Descargar
Anuncio

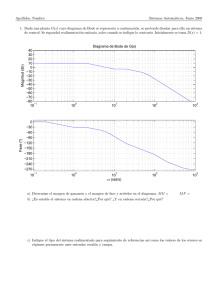
Departamento de Electrónica Teorı́a de Control II - 66.28 Trabajo Práctico FIUBA 3 de diciembre de 2010 Página 1 de 4 El presente trabajo práctico ha sido recopilado a partir de guı́as de trabajos prácticos preparadas por el Dr. Julio H. Braslavsky con la colaboración de la Ing. Virginia Mazzone, para la materia Control Automático II durante el año 2001 en la Universidad Nacional de Quilmes. Este material se utiliza bajo autorización expresa del Dr. Braslavsky. Alejandro S. Ghersin Diciembre de 2010 1. Para la ecuación de estado no lineal x1 ( t ) + u ( t ) 2x2 (t) + u(t) ẋ (t) = 3x3 (t) + x12 (t) − 4x1 (t) x2 (t) + 4x22 (t) y ( t ) = x3 ( t ) determinar la solución nominal constante correspondiente a una entrada nominal constante cualquiera dada u(t) = ũ. Linealizar la ecuación de estado alrededor de esta solución nominal. Mostrar que si xδ (0) = 0, entonces yδ (t) es cero independientemente de uδ (t). 2. Encontrar una realización de la matriz transferencia −(12s + 6) 22s + 23 . Ĝ (s) = 3s + 34 3s + 34 3. Dado el sistema −25 −45 ẋ = −5 −15 15 35 y= 1 0 0 x −55 2 −15 x + 0,2 u 35 −0,8 determinar si es Lyapunov estable, asintóticamente estable, y/o BIBO estable. Si no fuera BIBO estable, dar un ejemplo de una entrada acotada que produzca una salida no acotada. 4. Los tests de autovectores de Popov-Belevitch-Hautus (PBH) dan condiciones necesarias y suficientes para la controlabilidad y observabilidad de un sistema lineal estacionario definido por ( A, B, C ). Test PBH de Controlabilidad. Un sistema lineal estacionario es controlable si y sólo si para todo autovector izquierdo v de A (v T A = λv T ) se cumple que v T B 6= 0. Test PBH de Observabilidad. Un sistema lineal estacionario es observable si y sólo si para todo autovector derecho u de A (Au = λu) se cumple que Cu 6= 0. (a) Usando el test PBH mostrar que la controlabilidad es una propiedad invariante con respecto a realimentación de estados: si el par ( A, B) es controlable, entonces el par ( A + BK, B) es controlable para cualquier K. (b) Usando el test PBH mostrar que la observabilidad no es una propiedad invariante con respecto a realimentación de estados: si el par ( A, C ) es observable, el par ( A + BK, C ) puede no ser observable para algún K. (c) Mostrar que el sistema SISO ẋ (t) = Ax (t) + bu(t) y(t) = cx (t) + du(t) es controlable y observable si y sólo si las matrices A y A b c d no tienen autovalores comunes. Teorı́a de Control II - 66.28 Trabajo Práctico Página 2 de 4 5. Para el sistema dado por las EE 2 1 1 1 3 6 x ( t ) + 0 u ( t ) ẋ (t) = 5 −5 −1 −4 0 y(t) = 1 1 2 x (t) (a) Determinar si es controlable y/u observable. (b) Transformarlo a la forma canónica de Jordan y determinar qué modos individuales son controlables y/u observables. (c) Encontrar la función transferencia y observar qué modos aparecen como polos. 6. Para el sistema del diagrama de bloques de la Figura 1, encontrar condiciones necesarias y suficientes para los valores de a, b, k1 , y k2 para que el sistema sea controlable y observable (I es un integrador.) u + k1 I - + a + - y + 2 I k2 b Figura 1: Sistema del Problema 6 7. Control del ángulo de elevación de un avión. El sistema de ecuaciones (1) α̇ + 0,313α − θ̇ − 0,232δ = 0 θ̈ + 0,788α + 0,426θ̇ − 1,151δ = 0 es un modelo simplificado del movimiento de un avión linealizado alrededor de un punto de operación. La variable α representa el ángulo de ataque del avión, θ es su ángulo de elevación con respecto a la horizontal, y δ es la inclinación del alerón elevador (variable de control). Los valores numéricos en (1) corresponden a un avión comercial Boeing (http://www.engin.umich.edu/group/ctm/). Especificaciones de Diseño: Se desea diseñar un controlador por realimentación para que la salida — el ángulo de elevación θ (t) — tenga una respuesta al escalón con un sobrevalor menor al 10 %, un tiempo de crecimiento menor a 2 segundos, un tiempo de establecimiento menor a 10 segundos, y un error estático menor al 2 %. Por ejemplo: si la entrada es un escalón de 0.2 rad (11 grados), entonces el ángulo de elevación no debe exceder 0.22 rad, alcanza 0.2 rad en menos de 2 segundos y entra en régimen estacionario en menos de 10 segundos con un valor entre 0.196 y 0.204 rad. Teorı́a de Control II - 66.28 Trabajo Práctico Página 3 de 4 αθ δ Figura 2: Control de ángulo de elevación Sobrepico: menor que 10 % Tiempo de crecimiento: menor a 2 segundos Tiempo de establecimiento: menor a 10 segundos Error estático: menor que 2 % Sistema a lazo abierto (a) Escribir el modelo en espacio de estados del sistema en la forma ẋ = Ax + Bu , y = Cx + Du . Analizar su estabilidad a lazo abierto y sus propiedades de controlabilidad y observabilidad. Obtener la función transferencia entre la entrada de control δ y el ángulo de elevación θ y analizar posibles limitaciones de diseño. Diseño por realimentación de estados (b) Diseñar la ganancia de realimentación de estados K de la Figura 3 para que la salida del sistema θ satisfaga las especificaciones de diseño para un escalón en la referencia r. (Una vez que K se ha ajustado para una respuesta dinámica satisfactoria, determinar la ganancia N para compensar el error estático.) r δ N θ Ax ẋ Bu K Figura 3: Esquema de realimentación de estados Implementar el sistema en Simulink y graficar la respuesta del sistema a lazo cerrado a un escalón en la referencia de 0.2 rad, y a una perturbación de salida ( 0 0 ≤ t < 10 do (t) = 0,05 10 ≤ t. Discutir los resultados. Diseño por realimentación de estados con acción integral (c) Modificar el diseño de la Figura 3 como sea necesario para incorporar acción integral en la regulación de θ, mejorando las propiedades de robustez y rechazo de perturbaciones. Recalcular las ganancias de realimentación para cumplir con las especificaciones de diseño. Diseño por realimentación de salida con acción integral Teorı́a de Control II - 66.28 Trabajo Práctico Página 4 de 4 (d) Suponer ahora que θ es la única variable medible del sistema. Diseñar un observador de estados para convertir el diseño del punto anterior en un controlador dinámico (sistema controlador-observador) por realimentación de salida. (Nota: para poder diseñar el observador podrı́a ser necesario modificar la realimentación de estados K. ¿Por qué?) (e) Implementar el esquema de controlador-observador en Simulink y repetir el ensayo del punto (b). Comparar los resultados.