que 01 conjunto do solucionas 8010 dependo de oncontrar una
solución particular y del pardnetro libro r. Si so restring. r(q)
a un polinomio, entoncos se obtiono 01 conjunto do todas las
soluciones polinaiialoi posible.
-
si se sustituye
.
(+I++)/( y 0 - q )
(3.18)
en la expresion matricial de H(p,c) so padrá notar que cada
elemento de H es afín en el pardnetro r. Entonces es posible
diseñar en términos de r en lugar de hacerlo en t4rninos de c
(controlador).
Si se desea un detewinado criterio de funcionamiento, se
especifica una región en el plano complejo y se define a la función
como estable SE. todos sus polos están an esta región. Si a, b,
yo, son estables en el sentido general (todas las raíces de%
ecuación caracteristica que forman están situadas en el semiplano
izquierdo caso continuo o fuera del CírCUlO unitario caso
discreto); entonces el conjunto de todas las soluciones está dado
por (3.12); excepto que ahora r(q) debe restringirse al piano
especificado.
3.2 SOLUCION DE LA nInIn1xwnou DE LAS NOMAS
El problem es minbizar una función del tipo:
J=( 1 , 2 ~ j o r i * < , ~ i - ’ ~ i < i . i i ”)””
*
(3.19)
4
-
donde: w1 y w2 = Funciones que filtran a la entrada y salida
para determinar las frecuencias de importancia.
Denominador de la planta con el controlador C.
(l+PC)
Tambien se le llama funci6n de sensibilidad.
n = Indica de la norma (espacioil de Hardy [25]).
[: :I
Se usa en este trabajo la notación de semejmra:
G
<-->
Donde : A, B, C, E
-
Matricen de Reprosentación en Espacio de
Estado del Sistema.
28
fwci6n d* transferencia se urpros.
Para nuestro caso,
c
0 ( 8 )4 (A,
c viene
C, E)ic(.I-A)
"WE
dado por [251r
i---_--__
I Er
-BCr
Ar
<--> [A-TE;;-CEr)
--
por:
------------------I
Cr
(3.20)
.
Ropram~ntacibnen Espacio de E8bdO
del Parbetro Libre 6. Diseiio
Representacibn em Espacio de Eatado del
C(A,B,C,E)
Sistema a Controlar.
K = Matriz de Realimentacibn de Estado que
Estabfliza a la Planta. A-BK ea Ilurvitn
(raices en el semiplano izquierdo).
P = llatriz de Realimentacibn de Salida. A-FC es
mrwitz.
donde C(Ar,Br,Cr,Er)
Lae matrices K y P eon las soluciones de la ecuacibn de Ricatti
para una realimentacibn de estado 6 p t h y realimentaci6n de Miida
bptima, respectivamente.
De la ecuación (3.123, C viene d.do por :
0- (X-+DR) (Y--NR)"=
-
-'
(Y-RN-) (X+RD-)
donde : X-,Y-,D,R = Factorizacibn Coprima Izquierda.
Y,X,N-,DFactorizacibn Coprima Deracha.
(3.21)
Para las factorizaciones coprime vease ( 2 5 1 .
De (3.21), se deduoe:
(I+PC)-'-(Y--NR) D
sustituyendo esta igualdad on (3.19),
vuelve
w1 (Y--NR)Dw2
Donde:
1;
f
I
In
la funcibn a minimisar se
(3.22)
= Integral (3.19).
n = Definido en el rango [1,-], índice da la
integral.
29
Para lo8 caeos mas umualea n 08 2 o a. ~i minimizar la IK>M de la
expresión do arriba para n-2 ( p r o b l a %), el d O 8 v f i O del
controlador 80 concontra alrededor de UM s a h l upecífica. si se
requiere un desenpfio unifoneniento b u m 0 sob- w colwción
grande de salales, so habla de minimizar la n o r m con n- (problema
w
El problem e8 pues Mcontrar entre e1 conjunto de controladores
daüo por la solución de la ecuación de Bezout aquellos que
minimizen la norma dada por la ecuaci6n (3.22), que es de la forma:
(3.23)
Donde:
R
P,G,H
a
m
Parhetro Libre de Diseño.
Determinados por las Carateristicae de la Planta y
sus Entradas.
Antes de pasar a presentar el método de ainimieación es necesario,
definir las funcionee interiores y exteriores y la factoriiación
interior-exterior de una funci6n.
3.2.1
m C I O N E C INTERIORES Y EXTERIORES
Una funci6n F(raciona1) es interior, en el caso discreto, si y solo
si :
P (q-') P (q)-1 para toda q
Para el caso continuo una función es interior,si y solo si :
F (-0) P (8)-1 para toda s
Una función F(raciona1) es exterior, caso continuo: si no contiene
ceros en el semiplano abierto derecho) puede tener ceros en el eje
jw.
.
En el caso discreto, la funci6n es exterior: si no contiene ceros
en el interior del circulo unitario, puede tenerlos en z = fl
Al multiplicar una función por UM funci6n interior no 88 altera
la norma de la funcibn original. En teoría de Circuitos se conoce
a las funciones interiores, como funciones pasa-todo; una
multiplicación por este tipo de funci6n no cambia la magnitud,
aunque si introduce cambios en la fase.
30
3.2.2
IrACIYRI8ACION IwTERfOR EXTERIOR
Una funcion f racional me puede faatoritar en
-
donde: f, = Interior.
fe Exterior.
f-f,fo
se presentan ejuPp108 para los caso.
respectivamanta.
A continuación
continuo
discreto y
a) Discreto.
, sea g ( z )
la factorizacion interior-exterior es :
I Z+O. 21
(l+O.ZZ)
s,(z)=
la factorización se realizó agrupando los ceros que están en el
círculo unitario en el factor interno, por medio de un producto
de Blaschke de la forma:
n
f(r)=ITI- (2-a,) (l-a,t)-'
14
la factorización interior-exterior es Jnica excepto por la
posibilidad de multiplicar el factor interno por un nilipero complejo
de magnitud 1.
b) Continuo.
Sea f(s)
su factorizaci6n i-a(interior-exterior) es :
f,(s)= AELL
(S+U
31
A q u l tarbion so us6 un producto de Blamako para agrupir lo. aero.
do la función que so oncuontran on 01 ouiplano dorocho# la form
de este nuevo producto es
3.3
IIINIIIIZACION DE
LAB WORNAS rC, y R.
Para el caso H,, el problema es minimizar
J=I
If-srl
I2
paso 1 : factorice la función g en gigo (factorieación interior
-exterior)
.
paso 2 : defina g:=l/g,
paso 3 : multiplique por g , para convertir el probloma en uno
de encontrar el sistema estable mas cercano, a otro no
necesariamente estable. Esta multiplicación preserva la
norma.
paso 4 : expanda fg,. en fracciones parciales, donde fg+ denota la parte estable de fg, y fg. es la parte inestable.
J=
paso 5:
I Ifg.+fg+-q I I 2
El primer tórmino eo completamente inemtable, mientras
que la segunda parte es completamente estable. En el
espacio H, las partes estables inemtables son ortogonales, lo mejor que i e puede hacer em la parte estable
igual a cero. La definición formal del espacio H, se
puede ver en [ 2 5 ] .
haga q=fg+. p e d e no ser posible encontrar una r
tal que r-g0 q pero ee puede escoger para que este lo
suficientomente cerca, con lo quo se amegura
I ~f-gigor~
l 2 muy cerca de I lf-g,ql 1,
32
con esto queda solucionado al problema da BinfiiZaCidn da la n
om
%.
A continuacidn se prasenn o m 5.
la 8oiuoi6n do la iinfiizacidn do la
pa80 1 : realize los pasos 1 hasta 4 da1 apartado antorior (iiniii-
zacidn I $ ) , hasta tonar la norma da la form
J-I
I fg.+fg*-ql Io
defina Q=fg+-qde lo quo reulta
JlininI Ifg.-QI I--minI IN-QI Io
Ahora el problema es encontrar el sistema estable mas prdxi00 a
otro completamente inestable, como se mencionó al comenzar este
capitulo. A continuacidn se presentan muestran dos técnicas para
llegar a la solucidn de este problema.
Nétodo 1 ( 2 5 1 :
-
1: obtenga una realieacidn balanceada del sistema
N(s)
ZH(-A,B,-C,E) -->C(Ab,Bb,Cb). Una realization balanceada es aquella cuyoa gramianos de oontrolabilidad y obser-
vabilidad son diagonales a igualee.
2: obtenga los gramianos de controlabilidad y obsarvabilidad, re-
solviendo las correspondientes ecuaciones de Lyapunw.
(-A)WC
(-A) 'WO
+
WC (-A)
--BB1
+ WO(-A) = -(-C) (e)
'
3: efectae una factorizacidn da Cholasky
Wa-R R
4: puesto que RWcR' es simbtrica y positiva definida puede diagonalirarse por una transformacidn ortogonel. Escoja U tal quo
donde
C
es diagonal.
RWCR 1 -&I
1
33
5: defina T-R%a1f2
e1 sistema balancoado está dado por
donde: T/
-
T-'
6: una vez que encontrada la raalización balanceada, e1 canino
para encontrar el sistema estable pulo cercano a I es directo.
Antes de aplicar al siguiente paso es necesario hacer cuadradas
las matrices del sistema con columnas y renglones de ceros.
Estos ceros estarán presentes en el sistema estable obtenido,
asi que se pueden descartar en esa etapa. Permute las variables
de estado si es necesario para expresar a C de la forma:
--
donde :
a
r
C2
7:
Valor singular mayor de C.
Multiplicidad de este valor.
Matriz que contiene a los d d s valores do
estrictamente menores que u.
bI
C
forme las matrices
A=
,5
,C- [Cl C21
donde : las dimensiones de All son rXr y todas las demás matrices son coiiipatiblas.
8:
construya matrices ortogonales tal que
B1=TbSVbn ,c1=TTc8Vcn
se puede demostrar que los valores singulares de 81 y C1 son
iguales.
34
9: Defina
10: defina
r
-
u--vcvb'
(~2)'
- 21
4
El oiotema estable mas peóximo a H esta dado por
M- <-->
-
donde :
A- =
BC-
E-
0
rag(2-2' + ~ 2 ~ 2 2 x-2OC~'UB~'
r-'( Z2B2 + oC2'u )
C2C2 + ouB2'
-OU
Hétodo 2 [25,26] :
Se sabe que la distancia entre un sistema estable y otro no
necesariamente estable, es igual a T (valor Singular mayor, de la
matriz infinita de Hankel, el cual e8 igual a la raíz cuadrada del
valor propio mayor de WcWo (251).
1: realize los pasos 1 haota 4 de la iiniaización de la norma
Haga T = fg
%.
2: sea C(A,B,C) una realización minima de fg.
--
3: resuelva las ecuacioneo de Lyapunov
+ Hñ'
An
encuentre
T
+
A'W
L"*(ww)
5
r
WA
BB'
C'C
: raíz del valor propio mayor de MW
encuentre
MWU
-
WMv =
4: defina
rt
r%
(vectores propios de 1Iw y Wn)
f = C(A,v,C,O)
C(-A',V,B',O)
g ,=
35
presentaron los d t a d o a do soluci6n dol probloma do filtrado y
seguimiento 6ptimos, por d i o de l a miniiitaci6n de normas on ion
mpacios do Rardy, on 01 pr6xim capítulo EO aplican estos métodos,
ai niodeh lineal de la turbina de vapor.
S.
36
CAPITWIB 4
DUERO DE Los CONTROLAwRE8
En este capítulo ae pirsenta la aplicación de los 86todOs descritos
en el capítulo anterior. El p r h r paso es encontrar los
controladores que utabilizan a la planta, o lo que es lo mismo,
el conjunto de soluciones a la identidad de Bezout. El controlador
que cumple con estas premieas, de aauerdo con lo visto, esta dado
por :
cp <-->
1
F
-
(K-CEr)
-BCr
-
1
P-mr
Br
1
.
Parbetro libre de diseño
Representación en espacio de estado del
sistema a controlar.
Matriz de realimentación de estado que
estabiliza a la planta. A-BK ,e8
Hurwitz(raices en el semiplano
izquierdo).
Matriz de realimentación de salida. A-PC es
Hurwitz.
[o
Si Cp (controlador) lo definimos como :
Cp
<-->
;]
4.1 DISmO EN EL PUNTO DE 50 2 DE OPERACION NONINAL
El modelo lineal usado para sintetizar 01 controlador es el
presentado en 2.13 (linealizaci6n en 502).
~l primer paso es resolver las ecuaciones de Ricatti para
determinar K y F.
se obtuvo :
KIt1.4527 8.3722 14.23 11.508 4.991 11
-PI[
0.0087132
O .O024705
-0.1244900
O. 5580700
O. 1685200
142.5000000 ]
Da aqui en adelante 80 ueard la reprecrentaci6n en forma de funci6n
de transferencia o la reprosentaci6n on ospncio de estado, .egun
convenga, para un ahorro de eapacio y mayor claridad.
Ueando como parámetro libre de diseño Gr(e)=Z(Ar,Br,Cr,Dr)
:
6uetituyendo en la f6rmula del controlador emtabilizador ( 4 . 1 ) ,
reeulta:
Cprk.8g7+7.4
'+22. -68
'+4.548
2+
p+o.oppz
+ 1 8 . 0 7 ~d
++
11
5 83.. 9 8 ~ . 4 8 ~ + 2 6 1 3 . 6+84 8 2 6 . 5 d + 5 0 6 7 ~ . 8 ~ + 7 2 9 . 2
donde b 2 3 1 . 2 9
El siguiente paso e8 formar los t6rminoe f y g ,que aparecen en la
norma a minimizar ( 4 . 2 ) . Estos valores dependen como ya 8e vi6 de
los parámetros &a la planta y de la soluci6n de la identidad de
Bezout.
Usando la factorización doble coprima derecha
donde :
w l ,w2 = (s+100)-'
y
C(A-BK,F,K,O)
NX(A-BK,B,C,O)
D- Z(A-BK,B,-C,I)
R ,r * p a r h t r o libra de disaño
.
(4.2)
suetituyendo lo anterior la ecuaci6n (4.2), sa obtiene:
f=ndf ddi"
g=ndg dag-'
ndf-8'2+21 .fíle"+alj. 89e'0+13~089+5171.
68a+13166s7+2083586+20910m5+
132128 +5046~18+1078~36+107~168+1~656
ddfie" +221.45dS1' +14!504S(T +2.585905$'
+2.4042e6p'0 + l . 4 0 5 1 e ~ s 9
+5.4359e7f+1.352200S2 +2.071308E +1.9889e88 +1.1776e8S +
4.0609078 +7.3966068 +5.067705s +0912.4
ndg-L. (S*+17. Z3s7+140. 14a6+691. 21e5+2110. 984+3600.48'+3700.282+
'2142.6s+607.98)
: k-1.29920-3
ddcps" +221.45t1' +145048:
+2.585985$' +2.4042e6p'0 +1.4051eZs9
+5.4359e7y+1.3522e8s2 +2.0713088 +1.9889eüs +1.1776e8S +
4.060907s +7.3966e68 +5.8677e58 +8912.4
38
El paso eiguiente en los dtodos do iiniiiZaCi6n do las normas em
hacer una factorieaci6n intorior-sxtorior do Ig* , do la toma
rnigo
go-ndg*ddg-' rg,- 11
multiplicando la norma por g,-'
J-inl
I fg,.-ql P
fg;-fg-Rdf
sddi-1
Enseguida, en caso de ser necesario, so deearrolla en fracciones
parciales fg para soparar las partes emtable e inestable. Cuando
la planta es de fase i í n h y estable, con todos SUB caros en el
semiplano derecho, el producto tg no contiene ceros en el semiplano
izquierdo y e1 factor intorno g, es la unidad. Dado que el nodelo
lineal de la turbina es de fase mínima los últimos paoos de la
minimización no tionen que efectuarme, y el valor óptimo del
parbipetro
est& dado por:
P f g . (ddg.ndg-')
Dado que el grado del numerador resultant. es mayor que el grado
del denominador, el valor de *r* es una función de transferoncia
impropia, fisicamente irrealizable. Esto tiene como consecuencia
que el controlador @timo es imposible de implementar; sin embargo,
em posible lograr un desempeño muy cercano al óptimo definiendo a
$rede la toma
I
;
ldonde n representa la diforencia o grado relativo entre el
;numeradory denominador de Ir*. A medida quo el valor do c tiende
, a,'O
el desempeño del controlador tiende a 8er 01 6ptimo. Para
'este caso se escogi6 un valor do r-0.001, considerando que, un polo
;multiple colocado mas all4 de los 100 Hz. no atocta el desempeño
del sistema, pues los tiltroe wl, w2 que pesan entrada y salida de
,la norma son pasabijos con una frecuencia de corto de 100 Hs. El
valor del pardmetro libre de diseño resulta
I
m n r . dr-'
en este término se ue6 01 polinomio h(s)=(O.OOlm+l)"
un controlador fisicamente realizable.
para lograr
n m elí +1.4912~1S" + 9.183?81610 + 3.12~peas~+ 6.726pe2sa +
9.8715e2~7~+ 1.033902s + 7.8718e2s + 4.348602s + 1.6961e2mS
+ 4.366026 + 6.2943s + 0.29248
39
, dr- al2 +4.0081$13S11 + 6.03peás" + 4.y4e9ss + i.q3240i~s8'
+,
8.1541e12s ,+2.4164013s +3.986e13s +4.1073013s+2.7792013s
+ 1.129e13s + 2.5141e12s + 1.3940011
sustituyendo oste valor on la fórmala
controlador óptimo cp
(4.1),
.o obtiene el
s-sl' +251.58s1' +9.284705s:
+1.4003~s15,,+9.3499011s~ +2.439014s1:
+3. 1964e5s1~+1.7á76e16e,+5.38970169 +1.0613017$ +i.44340i7sS
+1.4069e17s2 +9.9027016s +5.095016s
+6.2454el4s +4.5537e13e +1.2711012
+1.8299e16s
+4.3600.15s
+4015.1s1::6.
0605ebs'' $4. 0910e9s'' j J . 0610e12s149+1.5491a13s1~
+9.8658e13s7 +3.65a4e14s6 +9.0309e14q +1.6055e15~+2.1447e15sS
+2.2052e15s2 +1.7629e15s +1.0926e15s +5.1609014s +1.7890e149
+4.2180e13s +5.7161e12s +2.5842e12
, dcp-S1'
I1
!
El desempeño de este controlador se puede observar en la siguiente
sección, comparado contra el controlador PI electro-hidratilico.
El controlador mostrado se diecretizó usando un tide memtra
de 0.02
segundos; el tiempo de muestreo del controlador en al
programa tambien es de 0.02 segundos. En varios experimentos se
observó la repercusión de variar e1 tiempo de muestra de
discretizacidn y de muestreo de control. La variación en e1 periodo
de muestra de discretización no afectaba significativamente el
desempeño del controlador. La variación on el periodo de muestra
de control si tiene efectos muy notables, principalmente en
oscilaciones de estado estable. La amplitud de esta oscilación
aumentaba proporcionalmente conformo disminuye la frecuencia de
muestreo: luego de varios experimentos, se llegó a la conclusi6n
de que el periodo de muestra que mostraba mejor desempeño ora 0.02
segundos. una conclusión oxperimental solamente.
Los archivos conl.dat, con2.dat y con3.dat (disco blando anexo)
contienen a los controladores discretos disoñados en los puntos de
operación 50,75 y 95 8 respectivamente.
Los tres controladores difieren mucho en cuanto a la ubicación de
sus polos y ceros, los modelos lineales a partir da los quo se
obtuvieron son tambien muy distintos: sin embargo, las respuestas
obtenidas con e1 modelo no lineal y estos tres controladores son
muy similares. se pudo comprobar experimentalmente qUe Se puede
usar un solo controlador en todo el rango de operaci6n de la
turbina.
4.2 PRUEBAS DE LOS CONTROLAOORES
A
continuación, se presentan algunos resultados de las pruebas
40
!
roalizadam con 01 iodmlo no linoal do la turbina inaorporando a
omte los dom controladores. Llamaramom CD a1 controlador diuAado
por 01 i ó t o d o de factorizaci6n ostablo, mo urn6 01 controlador
disomado on el 50 8 do operación nominal, y EHC al controlador PI
olectro-hidrdulico. I a m valorem para mintonlzar 01 controlador IPIC
me obtuvieron da [ 3 ] . Lorn tipor, de prueba que se conmidoraron mon:
rechazos de carga repontinom y cambiom on oscal611 on la velocidad
de referencia.
:K/
Prueba 1 : Cambio en emca16n on la velocidad de reforencia
de 377 a 360 rad/s. Turbina operando al 100 8 de
su capacidad.
I
i!
o(0
sol
O
m
I
&.)+O
m
SD
m
PI4.1
Respuesta del modelo no lineal con
e1 controlador EHC.
I!
nl
D
o
4n
pli./(D
m
m
m
FIGURA 4.2
Respuesta del modelo no lineal con
el controlador CD.
41
FTwba 2 : Rechazo repentino d. carga dol 15 por ciento (375000 a
320000 Btu/8 ,1000 Btu/esg.1.055 llegavata).
o
wa
!Jo
=.I*
m
Figura 4.3
Respuesta del modelo no lineal con el
controlador EHC
.
-..
O
Figura 4.4
20
4a
s.tm
ao
80
rm
del modelo no lineal con el
controlador CD.
Re6pUOcita
42
.
Prueba 3 : Rechazo do carga dol cincwnta por cionto (375000 a
187500 Btu/..gwido)
O
50
8&./10
1m
150
Figura 4.5
Respuesta del modelo no lineal de la
turbina con el controlador EHC.
O
50
m.im
Mo
I
150
Figura 4.6
Raspuesta del modelo no lineal con el
controlador CD
.
43
P
-
-
-
-
-
44
CAPITULO
a
DISE80 ELECPRONICO DEL CüNTRO-R
Una tendencia actual es 01 USO cada voz mayor de sistemas
digitalest otra tendencia muy acentuada es el u.o de1 computador
personal compatible con IBn-PC/AT. Siguiondo esta pauta, el diseño
del controlador en su parte electr6nica se realiz6 por modi0 de una
tarjeta de entrada/oalida anal6gica insertable on una ranura del
ducto de este tipo de computadora. E s t a tarjeta se construy6 y
probó, programando un PID discreticado, e implementando varios
tipos de lazos de control de posici6n y velocidad, con un sistema
de motores sencillo.
El método para implementar el controlador (PID del motor) en la
computadora fue :
.- continuo
se obtuvo la función de transferencia en el espacio
del PID .
b) .- Se discretiz6 esta funci6n de transferencia por medio
de una transformaci6n bilineal .
a)
.- Desarrollo
de la funci6n de transierencia discreta en
fracciones parciales.
d) .- Programaci&n directa de los t6rminos de la funcibn
desarrollada.
c)
e)
.- manejo
del programa de control por m d í o de una interrupci6n
(IRQ3) de la computadora. Se us6 una hterrupci6n disparada
por un oscilador externo para mantener 01 tiempo de muestreo
y actualizaci6n constante.
Siguiendo este método es posible implomentar cualquier funci6n de
transferencia discreta (como el controlador CD que se desarro116
minimizando la norma y); siempre y cuando el procesador pueda
efectuar todas las operaciones necesarias para el control antes de
que se presente de nuevo la interrupci6n. En el anexo ee oncuentra
el progrma de control para el motor (pM2.PAS) ; en 41 se puede
observar claramente el manejo de la interrupcibn. Para sintonizar
este PID se us6 un procedimiento de prueba y error; el proceso de
ajuste es breve debido a la interfaz gr61ica del programa p M 2 . PAS.
45
5 . 1 DEE)CRIPCION DE
UL TARJETA
El diagrama a bloquos dol sistema de entrada/salida desarrollado
es :
IR03 6---FREQ DE I)(TERRüñIíN
FIGURA 1
DIAGRAMA A BXDQüES DEL SISTEMA DE ENTRADA- SUDA
PARA COMPUTMORA COMPATIBLE CON IBX-PC.
La parte referente a la lógica de interfaz con el ducto de Pc es
la mas importante en la tarjeta; es la que realiza el protocolo de
entrada-salida de datos, es decir conexión y desconexi6n al ducto
de datos de la computadora, decodificaci6n de direcciones y
decodificacidn de señales de control. Las señales de control para
activar las conversiones A/D y D/A se dan por medio de
instrucciones del programa (veaee el anexo Wanual de uso (tarjeta
entrada salida)" ). Las partes de convorsi6n A/D y D/A se limitan
a dos circuitos integrados dedicados (ADC1205, DAC1235) de 12 bits
de resolución. Las señales para inicio de conversi611,muestreo y
actualizaci6n de la salida analógica, se dan por programación desde
la PC. La frecuencia máxima de muestreo es de 9 Khz y est6 limitada
por el tiempo de conversi6n del DAC1205 (109 nicroeegundos).
Se toman del ducto de la pc las siguientes setiales :
DO a D7 : Ducto de datos.
a A9 : Ducto de direcciones (solo so usan estos 1 0 bite en
A0
AEN
los cicloo de entrada salida de puertos).
: Habilitador de direcciones (indica que la unidad de
manejo de memoria (DMA) no controla el ducto.
46
IOR
IOW
IRQ3
CLK
Se habilita on un ciclo d. laatura da puertos.
: Se habilita on ciclo da eaoritura do puertw.
I Raquiara la internipaibia d.1 tipo 3.
: Reloj de la Pc
I
.
aáein6s se toman las lineas de alínontacibn f5 volts
.
Para lograr que el tiempo de muestrw porianezci constanta, aún
cuando se alteren parbetroe colo largo del programa (adición de
rutinas de graficado, etc. ), a1 muestrao u realiza por medio de
una interrupción (laQ3), programada para entrar con un tiempo
predeterminado. Es posible usar un valor alto da frecuencia de
muestra (f>lKhz): existe a1 riesgo de volver a la coiputadora muy
lenta por el hecho de estar atendiendo a la interrupción de la
tarjeta muy frecuentemente. Un valor bueno de freauencia de muestra
para esta tarjeta es del orden de 200 Ha. y meno~u.El tiempo de
muestre0 se puede modificar ajustando la frecuencia de un oscilador
externo.
Partiendo de la filoeofía de esta arquitectura, es muy sencillo
remplazar la PC por un microcontrolador de la familia 8051 u 8096,
y programar memorias EEPROn (u.rPorias de solo lectura programablee
eldctricamente). Haciendo e*-,
se reduciría al mínimo la cantidad
de componentes electrónicos necesario# para la implepentación del
controlador.
Para adecuar las señales de salida de la tarjeta a las requeridas
por los senaores y traneductoree de la turbina, solo son necesarios
unos amplificadores operacionales de instrumentación (no se
muestran en el diagrama electrónico) y reforzadores de linea de
transmisión de sehal.
5.2 FUNCIONAMIEWTO DE U TARJETA DE
SUDA
La 16gica de control de aonexión y desconexi6n al ducto de la PC
se logra por medio de las señales BüSen (habilita la entrada y
salida de datos) e IORen ( indica la dirección da transferencia de
los datos). Para controlar las conversiones aMi6gico-digital y
viceversa sa usan dos selectores 74IS139 que genoran, controlados
por programación (ver listados de los programas), las setbles
IOR300 a IOR306,1OW300 a IOW306.
Para identificar las senales, aquellas cuyo nombro empieza con IOR
controlan al convertidor analbgico-diqital y las que empiezan nu
nombre con IOW controlan la parte de Salida (digital-aM16gica).
En el diagrama ne pueden notar varios circuitos integrados:
74IS123, LP398 ,LP357N. El priuero, un monoestable, proporciona e1
tiempo suficiente para que las aeiíales mucho mas rápidas que vienen
de la PC logren activar al ADC1205, el segundo es un muestreadorretenedor y el tercero (amplificador operacional con entrada FE")
\
47
so iua para convertir l a MU&, do m y baja corrionto,
da1
convortidor digital-analbglao on un nivel da voltajo u t i l i i a b l o por
l a parta do t r a t u i e n t o do s4nal. E l oontador 741L890 ostb
configurado caso un divisor do froouumia (Cll(/lO), quo drvo do
r e l o j a l convertidor analbgicodi9it.l.
lari potenciómetroo QU. 01 pue&n notar on o1 cirauito son:
a).- Ajusto do l a tranefoión a aero del oonvortidor A/D.
b).- Ajusto del Wiw, valor do voltajo de salida do1
convertidor O/A.
puede despreciar estos ajustes, pue8to que solo son ü t i l u on
los extrows de las encala6 de oonverui6n y no af.ctan l a
linealidad de l o s convertidores. Las e8pcifIcaciones t*cniCas de
l a t a r j e t a disefiada n pueden uicontrar on o1 MIYO.
So
El objetivo principal do la tesis fue explorar la posibilidad de
cambiar mistewas d e control de carga-vel0cid.d analbgicos de
turbinas de vapor por un sistema de control digital. Con oste
prop6sito, en e1 desarrollo de la tesis, SO obtuvieron los
siguientes rosultadw:
a).- Progruaci6n de un modelo no lineal de una turbina de vapor
para simular en una computadora personal oompatible aon
IBn-PC/AT.
b).- Interfag amigable del programa del -10
110 l i m i .
c).- Lineali%ación del modelo de turbina.
d).- Incorpotacibn a la simulaci6n do un controlador del
tipo electro-hidrciulico.
e).- Disefío de loa algoritmos d e control de velocidad por el
método de factorización racional.
f).- Incorporaci6n de este controlador al program del modelo
no lineal de la turbina.
g).- Pruebas de los controladores con el modelo no lineal.
Diseño y prueba de una interfaz general zOñ-PC/AT adecuada
h)
para el control de procesos anal6gicos (tarjeta de entrada
salida anal6gica).
.-
Para medir el desempeño del controlador dimeñado se tomaron en
cuenta dos criterios.
1) ~a norma IEEE 8 t d 122-1985 [ I ] . Esta enumera las recomenda.
ciones fUnCiOMleS y características de1 des.mpeAo para los
sistemas de control de turbinas de vapor.
2) El desempeño del controlador electro-hidráulico. Seton6 este
criterio de comparaci6n, puesto que la n o m [ I ] 110
especifica las ccaracterísticas de la respuesta transitoria
del control de &a turbina; a d d s , este es e1 sistema de
control anal6gico más comiln en este proceso.
6.1 DESO
DE U S CONTROLkDORgs
continuaci6n se enumeran las observaciones que surgieron al
probar el controlador CD, comparando m u desempeño con el
controlador electro-hidráulico (EHC).
A
Para ‘los distintos tipos de pruebas (perturbaciones do rechaao de
carga y cambios de referencia) el controlador CD presenta un
sobretiro pequeño. Este sobretiro no se encuentra en el controlador
EHC. Ian tiempos de asentamiento (estado estable) de ambos
controladores son ahilares.
49
' El orror do ostado utablo u mayor on el controlador HIC, 8u valor
os de aproxiradannto 1 R ó d / i e g . , iiontrao 01 o m r do utado
ostable dol controlador CD o8 de 0 . 1 rCaa/sq.
.
El controlador CD pro-taba
una oscilaci6n de estado ostable; ó8ta
eiiiinó añadiendo una pequeña zona muerta a la ontrada del
controlador.
188
El controlador CD e8 -table para todo el rango de carga-velocidad
de funcionamiento de la turbina.
EL controlador EHC presenta en algunas zonas de caw8 oscilaciones
que no se pueden eliminar ni añadiendo zona8 mertmr el elbinar
estau oscilascionee es la principal ventaja dol controlador CD
sobre el EHC.
Variar el tiempo de muestreo modificaba la amplitud de la
oscilaci6n de estado estable en el controlador CD! al disminuir la
frecuencia de muestreo aumentaba la amplitud de la oscilación.
Despues de varias pruebas se pudo notar que el tiempo de -entra
adecuado era de 0.02 eegundos.
El controlador CD cumple con todas las especificaciones de la
norma; algunas de ellas son :
Estabilidad
.-menor
la 08ailaci6n sostenida en carga y velocidad
quo 0.01 % de la carga y velocidad nominales.
08
Regulaci6n .-se puede obtener el porciento de regulación que se
desee, aumentando o disminuyendo la amplitud do la
zona muerta del controlador.
Sobrevelocidad
para una pérdida da carga total el controlador
cierra las v6lvulao gobernadora8 en aproximadanente
30 segundos, recomendaci6n de 141.
Ajuste de velocidad
es posible ajustar la referencia de voiocidad a un valor mucho mas bajo del 95 Z de la Velocidad nominal
al controlador presenta una zona muerta en carga
Zona muerta
velocidad del 0.02 Z nominalos. La norma oepecifica
0.06 8 máximo.
.-
.-
.-
.
6.1 ANALISIS DE VENTAJA8 Y DESVEN'fAJa
DEL CONTROLkDOR CD
continuaci6n se presentan las principales ventajas y desventajas
de este tipo de controlador.
A
Ventajas :
-No se necesita sintonizar n i m n pardmetro del controlador.
50
-Es robusto a los erroros de modelado. Emts hocho so puedo observar
claramente en el trabajo, puesto que los trem controladoros
diseñados por e1 método de factorizacibn racional tienen un
desempeño similar! a h cuando los modelos linealom a partir de
los que BB obtuvieron tienen sus polos y ceros muy dimtintos.
-8eguiento de referoncias y mihimizaci6n de los efectos de lam
perturbaciones casi 6ptimos.
-Estable para cualquier entrada acotada.
Desventajas :
Solo se puede enumerar um: e1 alto grado do la funci6n de
transferencia del controlador. Este problema se solucion6
recientemente [ 2 4 ] . El grado del controlador que se obtiene al
minimizar la norma por este método es menor o igual al de la
planta.
Por todo lo expuesto se concluye que el desempeño del controlador
CD es superior al del EHC.
6.3 TRABAJOS FUTUROS
Un trabajo que vale la pena desarrollar es incorporar el modelo del
generador eléctrico a este modelo y relizar un control
multivariable del conjunto.
Tambien se puede desarrollar la interfaz para una computadora e
implementarlo en una planta real; el m6tdlo a seguir podría ser el
siguiente:
1) Identificaci6n de los parámetros de la planta directamente
de las mediciones hechas con la interfaz de computadora.
12) Diseño del algoritmo de control por medio de las metodologías
más recientes, que permiten obtener controladores de orden
reducido.
3) Prueba.
Dado que mucha de la inetrumentaci6n necesaria para llevar a cabo
este proyecto ya se encuentra instalada en el proceso, medidores
de presión, frecuencia, voltaje, velocidad etc. , el costo del
cambio a un control por computadora es mínimo (se puede decir que
solo es necesario comprar la computadora y la interfaz).
51
REFERENCIAS
Modelado de la turbina de vapor ,inforraci(in sobro turbinas da
vapor.
[I] Hector Ocampo, José L. Oonsdlos R. S. ,* Hod01 of a steam
Turbina", IEEE-IIB Conferenco on Power Plant Modelling and
Simulation, Cuernavaca, Horelos, I(lWic0.
[21 K. C. I(alnitsky, H. G. Kwatny, "Developement and Implementation
af a First Principle Model ai a steam Turbine", DreXel University research project no. 545, üynamic simulation of
a Nuclear Power Plant. Drexel University Research Report no.
76-545-1, enero 1976.
[31 IEEE Committee Report, ADynamicModels for Steam and Hydro
Turbines in Power System Studies*,IBEE transactions PAS,
Vol. PAS-90, NO. 6, Nov. 1973, p. 1904-1915.
[4] IEEE Recommended Practice for Functional and Performance
Characteristics of Control System6 for Steam TurbineGenerator Units, IEEE Sta 122-1985
.
of
Control Systame*,IBEE-IIE Conference on Power Plant modelling
and Simulation, Cuernavaca, Morelos, Héxico.
[ 5 ] Janusr A. Kubiak, wUodeling of Turbines for Analysis
[6]
Horowits, I. M., Shaked, U., "Superiority of Transfer
Function Over State-variable Methods in L i n u r TimeInvariant Feedback System Design". IEEE Trans. on Automatic Control, Vol. AC-20, No.1, feb. 1975.
[7] MC Donald, J. P. Rwatny H. G. , and Spar. J. H., *A Nonlinear
Model for Reheat Boiler-Turbine Generator Syeten", part 11,
Development, Proc.12 th Joint Automatic Control Conference,
1971, pp. 227-236.
(81 Mc Donald J. P. Kwatny H. C., *A Hathematical Model for Reheat
Turbine-Generator Systems", IEEE winter Power Heating New York,
Enero 25-30.1970.
[9]
Masada C. Y.,"Hodelling and
Control of Power Plant Boiler
Turbine-Generator Systemsw, PhD Thesis, NIT, Nov.1979.
[io] Young ~.c.,"Equipment and system Modeling for Large-Scale
Stability Studies", IEEñ Trans. PAS, Ene./Feb.1972.
[11] Dwarakanath M.H.,
et. "A Generalized Methodology for
Wodeling System components in Power System Dynamics
simulation", IEEE Trans. PAS, Vol. PAS-101, No.1. Enero
1982.
52
Xodolling of Powor Plant Turbinoe for
Controller Dosing" , Appl.Xath. W e l l i n g , Voi.4, pp 109-112,
Abril 1980.
[12] Ray, A.,"Dinamic
of Litoraturo on S t o m
nirbine-Gemerator Control Systemem. IEEE Traneactione on Power
Apparatus and System, Vol. PAS-102, No.9, Sep. 1983,
p g . 2959 -2970.
1131 IEEE Committee Roport, 'Bibliography
[141 U r m , R."Computer control in a Combined Cycle Power Plant"
Proc.of the IEEE Computer Society's First International
Computer Softwaro and Applications Conference, Chicago, IL.,
8-11 N W . 1977, pp. 608-614.
1151 Uram, R.*CoiPputer Control in a Combined Cycle Power Plant"
Proc.of the 20 th ISA Power Instrumentation Sympoeium, New
Orleans, La, May 22-25, 19'77,.
in a Combined Cycle Power Plant
Part I: the process and the computer". IEEE-Winter Xeeting,
New York, N.Y.,
Enero 30- Febrero 4 , 1977, pp. 1-6.
[16] Uram, R. "Computer Control
[17] Uram, R. "Computer Control in a Combined Cycle Power Plant
Part 11: the Digital Gas Turbine System" , IEEE Pes Winter
Meeting, New York,N.Y., Enero 30- Febtero 4 1977, pp. 1-8.
[U]Uram, R. "Computer Control in a Combined Cycle Power Plant
Part 111: The Digital Steam Turbine Syeten' , IEEE PES Winter
Meeting, New York, N.Y.,Enero 30 -Febrero 4, 1977, pp. 1-11.
53
Programacibn del modelo y diseAo slctrbnico:
[19] Tom Swan,"Mastering TURBO PASCAL 5.5 '.Hayden
Books,1989.
[20J William H., Cambridge University. "Numerical Recipes in c,
The Art Of Scientific computing". International Press.1980.
I
1211 Lewis C. Eggebretch ."Interfacing To The IBn Personal Computer. S?LMS Books. 1983.
1221 Chirlian. "Electronic circuits, Phy8iCal Principles, Analysis
and Design". Mc.Graw Hill. 1978.
[23] Schilling, Belove.wElectronic Circuits, Discrete and
Integrated", Mc.Graw Hill. 1980.
Diseño y minimizacibn de las normas $ y y :
[ 2 4 ] J.C. Doyle ,K. Glover,P.P.
Khargonekar,B.A. Francis.*State
Space Solutions To Standard H and .
H Control Probleme".IEEE
Transactions on Automatic Control. Vol 8 , p. 831-847.1989.
[25] M. Vidyasagar. "Control Systems Synthesis : A Factorization
Approach", M.I.T. Press.
."
[26] K. Poolla
Frequency Domain Techniques For Control
Systems".Notas. 1987.
[27] Zames
On The 1/0 Stability of NLTV Feedback Syetems" ,Parts
I y 11. IEEE Transactions on Automatic ControllApril 1966.
Consulta general:
[28] B.C. Kuo."Automatic Control Systeme",Ptentice Hall.
(291.R. Lawrence Rabineer,Charles M. Rader."Digital Signal PrOCessing".IEEE Press.
[30] K. ogata
(311 K. Ogata
.m
Ingeniería De Control Moderna".Prantice Hall.
."Discrete-Time Control Systems*.Prentice Hall.
54
,
ANEXO
A . l XANUAL
.
PARA USO DEL PROGRAWA
Para poder ejecutar 01 programa ea necesario contar con el
siguiente equipo:
I
1 : computadora personal comatibie con IBW-PC/AT con 6 4 0
kilobytes de memoria.
2 : tarjeta gráfica(~cuLgs,aa,va O EGA).
Al inicio mismo del programa aparece en pantalla una pregunta:"que
archivo": esta pregunta se refiere al archivo donde se encuentran
las matrices Acon, Bcon, ccon, Dcon que definen en la
representación de espacio de estado, al controlador obtenido por
el método de factorización racional. Los nombres de archivos
válidos para los 3 puntos en l o s que se linealizó el sistema, son:
CONl(diseñado en el punto da operacien del 50 8 de carga de la
turbina), CON2 (75 %) y CON3 ( 100 O).
En general se puede discretizar cualquier controlador y ponerlo de
la forma dada por la función en lenguaje HATLAB n14LAB2PAs* (se
muestra un listado de esta función en el apéndice A . 4 ) ;
posteriormente es necesario convertir el fonuato de variable
MATLAB, a un archivo de ASCII por medio del programa TRANSLAT. Esto
es necesario para poder leer el controlador con el programa del
modelo de la turbina. Una vez dado el nombre del archivo el
programa empieza a desplegar gráficas de los flujos en las
diferentes etapas de presidn de la turbina, y de la apertura de las
válvulas gobernadoras, el valor de apertura de válvulas inicial es
ocho y permanece constante significa apertura total. Es necesario
dejar que el valor dado por "con2" llegue a 20, con el fin de que
las variables que no son inicializadas tomen un valor estable
"real", antes de proceder a la entrada de cambios en los par6metros
del. modelo. (en las paginas siguientes se puede encontrar que
significa cada variable desplegada en pantalla).
A. 1.1 CONTROL DEL PROCRAMA
El programa cuenta con varias teclas que efectdan una función
especial. Al oprimir la tecla "h" se muestra una ventana con la
descripción de la función de las teclao. El formato que aparece
junto con una explicación mas detallada de las funciones de tecla,
es el siguiente :
a: MANTIENE EL VALOR DE APERTURA ACTUAL DE LAS VALVULAS
GOBERNADORAS
p: ABRE LAS VALWLAS GOBERNADORAS A LA MAXIMA VEfL>cIDAD
PEWITIDA POR EL SERVOMOTOR POSICIONADOR.
n: CIERRA LAS V A L W L A S GOBERNAWRAC A LA WdíIIu VELOCIDAD PERMITIDA POR EL SERVOMOTOR.
. .
55
..
'
c: ACCIONA LA RUTINA DE CONTROL ELEC"R+HIDRAULICO ,ES
DECIR CIERRA EL LAZO CON UN CONTROLMOR PI.
U: CIERRA EL LAZO CON EL CONTROLMOR Hc.
e: TERMINA LA SIWJLACION Y PREGUNTA SI SE DESEA GRABAR
EL ARCHIVO PARA LA LINEALIZACION DEL MODELO POR
MEDIO DEL PAQUETE üATL&B.
9: GRAFICAS EXTRAS DE LA SIHULACION ,VEiDCIDAD,POTENCIA
FIUJOS-AL APARECER CADA GRAFICA E8 NECESARIO PüLSAR
<ENTER> PARA QUE APAREZCA LA PROXIWA G W I C A Y CONTINUAR LA SIHULACION.
k: CAMBIOS EN LA REFERENCIA DE VELWIDAD ,POTENCIA DEMANDADA,SREACION DE ARCHIVOS DE VARiABLB8 BINARIOS
PARA SU PROCESO EN OTRO PAQUETE CONO üATLAB,INICIO
DEL CONTADOR DE ARCüIV0.U DAR CADA VALOR ES NECESARIO TERMINAR CON UN ESPACIO.
A. 1.2 VARIABLES DESPLEGADAS FOR EL -RAMA
Lista de las variables desplegadas en la pantalla por el programa,
con sus unidades :
tiempo
: Tiempo tranacurrido en la simulación, segundos.
potencia : Potencia generada por el complejo de la turbina,
sin restar las pérdidas mecánicas, Btu/seg.
Fgv
: Flujo a través de las válvulas gobernadoras, es
el flujo de la turbina de alta presión, Lbm/eeg..
: Flujo en la entrada de la turbina de presión
Fipi
intermedia, Lbm/seg..
: Flujo en la entrada de la turbina de baja presi6n,
Plpi
Lbm/seg
Atotal
: Area normalizada de apertura de las válvulas
gobernadoras, adimensional (unidad de área)/
(área total de apertura de una válvula).
: Potencia mecánica generada por la turbina de baja
Mwlp
presión, Btu/seg..
: Potencia mecánica generada por la turbina de presión
Mw ip
intermedia, Btu/seg..
: Potencia mecdnica generada por la turbina de alta preUwhp
siOn, Btu/seg..
: Salida del controlador electro-hidráulico, acci6n de
w
- on
control, adimensional.
: Seaal de error de entrada a los controladores, adierror
mensional.
velocidad: Velocidad del rotor de la turbina, Rad/seg.
: Valor del contador de archivo ,ente valor varia entre
con2
O y 150, indica el nilmero de valoren almacenados para
cada variable, en el archivo oreado al final del programa,
Mdem
: Potencia demandada a la turbina por el generador eléctrice, Btu/seg..
SpeedRef : Valor de la velocidad de referencia, Rad/seg..
: Indica que comando se está realizando, ver apartado
Tecla
..
56
I
Salida
.
antorior
: Salida del controlador diaeiiado por 01 M t d o do factorieaci6n racional.
57
A - 2 -AL
DE USO DE iA TARJBTA aB
ENTRADA
SUM
AWA~M;I-
Para el control de la tarjeta de entrada-salida, go n-gita
un
Prqrd. computadora que o.criba a las direccionu .d 10s
puertos do control de la tarjeta. A continuacidn se niestra un
seudo-c6digo para dar salida a una s a l aMl@ia
y para la
adquisici6n de otra sena1 de este tipo. Estas mehies son
transmitidas y recibidas por los cables que salen de la tarjeta
etiquetados ENT y SAL. Las instrucciones PoRT[dirección]=x y
-PoRT[dirección] son equivalentes a escribir y leer la palabra de
ocho bits x. Cabe mencionar quo solo .e usan direcciones de puerto
de entrada salida de la computadora IBU-FC/AT compatible para este
propbsito. Les direcciones de control para la conversión AJD y D/A
son en hexadecimal 300 y 302. Es muy importante seguir la secuencia
de los seudo-c&iigos de lo contrario no sa aseguran los efectos
esperados.
Para un ejemplo vea el listado de PTO2.PAS.
El procedimiento leequerto, lee una palabra a3, de 12 b i t s que
equivale a una conversi611 analógica digital del volatje presente
en ENT.
leeguerto(a3: palabra
inicio
al = PORT[hexadecimal
retardo
bl = PORT[hexadecimal
b2 = PORT[hexadecimai
a3 = 256.332 + bl
fin
de 12 bits)
3021
3001
3001
~1 procedimiento ponquerto, actualiza e1 valor de voltaje Presente
en SAL, con el equivalente de 12 bits a31 O hexadeCi-1 equivale
a cero volts y FFF hexadecimal equivale a 4 volts.
ponquerto(a3 : palabra de 12 bit.)
inicio
al = parte-entera(a3/16)
a2 = residuo(a3/16)
al
16.residuo(al/l6) + parte ent=a(al/W
Inicio de la actualizaci6n 1
mm[hexadecfml 3001 = a 1
{
actualiza S u con a3 )
PORT[hexadecimal 3021
a2
fin
-
-
58
A.2.1
ESPECIPICACIONEB TEQlIcAs
La tarjota diseñada cumple con las siguiontes especificacionos :
Resolución en la conversión A / D
Resolución en la conversión D/A
.. 12porbits
bit).
.. 12 bit..
(2.9 iilivolta por
Frecuencia máxima de iniestra
.. O a 4 volts.
.. a 4 volts.
.. 9 Kiloherts.
Corriente de salida
..
Voltaje de entrada analógico
Voltaje de salida anaiógico
Corriente de entrada
0
.. 5 iiliamperee.
5
miliamperes.
59
CON.
DE PARTES
IC1.
.,IC2',IC3
'IC4.
IC5'
'IC6,,I C 1
IC8
IC9"'
IClO.
IC11
IC12,
,IC13:
IC14':.
IC15,
c1,.c2. C8
c9, C l O
R1
R2
R3 '
R4 ,R5,R6
,
'
'
"
'
..
I
: 7435245
I 7435244
I 74iS90
I ADC 1205
I 743504
I 743530
I 14i508
I 14L8139
I
74i53a
I DAC 1 2 3 0
I LF 398
I 7435123
t LF 357
1 0 . 1 miorofaradio8
1 100 daofaradioe
i
I
I
510
Kn
potenci¿metro'lO Kn
potenaiómetro
100
M
8
I
7
I
6
I
5
I
4
I
I
3
I
2
I
I
_ -
I
BUS DE DATOS
A
A.3
PROGRAW ptoa;
EJEHPU DE PROGRAMA DE CONTROL
--
use8 crt,doi,graph:
type veo
name
var
array(i..210] of integer
stringtOO] ;
counter
.
PIl-, wl ,A0 ;Pi0
i ,j
I
k
KO .Kd .Ki .tl
I
Tao
EO ,E1 ,LO ,L1 1
YC ,Ref
,F
Sal , Ent
,Refe
video , modo ,mod1
tecla
I
: integer :
,W ,Ti,
: real:
Ocvl
vec-int
: integer:
: vec :
: integer ;
: char ;
: byte :
: pointer:
Const intno =$OB; ( i n t e m p d o n IRQ3)
procedure auxi;
begin
TextBackground (blue):
clrscr;
gotolty(2,5):
Write(' k p :',Kp:4:4,'
Td :',Td:4:4,'
Ti: * ,Ti: 4:4) ;
gotoxy(2,7) ;write( valor de KP I);readln(Kp) :
gotoxy(2,8);write(' Valor de Ti '):readln(Ti)t
gotolty(2,9);write(' valor de Td ');readln(Td):
gOtOlty(2,11);write(' TODO BIEN y/n '):
tecla :- readkey:
end ;
procedure ConstInit ;
var
aux : real ;
begin
Tex-tBackground (black);
clrsor;
Ti := 0.55 : Td := O ; Kp := 0.5;
auxi ;
Window ( 8 I 8,66 I 18);
writeln;
Ref :- 2000 ;
F := 500 ;
Tao := 1/F 8
62
’
”
:- 2O*Td*Rp/(Tao*(iO + w ) ) !
tl :- (lO-Td*Kp)/ (10 + rn*I(L>) ;
ki :- I(p*TaO/(2*Ti):
Ll :- o:
El := 01
Pi1 :- 01
w1 :- 01
EO := 01
yc :- o;
i:-r;
vindow(1,l ,80,25) :
TextBackground (black)I
goto~(l,21)ivrite(@ m i s e lmn para ir ai ienii 8 ) ;
gotoW(l,22) :
mite(
Lectura
Sal. Cont
Referencia
end t
@:
)
procedure leeport;
var
j: integer;
a,b,c :byte;
begin
EO :- El:
c := port[$0302]:
for j := 1 to 400 do :
a :- port($0300];
for j :- 1 to 100 do :
b := port[$300];
L1 := trunc(a*256+b);
Ent[i] := L1 i
Refo[i] :- Ref ;
El :- Ref
L1 ;
(if abs(E1) < 6 then El :- O 1 )
end t
-
procedure ponport(a3:integer)i
var
al,a2 :byte;
j : integer;
begin
Sal[i] := a3 :
if i >149 then i := 150 :
al :- trunc(a3/16):
a2 := (a3 mod 16):
al := l6*(al m o d 16) + trunc(al/l6):
port[$o300]:-alt
for j :- 1 to 100 do:
port[$0302]:=a2:
end :
63
procedure control ;
begin
Pi0 :- Pil;
wo :- W 1 ;
Pi1 :- ki*(EO) + Pi0 ;
if pi1 > 4095 then pi1 :- 3000;
W1 :- kd*(El
EO)
tl*WO ;
if pdl > 4095 then pdl :- 1000 ;
yc :- trUnC(kp*El +Pil+Wl );
if yc >4095 then yc :- 4095;
if yc < o then yc :- o ;
pOnp0z-t (YC):
-
-
end;
procedure mi-int;
INTERRUPT;
var k)r : integer;
besin
leeport;
control;
counter := counter + 1;
if (counter mod 2 0 )
O then i := i + 1;
if counter >= 1000 then counter := O;
tecla := IqC ;
port[$20] :- $20;
end ;
-
procedure Int-init;
begin
pOrt[$20] :- $83 ;
ocwl :- pOrt[$zl];
ocwl :- ocwl and $P7 ;
pOrt[$21] :- ocwl ;
htintVec(intno,vec-int);
SetintVec(intno,@mi-int);
end ;
I
($1 c:\tp5\chava\grafi.pas)
procedure grafica;
begin
m o d 1 := LantMode ;
DetectGraph(video,modo);
InitGraph (video,modo,I c :\tp I ) ;
graf(Sal,Ent,Refe,20,10,600,350,i-1,g Entrada ,Salida
closegraph;
textmode(mod1) ;
I);
64
end ;
procedure
menu:
begin
clrscr;
Windoy(8,8,66,18);
Textñackground (blue);
clrscr;
gotoxy(2,2); write(* g : Grafica'):
gotOxy(2,3) :write( ' r : Cambio de Referencia 1 ) :
gOtOXy(2,4):writa(' e : Inicio de Contador Ds Grafícal):
gotoXy(2,5);write(' k : Cambio de parametroe PID I ) ;
gotoxy(2,6):write(* 8 : Salir del PragraM l):
tecla := readkey ;
case tecla of
lg' : grafica ;
Iri : begin
repeat
clrscr ;
gotoxy (2,4) ;write ( 'Valor de Ref ; ,Ref: 4) ;
gotoxy(2,5);write('Valor Nuevo :');readln(Ref);
goto~y(2,7);write(~Todobien y/n I ) ;
i :- 1;
tecla := readkey ;
until tecla = ' y ' ;
end :
'e' : i : - 1 :
1s' : exit;
lk' : begin
repeat
auxi :
until tecla='y';
i:-1:
end;
end :(del case )
window ( 1,1 ,80 ,25) ;
TextBackground (black);
clrecr;
tecla := lq' :
goto~y(l,21);write(~m i s e "m" para ir al menil I ) :
gotoxy(1,22) :
write(' Lectura
6al.cont
Referencia
contador' ) ;
end ;
Drocedure actualiza;
-begin
gotoxy(l,23);write(' ':75);
gOtOq(1,23) ;
write ( '
,L1*5/4095:3:4,'
*,yc*5/4095:3:4);
write( I
lfR%ff5/4095:3:4,1
1,i:3);
'end;
65.
( m
OCRAM
PRINCIPAL
)
begin
ConetInit ;
k:-O;
counter := 1;
In-init ;
tecla :- ' q ' t
repeat
if keypressed then tecla :- readkey ;
if tecla
'1' then menu ;
if (counter mod 10) = O then actualiza:
until tecla
1s';
SetIntVec(intno,vcic-int);
ponport(1400) ;
end.
--
66
A.3.1
EJEMPID DE FWCION EN LENGUlWE llATLJIB
Funci6n en lenguaja !&&TU, auxiliar para lear un controlador en
espacio de eetado con el programa del modelo no lineal de la
turbina.
function p
-
malbZpas(a,b,c,d);
% FüNCiON QüE PASA DEL PORUATO I(ATL&B AL FORXATO DE LECTURA PARA
I UiC PROüRAMAS EN PASCAL DEL MODELO NO LINEAL DE LA TURBINA.
z
P
ilabZpaS(a,b,C,d)
k=size(a) ;
a m 0;
for i=l:k(l,l)
aux
[aw ;
a(i,:) ' I :
end ;
kl = size(aux) ;
aux = aw(2:ki(l,l),:);
p
[k(l,l) aux' b' c d];
-
-
67