aparato para la seleccion automatica del productos agricolas tal
Anuncio

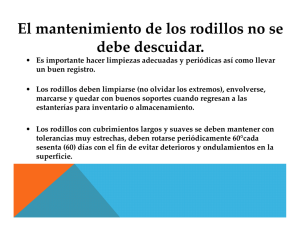
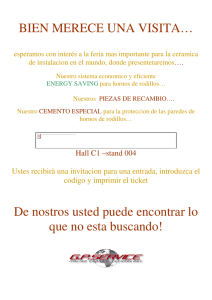
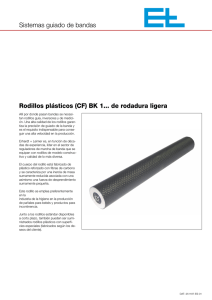
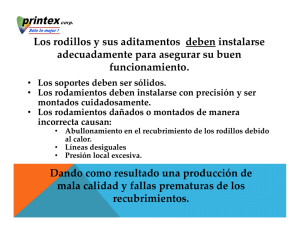
k REGISTRO DE LA PROPIEDAD INDUSTRIAL 19 k ES 2 027 274 kInt. Cl. : B07C 5/00 11 N.◦ de publicación: 5 51 ESPAÑA k B65G 47/96 TRADUCCION DE PATENTE EUROPEA 12 kNúmero de solicitud europea: 87118792.8 kFecha de presentación : 18.12.87 kNúmero de publicación de la solicitud: 0 273 313 kFecha de publicación de la solicitud: 06.07.88 T3 86 86 87 87 k 54 Tı́tulo: Aparato para la clasificación automática de productos agrı́colas tales como frutos. k 30 Prioridad: 24.12.86 IT 3623 /86 24.12.86 IT 3624 /86 k 73 Titular/es: M.A.F.(Materiel pour l’Arboriculture Fruitiere) S.A. 546 Rue Gustave-Jay F-82001 Montauban Cédex, FR k 72 Inventor/es: Gentili, Luciano k 74 Agente: Fernández Candelas, Carlos 45 Fecha de la publicación de la mención BOPI: 01.06.92 45 Fecha de la publicación del folleto de patente: 01.06.92 Aviso: k k En el plazo de nueve meses a contar desde la fecha de publicación en el Boletı́n europeo de patentes, de la mención de concesión de la patente europea, cualquier persona podrá oponerse ante la Oficina Europea de Patentes a la patente concedida. La oposición deberá formularse por escrito y estar motivada; sólo se considerará como formulada una vez que se haya realizado el pago de la tasa de oposición (art◦ 99.1 del Convenio sobre concesión de Patentes Europeas). Venta de fascı́culos: Registro de la Propiedad Industrial. C/Panamá, 1 – 28036 Madrid 1 2 027 274 DESCRIPCION La presente invención se refiere a un aparato para la clasificación automática de productos agrı́colas tales como frutos. El aparato de la presente invención constituye una mejora aportada a los clasificadores automáticos para frutos y parecidos, los cuales se describen por ejemplo en la Patente de los Estados Unidos de América número 4.106.628 a nombre de Warkentin y Colaboradores, presentada el 15 de agosto de 1978, que clasifica los frutos basándose en su peso y su color, y que vigila la posición, el color y el peso del fruto, mientras éste último se mueve desde los puestos de examen hasta los puestos de descarga. Se hace referencia a la Patente mencionada en lo que antecede para una explicación detallada de las máquinas clasificadoras. Se hace también referencia a la Patente de los Estados Unidos de América número 4.569.434 a nombre de Horm y Colaboradores, a la solicitud de Patente Británica número 2.143.491A a nombre de A.J. Warkentin y a la Patente Británica número 2.126.356A a nombre de Kabushiki Kaisha Maki Seisakusho para una descripción adicional de los aparatos de clasificación de frutas y verduras, utilizando receptáculos durante el transporte de los frutos a lo largo del trayecto, o durante el examen por uno o varios detectores. Estas patentes describen receptáculos que pueden inclinarse lateralmente con el objeto de efectuar su descarga. Sin embargo, como el dispositivo de la Patente a nombre de Warkentin y Colaboradores mencionada en lo que antecede, los dispositivos de las demás Patentes no permiten la rotación del fruto durante su examen superficial, y tampoco disponen de medios combinados para medir el peso del fruto mientras se carga un rodillo. El documento EP-A2-0.105.114 describe un aparato para hecer girar los frutos con el fin de clasificarlos y que incluye una pluralidad de rodillos de transporte separados los unos de los otros que están montados de manera giratoria en un par de cadenas en movimiento y una sección de aceleración de rotación en la cual un cierto número de los rodillos de transporte en movimiento entran en contacto con una correa de aceleración de la rotación. La finalidad técnica de la presente invención consiste en proporcionar un aparato para la clasificación automática de productos agrı́colas tales como frutos que permite conseguir de la manera más cómoda y más eficaz y rápida la detección de las caracterı́sticas de los productos. Un objeto suplementario de la invención consiste en proporcionar un aparato de diseño sencillo, de funcionamiento fiable y de utilización versátil respecto a los varios tipos de productos. Otro objeto consiste en proporcionar un aparato capaz de clasificar frutos de dimensiones muy diferentes sin que sea preciso ajustar o sustituir componentes. Estos objetos se consiguen gracias a la parte de caracterización de la reivindicación 1. Los detalles de la invención aparecerán a la lectura de la descripción detallada de un modo 2 5 10 15 20 25 30 35 40 45 50 55 60 65 2 de realización, que se da solo a tı́tulo de ejemplo, del aparato de acuerdo con la invención que se ilustra a tı́tulo indicativo en los dibujos adjuntos, en los cuales: La figura 1 es una vista esquemática lateral del aparato de acuerdo con la invención; La figura 2 es una vista transversal en sección vertical del aparato; La figura 3 es una vista en sección similar a la precedente, que ilustra los rodillos en posición inclinada; y La figura 4 es una vista en perspectiva parcialmente abierta y transparente de un puesto de medición de peso del aparato. En las figuras descritas en lo que antecede, la referencia 1 indica de manera general un trayecto de clasificación para frutos y hortalizas. Dichos productos son transportados a lo largo del trayecto 1 por una cadena sin fin alargada y flexible 2, elemento de un transportador que se extiende horizontalmente a lo largo de una porción activa, en la cual la cadena está soportada convenientemente por un elemento 3. La cadena 2 está provista de medios de soporte 4 distribuidos uniforme y longitudinalmente para una pluralidad de rodillos 5 cuyos ejes se extienden horizontalmente en sentido transversal respecto a la cadena 2. Un producto 6 está destinado a estar soportado y transportado entre un par de rodillos adyacentes 5 que sirven como receptáculo, representándose dicho producto en lı́neas de trazo discontı́nuo (figura 2). Con este fin, los rodillos 5 definen cada uno unas porciones 5a contrapuestas, sustancialmente en forma de conos truncados que convergen hacia el centro. En los extremos opuestos o en una posición adyacente a los mismos, los rodillos 5 están provistos axialmente a ejes o vástagos correspondientes 7 por medio de los cuales descansan, pudiendo girar libremente sobre un par respectivo de horquillas o de elementos bifurcados 8 que forman parte de dicho medio de soporte 4. Las horquillas 8 sobresalen hacia arriba a partir de una pieza transversal 9 que puede bascular lateralmente alrededor de un eje paralelo a la extensión longitudinal del trayecto 1. Más particularmente, la pieza transversal 9 pivota, en un extremo, sobre un pasador o pivote 10 asociado de manera rı́gida con la cadena 2, mientras que en la extremidad opuesta tiene una aleta 11 que, como se ilustra en la figura 3, está adaptada para acoplarse con una leva fija 12 adaptada para accionar el movimiento de basculamiento de la pieza transversal 9 y de su rodillo asociado 5. En un modo de realización preferido, las piezas transversales 9 y sus rodillos asociados respectivos 5 están montados de modo que puedan efectuar un movimiento de vaivén alrededor de un pivote 10, el cual está sujeto en el costado de un elemento transversal 10a y se extiende hacia adelante a corta distancia y hacia atrás a corta distancia respecto al mismo. El elemento transversal 10a tiene sustancialmente la forma de una U invertida, que tiene dos costados o porciones laterales 10b que se extienden hacia abajo ventajosamente, formados en sus extremidades inferiores, unos salientes respectivos 3 2 027 274 o pequeños dientes de extremidad 10c, adaptados para acoplarse, de manera elástica, con los eslabones de la cadena 2. A partir del lado del elemento transversal 10a opuesto al que soporta el pivote 10, la superficie del elemento transversal se extiende para definir un saliente 10d sustancialmente horizontal, que actúa como limitador de carrera para los desplazamientos del movimiento de basculamiento o de oscilación de las piezas transversales y con las cuales se acoplan elementos de tope correspondientes constituidos por unos vástagos 11b, asociados de manera rı́gida con la aleta 11 y que sobresalen de manera apropiada delante y detrás de ésta última. Como puede verse claramente en el dibujo, los ejes 7 de los rodillos 5 tienen un diámetro inferior al gancho del asiento de soporte definido por las horquillas 8, y por consiguiente es posible elevar dichos rodillos con relación a las horquillas, convenientemente por medio de rampas de elevación 13a y de levas 13 que están dipuestas simétrica y lateralmente con relación al trayecto 1 para dar lugar a la elevación de las extremidades 7a de los ejes las cuales están ligeramente ahusadas y soportan los rodillos durante la operación de medición de peso. Dichas horquillas 8 forman ventajosamente unas ranuras sustancialmente verticales y constituyen, en un modo de realización preferido, unos medios adaptados para permitir pequeñas oscilaciones verticales de los rodillos 5. Esto permite pesar los productos 6, puesto que dichas levas 13 son la parte de tara de una báscula apropiada que incluye, por ejemplo, dos células de medición de carga 13b soportadas por unos montantes fijados en el bastidor de la máquina. Se observará que las horquillas 8 tienen extremidades superiores 8a dispuestas de manera ligeramente convergente para impedir la salida de los ejes de los rodillos 5 durante la carrera de retorno de la cadena 2. Las ranuras abiertas hacia arriba permiten introducir los rodillos desde arriba. En cualquier caso no se excluye que las ranuras, puedan estar cerradas en la parte superior y, en este caso, la introducción de los ejes 7 en los soportes se efectúa mediante un ligero movimiento hacia el exterior, permitido, por ejemplo, por la deformación elástica de la parte superior de los soportes. Además, los ejes 7 llevan, asociados rı́gidamente con ellos, unas ruedas 14, situadas externamente respecto a la región de acoplamiento de las horquillas 8 y aguas abajo respecto a las extremidades 7a para descansar sobre las levas 13, 13a. Las ruedas 14 están adaptadas para acoplarse, en una región adaptada del trayecto 1, con unos tacos o unas correas 15 de accionamiento, hechas ventajosamente de un material que tiene un elevado coeficiente de fricción, como por ejemplo el caucho, para producir por fricción la rotación axial de los ejes 7 y de los rodillos 5 y, por tanto, la rotación de productos transportados, aunque es evidente que pueden también utilizarse otros medios cinéticos de transmisión para transmitir el movimiento de la correa 15 a los rodillos 5. La rotación de los rodillos 5 permite que unos sensores (no ilustrados) situados en otro puesto de examen pueden explorar la totalidad de la superficie del producto para determinar sus caracterı́sticas 5 10 15 20 25 30 35 40 45 50 55 60 65 4 dimensionales y otros parámetros cualitativos similares. Es posible hacer variar la velocidad de rotación de los productos controlando positivamente el movimiento de translación de las correas 15 con relación a la velocidad de avance de los productos a lo largo del trayecto. En tal caso, puede hacerse que las correas estén dispuestas en forma de bucle cerrado y sean accionadas por un medio de suministro de energı́a auxiliar apropiado o por un motor. En un modo de realización preferido, los rodillos 5 y las regiones 14a situadas internamente respecto a las ruedas 14 definen sustancialmente la forma de un sólido de revolución generada por un arco de circunferencia que gira alrededor del eje 7 (paralelamente a la cuerda del arco de circunferencia) y está interrumpida por los ejes 7. El trayecto circular del perfil de los rodillos, conjuntamente con el hecho de que los rodillos pueden hacerse de material blando como por ejemplo el caucho, hace que la carga sea distribuida más uniformemente y por tanto la fuerza de apoyo de las superficies esferoidales de los frutos sea amortiguada. Para explorar el espacio entre un par de rodillos adyacentes puede preverse un dispositivo que sirve para determinar la presencia o la ausencia de productos, ası́ como unos medios sensibles a la presencia de un producto individual adaptado para activar un puesto de examen. De manera ventajosa, el aparato de acuerdo con la invención está provisto de medios, como por ejemplo los componentes del circuito cableado de Warkentin y Colaboradores o el equivalente moderno del microordenador, para efectuar el seguimiento de la posición de cada producto individual 6 transportado a lo largo de dicho trayecto con relación a dichos puestos, y unos medios que generan una señal que corresponde al peso de cada producto individual medido en dicho puesto de examen, y para compararlo con criterios predeterminados, con el fin de descargar a dicho producto individual de acuerdo con dicho criterio. El aparato puede utilizarse en combinación con un dispositivo de medición de peso que incluye una célula de medición de carga 13b dispuesta encima de dicha rampa 13 y que soporta dicha sección horizontal de dicha rampa. De manera resumida, el aparato descrito permite rezalizar la clasificación de las caracterı́sticas de los productos 6 mientras están desplazándose a lo largo del trayecto, utilizando de la manera más eficaz instrumentos de medición tradicionales, y, al mismo tiempo, asegura la distribución de los productos clasificados en uno o varios trayectos auxiliares P debido a la presencia de los rodillos basculantes 5. Es evidente que dicho basculamiento puede ser controlado de manera diferente de la que ha sido descrita en lo que antecede, por ejemplo, actuando en dicha aleta 11 de los rodillos 5 por medio de la leva 12 o de pulsadores apropiados 16 activados por elementos capaces de efectuar movimiento de vaivén, elementos de solenoide o parecidos. La presente invención difiere de muchas maneras de la Patente de Warkentin y Colaboradores. Por ejemplo los artı́culos que anteceden clasifica3 5 2 027 274 dos, son transportados sobre pares de rodillos por unos receptáculos que pueden bascular hacia un lado del trayecto de transporte 1 en lugar de ser transportados por unos recipientes cóncavos. El hecho más importante consiste en que la operación de medición de peso se efectúa elevando el receptáculo encima de la cadena y transmitiendo su peso a una sección horizontal de una rampa de elevación conectada con una célula de medición de carga y soportada independientemente por ella. Puesto que, durante la operación de medición de peso no es necesario transferir los productos individuales 6 a una sucesión de recipientes cóncavos, no es necesario, en caso de variación de las dimensiones de los productos, hacer variar las dimensiones y la separación de los receptáculos o rodillos 5 a lo largo de la cadena 2. Cada artı́culo puede ser procesado con rodillos idénticos 5 con una separación constante incluso en caso de productos 6 de dimensiones extrema- 5 10 15 20 25 30 35 40 45 50 55 60 65 4 6 damente diferentes. Además, es posible utilizar rodillos estrechos 5 que permiten el examen óptico del producto incluso desde la parte inferior. Puesto que el soporte está constituido por un par de rodillos 5, es igualmente posible hacer girar el fruto 6 con el fin de explorar su superficie para determinar propiedades tales como madurez, manchas, color, forma y otras condiciones, como por ejemplo las dimensiones del diámetro, de la superficie u otra indicación de tamaño. Por tanto, la clasificación puede efectuarse basándose en el peso, o en una combinación de peso con uno o varios parámetros adicionales, que se determinan haciendo girar el fruto y explorando su superficie. En el modo de realización práctico de la invención, los materiales utilizados, las formas y las dimensiones pueden ser determinados de acuerdo con las necesidades. 7 2 027 274 REIVINDICACIONES 1. Aparato para la clasificación y la distribución automática de productos, que incluye un transportador (2) para transportar productos individuales a lo largo de un trayecto (1) y una pluralidad de rodillos separados (5) dispuestos en dicho transportador (2) con sus ejes situados transversalmente respecto a la extensión longitudinal del transportador (2), unos rodillos adyacentes (5) que definen entre ellos unos receptáculos de forma alargada para los productos individuales (6), incluyendo además dicho aparato unos medios (4) conectados con dicho transportador (2) para soportar de manera giratoria dichos rodillos individuales (5) en el transportador (2), estando caracterizado dicho aparato porque los medios (4) para soportar de manera giratoria dichos rodillos individuales (5) comprenden unos elementos de horquilla (8) que definen ranuras sustancialmente verticales que actúan como elementos de soporte para los ejes (7) de dichos rodillos (5), sobresaliendo dichos elementos de horquilla (8) hacia arriba a partir de un elemento de pieza transversal (9) que pivota por una de sus extremidades alrededor de un pivote (10) conectado con dicho transportador (2) y que tiene un eje de pivotamiento paralelo a la extensión longitudinal de dicho transportador (2), estando accionado dicho elemento de pieza transversal (9) de manera giratoria alrededor de dicho pivote (10) por unos elementos de leva de basculamiento (12) y/o elementos de empuje (16) dispuestos en una posición adyacente a dicho transportador con el fin de hacer bascular dichos rodillos (5) para distribuir los productos individuales (6) en uno o varios trayectos auxiliares (P), teniendo dichas ranuras verticales de dichos elementos de horquilla (8) una anchura horizontal ligeramente superior al diámetro de los ejes (7) de los rodillos (5) y una altura vertical superior al diámetro de los ejes (7) de los rodillos (5) para permitir ası́ la elevación vertical de dichos rodillos (5), siendo producida la elevación vertical de dichos rodillos por unas rampas y levas de elevación de rodillos (13, 13a) dispuestas en posiciones adyacentes a dicho transportador (2) y que actúan sobre las extremidades (7a) de los ejes (7) de los rodillos (5). 2. Aparato según la reivindicación 1, caracterizado porque incluye además unos puestos (13b) para examinar y para pesar dichos productos (6), para explorar la superficie de dichos productos (6), y para clasificar dichos productos (6) basándose en su peso, las condiciones de su superficie, y sus dimensiones. 3. Aparato según la reivindicación 1, caracterizado porque dichos rodillos (5) están separados igualmente a lo largo de dicho transportador (2). 4. Aparato según la reivindicación 2, caracterizado porque incluye un dispositivo para explorar el espacio entre dos rodillos adyacentes (5) con el fin de determinar la presencia o la ausencia de productos (6), y un medio sensible a la presencia de un producto individual, adaptado para activar un puesto de examen. 5. Aparato según la reivindicación 2, caracterizado porque incluye además unos medios 5 10 15 20 25 30 35 40 45 50 55 60 65 8 para efectuar el seguimiento de la posición de cada producto individual (6) transportado a lo largo de dicho trayecto (1) con relación a dichos puestos. 6. Aparato según la reivindicación 2, caracterizado porque incluye un medio para generar una señal que corresponde al peso de cada producto individual (6) medido en dicho puesto para examinar dichos productos (6), unos medios para comparar dicha señal con criterios predeterminados, y unos medios para descargar dichos productos individuales de acuerdo con dichos criterios. 7. Aparato según la reivindicación 2, caracterizado porque incluye un dispositivo eléctronico de medición de peso situado en uno de dichos puestos para examinar y para pesar dichos productos (6), estando constituido dicho transportador por una cadena sin fin (2) de forma alargada y flexible, estando dispuestas dichas rampas y dichas levas de elevación de rodillos (13, 13a) en aquel de dichos puestos donde está situado dicho dispositivo electrónico de medición de peso, proque dichas extremidades (7a) de dichos ejes (7) de dichos rodillos (5) se acoplan con dichas rampas y levas de elevación de rodillos (13, 13a) en aquel de dichos puestos que tiene un dispositivo electrónico de medición de peso con el fin de desplazar ası́ el peso de dichos rodillos (5) y de dichos productos (6) soportados por ellos desde dicha cadena (2) hasta dichas rampas y levas (13, 13a). 8. Aparato según la reivindicación 7, caracterizado porque dicho dispositivo de medición de peso incluye una célula de media carga (13b) situada encima de dicha leva (13). 9. Aparato según la reivindicación 1, caracterizado porque dichos elementos de horquilla (8) son soportes bifurcados (8), abiertos en su parte superior para definir un asiento destinado a soportar de manera giratoria dichos rodillos (5). 10. Aparato según la reivindicación 1, caracterizado porque comprende puestos de examen separados para pesar dichos productos (6) y para explorar su superficie, incluyendo además dicho aparato unas superficies de fricción constituidas por tacos o correas de accionamiento (15) hechas de un material que presenta un elevado coeficiente de fricción y que están dispuestas en dichos puestos de examen separados, extendiéndose paralelamente a dicho trayecto (1), estando provistos dichos rodillos (5) de porciones de susperficies dentadas (14) para su acoplamiento con dichas superficies de fricción (15) con el fin de hacer girar ası́ dichos rodillos (5) y los productos individuales (6) cargados en ellos. 11. Aparato según la reivindicación 1, caracterizado porque comprende un dispositivo de exploración adaptado para explorar la superficie de un producto individual (6) con el fin de generar una señal que corresponde a un parámetro de dicha superficie, incluyendo dicho aparato unos medios para descargar el producto individual (6) en un puesto de descarga de acuerdo con los criterios combinados de peso y de dicho parámetro de dicha superficie. 12. Aparato según la reivindicación 9, caracterizado porque dichos rodillos (5), tienen porciones contrapuestas (5a) que presentan sustan5 9 2 027 274 cialmente la forma de un cono truncado convergente hacia el centro de dichos rodillos (5), sobresaliendo dichos ejes (7) en sentido axial desde las extremidades externas de dichas porciones contrapuestas (5a). 13. Aparato según la reivindicación 1, caracterizado porque dicha pieza transversal (9), tiene en una extremidad opuesta a dicho pivote (10) una aleta (11) adaptada para entrar en contacto con dichos elementos de leva de basculamiento 5 10 15 20 25 30 35 40 45 50 55 60 65 6 10 (12) estando provista dicha aleta (11) de una superficie de apoyo en forma de varilla (11b) destinada a entrar en contacto con dichos elementos de empuje (16). 14. Aparato según la reivindicación 9, caracterizado porque dichos receptáculos (8) tienen extremidades convergentes (8a) adaptadas para impedir la salida de dichos ejes (7) de dichos rodillos (5) durante el movimiento de dicho transportador (2). 2 027 274 7 2 027 274 8 2 027 274 9