Operadores de Implicación y Métodos de Defuzzificación
Anuncio

UNIVERSIDAD DE GRANADA
E.T.S. DE INGENIERIA INFORMATICA
Departamento de Ciencias de la Computación
e Inteligencia Artificial
INTEGRACION DE OPERADORES DE IMPLICACION
Y METODOS DE DEFUZZIFICACION EN SISTEMAS
BASADOS EN REGLAS DIFUSAS.
IMPLEMENTACION, ANALISIS Y
CARACTERIZACION
TESIS DOCTORAL
Antonio Peregrín Rubio
Granada, Mayo de 2000
INTEGRACION DE OPERADORES DE IMPLICACION Y
METODOS DE DEFUZZIFICACION EN SISTEMAS
BASADOS EN REGLAS DIFUSAS. IMPLEMENTACION,
ANALISIS Y CARACTERIZACION
ANTONIO PEREGRIN RUBIO
INTEGRACION DE OPERADORES DE
IMPLICACION Y METODOS DE
DEFUZZIFICACION EN SISTEMAS
BASADOS EN REGLAS DIFUSAS.
IMPLEMENTACION, ANALISIS Y
CARACTERIZACION
MEMORIA QUE PRESENTA
ANTONIO PEREGRIN RUBIO
PARA OPTAR AL GRADO DE DOCTOR EN INFORMATICA
MAYO 2000
DIRECTOR
FRANCISCO HERRERA TRIGUERO
DEPARTAMENTO DE CIENCIAS DE LA COMPUTACIÓN
E INTELIGENCIA ARTIFICIAL
E.T.S. de INGENIERIA INFORMATICA
UNIVERSIDAD DE GRANADA
La
memoria
titulada
Integración
de
Operadores
de
Implicación y Métodos de Defuzzificación en Sistemas Basados
en
Reglas
Difusas.
Implementación,
Análisis
y
Caracterización, que presenta D. Antonio Peregrín Rubio para optar
al grado de Doctor, ha sido realizada en el Departamento de Ciencias
de la Computación e Inteligencia Artificial de la Universidad de
Granada bajo la dirección del Doctor D. Francisco Herrera Triguero.
Granada, Mayo de 2000
El Doctorando
El Director
Fdo. A. Peregrín
F. Herrera
AGRADECIMIENTOS
Quisiera agradecer en primer lugar su siempre incondicional apoyo
a mis padres, y a mi novia Ana su compresión durante todo el tiempo
que ha llevado realizar esta tesis.
Doy las gracias a mi director, Francisco Herrera, por haberme
conducido siempre sabiamente por el camino adecuado, y también por
su paciencia, ánimo y las infinitas horas que le ha llevado que hoy esta
memoria sea ya una realidad.
He de agradecer también a Oscar Cordón su trabajo, disponibilidad
y brillantes ideas que han contribuido en multitud de ocasiones a
llevar a buen puerto esta obra.
Finalmente también dar las gracias al Instituto Andaluz de
Geofísica y Prevención de Desastres Sísmicos por las facilidades que
me ofrecieron para que pudiese realizar mi doctorado durante los dos
años que trabajé con ellos. Igualmente agradezco a José Manuel
Andújar las facilidades que me ha dado durante los últimos años para
terminar esta tesis, y a mi amigo Benito Martín por prestarme
siempre su material informático para todo lo que lo he necesitado.
Y por si me olvido de alguien:
Gracias a Todos
Índice
Introducción
7
1 Introducción a los Sistemas Basados en Reglas Difusas
11
1.1 Tipos de Sistemas Basados en Reglas Difusas
12
1.1.1 Sistemas Basados en Reglas Difusas de tipo Mamdani
12
1.1.2 Sistemas Basados en Reglas Difusas de tipo Takagi-Sugeno-
13
Kang
1.2 Funcionamiento y Compoentes de los SBRDs de tipo Mamdani
15
1.2.1 La Base de Conocimiento
15
1.2.2 El Interfaz de Fuzzificación
16
1.2.3 El Sistema de Inferencia
17
1.2.3.1 Operadores de Conjunción
18
1.2.3.2 Operadores de Implicación
20
1.2.4 El Interfaz de Defuzzificación
25
1.2.4.1 Defuzzificación en Modo A – FATI
26
1.2.4.2 Defuzzificación en Modo B – FITA
28
1.3 Diseño de Sistemas Basados en Reglas Difusas
31
1.3.1 Diseño del Sistema de Inferencia
31
1.3.2 Obtención de la Base de Conocimiento
33
Índice
2
1.3.2.1 Tareas de Diseño para obtener la Base de Conocimiento
33
2 Implementación de Sistemas Basados en Reglas Difusas para
35
Modelado y Control Difuso
2.1 Marco para la Implementación de SBRDs
35
2.1.1 Alternativas para el Diseño de SBRDs
36
2.1.2 Métodos de Implementación
37
2.1.3 Tipos de SBRDs para Modelado y Control Difuso
38
2.2 Implementaciones Software de SBRDs: Estructuras de Datos
39
2.2.1 Estructuras de Datos para la Base de Conocimiento
39
2.2.2 Estructuras de Datos para el Sistema de Inferencia
43
2.3 Implementaciones Software de SBRDs: Algoritmos
44
2.3.1 Interfaz de Fuzzificación
44
2.3.2 Sistema de Inferencia
45
2.3.3 Interfaz de Defuzzificación
49
2.4 Estudio Comparativo del Método Exacto y Aproximado
55
2.5 Conclusiones
58
Apéndice A: Resultados Parciales
60
3 Análisis de la Integración de Operadores de Conjunción, Operadores
63
de Implicación y Métodos de Defuzzificación
3.1 Estudios Previos en el uso de Operadores de Conjunción e Implicación,
64
y Métodos de Defuzzificación en el diseño de SBRDs
3.2 Selección de Operadores de Conjunción, Operadores de Implicación y
65
Métodos de Defuzzificación
3.2.1 Operadores para el Sistema de Inferencia
65
3.2.2 Métodos de Defuzzificación
66
3.3 Metodología de la Comparación
68
3.4 Resultados Obtenidos
70
Índice
3
3.5 Análisis de Resultados
73
3.6 Conclusiones
75
Apéndice A: Operadores de Conjunción
77
Apéndice B: Resultados Parciales
78
4 Análisis de la Robustez de los Operadores de Implicación:
93
Propiedades Básicas y Caracterización en Base a Propiedades Básicas
y a Métodos de Defuzzificación
4.1 Estudio de las propiedades Básicas para la Robustez
94
4.1.1 Por qué son necesarias unas Propiedades Básicas
94
4.1.2 Operadores Force-implication
95
4.1.2.1 Operadores force-implicaiton basados en operadores de
95
indistinguibilidad
4.1.2.2 Operadores force-implication basados en distancias
4.1.3 Estudio Experimental
4.1.3.1 Selección de Operadores de Conjunción e Implicación y
99
100
100
Métodos de Defuzzificación
4.1.3.2 Resultados Obtenidos y Análisis
4.1.4 Obtención de las Propiedades Básicas
4.2 Caracterización de los Operadores de Implicación en base a las
101
105
109
Propiedades Básicas y a los Métodos de Defuzzificación
4.2.1 Por qué una Caracterización de los Operadores de Implicación
110
en base a las Propiedades Básicas y a los Métodos de
Defuzzificación
4.2.2 Influencia de las Propiedades Básicas
111
4.2.3 Relación entre las Propiedades Básicas y los Métodos de
112
Defuzzificación
4.2.3.1 Análisis de las Clases de Operadores de Implicación
113
4.2.3.2 Consecuencias del Análisis de las Clases de Operadores 119
de Implicación
Índice
4
4.2.4 Caracterización de los Operadores de Implicación
4.2.4.1 Métodos de defuzzificación adecuados para los
120
120
operadores de implicación t-norma
4.2.4.2 Métodos de defuzzificación adecuados para los
121
operadores force-implication
4.2.4.3 Métodos de defuzzificación adecuados para las funciones 125
de implicación
4.2.4.4 Métodos de defuzzificación adecuados para otros
127
operadores de implicación
4.3 Conclusiones
129
Apéndice A: Resultados Parciales
133
5 Estudio de los Métodos de Defuzzificación
137
5.1 Clasificación de los Métodos de Defuzzificación
138
5.2 Métodos de Defuzzificación No Paramétricos
139
5.2.1 Métodos de Defuzzificación No Paramétricos del
139
Modo A – FATI
5.2.2 Métodos de Defuzzificación No Paramétricos del
141
Modo B – FITA
5.3 Métodos de Defuzzificación Paramétricos
144
5.3.1 Métodos de Defuzzificación Paramétricos del Modo A – FATI
145
5.3.2 Métodos de Defuzzificación Paramétricos del Modo B – FITA
148
5.3.3 Métodos de Defuzzificación Paramétricos Mixtos
149
5.4 Estudio Experimental
149
5.4.1 Selección de los Operadores de Conjunción e Implicación
149
5.4.2 Aplicaciones Seleccionadas
151
5.4.3 Análisis de Resultados y Conclusiones
151
5.5 Una Nueva Propuesta de Métodos de Defuzzificación Paramétricos
156
5.5.1 Presentación de la Nueva Propuesta
156
5.5.2 Métodos Evolutivos de Aprendizaje de Parámetros
159
Índice
5
5.5.3 Resultados del Ajuste de Parámetros en la Nueva Propuesta
161
5.5.4 Análisis de Resultados
164
5.6 Conclusiones
166
Apéndice A: Resultados Parciales
168
Apéndice B: Estrategias de Evolución y Algoritmos Genéticos
174
Comentarios Finales
179
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
183
Apéndice II: Aplicaciones
207
Apéndice III: Algoritmo de Aprendizaje de Bases de Reglas de Wang y 215
Mendel
Bibliografía
217
6
Índice
Introducción
Planteamiento
En la actualidad, una de las áreas de aplicación más importantes de la Teoría de
Conjuntos Difusos y de la Lógica Difusa, enunciadas por Zadeh en 1965 [Zad65], la
componen los Sistemas Basados en Reglas Difusas (SBRDs). Este tipo de sistemas
constituyen una extensión de los Sistemas Basados en Reglas fundamentados en
Lógica Clásica puesto que emplean reglas de tipo “Si-entonces” en las que los
antecedentes y consecuentes están compuestos por proposiciones difusas en lugar
de proposiciones de la Lógica Clásica.
El comportamiento de un SBRD depende fundamentalmente de dos factores:
•
El Sistema de Inferencia, encargado de realizar el proceso de razonamiento
difuso.
•
La Base de Conocimiento, que contiene la información referente al problema
que se pretende resolver en forma de reglas lingüísticas.
Por tanto, el diseño de un SBRD implica la determinación de la estructura de los
componentes anteriores. En esta memoria nos centramos en el primero de ellos, el
diseño del Sistema de Inferencia.
El proceso de inferencia está basado en la aplicación del Modus Ponens
Generalizado, extensión del Modus Ponens de la Lógica Clásica propuesto por
Zadeh. Desde un punto de vista operativo, su aplicación precisa en el caso más
general, que el SBRD disponga de dos operadores: conjunción e implicación.
Asimismo, el SBRD emplea unas técnicas o métodos de defuzzificación para
transformar la salida del proceso de inferencia en una salida real.
El diseño del Sistema de Inferencia comprende la tarea de elección de los
operadores de conjunción, implicación y del método de defuzzificación. La literatura
especializada dispone de una amplia variedad de posibilidades para cada uno de
Introducción
8
ellos de modo que es posible construir un amplísimo grupo de SBRDs basándose en
la combinación de estos operadores y métodos. Diversos trabajos se ocupan del
estudio de los operadores de implicación ya que constituye una de las principales
cuestiones que preocupan a los autores en el diseño de los SBRDs. Estos operadores
han sido estudiados y clasificados en familias atendiendo a sus propiedades
matemáticas, existiendo debate entre los partidarios de unas y otras familias.
En cuanto a los métodos de defuzzificación, las nuevas propuestas son
numerosas y aparecen continuamente, debido principalmente a dos razones: a la
gran importancia de este proceso en el comportamiento del SBRD, y al hecho de
que no exista unanimidad en cuanto a cuáles son las pautas correctas que deben
seguir estos métodos. En este sentido, en unos casos se utiliza la geometría del
conjunto difuso (área, altura, etc,), mientras que en otros se procede a calcular
alguna medida estadística, realizar transformaciones, etc. Más recientemente se
tiende a parametrizar las expresiones para adaptar el método en unos casos al
problema y en otros para decidir la propia pauta de comportamiento que se desea
obtener del método. Existen incluso dos tendencias operativas bien diferenciadas
en cuanto a cómo se debe actuar: si se deben obtener valores numéricos
directamente como resultado de la inferencia de cada regla o por el contrario si se
deben combinar todas las aportaciones difusas provenientes de inferir con cada
regla y realizar sólo una conversión del resultado final en un número real.
Objetivo
El objetivo de este trabajo consiste en realizar un estudio detallado de las
alternativas para diseñar el Sistema de Inferencia de SBRDs con objeto de conocer
las mejores combinaciones de operadores y métodos de defuzzificación. Además, se
pretende que el estudio realizado permita extraer conclusiones generales que
ayuden al diseño de este componente en el futuro.
Dicho objetivo global se descompone en los siguientes objetivos particulares:
1. Estudiar la influencia de las filosofías de implementación de SBRDs en el
rendimiento de estos, sobre todo en cuanto a la precisión del sistema.
2. Analizar el alcance de la elección de las distintas componentes del Sistema
de Inferencia --operadores de conjunción e implicación, y método de
defuzzificación-- para determinar cuales de los propuestos en la literatura
son los mas adecuados.
3. Obtener un perfil que caracterice a los operadores de implicación con buen
comportamiento independientemente del método de defuzzificación con el
Introducción
9
que se combinen y de la aplicación en que se empleen. Este perfil vendrá
representado por una serie de propiedades básicas cuya verificación
garantice buenos resultados y que pueda generalizarse a otros operadores
no incluidos en el estudio realizado.
4. Analizar qué características de los métodos de defuzzificación les hacen
adecuados para ser empleados en combinación con los operadores de
implicación en función de las propiedades verificadas por estos.
5. Determinar un perfil de métodos de defuzzificación que permitan diseñar
SBRDs con buen comportamiento en combinación con el mayor numero de
operadores de implicación posible. Proponer una familia de métodos de
defuzzificación adaptativos que cumplan dicho perfil.
Resumen
La organización de la presente memoria consiste en cinco capítulos, una sección
de Comentarios Finales y tres Apéndices. A continuación se resume cada una de
estas partes.
En el Capítulo 1 se introducen los SBRDs para modelado y control difuso
revisando las tareas de diseño de los mismos. Asimismo, se analiza el
funcionamiento de los distintos componentes de los SBRDs y se presentan las
diferentes alternativas de diseño que se han empleado habitualmente, organizadas
según familias.
En el Capítulo 2 se estudian las técnicas para la implementación software de
SBRDs para modelado y control difuso. Se analizan las diferentes alternativas
prestando un especial interés al aspecto de la precisión de las mismas.
En el Capítulo 3 se lleva a cabo un primer estudio práctico comparativo de las
alternativas clásicas para el diseño de SBRDs. Para ello se presenta una
metodología que mide el comportamiento de los SBRDs aplicados a diferentes
problemas de modelado difuso. Este estudio inicial proporciona un conjunto de
primeros resultados y plantea, a su vez, las principales cuestiones que se
desarrollan posteriormente en los dos capítulos siguientes.
En el Capítulo 4 se aborda el estudio de los operadores de implicación con objeto
de encontrar propiedades que permitan decidir sobre sus cualidades en los SBRDs
así como su compatibilidad con los métodos de defuzzificación. Se obtiene un grupo
de tres propiedades básicas para los operadores de implicación y se determina el
perfil de los métodos de defuzzificación necesarios para obtener buenos resultados
10
Introducción
en combinación con los operadores de implicación según las propiedades básicas
que verifiquen.
En el Capítulo 5 se realiza un estudio de los métodos de defuzzificación
propuestos en la literatura. Aunando dicho estudio y el perfil más general para
obtener métodos de defuzzificación con garantías de buen comportamiento obtenido
en el Capítulo 4, se propone un nuevo grupo de métodos de defuzzificación
paramétricos junto con los métodos de aprendizaje de sus parámetros mediante
Algoritmos Evolutivos.
En el apartado de Comentarios Finales se resumen los resultados más
relevantes obtenidos en esta memoria y se plantean las líneas futuras de
continuación de este trabajo.
En el Apéndice I se exponen los 37 operadores de implicación y los 51 métodos
de defuzzificación utilizados en las experimentaciones realizadas. Entre los
operadores de implicación se encuentran 6 funciones de implicación y 6 t-normas
entre otros.
El Apéndice II se ha dedicado a describir las cinco aplicaciones de modelado
difuso que se emplean en los distintos capítulos de la memoria: la relación
funcional simple Y=X, el modelado difuso de dos superficies tridimensionales y dos
problemas de distribución en el sistema eléctrico español.
Finalmente, el Apéndice III describe el algoritmo de Aprendizaje de Wang y
Mendel para la obtención de Bases de Conocimiento a partir de ejemplos, con el
cual se han obtenido las utilizadas en la presente memoria.
Capítulo 1
Introducción a los Sistemas Basados
en Reglas Difusas
En la actualidad, una de las áreas de aplicación más importantes de la Teoría
de Conjuntos Difusos y de la Lógica Difusa, enunciadas por Zadeh en 1965 [Zad65],
la componen los Sistemas Basados en Reglas Difusas (SBRDs). Este tipo de
sistemas constituyen una extensión de los Sistemas Basados en Reglas que hacen
uso de la Lógica Clásica puesto que emplean reglas de tipo “Si-entonces” en las que
los antecedentes y consecuentes están compuestos por proposiciones difusas en
lugar de proposiciones de la Lógica Clásica.
En un sentido muy general, un SBRD es un Sistema Basado en Reglas en el que
la Lógica Difusa puede ser empleada tanto como herramienta para representar
distintas formas de conocimiento sobre el problema a resolver, como para modelar
las interacciones y relaciones existentes entre las variables del mismo. Las
principales aplicaciones de estos sistemas inteligentes son el modelado difuso de
sistemas [BD95, Ped96, SY93] y el control difuso [DHR93, Hir93, Wan94].
El modelado difuso de sistemas puede ser considerado como una aproximación
para modelar un sistema haciendo uso de un lenguaje de descripción basado en
Lógica Difusa con predicados difusos [SY93]. El control difuso por su parte consiste
en un enfoque para el control de procesos en el que la estrategia de control aplicada
está basada en la experiencia del operador humano representada en forma de
reglas lingüísticas de control [DHR93].
Es común el nombre de Controladores Difusos para nombrar a los SBRDs tanto
para modelado como para control. A lo largo de esta memoria se utilizará en
ocasiones esa denominación genérica para referirnos a los SBRDs,
independientemente de la aplicación a la que estén dedicados.
12
Introducción a los Sistemas Basados en Reglas Difusas
En este Capítulo vamos a introducir las nociones básicas de los SBRDs para
modelado y control, su composición y funcionamiento, y las tareas de diseño que es
necesario llevar a cabo para obtenerlos. No se entrará a presentar los principios
básicos de la Lógica Difusa que pueden ser consultados en [KY95, Zim96].
1.1 Tipos de Sistemas Basados en Reglas Difusas
En la literatura especializada, se suele distinguir entre dos tipos de SBRDs para
modelado y control difuso, según la forma que presentan las reglas difusas que
emplean. En las subsecciones siguiente describiremos ambos tipos [Wan94].
1.1.1 Sistemas Basados en Reglas Difusas de tipo Mamdani
El primer tipo de SBRD que trabajó con entradas y salidas reales fue propuesto
por Mamdani [Mam74], el cual fue capaz de plasmar las ideas preliminares de
Zadeh [Zad73] en el primer SBRD tangible para una aplicación de control. Este tipo
de Sistemas Difusos, los más utilizados desde aquella fecha, se conocen también
por el nombre de SBRDs con Fuzzificador y Defuzzificador o, como ya se ha
comentado, por el de Controladores Difusos, nombre que ya acuñó Mamdani en sus
primeros trabajos [MA75] puesto que su aplicación principal ha sido históricamente
en control de sistemas.
Las reglas son del tipo ''Si - entonces'' y en el caso en que el SBRD tipo
Mamdani tenga múltiples entradas y una única salida, presentan la siguiente
estructura:
Si X1 es A1 y ... y Xn es An entonces Y es B,
donde Xi e Y son variables lingüísticas de entrada y salida respectivamente, y los Ai
y B son etiquetas lingüísticas asociadas a dichas variables.
Los SBRDs emplean un Sistema de Inferencia que efectúa el Razonamiento
Difuso teniendo en cuenta la información contenida en una Base de Conocimiento.
Los componentes que dotan al sistema de la capacidad de manejar entradas y
salidas reales son los Interfaces de Fuzzificación y Defuzzificación. El primero
establece una aplicación entre puntos precisos en el dominio U de las entradas del
sistema y conjuntos difusos definidos sobre el mismo universo de discurso,
mientras que el segundo realiza la operación inversa estableciendo una aplicación
entre conjuntos difusos definidos en el dominio V de las salidas y puntos precisos
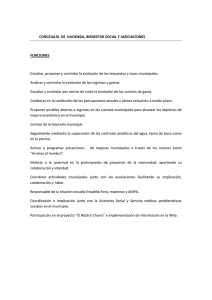
definidos en el mismo universo. La Figura 1.1 muestra la estructura general de los
SBRDs de tipo Mamdani.
Tipos de Sistemas Basados en Reglas Difusas
13
Figura 1.1. Estructura básica de un Sistema Basado
en Reglas Difusas de tipo Mamdani
Los SBRDs de tipo Mamdani serán el centro de estudio de la presente memoria.
Estos SBRDs presentan una serie de características muy interesantes. Por un lado,
proporcionan un marco natural para incluir conocimiento experto en forma de
reglas lingüísticas permitiendo combinar éste con reglas obtenidas a partir de
ejemplos del comportamiento del sistema de un modo muy sencillo. Por otro,
presentan una gran libertad a la hora de elegir los Interfaces de Fuzzificación y
Defuzzificación, así como el Sistema de Inferencia, de tal modo que es posible
diseñar el SBRD más adecuado para un problema concreto. Este aspecto será el
objeto de estudio de esta memoria.
1.1.2 Sistemas Basados en Reglas Difusas de tipo TakagiSugeno-Kang
En 1985, once años después de que se propusiera el primer SBRD de tipo
Mamdani, Takagi y Sugeno [TS85] propusieron un nuevo modelo que empleaba
reglas en las que el antecedente estaba constituido por variables lingüísticas o
difusas y el consecuente representaba una función de las variables de entrada. La
forma más general de este tipo de reglas es la siguiente, en la que el consecuente
constituye una combinación lineal de las variables contenidas en el antecedente de
la regla:
Si X1 es A1 y ... y Xn es An entonces Y = p1 • X1 + ... + pn • Xn + p0,
donde Xi son las variables de entrada del sistema, Y es la variable de salida y los pi
son parámetros reales. En lo que respecta a los Ai, pueden ser etiquetas
lingüísticas asociadas con conjuntos difusos en el caso en que las Xi sean variables
lingüísticas (como en los SBRDs de tipo Mamdani), o bien conjuntos difusos en el
caso en que éstas sean directamente variables difusas. Este tipo de reglas suelen
denominarse reglas difusas de tipo TSK aludiendo a sus creadores. La letra K
procede de un tercer autor, Kang, que desarrolló el modelo con los primeros [SK88].
Introducción a los Sistemas Basados en Reglas Difusas
14
La salida de un SBRD TSK que emplea una Base de Conocimiento formada por
m reglas de este tipo se obtiene como la media ponderada de las salidas
individuales aportadas por cada regla, Yi, i=1...m, del siguiente modo:
m
∑ hi ⋅Yi
i =1
m
∑Yi
,
i =1
donde hi = T(A1(x1), ... ,An(xn)) es el grado de emparejamiento entre la parte
antecedente de la regla i y las entradas actuales al sistema, x = (x1, ... ,xn), y T es un
operador de conjunción que se modela mediante una t-norma.
De este modo, tal y como enuncian sus creadores en [TS85], este SBRD se basa
en dividir el espacio de entrada en varios subespacios difusos y en definir una
relación de entrada - salida lineal en cada uno de esos subespacios. En el proceso de
inferencia se combinan estas relaciones parciales en el modo comentado para
obtener la relación global de entrada - salida, teniendo así en cuenta la dominancia
de las relaciones parciales en sus respectivas áreas de aplicación y el conflicto que
se presenta en las zonas en las que existe un solapamiento.
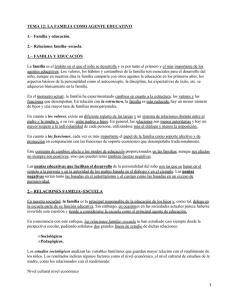
En la Figura 1.2 mostramos una representación gráfica de este segundo tipo de
SBRDs para modelado y control difuso. Los SBRDs TSK han sido aplicados con
éxito a una gran cantidad de problemas prácticos. Su ventaja principal es que
presentan una ecuación compacta del sistema gracias a lo cual es posible estimar
los parámetros pi empleando métodos clásicos, lo que facilita su diseño. Sin
embargo, su mayor inconveniente está también relacionado con la forma de los
consecuentes de las reglas, que no son conjuntos difusos, con lo que no constituyen
un marco de trabajo natural para representar el conocimiento experto. Es posible
integrar conocimiento experto en este tipo de SBRDs efectuando una pequeña
modificación sobre el consecuente de la regla: cuando un experto aporta un regla
lingüística del tipo de las introducidas en la sección anterior con consecuente Y es
B, se sustituye dicho consecuente por Y = p0, donde p0 toma como valor el punto
modal del conjunto difuso asociado a la etiqueta B. Este tipo de reglas se suelen
denominar reglas TSK simplificadas.
Figura 1.2. Estructura básica de un Sistema Basado en Reglas Difusas TSK
Diseño de Sistemas Basados en Reglas Difusas
15
1.2 Funcionamiento y Componentes de los SBRDs
de Tipo Mamdani
Repasando los conceptos introducidos en la sección anterior, un SBRD de tipo
Mamdani está formado por los siguientes componentes:
•
una Base de Conocimiento, que contiene las reglas lingüísticas que guían el
comportamiento del mismo,
•
un Interfaz de Fuzzificación, que se encarga de transformar los datos
precisos de entrada en valores manejables en el proceso de razonamiento
difuso, es decir, en algún tipo de conjunto difuso,
•
un Sistema de Inferencia, que emplea estos valores y la información
contenida en la Base de Conocimiento para llevar a cabo dicho proceso, y
•
un Interfaz de Defuzzificación, que transforma la acción difusa resultante
del proceso de inferencia en una acción precisa que constituye la salida
global del SBRD.
Analizaremos detenidamente cada uno de estos componentes en cada una de las
secciones siguientes.
1.2.1
La Base de Conocimiento
La Base de Conocimiento (BC) es una de las partes esenciales del SBRD desde el
punto de vista de que los tres componentes restantes del sistema se emplean para
interpretar las reglas contenidas en ella y hacerlas manejables en problemas
concretos.
La BC está formada a su vez por dos componentes distintos: la Base de Datos y
la Base de Reglas:
•
La Base de Reglas (BR) está formada por un conjunto de reglas lingüísticas
de tipo ''Si - entonces'' que, en el caso de SBRDs con múltiples entradas y
una única salida, presentan la siguiente estructura:
Si X1 es A1 y ... y Xn es An entonces Y es B,
ya comentada en la Sección 1.1.1. La BR está compuesta por una serie de
reglas de este tipo unidas por el operador también, lo que indica, como
veremos en la sección siguiente, que incluso todas ellas pueden dispararse
ante una entrada concreta. La estructura de una regla lingüística puede ser
Introducción a los Sistemas Basados en Reglas Difusas
16
más general si se emplea otro conectivo u operador de conjunción en lugar
del y para relacionar las variables de entrada en el antecedente. Siem
embargo en trabajos como [Wan94] se demuestra que la estructura de la
regla mostrada anteriormente es lo suficientemente general como para
incluir a otras. Debido a este hecho y a su simplicidad, este tipo de reglas
son las más empleadas en la literatura especializada.
•
La Base de Datos (BD) contiene la definición de los conjuntos difusos
asociados a los términos lingüísticos empleados en las reglas de la BR, así
como los valores de los factores de escala que transforman el universo de
discurso en que están definidas las variables de entrada y salida del sistema.
1.2.2 El Interfaz de Fuzzificación
Este componente es uno de los que permite al SBRD de tipo Mamdani manejar
entradas y salidas reales. Su tarea es la de establecer una aplicación que haga
corresponder un conjunto difuso, definido en el universo de discurso de la entrada
en cuestión, a cada valor preciso del espacio de entrada. Así, el Interfaz de
Fuzzificación trabaja del siguiente modo:
A’ = F ( x0 ),
donde x0 es un valor preciso de entrada al SBRD definido en el universo de discurso
U, A’ es un conjunto difuso definido sobre el mismo dominio U y F es un operador
de fuzzificación.
Principalmente, existen dos posibilidades para la elección de F:
1. Fuzzificación no puntual o aproximada: En este caso, A’ = F ( x0 ) = 1 y el
grado de pertenencia de los restantes valores de U va disminuyendo según
se alejan de x0. Este segundo tipo de operador de fuzzificación permite el
empleo de distintos tipos de funciones de pertenencia. Por ejemplo, en el
caso de una función de pertenencia triangular, se puede emplear el
siguiente:
x − x0
1 −
si x − x 0 ≤ σ
.
µA’ (x) =
σ
0 , en otro caso
2. Fuzzificación puntual: A’ se construye como un conjunto difuso puntual con
soporte x0, es decir, con la siguiente función de pertenencia:
1, si x = x 0
0 , en otro caso
µA’ (x) =
.
Diseño de Sistemas Basados en Reglas Difusas
17
En este caso, los valores lingüísticos obtenidos por el Interfaz de
Fuzzificación son valores numéricos.
Por ejemplo, supongamos un sistema con dos variables de entrada X1 y X2. Si la
variable X1 dispone de una partición en tres etiquetas lingüísticas A, B y C, y la
variable X2 dispone de una partición en cuatro etiquetas D, E, F y G, (nótese que
los nombres de las etiquetas lingüísticas podrían coincidir aunque para cada
variable se trate de etiquetas con particiones lingüísticas diferentes), la acción del
Interfaz de Fuzzificación para la regla
Si X1 es B y X2 es G entonces ...,
consistiría en obtener el valor lingüístico B(x1), y el valor lingüístico G(x2), siendo
x1 y x2 los valores numéricos para las variables de entrada X1 y X2,
respectivamente (x0=(x1, x2)).
La fuzzificación puntual es la más empleada habitualmente y será la utilizada
en esta memoria.
1.2.3 El Sistema de Inferencia
El Sistema de Inferencia es el componente encargado de llevar a cabo el proceso
de inferencia difusa. Para ello, hace uso de principios de la Lógica Difusa para
establecer una aplicación entre conjuntos difusos definidos en U = U1 × U2 × ... × Un
y conjuntos difusos definidos en V (donde U1 , ... ,Un y V son los dominios en los que
están definidas las variables de entrada X1,...,Xn y la de salida Y, respectivamente).
El proceso de inferencia difuso está basado en la aplicación del Modus Ponens
Generalizado, extensión del Modus Ponens de la Lógica Clásica, propuesto por
Zadeh según la siguiente expresión [Zad73]:
Si X es A entonces Y es B
X es A’
Y es B’
Para llevar a la práctica esta expresión es necesario en primer lugar interpretar
el tipo de regla que emplea el SBRD. Una regla con la forma “Si X is A entonces Y
es B” representa una relación difusa entre A y B definida en U × V. Dicha relación
difusa se expresa mediante un conjunto difuso R cuya función de pertenencia µR
(x,y) presenta la forma:
∀x ∈ U, y ∈ V: µR (x,y) = I ( µA (x) , µB (y)),
Introducción a los Sistemas Basados en Reglas Difusas
18
donde µA (x) y µB (y) son las funciones de pertenencia de los conjuntos difusos A y B,
respectivamente, e I es un operador de implicación difuso que modela la relación
difusa existente.
La función de pertenencia del conjunto difuso B’, resultante de la aplicación del
Modus Ponens Generalizado, se obtiene a partir de la Regla Composicional de
Inferencia (RCI), introducida por Zadeh en [Zad73] del siguiente modo: "Si R es una
relación difusa definida de U a V y A’ es un conjunto difuso definido en U, entonces
el conjunto difuso B’, inducido por A’, viene dado por la composición de R y A’ ", es
decir:
B’ = A’ ° R.
De este modo, cuando la RCI se aplica sobre reglas cuyo antecedente está
formado por n variables de entrada y cuyo consecuente presenta una única variable
de salida toma la siguiente expresión:
µB’ (y) = Supx∈U { T’ (µA’ (x) , I (µA (x) , µB (y))) },
donde µA’ (x) = T (µA’1 (x) , ... , µA’n (x)) , µA (x) = T (µA1 (x) , ... , µAn (x)), T y T’ son
operadores de conjunción difusos e I es un operador de implicación.
Puesto que, como comentábamos en la sección anterior, en la mayoría de los
casos el Interfaz de Fuzzificación transforma la entrada xo = (x1 , ... , xn) que recibe
el sistema en una serie de conjuntos difusos puntuales A’1, ... , A’n , la expresión de
la RCI queda finalmente reducida a la forma:
µB’ (y) = I (µA (x0) , µB (y)),
Por tanto, desde un punto de vista operativo, el Sistema de Inferencia de un
SBRD deberá realizar las siguientes tareas sobre cada regla individual de la BC:
•
Determinar µA (x0), mediante el Operador de Conjunción.
•
Aplicar del Operador de Implicación, I.
1.2.3.1 Operadores de Conjunción
El cálculo de µA (x0) de la expresión resultante simplificada de la RCI consiste en
la aplicación de un operador de conjunción sobre los µAi (xi):
µA (x0) = T (µA1 (x1) , ... , µAn (xn)).
El valor que resulta de la agregación de las entradas mediante el operador de
conjunción recibe el nombre de grado de emparejamiento (en adelante lo notaremos
Diseño de Sistemas Basados en Reglas Difusas
19
por h) de dichas entradas con la regla. El grado de emparejamiento representa, en
definitiva, una medida de “coincidencia” de los valores que toman las variables de
entrada con los valores lingüísticos que describen el antecedente de esa regla.
Intuitivamente, el grado de emparejamiento será una información muy útil que
podríamos redactar como “una regla debe ser tenida en cuenta tanto como los
valores de entrada coincidan con la situación que describen sus antecedentes”. Cada
regla contenida en la BC del SBRD tiene asociado un grado de emparejamiento con
las entradas actuales y dicho valor es un número real en [0,1] independientemente
del tipo de fuzzificación aplicado: aproximada o puntual.
El operador de conjunción T se modela habitualmente con una T-norma. Una
función T: [0,1]×[0,1] → [0,1] es una t-norma sii ∀ x, y, z ∈ [0,1] verifica las
siguientes propiedades ([Miz89,GQ91a]):
1.
2.
3.
4.
5.
Existencia de elemento unidad 1: T (1,x) = x
Monotonía: Si x ≤ y entonces T (x,z) ≤ T (y,z)
Conmutatividad: T (x,y) = T (y,x)
Asociatividad: T (x,T(y,z)) = T(T (x,y),z)
T (0,x) = 0
Las t-normas pueden representar el operador de intersección:
µA∩B (x) = T ( µA (x) , µB (x) ).
Las más frecuentemente utilizadas son:
• Producto Lógico o t-norma del mínimo:
TM (x,y) = Min (x, y).
• Producto de Hamacher:
TH (x, y) =
x•y
.
x + y - x•y
• Producto Algebraico:
TA (x,y) = x· y.
• Producto de Einstein:
TE (x, y) =
x• y
.
1 + (1 - x) • (1 - y)
• Producto Acotado o t-norma de Lukasiewicz:
Introducción a los Sistemas Basados en Reglas Difusas
20
TAC (x,y) = Max (0, x+y-1).
• Producto Drástico:
x, si y = 1
TD (x, y) = y, si x = 1
.
0, en otro caso
1.2.3.2 Operadores de Implicación
En la literatura especializada existe una extensa variedad de operadores de
implicación, entre los que destacan por su amplia difusión la familia de las
funciones de implicación [TV85] y la familia de las t-normas [GQ91a, GQ91b].
Los operadores de implicación se pueden clasificar en base a si extienden o
generalizan la implicación o la conjunción booleanas del siguiente modo:
A) Operadores de implicación que extienden la implicación booleana, que
satisfacen la tabla de verdad mostrada en la Tabla 1.1,
a\b
0
1
0
1
0
1
1
1
Tabla 1.1. Tabla de verdad de
la implicación booleana
entre los cuales se encuentran las nombradas funciones de implicación
difusas [TV85] y otros operadores.
B) Operadores de implicación
satisfaciendo la Tabla 1.2,
que
extienden
a\b
0
1
0
1
0
0
0
1
la
conjunción
booleana,
Tabla 1.2. Tabla de verdad de
la conjunción booleana
entre los cuales se encuentran las t-normas actuando como operadores de
implicación (en la Sección 1.2.3.1 fueron introducidas como operadores de
conjunción).
C) Operadores de implicación que no verifican las tablas de verdad de la
implicación ni de la conjunción booleanas.
Diseño de Sistemas Basados en Reglas Difusas
21
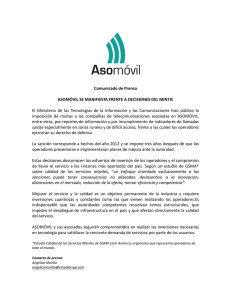
En las siguientes subsecciones se van a mostrar algunos de los operadores de
implicación más representativos de estas familias, su expresión matemática y la
representación gráfica del conjunto difuso B’ resultado de inferir usando cada una
de ellas sobre el conjunto difuso trapezoidal B de la Figura 1.3. Los conjuntos
difusos inferidos se mostrarán marcados en las representaciones gráficas con trazo
más oscuro.
Figura 1.3. Consecuente trapezoidal de una regla
A) Operadores de Implicación que Extienden la Implicación Booleana
Destacan en la literatura especializada dos grupos de operadores de implicación
que extienden la implicación booleana: las funciones de implicación difusa y otros
operadores que, generalizando también la implicación booleana, no pertenecen a
una familia con propiedades matemáticas bien definidas.
Funciones de Implicación:
Una función continua I: [0,1]×[0,1] → [0,1] es una función de implicación difusa
sii ∀ x, x', y, y', z ∈ [0,1] verifica las siguientes propiedades ([TV85]):
1.
2.
3.
4.
5.
Si x ≤ x' entonces I (x,y) ≥ I (x',y).
Si y ≤ y' entonces I (x,y) ≤ I (x,y').
Principio de Falsedad: I (0,x) = 1.
Principio de Neutralidad: I (1,x) = x.
Principio de Intercambio: I (x,I(y,z))=I (y,I(x,z)).
Se clasifican en a su vez en las siguientes familias [TV85]:
• Implicaciones Fuertes (S-Implicaciones).
Se corresponden con la definición de la implicación clásica de la lógica
booleana
A → B = ¬A ∨ B
y son de la forma
Introducción a los Sistemas Basados en Reglas Difusas
22
I (x,y) = S ( N (a), b ),
donde S es una t-conorma, y N una función de negación.
A continuación se muestra la S-Implicación de Diene, cuya expresión es:
I (x,y) = Max (1-x, y).
La Figura 1.4 muestra gráficamente el conjunto difuso inferido por la
función de implicación de Diene, partiendo del conjunto difuso trapezoidal de
la Figura 1.3.
Figura 1.4. S-Implicación de Diene
•
Implicaciones Residuales (R-Implicaciones).
Estas funciones de implicación se obtienen por residuación de una t-norma T
de este modo:
I (x,y) = Sup { c : c ∈ [0,1] / T (c,x) ≤ y }.
Como representativa de esta subfamilia, mostramos la R-Implicación de
Goguen, Figura 1.5, cuya expresión es:
Min(1, y/x), si x ≠ 0
I(x, y) =
.
en otro caso
1,
Figura 1.5. R-Implicación de Goguen
•
Implicaciones Fuertes y Residuales (S y R-Implicaciones).
Estas funciones de implicación se corresponden con la definición de la
implicación clásica (S) y además pueden ser obtenidas por residuación de
una T-norma (R), por lo que verifican las propiedades de las dos subfamilias.
Diseño de Sistemas Basados en Reglas Difusas
23
La más representativa es la de Lukasiewicz, ilustrada en la Figura 1.6, cuya
expresión es:
I (x,y) = Min (1, 1-x+y).
Figura 1.6. S y R-Implicación de Lukasiewicz
Otros operadores que extienden la Implicación Booleana
Existen otros operadores de implicación difusos que, cumpliendo la Tabla 1.1, no
son funciones de implicación difusas. Un operador representativo de este grupo
mostrado gráficamente en la Figura 1.7, presenta siguiente expresión:
1,
I(x, y) =
y,
si y = x
.
en otro caso
Figura 1.7. Operador de la familia de los
que extienden la Implicación Booleana
B) Operadores de Implicación que Extienden la Conjunción Booleana: Tnormas
En este grupo destaca por su amplia difusión práctica la familia de las t-normas
como operadores de implicación difusos [GQ91a,Miz89]. En la Sección 1.2.3.1 se
presentó la definición de este tipo de funciones junto con las expresiones de las más
conocidas. La Figura 1.8 muestra gráficamente el conjunto inferido con la t-norma
del producto lógico (t-norma del mínimo) mientras que la Figura 1.9 pertenece a la
t-norma del producto algebraico.
Introducción a los Sistemas Basados en Reglas Difusas
24
Figura 1.8. T-norma del producto lógico o
t-norma del mínimo I (x,y) = Min (x, y)
Figura 1.9. T-norma del producto algebraico,
I (x,y) = x· y
C) Operadores de implicación que no verifican las tablas de verdad de la
implicación ni de la conjunción booleanas
En [KKS85,CK89,CPK92] se muestran algunos operadores que no pertenecen a
ninguna de los grupos de operadores citados previamente como extensiones de la
implicación y de la conjunción booleanas. La siguiente expresión corresponde a un
operador con estas características:
I38 (x,y) = Min (I’ (x,y), I’ (1-x,1-y)),
si x ≤ y
1,
,
y, en otro caso
donde I'(x,y) =
y su correspondiente conjunto difuso inferido se muestra en la Figura 1.10.
cuando h≥ ½:
cuando h≤ ½:
Figura 1.10. Otro operador de implicación
Diseño de Sistemas Basados en Reglas Difusas
25
1.2.4 El Interfaz de Defuzzificación
Como se ha descrito en la Sección 1.2.3, el modo de trabajo del Sistema de
Inferencia de un SBRD de tipo Mamdani se aplica al nivel de regla individual. Una
vez aplicada la RCI sobre las m reglas que componen la BR, se obtienen m
conjuntos difusos B’i que representan las acciones difusas que ha deducido el SBRD
a partir de las entradas que recibió.
Para realizar el proceso de defuzzificación se emplean una serie de parámetros
asociados al conjunto difuso inferido o bien a la regla que lo generó. Estos son los
Grados de Importancia y los Valores Característicos, los cuales se describen a
continuación.
Los Grados de Importancia de una regla Ri de la BC son los siguientes:
• El Área de un conjunto difuso B’ viene definida por la expresión:
s = ∫ µ B' (u) du .
U
•
El Grado de Emparejamiento (anteriormente comentado en la Sección
1.2.3.1) de una regla Ri, que contiene las variables lingüísticas A1,...,An, para
los valores numéricos x1,...,xn de las variables de entrada, se define como:
hi = T(µA1(x1), ... µAn(xn)).
•
La Altura de un conjunto difuso B’ se define como:
l = Sup µB' (x) .
x∈X
En la definición de la mayoría de los métodos de defuzzificación se suelen
emplear los citados grados de importancia combinados con los Valores
Característicos que a continuación de describen:
•
Punto de Máximo Valor (PMV) de un conjunto difuso B’ :
G = x ∈ X µB’ (x) = l.
Cuando más de un valor de x satisface la condición, el Punto de Máximo
Valor se puede obtener por varios métodos [HDR93, HT93, Hel93]: tomando
el menor, el mayor o la media de ambos, siendo éste último el empleado en
este trabajo.
•
Centro de Gravedad (CG) de un conjunto difuso B’ :
Introducción a los Sistemas Basados en Reglas Difusas
26
W=
∫Y y• µB' (y) dy .
∫Y µ B' (y) dy
Puesto que el sistema debe devolver una salida precisa, el Interfaz de
Defuzzificación asume la tarea de combinar o agregar la información aportada por
los conjuntos difusos individuales y transformarla en un valor preciso. Existen dos
formas de trabajo distintas para ello [ETG98] que se describirán en las siguientes
subsecciones 1.2.4.1 y 1.2.4.2.
1.2.4.1 Defuzzificación en Modo A – FATI
El Modo A – FATI, consiste en agregar primero y defuzzificar después (First
Aggregate Then Infer) de acuerdo con las dos siguientes etapas:
1. Agregar los conjuntos difusos individuales inferidos, B’i, para obtener un
conjunto difuso final B’, empleando para ello un operador de agregación
difuso, G, que modela el operador también que relaciona las reglas de la BC:
µB’ (y) = G { µB’1 (y) , µB’2 (y) , ... , µB’n (y) }.
Posteriormente se describirán los operadores de agregación.
2. Transformar el conjunto difuso B’ así obtenido en un valor preciso, y0, que
sería proporcionado como salida del sistema global, mediante un método de
defuzzificación, D:
y = D (µB’ (y)).
Operadores de Agregación modelando el operador “también”:
Como se ha indicado, esta agregación es un proceso encaminado a combinar la
información procedente de los conjuntos difusos que provienen de la inferencia de
cada regla de la BC. El problema que se plantea es pues la definición de ese
operador de agregación o combinación que obtenga un conjunto difuso B’ partiendo
de los conjuntos difusos individuales B’i. Los operadores de agregación más
comúnmente utilizados son las funciones t-normas y las t-conormas.
Las t-normas fueron descritas en la Sección 1.2.3.1. La t-norma más utilizada
como operador de agregación es la del mínimo y, cuando se emplea se dice que se
trabaja en el modo MAR (Mamdani Approximate Reasoning)[ETG98].
Las t-conormas se definen a continuación:
Diseño de Sistemas Basados en Reglas Difusas
27
Una función S: [0,1]×[0,1] → [0,1] es una t-conorma sii ∀ x, y, z ∈ [0,1] verifica
las siguientes propiedades ([Miz89,GQ91a]):
1.
2.
3.
4.
5.
Existencia de elemento unidad, 0: S (0,x) = x.
Monotonía: Si x≤y entonces S (x,z) ≤ S (y,z).
Conmutatividad: S (x,y) = S (y,x).
Asociatividad: S (x,S (y,z)) = S (S (x,y),z).
Existencia de elemento unidad 1: S (1,x) = 1.
Las t-conormas pueden representar el operador unión:
µA∪B (x) = S ( µA (x) , µB (x) ).
Las más conocidas son:
• Máximo:
S ( x , y ) = max ( x , y ).
• Suma Acotada:
S ( x , y ) = min ( 0 , x + y - 1 ).
• Suma Algebraica:
S ( x , y ) = x + y - x ⋅ y.
La t-conorma más empleada como operador de agregación es la del máximo y
cuando se emplea se dice que se trabaja en el modo FLR (Formal Logical
Reasoning) [ETG98].
Desde un punto de vista lógico, la elección del operador de agregación en el Modo
A – FATI se realiza en relación con el operador de implicación utilizado para la
inferencia. Desde este punto de vista, las funciones de implicación sólo deberían
utilizarse con el operador de agregación t-norma del mínimo mientras que los
operadores de implicación t-norma deberían utilizar el operador de agregación tconorma del máximo. Sin embargo en la literatura especializada se puede observar
que no se sigue esta pauta, por lo que en la presente memoria se van a analizar
todas las combinaciones.
Métodos de Defuzzificación del Modo A – FATI
Para realizar la anteriormente citada defuzzificación del conjunto difuso
resultante de la agregación B’, las posibilidades más comunes son las dos
siguientes:
Introducción a los Sistemas Basados en Reglas Difusas
28
•
La Media de los Máximos (habitualmente llamado MOM en la literatura
especializada) del conjunto difuso B’:
y1 = Inf { z/µB’ (z) = Sup µB’ (y)},
y2 = Sup { z/µB’ (z) = Sup µB’ (y)},
y0 =
•
y1 + y2
.
2
El Centro de Gravedad del conjunto difuso B’:
∫ y ⋅ µB' ( y ) dy
y0 = Y
.
∫Y µB' ( y ) dy
Combinando estas dos formas de defuzzificar el conjunto difuso B’ con los
operadores de agregación mínimo y máximo para los conjuntos difusos B’i, se
dispone de los cuatro métodos de defuzzificación siguientes operando en Modo A –
FATI:
•
Media de los Máximos del conjunto difuso B’ resultado de agregar los
conjuntos difusos individuales B’i con el conectivo mínimo (MAR).
•
Centro de Gravedad del conjunto difuso individual B’ resultado de agregar
los conjuntos difusos individuales B’i con el conectivo mínimo (MAR).
•
Media de los Máximos del conjunto difuso B’ resultado de agregar los
conjuntos difusos individuales B’i con el conectivo máximo (FLR).
•
Centro de Gravedad del conjunto difuso individual B’ resultado de agregar
los conjuntos difusos individuales B’i con el conectivo máximo (FLR).
1.2.4.2 Defuzzificación en Modo B – FITA
El Modo B – FITA, consiste en defuzzificar primero y agregar después (First
Infer Then Aggregate). En este modo de trabajo, se considera individualmente la
contribución de cada conjunto difuso inferido y la acción precisa final se obtiene
mediante algún tipo de operación (bien una media, una suma ponderada o la
selección de uno de ellos, entre otros) efectuada sobre un valor preciso
característico obtenido a partir de cada conjunto difuso individual. De este modo, se
evita el calculo del conjunto difuso final B’, lo que ahorra una gran cantidad de
tiempo de cálculo. Este modo de operación supone una aproximación distinta al
concepto representado por el operador también.
Diseño de Sistemas Basados en Reglas Difusas
29
Existen gran variedad de métodos de defuzzificación que emplean el Modo B –
FITA, los cuales pueden clasificarse en familias según como estén formados. A
continuación se muestra un conjunto representativo de las citadas familias:
•
Sumas ponderadas por grados de importancia [Tsu79,HDR93,HT93,
CCCHP94]:
o
Centro de Gravedad ponderado por el área si:
y0 =
∑ si ⋅ W i
i
.
∑ si
i
o
Centro de Gravedad ponderado por la altura li:
y0 =
∑ li ⋅ Wi
i
.
∑ li
i
o
Centro de Gravedad ponderado por el grado de emparejamiento hi:
∑ hi ⋅ Wi
y0 = i
.
∑ hi
i
o
Punto de Máximo Valor ponderado por el área:
∑ si ⋅ G i
y0 = i
.
∑ si
i
o
Punto de Máximo Valor ponderado por la altura:
y0 =
∑ li ⋅ Gi
i
.
∑ li
i
o
Punto de Máximo Valor ponderado por el grado de emparejamiento:
∑ hi ⋅ Gi
y0 = i
.
∑ hi
i
Introducción a los Sistemas Basados en Reglas Difusas
30
•
Basados en el conjunto difuso de mayor grado de importancia [HDR93,
HT93, Hel93, PYL92, RG93a, CCCHP94]:
o
Centro de Gravedad del conjunto difuso con mayor área:
B’k = { B’i si = Max (st), ∀ t ∈ {1,...,m} },
y0 = Wk.
o
Centro de Gravedad del conjunto difuso con mayor altura:
B’k = { B’i li = Max (lt), ∀ t ∈ {1,...,m} },
y0 = Wk.
o
Centro de Gravedad del conjunto difuso de mayor grado de
emparejamiento:
B’k = { B’i hi = Max (ht), ∀ t ∈ {1,...,m} },
y0 = Wk.
o
Punto de Máximo Valor del conjunto difuso con mayor área:
B’k = { B’i si = Max (st), ∀ t ∈ {1,...,m} },
y0 = Gk.
o
Punto de Máximo Valor del conjunto difuso de mayor altura:
B’k = { B’i yi = Max (yt), ∀ t ∈ {1,...,m} },
y0 = Gk.
o
Punto de Máximo Valor del conjunto difuso de mayor grado de
emparejamiento:
B’k = { B’i hi = Max (ht), ∀ t ∈ {1,...,m} },
y0 = Gk.
•
Otros [HDR93,HT93,Hel93,CCCHP94]:
o
Media de los Máximos Valores:
y0 =
o
∑ Gi
i
m
Media del Mayor y Menor Valor:
.
Diseño de Sistemas Basados en Reglas Difusas
31
Gmin = Min Gi , ∀ i ∈ {1,...,m}
Gmax = Max Gi , ∀ i ∈ {1,...,m}
y0 =
o
Gmin + Gmax
.
2
Centro de Sumas:
y0 =
∑ ∫Y y ⋅ µB' i( y ) dy
i
∑ ∫Y µB' i( y ) dy
.
i
Aunque históricamente el primero de los dos modos de trabajo propuestos fue el
Modo A – FATI, que ya era empleado por Mamdani en su primera aproximación al
control difuso [Mam74], en los últimos años el Modo B – FITA está siendo muy
utilizado [DHR93,SY93].
1.3 Diseño de Sistemas Basados en Reglas Difusas
El buen comportamiento de un SBRD depende directamente de dos factores, la
forma en que realiza el proceso de inferencia y la composición de la BC que maneja.
De este modo, el proceso de diseño de este tipo de sistemas engloba dos tareas
principales:
1. Diseño del Sistema de Inferencia, es decir la elección de los distintos
operadores de conjunción e implicación que se emplearán para realizar
dicho proceso.
2. Obtención de una BC que contenga información adecuada con respecto al
problema que se pretende resolver.
Esta memoria se centra en el estudio de la primera tarea de diseño citada, la
cual es desarrollada brevemente en la sección siguiente. Posteriormente,
analizaremos brevemente el proceso de obtención de la BC.
1.3.1 Diseño del Sistema de Inferencia
La complejidad de esta primera tarea depende del tipo de SBRD con el que se
esté trabajando. Como hemos visto en las secciones anteriores, el mecanismo de
inferencia de los SBRDs de tipo Mamdani es más complejo y necesita de la
definición de un mayor número de operadores que en el caso de los SBRDs TSK. En
32
Introducción a los Sistemas Basados en Reglas Difusas
este último caso, la única tarea de diseño que es necesario llevar a cabo es la
elección del operador de conjunción T empleado para calcular el grado de
emparejamiento de cada regla con las entradas actuales del sistema, hi. Este
operador se modela habitualmente empleando una t-norma y las elecciones más
habituales son el mínimo o el producto algebraico.
Cuando se trabaja con sistemas de tipo Mamdani, la complejidad en el diseño del
mecanismo de inferencia aumenta en gran medida. En ese caso, es necesario
definir la composición de tres de los elementos anteriormente introducidos: el
Sistema de Inferencia y los Interfaces de Fuzzificación y Defuzzificación. Para ello,
se deben tomar las siguientes decisiones [KKS85]:
1. Definir el conectivo y, es decir, elegir el operador de conjunción T a usar en
el caso de que las reglas de la base presenten más de una variable de
entrada. Para esta elección se dispone de distintos operadores de la familia
de las t-normas.
2. Definir el operador de implicación en las reglas lingüísticas de tipo “Si–
entonces” contenidas en la BC, es decir, elegir el operador I que se empleará
para modelar la implicación.
Como ya hemos indicado, existen distintas posibilidades para la elección
de este operador. En el primer modelo de SBRD de este tipo, Mamdani
empleó la t-norma del mínimo [Mam74], lo que ha provocado que varios
operadores pertenecientes a esta misma familia hayan sido posteriormente
empleados para dicha tarea [GQ91b]. Por otro lado, la familia de las
funciones de implicación ofrece una amplia variedad de operadores de
implicación clasificados en distintos grupos, dependiendo del modo en que
interpretan la implicación difusa [TV85]. Algunos autores han sugerido
también que no pertenecen a ninguna de las dos familias: extensiones de la
conjunción booleana y extensiones de la implicación booleana [CK89,CPK92,
KKS85].
3. Definir matemáticamente la composición de relaciones difusas a aplicar en
la Regla Composicional de Inferencia. El operador de composición empleado
es el Sup-T, donde T es una t-norma. Habitualmente, se emplean cuatro
tipos de composición basados en otras tantas t-normas: el mínimo, el
producto algebraico, el producto acotado y el producto drástico. Las más
usadas son las dos primeras [Lee90].
4. Definir el operador de agregación también, es decir, elegir el operador G
según el modo de defuzzificación que emplee el SBRD. Como se ha visto, en
caso de trabajar en Modo A – FATI, la función del operador de agregación
sería la de agregar todos los conjuntos difusos individuales resultantes de la
inferencia en un único conjunto difuso global. Para esa tarea se emplean
Diseño de Sistemas Basados en Reglas Difusas
33
habitualmente las t-normas y las t-conormas, principalmente el mínimo y el
máximo, respectivamente, por su sencillez.
Por otro lado, en caso de trabajar en Modo B – FITA, los operadores
habitualmente empleados son la media, la media ponderada o la selección
de algún valor característico de los conjuntos difusos, en función de algún
grado de importancia de la regla que los ha generado en el proceso de
inferencia. Como valores característicos se suelen emplear el Centro de
Gravedad y el Punto de Máximo Valor, y como grados de importancia de la
regla, el área y la altura del conjunto difuso inferido, o el grado de
emparejamiento de los antecedentes de la misma con la entrada actual al
sistema.
5. Definir el método de defuzzificación D a emplear para transformar los
conjuntos difusos individuales o globales resultantes del proceso de
inferencia en valores precisos de salida. Los más habituales son el Centro de
Gravedad y la Media de los Máximos Valores [DHR93], cuando se trabaja en
Modo A – FATI, y el Centro de Gravedad y el Punto de Máximo Valor, al
hacerlo en Modo B – FITA.
1.3.2 Obtención de la Base de Conocimiento
La BC es el único componente del SBRD que depende directamente de la
aplicación específica. La precisión del SBRD está muy relacionada con su
composición.
1.3.2.1 Tareas de Diseño para obtener la Base de Conocimiento
Al igual que en el diseño del Sistema de Inferencia, la generación de la BC
conlleva una serie de tareas de diseño, que son las siguientes:
•
Selección de las variables relevantes de entrada y salida al sistema, de entre
todas las variables disponibles. Ésta puede ser efectuada por un experto o
bien empleando métodos estadísticos, basados en analizar la correlación
existente entre las variables de las que se dispone, o combinatorios, que
analizan la influencia de conjuntos formados por distintas combinaciones de
variables [BD95].
•
Descripción de la estructura de la BD que contendrá la semántica de los
términos que pueden tomar como valor las variables lingüísticas de entrada
y salida, lo cual incluye las siguientes subtareas relacionadas:
o
definición de los factores de escala,
Introducción a los Sistemas Basados en Reglas Difusas
34
•
o
elección de los conjuntos de términos posibles para cada variable
lingüística, lo que permite determinar la granularidad deseada en el
sistema,
o
elección del tipo de función de pertenencia a emplear: triangulares,
trapezoidales, gausianas o exponenciales, principalmente [DHR93].
Las dos primeras presentan la ventaja de su simplicidad a la hora de
efectuar los cálculos computacionales mientras que las dos últimas la
de tener una transición más suave,
o
definición de la función de pertenencia del conjunto difuso concreto
asociado a cada etiqueta lingüística.
Derivación de las reglas lingüísticas que compondrán la base de reglas del
sistema. Para ello será necesario determinar el número de éstas así como su
composición, mediante la definición del antecedente y el consecuente.
Hay cuatro modos de obtener las reglas difusas del SBRD, los cuales no
son mutuamente exclusivos [Ber93,Lee90]:
1. Experiencia del Experto y Conocimientos del Ingeniero de Control. Es
la más ampliamente utilizada, siendo efectiva cuando el operador
humano es capaz de expresar lingüísticamente las reglas de control
que él mismo utiliza para controlar el sistema. Estas reglas son
generalmente de tipo Mamdani.
2. Modelando las Acciones de Control de un Operador. Las acciones de
control se deducen realizando un modelo de las acciones de un
operador sin que éste intervenga.
3. Realizando un Modelado Difuso del Proceso. Consiste en desarrollar
un modelo difuso del sistema y construir las reglas de la BC a partir de
él. Esa aproximación es similar a la utilizada tradicionalmente en la
Teoría de Control. En consecuencia, se precisa de una identificación de
parámetros [PDH97].
4. Basándose en Aprendizaje y Auto-Organización. Esta posibilidad se
basa en la habilidad de crear y modificar las reglas de control para
mejorar los resultados del controlador utilizando métodos automáticos.
Capítulo 2
Implementación de Sistemas Basados
en Reglas Difusas para Modelado y
Control Difuso
Este capítulo está destinado al estudio de la implementación práctica de SBRDs.
Inicialmente se muestra la diversidad de opciones disponibles para el diseño de
SBRDs. Entre ellas, la opción más flexible para llevar a cabo un estudio
comparativo de los operadores de inferencia y métodos de defuzzificación consiste
en la codificación del SBRD mediante software.
Se exponen las dos metodologías más comunes para la implementación de los
SBRDs: el Método Exacto y el Método Aproximado. El primero de ellos se muestra
como el más preciso pero al mismo tiempo el que mayores dificultades presenta
para ser llevado a la práctica. El Método Aproximado por contra permite unas
implementaciones más sencillas a costa de una pérdida de precisión y velocidad de
respuesta.
Finalmente, el capítulo concluye mostrándose una experimentación con el fin de
observar, sobre todo, las pérdidas de precisión de las implementaciones basadas en
el Método Aproximado con respecto al Método Exacto.
2.1 Marco para la Implementación de SBRDs
Los SBRDs adoptan diferente morfología tanto por sus principios de diseño como
por su funcionalidad. Esta sección dibuja ese espectro de posibilidades tanto desde
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
36
el punto de vista del diseño como desde el punto de vista de los objetivos para los
que se diseña el SBRD.
2.1.1 Alternativas para el Diseño de SBRDs
En la práctica, cuando se desea utilizar un SBRD como herramienta, se dispone
de las siguientes alternativas :
1. Utilizar dispositivos electrónicos específicos para aplicaciones de control.
Pueden ser principalmente de dos tipos:
•
Coprocesadores Difusos, que son dispositivos electrónicos específicos para
realizar operaciones de inferencia de modo subordinado a
microprocesadores o microcontroladores de propósito general, por ejemplo,
el dispositivo VY86C570 de Togai Infralogic, Inc.
•
Microcontroladores que tengan instrucciones y registros específicos para
llevar a cabo la inferencia difusa.
2. Emplear dispositivos electrónicos programables tales como las Field
Programmable Gate Arrays (FPGAs) [HHG96], tanto como anfitrión del
SBRD final como para depurar diseños ASIC (Application Specific
Integrated Circuit). Las FPGAs pueden ser programadas en base a una
especificación utilizando lenguaje VHDL (bien orientado a especificación
algorítmica o bien a estructural), o empleando entrada directa de esquemas.
Emplear estos dispositivos proporciona una elevada flexibilidad de diseño y
los SBRDs implementados de esta forma consiguen una velocidad de
respuesta muy elevada. Por contra, los operadores difícilmente pueden ser
complejos por las restricciones en el número de bloques funcionales del
dispositivo y por la dificultad intrínseca al método de desarrollo.
3. Utilizar microprocesadores o microcontroladores de uso general sobre los
que se implementa el SBRD mediante software. En tal caso se presentan las
siguientes opciones:
•
Manejar programas de los llamados “entornos difusos” (“fuzzy shells”), los
cuales toman como entrada la información para crear la BC, y permiten
en algunos casos elegir entre una serie de operadores, para finalmente
generar automáticamente el código para varios microprocesadores o
microcontroladores comerciales. Es el caso del ampliamente difundido
entorno fuzzyTECH empleado por ejemplo en [RPPARP99].
•
Reutilizar bibliotecas de implementaciones de SBRDs diseñadas
específicamente para ser utilizadas por los programadores e incorporadas
en sus propios programas.
Marco para la Implementación de SBRDs
37
•
Implementar un SBRD guiado por tabla, lo cual consiste en implementar
una tabla y un algoritmo de interpolación. La tabla tendrá pares de
valores para las variables de las entradas y las salidas con la respuesta
proporcionada por un SBRD válido para esa aplicación. El SBRD guiado
por tabla interpola su respuesta basándose en los ejemplos disponibles en
la tabla. Dicha tabla habrá sido obtenida de un SBRD resuelto por
cualquier otro de los dos métodos anteriormente citados. Este tipo de
implementación se utiliza cuando se necesitan sistemas reales con
respuesta rápida en ordenadores de baja velocidad o cuando la inferencia
difusa que se desea realizar es excesivamente compleja para la capacidad
de cálculo del ordenador disponible.
•
Codificar el SBRD por uno mismo. Los SBRDs realizados por este método
tendrán, en líneas generales, respuestas más lentas que los dispositivos
hardware. Sin embargo, se trata del método más flexible desde el punto de
vista del diseñador para estudiar el comportamiento de distintas opciones
de diseño del controlador.
Observando las alternativas, podemos concluir que el empleo de FPGAs y la
implementación software por uno mismo son los métodos que permiten acoplar con
libertad diferentes modos de llevar a cabo la inferencia difusa. Para la realización
de ésta memoria se ha utilizado el método de la implementación software en
lenguaje de alto nivel ya que el objetivo es diseñar SBRDs con cualquier
combinación de operadores de conjunción, implicación y métodos de defuzzificación.
Durante el resto de este capítulo se va a describir cómo llevar a cabo
implementaciones software de SBRDs para su utilización sobre ordenadores
genéricos, si bien algunas de las técnicas serán extensibles también al diseño
mediante FPGAs.
2.1.2 Métodos de Implementación
Fundamentalmente se puede optar por dos métodos para llevar a cabo la
implementación software o mediante FPGAs de SBRDs para modelado y control
difuso:
•
Método Exacto: Consiste en calcular, en primer lugar, una representación
paramétrica de los conjuntos difusos inferidos para cada operador de
implicación que se utilice e incorporar el resultado de este estudio en una
estructura de datos. El principal inconveniente de este método es la
necesidad de realizar el cálculo de la expresión paramétrica del conjunto
difuso inferido antes de realizar la implementación. Posteriormente, en la
implementación del Interfaz de Defuzzificación también pueden encontrarse
dificultades con algunos métodos que trabajen en el Modo A – FATI debido
al proceso de agregación de los conjuntos difusos individuales. Otro
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
38
problema a considerar son los operadores que infieren conjuntos difusos con
tramos de línea curva aún considerando funciones de pertenencia lineales a
trozos ya que se precisan mecanismos adicionales para poder incorporarlos a
las implementaciones con éste método.
•
Método Aproximado: Debido a las desventajas citadas anteriormente, en
muchas ocasiones se utiliza este tipo de método de implementación que
evita el cálculo previo de la expresión paramétrica del conjunto difuso
inferido a base de discretizar el universo de discurso del consecuente en un
número predeterminado de puntos. Sin embargo, este método será
considerablemente más lento que el método exacto desde el punto de vista
computacional y utilizará más memoria. Además, su nivel de precisión a
priori dependerá directamente de la granularidad de la discretización. Al no
tener que calcular expresiones paramétricas de conjuntos difusos, trabajar
con operadores de implicación cuyo conjunto inferido tenga curvas no
supone complejidad adicional. Finalmente, este método tampoco presenta
dificultades especiales para codificar algoritmos para los métodos de
defuzzificación del Modo A – FATI.
2.1.3 Tipos de SBRDs para Modelado y Control Difuso
Desde el punto de vista de la implementación, podemos distinguir dos tipos de
SBRDs en función del número de operadores (de conjunción e implicación), y
métodos de defuzzificación de los que disponga la implementación para una misma
tarea:
•
SBRDs Mono-operador: Son aquellos con un solo operador para cada tarea
del proceso de inferencia. Estos SBRDs son los utilizados convencionalmente
para aplicaciones específicas (por ejemplo, los controladores difusos
empotrados). Sus estructuras de datos están adaptadas exclusivamente
para los operadores que utilizan. Los algoritmos considerados adoptan su
forma más simple y en muchas ocasiones distintas partes del SBRD se
funden en un mismo algoritmo, por lo que puede no ser posible distinguir las
diferentes tareas claramente por partes en el código del programa.
•
SBRDs Multi-operador: Estas implementaciones presentan más de un
operador que puede seleccionarse por cada tarea. Las estructuras de datos
son genéricas y las diferentes componentes del controlador se encuentran
claramente separadas algorítmicamente y por tanto en el código. Estos
SBRDs permiten comparar el comportamiento de motores de inferencia
construidos con distintos operadores de conjunción, implicación y métodos
de defuzzificación. Por ejemplo, un SBRD Multi-operador podría utilizarse
para generar diferentes tablas de pares entradas / salidas para codificar
SBRDs empotrados guiados por tabla.
Implementaciones Software de SBRDs: Estructuras de Datos
39
Es importante subrayar que los SBRDs Mono-operador y Multi-operador
podrían implementarse utilizando el Método Exacto o el Método Aproximado. Sin
embargo, normalmente, si se utiliza un solo operador de implicación para el
Sistema de Inferencia y un solo método para el Interfaz de Defuzzificación (es decir,
un SBRD Mono-operador) se deben estudiar las expresiones resultantes para
condensar y simplificar las estructuras de datos y algoritmos. Estas
simplificaciones deben ser reflejadas en el algoritmo final, lo cual es coherente en la
práctica con la filosofía de los SBRDs empotrados para control difuso en los que el
ordenador de control suele ser un pequeño sistema donde los recursos deben ser
cuidadosamente optimizados. Por otro lado, los SBRDs Multi-operador necesitan
estructuras de datos y algoritmos claramente separados y con interfaces entre
módulos bien definidas y estandarizadas para poder ensamblar distintos
operadores de conjunción e implicación y métodos de defuzzificación.
2.2 Implementaciones
Software
Estructuras de Datos
de
SBRDs:
La elección de las estructuras de datos no es un problema con una única
solución. Además, en muchos casos depende del compilador o del intérprete
utilizado. En esta sección se describirán las estructuras de datos más usuales para
implementar SBRDs genéricos. En concreto, se estudiarán las de la BC y el
Sistema de Inferencia.
2.2.1 Estructuras de Datos para la Base de Conocimiento
La estructura de datos de la BC envuelve dos tipos de información
conceptualmente clasificados en el Capítulo 1 como Base de Datos (BD) y Base de
Reglas (BR). Generalmente, salvo para aplicaciones específicas (SBRDs adaptativos
que modifican sus normas de comportamiento en función de los resultados
obtenidos por las acciones previamente administradas), la BC es una estructura de
datos estática con un tamaño predefinido y un contenido fijo. La estructura de
datos de la BC y su correspondiente información debe ser especificada antes de que
el SBRD comience a funcionar. La información sobre los conjuntos difusos
asociados a los términos lingüísticos empleados en las reglas difusas constituye la
BD. Para simplificar los cálculos, en la implementación práctica de SBRDs se
suelen emplean funciones de pertenencia lineales a trozos de modo que cada
conjunto difuso se define generalmente por una representación paramétrica con
tres o cuatro puntos. La Figura 2.1 muestra un ejemplo de representación
paramétrica de un conjunto difuso trapezoidal en función de cuatro puntos (x0, x1,
x2, x3). Siempre asumimos que los conjuntos difusos están normalizados por lo que
40
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
no es necesario almacenar su altura. En caso contrario bastaría con añadir un valor
por cada conjunto difuso para almacenar su altura.
Figura 2.1. Puntos que describen la
función de pertenencia trapezoidal
Los valores de estos tres o cuatro puntos de definición del conjunto difuso están
definidos en el universo de discurso de la variable correspondiente. La Figura 2.2
muestra un ejemplo de la partición del universo de una variable en cinco conjuntos
difusos trapezoidales.
Figura 2.2. Partición difusa con los conjuntos difusos VS (muy pequeño),
S (pequeño), M (medio), L (grande) y VL (muy grande)
Así pues, cada conjunto difuso de cada una de las particiones difusas de las
variables debe ser descrito y almacenada para constituir la BD. La información
correspondiente a la BR consiste en un conjunto de reglas en el que cada una hace
referencia a sus correspondientes conjuntos difusos de la BD.
A continuación se proponen dos posibles estructuras de datos para almacenar la
BC de modo que pueda utilizarse una u otra en función de la capacidad o facultad
del lenguaje de codificación de que se disponga:
1. Para compiladores avanzados, una estructura de datos óptima podría ser la
que consiste en una matriz de registros, donde cada registro es una regla de
la BR con varios campos: las variables de la regla (antecedentes y
consecuentes), los cuales serán de tipo numérico o puntero. Estos cursores o
punteros serán la referencia a otra matriz de conjuntos difusos, es decir, a
una estructura que consiste en una matriz de registros la cual tiene tres o
Implementaciones Software de SBRDs: Estructuras de Datos
41
cuatro campos asociados en función de la forma de los conjuntos difusos,
triangulares o trapezoidales, de elementos numéricos de tipo número real. La
Figura 2.3 muestra esta estructura de datos en el caso de reglas con dos
antecedentes, a1 y a2 , y un solo consecuente c.
Figura 2.3. Una estructura de datos para la BC
En algunas ocasiones puede ser útil considerar un número variable de
reglas o conjuntos difusos para utilizar varias BCs. En estos casos, las
matrices estáticas pueden sustituirse por listas en memoria dinámica.
2. Cuando el ordenador que va a contener la implementación software del
SBRD es un microcontrolador, puede ocurrir que se disponga de un
compilador bastante simple (por ejemplo, un subconjunto del ANSI C) o de
un intérprete simple (por ejemplo, el Intel MCS BASIC-52) que sólo permita
utilizar estructuras de datos planas como las matrices pero no manejar
registros. En tal caso no es posible utilizar la estructura de datos
anteriormente
descrita.
Para
estas
situaciones
puede
utilizarse,
la
estructura de datos de la Figura 2.4 ya que sólo emplea matrices de números
reales o enteros.
42
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
Figura 2.4. Otra posible estructura de datos para la BC
La estructura se basa en considerar tantas matrices como antecedentes,
consecuentes y puntos de definición utilizados en los conjuntos difusos. La
Figura 2.4 muestra un ejemplo para conjuntos difusos trapezoidales. La BD
está almacenada en las matrices de números reales X0, X1, X2 y X3. Cada
celda de estas matrices contiene la información relativa a su correspondiente
punto de definición. En Figura 2.4 han sido marcados con la leyenda ai, fsj, xk
correspondiente a la información del antecedente i (i toma valores desde 1
hasta 2 si las reglas tienen de dos antecedentes), conjunto difuso j (j toma
valores desde 1 hasta el número total de diferentes conjuntos difusos
definidos para los antecedentes y consecuente), y obviamente al punto de
definición k del conjunto difuso. La dimensión de estas matrices es el número
total de puntos de definición, lo cual es fácil de calcular como el producto
entre el número de reglas y la suma de los antecedentes y consecuentes.
La BR se almacena en las matrices A1, A2 y C. La dimensión de estas
matrices es el número de reglas de la BR. Las reglas aluden a los conjuntos
difusos que se encuentran almacenados en la BD (representados mediante
flechas en la Figura 2.4). Así pues, el número entero almacenado en cada
Implementaciones Software de SBRDs: Estructuras de Datos
43
celda de estas matrices apunta a un conjunto difuso en las matrices utilizadas
para almacenar la BD, que son X0, X1, X2 y X3.
Por ejemplo, supóngase una BR con siete reglas de dos antecedentes y un
solo consecuente. La partición difusa de los antecedentes tiene 10 y 2
conjuntos difusos respectivamente, mientras que la partición del consecuente
tiene 5 conjuntos difusos. Los conjuntos difusos considerados en la BD son
trapezoidales (cuatro puntos de definición). Entonces, el código de la
declaración de la matriz para el Intel MCS BASIC-52 será:
100
110
120
130
140
150
160
170
180
REM Base de Reglas con 7 reglas.
DIM A1(7)
DIM A2(7)
DIM C(7)
REM Base de Datos con 10+3+5=18 conjuntos difusos.
DIM X0(18)
DIM X1(18)
DIM X2(18)
DIM X3(18)
El resultado es una estructura muy fácil de utilizar. Por ejemplo, si
necesitamos referenciar el segundo punto de definición del consecuente de la
regla i, utilizaremos X1(C(i)).
Esta estructura puede ser fácilmente implementada también en lenguaje
ensamblador en el mapa de memoria direccionado por un microcontrolador.
2.2.2 Estructuras de Datos para el Sistema de Inferencia
El proceso de inferencia precisa de dos estructuras de datos:
1. Un Vector de grados de emparejamiento: Se trata de una lista de números
reales que temporalmente almacenará el grado de emparejamiento de cada
regla de la BC. Su tamaño es conocido de antemano y constante igual al
número de reglas de la base por lo que se puede reservar memoria para él
previamente. A continuación se muestra el código de la declaración del
Vector de grados de emparejamiento para el Intel MCS BASIC-52:
190 DIM H(7)
suponiendo 7 reglas en la BC.
2. Vectores de consecuentes: Estas matrices almacenarán el resultado final del
proceso de inferencia y serán la entrada del Interfaz de Defuzzificación. La
estructura de datos que se emplee para ellos dependerá del tipo de
implementación software del SBRD:
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
44
•
Cuando se considere el Método Exacto, debe utilizarse una lista de
puntos de descripción por cada conjunto difuso inferido a partir de
cada regla. Los puntos tienen dos coordenadas, es decir, dos números
reales. La longitud de las listas es variable por lo que deben alojarse
necesariamente en memoria dinámica.
•
Cuando se considere el Método Aproximado, se utilizarán N (igual al
número de reglas de la BC) listas o matrices de puntos. La longitud
de estas matrices es fija e igual al número de puntos de la
discretización.
Cuando se utilicen métodos de defuzzificación del Modo B – FITA en los
SBRDs Mono-operador, el Sistema de Inferencia y el Interfaz de
Defuzzificación podrán estar agrupados en un solo algoritmo por lo que no
será necesario utilizar Vectores de consecuentes. Se volverá a tratar este
tema en las siguientes secciones.
2.3 Implementaciones
Algoritmos
Software
de
SBRDs:
En esta sección mostraremos los algoritmos que permiten poner en práctica el
funcionamiento de los diferentes componentes de un SBRD: Interfaz de
Fuzzificación, Sistema de Inferencia e Interfaz de Defuzzificación, haciendo
hincapié en las diferencias entre SBRDs Mono-operador y Multi-operador.
2.3.1 Interfaz de Fuzzificación
La forma más simple y sencilla de codificar el Interfaz de Fuzzificación en
SBRDs es utilizando la fuzzificación puntual. La fuzzificación puntual no requiere
ninguna operación porque es precisamente en los valores discretos de las variables
de entrada donde los conjuntos difusos valen 1, siendo 0 en el resto. Esto es, los
valores de las variables de entrada directamente representan los conjuntos difusos
puntuales.
1, si x = x0
0, en otro caso
A’ (x) =
.
Implementaciones Software de SBRDs: Algoritmos
45
2.3.2 Sistema de Inferencia
El cálculo del grado de emparejamiento se lleva a cabo recorriendo cada una de
las reglas de la BC y calculando el punto de intersección hi entre el conjunto difuso
A’ (obtenido a partir de la entrada xi) y el conjunto difuso del antecedente de la
regla. Si las reglas tienen más de un antecedente deben calcularse todos los puntos
de intersección, el de cada entrada con su correspondiente antecedente de la regla,
obteniéndose así tantos valores hij como antecedentes.
Figura 2.5. Calculando el grado de emparejamiento
Para calcular el grado de emparejamiento deben considerarse las diferentes
zonas del conjunto difuso. Por ejemplo, en la Figura 2.5 deben considerarse las
siguientes cinco zonas posibles junto con sus expresiones de altura
correspondientes:
I. ej’ ≤ x0 : hij =0,
II. x0 < ej ≤ x1 : hij =
ej − x 0
,
x 1 − x0
III. x1 < ej ≤ x2 : hij =1,
IV. x2 < ej ≤ x3 : hij =
ej − x 3
,
x 2 − x3
V. x3 < ej’ : hij = 0,
donde ej es el valor actual de la variable de entrada xj.
Una vez realizado ésto, debe aplicarse el conectivo u operador de conjunción
para obtener el i-ésimo valor del grado de emparejamiento para la regla i-ésima Ri,
hi, con i=1 hasta N, siendo N el número de reglas de la BC. En la Figura 2.6 puede
apreciarse gráficamentela aplicación de la t-norma del mínimo resultando hi = Min
(hi1,hi2).
46
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
Figura 2.6. El mínimo como conectivo Y
Como ya se ha dicho, los valores hi deben almacenarse en el Vector de grados de
emparejamiento implementado en una matriz o lista de números reales de tamaño
N. A continuación se muestra a modo de ejemplo, el código para el Intel MCS
BASIC-52 que calcula el Vector de grados de emparejamiento, H. Se utilizan las
estructuras de datos para la BC y Sistema de Inferencia introducidas en las
secciones anteriores, siete reglas, dos antecedentes y conjuntos difusos
trapezoidales. El conectivo Y aplicado es la t-norma del mínimo:
260 FOR i=1 TO 7
270 REM Antecedente 1
280
IF e1<=X0(A1(i)) THEN 290 ELSE 300
290
min=0
300
IF e1>X0(A1(i)) AND e1<=X1(A1(i)) THEN 310 ELSE 320
310
min=(e1-X0(A1(i)))/(X1(A1(i))-X0(A1(i)))
320
IF e1>X1(A1(i)) AND e1<=X2(A1(i)) THEN 330 ELSE 340
330
min=1
340
IF e1>X2(A1(i)) AND e1<=X3(A1(i)) THEN 350 ELSE 360
350
min=(e1-X3(A1(i)))/(X2(A1(i))-X3(A1(i)))
360
IF e1<X3(A1(i)) THEN 370 ELSE 380
370
min=0
380
H(i)=min
390 REM Antecedente 2
400
IF e2<=X0(A2(i)) THEN 410 ELSE 420
410
min=0
420
IF e2>X0(A2(i)) AND e2<=X1(A2(i)) THEN 430 ELSE 440
430
min=(e2-X0(A2(i)))/(X1(A2(i))-X0(A2(i)))
440
IF e2>X1(A2(i)) AND e2<=X2(A2(i)) THEN 450 ELSE 460
450
min=1
460
IF e2>X2(A2(i)) AND e2<=X3(A2(i)) THEN 470 ELSE 480
470
min=(e2-X3(A2(i)))/(X2(A2(i))-X3(A2(i)))
480
IF e2<X3(A2(i)) THEN 490 ELSE 500
490
min=0
500 IF min<H(i) THEN H(i)=min
510 NEXT i
El siguiente paso es obtener el conjunto difuso inferido por cada regla utilizando
el consecuente y el grado de emparejamiento asociados a cada una. El operador de
implicación elegido producirá un conjunto difuso inferido con una forma concreta
Implementaciones Software de SBRDs: Algoritmos
47
definida por una expresión paramétrica. En el Apéndice I de la memoria se
muestra gráficamente estos conjuntos difusos inferidos para un amplio conjunto de
operadores de implicación. Normalmente, todos ellos deben ser almacenados para
llevar a cabo la defuzzificación. En situaciones concretas no es necesario
almacenarlos porque el Interfaz de Defuzzificación puede actuar al mismo tiempo
que el Sistema de Inferencia, como se verá más adelante.
Los conjuntos difusos inferidos podrían describirse con un número variable de
puntos, generalmente seis u ocho, de la misma forma que los conjuntos difusos de
los antecedentes y consecuentes se describen en la BC, añadiendo un valor
adicional a cada uno de ellos para la altura (ya que no tiene porqué ser 1 como en el
caso de los conjuntos difusos existentes en las reglas difusas de la BC). Así pues, la
estructura de datos para estos conjuntos difusos será una matriz o lista de puntos
llamada Vector de consecuente como se introdujo en la Sección 2.2.2. Por ejemplo,
si utilizamos la t-norma del mínimo como operador de implicación, los conjuntos
difusos inferidos serán como los presentados en la Figura 2.7. Este gráfico es el
resultado de aplicar la expresión del operador de implicación mínimo
(I(x,y)=Min(x,y)) sobre el grado de emparejamiento h y el conjunto difuso
consecuente de la regla.
Figura 2.7. Operador de implicación del mínimo
En el caso del operador de implicación del mínimo, como en otros casos, la
información sobre la altura de algunos de sus puntos coincide con el grado de
emparejamiento. Los puntos x0 y x3 son los mismos que en el consecuente de la
regla. Los otros dos, x4 y x5 , pueden calcularse como la intersección de las rectas
que pasan por x0 y x1 y la que pasa por x2 y x3 con la horizontal de altura h,
respectivamente. Las expresiones son:
x4 = x0 + ( x1 – x0 ) ⋅ hi,
x5 = x3 – ( x3 – x2 ) ⋅ hi.
Estas expresiones pueden ser directamente incorporadas al código fuente de un
SBRD con su correspondiente altura, h. Del mismo modo, cualquier otro operador
de implicación podría ser usado obteniendo los puntos de definición e
implementando la expresión que describa su cálculo.
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
48
A continuación vamos a realizar una serie de comentarios en relación con el tipo
de implementación software del SBRD:
•
Método Exacto: Se requiere la representación gráfica del conjunto difuso
inferido. A partir de ahí, obtenemos los puntos de definición del conjunto
difuso. Estos puntos serán almacenados en la estructura de datos para el
Sistema de Inferencia citada en la Sección 2.2.2, es decir, una lista de puntos
para cada conjunto difuso inferido procedente de las reglas. Por ejemplo,
observando la Figura 2.7, los puntos de definición que serán almacenados
serían:
( x0’ = x0 , 0 ),
( x1’ = x4 , h ),
( x2’ = x5 , h ),
( x3’ = x3 , 0 ),
donde x4 y x5 tienen que ser calculados con la expresión previamente
mostrada, y x0 y x3 son los puntos de definición para el consecuente de la
regla. La ventaja de este método desde el punto de vista del Sistema de
Inferencia es el consumo mínimo de memoria y la eficiencia del proceso de
inferencia. La desventaja es que requiere un estudio previo del operador de
implicación para determinar la representación gráfica y las expresiones de
los puntos. Si se desea añadir a la implementación un grupo importante de
operadores de implicación, el proceso de diseño será muy duro y susceptible
de cometer errores.
•
Método Aproximado: El universo del consecuente se divide en un conjunto
fijo de puntos estableciendo una discretización. La expresión matemática del
operador de implicación será directamente incorporada en el código, de modo
que el conjunto difuso inferido será calculado con la expresión del operador
de implicación, los puntos de la discretización y el grado de emparejamiento.
Una posible discretización para el operador de implicación de Goguen se
muestra en la Figura 2.8. La expresión del operador de implicación de
Goguen es:
1, si y ≤ x
IGoguen (x, y) =
,
y, en otro caso
y por tanto la función de discretización f que la aproxima es:
fi = IGoguen (h , µB( i )),
donde B es el consecuente de la regla e i toma un conjunto finito de valores
equidistantes en el dominio de la variable.
Implementaciones Software de SBRDs: Algoritmos
49
Figura 2.8. Una aproximación del
operador de implicación de Goguen
La ventaja de este método desde el punto de vista del Sistema de Inferencia
es que no necesita un duro estudio previo de los operadores de implicación.
Pero las desventajas son la baja eficiencia del controlador, el hecho de que la
precisión dependa de la granularidad de la discretización, que es
inversamente proporcional a la velocidad, y la gran cantidad de memoria que
emplea, como se comentó en la descripción de las estructuras de datos.
2.3.3 Interfaz de Defuzzificación
La implementación del Interfaz de Defuzzificación depende muy directamente
del modo de trabajo del método de defuzzificación elegido.
Modo A – FATI:
Como se ha dicho anteriormente, el Interfaz de Defuzzificación que trabaja en
Modo A – FATI realiza en primer lugar la agregación de los conjuntos difusos
individuales inferidos, Bi’, mediante el operador también, con objeto de obtener el
conjunto difuso final de salida B’. Los operadores de agregación que modelan el
conectivo también son típicamente el mínimo o el máximo. Las Figuras 2.9 y 2.10
muestran gráficamente el comportamiento del conectivo también modelado con los
operadores máximo y mínimo, respectivamente.
Figura 2.9. Agregación con máximo
Figura 2.10. Agregación con mínimo
En este caso, el Método Exacto conlleva un grado de complejidad alto ya que los
operadores de agregación máximo y mínimo deben actuar con los conjuntos difusos
descritos como segmentos de línea recta. La estructura de datos para manejar el
conjunto difuso inferido es una lista de puntos, por lo que debe crearse una nueva
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
50
lista de puntos auxiliar en el proceso de agregación. El método típico consiste en
construir una función que agregue los conjuntos difusos de dos en dos, esto es,
obteniendo una nueva lista de puntos que representen el conjunto difuso agregado
a partir de otros dos conjuntos iniciales. Ejecutando esta función tantas veces
menos uno como conjuntos difusos individuales hayan sido inferidos, se obtendrá el
conjunto difuso agregado final. El algoritmo de agregación determina las posiciones
relativas de los segmentos que integran los conjuntos de entrada y calcula, si
existen, los puntos de cruce que serán añadidos a la lista de salida. En muchos
casos puede ser interesante diseñar una función de simplificación para estudiar y
eliminar los puntos innecesarios añadidos a la lista, lo cual mejorará el
rendimiento de la función de agregación.
La agregación de los conjuntos difusos inferidos en el Método Aproximado
cuando se trabaja en Modo A – FATI es de sencilla implementación con un
algoritmo que recorra todos los puntos de la discretización de los conjuntos difusos
inferidos calculando el máximo o el mínimo de ellos. La misma operación puede ser
utilizada para modelar cualquier otro conectivo también. Las Figuras 2.11 y 2.12
presentan gráficamente la agregación con máximo y con mínimo.
Figura 2.11. Agregación aproximada
con máximo
Figura 2.12. Agregación aproximada
con mínimo
Una vez realizada la agregación, para efectuar la defuzzificación del conjunto
difuso final B’, podrían utilizarse los siguientes métodos:
•
La Media de los Máximos Valores (usualmente llamado MOM):
y0 =
y1 + y2
,
2
donde y1 = Min {z/ µB’ (z) = Max µB’ (y)} and y2 = Max {z/ µB’ (z) = Max µB’ (y)}.
Implementaciones Software de SBRDs: Algoritmos
51
Figura 2.13. Media de los Máximos Valores
con el conectivo también máximo
La Figura 2.13 muestra gráficamente el método de defuzzificación
Media de los Máximos Valores del conjunto difuso B’, resultado de la
agregación de los conjuntos difusos individuales B’i mediante el máximo.
En el Método Exacto, la salida resultante de la Media de los Máximos
Valores se calcula fácilmente teniendo en cuenta que se pueden presentar
siguientes posibilidades:
•
El Punto de Máximo Valor es único: este punto será el extremo de un
segmento y puede localizarse comparando simplemente los extremos de
los segmentos que componen el conjunto difuso agregado.
•
El valor máximo se alcanza en un conjunto de puntos numerable: de
modo similar, este conjunto de puntos serán los extremos de segmentos.
En este caso, si no hay otros puntos individuales, se utilizarán los
extremos para calcular el punto medio.
•
El valor máximo se alcanza en un conjunto de puntos no numerable: es
decir, un segmento horizontal. El resultado final se calcula como la
media de los valores de abcisa más bajo y más alto (Figura 2.13).
En el Método Aproximado, la Media de los Máximos Valores se calcula
recorriendo la discretización y reteniendo los puntos de máxima altura. Si la
máxima altura no es única, entonces se calcula la media de los puntos más
bajo y más alto.
•
El Centro de Gravedad, cuya expresión exacta es:
W =
∫V y ⋅ì B' (y) dy .
∫V ì B' (y) dy
La Figura 2.14 muestra gráficamente el resultado del método de
defuzzificación Centro de Gravedad del conjunto difuso B’, resultado de la
52
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
agregación de los conjuntos difusos individuales B’i con el mínimo como
conectivo también.
Figura 2.14. Centro de gravedad
con el conectivo también mínimo
Usualmente, la forma del conjunto difuso inferido no es tan simple como la
de la Figura 2.14. En el Método Exacto, las figuras geométricas complejas
deben ser descompuestas en otras más simples, considerando una figura
simple la que corresponde a cada tramo rectilíneo de la original. El
numerador de la expresión del Centro de Gravedad se calcula como la suma
de los diferentes cálculos desarrollados sobre estas figuras más simples. El
denominador se calcula de un modo similar y finalmente se realiza la
división. Estas son las expresiones para las figuras simples en los dos casos
posibles que se pueden presentar:
• Caso 1, representado en la Figura 2.15.
Figura 2.15. Caso 1
Numerador ( ∫ u ⋅ µ A ( u )du ):
V
xj
x 22 − x12 x23 − x13
x
⋅
f
(
x
)
=
c
⋅
+
.
∫xi
2
3
Denominador (áreas ∫ µ A ( u )du ):
V
xj
x 22 − x12
f
(
x
)
=
c
⋅
(
x
−
x
)
+
a
⋅
.
2
1
∫xi
2
Implementaciones Software de SBRDs: Algoritmos
siendo a :
y2 − y1
x2 − x1
,yc:
53
x 2 ⋅ y1 − x1 ⋅ y2
x 2 − x1
.
• Caso 2, representado en la Figura 2.16.
Figura 2.16. Caso 2
Numerador ( ∫ u ⋅ µ A ( u )du ):
V
2
2
xj
2 x 2 − x1
⋅
=
y
⋅
.
x
f
(
x
)
1
∫xi
2
Denominador (áreas ∫ µ A ( u )du ):
V
xj
∫xi f ( x ) = y1 ⋅ ( x2 − x1 ) .
2
En el Método Aproximado, el Centro de Gravedad se obtendrá fácilmente
porque las integrales se calculan como sumas en el caso discreto, de este
modo:
W =
∑ yj ⋅ µB' (yj) dy
j =1..N
∑ µ B' (yj) dy
.
j =1..N
Modo B – FITA:
Anteriormente se indicó que este modo evita el cálculo, frecuentemente complejo
computacionalmente, del conjunto difuso final B’ considerando la contribución de
salida de cada regla individualmente. De tal forma se obtiene la acción discreta
final por medio del cálculo (media, suma ponderada o selección de uno de ellos) de
uno de los valores característicos asociados a cada una de ellas como se detalló en el
Capítulo 1, Sección 1.2.4.
Debe considerarse que los SBRDs Mono-operador, como los Multi-operador,
pueden implementarse tanto mediante el Método Exacto como con el Aproximado.
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
54
En cualquier caso, los SBRDs Mono-operador se diseñan para aplicaciones
específicas y se ejecutan sobre computadoras empotradas por lo que su
implementación debe tender a compactar los algoritmos de inferencia y
defuzzificación. Esto reduce los recursos necesarios y produce algoritmos
computacionalmente más eficientes. Si se desea no almacenar cada conjunto difuso
inferido se debe defuzzificar y disponer de su valor real antes de calcular el
siguiente conjunto difuso inferido. Finalmente, sólo se habrá de realizar el cálculo
simple que proponga el método elegido.
No es posible unificar los algoritmos en un SBRD Mono-operador cuando se
trabaja en Modo A – FATI. Por este motivo los SBRDs Mono-operador para
aplicaciones empotradas deben ser implementados utilizando la defuzzificación en
el Modo B – FITA.
Continuando con el ejemplo real de la implementación de un SBRD en el
lenguaje Intel MCS BASIC-52, se muestra a continuación la implementación
unificada del Sistema de Inferencia basado en el operador de implicación producto
lógico (t-norma del mínimo), con el Interfaz de Defuzzificación basado en el Punto
de Máximo Valor ponderado por el grado de emparejamiento. La expresión es:
x i + x2 i
∑ hi ⋅ 1 2
y0 = i
∑ hi
i
El código en BASIC-52 es:
520
530
540
550
560
570
580
sum1=0
sum2=0
FOR i=1 TO 7
sum1=sum1+(H(i)*(X1(C(i))+X2(C(i)))/2)
sum2=sum2+H(i)
NEXT i
y=sum1/sum2
siendo y el valor discreto de la salida.
.
Estudio Comparativo del Método Exacto y Aproximado
55
2.4 Estudio Comparativo del Método Exacto y
Aproximado
En esta sección se compara el comportamiento de los dos métodos presentados
para la implementación de SBRDs Multi-operador con objeto de analizar la pérdida
de precisión resultante del empleo del Método Aproximado.
Para ello, se utilizan dos aplicaciones de modelado difuso que se describen
detalladamente en el Apéndice II de la presente memoria: el modelado difuso de la
relación funcional sencilla Y=X y el de una superficie tridimensional F1.
Estas dos aplicaciones serán utilizadas en un grupo de SBRDs construidos en
base a la combinación de diez operadores de implicación (I2 (Dubois-Prade), I5
(Goguen), I6 (Lukasiewicz), I9, I10 (P.Lógico), I12 (P.Algebraico), I16, I21, I26 e I33) y
ocho métodos de defuzzificación, citados en la Tabla 2.1. Estos operadores de
implicación y métodos de defuzzificación se detallan en el Apéndice I de la presente
memoria.
D1
D2
D10
D11
D24
D30
D31
D33
MOM con agregación MAR
CG con agregación MAR
MOM con agregación FLR
CG con agregación FLR
PMV ponderado por el grado de emparejamiento
PMV del difuso de mayor grado de emparejamiento
Media de los Máximos Valores
Centro de Sumas
Tabla 2.1. Métodos de defuzzificación empleados
en la experimentación de este capítulo
Para medir el comportamiento de los SBRDs se ha utilizado una medida de
Error Cuadrático Medio (ECM) definida de la siguiente forma:
ECM (S [i, j] ) =
1
2
N
∑ ( yk - S [i, j] (xk ) ) 2
k=1
N
,
donde S[i,j] hace referencia al SBRD para el cual el Sistema de Inferencia utiliza el
operador de implicación Ii y el Interfaz de Defuzzificación utiliza el método Dj. Esta
medida considera un conjunto de datos de evaluación formado por N vectores de
datos numéricos Zk=( xk, yk ), k=1,...,N, siendo xk los valores de las variables de
entrada e yk los correspondientes valores asociados a las variables de salida.
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
56
El operador de conjunción o combinación de los antecedentes utilizado para los
experimentos con la superficie tridimensional es siempre la t-norma del mínimo
por ser el más frecuentemente empleado en la literatura especializada.
Con el objeto de observar la dependencia de la granularidad de la discretización
en el universo de la variable del consecuente cuando se trabaja con el Método
Aproximado, consideraremos dos particiones, una de 25 puntos y otra de 100
puntos.
En el Apéndice A del presente capítulo se recopilan las tablas de resultados
obtenidos. Las Tablas 2.4, 2.5 y 2.6 muestran los valores para la aplicación Y=X con
el Método Exacto y el Aproximado con 25 y 100 puntos en la discretización del
intervalo, respectivamente. Las Tablas 2.7, 2.8 y 2.9 hacen lo propio para el
experimento del modelado difuso de la superficie tridimensional F1.
Varios operadores de implicación (I9, I21, e I26) no se pueden emplear en
combinación con los métodos de Modo A – FATI ya que las discontinuidades que
presentan en sus funciones de pertenencia del consecuente inferido no pueden
agregarse. En estos casos, las tablas muestran la marca “ * ”. Por tanto, con estos
operadores sólo se utiliza el Modo B – FITA el cual, como se ha visto, no agrega los
conjuntos difusos inferidos.
Las Tablas 2.2, y 2.3 muestran un resumen de los resultados de las Tablas 2.4 a
la 2.9 del Apéndice A del presente capítulo.
Método Exacto
D2
D24
I5
0.0962
0.0498
I33
0.0660
0.0498
Método
Aproximado
N=100
I5
I33
0.1079 2.0120
0.0921 0.2788
Tabla 2.2. Resumen de los resultados
obtenidos para la aplicación Y=X
Método Exacto
D1
D31
Método
Aproximado
N=25
I5
I33
0.2019 2.9883
0.0623 0.2970
I2
0.3494
4.7566
I33
3.5258
0.3481
Método
Aproximado
N=25
I2
I33
0.3621 4.2172
4.7566 0.9301
Método
Aproximado
N=100
I2
I33
0.3504 0.3613
4.7543 0.7621
Tabla 2.3. Resumen de los resultados obtenidos
para la aplicación de la superficie tridimensional F1
A continuación se realiza un análisis de los resultados obtenidos en la
comparación del método de implementación exacto y aproximado con granularidad
de 25 y 100 puntos:
•
Los valores obtenidos en la medida de ECM son, en general, muy similares.
Claramente las combinaciones de operadores de implicación y métodos de
Conclusiones
57
defuzzificación que presentan buenos resultados con el Método Exacto
también ofrecen buenos resultados con el Método Aproximado. Por tanto, es
más importante la elección de los operadores de implicación y métodos de
defuzzificación que la elección del método de implementación.
•
El Método Exacto siempre ofrece los resultados precisos correspondientes a
los operadores de conjunción y métodos de defuzzificación empleados. En
ocasiones, observando las tablas puede apreciarse, un menor error para
algún caso de la implementación basada en el Método Aproximado. Este
hecho que aparentemente puede resultar incoherente, no lo es tanto: el
motivo es el efecto de suavizamiento que realiza la implementación por el
Método Aproximado sobre las funciones de pertenencia de los conjuntos
difusos inferidos. Dicho suavizamiento constituye una pérdida de fidelidad,
que en algunos casas ocasiona que el SBRD resultante obtenga mejor
comportamiento que la propia implementación exacta con el operador que se
pretendía utilizar. Por tanto, esta mejora en el comportamiento no
corresponde a un verdadero buen comportamiento.
•
Algunas combinaciones de operadores difusos muestran diferencias
significativas entre su implementación por el Método Exacto y el Método
Aproximado, por ejemplo I26 e I33. El origen de esta disparidad puede
encontrarse estudiando la forma de los conjuntos difusos inferidos por
ambos operadores (el Apéndice I de la presente memoria muestra las
representaciones gráficas de los operadores de implicación) y su
combinación con determinados métodos de defuzzificación. Por ejemplo, el
operador de implicación I33, cuya representación se muestra en la Figura
2.17, tiene dos puntos distanciados a la máxima altura, x4 y x5. Esta
situación introduce un importante error en el Método Aproximado cuando se
defuzzifica con métodos de defuzzificación que utilicen el Punto de Máximo
Valor porque el algoritmo aproximado sólo detecta un punto máximo: el otro
máximo no es considerado a la misma altura exacta ya que todos los valores
de altura son aproximados. Como se comentó previamente con respecto a la
implementación de métodos que utilizan el Punto de Máximo Valor, cuando
aparece más de un punto a la máxima altura se actúa calculando el
promedio de ellos. Esto lleva a que el Método Exacto sitúe la salida en el
centro del conjunto difuso inferido mientras que el Método Aproximado lo
sitúa en uno de los extremos que puede estar sensiblemente alejado de la
solución. El efecto se acentúa especialmente en I33 cuando los valores del
grado de emparejamiento son inferiores a ½ porque la distancia aumenta
entre el máximo valor mal detectado en el extremo y el centro del conjunto
difuso.
58
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
cuando h ≥ ½:
cuando h ≤ ½:
Figura 2.17. Operador de implicación I33
2.5 Conclusiones
En este capítulo se ha expuesto una metodología para llevar a cabo la
codificación de SBRDs para el modelado y control difuso, la cual permite realizar
posteriores estudios sobre los operadores difusos y métodos de defuzzificación. Se
han analizado las diferentes opciones de diseño para implementar SBRDs
observando su flexibilidad, precisión y eficiencia.
Se ha repasado la posibilidad de utilizar dos métodos válidos para llevar a cabo
la implementación de SBRDs: el Método Exacto y el Método Aproximado.
En líneas generales, cuando se diseña un SBRD específico, se debe preferir una
implementación sencilla. Se ha visto que la elección de los operadores de
implicación y métodos de defuzzificación puede aumentar fuertemente la
complejidad de los algoritmos. Si se necesita un SBRD rápido deben tenerse en
cuenta las consideraciones de eficiencia, las cuales condicionan también
enérgicamente la elección de los operadores para el Sistema de Inferencia y los
métodos de defuzzificación, así como métodos de implementación. Generalmente se
recurre al Método Exacto salvo que se precise emplear un operador de implicación o
método de defuzzificación que, por su complejidad, lo impida.
En el ámbito del estudio de los operadores de implicación, los SBRDs Multioperador se implementan fundamentalmente con el Método Exacto cuya principal
virtud para estos cometidos es la fiabilidad. En principio, aunque el Método
Aproximado presenta menos problemas para su codificación, precisa de un análisis
sobre la posible imprecisión que pueden introducir las diferentes combinaciones de
operadores. Esto reduce las ventajas iniciales y se suma como inconveniente
también a su notable lentitud. En cualquier caso, en ocasiones puede ser casi
imprescindible el uso del Método Aproximado por motivo de la complejidad de
Conclusiones
59
determinados operadores de implicación y métodos de defuzzificación, sobre todo
cuando se pretende defuzzificar los conjuntos difusos resultantes. Por ejemplo,
como se verá en el Capítulo 5, algunos métodos de defuzzificación son tan complejos
que los propios autores que los proponen lo hacen presentando directamente su
expresión para ser implementado con el Método Aproximado.
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
60
Apéndice A: Resultados Parciales
D1
D2
D10
D11
D24
D30
D31
D33
I2
0.1372
1.2859
4.3750
4.3750
0.2220
0.2622
2.2874
3.8089
D1
D2
D10
D11
D24
D30
D31
D33
I2
0.1995
1.3792
4.3738
4.3738
0.2868
0.3936
2.3035
3.8044
I5
0.0000
0.0962
4.3750
4.3750
0.0498
0.2062
2.0684
3.4280
I6
0.0000
1.6443
4.3750
4.3750
0.0498
0.2062
2.0684
3.9436
I9
*
*
*
*
0.0498
0.2062
2.0684
1.4868
I10
0.1616
0.1860
0.1612
0.3768
0.0498
0.2062
0.2141
0.3030
I12
1.2561
0.9241
0.8689
0.8844
0.0207
0.2896
0.1636
0.2318
I16
0.1616
0.1860
0.1612
0.3768
0.0498
0.2062
0.2141
0.3030
I21
*
*
*
*
0.0498
0.2062
0.2141
0.2530
I26
*
*
*
*
0.0207
0.2896
0.1636
0.1155
I33
0.6585
0.6604
0.8197
0.9278
0.0498
0.2062
0.2141
0.2085
I26
*
*
*
*
0.6811
0.5856
1.3613
1.0861
I33
0.3134
2.9883
0.4582
0.3103
0.2970
0.5179
0.8358
0.2242
Tabla 2.4. Método Exacto para la aplicación X=Y
I5
0.0191
0.2019
4.3738
4.3738
0.0623
0.3207
2.0432
3.4061
I6
0.0639
1.6510
4.3738
4.3738
0.0623
0.3207
2.0085
3.9292
I9
*
*
*
*
0.0670
0.3910
1.9196
2.7448
I10
0.2068
1.5532
0.2057
0.3448
0.0623
0.3207
0.2392
0.2873
I12
0.6497
3.8708
0.3815
0.2200
0.0316
0.3807
0.1793
0.2106
I16
0.2068
1.5532
0.2057
0.3448
0.0623
0.3207
0.2392
0.2873
I21
*
*
*
*
0.1019
0.3497
0.3122
0.1891
Tabla 2.5. Método Aproximado con 25 puntos par la aplicación X=Y
D1
D2
D10
D11
D24
D30
D31
D33
I2
0.2054
1.3884
4.3738
4.3738
0.2907
0.5875
2.2578
3.7940
D1
D2
D10
D11
D24
D30
D31
D33
I2
0.3494
3.1681
5.4630
5.4630
0.1338
0.3875
4.7566
5.4067
I5
0.0231
0.1079
4.3738
4.3738
0.0921
0.5176
2.0410
3.4105
I6
0.0877
1.7058
4.3738
4.3738
0.0921
0.5176
2.0046
3.9311
I9
*
*
*
*
0.0619
0.5955
1.8770
2.7063
I10
0.1933
1.0897
0.3227
0.4004
0.0921
0.5176
0.2506
0.3256
I12
0.6834
1.1857
0.4015
0.2787
0.0619
0.5955
0.1993
0.2575
I16
0.1933
1.0897
0.3227
0.4004
0.0921
0.5176
0.2506
0.3256
I21
*
*
*
*
0.0921
0.5176
0.2506
0.2186
I26
*
*
*
*
0.7085
0.7820
1.3786
1.1086
I33
0.3223
2.0120
0.6272
0.3360
0.2788
0.7369
0.7277
0.2483
Tabla 2.6. Método Aproximado con 100 puntos para la aplicación X=Y
I5
1.9217
1.9340
5.4630
5.4630
0.0661
0.3987
4.7267
5.3057
I6
0.2943
3.5946
5.4630
5.4630
0.0661
0.3987
4.7267
5.4200
I9
*
*
*
*
0.0661
0.3987
4.7267
5.0598
I10
1.9529
1.9551
0.3987
0.2608
0.0661
0.3987
0.3481
0.1872
I12
2.0073
1.9630
0.4569
0.2020
0.0445
0.4569
0.3363
0.1454
I16
1.9529
1.9551
0.3987
0.2608
0.0661
0.3987
0.3481
0.1872
I21
*
*
*
*
0.0661
0.3987
0.3481
0.1580
Tabla 2.7. Método Exacto para la aplicación del
modelado difuso de la superficie tridimensional F1
I26
*
*
*
*
0.0445
0.4569
0.3363
0.1138
I33
3.5258
3.5251
0.3987
0.1996
0.0661
0.3987
0.3481
0.1770
Apéndice A: Resultados Parciales
D1
D2
D10
D11
D24
D30
D31
D33
I2
0.3621
3.1239
5.4630
5.4630
0.1338
0.3875
4.7566
5.4059
D1
D2
D10
D11
D24
D30
D31
D33
I2
0.3504
3.1679
5.4630
5.4630
0.1286
0.3860
4.7543
5.4069
I5
1.9176
1.9341
5.4630
5.4630
0.0581
0.4263
4.7344
5.3132
I6
0.3172
3.5336
5.4630
5.4630
0.0579
0.4263
4.7165
5.4185
61
I9
*
*
*
*
0.0445
0.4569
4.6791
5.2561
I10
1.9500
5.2868
0.4263
0.1935
0.0579
0.4263
0.3377
0.1381
I12
1.9772
5.4630
0.4569
0.1388
0.0445
0.4569
0.3363
0.0971
I16
1.9500
5.2868
0.4263
0.1935
0.0579
0.4263
0.3377
0.1381
I21
*
*
*
*
0.0579
0.4263
0.3377
0.1148
I26
*
*
*
*
1.4925
0.4263
3.1969
0.3990
I33
4.2172
5.4630
0.5919
0.1853
0.2420
0.5919
0.9301
0.1656
Tabla 2.8. Método Aproximado con 25 puntos para la
aplicación del modelado difuso de la superficie tridimensional F1
I5
1.9198
1.9333
5.4630
5.4630
0.0641
0.4025
4.7424
5.3115
I6
0.2978
3.5748
5.4630
5.4630
0.0638
0.4025
4.7245
5.4195
I9
*
*
*
*
0.0468
0.4612
4.6828
5.2546
I10
1.9520
3.0742
0.4025
0.2448
0.0638
0.4025
0.3450
0.1757
I12
2.0016
4.3197
0.4612
0.1847
0.0468
0.4612
0.3389
0.1321
I16
1.9520
3.0742
0.4025
0.2448
0.0638
0.4025
0.3450
0.1757
I21
*
*
*
*
0.0638
0.4025
0.3450
0.1352
I26
*
*
*
*
1.5210
0.4025
3.2231
0.3927
Tabla 2.9. Método Aproximado con 100 puntos para la
aplicación del modelado difuso de la superficie tridimensional F1
I33
3.6713
4.9558
0.5357
0.1961
0.2199
0.5357
0.7621
0.1749
62
Implementación de Sistemas Basados en Reglas Difusas para Modelado y Control Difuso
Capítulo 3
Análisis de la Integración de
Operadores de Conjunción,
Operadores de Implicación
y Métodos de Defuzzificación
La tarea de diseño del Sistema de Inferencia de un SBRD, en la que se centra el
estudio de esta memoria, comprende la selección de los operadores que intervienen
en el proceso de inferencia y de los métodos de defuzzificación. Con objeto de
estudiar estos operadores, en el Capítulo 2 se expusieron las diferentes opciones de
implementación de SBRDs, lo que nos dotó de las herramientas software necesarias
para realizar estudios prácticos sobre dichos sistemas con múltiples operadores
difusos y métodos de defuzzificación.
En el presente capítulo se va a disponer de un amplio grupo de operadores de
implicación los cuales han sido seleccionados por ser los más empleados en la
literatura especializada. Estos operadores de implicación pertenecen a las familias
clásicas, las cuales fueron introducidas en la Sección 1.2.3.2. Los SBRDs diseñados
en base a ellos serán evaluados aplicándolos a tres problemas de modelado difuso,
lo cual permitirá identificar qué operadores son los que mejores resultados ofrecen.
En cuanto a los métodos de defuzzificación considerados para el estudio
realizado en este capítulo, estos provienen también de los más empleados en los
trabajos de la literatura especializada a los que se ha añadido además un amplio
grupo de los que trabajan en Modo B – FITA.
64
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
3.1 Estudios Previos en el uso de Operadores de
Conjunción e Implicación, y Métodos de
Defuzzificación en el diseño de SBRDs
La expresión final de la RCI para los SBRDs mostrada en la Sección 1.2.3,
manifiesta su dependencia de los operadores de conjunción e implicación. En la
literatura especializada se proponen una extensa variedad de operadores que
pueden ser utilizados como operadores de implicación en el proceso de inferencia de
SBRDs para modelado y control difuso. Han sido muchos los autores que analizan
varios operadores de implicación tales como: las implicaciones introducidas a partir
de los sistemas de la lógica multivaluada [MZ82], las funciones de implicación
[TV85,MS89], t-normas [Miz89, GQ91a, GQ91b] y un amplio grupo de otros tipos
de operadores de implicación no pertenecientes a ninguna familia con propiedades
bien definidas [KKS85, CK89, CPK92]. Analizando estos trabajos es posible
concluir que la selección del mejor operador de implicación es uno de los principales
problemas en el diseño de SBRDs.
Varios estudios de la literatura especializada aportan información en la tarea de
selección de este operador. Mizumoto y Zimmerman [MZ82] introducen varios
operadores de implicación de los sistemas de lógica multivaluada y estudian su
comportamiento en el Modus Ponens Generalizado y en el Modus Tollens
Generalizado cuando las entradas al Sistema de Inferencia son conceptos difusos.
Posteriormente Mizumoto [Miz87] analiza la precisión de varios de estos
operadores de implicación en el control difuso de una planta. Kiszka y sus colegas
[KKS85] reúnen más de treinta operadores de implicación y estudian su precisión
en el control difuso de un motor de corriente continua. Cao y Kandel [CK89,
CPK92] definen una nueva metodología para la comparación y analizan el
comportamiento de los operadores empleados por Kiszka utilizándolos en el
modelado difuso de diferentes funciones matemáticas. Finalmente, Gupta y Qi
[GQ91b] estudian el comportamiento de varios operadores de implicación basados
en t-normas en el mismo problema que Mizumoto.
Varios de estos trabajos analizan también otras de las cinco decisiones de diseño
para definir el Sistema de Inferencia, descritas en la Sección 1.3.1. En [KKS85,
CQ89, CPQ92, LT91] se estudia la definición matemática del operador de
agregación también utilizando los operadores máximo y mínimo. En los dos
primeros trabajos se componen hasta 72 distintos procesos de inferencia utilizando
estos dos operadores de agregación y 36 operadores de implicación. Gupta y Qi
[GQ91b] utilizan distintas t-normas para el mismo propósito, así como para
representar el operador de conjunción y de las reglas de control. Finalmente, en
[HDR93, HT93, Hel93, JVB92, PYL92, RG93a] se presentan y estudian una amplia
gama de métodos de defuzzificación.
Selección de Operadores de Conjunción, Operadores de Implicación y Métodos de Defuzzificación
65
Cabe destacar que estos estudios previos citados sobre defuzzificación analizan
fundamentalmente los métodos de defuzzificación que trabajan en el llamado Modo
A – FATI, no existiendo estudios previos que traten en profundidad los métodos
que operan en el Modo B – FITA, que sí serán considerados en este capítulo.
3.2 Selección de Operadores de Conjunción,
Operadores de Implicación y Métodos de
Defuzzificación
Con objeto de investigar el comportamiento de distintas opciones de diseño de
SBRDs se plantea llevar a cabo una experimentación construyendo los distintos
SBRDs en base a la combinación de diferentes operadores de conjunción, distintos
operadores de implicación pertenecientes a las familias clásicas y también
diferentes métodos de defuzzificación.
A continuación se concretan los operadores de conjunción e implicación así como
los métodos de defuzzificación que serán utilizados para el cometido anteriormente
indicado. En primer lugar se tratará de los operadores para el Sistema de
Inferencia, es decir, los operadores de conjunción e implicación, y posteriormente de
los métodos para el Interfaz de Defuzzificación.
3.2.1 Operadores para el Sistema de Inferencia
Los operadores de conjunción más ampliamente utilizados son las t-normas, que
fueron descritas en la Sección 1.2.3.1. Por tal motivo en este trabajo se van a
utilizar también las cinco t-normas clásicas: T1 (producto lógico o t-norma del
mínimo), T2 (producto de Hamacher), T3 (producto algebraico), T4 (producto de
Einstein) y T5 (producto acotado o t-norma de Lukasiewicz). En el Apéndice A del
presente capítulo pueden consultarse las expresiones de estos operadores de
conjunción.
La t-norma del producto drástico no será utilizada como operador de conjunción
en esta memoria ya que en estudios previos se ha comprobado que los sistemas
diseñados utilizándola presentan mal comportamiento debido a que esta t-norma es
discontinua.
Con el objeto de estudiar una muestra significativa de los operadores de
implicación más habitualmente utilizados en la literatura especializada, se han
seleccionado un conjunto de catorce operadores que se relacionan en la Tabla 3.1.
66
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
Sus expresiones y las correspondientes representaciones gráficas de sus respectivos
consecuentes inferidos se encuentran en el Apéndice I.
I1
Diene
I2
Dubois-Prade
I3
Mizumoto
I4
Gödel
I5
Goguen
I6
Lukasiewicz
I7
Early-Zadeh
I8
Gaines
I10 P. Lógico (mínimo)
I11 P. Hamacher
I12 P. Algebraico
I13 P. Einstein
I14 P. Acotado (Lukasiewicz)
I15 P. Drástico
Tabla 3.1. Operadores de implicación
considerados en el presente capítulo
En este grupo de operadores se encuentran ocho operadores (I1 al I8), como
representantes de la familia de los operadores que extienden la implicación
booleana (introducidos en la Sección 1.2.3.2). De ellos seis son funciones de
implicación (I1 al I6).
Cabe destacar también que entre los operadores de implicación seleccionados se
encuentran, como representantes de la familia de operadores que extienden a la
conjunción booleana (introducidos en la Sección 1.2.3.2), las seis t-normas citadas
en la Sección 1.2.3.1 actuando en este caso como operadores de implicación (I11 al
I16).
3.2.2
Métodos de Defuzzificación
La selección de los métodos de defuzzificación empleados en el presente estudio
se detalla en las subsecciones siguientes atendiendo a su modo de trabajo cuyas dos
posibilidades, Modo A – FATI ó Modo B – FITA, se describieron en la Sección 1.2.4.
Métodos del Modo A – FATI
En la Sección 1.2.4.1 se citaron cuatro métodos de defuzzificación que trabajan
en el Modo A – FATI, los cuales van a ser empleados en el presente estudio y se
relacionan en la Tabla 3.2.
Selección de Operadores de Conjunción, Operadores de Implicación y Métodos de Defuzzificación
67
Métodos del Modo B – FITA
En la Sección 1.2.4.2 se presentó un amplio grupo de quince métodos de
defuzzificación clasificados en base a su construcción los cuales son empleados en el
presente capítulo y se relacionan en la Tabla 3.3. Sus expresiones pueden
consultarse en el Apéndice I de la presente memoria.
Adicionalmente se incluyen en el presente estudio también tres de los métodos
más ampliamente utilizados que trabajan en el Modo B – FITA: la Media de los
Máximos Valores, la Media del Mayor y del Menor Valor y el Centro de Sumas, los
cuales fueron igualmente presentados en la Sección 1.2.4.2 y se incluyen en la
Tabla 3.3. Sus expresiones pueden asimismo consultarse en el Apéndice I de la
presente memoria.
D1
D2
D10
D11
MOM con agregación MAR
CG con agregación MAR
MOM con agregación FLR
CG con agregación FLR
Tabla 3.2. Métodos de defuzzificación del
Modo A – FATI considerados en el presente capítulo
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
CG ponderado por el área
CG ponderado por la altura
CG ponderado por el grado de emparejamiento
PMV ponderado por el área
PMV ponderado por la altura
PMV ponderado por el grado de emparejamiento
CG del conjunto difuso de mayor área
CG del conjunto difuso de mayor altura
CG del conjunto difuso de mayor grado de emparejamiento
PMV del conjunto difuso de mayor área
PMV del conjunto difuso de mayor altura
PMV del conjunto difuso de mayor grado de emparejamiento
Media de los Máximos Valores
Media del Mayor y Menor Valor
Centro de Sumas
Tabla 3.3. Métodos de defuzzificación del
Modo B – FITA considerados en el presente capítulo
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
68
3.3 Metodología de la Comparación
Con objeto de estudiar el comportamiento de los diferentes SBRDs diseñados con
los operadores de conjunción e implicación y métodos de defuzzificación
seleccionados en la sección anterior, se ha definido una metodología de comparación
que se describe en la presente sección y que será empleada también en capítulos
sucesivos.
Tres han sido las aplicaciones elegidas:
•
el modelado difuso de dos superficies tridimensionales, F1 y F2, que
consisten en dos funciones matemáticas cuyas expresiones tienen dos
variables de entrada y una de salida,
•
y el modelado difuso del problema de los costes óptimos teóricos del tendido
eléctrico de media tensión en núcleos urbanos, que se ha llamado E2.
La descripción detallada de las tres aplicaciones puede encontrarse en el
Apéndice II de esta memoria.
Cada sistema diseñado se notará por S[i,j,k] donde i hace referencia al operador
de conjunción Ti, j hace relación al operador de implicación Ij, y k se refiere al
método de defuzzificación Dk. La salida del sistema se notará por S[i,j,k] (xm), donde
xm es el vector de variables de entrada proporcionadas por el sistema a modelar.
Con objeto de definir una metodología de comparación que nos permita evaluar
el comportamiento de cada sistema, vamos a establecer varias medidas que nos
habiliten para verificar la precisión del SBRD diseñado, de modo similar a como se
realizan en [HDR93].
Para evaluar los distintos SBRDs, utilizaremos la medida del Error Cuadrático
Medio (ECM) introducida en la Sección 2.4, el cual se calcula mediante la siguiente
expresión:
ECM (S [i, j, k ] ) =
1
2
N
∑ ( ym - S [i, j, k] (xm ) ) 2
m=1
N
.
Esta medida se realiza utilizando un conjunto de N vectores Zm=( xm, ym ),
m=1,...,N, donde xm son los valores de entrada del SBRD mientras que ym son los
valores teóricos ideales.
Para poder unificar el resultado de varios experimentos (en este caso tres),
utilizaremos las siguientes medidas de adaptación:
Metodología de la Comparación
•
69
Grado de Adaptación asociado al Error Cuadrático Medio [GA_ECM]:
MinV = Min (ECM (S [i, j, k ])) ,
i, j,k
MaxV = Max (ECM (S [i, j, k ])) ,
i, j,k
GA_ECM [i, j, k ] = 1 -
ECM(S [i, j, k ]) - MinV
.
MaxV - MinV
Esta medida toma valores en el intervalo [0,1], lo cual permite
homogeneizar los resultados de los distintos problemas. Un SBRD
manifestará mejor comportamiento cuanto más cerca de 1 se encuentren sus
valores en el GA_ECM, ya que toman valor en el intervalo [0,1], ∀ i, j, k.
•
Media de los Grados de Adaptación (MGA), la cual puede aplicarse a
cualquiera de los tres operadores: conjunción, implicación y método de
defuzzificación, para obtener una medida del comportamiento medio del
operador específico en la tarea concreta:
o
Para un operador de conjunción (MGA_C):
MGA_C [i] =
1 Q R
∑∑ GA_EMC[i, j, k] .
Q ⋅ R j=1 k =1
Donde i es el operador de conjunción, que puede tomar valores entre 1
y P, j está asociado al operador de implicación que toma valores entre 1
y Q, y k es el índice del método de defuzzificación que toma valores
entre 1 y R. P, Q y R son, respectivamente, el número de operadores
considerados en el estudio para cada tarea.
o
Para un operador de implicación (MGA_I):
MGA_I [ j] =
1 P R
GA_EMC[i, j, k ] .
P ⋅ R ∑∑
i = 1 k =1
Este grado de adaptación nos proporciona una medida de la robustez de
un operador de implicación para un problema específico. En esta
memoria se utiliza el término robustez de un operador de implicación,
como se ha indicado, en el sentido de buen comportamiento medio en
diferentes aplicaciones y con diferentes métodos de defuzzificación.
o
Para un método de defuzzificación (MGA_D):
70
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
MGA_D [k ] =
1 P Q
∑∑ GA_EMC[i, j, k] .
P ⋅ Q i=1 j=1
Con objeto de unificar globalmente los resultados de cada una de las tres
aplicaciones se utiliza la medida del Promedio de las Medias de los Grados de
Adaptación (PMGA), que se define de la siguiente forma para el caso
correspondiente a los operadores de conjunción:
PMGA _ C [i] =
MGA _ CF 1[i ] + MGA _ CF 2 [i] + MGA _ CE 3 [i]
,
3
y de modo análogo para los de implicación y los métodos de defuzzificación,
obteniéndose el PMGA_I y el PMGA_D respectivamente.
Finalmente cabe señalar que para la experimentación de este capítulo, contamos
con cinco operadores de conjunción (valor de la constante P), catorce operadores de
implicación (valor de Q) y diecinueve métodos de defuzzificación (valor de R).
3.4 Resultados Obtenidos
En esta sección se mostrarán diferentes tablas con los resultados de las medidas
introducidas en la Sección 3.3 obtenidas por los operadores de conjunción e
implicación y métodos de defuzzificación aplicados a los tres problemas de
modelado difuso.
Es importante destacar que no todas las combinaciones de operadores de
implicación y métodos de defuzzificación son posibles. A veces, el operador de
implicación presenta discontinuidades en la función de pertenencia de su conjunto
difuso inferido como puede observarse en las representaciones gráficas de los
mismos que pueden consultarse en el Apéndice I de la presente memoria. Cuando
la discontinuidad de la función de pertenencia da lugar a situaciones tales como un
solo punto distinto de cero, es necesario proceder de alguna forma especial para
realizar la defuzzificación. Por ejemplo, en [RG93a] se realiza tomando como valor
de salida precisamente ese elemento. Extrapolando ese modo de proceder, cuando
el número de puntos distintos de cero es dos y, en general cuando es finito, se
tomaría el punto medio entre ellos. En cualquier caso, sólo se puede realizar
trabajando en el Modo B – FITA, pues no es posible realizar la agregación previa a
la defuzzificación que conlleva el Modo A – FATI. Los operadores de implicación I8
e I15 presentarán este problema cuando las funciones de pertenencia de los
conjuntos difusos de las reglas de control sean triangulares, habiéndose procedido
en nuestra experimentación como se ha indicado anteriormente. Las combinaciones
Resultados Obtenidos
71
que no son posibles aparecen marcadas con un asterisco (*) en la celda
correspondiente de las tablas de resultados.
Con objeto de mejorar la legibilidad del capítulo se han ubicado en esta sección
sólo las tablas de resultados globales trasladando las tablas de resultados de las
aplicaciones individuales (Tablas 3.9 a 3.38) al Apéndice B del presente capítulo.
Las Tablas 3.9 a 3.18 corresponden al modelado difuso de la superficie
tridimensional F1 , las Tablas 3.19 a 3.28 al de la superficie tridimensional F2 y las
Tablas 3.29 a 3.38 al problema eléctrico de los costes óptimos de la línea de media
tensión en núcleos urbanos, E2. En cada grupo de estos tres citados, cada par de
tablas corresponde a un operador de conjunción de los cinco utilizados, de ahí que
se obtengan diez tablas para los cinco operadores de conjunción. Por ejemplo, las
Tablas 3.9 y 3.10 contienen los GA_ECM para la aplicación F1 y el operador de
conjunción T1 con los catorce operadores de implicación seleccionados (los siete
primeros en la Tabla 3.9 y los siete siguientes en la Tabla 3.10) y diecinueve
métodos de defuzzificación. Nótese que a pie de tabla se marcan los valores
máximos y mínimos del GA_ECM para las diez tablas correspondientes de la
aplicación, lo cual permite calcular el ECM concreto de cualquier combinación. En
las tablas se ha destacado en negrita el valor máximo y en cursiva el mínimo.
La Tablas 3.4 a 3.6 presentan las Medias de los Grados de Adaptación (MGAs)
para cada tipo de operador: conjunción, implicación y método de defuzzificación,
respectivamente. Cada una de las tablas muestra también el promedio para las
tres aplicaciones, PMGA.
T1
T2
T3
T4
T5
I1
I2
I3
I4
I5
I6
I7
I8
I10
I11
I12
I13
I14
I15
MGA_CF1
0.51359
0.50705
0.50547
0.50350
0.52190
MGA_CF2
0.57836
0.57317
0.57184
0.57082
0.57989
MGA_CE2
0.61968
0.60488
0.58510
0.57666
0.42050
PMGA_C
0.57054
0.56170
0.55414
0.55033
0.50743
Tabla 3.4. MGA_C para cada aplicación y PMGA_C conjunto
MGA_IF1
0.24538
0.27442
0.25907
0.31251
0.31285
0.26663
0.15468
0.34045
0.89076
0.76491
0.75159
0.84700
0.85426
0.92030
MGA_IF2
0.33073
0.35270
0.34023
0.41433
0.41453
0.34722
0.26090
0.41025
0.93736
0.79404
0.78713
0.87221
0.89033
0.93713
MGA_IE2
0.30635
0.32633
0.32653
0.46172
0.46163
0.32589
0.13527
0.46226
0.87985
0.73771
0.87878
0.87044
0.83714
0.89951
Tabla 3.5. MGA_I para cada aplicación y PMGA_I conjunto
PMGA_I
0.29416
0.31781
0.30861
0.39619
0.39634
0.31325
0.18362
0.40432
0.90266
0.76556
0.80583
0.86322
0.86058
0.91898
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
72
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
MGA_DF1
0.49867
0.23987
0.21863
0.23286
0.42917
0.45743
0.71961
0.45578
0.49092
0.95981
0.38590
0.39772
0.69642
0.38483
0.39314
0.89373
0.46522
0.82529
0.42917
MGA_DF2
0.64367
0.41072
0.30381
0.31255
0.49663
0.52231
0.75044
0.52218
0.55362
0.96627
0.46429
0.46056
0.73591
0.46277
0.43244
0.92192
0.53714
0.83791
0.49663
MGA_DE2
0.69873
0.46384
0.32524
0.31548
0.40807
0.44124
0.66488
0.46388
0.50086
0.88992
0.38341
0.63992
0.69631
0.38181
0.78411
0.89042
0.47586
0.77069
0.40807
PMGA_D
0.61369
0.37148
0.28256
0.28696
0.44462
0.47366
0.71164
0.48061
0.51513
0.93867
0.41120
0.49940
0.70955
0.40980
0.53656
0.90203
0.49274
0.81130
0.44462
Tabla 3.6. MGA_D para cada aplicación y PMGA_D conjunto
Finalmente las Tablas 3.7 y 3.8 muestran las medias de las medidas PMGA_I y
PMGA_D en base a las distintas familias de operadores existentes:
•
La Tabla 3.7 muestra los promedios correspondientes a las familias clásicas
de operadores de implicación.
•
La Tabla 3.8 muestra los promedios correspondientes a los modos de trabajo
de los métodos de defuzzificación.
Extensiones de Implicación Booleana
Funciones de Implicacion
Otros
S-Implic.
R-Implic.
0.30846
0.36859
0.29397
0.33772
0.32678
Extensiones de Conjuncion Booleana
T-normas
0.85280
Tabla 3.7. Media del PMGA_I para las
familias clásicas de operadores de implicación
Modo A – FATI
Agregación con mínimo
Agregación con máximo
(MAR)
(FLR)
0.49258
0.28476
0.38867
Modo B – FITA
0.58544
Tabla 3.8. Media del PMGA_D para los dos
modos de trabajo de los métodos de defuzzificación
Análisis de Resultados
73
Debemos puntualizar que aquellas combinaciones cuyos valores no eran
computables (por los motivos enunciados anteriormente en esta misma sección) y
que aparecen marcados con asteriscos en las correspondientes celdas de las tablas,
no han sido considerados en los cálculos de los resultados medios.
3.5 Análisis de Resultados
En esta sección se van a analizar detenidamente los resultados obtenidos en los
experimentos desarrollados.
En cuanto a los operadores de conjunción:
1. En primer lugar, observando la columna PMGA_C de Tabla 3.4, se aprecia
claramente que los operadores de conjunción presentan un comportamiento
muy similar. Destaca el comportamiento del operador mínimo (T1) con un
ligero mejor resultado mientras que el operador producto acotado (T5)
muestra la cifra ligeramente más baja.
2. Estudiando más detalladamente la Tabla 3.4 se observa que en los
problemas F1 y F2 el operador que presenta mejor comportamiento (con una
pequeña diferencia) es precisamente el producto acotado (T5) con resultados
muy próximos al mínimo (T1). Este hecho no es aparentemente coherente
con la observación realizada en el punto anterior pero se le encuentra
sentido si se observan los resultados para la aplicación E2 donde el operador
producto acotado se destaca negativamente de un modo claro. En definitiva
tenemos un comportamiento bastante uniforme de los otros cuatro
operadores independientemente de la aplicación que no se mantiene con el
operador producto acotado (T5). ¿Cuál es la explicación de un
comportamiento dependiente de la aplicación por parte del operador de
conjunción producto acotado? – Seguramente, la respuesta se encuentra en
la característica diferente de la aplicación del problema eléctrico E2 frente a
las aplicaciones de las superficies tridimensionales F1 y F2: las dos últimas
tienen dos antecedentes mientras que la primera aplicación tiene cuatro
antecedentes. El efecto de realizar la conjunción mediante la t-norma del
producto acotado para más de dos antecedentes no parece ser adecuado.
En cuanto a los operadores de implicación:
1. La Tabla 3.7 muestra importantes diferencias entre las diferentes familias
de operadores de implicación. La familia de las t-normas es la mejor de un
modo contundente ya que su promedio es muy superior al de las otras
74
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
familias por lo que esta familia claramente es más adecuada que las demás
para las aplicaciones de modelado difuso.
2. La familia de las funciones de implicación, ampliamente conocidas y
utilizadas, no muestra un buen comportamiento en general en los problemas
de modelado estudiados. Las R-implicaciones destacan sobre las SImplicaciones. Los otros operadores de implicación pertenecientes a la
familia de los que extienden la implicación booleana tienen peor
comportamiento que las funciones de implicación.
3. Analizando las tablas parciales (Tablas 3.9 a 3.38) se puede observar que
existen determinadas combinaciones de operadores de implicación y
métodos de defuzzificación que presentan buen comportamiento aunque en
media ese mismo operador de implicación no obtuviese un buen valor. Es el
caso de los operadores de implicación de Gödel (I4) y Goguen (I5) en
combinación con los métodos de defuzzificación D21 (CG ponderado por el
grado de emparejamiento) y D24 (PMV ponderado por el grado de
emparejamiento), o el de Lukasiewicz (I6) con D1 (MOM con agregación
MAR) entre otros.
En cuanto a los métodos de defuzzificación:
1. Los resultados globales presentados en la Tabla 3.8 muestran claramente
como los métodos de defuzzificación que trabajan en el Modo B – FITA son
los que obtienen los mejores valores. Dentro de los que trabajan en Modo A
– FATI, los que agregan con la t-norma del mínimo (MAR) en media son
superiores a los que lo hacen con la t-conorma del máximo (FLR).
2. Observando la Tabla 3.6 podemos apreciar que los métodos de
defuzzificación D24 y D30 (PMV ponderado y del conjunto difuso de mayor
grado de emparejamiento, respectivamente) obtienen los mejores valores
medios que el resto de los métodos de defuzzificación al emplearlos con los
diferentes operadores de implicación y en las diferentes aplicaciones de
modelado difuso. Estos métodos tienen la característica común de trabajar
en Modo B – FITA y ser precisamente los basados en el Punto de Máximo
Valor como valor característico y en el grado de emparejamiento como grado
de importancia.
3. Destacar también como se hizo en el apartado de los operadores de
implicación, que determinados métodos de defuzzificación que no muestran
buen comportamiento en media, sí lo hacen en ciertas combinaciones con
determinados operadores de implicación.
Conclusiones
75
3.6 Conclusiones
En este capítulo se ha diseñado un amplio grupo de SBRDs como resultado de la
combinación de una selección de los operadores de conjunción e implicación y
métodos de defuzzificación más comúnmente empleados en la literatura
especializada (cinco operadores de conjunción, catorce operadores de implicación y
diecinueve métodos de defuzzificación). Dichos sistemas han sido aplicados a tres
problemas de modelado difuso: dos superficies tridimensionales y el de los costes
óptimos teóricos de la línea de media tensión en núcleos urbanos. El objetivo era
conocer qué operadores difusos son los más adecuados desde un punto de vista
práctico.
Se ha llegado a las siguientes conclusiones:
•
En lo relativo al operador de conjunción, la elección de la t-norma empleada
para esta tarea tiene poca influencia. Cualquiera de ellas obtiene unos
resultados muy similares por lo que la elección de este operador no debe ser
una tarea importante para el diseñador. Sólo cabe destacar la excepción que
supone el operador de conjunción producto acotado que destaca ligeramente
sobre el resto cuando se utilizan sólo dos antecedentes pero que se comporta
sensiblemente peor con más. El operador de conjunción mínimo es el que
presenta mejores resultados respecto al resto independientemente del
número de antecedentes, aunque las diferencias no son muy significativas.
•
Lo más destacado en lo referente a los operadores de implicación es que los
operadores que extienden la conjunción booleana presentan mejor
comportamiento que los que extienden la implicación booleana. Las t-normas
como subfamilia concreta son los operadores que mejores valores obtienen en
los índices medios. Estudiando más detenidamente los resultados podemos
ver que este buen promedio lo origina el hecho de no existir prácticamente
combinaciones que las empleen y que no presenten buen comportamiento, si
bien no se puede afirmar que en todas las combinaciones con otros métodos
de defuzzificación sean adecuadas. Estudiando los operadores de implicación
de la familia de las funciones de implicación clásicas, observamos que la
subfamilia de las R-implicaciones ofrece buenos resultados con determinados
métodos de defuzzificación, así como algún otro operador aislado. Sin
embargo en la mayoría de los casos, este hecho no se da y por ello sus medias
son muy inferiores a las de los operadores de implicación t-norma.
•
En lo relativo a los métodos de defuzzificación, son dos los resultados
principales: los métodos que trabajan en Modo B – FITA presentan los
mejores resultados medios y el grado de emparejamiento es la información
adicional que mejor lo complementa, preferentemente actuando en
combinación con el Punto de Máximo Valor. Estos dos resultados son
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
76
importantes pues no existen estudios
defuzzificación en este modo de trabajo.
previos
detallados
sobre
la
Estas conclusiones obtenidas en el presente Capítulo 3 suscitan a su vez una
serie de nuevos interrogantes que se pueden dividir en dos grupos:
1. Sobre los operadores de implicación: La mejor familia de operadores de
implicación es la de las t-normas, las cuales forman parte de los operadores
que extienden la conjunción booleana. Entonces:
•
¿Será suficiente condición ser extensión de la conjunción booleana para
ser un buen operador de implicación? ¿Habrá que añadir alguna otra
propiedad adicional?
•
¿Será posible obtener un conjunto de propiedades tales que aplicadas a un
operador de implicación se pueda prever un comportamiento bueno en
promedio en diferentes aplicaciones y combinado con los distintos métodos
de defuzzificación?
•
¿Podrá clasificarse cualquier operador de implicación para saber a priori
con qué métodos de defuzzificación será posible obtener buenos
resultados?
Estas cuestiones serán contestadas en el Capítulo 4 de la presente memoria.
2. En cuanto a los métodos de defuzzificación, se ha observado el buen
comportamiento de los que trabajan en el Modo B – FITA, así como el valor
de los que emplean la información adicional que supone el grado de
emparejamiento para la defuzzificación. Queda abierto pues un estudio
adicional de los métodos de defuzzificación pues su comportamiento parece
directamente relacionado con el operador de implicación por un lado y con
determinadas formas de trabajo y características por otro. Este estudio será
llevado a cabo en el Capítulo 5 de la presente memoria.
Apéndice A: Operadores de Conjunción
77
Apéndice A: Operadores de Conjunción
En este apéndice se presentan las expresiones de los operadores de conjunción
utilizados en el presente capítulo. El resto de operadores empleados, de implicación
y métodos de defuzzificación se encuentran en el Apéndice I de la memoria.
•
Producto Lógico (mínimo):
T1 (x,y) = Min (x, y).
•
Producto de Hamacher:
T2 ( x , y ) =
•
x⋅y
.
x+ y-x⋅y
Producto Algebraico:
T3 (x,y) = x· y.
•
Producto de Einstein:
T4 ( x , y ) =
•
x⋅y
.
1 + (1 - x) ⋅ (1 - y)
Producto Acotado (Lukasiewicz):
T5 (x,y) = Max (0, x+y-1).
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
78
Apéndice B: Resultados Parciales
En este apéndice se muestran las tablas parciales de los Grados de Adaptación
asociados al Error Cuadrático Medio (GA_ECM) para cada operador de conjunción
en cada una de las tres aplicaciones de modelado difuso utilizadas.
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.91664
0.25577
0.00830
0.00830
0.01168
0.01677
0.21332
0.10214
0.14486
0.99711
0.00830
0.00881
0.30467
0.00830
0.00000
0.90958
0.14486
0.81557
0.01168
I2
0.94270
0.43466
0.00830
0.00830
0.02096
0.02947
0.40597
0.10371
0.13470
0.98587
0.00830
0.01041
0.53235
0.00830
0.00705
0.91964
0.13470
0.76057
0.02096
I3
0.95679
0.32504
0.00830
0.00830
0.01478
0.02137
0.27954
0.10507
0.14486
0.99711
0.00830
0.00953
0.37920
0.00830
0.00000
0.90958
0.14486
0.81557
0.01478
I4
0.27759
0.27632
0.00830
0.00830
0.03540
0.13709
0.99119
0.03554
0.13842
0.99363
0.00830
0.00531
0.91957
0.00830
0.00478
0.91648
0.13842
0.79428
0.03540
I5
0.27759
0.27640
0.00830
0.00830
0.03846
0.13632
0.98994
0.03874
0.13842
0.99363
0.00830
0.00603
0.92002
0.00830
0.00478
0.91648
0.13842
0.79428
0.03846
I6
0.95820
0.36405
0.00830
0.00830
0.01785
0.02551
0.33632
0.10284
0.13842
0.99363
0.00830
0.01014
0.44118
0.00830
0.00478
0.91648
0.13842
0.79428
0.01785
I7
0.91648
0.25068
0.00830
0.00830
0.01006
0.01279
0.17054
0.02303
0.03514
0.71794
0.00830
0.00830
0.25068
0.00830
0.00830
0.91648
0.04705
0.71518
0.01006
Tabla 3.9. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T1 para los operadores de implicación I1 a I7.
El ECM máximo es 93.10390 y el mínimo ECM es 1.99270.
I8
*
*
*
*
0.03211
0.13842
0.99363
0.03211
0.13842
0.99363
0.00830
0.00478
0.91648
0.00830
0.00478
0.91648
0.13842
0.79428
0.03211
I10
0.27487
0.27487
0.91648
0.96791
0.97469
0.98994
0.98994
0.97910
0.99363
0.99363
0.90480
0.92002
0.92002
0.90523
0.91648
0.91648
0.92281
0.91028
0.97469
I11
0.00830
0.00830
0.10708
0.11032
0.97587
0.99044
0.99044
0.98495
0.99711
0.99711
0.90521
0.91995
0.91995
0.90462
0.90958
0.90958
0.92414
0.90816
0.97587
I12
0.00830
0.00830
0.00830
0.00830
0.98325
0.99156
0.99156
0.99069
0.99711
0.99711
0.90895
0.91969
0.91969
0.90778
0.90958
0.90958
0.92414
0.90816
0.98325
I13
0.13420
0.13463
0.53438
0.56856
0.98565
0.99213
0.99213
0.99229
0.99711
0.99711
0.91674
0.91947
0.91947
0.91225
0.90958
0.90958
0.92414
0.90816
0.98565
I14
0.00830
0.00830
0.90958
0.98761
0.99139
0.99513
0.99513
0.99276
0.99711
0.99711
0.91703
0.91750
0.91750
0.91026
0.90958
0.90958
0.92414
0.90816
0.99139
I15
*
*
*
*
0.92414
0.99711
0.99711
0.92414
0.99711
0.99711
0.76244
0.90958
0.90958
0.76244
0.90958
0.90958
0.92414
0.90816
0.92414
Tabla 3.10. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T1 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
Apéndice B: Resultados Parciales
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.91599
0.19278
0.00830
0.00830
0.01091
0.01434
0.16567
0.10784
0.14486
0.99820
0.00830
0.00863
0.22919
0.00830
0.00000
0.90958
0.14486
0.81557
0.01091
I2
0.94297
0.36571
0.00830
0.00830
0.01921
0.02545
0.34738
0.10800
0.13470
0.98728
0.00830
0.00999
0.45035
0.00830
0.00705
0.91964
0.13470
0.76057
0.01921
79
I3
0.96001
0.26203
0.00830
0.00830
0.01388
0.01858
0.23164
0.11062
0.14486
0.99820
0.00830
0.00926
0.30759
0.00830
0.00000
0.90958
0.14486
0.81557
0.01388
I4
0.27751
0.27660
0.00830
0.00830
0.03639
0.13690
0.99227
0.03651
0.13792
0.99411
0.00830
0.00553
0.91968
0.00830
0.00517
0.91770
0.13792
0.79044
0.03639
I5
0.27751
0.27640
0.00830
0.00830
0.03931
0.13613
0.99092
0.03956
0.13792
0.99411
0.00830
0.00619
0.92016
0.00830
0.00517
0.91770
0.13792
0.79044
0.03931
I6
0.95970
0.30451
0.00830
0.00830
0.01681
0.02240
0.28837
0.10769
0.13792
0.99411
0.00830
0.00980
0.37294
0.00830
0.00517
0.91770
0.13792
0.79044
0.01681
I7
0.68535
0.16349
0.00830
0.00830
0.00943
0.01107
0.12167
0.01966
0.02741
0.57620
0.00830
0.00830
0.16349
0.00830
0.00830
0.68535
0.03696
0.53240
0.00943
Tabla 3.11. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T2 para los operadores de implicación I1 a I7.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
I8
*
*
*
*
0.03386
0.13792
0.99411
0.03386
0.13792
0.99411
0.00830
0.00517
0.91770
0.00830
0.00517
0.91770
0.13792
0.79044
0.03386
I10
0.27489
0.27494
0.91770
0.97031
0.97761
0.99092
0.99092
0.98143
0.99411
0.99411
0.90644
0.92016
0.92016
0.90710
0.91770
0.91770
0.92210
0.90896
0.97761
I11
0.00830
0.00830
0.10708
0.11062
0.97812
0.99157
0.99157
0.98720
0.99820
0.99820
0.90653
0.92003
0.92003
0.90675
0.90958
0.90958
0.92414
0.90816
0.97812
I12
0.00830
0.00830
0.00830
0.00830
0.98494
0.99288
0.99288
0.99212
0.99820
0.99820
0.90895
0.91969
0.91969
0.90778
0.90958
0.90958
0.92414
0.90816
0.98494
I13
0.13387
0.13450
0.54839
0.58617
0.98703
0.99351
0.99351
0.99334
0.99820
0.99820
0.91547
0.91942
0.91942
0.91253
0.90958
0.90958
0.92414
0.90816
0.98703
I14
0.00830
0.00830
0.90958
0.98850
0.99214
0.99678
0.99678
0.99292
0.99820
0.99820
0.91645
0.91667
0.91667
0.91026
0.90958
0.90958
0.92414
0.90816
0.99214
I15
*
*
*
*
0.92414
0.99820
0.99820
0.92414
0.99820
0.99820
0.76244
0.90958
0.90958
0.76244
0.90958
0.90958
0.92414
0.90816
0.92414
Tabla 3.12. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T2 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
80
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.91524
0.18212
0.00830
0.00830
0.01051
0.01354
0.15874
0.11281
0.14486
1.00000
0.00830
0.00848
0.20958
0.00830
0.00000
0.90958
0.14486
0.81557
0.01051
I2
0.94297
0.35585
0.00830
0.00830
0.01771
0.02312
0.33389
0.11158
0.13470
0.99042
0.00830
0.00954
0.42190
0.00830
0.00705
0.91964
0.13470
0.76057
0.01771
I3
0.95982
0.24986
0.00830
0.00830
0.01311
0.01721
0.22285
0.11522
0.14486
1.00000
0.00830
0.00900
0.28644
0.00830
0.00000
0.90958
0.14486
0.81557
0.01311
I4
0.27760
0.27688
0.00830
0.00830
0.03748
0.13664
0.99484
0.03758
0.13752
0.99619
0.00830
0.00581
0.91976
0.00830
0.00561
0.91812
0.13752
0.78826
0.03748
I5
0.27760
0.27650
0.00830
0.00830
0.04003
0.13595
0.99363
0.04025
0.13752
0.99619
0.00830
0.00638
0.92022
0.00830
0.00561
0.91812
0.13752
0.78826
0.04003
I6
0.95974
0.29557
0.00830
0.00830
0.01567
0.02052
0.27803
0.11139
0.13752
0.99619
0.00830
0.00943
0.35078
0.00830
0.00561
0.91812
0.13752
0.78826
0.01567
I7
0.58457
0.14802
0.00830
0.00830
0.00931
0.01081
0.11677
0.01796
0.02482
0.52724
0.00830
0.00830
0.14802
0.00830
0.00830
0.58457
0.03296
0.45773
0.00931
Tabla 3.13. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T3 para los operadores de implicación I1 a I7.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
I8
*
*
*
*
0.03533
0.13752
0.99619
0.03533
0.13752
0.99619
0.00830
0.00561
0.91812
0.00830
0.00561
0.91812
0.13752
0.78826
0.03533
I10
0.27495
0.27501
0.91812
0.97649
0.98392
0.99363
0.99363
0.98723
0.99619
0.99619
0.90861
0.92022
0.92022
0.90897
0.91812
0.91812
0.92167
0.90841
0.98392
I11
0.00830
0.00830
0.10708
0.11127
0.98444
0.99429
0.99429
0.99287
1.00000
1.00000
0.90872
0.92007
0.92007
0.90778
0.90958
0.90958
0.92414
0.90816
0.98444
I12
0.00830
0.00830
0.00830
0.00830
0.98890
0.99569
0.99569
0.99518
1.00000
1.00000
0.90895
0.91969
0.91969
0.90778
0.90958
0.90958
0.92414
0.90816
0.98890
I13
0.13247
0.13408
0.54839
0.58653
0.99015
0.99630
0.99630
0.99555
1.00000
1.00000
0.91668
0.91940
0.91940
0.91288
0.90958
0.90958
0.92414
0.90816
0.99015
I14
0.00830
0.00830
0.90958
0.98455
0.98825
0.99941
0.99941
0.98813
1.00000
1.00000
0.91783
0.91627
0.91627
0.91186
0.90958
0.90958
0.92414
0.90816
0.98825
I15
*
*
*
*
0.92414
1.00000
1.00000
0.92414
1.00000
1.00000
0.76244
0.90958
0.90958
0.76244
0.90958
0.90958
0.92414
0.90816
0.92414
Tabla 3.14. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T3 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
Apéndice B: Resultados Parciales
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.91470
0.17266
0.00830
0.00830
0.01027
0.01304
0.15118
0.11571
0.14486
0.99953
0.00830
0.00842
0.19502
0.00830
0.00000
0.90958
0.14486
0.81557
0.01027
I2
0.94297
0.34265
0.00830
0.00830
0.01684
0.02174
0.32028
0.11368
0.13470
0.99065
0.00830
0.00928
0.39961
0.00830
0.00705
0.91964
0.13470
0.76057
0.01684
81
I3
0.95944
0.23889
0.00830
0.00830
0.01266
0.01638
0.21357
0.11793
0.14486
0.99953
0.00830
0.00884
0.27017
0.00830
0.00000
0.90958
0.14486
0.81557
0.01266
I4
0.27757
0.27694
0.00830
0.00830
0.03811
0.13649
0.99475
0.03820
0.13728
0.99589
0.00830
0.00601
0.91983
0.00830
0.00589
0.91844
0.13728
0.78665
0.03811
I5
0.27757
0.27650
0.00830
0.00830
0.04045
0.13585
0.99362
0.04065
0.13728
0.99589
0.00830
0.00650
0.92026
0.00830
0.00589
0.91844
0.13728
0.78665
0.04045
I6
0.95974
0.28514
0.00830
0.00830
0.01501
0.01941
0.26733
0.11356
0.13728
0.99589
0.00830
0.00921
0.33328
0.00830
0.00589
0.91844
0.13728
0.78665
0.01501
I7
0.49716
0.13765
0.00830
0.00830
0.00923
0.01063
0.11120
0.01617
0.02248
0.46014
0.00830
0.00830
0.13765
0.00830
0.00830
0.49716
0.02902
0.38711
0.00923
Tabla 3.15. A_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T4 para los operadores de implicación I1 a I7.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
I8
*
*
*
*
0.03619
0.13728
0.99589
0.03619
0.13728
0.99589
0.00830
0.00589
0.91844
0.00830
0.00589
0.91844
0.13728
0.78665
0.03619
I10
0.27494
0.27495
0.91844
0.97778
0.98531
0.99362
0.99362
0.98836
0.99589
0.99589
0.90857
0.92026
0.92026
0.90896
0.91844
0.91844
0.92131
0.90785
0.98531
I11
0.00830
0.00830
0.10708
0.11147
0.98595
0.99429
0.99429
0.99410
0.99953
0.99953
0.90870
0.92011
0.92011
0.90778
0.90958
0.90958
0.92414
0.90816
0.98595
I12
0.00830
0.00830
0.00830
0.00830
0.98951
0.99574
0.99574
0.99537
0.99953
0.99953
0.91199
0.91969
0.91969
0.90847
0.90958
0.90958
0.92414
0.90816
0.98951
I13
0.13210
0.13399
0.54839
0.58625
0.99049
0.99634
0.99634
0.99546
0.99953
0.99953
0.91673
0.91938
0.91938
0.91225
0.90958
0.90958
0.92414
0.90816
0.99049
I14
0.00830
0.00830
0.90958
0.98184
0.98547
0.99932
0.99932
0.98494
0.99953
0.99953
0.91759
0.91594
0.91594
0.91186
0.90958
0.90958
0.92414
0.90816
0.98547
I15
*
*
*
*
0.92414
0.99953
0.99953
0.92414
0.99953
0.99953
0.76244
0.90958
0.90958
0.76244
0.90958
0.90958
0.92414
0.90816
0.92414
Tabla 3.16. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T4 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
82
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.91262
0.16951
0.00830
0.00830
0.00993
0.01250
0.15752
0.06032
0.08285
0.96905
0.00830
0.00830
0.18223
0.00830
0.00000
0.90958
0.08285
0.81321
0.00993
I2
0.94270
0.34295
0.00830
0.00830
0.01443
0.01875
0.32858
0.06064
0.07702
0.96905
0.00830
0.00834
0.37163
0.00830
0.00705
0.91964
0.07702
0.76270
0.01443
I3
0.94809
0.23480
0.00830
0.00830
0.01144
0.01475
0.22075
0.06182
0.08285
0.96905
0.00830
0.00832
0.25211
0.00830
0.00000
0.90958
0.08285
0.81321
0.01144
I4
0.91401
0.90716
0.00830
0.00830
0.02260
0.07832
0.97156
0.02267
0.07902
0.97194
0.00830
0.00700
0.91996
0.00830
0.00700
0.91880
0.07902
0.78532
0.02260
I5
0.91401
0.90735
0.00830
0.00830
0.02406
0.07789
0.97109
0.02421
0.07902
0.97194
0.00830
0.00703
0.92032
0.00830
0.00700
0.91880
0.07902
0.78532
0.02406
I6
0.95820
0.28553
0.00830
0.00830
0.01292
0.01678
0.27489
0.06025
0.07902
0.97194
0.00830
0.00834
0.31108
0.00830
0.00700
0.91880
0.07902
0.78532
0.01292
I7
0.49638
0.13253
0.00830
0.00830
0.00918
0.01054
0.11606
0.01616
0.02218
0.47596
0.00830
0.00830
0.13253
0.00830
0.00830
0.49638
0.02881
0.38429
0.00918
Tabla 3.17. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T5 para los operadores de implicación I1 a I7.
El ECM máximo es 93.10390 y el mínimo1.99270.
I8
*
*
*
*
0.02102
0.07902
0.97194
0.02102
0.07902
0.97194
0.00830
0.00700
0.91880
0.00830
0.00700
0.91880
0.07902
0.78532
0.02102
I10
0.89889
0.89825
0.91880
0.96694
0.96930
0.97109
0.97109
0.97112
0.97194
0.97194
0.91070
0.92032
0.92032
0.91064
0.91880
0.91880
0.96068
0.96068
0.96930
I11
0.13829
0.14630
0.14183
0.15208
0.97050
0.97137
0.97137
0.97146
0.96905
0.96905
0.91073
0.92017
0.92017
0.90580
0.90958
0.90958
0.95967
0.95967
0.97050
I12
0.00830
0.00830
0.00830
0.00830
0.97014
0.97184
0.97184
0.96961
0.96905
0.96905
0.91558
0.91969
0.91969
0.90753
0.90958
0.90958
0.95967
0.95967
0.97014
I13
0.84530
0.88353
0.89849
0.95651
0.97006
0.97197
0.97197
0.96904
0.96905
0.96905
0.91896
0.91935
0.91935
0.91039
0.90958
0.90958
0.95967
0.95967
0.97006
I14
0.19964
0.19979
0.90958
0.95768
0.95770
0.97123
0.97123
0.95498
0.96905
0.96905
0.91539
0.91539
0.91539
0.90958
0.90958
0.90958
0.95967
0.95967
0.95770
I15
*
*
*
*
0.95967
0.96905
0.96905
0.95967
0.96905
0.96905
0.82912
0.90958
0.90958
0.82912
0.90958
0.90958
0.95967
0.95967
0.95967
Tabla 3.18. GA_ECM obtenido en el modelado difuso de F1 con el
operador de conjunción T5 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 93.10390 y el mínimo es 1.99270.
Apéndice B: Resultados Parciales
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.94120
0.33732
0.12645
0.12645
0.12890
0.13320
0.29972
0.21522
0.25277
0.99960
0.12645
0.12638
0.36183
0.12645
0.00000
0.93314
0.25277
0.80661
0.12890
I2
0.95046
0.49625
0.12645
0.12645
0.13552
0.14239
0.44511
0.21301
0.24028
0.98521
0.12645
0.12588
0.53391
0.12645
0.03777
0.94433
0.24028
0.74353
0.13552
83
I3
0.95783
0.38898
0.12645
0.12645
0.13115
0.13654
0.34910
0.21741
0.25277
0.99960
0.12645
0.12619
0.41644
0.12645
0.00000
0.93314
0.25277
0.80661
0.13115
I4
0.69710
0.69512
0.12645
0.12645
0.14962
0.24341
0.99256
0.14981
0.24510
0.99612
0.12645
0.03394
0.94508
0.12645
0.03289
0.94252
0.24510
0.78689
0.14962
I5
0.69710
0.69512
0.12645
0.12645
0.15180
0.24239
0.99088
0.15217
0.24510
0.99612
0.12645
0.03553
0.94558
0.12645
0.03289
0.94252
0.24510
0.78689
0.15180
I6
0.95934
0.42753
0.12645
0.12645
0.13338
0.13960
0.39272
0.21369
0.24510
0.99612
0.12645
0.12600
0.46427
0.12645
0.03289
0.94252
0.24510
0.78689
0.13338
I7
0.94252
0.31987
0.12645
0.12645
0.12775
0.13035
0.26545
0.13903
0.14930
0.76032
0.12645
0.12645
0.31987
0.12645
0.12645
0.94252
0.15971
0.74212
0.12775
Tabla 3.19. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T1 para los operadores de implicación I1 a I7.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
I8
*
*
*
*
0.14732
0.24510
0.99612
0.14732
0.24510
0.99612
0.12645
0.03289
0.94252
0.12645
0.03289
0.94252
0.24510
0.78689
0.14732
I10
0.69207
0.69172
0.94252
0.96474
0.97660
0.99088
0.99088
0.98381
0.99612
0.99612
0.93479
0.94558
0.94558
0.93520
0.94252
0.94252
0.95067
0.93901
0.97660
I11
0.15260
0.15273
0.17458
0.18043
0.97757
0.99157
0.99157
0.99201
0.99960
0.99960
0.93649
0.94542
0.94542
0.93496
0.93314
0.93314
0.95258
0.93927
0.97757
I12
0.12645
0.12645
0.12645
0.12645
0.98334
0.99314
0.99314
0.99480
0.99960
0.99960
0.93935
0.94505
0.94505
0.93374
0.93314
0.93314
0.95258
0.93927
0.98334
I13
0.36553
0.36821
0.49506
0.50462
0.98522
0.99389
0.99389
0.99528
0.99960
0.99960
0.93936
0.94478
0.94478
0.93374
0.93314
0.93314
0.95258
0.93927
0.98522
I14
0.21400
0.21401
0.93314
0.98605
0.98843
0.99755
0.99755
0.98943
0.99960
0.99960
0.94010
0.94199
0.94199
0.93480
0.93314
0.93314
0.95258
0.93927
0.98843
I15
*
*
*
*
0.95258
0.99960
0.99960
0.95258
0.99960
0.99960
0.78072
0.93314
0.93314
0.78072
0.93314
0.93314
0.95258
0.93927
0.95258
Tabla 3.20. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T1 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
84
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.94072
0.29218
0.12645
0.12645
0.12848
0.13164
0.26674
0.21917
0.25277
1.00000
0.12645
0.12643
0.31176
0.12645
0.00000
0.93314
0.25277
0.80661
0.12848
I2
0.95046
0.44300
0.12645
0.12645
0.13454
0.13992
0.40566
0.21596
0.24028
0.98577
0.12645
0.12616
0.47856
0.12645
0.03777
0.94433
0.24028
0.74353
0.13454
I3
0.95773
0.34441
0.12645
0.12645
0.13064
0.13478
0.31640
0.22126
0.25277
1.00000
0.12645
0.12630
0.36882
0.12645
0.00000
0.93314
0.25277
0.80661
0.13064
I4
0.69713
0.69551
0.12645
0.12645
0.15018
0.24321
0.99289
0.15033
0.24460
0.99592
0.12645
0.03469
0.94515
0.12645
0.03426
0.94329
0.24460
0.78357
0.15018
I5
0.69713
0.69504
0.12645
0.12645
0.15226
0.24220
0.99107
0.15260
0.24460
0.99592
0.12645
0.03610
0.94558
0.12645
0.03426
0.94329
0.24460
0.78357
0.15226
I6
0.95902
0.38455
0.12645
0.12645
0.13278
0.13765
0.36010
0.21688
0.24460
0.99592
0.12645
0.12619
0.41845
0.12645
0.03426
0.94329
0.24460
0.78357
0.13278
I7
0.73689
0.26258
0.12645
0.12645
0.12738
0.12914
0.23126
0.13602
0.14327
0.63392
0.12645
0.12645
0.26258
0.12645
0.12645
0.73689
0.15134
0.58719
0.12738
Tabla 3.21. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T2 para los operadores de implicación I1 a I7.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
I8
*
*
*
*
0.14830
0.24460
0.99592
0.14830
0.24460
0.99592
0.12645
0.03426
0.94329
0.12645
0.03426
0.94329
0.24460
0.78357
0.14830
I10
0.69194
0.69175
0.94329
0.96622
0.97738
0.99107
0.99107
0.98395
0.99592
0.99592
0.93358
0.94558
0.94558
0.93317
0.94329
0.94329
0.95003
0.93764
0.97738
I11
0.15234
0.15273
0.17458
0.18045
0.97820
0.99191
0.99191
0.99280
1.00000
1.00000
0.93514
0.94542
0.94542
0.92969
0.93314
0.93314
0.95258
0.93927
0.97820
I12
0.12645
0.12645
0.12645
0.12645
0.98376
0.99367
0.99367
0.99509
1.00000
1.00000
0.93935
0.94505
0.94505
0.93374
0.93314
0.93314
0.95258
0.93927
0.98376
I13
0.36504
0.36806
0.50694
0.53101
0.98556
0.99449
0.99449
0.99542
1.00000
1.00000
0.93936
0.94476
0.94476
0.93374
0.93314
0.93314
0.95258
0.93927
0.98556
I14
0.21400
0.21401
0.93314
0.98704
0.98832
0.99834
0.99834
0.98899
1.00000
1.00000
0.93981
0.94149
0.94149
0.93480
0.93314
0.93314
0.95258
0.93927
0.98832
I15
*
*
*
*
0.95258
1.00000
1.00000
0.95258
1.00000
1.00000
0.78072
0.93314
0.93314
0.78072
0.93314
0.93314
0.95258
0.93927
0.95258
Tabla 3.22. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T2 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
Apéndice B: Resultados Parciales
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.93989
0.28314
0.12645
0.12645
0.12822
0.13111
0.26263
0.22318
0.25277
0.99844
0.12645
0.12645
0.29835
0.12645
0.00000
0.93314
0.25277
0.80661
0.12822
I2
0.95046
0.42980
0.12645
0.12645
0.13351
0.13832
0.39844
0.21886
0.24028
0.98666
0.12645
0.12632
0.45911
0.12645
0.03777
0.94433
0.24028
0.74353
0.13351
85
I3
0.95718
0.33455
0.12645
0.12645
0.13011
0.13384
0.31160
0.22500
0.25277
0.99844
0.12645
0.12638
0.35461
0.12645
0.00000
0.93314
0.25277
0.80661
0.13011
I4
0.69717
0.69578
0.12645
0.12645
0.15094
0.24292
0.99299
0.15107
0.24413
0.99531
0.12645
0.03582
0.94521
0.12645
0.03564
0.94363
0.24413
0.78207
0.15094
I5
0.69717
0.69512
0.12645
0.12645
0.15275
0.24199
0.99135
0.15305
0.24413
0.99531
0.12645
0.03674
0.94560
0.12645
0.03564
0.94363
0.24413
0.78207
0.15275
I6
0.95899
0.37540
0.12645
0.12645
0.13198
0.13633
0.35466
0.21972
0.24413
0.99531
0.12645
0.12632
0.40352
0.12645
0.03564
0.94363
0.24413
0.78207
0.13198
I7
0.67477
0.25122
0.12645
0.12645
0.12729
0.12895
0.22787
0.13502
0.14153
0.60851
0.12645
0.12645
0.25122
0.12645
0.12645
0.67477
0.14881
0.54029
0.12729
Tabla 3.23. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T3 para los operadores de implicación I1 a I7.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
I8
*
*
*
*
0.14928
0.24413
0.99531
0.14928
0.24413
0.99531
0.12645
0.03564
0.94363
0.12645
0.03564
0.94363
0.24413
0.78207
0.14928
I10
0.69169
0.69156
0.94363
0.97285
0.98073
0.99135
0.99135
0.98658
0.99531
0.99531
0.93570
0.94560
0.94560
0.93562
0.94363
0.94363
0.94961
0.93715
0.98073
I11
0.15191
0.15270
0.17458
0.18041
0.98169
0.99218
0.99218
0.99505
0.99844
0.99844
0.93730
0.94545
0.94545
0.93189
0.93314
0.93314
0.95258
0.93927
0.98169
I12
0.12645
0.12645
0.12645
0.12645
0.98553
0.99394
0.99394
0.99517
0.99844
0.99844
0.93935
0.94505
0.94505
0.93374
0.93314
0.93314
0.95258
0.93927
0.98553
I13
0.36321
0.36784
0.50694
0.53409
0.98674
0.99470
0.99470
0.99489
0.99844
0.99844
0.93935
0.94474
0.94474
0.93374
0.93314
0.93314
0.95258
0.93927
0.98674
I14
0.21400
0.21401
0.93314
0.98429
0.98410
0.99802
0.99802
0.98355
0.99844
0.99844
0.93962
0.94117
0.94117
0.93480
0.93314
0.93314
0.95258
0.93927
0.98410
I15
*
*
*
*
0.95258
0.99844
0.99844
0.95258
0.99844
0.99844
0.78072
0.93314
0.93314
0.78072
0.93314
0.93314
0.95258
0.93927
0.95258
Tabla 3.24. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T3 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 6.24770 y el mínimo 0.04200.
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
86
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.93938
0.27505
0.12645
0.12645
0.12808
0.13075
0.25702
0.22549
0.25277
0.99691
0.12645
0.12645
0.28785
0.12645
0.00000
0.93314
0.25277
0.80661
0.12808
I2
0.95046
0.41744
0.12645
0.12645
0.13294
0.13737
0.38917
0.22052
0.24028
0.98629
0.12645
0.12637
0.44319
0.12645
0.03777
0.94433
0.24028
0.74353
0.13294
I3
0.95683
0.32567
0.12645
0.12645
0.12982
0.13326
0.30517
0.22718
0.25277
0.99691
0.12645
0.12642
0.34315
0.12645
0.00000
0.93314
0.25277
0.80661
0.12982
I4
0.69707
0.69584
0.12645
0.12645
0.15134
0.24276
0.99222
0.15147
0.24386
0.99423
0.12645
0.03632
0.94528
0.12645
0.03622
0.94389
0.24386
0.78057
0.15134
I5
0.69707
0.69509
0.12645
0.12645
0.15302
0.24187
0.99065
0.15329
0.24386
0.99423
0.12645
0.03701
0.94561
0.12645
0.03622
0.94389
0.24386
0.78057
0.15302
I6
0.95891
0.36644
0.12645
0.12645
0.13152
0.13555
0.34747
0.22138
0.24386
0.99423
0.12645
0.12637
0.39125
0.12645
0.03622
0.94389
0.24386
0.78057
0.13152
I7
0.64903
0.24236
0.12645
0.12645
0.12722
0.12880
0.22315
0.13473
0.14066
0.59505
0.12645
0.12645
0.24236
0.12645
0.12645
0.64903
0.14774
0.52059
0.12722
Tabla 3.25. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T4 para los operadores de implicación I1 a I7.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
I8
*
*
*
*
0.14983
0.24386
0.99423
0.14983
0.24386
0.99423
0.12645
0.03622
0.94389
0.12645
0.03622
0.94389
0.24386
0.78057
0.14983
I10
0.69164
0.69161
0.94389
0.97486
0.98121
0.99065
0.99065
0.98663
0.99423
0.99423
0.93915
0.94561
0.94561
0.93923
0.94389
0.94389
0.94919
0.93654
0.98121
I11
0.15175
0.15270
0.17458
0.18035
0.98232
0.99149
0.99149
0.99489
0.99691
0.99691
0.93925
0.94547
0.94547
0.93374
0.93314
0.93314
0.95258
0.93927
0.98232
I12
0.12645
0.12645
0.12645
0.12645
0.98551
0.99326
0.99326
0.99420
0.99691
0.99691
0.93935
0.94505
0.94505
0.93374
0.93314
0.93314
0.95258
0.93927
0.98551
I13
0.36231
0.36768
0.50694
0.53477
0.98651
0.99399
0.99399
0.99376
0.99691
0.99691
0.93935
0.94473
0.94473
0.93374
0.93314
0.93314
0.95258
0.93927
0.98651
I14
0.21400
0.21401
0.93314
0.98203
0.98182
0.99700
0.99700
0.98081
0.99691
0.99691
0.93996
0.94088
0.94088
0.93498
0.93314
0.93314
0.95258
0.93927
0.98182
I15
*
*
*
*
0.95258
0.99691
0.99691
0.95258
0.99691
0.99691
0.78072
0.93314
0.93314
0.78072
0.93314
0.93314
0.95258
0.93927
0.95258
Tabla 3.26. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T4 para los operadores de implicación I8 e I10 a I15.
EL ECM máximo es 6.24770 y el mínimo es 0.04200.
Apéndice B: Resultados Parciales
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.93780
0.27123
0.12645
0.12645
0.12785
0.13038
0.26208
0.17292
0.19585
0.97389
0.12645
0.12645
0.27936
0.12645
0.12645
0.93314
0.19585
0.81567
0.12785
I2
0.95169
0.41185
0.12645
0.12645
0.13149
0.13550
0.39722
0.17118
0.18786
0.97220
0.12645
0.12645
0.42672
0.12645
0.12645
0.94433
0.18786
0.76074
0.13149
87
I3
0.95377
0.32087
0.12645
0.12645
0.12907
0.13223
0.31142
0.17419
0.19585
0.97389
0.12645
0.12645
0.33237
0.12645
0.12645
0.93314
0.19585
0.81567
0.12907
I4
0.87059
0.86836
0.12645
0.12645
0.13724
0.18986
0.97636
0.13734
0.19084
0.97736
0.12645
0.12645
0.94539
0.12645
0.12645
0.94421
0.19084
0.78935
0.13724
I5
0.87059
0.86759
0.12645
0.12645
0.13839
0.18916
0.97546
0.13861
0.19084
0.97736
0.12645
0.12645
0.94565
0.12645
0.12645
0.94421
0.19084
0.78935
0.13839
I6
0.95870
0.36309
0.12645
0.12645
0.13027
0.13393
0.35464
0.17165
0.19084
0.97736
0.12645
0.12645
0.37856
0.12645
0.12645
0.94421
0.19084
0.78935
0.13027
I7
0.56205
0.23806
0.12645
0.12645
0.12719
0.12874
0.22702
0.13320
0.13882
0.54811
0.12645
0.12645
0.23806
0.12645
0.12645
0.56205
0.14453
0.45914
0.12719
Tabla 3.27. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T5 para los operadores de implicación I1 a I7.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
I8
*
*
*
*
0.13594
0.19084
0.97736
0.13594
0.19084
0.97736
0.12645
0.12645
0.94421
0.12645
0.12645
0.94421
0.19084
0.78935
0.13594
I10
0.86390
0.86317
0.94421
0.96925
0.97117
0.97546
0.97546
0.97454
0.97736
0.97736
0.94007
0.94565
0.94565
0.94026
0.94421
0.94421
0.96427
0.96427
0.97117
I11
0.15126
0.15528
0.15184
0.15586
0.97191
0.97589
0.97589
0.97465
0.97389
0.97389
0.94017
0.94550
0.94550
0.93392
0.93314
0.93314
0.95907
0.95907
0.97191
I12
0.12645
0.12645
0.12645
0.12645
0.97319
0.97663
0.97663
0.97412
0.97389
0.97389
0.94020
0.94505
0.94505
0.93392
0.93314
0.93314
0.95907
0.95907
0.97319
I13
0.82753
0.84158
0.92127
0.95627
0.97357
0.97689
0.97689
0.97378
0.97389
0.97389
0.94017
0.94471
0.94471
0.93392
0.93314
0.93314
0.95907
0.95907
0.97357
I14
0.54300
0.54448
0.93314
0.96919
0.96922
0.97647
0.97647
0.96666
0.97389
0.97389
0.93962
0.94041
0.94041
0.93498
0.93314
0.93314
0.95907
0.95907
0.96922
I15
*
*
*
*
0.95907
0.97389
0.97389
0.95907
0.97389
0.97389
0.85352
0.93314
0.93314
0.85352
0.93314
0.93314
0.95907
0.95907
0.95907
Tabla 3.28. GA_ECM obtenido en el modelado difuso de F2 con el
operador de conjunción T5 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 6.24770 y el mínimo es 0.04200.
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
88
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.96377
0.39240
0.03520
0.00000
0.00418
0.01033
0.25482
0.24116
0.28616
0.99656
0.00000
0.34164
0.42226
0.00000
0.81520
0.96085
0.28616
0.82897
0.00418
I2
0.96770
0.61133
0.00000
0.00000
0.01912
0.02755
0.40181
0.22184
0.24826
0.95543
0.00000
0.47370
0.61725
0.00000
0.83305
0.95942
0.24826
0.70003
0.01912
I3
0.99916
0.45959
0.22240
0.00000
0.01018
0.01771
0.30825
0.24596
0.28616
0.99656
0.00000
0.38312
0.48695
0.00000
0.81520
0.96085
0.28616
0.82897
0.01018
I4
0.97616
0.96146
0.00000
0.00000
0.09675
0.25472
0.97430
0.09736
0.25801
0.98790
0.00000
0.84532
0.97451
0.00000
0.84699
0.97567
0.25801
0.79665
0.09675
I5
0.97616
0.96346
0.00000
0.00000
0.10206
0.25248
0.97124
0.10336
0.25801
0.98790
0.00000
0.84575
0.97399
0.00000
0.84699
0.97567
0.25801
0.79665
0.10206
I6
1.00000
0.51912
0.00000
0.00000
0.01592
0.02426
0.35580
0.22515
0.25801
0.98790
0.00000
0.42249
0.54390
0.00000
0.84699
0.97567
0.25801
0.79665
0.01592
I7
0.92839
0.36614
0.00000
0.00000
0.00179
0.00569
0.22113
0.01012
0.02260
0.62845
0.00000
0.00928
0.36614
0.00000
0.00950
0.92839
0.02990
0.72943
0.00179
Tabla 3.29. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T1 para los operadores de implicación I1 a I7.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
I8
*
*
*
*
0.09316
0.25801
0.98790
0.09316
0.25801
0.98790
0.00000
0.84699
0.97567
0.00000
0.84699
0.97567
0.25801
0.79665
0.09316
I10
0.94605
0.94617
0.97617
0.95942
0.94510
0.97124
0.97124
0.96189
0.98790
0.98790
0.95530
0.97399
0.97399
0.95993
0.97567
0.97567
0.93295
0.96106
0.94510
I11
0.01862
0.01824
0.01862
0.01824
0.94692
0.97279
0.97279
0.97979
0.99656
0.99656
0.95895
0.97390
0.97390
0.95345
0.96085
0.96085
0.96094
0.95984
0.94692
I12
0.91321
0.93157
0.95174
0.96453
0.96055
0.97726
0.97726
0.98698
0.99656
0.99656
0.96213
0.97429
0.97429
0.95491
0.96085
0.96085
0.96094
0.95984
0.96055
I13
0.87856
0.89666
0.91578
0.92937
0.96055
0.97726
0.97726
0.98698
0.99656
0.99656
0.96213
0.97429
0.97429
0.95491
0.96085
0.96085
0.96094
0.95984
0.96055
I14
0.08403
0.08419
0.96124
0.99179
0.99224
0.98843
0.98843
0.99770
0.99656
0.99656
0.97190
0.97349
0.97349
0.96064
0.96085
0.96085
0.96094
0.95984
0.99224
I15
*
*
*
*
0.96072
0.99635
0.99635
0.96094
0.99656
0.99656
0.89546
0.96063
0.96063
0.89567
0.96085
0.96085
0.96094
0.95984
0.96072
Tabla 3.30. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T1 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
Apéndice B: Resultados Parciales
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.96124
0.22599
0.03979
0.00000
0.00219
0.00508
0.16231
0.25445
0.28616
0.99680
0.00000
0.20868
0.23861
0.00000
0.81520
0.96063
0.28616
0.82897
0.00219
I2
0.96612
0.42718
0.00000
0.00000
0.01279
0.01724
0.29713
0.22973
0.24826
0.95731
0.00000
0.34690
0.43549
0.00000
0.83305
0.95993
0.24826
0.70003
0.01279
89
I3
0.99814
0.29648
0.28638
0.00000
0.00681
0.01057
0.21475
0.25806
0.28616
0.99680
0.00000
0.25881
0.31460
0.00000
0.81520
0.96063
0.28616
0.82897
0.00681
I4
0.97421
0.96358
0.00000
0.00000
0.10089
0.25344
0.97520
0.10127
0.25544
0.98512
0.00000
0.84667
0.97536
0.00000
0.85123
0.97994
0.25544
0.77794
0.10089
I5
0.97421
0.96150
0.00000
0.00000
0.10485
0.25145
0.97122
0.10583
0.25544
0.98512
0.00000
0.84552
0.97364
0.00000
0.85123
0.97994
0.25544
0.77794
0.10485
I6
0.99654
0.36443
0.00000
0.00000
0.01118
0.01548
0.26134
0.23324
0.25544
0.98512
0.00000
0.30378
0.37996
0.00000
0.85123
0.97994
0.25544
0.77794
0.01118
I7
0.59678
0.17113
0.00000
0.00000
0.00084
0.00252
0.12982
0.00666
0.01289
0.48085
0.00000
0.00928
0.17113
0.00000
0.00950
0.59678
0.01831
0.45366
0.00084
Tabla 3.31. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T2 para los operadores de implicación I1 a I7.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
I8
*
*
*
*
0.09909
0.25544
0.98512
0.09909
0.25544
0.98512
0.00000
0.85123
0.97994
0.00000
0.85123
0.97994
0.25544
0.77794
0.09909
I10
0.94616
0.94602
0.97986
0.95669
0.94897
0.97122
0.97122
0.96330
0.98512
0.98512
0.95423
0.97364
0.97364
0.96130
0.97994
0.97994
0.92996
0.95506
0.94897
I11
0.01862
0.01824
0.01862
0.01824
0.95004
0.97341
0.97341
0.98372
0.99680
0.99680
0.95461
0.97394
0.97394
0.95195
0.96063
0.96063
0.96094
0.95984
0.95004
I12
0.90875
0.92848
0.95174
0.96429
0.96370
0.97906
0.97906
0.98934
0.99680
0.99680
0.96273
0.97469
0.97469
0.95662
0.96063
0.96063
0.96094
0.95984
0.96370
I13
0.87410
0.89357
0.91578
0.92912
0.96370
0.97906
0.97906
0.98934
0.99680
0.99680
0.96273
0.97469
0.97469
0.95662
0.96063
0.96063
0.96094
0.95984
0.96370
I14
0.08403
0.08406
0.96124
0.99408
0.99421
0.99141
0.99141
0.99639
0.99680
0.99680
0.97092
0.97122
0.97122
0.96168
0.96063
0.96063
0.96094
0.95984
0.99421
I15
*
*
*
*
0.96072
0.99658
0.99658
0.96094
0.99680
0.99680
0.89546
0.96041
0.96041
0.89567
0.96063
0.96063
0.96094
0.95984
0.96072
Tabla 3.32. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T2 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
90
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.95773
0.19847
0.00000
0.00000
0.00139
0.00379
0.16474
0.23378
0.25395
0.99457
0.00000
0.18492
0.20286
0.00000
0.81520
0.96085
0.25395
0.82931
0.00139
I2
0.96645
0.37198
0.00000
0.00000
0.00685
0.01026
0.29595
0.20449
0.21655
0.96649
0.00000
0.30856
0.37677
0.00000
0.83305
0.95942
0.21655
0.70036
0.00685
I3
0.99626
0.26327
0.14310
0.00000
0.00369
0.00661
0.21536
0.23569
0.25395
0.99457
0.00000
0.23025
0.27143
0.00000
0.81520
0.96085
0.25395
0.82931
0.00369
I4
0.97378
0.96502
0.00000
0.00000
0.10546
0.25160
0.98362
0.10574
0.25315
0.99166
0.00000
0.84748
0.97493
0.00000
0.85250
0.98001
0.25315
0.76948
0.10546
I5
0.97378
0.96158
0.00000
0.00000
0.10740
0.25038
0.98001
0.10804
0.25315
0.99166
0.00000
0.84551
0.97269
0.00000
0.85250
0.98001
0.25315
0.76948
0.10740
I6
0.99611
0.32365
0.00000
0.00000
0.00587
0.00915
0.26043
0.20669
0.22155
0.99161
0.00000
0.27080
0.33096
0.00000
0.85250
0.98001
0.22155
0.76982
0.00587
I7
0.47749
0.14893
0.00000
0.00000
0.00072
0.00223
0.13009
0.00501
0.01037
0.44980
0.00000
0.00928
0.14893
0.00000
0.00950
0.47749
0.01443
0.35933
0.00072
Tabla 3.33. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T3 para los operadores de implicación I1 a I7.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
I8
*
*
*
*
0.10432
0.25315
0.99166
0.10432
0.25315
0.99166
0.00000
0.85250
0.98001
0.00000
0.85250
0.98001
0.25315
0.76948
0.10432
I10
0.43089
0.43051
0.98020
0.96350
0.96750
0.98001
0.98001
0.98048
0.99161
0.99161
0.96543
0.97269
0.97269
0.97298
0.98001
0.98001
0.85079
0.84799
0.96750
I11
0.01862
0.01824
0.01862
0.01824
0.96890
0.98199
0.98199
0.99452
0.99457
0.99457
0.96616
0.97333
0.97333
0.95983
0.96085
0.96085
0.89707
0.87093
0.96890
I12
0.37421
0.39447
0.95174
0.96919
0.97913
0.98700
0.98700
0.99573
0.99457
0.99457
0.97127
0.97429
0.97429
0.96206
0.96085
0.96085
0.89707
0.87093
0.97913
I13
0.33956
0.35955
0.91578
0.93402
0.97913
0.98700
0.98700
0.99573
0.99457
0.99457
0.97127
0.97429
0.97429
0.96206
0.96085
0.96085
0.89707
0.87093
0.97913
I14
0.08403
0.08393
0.96124
0.99014
0.99047
0.99377
0.99377
0.98797
0.99457
0.99457
0.96865
0.96930
0.96930
0.96064
0.96085
0.96085
0.89707
0.87093
0.99047
I15
*
*
*
*
0.96072
0.99432
0.99432
0.96094
0.99454
0.99454
0.89546
0.96063
0.96063
0.89567
0.96085
0.96085
0.96094
0.95984
0.96072
Tabla 3.34. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T3 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
Apéndice B: Resultados Parciales
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.95601
0.17743
0.00000
0.00000
0.00113
0.00328
0.15366
0.21776
0.23414
0.99254
0.00000
0.16778
0.17963
0.00000
0.81520
0.96085
0.23414
0.82931
0.00113
I2
0.96648
0.33159
0.00000
0.00000
0.00507
0.00802
0.27599
0.18760
0.19749
0.96764
0.00000
0.28211
0.33468
0.00000
0.83305
0.95942
0.19749
0.70036
0.00507
91
I3
0.99370
0.23671
0.04512
0.00000
0.00275
0.00530
0.20113
0.21919
0.23414
0.99254
0.00000
0.21028
0.24137
0.00000
0.81520
0.96085
0.23414
0.82931
0.00275
I4
0.97245
0.96461
0.00000
0.00000
0.10679
0.25090
0.98410
0.10703
0.25225
0.99140
0.00000
0.84738
0.97472
0.00000
0.85250
0.97991
0.25225
0.76326
0.10679
I5
0.97245
0.96074
0.00000
0.00000
0.10814
0.24997
0.98060
0.10867
0.25225
0.99140
0.00000
0.84511
0.97217
0.00000
0.85250
0.97991
0.25225
0.76326
0.10814
I6
0.99464
0.29084
0.00000
0.00000
0.00428
0.00713
0.24335
0.18931
0.20164
0.99129
0.00000
0.24814
0.29523
0.00000
0.85250
0.97991
0.20164
0.76359
0.00428
I7
0.42421
0.13374
0.00000
0.00000
0.00063
0.00204
0.12052
0.00439
0.00917
0.40851
0.00000
0.00928
0.13374
0.00000
0.00950
0.42421
0.01272
0.31756
0.00063
Tabla 3.35. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T4 para los operadores de implicación I1 a I7.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
I8
*
*
*
*
0.10586
0.25225
0.99140
0.10586
0.25225
0.99140
0.00000
0.85250
0.97991
0.00000
0.85250
0.97991
0.25225
0.76326
0.10586
I10
0.27457
0.27411
0.98002
0.96555
0.97035
0.98060
0.98060
0.98229
0.99129
0.99129
0.96952
0.97217
0.97217
0.97728
0.97991
0.97991
0.80690
0.81271
0.97035
I11
0.01862
0.01824
0.01862
0.01824
0.97183
0.98258
0.98258
0.99452
0.99254
0.99254
0.97050
0.97310
0.97310
0.96168
0.96085
0.96085
0.86280
0.85223
0.97183
I12
0.23596
0.24808
0.95175
0.97058
0.98142
0.98770
0.98770
0.99489
0.99254
0.99254
0.97211
0.97429
0.97429
0.96168
0.96085
0.96085
0.86280
0.85223
0.98142
I13
0.20131
0.21316
0.91579
0.93542
0.98142
0.98770
0.98770
0.99489
0.99254
0.99254
0.97211
0.97429
0.97429
0.96168
0.96085
0.96085
0.86280
0.85223
0.98142
I14
0.08403
0.08386
0.96125
0.98691
0.98737
0.99250
0.99250
0.98413
0.99254
0.99254
0.96844
0.96786
0.96786
0.96152
0.96085
0.96085
0.86280
0.85223
0.98737
I15
*
*
*
*
0.96072
0.99219
0.99219
0.96094
0.99241
0.99241
0.89546
0.96063
0.96063
0.89567
0.96085
0.96085
0.96094
0.95984
0.96072
Tabla 3.36. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T4 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
Análisis de la Integración de Operadores de Conjunción, Implicación y Métodos de Defuzzificación
92
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D1
D2
D10
D11
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
I1
0.74727
0.16306
0.00000
0.00000
0.00091
0.00294
0.06747
0.01717
0.02863
0.65369
0.00000
0.15708
0.16323
0.00000
0.61119
0.74715
0.02863
0.61505
0.00091
I2
0.73965
0.28001
0.00000
0.00000
0.00255
0.00519
0.18367
0.01525
0.02232
0.64554
0.00000
0.25539
0.28001
0.00000
0.60265
0.73956
0.02232
0.51559
0.00255
I3
0.74751
0.20746
0.00000
0.00000
0.00142
0.00373
0.11165
0.01780
0.02863
0.65369
0.00000
0.19269
0.20762
0.00000
0.61119
0.74715
0.02863
0.61505
0.00142
I4
0.75912
0.75377
0.00000
0.00000
0.00488
0.02394
0.65987
0.00507
0.02525
0.66526
0.00000
0.61616
0.75383
0.00000
0.62128
0.75898
0.02525
0.56945
0.00488
I5
0.75912
0.75137
0.00000
0.00000
0.00534
0.02350
0.65737
0.00565
0.02525
0.66526
0.00000
0.61397
0.75135
0.00000
0.62128
0.75898
0.02525
0.56945
0.00534
I6
0.75912
0.24665
0.00000
0.00000
0.00193
0.00447
0.15065
0.01591
0.02525
0.66526
0.00000
0.22473
0.24676
0.00000
0.62128
0.75898
0.02525
0.56945
0.00193
I7
0.38313
0.12799
0.00000
0.00000
0.00060
0.00197
0.03250
0.00385
0.00838
0.28913
0.00000
0.00928
0.12799
0.00000
0.00950
0.38313
0.01147
0.28640
0.00060
Tabla 3.37. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T5 para los operadores de implicación I1 a I7.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
I8
*
*
*
*
0.00411
0.02525
0.66526
0.00411
0.02525
0.66526
0.00000
0.62128
0.75898
0.00000
0.62128
0.75898
0.02525
0.56945
0.00411
I10
0.75484
0.74883
0.75898
0.75067
0.65683
0.65737
0.65737
0.66496
0.66526
0.66526
0.65751
0.65751
0.65751
0.66514
0.66514
0.66514
0.66292
0.66292
0.65683
I11
0.51417
0.51891
0.51417
0.51891
0.65785
0.65836
0.65836
0.65368
0.65369
0.65369
0.65850
0.65850
0.65850
0.65331
0.65331
0.65331
0.65285
0.65285
0.65785
I12
0.73241
0.74294
0.73765
0.74444
0.65984
0.66009
0.66009
0.65372
0.65369
0.65369
0.66018
0.66018
0.66018
0.65331
0.65331
0.65331
0.65285
0.65285
0.65984
I13
0.67785
0.68581
0.67849
0.68600
0.65984
0.66009
0.66009
0.65372
0.65369
0.65369
0.66018
0.66018
0.66018
0.65331
0.65331
0.65331
0.65285
0.65285
0.65984
I14
0.71551
0.72007
0.74715
0.75109
0.65725
0.65731
0.65731
0.65344
0.65369
0.65369
0.65726
0.65726
0.65726
0.65331
0.65331
0.65331
0.65285
0.65285
0.65725
I15
*
*
*
*
0.65264
0.65347
0.65347
0.65285
0.65369
0.65369
0.65203
0.65309
0.65309
0.65225
0.65331
0.65331
0.65285
0.65285
0.65264
Tabla 3.38. GA_ECM obtenido en el modelado difuso de E2 con el
operador de conjunción T5 para los operadores de implicación I8 e I10 a I15.
El ECM máximo es 4447753.6359 y el mínimo es 65874.1835.
Capítulo 4
Análisis de la Robustez de los
Operadores de Implicación:
Propiedades Básicas y
Caracterización en Base a
Propiedades Básicas y a Métodos de
Defuzzificación
En el Capítulo 3 se concluyeron tres aspectos:
a) la escasa influencia del operador de conjunción elegido,
b) los buenos resultados medios con los tres problemas de modelado difuso y
con la mayoría de los métodos de defuzzificación de los operadores de
implicación de la familia de las t-normas,
c) y el buen comportamiento de los métodos de defuzzificación que operan en
Modo B – FITA acompañados del grado de emparejamiento como valor de
importancia, y ocasionalmente algunos operadores de implicación concretos
que operan en el Modo A – FATI.
Estas conclusiones plantean dos líneas de análisis que son las desarrolladas en
este capítulo:
•
En primer lugar, se deducen una serie de propiedades básicas que cumplen
los operadores de implicación robustos, es decir, aquellos que ofrecen buenos
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
94
resultados combinados con un amplio grupo de métodos de defuzzificación e
independientemente de la aplicación donde se empleen.
•
En segundo lugar, utilizando las propiedades básicas desarrolladas en el
punto anterior, se realiza un estudio de las razones que originan que
determinados métodos de defuzzificación combinados con operadores de
implicación que no cumplen todas las propiedades básicas, ofrezcan buen
comportamiento. Esto, junto con un estudio de las propiedades básicas que
verifican las distintas familias de operadores de implicación, permitirá
concluir qué características deben tener los métodos de defuzzificación para
ser adecuados en combinación con los operadores de implicación de cada
familia.
4.1 Estudio de las Propiedades Básicas para la
Robustez
En esta sección se procederá a justificar en primer lugar, la necesidad de unas
propiedades básicas para los operadores de implicación. Para hallarlas ha sido
necesario el estudio de unos nuevos operadores de implicación que son introducidos
en este capítulo. El comportamiento de los SBRDs que utilizan estos operadores es
comprobado con una experimentación basada en tres problemas de modelado
difuso. Finalmente, y haciendo uso de los comportamientos observados en la
experimentación, se realiza un estudio que concluyen con la deducción de tres
propiedades básicas que garantizan un comportamiento robusto para los
operadores de implicación.
4.1.1 Por qué son necesarias unas Propiedades Básicas
Como punto de partida disponemos del hecho de que las t-normas son los
operadores de implicación que mejor comportamiento mostraron en el Capítulo 3.
Por otra parte las t-normas pertenecen a los operadores de implicación que
extienden la conjunción booleana. Por tanto, cabe preguntarse:
•
¿Es condición suficiente que un operador sea extensión de la conjunción
booleana para que sea un buen operador de implicación?
•
¿Sería necesario verificar alguna propiedad adicional?
•
¿Sería posible obtener un conjunto de propiedades básicas para que un
operador de implicación sea robusto?
Estudio de las Propiedades Básicas para la Robustez
95
Como avanzábamos anteriormente, para tratar de dar respuesta a estas
preguntas en este capítulo, vamos utilizar una nueva familia de operadores de
implicación pertenecientes a la familia de los que extienden la conjunción booleana.
Esta familia utilizada en la literatura especializada recibe el nombre de operadores
force-implication1 [DV95]. La siguiente sección se dedica a su descripción.
Con posterioridad, plantearemos una experimentación en la que participarán
entre otros los operadores force-implication, así como un conjunto de métodos de
defuzzificación. Finalmente, se responderán las tres cuestiones que se planteaban
anteriormente, en definitiva, se concluirán las tres propiedades básicas de los
operadores de implicación robustos.
4.1.2 Operadores Force-implication
Los operadores force-implication fueron introducidos para “combinar el propósito
de modelar el razonamiento humano de un modo más natural con la necesidad de
un operador de implicación” [DV95].
Hay dos familias de operadores force-implication dependiendo del modo en el
que estén construidos. Las dos subsecciones siguientes se dedican a ellos.
4.1.2.1 Operadores force-implication basados en operadores de
indistinguibilidad
Los operadores force-implication basados en operadores de indistinguibilidad se
construyen de la siguiente forma:
I (x,y) = T (x , E (x,y)),
donde T es una t-norma, y E es un operador de indistinguibilidad, el cual se define
así:
E = T’ (I’ (x ,y), I’ (y,x)),
siendo T’ una t-norma e I’ una función de implicación.
Hay tres tipos diferentes de operadores de indistinguibilidad dependiendo de la
t-norma empleada para definirlos [TV85]:
•
1
Relaciones de Similitud, cuando se emplea la t-norma del producto lógico
(mínimo):
Se ha preferido mantener el nombre en inglés “force-implication” ya que su traducción al castellano
como “implicación fuerte” podría inducir confusión con la traducción de “strong implication function”
como “funciones de implicación fuertes”.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
96
T’ (x,y) = Min (x,y).
•
Relaciones de Probabilidad, si la t-norma por la que se opta es la del
producto algebraico:
T’ (x,y) = x· y.
•
Relaciones de Semejanza, cuando se utiliza la t-norma del producto acotado
(o t-norma de Lukasiewicz):
T’ (x,y) = Max (0, x+y-1).
En la presente memoria se utilizarán los operadores de indistinguibilidad
introducidos en [TV85], los cuales pertenecen en su totalidad al grupo de las
Relaciones de Semejanza, ya que emplean para su formación la t-norma del
producto acotado. A continuación se detalla cada uno de ellos, utilizando en cada
caso el nombre de la función de implicación utilizada para construirla:
•
Operador de indistinguibilidad de Gödel:
1,
EGödel ( x , y ) =
Min( x , y ),
1,
y,
construido con I'Gödel (x, y) =
•
si x = y
,
en otro caso
si x ≤ y
.
en otro caso
Operador de indistinguibilidad de Goguen:
EGoguen (x, y) = Min (1,
Min (x, y)
Min (x, y)
)=
,
Max (y, x)
Max (x, y)
si y ≤ x
1,
.
y, en otro caso
construido con I' Goguen(x, y) =
•
Operador de indistinguibilidad de Lukasiewicz:
ELukasiewicz (x,y) = 1-|x-y|,
construido con I’Lukasiewicz (x,y) = Min (1, 1-x+y).
•
Operador de indistinguibilidad de Mizumoto:
EMizumoto (x,y) = 1-x-y + 2· x· y,
construido con I’Mizumoto (x,y) = 1-x + x· y.
Estudio de las Propiedades Básicas para la Robustez
•
97
Operador de indistinguibilidad de Diene:
EDiene = Max {0, Max (1-x,y) + Max (1-y,x)-1},
construido con I’Diene (x,y) = Max (1-x, y).
Los operadores force-implication que se utilizarán en esta memoria están
construidos con los cinco operadores de indistinguibilidad citados y tres t-normas:
productos lógico, algebraico y acotado. Sus expresiones son las siguientes
•
Utilizando el operador de indistinguibilidad de Gödel y la t-norma del
producto lógico:
I16 (x,y) = Min (x,EGödel (x,y)).
•
Utilizando el operador de indistinguibilidad de Goguen y la t-norma del
producto lógico:
I17 (x,y) = Min (x,EGoguen (x,y)).
•
Utilizando el operador de indistinguibilidad de Lukasiewicz y la t-norma del
producto lógico:
I18 (x,y) = Min (x,ELukasiewicz (x,y)).
•
Utilizando el operador de indistinguibilidad de Mizumoto y la t-norma del
producto lógico:
I19 (x,y) = Min (x,EMizumoto (x,y)).
•
Utilizando el operador de indistinguibilidad de Diene y la t-norma del
producto lógico:
I20 (x,y) = Min (x,EDiene (x,y)).
•
Utilizando el operador de indistinguibilidad de Gödel y la t-norma del
producto algebraico:
I21 (x,y) = x ⋅ EGödel (x,y).
•
Utilizando el operador de indistinguibilidad de Goguen y la t-norma del
producto algebraico:
I22 (x,y) = x ⋅ EGoguen (x,y).
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
98
•
Utilizando el operador de indistinguibilidad de Lukasiewicz y la t-norma del
producto algebraico:
I23 (x,y) = x ⋅ ELukasiewicz (x,y).
•
Utilizando el operador de indistinguibilidad de Mizumoto y la t-norma del
producto algebraico:
I24 (x,y) = x ⋅ EMizumoto (x,y).
•
Utilizando el operador de indistinguibilidad de Diene y la t-norma del
producto algebraico:
I25 (x,y) = x ⋅ EDiene (x,y).
•
Utilizando el operador de indistinguibilidad de Gödel y la t-norma del
producto acotado (o t-norma de Lukasiewicz):
I26 (x,y) = Max (x + EGödel (x,y) - 1, 0).
•
Utilizando el operador de indistinguibilidad de Goguen y la t-norma del
producto acotado:
I27 (x,y) = Max (x + EGoguen (x,y) - 1, 0).
•
Utilizando el operador de indistinguibilidad de Lukasiewicz y la t-norma del
producto acotado:
I28 (x,y) = Max (x + ELukasiewicz (x,y) - 1, 0).
•
Utilizando el operador de indistinguibilidad de Mizumoto y la t-norma del
producto acotado:
I29 (x,y) = Max (x + EMizumoto (x,y) - 1, 0).
•
Utilizando el operador de indistinguibilidad de Diene y la t-norma del
producto acotado:
I30 (x,y) = Max (x + EDiene (x,y) - 1, 0).
Las representaciones gráficas de los conjuntos difusos trapezoidales inferidos a
partir de estos operadores de implicación pueden encontrarse en el Apéndice I de la
presente memoria.
Estudio de las Propiedades Básicas para la Robustez
99
4.1.2.2 Operadores force-implication basados en distancias
Los operadores force-implication basados en distancias se construyen según la
siguiente expresión:
I (x,y) = T (x , 1 - d (x ,y)),
donde T es una t-norma y d una distancia.
En la presente memoria se emplearán los siguientes operadores forceimplication basados en distancias:
•
Utilizando la t-norma del producto lógico y la distancia d=|x-y|:
I31 (x,y) = Min (x, 1 -|x-y| ).
•
Utilizando la t-norma del producto algebraico y la distancia d=|x-y|:
I32 (x,y) = x ⋅ (1-|x-y| ).
•
Utilizando la t-norma del producto acotado y la distancia d=|x-y|:
I33 (x,y) = Max (x -|x-y|, 0).
•
Utilizando la t-norma del producto lógico y la distancia d=|x-y|2 :
I34 (x,y) = Min (x, 1-|x-y|2).
•
Utilizando la t-norma del producto algebraico y la distancia d=|x-y|2 :
I35 (x,y) = x ⋅ (1-|x-y|2 ).
•
Utilizando la t-norma del producto acotado y la distancia d=|x-y|2 :
I36 (x,y) = Max (x -|x-y|2, 0).
En el Apéndice I de la presente memoria se encuentran las representaciones
gráficas de los consecuentes trapezoidales inferidos por cada una de estos seis
operadores de implicación.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
100
4.1.3 Estudio Experimental
En esta sección se plantea la experimentación llevada a cabo en el presente
capítulo que tiene como objetivo observar el comportamiento de los operadores
force-implication.
La experimentación va a consistir en construir distintos SBRDs como en el
capítulo anterior, combinando una selección de operadores de implicación y
métodos de defuzzificación. Estos SBRDs se aplicarán a tres problemas de
modelado difuso: el de dos superficies tridimensionales F1 y F2 y el problema de la
longitud real de la línea de baja tensión en núcleos rurales, E1. Los detalles sobre
estos problemas pueden encontrarse en el Apéndice II de la presente memoria.
4.1.3.1 Selección de Operadores de Conjunción e Implicación y
Métodos de Defuzzificación
En esta subsección se detallan y justifican los operadores de conjunción e
implicación y los métodos de defuzzificación empleados para la experimentación del
presente capítulo.
Dado que una de las conclusiones obtenidas en el Capítulo 3 fue la baja
influencia del operador de conjunción, en la experimentación de este capítulo se
llevará a cabo con un solo operador, la t-norma del producto lógico (mínimo), por
ser el más ampliamente utilizado.
En cuanto a los operadores de implicación, a continuación se citan los
seleccionados agrupados por familias según la clasificación de la Sección 1.2.3.2.
•
Los que extienden la implicación booleana, entre los cuales se encuentran
las funciones de implicación difusas y algunos otros operadores. En la
Sección 1.2.3.2 se enunciaron sus propiedades, subfamilias y ejemplos
comunes. En la experimentación de este capítulo hemos utilizado nueve
operadores de esta familia, de los cuales seis son funciones de implicación (I1
(Diene), I2 (Dubois-Prade), I3 (Mizumoto), I4 (Gödel), I5 (Goguen) e I6
(Lukasiewicz) del Apéndice I de la memoria), y los tres restantes (I7 (EarlyZadeh), I8 (Gaines) e I9) han sido elegidos en base a su difusión en la
literatura. Véase el Apéndice I de la memoria para obtener más detalles
sobre los operadores concretos.
•
Los que extienden la conjunción booleana, dentro de los cuales las t-normas
son los operadores más conocidos. La Sección 1.2.3.2 trata sobre esta familia
de operadores. Emplearemos las seis t-normas que hemos utilizado en el
capítulo anterior (I10 (p. lógico), I11 (p. Hamacher), I12 (p. algebraico), I13 (p.
Estudio de las Propiedades Básicas para la Robustez
101
Einstein), I14 (p. acotado) e I15 (p. drástico)) y veintiún operadores
pertenecientes a la familia de los operadores force-implication (I16 a I36 ).
•
Operadores que no pertenecen a ninguna de las dos familias anteriormente
citadas. En esta memoria se ha elegido sólo un operador de este tipo (I37),
pues en estudios previos (no mostrados en esta memoria) donde se
emplearon veintitrés de este tipo seleccionados de [KKS85, CK89, CPK92],
se observó que el comportamiento no es bueno. El elegido es el que mejor
comportamiento mostró de todos ellos en dichos estudios.
En cuanto a los métodos de defuzzificación, para cada uno de los dos posibles
modos de actuar presentados en la Sección 1.2.4, se han seleccionado los siguientes:
•
Cuatro métodos que trabajan en el Modo A – FATI (presentado en la Sección
1.2.4.1) que se relacionan en la Tabla 4.1 y sobre los que se puede ampliar
información en el Apéndice I de la presente memoria.
•
Entre los del Modo B – FITA (presentado en la Sección 1.2.4.2) se han
elegido seis, los cuales se relacionan también en la Tabla 4.1 y cuyas
expresiones pueden consultarse en el Apéndice I de la presente memoria.
Los métodos D21, D24, D27 y D30 se han elegido por verificar las conclusiones
del Capítulo 3 relativas a los métodos de defuzzificación más adecuados y
que consistían en la conveniencia de utilizar el Punto de Máximo Valor como
valor característico y el grado de emparejamiento como grado de
importancia. Adicionalmente, se han añadido D31 y D33 como en el Capítulo
3, el primero por su composición particular y el segundo por ser
ampliamente utilizado en la literatura.
D1 MOM con agregación MAR
Modo A D2 CG con agregación MAR
– FATI D10 MOM con agregación FLR
D11 CG con agregación FLR
D21 CG ponderado por el grado de emparejamiento
D24 PMV ponderado por el grado de emparejamiento
Modo B D27 CG del conjunto difuso de mayor grado de emparejamiento
– FITA D30 PMV del conjunto difuso de mayor grado de emparejamiento
D31 Media de los Máximos Valores
D33 Centro de Sumas
Tabla 4.1. Métodos de defuzzificación considerados en el presente capítulo
4.1.3.2 Resultados Obtenidos y Análisis
Con objeto de evaluar los distintos SBRDs diseñados, se han utilizado las
medidas introducidas en la Sección 3.3 del capítulo anterior, basadas en el cálculo
del Error Cuadrático Medio, su Grado de Adaptación asociado (GA_ECM), y las
102
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
definiciones concretas para operadores de implicación de la Media de los Grados de
Adaptación (MGA_I) y del Promedio de las Medias de los Grados de Adaptación
(PMGA_I).
En las Tablas 4.19, 4.20 y 4.21, situadas en el Apéndice A del presente capítulo,
se pueden observar los GA_ECM de los SBRDs obtenidos con cada uno de los
problemas de modelado difuso. En ellas se han destacado en negrita los valores
máximos y en cursiva los mínimos. La Tabla 4.2 muestra los valores de la MGA_I
para cada aplicación y los valores del PMGA_I. La Tabla 4.3 contiene el valor del
GA_ECM con el mejor método de defuzzificación para todos los operadores de
implicación en cada uno de los tres problemas de modelado difuso.
La Tabla 4.4 presenta una media aritmética de los PMGA_I para las distintas
familias o clases de operadores de implicación (datos mostrados en la Tabla 4.2) de
acuerdo con la clasificación planteada en la Sección 4.1.3.1. Finalmente la Tabla
4.5 muestra el valor de la media aritmética de los GA_ECM para todos los
operadores de implicación con el mejor método de defuzzificación y en diferentes
aplicaciones (resultados obtenidos a partir de los datos mostrados en la Tabla 4.3),
de acuerdo con las familias de operadores.
Los resultados obtenidos para las tres aplicaciones muestran un
comportamiento homogéneo de los distintos operadores de implicación, como puede
apreciarse en los resultados de MGA_I de la Tabla 4.2.
Consideramos la medida PMGA_I como una buena medida para comprobar la
robustez en el sentido de “buen comportamiento para diferentes aplicaciones y en
combinación con distintos métodos de defuzzificación” de un operador de
implicación. Observando los comportamientos de las distintas familias de
operadores de implicación con respecto a esta medida, se pueden apreciar los
siguientes aspectos que se comentan a continuación.
A la vista de los resultados de la Tabla 4.4, los operadores de implicación tnorma, presentan claramente mejores resultados que las funciones de implicación.
La media aritmética de los PMGA_I obtenidos por las t-normas es el mejor, por lo
tanto, se puede decir que “las t-normas son operadores de implicación muy
robustos”.
Un segundo resultado claramente apreciable en la Tabla 4.4 es que las t-normas
presentan un valor considerablemente mejor que el otro grupo de operadores de su
familia (las que extienden la conjunción booleana), los operadores force-implication,
tanto si están basados en indistinguibilidades como en distancias.
En lo relativo a los operadores force-implication, si analizamos la media
aritmética de los PMGA en la Tabla 4.4, observamos que hay una apreciable
diferencia entre los que se basan en indistinguibilidades y los que se basan en
distancias a favor de las primeras (0.77290 frente a 0.69307).
Estudio de las Propiedades Básicas para la Robustez
103
MGA_IF1 MGA_IF2 MGA_IE1 PMGA_I
GA_ECMF1
Extensiones de la Implicación Booleana
Funciones de Implicación
Extensiones de la Implicación Booleana
Funciones de Implicación
0.64264
0.59397
0.61668
0.61776
I1
0.67831
0.62922
0.66487
0.65747
I2
0.65713
0.60688
0.64359
0.63587
I3
0.68814
0.69818
0.74340
0.70991
I4
0.68827
0.69826
0.74390
0.71014
I5
0.66625
0.61664
0.64830
0.64373
I6
Otras Generalizaciones de la Implicación Booleana
0.99756(D24)
1.00000(D24)
0.99977(D24)
I1
0.99112(D24)
0.98935(D24)
0.99518(D24)
I2
0.99756(D24)
1.00000(D24)
0.99977(D24)
I3
0.99557(D24)
0.99742(D24)
0.99769(D24)
I4
0.99557(D24)
0.99742(D24)
0.99769(D24)
I5
0.99557(D24)
0.99742(D24)
0.99769(D24)
I6
Otras Generalizaciones de la Implicación Booleana
0.61552
0.56316
0.56987
0.58285
0.80754
0.78696
0.80592
0.80014
0.80360
0.78885
0.79671
0.79638
Extensiones de la Conjunción Booleana
T-normas
0.93323
0.95886
0.92850
I10 0.89342
0.93166
0.95862
0.92779
I11 0.89309
0.93282
0.95847
0.92844
I12 0.89404
0.89252
0.90665
0.89423
I13 0.88353
0.86421
0.90871
0.87918
I14 0.86463
0.97201
0.97518
0.97138
I15 0.96694
Op. Force-imp. basados en Op. Indistinguibilidad.
0.93323
0.95886
0.92850
I16 0.89342
0.93280
0.95838
0.92816
I17 0.89331
0.60739
0.61258
0.62616
I18 0.65851
0.59497
0.59794
0.61218
I19 0.64363
0.58538
0.54274
0.51105
0.54639
I20
0.97658
0.97323
0.97408
I21 0.97244
0.89204
0.90545
0.89384
I22 0.88402
0.67975
0.73144
0.70970
I23 0.71791
0.56680
0.56969
0.58397
I24 0.61544
0.50868
0.47524
0.51029
I25 0.54695
0.97490
0.97247
0.97281
I26 0.97106
0.86501
0.87359
0.87151
I27 0.87594
0.89615
0.93252
0.90118
I28 0.87486
0.73857
0.77271
0.76746
I29 0.79109
0.73850
0.77265
0.76730
I30 0.79075
Op. Force-imp. basados en Distancias
0.60739
0.61258
0.62616
I31 0.65851
0.67975
0.73144
0.70970
I32 0.71791
0.89615
0.93252
0.90118
I33 0.87486
0.49599
0.48061
0.51188
I34 0.55905
0.62599
0.63064
0.64138
I35 0.66750
0.74277
0.78690
0.76813
I36 0.77472
Otros Operadores de Implicación
0.78698
0.79260
0.79387
I37 0.80204
0.95141(D1,30) 0.95778(D1,30) 0.92789(D1,30)
0.99557(D21, 24) 0.99742(D21, 24) 0.99769(D21, 24)
0.99756(D24)
1.00000(D24)
0.99977(D24)
Extensiones de la Conjunción Booleana
T-normas
0.99742(D24)
0.99769(D24)
I10 0.99557(D24)
1.00000(D24)
0.99977(D24)
I11 0.99756(D24)
1.00000(D24)
0.99977(D24)
I12 0.99756(D24)
0.99701(D5)
0.99933(D21)
1.00000(D21)
I13
1.00000(D24)
0.99977(D24)
I14 0.99756(D24)
I15 0.99756(D21,24) 1.00000(D21,24) 0.99977(D21, 24)
Op. Force-imp. basados en Op. Indistinguibilidad
0.99742(D24)
0.99769(D24)
I16 0.99557(D24)
0.99495(D24)
0.99663(D24)
I17 0.99413(D24)
I18 0.95287(D10,30) 0.95850(D10,30) 0.92773(D10,30)
I19 0.94746(D10,30) 0.95083(D10,30) 0.92699(D10,30)
I20 0.94746(D10,30) 0.95083(D10,30) 0.92699(D10,30)
0.99742(D24)
0.99769(D24)
I21 0.99557(D24)
0.99881(D21)
0.99960(D24)
I22 0.99691(D21)
0.99742(D24)
0.99769(D24)
I23 0.99557(D24)
I24 0.94746(D10,30) 0.95083(D10,30) 0.92699(D10,30)
I25 0.94746(D10,30) 0.95083(D10,30) 0.92699(D10,30)
0.99742(D24)
0.99769(D24)
I26 0.99557(D24)
0.99575(D24)
0.99673(D24)
I27 0.99361(D24)
0.99742(D24)
0.99769(D24)
I28 0.99557(D24)
0.95324(D*)
0.95964(D*)
0.92789(D*)
I29
0.95199(D*)
0.95738(D*)
0.92775(D*)
I30
Op. Force-imp. basados en Distancias
I31 0.95287(D10,30) 0.95850(D10,30) 0.92773(D10,30)
0.99742(D24)
0.99769(D24)
I32 0.99557(D24)
0.99742(D24)
0.99769(D24)
I33 0.99557(D24)
I34 0.72484(D10,30) 0.67278(D10,30) 0.61359(D10,30)
I35 0.94750(D10,30) 0.95075(D10,30) 0.92770(D10,30)
0.99730(D24)
0.99909(D24)
I36 1.00000(D24)
Otros Operadores de Implicación
0.99742(D24)
0.99769(D24)
I37 0.99557(D24)
I7
I8
I9
Tabla 4.2.Media de Grados de Adaptación
y Promedio de Medias de los Grados de
Adaptación para cada op. de implicación
GA_ECMF2
GA_ECME1
I7
I8
I9
Tabla 4.3. Grados de Adaptación con el
mejor método de defuzzificación para un
operador de implicación (D*)=(D11,27,33)
104
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
Extensiones de Implicación Booleana
Funciones de Implicacion
Otros
S-Implic.
R-Implic. QM-Implic.
I8, I9
0.63871
0.68793
0.58285
0.79826
0.66332
0.69056
0.67694
Extensiones de Conjuncion Booleana
T-normas
Op.Force-imp.
Indist.
Distancia
0.77290
0.69307
0.92159
0.73299
0.82729
Otros
(I37)
0.79387
Tabla 4.4. Media aritmética del PMGA para las
diferentes familias de operadores de implicación
Extensiones de Implicacion Booleana
Funciones de Implicación
Otros
S-Implic.
R-Implic. QM-Implic.
I8, I9
0.99810
0.99769
0.92789
0.99873
0.99790
0.96331
0.97177
Extensiones de Conjunción Booleana
T-normas
Op.Force-imp.
Indist.
Distancia
0.97444
0.89872
0.99912
0.93658
0.96785
Otros
(I37)
0.99769
Tabla 4.5. Media aritmética del GA_ECM con
el mejor método de defuzzificación
Analizando los valores MGA_I y PMGA_I individuales de la Tabla 4.2, pueden
observarse comportamientos dispares entre los propios operadores forceimplication basados en relaciones de indistinguibilidad. Así, el peor valor es
0.51029 para el operador I25 en contraposición a los valores de I21, I22 y I26, por
ejemplo. Igual heterogeneidad se da en el comportamiento de las basadas en
distancias.
En definitiva, se podría concluir que los operadores force-implication muestran
un comportamiento irregular. Analizando los que muestran buen comportamiento,
se puede encontrar que los que provienen de las implicaciones de Gödel y Goguen
muestran buen funcionamiento, con valores superiores a 0.9, siendo todos los
demás sensiblemente peores salvo el I28. En el grupo de los basados en distancias,
sólo el I33 presenta buen comportamiento, de hecho, es el mismo operador que el I28.
Respecto a las funciones de implicación, los mejores comportamientos se
encuentran en las R-Implicaciones si bien sus resultados son muy inferiores a los
obtenidos por las t-normas.
En cuanto a los otros operadores de implicación que extienden la implicación
booleana, que fueron seleccionados por su importancia (I7 e I8) y por su mayor
precisión (I9) en estudios previos, no presentan buen comportamiento en
comparación con las t-normas. La QM-Implicación (I7) muestra el peor
comportamiento de la familia (Tablas 4.2 y 4.3). Los otros dos operadores muestran
mejor comportamiento que las funciones de implicación.
En el grupo de los otros operadores de implicación, el único representante en
este caso, I37, muestra mal comportamiento en media (Tabla 4.1), pero funciona
bien con el método de defuzzificación D24 (Tablas 4.3 y 4.5).
Estudio de las Propiedades Básicas para la Robustez
105
Las conclusiones anteriores se han realizado observando los grados de
adaptación medios, y los promedios de éstos, lo cual aporta información respecto a
la robustez. Si se observa la Tabla 4.3 y su promedio, la Tabla 4.5, las cuales se
realizan con el mejor resultado obtenido para un método de defuzzificación, se
aprecian buenos resultados para cualquier operador de implicación. Esto significa
buen comportamiento con un método de defuzzificación específico. Volveremos
sobre esta cualidad posteriormente. A continuación se van a analizar las causas por
las que los operadores de implicación presentan distinto grado de robustez.
4.1.4 Obtención de las Propiedades Básicas
En esta sección se va a encontrar respuesta a las tres preguntas que se
planteaban en la Sección 4.1.1 del presente capítulo:
1. ¿Es condición suficiente que un operador sea extensión de la conjunción
booleana para que sea un buen operador de implicación?
Según los resultados, no es suficiente. Se ha podido observar que algunos
operadores que verifican esa condición no presentan buen comportamiento.
Con relación a los operadores de implicación que extienden la conjunción
booleana, varios de ellos muestran buen comportamiento (t-normas y algunos
operadores force-implication), pero otros ofrecen claramente peores resultados que
las funciones de implicación y que el resto de operadores. Como se dijo con
anterioridad, el peor comportamiento corresponde al operador force-implication
basado en operador de indistinguibilidad, I25. Esto nos lleva a concluir que:
“el buen comportamiento mostrado por muchos de los operadores que extienden la
conjunción booleana en comparación con las funciones de implicación no es
debido sólo a esta característica”
2. ¿Sería necesario verificar alguna propiedad adicional?
Los operadores de la familia de los que extienden la implicación booleana,
inclusive las funciones de implicación, no presentan buen comportamiento en el
sentido de robustez. Por este motivo no se ha considerado añadir propiedades
adicionales procedentes de la familia de operadores que extienden la implicación
booleana. La búsqueda de alguna propiedad adicional se centra en la familia de los
que extienden la conjunción.
Se va a intentar analizar las características que originan el comportamiento
dispar entre los distintos operadores que extienden la conjunción booleana. Para
ello, se determinarán las características comunes entre los que mejor
comportamiento muestran, es decir, las t-normas y algunos operadores force-
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
106
implication, y los que peor comportamiento presentan, otros operadores forceimplication y las restantes familias de operadores (los que extienden a la
implicación booleana y los otros operadores). Dicho análisis es el siguiente:
•
Observando la expresión y la representación gráfica de los conjuntos difusos
inferidos, Bi’, cuando se utilizan los operadores force-implication I19, I20, I23,
I24, I25, I31, I32, I33, I34, I35 e I36 se encuentra que en todos ellos se da que I ( h ,
0 ) > 0 , siendo h el grado de emparejamiento entre los valores de las
variables de entrada y la parte antecedente de las reglas.
•
Los operadores force-implication basados en distancia cumplen que
t = 1 – d ( x , 0 ) > 0, y T ( h , t ) ≠ 0, con distintos tipos de t-normas y
valores de h y t.
•
En los operadores force-implication
indistinguibilidad se encuentra que:
basados
en
relaciones
de
E ( h , 0 ) = T’ ( I’ ( h , 0 ) , I’ ( 0 , h ) ) = T’ ( I’ ( h , 0 ) , 1 ) = I’ ( h , 0 ),
e
•
I’ ( h , 0 ) > 0 para algunas R-implicaciones, las cuales verifican
que ∃ c > 0 tal que T ( c , h ) = 0,
•
I’ ( h , 0 ) = 1 – h para las S-Implicaciones y QM-Implicaciones.
En todos estos casos, el comportamiento del SBRD cuando el soporte de
B’i incluye el soporte de Bi (el soporte de B’i es el dominio completo de la
variable) no es robusto. En cualquier caso, el comportamiento del SBRD
es distinto dependiendo del método de defuzzificación utilizado.
•
Por otro lado, estudiando los operadores force-implication I23, I24, I25, I26, I29,
e I32 se encuentra que I ( h , 1 ) = 0 , ∀ h ≤ ½ , (e incluso I ( h , y ) = 0, ∀ h ≤
½ en muchos casos). Esta característica provoca mal comportamiento en el
sentido de robustez. Las reglas con un grado de emparejamiento menor o
igual a ½ son ignoradas o mal defuzzificadas.
En lo relativo a I ( h , 0 ) > 0 , Mendel en [Men95] comentó que esta
característica “no tenía mucho sentido desde el punto de vista de la ingeniería” y
que “transgrede el sentido común de la ingeniería”. Llamó “implicaciones de la
ingeniería” a la t-norma del mínimo, el primer operador de implicación utilizado
por Mamdani en [Mam74], y el producto, propuesto más tarde como operador de
implicación en [Lar80].
Estudio de las Propiedades Básicas para la Robustez
107
En ese sentido, se llamarán “implicaciones robustas de la ingeniería” aquellos
operadores de implicación que presenten un comportamiento robusto en media con
diferentes aplicaciones y métodos de defuzzificación.
Se puede decir que los operadores force-implication son implicaciones robustas
de la ingeniería si verifican las dos propiedades siguientes:
a) I ( h , 0 ) = 0 , ∀ h ∈ [ 0 , 1 ],
b) I ( h , 1 ) > 0 , ∀ h ∈ ( 0 , 1 ].
Estas dos propiedades son verificadas obviamente por las t-normas.
3. ¿Sería posible obtener un conjunto de propiedades básicas para que un operador
de implicación sea robusto?
La primera propiedad extraída puede justificar el mal comportamiento de las
funciones de implicación ya que produce conjuntos difusos inferidos con soporte
ilimitado. Pero otras funciones de implicación como la de Gödel y la de Goguen no
cumplen lo anterior y sin embargo también tienen mal comportamiento, lo cual ha
de deberse a otras características de sus conjuntos difusos inferidos. La propiedad
que origina mal comportamiento en este caso es que cuando el grado de
emparejamiento es cero, I ( 0 , y ) > 0, ∀ y ∈ [ 0 , 1 ]. En concreto, en el caso de las
funciones de implicación, I ( 0 , y ) = 1, ∀ y∈ [ 0 , 1 ].
Por otro lado, tenemos que las condiciones
generalizaciones de la conjunción booleana son:
1.
2.
3.
4.
que
caracterizan
a
las
I ( 1 , 0 ) = 0,
I ( 1 , 1 ) = 1,
I ( 0 , 1 ) = 0, y
I ( 0 , 0 ) = 0.
La primera de estas condiciones está cubierta por la propiedad a) y la segunda
condición podría considerarse como complementaria a la propiedad b) para
conseguir robustez. De hecho, la segunda condición parece ser necesaria. Bajo este
razonamiento, tenemos la siguiente expresión como extensión de la propiedad b):
I ( h , 1 ) > 0, ∀ h ∈ ( 0 , 1 ) e I ( 1 , 1 ) = 1.
Las dos restantes (3 y 4) no son verificadas por las generalizaciones de la
implicación booleana (funciones de implicación y los operadores I7 e I8). Ambas de
hecho están en contradicción con I ( 0 , y ) > 0 , ∀ y ∈ [ 0 , 1 ], la cual es verificada
por estos operadores. Por tanto, la cuestión que debemos discutir es:
108
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
¿Será suficiente verificar
1. las propiedades a) y b), y
2. ser generalización de la conjunción booleana,
para obtener un operador de implicación robusto?
La respuesta es no. Es posible encontrar un operador que verifica todas las
propiedades anteriores pero que no presenta un comportamiento robusto:
1 ,
I (x, y) = 2
Min(x, y),
si x = 0 e y ∈ (0,1)
.
en otro caso
Este operador dispararía reglas con grado de emparejamiento 0,
aunque es generalización de la conjunción booleana. Por tanto, de
encontramos con el problema de reglas que se disparan con
emparejamiento igual a 0, incluso cuando son generalización de la
booleana.
( h = 0 ),
nuevo nos
grado de
conjunción
Se observa que tanto las t-normas como los operadores force-implication
robustos verifican una propiedad que generaliza las condiciones 3. I ( 0 , 1 ) = 0 y 4.
I ( 0 , 0 ) = 0, impidiendo inferir conjuntos difusos con el grado de emparejamiento
igual a 0, y es:
I ( 0 , y ) = 0, ∀ y ∈ [ 0 , 1 ].
De hecho, esta propiedad es opuesta a la condición verificada por las funciones
de implicación que provoca el comportamiento no robusto de las funciones de
implicación de Gödel y Goguen.
Así pues, se considera ésta como la tercera propiedad necesaria. Por tanto, las
tres propiedades que se considerarían básicas para conseguir operadores de
implicación robustos son:
a) I ( h , 0 ) = 0, ∀ h ∈ [ 0 , 1 ],
b) I ( h , 1 ) > 0, ∀ h ∈ ( 0 , 1 ) e I ( 1 , 1 ) = 1,
c) I ( 0 , y ) = 0, ∀ y ∈ [ 0 , 1 ].
Consultando la literatura especializada, la mayoría de los operadores de
implicación que se presentan no verifican estas tres propiedades básicas. Por tanto,
tales operadores de implicación no pueden ser considerados operadores robustos, y
no presentarán buen comportamiento con la mayoría de los métodos de
defuzzificación.
En la literatura especializada se pueden encontrar dos tendencias:
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
109
•
Mendel considera que las t-normas del mínimo (el primer operador de
implicación utilizado por Mamdani [Mam74]) y producto algebraico
(empleado en [Lar80]) son implicaciones de la ingeniería [Men95]. Estos
operadores efectivamente cumplen las tres propiedades básicas. Mendel
también añade que los operadores que cumplen la propiedad I ( h ,0 ) > 0
(soporte ilimitado) carecen de coherencia y violan el sentido común de la
ingeniería.
•
Por su parte, Dubois y Prade expresan su desacuerdo con Mendel diciendo
que aparentemente no se ha percatado de que existen operadores de
implicación genuinos que no tienen esta característica tales como la
implicación de Gödel y Goguen [DP96]. Estos autores postulan que
frecuentemente el uso adecuado de los operadores de implicación no es
comprendido en control difuso.
Las R-implicaciones de Gödel y Goguen, como se vio en la sección anterior, no
muestran comportamiento robusto pues sus resultados son malos en combinación
con varios de los métodos de defuzzificación. De hecho, estas dos R-implicaciones no
cumplen las propiedades básicas a) y c). En cualquier caso, en la experimentación
realizada se aprecia que cuando son utilizados en combinación con ciertos métodos
de defuzzificación sí se obtiene buen comportamiento.
Todo ello lleva a pensar que hay características en algunos métodos de
defuzzificación que, de algún modo, subsanan la no verificación de algunas
propiedades básicas por parte del operador de implicación. Para desvelar dichas
características, en la siguiente sección se estudia en primer lugar la influencia de
las propiedades básicas en el comportamiento de los operadores de implicación para
finalmente analizar la relación entre los métodos de defuzzificación y las
propiedades básicas, es decir, cómo un método de defuzzificación subsana la
ausencia de una propiedad básica concreta del operador de implicación.
4.2 Caracterización
de
los
Operadores
de
Implicación en base a las Propiedades Básicas
y a los Métodos de Defuzzificación
En esta sección, se justifica la necesidad de realizar una caracterización de los
operadores de implicación en función de las propiedades básicas y de los métodos
de defuzzificación. En primer lugar, debe aclararse que esta caracterización no
tiene un sentido matemático, sino que se refiere a una asociación entre operadores
de implicación que no verifican unas propiedades determinadas y métodos de
110
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
defuzzificación que subsanan esa deficiencia. Para llevar esta caracterización a la
práctica se comienza realizando un estudio de la influencia de las propiedades
básicas en el comportamiento de los operadores de implicación. Seguidamente,
conociendo la influencia de cada propiedad básica en el comportamiento del
operador de implicación, se analizará la relación entre las propiedades básicas y los
métodos de defuzzificación. En este análisis se deducen qué características
concretas de los métodos de defuzzificación son adecuadas en función de las
propiedades básicas que verifique el operador de implicación. Finalmente,
estudiando qué propiedades básicas cumplen las diferentes familias de operadores
de implicación, se procede a expresar una serie de resultados relativos a las
características que deben tener los métodos de defuzzificación para ser adecuados
con cada familia de operadores de implicación.
4.2.1 Por qué una Caracterización de los Operadores de
Implicación en base a las Propiedades Básicas y a los
Métodos de Defuzzificación
En la sección anterior se han deducido las propiedades básicas de robustez para
los operadores de implicación. Por tanto, si un operador cumple estas tres
propiedades es posible garantizar su robustez. Sin embargo, como se ha observado,
algunas combinaciones de operadores de implicación y métodos de defuzzificación
pueden presentar buen comportamiento aunque el operador de implicación no
verifique una o dos de estas propiedades básicas.
Deben existir por tanto algunas características en determinados métodos de
defuzzificación que permiten subsanar el hecho de que el operador de implicación
no verifique una propiedad básica determinada. Encontrar estas características de
los métodos de defuzzificación y su relación con las propiedades básicas permitiría
recomendar un perfil de los métodos de defuzzificación aptos para poder utilizar un
operador de implicación no robusto con buenos resultados. Además, sería posible,
estudiando las propiedades básicas que verifican las diferentes familias de
operadores de implicación, conocer qué características deben tener los métodos de
defuzzificación para ser aptos en su uso con cada una de esas familias.
4.2.2 Influencia de las Propiedades Básicas
En esta sección se va a describir cómo afecta la verificación de cada una de las
tres propiedades básicas de robustez obtenidas en la Sección 4.1.4 al
comportamiento del operador de implicación.
Siguiendo el proceso de obtención de estas propiedades se puede observar que
las propiedades a) y c) tienen diferente origen, pero sin embargo no son
independientes, pues tienen un punto en común: h = 0. Con objeto de contar con un
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
111
grupo de propiedades independientes entre sí para nuestro estudio, en adelante se
va a considerar la propiedad a) como la unión de las propiedades a1) y a2):
a1) I(h,0)=0, ∀ h∈(0,1],
a2) I(0,0)=0.
Esta división será necesaria en el estudio que posteriormente se va a mostrar
porque a1) y a2) se refieren a diferentes aspectos. La propiedad a1) hace referencia
al soporte ilimitado. Los operadores de implicación que la verifican limitan el
soporte del conjunto difuso inferido a la zona de definición del conjunto difuso del
consecuente de la regla.
Figura 4.1. Interpretación gráfica
de la propiedad básica a1)
Por otro lado, a2) se encuentra más próxima al significado de la propiedad c) que
se refiere al hecho de no inferir conjuntos difusos no nulos cuando el grado de
emparejamiento entre las entradas y los antecedentes de la regla es 0.
Los operadores de implicación que verifican la propiedad b) mantienen
información en el conjunto difuso inferido dentro de la zona modal del conjunto
difuso del consecuente de la regla cuando el grado de emparejamiento de dicha
regla es distinto de 0.
Figura 4.2. Interpretación gráfica
de la propiedad básica b)
Finalmente, el significado de la propiedad c) consiste en que los operadores de
implicación que la verifican infieren un conjunto difuso nulo cuando el grado de
emparejamiento de la regla es 0. Esto es, las reglas cuyos antecedentes no se
corresponden en absoluto con la entrada actual del sistema no aportan nada al
Interfaz de Defuzzificación.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
112
Figura 4.3. Interpretación gráfica
de la propiedad básica c)
Dado que a1) ∪ a2) = a) y que c) ⇒ a2), se tiene que a1) ∪ c) ⇒ a) ∪ c). Por esta
razón, se consideran las tres propiedades independientes a1), b) y c) para realizar
el estudio. La Tabla 4.6 muestra las posibles combinaciones de clases de operadores
de implicación que podrían darse en base a la verificación de las tres propiedades
comentadas.
Propiedades
Clase
∅
1
b)
2
No verifica
b),c)
c)
3
4
a1),c)
5
a1)
6
a1),b)
7
a1),b),c)
8
Tabla 4.6. Posibles combinaciones de clases de operadores de implicación
4.2.3 Relación entre las Propiedades Básicas y los Métodos
de Defuzzificación
En esta sección se va establecer una relación entre los métodos
defuzzificación y las propiedades básicas de robustez de los operadores
implicación. Esta relación va a consistir en estudiar la aplicabilidad
determinados métodos de defuzzificación cuando un operador de implicación
cumple determinada o determinadas propiedades básicas.
de
de
de
no
Desde el punto de vista de los métodos de defuzzificación se estudiará la
adecuación de los siguientes aspectos:
•
Modo A – FATI, tanto cuando se agrega con t-norma (Razonamiento
Aproximado de Mamdani (MAR)) como cuando se agrega con t-conorma
(Razonamiento Lógico Formal (FLR)).
•
Modo B – FITA.
•
Los valores de importancia grado de emparejamiento, área y altura.
•
Los valores característicos Centro de Gravedad (CG) y Punto de Máximo
Valor (PMV).
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
113
4.2.3.1 Análisis de las Clases de Operadores de Implicación
En esta sección se van a estudiar cada una de las clases de operadores de
implicación en función de la verificación de las propiedades básicas que aparecen
en la Tabla 4.6.
Clase 1: Se verifican todas las propiedades básicas:
La Figura 4.4 muestra un operador de implicación de esta clase.
Figura 4.4. (I10 Apéndice I)
Se trata de operadores de implicación que verifican las tres propiedades básicas.
Decimos que son operadores de implicación robustos porque pueden ser usados en
cualquier aplicación y en combinación con un amplio grupo de métodos de
defuzzificación.
Estos métodos de defuzzificación son aquellos que trabajan en Modo B – FITA
utilizando cualquier valor de importancia y cualquier valor característico, y
también los que trabajan en Modo A – FATI agregando con una t-conorma en el
papel de conectivo también (FLR).
La excepción al amplio grupo de métodos que trabajan correctamente en
combinación con los operadores de implicación que cumplen las tres propiedades
básicas son los que trabajan en Modo A – FATI agregando con una t-norma para
modelar el conectivo también (MAR). Cuando se agregan las superficies producidas
por operadores de implicación de esta clase mediante una t-norma, se pierde mucha
información.
Clase 2: No se verifica b) pero se verifican a) y c):
Esta situación es la que presentan los operadores de implicación de la Figura
4.5. y la Figura 4.6.
114
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
cuando h>1/2
cuando h<1/2
Figura 4.5. I27 (Apéndice I)
cuando h>1/2
cuando h<1/2
Figure 4.6. I30 (Apéndice I)
No hay preferencia en este caso entre los métodos de defuzzificación basados en
CG o MOM / PMV2.
En esta situación, el Modo A – FATI sólo funcionará bien para los casos
similares al de la Figura 4.6. En cambio, en el caso de la Figura 4.5 no lo hará
porque se agregan superficies muy irregulares. Por tanto no disponemos de
suficiente información para predecir el comportamiento cuando se utilice el Modo A
- FATI.
Los métodos de defuzzificación del Modo B – FITA podrían utilizarse en
combinación con el grado de emparejamiento como mejor grado de importancia
porque ni el área ni la altura proporcionarían garantías debido a lo irregular de las
superficies de los consecuentes inferidos.
Clase 3: No se verifican b) y c) pero se verifica a):
La Figura 4.7. muestra un operador de implicación con estas características.
Con “MOM / PMV” nos referimos a cualquiera de ellos, es decir, MOM en Modo A y
PMV en Modo B.
2
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
115
Figura 4.7. Min (I’(x,y), I’’(1-x,1-y)),
1, si x ≤ y
,
0 , en otro caso
I’(x,y)=
1, si x ≤ y
.
y , en otro caso
I’’(x,y)=
Los métodos de defuzzificación basados en el Modo A – FATI estarán fuera de
lugar con este tipo de operadores de implicación porque de nuevo se estarían
agregando superficies muy irregulares. En cambio, los métodos de defuzzificación
que trabajan en Modo B – FITA podrían funcionar.
Los valores de importancia área y altura no serían apropiados debido a lo
irregular de los conjuntos difusos inferidos. Sin embargo, el grado de
emparejamiento podría trabajar correctamente porque elimina el efecto de las
reglas disparadas con grado de emparejamiento igual a 0, originado al no
verificarse la propiedad c).
El CG no debería usarse al no verificarse la propiedad b). En lo que se refiere al
PMV, no hay tampoco garantías en cuanto a su utilización.
Clase 4: No se verifica c) pero se verifican a1) y b):
La Figura 4.8. pertenece a un conjunto difuso inferido con un operador de estas
características:
Figura 4.8. I8 (Apéndice I)
El operador de implicación del Figura 4.8. está definido como I ( x , y ) = 1 si x ≤ y
y 0 en otro caso. El problema principal de esta situación es que se disparan reglas
con grado de emparejamiento igual a 0. Esta característica hay que compensarla
116
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
con el Modo B – FITA en combinación con (principalmente ponderando por) el
grado de emparejamiento ya que los otros valores de importancia, área y altura, no
eliminarían dicho problema.
Los métodos de defuzzificación basados en el Modo A – FATI serán inapropiados
en tanto que no eliminan la contribución de las reglas que se han disparado con
grado de emparejamiento igual a 0.
El uso de los valores característicos CG o MOM será igualmente apropiado.
Clase 5: No se verifican a) y c) pero se verifica b):
La Figura 4.9. muestra un operador de implicación perteneciente a dicha clase
de operadores.
Figura 4.9. I1 (Apéndice I)
El Modo A – FATI agregando con una t-norma (MAR) y defuzzificando con el
MOM podría conseguir buenos resultados. Por otro lado, el CG no es apropiado por
el desplazamiento que produce el soporte ilimitado.
El Modo B – FITA será apropiado en combinación con el valor característico
PMV y el valor de importancia grado de emparejamiento para eliminar la
deficiencia de la propiedad c), que provoca la inferencia de conjuntos difusos cuando
el grado de emparejamiento de la regla es 0. El Modo B – FITA no será apropiado
en combinación con el CG porque este último será desplazado por efecto del soporte
ilimitado del conjunto difuso.
Clase 6: No se verifica a1) pero se verifican b) y c):
La Figura 4.10. corresponde a un operador con estas características.
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
117
Figura 4.10. I23 (Apéndice I)
El Modo A – FATI podría trabajar tanto agregando con una t-norma (MAR)
como con una t-conorma (FLR) cuando se defuzzifique con el MOM (el CG no es
apropiado por el soporte ilimitado). En este caso, y al contrario que en la clase
anterior, puede utilizarse la agregación con t-conorma (FLR) porque se verifica la
propiedad c) y por tanto no se inferirán conjuntos difusos procedentes de reglas con
grado de emparejamiento igual a 0, de modo que no es necesario anular ese efecto
agregando con una t-norma.
El Modo B – FITA funcionará bien especialmente cuando se use con métodos de
defuzzificación basados en el PMV. Los métodos de defuzzificación basados en el
CG sufrirán una desviación originada por el soporte ilimitado. El PMV puede ser
utilizado con buen comportamiento si se hace en combinación con el valor de
importancia grado de emparejamiento. Dependiendo de cada operador de
implicación concreto, el área y la altura podrían también funcionar correctamente.
Clase 7: No se verifican a) y b) pero sí c):
La Figura 4.11 muestra un operador de implicación de esta clase.
Si h ≥
3− 5
2
Si
3− 5
≥h
2
Figura 4.11. I36 (Apéndice I)
Debido a lo irregular de las superficies agregadas el Modo A – FATI no es
apropiado ni agregando al modo MAR ni al modo FLR.
En cuando al Modo B – FITA podría funcionar razonablemente junto con el PMV
pero no se puede afirmar rotundamente porque se da también la cancelación de los
puntos de mayor grado de pertenencia del consecuente inferido. Una vez más el
valor de importancia preferido debe ser el grado de emparejamiento si bien con
118
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
operadores de implicación específicos pueden también dar buen resultado el área y
la altura.
El CG no es apropiado por la desviación que le produce el soporte ilimitado.
Clase 8: No se verifican a), b) y c):
El operador de implicación del la Figura 4.12 presenta estas características.
Figura 4.12. I(x,y)=Max (0, x-y)
Nada es apropiado para ser utilizado en esta situación.
El Modo A – FATI es claramente inapropiado debido a lo irregular de las
superficies que se agregan y al soporte ilimitado.
En cuanto al Modo B – FITA, no disponemos de suficiente información. Por
supuesto el CG no es apropiado. El PMV podría ser útil dependiendo del operador
de implicación específico. El grado de emparejamiento podría ser el único valor de
importancia útil.
La Tabla 4.7 agrupa los resultados para todas las clases estudiados a lo largo de
toda esta sección, de acuerdo con la siguiente simbología:
X: funciona bien,
⊗: podría funcionar,
- : no funciona,
♦: no se dispone de suficiente información para tomar una decisión.
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
Cl.
1
2
3
4
5
6
7
8
No
Verifica
verifica
∅
b
b, c
c
a1, c
a1
a1, b
a1, b, c
a1, b, c
a1, c
a1
a1, b
b
b, c
c
∅
CG
MOM /
PMV
hi
grado
emp.
X
X
X
♦
♦
X
-
♦
♦
X
X
X
⊗
⊗
X
X
X
♦
♦
⊗
♦
si
área
li
altura
♦
♦
-
♦
♦
-
♦
♦
-
♦
♦
-
Modo
B
X
119
Modo A
(MAR)
-
(FLR)
X
♦
⊗
⊗
-
♦
-
⊗
⊗
X
X
X
⊗
♦
⊗
-
Tabla 4.7. Clases de operadores y avenencia con algunas
características de los métodos de defuzzificación
4.2.3.2 Consecuencias del Análisis de las Clases de Operadores
de Implicación
El análisis realizado en la sección anterior, donde se relacionan las propiedades
básicas que cumple el operador de implicación y la adecuación de los distintos
métodos de defuzzificación para tales circunstancias, permite extraer el siguiente
grupo de consecuencias:
1. Claramente, el grado de emparejamiento es el valor de importancia más
general en el sentido de ser el más apropiado en cada circunstancia.
2. El PMV es un valor característico más general que el CG porque es más
apropiado en la mayoría de los casos.
3. El Modo B – FITA es más general que el Modo A – FATI para el diseño del
Interfaz de Defuzzificación.
4. Los métodos de defuzzificación que trabajan en Modo B – FITA y usan el
valor característico PMV y el valor de importancia grado de emparejamiento
(como, por ejemplo, el PMV ponderado por el grado de emparejamiento o el
PMV del conjunto difuso de mayor grado de emparejamiento), pueden
subsanar la no verificación de cualquier propiedad básica individualmente o,
incluso, de un par de ellas.
5. El Modo A – FATI tiene dos maneras de agregar los conjuntos difusos
inferidos, MAR y FLR. Ninguna de ellas podría considerarse como más
genérica que la otra. El MAR es apropiado cuando la propiedad básica a1)
no se verifica o cuando no lo hacen las propiedades a) y c) a la vez. El FLR
es apropiado cuando todas las propiedades básicas se verifican o cuando la
propiedad básica a1) no se verifica.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
120
4.2.4 Caracterización de los Operadores de Implicación
En esta sección se estudiarán las distintas familias de operadores de implicación
para obtener un perfil de características de los métodos de defuzzificación que son
apropiados para cada una de ellas. Para ello se utilizarán las conclusiones de la
Sección 4.2.3.1 mostradas en la Tabla 4.7 y se ilustrará con los resultados de la
experimentación llevada a cabo en la Sección 4.1.3.
4.2.4.1 Métodos de defuzzificación adecuados para los operadores
de implicación t-norma
Como se ha visto en capítulos anteriores, una función T:[0,1]×[0,1]→[0,1] es una
t-norma sii∀x,y,z ∈ [0,1] verifica las siguientes propiedades [GQ91b]:
(1) Existencia de unidad 1: T(1,x)=x.
(2) Monotonía: Si x≤y entonces T(x,z) ≤T(y,z).
(3) Conmutatividad: T(x,y)=T(y,x).
(4) Asociatividad: T(x,Ty,z))=T(T(x,y),z).
(5) T(0,x)=0.
Por definición, las t-normas verifican las tres propiedades básicas. Por un lado,
a) se satisface debido a la verificación de las propiedades (3) y (5) mientras que c) se
satisface por (5) y finalmente b) lo hace por (1).
De modo que podemos concluir que por su propia definición las t-normas son
operadores de implicación robustos y que son válidos para ser usados en cualquier
aplicación y en combinación con un amplio grupo de métodos de defuzzificación
compuesto por:
•
Aquellos que trabajan en Modo B – FITA con cualquier valor de importancia
y valor característico.
•
Aquellos que trabajan en Modo A – FATI cuando se utiliza una t-conorma
para modelar el conectivo también (FLR), pero no cuando se utiliza una tnorma (MAR) porque se produce una pérdida de información en el proceso
de inferencia.
Resultado 1 (T-normas).
Si I es una T-norma entonces puede usarse con un amplio grupo de métodos de
defuzzificación que son:
i)
ii)
Aquellos que trabajan en Modo B – FITA.
Aquellos que trabajan en Modo A – FATI del tipo FLR.
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
121
La Tabla 4.8 muestra la proximidad entre los valores medios (PMGA) y los
valores máximos (GA_EM) de los grados de adaptación con el mejor método de
defuzzificación (Modo B – D24, Punto de Máximo Valor ponderado por el grado de
emparejamiento). Esto es una consecuencia del buen comportamiento general de la
familia de las t-normas.
PMGA_I
I10
I11
I12
I13
I14
I15
0.92850
0.92779
0.92844
0.89423
0.87918
0.97138
GA_ECMF1 GA_ECMF2 GA_ECME1
0.99557
0.99756
0.99756
0.99700
0.99756
0.99756
0.99742
1.00000
1.00000
0.99932
1.00000
1.00000
0.99769
0.99977
0.99977
0.99998
0.99977
0.99977
D
24
24
24
24
24
24
Tabla 4.8. PMGA y GA_ECM con el método de
defuzzificación D24 para los operadores de implicación t-norma
Las T-normas no presentan buen comportamiento con métodos de
defuzzificación que trabajen en Modo A – FATI agregando con t-normas el
conectivo también (MAR). La Tabla 4.9 muestra este aspecto en los casos de los
métodos de defuzzificación D1 (Media de los Máximos de los conjuntos difusos
individuales agregados con el mínimo) y D2 (Centro de Gravedad de los conjuntos
difusos individuales agregados con el mínimo).
PMGA_I
I10
I10
I11
I11
I12
I12
I13
I13
I14
I14
0.92850
0.92850
0.92779
0.92779
0.92844
0.92844
0.89423
0.89423
0.87918
0.87918
GA_ECMF1 GA_ECMF2 GA_ECME1
0.58416
0.58416
0.58380
0.58420
0.58384
0.58421
0.65992
0.43159
0.43159
0.43159
0.77250
0.77223
0.76466
0.77231
0.76601
0.77130
0.80176
0.35407
0.41883
0.41885
0.91597
0.91521
0.91059
0.91548
0.91178
0.91480
0.92868
0.91480
0.67289
0.67289
D
1
2
1
2
1
2
1
2
1
2
Tabla 4.9. PMGA y GA_ECM con los métodos de
defuzzificación D1 y D2 para los operadores de implicación t-norma
4.2.4.2 Métodos de defuzzificación adecuados para los operadores
force-implication
La definición de estos operadores se encuentra en el presente capítulo, en la
Sección 4.1.2. Ambas familias de operadores force-implication (tanto los construidos
en base a operadores de indistinguibilidad como los construidos en base a
distancias) verifican la propiedad c) I(0,y)=0, ∀ y ∈ [0,1]. En el primer grupo (los
que proceden del uso de operador de indistinguibilidad) esto se debe a que I(0,y) =
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
122
T(0,E(0,y)) = 0 y en el segundo (los que proceden de distancias) proviene de I(0,y)=
T(0,1-d(0,y)) = 0.
En el capítulo anterior se vio que hay operadores de implicación en la familia de
los operadores force-implication que verifican las tres propiedades básicas del
mismo modo que otros no verifican algunas propiedades, normalmente a) o b), ya
que c) se cumple por definición.
En las siguientes subsecciones se van a estudiar las cuatro posibilidades que
resultan de la combinación de verificar estas propiedades:
Métodos de defuzzificación adecuados para los operadores forceimplication que verifican a), b) y c)
Los operadores force-implication que verifican las tres propiedades básicas son
operadores robustos. Así pues, pueden utilizarse con un amplio grupo de métodos
de defuzzificación del mismo modo que los operadores de implicación t-norma.
Resultado 2 (Operadores force-implication que verifican las propiedades
básicas a), b) y c)).
Si I es un operador force-implication que verifica las propiedades básicas a),
b) y c) entonces puede utilizarse con un amplio grupo de métodos de
defuzzificación que son:
i)
ii)
Aquellos que trabajan en Modo B – FITA.
Aquellos que trabajan en Modo A – FATI del tipo FLR.
Como en la situación estudiada en la subsección anterior para los operadores de
implicación t-norma, la Tabla 4.10 muestra varios operadores con estas
características. Puede apreciarse la proximidad entre los valores medios y máximos
con el mejor método de defuzzificación como consecuencia de los buenos resultados
obtenidos por este grupo de operadores de implicación en combinación con un
amplio grupo de métodos de defuzzificación.
I16
I17
I21
PMGA_I
0.92850
0.92816
0.97408
GA_ECMF1 GA_ECMF2 GA_ECME1 D
0.99557
0.99742
0.99769
24
0.99413
0.99495
0.99663
24
0.99557
0.99742
0.99769
24
Tabla 4.10. PMGA y GA_ECM con el método de defuzzificación D24
para los operadores force-implication que verifican a), b) y c)
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
123
Métodos de defuzzificación adecuados para los operadores forceimplication que no verifican b)
Con los resultados obtenidos en la Sección 4.2.3.1, los operadores que verifican
las propiedades a) y c) pero no b) trabajarán bien con métodos de defuzzificación
que operen en Modo B – FITA y especialmente con aquellos que utilicen el grado de
emparejamiento como valor de importancia.
Resultado 3 (Operadores force-implication que verifican las propiedades
básicas a) y c) pero no b).
Si I es un operador force-implication que verifica las propiedades básicas a) y
c) pero no b), entonces los métodos de defuzzificación más apropiados para ser
utilizados en combinación con él son aquellos que trabajan en Modo B – FITA
empleando el grado de emparejamiento como valor de importancia.
La Tabla 4.11 muestra dos operadores de este tipo. La gran diferencia entre los
valores del PMGA y del GA_ECM resaltan la importancia de la elección del método
de defuzzificación. Los mejores resultados de GA_ECM para la Tabla 4.11 se
obtienen con el método de defuzzificación D24 (PMV ponderado por el grado de
emparejamiento).
I31
I32
PMGA_I
0.62616
0.70970
GA_ECMF1
0.83144
0.99557
GA_ECF2
GA_ECME1
D
0.81301
0.99742
0.79201
0.99769
24
24
Tabla 4.11. PMGA y GA_ECM con el método de defuzzificación D24
para los operadores force-implication que verifican a) y c) pero no b)
Métodos de defuzzificación adecuados para los operadores forceimplication que no verifican a1)
Hay un grupo de operadores force-implication que verifican las propiedades
básicas b) y c) pero no a1).
Así, con los resultados de la Sección 4.2.3.1, los métodos de defuzzificación
apropiados en esta situación son:
•
Los del Modo A – FATI que utilizan el MOM en ambos casos : MAR y FLR.
•
Los del Modo B – FITA que se basan predominantemente en el grado de
emparejamiento como valor de importancia y en el PMV como valor
característico.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
124
Resultado 4 (Operadores force-implication que verifican las propiedades
básicas b) y c) pero no a1)).
Si I es un operador force-implication que verifica las propiedades básicas b) y
c) pero no a1) entonces los métodos de defuzzificación más apropiados son los
siguientes:
i)
ii)
Aquellos que trabajan en Modo A – FATI utilizando el MOM, tanto en el
caso MAR como FLR.
Aquellos que trabajan en Modo B – FITA, con el grado de
emparejamiento como valor de importancia y el PMV como valor
característico.
En la Tabla 4.12, se puede observar la gran disparidad entre los valores medios
PMGA y los valores obtenidos en combinación con el mejor método de
defuzzificación GA_ECM. De un modo acentuado, los métodos de defuzzificación
D10 (MOM de los conjuntos difusos individuales agregados con el máximo como
conectivo también) y D30 (PMV del conjunto difuso con mayor grado de
emparejamiento) muestran muy claramente un buen comportamiento.
PMGA_I
I18
I19
I20
0.62616
0.61218
0.54639
GA_ECMF1 GA_ECMF2 GA_ECME1
0.95287
0.94746
0.94746
0.95850
0.95083
0.95083
0.92773
0.92699
0.92699
D
10,30
10,30
10,30
Tabla 4.12. PMGA y GA_ECM con los métodos de defuzzificación D10 y D30
para los operadores force-implication que verifican b) y c) pero no a1)
Métodos de defuzzificación adecuados para los operadores forceimplication que no verifican a1) ni b)
En la familia de los operadores force-implication pueden encontrarse también
operadores que sólo verifican la propiedad c).
En este caso, como se mostró en la Sección 4.2.3.1,
los métodos de
defuzzificación más apropiados son los que trabajen en Modo B – FITA utilizando
el grado de emparejamiento como valor de importancia y el PMV como valor
característico. Otros valores de importancia así como el Modo A – FATI podrían
utilizarse con el MOM dependiendo del operador de implicación específico de que se
trate.
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
125
Resultado 5 (Operadores force-implication que verifican la propiedad
básica c) pero no a1) ni b)).
Si I es un operador force-implication que verifica sólo la propiedad básica c),
pero no a1) ni b), entonces los métodos de defuzzificación más apropiados son
aquellos que trabajan en Modo B – FITA utilizando el grado de emparejamiento
como valor de importancia y el PMV como valor característico.
En la Tabla 4.13, podemos ver la gran diferencia que existe entre el grado medio,
PMGA, y el grado de adaptación obtenido con el mejor método de defuzzificación,
D24 (Punto de Máximo Valor ponderado por el grado de emparejamiento).
PMGA_I
I36
0.76813
GA_ECMF1 GA_ECMF2 GA_ECME1
1.00000
0.99730
0.99909
D
24
Tabla 4.13. PMGA y GA_ECM con el método de defuzzificación D24
para los operadores force-implication que verifican c) pero no a1) ni b)
4.2.4.3 Métodos de defuzzificación adecuados para las funciones
de implicación
Por la propia definición, la propiedad b) es verificada por estos operadores
mientras que la propiedad c) no lo es. No podemos afirmar nada genéricamente
sobre la propiedad a1).
Pormenorizamos el estudio para cada una de las familias de las funciones de
implicación [TV85,Tri97] :
Métodos de defuzzificación adecuados para las S-Implicaciones
Las S-Implicaciones corresponden con la definición de implicación en Lógica
Booleana: A→B=¬A∨B. Presentan la forma: I(x,y)=S(N(a),b), siendo S una tconorma y N la función de negación.
Las S-Implicaciones no verifican propiedades básicas adicionales a las
verificadas por las funciones de implicación en general. Esto es, las S-Implicaciones
sólo verifican la propiedad básica b), pero no las propiedades básicas a) y c).
En la Sección 4.2.3.1 se estudió que en tal situación los métodos de
defuzzificación apropiados son:
•
Predominantemente aquellos que trabajan en Modo B – FITA con el grado
de emparejamiento como valor de importancia y el PMV como valor
característico.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
126
•
Aquellos que trabajan en Modo A – FATI agregando con una t-norma (MAR)
y defuzzificando con el MOM.
Resultado 6 (S-Implicaciones).
Si I es una S-Implicación entonces los métodos de defuzzificación más
apropiados son los siguientes:
i)
ii)
Modo B – FITA con el grado de emparejamiento como valor de
importancia y el PMV como valor característico.
Modo A – FATI agregando con una t-norma (MAR) y defuzzificando con el
MOM.
La Tabla 4.14 muestra el buen comportamiento de las S-Implicaciones en
combinación con los métodos de defuzzificación PMV ponderado por el grado de
emparejamiento (D24) y MOM del conjunto difuso agregado con el mínimo como
conectivo también (D1), frente al mal comportamiento en promedio.
I1
I1
I2
I2
I3
I3
I6
I6
PMGA_I
0.61776
0.61776
0.65747
0.65747
0.63587
0.63587
0.64383
0.64383
GA_ECMF1 GA_ECMF2 GA_ECME1
0.95150
0.95679
0.92783
0.99756
1.00000
0.99977
0.96642
0.96365
0.93683
0.99112
0.98935
0.99518
0.97448
0.96910
0.93591
0.99756
1.00000
0.99977
0.97529
0.97022
0.93647
0.99557
0.99742
0.99769
D
1
24
1
24
1
24
1
24
Tabla 4.14. PMGA y GA_ECM con los métodos de defuzzificación D1 y D24
para las funciones de implicación de la familia de las S-Implicaciones
Métodos de defuzzificación apropiados para las R-Implicaciones
Se obtienen por residuación de una t-norma continua T de la forma:
I(x,y)=Sup{c:c∈[0,1]/T(c,x)≤ y}.
La propiedad básica b) se verifica por definición de función de implicación.
Además, aquellas R-Implicaciones obtenidas por residuación de t-normas positivas2
verifican la propiedad básica a1). Por tanto, las R-Implicaciones son funciones de
implicación que, dependiendo de la positividad de la t-norma con la se han
obtenido, verifican:
Son consideradas t-normas positivas aquellas que verifican T(x,y)=0 ⇒ x=0 ó y=0 esto es,
el homomorfismo de la t-norma del producto, la t-norma del mínimo y aquellas construidas
como suma ordinal de una colección contable de homomorfismos de la t-norma del producto.
2
Caracterización de los Operadores de Implicación en base a las Propiedades Básicas y a los Métodos...
127
•
La propiedad b) pero no la a1) ni la c). Este grupo tiene el mismo
comportamiento que las S-Implicaciones, o
•
Las propiedades a1) y b) pero no la c). El defecto de la propiedad básica c)
es subsanado por los métodos de defuzzificación que trabajan en Modo B –
FITA utilizando el CG y el PMV como valores característicos combinados
con el grado de emparejamiento como valor de importancia.
Resultado 7 (R-Implicaciones).
Si I es una R-Implicación, entonces los métodos de defuzzificación más
apropiados con los siguientes:
i)
ii)
Si la R-Implicación ha sido obtenida mediante residuación de una tnorma no positiva, aquellos citados en el Resultado 6.
Si la R-Implicación ha sido obtenida mediante la residuación de una tnorma positiva, aquellos que trabajen en Modo B – FITA con el grado de
emparejamiento como valor de importancia.
En nuestro estudio, la implicación de Lukasiewicz (I6) pertenece al grupo de las
R-Implicaciones que no han sido obtenidas por residuación de una t-norma
positiva. Los métodos de defuzzificación apropiados para la implicación de
Lukasiewicz son los mismos que para las S-Implicaciones, D1 (Media de los
Máximos agregando con mínimo como conectivo también) y D24 (Punto de Máximo
Valor ponderado por el grado de emparejamiento). Por otro lado, las RImplicaciones de Gödel (I4) y Goguen (I5) han sido obtenidas por residuación de una
t-norma positiva y, por tanto, el método de defuzzificación apropiado es el D24. La
Tabla 4.15 muestra el buen comportamiento de la defuzzificación con estos métodos
en relación con la media de todos los métodos de defuzzificación.
PMGA_I
I4
I5
I6
I6
0.70991
0.71014
0.64373
0.64373
GA_ECMF1
0.99557
0.99557
0.97529
0.99557
GA_ECF2
0.99742
0.99742
0.97022
0.99742
GA_ECME1 D
0.99769
24
0.99769
24
0.93647
1
0.99769
24
Tabla 4.15. PMGA y GA_ECM con los métodos de defuzzificación D1 y D24
para las funciones de implicación de la familia de las R-Implicaciones
4.2.4.4 Métodos de defuzzificación
operadores de implicación
adecuados
para
otros
En las secciones precedentes hemos analizado las familias de operadores de
implicación más importantes, pero existe también un grupo de operadores de
implicación que no pertenece a ninguna de estas familias.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
128
El modo de operar para determinar qué métodos de defuzzificación pueden ser
utilizados consiste, en este caso, en analizar qué propiedades básicas verifica el
operador específico y, entonces, determinar el método de defuzzificación apropiado
a la vista de la información recopilada en las Tabla 4.6 y 4.7.
A modo de ilustración de cómo operar, en el Apéndice I de la memoria se
presenta un grupo de operadores de implicación (I7, I8, I9, e I37) que no pertenecen a
ninguna de las familias de operadores bien conocidas. A continuación, siguiendo la
filosofía comentada, se van a estudiar cada uno de ellos.
Métodos de defuzzificación apropiados para el operador de Implicación
de Early-Zadeh (I7)
Verifica la propiedad básica b) pero no verifica las propiedades básicas a) ni b),
por lo que pertenece a la clase 5 y por ello podrá operar con buenos resultados en
combinación con los siguientes métodos de defuzzificación:
•
Podría trabajar con el Modo A – FATI agregando con una t-norma (MAR) y
defuzzificando con el MOM.
•
Funcionaría correctamente con el Modo B – FITA usado con el PMV y el
grado de emparejamiento.
Estos métodos de defuzzificación son los del Modo A – FATI, Media del Máximo
del conjunto difuso agregado con el mínimo como conectivo también, (D1), y el Modo
B – FITA, Punto de Máximo Valor del conjunto difuso de mayor grado de
emparejamiento (D16). La Tabla 4.16, muestra las fuertes diferencias que existen
entre los valores medios (PMGA_I) obtenidos con todos los métodos y los valores
obtenidos con los mejores, los citados anteriormente.
PMGA_I
I7
I7
0.58285
0.58285
GA_ECMF1 GA_ECMF2 GA_ECME1
0.95141
0.95141
0.95778
0.95778
0.92789
0.92789
D
1
30
Tabla 4.16. PMGA y GA_ECM con los métodos de
defuzzificación D1 y D30 para el operador de implicación I7
Métodos de defuzzificación adecuados con los operadores de implicación
de Gaines (I8) e I9
Ambos verifican las propiedades básicas a1) y b) pero no la c). De este modo,
pertenecen a la clase número 4 y los métodos de defuzzificación apropiados son los
que trabajan en Modo B – FITA utilizando el grado de emparejamiento como valor
de importancia (especialmente aquellos basados en la ponderación) para compensar
Conclusiones
129
la acción de las reglas disparadas con grado de emparejamiento) igual a 0. Tanto el
el CG y el PMV mostrarán buen comportamiento.
Estos métodos son, por ejemplo, el CG ponderado por el grado de
emparejamiento CG (D21) y el PMV ponderado por el grado de emparejamiento
(D24). La Tabla 4.17 muestra sus valores.
PMGA_I
I8
I9
I9
0.80014
0.79638
0.79638
GA_ECMF1 GA_ECMF2 GA_ECME1
0.99557
0.99438
0.99756
0.99742
0.99522
1.00000
0.99769
0.99719
0.99977
D
21,24
21
24
Tabla 4.17. PMGA y GA_ECM con los métodos de
defuzzificación D21 y D24 para los operadores de implicación I8 y I9
Métodos de defuzzificación adecuados con el operador de Implicación I37
Finalmente, este operador no verifica ninguna de las propiedades básicas. Por
tanto, no hay métodos de defuzzificación apropiados para ser utilizados en esta
situación. Dependiendo del operador específico, el defuzzificador PMV ponderado
por el grado de emparejamiento (Modo B – FITA) podría funcionar.
La Tabla 4.18 muestra los buenos resultados para este operador de implicación
en combinación el método de defuzzificación anteriormente citado.
PMGA_I
I37
0.79387
GA_ECMF1 GA_ECMF2 GA_ECME1
0.99557
0.99742
0.99769
D
24
Tabla 4.18. PMGA y GA_ECM con el métodos de
defuzzificación D24 para el operador de implicación I37
4.3 Conclusiones
En este capítulo nos propusimos estudiar el perfil de los operadores de
implicación robustos así como realizar un estudio de la adecuación de los métodos
de defuzzificación para trabajar en combinación con los distintos operadores de
implicación.
Los resultados han sido los siguientes:
130
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
Los operadores de implicación robustos son aquellos que verifican las siguientes
propiedades:
a) I ( h , 0 ) = 0, ∀ h ∈ [ 0 , 1 ]
b) I ( h , 1 ) > 0, ∀ h ∈ ( 0 , 1 ) e I ( 1 , 1 ) = 1
c) I ( 0 , y ) = 0, ∀ y ∈ [ 0 , 1 ]
Los resultados del PMGA y GA_ECM con el mejor método de defuzzificación
obtenidos en la experimentación muestran que es posible encontrar un método de
defuzzificación apropiado que permita obtener buenos resultados en combinación
con cada operador de implicación aunque éste no cumpla las propiedades básicas.
Esto aconsejó realizar un estudio de los métodos de defuzzificación en relación con
dichas propiedades. Se observó que determinadas características de los métodos de
defuzzificación pueden subsanar el hecho de que los operadores de implicación no
cumplan algunas propiedades básicas concretas, obteniéndose una caracterización
de las diferentes familias de operadores de implicación en base a las propiedades
básicas y a los métodos de defuzzificación adecuados para ser utilizados en
combinación con ellos para obtener SBRDs aptos para la ingeniería.
Las conclusiones más relevantes obtenidas referentes a la relación entre las
propiedades básicas y los métodos de defuzzificación son las siguientes:
1. Claramente, el grado de emparejamiento es el valor de importancia más
general en el sentido de ser el más apropiado en el mayor número de casos.
2. El PMV es un valor característico más general que el CG porque es más
apropiado en la mayoría de los casos.
3. El Modo B – FITA es más general que el Modo A – FATI para el diseño del
Interfaz de Defuzzificación.
4. Los métodos de defuzzificación que trabajan en Modo B – FITA y usan el
valor característico PMV y el valor de importancia grado de emparejamiento
(como por ejemplo el PMV ponderado por el o el PMV del conjunto difuso de
mayor grado de emparejamiento) pueden subsanar la no verificación de
cualquier propiedad básica.
5. Desde un punto de vista práctico, el Modo A – FATI tiene dos formas de
agregar los conjuntos difusos inferidos. Ninguna de ellas, MAR o FLR,
podría considerarse como más genérica que la otra. El MAR es apropiado
cuando la propiedad básica a1) no se verifica o cuando no lo hacen las
propiedades a) y c) en conjunto. El FLR es apropiado cuando todas las
propiedades básicas se verifican o cuando la propiedad básica a1) no se
verifica. Cabe recordar de nuevo lo que se advirtió en la Sección 1.2.4.1 en el
sentido que desde un punto de vista lógico, la agregación en el Modo A –
Conclusiones
131
FATI se realiza con unos operadores de agregación u otros en dependiendo
del operador de implicación utilizado en la etapa de inferencia. Así, desde un
punto de vista lógico, las funciones de implicación sólo deben agregarse con
la t-norma del mínimo mientras que los operadores de implicación t-norma
deben agregarse con la t-conorma del máximo.
Las conclusiones más relevantes obtenidas referentes a la relación entre las
familias de operadores de implicación y los métodos de defuzzificación son las
siguientes:
1. Las T-normas son operadores de implicación robustos porque verifican las
tres propiedades básicas. Así pues, mostrarán buenos resultados con un
amplio grupo de métodos de defuzzificación excepto con los del Modo A –
FATI tipo MAR.
2. Los operadores force-implication garantizan la verificación de la propiedad
c). Las posibilidades para las otras dos propiedades básicas son:
•
Verificar a), b) y c). En este caso pueden utilizarse con un amplio
grupo de métodos de defuzzificación excepto para el Modo A – FATI
tipo MAR.
•
Verificar a) y c). En este caso, para obtener buen comportamiento,
deben utilizarse con métodos de defuzzificación que trabajen en Modo
B – FITA con el grado de emparejamiento como valor de importancia.
•
Verificar b) y c). Los métodos de defuzzificación apropiados para este
grupo son los siguientes:
•
o
El Modo A – FATI que utilice el MOM.
o
El Modo B – FITA que utilice el grado de emparejamiento y
el PMV.
Verificar sólo la propiedad c). En este caso los métodos de
defuzzificación apropiados son los que trabajan en Modo B – FITA
con el grado de emparejamiento y el PMV.
3. Las S-Implicaciones verifican la propiedad
comportamiento con los siguientes métodos:
b)
y
muestran
buen
•
El Modo B – FITA con el PMV y el grado de emparejamiento.
•
El Modo A – FATI agregando con una t-norma y defuzzificando con el
MOM.
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
132
4. Hay dos tipos de R-Implicaciones en función del tipo de t-norma con el que
han sido obtenidas:
•
Las R-Implicaciones obtenidas por residuación de una t-norma
positiva verifican las propiedades básicas a1) y b). Por tanto, los
métodos de defuzzificación apropiados son los del Modo B – FITA con
el grado de emparejamiento como valor de importancia.
•
Aquellas obtenidas por residuación de una t-norma no positiva sólo
verifican la propiedad b), por lo que los métodos de defuzzificación
apropiados son los mismos que en el caso de las S-Implicaciones.
Finalmente, destacar que los operadores de implicación que aparentemente “no
tienen mucho sentido desde el punto de vista de la ingeniería” y que “violan el
sentido común de la ingeniería” [Men95] pueden ser considerados para las
aplicaciones de este tipo si son utilizados en combinación con un método de
defuzzificación apropiado que garantice buen comportamiento. Para muchos
autores supone una compensación de su falta de sentido. Para otros, se trata de
saber cómo interpretar el significado de la implicación [DP96], “frecuentemente el
uso adecuado de los operadores de implicación no es comprendido en control
difuso.”.
Por otro lado, es importante señalar que afirmaciones clásicas tales como
“Muchos métodos de defuzzificación han sido propuestos en la literatura, pero no
hay base científica para ninguno de ellos... ( ); consecuentemente, la defuzzificación
es un arte más que una ciencia...” [Men95] quedan en evidencia tras el estudio
realizado, pues la defuzzificación debe ir vinculada al modo en que se haya
realizado la inferencia y sí existen pautas que guíen la elección del método de
defuzzificación a emplear.
Apéndice A: Resultados Parciales
133
Apéndice A: Resultados Parciales
En este apéndice se muestran las tablas parciales de los Grados de Adaptación
asociados al Error Cuadrático Medio (GA_ECM) en cada uno de los tres problemas
de modelado considerados F1, F2 y E1.
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I11
I12
I13
I14
I15
I16
I17
I18
I19
I20
I21
I22
I23
I24
I25
I26
I27
I28
I29
I30
I31
I32
I33
I34
I35
I36
I37
D1
0.95150
0.96642
0.97448
0.58572
0.58572
0.97529
0.95141
*
*
0.58416
0.58380
0.58384
0.65992
0.43159
*
0.58416
0.58447
0.43159
0.43159
0.45108
*
0.65883
0.59603
0.43159
0.43260
*
0.64528
0.48715
0.43159
0.43159
0.43159
0.59603
0.48715
0.43159
0.43159
0.80014
*
D2
0.57323
0.67563
0.61288
0.58499
0.58504
0.63521
0.57032
*
*
0.58416
0.58420
0.58421
0.43159
0.43159
*
0.58416
0.58431
0.43159
0.43159
0.27028
*
0.43159
0.28509
0.22397
0.00000
*
0.43159
0.48716
0.43159
0.43159
0.43159
0.28509
0.48716
0.43159
0.43159
0.43134
*
D10
0.43159
0.43159
0.43159
0.43159
0.43159
0.43159
0.43159
*
*
0.95141
0.94746
0.94746
0.94768
0.94746
*
0.95141
0.95291
0.95287
0.94746
0.94746
*
0.94740
0.95141
0.94746
0.94746
*
0.94967
0.95141
0.94746
0.94746
0.95287
0.95141
0.95141
0.72484
0.94750
0.95141
*
D11
0.43159
0.43159
0.43159
0.43159
0.43159
0.43159
0.43159
*
*
0.98084
0.98213
0.98682
0.98903
0.99212
*
0.98084
0.97982
0.61781
0.56946
0.48927
*
0.99189
0.66937
0.56946
0.49032
*
0.98188
0.98604
0.95324
0.95199
0.61781
0.66937
0.98604
0.51979
0.59777
0.67520
*
D21
0.54893
0.65920
0.58684
0.99417
0.99345
0.61934
0.52445
0.99557
0.99438
0.99345
0.99374
0.99438
0.99701
0.99643
0.99756
0.99345
0.99271
0.55627
0.52391
0.41115
0.99339
0.99691
0.57656
0.49219
0.36969
0.99155
0.97375
0.99074
0.77430
0.77461
0.55627
0.57656
0.99074
0.49623
0.53265
0.65913
0.99130
D24
0.99756
0.99112
0.99756
0.99557
0.99557
0.99557
0.83777
0.99557
0.99756
0.99557
0.99756
0.99756
0.99700
0.99756
0.99756
0.99557
0.99413
0.83144
0.84357
0.84357
0.99557
0.99679
0.99557
0.84357
0.84357
0.99557
0.99361
0.99557
0.84357
0.84357
0.83144
0.99557
0.99557
0.68826
0.91954
1.00000
0.99557
D27
0.60122
0.73154
0.64388
0.95317
0.95343
0.67936
0.57032
0.95141
0.95324
0.95343
0.95339
0.95324
0.94746
0.95199
0.94746
0.95343
0.95358
0.61781
0.56946
0.42800
0.95019
0.94746
0.65878
0.56946
0.42800
0.95343
0.94747
0.95356
0.95324
0.95199
0.61781
0.65878
0.95356
0.51979
0.59459
0.66620
0.95353
D30
0.94746
0.95322
0.94746
0.95141
0.95141
0.95141
0.95141
0.95141
0.94746
0.95141
0.94746
0.94746
0.94768
0.94746
0.94746
0.95141
0.95291
0.95287
0.94746
0.94746
0.95141
0.94740
0.95141
0.94746
0.94746
0.95141
0.94740
0.95141
0.94746
0.94746
0.95287
0.95141
0.95141
0.72484
0.94750
0.95141
0.95141
D31
0.50975
0.50393
0.50975
0.50606
0.50606
0.50606
0.45376
0.50606
0.50975
0.95503
0.95579
0.95579
0.93744
0.95579
0.95579
0.95503
0.95343
0.66397
0.67522
0.67522
0.95503
0.93533
0.95503
0.67522
0.67522
0.95503
0.90740
0.95503
0.67522
0.67522
0.66397
0.95503
0.95503
0.56821
0.76150
0.96060
0.50606
Tabla 4.19. GA_ECM obtenido en el modelado difuso de F1.
El ECM máximo es 161.04781 y el mínimo es 1.86715.
D33
0.43352
0.43883
0.43530
0.44710
0.44885
0.43705
0.43259
0.44521
0.41920
0.98472
0.98540
0.98962
0.98053
0.99428
0.95579
0.98472
0.98481
0.52885
0.49653
0.39035
0.98905
0.98657
0.53987
0.45400
0.33517
0.97939
0.98137
0.99051
0.95324
0.95199
0.52885
0.53987
0.99051
0.48538
0.51080
0.65176
0.41439
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
134
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I11
I12
I13
I14
I15
I16
I17
I18
I19
I20
I21
I22
I23
I24
I25
I26
I27
I28
I29
I30
I31
I32
I33
I34
I35
I36
I37
D1
0.95679
0.96365
0.96910
0.77621
0.77621
0.97022
0.95778
*
*
0.77250
0.76466
0.76601
0.80176
0.41883
*
0.77250
0.77286
0.35407
0.35407
0.35407
*
0.80176
0.57541
0.35407
0.35407
*
0.61096
0.58500
0.35407
0.35407
0.35407
0.57541
0.58500
0.35407
0.35407
0.76694
*
D2
0.51006
0.62764
0.54828
0.77475
0.77475
0.57679
0.49715
*
*
0.77223
0.77231
0.77130
0.35407
0.41885
*
0.77223
0.77242
0.35407
0.35407
0.23448
*
0.35407
0.20569
0.15346
0.00000
*
0.35407
0.58508
0.35407
0.35407
0.35407
0.20569
0.58508
0.35407
0.35407
0.41447
*
D10
0.35407
0.35407
0.35407
0.35407
0.35407
0.35407
0.35407
*
*
0.95778
0.95083
0.95083
0.95121
0.95083
*
0.95778
0.95988
0.95850
0.95083
0.95083
*
0.95020
0.95778
0.95083
0.95083
*
0.95105
0.95778
0.95083
0.95083
0.95850
0.95778
0.95778
0.67278
0.95075
0.95778
*
D11
0.35407
0.35407
0.35407
0.35407
0.35407
0.35407
0.35407
*
*
0.97421
0.97511
0.98122
0.99269
0.98997
*
0.97421
0.97299
0.53991
0.49586
0.41453
*
0.99341
0.59119
0.49586
0.40739
*
0.97898
0.98151
0.95964
0.95738
0.53991
0.59119
0.98151
0.46083
0.54605
0.59695
*
D21
0.48225
0.58980
0.51878
0.99479
0.99355
0.55105
0.45689
0.99742
0.99522
0.99355
0.99406
0.99522
0.99933
0.99848
1.00000
0.99355
0.99221
0.48588
0.45610
0.35375
0.99381
0.99881
0.50380
0.42247
0.31226
0.99307
0.96528
0.98842
0.43314
0.43929
0.48588
0.50380
0.98842
0.43527
0.47638
0.59785
0.98956
D24
1.00000
0.98935
1.00000
0.99742
0.99742
0.99742
0.82299
0.99742
1.00000
0.99742
1.00000
1.00000
0.99932
1.00000
1.00000
0.99742
0.99495
0.81301
0.83404
0.83404
0.99742
0.99878
0.99742
0.83404
0.83404
0.99742
0.99575
0.99742
0.83404
0.83404
0.81301
0.99742
0.99742
0.63006
0.91454
0.99730
0.99742
D27
0.52819
0.65550
0.56859
0.95967
0.96004
0.60397
0.49715
0.95778
0.95964
0.96004
0.95991
0.95964
0.95084
0.95738
0.95083
0.96004
0.96019
0.53991
0.49586
0.37518
0.96017
0.95081
0.58124
0.49586
0.37518
0.96004
0.95084
0.96054
0.95964
0.95738
0.53991
0.58124
0.96054
0.46083
0.54083
0.58827
0.95956
D30
0.95083
0.95911
0.95083
0.95778
0.95778
0.95778
0.95778
0.95778
0.95083
0.95778
0.95083
0.95083
0.95121
0.95083
0.95083
0.95778
0.95988
0.95850
0.95083
0.95083
0.95778
0.95020
0.95778
0.95083
0.95083
0.95778
0.95105
0.95778
0.95083
0.95083
0.95850
0.95778
0.95778
0.67278
0.95075
0.95778
0.95778
D31
0.44751
0.43827
0.44751
0.44184
0.44184
0.44184
0.37868
0.44184
0.44751
0.96381
0.96521
0.96521
0.93849
0.96521
0.96521
0.96381
0.96050
0.61119
0.62975
0.62975
0.96381
0.93432
0.96381
0.62975
0.62975
0.96381
0.91474
0.96381
0.62975
0.62975
0.61119
0.96381
0.96381
0.49628
0.72067
0.96056
0.44184
Tabla 4.20. GA_ECM obtenido en el modelado difuso de F2.
El ECM máximo es 8.43317 y el mínimo es 0.04447.
D33
0.35589
0.36078
0.35755
0.37121
0.37282
0.35919
0.35503
0.36950
0.37989
0.98299
0.98370
0.98797
0.98626
0.99173
0.96521
0.98299
0.98215
0.45889
0.42833
0.32991
0.98646
0.98805
0.46338
0.38078
0.27241
0.97729
0.97742
0.98420
0.95964
0.95738
0.45889
0.46338
0.98420
0.42294
0.45176
0.58979
0.37570
Apéndice A: Resultados Parciales
I1
I2
I3
I4
I5
I6
I7
I8
I9
I10
I11
I12
I13
I14
I15
I16
I17
I18
I19
I20
I21
I22
I23
I24
I25
I26
I27
I28
I29
I30
I31
I32
I33
I34
I35
I36
I37
D1
0.92783
0.93683
0.93591
0.91652
0.91652
0.93647
0.92789
*
*
0.91572
0.91059
0.91178
0.92868
0.67289
*
0.91572
0.91566
0.38042
0.38042
0.38222
*
0.92874
0.86975
0.38042
0.38042
*
0.70518
0.79899
0.38042
0.38042
0.38042
0.86975
0.79899
0.38042
0.38042
0.91748
*
D2
0.53946
0.70296
0.59734
0.91647
0.91638
0.64041
0.50627
*
*
0.91521
0.91548
0.91480
0.38042
0.67289
*
0.91521
0.91559
0.38042
0.38042
0.19211
*
0.38042
0.28144
0.19826
0.00000
*
0.38042
0.79683
0.38042
0.38042
0.38042
0.28144
0.79683
0.38042
0.38042
0.56548
*
D10
0.38042
0.38042
0.46643
0.38042
0.38042
0.38042
0.38042
*
*
0.92789
0.92699
0.92699
0.92681
0.92699
*
0.92789
0.92805
0.92773
0.92699
0.92699
*
0.92775
0.92789
0.92699
0.92699
*
0.92707
0.92845
0.92699
0.92699
0.92773
0.92789
0.92845
0.61359
0.92770
0.92789
*
135
D11
0.38042
0.38042
0.38042
0.38042
0.38042
0.38042
0.38042
*
*
0.98658
0.98708
0.98660
0.99302
0.98003
*
0.98658
0.98478
0.55199
0.50601
0.37395
*
0.98817
0.63304
0.50601
0.34669
*
0.97108
0.97518
0.92789
0.92775
0.55199
0.63304
0.97518
0.44227
0.53006
0.64056
*
D21
0.50271
0.64577
0.55596
0.99694
0.99643
0.60005
0.46264
0.99769
0.99719
0.99643
0.99667
0.99719
1.00000
0.99889
0.99977
0.99643
0.99591
0.49311
0.46247
0.29054
0.99671
0.99954
0.53983
0.41888
0.23048
0.99492
0.97007
0.99419
0.88058
0.88036
0.49311
0.53983
0.99419
0.42580
0.46943
0.63275
0.99512
D24
0.99977
0.99518
0.99977
0.99769
0.99769
0.99769
0.79396
0.99769
0.99977
0.99769
0.99977
0.99977
0.99998
0.99977
0.99977
0.99769
0.99663
0.79201
0.79629
0.79629
0.99769
0.99960
0.99769
0.79629
0.79629
0.99769
0.99673
0.99769
0.79629
0.79629
0.79201
0.99769
0.99769
0.59004
0.92233
0.99909
0.99769
D27
0.55607
0.71779
0.61435
0.92790
0.92788
0.66057
0.50627
0.92789
0.92789
0.92788
0.92788
0.92789
0.92699
0.92775
0.92699
0.92788
0.92781
0.55199
0.50601
0.29277
0.92631
0.92705
0.62960
0.50601
0.29277
0.92788
0.92699
0.92780
0.92789
0.92775
0.55199
0.62960
0.92780
0.44227
0.52597
0.63736
0.92754
D30
0.92699
0.92738
0.92699
0.92789
0.92789
0.92789
0.92789
0.92789
0.92699
0.92789
0.92699
0.92699
0.92681
0.92699
0.92699
0.92789
0.92805
0.92773
0.92699
0.92699
0.92789
0.92775
0.92789
0.92699
0.92699
0.92789
0.92707
0.92789
0.92699
0.92699
0.92773
0.92789
0.92789
0.61359
0.92770
0.92789
0.92789
D31
0.56722
0.55984
0.56722
0.56210
0.56210
0.56210
0.43035
0.56210
0.56722
0.99733
0.99878
0.99878
0.98570
0.99878
0.99878
0.99733
0.99621
0.64762
0.65176
0.65176
0.99733
0.98119
0.99733
0.65176
0.65176
0.99733
0.95895
0.99733
0.65176
0.65176
0.64762
0.99733
0.99733
0.49837
0.78948
0.99412
0.56210
Tabla 4.21. GA_ECM obtenido en el modelado difuso de E1.
El ECM máximo es 4454404.44990 y el mínimo es 239053.62060.
D33
0.38590
0.40214
0.39151
0.42769
0.43326
0.39702
0.38256
0.42226
0.36118
0.99596
0.99600
0.99390
0.99810
0.98209
0.99878
0.99596
0.99507
0.47275
0.44200
0.27689
0.99344
0.99428
0.50995
0.38529
0.20006
0.98910
0.97231
0.98088
0.92789
0.92775
0.47275
0.50995
0.98088
0.41931
0.45289
0.62637
0.34527
136
Análisis de la Robustez de los Operadores de Implicación: Propiedades Básicas y Caracterización...
Capítulo 5
Estudio de los Métodos de
Defuzzificación
En el Capítulo 3 se descubrió el perfil de los métodos de defuzzificación que
presentan buenas cualidades prácticas en modelado difuso tras un estudio empírico
comparativo de las diferentes combinaciones de diseño que se podían realizar con
los operadores de conjunción e implicación y métodos de defuzzificación más
conocidos. Se observó que algunos operadores eran buenos independientemente de
con quien se combinasen mientras que otros tenían una fuerte dependencia de este
factor. Posteriormente, en el Capítulo 4 se procedió al estudio de ésta última
particularidad descubriéndose un grupo de propiedades para los operadores de
implicación que, de cumplirse, permiten utilizarlos con bastante generalidad y
garantías de buenos resultados. Además, se comprobó que los que no cumplían esas
propiedades
podrían
también
utilizarse
satisfactoriamente
eligiendo
adecuadamente las características de los métodos de defuzzificación con los que se
combinen. Esto supuso un importante resultado, pues realizar la defuzzificación
todavía es considerado un arte por muchos autores que piensan que no existe base
científica y que se trata más de algo experimental.
En este capítulo se va a profundizar en el estudio de los métodos de
defuzzificación. Se ampliará la lista de ellos con un nuevo grupo que recibe la
mayoría de las aportaciones más recientes, el de los paramétricos, y se
seleccionarán los más adecuados para someterlos a un estudio práctico comparativo
en combinación con un grupo seleccionado de operadores de implicación.
Finalmente, contando con un amplio conocimiento de las propuestas de la
literatura especializada, y con los resultados del estudio llevado a cabo en el
Capítulo 4 que permiten conocer las características que deben verificar los métodos
de defuzzificación para ser lo más generales posible incluso cuando el operador de
implicación no verifica las propiedades básicas para ser un operador robusto, se
tratará de formalizar una propuesta de un nuevo grupo de métodos de
Estudio de los Métodos de Defuzzificación
138
defuzzificación. Los nuevos métodos serán experimentados para verificar que
constituyen un avance práctico real.
5.1 Clasificación de los Métodos de Defuzzificación
Los métodos de defuzzificación se pueden clasificar de acuerdo con varios
criterios. En esta sección se presentan tres de estas posibles taxonomías:
1. En base al modo de trabajo:
•
Modo A – FATI: (agregar primero y defuzzificar después): Descrito en
detalle en el Capítulo 1, Sección 1.2.4.1.
•
Modo B – FITA: (defuzzificar primero y agregar después): Descrito en
detalle en el Capítulo 1, Sección 1.2.4.2.
2. En base a si utilizan o no parámetros en su expresión:
•
No paramétricos: Su expresión no depende del ajuste de un parámetro.
•
Paramétricos: Su expresión depende del ajuste de uno o más parámetros.
3. En base al valor característico considerado (propuesta por Leekwijck y Kerre en
[LK99]):
•
Métodos basados en el máximo y derivados: Utilizan el grado de
emparejamiento o el valor del máximo grado de pertenencia e ignoran todo
lo demás. Son muy eficientes computacionalmente. Como representante más
clásico de este grupo podemos nombrar la Media de los Máximos (MOM)
(cuya expresión se cita en la Sección 1.2.4.1).
•
Métodos basados en funciones de distribución y derivados: Primero
convierten la función de pertenencia en una función de distribución de
probabilidad y posteriormente calculan el valor esperado. Su representante
más popular es el Centro de Gravedad (Sección 1.2.4.1). En ésta familia
Métodos de Defuzzificación No Paramétricos
139
también son ampliamente citados los métodos BADD, SLIDE y QM, cuyas
expresiones se mostrarán posteriormente en el presente capítulo.
•
Métodos basados en área: Utilizan el área de la función de pertenencia para
determinar el valor de defuzzificación. Son muy empleados en modelado y
control difuso y su representante más conocido es el Centro de Áreas (COA).
•
Métodos misceláneos: En este grupo, Leekwijck y Kerre incluyen todas las
propuestas que no pertenecen a ninguno de los tres grupos anteriores.
En la presente memoria se ha utilizado la primera taxonomía citada: la basada
en el modo de trabajo. En adelante se seguirá utilizando dicho criterio combinado
con el basado en el uso o no de parámetros. De este modo, la Sección 5.2 se dedica a
los métodos de defuzzificación no paramétricos con subsecciones para los dos
posibles modos de trabajo. De igual forma, la Sección 5.3 se dedicará a los métodos
paramétricos con sus dos subsecciones correspondientes.
5.2 Métodos de Defuzzificación No Paramétricos
Los métodos de defuzzificación no paramétricos son aquellos que no emplean un
parámetro en su expresión. Históricamente, fueron los primeros propuestos y por
ello existe una gran variedad. A su vez, como se ha indicado anteriormente, se
pueden clasificar según su modo de trabajo, es decir, dependiendo de si agregan
previamente los conjuntos difusos para posteriormente defuzzificarlos (Modo A –
FATI) o si por el contrario el conjunto difuso que constituye la contribución
individual de cada regla se defuzzifica individualmente y finalmente se lleva a cabo
algún cálculo con los valores obtenidos para unificarlos en un único valor (Modo B –
FITA).
5.2.1 Métodos de Defuzzificación No Paramétricos del
Modo A – FATI
La descripción del Modo A – FATI se realizó en la Sección 1.2.4.1. Dentro de este
grupo, podemos encontrar los siguientes:
•
La Media de los Máximos (MOM) del conjunto difuso B’:
y1 = Inf {z/ µB’ (z) = Sup µB’ (y)},
y2 = Sup {z/ µB’ (z) = Sup µB’ (y)},
Estudio de los Métodos de Defuzzificación
140
y0 =
•
y1 + y2
.
2
El Centro de Gravedad (CG) del conjunto difuso B’:
∫ y ⋅ µB' ( y ) dy
y0 = Y
.
∫Y µB' ( y ) dy
•
El Punto Máximo más a la izquierda (First of Maxima: FOM) [Wie97,
HT93]:
y0 = Inf {z/ µB’ (z) = Sup µB’ (y)}.
•
El Punto Máximo más a la derecha (Last of Maxima: LOM) [Wie97, HT93]:
y0 = Sup {z/ µB’ (z) = Sup µB’ (y)}.
•
La Media de los α-cortes Esperados (Expected Alpha Mean: EAM) [Wie97]:
Se nota por tα el α-corte, por - tα= inf (tα) y por +tα= sup (tα).
Si α se define como,
1
α
=
∫ α ⋅ tα
da
,
0
s
donde s es el área del conjunto difuso B’, se tiene
tα = α − corte en α ,
y0 =
•
( −tα + +tα )
2
.
La Media de la Función de Pertenencia (Median of Membership: DOM)
[Wie97], también conocido por Centro de Área (COA) [Run97]:
y0 = z tal que
z
∫ µB' ( x )dx =
a
•
b
∫ µB' ( x )dx
z
La Media de la Gravedad (Median of Gravity: DOG) [Wie97]:
y0 = z tal que
Métodos de Defuzzificación No Paramétricos
141
v
∫ T ( x ) dx =
a
b
∫ T ( x ) dx
v
siendo T(x) = y ⋅ µB’(y) la función de gravedad.
•
La Moda [Wie97]:
y0 = t1
siendo t1 el α-corte de altura 1. Sólo es válido para conjuntos difusos
unimodales.
•
Centro de Máximos (Center of Máxima: COM) [Run97], de igual definición
que el MOM salvo porque utiliza la mediana en lugar de la media.
•
El Centro de la zona de Mayor Área (Center of Larguest Area: CLA) [HT93],
válido para funciones de pertenencia no convexas, ya que en el caso de las
funciones convexas es equivalente al Centro de Áreas (COA). Se calcula
separando el conjunto difuso no convexo en zonas convexas y obteniendo el
COA del tramo de mayor área.
5.2.2 Métodos de Defuzzificación No Paramétricos del
Modo B – FITA
La descripción del Modo B – FITA se realizó en la Sección 1.2.4.2. Allí se
definieron y se introdujo la notación para los grados de importancia que de nuevo
se emplean aquí, donde si representa el área de un conjunto difuso B’i, li representa
la altura y hi el grado de emparejamiento. Igualmente se realizó para los valores
característicos, donde el punto de máximo valor se nota por PMV y centro de
gravedad por CG. Existen gran variedad de métodos de defuzzificación que
emplean el Modo B – FITA, los cuales pueden clasificarse en familias atendiendo a
su modo de construcción, como se mostró asimismo en el Capítulo 1:
•
Sumas ponderadas por grados de importancia [Tsu79,HDR93,HT93,
CCCHP94]:
o
Centro de Gravedad ponderado por el área:
y0 =
∑ si ⋅ W i
i
.
∑ si
i
Estudio de los Métodos de Defuzzificación
142
o
Centro de Gravedad ponderado por la altura:
∑ li ⋅ Wi
y0 = i
.
∑ li
i
o
Centro de Gravedad ponderado por el grado de emparejamiento:
∑ hi ⋅ Wi
y0 = i
.
∑ hi
i
o
Punto de Máximo Valor ponderado por el área:
∑ si ⋅ G i
y0 = i
.
∑ si
i
o
Punto de Máximo Valor ponderado por la altura:
∑ li ⋅ Gi
y0 = i
.
∑ li
i
Este método también es conocido en la literatura como Height
[HT93].
o
Punto de Máximo Valor ponderado por el grado de emparejamiento:
∑ hi ⋅ Gi
y0 = i
.
∑ hi
i
•
Basados en el conjunto difuso de mayor grado de importancia
[HDR93, HT93, Hel93, PYL92, RG93a, CCCHP94]:
o
Centro de Gravedad del conjunto difuso con mayor área:
B’k = { B’i si = Max (st), ∀ t ∈ {1,...,m} },
y0 = Wk.
o
Centro de Gravedad del conjunto difuso con mayor altura:
Métodos de Defuzzificación No Paramétricos
143
B’k = { B’i li = Max (lt), ∀ t ∈ {1,...,m} },
y0 = Wk.
o
Centro de Gravedad del conjunto difuso de mayor grado de
emparejamiento:
B’k = { B’i hi = Max (ht), ∀ t ∈ {1,...,m} },
y0 = Wk.
o
Punto de Máximo Valor del conjunto difuso con mayor área:
B’k = { B’i si = Max (st), ∀ t ∈ {1,...,m} },
y0 = Gk.
o
Punto de Máximo Valor del conjunto difuso de mayor altura:
B’k = { B’i yi = Max (yt), ∀ t ∈ {1,...,m} },
y0 = Gk.
o
Punto de Máximo Valor del conjunto difuso de mayor grado de
emparejamiento:
B’k = { B’i hi = Max (ht), ∀ t ∈ {1,...,m} },
y0 = Gk.
•
Otros [HDR93,HT93,Hel93,CCCHP94]:
o
Media de los Máximos Valores:
y0 =
o
∑ Gi
i
m
.
Media del Mayor y Menor Valor:
Gmin = Min Gi , ∀ i ∈ {1,...,m}
Gmax = Max Gi , ∀ i ∈ {1,...,m}
y0 =
o
Gmin + Gmax
.
2
Centro de Sumas:
y0 =
∑ ∫Y y ⋅ µB' i( y ) dy
i
∑ ∫Y µB' i( y ) dy
i
.
Estudio de los Métodos de Defuzzificación
144
o
Método de Calidad (Quality Method (QM)) [HT93]:
n
y0 =
∑ li ⋅ ai
i =1
n
∑ ai
,
i =1
donde li es el punto de máxima altura del conjunto difuso inferido con
la regla i, y ai =
xiderecho
hi
, con xiderecho el extremo superior y
− xiizquierdo
xiizquierdo el extremo inferior del conjunto difuso. La Figura 5.1 muestra
estos puntos para un conjunto difuso triangular.
Figura 5.1. En un conjunto difuso triangular
Es un método pensado para su uso con funciones de pertenencia no
simétricas.
5.3 Métodos de Defuzzificación Paramétricos
Las propuestas de nuevos métodos de defuzzificación realizadas en los últimos
años suelen pertenecer a este grupo caracterizado porque las expresiones cuentan
al menos con un parámetro. En unos casos, la introducción de parámetros refleja la
intención de los autores de adaptar el método de defuzzificación al problema
mientras que en otros el objetivo es modificar el propio comportamiento del método.
Las dos subsecciones siguientes muestran un amplio grupo de métodos de
defuzzificación paramétricos comunes, clasificados según su modo de trabajo, A ó B.
Tras esto, incluso se muestra un método que excepcionalmente combina métodos
del Modo A y del B, al cual hemos llamado Modo Mixto.
Métodos de Defuzzificación Paramétricos
145
5.3.1 Métodos de Defuzzificación Paramétricos del Modo A
– FATI
Este grupo comprende los métodos siguientes:
•
Estrategia de Defuzzificación basada en una Transformación de Distribución
Gaussiana (GTD) [Jia96]:
∑ µB' ( yi ) ⋅ exp[− β ⋅ ( µB' ( yi ) − µBm' ) 2 ]⋅ yi
n
y0 =
i
∑ µB' ( yi ) ⋅ exp[− β ⋅ ( µB' ( yi ) −
n
µ Bm' ) 2
i
]
,
donde el parámetro de este método es β y µ Bm' es el valor máximo que toma
µ B' , generalmente 1, ya que 0≤ µ B' ( yi ) ≤ µ Bm' . Cuando β → ∞,
equivale al
MOM, y cuando β = 0, equivale al COA.
Este método de defuzzificación es uno de los que, como se indicó en el
Capítulo 2, han sido definidos por sus propios autores para su
implementación con el Método Aproximado.
GTD es un método de defuzzificación para conjuntos difusos convexos.
•
Estrategia de Defuzzificación basada en Transformación Polinomial (PTD)
[Jia96]:
2
N
∑ µB' ( yi ) ⋅ ∑ β j ⋅ ( µB' ( yi ) − 0.5 ) j ⋅ yi
i
j =0
.
y0 =
2
n
N
∑ µB' ( yi ) ⋅ ∑ β j ⋅ ( µB' ( yi ) − 0.5 ) j
i
j =0
n
En este caso no se trata de un solo parámetro sino de un conjunto de
parámetros, βj . Estos N parámetros forman parte de una serie de Taylor de
N términos. El autor utiliza N=14 en los ejemplos que presenta. Nótese que
si β0 = 1 y βi = 0, ∀i de 1 a N, equivale al COA.
De nuevo se trata de un método especialmente indicado para controladores
difusos convexos.
•
Estrategia de Defuzzificación
Polinomial (M-PTD) [Jia97]:
Multimodo
basada
en
Transformación
Estudio de los Métodos de Defuzzificación
146
N
n
y0 =
∑ µB' ( yi ) ⋅ ∑ β j ⋅ ( µB' ( yi ) − 0.5 ) j ⋅ yi
i
j =0
N
∑ µB' ( yi ) ⋅ ∑ β j ⋅ ( µB' ( yi ) − 0.5 ) j
i
j =0
n
.
Se trata de una variante de PTD especialmente indicada para los conjuntos
difusos no convexos, es decir, para obtener buenos comportamientos con
SBRDs cuyas actuaciones puedan ser contradictorias.
•
Método de Defuzzificación de las Distribuciones de Defuzzificación Básicas
(BADD) [Fil91]:
n
y0 =
∑ ( µB' ( yi ))α ⋅ yi
i =1
n
∑ ( µB' ( yi ))
.
α
i =1
En este método el parámetro es α. Se trata de un método paramétrico de
amplia difusión habitualmente considerado en cualquier estudio de métodos
de defuzzificación paramétricos.
•
Método de Defuzzificación Semilineal (SLIDE) [YF93]:
n
y0 =
∑ µB' ( yi ) ⋅ J i ⋅ yi
i =1
n
∑ µB' ( yi ) ⋅ J i
,
i =1
1 − β , µ B' ( yi ) < α
.
µ B' ( yi ) ≥ α
1,
donde Ji =
Los parámetros de este método son dos, α y β, α ∈ [0,M] y β ∈ [0,1]. Se trata
de nuevo de un método de defuzzificación de referencia en los estudios de los
métodos de defuzzificación paramétricos. El COA y el MOM son casos
particulares de SLIDE en función del valor de sus parámetros. Si α = 0 ó si
α > 0 y β = 0, entonces equivale al COA. Si α = Maxi µi y β = 1, entonces
coincide con el MOM. Habitualmente, se fija el parámetro α=1 y se ajusta β.
•
Método Torque [Kie97]:
y0 =
1
⋅
p
b
∫ µB' ( y ) ⋅ y ⋅ dy ,
a
Métodos de Defuzzificación Paramétricos
147
donde p es un parámetro o factor de escala y el contenido de la integral
equivale a la función de gravedad T(y) estudiada en la Sección 5.2.1. El
autor recomienda tomar como p :
p=
b−a
,
N
donde N es el número de etiquetas en el conjunto de términos del
consecuente, y a y b son los extremos del dominio de la variable.
•
Método de los Valores Más Típicos (MTV) [KF98]:
Este método se basa en elegir como valor de salida, en lugar de un valor
numérico con tendencia central, un valor numérico más típico. Considerando
la implementación aproximada descrita en el Capítulo 2 y discretizando el
universo en m puntos, tenemos un conjunto de m pares de puntos (yi,
µ B' ( yi ) ), donde yi es el valor de abcisa y µ B' ( yi ) es el grado de pertenencia
que le corresponde. El valor que defuzzifica este método será el que de
solución a la siguiente expresión:
m
y0 =
∑ yi ⋅ γ i ( yi − y0 ) ⋅ ( µB' ( yi )) λ
i =1
m
∑ γ i ( yi − y0 ) ⋅ ( µB' ( yi ))
,
λ
i =1
donde: λ > 1es un parámetro real, (el autor suele utilizar λ = 2),
γ i ( u ) = e − β ⋅u , por tanto, los parámetros de este método de defuzzificación son
λ y β.
Si la solución es única, ese es el valor que defuzzifica. Si hay varias
soluciones se tomará la media aritmética de ellas.
•
Defuzzificación de Área Variable (VAD) [Bas95]:
Se trata de un método de defuzzificación similar al Centro de Gravedad en el
que las zonas de intersección (o solapamiento) entre etiquetas son
consideradas más de una vez y multiplicadas por un parámetro.
y0 =
∑ ( yi ⋅ µ B' ( xi )
∑ ( µB' ( yi )
+ ξ ⋅ yia ⋅ µ ( yia ))
+ ξ µ ( yia ))
,
donde ξ es el parámetro (obsérvese que si es 0, entonces equivale a COG). La
variable a no es un parámetro sino un índice que señala las áreas solapadas
de los conjuntos difusos; µB’ es la función de pertenencia del consecuente,
mientras que µ es la función de pertenencia de la zona de intersección entre
conjuntos difusos.
Estudio de los Métodos de Defuzzificación
148
La siguiente expresión es una variante de la anterior en la que i es el
número del conjuntos difusos activados y j es el número de áreas de
solapamiento indicadas por el índice a. Cada transición de una regla a otra
tiene un parámetro diferente.
y0 =
∑ yi ⋅ µB' ( xi )
+
∑ µB' ( yi )
+
i
j
i
•
∑ξ j ⋅ yaj ⋅ µ ( yaj )
∑ξ j ⋅ µ ( yaj )
.
j
Valor de Defuzzificación basado en Conjuntos de Nivel Generalizados [FY93]:
Se trata de un método para conjuntos difusos convexos. Los autores, Filev y
Yager, discretizan tales conjuntos difusos convexos en capas o niveles
horizontales, siendo el nivel 1 el más bajo. Cada nivel es a su vez discretizado
en una serie de puntos.
Sea ci el número de puntos tomados en la discretización del nivel i; sea mi =
ei
, donde ei =
ci
ci
∑ a ji , es decir, la suma de los valores de los puntos de un
j =1
mismo nivel. Así pues, mi es un valor promedio. El valor αi es el parámetro
del nivel i llamado parámetro de confianza. La expresión del método es:
n
y0 =
∑ ci ⋅ mi ⋅ α i
i =1
n
∑ ci ⋅ α
.
i
i =1
Cuando α → ∞ el método tiende a ser equivalente al MOM; cuando α = 0
tiende a la media del nivel 1 y cuando α ≈ 1, se aproxima al COA.
5.3.2 Métodos de Defuzzificación Paramétricos del Modo B
– FITA
El grupo de métodos de defuzzificación paramétricos que trabajen en Modo B –
FITA, cuenta con muy pocas contribuciones en la literatura. El siguiente método es
uno de los representantes:
•
Método de Calidad (QM) Paramétrico [HT93]:
n
y0 =
h
∑ li ⋅ dξi
i =1
n
h
∑ dξi
i =1 i
i
,
di = xiderecho − xiizquierdo .
Métodos de Defuzzificación Paramétricos
149
Se trata de un método paramétrico basado en el método no paramétrico que
trabaja en el Modo B – FITA llamado QM que fue mostrado en la Sección
5.2.2. Si el valor del parámetro ξ es 1 equivale al QM clásico (no
paramétrico), mientras que cuando es 0 obtenemos el PMV ponderado por el
grado de emparejamiento.
5.3.3 Métodos de Defuzzificación Paramétricos Mixtos
Se ha encontrado también en la literatura un método de defuzzificación que
combina los dos modos de trabajo, el A – FATI y el B – FITA.
•
Método Mixto COG / QM [HT93]:
Su expresión es:
y0 = δ ⋅ y0COA + ( 1 − δ ) ⋅ y0QM .
donde y0COA es el método de defuzzificación COA o COG (Modo A – FATI),
y0QM es el método de defuzzificación QM (Modo B – FITA), y donde δ es el
parámetro, con δ ∈ [0,1].
5.4 Estudio Experimental
Con objeto de conocer las cualidades de los diferentes métodos de defuzzificación
en la práctica, hemos planteado la experimentación que se describe en la presente
sección.
5.4.1 Selección de
Implicación
los
Operadores
de
Conjunción
e
En cuanto al operador de conjunción, como en el Capítulo 4, utilizamos siempre
la t-norma del producto lógico por ser la más difundida y porque, como se observó
en el Capítulo 3, la elección de este operador tiene escasa influencia.
Para el operador de implicación empleamos una selección de siete operadores
representativos de las diferentes familias. Estos son: como representantes de la
familia de los que extienden la implicación booleana se han elegido cuatro
operadores: tres funciones de implicación: la S-Implicación de Diene (I1 en el
Apéndice I de la presente memoria), la R-Implicación de Gödel (I4), la S y R-
Estudio de los Métodos de Defuzzificación
150
Implicación de Lukasiewicz (I6), y el operador de implicación de Gaines (I8). Como
representantes de la familia de los operadores que extienden la conjunción
booleana se han elegido tres operadores, una t-norma, la del producto lógico
(mínimo) (I10), y dos force-implications: una basada en operador de
indistinguibilidad, I18, y otra basada en distancia, I36.
Cabe destacar que no todos los métodos de defuzzificación citados en la Sección
5.3 han sido utilizados en el presente estudio experimental. En unos casos, el
motivo es que se trata de métodos específicos para condiciones particulares que no
corresponden a la experimentación aquí planteada (por ejemplo el método de la
Moda) y en otros a que pruebas previas mostraron que algunas combinaciones
presentaban un mal comportamiento muy acusado, como es el caso del método
Torque, lo cual interfería en las medidas.
De este modo, los métodos de defuzzificación empleados son la totalidad de los
citados en el Apéndice I de la presente memoria, es decir, treinta y cuatro métodos
no paramétricos (dieciocho del Modo A – FATI y dieciséis del Modo B – FITA) y
diecisiete paramétricos (catorce del Modo A – FATI, uno del Modo B – FITA y dos
del Modo Mixto). En todos los casos, los del Modo A – FATI se combinan con dos
formas de agregar distintas: MAR y FLR.
Para los métodos de defuzzificación paramétricos, se han empleado los valores
del parámetro que recomiendan los autores. Dichos valores aparecen en la Tabla
5.1.
Métodos
Valor de los parámetros
β=1
GTD
D36, 37, 43 y 44
N = 13, β = 1,1,1,1,1,0,...,0
PTD y MPTD
D38 y 45
α=2
BADD
D39 y 46
α = 0.75, β = 0.5
SLIDE
D40 y D47
λ = 2, β = 3.63
MTV
D41 y D48
VAD
ξ= 2
D49
ξ = 0.5
QM
D50 y D51
λ = 0.25
COG/QM
Tabla 5.1.Valores de los parámetros de los métodos de defuzzificación paramétricos
D35 y 42
Finalmente, es también importante destacar que la implementación empleada
en la presente experimentación ha sido la aproximada en lugar de la exacta (véase
Capítulo 2) que ha sido la habitualmente empleada en los Capítulos 3 y 4 de esta
memoria. El motivo fundamental es la complejidad de implementación que
presentarían algunos métodos de defuzzificación si se acometiese del modo exacto.
La granularidad empleada para la discretización del universo de las variables del
consecuente es de cien puntos. Dicha partición se reveló adecuada en el estudio
práctico llevado a cabo en el Capítulo 2.
Estudio Experimental
151
5.4.2 Aplicaciones Seleccionadas
Las tres aplicaciones empleadas en este caso son el modelado difuso de la
superficie tridimensional F2 y los dos problemas eléctricos: E1 (el de la longitud real
de la línea de baja tensión en núcleos rurales) y E2 (el de los costes óptimos teóricos
de la línea de media tensión en núcleos urbanos). En el Apéndice II de la presente
memoria se halla la descripción de todos ellos.
Al igual que en los capítulos precedentes utilizaremos las medidas de
rendimiento que fueron introducidas en el Capítulo 3, Sección 3.3. Se calculará el
GA_ECM y MGA_D en cada aplicación, así como el PMGA_D conjunto de las tres
aplicaciones. Finalmente, se obtendrán medias aritméticas para las diferentes
familias.
5.4.3 Análisis de Resultados y Conclusiones
Las Tablas 5.7, 5.8 y 5.9, ubicadas en el Apéndice A del presente capítulo,
contienen los resultados del GA_ECM para las aplicaciones F2, E1 y E2,
respectivamente. Cada una de las tablas está dividida en dos partes, a y b, que
corresponden a los métodos no paramétricos (del D1 al D34) en primer lugar y a los
paramétricos (del D35 al D51).
Como puede apreciarse, en dichas tablas aparecen algunas casillas marcadas
con el símbolo asterisco (*). Como en otras ocasiones se ha indicado en esta
memoria, estas marcas responden a los operadores de implicación que no pueden
emplearse en Modo A – FATI por no poder agregarse las funciones de pertenencia
de los conjuntos difusos inferidos al presentar algún tipo de discontinuidad. En el
caso concreto que nos ocupa, I8 presenta el citado problema cuando la forma del
conjunto difuso del consecuente es triangular, como efectivamente ocurre en las
tres aplicaciones empleadas.
Al pie de cada tabla se muestran los valores de ECM máximo y mínimo de la
tabla. Esto nos permitirá calcular de forma sencilla, con la expresión del grado de
error mostrada en la Sección 3.3, el valor concreto para cualquier combinación a
partir del grado contenido en la tabla.
En las tablas se ha señalado en negrita el valor máximo y en cursiva el mínimo
para poder observar más rápidamente las combinaciones que mejor y peor
resultado han obtenido.
La Tabla 5.2 muestra los valores de MGA_D para cada una de las tres
aplicaciones junto con el promedio para todas ellas, PMGA_D. En ella se
encuentran señalado con negrita el valor máximo y con cursiva el mínimo.
Finalmente, la Tabla 5.3 contiene los valores medios de las distintas familias de
métodos de defuzzificación en base a la taxonomía de la forma de trabajo.
Estudio de los Métodos de Defuzzificación
152
MGA_DF2
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D34
MGA_DE1
MGA_DE2
Modo A – FATI
Agregación con mínimo (MAR)
0.88602
0.94362
0.94373
0.84729
0.92383
0.92738
0.41417
0.88370
0.86596
0.39232
0.44195
0.49566
0.83926
0.91738
0.92469
0.85977
0.93330
0.93757
0.77355
0.82403
0.80122
0.88602
0.94362
0.94373
0.60712
0.91836
0.89690
Agregación con máximo (FLR)
0.89387
0.94281
0.94060
0.86341
0.92753
0.93051
0.48614
0.89924
0.85975
0.49025
0.48909
0.48367
0.87524
0.92998
0.93979
0.87660
0.93698
0.93957
0.68205
0.66458
0.62117
0.89387
0.94281
0.94060
0.57374
0.90817
0.89315
Modo B – FITA
Sumas ponderadas por Grados de Importancia
0.84473
0.92072
0.91475
0.85514
0.92904
0.92434
0.91761
0.95528
0.95761
0.88380
0.94441
0.93886
0.89572
0.95429
0.94863
0.99072
0.99345
0.99452
Conjuntos Difusos del Mayor Grado de Importancia
0.85210
0.92168
0.92397
0.84402
0.93630
0.95776
0.92411
0.95625
0.97234
0.88103
0.93663
0.93334
0.86897
0.95658
0.97142
0.98323
0.98705
0.99368
Otros
0.97228
0.99024
0.98149
0.97831
0.99193
0.99135
0.84477
0.92071
0.91470
0.99138
0.99423
0.99363
PMGA_D
0.92446
0.89950
0.72128
0.44331
0.89378
0.91021
0.79960
0.92446
0.80746
0.92576
0.90715
0.74838
0.48767
0.91501
0.91772
0.65593
0.92576
0.79169
0.89340
0.90284
0.94350
0.92236
0.93288
0.99290
0.89925
0.91269
0.95090
0.91700
0.93232
0.98799
0.98133
0.98720
0.89339
0.99308
Tabla 5.2.a. MGA_D para cada aplicación y PMGA_D conjunto
para los métodos de defuzzificación no paramétricos D1 a D34
Estudio Experimental
153
MGA_DF2
D35
D36
D37
D38
D39
D40
D41
0.85538
0.86560
0.85720
0.86359
0.85578
0.88635
0.83984
D42
D43
D44
D45
D46
D47
D48
0.87216
0.87702
0.87106
0.87962
0.86538
0.88870
0.84988
D49
0.99154
D50
D51
0.97920
0.98085
MGA_DE1
MGA_DE2
Modo A – FATI
Agregación con mínimo (MAR)
0.92784
0.93432
0.92952
0.93219
0.92882
0.91389
0.92232
Agregación con máximo (FLR)
0.93164
0.93388
0.93106
0.93523
0.92814
0.91560
0.92409
Modo B – FITA
0.99437
Modo Mixto
0.98714
0.98700
PMGA_D
0.93253
0.93744
0.93337
0.93663
0.93234
0.90759
0.91575
0.90525
0.91245
0.90670
0.91080
0.90564
0.90261
0.89263
0.93531
0.93755
0.93482
0.93849
0.93213
0.90776
0.91803
0.91304
0.91615
0.91231
0.91778
0.90855
0.90402
0.89733
0.99364
0.99318
0.97762
0.97470
0.98132
0.98085
Tabla 5.2.b. MGA_D para cada aplicación y
PMGA_D conjunto para los métodos paramétricos D35 a D51
No Paramétricos
Modo A
Modo B
mínimo
máximo
0.81378
0.80834
0.94019
0.81106
Paramétricos
Modo A
Modo B
mínimo
máximo
0.90516
0.90988
0.99318
0.90752
Mixto
0.98108
Tabla 5.3. Media del PMGA_D para los dos
modos de trabajo de los métodos de defuzzificación
Observando las Tablas 5.2 y 5.3, podemos apreciar los siguientes aspectos:
•
En lo referente a los métodos de defuzzificación no paramétricos, se
confirman las siguientes conclusiones realizadas en el Capítulo 3 y se
obtienen algunas nuevas:
o
Se percibe claramente en la Tabla 5.3, que los métodos no
paramétricos del Modo B – FITA presentan mejores resultados en
media que los no paramétricos del Modo A – FATI.
o
En el grupo de los métodos que trabajan en Modo B – FITA, los
basados en el Punto de Máximo Valor como valor característico y en el
grado de emparejamiento como grado de importancia (D24 y D30)
Estudio de los Métodos de Defuzzificación
154
siguen encontrándose entre los tres que mejores resultados muestran.
Un nuevo método que no se empleó en la experimentación del
Capítulo 3 sobresale sobre ellos: el Método de Calidad (D34). Si
observamos la expresión del método D34, veremos que es de la misma
naturaleza, ya que también utiliza el Punto de Máximo Valor del
conjunto difuso así como el grado de emparejamiento hi. Por tanto, se
confirma y refuerza la idoneidad del valor característico Punto de
Máximo Valor y del grado de emparejamiento como medida de
importancia.
•
o
Se observa que los métodos que manifiestan bajos valores medios al
combinarse con distintos operadores de implicación presentan buenos
resultados en determinadas combinaciones. Por ejemplo, D3 y D4
tienen valores muy bajos en el PMGA_D de la Tabla 5.2. En ocasiones
tienen asociado el grado 0 (es decir, el peor comportamiento de todas
las combinaciones estudiadas) en las Tablas 5.7, 5.8 y 5.9. Sin
embargo, la combinación de D3 y D4 con I1 ó I6 presenta buenos
resultados. Estas características fueron ampliamente estudiadas en el
Capítulo 4 desde el punto de vista de los operadores de implicación: I1
e I6 son S-implicaciones y, por ello, son adecuados en combinación con
el Modo A – FATI agregando al modo MAR y empleando la Media de
los Máximos (MOM). D3 y D4 efectivamente trabajan en Modo A –
FATI agregando con mínimo y, concretamente, D3 hace uso del valor
más alto más a la izquierda (FOM, similar al MOM) y D4 del más alto
más a la derecha (LOM, también similar al MOM).
o
En el Capítulo 3 se utilizaron dos estrategias de defuzzificación en el
Modo A – FATI, el MOM y el CG, las cuales daban lugar a cuatro
métodos de defuzzificación. Con estos cuatro métodos se observó que
los que agregaban en la modalidad MAR (mínimo) presentaban
mejores resultados que los que lo hacían al estilo FLR (máximo). En
la presente experimentación, donde se han añadido siete nuevos
mecanismos más para defuzzificar y por tanto se cuenta con un total
de dieciocho métodos de defuzzificación en Modo A – FATI, esta
conclusión se confirma a la vista de la Tabla 5.3 aunque las
diferencias no son muy significativas. Podemos decir que los estilos
clásicos de defuzzificación, MOM y CG, muestran las mismas
características en combinación con la agregación al modo MAR o FLR
que otros estilos de defuzzificación más sofisticados y novedosos.
Observando los resultados medios de los PMGA_D de los métodos
paramétricos en la Tabla 5.3, podemos ver que se siguen manteniendo las
diferencias entre los del Modo B – FITA y los del Modo A – FATI a favor de
los primeros como en el caso de los no paramétricos. El Modo Mixto presenta
un buen resultado, casi tan bueno como el Modo B – FITA, pero no mejora e
éste en los promedios. Este resultado era previsible pues, como se muestra
Estudio Experimental
155
en la Tabla 5.1, el autor recomienda el uso de λ = 0.25, lo cual significa que
da un peso del 25% al CG (Modo A – FATI) y un peso del 75% al QM (Modo B
– FITA). Por tanto, su conducta final está más cerca del mejor
comportamiento del método QM, D34, que del comportamiento de los basados
en CG, D2 y D11. En cualquier caso, es importante destacar que este método
mixto puede mejorar en combinaciones concretas a otros del Modo B – FITA
como puede observarse en la Tabla 5.7 donde obtiene el mejor resultado,
grado 1, para la aplicación del modelado difuso de F2 al combinarse con el
operador producto lógico I10 en su modalidad FLR.
Finalmente, en lo que respecta a los resultados globales, podemos extraer las
conclusiones siguientes:
1. La aplicación F2 provoca las mayores diferencias entre los grados medios
asociados a los distintos métodos de defuzzificación sometidos a esta
experimentación.
2. El mejor de los métodos de esta experimentación es el método del Modo B –
FITA QM paramétrico, D49, el cual deriva del propio QM en su versión no
paramétrica (D34), mejorándolo muy levemente. Se trata, como se ha dicho en
párrafos precedentes, de un método del Modo B – FITA que se basa en el
Punto de Máximo Valor y utiliza la información del grado de
emparejamiento.
3. Comparando ahora los resultados de los métodos no paramétricos en relación
con los paramétricos en la Tabla 5.3, observamos que los paramétricos
mejoran a su correspondiente familia y subfamilia en el caso no paramétrico
y por tanto cumplen con el objetivo de constituir mejores métodos de
defuzzificación en promedio. Sin embargo, los métodos paramétricos del
Modo A – FATI no llegan a mejorar la media de los no paramétricos del Modo
B – FITA. En este sentido, cabe destacar que ni siquiera en la Tabla 5.2
pueden observarse métodos del Modo A – FATI que puedan equipararse en
resultado a los mejores en el MGA_D para una sola aplicación. Es posible
encontrar combinaciones concretas que empleen métodos paramétricos del
Modo A – FATI con buenos resultados en las Tablas 5.7, 5.8 y 5.9, si bien
igualmente se pueden encontrar combinaciones que empleen métodos no
paramétricos con buenos resultados también.
156
Estudio de los Métodos de Defuzzificación
5.5 Una Nueva Propuesta de
Defuzzificación Paramétricos
Métodos
de
En esta sección se va a realizar una propuesta propia de un nuevo modelo de
defuzzificación paramétrica el cual que llevará asociado una serie de métodos. En
primer lugar se procederá a presentar la nueva propuesta para realizar
posteriormente una comparación práctica de los métodos de defuzzificación
paramétricos resultantes de la misma con los métodos de defuzzificación existentes.
5.5.1 Presentación de la Nueva Propuesta
Considerando los resultados y conclusiones obtenidos en la Sección 5.4, el perfil
de un método de defuzzificación que presente buen comportamiento comprenderá
los siguientes aspectos:
•
Trabajará en el Modo B – FITA, ya que éste es más general que el Modo A –
FATI.
•
Empleará el grado de emparejamiento como valor de importancia puesto que
se ha mostrado como el más general, es decir, el más apropiado en todas las
circunstancias.
•
Considerará el Punto de Máximo Valor como valor característico, al ser éste
más general que el CG en la mayoría de los casos.
Se destaca también que este perfil coincide con un resultado importante que se
obtuvo en el Capítulo 4, en relación con las características deseables de un buen
método de defuzzificación: los métodos que trabajan en Modo B – FITA y que usan
el PMV como valor característico y el grado de emparejamiento como valor de
importancia pueden subsanar la no verificación de cualquier propiedad básica, o
incluso, de un par de ellas.
Tanto los resultados de la Sección 5.4 como el del Capítulo 4 apuntan en el
mismo sentido sobre cuál es el perfil de un buen método de defuzzificación. En la
literatura especializada sólo el método de defuzzificación QM utiliza un
planteamiento similar. Esto nos sugiere realizar nuestra propia propuesta que
consistirá en combinar estos principios con la posibilidad de ajuste paramétrico de
la expresión del método.
En definitiva, nos planteamos realizar una propuesta propia de método de
defuzzificación paramétrico. Como se ha indicado anteriormente, el nuevo método
debe trabajar en Modo B – FITA, utilizar el grado de emparejamiento como valor
de importancia y, en casi todas las circunstancias, el PMV como valor
Una Nueva Propuesta de Métodos de Defuzzificación Paramétricos
157
característico, aunque el CG podría ser adecuado en algunas otras. Así, el nuevo
método de defuzzificación debería tener la siguiente forma:
N
y0 =
∑ f ( hi ) ⋅ Gi
i
N
∑ f ( hi )
i
donde hi es el grado de emparejamiento, f(hi) es un funcional del mismo, y Gi es el
Punto de Máximo Valor.
En determinados casos, como indicábamos anteriormente, también esta otra
forma puede ser interesante:
N
y0 =
∑ f ( hi ) ⋅ Wi
i
N
∑ f ( hi )
,
i
donde Wi es el CG.
El siguiente paso consiste en la definición del funcional f(hi), para el cual, sin
ninguna pérdida de generalidad, se propone:
f ( hi ) = hiα ,
donde α es el parámetro.
Por tanto se obtienen los dos siguientes métodos de defuzzificación:
N
1. D52 =
∑ hiα ⋅ Gi
i
N
∑ hi
,
α
i
N
2. D53 =
∑ hiα ⋅ Wi
i
N
∑ hi
,
α
i
los cuales son dos nuevos métodos de defuzzificación con un solo parámetro. Se
podría decir que el parámetro α juega un papel de variación o modulación de la
intensidad del grado de emparejamiento.
Estudio de los Métodos de Defuzzificación
158
Si en lugar de emplear un funcional con un solo parámetro α se extendiese esta
filosofía a funcionales con múltiples parámetros αi con i∈{1,N}, donde N es el
número de reglas de la BC, obtendríamos nuevos métodos de defuzzificación con
múltiples parámetros. En este caso, los múltiples parámetros αi jugarían un papel
de regulación de la intensidad del grado de emparejamiento de cada regla, es decir,
modifican la importancia o peso de cada regla para el resultado final [YT97]. De tal
forma, podría decirse que la introducción de múltiples parámetros es una actuación
que se encuentra más próxima a la introducción de un nuevo dato en la BC que de
un método de defuzzificación en sí, puesto que el valor del parámetro de cada regla
es un valor muy ligado a la BC y no al modo de operar del Interfaz de
Defuzzificación.
En la experimentación se van a utilizar los dos siguientes funcionales para el
empleo de múltiples parámetros:
f ( hi ) = hiα i ,
f ( hi ) = hi ⋅ α i .
El primero de ellos es una extensión directa del funcional propuesto
inicialmente. El segundo utiliza el producto en lugar de la potencia1.
La mejora de la eficacia del SBRD con múltiples parámetros será notable como
se verá en la Sección 5.5.3 pues aumentan sus grados de libertad.
Los cuatro métodos de defuzzificación con múltiples parámetros resultantes de
utilizar estos dos funcionales son:
N
3. D54 =
∑ hiα
i
i
N
∑ hi
⋅ Gi
,
αi
i
N
4. D55 =
∑ hiα
i
N
i
⋅ Wi
∑ hiαi
,
i
1
Nótese que el funcional producto no puede emplearse en el caso de un solo parámetro
N
porque éste se anula:
N
∑ hi ⋅ α ⋅ Gi ∑ hi ⋅ Gi
i
=
N
∑ hi
i
i
⋅α
i
N
∑ hi
i
i
Una Nueva Propuesta de Métodos de Defuzzificación Paramétricos
159
N
5. D56 =
∑ hi ⋅ αi ⋅ Gi
i
N
∑ hi i ⋅ αi
,
i
N
6. D57 =
∑ hi ⋅ αi ⋅ Wi
i
N
∑ hi ⋅ αi
.
i
5.5.2 Métodos Evolutivos de Aprendizaje de Parámetros
Los métodos de defuzzificación paramétricos precisan de técnicas de ajuste de
parámetros. En el caso de los dos métodos que contienen un solo parámetro se ha
decidido utilizar una Estrategia de Evolución 1+1 (EE-(1+1)). Para el caso de los
cuatro métodos que disponen de tantos parámetros como reglas existen en la BC, se
ha optado por emplear Algoritmos Genéticos (AGs). Ambas técnicas son descritas
un el Apéndice B del presente capítulo.
En la EE-(1+1) se ha utilizado como condición de parada el hecho de permanecer
durante 200 iteraciones sin mejora. La solución de la que se parte en la EE-(1+1) se
ha obtenido fijando α = 1 para que el nuevo método de defuzzificación equivalga al
método de defuzzificación no paramétrico del que procede.
En el caso del AG han empleado tantos genes como reglas existen en la BC
considerada en cada aplicación, ya que corresponde un parámetro por cada regla.
Para nuestro problema de ajuste de parámetros hemos empleado codificación real.
El número de generaciones utilizadas ha sido de 100 con una longitud de población
de 31 elementos. El esquema de selección empleado ha sido generacional con
mecanismo de asignación de probabilidades de orden lineal y mecanismo de
selección de Baker, junto con un esquema elitista.
El operador de cruce utilizado ha sido el Max-Min Aritmético. La probabilidad
de cruce empleada ha sido de 0.6.
El operador de mutación empleado ha sido el no uniforme que se procede a
describir a continuación. Supuesto que C=(c1,..., ci,..., cn) es un cromosoma y ci =
[ai,bi] es el elemento a mutar. Si se supone que este operador se aplica durante una
generación t y que T es el máximo número de generaciones, entonces se genera el
siguiente gen:
c + ∆( t, bi − ci ), si β = 0
c'i = i
,
ci − ∆ ( t , ci − ai ), si β = 1
Estudio de los Métodos de Defuzzificación
160
donde β es un número aleatorio que puede valor cero o uno, y
∆( t, y ) = y( 1 − r
( 1−
t b
)
T
),
donde r es un número aleatorio del intervalo [0,1] y b es un parámetro elegido por
el usuario, que determina el grado de dependencia con el número de iteraciones. La
función ∆(⋅,⋅) devuelve un valor en el rango [0,y] de forma que la probabilidad de
devolver un número cercano a cero crece conforme t es mayor. De esta forma, el
intervalo de generación de genes es más pequeño, y una búsqueda local en las
etapas finales, favoreciendo el ajuste local. La probabilidad de mutación empleada
ha sido de 0.1.
Como en el caso de la EE-(1+1), el primer individuo del AG se ha generado
haciéndolo coincidir con el método de defuzzificación no paramétrico del que
procede, esto es, con los valores de los parámetros inicializándolos a 1. Los demás
se han inicializado aleatoriamente.
El espacio de búsqueda de los parámetros se ha limitado al intervalo [0, 5] tanto
para la EE-(1+1) como para el AG. Este intervalo se justifica tras el siguiente
estudio por zonas:
•
En el caso del funcional hiα :
o
o
o
o
hiα , α∈ [1,∞):
hiα , α∈ [0,1]:
hiα , α∈ [-1,0]:
hiα , α∈ (-∞,-1]:
penalización leve del valor de hi,
potenciación leve del valor de hi,
potenciación fuerte del valor de hi,
potenciación fuerte del valor de hi.
Tomando los casos, α∈ [1,∞) ∪ α∈ [0,1] se consigue tanto penalizar como
potenciar el valor del grado de emparejamiento. Se ha utilizado el intervalo
[0,5], lo cual limita la penalización razonablemente pero también reduce el
espacio de búsqueda. Este hecho permitirá obtener mayor precisión en un
número menor de iteraciones del algoritmo de aprendizaje.
•
En el caso del funcional α ⋅ hi :
o
o
o
o
α ⋅ hi , α∈ [1,∞):
α ⋅ hi , α∈ [0,1]:
α ⋅ hi , α∈ [-1,0]:
α ⋅ hi , α∈ (-∞,-1]:
potenciación fuerte del valor de hi,
penalización fuerte del valor de hi,
penalización fuerte del valor de hi,
penalización fuerte del valor de hi.
Tomando los casos, αi ∈ [1,∞) ∪ αi ∈ [0,1] se consigue tanto penalizar como
potenciar de nuevo el valor del grado de emparejamiento. El intervalo
utilizado, [0,5], limita la potenciación y reduce el espacio de búsqueda en
Una Nueva Propuesta de Métodos de Defuzzificación Paramétricos
161
beneficio de la precisión y la velocidad de convergencia del algoritmo de
aprendizaje.
Finamente la función de adaptación estará basada en el ECM cometido sobre el
conjunto de entrenamiento. El conjunto de prueba, en cambio, no será considerado
durante la fase de aprendizaje para poder así emplearlo en la validación.
5.5.3 Resultados del Ajuste de Parámetros en la Nueva
Propuesta
Como se indicó anteriormente, se ha empleado una EE para el ajuste del
parámetro en los dos métodos de defuzzificación de un solo parámetro propuestos,
mientras que se ha hecho uso de un AG para el aprendizaje de los N parámetros de
cada uno de los cuatro métodos de defuzzificación multi-paramétricos.
Para llevar a cabo el aprendizaje de los parámetros en los seis nuevos métodos
en la experimentación realizada, se ha empleado siempre el operador de conjunción
producto lógico (mínimo). En cuanto a los operadores de implicación se han
empleado los siete operadores de implicación utilizados en el estudio experimental
realizado en la Sección 5.4 del presente capítulo. De igual modo, las aplicaciones
empleadas son las mismas que fueron utilizadas anteriormente en este capítulo: el
modelado difuso de la superficie tridimensional F2 y los dos problemas eléctricos, el
de la longitud real de la línea de baja tensión en núcleos rurales E1 y el de los costes
óptimos teóricos de la línea de media tensión en núcleos urbanos E2, los cuales se
detallan en el Apéndice II de la presente memoria. De este modo, los seis nuevos
métodos de defuzzificación van a ser utilizados en las mismas condiciones que lo
fueron con anterioridad los del estudio de la Sección 5.4.
Las Tablas 5.4, 5.5 y 5.6 muestran los resultados obtenidos para el modelado de
F2 , E1 y E2 respectivamente. Cada una de estas tablas contiene dos tipos de
información:
•
El ECM de cada uno de los siete operadores de implicación con los métodos
de defuzzificación D21 (Modo B – FITA CG ponderado por el grado de
emparejamiento) y D24 (Modo B – FITA PMV ponderado por el grado de
emparejamiento). Esta información constituye las cuatro primeras filas
horizontales de cada tabla distribuidas de la siguiente forma: Las dos
primeras corresponden a D21, tanto sobre el conjunto de datos de
entrenamiento (señalado en las tablas como EEnt.) como sobre el conjunto de
prueba (indicado como EPru.) y de igual forma las dos siguientes filas
corresponden a D24. Estos resultados corresponden a los métodos de
defuzzificación con los parámetros fijados a 1 y se consideran como los
valores a mejorar.
Estudio de los Métodos de Defuzzificación
162
•
D21
D24
D52
D53
D54
D55
D56
D57
Valores de mejora alcanzados tras el aprendizaje de los parámetros con cada
uno de los seis métodos de defuzzificación propuestos en combinación con
cada uno de los siete operadores de implicación elegidos. Estos valores se
expresan en ECM y también en porcentaje de mejora en relación con el
método no paramétrico del que proceden (como se indicó en la Sección 5.5.1,
D52, D54 y D56 proceden de D24 (basado en PMV) mientras que D53, D55 y D57
proceden de D21 basado en CG). Los valores reflejados para cada
combinación son dobles ya que se muestra el resultado tanto con respecto al
conjunto de entrenamiento (línea horizontal señalada en la tabla como EEnt.)
como respecto al conjunto de prueba (indicada como EPru.).
EEnt.
EPru.
EEnt.
EPru.
EEnt. ECM
%
EPru. ECM
%
EEnt. ECM
%
EPru. ECM
%
EEnt. ECM
%
EPru. ECM
%
EEnt. ECM
%
EPru. ECM
%
EEnt. ECM
%
EPru. ECM
%
EEnt. ECM
%
EPru. ECM
%
I1
4.86688
4.2472
0.19548
0.0501
0.19480
0.34889
0.05236
-4.44399
4.40676
9.45401
3.82629
9.91092
0.09093
53.48216
0.06469
-29.02303
4.41121
9.36267
3.82881
9.85162
0.09786
49.93720
0.06183
-23.32868
4.85038
0.33893
4.22320
0.56588
I4
I6
0.19383
4.04442
0.0444
3.5200
0.19340
0.19340
0.0438
0.0438
0.19286
0.19286
0.27655
0.27655
0.04459
0.04459
-1.81147 -1.81147
0.19337
3.50255
0.24107
13.39798
0.04521
3.02099
-1.77792 14.17737
0.09087
0.09087
53.01213 53.01213
0.05479
0.05479
-25.10052 -25.10052
0.08726
3.50531
54.98087 13.32989
0.06327
3.01368
-42.44674 14.38506
0.09479
0.09479
50.98481 50.98481
0.05304
0.05304
-21.10510 -21.10510
0.09881
4.00565
49.02179
0.95856
0.05343
3.47939
-20.28794 1.15466
I8
0.23051
0.2169
0.23051
0.2169
0.22998
0.22932
0.21394
1.36706
0.22998
0.22932
0.21394
1.36706
0.12741
44.72735
0.22624
-4.30440
0.12741
44.72735
0.22624
-4.30440
0.13188
42.78921
0.23046
-6.24714
0.13188
42.78921
0.23046
-6.24714
I10
0.20987
0.0501
0.19340
0.0438
0.19286
0.27655
0.04459
-1.81147
0.20850
0.65076
0.04888
2.37609
0.09087
53.01213
0.05479
-25.10052
0.11228
46.49837
0.05899
-17.81553
0.09479
50.98481
0.05304
-21.10510
0.09601
54.25245
0.05763
-15.10569
I18
4.86957
4.2708
1.61569
1.4356
0.72864
54.90198
0.54898
61.76099
4.33618
10.95349
3.78312
11.41917
0.68955
57.32122
0.57219
60.14428
4.34099
10.85476
3.78622
11.34662
1.56182
3.33404
1.38428
3.57827
4.85433
0.31307
4.25974
0.25929
Tabla 5.4. Resultados del aprendizaje en el modelado difuso de F2.
I36
4.35403
3.8517
0.23454
0.1887
0.23290
0.69568
0.19564
-3.68826
3.39838
21.94867
2.94004
23.66886
0.14777
36.99570
0.16915
10.35038
3.40423
21.81421
2.94431
23.55784
0.18637
20.53476
0.18547
1.69906
4.33815
0.36466
3.83246
0.49924
Una Nueva Propuesta de Métodos de Defuzzificación Paramétricos
I1
2427093.1
D21 EEnt.
2395858.7
EPru.
222191.81
D24 EEnt.
238228.36
EPru.
EEnt. ECM 220189.34
0.90123
D52
%
EPru. ECM 227102.84
4.67011
%
EEnt. ECM 2197797.9
D53
9.44732
%
EPru. ECM 2229346.3
6.95001
%
EEnt. ECM 193624.02
D54
12.85726
%
EPru. ECM 228819.38
3.94956
%
EEnt. ECM 2199573.6
9.37415
D55
%
EPru. ECM 2230896.2
6.88532
%
EEnt. ECM 203828.14
D56
8.26478
%
EPru. ECM 219502.23
7.86058
%
EEnt. ECM 2386639.6
D57
1.66675
%
EPru. ECM 2364484.0
1.30954
%
I4
222484.07
240095.84
222764.49
241085.36
218984.18
1.69700
224744.33
6.77811
218765.82
1.67124
223821.47
6.77828
191022.09
14.24931
234789.75
2.61136
193535.57
13.01150
236609.45
1.45209
204360.08
8.26182
232997.09
3.35494
203918.16
8.34483
224908.51
6.32553
I6
2037621.0
2013900.9
222764.49
241085.36
218984.18
1.69700
224744.33
6.77811
1764705.9
13.39381
1812044.0
10.02318
191022.09
14.24931
234789.75
2.61136
1765450.5
13.35727
1809472.6
10.15086
204360.08
8.26182
232997.09
3.35494
1984532.1
2.60543
1972096.2
2.07581
I8
222764.49
241085.36
222764.49
241085.36
218984.18
1.69700
224744.33
6.77811
218984.18
1.69700
224744.33
6.77811
191022.09
14.24931
234789.75
2.61136
191022.09
14.24931
234789.75
2.61136
204360.08
8.26182
232997.09
3.35494
204360.08
8.26182
232997.09
3.35494
163
I10
223017.45
239091.68
222764.49
241085.36
218984.18
1.69700
224744.33
6.77811
221528.64
0.66758
229589.19
3.97441
191022.09
14.24931
234789.75
2.61136
194786.98
12.65841
232816.51
2.62459
204360.08
8.26182
232997.09
3.35494
205302.49
7.94331
223908.40
6.35040
I18
2441388.2
2441245.4
948870.31
1097145.3
453102.34
52.24823
687453.77
37.34159
2175510.4
10.89044
2250089.0
7.83028
454673.04
52.08270
637576.26
41.88771
2177803.0
10.79653
2251753.6
7.76209
868887.89
8.42923
999591.44
8.89161
2400878.4
1.65929
2409908.7
1.28363
Tabla 5.5. Resultados del aprendizaje en el modelado difuso de E1.
I36
2225414.9
2188529.5
293713.16
285233.13
293195.74
0.17617
279424.88
2.03631
1726062.3
22.43863
1801550.9
17.68213
265454.57
9.62115
282474.42
0.96718
1731565.6
22.19133
1802491.2
17.63916
270989.95
7.73653
262369.85
8.01565
2147896.3
3.48333
2143310.1
2.06620
Estudio de los Métodos de Defuzzificación
164
I1
3241108.7
D21 EEnt.
3087677.0
EPru.
75413.909
D24 EEnt.
83764.269
EPru.
EEnt. ECM 69333.413
D52
8.06283
%
EPru. ECM 75977.169
9.29645
%
EEnt. ECM 2348203.4
27.54938
D53
%
EPru. ECM 2286331.5
25.95302
%
EEnt. ECM 48143.087
D54
36.16153
%
EPru. ECM 55400.409
33.86153
%
EEnt. ECM 2354463.7
D55
27.35622
%
EPru. ECM 2291628.0
25.78149
%
52384.858
EEnt. ECM
D56
30.53688
%
EPru. ECM 59807.424
28.60032
%
EEnt. ECM 2619472.0
D57
19.17975
%
EPru. ECM 2573090.1
16.66583
%
I4
71381.040
81151.321
71483.377
81322.350
65925.376
7.77524
73068.302
10.14979
65819.582
7.79123
72885.988
10.18509
46019.498
35.62210
51985.941
36.07423
46257.763
35.19601
51679.678
36.31690
51743.158
27.61512
59358.541
27.00833
51336.429
28.08114
57915.567
28.63263
I6
2691268.1
2559428.3
71483.377
81322.350
65925.376
7.77524
73068.302
10.14979
1674853.3
37.76713
1634703.0
36.13015
46019.498
35.62210
51985.941
36.07423
1677824.0
37.65675
1636307.3
36.06747
51743.158
27.61512
59358.541
27.00833
2012441.2
25.22331
1998901.5
21.90047
I8
123127.18
122910.73
123127.18
122910.73
117569.18
4.51403
114656.68
6.71548
117569.18
4.51403
114656.68
6.71548
97663.305
20.68096
93574.324
23.86806
97663.305
20.68096
93574.324
23.86806
103384.56
16.03433
100929.54
17.88387
103384.56
16.03433
100929.54
17.88387
I10
81133.580
87556.853
71483.377
81322.350
65925.376
7.77524
73068.302
10.14979
65510.605
19.25587
71518.256
18.31792
46019.498
35.62210
51985.941
36.07423
45811.767
43.53538
51675.172
40.98101
51743.158
27.61512
59358.541
27.00833
48539.285
40.17362
53338.487
39.08131
I18
3182706.3
3060658.8
1568849.1
1610531.8
459329.09
70.72191
494956.78
69.26749
2223651.0
30.13333
2196321.7
28.24023
461423.99
70.58838
491165.61
69.50289
2230744.0
29.91047
2202904.5
28.02515
886690.53
43.48147
947761.87
41.15224
2542314.5
20.12098
2538496.8
17.06044
I36
3440322.2
3267227.2
252091.43
237859.29
221374.67
12.18477
208427.88
12.37346
1579335.1
54.09339
1567549.5
52.02202
189448.04
24.84947
172074.83
27.65688
1591775.7
53.73178
1575951.1
51.76487
215203.71
14.63267
209537.26
11.90705
2244855.1
34.74869
2271142.7
30.48715
Tabla 5.6. Resultados del aprendizaje en el modelado difuso de E2.
5.5.4 Análisis de Resultados
A partir de las tablas de la Sección 5.5.3, se pueden obtener las siguientes
conclusiones:
•
En líneas generales, los métodos de defuzzificación paramétricos propuestos
han mejorado los resultados con relación a los métodos de defuzzificación no
paramétricos de los que proceden utilizando el aprendizaje de los
parámetros mediante Algoritmos Evolutivos.
•
En todos los casos, el Algoritmo Evolutivo ha conseguido mejorar el ECM
sobre los conjuntos de entrenamiento.
•
En lo que respecta al poder de generalización de los modelos difusos
obtenidos, es decir, al error cuadrático sobre los conjuntos de prueba, se
Una Nueva Propuesta de Métodos de Defuzzificación Paramétricos
165
obtuvieron mejoras en los problemas eléctricos, E1 y E2, con resultados muy
destacados en la segunda. En cambio, en el caso del modelado de la función
F2 se empeora el ECM en algunas ocasiones. Esto es debido a un problema
ampliamente conocido llamado sobreaprendizaje y que consiste en que una
excesiva adaptación del modelo al conjunto de entrenamiento produce un
alejamiento sobre el conjunto de prueba haciendo que el resultado sea
menos general.
•
Cuando se produce sobreaprendizaje, se da predominantemente en los
métodos de defuzzificación multi-paramétricos. Este resultado es coherente
desde el punto de vista de que estos métodos de defuzzificación presentan
más grados de libertad que los mono-paramétricos, lo que da lugar a que se
puedan ajustar en mayor medida al conjunto de entrenamiento, siendo así
más sensibles a este fenómeno.
•
En algunas combinaciones se pueden encontrar porcentajes de mejora muy
altos. Un caso destacado es el que se da en algunas combinaciones tales
como la del I10 y D55, fundamentalmente en la aplicación E2
(aproximadamente un 40% de mejora) y, en menor medida, en la E1. En este
caso, la mejora que produce el método paramétrico sobre el método original
no paramétrico permite superar el resultado obtenido por la mejor
combinación no paramétrica que constituyen el mismo operador de
implicación I10, y el método de defuzzificación D24. Por tanto, los métodos
paramétricos propuestos no sólo consiguen mejorar en muchos casos los
métodos no paramétricos de los que proceden aunque éstos sean ya de los
que mejores resultados muestren sino que también pueden mejorar otras
combinaciones no paramétricas mejores que las que forman parte de su
construcción inicial.
Aún así, no siempre los altos porcentajes de mejora significan que se ha
obtenido una combinación con muy buen comportamiento. Esto ocurre, por
ejemplo, con la combinación de I18 y D52 donde las cifras de mejora son
aproximadamente del 70% en el problema E2. Sin embargo, dado que la
combinación de partida con respecto a la cual se mide la mejora (I18 y D23 )
no es una de las de mayor rendimiento, el ECM tras el ajuste de parámetros
continúa situándose bastante lejos de otras combinaciones que presentan
buen comportamiento aún sin utilizar el método paramétrico.
166
Estudio de los Métodos de Defuzzificación
5.6 Conclusiones
En este capítulo se partió del conocimiento de la importancia de la
compatibilidad entre los operadores de implicación y los métodos de defuzzificación,
obtenido en el Capítulo 4. En dicho capítulo se habían propuesto las propiedades
básicas que debía cumplir un operador de implicación para ser robusto, pero
también se demostró que determinados métodos podían conseguir que operadores
no robustos pudiesen formar parte del diseño de SBRDs con buenos resultados
prácticos. Se conocían cuáles eran esas características que hacían que un método de
defuzzificación pudiese actuar de ese modo. Por ese motivo, se procedió a un
estudio detallado de los métodos de defuzzificación propuestos en la literatura que
incluía una comprobación de sus habilidades prácticas. Se observó que en el muy
amplio espectro de propuestas, muy pocos cumplían esas características que
comenzaron a descubrirse en el Capítulo 3 y que se concretaron en el Capítulo 4.
De hecho, es una creencia ampliamente difundida la de considerar como un arte o
algo empírico la defuzzificación y de ahí la amplísima proliferación de métodos de
defuzzificación propuestos en la literatura. Por tal motivo en este capítulo se ha
llevado a cabo la propuesta de un grupo de nuevos métodos de defuzzificación que
cumplen estos requerimientos, al tiempo que se acompañan de una recomendación
en cuanto a los algoritmos de aprendizaje que pueden emplearse para el proceso de
ajuste de sus parámetros.
Los métodos paramétricos propuestos y los Algoritmos Evolutivos empleados
para el aprendizaje de sus parámetros se han mostrado adecuados para tratar de
mejorar el comportamiento del SBRD en la experimentación llevada a cabo. Se
consigue una adaptación a la aplicación que optimiza el comportamiento del
sistema. Como se ha indicado, estos métodos están construidos teniendo en cuenta
las características que debe tener un método de defuzzificación para conseguir el
mejor comportamiento con cualquier operador de implicación incluso si éste no
cumple una o dos de las propiedades básicas, e independientemente de la
aplicación. Por tanto constituyen una buena opción de diseño.
Sin embargo, estos métodos de defuzzificación paramétricos pueden, en algunas
ocasiones, dar lugar al fenómeno de sobreaprendizaje en el diseño del modelo o
controlador difuso. Como se ha visto, esta posibilidad puede darse en mayor medida
en los métodos de defuzzificación multi-paramétricos, ya que estos presentan un
mayor número de grados de libertad, lo que les puede llevar a ajustarse
excesivamente al conjunto de entrenamiento. Además, cabe destacar que este tipo
de métodos pierden en cierto grado la filosofía de métodos de defuzzificación,
Conclusiones
167
convirtiéndose en procesos de ponderación de reglas, si bien permiten obtener
mejores resultados en la práctica.
Estudio de los Métodos de Defuzzificación
168
Apéndice A: Resultados Parciales
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D34
I1
0.98470
0.85831
0.97979
0.98164
0.84136
0.88999
0.64730
0.98470
0.35138
0.80397
0.80397
0.00000
0.00380
0.80397
0.80387
0.60843
0.80397
0.80397
0.80462
0.80568
0.84785
0.82248
0.83026
0.99934
0.80397
0.80397
0.86428
0.80397
0.80397
0.98400
0.98440
0.98307
0.80462
0.99934
I4
0.93189
0.93151
0.53147
0.37382
0.93149
0.93233
0.91937
0.93189
0.56159
0.80397
0.80397
0.00000
0.00380
0.80397
0.80387
0.60843
0.80397
0.80397
0.80976
0.83225
0.99955
0.80976
0.83226
0.99957
0.80397
0.77581
0.98467
0.80397
0.77583
0.98466
0.98912
0.98623
0.80976
0.99959
I6
0.98762
0.88198
0.97377
0.98708
0.85079
0.92468
0.66302
0.98762
0.31784
0.80397
0.80397
0.00000
0.00380
0.80397
0.80387
0.60843
0.80397
0.80397
0.80586
0.80751
0.87410
0.82504
0.83226
0.99957
0.80397
0.80376
0.89307
0.80397
0.77583
0.98466
0.98912
0.98623
0.80586
0.99957
I8
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
0.80910
0.83202
0.99332
0.80910
0.83202
0.99332
0.80397
0.77583
0.97794
0.80397
0.77583
0.97794
0.98812
0.98472
0.80910
0.99792
I10
0.80397
0.80397
0.00000
0.00380
0.80397
0.80387
0.80387
0.80397
0.80397
0.98466
0.99897
0.97738
0.98157
0.97553
0.99823
0.91936
0.98466
0.39768
0.99882
0.99934
0.99934
0.99919
0.99957
0.99957
0.98467
0.98467
0.98467
0.98466
0.98466
0.98466
0.98912
0.98623
0.99916
0.99959
I18
0.80397
0.80397
0.00000
0.00380
0.80397
0.80387
0.80387
0.80397
0.80397
0.98460
0.86664
0.95739
0.96643
0.89227
0.89999
0.65806
0.98460
0.30974
0.83672
0.84700
0.84700
0.92881
0.94933
0.94933
0.86664
0.86664
0.86664
0.98460
0.98460
0.98460
0.88748
0.94542
0.83672
0.94933
I36
0.80397
0.80397
0.00000
0.00380
0.80397
0.80387
0.80387
0.80397
0.80397
0.98207
0.90291
0.98207
0.98207
0.97175
0.94978
0.68956
0.98207
0.32310
0.84823
0.86217
0.86213
0.99224
0.99435
0.99434
0.89749
0.89749
0.89749
0.98207
0.98207
0.98207
0.97857
0.97629
0.84819
0.99434
Tabla 5.7.a. GA_ECM en el problema F2 para los mét. def. no paramétricos D1 a D34
Apéndice A: Parámetros y Resultados Parciales
D35
D36
D37
D38
D39
D40
D41
D42
D43
D44
D45
D46
D47
D48
D49
D50
D51
I1
0.87984
0.90497
0.88218
0.90261
0.87642
0.98608
0.80457
0.80397
0.80397
0.80397
0.80397
0.80397
0.80387
0.80457
0.99934
0.99024
0.98641
I4
0.93163
0.93180
0.93168
0.93175
0.93165
0.93088
0.81761
0.80397
0.80397
0.80397
0.80397
0.80397
0.80387
0.81761
0.99958
0.99584
0.98663
I6
0.90893
0.94489
0.91744
0.93530
0.91468
0.98940
0.80570
0.80397
0.80397
0.80397
0.80397
0.80397
0.80387
0.80570
0.99957
0.99179
0.98645
169
I8
*
*
*
*
*
*
*
*
*
*
*
*
*
*
0.99901
*
*
I10
0.80397
0.80397
0.80397
0.80397
0.80397
0.80391
0.96703
0.99944
0.99915
0.99943
0.99858
0.99919
0.95242
0.99591
0.99958
0.98663
1.00000
I18
0.80397
0.80397
0.80397
0.80397
0.80397
0.80391
0.83431
0.88832
0.90492
0.88775
0.90731
0.87355
0.97746
0.84065
0.94933
0.92515
0.93362
I36
0.80397
0.80397
0.80397
0.80397
0.80397
0.80391
0.80979
0.93329
0.94612
0.92725
0.95991
0.90765
0.99072
0.83482
0.99434
0.98552
0.99196
Tabla 5.7.b. GA_ECM en el problema F2 para los
métodos de defuzzificación paramétricos D35 a D51.
El ECM máximo para toda la Tabla 5.7 es 27.73779 y el mínimo, 0.03187
Estudio de los Métodos de Defuzzificación
170
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D34
I1
0.98785
0.92194
0.98860
0.98392
0.90722
0.93855
0.61293
0.98785
0.92471
0.89952
0.89952
0.81748
0.00000
0.89952
0.90359
0.57698
0.89952
0.89952
0.90025
0.90109
0.91693
0.91932
0.92728
0.99954
0.89952
0.89952
0.92436
0.89952
0.89952
0.98773
0.99690
0.99402
0.90025
0.99954
I4
0.98602
0.98605
0.87678
0.68585
0.98606
0.98700
0.98640
0.98602
0.97039
0.89952
0.89952
0.81748
0.00000
0.89952
0.90359
0.57698
0.89952
0.89952
0.90627
0.92965
0.99947
0.90627
0.92964
0.99943
0.89952
0.94607
0.98775
0.89952
0.94607
0.98777
0.99926
0.99621
0.90627
0.99947
I6
0.98927
0.93640
0.98436
0.98194
0.91247
0.96348
0.63406
0.98927
0.91647
0.89952
0.89952
0.81748
0.00000
0.89952
0.90359
0.57698
0.89952
0.89952
0.90180
0.90331
0.93156
0.92250
0.92964
0.99943
0.89952
0.90876
0.94025
0.89952
0.94607
0.98777
0.99926
0.99621
0.90180
0.99943
I8
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
0.90551
0.92964
0.99943
0.90551
0.92964
0.99943
0.89952
0.94607
0.98777
0.89952
0.94607
0.98777
0.99926
0.99621
0.90551
0.99731
I10
0.89952
0.89952
0.81748
0.00000
0.89952
0.90359
0.90359
0.89952
0.89952
0.98777
0.99873
0.98551
0.98290
0.96353
0.99744
0.98159
0.98777
0.92664
1.00000
0.99951
0.99951
0.99993
0.99943
0.99943
0.98773
0.98773
0.98773
0.98777
0.98777
0.98777
0.99926
0.99621
0.99997
0.99947
I18
0.89952
0.89952
0.81748
0.00000
0.89952
0.90359
0.90359
0.89952
0.89952
0.98776
0.92406
0.97474
0.96888
0.92720
0.94050
0.61948
0.98776
0.91557
0.91162
0.91520
0.91520
0.95908
0.96666
0.96666
0.92406
0.92406
0.92406
0.98776
0.98776
0.98776
0.94334
0.97156
0.91162
0.96666
Tabla 5.8.a. GA_ECM en el problema E1 para los
métodos de defuzzificación no paramétricos D1 a D34
I36
0.89952
0.89952
0.81748
0.00000
0.89952
0.90359
0.90359
0.89952
0.89952
0.98277
0.94386
0.98277
0.98277
0.99062
0.97318
0.65547
0.98277
0.90823
0.91961
0.92488
0.92487
0.99826
0.99774
0.99774
0.94186
0.94186
0.94186
0.98277
0.98277
0.98277
0.99437
0.99306
0.91956
0.99774
Apéndice A: Parámetros y Resultados Parciales
D35
D36
D37
D38
D39
D40
D41
D42
D43
D44
D45
D46
D47
D48
D49
D50
D51
I1
0.93223
0.94769
0.93490
0.94363
0.93246
0.89940
0.90090
0.89952
0.89952
0.89952
0.89952
0.89952
0.89952
0.90090
0.99954
0.99382
0.98719
I4
0.98607
0.98607
0.98607
0.98607
0.98607
0.98595
0.91387
0.89952
0.89952
0.89952
0.89952
0.89952
0.89952
0.91383
0.99945
0.99878
0.99147
I6
0.95020
0.97360
0.95762
0.96487
0.95581
0.89940
0.90376
0.89952
0.89952
0.89952
0.89952
0.89952
0.89952
0.90375
0.99943
0.99484
0.98745
171
I8
*
*
*
*
*
*
*
*
*
*
*
*
*
*
0.99835
*
*
I10
0.89952
0.89952
0.89952
0.89952
0.89952
0.89952
0.99707
0.99822
0.99769
0.99832
0.99724
0.99861
0.99614
0.99974
0.99945
0.99280
0.99899
I18
0.89952
0.89952
0.89952
0.89952
0.89952
0.89952
0.91357
0.93372
0.94137
0.93352
0.94219
0.92622
0.89940
0.91485
0.96666
0.95071
0.96242
Tabla 5.8.b. GA_ECM en el problema E1 para los
métodos de defuzzificación paramétricos D35 a D51.
El ECM máximo para toda la Tabla 5.8 es 26345426.38068,
y el mínimo, 226260.16997
I36
0.89952
0.89952
0.89952
0.89952
0.89952
0.89952
0.90477
0.95932
0.96568
0.95596
0.97341
0.94545
0.89952
0.91146
0.99774
0.99190
0.99447
Estudio de los Métodos de Defuzzificación
172
D1
D2
D3
D4
D5
D6
D7
D8
D9
D10
D11
D12
D13
D14
D15
D16
D17
D18
D19
D20
D21
D22
D23
D24
D25
D26
D27
D28
D29
D30
D31
D32
D33
D34
I1
0.99573
0.94223
0.99045
0.99500
0.93866
0.96567
0.56124
0.99573
0.90834
0.88977
0.88977
0.74560
0.00000
0.88977
0.89349
0.54203
0.88977
0.88977
0.89032
0.89111
0.92401
0.91521
0.91980
0.99961
0.88977
0.88977
0.94545
0.88977
0.88977
0.99533
0.99315
0.99304
0.89032
0.99961
I4
0.99735
0.99575
0.96938
0.98005
0.99567
0.99609
0.98872
0.99735
0.92191
0.88977
0.88977
0.74560
0.00000
0.88977
0.89349
0.54203
0.88977
0.88977
0.90059
0.92133
0.99967
0.90059
0.92134
0.99967
0.88977
0.97863
0.99574
0.88977
0.97863
0.99574
0.99574
0.99562
0.90059
0.99966
I6
1.00000
0.95702
0.99912
0.99889
0.94452
0.98316
0.57688
1.00000
0.88182
0.88977
0.88977
0.74560
0.00000
0.88977
0.89349
0.54203
0.88977
0.88977
0.89171
0.89286
0.93730
0.91743
0.92134
0.99967
0.88977
0.94858
0.96177
0.88977
0.97863
0.99574
0.99574
0.99562
0.89171
0.99967
I8
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
*
0.90004
0.92131
0.99862
0.90004
0.92131
0.99862
0.88977
0.97863
0.99469
0.88977
0.97863
0.99469
0.99470
0.99458
0.90004
0.99987
I10
0.88977
0.88977
0.74560
0.00000
0.88977
0.89349
0.89349
0.88977
0.88977
0.99574
0.99939
0.98652
0.99306
0.98523
0.99981
0.94565
0.99574
0.92140
0.99882
0.99951
0.99951
0.99927
0.99967
0.99967
0.99574
0.99574
0.99574
0.99574
0.99574
0.99574
0.99574
0.99562
0.99928
0.99966
I18
0.88977
0.88977
0.74560
0.00000
0.88977
0.89349
0.89349
0.88977
0.88977
0.99069
0.94806
0.94731
0.92111
0.98745
0.96848
0.56515
0.99069
0.88098
0.91445
0.92469
0.92469
0.94500
0.96118
0.96118
0.94806
0.94806
0.94806
0.99069
0.99069
0.99069
0.91403
0.97342
0.91445
0.96118
Tabla 5.9.a. GA_ECM en el problema E2 para los
métodos de defuzzificación no paramétricos D1 a D34
I36
0.88977
0.88977
0.74560
0.00000
0.88977
0.89349
0.89349
0.88977
0.88977
0.98784
0.96629
0.98784
0.98784
0.99674
0.98868
0.59015
0.98784
0.88723
0.90729
0.91956
0.91949
0.99449
0.99574
0.99573
0.96491
0.96491
0.96491
0.98784
0.98784
0.98784
0.98135
0.99156
0.90649
0.99573
Apéndice A: Parámetros y Resultados Parciales
D35
D36
D37
D38
D39
D40
D41
D42
D43
D44
D45
D46
D47
D48
D49
D50
D51
I1
0.95700
0.96980
0.95783
0.96925
0.95347
0.89098
0.89080
0.88977
0.88977
0.88977
0.88977
0.88977
0.88977
0.89080
0.99961
0.99625
0.95925
I4
0.99617
0.99677
0.99636
0.99658
0.99630
0.99425
0.91135
0.88977
0.88977
0.88977
0.88977
0.88977
0.88977
0.91134
0.99966
0.99917
0.97325
I6
0.97270
0.98876
0.97673
0.98464
0.97494
0.89098
0.89329
0.88977
0.88977
0.88977
0.88977
0.88977
0.88977
0.89329
0.99967
0.99648
0.95994
173
I8
*
*
*
*
*
*
*
*
*
*
*
*
*
*
0.99996
*
*
I10
0.88977
0.88977
0.88977
0.88977
0.88977
0.88977
0.99528
0.99942
0.99927
0.99943
0.99910
0.99936
0.99554
0.99894
0.99966
0.98822
0.99965
I18
0.88977
0.88977
0.88977
0.88977
0.88977
0.88977
0.92008
0.96164
0.96993
0.96125
0.97099
0.95375
0.89087
0.92281
0.96118
0.90433
0.96057
I36
0.88977
0.88977
0.88977
0.88977
0.88977
0.88977
0.88367
0.98148
0.98681
0.97894
0.99153
0.97033
0.89084
0.89098
0.99573
0.98125
0.99556
Tabla 5.9.b. GA_ECM en la aplicación E2 para los
métodos de defuzzificación paramétricos D35 a D51.
El ECM máximo para toda la Tabla 5.9 es 39801143, y el mínimo, 68172.92657.
Estudio de los Métodos de Defuzzificación
174
Apéndice B: Estrategias de Evolución y Algoritmos
Genéticos
Ajuste de los Parámetros
Los métodos empleados para ajustar los parámetros se basan en la Computación
Evolutiva [Bäc96].
La Computación Evolutiva trata de la simulación de algunos aspectos de la
evolución en la naturaleza para resolver problemas mediante el ordenador. Los
Algoritmos Evolutivos son los modelos computacionales de la Computación
Evolutiva. Los cuatro tipos de Algoritmos Evolutivos son:
•
•
•
•
los Algoritmos Genéticos (AGs),
las Estrategias de Evolución (EEs),
la Programación Evolutiva, y
la Programación Genética.
Estos cuatro tipos de algoritmos tienen en común el hecho de modelar dentro de
una población los procesos de reproducción, variación aleatoria, competición y
selección de individuos rivales, de modo que la evolución ocurre al darse estos
hechos como en la naturaleza.
Para el aprendizaje de los parámetros de los seis métodos de defuzzificación
propuestos en la Sección 5.5.1, emplearemos Estrategias de Evolución y Algoritmos
Genéticos (las primeras para los dos métodos de un sólo parámetro y los segundos
para los métodos multi-paramétricos) cuyo funcionamiento va a ser descrito en las
siguientes subsecciones.
Estrategias de Evolución
Fueron propuestas por Rechenberg y Schwefel [BS95, Sch95] con el objetivo de
obtener sistemas que fueran capaces de resolver problemas complejos de
optimización con parámetros reales. Normalmente, las mutaciones se producen
sumando a cada componente a mutar un valor generado según una distribución
normal. La selección suele ser determinística, de forma que un individuo mutado
pasará a la siguiente generación sólo en el caso de que su valor de adaptación sea
superior al del individuo original. Las EEs incluyen un mecanismo de
autoadaptación de los parámetros de la estrategia de búsqueda en el proceso
Apéndice B: Estrategias de Evolución y Algoritmos Genéticos
175
evolutivo, es decir, buscan en el espacio de soluciones y en el de parámetros de la
estrategia simultáneamente.
Las EEs que emplearemos para aprender los parámetros de los dos primeros
métodos de defuzzificación propuestos son las llamadas EE-(1+1). Se basan en el
manejo de sólo dos individuos por generación, un padre y un descendiente. El
algoritmo hace evolucionar al padre aplicando un determinado operador de
mutación a cada uno de sus componentes. Si la adaptación realizada ha tenido
éxito, es decir, el hijo está mejor adaptado que el padre según el valor de ambos en
la función de adaptación, entonces el hijo sustituye al padre en la siguiente
generación. El proceso se repite hasta que se verifica una determinada condición de
parada que habitualmente consiste en que el proceso se estabilice durante un
número de generaciones determinado.
El operador de mutación mut está formado por dos componentes. El primero de
ellos, muσ, es el encargado de adaptar el valor de la desviación típica σ, mediante la
denominada regla de éxito 1/5 de Rechenberg:
σ
n ,
c
σ ' = muσ = σ ⋅ n c ,
σ,
1
5
1
si p < ,
5
1
si p =
5
si p >
donde n es la dimensión del vector solución, p es la frecuencia relativa de
mutaciones efectuadas con éxito y c es una constante que determina la cantidad en
la que se actualiza σ.
El segundo, mux, es el que lleva a cabo la mutación de los componentes del
vector de números reales sumando a cada uno de ellos un valor aleatorio zi
distribuido según una normal de media o y desviación típica σ’:
x' = mux ( x ) = ( x1 + z1 ,..., xn + zn ) ,
donde zi ≈ N ( 0 ,σ ' 2 ). .
Algoritmos Genéticos
Son algoritmos de búsqueda de propósito general que utilizan principios
inspirados por la genética natural para evolucionar soluciones a problemas [Gol89,
Hol75,Mic96]. Los AGs han sido aplicados con mucho éxito en problemas de
búsqueda y optimización. La razón de gran parte de este éxito se debe a su
habilidad para explotar la información que van acumulando sobre el espacio de
búsqueda que manejan, desconocido inicialmente, lo que les permite redirigir
176
Estudio de los Métodos de Defuzzificación
posteriormente la búsqueda hacia subespacios útiles. La capacidad de adaptación
que presentan es su característica principal, esencialmente en espacios de
búsqueda grandes, complejos y con poca información disponible.
Los AGs funcionan de la siguiente forma: el sistema parte de una población
inicial de individuos que codifican, mediante alguna representación genética, las
soluciones candidatas al problema propuesto (denominados cromosomas). Esta
población de individuos evoluciona en el tiempo mediante un proceso de
competición y variación controlada. Cada cromosoma de la población tiene asociada
una medida de adaptación o fitness para determinar qué cromosomas serán
seleccionados para formar parte de la nueva población en el proceso de competición.
La nueva población será creada usando operadores genéticos de cruce y mutación.
La Figura 5.2, en la que P(t) denota la población en la generación t, muestra la
estructura general de un AG básico.
Procedimiento Algoritmo Genético
comienzo (1)
t=0;
inicializar P(t);
evaluar P(t);
Mientras (No condición de parada) hacer
comienzo (2)
t=t+1;
seleccionar P’(t) a partir de P(t-1);
cruzar y mutar P’(t);
P(t)=P’(t);
evaluar P(t);
fin (2)
fin (1)
Figura 5.2. Estructura básica de un algoritmo genético
Para resolver un problema con un AG se deben diseñar los siguientes
componentes:
1. la representación genética de las soluciones del problema,
2. la generación de una población inicial de soluciones,
3. una función de evaluación que ofrezca un valor de adaptación para cada
cromosoma,
4. operadores genéticos que modifiquen la composición genética de la
descendencia durante la reproducción, y
5. valores para los parámetros que utilizan los Algoritmos Genéticos (tamaño
de la población, probabilidades de aplicar los operadores genéticos, etc.).
Apéndice B: Estrategias de Evolución y Algoritmos Genéticos
177
La selección de una adecuada representación es fundamental ya que puede
limitar fuertemente los resultados obtenidos. Existen varios esquemas de
codificación entre los que destacan: la codificación binaria, que es la más antigua y
se basa en utilizar cadenas de bits; la codificación real, en la que cada variable del
problema se asigna a un único gen que toma un valor real dentro del intervalo
especificado por lo que no existen diferencias entre el genotipo (la codificación
empleada) y el fenotipo (la propia solución codificada).
La función de evaluación desempeña, al igual que el esquema de codificación, un
papel determinante en el AG al guiar el proceso evolutivo dentro del espacio de
búsqueda. Esta función debe estar bien diseñada para ser capaz no sólo de
distinguir individuos bien adaptados, sino también de ordenarlos en función de su
capacidad para resolver el problema.
El mecanismo de selección determina una población intermedia de individuos a
la que se aplicarán los operadores de cruce y mutación para obtener así la nueva
población del AG en la siguiente generación. Si notamos por P la población actual
formada por n cromosomas, C1, ... , Cn, el mecanismo de selección se encarga de
obtener una población intermedia P’ formada por copias de los cromosomas de P .
El número de veces que es copiado cada cromosoma depende de su adecuación por
lo que generalmente aquellos que representan un valor mayor en la función de
adaptación suelen tener más oportunidades para contribuir con copias a la
formación de P’.
Una vez formada la población intermedia mediante el mecanismo de selección,
llega el momento de aplicar los operadores genéticos de cruce y mutación para
alterar la composición de los descendientes que formarán la nueva población.
El operador de cruce es un mecanismo para compartir información entre
cromosomas. Combina las características de dos cromosomas padre para obtener
dos descendientes, con la posibilidad de que los cromosomas hijo, obtenidos
mediante la recombinación de sus padres, estén mejor adaptados que éstos. No se
suele aplicar a todas las parejas de cromosomas de la población intermedia sino que
se lleva a cabo una selección aleatoria en función de una determinada probabilidad
de aplicación llamada probabilidad de cruce, Pc.
El operador de cruce juega también un papel fundamental en el AG ya que su
tarea es explotar el espacio de búsqueda refinando las soluciones obtenidas hasta el
momento mediante la combinación de las buenas características que presenten. Su
definición depende obviamente del tipo de codificación que se esté empleando.
El operador de mutación altera aleatoriamente uno o más genes del cromosoma
seleccionado para aumentar la diversidad de la población. Todos los genes de un
cromosoma están sujetos a la posibilidad de mutar de acuerdo con una
probabilidad de mutación, Pm.
178
Estudio de los Métodos de Defuzzificación
La propiedad de búsqueda asociada al operador de mutación es la exploración,
ya que la alteración aleatoria de una de las componentes del código genético de un
individuo suele conllevar el salto a otra zona del espacio de búsqueda que puede
resultar más prometedora.
Comentarios Finales
Resumen
Se inició esta memoria con el objetivo de realizar un estudio sobre el Sistema de
Inferencia de los SBRDs, es decir, sobre los operadores de conjunción e implicación
y los métodos de defuzzificación que se emplean en el proceso de inferencia.
En primer lugar, era necesario disponer de herramientas adecuadas para
acometer dicho estudio desde un punto de vista práctico, por lo que se construyeron
distintas implementaciones y se realizó un estudio detallado sobre las filosofías de
implementación de SBRDs [CHP99a].
El punto de partida del estudio sobre el Sistema de Inferencia consistió en
analizar la influencia del operador de conjunción, del operador de implicación y de
los métodos de defuzzificación, así como las interacciones entre la decisión sobre
estos elementos y la precisión del sistema obtenido finalmente [CHP95, CHP97a].
Los resultados del estudio preliminar mostraron una primera conclusión
relevante: la elección de la t-norma que realiza al papel de operador de conjunción
es poco importante.
Los operadores de implicación basados en la extensión de la conjunción booleana
mostraron, en líneas generales, mejores resultados que aquellos que extienden la
implicación booleana y que aquellos otros que no pertenecen a ninguna de estas dos
grandes familias. Al buen comportamiento medio mostrado por un operador de
implicación en diferentes aplicaciones y con diferentes métodos de defuzzificación
se le llamó robustez. Así pues, se dice que los operadores de implicación de la
familia las t-normas son operadores robustos.
En lo relativo a los métodos de defuzzificación, los métodos que trabajan en
Modo B – FITA obtenían claramente mejores resultados. El grado de
emparejamiento se ha mostrado como el grado de importancia que mejores
resultados consigue, mientras que el valor característico Punto de Máximo Valor es
la información más general del conjunto difuso a defuzzificar.
180
Comentarios Finales
El comportamiento robusto de los operadores de implicación de la familia de las
t-normas como representantes considerados de la familia de los que extienden la
conjunción booleana suscitó las siguientes interrogantes:
• ¿Es condición suficiente que un operador sea extensión de la conjunción booleana
para que sea un buen operador de implicación?.
• ¿Sería necesario verificar alguna propiedad adicional?
• ¿Sería posible obtener un conjunto de propiedades básicas para que un operador
de implicación sea robusto?
El estudio se pormenorizó entonces en los operadores de implicación. Dado el
buen comportamiento de los operadores que extendían la conjunción booleana, se
incorporó al análisis una nueva familia de operadores de este tipo, los operadores
force- implication. El resultado de este estudio de las familias de operadores de
implicación concluyó con el enunciado de tres propiedades básicas para que un
operador de implicación sea considerado robusto, es decir, que pueda ser empleado
con buen comportamiento con un amplio grupo de métodos de defuzzificación y en
cualquier aplicación de ingeniería [CHP97b, CHP00].
Las tres propiedades básicas constituían un resultado importante pero quedaba
por investigar una particularidad observada durante la experimentación: los
operadores robustos, es decir, los que cumplían las tres propiedades básicas, no
eran los únicos que podían formar parte de un buen SBRD ya que determinadas
combinaciones de operadores no robustos y métodos de defuzzificación mostraban
también buenos resultados. Esto llevó a pensar que debía haber algo más en esos
métodos de defuzzificación concretos para que los defectos de algunos operadores de
implicación quedasen subsanados con ellos. Por tanto, el paso siguiente consistió en
investigar dichos métodos.
Un estudio de las características de los métodos de defuzzificación reveló que,
efectivamente, determinadas características podían subsanar el hecho de que el
operador de implicación no cumpliese alguna o algunas de las propiedades básicas.
Los resultados fueron tres [CHP99b, CHP99c]. En primer lugar, la obtención de
una tabla que indica, en función de las propiedades básicas que cumplen los
operadores, qué métodos de defuzzificación son adecuados, lo cual constituye una
receta para conseguir buenos SBRDs incluso con nuevos operadores de implicación
que no aparezcan en los estudios llevados a cabo en esta memoria. En segundo
lugar, una serie de resultados relevantes que muestran los métodos de
defuzzificación más adecuados para cada una de las ampliamente conocidas
familias de operadores de implicación, de modo que simplemente disponiendo de la
información de a qué familia pertenece, se puede recomendar el uso de un tipo de
métodos de defuzzificación. Finalmente, el tercer resultado consistió en extraer una
serie de características comunes a los métodos de defuzzificación más genéricos, es
Comentarios Finales
181
decir, más adecuados en la mayoría de las situaciones, lo cual era algo que ya se
apreciaba desde los primeros estudios.
El último paso que se ha realizado en esta memoria ha consistido en estudiar el
amplio abanico de métodos de defuzzificación de la literatura especializada. Este
estudio reveló que prácticamente los métodos de defuzzificación que mejores
resultados habían mostrado con anterioridad no eran mejorados por los más
recientes. La literatura especializada mantiene una permanente aportación de
nuevos métodos en varias líneas pero en ningún caso se había trabajado en el
sentido de compatibilizar las características del operador de implicación con las del
método de defuzzificación. Así pues, contando con el perfil de cómo debe ser un
buen método de defuzzificación definido en el sentido de uso genérico, capaz de
permitir que el operador de implicación no verifique alguna o algunas propiedades
básicas, se ha realizado una propuesta propia que consiste en un conjunto de seis
métodos de defuzzificación paramétricos con sus correspondientes sugerencias de
Algoritmos Evolutivos para el aprendizaje de sus parámetros. Estos nuevos
métodos han sido probados en SBRDs para modelado y se ha comprobado que es
posible mejorar los mejores métodos de defuzzificación con los que se contaba hasta
el momento.
En definitiva, esta memoria muestra un proceso lineal de evolución que ha
llevado a unos resultados finales relevantes de cara al diseño de SBRDs partiendo
de la vasta propuesta teórica de operadores disponibles en este campo.
Trabajos Futuros
Siguiendo con la línea de trabajo de esta memoria, el paso inmediato consiste en
aplicar los métodos de Computación Evolutiva no sólo a la propuesta de métodos de
defuzzificación propia que se presenta sino también a los métodos paramétricos
propuestos por otros autores. De ese modo, se podrá conocer cuáles son realmente
más adaptables y ofrecen los mejores resultados tras un proceso de aprendizaje de
sus parámetros.
Queda también abierto como trabajo futuro el siguiente paso lógico que consiste
en la introducción de parámetros en el resto de los operadores del SBRD de modo
que pueda adaptarse no sólo el Interfaz de Defuzzificación sino todo el SBRD. De
hecho, ya existen algunas aportaciones en este campo [ETG99, JS99]. El proceso de
ajuste de parámetros podría incluir también simultáneamente a la propia BC, lo
cual podría arrojar nuevas cotas en cuanto a precisión.
Una tercera vía de trabajo consistiría en incorporar un mecanismo de reducción
dinámica del número de reglas que se consideran en el proceso de inferencia en
base a criterios de calidad de modo similar a como se ha realizado en Sistemas de
Clasificación Basados en Reglas Difusas [CJH98]. De este modo, algunos SBRDs
182
Comentarios Finales
construidos con determinadas combinaciones de operadores de implicación y
métodos de defuzzificación que inicialmente no presentaran buen comportamiento
al no corresponder al perfil más adecuado, podrían con toda probabilidad, mejorar
sus resultados.
Apéndice I: Operadores de Implicación y Métodos
de Defuzzificación
Operadores de Implicación
Funciones de Implicación:
S-Implicaciones:
Diene:
I1 (x,y) = Max (1-x, y)
Figura AI.1.
Dubois-Prade:
1 - x, si y = 0
I2(x, y) = y,
si x = 1
1, en otro caso
Figura AI.2.
Mizumoto:
I3 (x,y) = 1-x + x· y
184
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
Figura AI.3.
R-Implicaciones:
Gödel:
1, si x ≤ y
I 4 (x, y) =
y, en otro caso
Figura AI.4.
Goguen:
y
I5(x, y) = Min(1, x ),
1,
si x ≠ 0
en otro caso
Figura AI.5.
S y R-Implicaciones
Lukasiewicz:
I6 (x,y) = Min (1, 1-x+y)
Operadores de Implicación
185
Figura AI.6.
Otros operadores de Implicación que Extienden la Implicación Booleana:
Implicación de la Mecánica Quántica (Q-M Implicacion) de Early-Zadeh:
Se corresponden con la definición de implicación de la lógica cuántica:
A → B = ¬A ∨ (A ∧ B)
tomando la forma
I (x,y) = S (N(x) , T(x,y))
donde S es una t-conorma, N una función de negación, y T una t-norma.
I7 (x,y) = Max (1-x, Min (x, y))
cuando h ≥ ½:
Figura AI.7.a.
cuando h ≤ ½:
186
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
Figura AI.7.b.
Gaines:
si x ≤ y
1,
I8 ( x , y ) =
0, en otro caso
Figura AI.8.
Operador de Implicación I9:
1, si x = y
I9(x, y) =
y, en otro caso
Figura AI.9.
Operadores de Implicación T-normas:
Producto Lógico (mínimo):
I10 (x,y) = Min (x, y)
Operadores de Implicación
187
Figura AI.10.
Producto de Hamacher:
I 11 ( x , y ) =
x⋅y
x+ y-x⋅y
Figura AI.11.
Producto Algebraico:
I12 (x,y) = x· y
Figura AI.12.
Producto de Einstein:
I 13 ( x , y ) =
x⋅y
3
1 + (1 - x) ⋅ (1 - y)
188
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
Figura AI.13.
Producto Acotado:
I14 (x,y) = Max (0, x+y-1)
Figura AI.14.
Producto Drástico:
x, si y = 1
I 15 ( x , y ) = y, si x = 1
0, en otro caso
Figura AI.15.
Operadores Force implications [DV95]:
A) Force implications basadas en operadores de indistinguibilidad:
Operador de Implicación I16:
Operadores de Implicación
189
1,
Min( x , y ),
I16 (x,y) = Min (x,EGödel (x,y)) donde EGödel =
si x = y
en otro caso
Figura AI.16.
Operador de Implicación I17:
I17 (x,y) = Min (x,EGoguen (x,y)) donde EGoguen (x, y) = Min (1,
Min (x, y)
)
Max (y, x)
Figura AI.17.
Operador de Implicación I18:
I18 (x,y) = Min (x,ELukasiewicz (x,y)) donde ELukasiewicz (x,y) = 1-|x-y|,
generado desde la R-Implicación IL (x,y) = f -1 (f(y) - f(x)), siendo F una t-norma
arquimediana generada por f = 1 - x [TV85].
cuando h ≥ ½:
Figura AI.18.a.
cuando h ≤ ½:
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
190
Figura AI.18.b.
Operador de Implicación I19:
I19 (x,y) = Min (x,EMizumoto (x,y)) donde EMizumoto (x,y) = 1-x-y + 2· x· y
cuando h ≥ ½:
Figura 2.19.a.
cuando h ≤ ½:
Figura AI.19.b.
Operador de Implicación I20:
I20 (x,y) = Min (x,EDiene (x,y)) donde EDiene (x,y) = F (Max (1-x,y), Max (1-y,x)),
siendo F una t-norma nilpotente. En esta memoriase trabaja con el producto
acotado, y por tanto EDiene = Max {0, Max (1-x,y) + Max (1-y,x)-1}
cuando h ≥ ½:
Operadores de Implicación
191
Figura AI.20.a.
cuando h ≤ ½:
Figura AI.20.b.
Operador de Implicación I21:
I21 (x,y) = x ⋅ EGödel (x,y)
Figura AI.21.
Operador de Implicación I22:
I22 (x,y) = x ⋅ EGoguen (x,y)
Figura AI.22.
192
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
Operador de Implicación I23:
I23 (x,y) = x ⋅ ELukasiewicz (x,y)
Figura AI.23.
Operador de Implicación I24:
I24 (x,y) = x ⋅ EMizumoto (x,y)
Figura AI.24.
Operador de Implicación I25:
I25 (x,y) = x ⋅ EDiene (x,y)
cuando h ≥ ½:
Figura AI.25.a.
cuando h ≤ ½:
Operadores de Implicación
193
Figura AI.25.b.
Operador de Implicación I26:
I26 (x,y) = Max (x + EGödel (x,y) - 1, 0)
cuando h ≥ ½:
Figura AI.26.a.
cuando h ≤ ½:
Figura AI.26.b.
Operador de Implicación I27:
I27 (x,y) = Max (x + EGoguen (x,y) - 1, 0)
cuando h ≥ ½:
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
194
Figura AI.27.a.
cuando h ≤ ½:
Figura AI.27.b.
Operador de Implicación I28:
I28 (x,y) = Max (x + ELukasiewicz (x,y) - 1, 0)
cuando h ≥ ½:
Figura AI.28.a.
cuando h ≤ ½:
Figura AI.28.b.
Operadores de Implicación
195
Operador de Implicación I29:
I29 (x,y) = Max (x + EMizumoto (x,y) - 1, 0)
cuando h ≥ ½:
Figura AI.29.a.
cuando h ≤ ½:
Figura AI.29.b.
Operador de Implicación I30:
I30 (x,y) = Max (x + EDiene (x,y) - 1, 0)
cuando h ≥ ½:
Figura AI.30.a.
cuando h ≤ ½, I (x,y) = 0 :
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
196
Figura AI.30.b.
B) Force implications basadas en distancias:
Operador de Implicación I31:
I31 (x,y) = Min (x, 1 - |x-y| )
cuando h ≥ ½:
Figura AI.31.a.
cuando h ≤ ½:
Figura AI.31.b.
Operador de Implicación I32:
I32 (x,y) = x ⋅ (1- |x-y| )
Operadores de Implicación
197
Figura AI.32.
Operador de Implicación I33:
I33 (x,y) = Max (x - |x-y|, 0)
cuando h ≥ ½:
Figura AI.33.a.
cuando h ≤ ½:
Figura AI.33.b.
Operador de Implicación I34:
I34 (x,y) = Min (x, 1-|x-y|2)
cuando h ≥
−1+ 5
:
2
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
198
Figura AI.34.a.
cuando h ≤
−1+ 5
:
2
Figura AI.34.b.
Operador de Implicación I35:
I35 (x,y) = x ⋅ (1- |x-y|2 )
Figura AI.35.
Operador de Implicación I36:
I36 (x,y) = Max (x - |x-y|2, 0)
cuando h ≥
3− 5
:
2
Operadores de Implicación
199
Figura AI.36.a.
cuando h ≤
3− 5
:
2
Figura AI.36.b.
Otro operador de implicación
Operador de Implicación I37:
I37 (x,y) = Min (I’ (x,y), I’ (1-x,1-y))
si x ≤ y
1,
y, en otro caso
donde I 4 (x, y) =
cuando h ≥ ½:
Figura AI.37.a.
cuando h ≤ ½:
200
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
Figura AI.37.b.
Métodos de Defuzzificación
201
Métodos de Defuzzificación
Modo A – FATI No Paramétricos:
El conjunto difuso B’ se obtiene como resultado de la agregación de los conjuntos
difusos individuales B’i con un conectivo también. Dicho conectivo es habitualmente
el mínimo (Razonamiento Aproximado de Mamdani) o el máximo (Razonamiento
Lógico Formal).
Mínimo como conectivo también (MAR):
•
D1: Media de los Máximos (MOM) de B’ obtenido mediante agregación con el
mínimo.
•
D2: Centro de Gravedad (CG) de B’ obtenido mediante agregación con el
mínimo.
•
D3: El Máximo más a la izquierda (FOM) de B’ obtenido mediante
agregación con el mínimo.
•
D4: El Máximo más a la derecha (LOM) de B’ obtenido mediante agregación
con el mínimo.
•
D5: La Media de los Alfacortes Esperados (EAM) de B’ obtenido mediante
agregación con el mínimo.
•
D6: Media de la Función de Pertenencia (DOM) de B’ obtenido mediante
agregación con el mínimo.
•
D7: Media de la Gravedad (DOG) de B’ obtenido mediante agregación con el
mínimo.
•
D8: Centro de Máximos (COM) de B’ obtenido mediante agregación con el
mínimo.
•
D9: Centro de la zona de Mayor Área (CLA) de B’ obtenido mediante
agregación con el mínimo.
Máximo como conectivo también (FLR):
•
D10: Media de los Máximos (MOM) de B’ obtenido mediante agregación con
el máximo.
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
202
•
D11: Centro de Gravedad (CG) de B’ obtenido mediante agregación con el
máximo.
•
D12: El Máximo más a la izquierda (FOM) de B’ obtenido mediante
agregación con el máximo.
•
D13: El Máximo más a la derecha (LOM) de B’ obtenido mediante agregación
con el máximo.
•
D14: La Media de los Alfacortes Esperados (EAM) de B’ obtenido mediante
agregación con el máximo.
•
D15: Media de la Función de Pertenencia (DOM) de B’ obtenido mediante
agregación con el máximo.
•
D16: Media de la Gravedad (DOG) de B’ obtenido mediante agregación con el
máximo.
•
D17: Centro de Máximos (COM) de B’ obtenido mediante agregación con el
máximo.
•
D18: Centro de la zona de Mayor Área (CLA) de B’ obtenido mediante
agregación con el máximo.
Modo B – FITA No Paramétricos:
Sumas ponderadas por grados de importancia [Tsu79, HT93, CCCHP94]:
•
D19: Centro de Gravedad ponderado por el área si:
y0 =
∑ si ⋅ W i
i
∑ si
i
•
D20: Centro de Gravedad ponderado por la altura li:
∑ li ⋅ Wi
y0 = i
∑ li
i
•
D21: Centro de Gravedad ponderado por el grado de emparejamiento hi:
Métodos de Defuzzificación
203
∑ hi ⋅ Wi
y0 = i
∑ hi
i
•
D22: Punto de Máximo Valor ponderado por el área:
∑ si ⋅ G i
y0 = i
∑ si
i
•
D23: Punto de Máximo Valor ponderado por la altura:
y0 =
∑ li ⋅ Gi
i
∑ li
i
•
D24: Punto de Máximo Valor ponderado por el grado de emparejamiento:
∑ hi ⋅ Gi
y0 = i
∑ hi
i
Basados en el conjunto difuso de mayor grado de importancia:
•
D25: Centro de Gravedad del conjunto difuso con mayor área [HDR93, HT93,
Hel93, PYL92, RG93a, CCCHP94]:
B’k = { B’i si = Max (st), ∀ t ∈ {1,...,m} }
y0 = Wk
•
D26: Centro de Gravedad del conjunto difuso con mayor altura [CCCHP94]:
B’k = { B’i li = Max (lt), ∀ t ∈ {1,...,m} }
y0 = Wk
•
D27: Centro de Gravedad del conjunto difuso de mayor grado de
emparejamiento [CCCHP94]:
B’k = { B’i hi = Max (ht), ∀ t ∈ {1,...,m} }
y0 = Wk
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
204
•
D28: Punto de Máximo Valor del conjunto difuso con mayor área [CCCHP94]:
B’k = { B’i si = Max (st), ∀ t ∈ {1,...,m} }
y0 = Gk
•
D29: Punto de Máximo Valor del conjunto difuso de mayor altura
[CCCHP94]:
B’k = { B’i li = Max (lt), ∀ t ∈ {1,...,m} }
y0 = Gk
•
D30: Punto de Máximo Valor del conjunto difuso de mayor grado de
emparejamiento [CCCHP94]:
B’k = { B’i hi = Max (ht), ∀ t ∈ {1,...,m} }
y0 = Gk
Otros:
•
D31: Media de los Máximos Valores:
y0 =
∑ Gi
i
m
donde m es el número de conjuntos difusos no nulos obtenidos en el proceso
de inferencia.
•
D32: Media del Mayor y Menor Valor:
Gmin = Min Gi , ∀ i ∈ {1,...,m}
Gmax = Max Gi , ∀ i ∈ {1,...,m}
y0 =
•
Gmin + Gmax
2
D33: Centro de Sumas [HDR93,HT93,Hel93]:
y0 =
∑ ∫Y y ⋅ µB' i( y ) dy
i
∑ ∫Y µB' i( y ) dy
i
Métodos de Defuzzificación
•
205
D34: Método de Calidad (QM)[HT93]:
n
u=
∑ si
i =1
middle
⋅ wi
n
∑ wi
i =1
Modo A – FATI Paramétricos:
Mínimo como conectivo también (MAR):
• D35: Estrategia de Defuzzificación basada en Transformación de Distribución
Gausiana (GTD) de B’ obtenido mediante agregación con el mínimo.
• D36: Estrategia de Defuzzificación basada en Transformación Polinomial
(PTD) de B’ obtenido mediante agregación con el mínimo.
• D37: Estrategia de Defuzzificación Multimodo basada en Transformación
Polinomial (M-PTD) de B’ obtenido mediante agregación con el mínimo.
• D38: BADD de B’ obtenido mediante agregación con el mínimo.
• D39: SLIDE de B’ obtenido mediante agregación con el mínimo.
• D40: Método de los Valores más Típicos (MTV) de B’ obtenido mediante
agregación con el mínimo.
• D41: Defuzzificación de Área Variable (VAD) de B’ obtenido mediante
agregación con el mínimo.
Máximo como conectivo también (FLR):
• D42: Estrategia de Defuzzificación basada en Transformación de Distribución
Gausiana (GTD) de B’ obtenido mediante agregación con el máximo.
• D43: Estrategia de Defuzzificación basada en Transformación Polinomial
(PTD) de B’ obtenido mediante agregación con el máximo.
• D44: Estrategia de Defuzzificación Multimodo basada en Transformación
Polinomial (M-PTD) de B’ obtenido mediante agregación con el máximo.
• D45: BADD de B’ obtenido mediante agregación con el máximo.
• D46: SLIDE de B’ obtenido mediante agregación con el máximo.
Apéndice I: Operadores de Implicación y Métodos de Defuzzificación
206
• D47: Método de los Valores más Típicos (MTV) de B’ obtenido mediante
agregación con el máximo.
• D48: Defuzzificación de Área Variable (VAD) de B’ obtenido mediante
agregación con el máximo.
Modo B – FITA Paramétricos:
•
D49: Método de Calidad (QM) Paramétrico.
Modo Mixto A-B (FATI-FITA) Paramétrico:
Mínimo como conectivo también (MAR):
•
D50: COG / QM de B’ obtenido mediante agregación con el mínimo.
Máximo como conectivo también (FLR):
•
D51: COG / QM de B’ obtenido mediante agregación con el máximo.
Apéndice II: Aplicaciones
Relación Funcional Simple Y=X
Está basada en los estudios realizados en [CPK92], en los cuales se muestra que
la independencia entre la aplicación considerada y la exactitud obtenida por el
SBRD es una cuestión muy importante en la comparación de la influencia de los
operadores utilizados para diseñarlo. Para evitar la posible dependencia de los
resultados obtenidos de la especificidad de la aplicación escogida, se ha considerado
la relación funcional muy sencilla Y=X en el intervalo [0,10]. Esta elección se
justifica también desde el punto de vista que el mal comportamiento de los SBRDs
con determinados operadores, sería más acusado si la aplicación era simple.
Se han considerado cinco etiquetas lingüísticas {MP, P, M, G, MG} para realizar
la partición difusa del dominio de las variables X e Y, donde
MP es muy pequeño,
P es pequeño,
M es medio,
G es grande,
MG es muy grande.
Sus correspondientes funciones de pertenencia, presentadas en [CPK92], son las
mostradas en la Figura AII.1.
Figura AII.1. Partición difusa considerada
para el modelado de la función Y=X
Las reglas de difusas contenidas en la base de reglas son:
Si X es MP entonces Y es MP
Si X es P entonces Y es P
Si X es M entonces Y es M
Apéndice II: Aplicaciones
208
Si X es G entonces Y es G
Si X es MG entonces Y es MG
En esta aplicación, el conjunto de datos para la evaluación utilizados para medir
la precisión de los SBRDs, está compuesto por 41 pares de datos tomados con una
frecuencia de 0.25 en el intervalo [0,10].
Modelado Difuso de las Superficies Tridimensionales F1 y
F2
El modelado difuso de estas funciones fue propuesto en [CH97]. Las expresiones
matemáticas de las superficies son las siguientes:
F1 ( x1 , x2 ) = x12 + x 22 ,
donde x1 , x2 ∈ [− 5 ,5 ], F1 ( x1 , x 2 ) ∈ [0 ,50 ] , y
F2 ( x1 , x2 ) = 10 ⋅
x1 + x1 ⋅ x2
,
x1 - 2 ⋅ x1 ⋅ x2 + x 2
donde x1 , x2 ∈ [0 ,1], F2 ( x1 , x2 ) ∈ [0 ,10 ] .
Las Figuras AII.2 y AII.3 muestran las representaciones gráficas de F1 y F2
respectivamente. Como se observa, las dos funciones son sencillas y unimodales. La
segunda de ellas se caracteriza por no estar definida en los puntos (0,0) y (1,1).
Figura AII.2. Representación
gráfica de la superficie F1
Figura AII.3. Representación
gráfica de la superficie F2
El dominio de las variables de entrada de F1 ha sido particionado utilizando
siete etiquetas lingüísticas {NG, NM, NP, CR, PP, PM, PG} donde:
NG es negativo,
Apéndice II: Aplicaciones
209
NM es negativo medio,
NP es negativo pequeño,
CR es cero,
PP es positivo pequeño,
PM es positivo medio,
PG es positivo grande.
Por otro lado, los dominios de la variable de salida de F1 y de las de entrada y
salida de F2 se han particionado empleando 7 etiquetas {EP, MP, P, M, G, MG, EG}
donde:
EP es extremadamente pequeño,
MP es muy pequeño,
P es pequeño,
M es medio,
G es grande,
MG es muy grande,
EG es extremadamente grande.
La Figura AII.4. muestra las funciones de pertenencia asociadas para ambos
casos:
Figura AII.4. Partición difusa de las variables de F1 y F2
Los experimentos desarrollados con las funciones F1 y F2, han sido realizados
empleando dos bases de conocimiento de 49 reglas de tipo Mamdani generadas
desde un conjunto de datos de entrenamiento mediante el método de Wang y
Mendel (WM) [WM92] (en el Apéndice III de la presente memoria se describe dicho
método). Estas bases de conocimiento son mostradas en las Tablas AII.1. y AII.2.
Los conjuntos de entrenamiento empleados para el aprendizaje de la BC han
sido obtenidos, generando los valores de las variables de entrada de modo uniforme
en el dominio de las variables y calculando el valor de la variable de salida
mediante el uso de la propia expresión de la función. En el caso de F1, dicho
conjunto presenta 1681 ejemplos, mientras que en el caso de F2 está compuesto por
674.
Apéndice II: Aplicaciones
210
x1
NG
NM
NP
NG
EG
G
M
NM
G
M
P
NP
M
P
MP
x2
CR
M
MP
EP
PP
M
P
MP
PM
G
M
P
PG
EG
G
M
CR
PP
PM
PG
M
M
G
EG
MP
P
M
G
EP
MP
P
M
EP
EP
MP
M
EP
MP
P
M
MP
P
M
G
M
M
G
EG
Tabla AII.1. Reglas de la aplicación F1
x1
EP
MP
P
EP
EP
EG
EG
MP
EP
M
G
P
EP
P
M
x2
M
EP
MP
P
M
G
MG
EG
EG
EG
EG
EG
MG
MG
EG
EG
G
MG
MG
EG
M
G
MG
EG
G
EP
MP
MP
MP
EP
EP
MP
EG
EP
EP
EP
P
M
G
EG
MP
P
M
EG
EP
EP
EP
EP
Tabla AII.2. Reglas de la aplicación F2
La precisión de los SBRDs construidos en los distintos capítulos se ha medido
utilizando dos conjuntos de test constituidos con 168 y 67 datos respectivamente,
(un 10% del tamaño del conjunto de entrenamiento correspondiente) obtenidos
generando el valor de las variables de estado aleatoriamente y calculando su valor
asociado para la variable de salida mediante la expresión de la función.
Problemas de Distribución en el Sistema Eléctrico
En [CHS99] se planteó la resolución de dos problemas prácticos reales mediante
distintas técnicas, entre ellas, el modelado difuso. Estos problemas eran:
•
E1: el del cálculo de la longitud real de la línea de baja tensión en núcleos
rurales,
•
y E2 o problema de los costes óptimos teóricos de la línea de media tensión en
núcleos urbanos.
Para el problema E1 se dispuso de un conjunto de datos tomados en 495 pueblos
con dos variables de entrada y una de salida. Las entradas consisten en:
•
x1, el número de abonados, que toma valor en el intervalo [1,320], y
•
x2, el radio de la población, que toma valor en el intervalo [60,1673].
Apéndice II: Aplicaciones
211
La variable de salida, y, es la longitud del cable de baja tensión tendido en dicha
población que toma valores en el intervalo [80,7675].
El dominio de las variables de entrada y salida ha sido particionado en siete
etiquetas { EP, MP, P, M, G, MG, EG }. La Figura AII.5 muestra esta partición.
Figura AII.5. Partición difusa considerada para
las variables de entrada y salida de E1
Cada una de las siete etiquetas tiene el siguiente significado:
EP es extremadamente pequeño,
MP es muy pequeño,
P es pequeño,
M es medio,
G es grande,
MG es muy grande,
EG es extremadamente grande.
La base de reglas de 24 reglas (mostradas en la Tabla AII.3) de tipo Mamdani ha
sido generada desde un conjunto de datos de entrenamiento compuesto por el 80%
de los datos disponibles, es decir, 396 de los 495 pueblos, tomados de modo
aleatorio. Para ello, se ha empleado de nuevo el método WM [WM92] descrito en el
Apéndice III de la presente memoria.
x1
EP
MP
P
M
G
MG
EG
EP
EP
EP
MP
MP
MP
MP
MP
P
MP
MP
M
P
M
x2
M
P
G
P
MG
G
P
P
EG
MG
MP
G
G
M
EG
M
P
Tabla AII.3. Reglas del problema E1
Apéndice II: Aplicaciones
212
La evaluación de los SBRDs diseñados en los distintos capítulos de la memoria
se ha llevado a cabo con el 20% restante de los datos del conjunto inicial, es decir,
los 99 pueblos restantes.
Para el segundo de los problemas, E2, se dispuso de un conjunto de datos de 1059
ciudades que constan de cuatro variables de entrada y una de salida. Las entradas
consisten en:
•
x1, el ratio resultante de efectuar el producto del número de manzanas
existentes en la población por la longitud media de una manzana, que toma
valores en el intervalo [0.5,11].
•
x2, el área total del casco urbano de la población, el cual toma valores en
[0.15,8.55].
•
x3, el área construida en dicho casco urbano, que toma valores en
[1.64,142.5].
•
x4, la potencia consumida por la población, situada en [1,165].
La variable de salida, y, consiste en el coste de la línea eléctrica de media
tensión instalada en la población y toma valores en el intervalo [0, 8546.030273].
El dominio de las variables de entrada y salida ha sido particionado en cinco
etiquetas { MP, P, M, G, MG }. La Figura AII.6 muestra esta partición.
Figura AII.6. Partición difusa considerada para
las variables de entrada y salida de E2
Cada una de las cinco etiquetas tiene el siguiente significado:
MP es muy pequeño,
P es pequeño,
M es medio,
G es grande,
MG es muy grande.
Apéndice II: Aplicaciones
213
La base de reglas de 66 reglas de tipo Mamdani ha sido generada a partir de un
conjunto de datos de entrenamiento del 80% de los datos disponibles, es decir, 847
de los 1059 pueblos, tomados de modo aleatorio, mediante el método de WM. La
evaluación de los SBRDs diseñados en la memoria se ha llevado a cabo con el 20%
restante del conjunto de datos inicial, es decir, los 212 pueblos restantes.
214
Apéndice II: Aplicaciones
Apéndice III: Algoritmo de Aprendizaje de Bases
de Reglas de Wang y Mendel
En éste apéndice se introduce brevemente el funcionamiento del algoritmo de
generación de reglas difusas presentado por Wang y Mendel en [WM92]. Dicho
proceso se basa en la existencia de un conjunto de datos de entrada-salida que
reflejen el comportamiento del problema a resolver y de una definición previa de la
base de datos formada por las particiones difusas de los espacios de entrada y
salida del problema en cuestión. La estructura de la regla que maneja es la
habitual de los SBRDs de tipo Mamdani con la forma
Si X1 es A1 y ... y Xn es An entonces Y es B,
donde Xi e Y son variables lingüísticas de entrada y salida respectivamente, y los Ai
y B son etiquetas lingüísticas asociadas con conjuntos difusos que determinan su
semántica.
De este modo, las bases de reglas generadas a partir del proceso de Wang y
Mendel presentan un número de reglas acotado superiormente por el producto del
número de términos lingüísticos asociados a las variables de entrada del sistema.
La generación de la base de reglas se efectúa mediante la aplicación de los tres
pasos siguientes:
1. Generar un conjunto preliminar de reglas lingüísticas: Este conjunto estará
formado por la regla que mejor cubra a cada ejemplo contenido en el
conjunto de datos de entrada-salida. La composición de estas reglas se
obtiene tomando un ejemplo concreto, es decir, un vector de valores reales
con dimensión n+1 (n valores de entrada y uno de salida) y asignando a cada
variable lingüística la etiqueta existente con el conjunto de términos de la
misma que tenga asociado el conjunto difuso con el que el componente del
vector tenga un mayor grado de pertenencia.
2. Asignar un grado de importancia a cada regla: Sea la regla R= Si X1 es A y
... y X2 es B entonces Y es C generada a partir del ejemplo (x1, x2, y), el grado
asociado a la misma se obtiene de la forma:
G(R)=µA(x1)⋅ µB(x2) ⋅ µC(y).
3. Construir una base de reglas final a partir de las reglas anteriores: En el
caso en que todas las reglas existentes en el conjunto preliminar que
216
El Proceso Inductivo de Generación de Bases de Reglas de Wang y Mendel
presenten la misma combinación de antecedentes tengan asociado el mismo
consecuente, dicha regla es automáticamente insertada (una sola vez) en la
base de reglas final. En cambio, en el caso en que existan reglas conflictivas,
es decir, reglas con el mismo antecedente y distintos valores en el
consecuente, la regla insertada será aquella que presente mayor grado de
importancia.
Bibliografía
[Bäc96]
Bäck T. (1996) Evolutionary Algorithms in Theory and Practice.
Oxford University Press.
[Bas94]
Bastian A. (Febrero 1994) How to handle the flexibility of a
linguistic variables with applications. International Journal of
Uncertainty, Fuzzyness and Knowledge-Based Systems 3 (4): 463484.
[Bas95]
Bastian A. (1995) Handling the nonlinearity of a fuzzy logic
controller at the transition between rules. Fuzzy Sets and Systems,
71: 369-387.
[BD95]
Bardossy A. y Duckstein L. (1995) Fuzzy rule-based modeling with
application to geophisical, biological and engineering system. CRC
Press.
[Ber93]
Berenji H. (1993) Fuzzy Logic Controllers, An Introduction to Fuzzy
Logic Applications in Intelligent Systems, en R. R. Yager y L. A.
Zadeh, eds. Kluwer Academic: 69-96.
[BS95]
Bäck T. y Schwefel H.P. (1995) Evolution strategies I: variants and
their computational implementation. Periaux J., Winter G., Galán
M., y Cuesta P. (Eds) Genetic Algorithms in Engineering and
Computer Science: 111-126. John Wiley and Sons.
[CCCHP94]
Cárdenas E., Castillo J.C., Cordón O., Herrera F. y Peregrín A.
(1994) Influence of Fuzzy Implication Functions and Defuzzification
Methods in Fuzzy Control. Busefal 57: 69-79.
218
Bibliografía
[CH97]
Cordón O. y Herrera F. (Diciembre 1997) A three-stage evolutionary
process for learning descriptive and approximative fuzzy logic
controller knowledge bases from examples. International Journal of
Approximate Reasoning (17) 4.
[CHP95]
Cordón O., Herrera F. y Peregrín A. (1995) T-norms vs. implication
functions as implication operators in fuzzy control. Proceedings of
the 6th IFSA Congr. Vol. I: 501-504.
[CHP97a]
Cordón O., Herrera F. y Peregrín A. (Febrero 1997) Applicability of
the fuzzy operators in the design of fuzzy logic controllers. Fuzzy
Sets and Systems 86: 15-41.
[CHP97b]
Cordón O., Herrera F. y Peregrín A. (1997) A study on the use of
implication operators extending the boolean conjunction in fuzzy
control. Proceedings of the 7th IFSA Congr. Vol.III: 243-248.
[CHP99a]
Cordón O., Herrera F. y Peregrín A. (1999) A practical study on the
implementation of fuzzy logic controllers. International Journal of
Intelligent Control and Systems 3: 49-91.
[CHP99b]
Cordón O., Herrera F. y Peregrín A. (1999) Characterization of
implication operators in fuzzy rule based systems from basic
properties. Proceedings of the EUSFLAT-ESTYLF Joint Conference:
163-166.
[CHP99c]
Cordón O., Herrera F. y Peregrín A. (1999) Characterization of
implication operators in fuzzy control based on basic properties and
defuzzification methods. Technical Report DECSAI-99108,
Universidad de Granada, Departamento de Ciencias de la
Computación e Inteligencia Artificial. E.T.S.I. Informática.
Granada. España. Sometido a Fuzzy Sets and Systems.
[CHP00]
Cordón O., Herrera F. y Peregrín A. (2000) Searching for basic
properties obtaining robust implication operators in fuzzy control.
Fuzzy Sets and Systems 111: 237-251.
[CHS99]
Cordón O., Herrera F. y Sánchez L. (1999) Solving electrical
distribution problems using hybrid evolutionary data analysis
techniques. Applied Intelligence 10: 5-24.
[CJH98]
Cordón O., del Jesus M.J. y Herrera F. (1998) Analyzing the
Reasoning Mechanisms in Fuzzy Rule Based Classification
Systems. Mathware & Soft Computing 5: 321-332.
Bibliografía
219
[CK89]
Cao Z. Kandel A. (1989) Applicability of some implication operators.
Fuzzy Sets and Systems 31: 151-186.
[CPK92]
Cao Z., Park D. y Kandel A. (1992) Investigations on the
applicability of fuzzy inference. Fuzzy Sets and Systems 49: 151-169.
[DHR93]
Driankov D., Hellendoorn H., y Reinfrank
introduction to fuzzy control. Springer-Verlag.
[DP96]
Dubois D. y Prade H. (1996) What are fuzzy rules and how to use
them. Fuzzy Sets and Systems 84: 169-185.
[DV95]
Dujet Ch. y Vincent N. (1995) Force Implication: A new approach to
human reasoning. Fuzzy Sets and Systems 69: 53-63.
[ETG98]
Emami M.R., Türksen J.B. y Goldenberg A.A. (1998) Development
of A Systematic Methodology of Fuzzy Logic Modelling. IEEE
Transactions on Fuzzy Systems 6: 346-361.
[ETG99]
Emami M.R., Türksen J.B. y Goldenberg A.A. (1999) A unified
parametrized formulation of reasoning in fuzzy modeling and
control. Fuzzy Sets and Systems 108: 59-81.
[Fil91]
Filev D.P. (1991) A generalized defuzzification method via BAD
distributions. Internationa Journal of Intelligent Systems, 6: 687697.
[FY93]
Filev D.P. y Yager R. (1993) An adaptative approach to
defuzzification based on level sets. Fuzzy Sets and Systems, 54: 355360.
[Gol89]
Goldberg D.E. (1989) Genetic Algorithms in Search, Optimization,
and Machine Learning. Addison-Wesley.
[GQ91a]
Gupta M. M. y Qi J., (1991) Theory of T-norms and Fuzzy Inference
Methods. Fuzzy Sets and Systems 40: 431-450.
[GQ91b]
Gupta M. M. y Qi J., (1991) Design of Fuzzy Logic Controllers
Based on Generalized T-operators. Fuzzy Sets and Systems 40: 473489.
[HHG96]
Hollstein T., Halgamuge S. y Glesner M., (1996) Computer-Aided
Design of Fuzzy Systems Based on Generic VHDL Specifications,
IEEE Transactions on Fuzzy Systems 4 (4): 403-417.
M.
(1993)
An
220
Bibliografía
[Hir93]
Hirota K. (ed) (1993) Industrial Applications of Fuzzy Technology.
Springer-Verlag.
[HDR93]
Hellendoorn H., Driankov D. y Reinfrank M. (1993) An Introduction
to Fuzzy Control. Springer Verlag.
[Hol75]
Holland J. H. (1975) Adaptation in Natural and Artificial Systems.
Annbor: The University of Michigan Press.
[HT93]
Hellendoorn H. y Thomas C. (1993) Defuzzification in Fuzzy
Controllers. Journal of Intelligent and Fuzzy Systems 1: 109-123.
[Hel93]
Hellendoorn H. (1993) Design and Development of Fuzzy Systems
at Siemens R&D. Proceedings of the FUZZ-IEEE'93: 1365-1370.
San Francisco.
[Jia96]
Jiang T. y Li Y. (1996) Generalized defuzzification strategies and
their parameter learning procedures. IEEE Transactions on Fuzzy
Systems, 4 (1): 64-71.
[Jia97]
Jiang T. y Li Y. (1997) Multimode-oriented polynomial
transformation-based defuzzification strategy and parameter
learning procedure. IEEE Transactions on Systems, Man and
Cybernetics, 27 (5): 877-883.
[JS99]
Jin J., Seelen W. Von. (1999) Evaluating flexible fuzzy controllers
via evolution strategies. Fuzzy Sets and Systems 108: 243-252.
[JVB92]
Jager R., Verbruggen H.B. y Bruijn P. (1992) The role of
defuzzification methods in the applications of fuzzy control.
Preprints of the SICICA’92: 111-116.
[KF98]
Kandel A. y Friedman M. (1998) Defuzzification using most typical
values. IEEE Transactions on Systems, Man, and Cybernetcis, 28
(6): 901-906.
[Kie97]
Kiendl H. (1997) Non-translation-invariant defuzzification.
Proceedings of the 6th FUZZ-IEEE'97: 737-741. Barcelona.
Kiszka M., Kochanska M. y Sliwinska D. (1985) The influence of
some fuzzy implications operators on the accuracy of a fuzzy model.
Partes I y II. Fuzzy Sets and Systems, 15: 111-128, 223-240.
[KKS85]
[KY95]
Klir G. J. y Yuan B. (1995) Fuzzy Sets and Fuzzy Logic. PrenticeHall.
Bibliografía
221
[Lar80]
Larsen P.M. (1980) Industrial Applications of Fuzzy Logic Control,
International Journal Man. Match. Studies 12: 3-10.
[Lee90]
Lee C.C. (1990) Fuzzy Logic in Control Systems: Fuzzy Logic
Controller - Partes I,II. IEEE Transactions on Systems, Man and
Cybernetics, 20 (2): 404-418, 419-435.
[LK99]
Leekwijck W.V. y Kerre E.E. (1997) Defuzzification: criteria and
classification, Fuzzy Sets and Systems, 108: 159-178.
[LT91]
Lembessis E. y Tanscheit R. (1991) The influence of implication
operators and defuzzification methods on the deterministic output
of a fuzzy rule-based controller. Proceedings of the 4th IFSA Congr.:
109-114.
[MA75]
Mamdani E. H. y Assilian S. (1975) An experiment in linguistic
synthesis with a fuzzy logic controller. International Journal of
Man-Machine Studies 7: 1-13.
[Mam74]
Mamdani E. H. (1974) Applications of fuzzy algorithms for control a
simple dynamic plant. Proceedings of the IEEE 121 (12): 1585-1588.
[Men95]
Mendel J. M. (Marzo 1995) Fuzzy logic systems for engineering: a
tutorial. Proceedings of the IEEE 83 (3): 345-377.
[MS89]
Magrez P. y Smets P. (1989) Fuzzy modus ponens: a new model
suitable for applications in knowledge-based systems. International
Journal of Intelligent Systems 4: 181-200.
[Mic96]
Michalewicz Z. (1996) Genetic Algorithms + Data Structures =
Evolution Programs. Springer-Verlag.
[Miz87]
Mizumoto M. (1987) Fuzzy controls under various approximate
reasoning methods. Preprints of 2nd IFSA Congr.: 143-146.
[Miz89]
Mizumoto M. (1989) Pictorial Representations of Fuzzy
Connectives, Part I: Cases of T-norms, T-conorms and Averaging
Operators. Fuzzy Sets and Systems 31: 217-242.
[MZ82]
Mizumoto M. y Zimmerman H.J. (1992) Comparison of Fuzzy
Reasoning Methods. Fuzzy Sets and Systems 8: 253-283.
[PDH97]
Palm R., Driankov D. y Hellendoorn H. (1997) Model Based Fuzzy
Control. Springer-Verlag.
222
Bibliografía
[Ped96]
Pedrycz W. (ed) (1996) Fuzzy Modeling: Paradigms and Practice.
Kluwer Academic Press.
[PYL92]
Pfluger N., Yen J. y Langari R. (1992) A Defuzzification Strategy for
a Fuzzy Logic Controller Employing Prohibitive Information in
Command Formulation. Proceedings of the FUZZY-IEEE’92: 712723. San Diego.
[RG93a]
Runkler T. A. y Glesner M. (1993) A Set of Axioms for
Defuzzification Strategies Towards a Theory of Rational Defuzzification Operators. Proceedings of the FUZZY-IEEE’93: 1161-1166.
San Francisco.
[RG93b]
Runkler T. A. y Glesner M. (1993) Defuzzification with Improved
Static and Dynamic Behavior: Extended Center of Area.
Proceedings of the 1st EUFIT: 845-851.
[RPPARP99]
Rojas I., Pomares H., Pelayo F.J., Anguita M., Ros E. y Prieto A.
(1999) New methodology for the developement of adaptative and
self-learning fuzzy controllers in real time. International Journal of
Approximate Reasoning 21: 109-136.
[Run97]
Runkler T.A. (1997) Selection of appropriate defuzzification
methods using application specific properties. IEEE Transactions
on Fuzzy Systems, 5 (1): 72-79.
[Sch95]
Schwefel H. P. (1995) Evolution and Optimum Seeking. SixthGeneration Computer Technology Series. John Wiley and Sons.
[SK88]
Sugeno M. y Kang G.T. (1988) Structure identification of fuzzy
model, Fuzzy Sets and Systems, 28: 15-33.
[SY93]
Sugeno M. y Yasukawa T. (Febrero 1993) A fuzzy-logic-based
approach to qualitative modelling. IEEE Transactions on Fuzzy
Systems 1 (1):7-31.
[Tri97]
Trillas E. (1997) On a mathematical model for indicative
conditionals Proceedings of the 6th FUZZ-IEEE’97: 3-10. Barcelona.
[TS85]
Takagi T. y Sugeno M. (Febrero 1985) Fuzzy identification of
systems and its application to modeling and control. IEEE
Transactions on Systems, Man, and Cybernetics 15 (1):116-132.
Bibliografía
223
[Tsu79]
Tsukamoto T. (1979) An approach to fuzzy reasoning method. En
Gupta M. M., Ragade R. K. y Yager R. R. (eds) Advances in Fuzzy
Set Theory and Applications, North-Holland, Amsterdam.
[TV85]
Trillas E. y Valverde L. (1985) On Implication and
Indistiguishability in the Setting of Fuzzy Logic. Kacpryzk J. y
Yager R. (eds)., Management Decision Support Systems Using Fuzzy
Sets and Possibility Theory: 198-212. Verlag TÜV Rheinland.
[Wan94]
Wang L. X. (1994) Adaptative Fuzzy Systems and Control. PrenticeHall.
[Wie97]
Wierman M.J. (1997) Central values of fuzzy numbers. Information
Sciences 100: 207-215.
[WM92]
Wang L. X. y Mendel J. M. (Noviembre 1992) Generating fuzzy
rules by learning from examples. IEEE Transactions on Systems,
Man, and Cybernetics 22 (6): 1414-1427.
[YF93]
Yager R. R. y Filev D.P. (1993) SLIDE: A simple adaptative
defuzzification method. IEEE Transactions on Fuzzy Systems, 1 (1):
69-78.
[YT97]
Yeung D. S. y Tsang E. C. C. (1997) Weighted fuzzy production
rules. Fuzzy Sets and Systems 88: 299-313.
[Zad65]
Zadeh L. A. (Febrero 1965) Fuzzy sets. Information and Control 8:
338-353.
[Zad73]
Zadeh L. A. (1973) Outline of a new approach to the analysis of
complex systems and decision processes. IEEE Transactions on
Systems, Man and Cybernetics 3: 28-44.
[Zim96]
Zimmerman H. J. (1996) Fuzzy Sets Theory and Its Applications.
Kluwer Academic.
![POLÍTICA DE CALIDAD [ PQ ] - Universitat Politècnica de Catalunya](http://s2.studylib.es/store/data/004806655_1-6c5792dea36e0d4a7e08b3e06b866468-300x300.png)