b) Construya el diagrama de bloques incluyendo un
Anuncio
 Construya el diagrama de bloques incluyendo un")
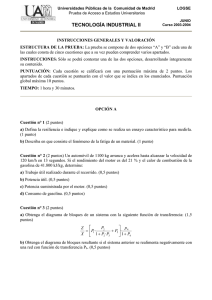
Universidad Simón Bolívar Departamento de Procesos y Sistemas Instrumentación y Control (PS 1316) Profa. Yamilet Sánchez Montero Sección No. 01, Enero-Marzo 2006 TAREA No. 1 FECHA DE ENTREGA: MIÉRCOLES 01/02/06 1. Un tanque con un serpentín por el que circula vapor se utiliza para calentar un fluido de capacidad calórica Cp. Se supone constante la retención de líquido en el tanque. a) Obtenga la relación de transferencia de la temperatura T ante perturbaciones tanto en el caudal F del fluido de entrada, como en su temperatura Te. Suponga conocidas las funciones de transferencia siguientes: Gc(s): controlador; Gv(s): válvula; Gm(s): medidor; G1(s): serpentín. b) Construya el diagrama de bloques incluyendo un esquema de control en retroalimentación simple, para regular T. 2. Se muestra en la Figura un sistema acoplado de resortes y masas. Obtenga la ecuación diferencial que describe el sistema. 3. La Figura que se muestra a continuación representa un sistema de control de caudal, donde un fluido incompresible entra en un depósito abierto. Supóngase que el cambio en el caudal de salida ∆Q2 es proporcional al cambio en altura ∆H, y en el estado estacionario Q1 = Q2 y Q2 = kH1/2. Obtenga la función de transferencia del depósito, Q2(s)/Q1(s). 4. En la Figura se muestra un sistema de control electromecánico a lazo abierto. El generador que se mueve a una velocidad constante, proporciona el voltaje de excitación para el motor. El motor tiene una inercia Jm y una fricción fm. Obtenga la función de transferencia θL(s)/vf(s), y dibuje el diagrama de bloques del sistema. El voltaje del generador vg puede suponerse proporcional a la corriente de excitación if. 5. La Figura muestra esquemáticamente un reactor de área A constante en el cual se mezclan los flujos A y B cuyos caudales y temperaturas de entrada son QA, TA y QB, TB respectivamente. El caudal de salida se puede definir en función de la altura de líquido en el reactor como QS = CV H , y se puede considerar que la temperatura de salida es igual a la del reactor TR. Con el objeto de enfriar el contenido del reactor y mantener controlada la temperatura del mismo, éste está cubierto por una camisa a través de la cual circula un fluido (capaz de almacenar calor) con un calor específico CpC y una densidad ρC, ambos constantes. La masa encerrada en la camisa es constante e igual a MC, pues el caudal de entrada y el de salida de la misma son iguales (QC). La temperatura de entrada a la camisa es T1 y la de salida es igual a la temperatura de la camisa TC. El líquido contenido en el reactor es capaz de almacenar calor con un calor específico igual a CpR y una densidad igual a ρR, ambos constantes. Considere que el flujo de calor entre el líquido y la camisa, y entre la camisa y el ambiente, pueden & definirse como Q XY = K XY ( TX − TY ) si el calor va de X a Y. Con el objeto de analizar el comportamiento del sistema obtenga: a) Modelo del sistema. b) Función de transferencia entre la temperatura del reactor TR y el caudal de la camisa QC (considere constantes las temperaturas TA, TB y T1 y los caudales QA y QB). 6. N. Minorsky, ingeniero de control, diseñó en la década de 1930 un nuevo sistema de dirección para la Marina de los Estados Unidos. El sistema está representado por el diagrama de bloques que se muestra en la Figura, donde Y(s) es el rumbo del barco, R(s) es el rumbo deseado y A(s) es el ángulo del timón. Determine la función de transferencia Y(s)/R(s). 7. Un sistema de frenos de un automóvil de cuatro ruedas independientes emplea realimentación electrónica para controlar automáticamente la fuerza de frenado en cada rueda. En la Figura que se presenta a continuación se muestra un diagrama de bloques del modelo del sistema de control de frenos, donde F1(s) y Fr(s) son la fuerza de frenado de las ruedas delanteras y de las traseras respectivamente, y R(s) es la respuesta deseada del automóvil en una carretera cubierta con una capa de hielo. Determine las funciones de transferencia de Ff(s)/R(s) y FR(s)/R(s) a partir de la reducción del diagrama de bloques y de la fórmula de Mason. 8. El sistema de control de posición de una plataforma espacial está gobernado por las ecuaciones siguientes: d2p dp dθ +2 + 4p = θ v1 = r − p = 0,6v 2 v 2 = 7v 1 2 dt dt dt Las variables que están implicadas son: r(t)=posición deseada de la plataforma; p(t)=posición real de la plataforma; v1(t)=voltaje de entrada del amplificador; v2(t)=voltaje de salida del amplificador; θ(t)=posición del eje del motor. Dibuje el diagrama de flujo de señal y el diagrama de bloques del sistema, identificando las partes que lo componen y sus funciones de transmitancias. Determine la función de transferencia del sistema P(s)/R(s). 9. Encontrar la función de transferencia Y1(s)/R2(s) para el sistema que se muestra a continuación a partir de la reducción del diagrama de bloques y de la fórmula de Mason. 10. Encuentre la función de transferencia C(s)/R(s) para los siguientes diagramas.


![A↔ B (-rA) = 0.04CA-0.01CR, [=] mol*L](http://s2.studylib.es/store/data/005357341_1-6e8dd554fb791e1c2c9f555a9c29f5b3-300x300.png)