Descargar - Monografias.com
Anuncio

v1
5
4
1
S
v2
2
Introducción al Método
de los Elementos Finitos
Parte 1
Introducción al MEF para problemas elípticos
Alberto Cardona, Víctor Fachinotti
Cimec-Intec (UNL/Conicet), Santa Fe, Argentina
1. Introducción al MEF para problemas elípticos
•
Problemas elípticos “modelo” y solución por MEF
– Problema simple 1-D
– Generalización a 2-D
•
Propiedades básicas del método
Introducción al Método de los Elementos Finitos
2
(1.1) Formulación variacional del problema 1-D
•
Sea el problema de valores de frontera:
(D)
donde u ' =
du
;
dx
− u '' = f ( x) ,
u (0) = u (1) = 0
0 < x <1
f ( x) es una función continua dada.
•
Integrando 2 veces, vemos que el problema tiene solución única u.
•
(D) puede describir cualquiera de los siguientes problemas de Mecánica del
continuo:
A. Barra elástica
B. Cuerda elástica
C. Conducción del calor en una barra
Introducción al Método de los Elementos Finitos
3
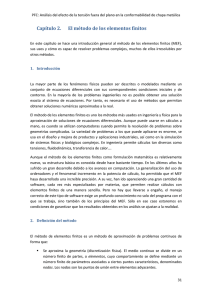
A) Barra elástica
Barra elástica sujeta en ambos extremos y sometida a carga axial de intensidad f(x)
Bajo hipótesis de pequeños desplazamientos y material elástico lineal:
σ = Eu '
−σ ' = f
Ley de Hooke
u (0) = u (1) = 0
Ec. de equilibrio
Cond. de borde
donde E es el módulo de elasticidad. Asumiendo E=1
(D)
− u '' = f ( x)
,
0 < x <1
u (0) = u (1) = 0
Introducción al Método de los Elementos Finitos
4
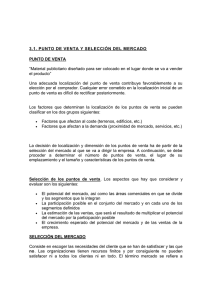
B) Cuerda elástica
Cuerda elástica sujeta en ambos extremos, con tensión unitaria y sometida a carga
transversal de intensidad f(x)
Bajo hipótesis de pequeños desplazamientos y material elástico lineal:
(D)
− u '' = f ( x)
,
0 < x <1
u (0) = u (1) = 0
Introducción al Método de los Elementos Finitos
5
C) Conducción de calor en una barra
Barra sometida a fuente de calor distribuida f(x), con temperatura nula en ambos
extremos.
Bajo condiciones estacionarias y material lineal:
−q = ku '
Ley de Fourier
−q ' = f
u (0) = u (1) = 0
Ec de equilibrio
Cond de borde
donde k es el conductividad. Asumiendo k=1
(D)
− u '' = f ( x) ,
0 < x <1
u (0) = u (1) = 0
Introducción al Método de los Elementos Finitos
6
Problemas de minimización y variacional
Veremos que la solución al problema (D) es también solución del problema de
minimización (M) y de un problema variacional (V)
Para formular (M) y (V) introducimos nueva notación.
1. Producto interno (v,w):
1
(v, w) = ∫ v( x) w( x) dx
0
para funciones reales acotadas continuas por tramos v, w.
2. Espacio lineal V:
V = {v / v funcion continua sobre [ 0,1] ,
v ' es continua p/tramos y acotada en [ 0,1] ,
v(0) = v(1) = 0
3. Funcional lineal
}
F :V →
1
F (v) = (v ', v ') − ( f , v)
2
Introducción al Método de los Elementos Finitos
7
Problemas de minimización y variacional (cont)
Problema (M):
(M)
Hallar u ∈ V
/
F (u ) ≤ F (v ) ∀ v ∈ V
(V)
Hallar u ∈ V
/ (u ', v ') = ( f , v ) ∀ v ∈ V
Problema (V):
Nota: en el contexto de los problemas (A) y (B)
F (v )
es la energía potencial total asociada al desplazamiento v
1
(v ', v ') es la energía elástica interna
2
( f , v)
es el potencial de cargas
Problema (M): principio de mínima energía potencial en Mecánica
Problema (V): principio de trabajos virtuales en Mecánica
Veremos la equivalencia de los problemas (D), (V) y (M)
Introducción al Método de los Elementos Finitos
8
La solución de (D) es solución de (V)
1. Multiplicamos −u '' = f por una función arbitraria v ∈ V (func. de test).
Integramos sobre (0,1):
−(u '', v) = ( f , v)
2. Integramos por partes el lado izquierdo, y usamos v(0)=v(1)=0:
−(u '', v) = −u '(1)v(1) + u '(0)v(0) + (u ', v ') = (u ', v ')
3. Al ser v arbitraria:
(u ', v ') = ( f , v)
∀ v ∈V
(1.1)
Introducción al Método de los Elementos Finitos
9
o sea, u es solución de (V)
Los problemas (M) y (V) tienen la misma solución
v ∈V y w = v − u / v = u + w ∧ w ∈V .
1. Sea u solución de (V). Sea
1
Luego:
F (v) = F (u + w) = ( u '+ w ', u '+ w ') − ( f , u + w) =
2
1
1
= ( u ', u ') − ( f , u ) + (u ', w ') − ( f , w) + ( w ', w ') ≥ F (u )
2
2
= 0 por (1.1)
F (u )
≥0
o sea, u es solución del problema (M).
•
Sea u solución de (M). Luego
∀ v ∈V y ε ∈
: F (u ) ≤ F (u + ε v)
(*)
Definiendo:
g (ε )
1
ε2
F (u + ε v) = (u ', u ') + ε (u ', v ') + (v ', v ') − ( f , u ) − ε ( f , v)
2
2
Por (*) g (ε ) tiene un mínimo en ε = 0 . Luego :
g '(0) = (u ', v ') − ( f , v)
=
0
g ( ε ) min en 0
o sea, u es solución del problema (V).
Introducción al Método de los Elementos Finitos
10
La solución de (V) es única
1. Sean u1 , u2
soluciones de (V):
u1 , u2 ∈ V y
(u '1 , v ') = ( f , v)
∀ v ∈V
(u '2 , v ') = ( f , v)
∀ v ∈V
2. Sustrayendo, y eligiendo v = u1 − u2 ∈ V
∫
1
0
(u '1 − u '2 ) 2 dx = 0
lo cual muestra que:
u '1 ( x) − u '2 ( x) = (u1 − u2 ) ' ( x) = 0
∀ x ∈ (0,1)
3. Usando la condición de borde:
u1 (0) = u2 (0) = 0 ⇒ u1 ( x) = u2 ( x) ∀ x ∈ [ 0,1]
o sea, la solución a (V) es única.
Introducción al Método de los Elementos Finitos
11
Equivalencia de soluciones a (D), (V) y (M)
1. Hasta ahora hemos visto que si u es solución a (D), luego es solución a los
problemas equivalentes (V) y (M) :
( D) ⇒ (V ) ⇔ ( M )
Mostraremos que si u es solución de (V), luego u satisface (D).
2. Sea
u ∈V
/
1
1
0
0
∫ u ' v ' dx −∫
fv dx = 0 ∀ v ∈ V
Asumimos u '' existe y es continua. Integ.p/partes y usando v(0) = v(1) = 0
1
1
0
0
− ∫ u '' v dx − ∫ fv dx + u ' v 0 = 0
1
− ∫ (u ''+ f )v dx = 0
0
Como (u ''+ f ) es continua, luego:
(u ''+ f ) ( x) = 0
1
∀
v ∈V
0 < x <1
o sea, u es solución de (D).
Introducción al Método de los Elementos Finitos
12
Equivalencia de soluciones (D), (V) y (M)
Resumiendo: Hemos demostrado que
1. La solución de la ecuación diferencial es solución de un problema
variacional
2. La solución del problema variacional es también solución de un problema de
minimización y viceversa
3. La solución del problema variacional es única
4. Si se cumple un requisito de regularidad (u” continua), la solución del
problema variacional es también solución de la ecuación diferencial
Notar: Las soluciones a los problemas variacional y de minimización vistos hasta
ahora tienen dimensión infinita, no pueden hallarse en computadora.
Veremos ahora cómo el MEF construye aproximaciones de dimensión finita a las
soluciones de (V) y (M).
Introducción al Método de los Elementos Finitos
13
(1.2) MEF p/problema modelo c/funciones lineales p/tramos
1. Construiremos un subespacio de dimensión finita Vh del espacio V ,
consistente en funciones lineales p/tramos.
2. Sea
0 < x0 < x1
xM < xM +1 = 1
una partición del intervalo (0,1) en subintervalos I j = ( x j −1 , x j ) de longitud
h j = x j − x j −1 , j = 1, M + 1
La cantidad h = max h j es una medida de la densidad de la partición.
Introducción al Método de los Elementos Finitos
14
Subespacio de funciones lineales por tramos
1. Sea
Vh = {v / v es lineal en cada subintervalo I j
v es continua en el [ 0,1]
}
v(0) = v(1) = 0
Ejemplo de v ∈ Vh
Notar que
Vh ⊂ V
2. Para describir v ∈ Vh elegimos los valores
η j = v( x j ) en los nodos x j ,
Introducción al Método de los Elementos Finitos
j = 1,
M
15
Subespacio de funciones lineales por tramos
3. Definimos funciones de base ϕ j ( x) ∈ Vh ,
⎧1 si i = j
=
=
ϕ j ( xi ) δ ij ⎨
⎩0 si i ≠ j
j = 1,
M
i, j = 1,
M
ϕ j ( x) : función continua
lineal por tramos que verifica
la propiedad delta.
4. Toda función v ∈ Vh puede ser escrita en forma única como combinación
lineal de las funciones de base ϕi ( x) :
M
v ( x ) = ∑ ηi ϕi ( x )
i =1
x ∈ [ 0,1] , ηi = v( xi )
Luego, Vh es un espacio vectorial lineal de dimensión M con base:
Introducción al Método de los Elementos Finitos
{ϕi }i =1
M
16
MEF para problema modelo (D)
1. Formulación como problema de minimización discreto:
(M h )
Hallar uh ∈ Vh
/
F (uh ) ≤ F (v) ∀ v ∈ Vh
(método Ritz)
2. De la manera ya vista, es equivalente al problema variacional discreto:
(1.2)
(Vh )
Hallar uh ∈ Vh
/ (uh ', v ') = ( f , v) ∀ v ∈ Vh
(método Galerkin)
3. Notar, que si uh ∈ Vh satisface (1.2), luego en particular
(uh ', ϕ j ') = ( f , ϕ j )
(1.3)
j = 1,
M
(además, si se cumple (1.3), luego vale (1.2) ∀ v ∈ Vh )
M
4. Siendo uh ( x) = ∑ ξi ϕi ( x) , ξi = uh ( xi ) , escribimos (1.3) en la forma:
i =1
∑ ξ (ϕ ', ϕ ') = ( f , ϕ )
M
i =1
i
i
j
j
j = 1,… , M
Sistema de M ecuaciones algebraicas lineales con M incógnitas ξi
Introducción al Método de los Elementos Finitos
17
Forma matricial
A ξ
(1.5)
⎡ (ϕ1 ', ϕ1 ') (ϕ1 ', ϕ 2 ')
⎢ (ϕ ', ϕ ') (ϕ ', ϕ ')
2
2
⎢ 2 1
⎢
⎢
⎢⎣(ϕ M ', ϕ1 ')
= b
(ϕ1 ', ϕ M ') ⎤ ⎧ ξ1 ⎫ ⎧ b1 ⎫
⎥ ⎪ξ ⎪ ⎪b ⎪
⎥ ⎪⎨ 2 ⎪⎬ = ⎪⎨ 2 ⎪⎬
⎥⎪ ⎪ ⎪ ⎪
⎥
(ϕ M ', ϕ M ') ⎥⎦ ⎩⎪ξ M ⎭⎪ ⎪⎩bM ⎭⎪
A : matriz de rigidez
b : vector de cargas
bi = ( f , ϕi )
Los elementos aij = (ϕi ', ϕ j ') pueden
calcularse fácilmente.
Notar:
(ϕ ', ϕ ') = 0
i
j
si
i − k >1
Luego A es tridiagonal
Introducción al Método de los Elementos Finitos
18
Sistema de ecuaciones
Entonces:
x j +1 1
1
1
1
dx
+
dx
=
+
∫
x j −1 h 2
x j h2
h j h j +1
j
j +1
a jj = (ϕ j ', ϕ j ') = ∫
xj
1
1
dx
=
−
x j −1 h 2
hj
j
a j ( j −1) = (ϕ j ', ϕ j −1 ') = − ∫
1. A es simétrica pues:
xj
(ϕ ', ϕ ') = (ϕ
i
j
j
j = 1,
M
j = 2,
M
', ϕi ')
M
2. A es definida positiva pues siendo v( x) = ∑ ηi ϕi ( x)
i =1
M
⎛M
⎞
',
'
',
'
η
ϕ
ϕ
η
η
ϕ
η
ϕ
=
⎜ ∑ i i ∑ j j ⎟ = ( v ', v ' ) ≥ 0
∑
i ( i
j ) j
i , j =1
j =1
⎝ i =1
⎠
M
Como v(0) = 0
Entonces:
luego:
⎧> 0 casi siempre
⎨
⎩ = 0 solo si v ' = 0
luego (v ', v ') = 0 ⇔ v = 0 o sea: η j = 0
ηT Aη > 0 ∀ η ∈
M
j = 2, M
,η ≠ 0
A simétrica y definida positiva
Introducción al Método de los Elementos Finitos
19
Propiedades sistema de ecuaciones (1.5)
1. A sim > 0
A es no singular y el sistema (1.5) tiene solución única
2. A es rala, o sea pocos elementos de A son distintos de cero.
Esto se debe a que ϕ j tiene soporte local ( ϕ j ≠ 0 en un intervalo pequeño,
interfiriendo con pocas funciones ϕ k ).
1
3. Si la partición es uniforme, h j = h =
y logramos
M +1
0⎤
⎡ 2 −1
⎢ −1 2 −1
⎥
⎥
1⎢
⎥
A= ⎢
−1
h⎢
⎥
2
1
−
⎢
⎥
⎢⎣ 0
−1 2 ⎥⎦
Introducción al Método de los Elementos Finitos
20
(1.3) Estimación de error del MEF para problema modelo
Sean
− u '' = f ( x) ,
u (0) = u (1) = 0
⎧
u solucion de (D) ⎨
⎩
Hallar uh ∈ Vh
uh solucion de (Vh )
0 < x <1
/ (uh ', v ') = ( f , v) ∀ v ∈ Vh
Recordando que
(u ', v ') = ( f , v)
y como Vh ⊂ V
∀ v ∈V
( ( u − u ) ', v ') = 0
∀ v ∈V
h
Ecuación del error
donde u − uh es el error de la aproximación
Veremos que en cierto modo, uh es la mejor aprox posible a la sol exacta u
Norma asociada al producto escalar ( , ):
Desigualdad de Cauchy:
( v, w ) ≤
w
( w, w )
1
2
=
( ∫ w dx )
1
2
1
2
0
v w
Introducción al Método de los Elementos Finitos
21
Estimación de error del MEF para problema modelo
( u − uh ) '
Teo 1.1)
≤ (u − v ) '
∀ v ∈ Vh
D) Sean v ∈ Vh arbitraria y w = uh − v ∈ Vh . Reemplazando v por w en la
ecuación del error:
( u − uh ) '
2
= ( ( u − uh ) ', ( u − uh ) ') + ( ( u − uh ) ', w ') = ( ( u − uh ) ', ( u − uh + w ) ') =
= ( ( u − uh ) ', ( u − v ) ') ≤
=0
ecuacion del error
( u − uh ) ' ( u − v ) '
∀ v ∈V
Cauchy
Luego
( u − uh ) '
≤ (u − v ) '
∀ v ∈ Vh
Para lograr una estimación cuantitativa del error, usamos una uh ∈ Vh elegida
convenientemente. Por el resultado anterior:
( u − uh ) '
≤ ( u − uh ) '
Introducción al Método de los Elementos Finitos
22
Estimación del error
Haremos uh ∈ Vh interpolante de u , o sea:
uh ( x j ) = u ( x j )
j = 0,
M +1
En Análisis Numérico, se ve que:
u′( x) − uh′ ( x) ≤ h max u ′′( y )
0 ≤ y ≤1
Luego, por el teorema y (1.12):
h2
max 0≤ y ≤1 u ′′( y )
u ( x ) − uh ( x ) ≤
8
( u − uh )′
Mediante análisis detallado, se puede mostrar :
≤ h max u ′′( y )
0 ≤ y ≤1
( u − uh )
≤ o ( h2 )
Notar:
• No necesitamos construir explícitamente uh , sino sólo la estimación de error
del interpolante.
• u ′ es una deformación o tensión, y tiene interés práctico la estimación de su
error
Introducción al Método de los Elementos Finitos
23
(1.4) MEF para la ecuación de Poisson
Sea el problema:
con
⎧−Δu = f en Ω
(D) ⎨
⎩ u = 0 sobre Γ
∂ 2u ∂ 2u
Δu = 2 + 2
∂x1 ∂x2
Puede corresponder a muchos problemas físicos: conducción de calor, potencial
electromagnético, desplazamiento de una membrana fija en la frontera, etc.
Teorema de la divergencia:
∫
Ω
con:
⎧ A1 ⎫
A=⎨ ⎬
⎩ A2 ⎭
Fórmula de Green:
div A dx = ∫ A ⋅ n ds
Γ
∂A1 ∂A2
div A =
+
∂x1 ∂x2
∫
Ω
⎧ n1 ⎫
n=⎨ ⎬
⎩n2 ⎭
∇v ⋅∇w dx = ∫ v ( ∇w ⋅ n ) ds − ∫ v Δw dx
Γ
Introducción al Método de los Elementos Finitos
Ω
24
Formulación variacional
1. Si u satisface (D), luego es solución de:
Hallar u ∈ V
(V)
con
/ a (u , v ) = ( f , v ) ∀ v ∈ V
a (u , v) = ∫ ∇u ⋅∇v dx
(forma bilineal)
( f , v) = ∫ f v dx
Ω
∂v ∂v
V = {v : (i) v es continua en Ω ; (ii)
,
continuas a trozos en Ω ;
∂x1 ∂x2
Ω
(iii) v = 0 sobre Γ
D) Multiplicamos (D) por una v ∈ Vh arbitraria e integramos
}
( f , v) = − ∫ v Δu dx = − ∫ v ( ∇u ⋅ n ) ds + ∫ ∇u ⋅∇v dx = a (u , v)
Ω
Γ
Ω
= 0 ( v = 0 en Γ )
a ( u ,v )
2. Como en el caso 1-D, si u suficientemente regular :
con
(M)
Hallar u ∈ V
/
( D) ⇔ (V ) ⇔ ( M )
F (u ) ≤ F (v ) ∀ v ∈ V
Energía potencial total:
F (v ) =
1
a ( v, v ) − ( f , v )
2
Introducción al Método de los Elementos Finitos
25
Subespacio de funciones lineales por tramos
1. Construiremos un subespacio de dimensión finita Vh ⊂ V consistente en
funciones lineales p/tramos.
2. Asumimos Γ poligonal. Sea una triangulación de Ω : Th = K1 , K 2 , K m con
triángulos no superpuestos K i /
Ω= K ∪K ∪ ∪K =
K
1
2
∩ K = {∅}
m
∪
K ∈Th
K ∈Th
y de forma que no haya ningún vértice de algún triángulo ubicado sobre el
lado de otro.
El parámetro de malla h = max diam( K ) mide la densidad de triangulación.
K ∈Th
Introducción al Método de los Elementos Finitos
26
Subespacio de funciones lineales por tramos (cont)
3. Definimos
Vh = {v : (i) v es continua en Ω ; (ii) v K es lineal para K ∈ Th ;
(iii) v = 0 sobre Γ
Notar Vh ⊂ V
4. Parámetros p/def. v ∈ Vh : valores v( N i ) de v en los nodos N i
Excluimos los nodos de frontera pues v = 0 sobre Γ.
5. Def. funciones de base : ϕ j (x) ∈ Vh
i = 1,
}
M de Th
/
⎧1 si i = j
ϕ j ( N i ) = δ ij = ⎨
⎩0 si i ≠ j
i, j = 1,
M
Soporte de ϕ j (x) = {x / x ∈ Th con nodo N j }
Introducción al Método de los Elementos Finitos
27
Subespacio de funciones lineales por tramos (cont)
6. Toda función v ∈ Vh tiene luego la representación:
M
v ( x ) = ∑ ηi ϕi ( x )
i =1
x ∈ Ω , ηi = v ( N i )
7. Formulamos luego el siguiente MEF p/el problema de Poisson (D):
Hallar uh ∈ Vh
(Vh )
/ a (uh , v) = ( f , v) ∀ v ∈ Vh
8. De manera similar al caso 1-D, este problema es equivalente a resolver el
sistema de ecuaciones:
A ξ = b
donde ahora: a = a (ϕ , ϕ ) = ∇ϕ ⋅∇ϕ dx
ij
i
j
∫ i j
Ω
ξ i = uh ( N i )
bi = ( f , ϕi ) = ∫ f ϕi dx
Ω
9. Nuevamente A es simétrica, definida positiva y no singular, con lo cual el
sistema de ecuaciones tiene solución única. Además, A es rala pues:
aij = 0
si Ni , N j ∉ al mismo triángulo
Introducción al Método de los Elementos Finitos
28
Noción de mejor aproximación
1. uh ∈ Vh es la mejor aproximación a la solución u en el sentido:
∇u − ∇ u h ≤ ∇ u − ∇ v
con v
a ( v, v )
1
2
=
(∫
Ω
∇v dx
2
)
1
∀ v ∈ Vh
2
2. En particular, si encontramos uh ∈ Vh tal que
∇u − ∇ u h ≤ ∇ u − ∇ u h
podremos probar convergencia. Ejemplo, usando el interpolante
uh ( N j ) = u ( N j )
j = 1, M
tendremos: ∇u − ∇uh ≤ Ch con C>0 cte independiente de h, que depende de:
•
•
tamaño derivadas segundas de u
menor ángulo de los triángulos K ∈ Th
3. Puede mostrarse luego:
u − uh ≤
( ∫Ω (u − uh )
2
dx
)
1
2
≤ Ch 2
4. Así, si u es sufic. regular, el error y su gradiente tienden a cero con h → 0
Introducción al Método de los Elementos Finitos
29
Cálculo matriz rigidez
1. Los elementos aij = a (ϕi , ϕ j ) son calculadas por suma de contribuciones de
los distintos triángulos:
a (ϕi , ϕ j ) = ∫ ∇ϕi ⋅∇ϕ j dx =
Ω
Notar que
a K (ϕ i , ϕ j ) ≠ 0
∑∫
K ∈Th
sólo si
K
∇ϕi ⋅∇ϕ j dx =
∑ a (ϕ , ϕ )
K ∈Th
K
i
j
Ni , N j ∈ K
2. Sean N i , N j y N k los nodos del triángulo K. Luego, la matriz de rigidez del
elemento K:
⎡ a K ( ϕ i , ϕ i ) a K (ϕ i , ϕ j ) a K ( ϕ i , ϕ k ) ⎤
AK
⎢
⎢
⎢
⎢
⎣
a K (ϕ j , ϕ j )
sim.
⎥
a K (ϕ j , ϕ k ) ⎥
⎥
a K (ϕ k , ϕ k ) ⎥
⎦
3. La matriz de rigidez global A es armada luego en 2 etapas:
1. Cálculo de las matrices de rigidez elementales
2. Sumatoria de las contribuciones de cada elemento (ensamble)
El vector de cargas b es armado de la misma manera.
Introducción al Método de los Elementos Finitos
30
Cálculo matriz rigidez elemental
1. Trabajamos con las restricciones de las funciones de base al triángulo K:
ψi
ϕi
K
2. ψ i es una función lineal /
⎧1 en el nodo i
{ψ i ( x),ψ j ( x),ψ k ( x)} base de fcs lineales en K
ψi = ⎨
⎩0 en los nodos j , k
3. Si w( x) es una función lineal en K, tiene luego la representación:
w( x) = w( N i )ψ i ( x) + w( N j )ψ j ( x) + w( N k )ψ k ( x)
4. La matriz de rigidez elemental:
AK
⎡ a (ψ i ,ψ i ) a (ψ i ,ψ j ) a (ψ i ,ψ k ) ⎤
⎢
⎥
⎢
a (ψ j ,ψ j ) a (ψ j ,ψ k ) ⎥
⎢
⎥
a (ψ k ,ψ k ) ⎥
⎢ sim.
⎣
⎦
Introducción al Método de los Elementos Finitos
31
Ejemplo
ψ i ( x, y ) = α i + β i x + γ i y
α i , βi , γ i
ψ i ( xi , yi ) = 1
ψ i (x j , y j ) = 0
ψ i ( xk , yk ) = 0
/
Resolviendo:
αi =
βi =
x j yk − xk y j
y j − yk
2Δ
2Δ
; γi =
xk − x j
2Δ
⇒
⎡1 xi
⎢1 x
j
⎢
⎢⎣1 xk
yi ⎤ ⎧α i ⎫ ⎧1 ⎫
⎪ ⎪ ⎪ ⎪
y j ⎥⎥ ⎨ β i ⎬ = ⎨0 ⎬
yk ⎥⎦ ⎩⎪ γ i ⎭⎪ ⎩⎪0 ⎭⎪
⎡1 xi
1
Δ = det ⎢⎢1 x j
2
⎢⎣1 xk
yi ⎤
y j ⎥⎥
yk ⎥⎦
(área triángulo)
⎧∂ψ i ⎫ ⎧∂ψ i ⎫
⎧ βi ⎫ ⎧ βi ⎫
⎪ ∂x ⎪ ⎪ ∂x ⎪
a (ψ i ,ψ i ) = ∫ ∇ψ i ⋅∇ψ i dx = ∫ ⎨
⋅⎨
dx = ∫ ⎨ ⎬ ⋅ ⎨ ⎬ dx = ( βi2 + γ i2 ) Δ
⎬
⎬
K
K ∂ψ
K γ
⎩ i ⎭ ⎩γ i ⎭
⎪ i ⎪ ⎪∂ψ i ⎪
⎩ ∂y ⎭ ⎩ ∂y ⎭
Luego:
a (ψ i ,ψ j ) = ∫ ∇ψ i ⋅∇ψ j dx = ( βi β j + γ iγ j ) Δ
K
Introducción al Método de los Elementos Finitos
32
Ejemplo
Matriz de rigidez elemental:
AK
⎡( β i2 + γ i2 )
⎢
Δ⎢
⎢
⎢ sim.
⎣
(β β
(β
i
j
+ γ iγ j )
2
j
+γ
2
j
)
( β i β k + γ iγ k ) ⎤
⎥
( β j β k + γ jγ k )⎥⎥
( β k2 + γ k2 ) ⎥⎦
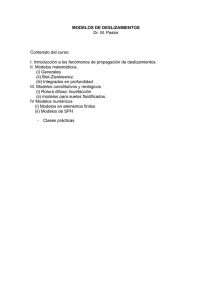
Ilustraremos el proceso de ensamble para el caso siguiente:
Elemento 1) i=1; j=2; k=3
α11 = 0
1
h
1
γ 11 = −
h
β11 = −
Sustituyendo:
α 21 = 0 α 31 = 0
β 21 =
1
h
β 31 = 0
γ 21 = 0 γ 31 =
⎡ 2 −1 −1⎤ ⎧ξ1 ⎫
1
⎪ ⎪
A1ξ1 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 2 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ3 ⎭⎪
Introducción al Método de los Elementos Finitos
33
1
h
Ejemplo
Por similaridad:
⎡ 2 −1 −1⎤ ⎧ξ 4 ⎫
1
⎪ ⎪
A 3ξ 3 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ1 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ 6 ⎭⎪
⎡ 2 −1 −1⎤ ⎧ξ5 ⎫
1
⎪ ⎪
A 5ξ 5 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 7 ⎬
2
⎪ ⎪
⎣⎢ −1 0 1 ⎥⎦ ⎩ξ1 ⎭
Elemento 2) i=3; j=6; k=1
α 32 = 0
α 62 = 0
α12 = 0
1
h
1
γ 32 =
h
β 62 =
1
h
β12 = 0
β32 =
γ 62 = 0
γ 12 = −
1
h
Luego:
⎡ 2 −1 −1⎤ ⎧ξ3 ⎫
1
⎪ ⎪
A 2ξ 2 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 6 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ1 ⎭⎪
⎡ 2 −1 −1⎤ ⎧ξ1 ⎫
1
⎪ ⎪
A 4ξ 4 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 4 ⎬
2
⎪ ⎪
⎣⎢ −1 0 1 ⎥⎦ ⎩ξ5 ⎭
Introducción al Método de los Elementos Finitos
⎡ 2 −1 −1⎤ ⎧ξ 2 ⎫
1
⎪ ⎪
A 6ξ 6 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ1 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ 7 ⎭⎪
34
Ensamble primer elemento
⎡ 2 −1 −1⎤ ⎧ξ1 ⎫
1
⎪ ⎪
A1ξ1 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 2 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ3 ⎭⎪
⎛
⎜
⎜
⎜
1 ⎜
Aξ=
⎜
2 ⎜
⎜
⎜
⎜
⎝
2
−1
−1
−1
−1
1
0
0
1
Introducción al Método de los Elementos Finitos
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
⎧ξ1 ⎫
⎪ξ ⎪
⎪ 2⎪
⎪ξ3 ⎪
⎪ ⎪
⎨ξ 4 ⎬
⎪ξ ⎪
⎪ 5⎪
⎪ξ 6 ⎪
⎪ ⎪
⎩ξ 7 ⎭
35
Ensamble segundo elemento
⎡ 2 −1 −1⎤ ⎧ξ3 ⎫
1
⎪ ⎪
A 2ξ 2 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 6 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ1 ⎭⎪
⎛
⎜
⎜
⎜
1 ⎜
Aξ=
⎜
2 ⎜
⎜
⎜
⎜
⎝
2 +1
−1
−1 − 1
0
−1
−1 − 1
1
0
0
1+ 2
−1
−1
1
0
Introducción al Método de los Elementos Finitos
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
⎧ξ1 ⎫
⎪ξ ⎪
⎪ 2⎪
⎪ξ3 ⎪
⎪ ⎪
⎨ξ 4 ⎬
⎪ξ ⎪
⎪ 5⎪
⎪ξ 6 ⎪
⎪ ⎪
⎩ξ 7 ⎭
36
Ensamble tercer elemento
⎡ 2 −1 −1⎤ ⎧ξ 4 ⎫
1
⎪ ⎪
A 3ξ 3 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ1 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ 6 ⎭⎪
⎛
⎜
⎜
⎜
1 ⎜
Aξ=
⎜
2 ⎜
⎜
⎜
⎜
⎝
2 +1+1
−1
−1 − 1
−1
−1 − 1
−1
1
0
0
1+ 2
0+0
−1
−1
0+0
2
−1
−1
−1
1+1
Introducción al Método de los Elementos Finitos
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
⎧ξ1 ⎫
⎪ξ ⎪
⎪ 2⎪
⎪ξ3 ⎪
⎪ ⎪
⎨ξ 4 ⎬
⎪ξ ⎪
⎪ 5⎪
⎪ξ 6 ⎪
⎪ ⎪
⎩ξ 7 ⎭
37
Ensamble cuarto elemento
⎡ 2 −1 −1⎤ ⎧ξ1 ⎫
1
⎪ ⎪
A 4ξ 4 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 4 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ5 ⎭⎪
⎛
⎜
⎜
⎜
1 ⎜
Aξ=
⎜
2 ⎜
⎜
⎜
⎜
⎝
2 +1+1+ 2
−1
−1 − 1 −1 − 1
−1
−1 − 1
−1 − 1
1
0
0
1+ 2
−1
0+0
−1
−1
0+0
2 +1
0
−1
−1
0
−1
1
Introducción al Método de los Elementos Finitos
1+1
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
⎧ξ1 ⎫
⎪ξ ⎪
⎪ 2⎪
⎪ξ3 ⎪
⎪ ⎪
⎨ξ 4 ⎬
⎪ξ ⎪
⎪ 5⎪
⎪ξ 6 ⎪
⎪ξ ⎪
⎩ 7⎭
38
Ensamble quinto elemento
⎡ 2 −1 −1⎤ ⎧ξ5 ⎫
1
⎪ ⎪
A 5ξ 5 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ 7 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎩⎪ξ1 ⎭⎪
⎛ 2 +1+1+ 2 +1
⎜
−1
⎜
⎜
−1 − 1
1 ⎜
−1 − 1
Aξ=
⎜
2 ⎜
−1 − 1
⎜
0+0
⎜
⎜
0
⎝
−1
−1 − 1 −1 − 1 −1 − 1 0 + 0
1
0
0
1+ 2
−1
2 +1
0
0
−1
1+ 2
Introducción al Método de los Elementos Finitos
−1
−1
1+1
−1
0 ⎞ ⎧ξ1 ⎫
⎟ ⎪ ⎪
⎟ ⎪ξ 2 ⎪
⎟ ⎪ξ3 ⎪
⎟ ⎪ ⎪
⎟ ⎨ξ 4 ⎬
−1 ⎟ ⎪ξ5 ⎪
⎟ ⎪ ⎪
⎟ ⎪ξ 6 ⎪
1 ⎟⎠ ⎪⎩ξ 7 ⎭⎪
39
Ensamble sexto elemento
⎡ 2 −1 −1⎤ ⎧ξ 2 ⎫
1
⎪ ⎪
A 6ξ 6 = ⎢⎢ −1 1 0 ⎥⎥ ⎨ξ1 ⎬
2
⎢⎣ −1 0 1 ⎥⎦ ⎪⎩ξ 7 ⎭⎪
⎛ 2 +1+1+ 2 +1+1
⎜
−1 − 1
⎜
⎜
−1 − 1
1 ⎜
−1 − 1
Aξ=
⎜
2 ⎜
−1 − 1
⎜
0+0
⎜
⎜
0+0
⎝
−1 − 1 −1 − 1 −1 − 1 −1 − 1 0 + 0
1+ 2
0
0
1+ 2
−1
2 +1
0
0
−1
1+ 2
−1
Introducción al Método de los Elementos Finitos
−1
−1
1+1
−1
0+0 ⎞
⎟
−1 ⎟
⎟
⎟
⎟
−1 ⎟
⎟
⎟
1 + 1 ⎠⎟
40
⎧ξ1 ⎫
⎪ξ ⎪
⎪ 2⎪
⎪ξ3 ⎪
⎪ ⎪
⎨ξ 4 ⎬
⎪ξ ⎪
⎪ 5⎪
⎪ξ 6 ⎪
⎪ξ ⎪
⎩ 7⎭
Sistema de ecuaciones global
−1
−1
−1
−1
0
0
⎛4
⎜
0
0
0
0
−0.5
⎜ −1 1.5
⎜ −1 0
1.5
0
0
0
−0.5
⎜
0
1.5
0
−0.5
0
⎜ −1 0
⎜ −1 0
−0.5
0
0
1.5
0
Aξ= ⎜
−0.5 −0.5
0
0
0.5
0
⎜0
⎜ 0 −0.5
0
0
−0.5
0
0.5
⎜
⎜
⎜
⎜
⎜
⎝
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎟
⎠
⎧ξ1 ⎫ ⎧ b1 ⎫
⎪ ⎪ ⎪ ⎪
⎪ξ 2 ⎪ ⎪b2 ⎪
⎪ξ3 ⎪ ⎪b3 ⎪
⎪ ⎪ ⎪ ⎪
⎪ξ 4 ⎪ ⎪b4 ⎪
⎪⎪ξ5 ⎪⎪ ⎪⎪b5 ⎪⎪
⎨ ⎬=⎨ ⎬
⎪ξ 6 ⎪ ⎪b6 ⎪
⎪ξ 7 ⎪ ⎪b7 ⎪
⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪
⎪ ⎪ ⎪ ⎪
⎩⎪ ⎭⎪ ⎩⎪ ⎭⎪
Notar que la ecuación 1 está completa (no hay más elementos que contribuyan allí) :
4ξ1 − ξ 2 − ξ3 − ξ 4 − ξ5 = b1
Puede mostrarse, de manera similar, que:
h2 1
b1 = ( f + f 2 + f 3 + f 4 + f 5 + f 6 )
6
con:
f i = ∫ ψ 1i f dx
i
La ecuación es idéntica a la que se obtiene por diferencias finitas. El término a derecha cambia.
Introducción al Método de los Elementos Finitos
41