Controlador PID en Modo Fuerza Aplicado en un Sistema
Anuncio

Controlador PID en Modo Fuerza Aplicado en un Sistema de
Suspensión Magnética, como Caso de Estudio∗
Javier Ollervides, Vı́ctor Santibáñez, Alfredo Camarillo
Instituto Tecnológico de la Laguna,
Blvd. Revolución y Calzada Cuauhtémoc, Apdo. Postal 49, Adm. 1, Torreón, Coah., 27001, México
Tel: +52 (871) 705 13 31 ext 125 Fax: +52 (871) 705 13 26
{jollervi, vsantiba, acamaril}@itlalaguna.edu.mx
Resumen— En este trabajo se presenta un estudio teórico
y experimental de un esquema de control lineal aplicado
a un sistema de suspensión (o levitación) magnética. El
controlador de posición abordado aquı́ es del tipo “PID”
(proporcional+integral+derivativo), más un lazo de control
interno de corriente de tipo “PI” (control de fuerza proporcional+integral), que se utiliza para llevar a cabo la
levitación magnética de una esfera metálica (que puede ser
vista como un rotor traslacional). El principal ingrediente
de aportación es el haber considerado que la inductancia
del electromagneto junto con la esfera móvil (del sistema de
levitación magnética), no es constante con respecto al punto
de linealización del sistema, ya que debe ser calculada a partir
de la posición de operación del sistema linealizado (que se
obtiene a partir del modelo dinámico no lineal), lo cual no
es considerado en otros trabajos de la literatura. Además
es importante mencionar que el control interno de corriente
para llevar a cabo el control en modo fuerza, se implementa
en el algoritmo de cálculo numérico de tiempo real, y no
mediante circuitos electrónicos análogos (o analógicos), ya
que en otros trabajos de la literatura este lazo interno de
control se instrumenta mediante hardware análogo, donde no
se menciona dicha dinámica de control.
Palabras Clave— Sistemas de control lineal, sistema de levitación magnética, sistemas de suspensión magnética, sistemas
electromecánicos, modelo dinámico.
I. Introducción
El control lineal de posición de sistemas de levitación
magnética (denominado aquı́ con el sobrenombre de
“MagLev”) es ampliamente abordado en la literatura,
desde diversos puntos de vista. En este trabajo se
aborda el estudio de un controlador de tipo “PID” de
posición con un lazo de control interno de corriente “PI”,
nombrado aquı́ como controlador “PIDpos +PIcorr ” en
modo fuerza (equivalente a un controlador “PID” en
modo par, para el control de posición en motores de c.c.).
En este trabajo se describe el desarrollo sistemático para
realizar la sintonización de ganancias de este controlador,
a partir de un modelo dinámico linealizado (bajo ciertas
condiciones de operación) del sistema de suspensión
magnética, que es controlado por medio de una tensión
de entrada, ya que la corriente eléctrica del MagLev
∗ Este trabajo ha sido parcialmente apoyado por CONACYT y
DGEST.
es considerada como una variable de estado fı́sica. Es
importante mencionar la existencia de dos trabajos de
investigación desarrollados anteriormente por los autores
de este trabajo, que tratan acerca de la evaluación de controladores lineales y no lineales (Ollervides et al., 2005),
y del control borroso (Ollervides & Santibáñez, 2006)
de este mismo sistema MagLev, donde por cuestiones
de espacio en la documentación de estos trabajos, no se
incluye el análisis dinámico completo del control lineal,
que se aborda de forma clara y detallada durante el
transcurso de la documentación de este trabajo.
II. Modelo dinámico del sistema MagLev
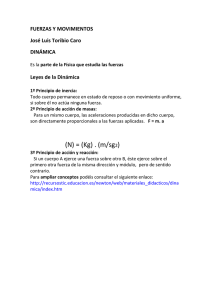
El sistema de levitación magnética puede ser visto
como una máquina eléctrica, que se compone de un rotor
traslacional sin fricción (esfera metálica), que se desplaza
por debajo de un electroimán (o electromagneto) que se
encuentra fijo a una base, tal y como se muestra en la
Figura 1.
Donde u(t) es la tensión de alimentación del electromagneto, i(t) es la corriente del electromagneto,
λ̇(t) es la tensión inducida o fuerza eléctromotriz del
electromagneto (ley de Faraday), λ(t) es el enlace de
flujo del entrehierro, R es la resistencia del alambrado,
fm es la fuerza de atracción del entrehierro en newtons
[N], fg = mg es la fuerza debida a la gravedad de la
tierra, m es la masa de la esfera con un valor de 0,068
m
[kg], y g es la constante de gravedad g = 9,81 [ seg
2]
(véase la Figura 1).
Para fines prácticos la realimentación de corriente y
posición es obtenida respectivamente a partir de i(t) =
vs (t)
Rs con Rs = 1 [Ω] (resistencia en serie) y θ(t) = kb vb (t)
con kb = 2,8 × 10−3 [ m
V ] (constante del transductor
óptico), donde vs (t) y vb (t) son las tensiones medibles
en el sistema MagLev (véase la Figura 1). La resistencia
del alambrado se denota por la constante Rc y es igual
a 10 [Ω].
La variable y(t) = c − θ(t) es la posición de la cara
superior de la esfera medida con respecto a la cara
inferior del electromagneto (entrehierro variable), y la
constante c representa el lı́mite superior de la posición
(entrehierro nominal, véase la Figura 1). El sistema
Congreso Nacional de Control Automático A.M.C.A. 2007
24-26 de octubre, Monterrey, N.L.
donde la tensión inducida se calcula como:
+
+
υ R (t)
i(t)
u(t)
.
Rc
-
λ̇(t) =
Electromagneto
+
λ(t)
Rs
υ s(t)
k
(7)
yo + y∗
donde L∗ es la inductancia propia en el punto de
equilibrio, con y∗ como la posición de operación, entonces
se tiene que:
λ(t)
y=y∗
y(t)
fm
-
(6)
Formulando la hipótesis:
L(y)
= L∗ = L∞ +
L(y)
-
+
d[L(y)i(t)]
.
dt
θ(t)
fg
c
di(t)
(8)
dt
siendo esta la ecuación de estado de la dinámica electromagnética.
Para modelar la dinámica electromecánica del MagLev, se le considera como un sistema de acumulación
de energı́a electromagnética sin perdidas, la energı́a
magnética acumulada Wm es una función de las variables
fı́sicas λ(t) y y(t) (Fitzgerald et al., 1971), mientras la
es una función de las variables i(t) y
coenergı́a Wm
y(t). Para un sistema magnéticamente lineal, la energı́a
y la coenergı́a son numéricamente iguales (Fitzgerald et
al., 1971). La energı́a y la coenergı́a se expresan de la
siguiente forma, respectivamente:
u(t) = Ri(t) + L∗
Esfera
metálica
Transductor
óptico
+
V (+)
υ b(t)
Base de la
esfera
RE
Fig. 1. Sistema de Levitación Magnética (MagLev).
MagLev tiene una inductancia variable que se describe
en (Lozano et al., 2000), definida por la ecuación:
k
L(y) = L∞ +
yo + y(t)
(1)
donde L∞ [H] es la inductancia propia del electromagneto cuando la esfera móvil esta en el infinito y se calcula
como:
L∞ = lı́m L(y)
(2)
y→∞
yo [m] es un coeficiente de desplazamiento utilizado
para definir la constante Lo , que se identifica como la
inductancia propia del electromagneto cuando la esfera
esta pegada al núcleo, expresada analı́ticamente como:
Lo = lı́m L(y) = L∞ +
y→0
k
yo
(3)
Nótese que los parámetros L∞ , Lo , yo y k forman
parte del modelo L(y), que reproduce el comportamiento
dinámico de la inductancia del MagLev, cuando la esfera
esta en levitación. Por conveniencia el parámetro k se
define posteriormente.
La relación entre λ(t) e i(t) del sistema MagLev es
descrita en (Fitzgerald et al., 1971), y se expresa como:
λ(t) = L(y)i(t).
1 λ2 (t)
,
2 L(y)
Wm
(i, y) =
1
L(y)i2 (t)
2
(9)
La ecuación de la fuerza magnética de atracción
producida por el entrehierro del electromagneto, puede
ser una función de la coenergı́a almacenada, expresada
por,
(i, y)
∂Wm
∂y
Desarrollando la expresión anterior, se tiene que,
fm =
(10)
i2 (t) dL(y)
(11)
2
dy
La fuerza de atracción aplicada al rotor se puede
calcular a partir de (1) y (11),
fm =
fm = −
i2 (t)
k
2 [yo + y(t)]2
(12)
2
donde k Nm
es la constante de fuerza del electromagA2
neto.
El movimiento o desplazamiento de la esfera móvil
es modelado mediante la suma de fuerzas aplicadas al
centroide de la esfera y recurriendo a la segunda ley de
movimiento de Newton,
(4)
Para calcular la dinámica electromagnética del MagLev, se recurre a la ley de tensiónes de Kirchhoff:
u(t) = Ri(t) + λ̇(t)
Wm (λ, y) =
(5)
mÿ(t) = fm + fg
(13)
donde mÿ(t) es la fuerza resultante aplicada al centroide
de
m la esfera y ÿ(t) es la aceleración la esfera metálica en
s , (ver Figura 1).
Congreso Nacional de Control Automático A.M.C.A. 2007
24-26 de octubre, Monterrey, N.L.
El modelo no lineal en términos del vector de estado
x(t) = [ y(t) i(t) ẏ(t) ]T se obtiene a partir de (8),
(12) y (13). La ecuación de estado resultante se expresa
como,
ẏ(t)
y(t)
d
1
i(t) = L∗ u(t) − Ri(t)
(14)
dt
2
i (t)
k
ẏ(t)
− 2m [yo +y(t)]2 + g
La ecuación (14) es un caso particular del modelo lagrangiano del MagLev presentado en (Lozano et
al., 2000).
El punto de equilibrio de la ecuación de estado se
identifica mediante las ecuaciones estáticas mostradas a
continuación:
ẏ∗ = 0,
L∗ = L∞ +
k
yo +y∗ ,
(15)
i∗ = kf f (yo + y∗ ).
A
El parámetro kf f = 2mg
k
m , representa la relación
estacionaria corriente-posición del MagLev, la cual se
obtiene de (13) en el equilibrio de fuerzas (fm + fg = 0).
Las constantes y∗ , ẏ∗ e i∗ , son la posición, la velocidad
y la corriente en el equilibrio para u(t) = u∗ (tensión
de entrada estacionaria con R = Rc + Rs ). Por lo tanto,
el punto de equilibrio en malla abierta se expresa como
x∗ = [ y∗ i∗ 0 ]T .
El modelo lineal del MagLev se obtiene mediante una
linealización aproximada del modelo no lineal expresado
en la forma ẋ = f (x, u) en (14), utilizando la serie de
Taylor evaluada en el origen, bajo la hipótesis (7), tal
que:
u∗ = Ri∗ ,
0
δy(t)
d
δi(t) = 0
dt
2g
δ ẏ(t)
yo +y∗
0
(20)
calculándose ası́ las siguientes
constantes del sistema
,
σ
linealizado: kcdc = R1 A
= LR∗ [s]como los
c
V
m
k
parámetros de la dinámica eléctrica, y kbdc = 2mg
A ,
2g(L∗ −L∞ ) rad ωb =
como los parámetros de la
k
s
dinámica electromecánica.
En la FDT (20) del MagLev, se observa claramente
la existencia de dos polos estables del plano complejo s,
uno ubicado en s1 = − σ1c , que pertenece a la dinámica
eléctrica, y el otro ubicado en s2 = −ωb , que pertenece
a la dinámica electromecánica (ambos estan ubicados en
el semiplano izquierdo del plano complejo s). Y un polo
inestable ubicado en s3 = +ωb que también pertenece
a la dinámica electromecánica (ubicado en el semiplano
derecho del plano complejo s). De forma que se concluye
que el sistema MagLev es inestable en lazo abierto.
Los valores numéricos de los parámetros de la plataforma experimental de levitación magnética MagLev
(Quanser
Consulting, 2003) son: m = 0,068 [kg], g =
9,81 sm2 , R = 11 [Ω], c = 0,014 [m], yo = 2 × 10−3 [m],
A
kf f = 142,9292 m
, L∞ = 363 [mH] y Lo = 396 [mH],
2
k = 6,5308 × 10−5 Nm
A2 . Los valores numéricos de la
FDT (20) del MagLev, se obtienen a partir de la posición
de linealización ubicada en y∗ = 7 × 10−3 [m].
III.
Objetivo de control
lı́m ye (t) = 0
t→∞
(16)
(21)
donde ye (t) = yd (t) − y(t) es el error de posición y yd es
la posición deseada constante de la esfera metálica.
de modo que el modelo lineal aproximado en la forma
δ ẋ(t) = Aδx(t) + Bδu(t), resulta ser:
δY (s)
kcdc
−kbdc
=
GLA (s) =
δU (s)
σc s + 1 s2 − ωb2
El objetivo de control es encontrar una señal u(t) tal
que:
∂f (x, u) δx
δ ẋ ≈ f (x∗ , u∗ ) +
∂x
(x,u)=(x∗ ,u∗ )
∂f (x, u) +
δu
∂u
(x,u)=(x∗ ,u∗ )
multiplicando (18) y (19) se obtiene la expresión de
la Función de Transferencia (abreviada FDT) total del
MagLev, en lazo abierto:
1
δy(t)
0
0 δi(t) + L1 δu(t)
∗
δ ẏ(t)
0
0
(17)
manipulando las ecuaciones de estado escalares a partir
de (17), se calculan las siguientes Funciones de Transferencia del MagLev:
−R
L∗
−2g
i∗
GC (s) =
kcdc
δI(s)
=
δU (s)
σc s + 1
(18)
GM (s) =
−kbdc
δY (s)
= 2
δI(s)
s − ωb2
(19)
IV. Ley de control en modo fuerza “PIDpos +PIcorr”
Esta ley de control esta formada por un lazo interno
que retroalimenta la corriente del electromagneto hacia
un control tipo “PIcorr”, que a su vez, recibe una variable
deseada de corriente id (t) que proviene de un controlador
de posición tipo “PIDpos ”. El control en modo fuerza
que proporciona este controlador, se debe al control de
corriente del lazo interno. Esta ley de control se expresa
analı́ticamente mediante las siguientes ecuaciones:
ie (t) = id (t) − i(t)
(22)
Congreso Nacional de Control Automático A.M.C.A. 2007
uv (t) = kpc ie (t) + kic
ie (t)dt
(23)
24-26 de octubre, Monterrey, N.L.
precompensación
kff
kib
s
yd
.
y
d
-
y e (t)
Σ
kpb
+
ye (t)
kv
Σ
+
.
+
=0
+
-
Σ
id (t)
+
+
+
k ic
s
iff
Σ
ie (t)
-
kpc
+
u(t)
Σ
+
FDT del MagLev
i(t) -k bdc ω b 2
kcdc
(σ c s+1)
y(t)
(s -ω b )
2
2
.
y(t)
s
Fig. 2. Sistema de control “PIDpos +PIcorr ”.
id (t) = kpb ỹ(t) + kib
ỹ(t)dt + kv ẏ(t)
uc (t) = id (t) + kf f yd
(24)
+
(25)
donde uc (t) es la corriente calculada por la ley de control
de control “PIDpos ” más el término de precompensación
de fuerza expresado como if f = kf f yd , id (t) es la
corriente dinámica del posicionamiento deseado e ie (t)
es el error de corriente del lazo de control interno
“PIcorr ”. La variable uv (t) = u(t) representa la tensión de
control en modo fuerza que se aplica al sistema MagLev,
mientras que, kpb y kpc son las ganancias proporcionales
de posición y de corriente respectivamente, kib y kic
son las ganancias integrales de posición y corriente
respectivamente, y kv es la ganancia de velocidad. En
el diagrama de bloques de la Figura 2 se muestra la
estructura del controlador “PIDpos +PIcorr ”.
IV-A. Sintonización del controlador interno “PIcorr ” de
corriente
El primer paso consiste en sintonizar las ganancias kpc
y kic del controlador interno “PIcorr ” de corriente de tal
manera que la dinámica electromagnética sea muy rápida
con respecto al tiempo y exponencialmente estable, de
tal forma que se pueda considerar como una función
estática unitaria, con respecto al controlador del lazo
externo “PIDpos ” de posición. Para la sintonización de
las ganancias se utiliza el método analı́tico de ubicación
de los polos y ceros para sistemas lineales (Quanser
Consulting, 2003).
La FDT del controlador “PIcorr ” se expresa como (ver
la Figura 3):
kpc
kic
L∗
kic s + 1
δI(s)
=
GCLC (s) =
R+kpc
δId (s)
s + kLic∗
s2 +
L∗
id (t)
(26)
donde se puede identificar el siguiente polinomio caracterı́stico:
kic
s
Σ
ie (t)
-
kpc
+
u v (t) kcdc
Σ
(σc s+1)
+
i(t)
Fig. 3. Controlador PIcorr de corriente (o en modo fuerza).
2
Pc (s) = s +
R + kpc
L∗
s+
kic
L∗
(27)
que al comparalo con el polinomio caracterı́stico deseado
(de la la dinámica electromagnética), expresado como:
Qc (s) = s2 + (−αc1 − αc2 )s + αc1 αc2 = 0
(28)
se obtiene el siguiente par de ecuaciones de sintonización:
kpc = −(αc1 + αc2 )L∗ − R
kic = αc1 αc2 L∗
(29)
Los valores obtenidos en la sintonización de ganancias
del lazo de control interno “PIcorr ” son kpc = 100 [ V
A ],
V
kic = 70 [ A−s
]. La respuesta experimental de este
subsistema de control se muestra en la Figura 4, donde
se observa una dinámica exponencial de la corriente del
electromagneto, con un polo dominante de lazo cerrado
ubicado en αc1 = −0,867 [ rad
s ], un polo no dominante
]
y un cero dominante de la
ubicado en αc2 = −218 [ rad
s
FDT ubicado en zc3 = −0,7 [ rad
s ]. Nótese que el polo
y el cero dominante tienen valores muy cercanos, por lo
que ambas diámicas tienden a cancelarse, por lo tanto
la respuesta dinámica de lazo cerrado (teórica ) tiende a
depender de la ubicación del polo αc2 = −218 [ rad
s ] cuya
constante de tiempo es σc2 = |α1c2 | = 4,6 [ms].
En la Figura 4 se observa la respuesta experimental
de la corriente del electromagneto, donde se identifica
Congreso Nacional de Control Automático A.M.C.A. 2007
24-26 de octubre, Monterrey, N.L.
Precompensación
1.832
1.81
k ff
k ib
s
1.7
Corriente (A)
1.6618
yd
1.6
.
y
1.5
d
=0
ye (t)
Σ
.
+
-
1.4
+
kpb
Σ
+
ye (t)
Σ
id (t)
+
+
iff
Σ
Dinámica
Elctromecánica
-k bdc ω b 2
u c (t)
+
kv
2
.
y(t)
+
y(t)
(s -ω b )
2
s
1.318
1.288
Fig. 5. Controlador “PIDpos ” de posición.
0.483
0.511
0.54
0.56
0.58
0.6
Tiempo (segundos)
Fig. 4. Respuesta experimental de la corriente.
el valor experimental aproximado de la constante de
tiempo de lazo cerrado (σclc = 28 [ms]). Es importante
mencionar que este valor es muy cercano a σc2 (calculada
teóricamente), tomando como referencia las cantidades
de las constantes de tiempo σc1 = |α1c1 | = 1,15 [s] y
σc3 = |z1c3 | = 1,42 [s].
IV-B. Sintonización del controlador externo “PIDpos ”
de posición
Una vez que la dinámica electromagnética ha sido
compensada, es decir, el subsistema de control interno de
corriente (“PIcorr ”) se considera como una función estática unitaria, y entonces es posible realizar directamente el
análisis de lazo cerrado del sistema de control de posición
de la dinámica electromecánica del MagLev. Donde la ley
de control uc (t), que consiste en un controlador “PIDpos ”
más el término if f = kf f yd de precompensación de
corriente o fuerza, se aplica directamente a la dinámica
electromecánica del MagLev (ver la Figura 5). La FDT
δY (s)
del controlador “PIDpos ”
de lazo cerrado GMLC = δY
d (s)
del MagLev se expresa como:
2gkib
i∗
kf f +kpb
kib
2gkib
Pb (s) = s +
s +
s+
i∗
(31)
que al compararlo con el siguiente polinomio caracterı́stico deseado (de la dinámica electromecánica), expresado
como:
2gkv
i∗
2
2g 2gkpb
+
y∗
i∗
kpb =
i∗ (αb1 αb2 +αb1 αb3 +αb2 αb3 + y2g
)
∗
2g
b2 +αb3 )
kv = − i∗ (αb1 +α
2g
αb2 αb3 )
kib = − i∗ (αb12g
(33)
Los valores obtenidos en la sintonización de ganancias
A
del lazo de control externo “PIDpos ” son kpb = 380 m
,
A
y kv = 15 A−s
kib = 750 s−m
m . Al evaluar la
sintonización de ganancias en la FDT de lazo cerrado del
MagLev, se tiene un par de polos complejos conjugados
dominantes de lazo cerrado ubicados en α(b1,b2) =
−6,85 ± j2,5 [ rad
s ], un polo real no dominante ubicado
en αb3 = −215 [ rad
s ] y un cero dominante ubicado en
]
que
proporciona una mejora potencial
zb4 = −1,43 [ rad
s
aumentando la velocidad de subida de la de la respuesta
transitoria de la posición (Lewis et al., 1997). El factor
de amortiguamiento ζ se puede calcular a partir de
(Kuo, 1996):
ζ = cos(β)
s+1
2gkpb
2gkib
s
+
i∗
i∗
(30)
donde se identifica el siguiente polinomio caracterı́stico
de lazo cerrado:
(32)
se obtienen las siguientes ecuaciones de sintonización
para la dinámica electromecánica:
δY (s)
=
δYd (s)
v
2 + 2g +
s3 + 2gk
s
i∗
y∗
3
Qb (s) = s3 + (−αb1 − αb2 − αb3 )s2 +
(αb1 αb2 + αb1 αb3 + αb2 αb3 )s − αb1 αb2 αb3 = 0
(34)
donde β es el ángulo de los polos complejos conjugados
en el plano sy se calcula como:
ωd
(35)
β = arctan
ζωn
donde ωd = ωn 1 − ζ 2 es la frecuencia natural amortiguada, ωn es la frecuencia natural no amortiguada,
σd = ζω1n es la constante de tiempo, siendo estos los
parámetros de un sistema de segundo orden (Kuo, 1996).
En este caso los valores numéricos de cada parámetro
rad
son: ωd = 2,5[ rad
s ], ωn = 7,26[ s ], σd = 145 [ms],
ζ = 0,939. La FDT de este sistema de control presenta
la siguente agrupación de polos y ceros dominantes:
Congreso Nacional de Control Automático A.M.C.A. 2007
24-26 de octubre, Monterrey, N.L.
experimento (negro)
simulación (azul)
+1
δY (s)
= 2
(36)
δYd (s)
s + 2ζωn s + ωn2
por lo que la respuesta a la entrada escalón tiene un
perfil algo diferente a la respuesta tı́pica de un sistema
de segundo orden, como se mencionó anteriormente,
ya que la presencia del cero real altera el criterio
π
de comportamiento como el tiempo
pico tp = ωd , el
− √ πζ
1−ζ 2
y el tiempo
porcentaje del sobrepaso Mp = e
de establecimiento ts = 4σd (Lewis et al., 1997). El
−1
coeficiente ρ = kib [(kf f + kpb ) ωn ] designa una razón
que especifica la magnitud del cero con respecto a ωn .
En este caso el cero zb4 esta ubicado en el valor más
próximo al origen (ρ = 193 × 10−3 ) con una influencia
visiblemente prominente, afectando la velocidad de subida y el sobrepaso máximo de la respuesta dinámica
de posición (Lewis et al., 1997), tal y como se muestra
en la Figura 6. La FDT de lazo cerrado del sistema
de control “PIDpos +PIcorr” (sin despreciar la dinámica
electromagnética) se puede expresar como:
Posición (mm)
s
ρωn
8
7
6
1
2
3
4
5
6
7
8
9
10
2
3
4
5
6
7
8
9
10
2
3
4
5
6
7
8
9
10
1.4
Corriente (A)
1.2
1
0.8
0.6
1
Tensión (volts)
kωn2
20
15
10
5
0
1
Tiempo (segundos)
Fig. 6. Respuesta del sistema de control.
2
1.5
(37)
donde a4 = L∗ pc , a3 = KLic
− ωb2 + k1 kv , a2 = k1 kpb +
∗
k2 kv − k3 , a1 = k1 kib + k2 kpb − k4 , a0 = k2 kib , b3 = k1 kv ,
b2 = k1 (kpb + kf f ) + k2 kv , b1 = k1 kib + k2 (kpb + kf f ), b0 =
k
k2 kib , kdc = 1, k1 = kbdc ωb2 ( Lpc
), k2 = kbdc ωb2 ( kLic∗ ), k3 =
∗
R+K
ωb2
R+kpc
L∗
, k4 = ωb2 ( kLic∗ ).
1
Error de posición (mm)
kdc (b3 s3 + b2 s2 + b1 s + b0 )
GLC (s) = 5
s + a 4 s4 + a 3 s3 + a2 s2 + a 1 s + a 0
T
y(0) i(0) ẏ(0)
=
0
−0.5
−1
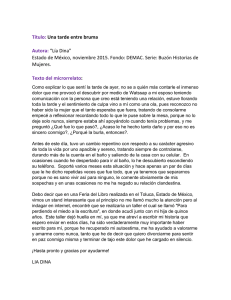
IV-C. Respuesta experimental del sistema de control
En la Figura 6 se muestran las gráficas (experimentales
y simuladas) de la respuesta del sistema de control
“PIDpos +PIcorr ” aplicado al sistema MagLev. La variable de entrada es una onda escalón de 2 [mm] de
amplitud, con f = 0,2 [Hz].
Las condiciones iniciales se ubicaron en:
0.5
0,006[m] ieq [A] 0[ ms ]
−1.5
−2
2
V. Conclusiones
En este trabajo se realizó la validación experimental
del modelo lineal de un sistema de suspensión magnética, obteniéndose resultados satisfactorios, ya que la
respuesta simulada de la posición es razonablemente
parecida a la respuesta experimental del sistema. El
comportamiento del error de posición mostrado en la
Figura 7 presenta menor desempeño que los controladores no lineales (IDA-PBC) evaluados en (Ollervides et
al., 2005). El controlador borroso tipo “PD” propuesto
y evaluado en (Ollervides & Santibáñez, 2006) presenta
una respuesta con mayor error en estado estacionario que
el controlador evaluado en este trabajo .
3
3.5
4
4.5
5
5.5
6
6.5
7
Tiempo (segundos)
Fig. 7. Respuesta experimental del error de posición.
Referencias
T
(38)
La frecuencia de muestreo para el cálculo numérico en
tiempo real del controlador se asignó en fs = 1 KHz.
2.5
Ollervides, J., A. Ruelas, V. Santibáñez & A. Sandoval, (2005).
Evaluación Experimental de Controladores Lineales y No
Lineales en el Sistema de Levitación Magnética MagLev.
Memorias del Congreso Nacional de Control Automático,
Cuernavaca, Morelos México, Oct. 2005.
Ollervides, J., V. Santibáñez, (2006). Control Borroso de un
Sistema de Suspensión Magnética. Memorias del Congreso
Nacional de Control Automático, UNAM, México D.F , Oct.
2006.
Quanser Consulting Magnetic Levitation (MagLev), (2003). Instructor Manual, Specialty Experiment: PIV-plus-Feedfoward
Control. Quanser Innovate Educate, 2003.
Fitzgerald, A. E., Ch. Kingsley Jr. & A. Kusko, (1971). Electric
Machinery. Third Edition. The Processes, Devices, and Systems of Electromechanical Energy Conversion, pp. 2-5, pp.
8-11, pp. 86-95 1971.
Lozano, R., B. Brogliato, O. Egeland & B. Maschke , (2000). Dissipative systems analysis and control. Springer-Verlag London,
2000.
Lewis, Paul H., Chang Yang, (1999). Basic Control Systems
Engineering. Prentice Hall, 1997.
Kuo, Benjamin C., (1994). Automatic Control Systems. Prentice
Hall, 1994.
Congreso Nacional de Control Automático A.M.C.A. 2007
24-26 de octubre, Monterrey, N.L.