PCB RescataMAC/30
Anuncio

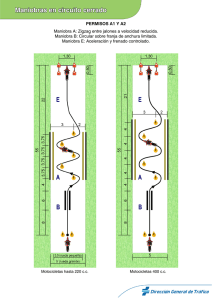
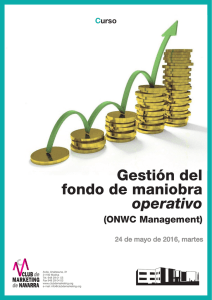
Sistema de Emergencia RescataMAC /30 Manual Técnico v4.00, FEB.04 Español / DTRES30Es Instalación • Montaje • Puesta en Marcha Uso • Mantenimiento • Reparación MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 INDICE GENERAL Capítulo . 1 • PRECAUCIONES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 Capítulo . 2 • CARACTERÍSTICAS GENERALES . . . 2.1 Sistemas de Emergencia, Descripciones 2.2 Diagrama General (Cuadro) . . . . . . . . . 2.3 Serigrafía PCB RESCATAMAC / 30 . . . . 2.4 Descripción de Características . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 4 4 5 6 CAPÍTULO . 3 • CONEXIONES GENERALES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.1 Diagrama de Operaciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.2 Conexionado RescataMAC/30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.3 Conexiones de Fuerza . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.4 Serie de Seguridad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.5 Adaptación cuadro de maniobra (ejemplo) . . . . . . . . . . . . . . . . . . . . . . . . 3.6 Diagrama de Conmutación de Series con RescataMAC/30 Serie de Seguridad 3.7 Conexiones con el Operador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.7.1 Conexiones con el Operador Monofásico . . . . . . . . . . . . . . . . . 3.7.2 Conexiones con el Operador Trifásico . . . . . . . . . . . . . . . . . . . 3.7.3 Conexiones con el Operador 220Vac + Señal de Leva . . . . . . . . 3.8 Conexiones del Freno y la Leva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.9 Conexiones del Elemento Nivelador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3.10 Conexiones con la Botonera de Cabina . . . . . . . . . . . . . . . . . . . . . . . . . . 3.11 Conexiones para Lecturas Digitales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .8 .8 .9 10 11 12 13 14 14 14 15 16 17 18 19 Capítulo . 4 • CONFIGURACIÓN DEL EQUIPO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.1 Configuraciones para el Motor de Operador de Puerta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.2 Tensión de Freno y Leva . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3 Potencia del Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4 Tiempo de Apertura y Cierre de Puertas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.5 Configuración de la Señal de Nivelación : Finalización de la Señal de Recate . . . . . . . . . . . . . . 4.6 Sensor de Lectura de Velocidad del Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.7 Par y Velocidad Durante la Maniobra de Rescate . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.7.1 Reglas Generales Cualitativas al Alterar los Parámetros de Par y Velocidad de Giro . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20 20 21 21 21 21 22 22 22 Capítulo . 5 • COLOCACIÓN DE LAS BATERÍAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 5.1 Proceso . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23 Capítulo . 6 • ACTIVACIÓN Y DESACTIVACIÓN DE LA INSTALACIÓN 6.1 Activación y Desactivación del RescataMAC/30 . . . . . . . . . . 6.2 Activación y Desactivación General de la Instalación . . . . . . 6.3 Desactivaciones para el Test del RescataMAC/30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 24 24 24 Capítulo . 7 • PUESTA EN MARCHA DE LA INSTALACIÓN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 7.1 Activar la Instalación : Funcionamiento Normal . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 7.2 Operación de Emergencia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 Capítulo . 8 • SENSOR DE LECTURA DE VELOCIDAD DE GIRO 8.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8.2 Instalación Física . . . . . . . . . . . . . . . . . . . . . . . . . 8.3 Instalación Eléctrica . . . . . . . . . . . . . . . . . . . . . . . 8.4 Activación del Sensor . . . . . . . . . . . . . . . . . . . . . . 8.5 Lectura de la Velocidad de Giro del Motor . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 26 26 27 27 28 Capítulo . 9 • PARÁMETROS . . . . . . . . 9.1 Método de Parametrización 9.2 Modo RUN . . . . . . . . . . . . 9.3 Modo PROGRAM . . . . . . . . 9.4 Tabla de Parámetros . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 29 29 30 31 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Capítulo . 10 • PRESENTACIÓN DE INFORMACIÓN . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 10.1 Visualización de Códigos Almacenados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 10.2 Información Ofrecida por el RescataMAC 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 Capítulo . 11 • OPERACIONES DE MANTENIMIENTO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 11.1 Plan Preventivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34 PLAN DE ACCIONES PREVENTIVAS RESCATAMAC 30 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35 v4.00, FEB..04 Pag . 2 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 1 • PRECAUCIONES ! ATENCIÓN ! MUY IMPORTANTE 1. TENSIÓN DE RED • 2. DOCUMENTACIÓN • 3. No efectúe operación alguna hasta no haber leído completamente la documentación del equipo. Familiarícese con él para así garantizar una correcta instalación. BATERÍAS • 4. Este equipo ha sido fabricado para una determinada tensión de red. Asegúrese de que coincide con la de su instalación. Las baterías son suministradas en un paquete aparte. Cuando las instale en el equipo, sea especialmente cuidadoso (siga las indicaciones de la documentación). Es imprescindible realizar las Operaciones de Mantenimiento redactadas en este Dossier. NORMATIVAS El equipo atiende a las siguiente normativa : • EN 81-1 (en todos los puntos que le son aplicables) • EN 12015, Emisión Electromagnética • EN 12016, Inmunidad Electromagnética, Excepto con la EN 61000-4-4 en modo de funcionamiento Transitorio (en este modo, en la realidad, no se produce el efecto perturbador que ensaya esta norma). 5. OPERACIÓN • 6. Recuerde que el equipo nunca efectuará una maniobra de rescate cuando algún contacto de seguridad se encuentre abierto. Informe al usuario final. MANTENIMIENTO PREVENTIVO • • Para un correcto funcionamiento del equipo y detectar posibles anomalías en las baterías es necesarios realizar el mantenimiento preventivo indicado en éste manual. Las baterías son elementos de vida “reducida” comparandola con los componentes electrónicos, (según fabricante de 3 a 5 años), es imprescindible efectuar una serie de acciones preventivas que garanticen una fiabilidad total del equipo. Sirva como pequeño resumen del mantenimiento preventivo lo indicado a continuación: no obstante lease detenidamente dicho capítulo del manual y aplique las actuaciones propuestas: a. Compruebe visualmente que las baterías no presentan fugas de material interno por las juntas. b. El sistema tras aproximadamente 2 días sin operar (sin realizar operación de rescate) posee una carga cercana al 100%. En esta situación el sistema efectúa una carga de mantenimiento de baterías que hace oscilar la tensión en el margen “aproximadamente” entre 67.5 y 69 voltios. Compruebe que ambos márgenes se alcanzan con una cierta periocidad. En el supuesto de que no se obtenga esta tensión se ha de medir la tensión de las baterías de forma individual (esta operación se realizara sin quitarlas del equipo y estando este conectado). La tensión individual que ha de ofrecer cada batería ha de estar en el entorno de los 13 a 13.8 y se observará que una o más baterías poseen niveles de tensión inferiores a lo indicado “sustituir esas baterías de forma inmediata”, si estas baterías permanecen conectadas se puede llegar a la destrucción total del equipo. c. La carga de batería toma su alimentación del secundario del transformador TRR, asegurese que dicha alimentación se obtiene de la toma de 60 Vac, en el supuesto en el que se obtenga de la toma de 70 Vac cambiela a la toma de 60 Vac. MACPUARSA ha ido incorporando durante estos años acciones y elementos que permitan minimizar los efectos destructivos producidos por el deterioro de las baterías no obstante la labor de detección y sustitución de baterías tienen que ser realizada por el mantenedor del ascensor, para lo cual además de realizar lo indicado en este punto aplique lo indicado en el capítulo de Operaciones de Mantenimiento. v4.00, FEB..04 Pag . 3 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 2 • CARACTERÍSTICAS GENERALES 2.1 Sistemas de Emergencia, Descripciones • Completo para ascensores eléctricos, que permite el accionamiento de todos los elementos del ascensor en situaciones donde los elementos de control normales dejan de estar operativos, como consecuencia de la ausencia de fluido en la red eléctrica o por cualquier otra causa externa. • Incorpora sistema electrónico de autochequeo permanente con avisador acústico, que hace que el mismo equipo detecte sus propias anomalías, que imposibilitarían el funcionamiento del SISTEMA DE EMERGENCIA cuando fuera necesario ‘baterías descargadas, fusibles fundidos, etc ...’. QIG - 6A QI24 - 6A QI60 - 32A 2.2 Diagrama General (Cuadro) Transformador TRR CEM2 Emergencia 2 CG General CEM1 Emergencia 1 PCB RescataMAC/30 Conectores de Fuerza U V W 12Vdc 6.5 A/h Plomo - Calcio v4.00, FEB..04 12Vdc 6.5 A/h Plomo - Calcio 12Vdc 6.5 A/h Plomo - Calcio Pag . 4 / 37 R S T 12Vdc 6.5 A/h Plomo - Calcio U' V' W' R' S' T' 12Vdc 6.5 A/h Plomo - Calcio DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 2.3 Serigrafía PCB RESCATAMAC / 30 C69 1 1 R109 RL11 RL8 RNIV2 RSS D16 RL12 R102 60 110 220 1 60 110 1 C65 R85 R88 R87 R33 V. OPER 220 220 380 1 Q24 Q22 1 R31 D37 D45 D35 D34 D41 ROP1 ROP2 RL RCNT RL9 RL10 RL7 RL5 RL16 RL6 D9 D20 RL19 R106 D10 RL15 B&C R34 Q21 D8 RL14 1 R30 R27 C64 R37 C7 R84 R32 C27 TLP-521 D25 C60 C36 RL18 1 C66 R36 C63 R35 R38 FCAB F5 MIC1427 D32 R82 U11 C35 R121 C74 D33 R3 R89 R83 C83 C34 R60 D38 C32 R57 C48 R111 C49 B&C C3 R86 R28 C33 C54 D30 MONOFASICO + LEVA C84 R29 R91 R75 U30 TLP-521 D47 ULN2003 RD42 U6 C17 D17 C80 RESDRIVER2 R151 74HC165 R155 U20 Q21 C87 C5 R140 U21 RD44 TR1 D48 DZ2 R153 D43 17 F7 C2 Q23 R145 16 F6 Q20 R149 15 TERMOSTATO C4 D28 74HC165 C22 D23 18 D29 R139 ULN2003 74HC244 R117 C24 R92 U10 TLP-521 R152 R115 R146 R116 R119 R148 U34 R137 D4 C73 C75 C76 R144 R149 Q22 ST90T40 R120 C61 C20 R147 RFEM D27 Q20 74HC244 C51 C85 C78 R13 C58 C19 D26 PR2 C91 C10 U33 U29 C52 C67 C82 13 R79 14 R114 D49 U1 U2 U3 R142 R107 R141 D11 SG3524 C6 D3 + C13 TLP-521 U4 D46 U31 F2 C37 R74 C45 X1 D5 D40 R72 Q19 R11 FMC C11 Q13 C46 C46 1 R134 U32 D21 R138 R150 C62 C77 R68 + C47 R69 R71 C81 DZ1 Q14 1 R136 12 U14 + V4 VR1 D2 C12 C39 DM9368 R112 R70 P2 RL13 Q17 U9 74HC165 C72 R143 R99 D39 11 D18 RL17 1 R25 R42 Q18 1 R126 U19 D19 RL20 RS1 C1 9 1 10 11 2 12 3 13 14 4 15 5 16 17 6 18 7 19 20 8 21 RS2 RF RS3 V10 V12 V8 C3 C5 RNIV1 V7 V11 C86 Q16 R105 D15 RESDRIVER1 RL4 RL1 R132 RL3 V1 FCB R135 R45 R130 R128 F1 RCHOP R1 R56 10 V3 D12 R110 Q12 RMC R113 R124 R47 Q8 R55 RRED D31 R46 RLOG D6 9 PR1 + R2 R40 R24 C26 R122 R44 J1 8 D1 R22 Q4 R43 R81 D24 C59 C40 D36 R23 C16 C57 Q15 7 R133 1 1 1 D22 R18 U26 Q11 6 Q10 1 1 Q7 C71 Q6 R127 5 D7 C79 R19 R118 1 1 U13 AD654 Q3 4 R41 C70 Q2 R125 3 R131 Q9 R39 C68 R20 C14 C56 Q5 R48 2 Q25 Q1 1 RLCB 1 R129 1 R78 P1 V2 R50 B7 1 R123 PL1 C15 R52 B6 1 SW C21 R100 R54 B5 R90 R98 C23 1 D1 1 D2 R101 C25 D3 22 23 C2 24 25 26 27 28 29 30 31 32 33 34 S/N 35 42 36 43 37 44 38 45 39 46 40 47 41 C6 C4 v4.00, FEB..04 Pag . 5 / 37 DTRES30Es V9 MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 2.4 Descripción de Características • Todas las funcionalidades del SISTEMA DE EMERGENCIA en sólo una placa de circuito impreso : PCB RescataMAC 30 totalmente configurable. • Rescatapersonas aplicable a ascensores eléctricos con las siguientes características, los ‘ valores máximos ’ son : • Motor de tracción : 380 Vac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15CV. (como opción bajo pedido hasta 25CV.). 220 Vac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9CV. (como opción bajo pedido hasta 15CV.). • Freno y leva ‘estándar’ : 220 Vdc, 190 Vdc, 180 Vdc . . . . . . . . . . . . . . . . 1.5A. 125 Vdc, 110 Vdc . . . . . . . . . . . . . . . . . . . . . . . 2A. 48 Vdc, 60 Vdc . . . . . . . . . . . . . . . . . . . . . . . . 4A. • Es posible generar otras tensiones para freno y leva ‘bajo demanda’. • Motor del operador de puerta, Monofásico o 415 Vac, 380 Vac . . . . . . . . . . . . . . . . . . 220 Vac . . . . . . . . . . . . . . . . . . . . . . . . 125 Vac, 110 Vac . . . . . . . . . . . . . . . . . . Trifásico : . . . . . 0.75 A. . . . . . 1.4 A. . . . . . 2 A. Es posible accionar el motor del operador de puerta cuando se mueve la cabina, (indiquese exactamente en el pedido). • Incluye sistema electrónico de autochequeo permanente con avisador acústico ‘situado en el mismo equipo’ que permite al propio SISTEMA DE EMERGENCIA detectar su propias anomalías que imposibilitarían la operación de rescate cuando fuese necesario. • Todas la salidas de potencia son cortocircuitables con protección electrónica : la aparición de cualquier cortocircuito no provoca la destrucción de ningún fusible; electrónicamente se detecta, reintentando la operación, almacenando el error para posterior visualización. • Detección de derivaciones a tierra en series de seguridad. • Salida para dos indicadores luminosos para situar en cabina : Fallo en sistema de emergencia. Sistema de emergencia en operación. • Permite la detección de embalamiento en motor mediante la colocación de un sensor de bajo coste ‘por ejemplo : de proximidad inductivo’ orientado hacia cualquier parte metálica que gire simultáneamente con el motor ‘por ejemplo : radios del limitador de velocidad’. • Posibilidad de colocar pulsador en cabina cuya activación inicia la operación de rescate. • La causa habitual que provoca que el SISTEMA realice la operación de emergencia es la ausencia de fluido en la red eléctrica. Sin embargo, el equipo permite, además, conectar hasta 4 contactos libres de tensión externos que informan de otras causas que deben hacer operar el sistema de emergencia. Esto puede ser utilizado para detectar anomalías en los equipos de control de operación normal del ascensor. • Bajo demanda, es posible definir una lógica específica de los estados de los contactos citados que detecte situaciones especiales de entrada en emergencia. • Detección de fallos en el accionamiento del motor de tracción durante la maniobra de emergencia : • cortocircuito. • sobrecarga. • falta de conexión de alguna fase al motor. • desequilibrio de fases. • máximo tiempo de accionamiento del motor ‘protección térmica’. • embalamiento. • bloqueo de giro. • Conexión de hasta 3 grupos de contactos de series de seguridad. Posibilidad de ampliar el número de contactos de seguridad o de limitación de recorrido ‘bajo demanda’. • Efectúa análisis del sentido de giro óptimo del motor ‘mínimo consumo de baterías durante la operación de emergencia’. v4.00, FEB..04 Pag . 6 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 • No es necesario incorporar elemento en hueco con función NIVELADOR si ya existe en la instalación de funcionamiento normal. Puede usarse esa misma señal ya que el SISTEMA DE EMERGENCIA la conmuta junto con la alimentación del equipo, ‘por ejemplo : MAC 523/24 en instalaciones de dos velocidades ’. • Líneas y órganos conmutados por el SISTEMA DE EMERGENCIA : • acometida general. • motor de tracción. • freno. • leva. • motor del operador de puerta. • contactos de series de seguridad, ‘estándar : 3 grupos. Bajo demanda : ilimitado’. • nivelador ‘contacto a nivel y alimentación’. • Otros elementos conectables : • pulsador y dos indicativos luminosos ‘para cabina’. • cuatro contactos libres de tensión. • sensor de lectura de giro del motor. v4.00, FEB..04 Pag . 7 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 CAPÍTULO . 3 • CONEXIONES GENERALES 3.1 Diagrama de Operaciones 1 Stand - By Carga de Baterías Falta alimentación o EM2 activo ? Efectúa operación de movimiento de cabina en sentido favorable NO SI Vuelve la alimentación en 5 seg.? SI NO El ascensor esta a nivel ? NO SI ORDEN ABRIR PUERTAS Durante el movimiento se abre alguna serie? Alcanza nivel de planta? NO AUTOAPAGADO SI NO ORDEN DE CERRAR PUERTAS Se activa PC antes de 2 min. ? NO SI SI SI Parar el movimiento de cabina Las series de seguridad están abiertas? NO SI ORDEN CERRAR PUERTAS Siguen las series abiertas? NO Parar el movimiento de cabina Siguen las series abiertas? NO TEST DE SENTIDO Analiza el consumo del motor en ambos sentidos durante 3 seg. Toma el de sentido favorable el de menor consumo. SI ORDEN ABRIR PUERTAS 1 v4.00, FEB..04 Autoapagado Pag . 8 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 • • • Si la alimentación vuelve después de 5 seg., la operación de rescate se ejecutará completamente y tras finalizar, no se ejecutará el AUTOAPAGADO, sino que se devolverá el control a la maniobra normal y el RESCATAMAC / 30 pasará a STAND-BY. Si durante la operación de emergencia aparece sobrecarga o cortocircuito en alguna salida de energía, se efectuarán 3 intentos; si persiste el fallo se abortará el rescate. Si se encuentra deshabilitada la operación de emergencia ( contacto EM1 activo, o SW1 activo ), el equipo se autoapagará inmediatamente tras desaparecer la alimentación. U' A1 De Acometida Red Salida Trifásica 380/220Vac Acometida a cuadro maniobra De cuadro maniobra A2 A Motor U V' W' T2 T1 CEM2 CG CEM2 A 72 A2 CEM1 81 CG 82 72 72 71 A2 CEM1 A1 71 v4.00, FEB..04 18 17 15 16 14 P2 13 12 11 9 10 8 7 6 5 4 2 3 - P1 PCB RESCATAMAC/30 U V W + 2 I60 32A 1 1 71 A1 CEM2 62 A CG L1 61 CG 62 61 61 CEM1 62 1 2 6A I24 - Entrada V. Rápida Salida Trifásica de cuadro maniobra 380/220Vac T' S' R' W T3 V CEM2 L3 L2 CEM1 T3 T2 T1 L3 L2 L1 + Salida a motor V. Rápida T R 2 CG 0 60Vs 70 Vs T1 L1 T2 L2 T3 L3 TRR 10Vs 10 Vs 0 1 6A IG S 0Vp 110Vp 380Vp 220Vp t t Conectar según tensión de red 3.2 Conexionado RescataMAC/30 Pag . 9 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.3 Conexiones de Fuerza Sin Rescatamac / 30 CUADRO DE MANIOBRA OPERACIÓN NORMAL R S T U V W U1 Conexión Sala de Máquinas Velocidad Rápida R S 3 V1 W1 M Velocidad Lenta T Con Rescatamac / 30 RESCATAMAC / 30 CUADRO DE MANIOBRA CONEXIONES DE FUERZA OPERACIÓN NORMAL R S T U' V' W' U V W R' S' T' R S T t U V W U1 V1 W1 Conexión Sala de Máquinas R S T 3 Velocidad Rápida M Velocidad Lenta Asegúrese de que todas las conexiones de fuerza son correctas. Una conexión errónea puede provocar la destrucción total del equipo 3.3.1 Conexiones Fuerza a) b) Desconecte la acometida de fuerza al cuadro de maniobra normal y conéctela a las bornes RST de RescataMAC 30. Efectúe un puente entre las bornes R’ S’ y T’ de RescataMAC 30 y la entrada de acometida de fuerza del cuadro de maniobra normal. v4.00, FEB..04 Pag . 10 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 c) d) e) Desconecte los cables que alimentan el devanado de velocidad rápida del cuadro de maniobra normal y conéctelos a las bornes U’ V’ y W’ de RescataMAC 30. Efectúe un puente entre la salida que ofrece el cuadro de maniobra para la velocidad rápida del motor y las bornes U, V, W de RescataMAC 30. • Si la instalación es de 1 velocidad, opere con el único devanado que posee el motor. Conecte en el punto adecuado del paquete de fuerza de RescataMAC 30, la tierra. El cable de fuerza deberá ser de 6mm2 y el de tierra de 1.5mm2 3.4 Serie de Seguridad Sin Rescatamac / 30 CUADRO DE MANIOBRA OPERACIÓN NORMAL Serie 1 Serie 2 Serie 3 Cada circuito de series, puede manejar tensiones diferentes. Con Rescatamac / 30 RESCATAMAC/30 CUADRO DE MANIOBRA OPERACIÓN NORMAL CONEXIONES DE FUERZA 26 28 30 32 C4 23 25 27 29 31 33 Serie 1 Serie 2 Serie 3 Serie 1 24 Serie 2 22 Serie 3 C3 • Si la maniobra posee tan solo 1 o 2 grupos de series deben efectuarse los puentes oportunos : • Para 2 grupos de series, puentear 22 con 23. • Para 1 grupo de serie, puentear 26 con 27 y 22 con 23. • Si la maniobra posee más de 3 grupos de series, debe ser solicitado a la hora de efectuar el pedido del equipo al tratarse de una opción. • Si la conexión a la maniobra no es clara, póngase en contacto con MACPUARSA. v4.00, FEB..04 Pag . 11 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.5 Adaptación cuadro de maniobra (ejemplo) Sin Rescatamac / 30 CUADRO DE MANIOBRA OPERACIÓN NORMAL Serie 1 106 Serie 2 104 104 1 103 2 Serie 3 103 LV1 3 Con Rescatamac / 30 PCB RESCATAMAC/30 CUADRO DE MANIOBRA OPERACIÓN NORMAL Serie 1 C3 22 24 26 28 30 32 C4 23 25 27 29 31 33 3 2 1. SERIE 1 SCE . . . . . . . . . . . . . . . . . . serie cerrojos exteriores. SCC . . . . . . . . . . . . . . . . . . serie cerrojos cabina. 2. SERIE 2 SP . . . . . . . . . . . . . . . . . . . serie puertas 3. SERIE 3 LV . . . STOP . AF . . . AC . . . CT . . . FS . . . FI . . . CTL . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . v4.00, FEB..04 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 106 104 Serie 2 Serie 3 104 103 103 LV1 1 limitador velocidad. interruptor emergencia. aflojamiento cables. acuñamiento. contacto trampilla. final carrera superior. final carrera inferior. contacto tensión limitador cables. Pag . 12 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.6 Diagrama de Conmutación de Series con RescataMAC/30 Serie de Seguridad Ascensor en Funcionamiento Normal RS1 24 Serie 1 Inicio de Series 22 Serie 3 RS1 23 RS2 28 Serie 2 26 Serie 2 RS2 27 29 RESCATAMAC 30 Cuadro de Maniobra 25 RS3 32 Serie 3 30 Serie 1 RS3 31 Final de Series 33 Ascensor en Maniobra de Emergencia RS1 24 Serie 1 Inicio de Series 22 Serie 3 23 RS2 28 Serie 2 26 Serie 2 27 29 RESCATAMAC 30 Cuadro de Maniobra 25 RS3 32 Serie 3 30 Serie 1 31 Final de Series 33 RS1, RS2, RS3 . . . . . . . . . . . Relés conmutación de series. La tensión que es manejada en la series durante la operación de rescate es de 110Vac v4.00, FEB..04 Pag . 13 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.7 Conexiones con el Operador 3.7.1 Conexiones con el Operador Monofásico OPERADOR MONOFÁSICO RESCATAMAC 30 CUADRO DE MANIOBRA OPERACIÓN NORMAL CUADRO DE MANIOBRA OPERACIÓN NORMAL C4 M M ~ Común Cerrar M1 M2 M3 Abrir Común Cerrar 42 43 44 45 46 47 Abrir M3 Común M2 Cerrar Abrir M1 Si existe algún otro condensador conectado al motor, es necesario colocarlo entre el cuadro y el RescataMAC/30. 3.7.2 Conexiones con el Operador Trifásico CON RESCATAMAC 30 SIN RESCATAMAC 30 CUADRO DE MANIOBRA OPERACIÓN NORMAL T1 U T2 V 3 CUADRO DE MANIOBRA OPERACIÓN NORMAL T3 W M v4.00, FEB..04 Pag . 14 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.7.3 Conexiones con el Operador 220Vac + Señal de Leva Cuadro de Maniobra Operación Normal Cuadro de Maniobra Operación Normal 0 Vp 0 Vp 220 Vp Activación Leva M3 M2 42 43 (*) 220 Vac LEVA 220 Vac Caja de Control M (*) Activación Leva RESCATAMAC 30 M1 44 45 220 Vp 46 47 M3 M2 M1 (*) 220 Vac LEVA 220 Vac Caja de Control M Se incorpora exclusivamente en operadores de puerta con variación de frecuencia cuando al realizar la apertura de puerta en modo emergencia el RescataMAC/30 detecte cortocircuito. El valor de dicha resistencia es de 4.7 S / 10 W. MUY IMPORTANTE Si se utiliza este operador se quitará del PCB el puente que indica ‘monofásico + leva’, colocado debajo del transformador del circuito impreso v4.00, FEB..04 Pag . 15 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.8 Conexiones del Freno y la Leva Sin Rescatamac / 30 CUADRO DE MANIOBRA OPERACIÓN NORMAL C1 C2 B1 B2 + LEVA FRENO + Con Rescatamac / 30 RESCATAMAC 30 CUADRO DE MANIOBRA OPERACIÓN NORMAL C5 34 35 36 37 38 40 41 C1 C2 11 12 + + + LEVA + FRENO 39 El equipo es suministrado con elementos supresores de picos de tensión, provocados por la conmutación del freno y la leva. En cualquier caso, es recomendable conectar directamente en las bornes de conexión del freno y la leva elementos supresores ‘filtro ‘RC’ y diodo respectivamente’. Esto es especialmente aconsejable en instalaciones con cuadros de maniobra antiguos. v4.00, FEB..04 Pag . 16 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.9 Conexiones del Elemento Nivelador • El equipo requiere la colocación en hueco de algún elemento que le informe que la cabina se encuentra a nivel para así finalizar la maniobra de rescate. • Existe la posibilidad de usar el mismo elemento utilizado por la maniobra de operación normal, a nivel o si se recibe un pulso cuando hemos llegado a nivel. • El equipo suministra 24 Vdc para el elemento que informa que la cabina esta a nivel. • Posteriormente se describe en el Capítulo.3, CONFIGURACIÓN DEL EQUIPO, la posibilidad de trabajar con contacto ( NO ) o ( NC ) en el elemento de nivelación y de incorporar un posible retardo en la parada tras recibir consigna de nivel. si dicho elemento queda conmutado Sin Rescatamac/30 CUADRO DE MANIOBRA OPERACIÓN NORMAL Alimentación Nivelador Fotoeléctrico Entrada Nivelador + Nivelador - + - P.Ej: MAC 523/24 Con RescataMAC/30 / Nivelador Fotoeléctrico CUADRO DE MANIOBRA OPERACIÓN NORMAL PCB RESCATAMAC 30 1 2 3 4 5 6 7 8 Entrada Nivelador Alimentación Nivelador Fotoeléctrico + - Nivelador V1 - 2 = 24Vac + P.Ej: MAC 523/24 v4.00, FEB..04 Pag . 17 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Con RescataMAC/30 / Nivelador Magnético CUADRO DE MANIOBRA OPERACIÓN NORMAL PCB RESCATAMAC 30 Entrada Nivelador Alimentación Nivelador Fotoeléctrico Nivelador 3.10 Conexiones con la Botonera de Cabina Opcionalmente se pueden conectar los siguientes elementos instalados en la botonera de cabina : RESCATAMAC 30 13 14 PC 15 LC1 Max. 4W 24Vdc • Pulsador PC Una vez el equipo se encuentre listo para efectuar una maniobra de rescate, es necesario pulsar ‘PC, abrir circuito en bornes 13 y 14’, para iniciar el movimiento de la cabina. • Señal luminosa LC1 Activa en maniobra de emergencia. Intermitente antes de pulsar ‘PC’, permanente tras pulsar ‘PC’ hasta finalizar la maniobra de rescate, 24 Vdc. • Señal luminosa LC2 Activa intermitente cuando el equipo detecta un error, tanto en ‘stand-by’ como en operación de emergencia, esto permite al usuario informar sobre un fallo en el equipo y así avisar a la empresa encargada del mantenimiento, 24 Vdc. 16 LC2 Max. 4W 24Vdc MUY IMPORTANTE Si no existe pulsador PC, el borne número 14 debe quedar libre v4.00, FEB..04 Pag . 18 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 3.11 Conexiones para Lecturas Digitales Opcionalmente se puede conectar los siguientes contactos libres de tensión que permiten informar al equipo de determinadas situaciones externas : RESCATAMAC 30 17 18 19 EM1 : 20 21 • EM1 EM2 EM3 9 EM2 : La utilización de esta señal es conectar un contacto ‘NO’ del conmutador de revisión, de tal forma que en este modo de trabajo no opere el RescataMAC 30. EM4 MUY IMPORTANTE (*) (*) Contacto normalmente cerrado. Cuando este contacto se abre informa al equipo de que debe anularse cualquier maniobra de rescate. Si existe en curso una maniobra de rescate el ascensor se mueve’, ésta quedará abortada. Si no se conecta contacto en esta entrada, es necesario hacer un puente entre las bornes 17 y 18 Futuras Ampliaciones 10 11 12 13 14 15 16 17 18 19 20 21 C2 Contacto normalmente abierto. El cierre de este contacto informa al equipo que entre en maniobra de emergencia aún sin desaparecer el fluido eléctrico ‘esta última, causa habitual de entrada en emergencia’. El uso habitual de esta entrada es conectar uno o varios contactos en paralelo ‘ normalmente abiertos ’ que se cierran cuando alguna situación anómala en la maniobra principal provoca la parada del ascensor. Caso práctico : alimentar un relé con la tensión de trabajo del cuadro de maniobra normal. Conectar un contacto normalmente cerrado del relé entre las bornes 17 y 19. Cuando la tensión de trabajo desaparezca como consecuencia de un fusible fundido el equipo entrará y efectuará una operación de rescate. MUY IMPORTANTE El equipo entrará en maniobra de rescate cuando EM2 se cierre permanentemente durante un tiempo definido en el parámetro de configuración número 11. Configuración de fábrica 10 segundos EM3, EM4 : Reservado para futuras ampliaciones. v4.00, FEB..04 Pag . 19 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 4 • CONFIGURACIÓN DEL EQUIPO El equipo será configurado en fábrica con las funcionalidades precisas según las haya especificado el cliente. La configuración del equipo se efectúa mediante dos sistemas : a) Colocando en la posición adecuada, los conectores enchufables situados en la zona lateral derecha del PCB RescataMAC 30. Permiten seleccionar la tensión del motor del operador de puerta y la tensión del freno y la leva. b) Parámetros de configuración. Permiten definir el resto de las funcionalidades del equipo. Mediante los microinterruptores, pulsador y display se pueden ajustar los parámetros al valor adecuado. MUY IMPORTANTE Cuando el motor del operador de puerta se gobierne con caja de control ‘220 Vac + señal de leva’, es necesario eliminar un puente colocado debajo del transformador de PCB RescataMAC 30 4.1 Configuraciones para el Motor de Operador de Puerta a) Coloque el puente en la posición adecuada en función a la tensión del operador. Posición superior . . . . . . . . . . . . . . . . . . . . motor 110 Vac ‘monofásico o trifásico’. Posición inferior . . . . . . . . . . . . . . . . . . . . . motor 220 Vac o 380 Vac ‘monofásico o trifásico’. V.OPER V.OPER 110 Vac 110 Vac 220 Vac 380 Vac 220 Vac 380 Vac 110Vac Monofásico o Trifásico b) Ajuste del parámetro ( 00 ). Tipo de Motor (*) Corriente Alterna 110Vac o 220Vac Corriente Alterna 380Vac B C VALOR c) Ajuste del parámetro ( 10 ). Control Motor (*) VALOR d) 220Vac ó 380Vac Monofásico o Trifásico Trifásico Monofásico 220Vac + Señal de Leva 220Vac A B C Ajuste del parámetro ( 13 ). Accionamiento Durante el Rescate VALOR (*) NO SI A B El parámetro (13) solo debe tener valor “B”, si el cuadro RESCATAMAC/30 esta preparado para dicha función (*) Operador de Puerta. v4.00, FEB..04 Pag . 20 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 4.2 Tensión de Freno y Leva a) Coloque los puentes en la posición adecuada en función a la tensión de freno y leva. B&C B&C B&C 60 Vdc 60 Vdc 110 Vdc 220 Vdc 110 Vdc 220 Vdc 48 Vdc o 60 Vdc B&C B&C 60 Vdc 60 Vdc 60 Vdc 60 Vdc 110 Vdc 220 Vdc 110 Vdc B&C 110 Vdc 220 Vdc 110 Vdc 220 Vdc 220 Vdc 110 Vdc o 125 Vdc 190 Vdc o 220 Vdc 4.3 Potencia del Motor a) Ajuste del parámetro ( 01 ). Motor Potencia/Tensión 5CV - 380Vac 7.5CV - 380Vac 4.5CV - 220Vac 10CV - 380Vac 6CV - 220Vac 15CV - 380Vac 9CV - 220Vac Valor A B C D 4.4 Tiempo de Apertura y Cierre de Puertas a) Ajuste del parámetro ( 03 ). Permite definir el tiempo que el RESCATAMAC/30 dará orden de abrir o cerrar puertas durante la maniobra de rescate : • valor A : 5 segundos • valor B : 7 segundos • valor C : 10 segundos • valor D : 15 segundos 4.5 Configuración de la Señal de Nivelación : Finalización de la Señal de Recate Se configurarán dos aspectos relacionados con la señal que informa al equipo cuando finaliza la operación de rescate ‘señal NIVELACIÓN’. a) Tipo de contacto del nivelador, actúe en el parámetro ‘02’ de tal forma que : • • b) Valor A . . . . cuando el ascensor alcanza el nivel el contacto está abierto, ‘abierto a nivel, cerrado fuera de nivel’. Valor B . . . . cuando el ascensor alcanza el nivel el contacto está cerrado, ‘cerrado a nivel, abierto fuera de nivel’. Retardo a la parada. Es posible incorporar un retardo desde que se recibe la señal de cabina a nivel y la parada física de la cabina, actúe en el parámetro ‘04’ : • • • • Valor Valor Valor Valor A .. B ... C .. D .. . . . . sin retardo. retardo de 0,5 segundos. retardo de 1,0 segundo. retardo de 2,5 segundos. Esto puede compensar los deslizamientos mecánicos que existen en la parada normal, que serán superiores a los existentes en maniobra de rescate. v4.00, FEB..04 Pag . 21 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 4.6 Sensor de Lectura de Velocidad del Motor La instalación de este sensor permite detectar embalamiento o bloqueo durante la maniobra de rescate. Operar sobre el parámetro ‘05’ : Valor A Valor B .... .... Sensor no instalado. Sensor instalado. 4.7 Par y Velocidad Durante la Maniobra de Rescate MUY IMPORTANTE No es aconsejable alterar los valores de estos parámetros si no posee cierto conocimiento electrotécnico en relación a motores eléctricos. Un ajuste incorrecto puede provocar altos consumos en baterías innecesarios o en oposición, no movilidad de la cabina durante la maniobra de rescate. El equipo es ajustado en fábrica para ofrecer un par y velocidad de giro de motor durante la operación de rescate adecuados. Si existiesen problemas durante la puesta a punto consultar a MACPUARSA. El par se Valor A Valor B Valor C ajusta .... .... .... La velocidad de Valor A . . . . Valor B . . . . Valor C . . . . Valor D . . . . con el parámetro ‘07’ : Bajo Medio Máximo giro se ajusta con el parámetro ‘08’ : 4 Hz 5 Hz 6 Hz 7 Hz Ajuste de fábrica : Par medio, ‘6 Hz’. 4.7.1 Reglas Generales Cualitativas al Alterar los Parámetros de Par y Velocidad de Giro Reglas generales cualitativas al alterar los parámetros de par y velocidad de giro : Para una frecuencia fija de motor, un aumento de par provoca un consumo mayor de las baterías y por otra parte asegura en mayor medida el movimiento de la cabina durante la maniobra de rescate. Una reducción de par provoca efectos inversos. Para un valor fijo en parámetro ‘ 07, ajuste de par ’ una disminución de la frecuencia de giro provoca un aumento muy considerable del consumo de baterías, una operación de rescate de mayor duración en tiempo y por otra asegura en mayor medida el movimiento de la cabina durante la maniobra de rescate. Un aumento de la frecuencia provoca efectos inversos. v4.00, FEB..04 Pag . 22 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 5 • COLOCACIÓN DE LAS BATERÍAS MUY IMPORTANTE En el proceso de la colocación de las baterías es muy importante que ningún elemento metálico toque eventualmente las bornes de las mismas, incluso los terminales Faston, ya que éstos, en contacto con puntos inadecuados, pueden provocar cortocircuitos graves. Sea especialmente cuidadoso en esta operación UNA INCORRECTA CONEXIÓN DE LAS BATERÍAS PUEDE PROVOCAR IRREMEDIABLES DAÑOS EN EL EQUIPO Y CORTOCIRCUITOS GRAVES CON RIESGO DE INCENDIO 5.1 Proceso 1) Tome las 5 baterías de 12Vdc, 6,5A/h suministradas en un paquete externo al cuadro RescataMAC/30. 2) Sitúe las baterías en la zona inferior del cuadro RescataMAC 30 orientadas de tal forma que las bornes de las baterías queden en la parte más hacia afuera del armario. No corte las presillas que unen los terminales de conexión a las baterías hasta no haberlas situado todas ellas en la posición correcta. 3) Podrá comprobar que existen presilladas 5 parejas de cables en cuyo extremo hay terminales tipo Faston para conectar a las baterías. Par a par despresillelos y conéctelos a las baterías, haciendo coincidir la señalización de terminal Faston y terminal de batería. Nunca despresille un par hasta que el anterior no se encuentre conectado a su batería correspondiente. v4.00, FEB..04 Pag . 23 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 6 • ACTIVACIÓN Y DESACTIVACIÓN DE LA INSTALACIÓN 6.1 Activación y Desactivación del RescataMAC/30 El equipo posee tres interruptores magnetotérmicos que deben ser operados rigurosamente, excepto en los casos que se cite lo contrario, en el siguiente orden : ACTIVACIÓN del RescataMAC 30, actúe en la siguiente secuencia : IG Î I24 Î I60 DESACTIVACIÓN del RescataMAC 30, desactive en la siguiente secuencia : I60 Î I24 Î IG No haga esperas, entre actuación de un magnetotérmico y el siguiente. 6.2 Activación y Desactivación General de la Instalación La instalación poseerá 3 puntos de conmutación de alimentación : • Caja general de protección de acometida. • Cuadro de maniobra normal. • RescataMAC 30. Para evitar situaciones no deseadas de funcionamiento de la instalación, siga los siguientes pasos cuando desee activar o desactivar la instalación en general para operaciones de mantenimiento. Activación general de la instalación, actúe en la siguiente secuencia : • Caja general de acometida. • Cuadro de maniobra. • RescataMAC 30. Desactivación de la instalación, desactive en la siguiente secuencia : • RescataMAC 30. • Cuadro de maniobra. • Caja general de acometida. 6.3 Desactivaciones para el Test del RescataMAC/30 Cuando desee efectuar un test del equipo ‘diríjase al apartado de operaciones de mantenimiento’, deberá operar del siguiente modo. Entrada de emergencia por falta de suministro eléctrico. Desactive la caja general de acometida, posteriormente el equipo efectuará la maniobra de rescate; cuando haya finalizado, active de nuevo la caja general de acometida. Entrada de emergencia por fallo en maniobra normal. Si se hace uso de la entrada EM2, para detección de falta de tensión de trabajo en la maniobra normal ‘por ejemplo’, desactive esta última y el equipo ejecutará la maniobra de emergencia. v4.00, FEB..04 Pag . 24 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 7 • PUESTA EN MARCHA DE LA INSTALACIÓN Siga los siguientes pasos para la primera puesta en marcha de la instalación tras haber instalado el RescataMAC/30. RECUERDE En el capítulo 5 se describe en detalle como debe operarse sobre los diferentes elementos de conmutación de la sala de máquinas. Lea detenidamente dicho capítulo antes de seguir con la puesta en marcha. 7.1 Activar la Instalación : Funcionamiento Normal Es aconsejable realizar todas estas operaciones, con el ascensor a nivel de planta. Si el vigilador de fases informa secuencia incorrecta, desactive la instalación, intercambie los conductores de fuerza de las bornes R y S del RescataMAC 30 y active de nuevo. Si el motor en la primera maniobra comienza a girar en sentido inverso al correcto, desactive el RescataMAC 30 ‘parará inmediatamente el ascensor’, corte la acometida general e intercambie los conductores de las bornes U y V del RescataMAC 30. Active de nuevo la instalación. Si el motor del operador de puertas de cabina opera en sentido inverso ‘motores trifásicos’, en funcionamiento normal, desactive la instalación, intercambie los conductores conectados las bornes 42 y 43 del RescataMAC 30 y active de nuevo la instalación. Si el RescataMAC 30 presenta algún error o fallo, diríjase al cuadro INFORMACIÓN OFRECIDA por el RescataMAC 30. En condiciones correcta de funcionamiento, al activar la instalación, el RescataMAC 30 presentará en el display durante unos segundos el número de versión software y posteriormente emitirá un sonido informando que se encuentra en condiciones de funcionamiento correcto; en display aparecerá permanentemente la tensión de las baterías. Si la tensión de las baterías se presenta de forma parpadeante diríjase al ‘ Capítulo. 8 SENSOR DE LECTURA DE VELOCIDAD DE GIRO ‘. 7.2 Operación de Emergencia Desactive la acometida general. El equipo entrará en maniobra de emergencia, informando de ello con un sonido corto repetitivo y activando del mismo modo la señal LC1 de cabina, si existe. Si el equipo detecta que la cabina se encuentra a nivel, únicamente abrirá puertas y finalizará la maniobra de emergencia. Si las puertas tienden a cerrarse ‘motor de operador trifásico’ será necesario intercambiar el conductor que llega a la borne 42 por el de la 43 y el de la borne 45 por el de la 46. Si la cabina se encuentra fuera de nivel, se esperará a que se pulse el botón de cabina PC, que informará sobre el inicio físico de la maniobra de rescate. Si transcurridos 2 minutos, el pulsador PC no es accionado, se iniciará de forma automática el proceso de rescate, ‘en este caso solo efectuará la apertura de puertas, sin mover la cabina’. Si no existe pulsador PC en botonera de cabina, es necesario dejar libre la borne 14. Durante la maniobra de rescate el luminoso LC1 permanecerá permanentemente activo hasta finalizar el proceso. La primera acción ‘antes de iniciar el movimiento de la cabina’ será analizar el estado de las series de seguridad. Si se encuentra abierta en algún punto, se dará orden de cerrar puertas de cabina. Se testearán de nuevo las series, si continúan abiertas se genera el error F11, abortando y finalizando la maniobra de rescate. Si las series se encuentran cerradas, se abrirá freno y durante aproximadamente 3 segundos se intentará mover la cabina en ambos sentidos. Posteriormente se seleccionará como sentido de movimiento de rescate aquel que en el test haya provocado menor consumo energético ‘que coincidirá con el sentido del movimiento más favorable’. Durante el test es muy probable que en alguno de los dos sentidos no llegue a existir movimiento ‘sentido más desfavorable’. El movimiento de la cabina se realizará hasta alcanzar el nivel próximo, momento en el que se parará y se abrirán puertas. Si las puertas tienden a cerrarse en vez de abrirse ‘motor operador trifásico ‘, intercambiar el conductor que llega a la borne 42 por el de la 43 y el de la borne 45 por el de la 46, en el RescataMAC 30. Cualquier incidencia que haga no ejecutar el proceso de rescate en la forma aquí descrita se podrá intentar analizar bien visualizando un posible código de error en el display del PCB, o deduciendo que error existe; por ejemplo, si partiendo de la cabina fuera de nivel, si no efectúa movimiento y tan sólo abre puertas es posible que las conexiones del elemento nivelador sean incorrectas, ‘entendiendo el RescataMAC, que el ascensor ya se encuentra a nivel’. v4.00, FEB..04 Pag . 25 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 8 • SENSOR DE LECTURA DE VELOCIDAD DE GIRO 8.1 Objetivo El objetivo de instalar el sensor de lectura de velocidad de giro, es poder analizar durante la maniobra de emergencia dos posibles situaciones anómalas de funcionamiento : • Embalamiento, debido a un exceso de peso en la cabina. • Bloqueo de la cabina, puede no existir movimiento alguno en la cabina, p. ejemplo, por un problema mecánico o por energía transferida insuficiente ( baterías bajas ). • Cuando se detecte alguna de estas situaciones se abortará la operación de rescate y se generará el siguiente error : Embalamiento : . . . . F24 Bloqueo : . . . . . . . . F23 8.2 Instalación Física El kit sensor estará compuesto por : • • • • Sensor OMRON E2EG - X10MC1 ( o equivalente ). Perfil metálico para fijación del sensor. Tornillería. Manguera de 15 metros para conexión del sensor. Haciendo uso del perfil metálico situé el sensor enfrentando la cabeza plana plástica a los radios de alguna polea en la instalación. La distancia óptima entre el paso de los radios y la cabeza plana es de 5 mm. No use poleas de más de 7 radios ; el diámetro de la misma debe estar entre 250 mm y 750 mm. IMPORTANTE Intente, si es posible, no utilizar la polea tractora de la máquina ya que, en el caso de deslizamiento de cables no se detectará el bloqueo de la cabina (la polea gira y la cabina no se mueve). En cualquier caso, el equipo posee otros sistemas de seguridad que detectarían esta situación (máximo tiempo de operación del motor). v4.00, FEB..04 Pag . 26 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 8.3 Instalación Eléctrica Rescata MAC 30 10 11 12 Azul Negro Marrón 9 E2EG - X10MC1 o (equivalente) RescataMAC 30 11 SENSOR E2EG - X10MC1 o (equivalente) 12 Azul 10 Negro Marrón 9 MANGUERA ( 3 x 0.75 ) 15 mt. CONECTORES ENCHUFABLES M-4 H-4 8.4 Activación del Sensor Para poder hacer uso del sensor es necesario ajustar de forma adecuada el parámetro de configuración ‘05’ : Valor A Valor B .... .... No existe instalado. Si existe instalado. Cuando se instala el sensor, se podrá comprobar que la primera vez que se active el equipo, la representación en display de la tensión de las baterías aparece de forma parpadeante. Esto nos indica que el equipo necesita leer la velocidad nominal del motor para así deducir la velocidad de giro del motor en la maniobra de rescate; así se podrán detectar situaciones de embalamiento o bloqueo en la maniobra de rescate. v4.00, FEB..04 Pag . 27 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 8.5 Lectura de la Velocidad de Giro del Motor Estando en modo de trabajo normal el ascensor, ‘con el RescataMAC 30 en representación de la tensión de baterías’, colocar el microinterruptor nº 2 del banco de switches en posición ‘ON . sentido hacia arriba’. Esto permite poder leer la velocidad de giro. A continuación haga mover el ascensor a velocidad rápida y pulse el botón del PCB RescataMAC 30 ‘esquina superior izquierda’ durante unos 5 segundos. Asegúrese de que el motor opera en velocidad rápida mientras pulsa el botón. Esta operación podrá hacerla tantas veces como desee, si en un primer intento pulso cuando el ascensor circulaba en velocidad lenta. Siempre se almacenará la última lectura que se haya efectuado. Cuando suelte el botón ya se habrá leído la velocidad nominal del motor. Haga la medida, preferiblemente, con la cabina vacía, circulando en sentido subida. Con idea de confirmar que la lectura es correcta compruebe los siguientes aspectos : • Mientras se está pulsando el botón es el mismo momento en el que el sensor opera, de tal forma que cada vez que se enfrente a un radio se activará su señal luminosa, activándose simultáneamente los 3 puntos de los dígitos del display de RescataMAC 30 ‘como información de que el microprocesador recibe los pulsos procedentes del sensor’. • Cuando el botón se suelta es el momento en el que el microprocesador calcula la velocidad de giro del motor, presentando durante algunos segundos realmente el tiempo expresado en centésimas de segundo entre radio y radio enfrentado con el sensor. Con idea de comprobar que la lectura es correcta efectúe este cálculo y compárelo con la cifra que se representa. t = ( 3.14 * D ) / ( N - 1 ) * V D N V ..... ..... ..... Diámetro de la polea en centímetros. Nº de radios. Velocidad normal de la cabina. Por ejemplo : V D N ..... ..... ..... 1 m/s. 34 cm. 5 radios. t = ( 3.14 * 34 ) / ( 5 - 1 ) * V ; t = 26.7 La lectura que debemos obtener debe estar cercana al valor calculado ‘entre 24 y 30, ± 10%’. RECUERDE La lectura la podrá efectuar siempre que lo desee ‘aún ya existiendo una lectura previa, que será sustituida por una nueva’. • Cada vez que finalice de registrar la velocidad normal de giro del motor, coloque de nuevo el microinterruptor nº 2 en posición OFF, ‘hacia abajo’, así evitará lecturas no deseadas si alguien pulsa eventualmente el botón. • Esta información es almacenada en memoria no volátil, por lo que la desactivación del equipo no provoca la perdida de la lectura. v4.00, FEB..04 Pag . 28 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 9 • PARÁMETROS El ajuste de parámetros en el equipo se realiza operando sobre el banco de microswitches ‘SW’ y el pulsador situados en la zona superior izquierda del RescataMAC 30. Junto a ellos, el display de 3 dígitos permitirá visualizar el valor del parámetro deseado. BANCO DE MicroSWITCHES El microinterruptor nº 1 ‘el situado más a la izquierda’ permite definir los 2 modos básicos del funcionamiento : Modo RUN. Banco de [ SW.1 ] 1 2 3 4 5 Modo PROGRAM. Banco de [ SW.1 ] 6 7 1 8 2 3 4 5 6 7 8 ON OFF ON OFF MicroINTERRUPTOR ( 1 ) EN POSICIÓN (OFF) Modo de funcionamiento normal del ascensor MicroINTERRUPTOR ( 1 ) EN POSICIÓN (ON) Modo de funcionamiento de introducción de parámetros de configuración. 9.1 Método de Parametrización Método general : • Desactivar el equipo y ver el parámetro que deseamos modificar. En modo RUN podremos efectuar operaciones especiales que posteriormente se citan. En modo PROGRAM podremos modificar parámetros de ajuste de funcionalidad. • Para modificar un parámetro en modo PROGRAM, colocar el microinterruptor nº 1 en posición ‘ON’ y activar el equipo. Una vez modificados los parámetros, desactivar de nuevo el equipo, se colocará el modo RUN y activaremos de nuevo. 9.2 Modo RUN • Estando el equipo desactivado hay que colocar el microinterruptor nº 1 en posición ‘OFF’ y a continuación activar. Este arrancará y entrará en modo de trabajo normal : espera a entrar en emergencia ‘stand - by ‘. • En esta situación es posible alterar algunos microinterruptores que permiten efectuar operaciones especiales : • Lectura de velocidad de giro del motor ‘microinterruptor nº 2’. 1 2 3 4 5 6 7 8 ON OFF Activa la función LECTURA DE VELOCIDAD de giro motor Modo RUN • Inhibición de entrada de emergencia ‘microinterruptor nº 3’. 1 2 3 4 5 6 7 8 ON OFF Modo RUN Inhibe la posible entrada en emergencia del equipo Colocando el microinterruptor nº 3 en posición ‘ON’ es posible anular la entrada en emergencia del equipo. Es decir, en esta situación si v4.00, FEB..04 Pag . 29 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 desaparece la tensión en la red eléctrica el equipo no ejecutará la maniobra de rescate, autoapagándose de forma inmediata. Comprobará que esta situación se encuentra activa visualizando el display que presentará ‘EA’ y un aviso acústico breve se efectuará cada 2 minutos. Vea que la funcionalidad es exactamente igual a la ofrecida por la entrada EM1. MUY IMPORTANTE Antes de abandonar la sala de máquinas vuelva a colocar el microinterruptor nº 3 en posición ‘OFF’. Recuerde que si lo deja en posición ‘ON’, el equipo nunca entrará en maniobra de emergencia Mantenga el resto de los interruptores ‘desde el 4º hasta 8º en posición ‘OFF’. 9.3 Modo PROGRAM Estando desactivado el equipo colocar el microinterruptor nº 1 en posición ‘ON’ y a continuación activar. Al arrancar entrará en modo de programación de parámetros. El equipo si es solicitado dando las características de la instalación, se suministrará con los parámetros ajustados en los valores adecuados en fábrica, por lo que normalmente no será necesario realizar ajuste alguno. Modificación de Parámetros Se hará uso de : • Banco de switches ‘SW’. • Pulsador ‘PL1’. • Display de 3 dígitos. Se encuentran situados en la esquina superior izquierda del RescataMAC 30. BANCO ‘ SW ’ Microinterruptor Microinterruptor Microinterruptor . nº 1 . . . . . . . . . . . . . . . siempre colocado en ‘ ON ‘ modo PROGRAM’. . nº 2 - 3 - 4 - 5 - 6 . . . . . define en binario el nº del parámetro. . nº 7 - 8 . . . . . . . . . . . . define el nuevo valor del parámetro seleccionado. ON PULSADOR ‘PL1’ Una vez seleccionado el nº del parámetro y su nuevo valor, al pulsar el botón quedará grabado en el PCB RescataMAC 30. SW.1 OFF 1 2 3 4 5 6 7 8 En posición (ON) define modo PROGRAM Define en binario el nº de parámetro : ON OFF ON OFF ON OFF ON OFF Parámetro (0) 2 3 4 5 6 Parámetro (1) 2 3 4 5 6 Parámetro (2) 2 3 4 5 6 Define el nuevo valor del parámetro seleccionado : ON OFF ON OFF ON OFF ON OFF Parámetro (31) Valor (A) DISPLAY EN 3 DÍGITOS En el modo PROGRAM el dígito de la izquierda y el central presentan el nº de parámetro actualmente seleccionado. El dígito de la derecha presenta el valor de dicho parámetro que se encuentra grabado. Es decir, hasta que no se coloque el nuevo valor y se pulse el botón ‘PL1’, no aparecerá en el dígito ya que es al pulsar cuando se graba el nuevo valor. 7 8 Valor (B) 7 8 Valor (C) 7 8 Valor (D) 7 8 Parámetro seleccionado. Posibles valores : ( 00 ) ( 01 ) ... ( 31 ) 2 3 4 5 6 v4.00, FEB..04 Pag . 30 / 37 Valor actual del parámetro seleccionado. Posibles valores : (A)(B)(C)(D) DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 9.4 Tabla de Parámetros (EL PARÁMETRO (13) SOLO DEBE TENER EN EL VALOR ‘ B ‘ (SI), SI EL CUADRO RESCATAMAC/30 ESTA PREPARADO PARA DICHA FUNCIONALIDAD) PARÁMETROS VALOR 7 8 Nº Visualizado Micro INTERRUPTORES 7 8 ON OFF TIPO MOTOR DE OPERADOR DE PUERTA 1 2 3 4 5 6 ON OFF POTENCIA MOTOR (CV) ON OFF CORRIENTE ALTERNA 110Vac-220Vac CORRIENTE ALTERNA 380Vac RESERVADO A OPERADORES ESPECIALES 220Vac - 4.5 6 9 380Vac 5 7.5 10 15 ABIERTO EN PLANTA CERRADO EN PLANTA - - 5 7 10 15 1 2 3 4 5 6 ON OFF 7 8 ON OFF FUNCIÓN 1 2 3 4 5 6 ON OFF 7 8 ON OFF FUNCIONAMIENTO DEL NIVELADOR 1 2 3 4 5 6 ON OFF TIEMPO DE APERTURA Y CIERRE DE PUERTAS ‘ Seg. ’ ON OFF RETARDO EN LA PARADA DESPUÉS DE NIVELAR ‘ Seg. ’ SIN RETARDO 0.5 1 2.5 ON OFF EXISTE SENSOR LECTURA VELOCIDAD NO SI - - ON OFF MÁXIMO TIEMPO OPERACIÓN DEL MOTOR ‘ TÉRMICO ’ Seg. 40 55 70 RESERVADO A VERSIONES ESPECIALES ON OFF NIVEL DE PAR MOTOR ‘ CONSUMO ’ BAJO MEDIO MÁXIMO - 5Hz 6Hz 7Hz 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 ON OFF FRECUENCIA DE TRABAJO PARA EL MOTOR EN EMERGENCIA 4Hz ON OFF SECUENCIA CONTACTOS EM3 - EM4 DETECCIÓN CONTACTOR PEGADO ON OFF CONTROL MOTOR DE OPERADOR DE PUERTA TRIFÁSICO MONOFÁSICO 220Vac+Señal de leva 220Vac RESERVADO A VERSIONES ESPECIALES ON OFF TIEMPO DE ACTIVACIÓN EM2 PARA EFECTUAR RESCATE ‘ Seg. ’ 1 5 10 25 ON OFF DEVOLUCIÓN DE CONTROL A LA MANIOBRA TRAS RESCATE POR EM2 ‘ ACTIVO ’ NO SI ON OFF ACCIONAMIENTO DE PUERTAS DURANTE EL RESCATE NO SI 1 2 3 4 5 6 RESERVADO A VERSIONES ESPECIALES 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 1 2 3 4 5 6 v4.00, FEB..04 Pag . 31 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 10 • PRESENTACIÓN DE INFORMACIÓN La presentación de información se efectúa en el display de 3 dígitos situado en la placa de circuito impreso RescataMAC 30. Al activar se presenta la versión software y posteriormente el último código almacenado. Permanentemente se presenta la tensión de las baterías. Si parpadea indica que está pendiente la lectura de velocidad de giro normal del motor. Si se activa alguna entrada especial o se inhibe la operación con el microinterruptor nº 3 en posición ‘ON’, se representará en el primer dígito una ‘E’, quedando los 2 restantes para informar exactamente el elemento activo. Si en algún momento acontece alguna anomalía o error ‘caracterizado en display por presentar una ‘F’ en primer dígito’ aparecerá representado permanentemente hasta eliminar la causa y quedará almacenado en memoria no volátil. Tras finalizar una maniobra de emergencia se almacenará en el 1er dígito una ‘E’ y en los 2 siguientes el tiempo en segundos que invirtió el sistema en efectuar la maniobra de rescate. 10.1 Visualización de Códigos Almacenados En hojas posteriores se describen todos los posibles códigos que puede generar y almacenar el equipo. Se almacenarán hasta los 64 últimos códigos generados, perdiendo los más antiguos cuando se llegan a generar más de dicha cifra. Al activar el equipo se presentará el nº de la versión software, y posteriormente durante algunos segundos el último código que se almacenó. Posteriormente se visualizará la tensión de baterías. Para visualizar códigos almacenados en el pasado, basta con pulsar el botón para ir haciéndolos aparecer desde el más moderno al más antiguo. Se presentan durante 5 seg. Si en dicho intervalo se pulsa el botón de nuevo se visualizará el siguiente ‘el previo almacenado en el tiempo’. Si no se pulsa tras los 5 seg. se retornará a la representación de la tensión de baterías. 10.2 Información Ofrecida por el RescataMAC 30 INFORMACIÓN EN EL DISPLAY SIGNIFICADO ACCIÓN • Información numérica de la tensión de baterías, estado parpadeante. • Información numérica de la tensión de baterías. • El equipo informa sobre la necesidad de leer la velocidad normal de giro del motor. E1 • Activada inhibición de entrada en emergencia por contacto externo EM1. • Conexiones lecturas digitales. E2 • Activada entrada en emergencia por contacto externo EM2. • Conexiones lecturas digitales. E3 • Activada entrada en emergencia por secuencia de disparo en contactos EM3 y EM4. • Solo en versiones especiales. EA • Activada inhibición de entrada en emergencia por microinterruptores ‘ Nº 3 en posición ON ‘. • Modo RUN. Exy • Maniobra de rescate ejecutada de forma completa sin incidencia alguna. xy : valor numérico del tiempo en segundos que duro la maniobra de rescate. XY.Z • Interruptor magnetotérmico I60 ‘ alimentación de +60 bat ‘ no activo. • Fusible FCB ‘ circuito carga de baterías ’, fundido ‘ 2 Amp ’. F01 o F02 • Desactive el equipo en la secuencia correcta. Sustituya el fusible fundido por uno nuevo ‘ 2 Amp. ’. Active el equipo en la secuencia correcta. Si funde de nuevo el fusible reemplace la placa de circuito impreso por una nueva. • Interruptor magnetotérmico I24, ' alimentación de +24 bat ’, no activo. F03 • Desactive y active el equipo ‘ en las secuencias correctas ’. Si salta repetidamente reemplace la placa de circuito impreso por una nueva. NOTA : Este error puede generarse hasta 3 minutos después de aparecer el fallo. • Desactive el equipo en la secuencia correcta. Compruebe que todas las conexiones de paquete ‘C1 y C2’ son correctas. Active el equipo en la secuencia correcta. Si aparece de nuevo el error sustituya la placa de circuito impreso. • Compruebe el buen estado de los fusibles FCAB, ‘3A’. • Fusible FMC ‘alimentador microprocesador’ fundido, ‘1 Amp’. F04 F05 NOTA : Cuando aparezca el fallo, se efectúa primeramente una maniobra de emergencia y posteriormente presentará el error. • El equipo efectuó la maniobra de rescate por causas externas ‘ entradas EM2, EM3 y EM4 ’. • Alguna causa externa forzó la maniobra de rescate en el equipo. Localice y haga desaparecer dicha causa. • Contactor general ‘CG’ pegado. • Esta situación es detectada cuando se inicia una maniobra de rescate, ya que es necesario desactivar el contactor ‘ CG ’. Compruebe que efectivamente el contactor presenta dicha anomalía y sustitúyalo. • Error en el circuito cargador de baterías. • Compruebe el estado del relé ‘RLCB’. F06 F07 • Desactive el equipo en la secuencia correcta. Sustituya el fusible fundido por uno nuevo ‘1A’. Active el equipo en la secuencia correcta. Si se vuelve a fundir, sustituya la placa de circuito impreso. v4.00, FEB..04 Pag . 32 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 INFORMACIÓN EN EL DISPLAY F08 F09 SIGNIFICADO ACCIÓN • Posibles causas : Fallo en contactor general ‘CG’. Magnetotérmico general ‘IG’ no activo. Fallo en transformador. Fallo en contactores de emergencia, ‘CEM1 y/o CEM2’. • Revisar cada elemento que puede ser causa del error. Sustituir si procede. • Fallo de contactores de emergencia ‘CEM1 y/o CEM2’. • Una maniobra de rescate fue abortada por tensión en baterías demasiado baja ‘< 45 V.’. • Compruebe si las baterías se encontraban descargadas por repetitivas y frecuentes maniobras de rescate o por degradación. Para ello haga cargar las baterías durante 2 días y compruebe posteriormente, haciendo una maniobra de rescate, si poseen un comportamiento correcto. • Una maniobra de rescate no pudo efectuarse debido a un contacto de seguridad abierto, ‘serie abierta en paquete C3/C4‘. • Una maniobra de rescate no pudo efectuarse debido a un contacto de seguridad abierto, ‘serie abierta en paquete C3/C4‘. • No se pudo realizar maniobra de Rescate debido a configuración errónea del Parámetro 13. F12 Una maniobra de rescate no pudo efectuarse por : • Ampliación de series abierta. • Problema en contactores de emergencia, ‘CEM1, CEM2’. • Problema en el contactor general. • Identificar el elemento que no permitió efectuar la maniobra de rescate. Sustituir el elemento si procede. F13 • Maniobra de rescate no ejecutada por no activación de pulsador de cabina ‘PC: Inicio de rescate’ solo se abrieron puertas. • Conexiones botonera cabina. F14 • Maniobra de rescate abortada por aparición de nuevo de tensión en red eléctrica. La tensión de red desapareció menos de 5 seg. F10 F11 F15 • Detectado cortocircuito en la salida del motor de tracción. • Chequear las conexiones al motor y el bobinado del motor. • Detectado cortocircuito en la salida a la leva o el freno. • • • • Comprobar las conexiones a la leva. Chequear la bobina de la leva. Comprobar las conexiones del freno. Chequear bobinas de freno. • Derivación de algún punto de series de seguridad a tierra. • Bobina en corto de contactor de emergencia ‘CEM1, CEM2’. • Detectar la causa real del fallo y actuar en consecuencia. F16 F17 F18 • Detectado cortocircuito en la salida al motor del operador de puerta. • Comprobar las conexiones al motor y chequear el bobinado del motor. • Sobrecarga en salida a motor de tracción. • • Comprobar el consumo del motor. Elevar el parámetro que define la potencia del motor. F20 • Falta de conexión de alguna fase al motor. • Comprobar las conexiones al motor y las conexiones faston al PCB. F21 • Detectado desequilibrio de consumo en fases de conexión al motor de tracción ‘ > 20% ’. • Chequear el buen estado del motor. • Superado máximo tiempo de operación del motor de funcionamiento en maniobra de emergencia ‘función relé térmico’. • Comprobar si la aparición de este fallo es por una causa anómala o se debe a un ajuste de tiempo escaso. En este último caso, aumente el parámetro que define ese tiempo. • Detectado bloqueo de la cabina en maniobra de emergencia. Comprobar : • Si sensor no está conectado o esta defectuoso. • Si mecánicamente la cabina está bloqueada en el hueco. • Si existen deslizamientos de cables en polea. • Si la tensión de las baterías es insuficiente. • Detectado embalamiento de la cabina en maniobra de emergencia. Comprobar : • El peso que contenía la cabina cuando se efectuó la maniobra de emergencia. • Si la tensión de baterías es insuficiente. • Reducir, si es necesario, la frecuencia de trabajo. F25 • Fallo interno del sistema. • Sustituir la placa de circuito impreso. F26 • Parámetros incorrectos. • Coloque modo de programación y revise todos los parámetros. F27 • No usado. • Detectado cortocircuito o sobrecarga en la salida al motor de operador de puerta. • Detección de derivación a tierra de algún punto de las series de seguridad. • Comprobar conexiones. F28 F29 • Excesivo consumo salida 24 Vdc ‘cabina’, bornes 1, 2 ‘C1’. • Cortocircuito en la salida del motor de tracción. • Comprobar conexiones. Detección de cortocircuito, sobrecarga o derivación a tierra de alguna salida de potencia : • Freno • Leva • Motor operador de puerta. • Motor de tracción. • Comprobar conexiones. F19 F22 F23 F24 F30 Detección de derivación a tierra de algún punto de las series de seguridad. F31 • Detectada sobretemperatura en el equipo. Si se detecta durante una operación de rescate, queda abortado, si F31 está activo al iniciarse una operación de rescate. Se atrasará su ejecución hasta un máximo de 4.5 minutos, esperando que se alcance la temperatura adecuada. v4.00, FEB..04 Pag . 33 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 Capítulo . 11 • OPERACIONES DE MANTENIMIENTO El equipo RescataMAC 30 está diseñado para no tener que efectuar operaciones de mantenimiento algunas. Sin embargo, dada la alta responsabilidad del equipo y teniendo en cuenta que incorpora elementos de una relativa vida reducida ‘ baterías, según fabricante de 3 a 5 años ’, es interesante efectuar una serie de acciones preventivas que garanticen una fiabilidad total del equipo. Las baterías que incorpora el sistema son de plomo-calcio sin mantenimiento ‘12 Vac, 6.5 Ah’. Son las que, incorporando plomo, no requieren cuidado alguno y tienen una vida que aún siendo larga, normalmente suele ser bastante inferior a la de componentes electrónicos. Por ello, con idea de garantizar una operación correcta del sistema, es interesante realizar el siguiente paquete de acciones preventivas : 1) Compruebe visualmente que las baterías no presentan fugas de material interno por las juntas. 2) El sistema tras aproximadamente 2 días sin operar posee una carga cercana al 100%. En esta situación el sistema efectúa una carga de mantenimiento que hace oscilar la tensión en el margen ‘aproximadamente’ entre 67.5 y 69 voltios. Compruebe que ambos márgenes se alcanzan con una cierta periocidad. Si tras estos dos días o en alguna revisión periódica se observa que la tensión de baterías esta comprendida entre los 50 y 56 voltios, o incluso inferior, y esta tensión no se incrementa. ES ALTAMENTE PROBABLE QUE POSEA UNA O MAS BATERÍAS DETERIORADAS, POR FAVOR SUSTITUYALAS INMEDIATAMENTE PUES DE PERSISTIR ESTA SITUACIÓN DURANTE UN TIEMPO PROLONGADO EXISTE UN ALTO RIESGO DE DESTRUCCIÓN DEL EQUIPO. 3) Efectúe varias maniobras de emergencia ‘no más de 3 en cada sesión’ provocando las posibles causas de entrada, con esperas entre cada una de ellas de 5 minutos : • • Ausencia de alimentación en la red ‘cortando la acometida general’. Provocando la parada de la maniobra normal ‘si se hace uso del contacto EM2’. 11.1 Plan Preventivo Tras la instalación y puesta a punto, efectúe 3 maniobras de emergencia ‘por diferentes causas’. En el plazo siguiente de 48 horas, efectúe el mismo paquete de operaciones de emergencia 4 veces, con tiempos de espera mínimos de 8 horas. Durante las 2 semanas siguientes, cada 2 días ejecute el paquete de acciones preventivas descrito anteriormente. Posteriormente y durante toda la vida del equipo: cada mes ejecute el paquete de acciones preventivas. El número de maniobras de emergencia que puede ejecutar el equipo con las baterías a plena carga depende de un gran número de factores: • Características eléctricas del motor ‘potencia, intensidad de arranque, etc ...’. • Elementos que existen conectados ‘leva, freno, motor de operador de puerta’. • Temperatura y humedad ambiente. • Situación de carga en la cabina. Esta estimado que el nº mínimo de operaciones de rescate en el peor de los casos es 3, ejecutadas de manera consecutiva sin esperas. Se incluyen unas hojas para ejecutar el plan preventivo. Por favor, rellénelas con rigurosidad. Cada vez que complete una envíela por fax a MACPUARSA ‘954657955’, esto permitirá poseer un seguimiento fiable del producto. v4.00, FEB..04 Pag . 34 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 PLAN DE ACCIONES PREVENTIVAS RESCATAMAC 30 CLIENTE : INSTALACIÓN : POTENCIA DEL MOTOR : TENSIÓN FRENO/LEVA : ¿EXISTE LEVA? G SI G NO MOTOR OPERADOR DE PUERTA TENSIÓN : TIPO : VALOR DEL PARÁMETRO 7 : VALOR DEL PARÁMETRO 8 : INSTALACIÓN Y PUESTA A PUNTO CAUSA TENSIÓN INICIAL TENSIÓN FINAL CARGA DE CABINA FECHA/HORA 1: 2: 3: PLAN 48 HORAS ( 4 PAQUETES DE EMERGENCIA, ESPACIADOS MÍNIMO 8 HORAS ) CAUSA TENSIÓN INICIAL TENSIÓN FINAL CARGA DE CABINA FECHA/HORA 1: 2: 3: 1: 2: 3: 1: 2: 3: v4.00, FEB..04 Pag . 35 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 PLAN DE ACCIONES PREVENTIVAS RESCATAMAC 30 CLIENTE : INSTALACIÓN : POTENCIA DEL MOTOR : TENSIÓN FRENO/LEVA : ¿EXISTE LEVA? G SI G NO MOTOR OPERADOR DE PUERTA TENSIÓN : TIPO : VALOR DEL PARÁMETRO 7 : VALOR DEL PARÁMETRO 8 : PLAN DOS SEMANAS ( CADA 2 DÍAS, 1 PAQUETE DE ACCIONES PREVENTIVAS ) CAUSA TENSIÓN INICIAL TENSIÓN FINAL CARGA DE CABINA FECHA/HORA 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: v4.00, FEB..04 Pag . 36 / 37 DTRES30Es MANUAL TÉCNICO DEL PRODUCTO Sistema de Emergencia RescataMAC 30 PLAN DE ACCIONES PREVENTIVAS RESCATAMAC 30 CLIENTE : INSTALACIÓN : POTENCIA DEL MOTOR : TENSIÓN FRENO/LEVA : ¿EXISTE LEVA? G SI G NO MOTOR OPERADOR DE PUERTA TENSIÓN : TIPO : VALOR DEL PARÁMETRO 7 : VALOR DEL PARÁMETRO 8 : PLAN PREVENTIVO DE MANTENIMIENTO ( 1 PAQUETE PREVENTIVO CADA MES ) CAUSA TENSIÓN INICIAL TENSIÓN FINAL CARGA DE CABINA FECHA/HORA 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: 1: 2: 3: v4.00, FEB..04 Pag . 37 / 37 DTRES30Es www.macpuarsa.es OFICINA CENTRAL Pabellón MP Leonardo Da Vinci TA-13 Isla de la Cartuja – 41092 Sevilla Tel. +34.95.4630562 Fax +34.95.4657955 e-mail: [email protected] Nº R.: 12 100 15714/1 TMS