REPBLICA BOLIVARIANA DE VENEZUELA
Anuncio

REPÚBLICA BOLIVARIANA DE VENEZUELA
UNIVERSIDAD RAFAEL URDANETA
FACULTAD DE INGENIERÍA
ESCUELA DE ELÉCTRICA
DISEÑO E IMPLEMENTACION DE UN PROTOTIPO PARA EL
MONITOREO Y VISUALIZACION DIGITAL DE LAS SEÑALES
ANALOGAS EMITIDAS POR LOS MOTORES MARINOS. CASO
MITSUBISHI TIPO S6B3-MPTK INSTALADOS EN LA LANCHA
TIBURON lll MODELO 1992 FABRICADA POR INAVEN C.A.
PERTENECIENTES A LA EMPRESA ZULIA TOWING AND BARGE Co.
OS
D
A
V
R
RESE
C.A.
S
O
H
C
E
DER
INGENIERO ELECTRICISTA
TRABAJO ESPECIAL DE GRADO PARA OPTAR POR EL TÍTULO DE
PRESENTADO POR:
Br.GARCIA VICENTE, Luis Eduardo
C.I. 15.523.291
ASESOR ACADÉMICO:
Ing. Nesky Tapia.
C.I. 12.216.305
Maracaibo, Julio 2005
DISEÑO E IMPLEMENTACION DE UN PROTOTIPO PARA EL
MONITOREO Y VISUALIZACION DIGITAL DE LAS SEÑALES
ANALOGAS EMITIDAS POR LOS MOTORES MARINOS. CASO
MITSUBISHI TIPO S6B3-MPTK INSTALADOS EN LA LANCHA
TIBURON lll MODELO 1992 FABRICADA POR INAVEN C.A.
OS
D
A
V
R
RESE
PERTENECIENTES A LA EMPRESA ZULIA TOWING AND BARGE Co.
S
O
H
C
E
DER
C.A.
REPÚBLICA BOLIVARIANA DE VENEZUELA
UNIVERSIDAD RAFAEL URDANETA
FACULTAD DE INGENIERÍA
ESCUELA DE ELÉCTRICA
DISEÑO E IMPLEMENTACION DE UN PROTOTIPO PARA EL
MONITOREO Y VISUALIZACION DIGITAL DE LAS SEÑALES
ANALOGAS EMITIDAS POR LOS MOTORES MARINOS. CASO
OS
D
A
V
R
RESE
MITSUBISHI TIPO S6B3-MPTK INSTALADOS EN LA LANCHA
TIBURON lll MODELO 1992 FABRICADA POR INAVEN C.A.
S
O
H
C
E
DER
PERTENECIENTES A LA EMPRESA ZULIA TOWING AND BARGE Co.
C.A.
Br.GARCIA VICENTE, Luis Eduardo
C.I. 15.523.291
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
DEDICATORIA
Ante todo a Dios y a la Virgen, a Mami y a Papi que en todo momento
fueron impulsores é inspiración para lograr culminar este trabajo y mi carrera,
a mi novia Jessica que siempre estuvo a mi lado desde que el principio
ayudando en lo que pudo he insistiendo en terminar esta Tesis.
A todos mis amigos que ayudaron de una u otra forma a la
culminación de este trabajo, Luis (el primo) en especial y a todos mis
compañeros de URU que involuntariamente ayudaron a terminar mi carrera,
mis compañeros de controles industriales y de sistemas de controles no los
voy a nombrar a todos pero ya sabes quienes son…
S
O
D
A
V
ER
S
E
R
S de siempre Bea, Osvi, Angel, Porfi, Carlos,
No podía faltar mis
amigos
O
H
C
E
DER
Aybet y María que bueno, aunque algunos estén lejos los tengo presente en
este triunfo, los quiero mucho…
Luis E. Garcia V.
VI
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
AGRADECIMIENTOS
A mis padres por darme el apoyo de seguir adelante con las metas de
mi vida, a mi novia por ayudar de forma voluntaria, Luis (primo) por esa
ayuda incondicional, a todas las personas que día a día me ayudan a ser un
profesional, agradezco a todos los profesores que inculcaron en mi sus
conocimientos tanto universitarios como de vida ayudando a formarme
durante mi carrera, Profa Nancy, Geryk, Nesky, Torres, Largo entre otros que
gracias a ellos me siento en capacidad de enfrentar cualquier problema no
solo que tenga que ver con mi carrera si no también en mi vida GRACIAS
PROFES…..
S
O
D
A
V
ER
S
E
R
SRicardo y al jefe Yuris Sánchez, que gracias a
Luigui, Orlando, Nava, Nestor,
O
H
C
E
DER
su apoyo tanto logístico como teórico me ayudaron a dar un gran paso como
A los muchachos del departamento de eléctrica de Zulia Towing…
lo es la culminación de la tesis, y a todo el personal de Zulia Towing que de
alguna u otra forma colaboró con mi persona como el personal de seguridad
y el cuerpo de mecánicos… gracias muchachos….
Y para los que no nombre GRACIAS POR SIEMPRE….
Luís E. García V.
VII
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
RESUMEN
GARCÍA VICENTE, Luis Eduardo. DISEÑO E IMPLEMENTACION DE UN
PROTOTIPO PARA EL MONITOREO Y VISUALIZACION DIGITAL DE LAS
SEÑALES ANALOGAS EMITIDAS POR LOS MOTORES MARINOS. CASO
MITSUBISHI TIPO S6B3-MPTK INSTALADOS EN LA LANCHA TIBURON
lll MODELO 1992 FABRICADA POR INAVEN C.A. PERTENECIENTES A
LA EMPRESA ZULIA TOWING AND BARGE Co. C.A. Trabajo Especial de
Grado para obtener el Título de Ingeniero Electricista; Maracaibo –
Venezuela: Universidad Rafael Urdaneta, Facultad de Ingeniería, Abril 2006.
Zulia Towing and Barge CO. C.A. es una empresa de servicio marítimo
que realiza sus operaciones en distintos puertos del país. El objeto social de
la compañía es la compraventa, importación, exportación, construcción,
reparación y arrendamiento de todo tipo de gabarras, remolcadores y naves,
así como de sus equipos y partes. Este trabajo consistió en realizar un
estudio de todo el sistema original de monitoreo y visualización de la lancha
Tiburón lll perteneciente a la empresa Zulia Towing and Barge CO. C.A, con
el objetivo de diseñar un sistema nuevo de fácil comprensión para el usuario
de la embarcación, basado en el diseño de dos programas los cuales
trabajan en conjunto con un ordenador, permitiendo visualizar por medio de
una interface gráfica representada por el monitor del ordenador donde se
podrán observar las variables en tiempo real. El programa diseñado para la
visualización tiene la cualidad de alertar por medio de una señal visual
alguna alteración de las variables escogidas como, temperatura, presión de
aceite, gasolina, revoluciones por minuto del motor y el voltaje de la
embarcación; aparte, posee un contador de horas de servicio y otro de horas
de trabajo los cuales permiten tener un control preciso para la prestación de
los servicios a realizársele a la embarcación, tales como cambio de aceite,
filtros de aire, separadores de agua entre otros.
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Palabras claves: Visualización, monitoreo, diseño.
VIII
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
ÍNDICE GENERAL
VEREDICTO .............................................................................................. V
DEDICATORIA .......................................................................................... VI
AGRADECIMIENTOS................................................................................VII
RESUMEN .................................................................................................Vlll
ÍNDICE GENERAL.....................................................................................lX
ÍNDICE DE FIGURAS................................................................................X
ÍNDICE DE TABLAS ..................................................................................XII
INTRODUCCIÓN .......................................................................................1
CAPÍTULO I- EL PROBLEMA
1.1. Planteamiento del Problema...........................................................3
1.2. Formulación del Problema ..............................................................7
1.3. Objetivos de la Investigación ..........................................................7
1.3.1. Objetivo General......................................................................7
1.3.2. Objetivo Especifico ..................................................................8
1.4. Justificación de la Investigación......................................................9
1.5. Delimitación de la Investigación......................................................10
1.5.1. Delimitación Espacial ..............................................................10
1.5.2 Delimitación Temporal..............................................................11
S
O
D
A
V
ER
S
E
2.1. Antecedentes..................................................................................12
R
OS
H
C
2.2. ReseñaR
histórica
.............................................................................12
E
DEteóricas ................................................................................14
2.3. Bases
CAPÍTULOII.-MARCO TEÓRICO
2.3.1. Motor de Combustión ..............................................................14
2.3.1.1. Funcionamiento del Motor de Combustión .......................15
2.3.1.2. Partes del Motor Diesel....................................................17
2.3.1.3. Especificaciones técnicas del Motor Mitsubishi tipo
S6B3-MPTK ..................................................................... 24
2.3.2. Sensores ................................................................................. 24
2.3.3. Sistema Eléctrico de la Lancha (Tiburón III Modelo 1992,
fabricada por INAVEN C.A. perteneciente a la empresa
ZULIA TOWING AND BARGE Co. C.A...................................25
2.3.4. Tarjeta Electrónica Conversora (Análogo-Digital)....................25
2.3.4.1. PIC ................................................................................... 25
2.3.5. Software Controlador…………………………………………... 31
2.3.6. Interfase ..................................................................................31
2.3.6.1. Tipos de armónicas ..........................................................
2.3.6.2. Efectos de las armónicas .................................................
2.4. Definición de Términos Básicos......................................................32
X
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
2.5. Mapa de variables .......................................................................... 35
CAPITULO III: MARCO METODOLÓGICO.
3.1. Tipo de investigación ...................................................................... 40
3.2. Diseño de investigación.................................................................. 41
3.3. Técnica de recolección de datos .................................................... 42
3.3.1. Observación documental ......................................................... 42
3.3.2. Observación Directa ................................................................ 43
3.3.3. Entrevista no estructurada....................................................... 44
3.4. Procedimiento de la investigación .................................................. 45
3.5. Fases de la Investigación …………………………………………… 45
CAPITULO IV: ANÁLISIS DE RESULTADOS.
4.1. Sistema de monitoreo y visualización original de los
motores marinos Mitsubishi tipo S6B3-MPTK................................. 48
4.2. Se diseñará una tarjeta electrónica para la conversión de las
señales análogas a digital emitidas por los motores marinos
Mitsubishi tipo S6B3-MPTK de la lancha Tiburón
III………………………………………………………………………. 54
4.3. Software para la comunicación entre el sistema convertidor de
señales emitidas por los motores marinos Mitsubishi tipo S6B3MPTK y la unidad procesadora (CPU) a ser instalada en la
lancha Tiburón III. ........................................................................... 56
4.3.1. Programa del Microcontrolador (PIC) ...................................... 56
4.3.1.1. Explicación de los procedimientos y
Funciones ......................................................................... 58
4.3.1.1.1. Configuración del programa ......................................... 58
4.3.1.2. Programa Principal ........................................................... 58
4.3.2. Programa C++ ........................................................................ 76
4.3.2.1. Explicación del programa completo .................................. 76
4.3.2.2. Explicación de los procedimientos y funciones…………. 77
4.3.3. Cálculo de las variables utilizadas para el sistema de
monitoreo………………………………………………………... 93
4.4. Interfase entre el usuario y el sistema de monitoreo y
visualización digital a instalar en la lancha Tiburón III…………... 96
4.5. Implementar el prototipo para el monitoreo y visualización
digital diseñado para los motores marinos Mitsubishi tipo S6B3-MPTK
instalados en la lancha Tiburón III modelo 1992 fabricada por Inaven
C.A. perteneciente a la empresa Zulia Towing and Barge Co.
C.A.……………………………………………………………………………... 97
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
XI
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
MANUAL DEL USUARIO…………………………………………………….. 100
CONCLUSIONES ...................................................................................... 112
RECOMENDACIONES.............................................................................. 114
ANEXOS ....................................................................................................
BIBLIOGRAFÍA .......................................................................................... 115
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
XII
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
INTRODUCCIÓN
Zulia Towing and Barge Co. C.A. es una empresa que ha estado
operando desde 1957, en el mercado de transporte marítimo con una flota
propia, las cuales han venido prestando servicio a través de los años en
forma regular y permanente en los distintos puertos y terminales portuarios
del país: petroleros y comerciales.
Actualmente en la empresa Zulia Towing and Barge CO. C.A.
específicamente en la lancha Tiburón lll, la cual fue escogida para este
trabajo, se presenta un problema de ineficiencia, con respecto al sistema de
verificación de las señales emitidas en tiempo real por los motores marinos
S
O
D
A
V
ER
S
E
R
S el cual permita tener un conocimiento
sistema de verificaciónH
deO
señales,
C
E
DER
preciso del funcionamiento de los motores.
modelo mitsubishi S6B3-MPTK, por lo que se planteó realizar un nuevo
La siguiente investigación está conformada por cuatro capítulos. En el
primer capítulo, se plantea y se hace la formulación del problema en sí,
justificando el por qué de esta investigación.
El segundo capítulo está conformado por un conjunto de fundamentos
teóricos básicos para la realización de los objetivos.
1
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
En el tercer capítulo, se expone la metodología utilizada para el tipo de
investigación, el diseño de la investigación, así como las técnicas de
recolección de datos y las diversas fases en las cuales se dividió este
proyecto de investigación.
En el cuarto capítulo se encuentran plasmados los resultados de la
investigación explicados en las fases antes expuestas, con la intención de
implementar un sistema de monitoreo y visualizacion digital, para mejorar el
desempeño de los motores marinos modelo mitsubishi S6B3-MPTK por
cuanto se estudiaron los sistemas originales de monitoreo y visualización, a
fin de lograr un diseño lo suficientemente eficaz que permita recolectar datos
esenciales para el manteminiento, visualizacion y monitoreo de los
S
O
D
A
V
ER
S
E
R
OS
parámetros en que el motor debe de funcionar y hacer que el sistema tenga
H
DEREC
una buena respuesta de desconexión al momento de una falla.
Finalmente se exponen las conclusiones de esta investigación, y de
igual forma se hacen las recomendaciones consideradas pertinentes para ser
implementadas por la empresa, complementados con los correspondientes
anexos.
2
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
CAPITULO I
EL PROBLEMA
1.1 Planteamiento del problema.
La industria marítima en el Lago de Maracaibo, es una actividad
económica que gira alrededor de la labor petrolera costa afuera desarrollada
por PDVSA y por las empresas de la apertura petrolera, de capital accionario
internacional.
La empresa Zulia Towing and Barge, dentro de la cual se centra el
presente estudio, pertenece a ese ramo de la actividad económica petrolera,
S
O
D
A
V
ER
S
E
R
OS
que cada día es más exigente.
RECH
E
D
La flota de Zulia
Towing and Barge está constituida por 9
remolcadores, 8 lanchas de transporte de pasajeros, y una barcaza
multipropósito. La distribución geográfica de estos equipos contempla las
áreas de Maracaibo, Puerto Cabello y La Guaira, concentrándose en estos
dos últimos, en forma exclusiva, en la operación en los puertos comerciales
únicamente.
3
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
En Maracaibo, el transporte de personal es una de las principales
actividades desempeñadas por Zulia Towing, principalmente para la empresa
SHELL de Venezuela, S.A y la empresa Bulkguasare, mediante la utilización
de 7 lanchas tipo Water Jet de casco de aluminio y alto confort, y 01 lancha
de casco de aluminio igualmente, pero propulsada por propelas abiertas,
acopladas a una planta motriz de alto desempeño, turbo alimentada.
En tal sentido, y por ser el transporte de personal una actividad
medular de Zulia Towing, que de por sí es sumamente delicada ya que se
transportan vidas humanas, exige que las unidades estén en condiciones
óptimas de operación y muy especialmente las plantas de propulsión
(motores marinos), para ofrecer así un servicio confiable, que le permita
S
O
D
A
V
ER
S
E
R
OS
obtener un beneficio comercial con rentabilidad acorde a la inversión.
RECH
E
D
Para el desarrollo de este estudio, el objetivo se ha centrado en la
unidad TIBURON III, la cual es una lancha construida en 1.992, por INAVEN,
y que es propiedad actualmente de la empresa marítima ZULIA TOWING
AND BARGE Co., C.A., subsidiaria del grupo VIRGINIA, y la cual se
encuentra equipada con dos motores gemelos, tipo Turbo Alimentado marca
MITSUBISHI, modelo S6B3-MPTK, los cuales están acoplados mediante una
caja reductora a un eje que impulsa una propela cada uno, con paso de 40
4
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
pulgadas, que ofrecen un rendimiento en conjunto de 24 nudos a la unidad,
cargada con pasajero y buen tiempo.
Esta unidad, es operada desde una cabina de mando ubicada en la
proa de la embarcación en la cual se sienta el PATRÓN, quien conduce la
lancha. En dicha cabina se encuentran ubicados en un panel frontal los
diales indicadores de los diferentes parámetros de operación de los motores
MITSUBISHI, modelo S6B3-MPTK, los cuales se encuentran alojados en el
compartimiento de máquinas de la unidad, ubicado dentro del casco y a popa
de la cabina de pasajero.
Los parámetros de funcionamiento de las plantas motrices de la
S
O
D
A
V
ER
S
E
R
S su uso, por tanto el monitoreo constante
encuentran dichos motores
durante
O
H
C
E
DER
lancha Tiburón III indican el rendimiento y las condiciones en que se
de dichos parámetros con el objeto de conocer en todo momento que los
motores están operando dentro de los límites y condiciones establecidos por
el fabricante, permiten prevenir averías que causen el mal funcionamiento de
los mismos, producto de la falla de alguno de sus componentes, que implique
la suspensión de operaciones de la unidad con el consecuente lucro cesante
que esto produce y los costos de reparación asociados. De allí que el
funcionamiento
apropiado
de
los
indicadores
arriba
mencionados,
representan un factor clave en la apropiada explotación comercial de la
5
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
unidad y garantizan un funcionamiento seguro para sus operadores y
pasajeros.
Así pues, basados en la premisas antes declaradas, se verá cuán vital
es la incorporación de un sistema de recolección de data analógica que
represente las condiciones reales de funcionamiento de los motores
MITSUBISHI, modelo S6B3-MPTK, y que las presente al PATRÓN de la
lancha de manera visual en una pantalla de fácil comprensión, que permita la
instalación de mecanismos de alarmas auditivas y visuales que realcen y
adviertan al PATRÓN de la lancha sobre las desviaciones de los parámetros
de funcionamiento de los mencionados motores, para prevenir su uso mas
allá de los límites establecidos por el fabricante, los cuales garantizan la
S
O
D
A
V
ER
S
E
R
deberá incluir mecanismos
deSdetención temprana de funcionamiento para
O
H
C
E
DER
operación confiable de los motores; como valor agregado, este sistema
valores de parámetros iguales o muy próximos a los valores de destrucción
de componentes del motor MITSUBISHI, modelo S6B3-MPTK, para evitar
que sufra un colapso mecánico, como los ha venido presentando (fundición
de los motores MITSUBISHI, modelo S6B3-MPTK) ; igualmente se espera
lograr que la data digital recolectada por este sistema permita llevar registros
históricos que aplicados a los programas de cuidado mecánico, ayuden al
departamento de Mantenimiento de Zulia Towing and Barge Co., C.A., a
6
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
realizar el mantenimiento preventivo a tiempo, con la consecuente
disminución en los índices de labores correctivas sobre las plantas motrices.
1.2 Formulación del problema.
Por tal motivo se plantea siguiente interrogante:
¿Cuáles serán las especificaciones técnicas requeridas en los nuevos
sistemas de monitoreo y visualizacion digital a ser instalados en los motores
marinos Mitsubishi tipo S6B3-MPTK de la lancha Tiburon III modelo 1992
fabricada por Inaven C.A. perteneciente a la empresa Zulia Towing and
Barge Co. C.A.?
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
1.3 Objetivos.
1.3.1 Objetivo general.
Diseñar e implementar un sistema de monitoreo y visualización
digital de las señales análogas emitidas por los motores marinos
Mitsubishi tipo S6B3-MPTK instalados en la lancha Tiburón III modelo
1992 fabricada por Inaven C.A. pertenecientes a la empresa Zulia
Towing and Barge Co C.A.
7
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
1.3.2 Objetivos específicos.
1. Estudiar el sistema de monitoreo y visualización original de
los motores marinos Mitsubishi tipo S6B3-MPTK instalados en la
lancha
Tiburón
III
modelo
1992
fabricada
por
Inaven
C.A.
pertenecientes a la empresa Zulia Towing and Barge Co. C.A.
2. Diseñar una tarjeta electrónica para la conversión de las
señales análogas a digital emitidas por los motores marinos Mitsubishi
tipo S6B3-MPTK de la lancha Tiburón III modelo 1992 fabricada por
Inaven C.A. pertenecientes a la empresa Zulia Towing and barge Co.
C.A.
S
O
D
A
V
ER
S
E
R
S para la comunicación entre el sistema
3. Elaborar
un
software
O
H
C
E
DER
convertidor de señales emitidas por los motores marinos Mitsubishi
tipo S6B3-MPTK y la unidad procesadora (CPU) a ser instalada en la
lancha
Tiburón
III
modelo
1992
fabricada
por
Inaven
C.A.
perteneciente a la empresa Zulia Towing and Barge Co. C.A.
4. Desarrollar una interfase entre el usuario y el sistema de
monitoreo y visualización digital a instalar en la lancha Tiburón III
8
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
modelo 1992 fabricada por Inaven C.A. perteneciente a la empresa
Zulia Towing and Barge Co. C.A.
5. Implementar el prototipo del sistema de monitoreo y
visualización digital diseñado para la lancha Tiburón III modelo 1992
fabricada por Inaven C.A. perteneciente a la empresa Zulia Towing
and Barge Co. C.A.
6. Elaborar un manual de usuario para el sistema de monitoreo
y visualización digital a instalar en la lancha Tiburón III modelo 1992
fabricada por Inaven C.A. perteneciente a la empresa Zulia Towing
and Barge Co. C.A.
S
O
D
A
V
ER
S
E
R
S de la investigación.
1.4 Justificación e importancia
O
H
C
E
DER
Este trabajo permite mejorar el desempeño de los motores marinos
modelo Mitsubishi S6B3-MPTK por cuanto se estudiarán los sistemas
actuales de monitoreo y visualización, para conocer cuán eficiente son y así
poder mejorar, a fin de lograr un diseño lo suficientemente eficaz que permita
recolectar datos esenciales para el manteminiento, visualizacion y monitoreo
de los parámetros en los cuales el motor debe funcionar y hacer que el
sistema tenga una respuesta de desconexión al momento de una falla.
9
Universidad Rafael Urdaneta
Esta
investigación
Zulia Towing and Barge CO. C.A
también
ofrece
información
valiosa
para
demostrarles a los propietarios de lanchas de pasajeros y otras
embarcaciones, que unas de las mayores causas de fallas destructivas en
estas embarcaciones es por falta de un sistema de monitoreo y visualización
eficiente capaz de indicar precisamente las anomalías de funcionamiento de
los motores marinos.
El resultado de este Trabajo Especial de Grado contribuye a la
planificación de las actividades relacionadas con las mencionadas lanchas de
pasajeros ya que este sistema a diseñar, tiene la capacidad de almacenar las
horas de recorrido sirviendo esto para planificar labores de mantenimiento
que se traducen en reducir la tasa de fallas y darle una mejor vida al motor
S
O
D
A
V
ER
S
E
R
OS
para prevenir paradas indeseadas que a su vez se traducen en dinero
H
DEREC
perdido a la empresa.
1.5 Delimitación de la investigación.
1.5.1 Delimitacion espacial.
Esta investigación será llevada a cabo en el muelle de la
empresa Zulia Towing and Barge Co. C.A. ubicada en el puerto de
Maracaibo en la Av. Libertador a la altura del tecnológico Unir.
10
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
1.5.2 Delimitación temporal.
El siguiente estudio va a ser realizado en el lapso comprendido
entre el mes de Julio del 2005 hasta Abril del 2006.
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
11
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
CAPITULO II
MARCO TEORICO
2.1 Antecedentes.
“DESARROLLO
DE
UN
SISTEMA
PROTOTIPO
DE
MONITOREO
REMOTO DEL CONSUMO DE GASOLINA EN ESTACIONES DE
SERVICIOS”. Universidad Rafael Urdaneta. Maracaibo. Edo. Zulia, 2005.
APARICIO SÁNCHEZ, RAÚL. LABARCA CÓRDOVA, DANIEL.
“DISEÑO DE UN SISTEMA DE DESARROLLO PARA PROTOTIPOS
BASADOS EN EL MICROPROCESADOR 8086 DE INTEL” Universidad
S
O
D
A
V
ER
S
E
R
S JOSE. PEÑATE, HENRIQUEZ
PEÑATE HENRIQUEZ,
DAVID
O
H
C
E
DER
CAROLINA.
Rafael Urdaneta. Maracaibo. Edo. Zulia 2005.
MARTA
2.2 Reseña histórica.
Zulia Towing and Barge Co. C.A. empresa operando desde 1957, en el
mercado de transporte marítimo con una flota propia, compuesta por once
remolcadores, dos barcazas y ocho lanchas, totalmente repotenciados, los
cuales han venido prestando servicio a través de los años en forma regular y
12
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
permanente en los distintos puertos y terminales portuarios del país:
petroleros y comerciales, entre ellos: Puerto de Maracaibo, Bajo Grande, La
Salina, Puerto Miranda, Puerto de la Guaira y Puerto Cabello.
El objeto social de la compañía es la compraventa, importación,
exportación, construcción, reparación y arrendamiento de todo tipo de
gabarras, remolcadores y naves, así como de sus equipos y partes;
operaciones marítimas de todas clases, tales como: el remolque,
arrendamiento de equipos marítimos, construcciones navales, reparaciones
de nave y cualquier otra clase de operación marítima, lacustre o fluvial;
importar, exportar, comprar, vender, arrendar y de cualquier otro modo
comercial con bienes muebles e inmuebles; hipotecar, gravar; dar y tomar en
S
O
D
A
V
ER
S
E
R
OS
prenda los mismos bienes y en general realizar toda clase de operaciones.
RECH
E
D
Por muchos años se han atendido los requerimientos de la industria
petrolera en la atención de los tanqueros que atracan y desatracan en los
principales muelles petroleros y petroquímicos del país, así como a los
diferentes buques de carga comercial, atendido por las Agencias Navieras en
general, destacándose también por el liderazgo que se ha asumido por la
asistencia que brinda a buques petroleros varados o encallados, reflotados
con éxito por los remolcadores.
13
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Como referencia de una gran experiencia en esta actividad pueden dar
fé los principales clientes, tales como la industria petrolera nacional e
internacional PDVSA, Shell, Noble Drilling, Maersk, Foramer, entre otras, y
en general todas las agencias navieras que operan en el país.
Además de una completa flota, la empresa cuenta con una planta
física de aproximadamente 1.200 M2, donde dispone de los talleres para las
labores de mantenimiento y servicios de las unidades, así como un almacén
con un inventario para atender los requerimientos de servicios básicos y
necesarios de las unidades, lo cual da una infraestructura que permite la
ejecución de la operaciones de una manera eficiente y oportuna.
2.3 Bases Teóricas.
S
O
D
A
V
ER
S
E
R
OS
RECH
E
D
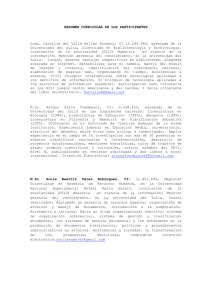
2.3.1. Motor de combustión.
Un motor de combustión interna es (ver Fig. 2.1) cualquier tipo
de máquina bien sea a gasolina o diesel, que obtiene energía
mecánica directamente de la energía química producido por un
combustible que arde dentro de una cámara de combustión, la parte
principal de un motor.
14
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 2.1 Motor diesel Mitsubishi modelo S6B3-MPTK
Fuente: http://www.midif.fr/marine-propulsion-engines_1000_s6b3.htm
2.3.1.1 Funcionamiento del motor de combustión.
La carga de combustible se enciende después de introducida o
forzada en el cilindro. La combustión resultante aumenta la presión en
el interior del cilindro y separa el pistón de las culatas.
S
O
D
A
V
Ea R
A medida que el pistón E
vuelve
su posición inicial cerca de las
S
R
S
HdeOla combustión salen por las lumbreras de escape
C
E
R
culatas,
los
gases
E
D
a presión más baja y los gases residuales son expulsados.
El motor de gasolina y los motores diesel, convierten el calor del
combustible en energía mecánica dentro del cilindro y difieren entre sí
por su índice de compresión, que es la relación entre los volúmenes
que ocupa el aire en la cámara al principio y al final de la carrera de
compresión.
15
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Mientras que los motores de gasolina no suelen sobrepasar una
relación de compresión de 7:1, los Diesel pueden tener una relación
de compresión de 16:1, pues no tienen el problema de que se pueda
producir una combustión prematura ya que se inyecta el gasoil al final
de la carrera del pistón.
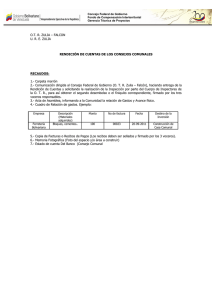
El ciclo de un motor diesel (ver Fig. 2.2) de cuatro tiempos se
puede describir de la siguiente manera, en el primer tiempo el émbolo
realiza la admisión (1) durante la cual se llena el cilindro de aire, luego
comienza el segundo tiempo que es la compresión (2), aumentando la
presión por el consiguiente aumento de temperatura, el combustible es
inyectado al final de la compresión, teóricamente a partir del instante
S
O
D
A
V
ER
S
E
R
S a presión constante, es necesario alcanzar
combustión (3) se
realiza
O
H
C
E
DER
una temperatura de 700ºC a 800ºC, para producir auto ignición del
en que el émbolo llega a su PMS, prácticamente un poco antes. La
combustible generalmente constituido por residuos provenientes de la
destilación del petróleo (fuel-oil, diesel-oil ). La presión inicial en la
aspiración es de una atmósfera y la final alcanza 45 atmósferas. Una
vez terminada la combustión comienza la expansión de él, que dura
hasta que el émbolo llega al PMI. En el cuarto tiempo (4) tiene lugar la
expansión de los gases quemados.
Fuente: http://html.rincondelvago.com/el-motor-diesel_1.html
16
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 2.2 Ciclo de funcionamiento del motor diesel.
Fuente: http://www.mecanica.ufrgs.br/mmotor/4tempos.jpg
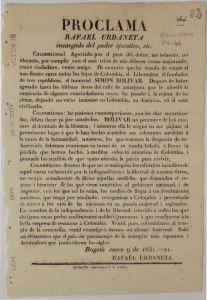
2.3.1.2. Partes del Motor Diesel.
a) El bloque: Es la estructura básica del motor (ver Fig. 2.3), en
S
O
D
A
V
R en él.
Todas las demás partes del motor
seE
montan
S
E
R
S
O
H
C
E
DER
el mismo van alojados los cilindros, cigüeñal, árbol de levas, etc.
Generalmente son de fundición de hierro o aluminio y pueden
llevar los cilindros en línea o en forma de V. Lleva una serie de
aberturas o alojamientos donde se insertan los cilindros, varillas de
empuje del mecanismo de válvulas, conductos del refrigerante, los
ejes de levas, apoyos de los cojinetes de bancada y en la parte
superior lleva unos taladros donde se sujeta el conjunto de culata.
Fuente: http://members.fortunecity.es/100pies/mecanica/partes.htm
17
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 2.3 Bloque del motor diesel Mitsubishi modelo S6B3-MPTK
Fuente: Luis E Garcia V. 2005
b) Cigüeñal: Es el componente mecánico que cambia el
movimiento alternativo en movimiento rotativo (ver Fig. 2.4 y 2.5). Está
montado en el bloque en los cojinetes principales los cuales están
lubricados.
S
O
D
A
V
ER
S
E
R
OS
ECHse puede considerar como una serie de pequeñas
DEElRcigüeñal
manivelas, una por cada pistón. El radio del cigüeñal determina la
distancia que la biela y el pistón puede moverse. Dos veces este radio
es la carrera del pistón.
Podemos distinguir las siguientes partes:
•
Muñequillas de apoyo o de bancada.
18
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
•
Muñequillas de bielas.
•
Manivelas y contrapesos.
•
Platos y engranajes de mando.
•
Taladros de engrase.
Una muñequilla es la parte de un eje que gira en un cojinete.
Las muñequillas de bancada ocupan la línea axial del eje y se apoyan
en los cojinetes de bancada del bloque. Las muñequillas de biela son
excéntricas con respecto al eje del cigüeñal. Van entre los contrapesos
y su excentricidad e igual a la mitad de la carrera del pistón. Por cada
muñequilla de biela hay dos manivelas.
S
O
D
A
V
ER
S
E
R
extremo lleva forjado
yS
mecanizado en el mismo cigüeñal el plato de
O
H
C
E
DER
anclaje del volante y en el otro extremo va el engranaje de distribución
Los motores en V llevan dos bielas en cada muñequilla; en un
que puede formar una sola pieza con él o haber sido mecanizado por
separado y montado luego con una prensa. Algunos cigüeñales llevan
un engranaje de distribución en cada extremo para mover los trenes
de engranajes de la distribución.
Otra particularidad del cigüeñal es una serie de taladros de
engrase. Tiene practicados los taladros, para que pase el aceite desde
19
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
las muñequillas de biela a las de bancada. Como al taladrar quedan
esos orificios en los contrapesos, se cierran con tapones, que se
pueden quitar para limpiar dichos conductos.
Fuente: http://members.fortunecity.es/100pies/mecanica/partes.htm
Figura 2.4 Cigüeñal del motor.
Fuente: http://members.fortunecity.es/100pies/mecanica/partes.htm
S
O
D
A
V
c) Culata: Es el elemento del
motor
ERque cierra los cilindros por la
S
E
R
S
O
H
C
E
parteEsuperior
D R (ver Fig. 2.6). Pueden ser de fundición de hierro o
aluminio. Sirve de soporte para otros elementos del motor como son:
Válvulas, balancines, inyectores, etc. Lleva los orificios de los tornillos
de apriete entre la culata y el bloque, además de los de entrada de
aire por las válvulas de admisión, salida de gases por las válvulas de
escape, entrada de combustible por los inyectores, paso de varillas de
empujadores del árbol de balancines, pasos de agua entre el bloque y
la culata para refrigerar, etc.
20
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 2.5 Vista interna de las bielas del motor Mitsubishi S6B6-MPTK
Fuente: Luis E Garcia V. 2006
c) Culata: Es el elemento del motor que cierra los cilindros por la
parte superior (ver Fig. 2.6). Pueden ser de fundición de hierro o
aluminio. Sirve de soporte para otros elementos del motor como son:
Válvulas, balancines, inyectores, etc. Lleva los orificios de los tornillos
S
O
D
A
V
ERde gases por las válvulas de
Ssalida
E
aire por las válvulas deS
admisión,
R
HO
C
E
R
E
D entrada de combustible por los inyectores, paso de varillas de
escape,
de apriete entre la culata y el bloque, además de los de entrada de
empujadores del árbol de balancines, pasos de agua entre el bloque y
la culata para refrigerar, etc.
Entre la culata y el bloque del motor se monta una junta que
queda prensada entre las dos a la que llamamos habitualmente junta
de culata.
Fuente: http://members.fortunecity.es/100pies/mecanica/partes.htm
21
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 2.6 Culata
Fuente: http://members.fortunecity.es/100pies/mecanica/partes.htm
d) Pistones: El pistón (ver Fig. 2.7) es un cilindro abierto por su
base inferior, cerrado en la superior y sujeto a la biela en su parte
intermedia. El movimiento del pistón es hacia arriba y abajo en el
S
O
D
A
V
combustión al cigüeñal a través
deE
laR
biela, fuerza la salida de los
S
E
R
S
HdeOla combustión en la carrera de escape y produce
C
E
R
gases
resultantes
E
D
interior del cilindro, comprime la mezcla, transmite la presión de
un vacío en el cilindro que “aspira” la mezcla en la carrera de
aspiración.
El pistón, que a primera vista puede parecer de las piezas mas
simples, ha sido y es una de las que ha obligado a un mayor estudio.
Debe ser ligero, de forma que sean mínimas las cargas de inercia,
pero a su vez debe ser lo suficientemente rígido y resistente para
22
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
soportar el calor y la presión desarrollados en el interior de la cámara
de combustión.
Fuente: http://www.automotriz.net/tecnica/pistones.html
Figura 2.7 Pistón Mitsubishi modelo S6B3-MPTK
S
O
D
A
V
ER
S
E
R
OS
Fuente: Luis E García V. 2006
H
DEREC
2.3.1.3. Especificaciones técnicas de motor Mitsubishi tipo S6B3MPTK.
Para especificaciones técnicas (ver Tabla 2.1).
23
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Tabla 2.1 Datos técnicos del motor Mitsubishi S6B3-MPTK
Tipo
Salida
Inyección
Numero de
cilindros
Calibre
X
golpe
Desplazamiento
total
Sistema
de
arranque
Peso
seco
S6B3MPTK
270Kw120rpm
Directa
6 cilindros
en línea
135x170
mm
14.6 litros
24 Volt
Con tierra
flotante
MPTK
1530Kg
Fuente: http://www.midif.fr/marine-propulsion-engines_1000_s6b3.htm
2.3.2. Sensores.
Los sensores son un componente crucial en cualquier máquina.
Los sensores entregan información sobre la máquina y el ambiente en
el cual está interactuando, al sistema de monitoreo de la máquina y de
esta manera según los resultados que arroje podríamos saber el
S
O
D
A
V
ER
S
E
R
OS
estado de funcionamiento de la máquina.
H
DEREC
Existen diversos tipos de sensores como:
a) Sensor de temperatura.
b) Sensor de velocidad.
c) Sensor de presión.
Entre otros.
24
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
2.3.3. Sistema Eléctrico de la Lancha (Tiburón III Modelo 1992,
fabricada por INAVEN C.A. perteneciente a la empresa ZULIA TOWING
AND BARGE Co. C.A.
Ver Figura 2.8.
Figura 2.8 Sistema eléctrico de la lancha Tiburón lll
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Fuente: Manual de operación y servicio Mitsubishi
25
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
2.3.4. Tarjeta Electrónica Conversora (Análogo-Digital).
La conversión analógica-digital se hará con un PIC.
2.3.4.1 PIC.
Se denomina PIC (ver Fig. 2.9) o microcontrolador a un
dispositivo programable capaz de realizar diferentes actividades que
requieran del procesamiento de datos digitales, del control y
comunicación digital de diferentes dispositivos. Los microcontroladores
poseen una memoria interna que almacena dos tipos de datos; las
instrucciones, que corresponden al programa que se ejecuta, y los
S
O
D
A
V
ER
S
E
R
el S
control de las diferentes funciones
O
registros, es decir, los datos que el usuario maneja, así como registros
paraH
E
DER C
especiales
microcontrolador.
Figura 2.9 Microcontrolador 18F459
Fuente: MICROSHIP. PIC18FXX8 Data Sheet.
26
del
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Los microcontroladores se programan en Assembler y cada
microcontrolador varía su conjunto de instrucciones de acuerdo a su
fabricante y modelo. De acuerdo al número de instrucciones que el
microcontrolador maneja se le denomina de arquitectura (ver Fig. 2.9)
RISC (reducido) o CISC (complejo).
Figura 2.10 Diagrama de bloque del Microcontrolador 18F459
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Fuente: MICROSHIP. PIC18FXX8 Data Sheet.
27
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Los microcontroladores poseen principalmente una ALU (Unidad
Lógico Aritmética), memoria del programa, memoria de registros, y
pines I/O (entrada y/0 salida). La ALU es la encargada de procesar los
datos dependiendo de las instrucciones que se ejecuten (ADD, OR,
AND), mientras que los pines son los que se encargan de comunicar al
microcontrolador con el medio externo; la función de los pines puede
ser de transmisión de datos, alimentación de corriente para l
funcionamiento de este o pines de control especifico.
Fuente:http://www.todomicro.com/trabajos18/descripcionpic/descripcion-pic.shtml
a)Señal analógica.
S
O
D
A
V
ER
S
E
R
OS
CH analógica (ver Fig. 2.11) es aquella en la que los
REeléctrica
DESeñal
valores de la tensión o voltaje varían constantemente en forma de
corriente alterna, incrementando su valor con signo eléctrico positivo
(+) durante medio ciclo y disminuyéndolo a continuación con signo
eléctrico negativo (–) en el medio ciclo siguiente.
El cambio constante de polaridad de positivo a negativo
provoca que se cree un trazado en forma de onda senoidal.
28
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura. 2.11 Onda senoidal alterna con una frecuencia de 3 Hz (hertz)
Fuente: http://www.asifunciona.com/electronica/af_conv_ad/conv_ad_2.htm
b)Señal digital.
Se dice que una señal es digital (ver Fig. 2.12) cuando las
magnitudes de la misma se representan mediante valores discretos en
lugar de variables continuas.
S
O
D
A
V
ER
S
E
R
S como por ejemplo el ordenador, usan
O
Los sistemas
digitales,
H
C
E
DER
lógica de dos estados: la corriente pasa o no, por los componentes
electrónicos del sistema. Estos dos estados son en realidad dos
niveles de tensión, uno alto, H y otro bajo, L (de High y Low,
respectivamente, en inglés). Por abstracción, dichos estados se
sustituyen por ceros y unos, lo que facilita la aplicación de la lógica y la
aritmética binaria. Si el nivel alto se representa por 1 y el bajo por 0, se
habla de lógica positiva y en caso contrario de lógica negativa.
29
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Cabe mencionar que además de los niveles, en una señal
digital están las transiciones de alto a bajo o de bajo a alto,
denominadas flanco de subida o de bajada, respectivamente. En la
siguiente figura se muestra una señal digital donde se identifican los
niveles y los flancos.
Figura. 2.12 Señal digital
Fuente: http://es.wikipedia.org/wiki/Se%C3%B1al_digital
S
O
D
A
V
ER
S
c)Memoria Eprom.
E
R
S
O
H
C
E
DER
Este tipo de memoria es similar a la PROM con la diferencia
que la información se puede borrar y volver a grabar varias veces. Su
nombre proviene de la sigla en inglés Erasable Read Only Memory.
La programación se efectúa aplicando en un pin especial de la
memoria una tensión entre 10 y 25 Voltios durante aproximadamente
50 ms, según el dispositivo, al mismo tiempo se direcciona la posición
30
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
de memoria y se pone la información a las entradas de datos. Este
proceso puede tardar varios minutos dependiendo de la capacidad de
memoria.
La
memoria
EPROM,
tal
como
las
memorias
vistas
anteriormente se compone de un arreglo de transistores MOSFET de
Canal N de compuerta aislada
2.3.5. Software Controlador.
El software controlador es un programa realizado especialmente
para una aplicación específica de acuerdo a las necesidades del
producto.
S
O
D
A
V
ER
S
E
R
OS
RECH
DEEste
programa
o software controlador esta creado en un
determinado lenguaje por un programa especial para programar, ya
terminado el software controlador, permitirá una comunicación clara,
exacta, en tiempo real e instantánea entre el sistema y el operador
para poder lograr un desempeño al máximo del producto a controlar.
Fuente: Luis E García V. 2006
31
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
2.3.6. Interfase.
La interfase es la etapa de relación entre el usuario y el sistema
diseñado.
2.4 Definición de términos básicos.
a) Lancha de pasajeros.
Las lanchas de transporte de personal (ver fig. 2.12) son
embarcaciones que constan de numerosos asientos para trasladar
personal.
S
O
D
A
V
ER
S
E
R
OS
Figura 2.13 Lancha de Pasajeros (Tiburon III)
H
DEREC
Fuente: Luis E García V. 2006
b) Convertidor de señales.
Para convertir una señal analógica en digital (ver Fig. 2.13), el
primer paso consiste en realizar un muestreo (sampling) de ésta, o lo
32
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
que es igual, tomar diferentes muestras de tensiones o voltajes en
diferentes puntos de la onda senoidal. La frecuencia a la que se
realiza el muestreo se denomina razón, tasa o también frecuencia de
muestreo y se mide en kilo/hertz (Khz.).
b) Software.
Se refiere a todas las aplicaciones o programas que se
encuentran funcionando en cualquier equipo computacional o de
comunicación. (Fuente: http://www.mekate.com/glosario-s.html)
c) Presión.
S
O
D
A
V
SER
E
R
La presión puedeS
definirse
como una fuerza por unidad de área
HO
C
E
R
E
oD
superficie, en donde para la mayoría de los casos se mide
directamente por su equilibrio directamente con otra fuerza conocida,
que puede ser la de una columna líquida, un resorte, un embolo
cargado con un peso, un diafragma cargado con un resorte ó cualquier
otro elemento que puede sufrir una deformación cualitativa cuando se
le aplica la pres
ión. Fuente: http://es.wikipedia.org/wiki/presion
33
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
d) Temperatura.
La temperatura es una magnitud física descriptiva de un sistema
que caracteriza la transferencia de energía térmica, o calor, entre ese
sistema y otros. Fuente: http://es.wikipedia.org/wiki/Temperatura
f) Revoluciones o RPM.
Es una unidad de frecuencia, usada frecuentemente para medir
la velocidad angular. En este contexto, una revolución es una vuelta
de una rueda, un eje, un disco o cualquier cosa que gire. Fuente:
http://es.wikipedia.org/wiki/Revoluciones_por_minuto
g) ALU.
S
O
D
A
V
ER
S
E
R
OS
ECH
DESeRdenomina
Unidad Aritmético-Lógica (UAL) o ALU (Arithmetic
and logical unit) a la unidad incluida en la CPU encargada de realizar
operaciones aritméticas y lógicas sobre operandos que provienen de
la memoria principal y que pueden estar almacenados de forma
temporal en algunos registros de la propia unidad. Fuente:
http://es.wikipedia.org/wiki/ALU
34
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
2.5 Mapa de variable.
Objetivo General. Diseñar e implementar un sistema de monitoreo y
visualización digital de las señales análogas emitidas por los motores
marinos Mitsubishi tipo S6B3-MPTK instalados en la lancha Tiburón III
modelo 1992 fabricada por Inaven C.A. pertenecientes a la empresa Zulia
Towing and Barge Co C.A.
Objetivo
Variable
Definición de
variable
Indicadores
Estudiar el
sistema de
monitoreo y
visualización
original de los
motores
marinos
Mitsubishi tipo
S6B3-MPTK
instalados en la
lancha Tiburón
III modelo 1992
fabricada por
Inaven C.A.
pertenecientes
a la empresa
Zulia Towing
and Barge Co.
C.A.
Sistema de
monitoreo y
visualización
original de los
motores
marinos
Mitsubishi tipo
S6B3-MPTK
Se define como
el sistema que
posee la
lancha para
poder saber los
parámetros de
funcionamiento
durante su uso.
Funcionamiento
del sistema de
monitoreo y
visualización
Técnica de
recolección
de datos
Observación
documental.
Observación
directa.
Temperatura
Presión
Nivel de
combustible
S
O
D
A
V
ER
S
E
R
OS
Presión de
aceite.
H
DEREC
35
Fase
Fase l
Universidad Rafael Urdaneta
Diseñar una
tarjeta
electrónica para
la conversión
de las señales
análogas a
digital emitidas
por lo motores
marinos
Mitsubishi tipo
S6B3-MPTK de
la lancha
Tiburón III
modelo 1992
fabricada por
Inaven C.A.
pertenecientes
a la empresa
Zulia Towing
and barge Co.
C.A.
Tarjeta
electrónica
para la
conversión de
las señales
análogas a
digital
emitidas por
lo motores
marinos
Mitsubishi tipo
S6B3-MPTK
Zulia Towing and Barge CO. C.A
Esta tarjeta
permite la
conversión de
señales de
analógicas a
digital para ser
llevados a la
unidad
procesadora.
Resultados de
pruebas de
nivel de
corriente y
voltaje.
Resultados de
pruebas
Observación
documental
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
36
Fase ll
Universidad Rafael Urdaneta
Elaborar un
software para la
comunicación
entre el sistema
convertidor de
señales
emitidas por los
motores
marinos
Mitsubishi tipo
S6B3-MPTK y
la unidad
procesadora
(CPU) a ser
instalada en la
lancha Tiburón
III modelo 1992
fabricada por
Inaven C.A.
perteneciente a
la empresa
Zulia Towing
and Barge Co.
C.A.
Software para
la
comunicación
entre el
sistema
convertidor de
señales
emitidas por
los motores
marinos
Mitsubishi tipo
S6B3-MPTK
Zulia Towing and Barge CO. C.A
Programa
creado para
lograr la
comunicación
entre las
señales
digitales con la
unidad
procesadora y
también
permite la
visualización
de los
parámetros de
funcionamiento
de los motores
Mitsubishi tipo
S6B3-MPTK
Necesidad de
visualizar las
señales
digitales
provenientes
del convertidor
de señales
análogas digital.
Observación
directa
Observación
documental
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
37
Fase lll
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Desarrollar una
interfase entre
el usuario y el
sistema de
monitoreo y
visualización
digital a instalar
en la lancha
Tiburón III
modelo 1992
fabricada por
Inaven C.A.
perteneciente a
la empresa
Zulia Towing
and Barge Co.
C.A..
Interfase
entre el
usuario y el
sistema de
monitoreo y
visualización
digital
Esta permite la
interacción
entre el usuario
y el sistema de
monitoreo y
visualización
Necesidad de
involucrar al
usuario del
sistema de
monitoreo y
visualización
con dicho
sistema.
Observación
directa.
Implementar el
prototipo
del
sistema
de
monitoreo
y
visualización
digital diseñado
para la lancha
Tiburón
III
modelo
1992
fabricada
por
Inaven
C.A.
perteneciente a
la
empresa
Zulia
Towing
and Barge Co.
C.A.
Sistema de
monitoreo y
visualización
diseñado para
los motores
marinos
Mitsubishi tipo
S6B3-MPTK
Se define como
el sistema que
posee la
lancha para
poder saber los
parámetros de
funcionamiento
durante su uso
Funcionamiento
del sistema de
monitoreo y
visualización
Observación
documental.
Observación
documental
Observación
directa.
S
O
D
A
V
Presión
ER
S
E
R
OS
H
DEREC
Temperatura
Nivel de
combustible
Presión de
aceite.
38
Fase lV
Fase V
Universidad Rafael Urdaneta
Elaborar un
manual de
usuario para el
sistema de
monitoreo y
visualización
digital a
instalar en la
lancha Tiburón
III modelo 1992
fabricada por
Inaven C.A.
perteneciente a
la empresa
Zulia Towing
and Barge Co.
C.A.
Manual de
usuario para
el sistema de
monitoreo y
visualización
digital
Zulia Towing and Barge CO. C.A
Maual de
usuario donde
explique como
funciona el
sistema
diseñado.
Interpretación
sobre el uso del
sistema a
instalar en la
lancha Tiburón
III
Observación
documental
Entrevistas no
estructuradas
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
39
Fase Vl
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
CAPÍTULO III
MARCO METODOLÓGICO
En el marco metodológico se refieren las técnicas y procedimientos
metodológicos que se tomaron en cuenta para la realización de esta
investigación.
3.1 Tipo de investigacion.
De acuerdo a la opinión de Hernández, Fernández y Baptista, el
proposito del investigador es describir situaciones y eventos. Esto es, decir
como es y como se manifestara determinado fenomeno. “Los estudios
S
O
D
A
V
ER
S
E
R
del fenómeno o fenómenos
aS
investigar” (1991, pág. 60). Esta investigación,
O
H
C
E
DER
descriptivos miden o evalúan diversos aspectos, dimensiones o componentes
según el nivel de conocimiento, se compagina con lo señalado por dichos
autores, dado que está dirigida a detallar las características de temperatura,
presión de aceite, entre otras, que definen las particularidades de
funcionamiento requeridas en los motores marinos Mitsubishi tipo S6B3MPTK instalados en la lancha Tiburon III modelo 1992 fabricada por inaven
C.A. perteneciente a la empresa Zulia Towing and Barge Co. C.A.
40
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
“La investigación aplicada se le denomina activa o dinámica, y es
aquella que depende de sus descubrimientos y aportes teóricos para el
estudio y aplicación de la investigación a problemas concretos, en
circunstancias y características concretas” (Tamayo y Tamayo. 1997, pág.
51). Según su propósito, la presente investigación es aplicada, ya que utiliza
las características específicas que definen el funcionamiento de los motores
marinos Mitsubishi tipo S6B3-MPTK instalados en la lancha Tiburon III, y así
resolver los problemas que pudiesen perturbar la operación de éstos.
3.2- Diseño de la investigación.
La
investigación
se
puede
definir
como
no
experimental
y
S
O
D
A
V
ER
S
E
R
refiere, a aquella donde
se S
observan los fenómenos tal y como ocurren
O
H
C
E
DER
transeccional. Al hacer mención de una investigación no experimental se
naturalmente, sin intervenir en su desarrollo y sin construir ninguna situación
provocada intencionalmente.
“Los diseños transeccionales recolectan datos en un solo momento,
en un tiempo único. Su propósito es describir variables, y analizar su
incidencia e interrelación en un momento dado” (Hernández Sampieri 1991,
pág. 191).
41
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
El presente Trabajo Especial de Grado consiste en el monitoreo y
visualización de un grupo de variables en los motores marinos Mitsubishi tipo
S6B3-MPTK de la lancha Tiburón III, la conversión de señales de analógicas
a digital de los motores marinos Mitsubishi tipo S6B3-MPTK de la lancha
Tiburón III, desarrollar una interfase entre el usuario y el sistema de
monitoreo y visualización digital a instalar en la lancha Tiburón III modelo
1992.
3.3.
Técnicas de Recolección de Datos.
Entre las técnicas de recolección de datos utilizaremos las siguientes.
S
O
D
A
V
ER
S
E
R
OS
3.3.1- Observación documental.
ECH
DELaRobservación
documental y metódica, fundamentalmente, se
basa en el establecimiento previo de las variables empíricas y las
categorías sobre las que se necesita recoger información. Una vez
establecidas las variables y categorías se examinan sistemáticamente
los documentos, con el fin de encontrar los datos contenidos en ellos
referentes a cada categoría. La finalidad pretendida es ver si los
documentos prueban o no las hipótesis formuladas (Sierra 1996, pág.
368).
42
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
La observación documental para el presente Trabajo Especial
de Grado, se basa en el establecimiento de las variables y categorías,
mediante un proceso de observación de bibliografía y revisión de
documentos técnicos relacionados con los tópicos bajo investigación.
“La finalidad pretendida es ver si los documentos prueban o no
las hipótesis formuladas” (Sierra. 1996, pág. 368).
La observación documental, además de constituir una base
sobre la realidad del problema, es un complemento indispensable de
los demás medios de observación, donde se tiene como punto de
partida las anteriores investigaciones realizadas de tipo similar, que se
S
O
D
A
V
ER
S
E
R
OS
constituyen como fuentes documentales.
RECH
E
D
3.3.2- Observación Directa.
“La observación directa es aquella técnica en la cual el
investigador puede observar y recoger datos mediante su propia
observación, apoyado en su sentido (conocimiento empírico)”
(Fuenmayor, Pereira, Risquez, pág. 1999).
43
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
En el presente Trabajo Especial de Grado, se presenta la
observación directa como una variable obligatoria para conocer el
estudiar el sistema de monitoreo y visualización original de los motores
marinos Mitsubishi tipo S6B3-MPTK instalados en la lancha Tiburón III
modelo 1992.
3.3.3- Entrevista no estructurada.
“La entrevista no estructurada es aquella donde, a través del
diálogo,
el
encuestador
obtiene
la
información
deseada,
sin
planificación alguna” (Méndez 2001, pág. 67).
S
O
D
A
V
ER
S
E
R
SZulia Towing and Barge Co. C.A.
que laboran a la H
empresa
O
C
E
DER
Se llevaron a cabo entrevistas no estructuradas a ingenieros
Se realizaron entrevistas al Capitán César Vicente, al igual que
al T.S.U. Yuris Sánchez, y así como a técnicos electricistas y
mecánicos que expusieron las características sistema de monitoreo y
visualización original de los motores marinos Mitsubishi tipo S6B3MPTK instalados en la lancha Tiburón III modelo 1992.
44
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
3.4- Procedimiento de la investigación.
Las actividades requeridas para la obtención de los objetivos
planteados en el presente Trabajo Especial de Grado se han dividido en
cinco fases.
3.5- Fases de la investigación:
Fase l.
Se estudiará el sistema de monitoreo y visualización original
evaluando el estado de los conductores, sensores de temperatura, presión
de aceite, entre otros y de partes relacionadas con dicho sistema de los
S
O
D
A
V
ER
S
E
R
OS
motores marinos Mitsubishi tipo S6B3-MPTK instalados en la lancha Tiburón
H
DEREC
III por medio de observación directa, documentación teórica y entrevistas no
estructuradas a los integrantes del cuerpo de electricistas de la empresa
Zulia Towing Co. C.A., y así poder emitir resultados del estado de dicho
sistema original.
Fase ll.
En la segunda fase de esta investigacion se diseñará una tarjeta
electrónica para la conversión de las señales análogas a digital emitidas por
45
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
los motores marinos Mitsubishi tipo S6B3-MPTK de la lancha Tiburón III
modelo 1992 fabricada por Inaven C.A. pertenecientes a la empresa Zulia
Towing and barge Co. C.A.. Esta tarjeta electrónica convertidora de señales
se diseñará bajo teorías y criterios electrónicos según las condiciones y/o
valores nominales de las señales emitidas por los motores a estudiar.
Fase III.
Se elaborará un conjunto de software (dos) especialmente para la
comunicación entre el sistema convertidor de señales emitidas por los
motores marinos Mitsubishi tipo S6B3-MPTK y la unidad procesadora (CPU)
a ser instalada en la lancha Tiburón III modelo 1992 fabricada por Inaven
C.A. perteneciente a la empresa Zulia Towing and Barge Co. C.A. El software
S
O
D
A
V
ER
S
E
R
S programar y realizar programas específicos
Borland, software utilizado
para
O
H
C
E
DER
madre
se realizará en lenguaje C y compilado en C++ Builder 6.0 de
para cualquier aplicación que en este caso se utilizaría para la comunicación
y permitirá la visualización de las señales en forma cuantitativa a través de
la pantalla del computador.
También se programará el microcontrolador
(PIC) ubicado en la tarjeta convertidora de señales el cual trabajará en
conjunto con el programa madre en la unidad procesadora (CPU) para
mostrar los datos por pantalla.
46
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Fase lV.
Se desarrollará una interfase entre el usuario y el sistema de
monitoreo y visualización digital a ser instalado en la lancha Tiburón III
modelo 1992 fabricada por Inaven C.A. perteneciente a la empresa Zulia
Towing and Barge Co. C.A. Esta interfase estará compuesta por la
visualización de las señales ya procesadas por los software traducidas en
imágenes y mostradas en la pantalla de la unidad procesadora (CPU) en la
cual se muestra la información procesada en forma cuantitativa.
Fase V.
Se Implementará el sistema de monitoreo y visualización digital
diseñado para la lancha Tiburón III modelo 1992 fabricada por Inaven C.A.
S
O
D
A
V
ER
S
E
R
OS
perteneciente a la empresa Zulia Towing and Barge Co. C.A.
RECH
E
D
Fase Vl.
En esta última fase se realizará el manual de usuario siguiendo una
metodología adecuada para su realización luego de haberse concluido y
estando funcionando el nuevo sistema implementado.
47
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
CAPÍTULO IV
ANÁLISIS DE LOS RESULTADOS
En el presente capítulo se plasmarán los resultados obtenidos de los
estudios realizados para cada uno de los objetivos planteados en éste trabajo
especial de grado.
4.1. Sistema de monitoreo y visualización original de los motores
marinos Mitsubishi tipo S6B3-MPTK.
El sistema de monitoreo actual de la embarcación es un sistema
análogo constituido por un:
S
O
D
A
V
ER
S
E
R
Spara medir las revoluciones del motor (ver
a. Tacómetro: Utilizado
O
H
C
E
ER4.1) expresadas en minutos (RPM), y este modelo de
DFig.
tacómetro posee un contador de horas trabajadas para dicho
motor.
48
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 4.1 Reloj de revoluciones del motor
Fuente: Manual de operación y mantenimiento
b. Medidor de servicio: Este indica el total de número de horas que
el motor ha operado (ver Fig. 4.2). Este medidor es un dispositivo
completamente mecánico y no se encuentra en el panel de control
de la embarcación.
Figura 4.2 Medidor de servicio.
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Fuente: Manual de operación y mantenimiento
c. Medidor de presión de aceite: Este indica la presión de aceite del
motor (ver Fig. 4.3):
49
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
-. La lectura máxima es normalmente inmediata después
que arranca el motor.
-. Después que el motor ha calentado, la lectura debe ser
4 a 5 KgF/cm2 (57 a 92 PSI), eso es cuando el aceite del
motor es sae Nº 30.
-. La lectura será menor a baja velocidad de vació que a
velocidad normal.
-. Si la lectura es menor que 3 KgF/cm2 (43 PSI) a una
velocidad rateada, o si es menor que 1 KgF/cm2 (14 PSI) a
una velocidad de vacio baja, inmediatamente se detiene la
operaciond del motor mediante un dispositivo eléctrico
llamado Switch para caída de presión de aceite, el cual activa
S
O
D
A
V
ER
S
E
R
S
el suministro H
de combustible,
apagando el motor.
O
C
E
DER
un solenoide conocido como parada de emergencia cortando
Figura 4.3 Medidor de presión de aceite.
Fuente: Manual de operación y mantenimiento
50
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
d. Medidor de temperatura de agua: Indica la temperatura del
refrigerante (ver Fig. 4.4). Normalmente la temperatura será entre 65 ºC
a 85 ºC (149 ºF a 185 ºF) cuando la temperatura exterior es de 20 ºC a
30 ºC (68 ºF a 86 ºF). A este medidor está asociado un dispositivo
eléctrico que se activa cuando la temperatura del refrigerante se eleva,
llamado termo-switch de elevación de temperatura, que a su vez está
asociado a un solenoide (ver Fig. 4.5) conocido como parada de
emergencia que corta el suministro de combustible al motor cuando la
temperatura se eleva más de lo normal.
Figura 4.4 Reloj de temperatura de agua.
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Fuente: Manual de operación y mantenimiento
Figura 4.5 Solenoide. (Parada de emergencia)
Fuente: Luís E García V. 2005
51
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
e. Amperímetro: Este dispositivo se encuentra en serie con el
banco de baterias, para indicar si las mismas están siendo
cargada o descargada (ver Fig. 4.6).
-. El indicador está normalmente en la zona de carga ( en el
lado positivo del cero) cuando la bateria está siendo cargada.
-. A medida que la batería está cargada completamente, el
indicador permanecerá ligeramente en el rango del cero o
centro.
Figura 4.6 Amperímetro de la embarcación
S
O
D
A
V
ER
S
E
R
OS
H
Fuente: Manual de operación y mantenimiento.
DEREC
4.2. Se diseñará una tarjeta electrónica para la conversión de las
señales análogas a digital emitidas por los motores marinos Mitsubishi
tipo S6B3-MPTK de la lancha Tiburón III.
La tarjeta convertidora (ver fig. 4.7) está ensamblada
sobre un
protoboard, y está compuesta por un microcontrolador (PIC) modelo 18F458
52
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
(ver tabla 4.1), un MAX232 (ver fig.4.8), un cristal de 20MHZ, pulsadores,
resistencias, capacitores y diodos.
Figura 4.7 Diagrama circuital de la tarjeta convertidora.
S
O
D
A
V
EVR
S
Fuente: Luís E
García
2006.
E
R
S
O
H
DEREC
El microcontrolador está programado para que convierta las señales
analógicas arrojada por los sensores, luego las convierta en digitales, las
compare con los rangos máximos y mínimos de las alarmas de cada uno de
los sensores y luego agregar esas lecturas en la computadora por medio del
puerto serial. A medida que ocurre esto, realiza un conteo para indicarle al
usuario la cantidad de minutos y horas que ha estado el motor en
53
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
funcionamiento para tener control del trabajo realizado por el motor, y así
poder hacer un mantenimiento preventivo para alargar la vida del motor.
Tabla 4.1 Especificaciones del PIC 18F458.
Fuente: MICROSHIP. PIC18FXX8 Data Sheet.
El MAX232 es un componente utilizado para convertir los niveles RS232 (cerca de +10 y -10 V) a voltaje TTL ( 0 a +5 V ) y viceversa. El chip
contiene dos drivers TTL-->RS-232 y dos RS-232-->TTL y necesita cuatro
S
O
D
A
V
internamente. El circuito integrado MAX232E
cambia
R los niveles TTL a los del
S
E
R
S una transmisión, y cambia los niveles RSO
H
C
estándar RS-232
cuando
se
hace
E
DER
condensadores externos de 0.1uF para generar el voltaje RS-232
232 a TTL cuando se tiene una recepción.
54
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 4.8 Estructura interna del MAX232
Fuente: Manual MAXIM DEVICES MAX232
4.3. Software para la comunicación entre el sistema convertidor de
S
O
D
A
V
la unidad procesadora (CPU) a ser instalada
ERen la lancha Tiburón III.
S
E
R
S
O
H
C
E
DER
señales emitidas por los motores marinos Mitsubishi tipo S6B3-MPTK y
El software para la comunicación entre el sistema convertidor de
señales y la unidad procesadora (CPU) es una combinación de software que
trabajan en conjunto.
55
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
4.3.1. Programa del microcontrolador (PIC).
El microcontrolador (PIC) integrante principal de la tarjeta
convertidora de señales está programado para que lea las señales
analógicas de los sensores, luego las convierta en digitales, las
compare con los rangos máximos y mínimos de las alarmas de cada
uno de los sensores y luego envíe esas lecturas hacia la computadora
por medio del puerto serial. A medida que ocurre esto, realiza un
conteo para indicarle al usuario la cantidad de minutos y horas que ha
estado el motor encendido.
El programa del microcontrolador se puede dividir de la
S
O
D
A
V
ER
S
E
R
S
parte se le indica
al
microcontrolador
que se utilizará el módulo de
O
H
C
E
DER
puerto serial o USART, se le configuran las entradas y salidas,
siguiente manera: primero se configura el microcontrolador, en esta
también como funcionarán los A/D y el contador TIMER1. Luego se
inicia la parte principal del programa en donde se leen los A/D para
obtener las lecturas de los sensores, en esta parte además se
comparan las lecturas con los rangos de alarma de los sensores y al
mismo tiempo se inicia el conteo del TIMER1 que se utiliza para hacer
el conteo de los minutos que han transcurrido desde que el motor fue
encendido.
56
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
4.3.1.1. Explicación de los procedimientos y funciones
En esta parte se explican cada uno de los procedimientos y
funciones utilizadas en el programa del microcontrolador.
4.3.1.1.1. Configuración del programa
Aquí se configura al microcontrolador para que tenga 5 entradas
A/D, se configura el funcionamiento del módulo de A/D y su velocidad
de muestreo, luego se activan las interrupciones y se establecen como
únicas interrupciones las del puerto serial y las del contador (TIMER1),
además se configuran los puertos de E/S indicando cuáles pines serán
S
O
D
A
V
ER
S
E
R
S y por último se inicializan las variables a
TIMER1 y sus características
O
H
C
E
DER
ser utilizadas y el TIMER1.
entradas y cuáles serán salidas, luego se configura la velocidad del
4.3.1.2. Programa Principal
Este es la parte del programa en donde se revisa si el motor
está encendido y de ser así el microcontrolador está programado para
empezar el conteo del TIMER1 y de que tome las lecturas de los A/D y
las envíe con su correspondiente número de identificación y además
57
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
compare los valores resultantes de las lecturas de los A/D con los
valores de máximos y mínimos que pueden tener las variables para
bloquear el envío de combustible al motor. Esta parte del programa
siempre está corriendo, es decir, está en un bucle que no termina
hasta que se reinicie el microcontrolador o hasta que este se apague
(el microcontrolador).
LecturaAD
Este es el procedimiento que es llamado en el Programa Principal
para que realice las lecturas de los A/D.
EnvDato
S
O
D
A
V
ER
S
E
R
S
del microcontrolador al H
computador.
O
C
E
DER
Procedimiento encargado de enviar datos por medio del puerto serial
EnvMinu, EnvMinu2, EnvMinu3, EnvMinu4
Procedimientos encargados de enviar la cantidad de minutos
transcurridos desde que se encendió el motor. Cada uno envía un byte de los
4 bytes que se utilizan para hacer el conteo de los minutos.
58
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Interrupciones
Estas ocurren al llegar el TIMER1 a FFFFh; el TIMER1 es el contador
utilizado para hacer el conteo de los minutos que ha estado encendido el
motor. Para realizar este conteo, se configuró el microcontrolador para que el
TIMER1 interrumpiera el programa del microcontrolador cada vez que
pasaran
100
mili-segundos
desde
la
última
interrupción.
En
este
procedimiento se cuentas hasta 10 de estas interrupciones para incrementar
el conteo en un segundo, luego de que pasen 60 segundos se incrementan
los minutos; en esta parte se envían los 4 bytes de los minutos hacia la
computadora, es decir cada vez que pasa un minuto se le envían al
computador los minutos que han trascurrido desde que fue encendido el
motor.
S
O
D
A
V
ER
S
E
R
OS
RECH
E
D
Además, en este procedimiento se llama al procedimiento GuarEnviar
que guarda los segundos y minutos del conteo en 5 direcciones de la
memoria EEPROM del microcontrolador.
En este procedimiento se envían 4 veces los bytes de los minutos;
esto es para que no ocurra un error a la hora de mostrar en el computador
los minutos y horas trascurridos desde el encendido del motor. Esta
transmisión ocurre después de que se incrementaron los minutos y cada una
59
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
de las veces que se envían los 4 bytes tiene una separación de 300 minutos
entre cada transmisión.
GuardarEEPROM
Se encarga de guardar los datos que se encuentran en la variable
DatoGrabar, en una dirección que está dada por la variable DirecGrabar.
Este dato es almacenado en la memoria EEPROM del microcontrolador.
LeerEEPROM
Este procedimiento lee el contenido de una dirección de la memoria
EEPROM y lo carga en W. La dirección de la cual se va a leer debe cargarse
en W antes de llamar al procedimiento.
S
O
D
A
V
ER
S
E
R
OS
RECH
E
D
GuarEnviar
Se utiliza para guardar los segundos y los bytes de los minutos en la
memoria EEPROM y además llama a los procedimientos EnvMinu,
EnvMinu2, EnvMinu3, EnvMinu4 que se encargan de enviar los bytes de
los minutos.
60
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
BorrarMemoria
Llena de 00h las direcciones de las memoria EEPROM donde se
guardan los bytes de los minutos. Estas direcciones son desde la 00h para el
Byte No. 4 de los minutos hasta la 04h en donde se guardan los segundos.
RevisaAlarma
Aquí se revisa si las lecturas de las variables (Combustible,
Temperatura, Presión de aceite) son normales o han pasado los valores
máximos y mínimos suficientes para que se cierre el flujo de combustible al
motor.
PDelay, PDelay2
en
elOS
programa del
D
A
V
R
SEde 2 y 5 mili-segundos
E
R
S
microcontrolador. Estos
retardos
son
HO
C
E
R
E
D
respectivamente.
Son
utilizados
para
hacer
retardos
Líneas del Programa del PIC.
************************* Configuración del PIC ******************************
Inicio
Movlw b'00000001'
Movwf ADCON0
;Registro
Movlw b'10000010'
;Se configura los A/D
61
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Movwf ADCON1
;Registro
Bcf
RCON,IPEN
;Desabilita las prioridades de las interrupciones
Movlw b'11000000'
Movwf INTCON
;Interrupciones
Clrf
INTCON2
;Interrupciones
Clrf
INTCON3
;Interrupciones
Movlw b'00100001'
;Se habilita las interrupciones en el bit 7
;Habilitación de las interrupciones de la
recepción del USART y del OF de TMR1
Movwf PIE1
Clrf
PIE2
Clrf
PIE3
Movlw 2fh
;Al colocar un bit en 1 se coloca el pin
como entrada
Movwf TRISA
Clrf
TRISB
Movlw b'11011100'
Movwf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
;Se coloca los pines 6, 7 del puerto C con
1 para que se pueda utilizar el USART y
el pin 4 como entrada
TRISC
TRISD
TRISE
LATA
LATB
LATC
LATD
LATE
PORTA
PORTB
PORTC
PORTD
PORTE
H
DEREC
S
O
D
A
V
ER
S
E
R
OS
Movlw b'00000100'
;Registro para la configuración de Uart
Movwf TXSTA
Movlw d'129'
;Registro que se utiliza en la velocidad
(Puerto Serial)
del Uart (9600 bps)
Movwf SPBRG
Movlw b'10010000'
Movwf RCSTA
Movlw
;Registro para la configuración de Uart
07h
;Se apaga el modulo de comparación
analogica
Movwf CMCON
62
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Movlw 34h
;Contador utilizado para el conteo de los
minutos y segundos
;Se inicializa la parte baja del TIMER1
Movwf
Movlw
Movwf
Movlw
Movwf
TMR1L
0dh
TMR1H
b'00110000'
T1CON
Clrf
ADRESH
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
ADRESL
EECON1
ParteAltaDato
ParteBajaDato
NumAD
ContaMilSeg
EstadoEnvio
DirecGrabar
DatoGrabar
ValorMaxAlarma
ValorMinAlarma
BajaDatoARevisar
AltaDatoARevisar
Movlw
;Se inicializa la parte alta del TIMER1
;Se configura el TIMER1
;Se inicializan en cero las variables donde
se guardan valores
04h
;Se cargan los segundos guardados en la
memoria EEPROM
S
O
D
A
V
carga el primer byte de los minutos
ER;Seguardados
S
E
R
en la memoria EEPROM
OS
Call
LeerEEPROM
Movwf ContaSeg
Movlw
03h
Call
LeerEEPROM
CHByteMin1
DEREMovwf
Movlw 02h
;Se carga el segundo byte de los minutos
guardados en la memoria EEPROM
Call
LeerEEPROM
Movwf ByteMin2
Movlw
01h
;Se carga el tercero byte de los minutos
guardados en la memoria EEPROM
Call
LeerEEPROM
Movwf ByteMin3
Movlw
00h
;Se carga el cuarto byte de los minutos
guardados en la memoria EEPROM
Call
LeerEEPROM
Movwf ByteMin4
Bsf
T1CON,TMR1ON
;Se inicia el conteo de los minutos y
segundos al iniciar el funcionamiento del TIMER1
63
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
;************************* Inicio del programa ****************************
IniLectura
Btfsc
MotorEnce
Bsf
PORTC,4
;Se revisa si el motor esta encendido
Goto
MotorEnce
Bcf
T1CON,TMR1ON
Btfss PORTC,3
Goto
IniLectura
Btfss PORTC,2
Goto
IniLectura
Call
BorrarMemoria
Goto
IniLectura
T1CON,TMR1ON
ADCON0
10h
NumAD
ADCON0,0
LecturaAD
Clrf
Movlw
Movwf
Bsf
Call
Clrf
ADCON0
Movlw 08h
Iorwf
ADCON0,F
Movlw
20h
;A/D No.1 (RPM)
;Se llama al procedimiento LecturaAD
;A/D No.2 (Gasolina)
;Se le indica al PIC que se va a usar el
A/D No.2
;El numero del A/D que se va a enviar
por el puerto serial
Movwf NumAD
Bsf
ADCON0,0
Call
LecturaAD
S
O
D
A
V
ER;A/D No.3 (Temperatura)
S
E
R
ADCON0
OS
H
DEREC
Clrf
Movlw 10h
Iorwf
ADCON0,F
Movlw 30h
;Se le indica al PIC que se va a usar el
A/D No.3
;El numero del A/D que se va a enviar
por el puerto serial
Movwf NumAD
Bsf
ADCON0,0
Call
LecturaAD
;
Movlw 00h
;
;
;
;
Movwf
Movlw
Movwf
Call
ValorMaxAlarma
00h
ValorMinAlarma
RevisaAlarma
Clrf
ADCON0
Movlw 18h
;A/D No.4 (Presión de aceite)
64
Universidad Rafael Urdaneta
Iorwf
Zulia Towing and Barge CO. C.A
ADCON0,F
;Se le indica al PIC que se va a usar el
A/D No.4
;El numero del A/D que se va a enviar
por el puerto serial
Movlw 40h
Movwf NumAD
Bsf
ADCON0,0
Call
LecturaAD
;
;
;
;
;
Movlw
Movwf
Movlw
Movwf
Call
00h
ValorMaxAlarma
00h
ValorMinAlarma
RevisaAlarma
Clrf
ADCON0
Movlw 20h
Iorwf ADCON0,F
;A/D No.5 (Voltios)
;Se le indica al PIC que se va a usar el
A/D No.5
;El numero del A/D que se va a enviar
por el puerto serial
Movlw 50h
Movwf NumAD
Bsf
ADCON0,0
Call
LecturaAD
Goto
IniLectura
;-----------------------------------------------------------------------------
S
O
D
A
V
ER
S
E
R
OS
;--------------------------- Procedimiento LecturaAD -----------------------Bsf
ADCON0,2
CHPDelay
Call
DEREBtfsc
ADCON0,2
LecturaAD
Bucle1
Bucle2
Bucle3
Goto
Bucle1
Call
Call
PDelay2
PDelay2
Call
Btfsc
Goto
ADCON0,2
PDelay
ADCON0,2
Bucle2
Call
Call
PDelay2
PDelay2
Call
Btfsc
ADCON0,2
PDelay
ADCON0,2
Bsf
Bsf
;Revisa si ya se hizó la lectura A/D
;Revisa si ya se hizó la lectura A/D
;Revisa si ya se hizó la lectura A/D
65
Universidad Rafael Urdaneta
Goto
;
;
Bucle3
Movff
ADRESL,ParteBajaDato
Movff
ADRESH,ParteAltaDato
Movlw
Cpfseq
Goto
Movlw
Movwf
NoCero
Zulia Towing and Barge CO. C.A
Bsf
00h
ParteBajaDato
NoCero
01h
ParteBajaDato
PORTC,5
;Se activa el pin C5 para indicarle a la
computadora que se va a enviar un dato
;7 ms
Call
Call
Bcf
PDelay2
PDelay
Movf
Andlw
Iorwf
Call
ParteAltaDato,W
03h
NumAD,W
EnvDato
Bsf
Call
Bcf
Bsf
Movf
Call
PORTC,5
;Se desactiva el pin C5
PORTC,5
PDelay2
;5 ms
PORTC,5
EstadoEnvio,0
;Se coloca el estado del envio en 1
para que no ocurran interrupciones del
contador.
S
O
D
A
V
ParteBajaDato,W SER
EnvDato
OS RE
H
DEREBcfC EstadoEnvio,0
Call
;Carga la parte baja de la lectura A/D
en la variable ParteBajaDato
;Carga la parte alta de la lectura A/D
en la variable ParteAltaDato
PDelay2
;Se coloca en 0 el estado de envio del
puerto
;5 ms
Movff ParteBajaDato,BajaDatoARevisar
Movff ParteAltaDato,AltaDatoARevisar
Clrf
Clrf
Clrf
Clrf
Clrf
Return
ADRESH
ADRESL
ParteAltaDato
ParteBajaDato
NumAD
;-------------------------------------------------------------------------
66
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
;------------------------------ Enviar Dato -----------------------------EnvDato
DatoNoEnv
Btfss
Bcf
T1CON,TMR1ON
Bcf
INTCON,GIE
Bsf
TXSTA,TXEN
Movwf TXREG
Nop
PIR1,TXIF
Goto
DatoNoEnv
Bsf
INTCON,GIE
Bsf
T1CON,TMR1ON
Return
;-------------------------------------------------------------------------
;---------------------- Procedimientos de los minutos -------------------EnvMinu
;
;
Bsf
PORTC,5
;Envío el Byte 1 de los min
Call
PDelay2
Call
PDelay
Bcf
PORTC,5
Movlw 00h
Cpfseq ByteMin1
Goto
NoCeroMin4
Movlw 90h
Call
EnvDato
Bsf
PORTC,5
Call
PDelay2
Bcf
PORTC,5
Movlw 01h
Call
EnvDato
Return
Movlw 0d0h
Call
EnvDato
Bsf
PORTC,5
Call
PDelay2
Bcf
PORTC,5
Movf ByteMin1,W
Call
EnvDato
Call
PDelay2
Return
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
NoCeroMin4
;
;
;7 ms
EnvMinu2
Bsf
PORTC,5
;Envío el Byte 2 de los min
67
;5 ms
;5 ms
;5 ms
Universidad Rafael Urdaneta
;
;
NoCeroMin3
;
;
Call
Call
Bcf
Movlw
Cpfseq
Goto
Movlw
Call
Bsf
Call
Bcf
Movlw
Call
Return
Movlw 0c0h
Call
Bsf
Call
Bcf
Movf
Call
Call
Return
Zulia Towing and Barge CO. C.A
PDelay2
PDelay
;7 ms
PORTC,5
00h
ByteMin2
NoCeroMin3
80h
EnvDato
PORTC,5
PDelay2
PORTC,5
01h
EnvDato
EnvDato
PORTC,5
PDelay2
PORTC,5
ByteMin2,W
EnvDato
PDelay2
;5 ms
;5 ms
;5 ms
EnvMinu3
Bsf
PORTC,5
;Envío el Byte 3 de los min
Call
PDelay2
Call
PDelay
Bcf
PORTC,5
Movlw 00h
Cpfseq ByteMin3
Goto
NoCeroMin2
Movlw 70h
Call
EnvDato
Bsf
PORTC,5
Call
PDelay2
Bcf
PORTC,5
Movlw 01h
Call
EnvDato
Return
Movlw 0b0h
Call
EnvDato
Bsf
PORTC,5
Call
PDelay2
Bcf
PORTC,5
Movf ByteMin3,W
Call
EnvDato
Call
PDelay2
S
O
D
A
V
ER
S
E
R
OS
;7 ms
H
DEREC
;
;
NoCeroMin2
;
;
68
;5 ms
;5 ms
;5 ms
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Return
EnvMinu4
;
;
NoCeroMin1
;
;
Bsf
PORTC,5
;Envío el Byte 4 de los min
Call
PDelay2
Call
PDelay
Bcf
PORTC,5
Movlw 00h
Cpfseq ByteMin4
Goto
NoCeroMin1
Movlw 60h
Call
EnvDato
Bsf
PORTC,5
Call
PDelay2
Bcf
PORTC,5
Movlw 01h
Call
EnvDato
Return
Movlw 0a0h
Call
EnvDato
Bsf
PORTC,5
Call
PDelay2
Bcf
PORTC,5
Movf ByteMin4,W
Call
EnvDato
Call
PDelay2
Return
;7 ms
;5 ms
;5 ms
;5 ms
S
O
D
A
V
;---------------------------------------------------------------------------ER
S
E
R
S
O
H
C
E
ER
D
;---------------------------- Interrupciones -------------------------------Inter
Bcf
Btfsc
Goto
Bsf
Bsf
Retfie
;
DesborConta
Bcf
Bcf
Incf
Movf
Sublw
Bz
Movlw
Movwf
Movlw
INTCON,GIE
PIR1,TMR1IF
DesborConta
INTCON,GIE
T1CON,TMR1ON
T1CON,TMR1ON
PIR1,TMR1IF
ContaMilSeg,F
ContaMilSeg,W
0ah
OtroSeg
34h
TMR1L
0dh
69
;Contador de 10 ms.
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Movwf TMR1H
Incf
TMR1L,F
Incf
TMR1L,F
Movlw 00h
;Revisa si ya ocurrio un conteo de los min
Cpfseq ContaSeg
Goto
SinEnvio
Movf ContaMilSeg,W
Sublw 03h
;Revisa si pasaron 300 ms despues del conteo de los min
Bz
SegundoNo1
Movf ContaMilSeg,W
Sublw 06h
;Revisa si pasaron 600 ms despues del conteo de los min
Bz
SegundoNo1
Movf ContaMilSeg,W
Sublw 09h
;Revisa si pasaron 900 ms despues del conteo de los min
Bz
SegundoNo1
Incf
TMR1L,F
SinEnvio
Bsf
INTCON,GIE
Bsf
T1CON,TMR1ON
Retfie
SegundoNo1
Bsf
T1CON,TMR1ON
Btfsc EstadoEnvio,0
Retfie
Call
EnvMinu
; Aqui se envian los bytes de los minutos
Call
EnvMinu2
Call
EnvMinu3
Call
EnvMinu4
Bsf
INTCON,GIE
Retfie
S
O
D
A
V
ER
S
E
R
OS
OtroSeg
CH
REContaMilSeg
DEClrf
Incf
ContaSeg,F
Movf
Sublw
Bz
Incf
Incf
Incf
Bsf
Bsf
Movlw
Movwf
Movff
Call
Retfie
;
OtroMin
Clrf
;Contador de 60 s.
ContaSeg,W
3ch
OtroMin
TMR1L,F
TMR1L,F
TMR1L,F
INTCON,GIE
T1CON,TMR1ON
04h
DirecGrabar
ContaSeg,DatoGrabar
GuardarEEPROM
ContaSeg
Movf ByteMin1,W
;Contador del 1er. bytes de los min
70
Universidad Rafael Urdaneta
OtraMin1
Clrf
OtraMin2
Clrf
Zulia Towing and Barge CO. C.A
Sublw 0ffh
Bz
OtraMin1
Incf
ByteMin1,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Bsf
T1CON,TMR1ON
Btfsc EstadoEnvio,0
Retfie
Call
GuarEnviar
Retfie
ByteMin1
;Contador del 2do. bytes de los min
Movf ByteMin2,W
Sublw 0ffh
Bz
OtraMin2
Incf
ByteMin2,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Bsf
T1CON,TMR1ON
Btfsc EstadoEnvio,0
Retfie
Call
GuarEnviar
Retfie
ByteMin2
;Contador del 3er. bytes de los min
Movf ByteMin3,W
Sublw 0ffh
Bz
OtraMin3
Incf
ByteMin3,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Incf
TMR1L,F
Bsf
T1CON,TMR1ON
Btfsc EstadoEnvio,0
Retfie
Call
GuarEnviar
Retfie
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
OtraMin3
Clrf
ByteMin3
;Contador del 4to. bytes de los min
Incf
ByteMin4,F
Bsf
T1CON,TMR1ON
Btfsc EstadoEnvio,0
Retfie
Call
GuarEnviar
Retfie
71
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
;-------------------------------------------------------------------------
;--------------------------- Guardar EEPROM -----------------------------GuardarEEPROM
SinGrabar
Btfsc
Movff DatoGrabar,EEDATA
; Data Memory Value to write
Movff DirecGrabar,EEADR
; Data Memory Address to read
BCF
EECON1,EEPGD
; Point to DATA memory
BCF
EECON1,CFGS
; Access program FLASH or Data EEPROM
memory
BSF
EECON1,WREN
; Enable writes
BCF
INTCON,GIE
; Disable interrupts
MOVLW
55h
MOVWF
EECON2
; Write 55h
MOVLW
0AAh
MOVWF
EECON2
; Write AAh
BSF
EECON1,WR ; Set WR bit to begin write
BSF
INTCON,GIE ; Enable interrupts
EECON1,WR
Goto
SinGrabar
BCF
EECON1,WREN
Return
S
O
D
A
V
ER
S
E
R
OS
;-------------------------------------------------------------------------
H
DEREC
;--------------------------- Leer EEPROM --------------------------------LeerEEPROM
MOVWF
EEADR
BCF
EECON1, EEPGD
BCF
EECON1, CFGS
BSF
EECON1, RD
MOVF EEDATA, W
;Data Memory Address to read
;Point to DATA
;EEPROM Read
;W = EEDATA
Return
;-------------------------------------------------------------------------
;------------------------ Guardar y Enviar minutos ----------------------GuarEnviar
72
Universidad Rafael Urdaneta
Movlw
Movwf
Movff
Call
Movlw
Movwf
Movff
Call
Movlw
Movwf
Movff
Call
Movlw
Movwf
Movff
Call
Movlw
Movwf
Movff
Call
Call
Call
Call
Bsf
Return
Zulia Towing and Barge CO. C.A
00h
DirecGrabar
ByteMin4,DatoGrabar
GuardarEEPROM
01h
DirecGrabar
ByteMin3,DatoGrabar
GuardarEEPROM
02h
DirecGrabar
ByteMin2,DatoGrabar
GuardarEEPROM
03h
DirecGrabar
ByteMin1,DatoGrabar
GuardarEEPROM
04h
DirecGrabar
ContaSeg,DatoGrabar
EnvMinu
EnvMinu2
EnvMinu3
EnvMinu4
INTCON,GIE
;-------------------------------------------------------------------------
S
O
D
A
V
ER
S
E
R
OS
;------------------------------ Borrar memoria --------------------------Movlw
CH00h
DirecGrabar
DEREMovwf
Movlw 00h
BorrarMemoria
Movwf
Call
Movlw
Movwf
Movlw
Movwf
Call
Movlw
Movwf
Movlw
Movwf
Call
Movlw
Movwf
Movlw
Movwf
DatoGrabar
GuardarEEPROM
01h
DirecGrabar
00h
DatoGrabar
GuardarEEPROM
02h
DirecGrabar
00h
DatoGrabar
GuardarEEPROM
03h
DirecGrabar
00h
DatoGrabar
73
Universidad Rafael Urdaneta
Call
Movlw
Movwf
Movlw
Movwf
Call
Clrf
Clrf
Clrf
Clrf
Clrf
Clrf
Return
Zulia Towing and Barge CO. C.A
GuardarEEPROM
04h
DirecGrabar
00h
DatoGrabar
GuardarEEPROM
ContaMilSeg
ContaSeg
ByteMin1
ByteMin2
ByteMin3
ByteMin4
;-------------------------------------------------------------------------
;----------------------- Revisa activación de alarma --------------------RevisaAlarma
RevisaMin
SinAlarma
Movf
Bcf
Movf AltaDatoARevisar,W
Cpfslt ValorMaxAlarma
Goto
RevisaMin
Bsf
PORTC,1
Return
BajaDatoARevisar,W
Cpfsgt ValorMinAlarma
Goto
SinAlarma
Bsf
PORTC,1
Return
PORTC,1
Return
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
;-------------------------------------------------------------------------
;------------------------------ Delay 2ms -------------------------------PDelay
PLoop1
PLoop2
PDelL1
PDelL2
movlw .8
movwf
movlw .249
movwf
clrwdt
clrwdt
decfsz
goto
decfsz
goto
goto
PDelL2
clrwdt
return
; 1 set number of repetitions (B)
;1|
; 1 set number of repetitions (A)
PDel1
;1|
; 1 clear watchdog
; 1 cycle delay
PDel1, 1 ; 1 + (1) is the time over? (A)
PLoop2
; 2 no, loop
PDel0,1
; 1 + (1) is the time over? (B)
PLoop1
; 2 no, loop
; 2 cycles delay
; 1 cycle delay
; 2+2 Done
PDel0
74
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
;-------------------------------------------------------------------------
;-------------------------------- Delay 5 ms ----------------------------PDelay2
PLoop12
PLoop22
PDelL12
PDelL22
movlw .44
movwf
movlw
movwf
clrwdt
decfsz
goto
decfsz
goto
goto
clrwdt
return
PDel0
.141
PDel1
PDel1,1
PLoop22
PDel0,1
PLoop12
PDelL22
; 1 set number of repetitions (B)
;1|
; 1 set number of repetitions (A)
;1|
; 1 clear watchdog
; 1 + (1) is the time over? (A)
; 2 no, loop
; 1 + (1) is the time over? (B)
; 2 no, loop
; 2 cycles delay
; 1 cycle delay
; 2+2 Done
;------------------------------------------------------------------------
;------------------------------ Delay 50 ms ----------------------------PDelay3 movlw .197
movwf PDel0
PLoop13 movlw .253
movwf PDel1
PLoop23 clrwdt
clrwdt
decfsz PDel1, 1
goto PLoop23
decfsz PDel0, 1
goto PLoop13
PDelL13 goto PDelL23
PDelL23
return
; 1 set number of repetitions (B)
;1|
; 1 set number of repetitions (A)
;1|
; 1 clear watchdog
; 1 cycle delay
; 1 + (1) is the time over? (A)
; 2 no, loop
; 1 + (1) is the time over? (B)
; 2 no, loop
; 2 cycles delay
; 2+2 Done
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
;----------------------------------------------------------------------org
0xF00000
Datos
Dw
00h, 00h, 00h, 00h, 00h
End
75
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
4.3.2. Programa C++
4.3.2.1. Explicación del programa completo
El programa fue realizado en lenguaje C++ y compilado en C++
Builder 6.0 de Borland. Este programa tiene la finalidad de obtener los
datos enviados por el microcontrolador por el puerto serial y realizar
algunas transformaciones para poder mostrar las lecturas realizadas
por los 5 A/D (analógico/digital) y también mostrar el conteo que se
realiza en el microcontrolador para contar la cantidad de minutos que
ha estado encendido el motor. Además se muestran las horas que
faltan para el siguiente servicio o en su caso la cantidad de horas que
S
O
D
A
V
ER
S
E
R
S se le deben hacer al motor.
actividades y servicios
que
O
H
C
E
DER
se ha sobrepasado el uso del motor y al ocurrir esto se muestran las
Este programa también cuenta con un botón que se utiliza para
reiniciar el conteo de las horas de servicio, esto para que el conteo se
reinicie con otras 250 horas.
76
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
4.3.2.2. Explicación de los procedimientos y funciones
AbrirCOM
Inicia la conexión con el puerto serial del computador. Este
procedimiento inicia la conexión entre el programa y el puerto serial y
además configura su velocidad que es de 9600 baudios, el número del puerto
que se va a utilizar (COM1), la cantidad de Bit por byte a recibir, si se tiene
recibe con bit de paridad e inicializa algunas constantes de la velocidad de
respuesta del puerto en caso de una lectura o escritura.
CerrarCOM
Se encarga de cortar la conexión del programa con el puerto serial.
S
O
D
A
V
ER
S
E
R
OS
RECH
E
D
Lee los datos que han llegado al puerto serial por medio del pin RX. Al
LeerPuerto
llamar este procedimiento se lee lo que se encuentra en el puerto serial en
ese momento, al hacer esto se puede leer erróneamente un 00h ya que al no
recibir nada el puerto tiene siempre un 00h en su registro de entrada, para
corregir esto el microcontrolador siempre envía números diferentes de 00h.
77
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
GetDSR
Revisa qué valor está en el pin DSR del puerto serial y lo devuelve si
hay un 1 ó un 0.
SacarNumero
Procedimiento utilizado para convertir números hexadecimales en
números decimales.
ContadorHorasServicio
Este procedimiento toma el valor de los minutos guardados en el
archivo “Horas de Servicio.txt” en su primera línea, luego toma este valor y
lo convierte en un número entero, revisa si ya llegó a cero horas o si todavía
S
O
D
A
V
ER
S
E
R
S
regresiva se el resta 1H
a los
minutos y se guardan en el archivo si llegó a
O
C
E
DER
cero se incrementan los minutos y luego se guardan con 250 minutos de mas
está en la cuenta regresiva. En el caso de que todavía este en la cuenta
;
para que el programa los pueda diferenciar de la cuenta regresiva. Todos los
valores se convierten en horas y minutos para guardar el valor en de está
forma en el archivo.
Ejemplo:
1)
- Primera línea del archivo = 004:00
- Dato Entero = 240 minutos
78
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
- Se decrementa el dato entero ya que es menor de 15000 =
239 minutos
- Se convierte a horas y minutos y se guarda en el archivo =
003:59
2)
- Primera línea del archivo = 264:00
- Dato Entero = 15840 minutos
- Se incrementa el dato entero ya que es mayor de 15000 =
15841 minutos
- Se convierte a horas y minutos y se guarda en el archivo =
264:01
- Para mostrarlo en el programa se le resta 15000 al dato
S
O
D
A
V
ER
S
E
R
- Se muestra
de S
la siguiente forma: 014:01
O
H
C
E
DER
entero = 841 minutos
ImprimirNum
Este se encarga de mostrar las lecturas de los A/D y los minutos que
lleva encendido el motor, esto lo realiza descomponiendo el número enviado
por el microcontrolador y luego escogiendo en cuál de los A/D se va a
mostrar o si es algún minuto que se vaya a agregar.
79
Universidad Rafael Urdaneta
El
procedimiento
Zulia Towing and Barge CO. C.A
descompone
el
número
enviado
por
el
microcontrolador en dos números, el primero es el que identifica cuál A/D o
byte de los minutos es el que se va a modificar y el segundo número que se
descompuso es el valor de la lectura A/D o parte de los minutos. Luego de
esto el se encarga de mostrar por medio de algunos cálculos las lecturas A/D
o de unir los bytes enviados por el microcontrolador de los minutos y
mostrarlos en la pantalla.
THilo::Execute
Al ejecutar el hilo se llama a este procedimiento. Este se encarga de
leer el pin DSR. Al leer un 1 lógico en este pin el procedimiento empieza a
leer lo que esté en el puerto serial (eliminando cualquier lectura que arroje
S
O
D
A
V
ER
S
E
R
S qué función va a realizar el programa.
ImprimirNum para queH
especifique
O
C
E
DER
Este procedimiento siempre está en ejecución es decir dentro de un bucle
como resultado 00h). Luego de recibir dos bytes este llama al procedimiento
que no termina hasta que la variable EstadoLectura sea igual a true o hasta
que se cierre el programa.
Lineas del programa C++
HANDLE idComDev;
char *pcCommPort = "COM1";
bool EstadoLectura;
AnsiString SumaMinutosString, ByteMinutos1 = "00", ByteMinutos2 = "00", ByteMinutos3 =
"00", ByteMinutos4 = "00";
80
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
int MinutosAnteriores, SumaMinutosInt;
AnsiString SacarNumero(AnsiString NumHEX)
{
AnsiString VarConv;
VarConv = IntToStr(StrToInt("$" + NumHEX));
return VarConv;
}
bool AbrirCOM()
// Conecta al programa con el puerto serial
{
OVERLAPPED ov;
DCB dcb;
DWORD n;
bool fSuccess;
idComDev = CreateFile(pcCommPort,
GENERIC_READ | GENERIC_WRITE,
0, NULL, OPEN_EXISTING, 0, NULL); //FILE_FLAG_OVERLAPPED
if(idComDev == INVALID_HANDLE_VALUE)
{
ShowMessage("ERROR: ya inicio el puerto.");
return false;
}
fSuccess = GetCommState(idComDev, &dcb);
if(!fSuccess)
{
ShowMessage("ERROR");
return false;
}
dcb.BaudRate = 9600;
// Velocidad es de 9600 baudios
// dcb.BaudRate = 19200;
// set the baud rate
dcb.ByteSize = 8;
// data size, xmit, and rcv
dcb.Parity = NOPARITY;
// no parity bit
dcb.StopBits = ONESTOPBIT; // one stop bit
fSuccess = SetCommState(idComDev, &dcb);
if(!fSuccess)
{
ShowMessage("ERROR: SetCommStatus");
return false;
}
if(!SetCommMask(idComDev, EV_RXCHAR))
{
ShowMessage("No se pudo activar el evento de lectura.");
SetCommMask(idComDev, 0);
CloseHandle(idComDev);
return false;
}
COMMTIMEOUTS m_CommTimeouts;
BOOL m_bPortReady;
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
81
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
m_bPortReady = GetCommTimeouts (idComDev, &m_CommTimeouts);
m_CommTimeouts.ReadIntervalTimeout = 5;
m_CommTimeouts.ReadTotalTimeoutConstant = 5;
m_CommTimeouts.ReadTotalTimeoutMultiplier = 1;
m_CommTimeouts.WriteTotalTimeoutConstant = 5;
m_CommTimeouts.WriteTotalTimeoutMultiplier = 1;
m_bPortReady = SetCommTimeouts (idComDev, &m_CommTimeouts);
if (m_bPortReady == false)
{
}
ov.hEvent = CreateEvent(NULL, /* no security attributes */
FALSE, /* auto reset event */
FALSE, /* not signaled */
NULL /* no name */);
ov.hEvent = CreateEvent(NULL, /* no security attributes */
FALSE, /* auto reset event */
FALSE, /* not signaled */
NULL /* no name */);
assert(ov.hEvent);
ov.Offset = NULL;
ov.OffsetHigh = NULL;
return true;
}
void CerrarCOM() // Procedimiento que cierra el puerto transmisión serial
{
SetCommMask(idComDev, 0);
CloseHandle(idComDev);
}
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
int GetDSR()
{
DWORD Entrada;
GetCommModemStatus(idComDev, &Entrada);
return (Entrada & MS_DSR_ON) ? 1 : 0;
}
AnsiString LeerPuerto()
// Procedimiento para leer datos desde el puerto
{
DWORD dwBytesTransferred;
AnsiString DatoRecibido;
WORD arreglo[1];
arreglo[0] = 0;
int DatoInt;
DWORD dwEventMask;
DWORD dwIncommingReadSize;
ReadFile(idComDev,
82
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
&arreglo,
1,
&dwBytesTransferred,
NULL
);
DatoInt = arreglo[0];
DatoRecibido = IntToHex(DatoInt,2);
return DatoRecibido;
}
__fastcall THilo::THilo(bool CreateSuspended)
: TThread(CreateSuspended)
{
}
void THilo::SetName()
//Nombre del Hilo (thread)
{
THREADNAME_INFO info;
info.dwType = 0x1000;
info.szName = "Hilo1";
info.dwThreadID = -1;
info.dwFlags = 0;
__try
{
RaiseException( 0x406D1388, 0, sizeof(info)/sizeof(DWORD),(DWORD*)&info );
}
__except (EXCEPTION_CONTINUE_EXECUTION)
{
}
}
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
AnsiString Milisegundos()
{
AnsiString Temp1, Segundos, TiempoCompleto;
TDateTime Tiempo;
WORD Variable;
Tiempo = Time();
Variable = MilliSecondOf(Tiempo);
TiempoCompleto = TimeToStr(Tiempo);
VARTYPE CambioVar;
char TempChar;
CambioVar = Variable;
TempChar = TiempoCompleto[7];
Temp1 = TempChar;
TempChar = TiempoCompleto[8];
Segundos = Temp1 + TempChar+"."+CambioVar;
return Segundos;
83
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
}
void ContadorHorasServicio(AnsiString MinutosTrancurridos)
{
int DatoEntero, DatoEntero2;
AnsiString DatoTemp, DatoTemp2, DatoTemp3;
MinutosAnteriores = StrToInt(MinutosTrancurridos);
Form1->Memo1->Lines->LoadFromFile("Horas de Servicio.txt");
DatoTemp = Form1->Memo1->Lines->Strings[0];
DatoTemp3 = DatoTemp[1];
DatoTemp3 = DatoTemp3 + DatoTemp[2];
DatoTemp3 = DatoTemp3 + DatoTemp[3];
DatoTemp2 = DatoTemp[5];
DatoTemp2 = DatoTemp2 + DatoTemp[6];
DatoEntero = StrToInt(DatoTemp3)*60 + StrToInt(DatoTemp2);
if (DatoEntero <= 15000)
{
Form1->Label59->Caption = DatoTemp;
Form1->Label59->Font->Color = clNavy;
if ((DatoEntero != 0)&&(DatoEntero <= 15000))
DatoEntero = DatoEntero - 1;
else
if (DatoEntero == 0)
DatoEntero = 15001;
DatoTemp = IntToStr(DatoEntero%60);
if (DatoTemp.Length() == 1)
DatoTemp = "0" + DatoTemp;
DatoTemp2 = IntToStr(DatoEntero/60);
if (DatoTemp2.Length() == 1)
DatoTemp2 = "00" + DatoTemp2;
else
if (DatoTemp2.Length() == 2)
DatoTemp2 = "0" + DatoTemp2;
}
else
{
DatoEntero2 = DatoEntero;
DatoEntero2 = DatoEntero2 - 15000;
DatoTemp = IntToStr(DatoEntero2%60);
if (DatoTemp.Length() == 1)
DatoTemp = "0" + DatoTemp;
DatoTemp2 = IntToStr(DatoEntero2/60);
if (DatoTemp2.Length() == 1)
DatoTemp2 = "00" + DatoTemp2;
else
if (DatoTemp2.Length() == 2)
DatoTemp2 = "0" + DatoTemp2;
Form1->Label59->Font->Color = clRed;
Form1->Label59->Caption = DatoTemp2 + ":" + DatoTemp;
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
84
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
DatoEntero = DatoEntero + 1;
DatoTemp = IntToStr(DatoEntero%60);
if (DatoTemp.Length() == 1)
DatoTemp = "0" + DatoTemp;
DatoTemp2 = IntToStr(DatoEntero/60);
if (DatoTemp2.Length() == 1)
DatoTemp2 = "00" + DatoTemp2;
else
if (DatoTemp2.Length() == 2)
DatoTemp2 = "0" + DatoTemp2;
}
Form1->Memo1->Lines->Strings[0] = DatoTemp2 + ":" + DatoTemp;
Form1->Memo1->Lines->SaveToFile("Horas de Servicio.txt");
Form1->Memo1->Lines->Strings[0] = "SERVICIOS A REALIZAR.";
if (DatoEntero > 15000)
{
Form1->Memo1->Visible = true;
Form1->Label59->Font->Color = clRed;
}
else
Form1->Memo1->Visible = false;
}
void ImprimirNum(AnsiString DatoEnviado)
{
AnsiString DigitoTemp, DigitoTemp2, DatoFinal, DatoTemp, DatoTemp2, DatoTemp3,
MinutosTemp;
double DatoConDecimales = 0;
Variant VarCambio;
int DatoEntero, DatoEnteroTemp;
DigitoTemp = DatoEnviado[1];
DatoTemp = DatoEnviado[2];
DatoTemp = DatoTemp + DatoEnviado[3];
DatoTemp = DatoTemp + DatoEnviado[4];
DatoTemp2 = DatoEnviado[3];
DatoTemp2 = DatoTemp2 + DatoEnviado[4];
if (DigitoTemp == "1")
// RPM
{
DatoEnteroTemp = StrToInt(SacarNumero(DatoTemp));
if (DatoEnteroTemp < 144 )
DatoTemp = "00";
else
DatoTemp = IntToStr(StrToInt(SacarNumero(DatoTemp))-144);
DatoConDecimales = StrToInt(DatoTemp)*2.6166097838452787258248009101251;
VarCambio = DatoConDecimales;
DatoEntero = VarCambio;
if (DatoEntero < 5)
DatoEntero = 0;
Form1->Label1->Caption = IntToStr(DatoEntero);
Form1->ProgressBar1->Position = DatoEntero;
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
85
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
}
else
if (DigitoTemp == "2")
// Combustible
{
DatoEnteroTemp = StrToInt(SacarNumero(DatoTemp));
if (DatoEnteroTemp < 255 )
DatoTemp = "00";
else
DatoTemp = IntToStr(StrToInt(SacarNumero(DatoTemp))-255);
DatoConDecimales = StrToInt(DatoTemp)*1.5625;
VarCambio = DatoConDecimales;
DatoEntero = VarCambio;
if (DatoEntero <= 100)
Form1->Shape2->Brush->Color = clRed;
else
Form1->Shape2->Brush->Color = clWhite;
if (DatoEntero == 1)
{
DatoEntero = 0;
}
Form1->Label2->Caption = IntToStr(DatoEntero);
Form1->ProgressBar2->Position = DatoEntero;
}
else
if (DigitoTemp == "3")
// Temperatura
{
DatoEnteroTemp = StrToInt(SacarNumero(DatoTemp));
if (DatoEnteroTemp < 776 )
DatoTemp = "00";
else
DatoTemp = IntToStr(StrToInt(SacarNumero(DatoTemp))-764);
DatoConDecimales = StrToInt(DatoTemp)*0.35411764705882352941176470588235;
DatoConDecimales = DatoConDecimales + 35;
VarCambio = DatoConDecimales;
DatoTemp = VarCambio;
if (DatoConDecimales < 100)
{
if (DatoTemp.Length() > 2)
{
DigitoTemp2 = DatoTemp[2];
if ((DigitoTemp2 == ".")||(DigitoTemp2 == ","))
{
DatoFinal = "";
DatoFinal = DatoTemp[1];
DatoFinal = DatoFinal + DatoTemp[2];
DatoFinal = DatoFinal + DatoTemp[3];
DatoFinal = DatoFinal + DatoTemp[4];
}
else
{
DatoTemp = DatoTemp + "0";
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
86
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
DatoFinal = "";
DatoFinal = DatoTemp[1];
DatoFinal = DatoFinal + DatoTemp[2];
DatoFinal = DatoFinal + DatoTemp[3];
DatoFinal = DatoFinal + DatoTemp[4];
DatoFinal = DatoFinal + DatoTemp[5];
}
}
else
DatoFinal = DatoTemp + ",00";
}
else
{
if (DatoConDecimales <= 110)
{
DatoTemp = DatoTemp + "0";
DatoFinal = "";
DatoFinal = DatoTemp[1];
DatoFinal = DatoFinal + DatoTemp[2];
DatoFinal = DatoFinal + DatoTemp[3];
DatoFinal = DatoFinal + DatoTemp[4];
DatoFinal = DatoFinal + DatoTemp[5];
DatoFinal = DatoFinal + DatoTemp[6];
}
else
DatoFinal = "110,00";
}
VarCambio = DatoFinal;
DatoEntero = VarCambio;
if (DatoEntero > 90)
Form1->Shape4->Brush->Color = clRed;
else
Form1->Shape4->Brush->Color = clWhite;
Form1->Label3->Caption = DatoFinal;
Form1->ProgressBar3->Position = DatoEntero/1;
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
}
else
if (DigitoTemp == "4")
// Presión de aceite
{
DatoEnteroTemp = StrToInt(SacarNumero(DatoTemp));
if (DatoEnteroTemp < 256 )
DatoTemp = "00";
else
DatoTemp = IntToStr(StrToInt(SacarNumero(DatoTemp))-249);
DatoConDecimales = (StrToInt(DatoTemp)*0.0390625);
if (DatoConDecimales < 15.01)
Form1->Shape3->Brush->Color = clRed;
else
Form1->Shape3->Brush->Color = clWhite;
if (DatoConDecimales > 29.6)
VarCambio = 100;
87
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
else
VarCambio = DatoConDecimales + 70;
DatoTemp = VarCambio;
if (DatoTemp != "100")
{
if (DatoTemp.Length() > 2)
{
DigitoTemp2 = DatoTemp[2];
if ((DigitoTemp2 == ".")||(DigitoTemp2 == ","))
{
DatoFinal = "";
DatoFinal = DatoTemp[1];
DatoFinal = DatoFinal + DatoTemp[2];
DatoFinal = DatoFinal + DatoTemp[3];
DatoFinal = DatoFinal + DatoTemp[4];
}
else
{
DatoTemp = DatoTemp + "0";
DatoFinal = "";
DatoFinal = DatoTemp[1];
DatoFinal = DatoFinal + DatoTemp[2];
DatoFinal = DatoFinal + DatoTemp[3];
DatoFinal = DatoFinal + DatoTemp[4];
DatoFinal = DatoFinal + DatoTemp[5];
}
}
else
DatoFinal = DatoTemp + ",00";
}
else
DatoFinal = "100,00";
Form1->Label4->Caption = DatoFinal;
VarCambio = DatoFinal;
DatoEntero = VarCambio;
Form1->ProgressBar4->Position = DatoEntero/1;
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
}
else
if (DigitoTemp == "5")
// Voltaje
{
DatoConDecimales =
(StrToInt(SacarNumero(DatoTemp))*0.0047977165200391006842619745845552*6.1282932
416953035509736540664376)+ 0.01;
if (DatoConDecimales < 0.1)
DatoConDecimales = 0;
VarCambio = DatoConDecimales;
DatoTemp = VarCambio;
if (DatoTemp.Length() > 1)
{
DigitoTemp2 = DatoTemp[2];
if ((DigitoTemp2 == ".")||(DigitoTemp2 == ","))
88
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
{
DatoFinal = "";
DatoFinal = DatoTemp[1];
DatoFinal = DatoFinal + DatoTemp[2];
DatoFinal = DatoFinal + DatoTemp[3];
DatoFinal = DatoFinal + DatoTemp[4];
}
else
{
DatoTemp = DatoTemp + "0";
DatoFinal = "";
DatoFinal = DatoTemp[1];
DatoFinal = DatoFinal + DatoTemp[2];
DatoFinal = DatoFinal + DatoTemp[3];
DatoFinal = DatoFinal + DatoTemp[4];
DatoFinal = DatoFinal + DatoTemp[5];
}
}
else
DatoFinal = DatoTemp + ",00";
Form1->Label25->Caption = DatoFinal;
VarCambio = DatoFinal;
DatoEntero = VarCambio;
Form1->ProgressBar5->Position = DatoEntero/1;
}
else
if (DigitoTemp == "6")
// Byte numeo 4 de los minutos (Solo si el numero que envio
el pic es 00h)
{
ByteMinutos1 = "00";
SumaMinutosString = ByteMinutos1 + ByteMinutos2 + ByteMinutos3 + ByteMinutos4;
MinutosTemp = IntToStr(StrToInt("$" + SumaMinutosString)%60);
if (MinutosTemp.Length() != 2)
MinutosTemp = "0" + MinutosTemp;
Form1->Label5->Caption = IntToStr(StrToInt("$" +
SumaMinutosString)/60)+":"+MinutosTemp;
if (MinutosAnteriores != StrToInt(MinutosTemp))
{
ContadorHorasServicio(MinutosTemp);
}
}
else
if (DigitoTemp == "7")
// Byte numeo 3 de los minutos (Solo si el numero que envio
el pic es 00h)
{
ByteMinutos2 = "00";
}
else
if (DigitoTemp == "8")
// Byte numeo 2 de los minutos (Solo si el numero que envio
el pic es 00h)
{
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
89
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
ByteMinutos3 = "00";
}
else
if (DigitoTemp == "9")
// Byte numeo 1 de los minutos (Solo si el numero que envio
el pic es 00h)
{
ByteMinutos4 = "00";
}
else
if (DigitoTemp == "A")
// Byte numeo 4 de los minutos
{
ByteMinutos1 = DatoTemp2;
SumaMinutosString = ByteMinutos1 + ByteMinutos2 + ByteMinutos3 + ByteMinutos4;
MinutosTemp = IntToStr(StrToInt("$" + SumaMinutosString)%60);
if (MinutosTemp.Length() != 2)
MinutosTemp = "0" + MinutosTemp;
Form1->Label5->Caption = IntToStr(StrToInt("$" +
SumaMinutosString)/60)+":"+MinutosTemp;
if (MinutosAnteriores != StrToInt(MinutosTemp))
{
ContadorHorasServicio(MinutosTemp);
}
}
else
if (DigitoTemp == "B")
// Byte numeo 3 de los minutos)
{
ByteMinutos2 = DatoTemp2;
}
else
if (DigitoTemp == "C")
// Byte numeo 2 de los minutos
{
ByteMinutos3 = DatoTemp2;
}
else
if (DigitoTemp == "D")
// Byte numeo 1 de los minutos
{
ByteMinutos4 = DatoTemp2;
}
}
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
void __fastcall THilo::Execute()
{
SetName();
EstadoLectura = true;
AnsiString VarTemp, NumTemp = "", DigitoTemp;
int DSRNumTemp = 0, Contador = 0, Conta2 = 0, DigitoNumTemp = 0;
do
{
DSRNumTemp = GetDSR();
if (DSRNumTemp == 1)
90
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
{
Contador = 0, Conta2 = 0;
NumTemp = "";
do
{
VarTemp = LeerPuerto();
Conta2 = Conta2 + 1;
if ((VarTemp != "00")&&(VarTemp.Length() < 3))
{
Contador = Contador + 1;
if (Contador == 1)
{
NumTemp = VarTemp;
DigitoTemp = NumTemp[2];
DigitoNumTemp = StrToInt("$" + DigitoTemp);
if (DigitoNumTemp > 3)
Contador = 2;
}
else
if (Contador == 2)
{
NumTemp = NumTemp + VarTemp;
ImprimirNum(NumTemp);
}
}
}
while ((Contador != 2)&&(Conta2 != 10000));
}
}
while (EstadoLectura == true);
}
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
void UsarHilo(int Tipo)
{
THilo *SecondThread = new THilo(false);
SecondThread->Resume();
if (Tipo == 1)
{
SecondThread->Suspend();
}
}
//--------------------------------------------------------------------------void __fastcall TForm1::Conectarpuerto1Click(TObject *Sender)
{
AbrirCOM();
}
//---------------------------------------------------------------------------
91
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
void __fastcall TForm1::Iniciarlectura1Click(TObject *Sender)
{
UsarHilo(0);
}
//--------------------------------------------------------------------------void __fastcall TForm1::Finalizarlectura1Click(TObject *Sender)
{
EstadoLectura = false;
}
//--------------------------------------------------------------------------void __fastcall TForm1::Desconectarpuerto1Click(TObject *Sender)
{
CerrarCOM();
}
//--------------------------------------------------------------------------void __fastcall TForm1::Salir1Click(TObject *Sender)
{
Form1->Close();
}
//---------------------------------------------------------------------------
void __fastcall TForm1::Iniciarhorasdeservicio1Click(TObject *Sender)
{
Form1->Memo1->Lines->Clear();
Form1->Memo1->Lines->LoadFromFile("Horas de Servicio.txt");
Form1->Memo1->Lines->Strings[0] = "250:00";
Form1->Memo1->Lines->SaveToFile("Horas de Servicio.txt");
Form1->Label59->Caption = "250:00";
Form1->Label59->Font->Color = clNavy;
Form1->Memo1->Visible = false;
}
//---------------------------------------------------------------------------
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
4.3.3. Cálculos de las variables utilizadas para el sistema de
monitoreo.
Fórmula del voltaje:
VoltajeAMostrar = (DatoRecibidoDesdeElPIC*(5 Vol / 1023 posibles
números que puede enviar el pic)*6.1282932416953035509736540664376+
0.01)
92
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
El 6.1282932416953035509736540664376 es para redondear al igual
que el 0,01 esto ya que no da exacto ya que el pic debería de tener 5 Vol y
tiene en realidad 5.35 vol en su entrada Vcc.
El 6.1282932416953035509736540664376 se supone que deberia ser
6 porque: si al haber 5 vol en el A/D, el debería marcar 30 en la pantalla del
PC asi que si por ejemplo hay 5 vol en el A/D del pic en la pantalla, deberían
verce 30 (5*6) ó si hay 1.33 vol en el A/D deberían verce 7.98 vol en la
pantalla del PC.
Los valores de las resistencias son:
RX = Resistencia que acompaña al potenciómetro.
Rpoten = Resistencia del potenciómetro.
S
O
D
A
V
ER
S
E
R
OS
Rz = Otra resistencia que acompaña al potenciómetro (Solo en la
H
DEREC
temperatura)
RPM:
70 ohm @ 0 Rpm
746 ohm @ 2100 Rpm
Resistencias en el proto
Rx = medida
Rpoten = 800 ohm @ 2300 Rpm (2 potenciometros 1 de 300 y otro de 500)
93
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Combustible:
56 @ 0 Litros
296 ohm @ 1200 Litros
Resistencias en el proto
Rx = medida
Rpoten = 300 ohm @ 1200 Litros
50 ohm @ 0 Litros.
Temperatura:
Resistencias reales del sensor
400 ohm @ 35 ·c
600 ohm @ 110 ·c
S
O
D
A
V
ER
S
E
R
OS
Resistencias en el proto
RECH
E
D
Rz = 400 ohm
Rx = medida
Rpoten = 200 ohm @ 110 ·C (2 potenciómetros 1 de 100 y otro de 100)
Presion de aceite:
Resistencias reales del sensor
155 ohm @ 70 Psi
1K ohm @ 100 Psi
Resistencias en el proto
94
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Rx = medida
Rpoten = 1k ohm @ 100 Psi
Voltaje:
Se usan 2 resistencias, una de 5K y otra de 1K esto es para hacer un
divisor de voltaje; el voltaje que queda en la resistencia de 1 K se lleva al
A/D, se procesa el dato para luego ser mostrado.
Rx = 5K
RA/D = 1k
4.4. Interfase entre el usuario y el sistema de monitoreo y visualización
digital a instalar en la lancha Tiburón III.
S
O
D
A
V
ER
S
E
R
S de monitoreo y visualización digital
El usuario de H
este
sistema
O
C
E
DER
instalado en la lancha Tiburón lll, se relacionará con dicho sistema por medio
de la interfaz gráfica y tiene una variedad de herramientas que le facilitan al
usuario el manejo del programa de la unidad procesadora (CPU) y la pantalla
mostrada en el monitor del CPU, en el cual se verá el programa funcionando
y tomando las lecturas programadas.
95
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
4.5 Implementar el prototipo para el monitoreo y visualización digital
diseñado para los motores marinos Mitsubishi tipo S6B3-MPTK
instalados en la lancha Tiburón III modelo 1992 fabricada por Inaven
C.A. perteneciente a la empresa Zulia Towing and Barge Co. C.A.
Para el desarrollo de este objetivo se creó en forma de prototipo el
ambiente de cada variable como lo son: combustible, RPM, presión de aceite
y temperatura para los efectos de los sensores, es decir los sensores del
prototipo trabajan bajo las mismas condiciones que en los motores marinos
Mitsubishi tipo S6B3-MPTK.
Presion de aceite: Esta variable se recreó utilizando una bombona con
S
O
D
A
V
ER
S
E
R
Stipo S6B3-MPTK se encuentra integrada a la
utilizada por el motor Mitsubishi
O
H
C
E
DER
bombona, asi como un manómetro. La idea de la utilización de esta bombona
capacidad de 10kg. La cápsula original para medir la presión de aceite
es que la misma permita recrear el ambiente de trabajo de la cápsula
medidora, esto se hace injectando aire a traves de un compresor hacia la
bombona. Luego de cargada la bombona (Ver fig. 4.9) con aire y previamente
llenada de aceite (4 litros hasta cubrir la cápsula), el aire queda atrapado
dentro de la bombona; asi pues el manómetro marcará alguna presión al
igual que la cápsula, registrando los cambios de presión dentro de la
bombona.
96
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 4.9: Bombona utilizada para simular presión
Fuente:Luis E Garcia V. 2006
Temperatura: La variable temperatura se creará mediante una cocina
de campamento marca COLEMAN (Ver fig. 4.10) la cual tiene la propiedad
de calentar agua hasta 100ºC la cual alcanza y sobrepasa la temperatura de
trabajo del motor permitiendo recrear un sobrecalentamiento. Para esta
variable también se uso la cápsula de temperatura original de los motores
Mitsubishi tipo S6B3-MPTK.
S
O
D
A
V
Figura 4.10: Cocina utilizada para simularS
temperatura,
ER cápsula de temperatura
E
R
S
O
H
C
E
DER
Fuente:Luis E Garcia V. 2006
Nivel de combustible: Para esta parte del trabajo se consta con el
flotador del tanque de combustible el cual registra de forma análoga la
cantidad de combustible encontrada en el tanque. El sensor medidor de
97
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
combustible se instalará en un recipiente de 20 litros para simular el consumo
y el llenado del tanque (Ver fig. 4.11). Se tomará en cuenta que la capacidad
original de la lancha en cuanto al combustible son 1200 litros, por ende se
realizará un proceso matemático para calcular una escala entre 1200 litros @
20 litros. 1200/20=60 entonces decimos que 60litros es igual a 1 litro.
Figura 4.11: Recipiente utilizado para simular el tanque de combustible
Fuente:Luis E Garcia V. 2006
Revoluciones por minutos: Para esta variable se consta de un
S
O
D
A
V
registran de igual forma las revoluciones
ERexistente al momento
S
E
R
S
O
H
C
E
funcionamiento.
DER
potenciómetro con los mismos rangos de trabajo del mando; asi pues se
del
4.6. Manual de usuario del sistema instalado en la lancha Tiburón lll
para los motores marinos Mitsubishi tipo S6B3-MPTK
Se realizó un manual de usuario para facilitar al usuario el uso del
sistema instalado en la lancha Tiburón lll.
98
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Manual de usuario
BIENVENIDOS A EL SISTEMA
VISUALIZACION
DIGITAL
DE MONITOREO Y
PARA
LOS
MOTORES
MITSUBISHI TIPO S6B3-MPTK INSTALADOS EN LA
LANCHA TIBURON lll.
Este manual de usuario está realizado con la intención de familiarizar
al usuario con la operación de dicho sistema.
S
O
D
A
V
Aquí se describirá cómo ingresar a dicho
ERsistema y facilitarle al usuario
S
E
R
OS
H
C
su desempeñoR
dentro
del
sistema.
E
DE
Puesta en marcha del sistema.
Para la puesta en macha del sistema es necesario iniciar el ordenador
donde se encuentra instalado el software del sistema.
99
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Al estar ya encendido saldrá en la pantalla principal el icono
correspondiente al sistema de monitoreo y visualización, en el cual es
necesario darle doble click con el ratón para abrirlo. (ver fig. 1)
Figura 1. Pantalla principal del ordenador donde se ilustra la ubicación del icono.
Icono del sistema de
monitoreo
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Fuente: Luis E García V. 2005
Lectura del Sistema de monitoreo y visualización.
Luego de darle doble click al ratón y ya abierto el programa saldrá la
siguiente pantalla. (ver fig. 2)
100
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Figura 2. Pantalla principal del sistema de monitoreo y visualización.
Fuente: Luis E García V. 2005
Luego de iniciado el sistema se busca en la esquina superior izquierda
la palabra “menú” en la cual se abre con un click sobre ella mostrando el
menú de inicio. (ver fig. 3)
Luego de abierto el menú saldrán las siguientes opciones:
•
Conectar puerto F2
•
Desconectar puerto F3
•
Iniciar lectura F4
•
Finalizar lectura F5
•
Iniciar horas de servicio F6
•
Salir Alt+F4
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Figura 3. Menú para iniciar el sistema.
Fuente: Luis E García V. 2005
101
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
NOTA: las teclas F2, F3, F4, F5, F6 y Alt+F4 son un método abreviado
para realizar dichas órdenes sin necesidad de abrir el “menú”.
Para iniciar la conexión es necesario escoger la opción de “iniciar
puerto” ó F2, el cual establece la conexión del puerto serial del ordenador
con la tarjeta convertidora.
Luego de iniciada la conexión, se procede a ejecutar la orden “iniciar
lectura” ó F4 la cual permite la visualización de las lecturas obtenidas por la
tarjeta convertidora en tiempo real.
Para dejar de visualizar las lecturas de las señales se le da click sobre
S
O
D
A
V
ER
S
E
R
OS
las palabra “finalizar lectura” ó F5 y luego “desconectar puerto” ó F3
ECH
R
E
D
Y para salir del sistema se utilizan las teclas “Alt+F4”.
Interpretación de la pantalla principal del sistema de monitoreo y
visualización.
Rpm:
revoluciones
del
motor
revoluciones por minutos.
102
mostradas
en
una
escala
de
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
En la sección de RPM se muestra las revoluciones del motor de una
forma numérica y de forma visual en escala de “0” a “3000”. (ver fig. 4)
Combustible: Cantidad de combustible existente en la embarcación
en escala de litros. (ver fig. 5)
Figura 4. Medidor de Revoluciones del motor. (Dentro del recuadro)
S
O
D
A
V
EV.R2005
Fuente: Luis EE
García
S
R
S
O
H
C
E
R 5. Medidor de nivel de Combustible. (Dentro del recuadro)
DEFigura
Fuente: Luis E García V. 2005
Fuente: Luis E García V. 2005
103
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
En la sección de combustible se muestra la cantidad de litros que tiene
la embarcación y se muestra de una forma numérica y de forma visual en
escala de “vacío a full” y en la parte numérica llega hasta “1200” litros.
En esta sección se muestra una esfera ubicada dentro de recuadro del
combustible la cual se encuentra color blanco. Esta esfera cambia a color
rojo para advertirle al usuario cuando a la embarcación le quedan solo 100
litros de combustibles en su tanque.
Temperatura: Temperatura existente dentro del motor en escala de
grados centígrados “ ºC “. (ver fig. 6)
S
O
D
A
V
ER
S
E
R
OS
Figura 6. Medidor de Temperatura. (Dentro del recuadro)
H
DEREC
Fuente: Luis E García V. 2005
104
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Este medidor muestra la temperatura de una forma numérica y de
forma visual en los siguientes rangos “40ºC a 110ºC”.
Este medidor también posee una esfera blanca que cambia su estado
a rojo cuando la temperatura sobrepasa los 90ºC. Esto es una alarma visual
para indicarle al usuario que está trabajando dentro de un rango no
recomendado.
Presión de aceite: Este medidor muestra la presión dentro del motor
en escala de “PSI”. (ver fig. 7)
Figura 7. Medidor de Presión de aceite. (Dentro de recuadro)
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Fuente: Luis E García V. 2005
105
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Este medidor al igual qué el de temperatura y el de combustible,
también posee una esfera blanca que cambia su estado a rojo cuando la
presión
baja de los 90 PSI. Esto es una alarma visual para indicarle al
usuario que esta trabajando dentro de un rango no recomendado.
Voltaje: Este indica el voltaje existente en la lancha. (ver fig. 8)
Figura 8. Medidor del Voltaje de la lancha (Dentro del recuadro)
S
O
D
A
V
ER
S
E
R
SLuis E García V. 2005
Fuente:
O
H
C
E
DER
Este indica el voltaje en el cual está funcionando la lancha y se puede
ver de una forma numérica y otra visual que va de una escala de “0 Volt a 30
Volt”.
Horas de trabajos: Aquí se pueden ver las horas de trabajo que tiene
el motor. Estas horas se acumulan a medida de cada trabajo. (ver fig. 9)
106
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Si el motor es apagado y se vuelve a encender, las horas de trabajos
quedan grabadas en el contador visual de la pantalla principal del programa.
Figura 9. Horas de trabajo del motor. (Dentro del recuadro).
Fuente: Luis E García V. 2005
S
O
D
A
V
R
E
S
E
R
Este contador lleva O
la cuenta
S en una escala de tiempo expresadas en
H
C
E
ER
“horas yD
Minutos”. Este contador visual también tiene la propiedad de ser
reseteado con un pulsador ubicado en la tarjeta convertidora de señales.
Horas de servicio: Este es un contador de forma regresiva que va
desde 250 horas a 0 horas. Este contador es utilizado para indicarle al
usuario del sistema cúando le toca a la embarcación el próximo servicio. (ver
fig. 10)
107
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Cuando las horas de servicio llegan a cero, en la pantalla principal sale
un aviso en blanco debajo del indicador de las horas de servicio.
Cuando las horas de servicios llegan a cero, los números del conteo
de dichas horas se ponen de color rojo y empieza un conteo ascendente para
indicar las horas que tiene el motor trabajando de más sin haberle realizado
el servicio.
Figura 10. Contador de las horas de servicio. (Dentro del recuadro)
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
Fuente: Luis E García V. 2005
Cuando las horas de servicio llegan a cero en la pantalla principal sale
un aviso en blanco debajo del indicador de las horas de servicio.
Cuando las horas de servicios llegan a cero, los números del conteo
de dichas horas se ponen de color rojo y empieza un conteo ascendente para
108
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
indicar las horas que tiene el motor trabajando de más sin haberle realizado
el servicio.
Figura 11. Pantalla blanca indicando servicios necesarios (Dentro del recuadro)
Fuente: Luis E García V. 2005
Cuando se realiza el servicio se resetea las horas de servicio por
S
O
D
A
V
ER
S
E
R
Sda un click con el ratón.
O
explicado anteriormente
y se
le
H
C
E
DER
medio de la tecla F6 (“iniciar horas de servicio”) ó va directamente al menú
Cuando se desea dejar de usar el sistema, se pulsan las teclas F5
(“finalizar lectura”) y luego F3 (“desconectar del puerto”), luego se le da un
click a la palabra “salir” ó pulsar las teclas “Alt+F4” y asi de esa manera se
cerrará el programa.
109
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
CONCLUSIONES
Los resultados obtenidos en este proyecto permiten llegar a una serie
de conclusiones, las cuales, se convierten en los aspectos más importantes
de la misma, puesto que, permite resumir en pequeñas cláusulas todo el
trabajo realizado. Estas han sido formuladas en término del cumplimiento de
cada una de las fases u objetivos específicos trazados en la primera parte
de esta investigación.
•
Se estudio el sistema de monitoreo actual que poseen los motores
modelo MITSUBISHI S6B3-MPTK de la lancha TIBURON lll.
•
S
O
D
A
V
ER
S
E
R
S
de las señales análogas
emitidas por los sensores, la transformación
O
H
C
E
R
E
D
digital de los datos, monitorear los cambios del sistema para tener control
Se construyó la tarjeta electrónica utilizada para la conversión y manejo
del trabajo realizado por el motor y también para la comunicación con la
unidad procesadora (CPU).
•
Se elaboraron dos (2) softwares que trabajan en conjunto, el software del
microcontrolador que trabaja en forma de bucle, haciendo constante
monitoreo de las señales emitidas por los sensores para luego ser
112
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
mostradas por medio del software madre, a través de la pantalla de la
computadora.
•
En la implementación de este prototipo se recreó cada variable con los
valores y condiciones reales necesarias para simular el funcionamiento de
los motores marinos MITSUBISHI modelo S6B3-MPTK.
•
Se realizó un manual de usuario donde se explica cada herramienta
existente en el programa madre, con la intención de ofrecer un mejor
adiestramiento a los usuarios del sistema.
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
113
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
RECOMENDACIONES
•
Implementar el sistema de monitoreo y visualización digital diseñado
para tener un mejor y más eficaz control de las variables estudiadas.
•
No permitir el uso de éste sistema a personas previamente
adiestradas ya que podrían estropear o desconfigurar el sistema
teniendo como consecuencia un funcionamiento errado y una lectura
imprecisa de las variables.
•
Realizarle servicio a los componentes del sistema como lo son, la
tarjeta
electrónica
convertidora,
computadora
y
S
O
D
A
V
ER
S
E
R
S
O
sistema de monitoreo.
H
C
E
DER
cables
de
comunicación para constatarse del buen estado y funcionamiento del
•
Respetar los resultados de las lecturas entregados por el sistema para
alargar la vida del motor y realizarle al motor de la lancha tiburón lll los
servicios estipulados cada 250 horas de uso como lo recomienda el
manual de usuario MITSUBISHI.
114
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
BIBLIOGRAFÍA
SIPEX CORPORATION, BiCMOS design.
Data Sheet. SP232A/233A/310A/312A.
MICROCHIP, Enhanced FLASH Microcontrollers with CAN.
Data Sheet. PIC18FXX8
MITSUBISHI, Marine.
User Manual. S6B3-MPTK
MITSUBISHI, Marine.
Part Manual. S6B3-MPTK
GILES, Ronald V.
S
O
D
A
V
ER
S
E
R
OS
Mecánica de los fluidos e Hidráulicos. Editorial Mc Graw Hill.
Segunda Edición.
ECH
R
E
D
HERNANDEZ R., FERNÁNDEZ C. y BAPTISTA P.
Metodología de la Investigación. Mexico. Editorial Mc Graw-Hill.
1991.
TAMAYO M. y TAMAYO.
El Proceso de la Investigación Científica. Incluye glosario y manual
De evolución de proyectos. México. Noriega Editores. 1999.
V
Universidad Rafael Urdaneta
Zulia Towing and Barge CO. C.A
Páginas WEB:
http://www.midif.fr/marine-propulsion-engines_1000_s6b3.htm
http://members.fortunecity.es/100pies/mecanica/partes.htm
http://www.automotriz.net/tecnica/pistones.html
http://www.midif.fr/marine-propulsion-engines_1000_s6b3.htm
http://www.todomicro.com/trabajos18/descripcion-pic/descripcion-pic.shtml
http://www.asifunciona.com/electronica/af_conv_ad/conv_ad_2.htm
http://es.wikipedia.org/wiki/Se%C3%B1al_digital
www.sc.ehu.es/sbweb/fisica/fluidos/estatica/introduccion/Introduccion.htm)
S
O
D
A
V
ER
S
E
R
OS
H
DEREC
V